

-
摘要: 如何通过猕猴运动皮层的神经元锋电位信号估计其手指移动位置是一神经解码问题,现存方法解决该问题大多采用有监督训练,需要通过训练数据得到神经元锋电位信号与手指移动位置的关系,因此其估计性能依赖于训练数据.本文提出了一种无监督解码方法,该方法基于状态空间模型(State space model,SSM),利用神经网络得到神经元锋电位数与手指移动位置的关系权值,再用逐次状态估计方法去估计手指移动的位置.为减少训练的复杂度和提高估计准确度,采用一种非线性的积分卡尔曼滤波(Cubature Kalman filtering,CKF)来完成神经网络的训练和手指位置的逐次状态估计.与传统方法相比,该方法的最大特点是无监督,可以由神经元锋电位簇向量直接估计手指移动位置,而无需有监督训练.实验结果显示,当采用较少的有监督数据,现存方法与本文方法相比有较大的估计误差;当采用较多的有监督数据,现存方法才具有与本文方法相近似的估计误差.Abstract: How to estimate macaque's moving finger position through neuron spikes in his mortor cortex is a problem about neural decoding. For the problem, most of existing methods use a supervised training algorithm and require supervised data to obtain the relationship between the spikes and the finger's moving position. Therefore, the performance of the existing methods depends on the training data. This paper proposes an unsupervised decoding method, which, based on a state space model (SSM), adopts neural networks to obtain the weights between the neuron spikes and the finger's moving position, and then estimates the finger's position through sequential state estimators. To reduce computational complexity and enhance estimation accuracy, a nonlinear cubature Kalman filter (CKF) is used to train the neural network and estimate the sequential moving positions. Compared with the existing methods, the proposed method's advantage is to be unsupervised. It could estimate the finger's position only through the spike vector instead of the supervised training data. Experiment results show that the existing methods have more estimation errors than the proposed method when a small amount of supervised data is adopted, and that the existing ones have similar estimation errors only when more supervised data adopted.1) 本文责任编委 田捷
-
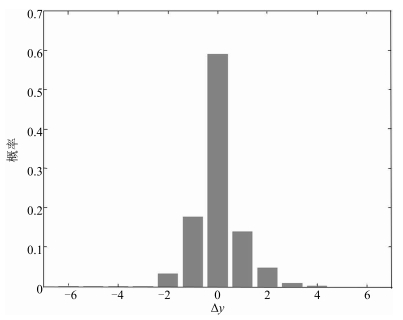
图 2 相邻两时刻纵坐标间差值${\Delta y}$的分布概率图
Fig. 2 An example for the distribution of ${\Delta y}$
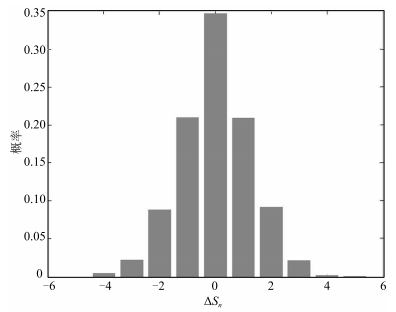
图 3 相邻两时刻纵坐标间差值${\Delta s}$的分布概率图
Fig. 3 An example for the distribution of ${\Delta s}$
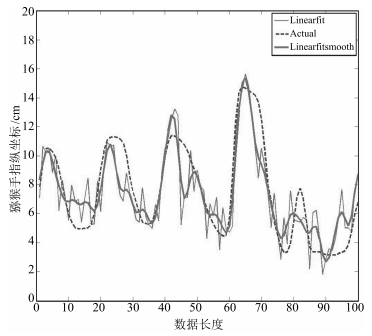
图 6 线性拟合位置估计与手指移动实际位置曲线对比
Fig. 6 Linear fitting position estimation compared with fingers moving curve of actual position
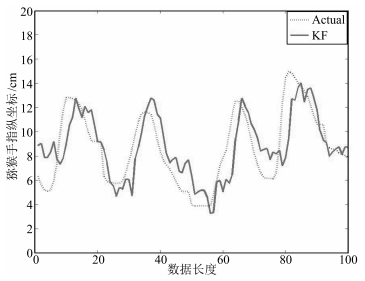
图 7 KF位置估计与手指移动实际位置曲线对比
Fig. 7 KF algorithm position estimation compared with fingers moving curve of actual position
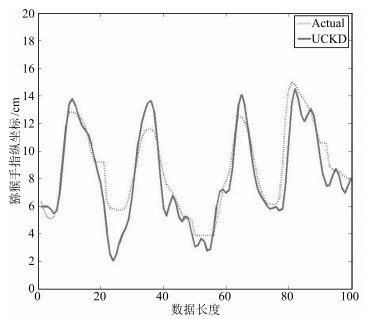
图 8 UCKD位置估计与手指移动实际位置曲线对比
Fig. 8 UCKD algorithm position estimation compared with fingers moving curve of actual position
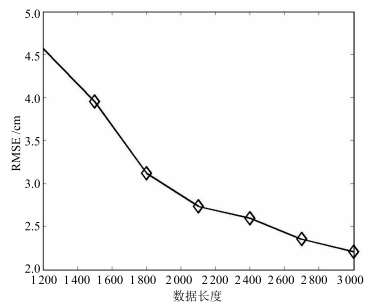
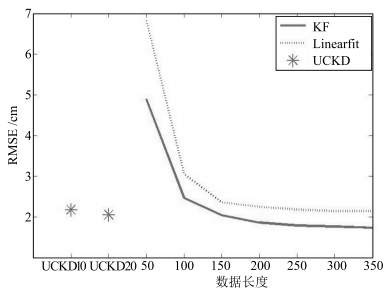
图 10 UCKD算法随数据长度变化的位置估计RMSE曲线图
Fig. 10 UCKD algorithm with data length change of position estimation RMSE curve
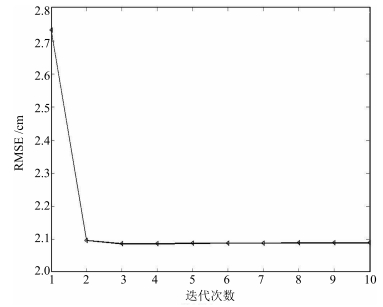
表 1 5次训练的RMSE (cm)
Table 1 Five times the RMSE of training (cm)
训练次数 第1组 第2组 第3组 第4组 第5组 均值 方差 1 3.835 4.098 4.470 3.480 4.165 4.010 0.139 2 3.207 4.154 4.293 3.045 3.708 3.681 0.307 3 2.658 4.009 3.434 2.485 2.812 3.080 0.398 4 2.203 3.144 2.493 2.277 2.248 2.473 0.153 5 2.151 2.528 2.219 2.218 2.113 2.246 0.027 6 2.144 2.347 2.173 2.194 2.080 2.188 0.010 7 2.147 2.328 2.163 2.182 2.073 2.179 0.009 8 2.153 2.342 2.158 2.178 2.065 2.179 0.010 9 2.160 2.365 2.155 2.177 2.060 2.171 0.007 10 2.166 2.389 2.153 2.179 2.058 2.170 0.007  下载: 导出CSV
下载: 导出CSV
-
[1] Wallisch P, Lusignan M E, Benayoun M D, Baker T I, Dickey A S, Hatsopoulos N G. MATLAB For Neuroscientists (2nd edition). London:Elsevier, 2014. [2] Gabbiani F, Cox S J. Mathematics for Neuroscientists. London:Elsevier, 2010. [3] Kass R E, Eden U T, Brown E N. Analysis of Neural Data. New York:Springer, 2014. [4] Hatsopoulos N G, Ojakangas C L, Paninski L, Donoghue J P. Information about movement direction obtained from synchronous activity of motor cortical neurons. Proceedings of the National Academy of Sciences of the United States of America, 1998, 95(26):15706-15711 doi: 10.1073/pnas.95.26.15706 [5] Hatsopoulos N G, Xu Q Q, Amit Y. Encoding of movement fragments in the motor cortex. The Journal of Neuroscience, 2007, 27(19):5105-5114 doi: 10.1523/JNEUROSCI.3570-06.2007 [6] Moran D W, Schwartz A B. Motor cortical representation of speed and direction during reaching. Journal of Neurophysiology, 1999, 82(5):2676-2692 https://www.researchgate.net/publication/12740618_Motor_cortical_representation_of_speed_and_direction_during_reaching [7] Reynaud-Bouret P, Rivoirard V, Grammont F, Tuleau-Malot C. Goodness-of-fit tests and nonparametric adaptive estimation for spike train analysis. Journal of Mathematical Neuroscience, 2014, 4(1):1-41 doi: 10.1186/2190-8567-4-1 [8] Georgopoulos A P, Kettner R E, Schwartz A B. Primate motor cortex and free arm movements to visual targets in three-dimensional space. II. Coding of the direction of movement by a neuronal population. The Journal of Neuroscience, 1988, 8(8):2928-2937 [9] Brockwell A E, Rojas A L, Kass R E. Recursive Bayesian decoding of motor cortical signals by particle filtering. Journal of Neurophysiology, 2004, 91(4):1899-1907 doi: 10.1152/jn.00438.2003 [10] Brockwell A E, Kass R E, Schwartz A B. Statistical signal processing and the motor cortex. Proceedings of the IEEE, 2007, 95(5):881-898 doi: 10.1109/JPROC.2007.894703 [11] Wu W, Shaikhouni A, Donoghue J P, Black M J. Closed-loop neural control of cursor motion using a Kalman filter. In:Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. San Francisco, CA:IEEE, 2004. 4126-4129 [12] Wu W, Gao Y, Bienenstock E, Donoghue, J P, Black M J. Bayesian population decoding of motor cortical activity using a Kalman filter. Neural Computation, 2006, 18(1):80-118 doi: 10.1162/089976606774841585 [13] Ebitz R B, Platt M L. Neuronal activity in primate dorsal anterior cingulate cortex signals task conflict and predicts adjustments in pupil-linked arousal. Neuron, 2015, 85(3):628-640 doi: 10.1016/j.neuron.2014.12.053 [14] Wang W, Sudre G P, Xu Y, Kass R E, Collinger J L, Degenhart A D, Bagic A I, Weber D J. Decoding and cortical source localization for intended movement direction with MEG. Journal of Neurophysiology, 2010, 104(5):2451-2461 doi: 10.1152/jn.00239.2010 [15] Campbell J, Sharma A. Visual cross-modal re-organization in children with cochlear implants. PLoS One, 2016, 11(1):e0147793 doi: 10.1371/journal.pone.0147793 [16] Hochberg L R, Serruya M D, Friehs G M, Mukand J A, Saleh M, Caplan A H, Branner A, Chen D, Penn R D, Donoghue J P. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature, 2006, 442(7099):164-171 doi: 10.1038/nature04970 [17] Serruya M D, Hatsopoulos N G, Paninski L, Fellows M R, Donoghue J P. Instant neural control of a movement signal. Nature, 2002, 416(6877):141-142 doi: 10.1038/416141a [18] Warland D K, Reinagel P, Meister M. Decoding visual information from a population of retinal ganglion cells. Journal of Neurophysiology, 1997, 78(5):2336-2350 https://www.researchgate.net/publication/2600215_Decoding_Visual_Information_From_a_Population_of_Retinal_Ganglion_Cells [19] Czanner G, Eden U T, Wirth S, Yanike M, Suzuki W A, Brown E N. Analysis of between-trial and within-trial neural spiking dynamics. Journal of Neurophysiology, 2008, 99(5):2672-2693 doi: 10.1152/jn.00343.2007 [20] Malik W Q, Hochberg L R, Donoghue J P, Brown E N. Modulation depth estimation and variable selection in state-space models for neural interfaces. IEEE Transactions on Biomedical Engineering, 2015, 62(2):570-581 doi: 10.1109/TBME.2014.2360393 [21] Brown E N, Frank L M, Tang D D, Quirk M C, Wilson M A. A statistical paradigm for neural spike train decoding applied to position prediction from ensemble firing patterns of rat hippocampal place cells. The Journal of Neuroscience, 1998, 18(18):7411-7425 http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.111.7351 [22] Shanechi M M, Wornell G W, Williams Z M, Brown E N. Feedback-controlled parallel point process filter for estimation of goal-directed movements from neural signals. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(1):129-140 doi: 10.1109/TNSRE.2012.2221743 [23] Sanger T D. Neural population codes. Current Opinion in Neurobiology, 2003, 13(2):238-249 doi: 10.1016/S0959-4388(03)00034-5 [24] Zhang K C, Sejnowski T J. Accuracy and learning in neuronal populations. Progress in Brain Research, 2001, 130:333-342 doi: 10.1016/S0079-6123(01)30022-5 [25] Haykin S O. Neural Networks and Learning Machines (3rd edition). New Jersey:Pearson Education, Inc., 2009. [26] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269 doi: 10.1109/TAC.2009.2019800 [27] Friedman N. The Bayesian structural EM algorithm. In:Proceedings of the 14th Conference on Uncertainty in Artificial Intelligence. San Francisco, CA, USA:Morgan Kaufmann Publishers Inc., 1998. 129-138 [28] Chou Y L. Statistical Analysis. Holt International, 1975. -

 下载:
下载:


计量
- 文章访问数: 2522
- HTML全文浏览量: 278
- PDF下载量: 592
- 被引次数: 0
