

A New Method for Extraction of Process Differential Signal Based onSingle-frequency-pass Filter
-
摘要: 针对经典微分方法存在显著的干扰放大效应和非线性微分方法的不足,提出了一种新型线性微分方法.文中分析了对象阶跃激励响应和正弦激励响应的内在关联.指出了在一定的条件下,可通过对象的正弦激励响应获取对象阶跃激励响应的微分信号.并给出了一种点频滤波器能够实现阶跃激励到正弦激励的转换方法.进而由点频滤波器和一种新型正弦跟踪滤波器等构建了一种新型微分信号提取的逻辑回路结构.文中提出的方法具有良好的抗噪声干扰特性,是线性滤波技术的发展与延伸,并具有良好的理论意义和实际应用前景,可作为经典控制理论的有益补充.数学分析、仿真实验和实际应用的结果进一步证实了文中所述方法的正确性和有效性.Abstract: Aimed at the severely amplified disturbance in the traditional differential operators and non-linear differential methods, a novel linear differential method is proposed. In this paper, the inter-relationship between step response and sine response of plants is analyzed. It is pointed out that under certain conditions, the differential component of the step response of a plant could be extracted from the sinusoidal excitation signal upon the same plant. And a new method is proposed that step excitations of a plant could be transformed to sinusoidal excitations through single-frequency-pass filter. Furthermore, a logic structure to extract the differential component of process signals is constructed via single-frequency-pass filters and a new type sinusoid tracking filter. Superior anti-noise characteristics could be obtained with the proposed method, which is the development and extension of linear filters, and possesses good theoretical significance and practical application prospect. Mathematical analysis, simulation experiment, and practical application results have shown that the new method is correct and valid.
-
微分运算[1-2]在诸多领域包括控制工程领域有广泛的应用, 但理想微分在物理上不可实现.实时微分器主要存在时间滞后的问题, 如相对理想微分存在滞后.长期以来, 人们一直在寻找尝试各种能够解决滞后问题的途径.
文献[3]通过一种扩展高增益观测器进行 $n$ 阶导数估计, 文献[4]通过高增益微分器进行任意阶导数估计, 文献[5]指出高增益微分器的噪声干扰输出较大.线性跟踪微分器[6]主要在滞后特性与干扰输出特性之间存在较大的矛盾.由于非线性滤波方法能够显著影响信号的特性, 人们在非线性的微分方法上取得了较大的进展, 文献[7]提出了一种非线性的微分方法, 韩京清[8]开创性地提出了非线性跟踪微分器 (Nonlinear tracking differentiator, NTD) 的思想.研究和分析NTD的思想, 经典微分器与二阶低通滤波器的结合具有较好的噪声滤波特性, 但低阶微分特性较差或滞后较大.滞后的主要原因是二阶低通滤波器的输出相对输入的"跟踪效率"不高.采用非线性的最速跟踪方法能够有效提高所述的"跟踪效率", 用于构造非线性二阶跟踪微分器具有良好的低阶微分特性.
非线性跟踪微分器NTD [8-10]是自抗扰控制技术 (Active disturbance rejection control, ADRC) [8, 11-16]的重要组成部分, 主要适合于工程控制上提取微分信号.但是, 非线性方法也存在明显的不足, 文献[17]指出, 非线性最速跟踪方法对不同性质的输入信号, 例如阶跃信号、斜坡信号、抛物线信号等呈现出不同的跟踪特性.
为了能够从本质上改善线性微分器的滞后特性, 作者通过长期工程实践的探索, 提出了一种特性优良的新型线性微分方法, 显著特点是:滞后时间较小, 与理想微分的近似度较高, 抗噪声干扰特性较强等.文中从信号处理的角度, 对新型微分器和一种二阶跟踪微分器进行了较为全面的分析与比较.
文中变量的表达具有唯一性, 可相互引用.为便于分析, 文中所述对象均指等容惯性环节.
1. 过程信号分析
对象过程信号的构成, 是文中信号分析的重要基础.
1.1 阶跃函数激励
阶跃函数激励 (简称阶跃激励) 是控制工程领域中普遍采用的一种激励形式.
1.1.1 对象阶跃激励响应
以二阶和四阶对象为例, 单位阶跃激励响应的过程信号为式 (1):
$ \begin{eqnarray*} \begin{split} Y_{\rm{2}} (t) = & L^{{\rm{ - 1}}} { \Bigg[}\frac{{\rm{1}}}{{{\rm{(1}} + T_{\rm{\alpha }} s{\rm{)}}^{\rm{2}} }}\frac{{\rm{1}}}{s}{\Bigg]} = \\ &{\rm{ 1}} - Y_{{\rm{d}}1} (t) - Y_{{\rm{d}}2} (t) \end{split} \end{eqnarray*} $
$ \begin{eqnarray} \begin{split} &Y_{\rm{4}} (t) = L^{{\rm{ - 1}}} {\Bigg{[}}\frac{{\rm{1}}}{{{\rm{(1}} + T_{\rm{\alpha }} s{\rm{)}}^{\rm{4}} }}\frac{{\rm{1}}}{s}{\Bigg{]}} = \\ &\quad {\rm{ 1}} - Y_{{\rm{d}}1} (t) - Y_{{\rm{d}}2} (t) - Y_{{\rm{d}}3} (t) - Y_{{\rm{d}}4} (t){\rm{ }} \\ &Y_{{\rm{d1}}} (t) = {\rm e}^{ - \frac{t}{{T_{\rm{\alpha }} }}}, ~~~{\rm{ }}Y_{{\rm{d}}2} (t) = \frac{t}{{T_{\rm{\alpha }} }}{\rm{ }}{\rm e}^{ - \frac{t}{{T_{\rm{\alpha }} }}} \\ &Y_{{\rm{d}}3} (t) = \frac{1}{2}\Big(\frac{t}{{T_{\rm{\alpha }} }}{\Big{)}}^{\rm{2}} {\rm{ }}{\rm e}^{ - \frac{t}{{T_{\rm{\alpha }} }}} {\rm{, ~~~}} Y_{{\rm{d}}4} (t) = \frac{1}{6}\Big(\frac{t}{{T_{\rm{\alpha }} }}{\Big{)}}^{\rm{3}} {\rm{ }}{\rm e}^{ - \frac{t}{{T_{\rm{\alpha }} }}} \\ \end{split} \end{eqnarray} $
(1) 式中, Y $_{\textrm{2}}$ (t) 和Y $_{\textrm{4}}$ (t) 分别为二阶对象和四阶对象在单位阶跃激励下的过程信号. T $_{\alpha}$ 为对象惯性常数, 单位s. Y $_{\textrm{d1}}$ (t)、Y $_{\textrm{d2}}$ (t)、Y $_{\textrm{d3}}$ (t)、Y $_{\textrm{d4}}$ (t) 分别为所述过程信号中的一阶、二阶、三阶、四阶理想微分信号成分.
1.1.2 理想微分运算
通过理想微分运算可提取过程信号中的理想微分信号.以式 (1) 给出的Y $_{\textrm{4}}$ (t) 为例, 见式 (2):
$ \begin{eqnarray} \begin{split} &Y_{\textrm{4-d}} {\rm{(}}t{\rm{)}} = L^{ - {\rm{1}}} {\Bigg{[}}\frac{{\rm{1}}}{{{\rm{(1}} + T_{\rm{\alpha }} {\rm{s)}}^{\rm{4}} }}W_{\rm{D}} {\rm{(}}s{\rm{)}}\frac{{\rm{1}}}{s}{\Bigg{]}} = Y_{{\rm{d4}}} (t) \\ &W_{\rm{D}} {\rm{(}}s{\rm{)}} = T_{\rm{D}} s, ~~~{\rm{ }}T_{\rm{D}} = T_{\rm{\alpha }} {\rm{ }} \\ \end{split} \end{eqnarray} $
(2) 式中, Y $_{\textrm{4-d}}$ (t) 为Y $_{\textrm{4}}$ (t) 的理想微分运输信号, 运算的结果得到Y $_{\textrm{d4}}$ (t). W $_{\textrm{D}}$ (s) 为理想微分运算传递函数, T $_{\textrm{D}}$ 为理想微分常数, 单位s.式中T $_{\textrm{D}}$ =T $_{\alpha}$ .
1.2 正弦函数激励
正弦函数激励 (简称正弦激励) 是新型微分方法在信号分析上的主要理论基础.
1.2.1 高阶对象的正弦激励响应
在阶数 $\geq3$ 时称为高阶对象, 以四阶对象为例, 单位正弦激励响应的过程信号为式 (3):
$ \begin{eqnarray} \begin{split} Y_{{\rm{4}} \mbox{-} {\rm{sin}}} (t) = & L^{ - 1} \left[\frac{{\rm{1}}}{{{\rm{(}}T_{\rm{\alpha }} s + {\rm{1)}}^{\rm{4}} }}\Big(\frac{{\omega _{\rm{s}} }}{{\omega _{\rm{s}} ^2 + s^2 }}\Big)\right] = \\ &G(\omega _{\rm{s}} )\sin {\rm{[}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d4}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{2}} \sin {\rm{[2}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d3}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{3}} \sin {\rm{[3}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d2}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{4}} \sin {\rm{[4}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d1}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{4}} \sin {\rm{[}}\omega _{\rm{s}} t-{\rm{4}}\varphi (\omega _{\rm{s}} ){\rm{]}} \\ &G(\omega _{\rm{s}} ) = \frac{{\rm{1}}}{{\sqrt {1 + (T_{\rm{\alpha }} \omega _{\rm{s}} )^2 } }}, ~~~ \omega _{{\rm{ - 3dB}}} = \frac{{\rm{1}}}{{T_{\rm{\alpha }} }}{\rm{ }} \\ &\varphi (\omega _{\rm{s}} ) = {\rm tg}^{ - 1} (\omega _{\rm{s}} T_a {\rm{)}} \\ \end{split} \end{eqnarray} $
(3) 式中, Y $_{\textrm{4-sin}}$ (t) 为四阶对象在单位正弦激励下的过程信号, 包含理想微分信号Y $_{{\textrm{d1}}}$ (t)、Y $_{{\textrm{d2}}}$ (t)、Y $_{{\textrm{d3}}}$ (t)、Y $_{{\textrm{d4}}}$ (t) 的成分和稳态正弦成分. $\omega_{\textrm{s}}$ 为正弦激励频率, 单位rad/s. G $(\omega_{\textrm{s}})$ 为一阶对象在 $\omega _{\textrm{s}}$ 的频域幅值增益, 无量纲. $\varphi(\omega_{\textrm{s}})$ 为一阶对象在 $\omega_{\textrm{s}}$ 的频域移相, 单位rad. $\omega_{-\textrm{3dB}}$ 为一阶对象频域截止频率, 单位rad/s.
1.2.2 低阶对象的正弦激励响应
在阶数 $\leq2$ 时称为低阶对象, 以二阶对象为例, 单位正弦激励响应的过程信号为式 (4):
$ \begin{eqnarray} \begin{split} Y_{\textrm{2-sin}} (t)& = L^{ - 1} \left[\frac{{\rm{1}}}{{{\rm{(}}T_{\rm{\alpha }} s + {\rm{1)}}^{\rm{2}} }}\Big(\frac{{\omega _{\rm{s}} }}{{\omega _{\rm{s}} ^2 + s^2 }}\Big)\right] = \\ &G(\omega _{\rm{s}} )\sin {\rm{[}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d2}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{2}} \sin {\rm{[2}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d1}}} (t) + \\ &G(\omega _{\rm{s}} )^{\rm{2}} \sin {\Big{[}}\omega _{\rm{s}} t-{\rm{2}}\varphi (\omega _{\rm{s}} ){\Big{]}} \\ \end{split} \end{eqnarray} $
(4) 式中, Y $_{\textrm{2-sin}}$ (t) 为二阶对象在单位正弦激励下的过程信号, 包含理想微分信号Y $_{\textrm{d1}}$ (t) 和Y $_{\textrm{d2}}$ (t) 的成分和稳态正弦成分.
2. 新型微分方法原理
理论研究结果表明, 对象的正弦激励响应, 随着正弦激励频率的提高将发生本质性的改变, 在一定的条件下, 可通过对象的正弦激励响应获取对象的阶跃激励响应的近似理想微分信号, 这即是新型微分方法的基本原理.
2.1 高阶对象正弦激励响应分析
以四阶对象为例, 在 $\omega_{\textrm{s}}$ =10 $\omega_{-\textrm{3dB}}$ , 以Y $_{\textrm{d4}}$ (t) 的幅值为基准, 得到Y $_{\textrm{4-sin}}$ (t) 成分构成的相对比例, 见表 1.
表 1 相对比例1Table 1 Relative proportion of 1成分 Y $_{\textrm{d4}}$ (t) Y $_{\textrm{d3}}$ (t) Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 相对比例 1.0 0.0198 -0.0095 -0.00038 0.00098 表 1可见, Y $_{\textrm{4-sin}}$ (t) 成分的构成以Y $_{\textrm{d4}}$ (t) 的成分为主, 其他信号成分的相对比例不足2 %, 特别是稳态正弦信号的成分不足0.1 %.从工程的角度看, 可将Y $_{\textrm{4-sin}}$ (t): G $(\omega_{\textrm{s}})$ 近似为Y $_{\textrm{d4}}$ (t), 而且近似的质量较高.因此, 可将式 (3) 近似为式 (5):
$ \begin{eqnarray} \begin{split} \mathop {Y_{{\textrm{4-sin}}} (t)}\limits_{\omega _{\rm{s}} > > \omega _{{\rm{ - 3dB}}} } \approx G(\omega _{\rm{s}} )Y_{{\rm{d4}}} (t) \end{split} \end{eqnarray} $
(5) 2.2 低阶对象正弦激励响应分析
以二阶对象为例, 在 $\omega_{\textrm{s}}$ =10 $\omega_{-\textrm{3dB}}$ , 以Y $_{\textrm{d2}}$ (t) 的幅值为基准, 得到Y $_{\textrm{2-sin}}$ (t) 成分构成的相对比例, 见表 2.
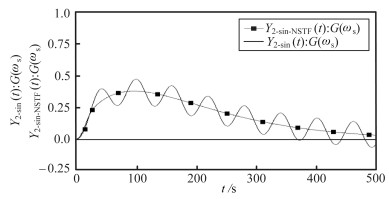
表 2 相对比例2Table 2 Relative proportion of 2成分 Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 相对比例 1.0 0.0198 0.0995 表 2可见, Y $_{\textrm{2-sin}}$ (t) 成分的构成虽然以Y $_{\textrm{d2}}$ (t) 的成分为主, 但稳态正弦信号成分的相对比例接近10 %.其中在T $_{\alpha}=100$ s, $\omega_{\textrm{s}}$ =10 $\omega_{-\textrm{3dB}}$ , 得到Y $_{\textrm{2-sin}}$ (t) 的仿真实验结果, 图 1所示.
图 1所示, 在Y $_{\textrm{2-sin}}$ (t) 中, 存在明显的稳态正弦信号成分, 如果将Y $_{\textrm{2-sin}}$ (t):G( $\omega_{\textrm{s}}$ ) 直接近似为Y $_{\textrm{d2}}$ (t), 则近似的质量较差.图 1中Y $_{\textrm{2-sin-NSTF}}$ (t) 为Y $_{\textrm{2-sin}}$ (t) 激励下的新型正弦跟踪滤波信号.
2.3 新型正弦跟踪滤波器
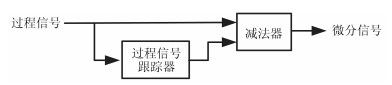
为了获取质量较高的微分信号, 需要对正弦激励响应的过程信号进行适当的滤波处理.本文提出了一种新型正弦跟踪滤波方法, 如图 2所示.
用新型正弦跟踪器跟踪输入信号中的正弦信号成分, 然后通过减法器在滤波器的输出端消除正弦信号成分.
新型正弦跟踪滤波器还用于对激励方式转换环节在频域的谐振峰进行抑制 (在第3.4节中叙述).
2.3.1 新型正弦跟踪器
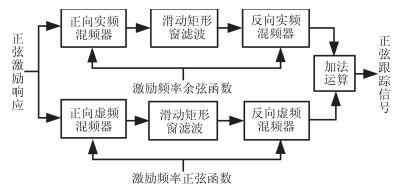
正弦跟踪器是一种带通滤波器, 例如可采用LCR (电感、电容、电阻) 带通滤波器[18], 由于该滤波器的特性不理想, 文中采用了一种根据正交混频方法[19]的新型正弦跟踪器结构, 如图 3所示:
新型正弦跟踪器由正向正交混频、滑动矩形窗滤波、反向正交混频、加法运算等所组成.
文中以Y $_{\textrm{2-sin}}$ (t) 激励为例, 对新型正弦跟踪器的信号处理过程进行分析.
2.3.2 正向正交混频信号分析
混频的实质是乘法运算, 正向正交混频由正向实频混频和正向虚频混频组成.其中正向实频混频信号为式 (6):
$ \begin{eqnarray} \begin{split} &R(t) =Y_{{\textrm{2-sin}}} (t)\cos (\omega _{\rm{s}} t + \beta ) = \\ &~~~~~~~~~~~~~R_{\rm{o}} (t) + R_{{\rm{2}}\omega } (t) + R_{{\rm{AM}}} {\rm{(}}t{\rm{)}} \\ &R_{\rm{o}} (t) = - \frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{sin}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]}}{{\rm{2}}} \\ &R_{{\rm{2}}\omega } (t) = \frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{sin}}[2\omega _{\rm{s}} t-{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]{\rm{ }}}}{{\rm{2}}} \\ &R_{{\rm{AM}}} {\rm{(}}t{\rm{)}} = {\rm{\{ }}G(\omega _{\rm{s}} )\sin {\rm{[}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d2}}} (t) + \\ &~~~~~~~~~~~~~~~~~~G(\omega _{\rm{s}} )^{\rm{2}} \sin {\rm{[2}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d1}}} (t){\rm{\} }}\cos (\omega _{\rm{s}} t + \beta ) \\ \end{split} \end{eqnarray} $
(6) 式中, R(t) 为正向实频信号, 由直流成分R $_{\textrm{o}}$ (t)、2 $\omega_{\textrm{s}}$ 成分R $_{\textrm{2}\omega}$ (t)、 $\omega_{\textrm{s}}$ 调幅成分R $_{\textrm{AM}}$ (t) 等构成. $\beta$ 为激励频率余弦函数的初相位, 单位rad, 为任意值.
正向虚频混频信号为式 (7):
$ \begin{eqnarray} \begin{split} &I(t) = Y_{{\textrm{2-sin}}} (t){\rm{sin}}(\omega _{\rm{s}} t + \beta ) = \\ &~~~~~~~~~~~~~I_{\rm{o}} (t) + I_{{\rm{2}}\omega } (t) + I_{{\rm{AM}}} {\rm{(}}t{\rm{)}} \\ &I_{\rm{o}} (t) = \frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{cos}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]}}{2} \\ &I_{{\rm{2}}\omega } (t) = - \frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{cos}}[2\omega _{\rm{s}} t-{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]}}{2}{\rm{ }} \\ &I_{{\rm{AM}}} {\rm{(}}t{\rm{)}} = {\rm{\{ }}G(\omega _{\rm{s}} )\sin {\rm{[}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d2}}} (t) + \\ &~~~~~~~~~~~~~~~~~~G(\omega _{\rm{s}} )^{\rm{2}} \sin {\rm{[2}}\varphi (\omega _{\rm{s}} ){\rm{]}}Y_{{\rm{d1}}} (t){\rm{\} sin}}(\omega _{\rm{s}} t + \beta ) \\ \end{split} \end{eqnarray} $
(7) 式中, I(t) 为正向虚频信号, 由直流成分I $_{\textrm{o}}$ (t)、2 $\omega_{\textrm{s}}$ 成分I $_{\textrm{2}\omega}$ (t)、 $\omega_{\textrm{s}}$ 调幅成分I $_{\textrm{AM}}$ (t) 等构成.
2.3.3 滑动矩形窗滤波分析
通过滑动矩形窗滤波, 从所述正向混频信号中提取直流成分, 如式 (8):
$ \begin{eqnarray} \begin{split} R_{\rm{w}} (t) & = \frac{{\rm{1}}}{{T_{\rm{w}} }}\int_\infty ^{} {{\rm{[}}R{\rm{(}}t{\rm{)}}-R{\rm{(}}t-T_{\rm{w}} {\rm{)]}}} {\rm{d}}t \approx R_{\rm{o}} (t) \approx \\ &-\frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{sin}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]}}{2} \\ I_{\rm{w}} (t) = & \frac{{\rm{1}}}{{T_{\rm{w}} }}\int_\infty ^{} {{\rm{[}}I{\rm{(}}t{\rm{)}}-I{\rm{(}}t-T_{\rm{w}} {\rm{)]}}} {\rm{d}}t \approx I_{\rm{o}} (t) \approx \\ &\frac{{G(\omega _{\rm{s}} )^{\rm{2}} {\rm{cos}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]}}{2} \\ &T_{\rm{w}} = T_{\rm{s}}, ~~~{\rm{ }}T_{\rm{s}} = \frac{{{\rm{2}}\pi }}{{\omega _{\rm{s}} }} \\ \end{split} \end{eqnarray} $
(8) 式中, R $_{\textrm{w}}$ (t) 为正向实频滤波信号, I $_{\textrm{w}}$ (t) 为正向虚频滤波信号. T $_{\textrm{w}}$ 为滑动矩形窗时间长度, 单位s. T $_{\textrm{s}}$ 为正弦激励频率 $\omega_{\textrm{s}}$ 的周期, 单位s.在T $_{\textrm{w}}$ =T $_{\textrm{s}}$ , 滑动矩形窗滤波能够滤除或衰减激励频率 $\omega_{\textrm{s}}$ 的调幅成分、完全滤除2 $\omega_{\textrm{s}}$ 的成分.
2.3.4 反向正交混频信号分析
通过反向正交混频和加法运算, 获取正弦跟踪信号, 如式 (9):
$ \begin{eqnarray} \begin{split} Y_{{\rm{2}-sin-} {\rm{NST}}} (t) = & 2R_{\rm{w}} (t){\rm{cos}}(\omega _{\rm{s}} t + \beta ) + \\ &2I_{\rm{w}} (t){\rm{sin}}(\omega _{\rm{s}} t + \beta ) = \\ & -G(\omega _{\rm{s}} )^{\rm{2}} {\rm{sin}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]{\rm{cos}}(\omega _{\rm{s}} t + \beta ) + \\ &G(\omega _{\rm{s}} )^{\rm{2}} {\rm{cos}}[{\rm{2}}\varphi (\omega _{\rm{s}} ) + \beta]{\rm{sin}}(\omega _{\rm{s}} t + \beta ) = \\ &G(\omega _{\rm{s}} )^{\rm{2}} {\rm{sin}}[\omega _{\rm{s}} t-{\rm{2}}\varphi (\omega _{\rm{s}} )] \\ \end{split} \end{eqnarray} $
(9) 式中, Y $_{\textrm{2-sin-NST}}$ (t) 为Y $_{\textrm{2-sin}}$ (t) 激励下的新型正弦跟踪信号, 加法运算的比例系数为2. Y $_{\textrm{2-sin-NST}}$ (t) 较好地跟踪了Y $_{\textrm{2-sin}}$ (t) 中的稳态正弦信号.
2.3.5 微分激励抑制特性仿真实验
由于实际正弦跟踪器的输入信号以微分信号的成分为主, 例如Y $_{\textrm{d2}}$ (t) 等.因此, 对微分信号的抑制特性直接决定了新型微分器的滞后特性.其中在T $_{\alpha}$ =100 s, T $_{\textrm{w}}$ =T $_{\textrm{s}}$ =62.83 s, 用Y $_{\textrm{d2}}$ (t) 直接激励新型正弦跟踪器, 得到的实验结果, 图 4所示.
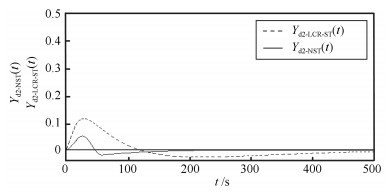 图 4 新型正弦跟踪器的二阶微分激励特性示意图Fig. 4 The 2nd order differential excitation response of a new type sinusoid tracker
图 4 新型正弦跟踪器的二阶微分激励特性示意图Fig. 4 The 2nd order differential excitation response of a new type sinusoid tracker图 4所示, Y $_{\textrm{d2-NST}}$ (t) 为Y $_{\textrm{d2}}$ (t) 直接激励下的新型正弦跟踪信号, 对Y $_{\textrm{d2}}$ (t) 的抑制特性较好.表明了新型正弦跟踪器能够有效减小微分信号的滞后.图 4中Y $_{\textrm{d2-LCR-ST}}$ (t) 为Y $_{\textrm{d2}}$ (t) 直接激励下的LCR正弦跟踪信号.
2.3.6 新型正弦跟踪滤波信号
将Y $_{\textrm{2-sin}}$ (t) 与Y $_{\textrm{2-sin-NST}}$ (t) 相减, 消除稳态正弦信号, 如式 (10):
$ \begin{eqnarray} \begin{split} &Y_{{\rm{2-sin-NSTF}}} (t) = \\ &\quad Y_{\textrm{{2}-} {\rm{sin}}} (t) - Y_{{\textrm{2-sin-NST}}} (t) \approx G{\rm{(}}\omega _{\rm{s}} {\rm{)}}Y_{{\rm{d2}}} (t) \\ \end{split} \end{eqnarray} $
(10) 式中, Y $_{\textrm{2-sin-NSTF}}$ (t) 为Y $_{\textrm{2-sin}}$ (t) 激励下的新型正弦跟踪滤波信号, 近似为G $(\omega_{\textrm{s}})Y$ $_{\textrm{d2}}$ (t).
在T $_{\alpha}$ =100 s, $\omega_{\textrm{s}}$ =10 $\omega_{-\textrm{3dB}}$ , 得到Y $_{\textrm{2-sin-NSTF}}$ (t) 的仿真实验结果, 图 1所示. Y $_{\textrm{2-sin-NSTF}}$ (t) 消除了Y $_{\textrm{2-sin}}$ (t) 中的稳态正弦信号成分.
3. 激励方式转换
正弦激励形式是新型微分方法的基础, 实际通常采用阶跃激励形式.但如果用对象的阶跃激励响应再激励一种"点频滤波器" [18], 则可将对象的阶跃激励转换为对象的正弦激励效果, 实现激励方式的转换.
3.1 点频滤波器
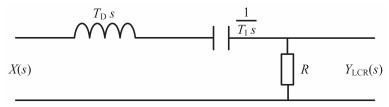
所谓的"点频滤波器"就是频率带宽为零的带通滤波器, 实际采用LCR带通滤波器[18]重构, 图 5所示.
可用式 (11) 表达图 5中X(s) 与Y $_{\textrm{LCR}}$ (s) 两者之间的关系:
$ \begin{eqnarray} \begin{split} &W_{{\rm{LCR}}} (s) = \frac{{Y_{{\rm{LCR}}} (s)}}{{X(s)}} = \frac{{R\omega _{\rm{o}} s}}{{\omega _{\rm{o}} ^{\rm{2}} + R\omega _{\rm{o}} s + s^{\rm{2}} }} \\ &T_{\rm{D}} = T_{\rm{I}} = T_{\rm{o}}, {\rm{ }}\omega _{\rm{o}} = \frac{{\rm{1}}}{{T_{\rm{o}} }} \\ \end{split} \end{eqnarray} $
(11) 式中, W $_{\textrm{LCR}}$ (s), Y $_{\textrm{LCR}}$ (s), X(s) 为Laplace形式的传递函数、输出信号、输入信号. T $_{\textrm{D}}$ 为电感 $L$ 的微分常数, 单位s. T $_{\textrm{I}}$ 为电容 $C$ 的积分常数, 单位s. ${R}$ 为电阻, 单位 $\Omega$ . $\omega_{\textrm{o}}$ 为点频率, 单位rad/s.
点频滤波器重构原理:令LCR滤波器R→0, 可得到点频滤波器.如式 (12):
$ \begin{eqnarray} \begin{split} \mathop {W_{{\rm{LCR}}} {\rm{(}}s{\rm{)}}}\limits_{R \to {\rm{0}}} = \frac{{R\omega _{\rm{o}} s}}{{s^{\rm{2}} + \omega _{\rm{o}} ^2 }} = W_{\rm{O}} {\rm{(}}s{\rm{)}} \\ \end{split} \end{eqnarray} $
(12) 式中, W $_{\textrm{O}}$ (s) 为点频滤波器的传递函数.由于实际R不能趋于零, 在R取有限小值的情况下, 如R=0.0001 $\Omega$ , 则在有限的时间内, LCR滤波器可近似为点频滤波器[18].
3.2 激励方式转换环节
阶跃激励响应的点频滤波信号, 与正弦激励响应之间是一个R比值的关系.因此, 用 $\omega_{\textrm{o}}$ 取代 $\omega_{\textrm{s}}$ , 同时将点频滤波信号除以R, 则可实现阶跃激励到正弦激励方式的完全转换, 如图 6所示.
3.3 激励方式转换的频率特性
点频滤波在频域的幅频特性函数, 如式 (13):
$ \begin{eqnarray} \begin{split} G_{\rm{o}} {\rm{(}}\omega {\rm{)}} = \frac{R}{{\sqrt {\left(\displaystyle\frac{{\omega _{\rm{o}} }}{\omega } - \displaystyle\frac{\omega }{{\omega _{\rm{o}} }}\right)^2 + R^2 } }} \end{split} \end{eqnarray} $
(13) 式中, G $_{\textrm{o}}(\omega)$ 为点频滤波的频域幅频增益, 无量纲.
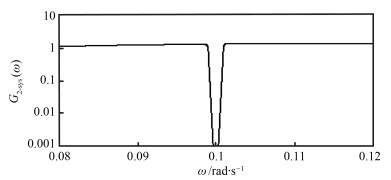
将G $_{\textrm{o}}(\omega)$ 除R, 其中在 $\omega_{\textrm{o}}$ =0.1 rad/s, R=0.0001 $\Omega$ , 得到激励方式转换环节的频域幅频特性, 图 7所示.
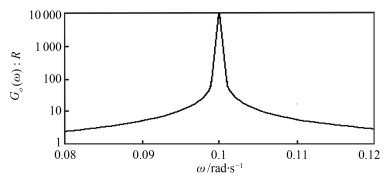 图 7 激励方式转换频域幅频特性示意图Fig. 7 Amplitude frequency characteristics diagram of incentive method conversion
图 7 激励方式转换频域幅频特性示意图Fig. 7 Amplitude frequency characteristics diagram of incentive method conversion图 7可见, 激励方式转换环节在频域的谐振峰值极高.
3.4 频域谐振峰抑制
文中新型正弦跟踪滤波器的重要作用还在于:对激励方式转换环节在频域的谐振峰进行抑制.省略推导过程, 用单位正弦信号直接激励新型正弦跟踪滤波器, 得到的信号, 为式 (14):
$ \begin{eqnarray} \begin{split} &Y_{{\textrm{sin-NSTF}}} (t) = {\rm{sin(}}\omega t{\rm{)}} - Y_{{\textrm{sin-NST}}} (t) = \\ &~~~~~{\rm{sin(}}\omega t{\rm{)}} - \frac{{2\sin {\Big{[}}\frac{{(\omega-\omega _{\rm{o}} )T_{\rm{w}} }}{2}{\Big{]}}}}{{(\omega - \omega _{\rm{o}} )T_{\rm{w}} }}{\rm{sin\Bigg[}}\omega t + \frac{{(\omega-\omega _{\rm{o}} )T_{\rm{w}} }}{2}{\Bigg{]}} \\ \end{split} \end{eqnarray} $
(14) 式中, $Y_{\textrm{sin-NSTF}}(t)$ 为单位正弦信号直接激励下的新型正弦跟踪滤波信号, $Y_{\textrm{sin-NST}}(t)$ 为单位正弦信号直接激励下的新型正弦跟踪信号.
根据式 (14), 得到新型正弦跟踪滤波器的频域幅频特性函数为式 (15):
$ \begin{eqnarray} \begin{split} &G_{{\rm{NSTF}}} (\omega ) = \sqrt {G_{\rm{r}} (\omega )^{\rm{2}} + G_{\rm{i}} (\omega )^{\rm{2}} } \\ &G_{\rm{r}} (\omega ) = {\rm{1}} - \frac{{2\sin \Big[\displaystyle\frac{{(\omega- \omega _{\rm{o}} )T_{\rm{w}} }}{2}\Big]{\rm{cos \Big[}}\displaystyle\frac{{(\omega-\omega _{\rm{o}} )T_{\rm{w}} }}{2}{\Big{]}}}}{{(\omega - \omega _{\rm{o}} )T_{\rm{w}} }} \\ &G_{\rm{i}} (\omega ) = \frac{{2\sin \Big[\displaystyle\frac{{(\omega-\omega _{\rm{o}} )T_{\rm{w}} }}{2}\Big]^{\rm{2}} }}{{(\omega - \omega _{\rm{o}} )T_{\rm{w}} }} \\ \end{split} \end{eqnarray} $
(15) 式中, G $_{\textrm{NSTF}}(\omega)$ 为新型正弦跟踪滤波器的频域幅值增益, 无量纲. G $_{\textrm{r}}(\omega)$ 为实频增益项, G $_{\textrm{i}}(\omega)$ 为虚频增益项.当 $\omega_{\textrm{o}}$ =0.1 rad/s, T $_{\textrm{w}}$ =62.82 s, 得到新型正弦跟踪滤波器的频域幅频特性, 图 8所示.
 图 8 新型正弦跟踪滤波器频域幅频特性示意图Fig. 8 Amplitude frequency characteristics of a new type sinusoid tracking filter
图 8 新型正弦跟踪滤波器频域幅频特性示意图Fig. 8 Amplitude frequency characteristics of a new type sinusoid tracking filter二级系统 (从激励方式转换环节的输入到新型正弦跟踪滤波器的输出) 的频域幅频特性函数为式 (16):
$ \begin{eqnarray} \begin{split} G_{{\textrm{2-sys}}} {\rm{(}}\omega {\rm{)}} = \frac{{G_{\rm{o}} {\rm{(}}\omega {\rm{)}}G_{{\rm{NSTF}}} {\rm{(}}\omega {\rm{)}}}}{R} \end{split} \end{eqnarray} $
(16) 式中, G $_{\textrm{2-sys}}(\omega)$ 为二级系统的频域幅频增益, 无量纲.在 $\omega_{\textrm{o}}$ =0.1 rad/s, R=0.0001 $\Omega$ , T $_{\textrm{w}}$ =62.82 s, 得到二级系统的频域幅频特性, 如图 9所示.
4. 新型微分器结构
将激励方式转换环节、新型正弦跟踪滤波器环节、除法运算环节串级组合, 则构成了新型微分器, 如图 10所示.
图 9所示, 新型正弦跟踪滤波器较好抑制了激励方式转换环节在频域的谐振峰, 图中G $_{\textrm{2-sys}}(\omega)$ 的峰值约为1.6.
图 10中, 除法运算环节的目的在于恢复微分信号的幅值.用 $Y_{\textrm{2}}(t)$ 激励新型微分器, 得到新型微分信号, 如式 (17):
$ \begin{eqnarray} \begin{split} Y_{{\textrm{d2-new}}} (t) = \frac{{Y_{{\textrm{2-NSTF}}} (t)}}{{G{\rm{(}}\omega _{\rm{s}} {\rm{)}}}} \approx Y_{{\rm{d2}}}(t) \end{split} \end{eqnarray} $
(17) 式中, $Y_{\textrm{d2-new}}(t)$ 为 $Y_{\textrm{2}}(t)$ 激励下的新型微分信号, $Y_{\textrm{2-NSTF}}$ (t) 为Y $_{\textrm{2}}$ (t) 激励下的新型正弦跟踪滤波信号.
同样用Y $_{\textrm{d4-new}}$ (t) 表达Y $_{\textrm{4}}$ (t) 激励下的新型微分信号等.
5. 新型微分器仿真实验
仿真实验的数值计算由数字计算机完成, 文中无特别说明, 数值计算的间隔为1 s.
在新型微分器的参数设置上, 一般说, 在 $\omega_{\textrm{o}}\geq 10\omega_{-\textrm{3dB}}$ 和R $\leq$ 0.0001 $\Omega$ 时, 新型微分信号与理想微分信号相比的近似度已经比较满意了.
5.1 新型微分特性的对比仿真实验
用Y $_{\textrm{4}}$ (t) 和Y $_{\textrm{2}}$ (t) 分别激励新型微分器, 将新型微分信号Y $_{\textrm{d4-new}}$ (t) 和Y $_{\textrm{d2-new}}$ (t) 分别与理想微分信号Y $_{\textrm{d4}}$ (t) 和Y $_{\textrm{d2}}$ (t) 进行对比. "理想微分信号"具体根据理想微分信号的函数式直接绘图给出.在T $_{\alpha}$ =100 s, $\omega_{\textrm{o}}$ =10 $\omega_{-\textrm{3dB}}$ , R=0.0001 $\Omega$ , 得到的对比结果, 如图 11和图 12所示.
 图 11 四阶微分信号对比仿真实验结果示意图Fig. 11 Comparison of simulation results and 4th order differential signal
图 11 四阶微分信号对比仿真实验结果示意图Fig. 11 Comparison of simulation results and 4th order differential signal 图 12 二阶微分信号对比仿真实验结果示意图Fig. 12 Comparison of simulation results and 2th order differential signal
图 12 二阶微分信号对比仿真实验结果示意图Fig. 12 Comparison of simulation results and 2th order differential signal图 11所示, Y $_{\textrm{d4-new}}$ (t) 与Y $_{\textrm{d4}}$ (t) 基本相同.
图 12所示, Y $_{\textrm{d2-new}}$ (t) 与Y $_{\textrm{d2}}$ (t) 的近似度较高, 在过程时间100 s以后基本相同.
5.2 新型微分器的抗白噪声干扰仿真实验
在实验上, 一般通过白噪声加扰来考查系统的抗干扰特性.抗噪声干扰的仿真实验结果表明, 新型微分器或传统近似理想微分器的抗噪声干扰特性, 除了与噪声强度有关外, 还与对象的惯性常数、信号的数值计算间隔等密切相关.
在 $\omega_{\textrm{o}}$ =0.1 rad/s, R=0.0001 $\Omega$ , 白噪声相对均值0.01, 仿真实验得到的结果, 如图 13和图 14所示.
 图 14 传统微分运算抗白噪声干扰实验结果 (意图 2)Fig. 14 Resistance to white noise of traditional differential operation (NO. 2)
图 14 传统微分运算抗白噪声干扰实验结果 (意图 2)Fig. 14 Resistance to white noise of traditional differential operation (NO. 2)比较图 13、图 14实验结果可看出, 新型微分器具有良好的抗白噪声干扰特性, 传统近似理想微分器的抗白噪声干扰特性较差.图中Y $_{n\textrm{-new}}$ (t) 为新型微分器的干扰输出, Y $_{n}$ (t) 为传统近似理想微分器的干扰输出.
另外, 在数值计算间隔0.1 s, 仿真实验得到的结果, 如图 15和图 16所示.
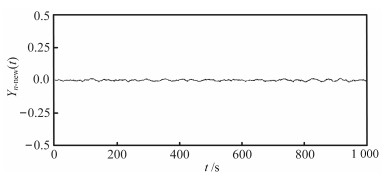 图 15 新方法抗白噪声干扰实验结果示 (意图 3)Fig. 15 Resistance to white noise of the new method (NO. 3)
图 15 新方法抗白噪声干扰实验结果示 (意图 3)Fig. 15 Resistance to white noise of the new method (NO. 3)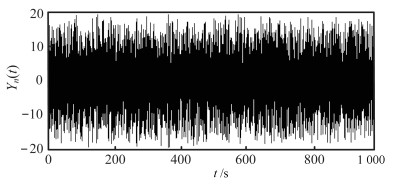 图 16 传统微分运算抗白噪声干扰实验结果 (意图 4)Fig. 16 Resistance to white noise of traditional differential operation (NO. 4)
图 16 传统微分运算抗白噪声干扰实验结果 (意图 4)Fig. 16 Resistance to white noise of traditional differential operation (NO. 4)比较图 15和图 16实验结果可看出, 数值计算间隔越小, 新型微分器的抗干扰性也越好, 传统近似理想微分器的抗噪声干扰性则越差.
6. 新型微分器与跟踪微分器的区别
在控制工程实践中, 获取微分信号的经典方法之一, 如图 17所示.
图 17所示, 其微分信号是用尽快地跟踪输入信号的办法得到的[8], 简称为跟踪微分器.
6.1 二阶跟踪微分器
如果图 17中的过程信号跟踪器为二阶 (低通滤波器) 系统, 称之为二阶跟踪微分器, 如式 (18):
$ \begin{eqnarray} \begin{split} W_{{\rm{d2}}} (s) = &1 - \frac{{r^{\rm{2}} }}{{s^{\rm{2}} + {\rm{2}}\xi rs + r^{\rm{2}} }} = \\ &\frac{{s^{\rm{2}} + {\rm{2}}\xi rs}}{{s^{\rm{2}} + {\rm{2}}\xi rs + r^{\rm{2}} }} \\ \end{split} \end{eqnarray} $
(18) 式中, W $_{\textrm{d2}}$ (s) 为二阶跟踪微分器的传递函数.为了直观地认识问题, 将式 (18) 转换为电工学中的LCR (L为电感, C为电容, R为电阻) 参数表达形式, 见式 (19):
$ \begin{eqnarray} \begin{split} W_{{\rm{D2}}} (s) = \frac{{s^{\rm{2}} + R\omega _{\rm{o}} s}}{{s^{\rm{2}} + R\omega _{\rm{o}} s + \omega _{\rm{o}} ^{\rm{2}} }} \end{split} \end{eqnarray} $
(19) 式中, W $_{\textrm{D2}}$ (s) 为LCR参数的二阶跟踪微分器的传递函数.
6.2 二阶跟踪微分器结构变形
为了对二阶跟踪微分器的本质有所认识, 对该微分器的结构进行变形处理.式 (19) 函数式的变形式为式 (20):
$ \begin{eqnarray} \begin{split} &W_{{\rm{D2}}} (s) = {\rm{[}}W_{{\rm{sin}}} {\rm{(}}s{\rm{)}} + W_{{\rm{cos}}} {\rm{(}}s{\rm{)][1}}-W_{{\textrm{LCR-ST}}} {\rm{(}}s{\rm{)]}} \\ &W_{{\rm{sin}}} {\rm{(}}s{\rm{)}} = \frac{{R\omega _{\rm{o}} s}}{{\omega _{\rm{o}} ^{\rm{2}} + s^{\rm{2}} }}, ~{\rm{ }}W_{{\rm{cos}}} {\rm{(}}s{\rm{)}} = \frac{{s^{\rm{2}} }}{{\omega _{\rm{o}} ^{\rm{2}} + s^{\rm{2}} }} \\ &W_{{\rm{LCR-ST}}} {\rm{(}}s{\rm{)}} = \frac{{R\omega _{\rm{o}} s}}{{\omega _{\rm{o}} ^{\rm{2}} + R\omega _{\rm{o}} s + s^{\rm{2}} }} \\ \end{split} \end{eqnarray} $
(20) 式中, W $_{\textrm{sin}}$ (s) 为正弦激励转换器传递函数, W $_{\textrm{cos}}$ (s) 为余弦激励转换器传递函数. W $_{\textrm{LCR-ST}}$ (s) 为LCR正弦跟踪器传递函数.正弦激励转换器和余弦激励转换器是一种理想点频滤波器.二阶跟踪微分器的变形结构, 如图 18所示.
 图 18 二阶跟踪微分器变形结构示意图Fig. 18 The deformation structure diagram of 2nd order tracking differentiator
图 18 二阶跟踪微分器变形结构示意图Fig. 18 The deformation structure diagram of 2nd order tracking differentiator6.3 二阶跟踪微分器信号分析
变形结构揭示了二阶跟踪微分器的本质, 一种正弦激励转换器和余弦激励转换器加LCR正弦跟踪器的结构.其中的LCR正弦跟踪器是LCR带通滤波器的本身.
以Y $_{\textrm{2}}$ (t) 激励为例, 在 $\omega_{\textrm{o}}$ =10 $\omega_{\rm{-3dB}}$ , R=2 $\Omega$ , 以Y $_{\textrm{d2}}$ (t) 的幅值为基准, 得到信号成分构成的相对比例, 见表 3.
表 3 相对比例3Table 3 Relative proportion of 3信号 Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 正弦激励转换器 0.1979 0.00391 0.0197 余弦激励转换器 -0.0099 0.0097 0.0099 加法器合成信号 0.1880 0.01361 0.02204 相对比率 1.0 0.07239 0.1172 表 3可见, 加法器合成信号构成以Y $_{\textrm{d2}}$ (t) 成分为主.
6.4 二阶跟踪微分器问题分析
表 3可见, 余弦激励转换器对提取Y $_{\textrm{d2}}$ (t) 的"作用"并不大, 而且该转换器的高频增益较高, 在干扰环境下的干扰输出较大.
另外, 实验结果表明, LCR正弦跟踪器对输入微分信号的抑制特性不理想.其中在T $_{\alpha}$ =100 s, $\omega_{\textrm{o}}$ =10 $\omega_{-\textrm{3dB}}$ , R=2 $\Omega$ , 在Y $_{\textrm{d2}}$ (t) 的直接激励下, 得到的实验结果, 图 4所示.相对新型正弦跟踪器, LCR正弦跟踪器对Y $_{\textrm{d2}}$ (t) 的抑制特性较差, 是造成二阶跟踪微分器滞后问题的基本内在原因.
6.5 新型微分器与跟踪微分器的相同地方
通过对二阶跟踪微分器变形结构的分析, 引出了一种正弦跟踪微分器 (Sinusoid tracking differentiator, STD) 的概念.二阶跟踪微分器是一种内在的正弦跟踪微分器, 而新型微分器则是一种外在的正弦跟踪微分器.
6.6 新型微分器与跟踪微分器的本质区别
两者本质区别在于正弦跟踪器结构的不相同.在二阶跟踪微分器变形结构中, 由于LCR正弦跟踪器特性的不理想, 这就决定了该微分器对R下限有严格限制, 通常合适的范围在 $1\sim2 \Omega$ 之间.
如果使变形结构中的余弦激励转换器的作用为零, 则可有效提高抗干扰特性, 实质上构成了"LCR微分器", 是二阶跟踪微分器的一种特殊形式.
6.7 输出微分特性对比
以提取Y $_{\textrm{2}}$ (t) 的微分信号为例, 用Y $_{\textrm{d2-LCR}}$ (t) 表达Y $_{\textrm{2}}$ (t) 激励下的LCR微分信号.在 $\omega_{\textrm{o}}$ =0.1 rad/s, 仿真实验的结果, 如图 19所示.
图 19所示, Y $_{\textrm{d2-new}}$ (t) 的特性较好, 与Y $_{\textrm{d2}}$ (t) 的近似度较高.而Y $_{\textrm{d2-LCR}}$ (t) 的特性相对滞后, 与Y $_{\textrm{d2}}$ (t) 的特性相对偏离.
7. 实际应用
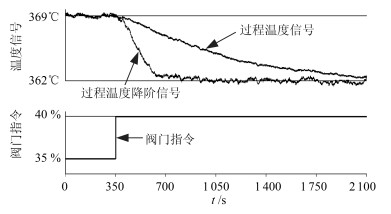
将文中新型微分器用于某热电厂高压供热系统的温度调节.该系统设计额定参数为:蒸汽压力3.95 MPa, 蒸汽温度365 ℃, 蒸汽负荷395 t/h.但实际负荷长期在25 t/h以下, 负荷变化范围在 $5\sim25$ t/h之间, 实际汽温调节品质较差.通过现场测试, 得到该系统近似数学模型为式 (21):
$ \begin{eqnarray} \begin{split} &W_{{\rm{5}}.{\rm{5}}} {\rm{(}}s{\rm{)}} = \frac{{{\rm{3}}{\rm{.58}}}}{{{\rm{1}} + {\rm{2280}}s}}{\rm{e}}^{ - {\rm{25}}s} \\ &W_{{\rm{20}}} {\rm{(}}s{\rm{)}} = \frac{{{\rm{0}}{\rm{.96}}}}{{{\rm{1}} + {\rm{596}}s}}{\rm{e}}^{ - {\rm{8}}s} \\ \end{split} \end{eqnarray} $
(21) 式中, W $_{\textrm{5.5}}$ (s) 为负荷在5.5 t/h时的数学模型, W $_{\textrm{20}}$ (s) 为负荷在20 t/h时的数学模型, 单位℃/%.
将文中新型微分器具体用于所述系统过程温度信号的降阶处理, 如图 20所示.
图 20所示, 根据现场实验结果, 整理出数学模型惯性常数与蒸汽流量之间的函数关系, 实际运行中通过蒸汽流量获取数学模型惯性常数.其中, 在新型微分器中, 点频滤波函数表达为式 (22):
$ \begin{eqnarray} \begin{split} W_{\rm{L}} {\rm{(}}s{\rm{)}} = \displaystyle\frac{{{\rm{0}}.{\rm{0001}}\displaystyle\frac{{{\rm{10}}}}{{T_{\rm m} }}s}}{{s^{\rm{2}} + {\rm{0}}.{\rm{0001}}\displaystyle\frac{{{\rm{10}}}}{{T_{\rm m} }}s + \left(\displaystyle\frac{{{\rm{10}}}}{{T_{\rm m} }}\right)^2 }} \end{split} \end{eqnarray} $
(22) 式中, W $_{\textrm{L}}$ (s) 为点频滤波的传递函数, T $_\textrm{m}$ 代表数学模型惯性常数, 单位s.数字10代表 $\omega_{\textrm{o}}$ =10 $\omega_{\rm{-3dB}}$ , 0.0001代表R=0.0001 $\Omega$ .其中在蒸汽负荷10 t/h, 进行开环阶跃激励实验, 得到的实验结果, 如图 21所示.
图 21所示, 从相对过程时间350 s开始, 旁路调节阀由35 %开到40 %以后, 过程温度由369 ℃逐步下降到362 ℃, 过程温度的降阶信号有较大的超前, 降阶信号的波动幅度不大.
8. 结论
在一定的条件下, 可通过对象的正弦激励响应获取对象阶跃激励响应的微分信号.对于二阶微分器, 理论上, 输出微分信号的特性主要是由对象的正弦激励响应包括余弦激励响应的特性所决定的, 与采用何种跟踪微分器方法并无直接关系.变形结构揭示了二阶跟踪微分器的本质, 一种内在的正弦跟踪微分器.相对而言, 新型微分器则是一种外在的正弦跟踪微分器.新型微分器通过一种点频滤波器, 实现了阶跃激励到正弦激励的转换, 其次是通过一种特性较好的新型正弦跟踪滤波器, 有效提高了输出微分信号的质量.新型微分器较好克服了经典微分器的缺陷, 具有良好的抗噪声干扰特性, 良好的理论意义和重要的实际应用价值.数学分析、仿真实验和实际应用结果, 验证了新方法的正确性和有效性.
-
图 4 新型正弦跟踪器的二阶微分激励特性示意图
Fig. 4 The 2nd order differential excitation response of a new type sinusoid tracker
图 7 激励方式转换频域幅频特性示意图
Fig. 7 Amplitude frequency characteristics diagram of incentive method conversion
图 8 新型正弦跟踪滤波器频域幅频特性示意图
Fig. 8 Amplitude frequency characteristics of a new type sinusoid tracking filter
图 11 四阶微分信号对比仿真实验结果示意图
Fig. 11 Comparison of simulation results and 4th order differential signal
图 12 二阶微分信号对比仿真实验结果示意图
Fig. 12 Comparison of simulation results and 2th order differential signal
图 14 传统微分运算抗白噪声干扰实验结果 (意图 2)
Fig. 14 Resistance to white noise of traditional differential operation (NO. 2)
图 15 新方法抗白噪声干扰实验结果示 (意图 3)
Fig. 15 Resistance to white noise of the new method (NO. 3)
图 16 传统微分运算抗白噪声干扰实验结果 (意图 4)
Fig. 16 Resistance to white noise of traditional differential operation (NO. 4)
图 18 二阶跟踪微分器变形结构示意图
Fig. 18 The deformation structure diagram of 2nd order tracking differentiator
表 1 相对比例1
Table 1 Relative proportion of 1
成分 Y $_{\textrm{d4}}$ (t) Y $_{\textrm{d3}}$ (t) Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 相对比例 1.0 0.0198 -0.0095 -0.00038 0.00098  下载: 导出CSV
下载: 导出CSV
表 2 相对比例2
Table 2 Relative proportion of 2
成分 Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 相对比例 1.0 0.0198 0.0995
下载: 导出CSV
表 3 相对比例3
Table 3 Relative proportion of 3
信号 Y $_{\textrm{d2}}$ (t) Y $_{\textrm{d1}}$ (t) 稳态正弦 正弦激励转换器 0.1979 0.00391 0.0197 余弦激励转换器 -0.0099 0.0097 0.0099 加法器合成信号 0.1880 0.01361 0.02204 相对比率 1.0 0.07239 0.1172
下载: 导出CSV
-
[1] 魏萍, 丁卯, 左信, 罗雄麟.基于微分方程对称的分布参数系统稳态控制.自动化学报, 2014, 40(10): 2163-2170 http://www.aas.net.cn/CN/abstract/abstract18491.shtmlWei Ping, Ding Mao, Zuo Xin, Luo Xiong-Lin. Steady-state control for distributed parameter systems by symmetry of differential equations. Acta Automatica Sinica, 2014, 40(10): 2163-2170 http://www.aas.net.cn/CN/abstract/abstract18491.shtml [2] 谭拂晓, 刘德荣, 关新平, 罗斌.基于微分对策理论的非线性控制回顾与展望.自动化学报, 2014, 40(1): 1-15 http://www.aas.net.cn/CN/abstract/abstract18261.shtmlTan Fu-Xiao, Liu De-Rong, Guan Xin-Ping, Luo Bin. Review and perspective of nonlinear systems control based on differential games. Acta Automatica Sinica, 2014, 40(1): 1-15 http://www.aas.net.cn/CN/abstract/abstract18261.shtml [3] Freidovich L B, Khalil H K. Performance recovery of feedback-linearization-based designs. IEEE Transactions on Automatic Control, 2008, 53(10): 2324-2334 https://www.researchgate.net/publication/224347247_Performance_Recovery_of_Feedback-Linearization-Based_Designs [4] Atassi A N, Khalil H K. Separation results for the stabilization of nonlinear systems using different high-gain observer designs. Systems & Control Letters, 2000, 39(3): 183-191 https://www.researchgate.net/publication/222062167_Separation_Results_for_the_Stabilization_of_Nonlinear_Systems_Using_Different_High-Gain_Observer_Designs [5] 刘希, 孙秀霞, 郝震, 刘宇坤.最速跟踪微分器的一种新型离散形式.信息与控制, 2013, 42(6): 729-734 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201306011.htmLiu Xi, Sun Xiu-Xia, Hao Zhen, Liu Yu-Kun. A new discrete-time form of optimal tracking differentiator. Information and Control, 2013, 42(6): 729-734 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201306011.htm [6] Guo B Z, Han J Q, Xi F B. Linear tracking-differentiator and application to online estimation of the frequency of a sinusoidal signal with random noise perturbation. International Journal of Systems Science, 2002, 33(5): 351-358 doi: 10.1080/00207720210121771 [7] 李军, 万文军, 张曦.基于非线性滤波环节的新型鲁棒PID控制策略的研究.动力工程学报, 2013, 33(2): 117-122 http://www.cnki.com.cn/Article/CJFDTOTAL-DONG201302009.htmLi Jun, Wan Wen-Jun, Zhang Xi. Study on novel robust PID control strategy based on non-linear filtering. Journal of Chinese Society of Power Engineering, 2013, 33(2): 117-122 http://www.cnki.com.cn/Article/CJFDTOTAL-DONG201302009.htm [8] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术.北京:国防工业出版社, 2008.Han Jing-Qing. Active Disturbance Rejection Control Technique: the Technique for Estimating and Compensating the Uncertainties. Beijing: National Denfence Industry Press, 2008. [9] Guo B Z, Zhao Z L. On convergence of tracking differentiator. International Journal of Control, 2011, 84(4): 693-701 doi: 10.1080/00207179.2011.569954 [10] 李向阳.基于有限时间跟踪微分器的迭代学习控制.自动化学报, 2014, 40(7): 1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtmlLi Xiang-Yang. Iterative learning control based on finite time tracking differentiator. Acta Automatica Sinica, 2014, 40(7): 1366-1375 http://www.aas.net.cn/CN/abstract/abstract18408.shtml [11] Guo B Z, Zhao Z L. On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM Journal on Control and Optimization, 2013, 51(2): 1727-1757 https://www.researchgate.net/publication/263932930_On_Convergence_of_the_Nonlinear_Active_Disturbance_Rejection_Control_for_MIMO_Systems [12] Jiang T T, Huang C D, Guo L. Control of uncertain nonlinear systems based on observers and estimators. Automatica, 2015, 59: 35-47 doi: 10.1016/j.automatica.2015.06.012 [13] Ran M P, Wang Q, Dong C Y. Stabilization of a class of nonlinear systems with actuator saturation via active disturbance rejection control. Automatica, 2016, 63: 302-310 doi: 10.1016/j.automatica.2015.10.010 [14] 程春华, 胡云安, 吴进华.非仿射纯反馈非线性系统的自抗扰控制.自动化学报, 2014, 40(7): 1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtmlCheng Chun-Hua, Hu Yun-An, Wu Jin-Hua. Auto disturbance controller of non-affine nonlinear pure feedback systems. Acta Automatica Sinica, 2014, 40(7): 1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtml [15] 李杰, 齐晓慧, 夏元清, 高志强.线性/非线性自抗扰切换控制方法研究.自动化学报, 2016, 42(2): 202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtmlLi Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42(2): 202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtml [16] 高志强.自抗扰控制思想探究.控制理论与应用, 2013, 30(12): 1498-1510 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201312006.htmGao Zhi-Qiang. On the foundation of active disturbance rejection control. Control Theory & Applications, 2013, 30(12): 1498-1510 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201312006.htm [17] 杨光达, 周游.非线性跟踪微分器稳态性能分析及仿真研究.光电技术应用, 2010, 25(5): 80-82 http://www.cnki.com.cn/Article/CJFDTOTAL-GDYG201005025.htmYang Guang-Da, Zhou You. Analysis and simulation of steady-state performance in nonlinear tracking-differentiator. Electro-Optic Technology Application, 2010, 25(5): 80-82 http://www.cnki.com.cn/Article/CJFDTOTAL-GDYG201005025.htm [18] 李军, 万文军, 刘志刚, 陈世和, 张曦.一种基于时域响应的控制系统频率特性分析方法.中国电机工程学报, 2012, 32(29): 116-122 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201229018.htmLi Jun, Wan Wen-Jun, Liu Zhi-Gang, Chen Shi-He, Zhang Xi. A method of frequency domain analysis for control systems based on process response in time domain. Proceedings of the CSEE, 2012, 32(29): 116-122 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201229018.htm [19] 李军, 万文军.一种基于序列零初相位调制的新型正弦信号频率测量方法.自动化学报, 2016, 42(10): 1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtmlLi Jun, Wan Wen-Jun. A novel sinusoidal frequency measurement method based on modulation of sequence with zero initial phase. Acta Automatica Sinica, 2016, 42(10): 1585-1594 http://www.aas.net.cn/CN/abstract/abstract18945.shtml 期刊类型引用(7)
1. 李军,黄卫剑,万文军,刘哲. 一种新型反馈控制器的研究与应用. 控制理论与应用. 2020(02): 411-422 .  百度学术
百度学术2. 李军,刘哲,周永言. 一种新型高性能控制器的研究与应用. 自动化学报. 2020(12): 2558-2571 . 本站查看3. 李军,万文军,刘哲. 一种二阶内反馈控制器SO-IFC的研究与应用. 自动化学报. 2019(05): 993-1003 . 本站查看4. 杨峰,郑丽涛,王家琦,潘泉. 双层无迹卡尔曼滤波. 自动化学报. 2019(07): 1386-1391 . 本站查看5. 李军,黄卫剑,万文军,朱亚清,潘凤萍. 一种新型抗扰控制方法的研究与应用. 广东电力. 2018(03): 1-8 . 百度学术6. 李军,黄卫剑,万文军,朱亚清,朱晨亮,李洪. 一种高性能PID控制器的研究与工程应用. 广东电力. 2018(07): 42-48 . 百度学术7. 李军,陈世和,万文军,王越超,黄卫剑. 一种内反馈控制器IFC的研究与应用. 自动化学报. 2018(09): 1706-1716 . 本站查看其他类型引用(2)
-

 下载:
下载:






计量
- 文章访问数: 2887
- HTML全文浏览量: 477
- PDF下载量: 810
- 被引次数: 9
