

-
摘要: 主方向直方图(Histograms of dominant orientations,HDO)是一种简单但性能优良的局部图像描述子,但是,原有的HDO特征描述不具备旋转不变性.本文提出一种抗旋转变换HDO特征描述方法,在进行RGT(Radial gradient transform)变换后,采用圆形邻域计算给定位置的结构张量,使得求取的主方向和一致性特征分量具备一定的旋转不变性,最后为增强辨别能力,采用了多扇区划分空间池化操作.在公开的MIT人脸数据集中的测试结果显示,如果图片不旋转,本文方法准确率与传统的HDO算法基本持平,达到92.10%,但当样本图片旋转后,本文算法准确率比传统HDO算法高10.36%.此外,在行人数据集、合成的旋转手掌和旋转人脸识别实验中,本文方法的检测结果也明显优于传统的HDO算法.另外本文方法在53Objects、ZuBuD和Kentuky三个数据集上的识别性能也优于大部分现有抗旋转算子.Abstract: Histograms of dominant orientations (HDO) is a simple local image descriptor with fine performance. However, the original HDO feature description has no rotation invariance. This paper presents a rotation-invariant HDO feature description. To acquire the rotation invariant feature, i.e., dominant orientation and the coherent, by RGT (radial gradient transform), the structure tensor of given location is calculated in a circular neighborhood. Then, to enhance distinctiveness, space pooling operation is implemented with multi-sector division. Test results in public MIT faces data show that if the image does not rotate, the proposed method and the original HDO descriptor almost have the same accuracy (92.10%), while, if the image rotates, the accuracy of the improved HDO descriptor is higher than that of the original HDO by 10.36%. In addition, in the experiments of pedestrians, synthetic rotated palms and faces detections, our method is obviously superior to its original one. Moreover, the proposed method shows better recognition accuracy than most recent anti-rotation descriptors in public 53Objects, ZuBuD and Kentuky image datasets.
-
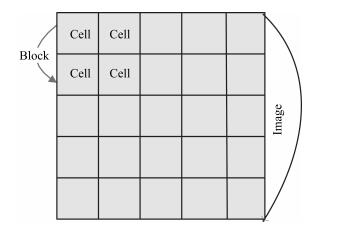
图 1 图像单元 (Cell)、图像块 (Block) 和原始图像 (Image) 的对应关系
Fig. 1 The diagram of cell, block and image

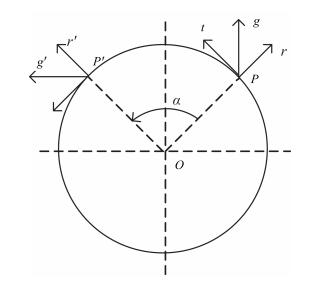
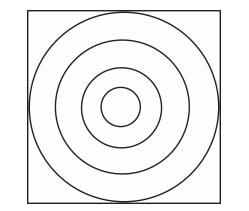
图 5 旋转后的方形邻域和圆形邻域示意图
Fig. 5 Schematic diagram of circular neighborhood and rectangular neighborhood after rotation

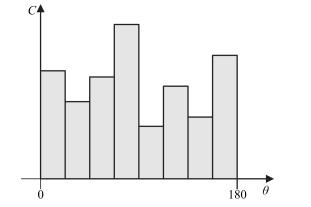
图 8 某测试图片旋转时的相关度计算示意图和相关度曲线
Fig. 8 Schematic diagram and curve of correlation calculation of example test image rotation

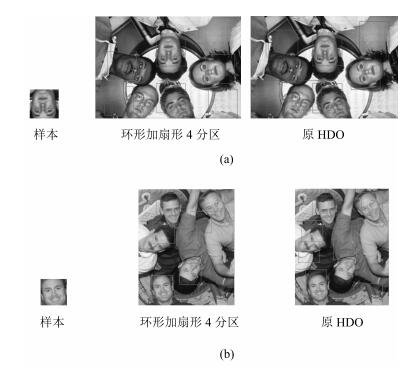
图 10 原HDO特征与改进HDO环形分区特征对人脸旋转图片检测结果
Fig. 10 Test result in rotation image of original HDO and improved HDO with annular division
表 1 图 9样本图片旋转的平均相关度计算值
Table 1 Fig. 9 sample average correlation calculation value of the image rotation
图片旋转角度 30 45 60 90 120 135 150 180 210 225 240 270 300 330 平均值 标准差 原HDO 0.47 0.28 0.46 0.95 0.44 0.30 0.42 0.97 0.46 0.28 0.44 0.96 0.44 0.44 0.52 0.2465 环形分区 0.78 0.88 0.75 0.88 0.77 0.81 0.77 0.83 0.77 0.84 0.84 0.86 0.75 0.79 0.81 0.0454 环形加扇形四分区 0.73 0.78 0.72 0.71 0.70 0.71 0.69 0.68 0.69 0.73 0.69 0.72 0.72 0.76 0.72 0.0279 环形加扇形八分区 0.68 0.70 0.62 0.59 0.62 0.62 0.62 0.61 0.60 0.63 0.59 0.60 0.64 0.72 0.63 0.0405  下载: 导出CSV
下载: 导出CSV
表 2 传统HDO和改进HDO人脸分类性能比较 (%)
Table 2 Classification performance comparison between original and improved HDO ({\%)
分类准确率 传统HDO 环形分区 4扇区环状空间划分 8扇区环状空间划分 16扇区环状空间划分 训练图片不旋转
测试图片不旋转92.36 81.72 92.11 93.74 93.82 训练图片不旋转
测试图片旋转64.65 71.18 74.98 75.96 76.18 训练图片旋转
测试图片旋转70.78 74.20 74.25 74.05 74.14
下载: 导出CSV
表 3 传统HDO和改进HDO行人分类性能比较 (%)
Table 3 Comparison of pedestrian classification perfor-mance between original HDO and improved HDO (%)
分类准确率 传统HDO 环形分区 4扇区环状空间划分 8扇区环状空间划分 16扇区环状空间划分 训练图片不旋转
测试图片不旋转85.00 85.67 84.33 89.33 91.33 训练图片不旋转
测试图片旋转68.67 69.00 70.00 72.67 74.67 训练图片旋转
测试图片旋转76.67 78.67 79.67 80.33 89.67
下载: 导出CSV
表 4 传统HDO和改进HDO手掌分类性能比较 (%)
Table 4 Comparison of palm classification performance between original HDO and improved HDO (%)
算法 传统HDO 环形分区 4扇区环状空间划分 8扇区环状空间划分 16扇区环状空间划分 分类准确率 74.63 78.86 80.07 80.33 83.36
下载: 导出CSV
表 5 图像分块大小分类性能比较 (%)
Table 5 The image block size comparison on the performances of classification (%)
分类准确率 划分方式 环形分区 4扇区环状空间划分 8扇区环状空间划分 16扇区环状空间划分 训练图片不旋转 AW = 1 71.18 74.98 75.96 76.94 测试图片旋转 AW = 2 70.68 74.81 74.78 75.48
下载: 导出CSV
表 6 特征提取时间
Table 6 Feature extraction time
特征描述子 传统HDO 环形分区 4扇区环状空间划分 8扇区环状空间划分 16扇区环状空间划分 特征维度 968 72 216 504 1 080 提取时间 (ms) 746.5 362.4 458.5 648.4 702.5
下载: 导出CSV
表 7 不同局部描述子在三种数据集上的识别率比较 (%)
Table 7 Comparison of different local descriptor in the recognition rate on the three data sets (%)
Descriptor RIFT SIFT DAISY MRRID MROGH HDO 4扇区环状空间划分HDO 53Objects Accuracy 37.0 52.2 61.2 57.4 72.5 56.6 68.2 ZuBuD Accuracy 66.8 75.5 83.1 78.6 88.1 72.7 83.6 Kentuky Accuracy 34.1 48.2 58.3 57.5 74.0 62.3 75.4
下载: 导出CSV
-
[1] Lowe D G. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60(2):91-110 doi: 10.1023/B:VISI.0000029664.99615.94 [2] Bay H, Tuytelaars T, Van Gool L. SURF:speeded up robust features. In:Proceedings of the 9th European Conference on Computer Vision. Graz, Austria:Springer-Verlag, 2006. 404-417 [3] Dalal N, Triggs B. Histograms of oriented gradients for human detection. In:Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco, USA:IEEE, 2005. 886-893 [4] Kim W, Yoo B, Han J J. HDO:a novel local image descriptor. In:Proceedings of the 2014 IEEE International Conference on Image Processing. Paris, France:IEEE, 2014, 5671-5675 [5] Fan B, Wu F C, Hu Z Y. Rotationally invariant descriptors using intensity order pooling. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(10):2031-2045 doi: 10.1109/TPAMI.2011.277 [6] Song K C, Yan Y H, Chen W H, Zhang X. Research and perspective on local binary pattern. Acta Automatica Sinica, 2013, 39(6):730-744 doi: 10.1016/S1874-1029(13)60051-8 [7] Guan W, You S Y. Robust image matching with line context. In:Proceedings of the 2013 British Machine Vision Conference. Bristol, UK:BMVA Press, 2013. 34.1-34.11 [8] Takacs G, Chandrasekhar V, Tsai S, Chen D, Grzeszczuk R, Girod B. Unified real-time tracking and recognition with rotation-invariant fast features. In:Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). San Francisco, CA, USA:IEEE, 2010. 934-941 [9] Chandrasekhar V, Takacs G, Chen D, Tsai S, Grzeszczuk R, Girod B. CHoG:compressed histogram of gradients a low bit-rate feature descriptor. In:Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami, FL, USA:IEEE, 2009. 2504-2511 [10] Ojala T, Pietikäinen M, Mäenpää T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7):971-987 doi: 10.1109/TPAMI.2002.1017623 [11] Wang Z H, Fan B, Wu F C. Local intensity order pattern for feature description. In:Proceedings of the 2011 International Conference on Computer Vision. Barcelona, Spain:IEEE, 2011. 603-610 [12] Zeng Z, Lammas A, Sammut K, He F P. Optimal path planning based on annular space decomposition for AUVs operating in a variable environment. In:Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV). Southampton, UK:IEEE, 2012. 1-9 [13] Sadat E S, Behrad A. Star tracking and attitude determination using fuzzy based positional pattern and rotation compensation in Fourier domain. Multimedia Systems, 2015, 21(4):401-410 doi: 10.1007/s00530-014-0365-1 [14] Nguyen T N, Miyata K. Multi-scale region perpendicular local binary pattern:an effective feature for interest region description. The Visual Computer, 2015, 31(4):391-406 doi: 10.1007/s00371-014-0934-5 [15] Lazebnik S, Schmid C, Ponce J. A sparse texture representation using local affine regions. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(8):1265-1278 doi: 10.1109/TPAMI.2005.151 [16] Tola E, Lepetit V, Fua P. A fast local descriptor for dense matching. In:Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK, USA:IEEE, 2008. 1-8 -

 下载:
下载:



计量
- 文章访问数: 2178
- HTML全文浏览量: 443
- PDF下载量: 656
- 被引次数: 0
