

Remaining Useful Life Estimation for Nonlinear Stochastic Degrading Systems with Uncertain Measurement and Unit-to-unit Variability
-
摘要: 剩余寿命估计是预测与健康管理的基础,是降低系统运行风险、提高系统安全性与可靠性的有效途径.针对工程实际中大量存在的非线性随机性退化系统,现有方法仅单独考虑了不确定测量或系统间个体差异对剩余寿命的影响,尚未实现同时考虑不确定测量和个体差异的剩余寿命估计.因此,本文首先建立了一种基于扩散过程的非线性退化模型,进一步通过建立的状态空间模型和Kalman滤波实现了同时考虑不确定测量和个体差异下的随机退化系统剩余寿命自适应估计,同时对漂移系数进行自适应估计,以获取非线性退化系统更加精确的剩余寿命估计.最后,将所提方法应用于疲劳裂纹和陀螺仪的监测数据,结果表明本文方法显著优于仅考虑不确定测量或仅考虑个体差异的寿命估计方法,具有潜在的工程应用价值.Abstract: Remaining useful life (RUL) estimation is essential for the prognostics and health management of systems, and is the effective path to mitigate system risk and improve the system safety and reliability. For the extensively encountered practical degradation systems with nonlinearity and stochasticity, the current methods to estimate RUL only consider uncertain measurement or unit-to-unit variability, but not both simultaneously. In this paper, a nonlinear degradation model is built based on a nonlinear diffusion degradation process to incorporate the uncertain measurement and unit-to-unit variability into the estimated RUL. By constructing a state-space model and applying Kalman filtering technique, an analytical form of the RUL distribution is derived. In addition, the RUL estimation and drift coefficient efficient can be adaptively updated with the available observations. Finally, two cases study for aluminium alloy in aircraft and gyros are provided to verify the presented method. The results illustrate that the presented method can generate better results than only considering uncertain measurement or unit-to-unit variability, and thus can be potentially applied in practice.
-
Key words:
- Nonlinear /
- uncertain measurement /
- unit-to-unit variability /
- remaining useful life (RUL) /
- estimation
1) 本文责任编委 钟麦英 -
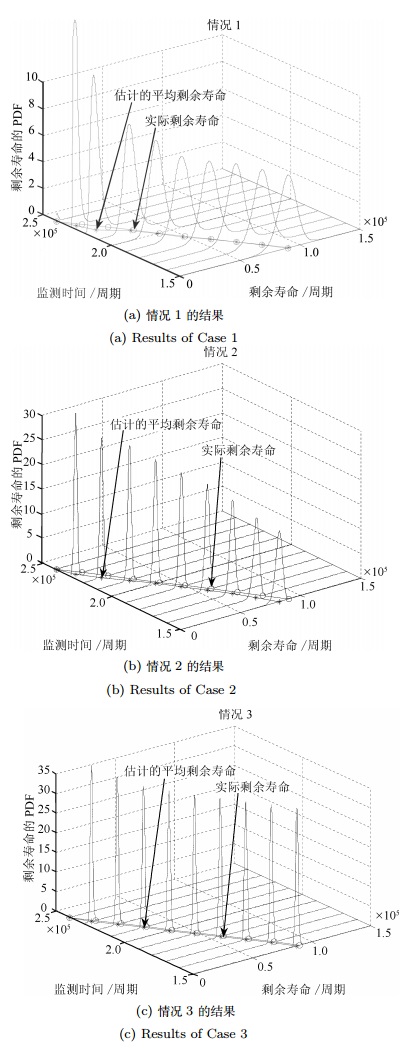
图 2 3种情况下基于疲劳裂纹数据的剩余寿命估计PDF和期望值的比较结果
Fig. 2 Comparisons of the PDFs and mean of the RULs for three cases with the fatigue crack data
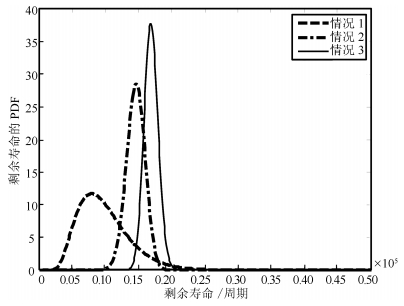
图 3 在第2.2 $\times$ 105周期监测点时3种情况下的剩余寿命PDF
Fig. 3 PDFs for the three cases at the 2.2 $\times$ 105 cycle
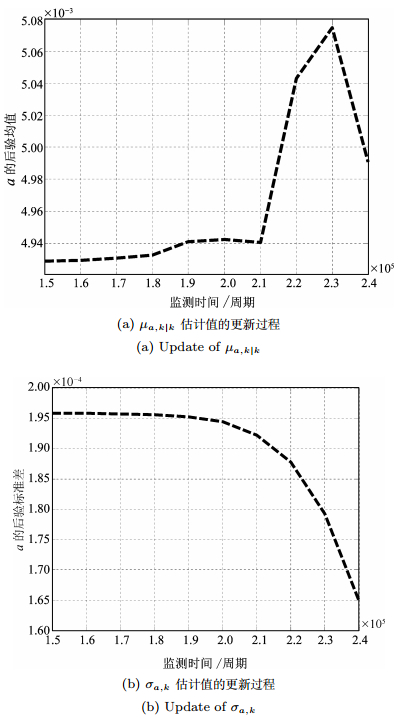
图 4 $\mu _{a, k|k}$和${\sigma _{a, k}}$基于第三组测量数据的更新
Fig. 4 Updates of $\mu _{a, k|k}$ and ${\sigma _{a, k}}$ based on the third set of data
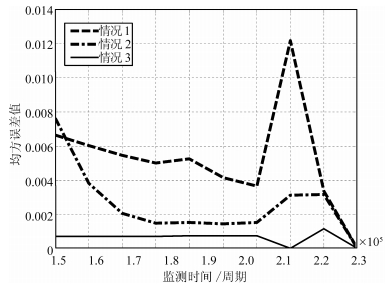
图 5 基于第三组裂纹数据的剩余寿命估计的MSE比较结果
Fig. 5 Comparisons for the MSE of the estimated remaining useful life based on the third set of data
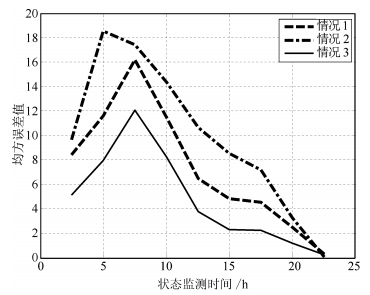
图 7 基于第四组陀螺漂移数据的剩余寿命估计的MSE比较结果
Fig. 7 Comparisons for the MSE of the estimated remaining useful life based on the fourth set of gyro data
表 1 3种情况下对疲劳裂纹的估计结果
Table 1 Comparisons of three degradation models with fatigue-crack growth data
$\mu _a$ $\sigma _a$ b ${\sigma _B}$ ${\sigma _\varepsilon }$ log-LF AIC TMSE 情况1 3.9477E-005 8.9347E-006 13.482 1.8977 - -43.1125 94.225 0.0518 情况2 4.9223E-005 - 13.3145 0.5346 0.4907 -37.4882 82.9764 0.0259 情况3 4.9E-003 1.9582E-004 8.1382 0.0114 0.5121 -28.9682 67.9364 0.0063  下载: 导出CSV
下载: 导出CSV
表 2 3种情况下各状态监测点疲劳裂纹的MSE值
Table 2 MSEs of fatigue-crack growth data condition monitoring points for the three cases
监测点($\times {10^5}$周期) 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 情况1 0.0067 0.0060 0.0055 0.0050 0.0053 0.0042 0.0036 0.0122 0.0034 情况2 0.8190 0.7444 0.6603 0.5667 0.4653 0.3655 0.2640 0.1459 0.0449 情况3 0.0076 0.0038 0.0021 0.0015 0.0015 0.0015 0.0015 0.0031 0.0032
下载: 导出CSV
表 3 3种情况下对陀螺仪的估计结果
Table 3 Comparisons of three degradation models with gyros
$\mu _a$ $\sigma _a$ b ${\sigma _B}$ ${\sigma _\varepsilon }$ log-LF AIC TMSE 情况1 6.6895E-021 6.1544E-021 14.8843 0.0668 - 27.6830 -47.3360 66.1468 情况2 1.4625E-013 - 13.3145 0.1563 0.0400 -2.3983 -3.2034 89.5732 情况3 5.2151E-026 4.8076E-026 18.6422 0.0646 0.0253 27.9339 -45.8780 42.8521
下载: 导出CSV
表 4 3种情况下各状态监测点陀螺仪的MSE值
Table 4 MSEs of gyros data condition monitoring points for the three cases
监测点(h) 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 情况1 8.3907 11.5918 16.1759 11.4570 6.4760 4.8352 4.5324 2.4438 情况2 9.6285 18.5416 17.4385 14.3918 10.6622 8.5542 7.1531 3.1990 情况3 5.0858 7.9371 12.0434 8.2163 3.7278 2.2491 2.2328 1.1327
下载: 导出CSV
-
[1] Pecht M G. Prognostics and Health Management of Electronics. New Jersey:John Wiley, 2008. [2] Sheppard J W, Kaufman M A, Wilmering T J. IEEE standards for prognostics and health management. IEEE Aerospace and Electronic Systems Magazine, 2009, 24(9):34-41 doi: 10.1109/MAES.2009.5282287 [3] 周东华, 魏慕恒, 司小胜.工业过程异常检测、寿命预测与维修决策的研究进展.自动化学报, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtmlZhou Dong-Hua, Wei Mu-Heng, Si Xiao-Sheng. A survey on anomaly detection, life prediction and maintenance decision for industrial processes. Acta Automatica Sinica, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtml [4] 李鑫, 吕琛, 王自力, 陶小创.考虑退化模式动态转移的健康状态自适应预测.自动化学报, 2014, 40(9):1889-1895 http://www.aas.net.cn/CN/abstract/abstract18458.shtmlLi Xin, Lv Chen, Wang Zi-Li, Tao Xiao-Chuang. Self-adaptive health condition prediction considering dynamic transfer of degradation mode. Acta Automatica Sinica, 2014, 40(9):1889-1895 http://www.aas.net.cn/CN/abstract/abstract18458.shtml [5] 胡友涛, 胡昌华, 孔祥玉, 周志杰.基于WSVR和FCM聚类的实时寿命预测方法.自动化学报, 2012, 38(3):331-340 doi: 10.3724/SP.J.1004.2012.00331Hu You-Tao, Hu Chang-Hua, Kong Xiang-Yu, Zhou Zhi-Jie. Real-time lifetime prediction method based on wavelet support vector regression and fuzzy C-means clustering. Acta Automatica Sinica, 2012, 38(3):331-340 doi: 10.3724/SP.J.1004.2012.00331 [6] 曾声奎, Pecht M G, 吴际.故障预测与健康管理(PHM) 技术的现状与发展.航空学报, 2005, 26(5):626-632 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200505017.htmZeng Sheng-Kui, Pecht M G, Wu Ji. Status and perspectives of prognostics and health management technologies. Acta Aeronautica Et Astronautica Sinica, 2005, 26(5):626-632 http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200505017.htm [7] Si X S, Wang W B, Hu C H, Zhou D H. Remaining useful life estimation-a review on the statistical data driven approaches. European Journal of Operational Research, 2011, 213(1):1-14 doi: 10.1016/j.ejor.2010.11.018 [8] Si X S. An adaptive prognostic approach via nonlinear degradation modeling:application to battery data. IEEE Transactions on Industrial Electronics, 2015, 62(8):5082-5096 doi: 10.1109/TIE.2015.2393840 [9] Si X S, Wang W B, Hu C H, Zhou D H, Pecht M G. Remaining useful life estimation based on a nonlinear diffusion degradation process. IEEE Transactions on Reliability, 2012, 61(1):50-67 doi: 10.1109/TR.2011.2182221 [10] Si X S, Wang W B, Hu C H, Zhou D H. Estimating remaining useful life with three-source variability in degradation modeling. IEEE Transactions on Reliability, 2014, 63(1):167-190 doi: 10.1109/TR.2014.2299151 [11] Vasan A S S, Long B, Pecht M. Diagnostics and prognostics method for analog electronic circuits. IEEE Transactions on Industrial Electronics, 2013, 60(11):5277-5291 doi: 10.1109/TIE.2012.2224074 [12] Shahriari M, Farrokhi M. Online state-of-health estimation of VRLA batteries using state of charge. IEEE Transactions on Industrial Electronics, 2013, 60(1):191-202 doi: 10.1109/TIE.2012.2186771 [13] Wang W B, Carr M, Xu W J, Kobbacy K. A model for residual life prediction based on Brownian motion with an adaptive drift. Microelectronics Reliability, 2011, 51(2):285-293 doi: 10.1016/j.microrel.2010.09.013 [14] Batzel T D, Swanson D C. Prognostic health management of aircraft power generators. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(2):473-483 doi: 10.1109/TAES.2009.5089535 [15] Park C, Padgett W J. Accelerated degradation models for failure based on geometric Brownian motion and Gamma processes. Lifetime Data Analysis, 2005, 11(4):511-527 doi: 10.1007/s10985-005-5237-8 [16] Gebraeel N Z, Lawley M A, Li R, Ryan J K. Residual-life distributions from component degradation signals:a Bayesian approach. IIE Transactions, 2005, 37(6):543-557 doi: 10.1080/07408170590929018 [17] Kaiser K A, Gebraeel N Z. Predictive maintenance management using sensor-based degradation models. IEEE Transactions on Systems, Man, and Cybernetics, Part A:Systems and Humans, 2009, 39(4):840-849 doi: 10.1109/TSMCA.2009.2016429 [18] Wang X. Wiener processes with random effects for degradation data. Journal of Multivariate Analysis, 2010, 101(2):340-351 doi: 10.1016/j.jmva.2008.12.007 [19] Wang X L, Guo B, Cheng Z J. Residual life estimation based on bivariate Wiener degradation process with time-scale transformations. Journal of Statistical Computation and Simulation, 2014, 84(3):545-563 doi: 10.1080/00949655.2012.719026 [20] Zio E, Peloni G. Particle filtering prognostic estimation of the remaining useful life of nonlinear components. Reliability Engineering and System Safety, 2011, 96(3):403-409 doi: 10.1016/j.ress.2010.08.009 [21] Cadini F, Zio E, Avram D. Monte Carlo-based filtering for fatigue crack growth estimation. Probabilistic Engineering Mechanics, 2009, 24(3):367-373 doi: 10.1016/j.probengmech.2008.10.002 [22] Wang X L, Balakrishnan N, Guo B. Residual life estimation based on a generalized Wiener degradation process. Reliability Engineering and System Safety, 2014, 124:13-23 doi: 10.1016/j.ress.2013.11.011 [23] 司小胜, 胡昌华, 周东华.带测量误差的非线性退化过程建模与剩余寿命估计.自动化学报, 2013, 39(5):530-541 http://www.aas.net.cn/CN/abstract/abstract17879.shtmlSi Xiao-Sheng, Hu Chang-Hua, Zhou Dong-Hua. Nonlinear degradation process modeling and remaining useful life estimation subject to measurement error. Acta Automatica Sinica, 2013, 39(5):530-541 http://www.aas.net.cn/CN/abstract/abstract17879.shtml [24] Feng L, Wang H L, Si X S, Zou H X. A state-space-based prognostic model for hidden and age-dependent nonlinear degradation process. IEEE Transactions on Automation Science and Engineering, 2013, 10(4):1072-1086 doi: 10.1109/TASE.2012.2227960 [25] 冯磊, 王宏力, 周志杰, 司小胜, 邹红星.基于状态空间的惯性测量组合剩余寿命在线预测.清华大学学报(自然科学版), 2014, 54(4):508-514 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201404019.htmFeng Lei, Wang Hong-Li, Zhou Zhi-Jie, Si Xiao-Sheng, Zou Hong-Xing. Residual life prediction based on the state space for inertial measurement units. Journal of Tsinghua University (Science and Technology), 2014, 54(4):508-514 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201404019.htm [26] Peng C Y, Tseng S T. Mis-specification analysis of linear degradation models. IEEE Transactions on Reliability, 2009, 58(3):444-455 doi: 10.1109/TR.2009.2026784 [27] Aalen O O, Gjessing H K. Understanding the shape of the hazard rate:a process point of view. Statistical Science, 2001, 16(1):1-22 https://www.researchgate.net/publication/2522219_Understanding_the_Shape_of_the_Hazard_Rate_A_Process_Point_of_View [28] Lee M L T, Whitmore G A. Threshold regression for survival analysis:modeling event times by a stochastic process reaching a boundary. Statistical Science, 2006, 21(4):501-513 doi: 10.1214/088342306000000330 [29] Akaike H. A new look at the statistical model identification. IEEE Transactions on Automatic Control, 1974, 19(6):716-722 doi: 10.1109/TAC.1974.1100705 [30] Carr M J, Wang W B. An approximate algorithm for prognostic modelling using condition monitoring information. European Journal of Operational Research, 2011, 211(1):90-96 doi: 10.1016/j.ejor.2010.10.023 -

 下载:
下载:

计量
- 文章访问数: 3102
- HTML全文浏览量: 575
- PDF下载量: 823
- 被引次数: 0
