

-
摘要: 模块化机器人的重构规划中,由于各模块的目标分配与其轨迹规划之间的耦合关系导致组合爆炸问题.本文提出一种基于简化模型的能量次优规划方法,将重构规划问题转化为最优控制问题,实现目标分配与轨迹规划的解耦.通过求解由Hamilton-Jacobi-Bellman(HJB)方程描述的最优控制问题,得到简化模型的值函数和最优轨迹.各模块的运动目标由值函数的吸引域决定.通过在最优轨迹附近的次优区域内搜索得到实际运动轨迹,提高了搜索效率.仿真实验结果表明,该方法能够选择合适的模块组合,并能在障碍物环境中生成满足机器人动力学约束的运动轨迹.Abstract: In reconfiguration planning of modular robots, coupling between goal assignment for individual modules and their trajectory planning leads to the combinatorial explosion problem. This paper proposes an energy suboptimal planning approach based on a simplified model. The problem of reconfiguration planning is transformed into an optimal control problem, which decouples goal assignment and trajectory planning. By solving the optimal control problem described by the Hamilton-Jacobi-Bellman (HJB) equation, a value function and optimal trajectories of the simplified model are derived. Respective goals of the modules are determined by attraction regions of the value function. Actual trajectories are obtained by searching in suboptimal regions that locate in the neighborhood of optimal trajectories of the simplified model. Simulation results show that the proposed approach can select a proper set of modules, and that generated trajectories can satisfy the dynamic constraint of the robot in an environment with obstacles.
-
Key words:
- Modular robots /
- reconfiguration planning /
- model reduction /
- optimal control
1) 本文责任编委 侯增广 -
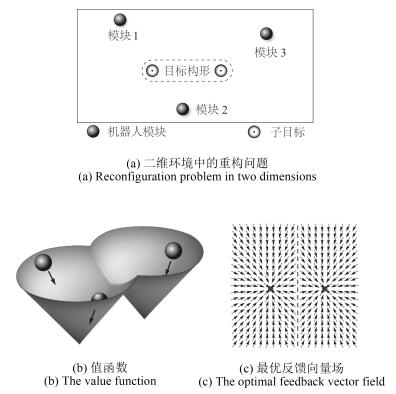
图 2 二维无约束机器人重构例子
Fig. 2 The reconfiguration example of unconstrained robots in two dimensions
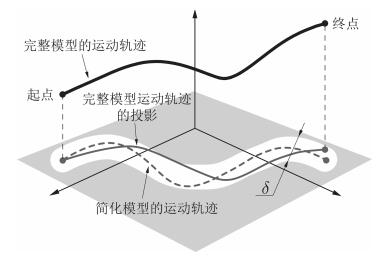
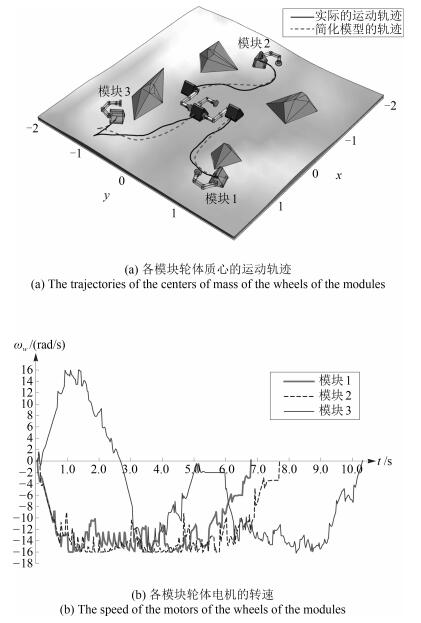
图 3 完整模型与简化模型的运动轨迹
Fig. 3 The trajectory of the full model and that of the simplified model
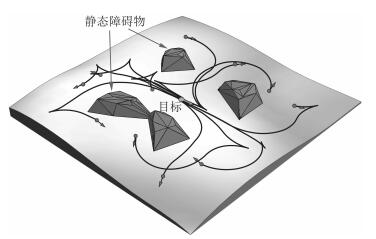
图 5 不同初始位姿及单目标下简化模型的最优轨迹
Fig. 5 The optimal trajectories of the simplified model with a single goal and different initial poses
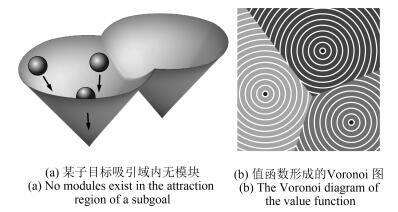
图 9 二维无约束机器人距离最优重构的值函数
Fig. 9 The value function of the reconfiguration of two dimensional unconstrained robots with optimal distance
表 1 仿真参数
Table 1 The simulation parameters
参数含义 参数名 值 轮体质量 $m_b /{\mathrm {kg}}$ 6 手臂总质量 $m_a /{\mathrm {kg}}$ 2 履带长度(宽度) $l_t(w_t) /{\mathrm m}$ 0.2(0.2) 履带离散间隔 $(\Delta x, \Delta y) /{\mathrm m}$ (0.02, 0.02) 最小转向半径 $r_m /{\mathrm m}$ 0.3 优化准则参数 $(c1, c2, c3, c4) $ (8.1, 5.3, 28.0, 25.0) 网格离散间隔 $(h_x, h_y, h_{\theta}, h_v)$ (0.05, 0.05, 0.13, 0.05) 次优区域半径 $\varepsilon /{\mathrm m}$ 0.1 搜索网格离散间隔 $(\textrm{d}x, \textrm{d}y, \textrm{d}\theta)$ (0.02, 0.02, 0.2) 单次探索距离 $\Delta s /{\mathrm m}$ 0.05 地面力学常数 $(k_c, k_{\phi}, n_t, C)$ (0.99, 1 528, 1.1, 5×104) 地面特征参数 $(c, \varphi, K)$ $(1 040, 28^{\circ}, 0.0254) $  下载: 导出CSV
下载: 导出CSV
-
[1] Yim M, Shen W M, Salemi B, Rus D, Moll M, Lipson H, Klavins E, Chirikjian G S. Modular self-reconfigurable robot systems. IEEE Robotics & Automation Magazine, 2007, 14(1):43-52 https://core.ac.uk/display/4884512 [2] 贺鑫元, 马书根, 李斌, 王越超.可重构星球探测机器人的机构设计.机械工程学报, 2005, 41(12):190-195 doi: 10.3321/j.issn:0577-6686.2005.12.038He Xin-Yuan, Ma Shu-Gen, Li Bin, Wang Yue-Chao. Mechanical design of reconfigurable planetary rover. Chinese Journal of Mechanical Engineering, 2005, 41(12):190-195 doi: 10.3321/j.issn:0577-6686.2005.12.038 [3] Bhat P, Kuffner J, Goldstein S, Srinivasa S. Hierarchical motion planning for self-reconfigurable modular robots. In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China:IEEE, 2006. 886-891 [4] Dewey D J, Ashley-Rollman M P, De Rosa M, Goldstein S C, Mowry T C, Srinivasa S S, Pillai P, Campbell J. Generalizing metamodules to simplify planning in modular robotic systems. In:Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France:IEEE, 2008. 1338-1345 [5] Vassilvitskii S, Kubica J, Rieffel E, Suh J, Yim M. On the general reconfiguration problem for expanding cube style modular robots. In:Proceedings of the 2002 IEEE International Conference on Robotics and Automation. Washington, USA:IEEE, 2002. 801-808 [6] Yoshida E, Murata S, Kamimura A, Tomita K, Kurokawa H, Kokaji S. A motion planning method for a self-reconfigurable modular robot. In:Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui, HI, USA:IEEE, 2001. 590-597 [7] Hu Y N, Ma S G, Li B, Wang M H, Wang Y C. Reconfiguration planning for wheel-manipulator robots. In:Proceedings of the 5th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems. Shenyang, China:IEEE, 2015. 529-534 [8] Lavalle S M, Kuffner J J Jr. Randomized kinodynamic planning. The International Journal of Robotics Research, 2001, 20(5):378-400 doi: 10.1177/02783640122067453 [9] Cherif M. Motion planning for all-terrain vehicles:a physical modeling approach for coping with dynamic and contact interaction constraints. IEEE Transactions on Robotics and Automation, 1999, 15(2):202-218 doi: 10.1109/70.760342 [10] Tokekar P, Karnad N, Isler V. Energy-optimal trajectory planning for car-like robots. Autonomous Robots, 2014, 37(1):279-300 doi: 10.1007/s10514-014-9390-3 [11] Howard T M, Kelly A. Optimal rough terrain trajectory generation for wheeled mobile robots. The International Journal of Robotics Research, 2007, 26(2):141-166 doi: 10.1177/0278364906075328 [12] Burridge R R, Rizzi A A, Koditschek D E. Sequential composition of dynamically dexterous robot behaviors. The International Journal of Robotics Research, 1999, 18(6):534-555 doi: 10.1177/02783649922066385 [13] 朱耀麟, 杨志海, 陈西豪.模型降阶方法研究.微计算机信息, 2011, 27(6):22-25 http://cdmd.cnki.com.cn/Article/CDMD-10246-1014446686.htmZhu Yao-Lin, Yang Zhi-Hai, Chen Xi-Hao. Investigation on the methods of model reduction. Microcomputer Information, 2011, 27(6):22-25 http://cdmd.cnki.com.cn/Article/CDMD-10246-1014446686.htm [14] Yamane K. Systematic derivation of simplified dynamics for humanoid robots. In:Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots. Osaka, Japan:IEEE, 2012. 28-35 [15] Ostrowski J P. Computing reduced equations for robotic systems with constraints and symmetries. IEEE Transactions on Robotics and Automation, 1999, 15(1):111-123 doi: 10.1109/70.744607 [16] Tabuada P, Ames A D, Julius A, Pappas G J. Approximate reduction of dynamic systems. Systems & Control Letters, 2008, 57(7):538-545 http://www.sciencedirect.com/science/article/pii/S0167691107001752 [17] 胡亚南, 马书根, 李斌, 王明辉, 王越超.轮手一体机器人群体构形的模块化动力学建模方法.机械工程学报, 2015, 51(1):24-33 http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201501004.htmHu Ya-Nan, Ma Shu-Gen, Li Bin, Wang Ming-Hui, Wang Yue-Chao. Modular dynamics modeling approach of group configuration of wheel-manipulator robots. Journal of Mechanical Engineering, 2015, 51(1):24-33 http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201501004.htm [18] Lin F, Brandt R D, Sun J. Robust control of nonlinear systems:compensating for uncertainty. International Journal of Control, 1992, 56(6):1453-1459 doi: 10.1080/00207179208934374 [19] Khalil H K.非线性系统(第3版).北京:电子工业出版社, 2012. 116-120Khalil H K. Nonlinear Systems (3rd Edition). Beijing:Publishing House of Electronics Industry, 2012. 116-120 [20] Bardi M, Capuzzo-Dolcetta I. Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations. Boston:Birkhäuser, 1997. [21] Crandall M G, Lions P L. Two approximations of solutions of Hamilton-Jacobi equations. Mathematics of Computation, 1984, 43:1-19 doi: 10.1090/S0025-5718-1984-0744921-8 [22] Osher S, Fedkiw R. Level Set Methods and Dynamic Implicit Surfaces (Applied Mathematical Sciences). New York:Springer, 2003. [23] Tsai Y H R, Cheng L T, Osher S, Zhao H K. Fast sweeping algorithms for a class of Hamilton-Jacobi equations. SIAM Journal on Numerical Analysis, 2003, 41(2):673-694 doi: 10.1137/S0036142901396533 [24] Takei R, Tsai R. Optimal trajectories of curvature constrained motion in the Hamilton-Jacobi formulation. Journal of Scientific Computing, 2013, 54(2-3):622-644 doi: 10.1007/s10915-012-9671-y [25] Solis J M, Longoria R G. Modeling track-terrain interaction for transient robotic vehicle maneuvers. Journal of Terramechanics, 2008, 45(3):65-78 doi: 10.1016/j.jterra.2008.07.003 [26] Huang M H, Orin D E. Dynamic simulation of actively-coordinated wheeled vehicle systems on uneven terrain. In:Proceedings of the 2001 IEEE International Conference on Robotics and Automation. Seoul, South Korea:IEEE, 2001. 779-786 -

 下载:
下载:

计量
- 文章访问数: 1731
- HTML全文浏览量: 383
- PDF下载量: 604
- 被引次数: 0
