

Design and Control of An Active Gravity Offloading System for Rehabilitation Training of Gait and Balance
-
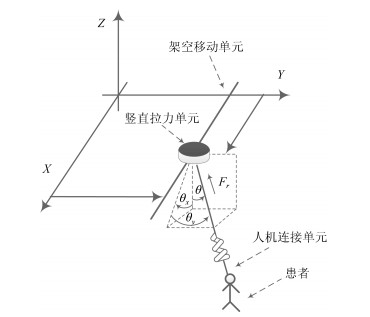
摘要: 针对患者神经损伤后发生的下肢运动障碍,减重步行训练是一种重要的康复训练方式.对于中度和轻度患者,为其提供部分身体重力支撑(Body weight support,BWS)并激励其自主行走,可以提高患者的主动参与,并有助于改善其步态和平衡控制能力,从而有望取得更好的康复效果.现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文面向步态和平衡康复训练应用,采用单绳悬吊方式,设计电机驱动的竖直拉力单元,从而构建了一种主动减重系统.在水平方向,采用桥式吊架结构,通过伺服控制消除吊绳偏摆使其保持竖直,从而避免对患者产生前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标,是典型的欠驱动系统.为此,采用绳牵引串联弹性驱动方法,将位置和吊绳拉力耦合起来.针对系统中存在的非线性、摩擦等不利因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统安全运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.最后,通过仿真实验检验了本文提出的主动减重系统和控制方案效果.由此,可为下肢运动障碍患者提供一种方便高效的康复训练手段.Abstract: Gait training with body weight support (BWS) is an effective rehabilitation therapy for patients with neural disorders and locomotion difficulties. For medium and mild patients, walking with BWS may encourage their active participations into locomotion training and balance control to improved functional recovery. However, current BWS technologies suffer from problems of limited movement space, force inaccuracy, undesired lateral force, etc. In this work, we propose an active gravity offloading system for gait and balance training. The BWS force is provided with a single rope suspension. In the horizontal X-Y plane, the servo unit moves the BWS unit to follow the motion of the patient and keeps the rope perpendicular to the ground so that no lateral force is produced to disturb the patient. In the vertical direction, since there is only one control degree of freedom for position following in Z-direction and suspension force control along the cable the BWS is designed with a cable-driven series elastic actuation structure, which couples the force and displacement along the rope. To deal with nonlinearities, friction and uncertainties in the system, the sliding mode control method is taken for the rope deflection angle controller and force controller. Further, to keep the system running inside a safety boundary, another position controller is designed for the moving plate that connects with the spring in the BWS unit. With extensive simulations experiments, feasibility and efficacy of the active gravity offloading system are validated. This system promises an effective rehabilitation platform for patients with locomotion difficulties.
-
假手是一类典型的人机交互设备, 对于辅助手臂截肢患者恢复手部功能有着重要的作用.针对残疾人的需求, 国内外学者开展了大量的研究工作[1-5], 研制了众多的假手, 包括:美容师式假手、拉索控制式假手、开关控制电动假手、肌电控制假手.其中基于肌电控制的假手由于动作自然、符合人体的操作习惯而受到广泛的关注.
为全面描述肌电假手的控制过程, Losier提出了一种包含3个大层共8个子层的肌电假手控制模型[6], 该模型明确了肌电假手各个环节的任务和功能.按可活动关节的数量分类, 肌电假手可以分为单自由度假手和多自由度假手, 目前学者更多地关注多自由度假手的研究.基于肌电信号的多自由度假手研究中, 常用的方法有人工神经网络(Artificial neural network, ANN)[7-9]、支持向量机(Support vector machines, SVM)[9-12]、局部加权投影回归(Locally weighted projection regression, LWPR), 线性映射等, 这些方法的目的都是在于寻找一种从肌电信号特征到人体肢体动作的映射关系.国内外学者利用多层感知器网络(Multi-layer perception network, MLP)[13-18]和递归神经网络(Recurrent neural network)在该领域做了大量的研究.此外, 文献[19]基于肌电信号的生成模型并采用非负矩阵分解方法(Nonnegative matrix factorization, NMF)从多通道肌电信号中同步识别肢体的多关节运动信息; 文献[16, 20-22]采用线性分类方法实现上肢多关节的同步运动识别, 并将线性分类识别的结果与MLP、ANN和SVM的识别结果进行比较, 其结果显示线性映射的训练时间远远小于ANN、SVM等复杂的方法所需的训练时间, 同时线性映射方法也表现出了较好的运动意图识别效果.
总结现有研究文献, 多自由度肌电假手的控制依赖于多通道的肌电信号, 对于截肢后肌肉出现萎缩、截肢部位较高等情况的患者, 他们手臂上残留的可以进行肌电信号测量的部位较少, 无法采用多个传感器测量多路信号来进行动作模式的识别, 给假手的使用带来困难.本文针对这一类患者的需求, 提出了一种基于脑电信号(Electroencephalogram, EEG)与表面肌电信号(Surface electromyogram signal, sEMG)结合的假手控制策略.本文采用1个便携式脑电传感器和1个表面肌电传感器实现了二自由度假手的控制.脑电传感器用于捕获头部前额区域的EEG信号, 将从中提取到的眨眼信息用于假手动作的编码; 表面肌电传感器用于捕获手臂上的肌电信号, 经过处理后用于估计手部动作的强度; 为了实现EEG和sEMG在假手控制中的协同工作, 设计了用于触觉反馈的振动袖带, 袖带可向佩戴者提供假手当前的动作模式, 便于佩戴者及时调整假手的控制模式以达到最佳控制效果.
1. 控制策略设计
EEG是人机交互中常用的一种信号, 基于EEG的假手控制, 最大的优势在于不受限于肢体的残疾程度, 即使是手臂高位截肢的残疾人, 只要其脑功能完整, 能够发出肢体的控制指令就可以利用EEG来实现假手的控制.但是, 与sEMG相比, 基于EEG的肢体运动意图识别准确率较低, 存在较大的随机性, 表情、情绪、注意力等的改变都会影响到大脑产生的EEG信号.为此, 本文提出一种基于EEG和sEMG协同控制假手的方法.
本文设计的假手控制策略框图如图 1所示, 主要包括基于EEG的动作类型判别、基于sEMG的动作强度估计和动作类型的触觉提示等几个部分.
首先, 当用户需要控制假手时, 根据预先编码做出相应的动作, 控制器根据EEG信号进行特征提取和动作类型判别.然后通过触觉反馈将动作的类型反馈给用户, 用户在接收到触觉反馈后可以根据需要对动作进行确认和取消; 若用户确认, 则控制器根据sEMG信号对动作的期望强度进行估计, 并控制假手动作的强度; 若用户取消, 则控制器重新检测用户期望的动作类型.
1.1 动作类型编码
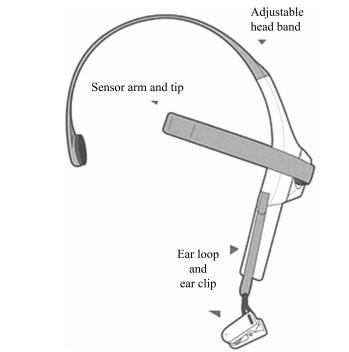
在测试者的头皮粘贴导电电极来捕获信号是脑电信号测量的常用方法, 这种方法需要专业人士操作, 且操作过程复杂、测量设备庞大, 给实际应用带来了不便.本文采用Neurosky公司生产的便携式测量设备MindWave进行脑电信号的测量, 由于MindWave只在测试者前额设置一个测量点, 因此很难从测量得到的信号中提取到脑部的运动想象信号.通过观察信号发现, 眨眼动作的信号可以在MindWave的测试中明显地体现出来, 因此本文拟从测试者前额的EEG信号中提取眨眼动作的信息, 并将单位时间内检测到的眨眼信息用于假手动作的编码.
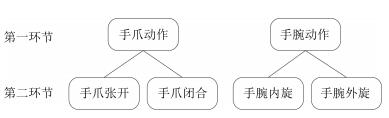
本文设计基于单位时间内眨眼次数的假手动作编码, 如图 2和表 1所示.动作编码分两个环节进行, 第一环节为手爪动作和手腕动作的判别, 第二环节为具体动作类型(手爪张开、合, 手腕顺、逆旋转)的判别.后续实验中本文选择单位时间长度为2 s.
表 1 单位时间内眨眼次数与假手动作类型的关系Table 1 The relationship between the blink times and the motion type of the prosthetic hand第一环节眨眼次数 第二环节眨眼次数 动作类型 2 2 手爪张开 3 手爪闭合 3 2 手腕顺时针转动 3 手腕逆时针转动 当用户有手部动作需求时, 根据预设的编码作出相应的眨眼动作, 控制器通过分析EEG信号的特征来进行动作的判别.本文选取方差作为特征来进行眨眼动作的检测.
$ \begin{align} VAR=\frac{1}{N-1}\sum^{t}_{i=t-N+1}(E_i-AE)^2 \end{align} $
(1) 其中, $E_t$为当前采样时刻的EEG信号, $N$为窗口长度, $AE$为EEG信号的均值.
MindWave测量得到的EEG信号以及信号的方差如图 3所示.通过统计EEG方差信号中极值点的数量即可得到单位时间内受试者的眨眼次数.
1.2 动作强度估计
表面肌电信号(sEMG)是由肌肉兴奋时所募集的运动单元产生的一个个动作电位序列(Motor unit action potential trains, MUAPT)在皮肤表面叠加而成, 是一种非平稳的微弱信号.它既与肌肉本身的组织生理特性有关, 也与神经控制系统有关.
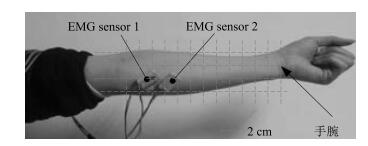
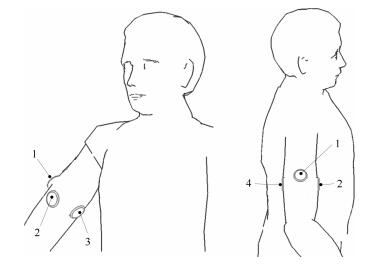
由于肌电信号存在很强的个体差异, 不同测试者在手臂相同位置测量得到的肌电信号差异较大; 测量部位不确定, 同样会带来肌电信号的差异, 如图 4所示, 在人体手臂尺侧腕屈肌上粘贴两个肌电传感器, 测量得到的两路信号如图 5所示, 从图中可以看出, 同一佩戴者在其手臂同一块肌肉不同位置测量得到的肌电信号是存在差异的, 而在使用过程中, 传感器在手臂上的贴合位置不可避免地会发生变化, 这导致使用过程中肌电信号会发生变化; 此外由于环境温、湿度的变化会引起传感器和皮肤之间阻抗的变化, 从而导致测量得到的肌电信号发生变化.这些因素导致残疾人在安装佩戴假手时, 需要先对其残臂上的肌电信号进行测量, 然后根据其肌电信号的强度对假手的控制参数进行调整, 并且往往需要经过一段较长时间的训练和适应, 佩戴者才能够较为灵活地控制假手.而且对于同一个佩戴者, 在使用假手一段时间后, 其假手的控制参数也可能需要重新进行调整, 这给假手的使用带来极大的不便.
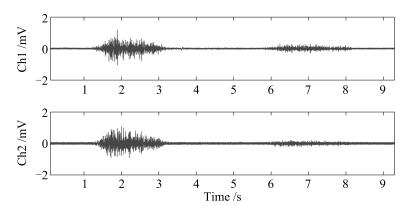 图 5 同一块肌肉不同位置测量得到的两路肌电信号Fig. 5 Two channels of sEMG captured from different locations of the same muscle
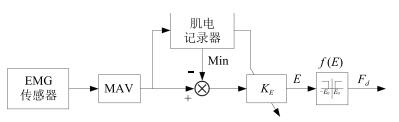
图 5 同一块肌肉不同位置测量得到的两路肌电信号Fig. 5 Two channels of sEMG captured from different locations of the same muscle为了消除肌电信号个体差异和传感器测量位置差异等因素给假手控制带来的不便, 本文采用自适应方法进行假手开合速度/握力的估计[23], 如图 6所示. 图 6中传感器采集得到肌电信号经过绝对值均值处理后送入肌电记录器, 肌电记录器实时记录并更新肌电绝对值均值的最大值和最小值, 并将其用于调整比例因子$K_E$.
传感器采集得到原始肌电信号, 在幅值上表现出很强的随机性, 无法直接用于假手的控制.肌电信号的绝对值均值(Mean absolute value, MAV)是能够直观地反映出肌肉的收缩强度的一个时域特征, 因此本文选用MAV进行动作强度的估计, MAV的计算如下:
$ \begin{align} MAV (t)=\frac{1}{N-1}\sum^{t}_{i = t-N+1}|EMG(i)| \end{align} $
(2) 其中, $EMG(i)$为第$i$个采样时刻采集得到的肌电信号, $N$为滑动窗口的长度.
设计调节因子$K_E$为
$ \begin{align} K_E=\frac{K}{Max_E-Min_E} \end{align} $
(3) 其中, $K$为预设的常数, $Max_E$和$Min_E$分别为肌电绝对值均值的最大值和最小值. $Max_E$和$Min_E$的更新过程如下:
步骤 1.计算MAV的均值
$ \begin{align} Ave=\frac{1}{N}\sum^{N-1}_{n=0}MAV (t-n) \end{align} $
(4) 其中, $MAV (t)$为当前采样时刻的MAV值, $MAV (t-n)$为前$n$采样时刻的MAV值.
步骤 2.数据更新
$ Ma{x_E} = \left\{ {\begin{array}{*{20}{l}} {Ma{x_E}, }&{Ma{x_E} \geqslant Ave} \\ {Ave, }&{Ma{x_E} < Ave} \end{array}} \right. $
(5) $ Mi{n_E} = \left\{ {\begin{array}{*{20}{l}} {Mi{n_E}, }&{Mi{n_E} \leqslant Ave} \\ {Ave, }&{Mi{n_E} > Ave} \end{array}} \right. $
(6) $ E = (EMG-Mi{n_E}) \times {K_E} $
(7) 为了减少假手佩戴者的手臂在放松状态下由于微小干扰而造成假手误动作, 在动作强度估计中增加了去抖动环节$f(E)$[24].
$ \begin{align} f(E)=1+\frac{1}{2}({\rm sgn}(E-E_0)-{\rm sgn}(E+E_0)) \end{align} $
(8) 其中, $E_0$为手臂放松状态下测量得到的肌电信号的绝对值均值.
动作强度的估计值为
$ \begin{align} F_d=E\times f(E) \end{align} $
(9) 将$F_d$对应于假手手爪的开合速度、握力、手腕旋转速度, 即可实现假手动作强度的控制.对于手爪而言, 在自由空间内$F_d$对应于手爪的期望开合速度, 在约束空间内对应于手爪的期望握力; 对于手腕而言, $F_d$对应于手腕的旋转速度.本文后续实验中采用文献[25]中所述的基于刚度模糊观测的反演控制方法进行假手动作的控制.
1.3 触觉提示
人体皮肤表面分布有大量的触觉感受器, 能够感知外界的刺激.在触觉刺激的研究中, 常用的方法有电刺激、顶针刺激、热刺激和振动刺激等, 其中机械振动刺激是一种较为理想的触觉刺激方式, 其装置简单小巧、感知舒适性好、响应速度快、可调范围大、平均功耗低、一致性好且易于驱动控制.振动刺激装置产生的机械振动作用于人体不同部位皮肤, 可以通过控制机械振动信号的波形、频率、幅值和作用方式等产生不同的触觉刺激.因此, 本文选择振动刺激来实现向人体进行信息反馈.
为了便于使用, 本文将触觉提示装置设计成袖带形式, 如图 7所示, 主要包括4个微型振动器、振动器驱动模块、控制模块、蓝牙模块以及锂电池等.蓝牙模块接收假手当前的动作信息并输入控制模块, 控制模块根据接收到的信息输出相应的振动编码控制振动器的振动.振动器在袖带上的位置可以根据需要进行调整, 使用时将袖带绑在测试者的上臂, 调整振动器的位置即可得到如图 8所示的振动器分布.
振动器是本文触觉提示装置的核心, 选用振动型空心杯电机作为振子, 直径10 mm, 厚度4 mm, 该电机最大工作电压为5 V, 最大工作电流100 mA, 由脉冲宽度调制PWM控制.本文依据前人研究采用频率100 Hz, 占空比$50 \%$, 电平5 V的PWM控制振动器的振动[26].
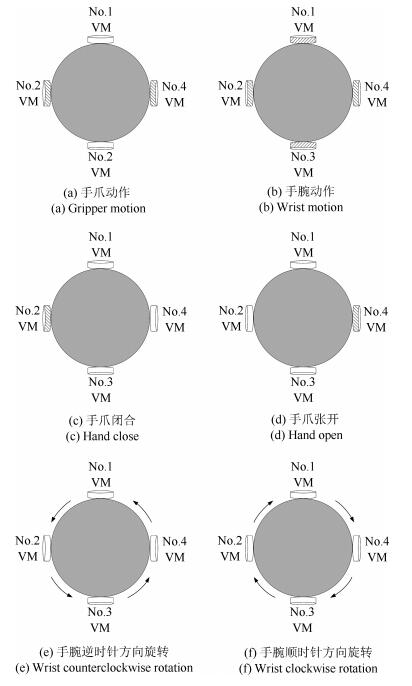
本文设计振动袖带的目的在于实现EEG和sEMG对假手的协同控制.为了便于测试者准确把握假手当前的状态, 设计了6种振动刺激编码用于向佩戴者反馈假手当前的工作状态.如图 9所示, 设计的6种振动刺激分别对应于手爪动作、手腕动作、手爪闭合、手爪张开、手腕顺时针旋转、手腕逆时针旋转.
2号和4号振子同时振动代表动作类型为手爪开合动作, 只有2号振子振动代表动作类型为手爪的闭合动作, 只有4号振子振动代表动作类型为手爪的张开动作.
1 $\sim$ 4号振子同时振动代表动作类型为手腕的旋转动作, 4个振子的振动顺序为1-2-3-4时代表动作类型为手腕的逆时针转动, 4个振子的振动顺序为1-4-3-2时代表动作类型为手腕的顺时针旋转.
图 10为本文设计的EEG和sEMG协同控制流程.控制器首先进行手爪动作和手腕动作的判别, 并给出相应的触觉提示, 随后进行具体动作类型(手爪张开、合, 手腕顺、逆旋转)的判别.
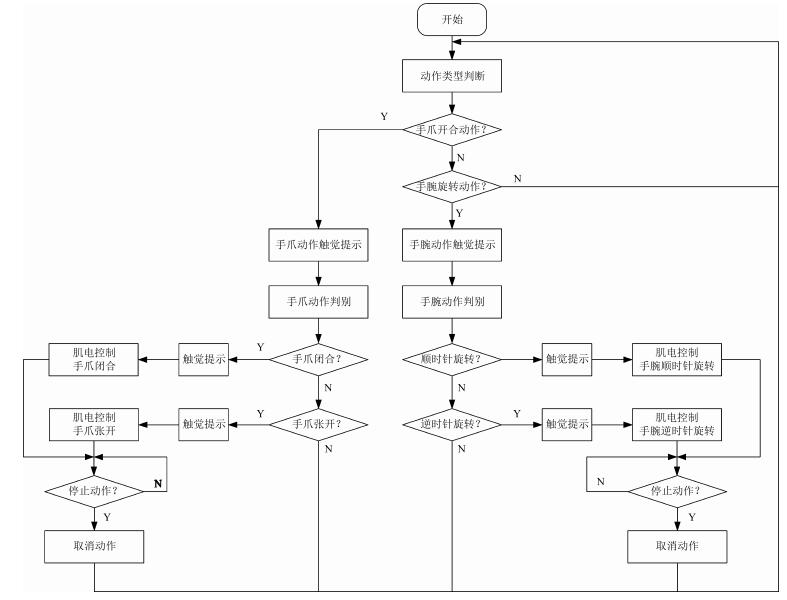 图 10 EEG和sEMG协同控制流程图Fig. 10 Flow chart of the coordinated control based on EEG and sEMG
图 10 EEG和sEMG协同控制流程图Fig. 10 Flow chart of the coordinated control based on EEG and sEMG以手爪闭合动作为例, 用户首先眨眼两次, 触觉反馈系统会控制振动袖带中2号和4号振子振动, 提示用户当前为手爪动作; 用户继续眨眼三次, 触觉反馈系统会控制振动袖带中2号振子振动, 提示用户当前为手爪闭合动作; 随后控制器根据sEMG信号对动作的期望强度进行估计, 并控制假手动作的强度; 闭合动作完成后, 用户只需再眨眼三次即可停止当前的动作.
2. 实验
为验证该控制策略的可行性, 进行了实验. 10名健康受试者(5男, 5女; 年龄: 22 $\sim$ 29岁)参与了本文实验.实验包括动作编码实验、触觉感知实验和假手取物实验.实验场景如图 11所示.
实验中采用MindWave测量EEG信号, 如图 12所示, 该设备将一个干电极贴合在测试者前额部位进行EEG信号的测量, 设备通过蓝牙接口实时输出采样率512 Hz的脑电信号.
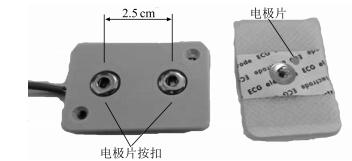
实验中采用实验室自行研制的表面肌电传感器进行sEMG信号的测量, 如图 13所示.该传感器在一个3.5 cm $\times$ 5 cm的塑料板上设置两个用于连接电极片的按扣, 两个按扣的中心距为2.5 cm, 所用的电极片为上海钧康医用设备有限公司生产的JK-1 (A)型一次性电极片, 该电极片由Ag/AgCl电极板、导电胶和背衬等组成, 背衬粘贴面积为3.4 cm $\times$ 4.8 cm, 能够很好地满足粘贴要求.使用时将该传感器粘贴在手臂肱侧腕屈肌皮肤表面即可进行肌电信号的测量, 实验中设置sEMG信号的采样率为512 Hz.
实验中所用的假手为实验室与丹阳假肢厂有限公司联合研制的假手, 如图 14所示.该假手为二自由度假手, 由两个直流电机分别控制手爪开合机构和手腕旋转机构的动作, 戴上硅胶手套后该假手具有与自然人手一样的外形.
2.1 动作编码实验
动作编码实验过程中, 受试者根据电脑屏幕的动作提示, 结合图 2和表 1所示的编码流程进行眨眼动作.电脑屏幕随机输出4种动作提示, 每种动作输出25次, 对于每个电脑屏幕给出的动作, 要求受试者在5秒钟内完成相应的眨眼动作. 图 15为某受试者对手爪闭合动作进行眨眼编码时测量得到的EEG数据.
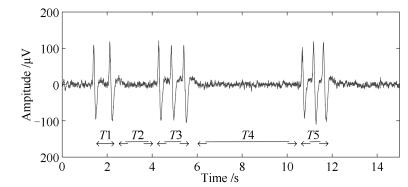 图 15 对手爪闭合动作进行眨眼编码时测量得到的EEGFig. 15 EEG captured in the process of blink coding of the hand closing
图 15 对手爪闭合动作进行眨眼编码时测量得到的EEGFig. 15 EEG captured in the process of blink coding of the hand closing图 15中, $T1$时间段内眨眼两次代表选择的动作为手爪动作, $T2$时间段内振动袖带中的2号和4号振动器会发生振动提示用户当前的动作类型为手爪动作, $T3$时间段内眨眼3次代表选择的动作为手爪闭合, $T4$时间段袖带中的2号振动器会发生振动提示用户当前动作为手爪闭合, $T5$时间段内眨眼3次代表取消了手爪的动作.
统计10位受试者的实验结果如表 2所示.从表 2可以看出, 10位受试者对手部4个动作进行眨眼编码的平均正确率均达到$92 \%$以上, 受试者可以很好地通过眨眼来实现手部动作的编码.
表 2 手部动作识别结果Table 2 Results of the hand motion recognition experiments受试者编号 性别 动作编码正确率(%) 手爪张开 手爪闭合 顺时针旋转 逆时针旋转 平均正确率 1 女 96 100 100 96 98 2 女 96 92 96 92 94 3 女 92 96 96 96 95 4 女 96 92 92 96 94 5 女 92 100 96 100 97 6 男 96 96 92 100 96 7 男 92 96 96 96 95 8 男 92 92 96 96 94 9 男 96 100 92 92 95 10 男 92 88 92 96 92 2.2 触觉感知实验
将振动袖带佩戴于受试者的上臂, 触觉感知实验过程中(如图 8所示), 计算机通过蓝牙接口随机向振动袖带发送6种振动编码, 每种编码发送20次, 受试者根据自身感觉记录当前振动编码对应的动作类型.统计10位受试者的实验结果如表 3所示.从表 3可以看出, 10位受试者对手部动作的触觉编码感知的平均正确率均达到$98.33 \%$以上, 受试者可以很好地分辨出4种手部动作对应的触觉编码.
表 3 触觉感知实验结果Table 3 Results of the tactile perception experiments受试者编号 性别 动作编码正确率(%) 手爪动作 手腕动作 手爪张开 手爪闭合 顺时针旋转 逆时针旋转 平均正确率 1 女 100 100 100 100 100 100 100 2 女 100 100 100 100 100 100 100 3 女 100 100 100 100 95 95 98.33 4 女 100 100 100 100 100 100 100 5 女 100 100 100 100 95 100 99.17 6 男 100 100 100 100 100 95 99.17 7 男 100 100 100 100 100 95 99.17 8 男 100 100 100 100 100 100 100 9 男 100 100 100 95 95 100 98.33 10 男 100 100 95 100 95 95 97.5 2.3 假手取物实验
进行动作编码实验和触觉感知实验后, 进行了假手取物实验, 即受试者采用本文提出的控制策略控制假手抓取物体.实验前每位受试者有5分钟时间熟悉假手的控制, 实验内容分为硬物抓取实验和纸杯抓取实验, 如图 16所示.
硬物抓取实验:要求每位受试者控制假手抓取并移动重量为200 g的砝码20次, 砝码掉落视为抓取失败, 统计10位受试者的实验结果如表 4所示.
表 4 砝码抓取实验结果Table 4 Results of the grasping weights受试者编号 性别 成功率(%) 1 女 95 2 女 95 3 女 90 4 女 100 5 女 95 6 男 90 7 男 100 8 男 95 9 男 95 10 男 100 纸杯抓取实验:要求每位受试者控制假手抓取并移动装有水的纸杯20次, 纸杯掉落或杯中的水溢出视为抓取失败, 统计10位受试者的实验结果如表 5所示.
表 5 纸杯取实验结果Table 5 Results of the grasping paper cups受试者编号 性别 成功率(%) 1 女 95 2 女 95 3 女 90 4 女 100 5 女 95 6 男 90 7 男 100 8 男 95 9 男 95 10 男 100 从表 4和表 5可以看出, 在硬物(砝码)的抓取实验中, 10位受试者的抓取成功率均达到$90 \%$以上, 在纸杯的抓取实验中, 10位受试者的抓取成功率均达到$70 \%$以上.纸杯抓取实验的成功率明显低于砝码抓取实验的成功率.纸杯抓取过程中受试者由于紧张等因素易造成手臂上的sEMG出现波动, 从而导致将抓取失败.
3. 结论
本文针对残臂较短或残臂上肌电测量点较少的残疾人使用假手的需求, 提出了一种基于EEG和sEMG协同处理的假手控制策略, 仅用1个肌电传感器和1个脑电传感器实现了多自由度假手的控制.从头部前额捕获脑电信号并从中提取出眨眼动作信息, 提取得到的眨眼动作信息用于假手动作的编码; 从人体手臂上获取肌电信号, 经过自适应处理后用于估计手部动作的强度; 设计用于触觉反馈的振动袖带, 可将假手当前的动作类型反馈给假手的佩戴者, 佩戴者在振动袖带的帮助下可以及时把握当前假手的动作模式, 以便更好地控制假手.为验证该控制策略的有效性, 进行了实验, 实验结果表明本文提出的方法具有有效性.
-
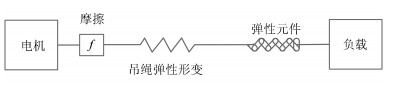
图 2 基于串联弹性结构的绳索驱动拉力单元示意图
Fig. 2 Illustration of the cable actuation unit with the SEA structure

图 3 主动减重系统的机械设计图(上:系统的总体设计图; 下:竖直拉力单元的机构设计图)
Fig. 3 Mechanical design of the active gravity offloading system (Top: the overall system; Bottom: the body weight support unit)
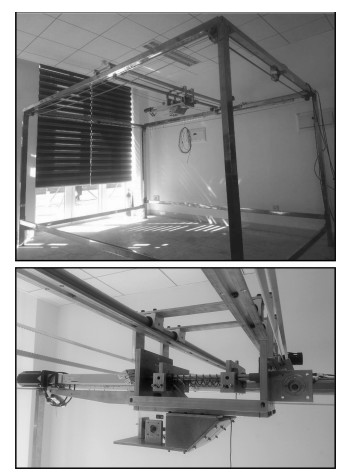
图 4 主动减重系统的实验平台集成(上:总体系统; 下:竖直拉力单元)
Fig. 4 The experimental platform for active gravity offloading (Top: the overall system; Bottom: the body weight support unit)
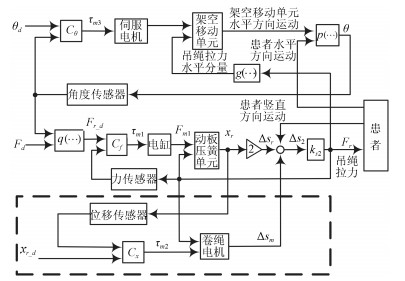
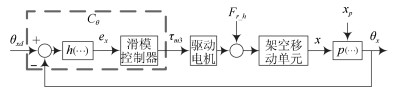
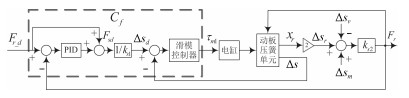
图 5 主动减重系统工作原理框图(${C_\theta }$控制吊绳竖直; ${C_f}$在跟随吊绳竖直方向运动的同时, 控制吊绳拉力; ${C_x}$在必要情况下开始工作, 控制动板位置在安全的范围内)
Fig. 5 The working diagram of the active gravity offloading system ($C_{\theta}$ controls the cable to be perpendicular to the ground; $C_{f}$ controls the cable force while following its motion; $C_x$ works in necessary conditions to control the moving plates stay within the safety range)
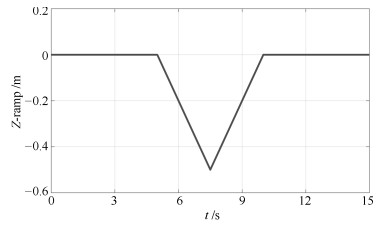
图 9 患者蹲下和站起时竖直方向位置变化曲线
Fig. 9 The vertical position of the subject when crouching and standing up
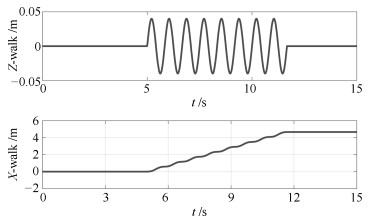
图 10 患者步行时竖直方向和水平方向位置变化曲线
Fig. 10 The horizontal and vertical position of the subject during ground walking
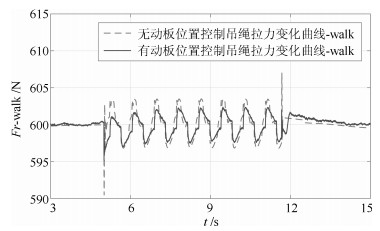
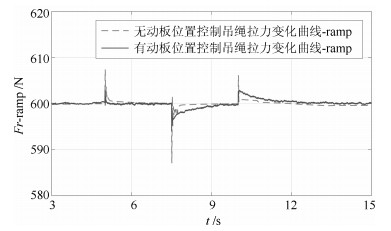
图 14 步行信号下吊绳拉力竖直方向分力变化曲线
Fig. 14 The vertical cable force during a ground walking signal
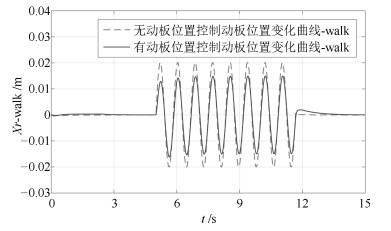
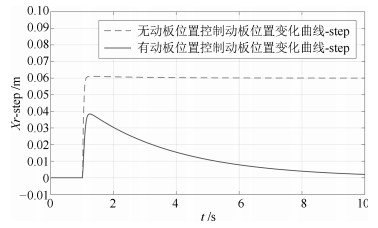
图 17 步行信号下动板2位置变化曲线
Fig. 17 The position of the moving plate 2 during a ground walking signal
表 1 仿真实验参数列表
Table 1 List of simulation parameters
物理量 符号 数值和单位 目标减重力 Fd 600 N 压簧劲度系数 Ks1 10 000 N/m 拉簧劲度系数 Ks2 5 000 N/m 吊架质量 M 20 kg 动板1质量 ml 1 kg 动板2质量 mr 1 kg  下载: 导出CSV
下载: 导出CSV
-
[1] 中华医学会神经病学分会神经康复学组, 中华医学会神经病学分会脑血管病学组, 卫生部脑卒中筛查与防治工程委员会办公室.中国脑卒中康复治疗指南.中国康复理论与实践, 2012, 18(4):301-318 http://cn.bing.com/academic/profile?id=985202343&encoded=0&v=paper_preview&mkt=zh-cnChinese Medical Association, National Health and Family Planning Commission. Stroke Screening and Prevention Engineering Committee. Guidelines for stroke rehabilitation in China. Chinese Journal of Rehabilitation Theory and Practice, 2012, 18(4):301-318 http://cn.bing.com/academic/profile?id=985202343&encoded=0&v=paper_preview&mkt=zh-cn [2] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [3] Riener R, Lünenburger L, Maier I C, Colombo G, Dietz V. Locomotor training in subjects with sensori-motor deficits:an overview of the robotic gait orthosis lokomat. Journal of Healthcare Engineering, 2010, 1(2):197-216 doi: 10.1260/2040-2295.1.2.197 [4] Werner C, von Frankenberg S, Treig T, Konrad M, Hesse S. Treadmill training with partial body weight support and an electromechanical gait trainer for restoration of gait in subacute stroke patients:a randomized crossover study. Stroke, 2002, 33(12):2895-2901 doi: 10.1161/01.STR.0000035734.61539.F6 [5] 冯治国.步行康复训练助行腿机器人系统[博士学位论文], 上海大学, 中国, 2009 http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252670.htmFeng Zhi-Guo. On Exoskeleton Robot for Gait Rehabilitation[Ph.D. dissertation], Shanghai University, China, 2009 http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252670.htm [6] 饶玲军, 谢叻, 朱小标.下肢外骨骼行走康复机器人研究与设计.机械设计与研究, 2012, 28(3):24-26 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012019685.htmRao Ling-Jun, Xie Le, Zhu Xiao-Biao. Research and design on lower exoskeleton rehabilitation robot. Machine Design and Research, 2012, 28(3):24-26 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012019685.htm [7] Riener R, Lünenburger L, Jezernik S, Anderschitz M, Colombo G, Dietz V. Patient-cooperative strategies for robot-aided treadmill training:first experimental results. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3):380-394 doi: 10.1109/TNSRE.2005.848628 [8] Patton J, Small S L, Zev Rymer W. Functional restoration for the stroke survivor:informing the efforts of engineers. Topics in Stroke Rehabilitation, 2008, 15(6):521-541 doi: 10.1310/tsr1506-521 [9] Winstein C J, Kay D B. Translating the science into practice:shaping rehabilitation practice to enhance recovery after brain damage. Progress in Brain Research, 2015, 218:331-360 doi: 10.1016/bs.pbr.2015.01.004 [10] Bejarano N C, Maggioni S, De Rijcke L, Cifuentes C A, Reinkensmeyer D J. Robot-assisted rehabilitation therapy:recovery mechanisms and their implications for machine design. Emerging Therapies in Neurorehabilitation II. Berlin:Springer, 2016. 197-223 [11] Klamroth-Marganska V, Blanco J, Campen K, Curt A, Dietz V, Ettlin T, Felder M, Fellinghauer B, Guidali M, Kollmar A, Luft A, Nef T, Schuster-Amft C, Stahel W, Riener R. Three-dimensional, task-specific robot therapy of the arm after stroke:a multicentre, parallel-group randomised trial. The Lancet Neurology, 2014, 13(2):159-166 doi: 10.1016/S1474-4422(13)70305-3 [12] Wyss D, Bartenbach V, Pennycott A, Riener R, Vallery H. A body weight support system extension to control lateral forces:realization and validation. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China:IEEE, 2014. 328-332 [13] Hidler J, Brennan D, Black I, Nichols D, Brady K, Nef T. ZeroG:Overground gait and balance training system. Journal of Rehabilitation Research & Development, 2011, 48(4):287-298 http://www.rehab.research.va.gov/jour/11/484/hidler484.html [14] Vallery H, Lutz P, von Zitzewitz J, Rauter G, Fritschi M, Everarts C, Ronsse R, Curt A, Bolliger M. Multidirectional transparent support for overground gait training. In:Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics (ICORR). Seattle, WA:IEEE, 2013. 1-7 [15] 蒋磊.基于扭绳驱动的上肢外骨骼康复训练机器人设计与控制[博士学位论文], 中国矿业大学(北京), 中国, 2014 http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371338.htmJiang Lei. Design and Control of An Exoskeleton Robot for Upper Limbs Using Twisted String Actuator[Ph.D. dissertation], China University of Mining and Technology, Beijing, China, 2014 http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371338.htm [16] 刘攀, 张立勋, 王克义, 张今瑜.绳索牵引康复机器人的动力学建模与控制.哈尔滨工程大学学报, 2009, 30(7):811-815 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907015.htmLiu Pan, Zhang Li-Xun, Wang Ke-Yi, Zhang Jin-Yu. Dynamic modeling and control of a wire-driven rehabilitation robot. Journal of Harbin Engineering University, 2009, 30(7):811-815 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907015.htm [17] 王启申, 李继婷.手康复机器人钢丝绳--绳套传动系统中的摩擦补偿.机器人, 2014, 36(1):1-7 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401001.htmWang Qi-Shen, Li Ji-Ting. Friction compensation in cable-conduit transmission system of hand rehabilitation robot. Robot, 2014, 36(1):1-7 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401001.htm [18] 禹润田, 方跃法, 郭盛.绳驱动并联踝关节康复机构设计及运动性能分析.机器人, 2015, 37(1):53-62 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htmYu Ren-Tian, Fang Yue-Fa, Guo Sheng. Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation. Robot, 2015, 37(1):53-62 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htm [19] Veneman J F, Kruidhof R, Hekman E E, Ekkelenkamp R, van Asseldonk E H, van der Kooij H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(3):379-386 doi: 10.1109/TNSRE.2007.903919 [20] 潘国新, 张秀峰, 李剑.偏瘫步行康复训练机器人减重支撑系统的研究.中国康复医学杂志, 2013, 28(11):1041-1045 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201311013.htmPan Guo-Xin, Zhang Xiu-Feng, Li Jian. Research of the body weight support system for treadmill training robot in hemiplegia rehabilitation. Chinese Journal of Rehabilitation Medicine, 2013, 28(11):1041-1045 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201311013.htm [21] 马关坡, 徐秀林.下肢康复训练减重支撑系统的研究现状.中国医学物理学杂志, 2014, 31(1):4694-4698 http://www.cnki.com.cn/Article/CJFDTOTAL-YXWZ201401023.htmMa Guan-Po, Xu Xiu-Lin. The research status of body weight support system of lower limbs rehabilitation training. Chinese Journal of Medical Physics, 2014, 31(1):4694-4698 http://www.cnki.com.cn/Article/CJFDTOTAL-YXWZ201401023.htm [22] Lu Q, Liang J X, Qiao B, Ma O. A new active body weight support system capable of virtually offloading partial body mass. IEEE/ASME Transactions on Mechatronics, 2013, 18(1):11-20 doi: 10.1109/TMECH.2011.2160555 [23] Veneman J F, Ekkelenkamp R, Kruidhof R, van der Helm F C T, van der Kooij H. A series elastic-and Bowden-cable-based actuation system for use as torque actuator in exoskeleton-type robots. The International Journal of Robotics Research, 2006, 25(3):261-281 doi: 10.1177/0278364906063829 [24] Vallery H, Veneman J, van Asseldonk E, Ekkelenkamp R, Buss M, van der Kooij H. Compliant actuation of rehabilitation robots. IEEE Robotics & Automation Magazine, 2008, 15(3):60-69 https://www.researchgate.net/publication/3344973_Compliant_actuation_of_rehabilitation_robots?_sg=3w1CdRP-SiYBo-QNfITGbslsyXEpBwkNXV9SUQ4is4nJvIGyUuxrVlrq-2Maxjkky1Xg9e7ITiyf9-WntZXULQ [25] Ma Bo-Jun, Fang Yong-Chun, Xiao Xiao. A sliding adaptive controller design for uncertain nonlinear system. In:Proceedings of the 2005 China Intelligent Automation Conference. Qingdao:Chinese Association of Automation, 2005. [26] 刘金琨, 孙富春.滑模变结构控制理论及其算法研究与进展.控制理论与应用, 2007, 24(3):407-418 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htmLiu Jin-Kun, Sun Fu-Chun. Research and development on theory and algorithms of sliding mode control. Control Theory & Applications, 2007, 24(3):407-418 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htm [27] 方彬, 沈林勇, 章亚男, 钱晋武.步行训练机器人主动减重控制方法.上海大学学报(自然科学版), 2011, 17(6):719-723 http://www.cnki.com.cn/Article/CJFDTOTAL-SDXZ201106005.htmFang Bin, Shen Lin-Yong, Zhang Ya-Nan, Qian Jin-Wu. Active control of body weight for gait training robot. Journal of Shanghai University (Natural Science), 2011, 17(6):719-723 http://www.cnki.com.cn/Article/CJFDTOTAL-SDXZ201106005.htm [28] 方勇纯, 卢桂章.非线性系统理论.北京:清华大学出版社, 2009. 82-87Fang Yong-Chun, Lu Gui-Zhang. Nonlinear System Theory. Beijing:Tsinghua University Press, 2009. 82-87 期刊类型引用(15)
1. 刘义鹏,曾东旭. 眼底数据频域增强算法. 小型微型计算机系统. 2024(01): 177-184 .  百度学术
百度学术2. 高云鹏,孟雪晴,张其旺,王庆凯,杨佳伟,董一隆. 基于深度宽卷积残差收缩网络的球磨机负荷状态诊断. 湖南大学学报(自然科学版). 2023(02): 102-111 . 百度学术3. 周阅昇,熊伟丽. 基于迁移成分分析的发酵过程集成软测量建模. 系统仿真学报. 2023(03): 623-631 . 百度学术4. 代伟,南静. 随机权神经网络增量构造学习方法研究进展. 控制与决策. 2023(08): 2231-2242 . 百度学术5. 潘福成,殷航,周晓锋,李帅,刘舒锐,贾冬妮. 基于自适应网络的球磨机负荷预测方法. 计算机集成制造系统. 2023(10): 3229-3238 . 百度学术6. 毛文涛,田思雨,窦智,张迪,丁玲. 一种基于深度迁移学习的滚动轴承早期故障在线检测方法. 自动化学报. 2022(01): 302-314 . 本站查看7. 范苍宁,刘鹏,肖婷,赵巍,唐降龙. 深度域适应综述:一般情况与复杂情况. 自动化学报. 2021(03): 515-548 . 本站查看8. 刘卓,汤健,柴天佑,余文. 基于多模态特征子集选择性集成建模的磨机负荷参数预测方法. 自动化学报. 2021(08): 1921-1931 . 本站查看9. 潘红光,宋浩骞,苏涛,马彪. 基于SVM的煤炭低位发热量软测量. 西安科技大学学报. 2021(06): 1130-1137 . 百度学术10. 巩师鑫,任怀伟,杜毅博,赵国瑞,文治国,周杰. 基于MRDA-FLPEM集成算法的综采工作面矿压迁移预测. 煤炭学报. 2021(S1): 529-538 . 百度学术11. 杜宇浩,阎高伟,李荣,王芳. 基于局部线性嵌入的测地线流式核多工况软测量建模方法. 化工学报. 2020(03): 1278-1287 . 百度学术12. 屈武,阎高伟. 集成最大均值差异正则约束的迁移子空间软测量. 重庆理工大学学报(自然科学). 2020(04): 108-114 . 百度学术13. 汤健,乔俊飞,刘卓,周晓杰,余刚,赵建军. 面向磨机负荷参数预测的多通道机械信号分析评估与优化组合. 北京工业大学学报. 2020(09): 997-1007 . 百度学术14. 来颜博,阎高伟,程兰,陈泽华. 基于动态独立成分分析和动态主成分分析的测地线流式核无监督回归模型. 上海交通大学学报. 2020(12): 1269-1277 . 百度学术15. 姜乐,周平. 优化增量型随机权神经网络及应用. 化工学报. 2019(12): 4710-4721 . 百度学术其他类型引用(22)
-


 下载:
下载:








计量
- 文章访问数: 2508
- HTML全文浏览量: 416
- PDF下载量: 850
- 被引次数: 37
