

Development of Wearable Power Assist Robot for Low Back Support Using Soft Pneumatic Actuators
-
摘要: 针对老龄化社会对于康复和看护助力搬运的需要,提出了用气压驱动器实现轻量、柔性助力、穿戴舒适的可穿戴式腰部助力机器人.机器人采用无外骨骼的结构设计,可以给护理人员在提升重物和静态保持作业时输出腰部所需助力,降低下腰痛(Low back pain,LBP)致病风险.通过对重物搬运作业中穿戴者竖脊肌表面肌电信号(Surface electromyography,sEMG)评估、基于测力平台最大搬举重量测试、静态弯腰负重作业下人体重心(Center of gravity,COG)移动轨迹等相关实验,验证了助力有效性.Abstract: With the rapid arrival of aging society, in order to meet the requirements on rehabilitation and transfer assist, we proposed a wearable power assist robot for low back support using soft pneumatic actuators which are lightweight, robust and powerful and especially safe for the interaction between man and machine. This non-exoskeleton type robot can provide low back with proper assist force during lifting or static holding tasks, and prevent the caregiver from suffering low back pain (LBP). The assistance effectiveness of the proposed device has been proven through related experiments, including assessing the electromyography (EMG) signal of the erector spinae muscles, measuring the maximum lift weight, and the track data of center of gravity (COG).
-
Key words:
- Wearable /
- power assist robot /
- soft pneumatic actuator /
- exoskeleton
-
-
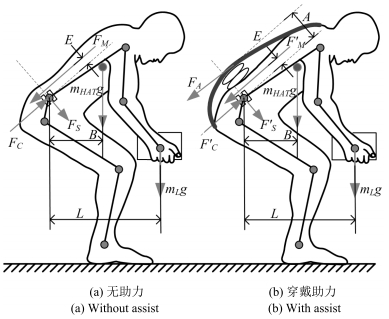
图 2 脊柱悬臂梁模型和助力机器人机理
Fig. 2 Cantilever model of spine and mechanism of power assist robot for low back support

图 7 背部竖脊肌表面肌电信号评估(负载: 12.6 kg)
Fig. 7 Evaluation by measuring sEMG signal of erector spinae muscles (loads: 12.6 kg)

图 10 脊柱稳定性需要主动肌-拮抗肌协同作用[34]
Fig. 10 Spine stability requires agonist-antagonist co-activation
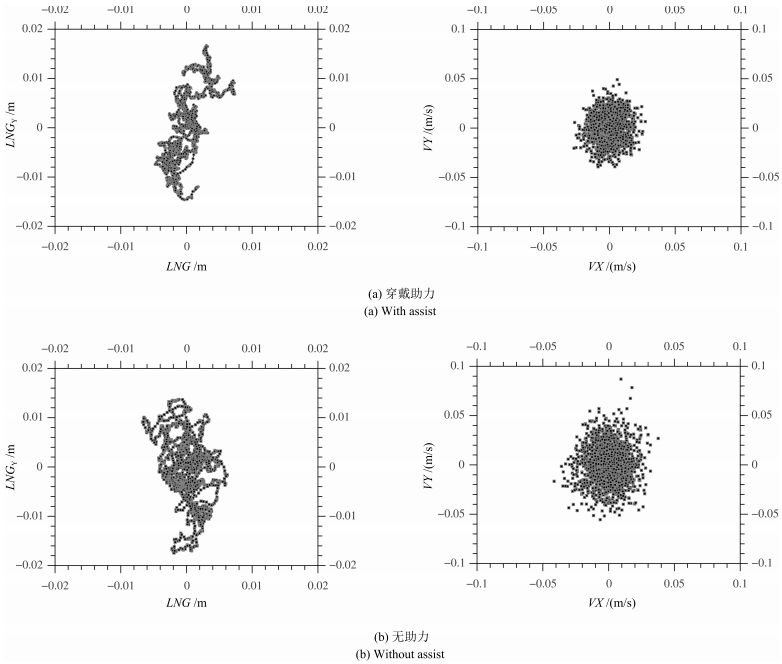
表 1 人体重心移动位移(m)
Table 1 The moving length of the COG (m)
Unit With assist Without assist LNGX 0.1919 0.2628 LNGY 0.332 0.4398 LNG 0.4186 0.5613  下载: 导出CSV
下载: 导出CSV
-
[1] 中华人民共和国国家统计局国家数据年度数据查询:人口年龄结构和抚养比[Online], available:http://data.stats.gov.cn/easyq-uery.htm?cn=C01, August 15, 2016National Bureau of Statistics of the People's Republic of China Annual Data Inquiry:Age Composition and Dependency Ratio of Population[Online], available:http://data.stats.gov.cn/easyquery.htm?cn=C01, August 15, 2016 [2] 陈佳丽, 白阳静.护理人员下腰痛的影响因素研究进展.护理学报, 2012, 19(7A):13-16 http://www.cnki.com.cn/Article/CJFDTOTAL-NFHL201213007.htmChen Jia-Li, Bai Yang-Jing. Impact factors of low back pain in nurses. Journal of Nursing (China), 2012, 19(7A):13-16 http://www.cnki.com.cn/Article/CJFDTOTAL-NFHL201213007.htm [3] 王田苗, 陶永, 陈阳.服务机器人技术研究现状与发展趋势.中国科学:信息科学, 2012, 42(9):1049-1066 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201209001.htmWang Tian-Miao, Tao Yong, Chen Yang. Research status and development trends of the service robotic technology. Scientia Sinica Informationis, 2012, 42(9):1049-1066 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201209001.htm [4] 张佳帆, 陈鹰, 杨灿军.柔性外骨骼人机智能系统.北京:科学出版社, 2011.Zhang Jia-Fan, Chen Ying, Yang Can-Jun. Flexible Exoskeleton Intelligent Man-machine System. Beijing:Science Press, 2011. [5] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and in-teractive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [6] 欧阳小平, 范伯骞, 丁硕.助力型下肢外骨骼机器人现状及展望.科技导报, 2015, 33(23):92-99 http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201523036.htmOuyang Xiao-Ping, Fan Bo-Qian, Ding Shuo. Status and prospects of the lower extremity exoskeleton robots for human power augmentation. Science and Technology Review, 2015, 33(23):92-99 http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB201523036.htm [7] Ishii M, Yamamoto K, Hyodo K. Stand-alone wearable power assist suit-development and availability. Journal of Robotics and Mechatronics, 2005, 17(5):575-583 doi: 10.20965/jrm.issn.1883-8049 [8] Sankai Y. HAL:hybrid assistive limb based on cybernics. Robotics Research. Berlin Heidelberg:Springer, 2011. 25-34 [9] Nabeshima C, Shingu M, Kawamoto H, Sankai Y. Risk management for wearable walking assistant robot:a case study of robot suit HAL for well-being. Journal of the Robotics Society of Japan, 2014, 32(4):380-385 doi: 10.7210/jrsj.32.380 [10] Kobayashi H, Shiiban T, Ishida Y. Realization of all 7 motions for the upper limb by a muscle suit. Journal of Robotics and Mechatronics, 2004, 16(5):504-512 doi: 10.20965/jrm.issn.1883-8049 [11] Muramatsu Y, Kobayashi H. Assessment of local muscle fatigue by NIRS-development and evaluation of muscle suit. ROBOMECH Journal, 2014, 1:19 doi: 10.1186/s40648-014-0019-2 [12] Chu A, Kazerooni H, Zoss A. On the biomimetic design of the Berkeley lower extremity exoskeleton (BLEEX). In:Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain:IEEE, 2005. 4345-4352 [13] Kazerooni H, Racine J L, Huang L H, Steger R. On the control of the Berkeley lower extremity exoskeleton (BLEEX). In:Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain:IEEE, 2005. 4353-4360 [14] 孙建, 余永, 葛运建, 陈峰, 沈煌焕.基于接触力信息的可穿戴型下肢助力机器人传感系统研究.中国科学技术大学学报, 2008, 38(12):1432-1438 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD200812013.htmSun Jian, Yu Yong, Ge Yun-Jian, Chen Feng, Shen Huang-Huan. Research on multi-sensors perceptual system of wearable power assist leg based on interaction force signal and joint angle signal. Journal of University of Science and Technology of China, 2008, 38(12):1432-1438 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD200812013.htm [15] 文忠, 钱晋武, 沈林勇, 章亚男.基于阻抗控制的步行康复训练机器人的轨迹自适应.机器人, 2011, 33(2):142-149 doi: 10.3724/SP.J.1218.2011.00142Wen Zhong, Qian Jin-Wu, Shen Lin-Yong, Zhang Ya-Nan. Trajectory adaptation for impedance control based walking rehabilitation training robot. Robot, 2011, 33(2):142-149 doi: 10.3724/SP.J.1218.2011.00142 [16] 杨巍, 张秀峰, 杨灿军, 吴海杰.基于人机5杆模型的下肢外骨骼系统设计.浙江大学学报(工学版), 2014, 48(3):430-435 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201403009.htmYang Wei, Zhang Xiu-Feng, Yang Can-Jun, Wu Hai-Jie. Design of a lower extremity exoskeleton based on 5-bar human machine model. Journal of Zhejiang University (Engineering Science), 2014, 48(3):430-435 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201403009.htm [17] 韩亚丽, 祁兵, 于建铭, 宋爱国, 朱松青.面向助力膝关节外骨骼的弹性驱动器研制及实验研究.机器人, 2014, 36(6):668-675 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201406005.htmHan Ya-Li, Qi Bing, Yu Jian-Ming, Song Ai-Guo, Zhu Song-Qing. Development and experimental study of elastic actuator for a power-assisted knee exoskeleton. Robot, 2014, 36(6):668-675 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201406005.htm [18] 陈昌铎, 韩建海, 李向攀.基于气动比例技术的下肢康复训练外骨骼机构控制.液压与气动, 2014, (6):63-66 http://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ201406017.htmChen Chang-Duo, Han Jian-Hai, Li Xiang-Pan. Exoskeleton control for lower limb rehabilitation training based on pneumatic proportion technology. Chinese Hydraulics and Pneumatics, 2014, (6):63-66 http://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ201406017.htm [19] Liao Y, Zhou Z H, Wang Q N. BioKEX:a bionic knee exoskeleton with proxy-based sliding mode control. In:Proceedings of the 2015 IEEE International Conference on Industrial Technology. Seville, Spain:IEEE, 2015. 125-130 [20] Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature, 2015, 521(7553):467-475 doi: 10.1038/nature14543 [21] Pfeifer R, Marques H G, Iida F. Soft robotics:the next generation of intelligent machines. In:Proceedings of the 23rd International Joint Conference on Artificial Intelligence. North America, 2013. 5-11 [22] Pfeifer R, Iida F, Lungarella M. Cognition from the bottom up:on biological inspiration, body morphology, and soft materials. Trends in Cognitive Sciences, 2014, 18(8):404-413 doi: 10.1016/j.tics.2014.04.004 [23] Warrior Web Task B:Advanced Technology Development[Online], available:https://www.fbo.gov/index?s=opportu-nity&mode=form&id=a70c14447eea6c974d7b1ab15b795ddf&tab, August 15, 2016 [24] Wehner M, Quinlivan B, Aubin P M, Martinez-Villalpando E, Baumann M, Stirling L, Holt K, Wood R, Walsh C. A lightweight soft exosuit for gait assistance. In:Proceedings of the 2013 International Conference on Robotics and Automation (ICRA). Karlsruhe, Germany:IEEE, 2013. 3362-3369 [25] Imamura Y, Tanaka T, Suzuki Y, Takizawa K, Yamanaka M. Motion-based-design of elastic material for passive assistive device using musculoskeletal model. Journal of Robotics and Mechatronics, 2011, 23(6):978-990 doi: 10.20965/jrm.issn.1883-8049 [26] Imamura Y, Tanaka T, Suzuki Y, Takizawa K, Yamanaka M. Analysis of trunk stabilization effect by passive power-assist device. Journal of Robotics and Mechatronics, 2014, 26(6):791-798 doi: 10.20965/jrm.issn.1883-8049 [27] Abdoli-Eramaki M, Stevenson J M, Reid S A, Bryant T J. Mathematical and empirical proof of principle for an on-body personal lift augmentation device (PLAD). Journal of Biomechanics, 2007, 40(8):1694-1700 doi: 10.1016/j.jbiomech.2006.09.006 [28] Abdoli-E M, Stevenson J M. The effect of on-body lift assistive device on the lumbar 3D dynamic moments and EMG during asymmetric freestyle lifting. Clinical Biomechanics, 2008, 23(3):372-380 doi: 10.1016/j.clinbiomech.2007.10.012 [29] Chaffin D B, Andersson G B J, Martin B J. Occupational Biomechanics (4th edition). New York:Wiley, 2006. [30] Schecter W S, Florian B, Margareta N. Biomechanics of the lumbar spine. Basic Biomechanics of the Musculoskeletal System (4th edition). Philadelphia:Lippincott Williams and Wilkins, 2012. 254-285 [31] Noritsugu T, Takaiwa M, Sasaki D. Development of power assist wear using pneumatic rubber artificial muscles. Journal of Robotics and Mechatronics, 2009, 21(5):607-613 doi: 10.20965/jrm.issn.1883-8049 [32] Chou C P, Hannaford B. Static and dynamic characteristics of McKibben pneumatic artificial muscles. In:Proceedings of the 1994 IEEE International Conference on Robotics and Automation. San Diego, CA:IEEE, 1994. 281-286 [33] Iwata K, Suzumori K, Wakimoto S. Development of contraction and extension artificial muscles with different braid angles and their application to stiffness changeable bending rubber mechanism by their combination. Journal of Robotics and Mechatronics, 2011, 23(4):582-588 doi: 10.20965/jrm.issn.1883-8049 [34] Liebenson C. Musculoskeletal myths. Journal of Bodywork and Movement Therapies, 2012, 16(2):165-182 doi: 10.1016/j.jbmt.2011.11.003 [35] Grew N D, Deane G. The physical effect of lumbar spinal supports. Prosthetics and Orthotics International, 1982, 6(2):79-87 https://www.ncbi.nlm.nih.gov/pubmed/6213930 [36] Cholewicki J, Reeves N P, Everding V Q, Morrisette D C. Lumbosacral orthoses reduce trunk muscle activity in a postural control task. Journal of Biomechanics, 2007, 40(8):1731-1736 doi: 10.1016/j.jbiomech.2006.08.005 -





计量
- 文章访问数: 3303
- HTML全文浏览量: 702
- PDF下载量: 1007
- 被引次数: 0
