

-
摘要: 针对助行机器人的柔顺性和安全性问题,基于多传感器系统融合技术,本文提出了一种能够兼具柔顺与安全的助行机器人运动控制方法.首先介绍了助行机器人的机械结构、控制原理以及多传感器系统,然后根据机器人多传感器系统,设计出各传感器相对应的用户意图估计方法,提出了一种基于多传感器融合的助行机器人柔顺运动控制算法.分析用户可能发生的跌倒模式,使用基于卡尔曼滤波(Kalman filter,KF)的序贯概率比检验(Sequential probability ratio test,SPRT)方法和决策函数来判断用户是否会跌倒,并判断处于哪种跌倒模式.最后,通过助行机器人柔顺运动控制实验和用户跌倒检测实验验证了算法的有效性.Abstract: Aimed at compliance and safety problems in motion control of walking-aid robot, a multi-sensor fusion based walking-aid robot motion control method with both compliance and safety is proposed. Firstly, the mechanism, control theory and multi-sensor system of the walking-aid robot are introduced. Then according to multi-sensor system, user motion intention estimation methods for each sensor are designed and a multi-sensor based compliance motion control for walking-aid robot is proposed. After analyzing user's possible falling modes, a Kalman filter (KF) based sequential probability ratio test (SPRT) method and decision function are used to detect the fall and falling mode. Finally, several compliance motion control experiments and fall detection experiments are described to show validity of the proposed algorithm.
-
Key words:
- Walking-aid robot /
- fall detection /
- force sensor /
- laser range finder /
- compliance
1) 本文责任编委 程龙 -
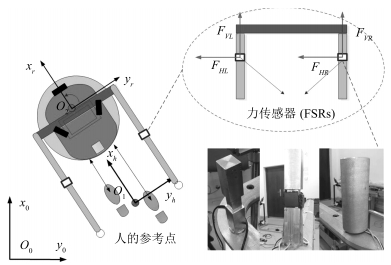
图 2 机器人坐标系系统和交互力的测量
Fig. 2 Robot coordinate system (top view) and measurement of interaction forces
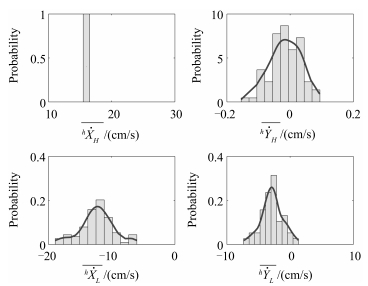
图 7 3个志愿者在向前跌倒时的意图速度分布图
Fig. 7 Distribution of intent velocities of three subjects during falling to forward
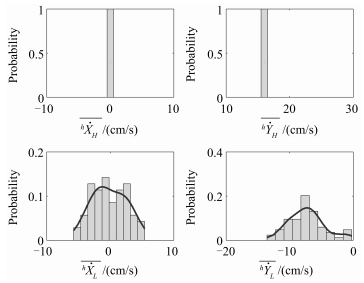
图 8 3个志愿者在向左跌倒时的意图速度分布图
Fig. 8 Distribution of intent velocities of three subjects during falling to left
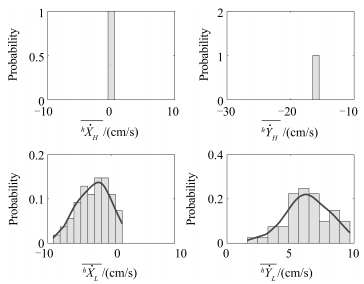
图 9 3个志愿者在向右跌倒时的意图速度分布图
Fig. 9 Distribution of intent velocities of three subjects during falling to right
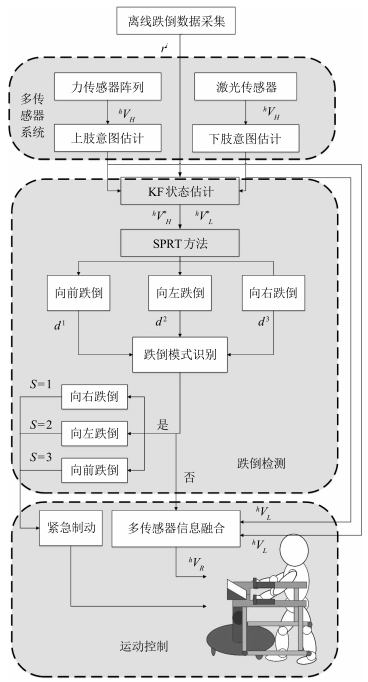
图 10 兼具柔顺与安全的助行机器人运动控制系统框图
Fig. 10 The system block diagram of the walking-aid robot motion control which has compliance and safety
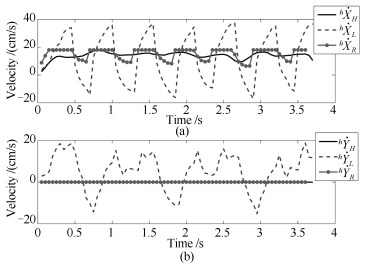
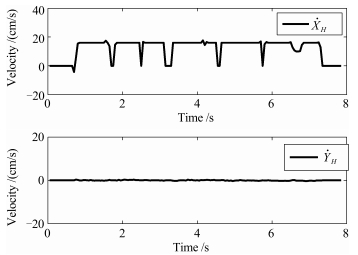
图 11 基于多传感器融合的用户意图速度实验1
Fig. 11 Multi-sensors based human intent velocities Experiment 1

图 12 基于多传感器融合的用户意图速度实验2
Fig. 12 Multi-sensors based human intent velocities Experiment 2
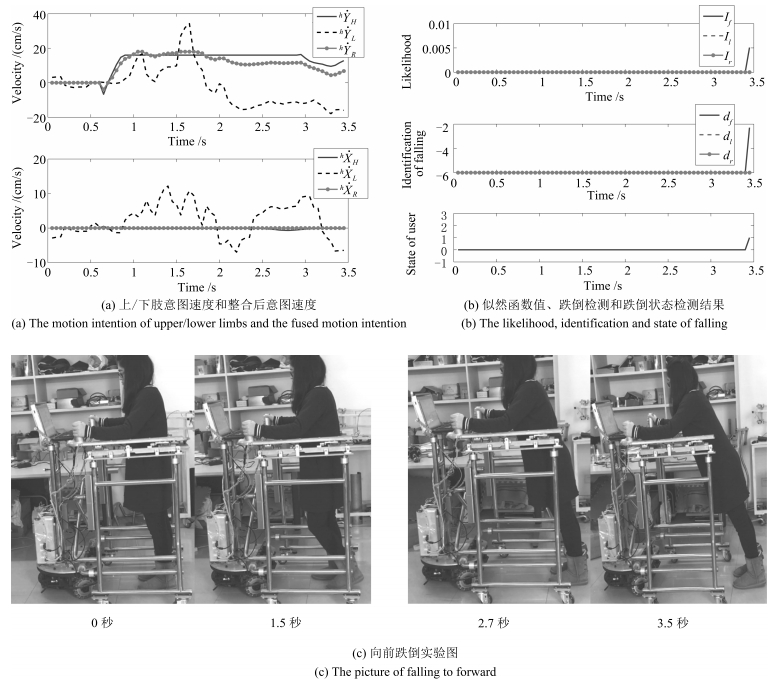
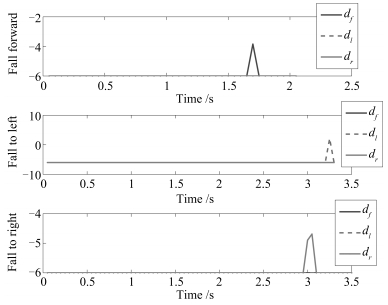
图 15 志愿者1向前跌倒仿真实验结果图
Fig. 15 Subject 1 fall detection experiment results of falling to forward
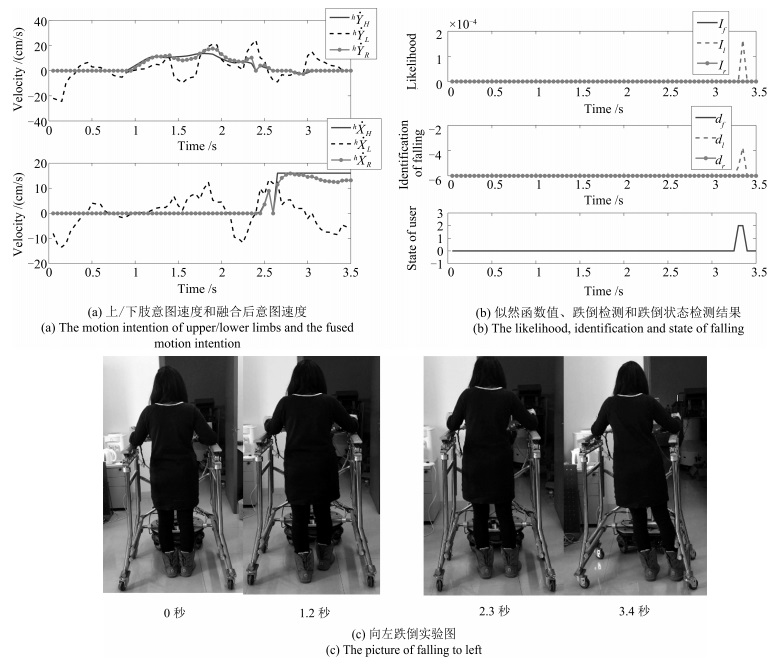
图 16 志愿者1向左跌倒仿真实验结果图
Fig. 16 Subject 1 fall detection experiment results of falling to left

图 17 志愿者1向右跌倒仿真实验结果图
Fig. 17 Subject 1 fall detection experiment results of falling to right
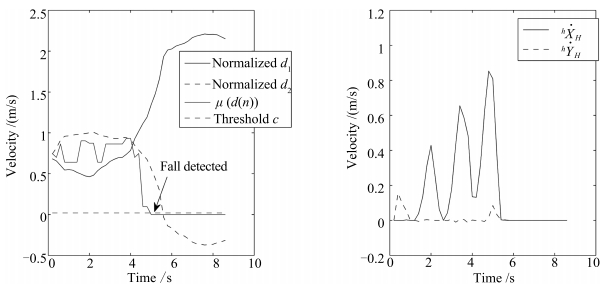
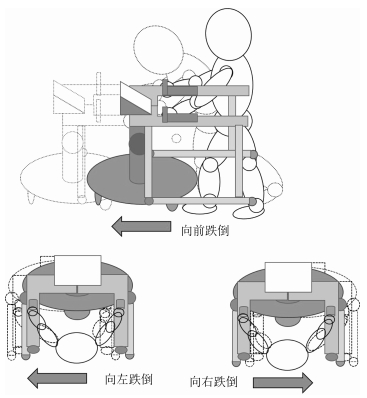
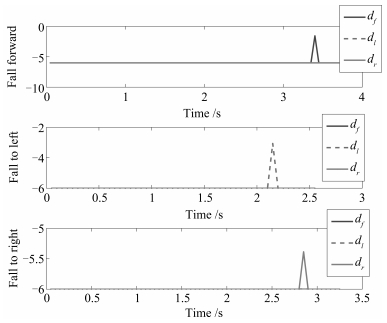
图 21 基于穿戴式传感器的助行机器人用户跌倒检测实验(向前跌倒)
Fig. 21 Wearable sensor based user fall detection experiment of walking-aid robot (fall forward)
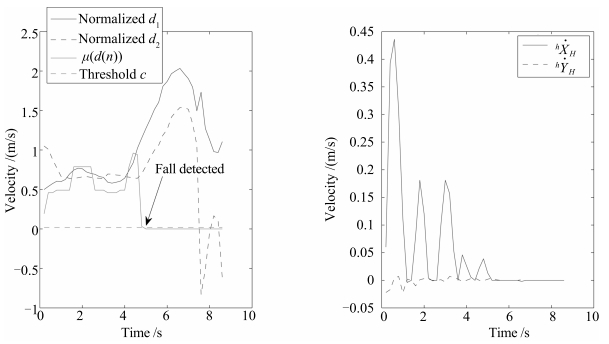
图 22 基于穿戴式传感器的助行机器人用户跌倒检测实验(向左跌倒)
Fig. 22 Wearable sensor based user fall detection experiment of walking-aid robot (fall to left)
表 1 3个志愿者在不同跌倒模式下的平均意图速度(cm/s)
Table 1 The intent velocities of three subjects in different falling modes (cm/s)
$\overline{{}{^h}{\dot{X}}_{H}}$ $\overline{{}{^h}{\dot{Y}}_{H}}$ $\overline{{}{^h}{\dot{Z}}_{H}}$ $\overline{{}{^h}{\dot{X}}_{L}}$ $\overline{{}{^h}{\dot{Y}}_{L}}$ A 向前 16 -0.031 0 -11.22 -2.40 向左 0 16 0 0.27 -7.82 向右 0 -16 0 -3.97 6.10 B 向前 16 0.051 0 -11.87 -2.09 向左 0.02 16 0 0.60 -5.83 向右 0 -16 0 -2.02 6.70 C 向前 16 -0.025 0 -13.95 -4.14 向左 0 16 0 -1.27 -8.32 向右 0 -16 0 -2.65 6.13  下载: 导出CSV
下载: 导出CSV
-
[1] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [2] 彭亮, 侯增广, 王卫群.康复机器人的同步主动交互控制与实现.自动化学报, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtmlPeng Liang, Hou Zeng-Guang, Wang Wei-Qun. Synchronous active interaction control and its implementation for a rehabilitation robot. Acta Automatica Sinica, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtml [3] 谭民, 王硕.机器人技术研究进展.自动化学报, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtmlTan Min, Wang Shuo. Research progress on robotics. Acta Automatica Sinica, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtml [4] Whitney D E. Resolved motion rate control of manipulators and human prostheses. IEEE Transactions on Man-Machine Systems, 1969, 10(2):47-53 doi: 10.1109/TMMS.1969.299896 [5] 殷跃红, 尉忠信, 朱剑英.机器人柔顺控制研究.机器人, 1998, 20(3):232-240 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR803.011.htmYin Yue-Hong, Wei Zhong-Xin, Zhu Jian-Ying. Compliance control of robot an overview. Robot, 1998, 20(3):232-240 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR803.011.htm [6] Shibata T, Murakami T. Power-assist control of pushing task by repulsive compliance control in electric wheelchair. IEEE Transactions on Industrial Electronics, 2012, 59(1):511-520 doi: 10.1109/TIE.2011.2146210 [7] Katsura S, Ohnishi K. Human cooperative wheelchair for haptic interaction based on dual compliance control. IEEE Transactions on Industrial Electronics, 2004, 51(1):221-228 doi: 10.1109/TIE.2003.821890 [8] Xu W X, Huang J, Wang Y J, Tao C J, Cheng L. Reinforcement learning-based shared control for walking-aid robot and its experimental verification. Advanced Robotics, 2015, 29(22):1463-1481 doi: 10.1080/01691864.2015.1070748 [9] Wannier T, Bastiaanse C, Colombo G, Dietz V. Arm to leg coordination in humans during walking, creeping and swimming activities. Experimental Brain Research, 2001, 141(3):375-379 doi: 10.1007/s002210100875 [10] Stephenson J L, Lamontagne A, De Serres S J. The coordination of upper and lower limb movements during gait in healthy and stroke individuals. Gait and Posture, 2009, 29(1):11-16 doi: 10.1016/j.gaitpost.2008.05.013 [11] Suzuki S, Hirata Y, Kosuge K, Onodera H. Walking support based on cooperation between wearable-type and cane-type walking support systems. In:Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Budapest, Hungary:IEEE, 2011. 122-127 [12] Huang J, Huo W G, Xu W X, Mohammed S, Amirat Y. Control of upper-limb power-assist exoskeleton using a human-robot interface based on motion intention recognition. IEEE Transactions on Automation Science and Engineering, 2015, 12(4):1257-1270 doi: 10.1109/TASE.2015.2466634 [13] Huang J, Tu X K, He J P. Design and evaluation of the RUPERT wearable upper extremity exoskeleton robot for clinical and in-home therapies. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(7):926-935 doi: 10.1109/TSMC.2015.2497205 [14] Wu J, Huang J, Wang Y J, Xing K X. Nonlinear disturbance observer-based dynamic surface control for trajectory tracking of pneumatic muscle system. IEEE Transactions on Control Systems Technology, 2014, 22(2):440-455 doi: 10.1109/TCST.2013.2262074 [15] Mirmahboub B, Samavi S, Karimi N, Shirani S. Automatic monocular system for human fall detection based on variations in silhouette area. IEEE Transactions on Biomedical Engineering, 2013, 60(2):427-436 doi: 10.1109/TBME.2012.2228262 [16] Litvak D, Zigel Y, Gannot I. Fall detection of elderly through floor vibrations and sound. In:Proceedings of the 30th Annual International Conference on Engineering in Medicine and Biology Society. Vancouver, British Columbia, Canada:IEEE, 2008. 4632-4635 [17] Cheng W C, Jhan D M. Triaxial accelerometer-based fall detection method using a self-constructing cascade-AdaBoost-SVM classifier. IEEE Journal of Biomedical and Health Informatics, 2013, 17(2):411-419 doi: 10.1109/JBHI.2012.2237034 [18] Karantonis D M, Narayanan M R, Mathie M, Lovell N H, Celler B G. Implementation of a real-time human movement classifier using a triaxial accelerometer for ambulatory monitoring. IEEE Transactions on Information Technology in Biomedicine, 2006, 10(1):156-167 doi: 10.1109/TITB.2005.856864 [19] Wu G. Distinguishing fall activities from normal activities by velocity characteristics. Journal of Biomechanics, 2000, 33(11):1497-1500 doi: 10.1016/S0021-9290(00)00117-2 [20] Williams G, Doughty K, Cameron K, Bradley D A. A smart fall and activity monitor for telecare applications. In:Proceedings of the 20th Annual International Conference on Engineering in Medicine and Biology Society. Hong Kong, China:IEEE, 1998. 1151-1154 [21] Degen T, Jaeckel H, Rufer M, Wyss S. SPEEDY:a fall detector in a wrist watch. In:Proceedings of the 7th IEEE International Symposium on Wearable Computers. White Plains, New York, USA:IEEE, 2003. 184-189 [22] Hirata Y, Muraki A, Kosuge K. Motion control of intelligent walker based on renew of estimation parameters for user state. In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China:IEEE, 2006. 1050-1055 [23] Hirata Y, Komatsuda S, Kosuge K. Fall prevention control of passive intelligent walker based on human model. In:Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France:IEEE, 2008. 1222-1228 [24] Huang J, Di P, Wakita K, Fukuda T, Sekiyama K. Study of fall detection using intelligent cane based on sensor fusion. In:Proceedings of the 2008 International Symposium on Micro-NanoMechatronics and Human Science. Nagoya, Japan:IEEE, 2008. 495-500 [25] Huang J, Xu W X, Mohammed S, Shu Z. Posture estimation and human support using wearable sensors and walking-aid robot. Robotics and Autonomous Systems, 2015, 73:24-43 doi: 10.1016/j.robot.2014.11.013 [26] Han R, Tao C J, Huang J, Wang Y J, Yan H P, Ma L F. Design and control of an intelligent walking-aid robot. In:Proceedings of the 6th International Conference on Modelling, Identification, and Control. Melbourne, VIC:IEEE, 2014. 53-58 [27] Li P, Kadirkamanathan V. Fault detection and isolation in non-linear stochastic systems-a combined adaptive Monte Carlo filtering and likelihood ratio approach. International Journal of Control, 2004, 77(12):1101-1114 doi: 10.1080/00207170412331293311 [28] Jebson P J L, Hayden R J. AO principles of fracture management. The Journal of the American Medical Association, 2008, 300(20):2432-2433 doi: 10.1001/jama.2008.703 [29] Lefebvre T, Xiao J, Bruyninckx H, De Gersem G. Active compliant motion:a survey. Advanced Robotics, 2005, 19(5):479-499 doi: 10.1163/156855305323383767 [30] Marsland S. Machine Learning:An Algorithmic Perspective. Boca Raton, FL, USA:Chapman and Hall/CRC, 2009. 356-359 [31] Kadirkamanathan V, Li P, Jaward M H, Fabri S G. Particle filtering-based fault detection in non-linear stochastic systems. International Journal of Systems Science, 2002, 33(4):259-265 doi: 10.1080/00207720110102566 -

 下载:
下载:





计量
- 文章访问数: 3343
- HTML全文浏览量: 476
- PDF下载量: 802
- 被引次数: 0
