

A Parallel Ankle Rehabilitation Mechanism and Its Performance AnalysisBased on 3-UPS/RRR
-
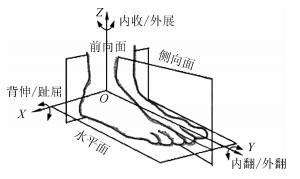
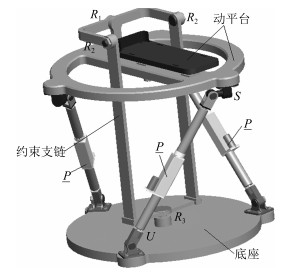
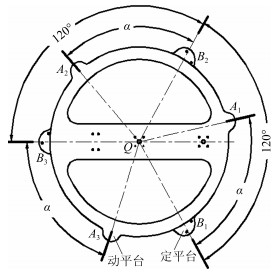
摘要: 基于踝关节的生理解剖结构和运动特性分析,提出了一种适用于踝关节康复的3自由度3-UPS/RRR并联机构.该机构采用三个主动支链倾斜布置避开了机构的奇异位形,能满足踝关节康复运动需要,同时约束支链和动平台的设计使机构的转动中心与患者的踝关节转动中心重合.应用解析法得到了机构的位置反解,建立了速度雅可比矩阵和静力雅可比矩阵,求解了机构的工作空间.基于雅可比矩阵,仿真分析了机构的运动学性能和静力学性能.结果表明在规定的工作空间内机构具有良好的可操作性、运动灵活性、刚度特性和力矩传递性能.最后运用牛顿-欧拉法建立了机构的逆动力学方程,得到了驱动力、约束力与运动参数的关系,并给出了仿真实例.Abstract: Based on the physiological anatomical structure and movement characteristics analysis of human ankle joint, a 3 degree of freedom (DoF) 3-UPS/RRR ankle rehabilitation parallel mechanism is presented. Its three active branched chain inclination arrangement avoids the singular configuration of the mechanism and meets the required ankle rehabilitation workspaces. By means of constraint branches and the moving platform, the mechanism center of rotations matches the patient's ankle center of rotations. Inverse kinematics is solved analytically velocity Jacobian matrix and statics Jacobian matrix are established, and mechanism workspace is coped with. Moreover, in view of Jacobian matrix, kinematics performance and statics performance of the mechanism are analyzed and simulated. The result shows that the mechanism is of favorable operability, flexibility, and stiffness characteristics, and its torque transmission is within the specified workspace. Lastly, inverse dynamics equations of the mechanism are modeled by Newton-Euler formulation; the relationship among driving forces, constraint forces and motion parameters are obtained. A computational example is provided.1) 本文责任编委 王卫群
-
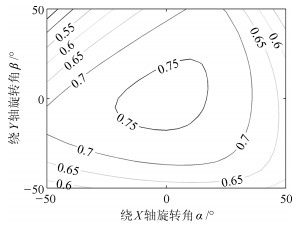
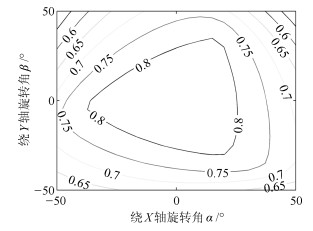
图 18 γ=-20°时机构的力矩传递性能
Fig. 18 The mechanism's torque transmission performance at γ=-20°
表 1 机构的结构参数
Table 1 The architectural parameters of the mechanism
参数 参数值 d d=0.2 m L3 L3=0.35 m A1 rTA1=(-d sin (π/15), d cos (π/15), -0.05)T A2 rT A 2=(-d cos (7π/30), -d sin (7π/30), -0.05)T A3 rT A 3=(d sin (2π/5), -d cos (2π/5), -0.05)T B1 rT B 1=(${\sqrt 3 d/2}$, d/2, -L3)T B2 rT B 2=(${-\sqrt 3 d/2}$, d/2, -L3)T B3 rT B 3=(0, -d, -L3)T  下载: 导出CSV
下载: 导出CSV
表 2 康复机构的运动范围
Table 2 The movement range of rehabilitation mechanism
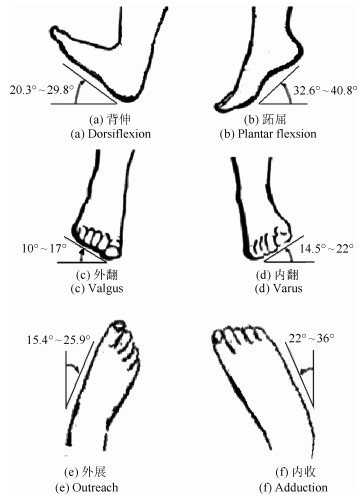
运动类型 运动旋转角度极值(°) 背伸 65 跖屈 80 内翻 75 外翻 80 内收 45 外展 70
下载: 导出CSV
-
[1] 姚太顺, 孟宪杰.踝关节外科.北京:中国中医药出版社, 1998. 21-36Yao Tai-Shun, Meng Xian-Jie. Ankle Surgery. Beijing:Traditional Chinese Medicine Press, 1998. 21-36( [2] Li D, Zhao T S, Bian H. Bio-syncretic mechanism system and its application in the rehabilitation engineering. In:Proceedings of the 2008 International Mechanisms and Machine Science Conference. Dalian, China, 2008. 28-31 [3] 焦爽, 闫汝蕴.本体感觉训练预防踝关节运动损伤研究进展.中国运动医学杂志, 2009, 28(6):713-716) http://www.cnki.com.cn/Article/CJFDTOTAL-YDYX200906033.htmJiao Shuang, Yan Ru-Yun. The research progress on prevention sports injury of ankle proprioception training. Chinese Journal of Sports Medicine, 2009, 28(6):713-716( http://www.cnki.com.cn/Article/CJFDTOTAL-YDYX200906033.htm [4] Girone M J, Burdea G C, Bouzit M. The "Rutgers Ankle" orthopedic rehabilitation interface. Proceedings of the ASME Haptics Symposium, 1999, 67:305-312 [5] Girone M, Burdea G, Bouzit M, Popescu V, Deutsch J E. A Stewart platform-based system for ankle telerehabilitation. Autonomous Robots, 2001, 10(2):203-212 doi: 10.1023/A:1008938121020 [6] Saglia J A, Tsagarakis N G, Dai J S, Caldwell D G. A high performance 2-Dof over-actuated parallel mechanism for ankle rehabilitation. In:Proceedings of the 2009 International Conference on Robotics and Automation. Kobe, Japan:IEEE, 2009. 2180-2186 [7] 于海波.并联式踝关节康复机器人系统设计[硕士学位论文], 燕山大学, 中国, 2006.) http://cdmd.cnki.com.cn/Article/CDMD-10216-2006066136.htmYu Hai-Bo. Design of System of Parallel Ankle Rehabilitation Device[Master dissertation], Yanshan University, China, 2006.( http://cdmd.cnki.com.cn/Article/CDMD-10216-2006066136.htm [8] Liu G Q, Gao J L, Yue H, Zhang X J, Lu G D. Design and kinematics analysis of parallel robots for ankle rehabilitation. In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China:IEEE, 2006. 253-258 [9] Wang C Z, Fang Y F, Guo S, Chen Y Q. Design and kinematical performance analysis of a 3-RUS/RRR redundantly actuated parallel mechanism for ankle rehabilitation. Journal of Mechanisms and Robotics, 2013, 5(3):041003-1-041003-11 [10] 边辉, 赵铁石, 田行斌, 李丹, 潘旺.生物融合式康复机构及其应用.机器人, 2010, 32(4):470-477) doi: 10.3724/SP.J.1218.2010.00470Bian Hui, Zhao Tie-Shi, Tian Xing-Bin, Li Dan, Pan Wang. Bio-syncretic rehabilitation mechanism and its application. Robot, 2010. 32(4):470-477( doi: 10.3724/SP.J.1218.2010.00470 [11] Leardini A, O'Connor J J, Catani F, Giannini S. Kinematics of the human ankle complex in passive flexion; a single degree of freedom system. Journal of Biomechanics, 1999, 32(2):111-118 doi: 10.1016/S0021-9290(98)00157-2 [12] Tsoi Y H, Xie S Q. Design and control of a parallel robot for ankle rehabilitation. International Journal of Intelligent Systems Technologies and Applications, 2010, 8(1-4):100-113 [13] 禹润田, 方跃法, 郭盛.绳驱动并联踝关节康复机构设计及运动性能分析.机器人, 2015, 37(1):53-62, 73) http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htmYu Run-Tian, Fang Yue-Fa, Guo Sheng. Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation. Robot, 2015, 37(1):53-62, 73( http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htm [14] Yiu Y K, Cheng H, Xiong Z H, Liu G F, Li Z X. On the dynamics of parallel manipulators. In:Proceedings of the 2001 IEEE International Conference on Robotics and Automation. Seoul, South Korea:IEEE, 2001. 146-154 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=933204 [15] Sen S, Dasgupta B, Mallik A K. Variational approach for singularity-free path-planning of parallel manipulators. Mechanism and Machine Theory, 2003, 38(11):1165-1183 doi: 10.1016/S0094-114X(03)00065-X [16] Bandyopadhyay S, Ghosal A. Analysis of configuration space singularities of closed-loop mechanisms and parallel manipulators. Mechanism and Machine Theory, 2004, 39(5):519-544 doi: 10.1016/j.mechmachtheory.2003.08.003 [17] 李剑锋, 李世才, 陶春静, 季润, 徐成辉, 张兆晶.并联2-UPS/RRR踝关节康复机构及运动性能分析.机器人, 2016, 38(2):144-153) http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602003.htmLi Jian-Feng, Li Shi-Cai, Tao Chun-Jing, Ji Run, Xu Cheng-Hui, Zhang Zhao-Jing. Parallel 2-UPS/RRR ankle rehabilitation mechanism and kinematic performance analysis. Robot, 2016, 38(2):144-153( http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201602003.htm [18] 汪满新, 黄田.面对称3-SPR并联机构的运动学分析与尺度综合.机械工程学报, 2013, 49(15):22-27) doi: 10.3901/JME.2013.15.022Wang Man-Xin, Huang Tian. Kinematics analysis and dimensional synthesis of a plane symmetric 3-SPR parallel manipulator. Journal of Mechanical Engineering, 2013, 49(15):22-27( doi: 10.3901/JME.2013.15.022 [19] 陈修龙, 高庆, 赵永生. 4-UPS-UPU并联坐标测量机的灵巧度研究.计算机集成制造系统, 2012, 18(6):1200-1208) http://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ201206011.htmChen Xiu-Long, Gao Qing, Zhao Yong-Sheng. Dexterity measures of 4-UPS-UPU parallel coordinate measuring machine. Computer Integrated Manufacturing Systems, 2012, 18(6):1200-1208( http://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ201206011.htm [20] 饶青, 白师贤. 6-6型Stewart机器人的可操作性分析及其定义.机器人, 1994, 16(6):345-349) http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR406.004.htmRao Qing, Bai Shi-Xian. Manipulability analysis and deeinition of 6-SPS stewart robot. Robot, 1994, 16(6):345-349( http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR406.004.htm [21] Yoshikawa T. Manipulability of robotic mechanisms. The International Journal of Robotics Research, 1985, 4(2):3-9 doi: 10.1177/027836498500400201 [22] Salisbury J K, Craig J J. Articulated hands:force control and kinematic issues. The International Journal of Robotics Research, 1982, 1(1):4-17 doi: 10.1177/027836498200100102 [23] 黄真, 孔令富, 方跃法.并联机器人机构学理论及控制.北京:机械工业出版社, 1997. 183-186)Huang Zhen, Kong Ling-Fu, Fang Yue-Fa. Parallel Robot Mechanism and Control Theories. Beijing:Machinery Industry Press, 1997. 183-186( [24] 熊有伦, 丁汉, 刘恩沧.机器人学.北京:机械工业出版社, 1993. 118-128)Xiong You-Lun, Ding Han, Liu En-Cang. Robotics. Beijing:Machinery Industry Press, 1993. 118-128( [25] 张新.一种3-UPS/S球面并联机构的运动参数优化研究[硕士学位论文], 燕山大学, 中国, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10216-1013028574.htmZhang Xin. Optimization of Motion Parameters of a 3-UPS/S Spherical Parallel Mechanism[Master dissertation], Yanshan University, China, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10216-1013028574.htm [26] 崔冰艳, 金振林.农业机器人新型肘关节的静力学性能分析.农业工程学报, 2011, 27(3):122-125 http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201103024.htmCui Bing-Yan, Jin Zhen-Lin. Analysis of statics performance for a novel elbow joint of agricultural robot. Transactions of the CSAE, 2011, 27(3):122-125 http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201103024.htm [27] 卿建喜, 李剑锋, 方斌.冗余驱动Tricept并联机构的驱动优化.机械工程学报, 2010, 46(5):8-14 doi: 10.3901/JME.2010.05.008Qing Jian-Xi, Li Jian-Feng, Fang Bin. Drive optimization of Tricept parallel mechanism with redundant actuation. Chinese Journal of Mechanical Engineering, 2010, 46(5):8-14 doi: 10.3901/JME.2010.05.008 [28] 冯志友, 张燕, 杨廷力, 张策.基于牛顿欧拉法的2UPS-2RPS并联机构逆动力学分析.农业机械学报, 2009, 40(4):193-197 http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200904042.htmFeng Zhi-You, Zhang Yan, Yang Ting-Li, Zhang Ce. Inverse dynamics of a 2UPS-2RPS parallel mechanism by Newton-Euler formulation. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(4):193-197 http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200904042.htm -

 下载:
下载:












图(22) / 表(2)
计量
- 文章访问数: 3082
- HTML全文浏览量: 540
- PDF下载量: 1195
- 被引次数: 0
