

-
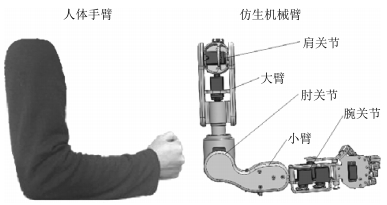
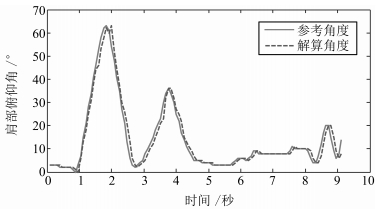
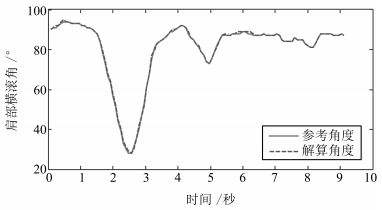
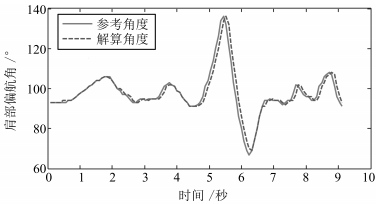
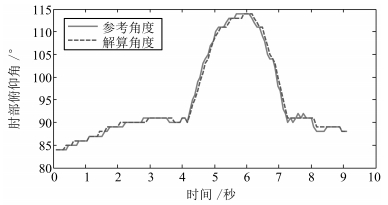
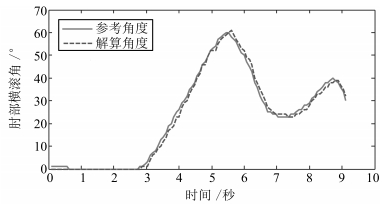
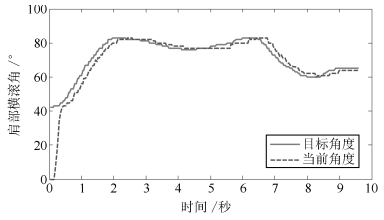
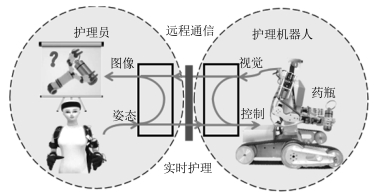
摘要: 设计了一种遥操作护理机器人系统,为实现从端同构式机器人的随动运动控制,对主端操作者人体姿态解算方法进行了研究.首先,构建由惯性传感单元构成的动作捕捉系统,对用作从端机器人动作指令的操作者人体姿态信息进行采集,采用四元数法对人体运动原始数据进行初步求解.其次,将四元数法得到的姿态数据解算成依据仿人结构设计的护理机器人各关节运动的目标姿态角,实现人体姿态到机器人动作的同构性映射.最后,为验证本文所提姿态解算方法的性能,设计了操作者控制护理机器人完成递送和拿取药瓶动作的实验.结果表明,本文姿态解算方法的解算性能与参考系统基本相同;在操作者动作姿态快速变化的时间段,系统仍可获得较高精度的目标姿态数据,其误差在动态条件下依旧能保持在2%以下;护理机器人可较好地实时复现操作者的人体动作.本文方法能满足机器人进行一般护理作业时对人体姿态数据处理的快速性和准确性要求.Abstract: This paper presents a telerobotic nursing system using inertial navigation information. In order to realize following control of the slave nursing robot, an attitude solution method is proposed for operator attitude in the master system. First, a motion capture system based on inertial units is built. To meet real-time demand, quaternion method with relatively low computation is performed in attitude solution for human data acquired from the master system, and then data fusion and compensation are conducted. Second, the attitude data obtained by quaternion method are further calculated as attitude of each joint of the slave robot with a humanoid structure, and thus an isomorphic motion mapping from human operator to slave robot is completed. Finally, experiments of taking and delivering bottle of the telerobotic system are described, and solution performance analysis on the attitude data from the master motion capture system are presented. The results show that there is a small measuring deviation with an absolute error less than 2% between the proposed method and the reference system. The attitude solving method can satisfy the requirements for fast and accurate attitude processing when the slave robot conducts a nursing task by following the nurse operator.
-
广义系统[1]的研究是从20世纪70年代[2]开始的, 在近40年的历史中广义系统理论研究得到了迅速发展, 并取得了一系列的丰硕成果[3-5].广义系统理论已成为现代控制理论中一个独立的研究领域, 这些研究成果主要集中在广义定常系统[6]、广义周期时变系统[7-8]和广义时变系统[9-10].随着科学技术的发展和工程技术的需要, 广义时变系统时域控制研究也受到了广泛的关注.
时域稳定性最早是由Kamenkov在文献[11]中提出来的, 至今已有很多可观的成果.文献[12-15]提出了时域稳定和时域有界的定义, 并对一般线性时变系统的时域稳定进行研究.文献[16-18]给出了带脉冲的线性时变系统的时域稳定的定义, 并利用 $L_{2}$ 增益给出时域稳定的判定定理.文献[19-22]探讨了带有干扰的参数不确定性系统时域稳定及时域控制的问题, 文献[23-24]利用微分矩阵不等式研究了一类带有跳变的线性时变系统的时域稳定. Ambrosino等研究了状态依赖时变脉冲动力系统的时域稳定性问题[25], 并在文献[26-29]中对时间依赖和状态依赖脉冲动力系统的时域稳定进行了对比和分析.文献[30-31]利用分段线性化将时变矩阵转化为一组标准的矩阵不等式, 解决了小区间内时变矩阵不等式的求解问题.时变脉冲系统中的研究方法多是时变系统与正常脉冲系统的自然推广, 文中所研究的广义时变脉冲系统不仅是时变脉冲系统的推广, 而且还考虑到广义系统自身的脉冲效应, 因此给研究和实验带来了一定的困难.
本文主要研究状态依赖广义时变脉冲系统的时域稳定问题.在考虑广义系统自身无脉冲效应的前提下, 运用微分矩阵不等式方法给出了广义时变脉冲系统时域稳定的充分条件, 并设计了状态反馈控制器.最后根据分段线性化将小区间内广义时变矩阵不等式转化为广义时不变线性矩阵不等式, 应用Matlab LMI工具箱编程进行求解.
1. 问题描述
$\boldsymbol{R} ^{n}$ 表示 $n$ -维欧几里得空间, $\boldsymbol{R}^{+}$ 是正实数集, $R > 0$ 是对称正定矩阵. ${N}$ 是自然数. $J=[t_0, t_0 +T]$ 表示时间域, 其中, $T \in \boldsymbol{R}^{+}$ .
考虑如下形式的状态依赖广义时变脉冲系统:
$ \begin{align} \left\{ \begin{array}{l} E\dot{{\boldsymbol x}}(t)=A(t){\boldsymbol x}(t), \quad {\boldsymbol x}(t)\notin \mathcal{S}_k\\ {\boldsymbol x}^{+}_{k}(t)=A_{d, k}{\boldsymbol x}(t), \quad {\boldsymbol x}(t)\in \mathcal{S}_k\\ {\boldsymbol x}(t_{0})={\boldsymbol x}_{0}, \quad k=1, 2, \cdot\cdot\cdot, N \end{array} \right. \end{align} $
(1) 其中, ${\boldsymbol x}(t)\in \boldsymbol{R}^{n}$ 为状态向量; $A(\cdot):t\in \boldsymbol{R}^{+}\mapsto \boldsymbol{R}^{n\times n}$ 是连续的函数矩阵, $A_{d, k}\in \boldsymbol{R}^{n\times n}, k=1, 2, \cdot\cdot\cdot, {N} $ 是时不变矩阵; $E$ 为奇异矩阵; ${S}_{k}\subseteq \boldsymbol{R}^{n}, k=1, 2, \cdot\cdot\cdot, {N}$ 是单连通互不相交的跳变集合 $({\boldsymbol x}_{0}\notin \mathcal{S}_{k})$ .根据脉冲时刻定义如下跳变时间集合:
$ \mathcal{T}_{x(\cdot)}=\{t\in \boldsymbol{R}^{+}|{\boldsymbol x}(t)\in \mathcal{S}_{k}, k=1, 2, \cdot\cdot\cdot, {N}\} $
定义1.如果 ${\boldsymbol x}_{0}^{\rm T}E^{\rm T}R{\boldsymbol x}_{0}\leq c_{1}$ 推出 ${\boldsymbol x}^{\rm T}(t)E^{\rm T}\Gamma(t){\boldsymbol x}(t) < c_{1}$ , 对 $\forall t\in J$ , 则称系统 (1) 是对于 $(c_1, J, R, \Gamma(\cdot))$ 时域稳定的.其中 $c_{1}>0, R$ 是对称正定矩阵, $\Gamma(\cdot)$ 是定义在 $J$ 上的函数矩阵, $\Gamma(t_0) < R$ .
定义2.如果存在常数 $s$ 对于任意 $t\in J$ 使得 $\det (sE-A(t)) \neq 0$ , 则广义时变系统 $E\dot{{\boldsymbol x}}(t)=A(t){\boldsymbol x}(t)$ 是一致正则的.
系统 (1) 一致正则与Campbell意义下的解析可解是等价的, 广义时变系统的一致正则性和 $A(t)$ 的连续性保证了其解的存在唯一性, 下面的讨论假定系统是一致正则的.我们将系统作如下分解:
$ \begin{align*} &MEN\!=\!\left[\begin{array}{ccc} I&0\\0&0 \end{array}\right], MA(t)N\!=\!\left[\begin{array}{ccc} A_{11}(t)& A_{12}(t)\\A_{21}(t)& A_{22}(t)\end{array}\right]\\ &N^{-1}{\boldsymbol x}(t)=\left[\begin{array}{ccc}{\boldsymbol x}_{1}(t)& {\boldsymbol x}_{2}(t)\end{array}\right]\end{align*} $
其中, $M, N$ 均为可逆矩阵, 则系统 (1) 等价于如下系统:
$ \begin{align*} \begin{aligned} &\dot{{\boldsymbol x}}_{1}(t)=A_{11}(t){\boldsymbol x}_{1}(t)+A_{12}(t) {\boldsymbol x}_{2}(t)\\ &0 = A_{21}(t) {\boldsymbol x}_{1}(t)+A_{22}(t){\boldsymbol x}_{2}(t) \end{aligned} \end{align*} $
显然, 系统 (1) 对于任意初始条件无脉冲的充要条件是 $A_{22}(t)$ 可逆.
另外考虑一类带有外部干扰的状态依赖广义时变脉冲系统
$ \begin{align} \left\{ \begin{array}{l} E\dot{{\boldsymbol x}}(t)=A(t){\boldsymbol x}(t)+G(t){\boldsymbol\omega}(t), \quad {\boldsymbol x}(t)\notin \mathcal{S}_k\\ {\boldsymbol x}^{+}_{k}(t)=A_{d, k}{\boldsymbol x}(t), \quad {\boldsymbol x}(t)\in \mathcal{S}_k\\ {\boldsymbol x}(t_{0})={\boldsymbol x}_{0}, \quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} \right. \end{align} $
(2) 外部干扰 ${\boldsymbol \omega}(t)$ 满足:
$ \begin{align} \begin{array}{l} \int_{t_0}^{t_0 +T}{\boldsymbol \omega}^{\rm T}(s){\boldsymbol \omega}(s){\rm d}s\leq d, \quad d\geq 0 \end{array} \end{align} $
(3) 定义3.如果 ${\boldsymbol x}_{0}^{\rm T}E^{\rm T}R{\boldsymbol x}_{0}\leq c_{1}$ 推出 ${{\boldsymbol{x}}^{\text{T}}}(t){{E}^{\text{T}}}\Gamma (t)\boldsymbol{x}(t) < {{c}_{2}}$ , 对 $\forall t\in J$ , 则称系统 (2) 是对于 $(c_1, c_2, {\boldsymbol \omega(t)}, J, R, \Gamma(\cdot))$ 时域稳定的.其中 $0 < c_{1} < c_{2}, R$ 是对称正定矩阵, $\Gamma(\cdot)$ 是定义在 $J$ 上的函数矩阵, $\Gamma(t_0) < R$ , 外部干扰 ${\boldsymbol \omega}(t)$ 满足式 (3).
2. 时域稳定性分析
本节分别对系统 (1) 和 (2) 给出时域稳定的充分条件.
定理1.对于系统 (1), 如果存在分段连续可微对称非奇异函数矩阵 $P(\cdot)$ 在 $J$ 上满足下列一组矩阵不等式, $\forall t\in J$ .
$ E^{\rm T}P(t)=P^{\rm T}(t)E\geq 0 $
(4a) $ A^{\rm T}(t)P(t)+P^{\rm T}(t)A(t)+E^{\rm T}\dot{P}(t) < 0 $
(4b) $ \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}-E^{\rm T}P(t) < 0\\ \qquad {\boldsymbol x}(t)\in \mathcal{S}_k, \qquad k=1, 2, \cdot\cdot\cdot, {N} \end{array} $
(4c) $ E^{\rm T}\Gamma(t)\leq E^{\rm T}P(t)\leq E^{\rm T}P(t_0) < E^{\rm T}R $
(4d) 则称系统 (1) 对于 $(c_1, J, R, \Gamma(\cdot))$ 时域稳定.
证明. 由定理条件 (4a) 和下式
$ \begin{align*} M^{\rm -T}P(t)N=\left[\begin{array}{cc}P_{1}(t)&P_{2}(t)\\ P_{3}(t)&P_{4}(t)\end{array}\right] \end{align*} $
有 $P_2(t)=0$ 和 $P_1(t)$ 对称, 将条件 (4b) 进行分解可得:
$ \begin{align*} \begin{aligned} &N^{\rm T}A^{\rm T}(t)M^{\rm T}M^{\rm -T}P(t)N +\\ &\quad N^{\rm T}P^{\rm T}(t)M^{-1}MA(t)N+\\ &\quad N^{\rm T}E^{\rm T}M^{\rm T}M^{\rm -T}\dot{P}(t)N =\\ &\quad \left[\begin{array}{cc}A_{11}^{\rm T}(t)&A_{21}^{\rm T}(t)\\A_{12}^{\rm T}(t)&A_{22}^{\rm T}(t)\end{array}\right]\left[\begin{array}{cc}P_{1}(t)&P_{2}(t)\\P_{3}(t)&P_{4}(t)\end{array}\right]+\\ &\quad \left[\begin{array}{cc}P_{1}^{\rm T}(t)&P_{3}^{\rm T}(t)\\P_{2}^{\rm T}(t)&P_{4}^{\rm T}(t)\end{array}\right]\left[\begin{array}{cc}A_{11}(t)&A_{12}(t)\\A_{21}(t)&A_{22}(t)\end{array}\right]+\\ &\quad \left[\begin{array}{cc}I&0\\0&0\end{array}\right]\left[\begin{array}{cc}\dot{P}_{1}(t)&\dot{P}_{2}(t)\\ \dot{P}_{3}(t)&\dot{P}_{4}(t)\end{array}\right]=\\ &\quad \left[\begin{array}{cc}\ast&\ast\\\ast&A_{22}^{\rm T}(t)P_{4}(t)+P_{4}^{\rm T}(t)A_{22}(t)\end{array}\right] < 0 \end{aligned} \end{align*} $
由上式显然有 $A_{22}^{\rm T}(t)P_{4}(t)+P_{4}^{\rm T}(t)A_{22}(t) < 0$ .因此, $A_{22}(t)$ 可逆, 系统对任意初始状态无脉冲.
构造下列广义Lyapunov函数
$ \begin{align*} V(t, {\boldsymbol x})={\boldsymbol x}^{\rm T}(t)E^{\rm T}P(t){\boldsymbol x}(t) \end{align*} $
当 $t\notin \mathcal{T}_{x(\cdot)}$ , 即系统状态向量 ${\boldsymbol x}(t)$ 没有达到跳变集合.则对 $V(t, {\boldsymbol x})$ 求导:
$ \begin{align*} &\dot V(t, {\boldsymbol x})={\boldsymbol x}^{\rm T}(t)[A^{\rm T}(t)P(t)+P^{\rm T}(t)A(t)+\\ &\qquad E^{\rm T}\dot{P}(t)]{\boldsymbol x}(t) \end{align*} $
由条件 (4b) 可知 $\dot V(t, {\boldsymbol x})< 0$ .
然而当 $t\in\mathcal{T}_{x(\cdot)}$ , 即系统依赖状态发生跳变, 由条件 (4c) 可得:
$ \begin{align*} & V (t, {\boldsymbol x}^+_k)-V (t, {\boldsymbol x})={\boldsymbol x}^{\rm T}(t)\times\\ & \qquad [A_{d, k}^{\rm T}E^{\rm T}P (t) A_{d, k}-E^{\rm T}P (t)]{\boldsymbol x}(t) < 0 \end{align*} $
则可以推出 $V(t, {\boldsymbol x})$ 在 $J$ 上是严格递减的.
对于系统 (1) 给定初始条件 $t_0$ 使得 ${\boldsymbol x}_{0}^{\rm T}E^{\rm T}R{\boldsymbol x}_{0}\leq c_{1}$ , 对所有的 $t\in J$ 都有:
$ \begin{align*} \begin{aligned} {\boldsymbol x}^{\rm T}(t)E^{\rm T}\Gamma(t){\boldsymbol x}(t)&\leq {\boldsymbol x}^{\rm T}(t)E^{\rm T}P(t){\boldsymbol x}(t)\leq\\ & {\boldsymbol x}_{0}^{\rm T}E^{\rm T}P(t_0){\boldsymbol x}_{0} < \\ &{\boldsymbol x}_{0}^{\rm T}E^{\rm T}RE{\boldsymbol x}_{0} < c_1 \end{aligned} \end{align*} $
因此系统 (1) 对于 $(c_1, J, R, \Gamma(\cdot))$ 时域稳定.
定理2.对于系统 (2), 如果存在分段连续可微对称非奇异函数矩阵 $P(\cdot)$ 在 $J$ 上满足下列不等式, $\forall t\in J$ .
$ E^{\rm T}P(t)=P^{\rm T}(t)E\geq 0 $
(5a) $ \begin{bmatrix} \Pi(t)&P^{\rm T}(t)G(t)\\ G^{\rm T}(t)P(t)&-I \end{bmatrix}< 0 $
(5b) $ \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}-E^{\rm T}P(t)< 0\\ \qquad {\boldsymbol x}(t)\in \mathcal{S}_k, \qquad k=1, 2, \cdot\cdot\cdot, {N} \end{array} $
(5c) $ E^{\rm T}\Gamma(t)\leq E^{\rm T}P(t)\leq E^{\rm T}P(t_0) < E^{\rm T}R $
(5d) 则称系统 (2) 是对于 $(c_1, c_2, {\boldsymbol \omega}(t), J, R, \Gamma(\cdot))$ 时域稳定的.其中
$ \begin{align*} \Pi(t)=A^{\rm T}(t)P(t)+P^{\rm T}(t)A(t)+E^{\rm T}\dot{P}(t) \end{align*} $
证明.由条件 (5b) 可知 $\Pi(t) < 0$ , 同理可证系统 (2) 对任意初始状态无脉冲.
考虑下列广义Lyapunov函数
$ \begin{align*} V(t, {\boldsymbol x})={\boldsymbol x}^{\rm T}(t)E^{\rm T}P(t){\boldsymbol x}(t) \end{align*} $
当 $t\notin \mathcal{T}_{x(\cdot)}$ , 即系统状态向量 ${\boldsymbol x}(t)$ 没有达到跳变集合.则对 $V(t, {\boldsymbol x})$ 求导:
$ \begin{align*} \begin{array}{l} \dot V(t, {\boldsymbol x})={\boldsymbol x}^{\rm T}(t)\Pi(t){\boldsymbol x}(t)+{\boldsymbol \omega}^{\rm T}(t)G^{\rm T}(t)P(t)\times\\ {\boldsymbol x}(t)+{\boldsymbol x}^{\rm T}(t)P^{\rm T}(t)G(t){\boldsymbol \omega}(t) \end{array} \end{align*} $
构造下列向量
$ \begin{align*} {\boldsymbol z}(t)=\left[\begin{array}{c}{\boldsymbol x}(t)\\ {\boldsymbol \omega}(t) \end{array}\right] \end{align*} $
由式 (5b) 得:
$ \begin{array}{lll} {\boldsymbol z}^{\rm T}(t) \left[\begin{array}{cc}\Pi(t)&P^{\rm T}(t)G(t)\\ G^{\rm T}(t)P(t)&-I\end{array}\right]{\boldsymbol z}(t)=\\ \quad \dot V(t, {\boldsymbol x})-{\boldsymbol \omega}^{\rm T}(t){\boldsymbol \omega}(t) < 0 \end{array} $
显然有:
$ \begin{align*} \dot V(t, {\boldsymbol x}) < {\boldsymbol \omega}^{\rm T}(t){\boldsymbol \omega}(t) \end{align*} $
对上式在 $[t_0, t]$ 上求积分得:
$ \begin{align*} \int_{t_0}^{t}\dot V(s, {\boldsymbol x}){\rm d}s < \int_{t_0}^{t}{\boldsymbol \omega}^{\rm T}(s){\boldsymbol \omega}(s){\rm d}s \end{align*} $
则
$ \begin{align*} \begin{aligned} V(t, {\boldsymbol x})& < V(t_0, {\boldsymbol x})+\int_{t_0}^{t}{\boldsymbol \omega}^{\rm T}(s){\boldsymbol \omega}(s){\rm d}s < \\ &{\boldsymbol x}_{0}^{\rm T}E^{\rm T}P(t_0){\boldsymbol x}_{0}+d < \\ &{\boldsymbol x}_{0}^{\rm T}E^{\rm T}R{\boldsymbol x}_{0}+d < \\ &c_1+d \end{aligned} \end{align*} $
当 $t\in\mathcal{T}_{x(\cdot)}$ , 即系统状态发生跳变
$ \begin{align*} \begin{aligned} V(t, {\boldsymbol x}^+)&= {\boldsymbol x}^{\rm T}(t)A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}{\boldsymbol x}(t)< \\ &{\boldsymbol x}^{\rm T}(t)E^{\rm T}P(t){\boldsymbol x}(t) < V(t, {\boldsymbol x}) < \\ &c_1+d \end{aligned} \end{align*} $
则 $\exists c_2>c_1$ 使得 $V(t, {\boldsymbol x})$ 在 $J$ 上有 $V(t, {\boldsymbol x}) < c_2$ .
对系统 (2) 给定初始条件 $t_0$ 使得 ${\boldsymbol x}_{0}^{\rm T}E^{\rm T}R{\boldsymbol x}_{0}\leq c_{1}$ , 对所有的 $t\in J$ 都有:
$ \begin{align*} {\boldsymbol x}^{\rm T}(t)E^{\rm T}\Gamma (t){\boldsymbol x}(t)\leq {\boldsymbol x}^{\rm T}(t)E^{\rm T}P(t){\boldsymbol x}(t) < c_2\end{align*} $
则称系统 (2) 对于 $(c_1, c_2, {\boldsymbol\omega}(t), J, R, \Gamma(\cdot))$ 时域稳定.
接下来应用S-procedure理论[30]进一步研究系统 (1) 和系统 (2) 的时域稳定.
引理1[25].存在一个连续闭集 $\mathcal{S}\subseteq \boldsymbol{R}^n$ 、对称矩阵 $Q_0\in \boldsymbol{R}^{n\times n}$ 、 $Q_i\in \boldsymbol{R}^{n\times n}$ 满足:
$ {\boldsymbol x}^{\rm T}(t)Q_{0}{\boldsymbol x}(t) < 0, \quad {\boldsymbol x}(t)\in \mathcal{S} $
(6a) $ {\boldsymbol x}^{\rm T}(t)Q_{i}{\boldsymbol x}(t) < 0, \quad {\boldsymbol x}(t)\in \mathcal{S}, \quad i=1, \cdot\cdot\cdot, p $
(6b) 则一定存在非负标量 $c_i, i=1, \cdot\cdot\cdot, p$ , 使得:
$ \begin{align} Q_0-\sum_{i=1}^{p}c_iQ_i < 0 \end{align} $
(6c) 显然条件 (6c) 可以推出条件 (6a). S-procedure就是通过判断条件 (6c) 的可行性来验证条件 (6a) 是否成立的.一般来说, 条件 (6c) 比条件 (6a) 更容易检验.所以, 通过应用S-procedure理论可以找到检验 (6a) 成立的更有效的方法.
由引理1的结论, 考虑条件 (4c), 当给定 $k$ 时, 令
$ \begin{align*} \begin{array}{l} Q_0=A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}-E^{\rm T}P(t), \quad \mathcal{S}=\mathcal{S}_k \end{array} \end{align*} $
则条件 (4c) 等价于如下不等式:
$ \begin{align*} \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}- E^{\rm T}P(t)-\sum\limits_{i=1}^{p}c_{i, k}(t)Q_{i, k} < 0 \end{array} \end{align*} $
于是可以推出如下定理.
定理3.如果存在对称矩阵集合 $Q_{i, k}, i=1, \cdot\cdot\cdot, p_k, k=1, \cdot\cdot\cdot, {N}$ 满足引理1条件, 并且存在一个连续可微对称非奇异函数矩阵 $P(\cdot)$ 和非负标量 $c_{i, k}(\cdot)\geq 0 $ 有:
$ E^{\rm T}P(t)=P^{\rm T}(t)E\geq 0 $
(7a) $ A^{\rm T}(t)P(t)+P^{\rm T}(t)A(t)+E^{\rm T}\dot{P}(t) < 0 $
(7b) $ \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}- E^{\rm T}P(t)-\sum\limits_{i=1}^{p}c_{i, k}(t)Q_{i, k}<0\\ \qquad {\boldsymbol x}(t)\in \mathcal{S}_k, \quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} $
(7c) $ E^{\rm T}\Gamma(t)\leq E^{\rm T}P(t)\leq E^{\rm T}P(t_0)< E^{\rm T}R $
(7d) 成立, 则系统 (1) 对于 $(c_1, J, R, \Gamma(\cdot))$ 时域稳定.其中 $J=[t_0\quad t_0 +T]$ .
注1.由引理1知定理3的条件有利于这类问题的求解.在定理1中, 跳变时需要解无穷多个矩阵不等式, 而在定理3中, 跳变时只需解在指定集合上的有限个矩阵不等式.同理, 由定理2可以推出如下定理.
定理4.如果存在对称矩阵集合 $Q_{i, k}, i=1, \cdot\cdot\cdot, p_k, k=1, \cdot\cdot\cdot, {N}$ 满足引理1条件, 并且存在一个连续可微对称非奇异函数矩阵 $P(\cdot)$ 和非负标量 $c_{i, k}(\cdot)\geq 0$ 有:
$ E^{\rm T}P(t)=P^{\rm T}(t)E\geq 0 $
(8a) $ \begin{bmatrix} \Pi(t)&P^{\rm T}(t)G(t)\\ G^{\rm T}(t)P(t)&-I \end{bmatrix} < 0 $
(8b) $ \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}P(t)A_{d, k}-E^{\rm T}P(t)-\sum\limits_{i=1}^{p}c_{i, k}(t)Q_{i, k} < 0\\ \qquad {\boldsymbol x}(t)\in \mathcal{S}_k, \quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} $
(8c) $ E^{\rm T}\Gamma(t)\leq E^{\rm T}P(t)\leq E^{\rm T}P(t_0) < E^{\rm T}R $
(8d) 成立, 则称系统 (2) 对于 $(c_1, c_2, {\boldsymbol \omega}(t), J, R, \Gamma(\cdot))$ 时域稳定.其中 $\Pi(t)$ 与定理2相同.
3. 时域控制器设计
考虑如下状态依赖广义时变脉冲系统
$ \begin{align} \left\{ \begin{array}{l} E\dot{{\boldsymbol x}}(t)=A(t){\boldsymbol x}(t)+G(t){\boldsymbol \omega}(t)+\\ \qquad B(t)u(t), \quad {\boldsymbol x}(t)\notin \mathcal{S}_k\\ {\boldsymbol x}^{+}_{k}(t)=A_{d, k}{\boldsymbol x}(t), \quad {\boldsymbol x}(t)\in \mathcal{S}_k\\ {\boldsymbol x}(t_{0})={\boldsymbol x}_{0}\quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} \right. \end{align} $
(9) 对上述系统找到一个状态反馈控制律
$ \begin{align*} {\boldsymbol u}(t)=K(t){\boldsymbol x}(t) \end{align*} $
使得闭环系统
$ \begin{align} \left\{ \begin{array}{l} E\dot{{\boldsymbol x}}(t)=A_c(t){\boldsymbol x}(t)+G(t){\boldsymbol \omega}(t), \quad {\boldsymbol x}(t)\notin \mathcal{S}_k\\ {\boldsymbol x}^{+}_{k}(t)=A_{d, k}{\boldsymbol x}(t), \quad {\boldsymbol x}(t)\in \mathcal{S}_k\\ {\boldsymbol x}(t_{0})={\boldsymbol x}_{0}, \quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} \right. \end{align} $
(10) 是时域稳定, 其中 $A_c(t)=A(t)+B(t)K(t)$ .
定理5.对于系统 (10), 如果存在分段连续可微对称非奇异的函数矩阵 $\bar{P}(\cdot)$ 、函数矩阵 $L_{k}(\cdot)$ 和非负标量 $C_{i, k}\leq 0$ 满足下列不等式组, $\forall t\in J$ .
$ \begin{bmatrix} \Pi_{1}(t)&G(t)\\ G^{\rm T}(t)&-I \end{bmatrix} < 0 $
(11a) $ \begin{array}{l} A_{d, k}^{\rm T}E^{\rm T}\bar{P}^{-1}(t)A_{d, k}-E^{\rm T}\bar{P}^{-1}(t)-\\ \qquad \quad \sum\limits_{i=1}^{p}c_{i, k}(t)Q_{i, k} < 0\\ \qquad {\boldsymbol x}(t)\in S_k, \quad k=1, 2, \cdot\cdot\cdot, {N} \end{array} $
(11b) $ E^{\rm T}\Gamma(t)\leq E^{\rm T}\bar{P}^{-1}(t)\leq E^{\rm T}\bar{P}^{-1}(t_0) < E^{\rm T}R $
(11c) 则称系统 (10) 对于 $(c_1, c_2, {\boldsymbol\omega}(t), J, R, \Gamma(\cdot))$ 时域稳定, 且状态反馈控制律为
$ \begin{align} K_k(t)=L_k(t)\bar{P}^{-1}(t) \end{align} $
(12) 其中, $\Pi_1(t)=-E\dot{\bar{P}}(t)+\bar{P}^{\rm T}(t)A^{\rm T}(t)+A(t)\bar{P}(t)+L^{\rm T}_{k}(t)B^{\rm T}(t)+B(t)L_{k}(t)$ .
证明.对于 $t\in J_k$ , 将状态反馈控制律 $K_{k}(t)=L_{k}(t)\bar{P}^{-1}(t)$ 带入式 (9), 可以得到闭环系统 (10), 其中, $A_{c}(t)=A(t)+B(t)L_{i}(t)\bar{P}(t)^{-1}$ .显然 (11a) 等价于下列不等式:
$ \begin{align} \left[\begin{array}{cc}\Pi_{2}(t)&G(t)\\ G^{\rm T}(t)&-I\end{array}\right] < 0 \end{align} $
(13) 其中
$ \begin{align*} \Pi_{2}(t)=-E\dot{\bar{P}}(t)+\bar{P}^{\rm T}(t)A_{c}^{\rm T}(t)+A_{c}(t)\bar{P}(t) \end{align*} $
令 $P(t)=\bar{P}^{-1}(t)$ , 将式 (13) 分别左乘 ${\rm diag}\{\bar{P}^{\rm -T}(t), I\}$ , 右乘 ${\rm diag} \{\bar{P}^{-1}(t), I\}$ , 得到下列不等式:
$ \begin{align*} \left[\begin{array}{cc}\Pi_{3}(t)&\bar{P}^{\rm-T}(t)G(t)\\ G^{\rm T}(t)\bar{P}^{-1}(t)&-I\end{array}\right] < 0 \end{align*} $
其中, $ \Pi_{3}(t)=-\bar{P}^{\rm -T}(t)E\dot{\bar{P}}(t)\bar{P}^{-1}(t)+ A_{c}^{\rm T}(t) \bar{P}^{-1}(t)+\bar{P}^{\rm -T}(t)A_{c}(t).$
因为 $P(t)=\bar{P}^{-1}(t)$ , 故
$ \begin{align*} I=\bar{P}(t)P(t), \quad 0=\dot{\bar{P}}(t)P(t)+\bar{P}(t)\dot{P}(t) \end{align*} $
又因为 $E^{\rm T}P(t)=P^{\rm T}(t)E\geq0$ , 我们很容易可以得出:
$ \begin{align*} -P^{\rm T}(t)E\dot{\bar{P}}(t)P(t)=-E^{\rm T}P(t)\dot{\bar{P}}(t)P(t)=E^{\rm T}\dot{P}(t)\end{align*} $
由此可得:
$ \begin{align} \left[\begin{array}{cc}\Pi_{4}(t)&P^{\rm T}(t)G(t)\\ G^{\rm T}(t)P(t)&-I\end{array}\right] < 0 \end{align} $
(14) 其中
$ \begin{align*} \Pi_{4}(t)=E^{\rm T}\dot{P}(t)+A_c^{\rm T}(t)P(t)+P(t)A_c(t) \end{align*} $
另一方面, 因为 $P(t)=\bar{P}^{-1}(t)$ , 条件 (11b) 和 (11c) 等价于式 (7c) 和 (7d).综上所述, 闭环系统 (10) 是对于 $(c_1, c_2, {\boldsymbol\omega}(t), J, R, \Gamma(\cdot))$ 时域稳定的.
为了将小区间内的时变矩阵不等式转化为标准的矩阵不等式组.可以将小区间内的时变矩阵不等式做如下处理.假设 $P(t)$ (或 $\bar{P}(t)$ ) 是分段线性的, $P(t)$ (或 $\bar{P}(t)$ ) 在 $\mathcal{T}_{x(\cdot)}$ 处发生跳变 (以下只给出 $P(t)$ (或 $\bar{P}(t)$ ) 的形式, $L(t)$ 、 $\dot{P}(t)$ 形式与 $P(t)$ 类似).
$ \begin{align*} \label{eq} \left\{ \begin{aligned} & P(0)({\rm or}\ (\bar{P}(0)))=\Pi_{1}^{0}\\ & P(t)({\rm or}\ (\bar{P}(t)))=\Pi_{k}^{0}+\Pi_{k}^{s}(t-(k-1)T_{s}), \\ & \qquad \qquad k\in N : kx \bar{k}, \quad t\in[(k-1)T_{s}, kT_{s}]\\ & P(t)({\rm or}\ (\bar{P}(t)))=\Pi_{\bar{k}+1}^{0}+\Pi_{\bar{k}+1}^{0}(t-\bar{k}T_{s}), t\in[\bar{k}T_{s}, T] \end{aligned} \right. \end{align*} $
因此上述条件可以转化为一组标准的矩阵不等式求解问题.由于 $E^{\rm T}P(t)=P^{\rm T}(t)E\geq0$ ( $E^{\rm T}\Pi_{k}^{0}=\Pi_{k}^{0\rm T}E\geq0$ $E^{\rm T}\Pi_{k}^{s}=\Pi_{k}^{s{\rm T}}E\geq0$ ) 是一组非严格的矩阵不等式, 这样对于求解会造成一定的麻烦.为了将非严格的矩阵不等式组转化为严格的矩阵不等式组, 我们介绍如下引理.
引理2[31].如果 $X\in \boldsymbol{R}^{n\times n}$ 是对称矩阵且满足 $E_{L}^{\rm T}XE_{L}>0$ , $T\in {\bf R }^{(n-r)\times(n-r)}$ 是非奇异矩阵.则 $XE+M^{\rm T}TS^{\rm T}$ 也是非奇异的且它的逆可以表示为
$ \begin{align*} (XE+M^{\rm T}TS^{\rm T})^{-1}=XE^{\rm T}+STM \end{align*} $
其中, $X$ 是对称矩阵, $T$ 是非奇异矩阵.
$ \begin{align*} E_{R}^{\rm T}XE_{R}=(E_{L}^{\rm T}XE_{L})^{-1}, \ T=(S^{\rm T}S)^{-1}T^{-1}(MM^{\rm T})^{-1}\end{align*} $
$M$ 和 $S$ 是行满秩矩阵满足 $ME=0$ , $ES=0$ ; $E$ 可以分解为 $E=E_{L}E_{R}^{\rm T}$ , 其中 $E_{L}\in \boldsymbol{R}^{n\times r}$ , $E_{R}\in {\bf R }^{n\times r}$ 是列满秩的.
令 $\Pi_{k}^{0}=X_{k}^{0}E+M^{\rm T}T_{k}^{0}S^{\rm T}$ , $\Pi_{k}^{s}=X_{k}^{s}E+M^{\rm T}T_{k}^{s}S^{\rm T}$ .根据引理2可以得到 $(X_{k}^{0}E+M^{\rm T}T_{k}^{0}S^{\rm T})^{-1}=X_{k}^{0}E^{\rm T}+ST_{k}^{0}M$ 和 $(X_{k}^{s}E+M^{\rm T}T_{k}^{s}S^{\rm T})^{-1}=X_{k}^{s}E^{\rm T}+ST_{k}^{0}M$ .这样 $E^{\rm T}P(t)=P^{\rm T}(t)E\geq0$ 就得到了满足.因此, 非严格的矩阵不等式组转化为了严格的矩阵不等式组.利用Matlab LMI工具箱, 就可以对 $X_{k}^{s}, T_{k}^{0}, T_{k}^{s}, X_{k}^{0}$ (或 $X_{k}^{0}, X_{k}^{s}, T_{k}^{0}, T_{k}^{s}), \Lambda_{k}^{0}, \Lambda_{k}^{s}$ 进行求解, 从而得到 $P(t)$ (或 $(\bar{P}(t))$ 和 $L(t)$ .
4. 数值算例
例1.考虑广义时变脉冲系统 (9),
$ \begin{align*} &E=\left[\begin{array}{ccc} 1&0\\0&0 \end{array}\right], \quad A=\left[\begin{array}{ccc} 1&-1.5\\0.5&t \end{array}\right]\\ &A_{d, 1}=\left[\begin{array}{ccc} 0.8&0\\-1&0.5 \end{array}\right], \quad G=\left[\begin{array}{ccc} 1\\1 \end{array}\right] B=\left[\begin{array}{ccc} 0\\1 \end{array}\right] \end{align*} $
跳变集合
$ \begin{align*} \mathcal{S}_1= \left(\begin{array}{*{20}c}\left(\begin{array}{*{20}c}0.5\\ 0.2\end{array}\right), &\left(\begin{array}{*{20}c}0.4\\ 0.4 \end{array}\right)\end{array}\right) \end{align*} $
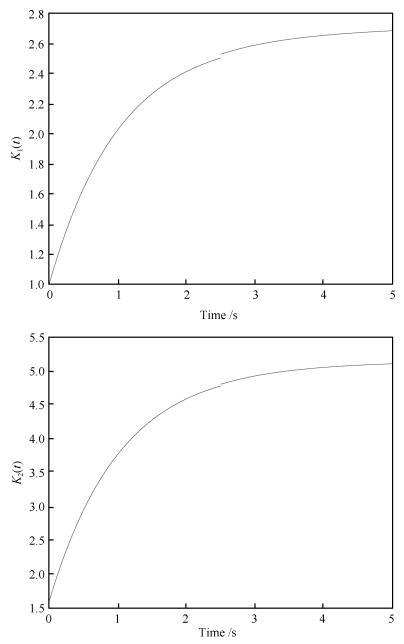
其中, 选取 ${\boldsymbol\omega}(t)=1$ , $J=[0 {\rm s}\quad 5 {\rm s}]$ , $R=\left[{array}{ccc} 2&0\\0&2 {array}\right]$ , $c_1=3$ , $c_2=4$ .由引理1可选取
$ \begin{align*} Q=\left[\begin{array}{ccc} 0.4000&-0.7000\\-0.7000&1.0000 \end{array}\right]\end{align*} $
显然
$ \begin{align*} E_{R}=E_{L}=\left[\begin{array}{ccc} 1\\0 \end{array}\right] \end{align*} $
我们选 $M^{\rm T}=S=[0 \quad 1]^{\rm T}$ .则存在 $\Gamma(t)=\left[{array}{ccc} 1&0\\0&1{array}\right]$ , 根据Matlab LMI工具箱求解矩阵不等式组, 可得正数 $c_1(\cdot)$ 及矩阵 $P(\cdot), L_1(\cdot)$ , 使得式 (11) 成立, 则闭环系统 (10) 是时域稳定的, 且状态反馈控制律 $K(t)=[K_1(t)\quad K_2(t)]$ 见图 1.
5. 结论
本文针对状态依赖广义时变脉冲系统时域稳定问题进行研究, 给出了广义时变脉冲系统时域稳定充分条件及状态反馈控制器的设计.并且对上述充分条件提出DLMIs优化计算的方法, 使得这类问题在数值计算上易于处理.利用分段线性化将小区间内广义时变矩阵不等式转化为广义时不变线性矩阵不等式来求解.最后给出数值算例来验证结论的有效性.
-
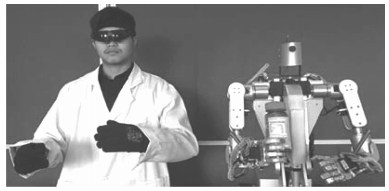
图 8 遥操作护理机器人系统的药瓶抓取和递送实验
Fig. 8 Experiment on delivering and taking medicine bottle of telerobotic nursing system
表 1 对应机械臂各关节的解算姿态数据精度
Table 1 Average errors of five calculated joint angles
关节角 角度变化均值(°) 比较误差均值(°) 相对误差 肩部俯仰角 4.653 0.594 0.127 肩部横滚角 4.02 0.451 0.112 肩部偏航角 4.942 0.722 0.146 肘部俯仰角 2.145 0.547 0.255 肘部横滚角 3.581 0.695 0.194  下载: 导出CSV
下载: 导出CSV
-
[1] 王田苗, 陶永, 陈阳.服务机器人技术研究现状与发展趋势.中国科学:信息科学, 2012, 42(9):1049-1066 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201209001.htmWang Tian-Miao, Tao Yong, Chen Yang. Research status and development trends of the service robotic technology. Scientia Sinica Informationis, 2012, 42(9):1049-1066 http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201209001.htm [2] 谭民, 王硕.机器人技术研究进展.自动化学报, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtmlTan Min, Wang Shuo. Research progress on robotics. Acta Automatica Sinica, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtml [3] Joubair A, Zhao L F, Bigras P, Bonev I. Absolute accuracy analysis and improvement of a hybrid 6-DOF medical robot. Industrial Robot:An International Journal, 2015, 42(1):44-53 doi: 10.1108/IR-09-2014-0396 [4] Chen T L, Kemp C C. A direct physical interface for navigation and positioning of a robotic nursing assistant. Advanced Robotics, 2011, 25(5):605-627 doi: 10.1163/016918611X558243 [5] Kawasaki H, Kimura H, Ito S, Nishimoto Y, Hayashi H, Sakaeda H. Hand rehabilitation support system based on self-motion control, with a clinical case report. In:Proceedings of the 2006 World Automation Congress. Budapest, Hungary:IEEE, 2006. 1-6 [6] Mihelj M, Nef T, Riener R. ARMin-toward a six DoF upper limb rehabilitation robot. In:Proceedings of the 1st IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics. Pisa, Italy:IEEE, 2006. 1154-1159 [7] Li J M, Wang S X, Wang X F, He C. Optimization of a novel mechanism for a minimally invasive surgery robot. The International Journal of Medical Robotics and Computer Assisted Surgery, 2010, 6(1):83-90 doi: 10.1002/rcs.293/abstract [8] Miyamoto H, Leechavengvongs S, Atik T, Facca S, Liverneaux P. Nerve transfer to the deltoid muscle using the nerve to the long head of the triceps with the da vinci robot:six cases. Journal of Reconstructive Microsurgery, 2014, 30(6):375-380 doi: 10.1055/s-00000029 [9] Ma G W, Pytel M, Trejos A L, Hornblower V, Smallwood J, Patel R, Fenster A, Malthaner R A. Robot-assisted thoracoscopic brachytherapy for lung cancer:comparison of the ZEUS robot, VATS, and manual seed implantation. Computer Aided Surgery, 2007, 12(5):270-277 doi: 10.3109/10929080701626961 [10] Mukai T, Hirano S, Nakashima H, Sakaida Y, Guo S J. Realization and safety measures of patient transfer by nursing-care assistant robot RIBA with tactile sensors. Journal of Robotics and Mechatronics, 2011, 23(3):360-369 doi: 10.20965/jrm.issn.1883-8049 [11] Wester B A, Para M P, Sivakumar A, Kutzer M D, Katyal K D, Ravitz A D, Beaty J D, McLoughlin M P, Johannes M S. Experimental validation of imposed safety regions for neural controlled human patient self-feeding using the modular prosthetic limb. In:Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan:IEEE, 2013. 877-884 [12] Windolf M, Götzen N, Morlock M. Systematic accuracy and precision analysis of video motion capturing systems-exemplified on the Vicon-460 system. Journal of Biomechanics, 2008, 41(12):2776-2780 doi: 10.1016/j.jbiomech.2008.06.024 [13] Seeberger R, Kane G, Hoffmann J, Eggers G. Accuracy assessment for navigated maxillo-facial surgery using an electromagnetic tracking device. Journal of Cranio-Maxillofacial Surgery, 2012, 40(2):156-161 doi: 10.1016/j.jcms.2011.03.003 [14] Hess W. Head-tracking techniques for virtual acoustics applications. In:Proceedings of the 2012 Audio Engineering Society Convention 133. Erlangen, Germany:Fraunhofer Institute for Integrated Circuits IIS, 2012. (8782):1-15 [15] Rudas I J, Gáti J, Szakál A, Némethy K. From exoskeleton to the Antal Bejczy center for intelligent robotics. In:Proceedings of the 2015 IEEE Intelligent Systems and Informatics. Subotica, Serbia:IEEE, 2015. 11 [16] Simeone A L. Substitutional reality:towards a research agenda. In:Proceedings of the 1st IEEE Workshop on Everyday Virtual Reality. Arles, France:IEEE, 2015. 19-22 [17] Zhang F, DiSanto W, Ren J, Dou Z, Yang Q, Huang H. A novel CPS system for evaluating a neural-machine interface for artificial legs. In:Proceedings of the 2011 IEEE/ACM International Conference on Cyber-Physical Systems. Chicago, IL, USA:IEEE, 2011. 67-76 [18] Ogawa M, Honda K, Sato Y, Kudoh S, Oishi T, Ikeuchi K. Motion generation of the humanoid robot for teleoperation by task model. In:Proceedings of the 24th IEEE International Symposium on Robot and Human Interactive Communication. Kobe, Japan:IEEE, 2015. 71-76 [19] Dai J S. Euler-Rodrigues formula variations, quaternion conjugation and intrinsic connections. Mechanism and Machine Theory, 2015, 92:144-152 doi: 10.1016/j.mechmachtheory.2015.03.004 [20] Xinjilefu X, Feng S Y, Huang W W, Atkeson C G. Decoupled state estimation for humanoids using full-body dynamics. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China:IEEE, 2014. 195-201 [21] Zhang Z Q, Meng X L, Wu J K. Quaternion-based Kalman filter with vector selection for accurate orientation tracking. IEEE Transactions on Instrumentation and Measurement, 2012, 61(10):2817-2824 doi: 10.1109/TIM.2012.2196397 [22] Fresk E, Nikolakopoulos G. Full quaternion based attitude control for a quadrotor. In:Proceedings of the 2013 European Control Conference. Zurich, Switzerland:IEEE, 2013. 3864-3869 [23] Carminati M, Ferrari G, Grassetti R, Sampietro M. Real-time data fusion and MEMS sensors fault detection in an aircraft emergency attitude unit based on Kalman filtering. IEEE Sensors Journal, 2012, 12(10):2984-2992 doi: 10.1109/JSEN.2012.2204976 [24] 葛泉波, 李文斌, 孙若愚, 徐姿.基于EKF的集中式融合估计研究.自动化学报, 2013, 39(6):816-825 http://www.aas.net.cn/CN/abstract/abstract18107.shtmlGe Quan-Bo, Li Wen-Bin, Sun Ruo-Yu, Xu Zi. Centralized fusion algorithms based on EKF for multisensor non-linear systems. Acta Automatica Sinica, 2013, 39(6):816-825 http://www.aas.net.cn/CN/abstract/abstract18107.shtml [25] 彭孝东, 张铁民, 李继宇, 陈渝.基于传感器校正与融合的农用小型无人机姿态估计算法.自动化学报, 2015, 41(4):854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtmlPeng Xiao-Dong, Zhang Tie-Min, Li Ji-Yu, Chen Yu. Attitude estimation algorithm of agricultural small-UAV based on sensors fusion and calibration. Acta Automatica Sinica, 2015, 41(4):854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtml [26] Zhao H, Wang Z Y. Motion measurement using inertial sensors, ultrasonic sensors, and magnetometers with extended Kalman filter for data fusion. IEEE Sensors Journal, 2012, 12(5):943-953 doi: 10.1109/JSEN.2011.2166066 [27] Valenti R G, Dryanovski I, Xiao J Z. Keeping a good attitude:a quaternion-based orientation filter for IMUs and MARGs. Sensors, 2015, 15(8):19302-19330 doi: 10.3390/s150819302 -

 下载:
下载:





计量
- 文章访问数: 2713
- HTML全文浏览量: 491
- PDF下载量: 1030
- 被引次数: 0
