

-
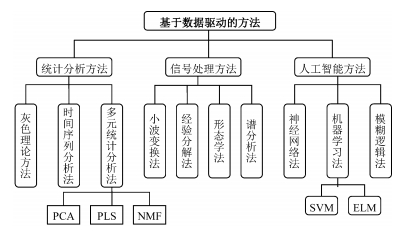
摘要: 能否及时诊断出微小故障是保障系统安全运行并抑制故障恶化的关键,本文针对微小故障幅值低、易被系统扰动和噪声掩盖等特点,从数据驱动的角度对现有研究进行综述.并将其分为三大类: 基于统计分析的微小故障诊断技术、基于信号处理的微小故障诊断技术和基于人工智能的微小故障诊断技术,进而对不同方法的基本研究思想、研究进展、应用以及局限性予以介绍.最后不仅指出复杂系统微小故障诊断研究中的现存问题,而且从增加新的信息、挖掘未利用的隐含信息和采用新的数学工具三个角度进行展望,提出基于关联性分析、基于多源信息融合、基于机器学习和基于时频分析四个值得探究的微小故障诊断思想.Abstract: As timely incipient fault diagnosis is the key to guarantee operation safety and suppress fault deterioration, this paper gives a review of data driven-based researches for incipient faults, which have low amplitude and may be covered by system disturbance and noise easily. Data driven-based incipient fault diagnosis can be divided into three parts, i.e., statistical analysis-based technology, signal processing-based technology, artificial intelligence-based technology. Their basic ideas, research progresses, application and limitations are discussed in detail. Furthermore, this paper not only points out the existing problems about complex systems, but also looks forward to the advance of this area by means of adding new information, mining unused implied information, using new mathematical tools. Finally, four thoughts worth exploring are proposed: diagnosis based on correlation analysis, multi-source information fusion, machine learning and time-frequency transform.
-
近些年来, 由于多智能体协同控制在编队控制[1]、机器人网络[2]、群集行为[3]、移动传感器[4-5]等方面的广泛应用, 多智能体系统的协同控制问题受到了众多研究者的广泛关注.一致性问题是多智能体系统协同控制领域的一个关键问题, 其目的是通过与邻居之间的信息交换, 使所有智能体的状态达成一致.迄今为止, 对多智能体一致性的研究也已取得了丰硕的成果, 根据多智能体的动力学模型分类, 主要可以将其分为以下4种情形:一阶[6-9]、二阶[10-13]、三阶[14-15]、高阶[16-18].
在实际应用中, 由于CPU处理速度和内存容量的限制, 智能体不能频繁地进行控制以及与其邻居交换信息.因此, 事件触发控制策略作为减少控制次数和通信负载的有效途径, 受到了越来越多的关注.到目前为止, 对事件触发控制机制的研究也取得了很多成果[19-23].Xiao等[19]基于事件触发控制策略, 解决了带有领航者的离散多智能体系统的跟踪问题.通过利用状态测量误差并且基于二阶离散多智能体系统动力学模型, Zhu等[20]提出了一种自触发的控制策略, 该策略使得所有智能体的状态均达到一致. Huang等[21]研究了基于事件触发策略的Lur$'$e网络的跟踪问题.针对不同的领航者-跟随者系统, Xu等[22]提出了3种不同类型的事件触发控制器, 包含分簇式控制器、集中式控制器和分布式控制器, 以此来解决对应的一致性问题.然而, 大多数现有的事件触发一致性成果集中于考虑一阶多智能体系统和二阶多智能体系统, 很少有成果研究三阶多智能体系统的事件触发控制问题, 特别是对于三阶离散多智能体系统, 成果更是少之又少.所以, 设计相应的事件触发控制协议来解决三阶离散多智能体系统的一致性问题已变得尤为重要.
本文研究了基于事件触发控制机制的三阶离散多智能体系统的一致性问题, 文章主要有以下三点贡献:
1) 利用位置、速度和加速度三者的测量误差, 设计了一种新颖的事件触发控制机制.
2) 利用不等式技巧, 分析得到了保证智能体渐近收敛到一致状态的充分条件.与现有的事件触发文献[19-22]不同的是, 所得的一致性条件与通信拓扑的Laplacian矩阵特征值和系统的耦合强度有关.
3) 给出了排除类Zeno行为的参数条件, 进而使得事件触发控制器不会每个迭代时刻都更新.
1. 预备知识
1.1 代数图论
智能体间的通信拓扑结构用一个有向加权图来表示, 记为.其中, $\vartheta = \left\{ {1, 2, \cdots, n} \right\}$表示顶点集, $\varsigma\subseteq\vartheta\times\vartheta$表示边集, 称作邻接矩阵, ${a_{ij}}$表示边$\left({j, i} \right) \in \varsigma $的权值.当$\left({j, i} \right) \in \varsigma $时, 有${a_{ij}} > 0$; 否则, 有${a_{ij}} = 0$. ${a_{ij}} > 0$表示智能体$i$能收到来自智能体$j$的信息, 反之则不成立.对任意一条边$j$, 节点$j$称为父节点, 节点$i$则称为子节点, 节点$i$是节点$j$的邻居节点.假设通信拓扑中不存在自环, 即对任意$i\in \vartheta $, 有${a_{ii}} = 0$.
定义$L = \left({{l_{ij}}}\right)\in{\bf R}^{n\times n}$为图${\cal G}$的Laplacian矩阵, 其中元素满足${l_{ij}} = - {a_{ij}} \le 0, i \ne j$; ${l_{ii}} = \sum\nolimits_{j = 1, j \ne i}^n {{a_{ij}} \ge 0} $.智能体$i$的入度定义为${d_i} = \sum\nolimits_{j = 1}^n {{a_{ij}}} $, 因此可得到$L = D - \Delta $, 其中, .如果有向图中存在一个始于节点$i$, 止于节点$j$的形如的边序列, 那么称存在一条从$i$到$j$的有向路径.特别地, 如果图中存在一个根节点, 并且该节点到其他所有节点都有有向路径, 那么称此有向图存在一个有向生成树.另外, 如果有向图${\cal G}$存在一个有向生成树, 则Laplacian矩阵$L$有一个0特征值并且其他特征值均含有正实部.
1.2 模型描述
考虑多智能体系统由$n$个智能体组成, 其通信拓扑结构由有向加权图${\cal G}$表示, 其中每个智能体可看作图${\cal G}$中的一个节点, 每个智能体满足如下动力学方程:
$ \begin{equation} \left\{ \begin{array}{l} {x_i}\left( {k + 1} \right) = {x_i}\left( k \right) + {v_i}\left( k \right)\\ {v_i}\left( {k + 1} \right) = {v_i}\left( k \right) + {z_i}\left( k \right)\\ {z_i}\left( {k + 1} \right) = {z_i}\left( k \right) + {u_i}\left( k \right) \end{array} \right. \end{equation} $
(1) 其中, ${x_i}\left(k \right) \in \bf R$表示位置状态, ${v_i}\left(k \right) \in \bf R$表示速度状态, ${z_i}\left(k \right) \in \bf R$表示加速度状态, ${u_i}\left(k \right) \in \bf R$表示控制输入.
基于事件触发控制机制的控制器协议设计如下:
$ \begin{equation} {u_i}\left( k \right) = \lambda {b_i}\left( {k_p^i} \right) + \eta {c_i}\left( {k_p^i} \right) + \gamma {g_i}\left( {k_p^i} \right), k \in \left[ {k_p^i, k_{p + 1}^i} \right) \end{equation} $
(2) 其中, $\lambda> 0$, $\eta> 0$, $\gamma> 0$表示耦合强度,
$ \begin{align*}&{b_i}\left( k \right)= \sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{x_j}\left( k \right) - {x_i}\left( k \right)} \right)} , \nonumber\\ &{c_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{v_j}\left( k \right) - {v_i}\left( k \right)} \right)}, \nonumber\\ & {g_i}\left( k \right)=\sum\nolimits_{j \in {N_i}} {{a_{ij}}\left( {{z_j}\left( k \right) - {z_i}\left( k \right)} \right)} .\end{align*} $
触发时刻序列定义为:
$ \begin{equation} k_{p + 1}^i = \inf \left\{ {k:k > k_p^i, {E_i}\left( k \right) > 0} \right\} \end{equation} $
(3) ${E_i}\left(k \right)$为触发函数, 具有以下形式:
$ \begin{align} {E_i}\left( k \right)= & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|- {\delta _2}{\beta ^k} - \nonumber\nonumber\\ &{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| - {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| \end{align} $
(4) 其中, ${\delta _1} > 0$, ${\delta _2} > 0$, $\beta > 0$, , ${e_{ci}}\left(k \right) = {c_i}\left({k_p^i} \right) - {c_i}\left(k \right)$, ${e_{gi}}\left(k \right) = {g_i}\left({k_p^i} \right) - {g_i}\left(k \right)$.
令$\varepsilon _i\left(k\right)={x_i}\left(k\right)-{x_1}\left(k\right)$, ${\varphi _i}\left(k\right)={v_i}\left(k \right)-$ ${v_1}\left(k\right)$, ${\phi _i}(k) = {z_i}(k) - {z_1}\left(k \right)$, $i = 2, \cdots, n$. , $\cdots, {\varphi _n}\left(k \right)]^{\rm T}$, $\phi \left(k \right) = {\left[{{\phi _2}\left(k \right), \cdots, {\phi _n}\left(k \right)} \right]^{\rm T}}$. $\psi \left(k \right) = {\left[{{\varepsilon ^{\rm T}}\left(k \right), {\varphi ^{\rm T}}\left(k \right), {\phi ^{\rm T}}\left(k \right)} \right]^{\rm T}}$, , ${\bar e_b} = {\left[{{e_{b1}}\left(k \right), \cdots, {e_{b1}}\left(k \right)} \right]^{\rm T}}$, , ${e_{c1}}\left(k \right)]^{\rm T}$, , ${\bar e_g} = $ ${\left[{{e_{g1}}\left(k \right), \cdots, {e_{g1}}\left(k \right)} \right]^{\rm T}}$, $\tilde e\left(k \right) = [\tilde e_b^{\rm T}\left(k \right), \tilde e_c^{\rm T}\left(k \right), $ $\tilde e_g^{\rm T}\left(k \right)]^{\rm T}$, $\bar e\left(k \right) = [\bar e_b^{\rm T}\left(k \right), \bar e_c^T\left(k \right), \bar e_g^{\rm T}\left(k \right)]^{\rm T}$,
$ \hat L = \left[ {\begin{array}{*{20}{c}} {{d_2} + {a_{12}}}&{{a_{13}} - {a_{23}}}& \cdots &{{a_{1n}} - {a_{2n}}}\\ {{a_{12}} - {a_{32}}}&{{d_3} + {a_{13}}}& \cdots &{{a_{1n}} - {a_{3n}}}\\ \vdots & \vdots & \ddots & \vdots \\ {{a_{12}} - {a_{n2}}}&{{a_{13}} - {a_{n3}}}& \cdots &{{d_n} + {a_{1n}}} \end{array}} \right] $
再结合式(1)和式(2)可得到:
$ \begin{equation} \psi \left( {k + 1} \right) = {Q_1}\psi \left( k \right) + {Q_2}\left( {\tilde e\left( k \right) - \bar e\left( k \right)} \right) \end{equation} $
(5) 其中, , .
定义1.对于三阶离散时间多智能体系统(1), 当且仅当所有智能体的位置变量、速度变量、加速度变量满足以下条件时, 称系统(1)能够达到一致.
$ \begin{align*} &{\lim _{k \to \infty }}\left\| {{x_j}\left( k \right) - {x_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{v_j}\left( k \right) - {v_i}\left( k \right)} \right\| = 0 \nonumber\\ & {\lim _{k \to \infty }}\left\| {{z_j}\left( k \right) - {z_i}\left( k \right)} \right\| = 0 \\&\quad\qquad \forall i, j = 1, 2, \cdots , n \end{align*} $
定义2.如果$k_{p + 1}^i - k_p^i > 1$, 则称触发时刻序列$\left\{ {k_p^i} \right\}$不存在类Zeno行为.
假设1.假设有向图中存在一个有向生成树.
2. 一致性分析主要结果
假设$\kappa$是矩阵${Q_1}$的特征值, ${\mu _i}$是$L$的特征值, 则有如下等式成立:
$ {\rm{det}}\left( {\kappa {I_{3n - 3}} - {Q_1}} \right)=\nonumber\\ \det \left(\! \!{\begin{array}{*{20}{c}} {\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\!&\!{{0_{n - 1}}}\\ {{0_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}}}\!&\!{ - {I_{n - 1}}}\\ {\lambda {{\hat L}_{n - 1}}}\!&\!{\eta {{\hat L}_{n - 1}}}\!&\!{\left( {\kappa - 1} \right){I_{n - 1}} + \gamma {{\hat L}_{n - 1}}} \end{array}} \!\!\right)=\nonumber\\ \prod\limits_{i = 2}^n {\left[ {{{\left( {\kappa - 1} \right)}^3} + \left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i}} \right]} $
令
$ \begin{align} {m_i}\left( \kappa \right)= &{\left( {\kappa - 1} \right)^3} + \nonumber\\&\left( {\lambda + \eta \left( {\kappa - 1} \right) + \gamma {{\left( {\kappa - 1} \right)}^2}} \right){\mu _i} = 0, \nonumber\\& \qquad\qquad\qquad\qquad\qquad i = 2, \cdots , n \end{align} $
(6) 则有如下引理:
引理1[15]. 如果矩阵$L$有一个0特征值且其他所有特征值均有正实部, 并且参数$\lambda $, $\eta $, $\gamma $满足下列条件:
$ \left\{ \begin{array}{l} 3\lambda - 2\eta < 0\\ \left( {\gamma - \eta + \lambda } \right)\left( {\lambda - \eta } \right) < - \dfrac{{\lambda \Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}}\\ \left( {4\gamma + \lambda - 2\eta } \right)<\dfrac{{8\Re \left( {{\mu _i}} \right)}}{{{{\left| {{\mu _i}} \right|}^2}}} \end{array} \right. $
那么, 方程(6)的所有根都在单位圆内, 这也就意味着矩阵${Q_1}$的谱半径小于1, 即$\rho \left({{Q_1}} \right) < 1$.其中, 表示特征值${\mu _i}$的实部.
引理2[23]. 如果, 那么存在$M \ge 1$和$0 < \alpha < 1$使得下式成立
$ {\left\| {{Q_1}} \right\|^k} \le M{\alpha ^k}, \quad k \ge 0 $
定理1. 对于三阶离散多智能体系统(1), 基于假设1, 如果式(2)中的耦合强度满足引理1中的条件, 触发函数(4)中的参数满足$0 < {\delta _1} < 1$, , $0 < \alpha < \beta < 1$, 则称系统(1)能够实现渐近一致.
证明.令$\omega \left(k \right) = \tilde e\left(k \right) - \bar e\left(k \right)$, 式(5)能够被重新写成如下形式:
$ \begin{equation} \psi \left( k \right) = Q_1^k\psi \left( 0 \right) + {Q_2}\sum\limits_{s = 0}^{k - 1} {Q_1^{k - 1 - s}\omega \left( s \right)} \end{equation} $
(7) 根据引理1和引理2可知, 存在$M \ge 1$和$0 < \alpha < 1$使得下式成立.
$ \begin{align} \left\| {\psi \left( k \right)} \right\|\le & {\left\| {{Q_1}} \right\|^k}\left\| {\psi \left( 0 \right)} \right\| + \nonumber\\ & \left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{{\left\| {{Q_1}} \right\|}^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|}\le \nonumber\\ & M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+\nonumber\\ & M\left\| {{Q_2}} \right\|\sum\limits_{s = 0}^{k - 1} {{\alpha ^{k - 1 - s}}\left\| {\omega \left( s \right)} \right\|} \end{align} $
(8) 由触发条件可得:
$ \begin{align} & \left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ & \qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^k}\le\nonumber\\ &\qquad {\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\| + {\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\| + \nonumber\\ &\qquad{\delta _1}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\|+ {\delta _1}\left| {{e_{bi}} \left( k \right)} \right| + \nonumber\\ &\qquad{\delta _1}\left| {{e_{ci}} \left( k \right)} \right|+ {\delta _1}\left| {{e_{gi}}\left( k \right)} \right| + {\delta _2}{\beta ^k} \end{align} $
(9) 对上式移项可求解得:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le \nonumber\\ &\qquad\frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varepsilon \left( k \right)} \right\|}}{{1 - {\delta _1}}} + \frac{{{\delta _1}\left\| L \right\| \cdot \left\| {\varphi \left( k \right)} \right\|}}{{1 - {\delta _1}}}{\rm{ + }}\nonumber\\ &\qquad\frac{{{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\phi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(10) 又因为, 和, 可得出下列不等式:
$ \begin{align} &\left| {{e_{bi}}\left( k \right)} \right| + \left| {{e_{ci}}\left( k \right)} \right| + \left| {{e_{gi}}\left( k \right)} \right|\le\nonumber\\ &\qquad \frac{{{\delta _1}\left\| L \right\|}}{{1 - {\delta _1}}} \cdot \left( {\left\| {\varepsilon \left( k \right)} \right\|{\rm{ + }}\left\| {\varphi \left( k \right)} \right\|{\rm{ + }}\left\| {\phi \left( k \right)} \right\|} \right) +\nonumber\\ &\qquad \frac{{{\delta _2}{\beta ^k}}}{{1 - {\delta _1}}}\le \frac{{3{\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{{\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(11) 接着有如下不等式成立:
$ \begin{align} \left\| {e\left( k \right)} \right\|\le \frac{{3\sqrt n {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| + \frac{{\sqrt n {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(12) 其中, , ${e_b}(k) = \left[{{e_{b1}}(k), \cdots, {e_{bn}}(k)} \right]$, ${e_c}(k) = \left[{{e_{c1}}(k), \cdots, {e_{cn}}(k)} \right]$,
注意到
$ \begin{equation} \left\| {\tilde e( k )} \right\| + \left\| {\bar e( k )} \right\| \le \sqrt {6( {n - 1} )} \left\| {e( k )} \right\| \end{equation} $
(13) 于是有
$ \begin{align} \left\| {\omega ( k )} \right\| &= \left\| {\tilde e( k ) - \bar e\left( k \right)} \right\| \le\nonumber\\ & \left\| {\tilde e\left( k \right)} \right\| + \left\| {\bar e\left( k \right)} \right\|\le\nonumber\\ & \frac{{3\sqrt {6n( {n - 1} )} {\delta _1}}}{{1 - {\delta _1}}}\left\| L \right\| \cdot \left\| {\psi \left( k \right)} \right\| +\nonumber\\ & \frac{{\sqrt {6n( {n - 1} )} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^k} \end{align} $
(14) 把式(14)代入式(8)可得
$ \begin{align} \left\| {\psi \left( k \right)} \right\| &\le M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^k}+ \nonumber\\ &\frac{{M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}} {\delta _1}3\sqrt {6n\left( {n - 1} \right)} \left\| L \right\|}}{{1 - {\delta _1}}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}}\left\| {\psi \left( s \right)} \right\|} + M\left\| {{Q_2}} \right\|{\alpha ^{k - 1}}\times\nonumber\\ &\sum\limits_{s = 0}^{k - 1} {{\alpha ^{ - s}} \frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}} {{1 - {\delta _1}}}{\beta ^s}} \end{align} $
(15) 接下来的部分, 将证明下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| \le W{\beta ^k}.\end{equation} $
(16) 其中, $W = \max \left\{ {{\Theta _1}, {\Theta _2}} \right\}$,
首先, 证明对任意的$\rho > 1$, 下列不等式成立.
$ \begin{equation} \left\| {\psi \left( k \right)} \right\| < \rho W{\beta ^k} \end{equation} $
(17) 利用反证法, 先假设式(17)不成立, 则必将存在${k^ * } > 0$使得并且当$k \in \left({0, {k^ * }} \right)$时$\left\| {\psi \left(k \right)} \right\| < \rho W{\beta ^k}$成立.因此, 根据式(17)可得:
$ \begin{align*} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le\\ &\qquad M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} +\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}M\times \end{align*} $
$ \begin{align*} &\qquad\sum\limits_{s = 0}^{{k^ * } - 1} {\alpha ^{ - s}}\left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot \left\| {\psi \left( s \right)} \right\|}}{{1 - {\delta _1}}}} \right]+ \\ &\qquad M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}}}{{1 - {\delta _1}}}{\beta ^s}} \right]} < \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}} + \rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}}\times\\ &\qquad \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{3\sqrt {6n\left( {n - 1} \right)} {\delta _1}\left\| L \right\| \cdot W{\beta ^s}}} {{1 - {\delta _1}}}} \right]} +\\ &\qquad\rho M\left\| {{Q_2}} \right\|{\alpha ^{{k^ * } - 1}} \sum\limits_{s = 0}^{{k^ * } - 1} {{\alpha ^{ - s}} \left[ {\frac{{\sqrt {6n\left( {n - 1} \right)} {\delta _2}{\beta ^s}}}{{1 - {\delta _1}}}} \right]=} \\ &\qquad \rho M\left\| {\psi \left( 0 \right)} \right\|{\alpha ^{{k^ * }}}- \nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\alpha ^{{k^ * }}}+\nonumber\\ &\qquad \rho \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}}{\beta ^{{k^ * }}} \end{align*} $
1) 当$W = M\left\| {\psi \left(0 \right)} \right\|$时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\| - \nonumber\\ &\qquad \frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} \ge 0 \end{aligned} \end{equation*} $
所以可得到
$ \begin{equation} \rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\| \le \rho M\left\| {\psi \left( 0 \right)} \right\|{\beta ^{{k^ * }}}=\rho W{\beta ^{{k^ * }}} \end{equation} $
(18) 2) 当时, 则有
$ \begin{equation*} \begin{aligned} &M\left\| {\psi \left( 0 \right)} \right\|- \nonumber\\ &\qquad\frac{{M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} \left( {3{\delta _1}\left\| L \right\|W + {\delta _2}} \right)}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right)}} < 0 \end{aligned} \end{equation*} $
所以有
$ \begin{align} &\rho W{\beta ^{{k^ * }}} \le \left\| {\psi \left( {{k^ * }} \right)} \right\|\le\nonumber\\ & \frac{{\rho {\delta _2}M\left\| {{Q_2}} \right\|\sqrt {6n\left( {n - 1} \right)} {\beta ^{{k^ * }}}}}{{\left( {\beta - \alpha } \right)\left( {1 - {\delta _1}} \right) - 3{\delta _1}M\left\| {{Q_2}} \right\|\left\| L \right\|\sqrt {6n\left( {n - 1} \right)} }}=\nonumber\\ &\rho W{\beta ^{{k^ * }}} \end{align} $
(19) 根据以上结果, 式(18)和式(19)都与假设相矛盾.这说明原命题成立, 即对任意的$\rho > 1$, 式(17)成立.易知, 如果$\rho \to 1$, 则式(16)成立.根据式(16)可知, 当$k \to + \infty $时, 有, 则系统(5)是收敛的.由$\psi \left(k \right)$的定义可知, 系统(1)能够实现渐近一致.
定理2. 对于系统(1), 如果定理1中的条件成立, 并且控制器(2)中的设计参数满足如下条件,
$ {\delta _1} \in \left( {\frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}}, 1} \right)\\ {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } $
那么触发序列中的类Zeno行为将被排除.
证明. 易知排除类Zeno行为的关键是要证明不等式$k_{p + 1}^i - k_p^i > 1$成立.根据事件触发机制可知, 下一个触发时刻将会发生在触发函数(4)大于0时.进而可得到如下不等式
$ \begin{align} &\left| {{e_{bi}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{ci}}\left( {k_{p + 1}^i} \right)} \right| + \left| {{e_{gi}}\left( {k_{p + 1}^i} \right)} \right|\ge\nonumber\\ &\qquad{\delta _1}\left| {{b_i}\left( {k_p^i} \right)} \right| + {\delta _1}\left| {{c_i}\left( {k_p^i} \right)} \right| +\nonumber\\ &\qquad {\delta _1}\left| {{g_i}\left( {k_p^i} \right)} \right| + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{align} $
(20) 定义, .结合式(20), 可得到下式
$ \begin{equation} {G_i}\left( {k_{p + 1}^i} \right) \ge {\delta _1}{H_i}\left( {k_p^i} \right) + {\delta _2}{\beta ^{k_{p + 1}^i}} \end{equation} $
(21) 结合式(16)和式(21)可得
$ \begin{align} {\delta _2}{\beta ^{k_{p + 1}^i}} &\le {G_i}\left( {k_{p + 1}^i} \right) - {\delta _1}{H_i}\left( {k_p^i} \right)\le\nonumber\\ & \left\| L \right\|\left( {\left\| {\psi \left( {k_p^i} \right)} \right\| + \left\| {\psi \left( {k_{p + 1}^i} \right)} \right\|} \right)\le\nonumber\\ & W\left\| L \right\|\left( {{\beta ^{k_p^i}} + {\beta ^{k_{p + 1}^i}}} \right) \end{align} $
(22) 求解上式得
$ \begin{equation} \left( {{\delta _2} - \left\| L \right\|W} \right){\beta ^{k_{p + 1}^i}} \le \left\| L \right\|W{\beta ^{k_p^i}} \end{equation} $
(23) 根据式(23)可得
$ \begin{equation} k_{p + 1}^i - k_p^i > \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}} } {\ln \beta } \end{equation} $
(24) 基于(24)易知当时, 有如下不等式成立
$ \begin{equation} \dfrac{{\ln \dfrac{{W\left\| L \right\|}}{{{\delta _2} - W\left\| L \right\|}}}} {\ln \beta } > 1 \end{equation} $
(25) 此外, 因为$W = M\left\| {\psi \left(0 \right)} \right\|$以及
$ \begin{equation} {\delta _1} > \frac{{\left( {\beta - \alpha } \right)}}{{\left( {\beta - \alpha } \right) + 3\sqrt {6n\left( {n - 1} \right)} M\left\| {{Q_{\rm{2}}}} \right\|\left\| L \right\|}} \end{equation} $
(26) 又可以得出
$ \begin{equation} {\delta _2} > \frac{{\left\| L \right\|\left\| {\psi \left( 0 \right)} \right\|M\left( {1 + \beta } \right)}}{\beta } = \frac{{\left\| L \right\|W\left( {1 + \beta } \right)}}{\beta } \end{equation} $
(27) 该式意味着式(25)成立, 又结合式(24)易知$k_{p + 1}^i - k_p^i > 1$, 即排除类Zeno行为的条件得已满足.
注2.类Zeno行为广泛存在于基于事件触发控制机制的离散系统中.然而, 当前极少有文献研究如何排除类Zeno行为, 尤其是对于三阶多智能体动态模型.定理2给出了排除三阶离散多智能体系统的类Zeno行为的参数条件.
3. 仿真实验
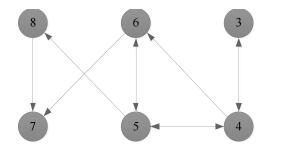
本部分将利用一个仿真实验来验证本文所提算法及理论的正确性和有效性.假设三阶离散多智能体系统(1)包含6个智能体, 且有向加权通信拓扑结构如图 1所示, 权重取值为0或1, 可以明显地看出该图包含有向生成树(满足假设1).
通过简单的计算可得, ${\mu _1} = 0$, ${\mu _2} = 0.6852$, ${\mu _3} = 1.5825 + 0.3865$i, ${\mu _4} = 1.5825 - 0.3865$i, ${\mu _5} = 3.2138$, ${\mu _6} = 3.9360$.令$M = 1$, 结合定理1和定理2可得到$0.035 < {\delta _1} < 1$, ${\delta _2} > 44.0025$, $0 < \alpha < \beta < 1$.令${\delta _1} = 0.2$, ${\delta _2} = 200$, $\alpha = 0.6$, $\beta = 0.9$, $\lambda = 0.02$, $\eta = 0.3$, $\gamma = 0.5$, 不难验证满足引理1的条件并且计算可知$\rho \left({{Q_1}} \right) = 0.9958 < 1$.三阶离散多智能体系统(1)的一致性结果如图 2~图 6所示.根据定理1可知, 基于控制器(2)和事件触发函数(4)的系统(1)能实现一致.从图 2~图 6可以看出, 仿真结果与理论分析符合.
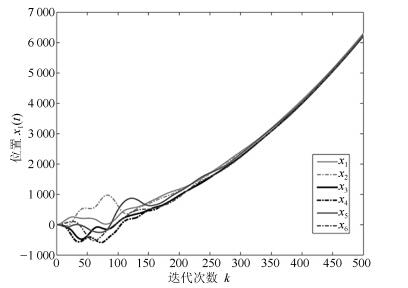 图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems
图 2 三阶离散多智能体系统的位置轨迹图Fig. 2 The trajectories of position in third-order discrete-time multi-agent systems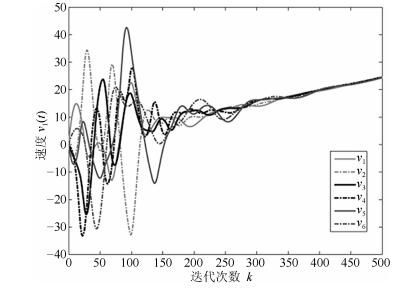 图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems
图 3 三阶离散多智能体系统的速度轨迹图Fig. 3 The trajectories of speed in third-order discrete-time multi-agent systems 图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems
图 4 三阶离散多智能体系统的加速度轨迹图Fig. 4 The trajectories of acceleration in third-order discrete-time multi-agent systems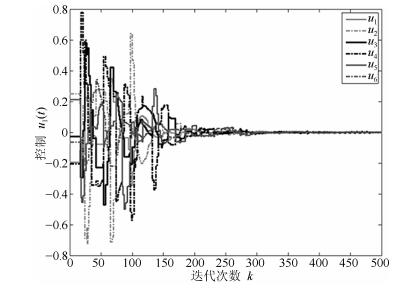 图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems
图 5 三阶离散多智能体系统的控制轨迹图Fig. 5 The trajectories of control in third-order discrete-time multi-agent systems图 2~图 4分别表征了系统(1)中所有智能体的位置、速度和加速度的轨迹, 从图中可以看出以上3个变量确实达到了一致.图 5展示了控制输入的轨迹.为了更清楚地体现事件触发机制的优点, 图 6给出了0$ \sim $100次迭代内的各智能体的触发时刻轨迹.从图 6可以看出, 本文设计的事件触发协议确实达到了减少更新次数, 节省资源的目的.
4. 结论
针对三阶离散多智能体系统的一致性问题, 构造了一个新颖的事件触发一致性协议, 分析得到了在通信拓扑为有向加权图且包含生成树的条件下, 系统中所有智能体的位置状态、速度状态和加速度状态渐近收敛到一致状态的充分条件.同时, 该条件指出了通信拓扑的Laplacian矩阵特征值和系统的耦合强度对系统一致性的影响.另外, 给出了排除类Zeno行为的参数条件.仿真实验结果也验证了上述结论的正确性.将文中获得的结论扩展到拓扑结构随时间变化的更高阶多智能体网络是极有意义的.这将是未来研究的一个具有挑战性的课题.
-
[1] Himmelblau D M. Fault Detection and Diagnosis in Chemical and Petrochemical Processes. New York: Elsevier, 1978. [2] Ren L, Xu Z Y, Yan X Q. Single-sensor incipient fault detection. IEEE Sensors Journal, 2011, 11(9): 2102-2107 doi: 10.1109/JSEN.2010.2093879 [3] Amar M, Gondal I, Wilson C. Vibration spectrum imaging: a novel bearing fault classification approach. IEEE Transactions on Industrial Electronics, 2015, 62(1): 494-502 doi: 10.1109/TIE.2014.2327555 [4] Li B, Chow M Y, Tipsuwan Y, Hung J C. Neural-network-based motor rolling bearing fault diagnosis. IEEE Transactions on Industrial Electronics, 2000, 47(5): 1060-1069 doi: 10.1109/41.873214 [5] Demetriou M A, Polycarpou M M. Incipient fault diagnosis of dynamical systems using online approximators. IEEE Transactions on Automatic Control, 1998, 43(11): 1612-1617 doi: 10.1109/9.728881 [6] Naderi M S, Gharehpetian G B, Abedi M, Blackburn T R. Modeling and detection of transformer internal incipient fault during impulse test. IEEE Transactions on Dielectrics and Electrical Insulation, 2008, 15(1): 284-291 doi: 10.1109/T-DEI.2008.4446762 [7] Oda T, Katoh E. Fault Diagnosis Expert System, U.S. Patent 5127005, June 1992. [8] Yan R Q, Gao R X, Chen X F. Wavelets for fault diagnosis of rotary machines: a review with applications. Signal Processing, 2014, 96: 1-15 doi: 10.1016/j.sigpro.2013.04.015 [9] Chiang L H, Russell E L, Braatz R D. Fault diagnosis in chemical processes using Fisher discriminant analysis, discriminant partial least squares, and principal component analysis. Chemometrics and Intelligent Laboratory Systems, 2000, 50(2): 243-252 doi: 10.1016/S0169-7439(99)00061-1 [10] Yoon S, MacGregor J F. Fault diagnosis with multivariate statistical models, part I: using steady state fault signatures. Journal of Process Control, 2001, 11(4): 387-400 doi: 10.1016/S0959-1524(00)00008-1 [11] Wong P K, Yang Z X, Vong C M, Zhong J H. Real-time fault diagnosis for gas turbine generator systems using extreme learning machine. Neurocomputing, 2014, 128: 249-257 doi: 10.1016/j.neucom.2013.03.059 [12] Li K, Zhang Y L, Li Z X. Application research of Kalman filter and SVM applied to condition monitoring and fault diagnosis. Applied Mechanics and Materials, 2012, 121-126: 268-272 http://cn.bing.com/academic/profile?id=2015215546&encoded=0&v=paper_preview&mkt=zh-cn [13] 李娟, 周东华, 司小胜, 陈茂银, 徐春红. 微小故障诊断方法综述. 控制理论与应用, 2012, 29(12): 1517-1529 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201212000.htmLi Juan, Zhou Dong-Hua, Si Xiao-Sheng, Chen Mao-Yin, Xu Chun-Hong. Review of incipient fault diagnosis methods. Control Theory and Applications, 2012, 29(12): 1517-1529 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201212000.htm [14] Ren W, Beard R W. Consensus algorithms for double-integrator dynamics. Distributed Consensus in Multi-vehicle Cooperative Control: Theory and Application. London: Springer, 2008. 77-104 [15] Venkatasubramanian V, Rengaswamy R, Yin K, Kavuri S N. A review of process fault detection and diagnosis: Part I: quantitative model-based methods. Computers and Chemical Engineering, 2003, 27(3): 293-311 doi: 10.1016/S0098-1354(02)00160-6 [16] 李晗, 萧德云. 基于数据驱动的故障诊断方法综述. 控制与决策, 2011, 26(1): 1-9 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201101002.htmLi Han, Xiao De-Yun. Survey on data driven fault diagnosis methods. Control and Decision, 2011, 26(1): 1-9 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201101002.htm [17] Pearson K. Principal components analysis. The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science, 1901, 6(2): 559 [18] Bartlett M S. Multivariate analysis. Supplement to the Journal of the Royal Statistical Society, 1947, 9(2): 176-197 doi: 10.2307/2984113 [19] Wiesel A, Hero A O. Decomposable principal component analysis. IEEE Transactions on Signal Processing, 2009, 57(11): 4369-4377 doi: 10.1109/TSP.2009.2025806 [20] Wise B M, Ricker N L, Veltkamp D F, Kowalski B R. A theoretical basis for the use of principal component models for monitoring multivariate processes. Process Control and Quality, 1990, 1(1): 41-51 http://cn.bing.com/academic/profile?id=99506905&encoded=0&v=paper_preview&mkt=zh-cn [21] Kaistha N, Upadhyaya B R. Incipient fault detection and isolation in a PWR plant using principal component analysis. In: Proceedings of the 2001 American Control Conference. Arlington, VA, USA: IEEE, 2001. 2119-2120 [22] Zhao J S, Huang J C, Sun W. On-line early fault detection and diagnosis of municipal solid waste incinerators. Waste Management, 2008, 28(11): 2406-2414 doi: 10.1016/j.wasman.2007.11.014 [23] 葛志强, 杨春节, 宋执环. 基于MEWMA-PCA的微小故障检测方法研究及其应用. 信息与控制, 2007, 36(5): 650-656Ge Zhi-Qiang, Yang Chun-Jie, Song Zhi-Huan. Research and application of small shifts detection method based on MEWMA-PCA. Information and Control, 2007, 36(5): 650-656 [24] 文成林, 胡静, 王天真, 陈志国. 相对主元分析及其在数据压缩和故障诊断中的应用研究. 自动化学报, 2008, 34(9): 1128-1139 http://www.aas.net.cn/CN/abstract/abstract17975.shtmlWen Cheng-Lin, Hu Jing, Wang Tian-Zhen, Chen Zhi-Guo. Relative PCA with applications of data compression and fault diagnosis. Acta Automatica Sinica, 2008, 34(9): 1128-1139 http://www.aas.net.cn/CN/abstract/abstract17975.shtml [25] Zhou F N, Tang T H, Wen C L. DCA based multi-level small fault diagnosis. In: Proceedings of the 11th IEEE International Conference on Communication Technology. Hangzhou, China: IEEE, 2008. 486-489 [26] Harmouche J, Delpha C, Diallo D. Incipient fault detection and diagnosis based on Kullback-Leibler divergence using principal component analysis: Part I. Signal Processing, 2014, 94: 278-287 doi: 10.1016/j.sigpro.2013.05.018 [27] Harmouche J, Delpha C, Diallo D. Incipient fault detection and diagnosis based on Kullback-Leibler divergence using principal component analysis: Part II. Signal Processing, 2015, 109: 334-344 doi: 10.1016/j.sigpro.2014.06.023 [28] Comon P. Independent component analysis. Higher-Order Statistics. Amsterdam: Elsevier, 1992. 29-38 [29] Kano M, Tanaka S, Hasebe S, Hashimoto I, Ohno H. Monitoring independent components for fault detection. AIChE Journal, 2003, 49(4): 969-976 doi: 10.1002/(ISSN)1547-5905 [30] Ge Z Q, Song Z H. Process monitoring based on independent component analysis——principal component analysis (ICA-PCA) and similarity factors. Industrial and Engineering Chemistry Research, 2007, 46(7): 2054-2063 doi: 10.1021/ie061083g [31] Tian X H, Lin J, Fyfe K R, Zuo M J. Gearbox fault diagnosis using independent component analysis in the frequency domain and wavelet filtering. In: Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing. Hong Kong, China: IEEE, 2003. II-245-II-248 [32] He Q B, Du R X, Kong F R. Phase space feature based on independent component analysis for machine health diagnosis. Journal of Vibration and Acoustics, 2012, 134(2): 021014 doi: 10.1115/1.4005006 [33] Ge Z Q, Xie L, Kruger U, Song Z H. Local ICA for multivariate statistical fault diagnosis in systems with unknown signal and error distributions. AIChE Journal, 2012, 58(8): 2357-2372 doi: 10.1002/aic.12760 [34] Guo Y, Wu X, Na J, Fung R F. Incipient faults identification in gearbox by combining Kurtogram and independent component analysis. Applied Mechanics and Materials, 2015, 764-765: 309-313 doi: 10.4028/www.scientific.net/AMM.764-765 [35] Abdi H. Partial least square regression. Encyclopedia for Research Methods for the Social Sciences. Thousand Oaks: Sage, 2003. 792-795 [36] Kresta J V, Macgregor J F, Marlin T E. Multivariate statistical monitoring of process operating performance. Canadian Journal of Chemical Engineering, 1991, 69(1): 35-47 doi: 10.1002/cjce.v69:1 [37] Vigneau E, Bertrand D, Qannari E M. Application of latent root regression for calibration in near-infrared spectroscopy. Comparison with principal component regression and partial least squares. Chemometrics and Intelligent Laboratory Systems, 1996, 35(2): 231-238 doi: 10.1016/S0169-7439(96)00051-2 [38] Komulainen T, Sourander M, Jämsä-Jounela S L. An online application of dynamic PLS to a dearomatization process. Computers and Chemical Engineering, 2004, 28(12): 2611-2619 doi: 10.1016/j.compchemeng.2004.07.014 [39] Qin S J, Zheng Y Y. Quality-relevant and process-relevant fault monitoring with concurrent projection to latent structures. AIChE Journal, 2013, 59(2): 496-504 doi: 10.1002/aic.v59.2 [40] Kruger U, Dimitriadis G. Diagnosis of process faults in chemical systems using a local partial least squares approach. AIChE Journal, 2008, 54(10): 2581-2596 doi: 10.1002/aic.v54:10 [41] Zhang X D, Polycarpou M M, Parisini T. Fault diagnosis of a class of nonlinear uncertain systems with Lipschitz nonlinearities using adaptive estimation. Automatica, 2010, 46(2): 290-299 doi: 10.1016/j.automatica.2009.11.014 [42] Harmouche J, Delpha C, Diallo D. Incipient fault amplitude estimation using KL divergence with a probabilistic approach. Signal Processing, 2016, 120: 1-7 doi: 10.1016/j.sigpro.2015.08.008 [43] Lee D D, Seung H S. Learning the parts of objects by non-negative matrix factorization. Nature, 1999, 401(6755): 788-791 doi: 10.1038/44565 [44] Hoyer P O. Non-negative sparse coding. In: Proceedings of the 12th IEEE Workshop on Neural Networks for Signal Processing. Martigny, Switzerland: IEEE, 2002. 557-565 [45] Tangirala A K, Kanodia J, Shah S L. Non-negative matrix factorization for detection and diagnosis of plantwide oscillations. Industrial and Engineering Chemistry Research, 2007, 46(3): 801-817 doi: 10.1021/ie0602299 [46] Wang Q H, Zhang Y Y, Cai L, Zhu Y S. Fault diagnosis for diesel valve trains based on non-negative matrix factorization and neural network ensemble. Mechanical Systems and Signal Processing, 2009, 23(5): 1683-1695 doi: 10.1016/j.ymssp.2008.12.004 [47] Li B, Zhang P L, Liu D S, Mi S S, Ren G Q, Tian H. Feature extraction for rolling element bearing fault diagnosis utilizing generalized S transform and two-dimensional non-negative matrix factorization. Journal of Sound and Vibration, 2011, 330(10): 2388-2399 doi: 10.1016/j.jsv.2010.11.019 [48] Kirchgässner G, Wolters J. Introduction to Modern Time Series Analysis. Berlin Heidelberg: Springer, 2007. 2-5 [49] Cong F Y, Chen J, Dong G M, Zhao F G. Short-time matrix series based singular value decomposition for rolling bearing fault diagnosis. Mechanical Systems and Signal Processing, 2013, 34(1-2): 218-230 doi: 10.1016/j.ymssp.2012.06.005 [50] Menon S, Uluyol Ö, Kim K, Nwadiogbu E O. Incipient fault detection and diagnosis in turbine engines using hidden Markov models. In: Proceedings of the 2003 ASME Turbo Expo, Collocated with the 2003 International Joint Power Generation Conference. Arlington, Georgia, USA: ASME, 2003. 493-500 [51] Purushotham V, Narayanan S, Prasad S A N. Multi-fault diagnosis of rolling bearing elements using wavelet analysis and hidden Markov model based fault recognition. NDT and E International, 2005, 38(8): 654-664 doi: 10.1016/j.ndteint.2005.04.003 [52] Li Z F, Fang H J, Xia L S. Increasing mapping based hidden Markov model for dynamic process monitoring and diagnosis. Expert Systems with Applications, 2014, 41(2): 744-751 doi: 10.1016/j.eswa.2013.07.098 [53] Bhatnagar S, Rajagopalan V, Ray A. Incipient fault detection in mechanical power transmission systems. In: Proceedings of the 2005 American Control Conference. Portland, OR: IEEE, 2005. 472-477 [54] D'Angelo M F S V, Palhares R M, Takahashi R H C, Loschi R H, Baccarini L M R, Caminhas W M. Incipient fault detection in induction machine stator-winding using a fuzzy-Bayesian change point detection approach. Applied Soft Computing, 2011, 11(1): 179-192 doi: 10.1016/j.asoc.2009.11.008 [55] Barman D, Sarkar S, Das G, Das S, Purkait P. DFA and DWT based severity detection and discrimination of induction motor stator winding short circuit fault from incipient insulation failure. In: Proceedings of the 2015 International Conference on Electrical, Electronics, Signals, Communication, and Optimization. Visakhapatnam: IEEE, 2015. 1-6 [56] Liu H C, Liu L, Bian Q H, Lin Q L, Dong N, Xu P C. Failure mode and effects analysis using fuzzy evidential reasoning approach and grey theory. Expert Systems with Applications, 2011, 38(4): 4403-4415 doi: 10.1016/j.eswa.2010.09.110 [57] Wang M H. Grey-extension method for incipient fault forecasting of oil-immersed power transformer. Electric Power Components and Systems, 2004, 32(10): 959-975 doi: 10.1080/15325000490257999 [58] Lin C H, Chen J L, Huang P Z. Dissolved gases forecast to enhance oil-immersed transformer fault diagnosis with grey prediction-clustering analysis. Expert Systems, 2011, 28(2): 123-137 doi: 10.1111/exsy.2011.28.issue-2 [59] Wang M H, Tsai H H. Fuel cell fault forecasting system using grey and extension theories. IET Renewable Power Generation, 2012, 6(6): 373-380 doi: 10.1049/iet-rpg.2012.0147 [60] Qiao W, Lu D G. A survey on wind turbine condition monitoring and fault diagnosis——part II: signals and signal processing methods. IEEE Transactions on Industrial Electronics, 2015, 62(10): 6546-6557 doi: 10.1109/TIE.2015.2422394 [61] Daubechies I. Ten Lectures on Wavelets. Philadelphia: Society for Industrial and Applied Mathematics, 1992. [62] Rubini R, Meneghetti U. Application of the envelope and wavelet transform analyses for the diagnosis of incipient faults in ball bearings. Mechanical Systems and Signal Processing, 2001, 15(2): 287-302 doi: 10.1006/mssp.2000.1330 [63] Saravanan N, Ramachandran K I. Incipient gear box fault diagnosis using discrete wavelet transform (DWT) for feature extraction and classification using artificial neural network (ANN). Expert Systems with Applications, 2010, 37(6): 4168-4181 doi: 10.1016/j.eswa.2009.11.006 [64] Sun W, Yang G A, Chen Q, Palazoglu A, Feng K. Fault diagnosis of rolling bearing based on wavelet transform and envelope spectrum correlation. Journal of Vibration and Control, 2013, 19(6): 924-941 doi: 10.1177/1077546311435348 [65] 罗荣, 田福庆, 李克玉, 丁庆喜. 卷积型小波变换实现及机械早期故障诊断应用. 振动与冲击, 2013, 32(7): 64-69 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201307015.htmLuo Rong, Tian Fu-Qing, Li Ke-Yu, Ding Qing-Xi. Realization of convolution wavelet transformation and its application in mechanical incipient fault diagnosis. Journal of Vibration and Shock, 2013, 32(7): 64-69 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ201307015.htm [66] Sugumaran V, Rao A V, Ramachandran K I. A comprehensive study of fault diagnostics of roller bearings using continuous wavelet transform. International Journal of Manufacturing Systems and Design, 2015, 1(1): 27-46 [67] Kay S M, Marple S L Jr. Spectrum analysis——a modern perspective. Proceedings of the IEEE, 1981, 69(11): 1380-1419 doi: 10.1109/PROC.1981.12184 [68] Feng Z P, Chen X W, Liang M. Joint envelope and frequency order spectrum analysis based on iterative generalized demodulation for planetary gearbox fault diagnosis under nonstationary conditions. Mechanical Systems and Signal Processing, 2016, 76-77: 242-264 doi: 10.1016/j.ymssp.2016.02.047 [69] Drago R J. Incipient failure detection. Power Transmission Design, 1979, 21(2): 40-45 http://cn.bing.com/academic/profile?id=776794878&encoded=0&v=paper_preview&mkt=zh-cn [70] Nandi S, Toliyat H A, Li X. Condition monitoring and fault diagnosis of electrical motors——a review. IEEE Transactions on Energy Conversion, 2005, 20(4): 719-729 doi: 10.1109/TEC.2005.847955 [71] Oh J E, Kim W T, Sim H J, Lee J Y. Advanced multidimensional spectral analysis and its application for early fault detection. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2006, 220(4): 435-444 doi: 10.1243/09544070JAUTO25 [72] Muruganatham B, Sanjith M A, Krishnakumar B, Satya Murty S A V. Roller element bearing fault diagnosis using singular spectrum analysis. Mechanical Systems and Signal Processing, 2013, 35(1-2): 150-166 doi: 10.1016/j.ymssp.2012.08.019 [73] Xie S L, Zhang Y H, Xie Q, Chen C H, Zhang X N. Identification of high frequency loads using statistical energy analysis method. Mechanical Systems and Signal Processing, 2013, 35(1-2): 291-306 doi: 10.1016/j.ymssp.2012.08.028 [74] Elsner J B, Tsonis A A. Singular Spectrum Analysis: A New Tool in Time Series Analysis. New York: Springer Science & Business Media, 1996. [75] Huang N E, Shen Z, Long S R, Wu M C, Shi H H, Zheng Q A, Yen N C, Tung C C, Liu H H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, 1998, 454(1971): 903-995 doi: 10.1098/rspa.1998.0193 [76] Flandrin P, Rilling G, Goncalves P. Empirical mode decomposition as a filter bank. IEEE Signal Processing Letters, 2004, 11(2): 112-114 doi: 10.1109/LSP.2003.821662 [77] Elbouchikhi E, Choqueuse V, Trachi Y, Benbouzid M. Induction machine bearing faults detection based on Hilbert-Huang transform. In: Proceedings of the 24th IEEE International Symposium on Industrial Electronics. Buzios: IEEE, 2015. 843-848 [78] Liang J, Yang Z X. A novel wavelet transform——empirical mode decomposition based sample entropy and SVD approach for acoustic signal fault diagnosis. In: Proceedings of the 6th International Conference on Advances in Swarm and Computational Intelligence. Beijing, China: Springer International Publishing, 2015. 232-241 [79] Yan J H, Lu L. Improved Hilbert-Huang transform based weak signal detection methodology and its application on incipient fault diagnosis and ECG signal analysis. Signal Processing, 2014, 98: 74-87 doi: 10.1016/j.sigpro.2013.11.012 [80] Lei Y G, Lin J, He Z J, Zuo M J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mechanical Systems and Signal Processing, 2013, 35(1-2): 108-126 doi: 10.1016/j.ymssp.2012.09.015 [81] Giardina C R, Dougherty E R. Morphological Methods in Image and Signal Processing. Englewood Cliffs: Prentice Hall, 1988. [82] Zhang L J, Xu J W, Yang J H, Yang D B, Wang D D. Multiscale morphology analysis and its application to fault diagnosis. Mechanical Systems and Signal Processing, 2008, 22(3): 597-610 doi: 10.1016/j.ymssp.2007.09.010 [83] He W, Jiang Z N, Qin Q. A joint adaptive wavelet filter and morphological signal processing method for weak mechanical impulse extraction. Journal of Mechanical Science and Technology, 2010, 24(8): 1709-1716 doi: 10.1007/s12206-010-0511-4 [84] Dong Y B, Liao M F, Zhang X L, Wang F Z. Faults diagnosis of rolling element bearings based on modified morphological method. Mechanical Systems and Signal Processing, 2011, 25(4): 1276-1286 doi: 10.1016/j.ymssp.2010.10.008 [85] Li B, Zhang P L, Wang Z J, Mi S S, Zhang Y T. Gear fault detection using multi-scale morphological filters. Measurement, 2011, 44(10): 2078-2089 doi: 10.1016/j.measurement.2011.08.010 [86] Li B, Zhang P L, Wang Z J, Mi S S, Liu D S. A weighted multi-scale morphological gradient filter for rolling element bearing fault detection. ISA Transactions, 2011, 50(4): 599-608 doi: 10.1016/j.isatra.2011.06.003 [87] McCulloch W S, Pitts W. A logical calculus of the ideas immanent in nervous activity. The Bulletin of Mathematical Biophysics, 1943, 5(4): 115-133 doi: 10.1007/BF02478259 [88] Watanabe K, Matsuura I, Abe M, Kubota M, Himmelblau D M. Incipient fault diagnosis of chemical processes via artificial neural networks. AIChE Journal, 1989, 35(11): 1803-1812 doi: 10.1002/(ISSN)1547-5905 [89] Chow M Y, Mangum P, Thomas R J. Incipient fault detection in DC machines using a neural network. In: Proceedings of the 22nd Asilomar Conference on Signals, Systems, and Computers. Pacific Grove, CA: IEEE, 1988. 706-709 [90] Zakaria F, Johari D, Musirin I. Artificial neural network (ANN) application in dissolved gas analysis (DGA) methods for the detection of incipient faults in oil-filled power transformer. In: Proceedings of the 2012 IEEE International Conference on Control System, Computing, and Engineering. Penang, Malaysia: IEEE, 2012. 328-332 [91] Bhalla D, Bansal R K, Gupta H O. Function analysis based rule extraction from artificial neural networks for transformer incipient fault diagnosis. International Journal of Electrical Power and Energy Systems, 2012, 43(1): 1196-1203 doi: 10.1016/j.ijepes.2012.06.042 [92] Bhowmik P S, Pradhan S, Prakash M, Roy S. Investigation of wavelets and radial basis function neural network for incipient fault diagnosis in induction motors. In: Proceedings of the 2013 International Conference on Circuits, Controls, and Communications. Bengaluru: IEEE, 2013. 1-5 [93] Zhang Z Y, Wang Y, Wang K S. Fault diagnosis and prognosis using wavelet packet decomposition, Fourier transform and artificial neural network. Journal of Intelligent Manufacturing, 2013, 24(6): 1213-1227 doi: 10.1007/s10845-012-0657-2 [94] Hornik K, Stinchcombe M, White H. Multilayer feed forward networks are universal approximators. Neural Networks, 1989, 2(5): 359-366 doi: 10.1016/0893-6080(89)90020-8 [95] Cortes C, Vapnik V. Support-vector networks. Machine Learning, 1995, 20(3): 273-297 [96] Widodo A, Yang B S. Support vector machine in machine condition monitoring and fault diagnosis. Mechanical Systems and Signal Processing, 2007, 21(6): 2560-2574 doi: 10.1016/j.ymssp.2006.12.007 [97] Wei C H, Tang W H, Wu Q H. A hybrid least-square support vector machine approach to incipient fault detection for oil-immersed power transformer. Electric Power Components and Systems, 2014, 42(5): 453-463 doi: 10.1080/15325008.2013.857180 [98] Namdari M, Jazayeri-Rad H. Incipient fault diagnosis using support vector machines based on monitoring continuous decision functions. Engineering Applications of Artificial Intelligence, 2014, 28: 22-35 doi: 10.1016/j.engappai.2013.11.013 [99] Fernández-Francos D, Martínez-Rego D, Fontenla-Romero O, Alonso-Betanzos A. Automatic bearing fault diagnosis based on one-class ν-SVM. Computers and Industrial Engineering, 2013, 64(1): 357-365 doi: 10.1016/j.cie.2012.10.013 [100] Huang G B, Zhu Q Y, Siew C K. Extreme learning machine: theory and applications. Neurocomputing, 2006, 70(1-3): 489-501 doi: 10.1016/j.neucom.2005.12.126 [101] Hu X F, Zhao Z, Wang S, Wang F L, He D K, Wu S K. Multi-stage extreme learning machine for fault diagnosis on hydraulic tube tester. Neural Computing and Applications, 2008, 17(4): 399-403 doi: 10.1007/s00521-007-0139-1 [102] Tian Y, Ma J, Lu C, Wang Z L. Rolling bearing fault diagnosis under variable conditions using LMD-SVD and extreme learning machine. Mechanism and Machine Theory, 2015, 90: 175-186 doi: 10.1016/j.mechmachtheory.2015.03.014 [103] Zadeh L A. Fuzzy sets. Information and Control, 1965, 8(3): 338-353 doi: 10.1016/S0019-9958(65)90241-X [104] Isermann R. On fuzzy logic applications for automatic control, supervision, and fault diagnosis. IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, 1998, 28(2): 221-235 doi: 10.1109/3468.661149 [105] Chow M Y. Methodologies of Using Neural Network and Fuzzy Logic Technologies for Motor Incipient Fault Detection. River Edge, NJ, USA: World Scientific, 1997. [106] Lou X S, Loparo K A. Bearing fault diagnosis based on wavelet transform and fuzzy inference. Mechanical Systems and Signal Processing, 2004, 18(5): 1077-1095 doi: 10.1016/S0888-3270(03)00077-3 [107] Yang B S, Oh M S, Tan A C C. Fault diagnosis of induction motor based on decision trees and adaptive neuro-fuzzy inference. Expert Systems with Applications, 2009, 36(2): 1840-1849 doi: 10.1016/j.eswa.2007.12.010 [108] 周东华, 刘洋, 何潇. 闭环系统故障诊断技术综述. 自动化学报, 2013, 39(11): 1933-1943 doi: 10.3724/SP.J.1004.2013.01933Zhou Dong-Hua, Liu Yang, He Xiao. Review on fault diagnosis techniques for closed-loop systems. Acta Automatica Sinica, 2013, 39(11): 1933-1943 doi: 10.3724/SP.J.1004.2013.01933 [109] McNabb C A, Qin S J. Fault diagnosis in the feedback-invariant subspace of closed-loop systems. Industrial and Engineering Chemistry Research, 2005, 44(8): 2359-2368 doi: 10.1021/ie049570o [110] 高敬礼, 文成林, 刘妹琴. 基于奇异值分解和叠加法的慢速小目标检测算法. 上海交通大学学报, 2015, 49(6): 876-883 http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201506023.htmGao Jing-Li, Wen Cheng-Lin, Liu Mei-Qin. Low-speed small target detection based on SVD and superposition. Journal of Shanghai Jiaotong University, 2015, 49(6): 876-883 http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT201506023.htm [111] Lv F Y, Wen C L, Bao Z J, Liu M Q. Fault diagnosis based on deep learning. In: Proceedings of the 2016 American Control Conference (ACC2016), Boston, MA, USA: IEEE, 2016. 6851-6856 [112] Li C L, Hu S Y, Gao S H, Tang J. Real-time grayscale-thermal tracking via Laplacian sparse representation. In: Proceedings of the 22nd International Conference on MultiMedia Modeling. Miami, FL, USA: Springer International Publishing, 2016. 54-65 [113] Xu Y, Zhang Z, Lu G M, Yang J. Approximately symmetrical face images for image preprocessing in face recognition and sparse representation based classification. Pattern Recognition, 2016, 54: 68-82 doi: 10.1016/j.patcog.2015.12.017 [114] Namias V. The fractional order Fourier transform and its application to quantum mechanics. IMA Journal of Applied Mathematics, 1980, 25(3): 241-265 doi: 10.1093/imamat/25.3.241 [115] Ozaktas H M, Ankan O, Kutay M A, Bozdagt G. Digital computation of the fractional Fourier transform. IEEE Transactions on Signal Processing, 1996, 44(9): 2141-2150 doi: 10.1109/78.536672 [116] 高哲, 廖晓钟. 一种线性分数阶系统稳定性的频域判别准则. 自动化学报, 2011, 37(11): 1387-1394 http://www.aas.net.cn/CN/abstract/abstract17628.shtmlGao Zhe, Liao Xiao-Zhong. A stability criterion for linear fractional order systems in frequency domain. Acta Automatica Sinica, 2011, 37(11): 1387-1394 http://www.aas.net.cn/CN/abstract/abstract17628.shtml [117] Lin L F, Wang H Q, Lv W Y, Zhong S C. A novel parameter-induced stochastic resonance phenomena in fractional Fourier domain. Mechanical Systems and Signal Processing, 2016, 76-77: 771-779 doi: 10.1016/j.ymssp.2016.02.016 -

 下载:
下载:

 下载:
下载:
计量
- 文章访问数: 4682
- HTML全文浏览量: 1648
- PDF下载量: 3126
- 被引次数: 0
