

-
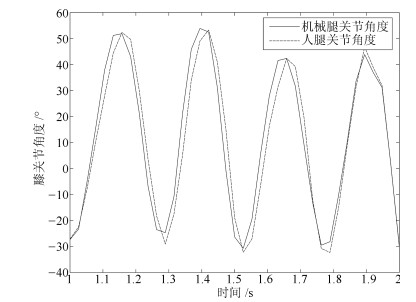
摘要: 针对膝关节外骨骼机械腿运动过程中对操作者的运动跟随问题,提出了一种基于导纳原理的等效惯量补偿控制方法.设计导纳控制器将外骨骼与操作者间的交互力矩转化为期望的运动轨迹;通过低通滤波加速度与惯量增益的乘积形成的闭环反馈实现等效惯量补偿;结合腿部肌肉表面肌电信号进行人体摆腿运动换向的预判,实施膝关节外骨骼机械腿的摆动控制,实验结果表明,膝关节外骨骼与受试者之间的关节角度相对误差为±12%,膝关节外骨骼机械腿对受试者的摆腿运动能实现较好的运动跟随.Abstract: To solve the problem of the operator's movement tracking during the rehabilitation training of knee joint exoskeleton, an emulated inertia compensation control method is presented, which is based on admittance control. An admittance controller that can convert the interactive torque between exoskeleton and operator to the desired trajectory is designed. A closed-loop feedback is given by the product of the low-pass filtering acceleration and inertia gain to achieve the emulated inertia compensation. Combined with the leg muscle surface EMG signal, the reverse of leg swing movement is distinguished, and then the implementation of the knee joint exoskeleton's swing control is done. Experimental results show that the relative error of joint angle is ±12%, and that the knee joint exoskeleton can pursuit the operators movement very well.
-
-

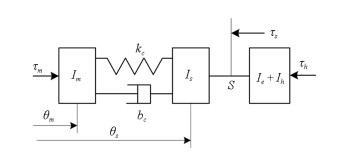
图 3 基于惯量补偿的导纳控制系统图
Fig. 3 The admittance control block diagram based on emulated inertia compensation
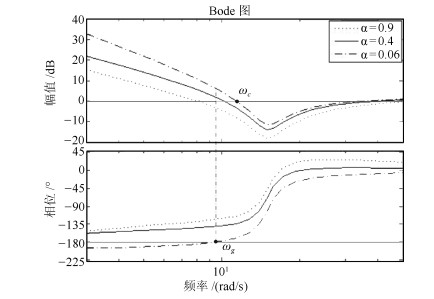
图 4 开环传递函数$Y_{e}^{p}(s)Z_{h}(s)$的幅值相位图
Fig. 4 Frequency-response plots of the open loop transfer function $Y_{e}^{p}(s)Z_{h}(s)$
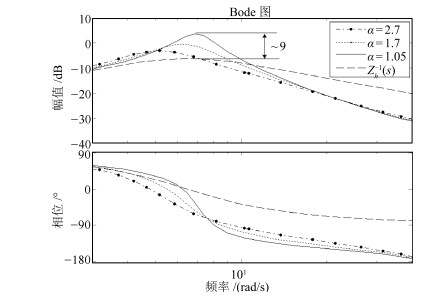
图 5 耦合人腿的外骨骼闭环系统$Y_{e}^{h}(s)$的幅值相位图
Fig. 5 Frequency-response plots of the close loop transfer function $Y_{e}^{h}(s)$ of the coupled human limb-exoskeleton system

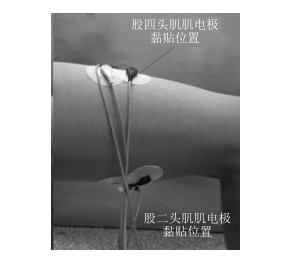
图 7 股二头肌及股四头肌的肌电信号与膝关节角度变化关系图
Fig. 7 EMG single of the biceps and quadriceps femoris muscle and knee joint angle
-
[1] Yan T F, Cempini M, Oddo C M O, Vitiello N V. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robotics and Autonomous Systems, 2014, 64:120-136 http://www.docin.com/p-1048805869.html [2] Robert B. Exoskeletons and robotic prosthetics:a review of recent developments. Industrial Robot:An International Journal, 2009, 36(5):421-427 doi: 10.1108/01439910910980141 [3] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [4] Rene J F, Verlinden O. Review of control algorithms for robotic ankle systems in lower-limb orthoses, prostheses, and exoskeletons. Medical Engineering & Physics, 2011, 34(4):397-408 https://www.researchgate.net/publication/51896474_Review_of_control_algorithms_for_robotic_ankle_systems_in_lower-limb_orthoses_prostheses_and_exoskeletons [5] 杨巍, 张秀峰, 杨灿军, 吴海杰.基于人机5杆模型的下肢外骨骼系统设计.浙江大学学报(工学版), 2014, 48(3):430-435, 444 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201403009.htmYang Wei, Zhang Xiu-Feng, Yang Can-Jun, Wu Hai-Jie. Design of a lower extremity exoskeleton based on 5-bar human machine model. Journal of Zhejiang University (Engineering Science), 2014, 48(3):430-435, 444 http://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC201403009.htm [6] 孙建, 余永, 葛运建, 陈峰, 沈煌焕.基于接触力信息的可穿戴型下肢助力机器人传感系统研究.中国科学技术大学学报, 2008, 38(12):1432-1438 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD200812013.htmSun Jian, Yu Yong, Ge Yun-Jian, Chen Feng, Shen Huang-Huan. Research on multi-sensors perceptual system of wearable power assist leg based on interaction force signal and joint angle signal. Journal of University of Science and Technology of China, 2008, 38(12):1432-1438 http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD200812013.htm [7] 向馗, 易畅, 尹凯阳, 葛运建.一种踝关节行走助力外骨骼的设计.华中科技大学学报(自然科学版), 2015, 43(S1):367-371 http://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2015S1087.htmXiang Kui, Yi Chang, Yin Kai-Yang, Ge Yun-Jian. An ankle exoskeleton for walking assist. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2015, 43(S1):367-371 http://www.cnki.com.cn/Article/CJFDTOTAL-HZLG2015S1087.htm [8] 韩亚丽, 祁兵, 于建铭, 宋爱国, 朱松青.面向助力膝关节外骨骼的弹性驱动器研制及实验研究.机器人, 2014, 36(6):668-675 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201406005.htmHan Ya-Li, Qi Bing, Yu Jian-Ming, Song Ai-Guo, Zhu Song-Qing. Development and experimental study of elastic actuator for a power-assisted knee exoskeleton. Robot, 2014, 36(6):668-675 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201406005.htm [9] 张立勋, 李长胜, 刘富强.多模式下肢康复训练机器人的设计与实验分析.中国康复医学杂志, 2011, 26(5):464-466 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201105021.htmZhang Li-Xun, Li Chang-Sheng, Liu Fu-Qiang. Design and experimental analysis of the multi-mode lower limb rehabilitation robot. Chinese Journal of Rehabilitation Medicine, 2011, 26(5):464-466 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201105021.htm [10] Kazerooni H, Steger R, Huang L H. Hybrid Control of the Berkeley lower extremity exoskeleton (BLEEX). International Journal of Robotics Research, 2006, 25(5-6):561-573 doi: 10.1177/0278364906065505 [11] Kawamoto H, Lee S, Kanbe S, Sankai Y. Power assist method for HAL-3 using EMG-based feedback controller. In:Proceedings of the 2003 IEEE International Conference on Systems, Man and Cybernetics. Washington D.C., USA:IEEE, 2003:1648-1653 [12] Aguirre-Ollinger G, Colgate J E, Peshkin M A, Goswami A. Design of an active one-degree-of-freedom lower-limb exoskeleton with inertia compensation. The International Journal of Robotics Research, 2011, 30(4):486-499 http://www.academia.edu/9932703/Design_of_an_active_one-degree-of-freedom_lower-limb_exoskeleton_with_inertia_compensation [13] 刘棣斐, 唐志勇, 裴忠才.基于导纳原理的下肢外骨骼摆动控制.北京航空航天大学学报, 2015, 41(6):1019-1025 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201506010.htmLiu Di-Fei, Tang Zhi-Yong, Pei Zhong-Cai. Swing motion control of lower extremity exoskeleton based on admittance method. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(6):1019-1025 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201506010.htm [14] Browning R C, Modica J R, Kram R, Goswami A. The effects of adding mass to the legs on the energetics and biomechanics of walking. Medicine and Science in Sports and Exercise, 2007, 39(3):515-525 doi: 10.1249/mss.0b013e31802b3562 [15] Royer T D, Martin P E. Manipulations of leg mass and moment of inertia:effects on energy cost of walking. Medicine and Science in Sports and Exercise, 2005, 37(4):649-656 doi: 10.1249/01.MSS.0000159007.56083.96 [16] Doke J, Donelan J M, Kuo A D. Mechanics and energetics of swinging the human leg. Journal of Experimental Biology, 2005, 208(3):439-445 doi: 10.1242/jeb.01408 [17] Han Y L, Wang X S. The biomechanical study of lower limb during human walking. Science China Technological Sciences, 2011, 54(4):983-991 doi: 10.1007/s11431-011-4318-z -

 下载:
下载:
计量
- 文章访问数: 2752
- HTML全文浏览量: 370
- PDF下载量: 909
- 被引次数: 0
