

A Novel Sinusoidal Frequency Measurement Method Based on Modulation of Sequence with Zero Initial Phase
-
摘要: 高准确度的正弦信号频率测量技术有广泛的应用,如应用于系统信号的同步处理,系统的谐波和系统的阻抗测量.但在低频正弦信号频率测量方面,现有的频率测量方法普遍存在准确度不高和抗谐波噪声干扰性不强等问题.文中提出了一种主要由序列零初相位调制等方法构成的新型正弦信号频率测量方法,分析了序列零初相位调制的原理.新方法避开了输入序列任意初相位的影响,同时调制序列携带了数值较大的信号序列全相位差信息,可实现准确度较高的低频正弦信号频率测量,此外新方法还具有较强的抗谐波噪声干扰特性,将新方法具体应用于电力系统正弦频率的测量,显示出明显的优越性.通过数学计算、仿真实验及物理实验结果验证了新型正弦信号频率测量方法的正确性和可靠性.Abstract: High accuracy sinusoidal frequency measurement technologies have been utilized in a wide range, such as the system signal synchronization, the interconnection of harmonics and the system impedance measurement. The existing sinusoidal frequency measurement technologies have the limitation of low accuracy and weak anti-interference of harmonic for low-frequency sinusoidal signals. In this paper, a novel sinusoidal frequency measurement method based on modulation of sequence zero initial phase is proposed. The principle of this method is analyzed. The influence of arbitrary initial phase can be avoided by this method. Besides, the modulation sequence carries a large number of phase difference information. Thus, it can be used for low-frequency sinusoidal signals with high accuracy and strong anti-interference of harmonic characteristic. Mathematical calculation, simulation test and the physical experiment results also verify the correctness and effectiveness of the proposed method. Compared to existing technology, this new method has obvious advantage for electric power systems.
-
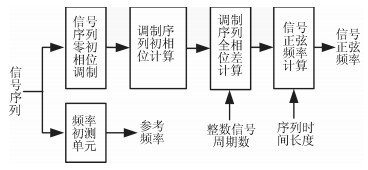
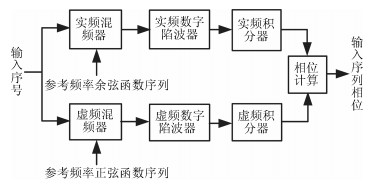
图 1 正弦频率计算原理示意图
Fig. 1 Schematic diagram of the principle of sinusoidal frequency calculation

图 2 序列零初相位调制原理示意图
Fig. 2 A schematic diagram of the initial phase modulation of the sequence
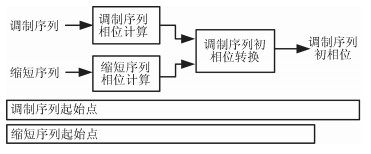
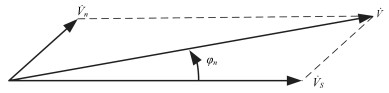
图 3 调制序列初相位计算原理示意图
Fig. 3 The schematic diagram of the initial phase of the modulation sequence
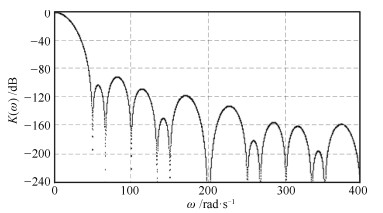
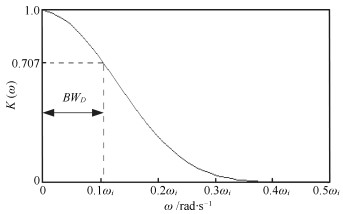
图 5 数字陷波频域特性示意图
Fig. 5 Schematic diagram of frequency characteristics of digital filter
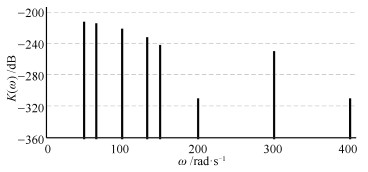
图 6 混频频率抑制特性示意图
Fig. 6 Diagram of mixing frequency component suppression characteristic
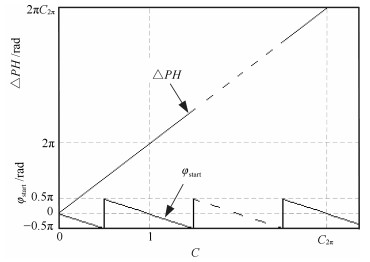
图 7 序列全相位差与初相位关系示意图
Fig. 7 A schematic diagram of the whole phase difference and the initial phase of the sequence
图 10 基波频率计算相对误差实验结果示意图 1
Fig. 10 The schematic diagram 1 of relative error of fundamental frequency calculation
图 11 基波频率计算相对误差实验结果示意图 2
Fig. 11 The schematic diagram 2 of relative error of fundamental frequency calculation
图 12 实际信号频率测量物理实验结果示意图
Fig. 12 The diagram of relative error of the actual signal frequency measurement results
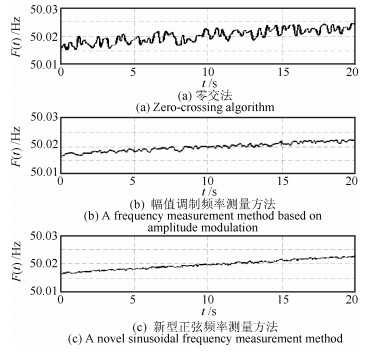
图 13 实际电力信号频率测量实验结果示意图
Fig. 13 Schematic diagram of the actual power signal frequency measurement results
表 1 混频频率计算表
Table 1 Calculation of mixing frequency
频率 频率 $ \frac{1}{3}$分次 $\frac{1}{2}$分次 2次 3次 相减混频频率 0$\omega_{i}$ $\frac{2\omega_{i}}{3}$ $\frac{1\omega_{i}}{2}$ 1$\omega_{i}$ 2$\omega_{i}$ 相加混频频率 2$\omega_{i}$ $ \frac{4\omega_{i}}{3}$ $\frac{3\omega_{i}}{2}$ 3$\omega_{i}$ 4$\omega_{i}$  下载: 导出CSV
下载: 导出CSV
表 2 新型正弦频率测量方法实验结果表
Table 2 Calculation of mixing frequency
新型正弦频率测量方法 计算值 相对误差 信号基波频率50 Hz 50.0000000061 1.22 × 10-10
下载: 导出CSV
-
[1] 李军, 万文军, 刘志刚, 陈世和, 张曦.一种基于时域响应的控制系统频率特性分析方法.中国电机工程学报, 2012, 32(29):116-122 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201229018.htmLi Jun, Wan Wen-Jun, Liu Zhi-Gang, Chen Shi-He, Zhang Xi. A method of frequency domain analysis for control systems based on process response in time domain. Proceedings of the CSEE, 2012, 32(29):116-122 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201229018.htm [2] 李军, 万文军, 刘志刚.一种阶跃函数在矩形时间窗口频域特性的分析方法.电力自动化设备, 2013, 33(11):111-116 http://www.cnki.com.cn/Article/CJFDTOTAL-DLZS201311021.htmLi Jun, Wan Wen-Jun, Liu Zhi-Gang. Method for analyzing frequency-domain characteristics of step function in rectangular time window. Electric Power Automation Equipment, 2013, 33(11):111-116 http://www.cnki.com.cn/Article/CJFDTOTAL-DLZS201311021.htm [3] 黄博妍, 常琳, 马亚平, 孙金玮, 魏国.一种应对非平稳频率失调的窄带主动噪声控制系统.自动化学报, 2015, 41(11):186-193 http://www.aas.net.cn/CN/abstract/abstract18597.shtmlHuang Bo-Yan, Chang Lin, Ma Ya-Ping, Sun Jin-Wei, Wei Guo. A new narrowband ANC system against nonstationary frequency mismatch. Acta Automatica Sinica, 2015, 41(11):186-193 http://www.aas.net.cn/CN/abstract/abstract18597.shtml [4] 黄羽中鹏, 刘全胜, 徐保国.基于模糊函数的LM型压缩接收机频率检测性能分析.电子学报, 2015, 43(3):505-511 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201503014.htmHuang Chong-Peng, Liu Quan-Sheng, Xu Bao-Guo. Frequency detection by LM compressive receiver using ambiguity function. Acta Electronica Sinica, 2015, 43(3):505-511 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201503014.htm [5] 包伯成, 邹相, 胡文, 武花干.有源忆阻器伏安关系与有源忆阻电路频率特性研究.电子学报, 2013, 41(3):593-597 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201303029.htmBao Bo-Cheng, Zou Xiang, Hu Wen, Wu Hua-Gan. Voltage-current relationship of active memristor and frequency characteristic of active memristive circuit. Acta Electronica Sinica, 2013, 41(3):593-597 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201303029.htm [6] 米曾真.小波域中CSF频率与方向加权的图像质量评价方法.电子学报, 2014, 42(7):1273-1276 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201407005.htmMi Zeng-Zhen. Image quality evaluation method based on frequency and direction weighted to CSF in wavelet domain. Acta Electronica Sinica, 2014, 42(7):1273-1276 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201407005.htm [7] 祁艳杰, 刘章发.基于Parallel-CORDIC的高精度高速度直接数字频率合成器的FPGA实现.电子学报, 2014, 42(7):1392-1397 http://www.cnki.com.cn/article/cjfdtotal-dzxu201407023.htmQi Yan-Jie, Liu Zhang-Fa. FPGA implementation of high speed and high precision direct digital frequency synthesizer based on parallel-CORDIC. Acta Electronica Sinica, 2014, 42(7):1392-1397 http://www.cnki.com.cn/article/cjfdtotal-dzxu201407023.htm [8] 储昭碧, 丁明, 杜少武, 冯小英.归一化频率自适应梳状滤波器的稳定性分析.自动化学报, 2010, 36(11):1581-1593 doi: 10.3724/SP.J.1004.2010.01581Chu Zhao-Bi, Ding Ming, Du Shao-Wu, Feng Xiao-Ying. Stability analysis of normalized frequency adaptive comb filter. Acta Automatica Sinica, 2010, 36(11):1581-1593 doi: 10.3724/SP.J.1004.2010.01581 [9] 储昭碧, 张崇巍, 冯小英.基于基波频率估计的多谐波分析.自动化学报, 2009, 35(5):532-539 http://www.aas.net.cn/CN/abstract/abstract15788.shtmlChu Zhao-Bi, Zhang Chong-Wei, Feng Xiao-Ying. Multi-harmonics analysis based on fundamental frequency estimate. Acta Automatica Sinica, 2009, 35(5):532-539 http://www.aas.net.cn/CN/abstract/abstract15788.shtml [10] 肖遥, 孟·让·柯洛德.电力系统频率测量误差成因分析.电网技术, 2002, 26(1):39-42 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200201009.htmXiao Yao, Maun J C. Analysis on error in power system frequency measurement. Power System Technology, 2002, 26(1):39-42 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200201009.htm [11] 李阳, 田彦涛, 陈万忠.基于FFT盲辨识的肌电信号建模及模式识别.自动化学报, 2012, 38(1):128-134 doi: 10.3724/SP.J.1004.2012.00128Li Yang, Tian Yan-Tao, Chen Wan-Zhong. Modeling and classifying of sEMG based on FFT blind identification. Acta Automatica Sinica, 2012, 38(1):128-134 doi: 10.3724/SP.J.1004.2012.00128 [12] 肖鲲, 王莉娜, Shahzad M K.基于三线DFT的航空电源频率实时检测算法.电工技术学报, 2012, 27(10):190-195 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201210028.htmXiao Kun, Wang Li-Na, Shahzad M K. Real-time frequency estimation of aircraft power source based on 3-line DFT. Transactions of China Electrotechnical Society, 2012, 27(10):190-195 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201210028.htm [13] 储昭碧, 张崇巍, 冯小英.基于自适应陷波滤波器的频率和幅值估计.自动化学报, 2010, 36(1):60-66 doi: 10.3724/SP.J.1004.2010.00060Chu Zhao-Bi, Zhang Chong-Wei, Feng Xiao-Ying. Adaptive notch filter-based frequency and amplitude estimation. Acta Automatica Sinica, 2010, 36(1):60-66 doi: 10.3724/SP.J.1004.2010.00060 [14] 李明, 涂亚庆, 沈廷鳌, 杨辉跃.自适应陷波滤波器频率估计新方法及性能分析.电子学报, 2014, 42(1):49-57 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201401008.htmLi Ming, Tu Ya-Qing, Shen Ting-Ao, Yang Hui-Yue. A new frequency estimation method based on adaptive notch filter and its performance analysis. Acta Electronica Sinica, 2014, 42(1):49-57 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201401008.htm [15] 王兴国, 黄少锋.基于复解析带通滤波器的固有频率自适应提取原理和方法.电工技术学报, 2009, 24(12):179-184 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS200912029.htmWang Xing-Guo, Huang Shao-Feng. Natural frequency adaptive extracting principle and method based on multiple analysis band-pass filter. Transactions of China Electrotechnical Society, 2009, 24(12):179-184 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS200912029.htm [16] 刘涤尘, 夏利民, 商志会.基于人工神经网络的电网频率测量方法.电网技术, 2000, 24(8):40-43 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200008009.htmLiu Di-Chen, Xia Li-Min, Shang Zhi-Hui. An artificial neural network approach for measuring power system frequency. Power System Technology, 2000, 24(8):40-43 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200008009.htm [17] 朱锋峰, 任震, 黄雯莹.基于小波变换修正幅值的电力系统频率偏移诊断方法.电网技术, 2004, 28(11):34-37 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200411008.htmZhu Feng-Feng, Ren Zhen, Huang Wen-Ying. A method to diagnose frequency shift of power systems based on modified amplitude of wavelet transform. Power System Technology, 2004, 28(11):34-37 http://www.cnki.com.cn/Article/CJFDTOTAL-DWJS200411008.htm [18] 李军, 王越超.一种基于幅值调制的新型电力系统正弦频率测量方法.电工技术学报, 2015, 30(7):144-150 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201507018.htmLi Jun, Wang Yue-Chao. A novel power system sinusoidal frequency measurement method based on amplitude modulation. Transactions of China Electrotechnical Society, 2015, 30(7):144-150 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201507018.htm [19] 雷银照.我国供用电频率50Hz的起源.电工技术学报, 2010, 25(3):20-26 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201003006.htmLei Yin-Zhao. The origins of 50Hz power frequency in mainland China. Transactions of China Electrotechnical Society, 2010, 25(3):20-26 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201003006.htm -

 下载:
下载:

计量
- 文章访问数: 2607
- HTML全文浏览量: 275
- PDF下载量: 755
- 被引次数: 0
