

-
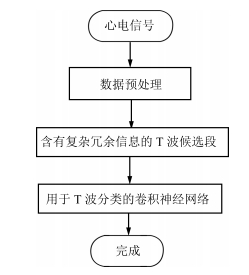
摘要: T波形态分类有助于诊断心肌缺血、急性心包炎和心脏猝死等疾病,是心电图远程监控中一个重要的研究课题.传统的T波分类算法依赖于T波检测,在准确定位T波的关键点之后再提取T波特征,完成分类.但是由于T波位置可能发生一定程度偏移,T波的形态多变且受到多种噪声的干扰,T波检测是一个难题.为了解决上述问题,本文提出基于卷积神经网络的T波分类算法:首先根据QRS波群位置及医学统计规律确定一个T波候选段,然后采用卷积神经网络直接完成T波分类.由于卷积神经网络有稀疏连接、权值共享的特性,能够通过训练自动获取T波特征,并且其特征对微小平移具备不变性且对噪声不敏感,从而能够有效解决T波形态分类问题.最后在MIT-BIH QT心电数据库上对本文方法进行测试,实验结果表明,本文方法可以在T波起始点未确定的情况下,能够识别单峰直立、单峰倒置、低平、负正双向、正负双向五类T 波形态,正确率达到了99.1%.Abstract: T wave shape classification which is helpful for the diagnosing of many cardiovascular diseases such as myocardial ischemia, acute pericarditis and sudden cardiac death, is an important research topic in electrocardiogram remote monitoring. The method of traditional T wave shape classification is based on the accurate detection of the T wave. It is implemented after the T wave delineation and feature extraction. However, T wave detection is difficult because of the position shift, morphologic variation and multi-noise. To resolve this problem, this paper proposes to classify T wave shape based on convolutional neural network. In the new method, firstly, a candidate data segment which contains the T wave is intercepted based on the location of the QRS wave and the medical statistical knowledge. Then the T wave is classified directly based on the convolutional neural network. Due to the advantages of sparse connection and weight share, the convolutional neural network can extract T wave feature by data training and it is robust to the poison shift and noise. So the convolutional neural network can resolve the T wave shape classification problem efficiently. The new method is tested on the MIT-BIH QT database; the experimental results show that the new method performs well in T wave shape classification without T wave delineation and the classification accuracy is 99.1%.
-
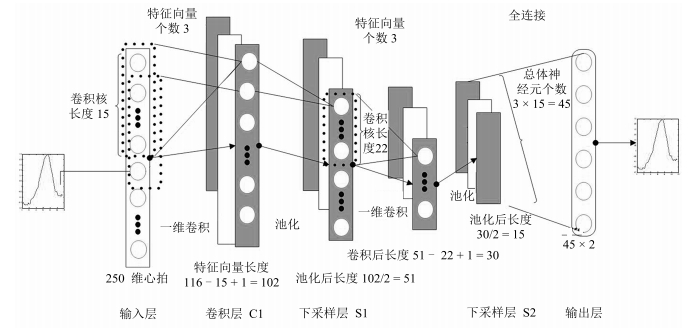
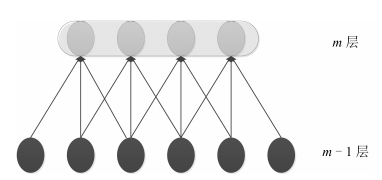
图 8 T波分类的卷积神经网络结构
Fig. 8 Architecture of the convolution neural network for T wave classification
表 1 分类结果
Table 1 Classification results
测试分类 正常 正负 负正 倒置 低平 正常 993 2 1 0 4 正负 2 991 0 1 6 负正 3 0 792 2 3 倒置 0 1 3 794 2 低平 3 1 1 1 394  下载: 导出CSV
下载: 导出CSV
表 2 不同训练次数下的识别率(%)
Table 2 Recognition rates under different training times (%)
训练次数 1 5 10 20 训练集识别率 87.4 95.3 99.4 99.4 测试集识别率 85.7 91.4 99.1 99.1
下载: 导出CSV
表 3 卷积核个数选择
Table 3 Choice of the number of the convolution kernel
卷积核个数 2 3 5 8 11 训练样本的时间(s) 22.95 39.8 61.8 121.3 144.7 测试集识别率(%) 95.7 99.1 99.1 99.1 99.1
下载: 导出CSV
表 4 与经典BP神经网络对比(%)
Table 4 Comparison with the classical BP neural network (%)
CNN BP 99.1 96.7
下载: 导出CSV
表 5 与传统T波分类方法的对比(%)
Table 5 Comparison with traditional T wave classification methods (%)
T波分类方法 准确率 T波候选段+卷积神经网络多形态分类识别 99.1 膜极值定位T波+SVM单形态分类识别 98.2 QT特征提取+决策树、逻辑回归方法 92.54
下载: 导出CSV
-
[1] 夏云龙, 杨延宗. T波形成的心电生理机制及其争议. 心血管病学进展, 2010, 31(4): 497-499 http://www.cnki.com.cn/Article/CJFDTOTAL-XXGB201004003.htmXia Yun-Long, Yang Yan-Zong. Controversial in mechanisms of genesis of T wave. Advances in Cardiovascular Diseases, 2010, 31(4): 497-499 http://www.cnki.com.cn/Article/CJFDTOTAL-XXGB201004003.htm [2] 钱敏. 心电图T波改变的诊断与临床意义. 中国疗养医学, 2014, 23(8): 684-686 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGLX201408011.htmQian Min. The diagnosis and clinical significance of T wave changes in electrocardiogram. Chinese Journal of Convalescent Medicine, 2014, 23(8): 684-686 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGLX201408011.htm [3] Kania M, Fereniec M, Maniewski R. Evaluation of T-wave morphology dispersion in high-resolution ECG for risk stratification of sudden cardiac death. In: Proceedings of the 2012 Computing in Cardiology. Krakow: IEEE, 2012. 785-788 [4] Vila J, Gang Y, Presedo J, Fernandez-Delgado M, Barro S, Malik M. A mathematical model for the T-wave pattern classification. In: Proceedings of the 1998 Computers in Cardiology. Cleveland, OH: IEEE, 1998. 421-424 [5] 王云鹤, 钱梦瑶, 刘定宇, 饶妮妮. 心电信号多形态T波检测方法研究. 航天医学与医学工程, 2013, 26(4): 295-298 http://www.cnki.com.cn/Article/CJFDTOTAL-HYXB201304009.htmWang Yun-He, Qian Meng-Yao, Liu Ding-Yu, Rao Ni-Ni. Study on detection method of T waves with different morphologies in electrocardiogram. Space Medicine and Medical Engineering, 2013, 26(4): 295-298 http://www.cnki.com.cn/Article/CJFDTOTAL-HYXB201304009.htm [6] Hadjem M, Nait-Abdesselam F. An ECG T-wave anomalies detection using a lightweight classification model for wireless body sensors. In: Proceedings of the 2015 IEEE International Conference on Communication Workshop. London, UK: IEEE, 2015. 278-283 [7] Liu Y J, Tang L, Tong S C, Chen C L P. Adaptive NN controller design for a class of nonlinear MIMO discrete-time systems. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(5): 1007-1018 doi: 10.1109/TNNLS.2014.2330336 [8] Liu Y J, Gao Y, Tong S C, Chen C L P. A unified approach to adaptive neural control for nonlinear discrete-time systems with nonlinear dead-zone input. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(1): 139-150 doi: 10.1109/TNNLS.2015.2471262 [9] Zhang H G, Wang Z S, Liu D R. A comprehensive review of stability analysis of continuous-time recurrent neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(7): 1229-1262 doi: 10.1109/TNNLS.2014.2317880 [10] McDonnell M D, Vladusich T. Enhanced image classification with a fast-learning shallow convolutional neural network. In: Proceedings of the 2015 International Joint Conference on Neural Networks. Killarney, Ireland: IEEE, 2015. 1-7 [11] Kalchbrenner N, Grefenstette E, Blunsom P. A convolutional neural network for modelling sentences. In: Proceedings of the 52nd Annual Meeting of the Association for Computational Linguistics. Baltimore, USA: Association for Computational Linguistics, 2014. 655-665 [12] Dosovitskiy A, Springenberg J T, Brox T. Learning to generate chairs with convolutional neural networks. In: Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston, US: IEEE, 2015. 1538-1546 [13] Liu X L, Yang J L, Zhu X Y, Zhou S P, Wang H R, Zhang H. A novel R-peak detection method combining energy and wavelet transform in electrocardiogram signal. Biomedical Engineering: Applications, Basis and Communications, 2014, 26(1): 1-9 http://cn.bing.com/academic/profile?id=2046643603&encoded=0&v=paper_preview&mkt=zh-cn [14] 张世杰. 心电信号中T波交替的检测方法研究 [硕士学位论文], 武汉理工大学, 中国, 2009.Zhang Shi-Jie. Detection Method Research for T Wave Alternans in Electrocardiogram [Master dissertation], Wuhan University of Technology, China, 2009. -

 下载:
下载:



计量
- 文章访问数: 2547
- HTML全文浏览量: 680
- PDF下载量: 1637
- 被引次数: 0
