

-
摘要: 针对压缩感知(Compressive sensing,CS)中未知稀疏度信号的重建问题,本文提出一种变步长稀疏度自适应子空间追踪算法.首先,采用一种匹配测试的方法确定固定步长,然后以该固定步长与变步长方式相结合,通过不同支撑集原子个数下的重建残差变化确定信号稀疏度,算法采用子空间追踪方法确定相应支撑集原子,并完成原始信号准确重建.实验结果表明,与同类算法相比,该算法可以更准确重建原始信号,且信号稀疏度值较高时,运算量低于同类算法.Abstract: A novel variable step size sparsity adaptive subspace pursuit algorithm is proposed to rebuild the sparse signals with unknown sparsity in compressive sensing. Firstly, the initial fixed step size is obtained by matching test, which is combined with the variable step size method. Then, the sparsity is accurately estimated according to the change of signal rebuilding residual error under vary support set. Subspace pursuit algorithm is used to determine the support set and exactly rebuild the sparse signal. Simulation results show that the proposed algorithm is competitive in recovering accuracy and running speed, compared to other similar algorithms, when sparsity is large.
-
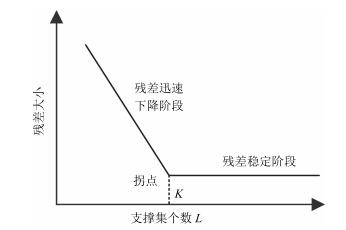
图 1 支撑集原子个数与残差对应关系示意图
Fig. 1 The relationship of residual error and the number of support set atom
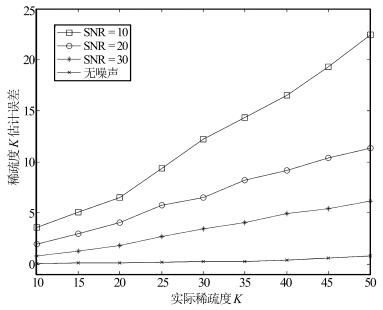
图 2 不同信噪比下稀疏度K估计误差
Fig. 2 Estimating error of signal sparsity under different noise level

图 3 不同算法信号准确重建率
Fig. 3 Exact recovery ratio of recovery algorithms by different reconstruction algorithms
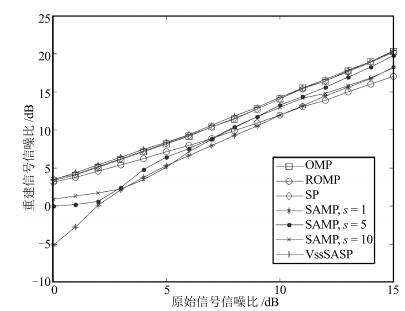
图 4 噪声环境下的重建精度(M=80, N=256, K=20)
Fig. 4 Reconstruction accuracy in noise environment (M=80, N=256, K=20)
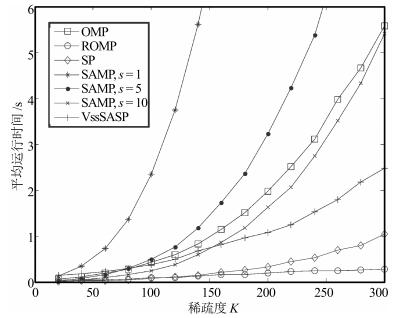
图 5 算法运行时间对比(M=1 024, N=2 048)
Fig. 5 Running time by different reconstruction algorithms (M=1 024, N=2 048)
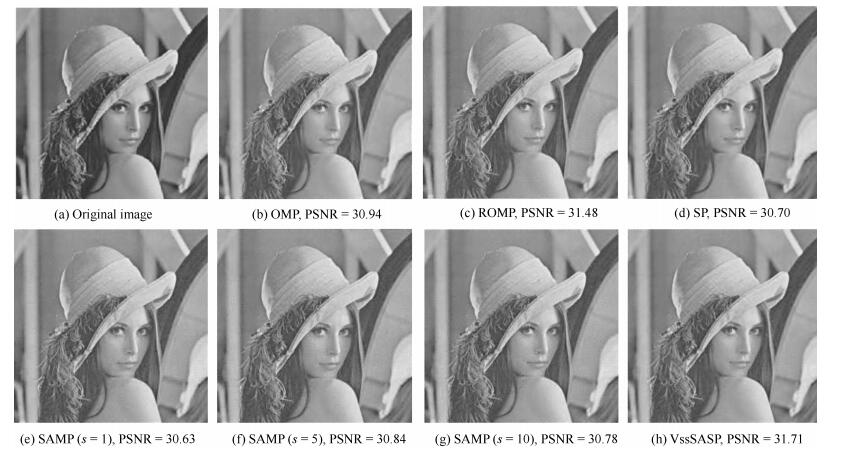
图 6 样率0.5时, Lena原图像及各算法重建图像
Fig. 6 Original image and reconstructed image of different algorithms for Lena when sampling rate is 0.5
表 1 各算法的重建质量及运行时间对比
Table 1 Comparison of the qualities of images reconstructed and running time by different algorithms
重建算法 M=0.3 × N M=0.4 × N M=0.5 × N PSNR(dB) 运算时间 PSNR(dB) 运算时间 PSNR(dB) 运算时间 OMP 23.07 0.69 27.48 1.06 30.96 1.24 ROMP 24.72 0.32 27.89 0.68 31.52 1.05 SP 23.15 0.76 26.51 0.96 30.84 1.32 SAMP1 24.80 11.57 27.79 18.25 30.96 26.96 SAMP5 24.14 2.71 27.49 4.55 30.85 7.46 SAMP10 23.65 1.55 27.42 2.84 30.72 3.91 VssSASP 25.26 3.21 28.13 4.92 31.63 7.63  下载: 导出CSV
下载: 导出CSV
-
[1] Donoho D L. Compressed sensing. IEEE Transactions on Information Theory, 2006, 52(4):1289-1306 doi: 10.1109/TIT.2006.871582 [2] Candés E J. Compressive sampling. In:Proceedings of the 2006 International Congress of Mathematicians. Madrid, Spain:EMS Publishing House, 2006. 1433-1452 http://www.researchgate.net/publication/41537648_Compressive_Sampling [3] Candés E J, Tao T. Near-optimal signal recovery from random projections:universal encoding strategies. IEEE Transactions on Information Theory, 2006, 52(12):5406-5425 doi: 10.1109/TIT.2006.885507 [4] 荆楠, 毕卫红, 胡正平, 王林.动态压缩感知综述.自动化学报, 2015, 41(1):22-37 http://www.aas.net.cn/CN/abstract/abstract18580.shtmlJing Nan, Bi Wei-Hong, Hu Zheng-Ping, Wang Lin. A survey on dynamic compressed sensing. Acta Automatica Sinica, 2015, 41(1):22-37 http://www.aas.net.cn/CN/abstract/abstract18580.shtml [5] Mallat S G, Zhang Z F. Matching pursuits with time-frequency dictionaries. IEEE Transactions on Signal Processing, 1993, 41(12):3397-3415 doi: 10.1109/78.258082 [6] Tropp J A, Gilbert A C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Transactions on Information Theory, 2007, 53(12):4655-4666 doi: 10.1109/TIT.2007.909108 [7] Needell D, Vershynin R. Uniform uncertainty principle and signal recovery via regularized orthogonal matching pursuit. Foundations of Computational Mathematics, 2009, 9(3):317-334 doi: 10.1007/s10208-008-9031-3 [8] Donoho D L, Tsaig Y, Drori I, Starck J L. Sparse solution of underdetermined systems of linear equations by stagewise orthogonal matching pursuit. IEEE Transactions on Information Theory, 2012, 58(2):1094-1121 doi: 10.1109/TIT.2011.2173241 [9] Needell D, Tropp J A. CoSaMP:iterative signal recovery from incomplete and inaccurate samples. Communications of the ACM, 2010, 53(12):93-100 [10] Dai W, Milenkovic O. Subspace pursuit for compressive sensing signal reconstruction. IEEE Transactions on Information Theory, 2009, 55(5):2230-2249 doi: 10.1109/TIT.2009.2016006 [11] Do T T, Gan L, Nguyen N, Tran T D. Sparsity adaptive matching pursuit algorithm for practical compressed sensing. In:Proceedings of the 42nd Asilomar Conference on Signals, Systems, and Computers. Pacific Grove, California:IEEE Press, 2008. 581-587 [12] 沈燕飞, 李锦涛, 朱珍民, 张勇东, 代锋.基于非局部相似模型的压缩感知图像恢复算法.自动化学报, 2015, 41(2):261-272 http://www.aas.net.cn/CN/abstract/abstract18605.shtmlShen Yan-Fei, Li Jin-Tao, Zhu Zhen-Min, Zhang Yong-Dong, Dai Feng. Image reconstruction algorithm of compressed sensing based on nonlocal similarity model. Acta Automatica Sinica, 2015, 41(2):261-272 http://www.aas.net.cn/CN/abstract/abstract18605.shtml [13] 伍飞云, 周跃海, 童峰.基于似零范数和混合优化的压缩感知信号快速重构算法.自动化学报, 2014, 40(10):2145-2150 http://www.aas.net.cn/CN/abstract/abstract18489.shtmlWu Fei-Yun, Zhou Yue-Hai, Tong Feng. A fast sparse signal recovery algorithm based on approximate l0 norm and hybrid optimization. Acta Automatica Sinica, 2014, 40(10):2145-2150 http://www.aas.net.cn/CN/abstract/abstract18489.shtml [14] 徐泽芳, 刘顺兰.一种自适应正则化子空间追踪算法.计算机工程与应用, 2015, 51(3):208-211 http://youxian.cnki.com.cn/yxdetail.aspx?filename=JSGG20140123002&dbname=CAPJ2014Xu Ze-Fang, Liu Shun-Lan. Adaptive regularized subspace pursuit algorithm. Computer Engineering and Applications, 2015, 51(3):208-211 http://youxian.cnki.com.cn/yxdetail.aspx?filename=JSGG20140123002&dbname=CAPJ2014 [15] 张成, 沈川, 程鸿, 章权兵, 陈岚, 韦穗.彩色全息压缩重构.自动化学报, 2015, 41(2):419-428 http://www.aas.net.cn/CN/abstract/abstract18620.shtmlZhang Cheng, Shen Chuan, Cheng Hong, Zhang Quan-Bing, Chen Lan, Wei Sui. Compressed reconstruction of color holography. Acta Automatica Sinica, 2015, 41(2):419-428 http://www.aas.net.cn/CN/abstract/abstract18620.shtml [16] 杨成, 冯巍, 冯辉, 杨涛, 胡波.一种压缩采样中的稀疏度自适应子空间追踪算法.电子学报, 2010, 38(8):1914-1917 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201008031.htmYang Cheng, Feng Wei, Feng Hui, Yang Tao, Hu Bo. A sparsity adaptive subspace pursuit algorithm for compressive sampling. Acta Electronica Sinica, 2010, 38(8):1914-1917 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201008031.htm 期刊类型引用(1)
1. 尚婷,钱富才,刘磊,胡绍林. 一类混合不确定系统的对偶自适应控制. 应用科学学报. 2018(06): 1022-1030 .  百度学术
百度学术其他类型引用(4)
-

计量
- 文章访问数: 2265
- HTML全文浏览量: 553
- PDF下载量: 832
- 被引次数: 5
