

Robust Diagnosis of Intermittent Faults for Linear Stochastic Systems Subject to Time-varying Perturbations
-
摘要: 间歇故障(Intermittent faults, IFs)具有随机性,其检测要求在本次间歇故障消失之前检测出间歇故障的发生,在下一次间歇故障发生之前检测出间歇故障的消失.本文针对一类存在未知时变参数摄动的离散线性随机动态系统,研究了其鲁棒间歇故障检测与分离问题.基于降维未知输入观测器,通过引入滑动时间窗口,本文设计了一组与未知时变摄动解耦的结构化截断残差,并提出其存在的一个充分条件.与传统残差相比,截断残差信号更为显著地反映了间歇故障的发生和消失.为满足间歇故障的检测要求,本文提出两个假设检验分别用于检测间歇故障的发生时刻和消失时刻,并给出了一个详细算法.最后,在沿参考轨道运行的卫星模型上对所述方法进行了仿真实验,结果表明该方法能够有效检测出间歇故障的所有发生时刻和消失时刻,并准确实现故障分离.Abstract: Since intermittent faults (IFs) have an intermittency property, the detection of IFs requires: the current appearing time of an IF must be detected before its disappearing time; the current disappearing time of an IF must be detected before the subsequent appearing time. In this paper, the robust detection problem of IFs for a class of linear discrete-time stochastic systems subject to unknown time-varying perturbations is investigated. Based on reduced-order unknown input observers (UIOs), a novel set of structured truncated residuals is designed to detect and isolate IFs by introducing sliding-time windows, and a sufficient condition is proposed for the existence of the residual generators. Compared to traditional residuals, the novel truncated residuals, which get decoupled from time-varying perturbations, are more sensitive to the IFs. Based on the analysis of these novel residuals, two hypothesis tests are proposed to detect all the appearing times and the disappearing times of an IF. In addition, a detailed algorithm is provided to perform the given scheme. Finally, simulation results on a model of a satellite moving in a circular reference orbit are presented to illustrate the effectiveness of the proposed method.
-
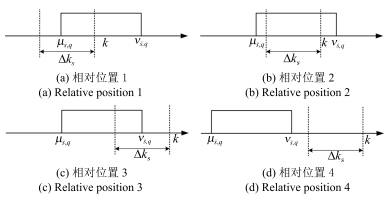
图 1 间歇故障与滑动时间窗口的相对位置关系
Fig. 1 Relative positions between the intermittent fault and the sliding-time windo
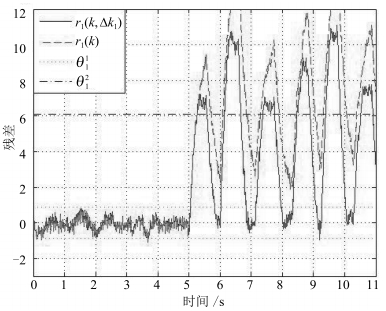
图 4 初始残差信号 $r_1(k)$ 和新残差信号 $r_1(k, \Delta k_1)$
Fig. 4 Comparing $r_1(k, \Delta k_1)$ with $r_1(k)$
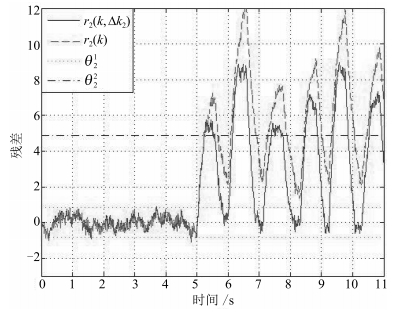
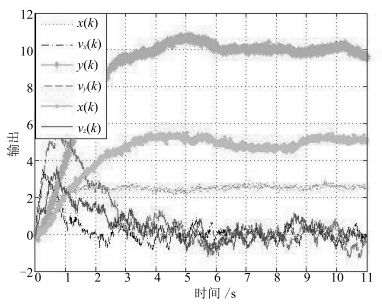
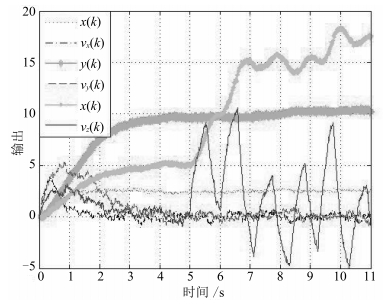
图 5 初始残差信号 $r_2(k)$ 和新残差信号 $r_2(k, \Delta k_2) $
Fig. 5 Comparing $r_2(k, \Delta k_2)$ with $r_2(k)$
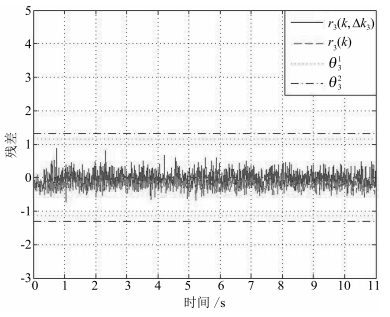
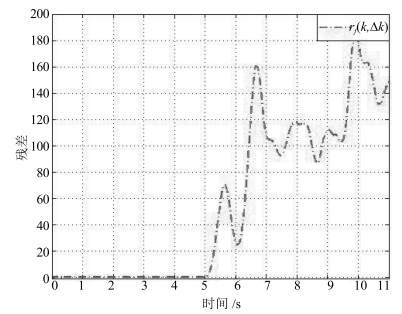
图 6 初始残差信号 $r_3(k)$ 和新残差信号 $r_3(k, \Delta k_3) $
Fig. 6 Comparing $r_3(k, \Delta k_3)$ with $r_3(k)$
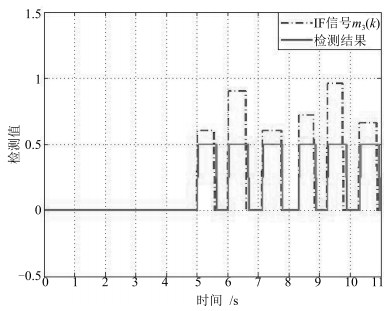
表 1 间歇故障发生(消失)时刻及其实际检测值
Table 1 The detection result of $m_3(k)$ by using the proposed method
q $\mu_{3, q}$ $\mu_{3, q}^{\text{dec}}$ $\nu_{3, q}$ $\nu_{3, q}^{\text{dec}}$ 1 5.00 5.03 5.57 5.62 2 6.02 6.03 6.59 6.67 3 7.14 7.15 7.75 7.77 4 8.32 8.34 8.83 8.87 5 9.26 9.28 9.76 9.87  下载: 导出CSV
下载: 导出CSV
-
[1] 周东华, 史建涛, 何潇.动态系统间歇故障诊断技术综述.自动化学报, 2014, 40(2):161-171 http://www.aas.net.cn/CN/abstract/abstract18279.shtmlZhou Dong-Hua, Shi Jian-Tao, He Xiao. Review of intermittent fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2014, 40(2):161-171 http://www.aas.net.cn/CN/abstract/abstract18279.shtml [2] Chen M Y, Xu G B, Yan R Y, Ding S X, Zhou D H. Detecting scalar intermittent faults in linear stochastic dynamic systems. International Journal of Systems Science, 2015, 46(8):1337-1348 http://cn.bing.com/academic/profile?id=2005939068&encoded=0&v=paper_preview&mkt=zh-cn [3] Correcher A, García E, Morant F, Quiles E, Blasco-Gimenez R. Intermittent failure diagnosis in industrial processes. In:Proceedings of the 2003 IEEE International Symposium on Industrial Electronics. Rio de Janeiro, Brazil:IEEE, 2003. 723-728 [4] Rashid L, Pattabiraman K, Gopalakrishnan S. Characterizing the impact of intermittent hardware faults on programs. IEEE Transactions on Reliability, 2015, 64(1):297-310 doi: 10.1109/TR.2014.2363152 [5] Shivakumar P, Kistler M, Keckler S W, Burger D, Alvisi L. Modeling the impact of device and pipeline scaling on the soft error rate of processor elements. Computer Science Department, University of Texas at Austin, 2002. http://cn.bing.com/academic/profile?id=87137010&encoded=0&v=paper_preview&mkt=zh-cn [6] 周东华, 魏慕恒, 司小胜.工业过程异常检测、寿命预测与维修决策的研究进展.自动化学报, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtmlZhou Dong-Hua, Wei Mu-Heng, Si Xiao-Sheng. A survey on anomaly detection, life prediction and maintenance decision for industrial processes. Acta Automatica Sinica, 2013, 39(6):711-722 http://www.aas.net.cn/CN/abstract/abstract18097.shtml [7] Sorensen B A, Kelly G, Sajecki A, Sorensen P W. An analyzer for detecting intermittent faults in electronic devices. In:Proceedings of AUTOTESTCON'94 IEEE Conference on Systems Readiness Technology——"Cost Effective Support into the Next Century". Anaheim, USA:IEEE, 1994. 417-421 [8] Yesilyurt I, Gu F S, Ball A D. Gear tooth stiffness reduction measurement using modal analysis and its use in wear fault severity assessment of spur gears. NDT and E International, 2003, 36(5):357-372 doi: 10.1016/S0963-8695(03)00011-2 [9] Zanardelli W G, Strangas E G, Aviyente S. Identification of intermittent electrical and mechanical faults in permanent-magnet AC drives based on time-frequency analysis. IEEE Transactions on Industry Applications, 2007, 43(4):971-980 doi: 10.1109/TIA.2007.900446 [10] 马洁, 李刚, 陈默.基于非线性故障重构的旋转机械故障预测方法.自动化学报, 2014, 40(9):2045-2049 http://www.aas.net.cn/CN/abstract/abstract18477.shtmlMa Jie, Li Gang, Chen Mo. Nonlinear fault reconstruction based fault prognosis for rotating machinery. Acta Automatica Sinica, 2014, 40(9):2045-2049 http://www.aas.net.cn/CN/abstract/abstract18477.shtml [11] Hamel A, Gaudreau A, Cote M. Intermittent arcing fault on underground low-voltage cables. IEEE Transactions on Power Delivery, 2004, 19(4):1862-1868 doi: 10.1109/TPWRD.2003.822979 [12] Correcher A, García E, Morant F, Quiles E, Rodriguez L. Intermittent failure dynamics characterization. IEEE Transactions on Reliability, 2012, 61(3):649-658 doi: 10.1109/TR.2012.2208300 [13] Kim C J. Electromagnetic radiation behavior of low-voltage arcing fault. IEEE Transactions on Power Delivery, 2009, 24(1):416-423 doi: 10.1109/TPWRD.2008.2002873 [14] 周东华, 陈茂银, 徐正国.可靠性预测与最优维护技术.合肥:中国科学技术大学出版社, 2013.Zhou Dong-Hua, Chen Mao-Yin, Xu Zheng-Guo. The Reliabibility Prediction and Optimal Maintenance Technology. Hefei:Press of University of Science and Technology of China, 2013. [15] 徐贵斌.动态系统故障诊断及预测研究[硕士学位论文], 清华大学, 中国, 2011.Xu Gui-Bin. Researches on Fault Diagnosis and Prediction in Dynamic Systems[Master dissertation], Tsinghua University, China, 2011. [16] Krasnobaev V A, Krasnobaev L A. Application of Petri nets for the modeling of detection and location of intermittent faults in computers. Automation and Remote Control, 1989, 49(9):1198-1204 [17] Bennett S M, Patton R J, Daley S, Newton D A. Torque and flux estimation for a rail traction system in the presence of intermittent sensor faults. In:Proceedings of United Kingdom Automatic Control Council International Conference on Control'96. Exeter University, UK:IET, 1996. 72-77 [18] Wang Y, Xu G H, Zhang Q, Liu D, Jiang K S. Rotating speed isolation and its application to rolling element bearing fault diagnosis under large speed variation conditions. Journal of Sound and Vibration, 2015, 348:381-396 doi: 10.1016/j.jsv.2015.03.018 [19] Zhou C J, Huang X F, Xiong N X, Qin Y Q, Huang S. A class of general transient faults propagation analysis for networked control systems. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2015, 45(4):647-661 doi: 10.1109/TSMC.2014.2384480 [20] 顾洲, 张建华, 杜黎龙.一类具有间歇性执行器故障的时滞系统的容错控制.控制与决策, 2011, 26(12):1829-1834 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201112014.htmGu Zhou, Zhang Jian-Hua, Du Li-Long. Fault tolerant control for a class of time-delay systems with intermittent actuators failure. Control and Decision, 2011, 26(12):1829-1834 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201112014.htm [21] Edelmayer A, Bokor J, Szigeti F, Keviczky L. Robust detection filter design in the presence of time-varying system perturbations. Automatica, 1997, 33(3):471-475 doi: 10.1016/S0005-1098(96)00189-6 [22] Kudva P, Viswanadham N, Ramakrishna A. Observers for linear systems with unknown inputs. IEEE Transactions on Automatic Control, 1980, 25(1):113-115 doi: 10.1109/TAC.1980.1102245 [23] Meskin N, Khorasani K. Fault detection and isolation of discrete-time Markovian jump linear systems with application to a network of multi-agent systems having imperfect communication channels. Automatica, 2009, 45(9):2032-2040 doi: 10.1016/j.automatica.2009.04.020 -

 下载:
下载:

计量
- 文章访问数: 2738
- HTML全文浏览量: 331
- PDF下载量: 1825
- 被引次数: 0
