

-
摘要: 近年来,深度学习在图像和语音处理领域已经取得显著进展,但是在同属人类认知范畴的自然语言处理任务中,研究还未取得重大突破.本文首先从深度学习的应用动机、首要任务及基本框架等角度介绍了深度学习的基本概念;其次,围绕数据表示和学习模型两方面,重点分析讨论了当前面向自然语言处理的深度学习研究进展及其应用策略;并进一步介绍了已有的深度学习平台和工具;最后,对深度学习在自然语言处理领域的发展趋势和有待深入研究的难点进行了展望.Abstract: Recently, deep learning has made significant development in the fields of image and voice processing. However, there is no major breakthrough in natural language processing task which belongs to the same category of human cognition. In this paper, firstly the basic concepts of deep learning are introduced, such as application motivation, primary task and basic framework. Secondly, in terms of both data representation and learning model, this paper focuses on the current research progress and application strategies of deep learning for natural language processing, and further describes the current deep learning platforms and tools. Finally, the future development difficulties and suggestions for possible extensions are also discussed.
-
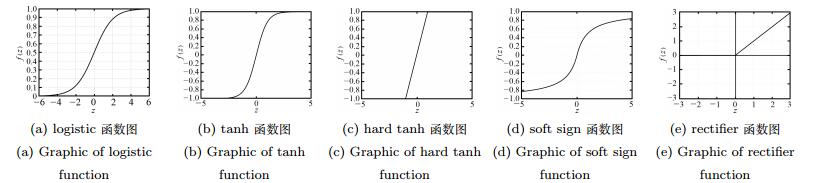
图 9 几种常用的非线性化函数可视化表示
Fig. 9 Visual representation of several commonly used nonlinear functions
任务领域 原始输入 浅层特征 中间特征 高层特征 训练目标 语音 样本 频段 声音 音调 音素 – 单词 语音识别 图像 像素 线条 纹理 图案 局部 – 物体 图像识别 文本 字母 单词 词组 短语 句子 段落 文章 语义理解  下载: 导出CSV
下载: 导出CSV
模型 浅层模型 深层模型 理论 有成熟的理论基础 理论分析困难 模型层数 1~2层 5~10层 训练难度 容易 复杂, 需要较多技巧 数据需求 仅需要简单特征的任务, 如发电机故障诊断、时间序列处理等 需要高度抽象特征的任务, 如语音识别、图像处理等 模型表达能力 有限 强大 特征提取方式 特征工程 特征自动抽取 代价函数凸性 凸代价函数; 没有局部最优点; 可以收敛到全局最优 高度非凸的代价函数; 存在大量的局部最优点; 容易收敛到局部最优 先验知识依赖度 依赖更多先验知识 依赖较少先验知识
下载: 导出CSV
-
[1] Erhan D, Bengio Y, Couville A, Manzagol P A, Vincent P, Samy B. Why does unsupervised pre-training help deep learning? Journal of Machine Learning Research, 2010, 11:625-660 http://research.google.com/pubs/archive/35536.pdf [2] 孙志军, 薛磊, 许阳明, 王正.深度学习研究综述.计算机应用研究, 2012, 29(8):2806-2810 http://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201501011.htmSun Zhi-Jun, Xue Lei, Xu Yang-Ming, Wang Zheng. Overview of deep learning. Application Research of Computers, 2012, 29(8):2806-2810 http://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201501011.htm [3] Bengio Y. Learning deep architectures for AI. Foundations and Trends® in Machine Learning, 2009, 2(1):1-127 doi: 10.1561/2200000006 [4] Hinton G E, Osindero S, Teh Y W. A fast learning algorithm for deep belief nets. Neural Computation, 2006, 18(7):1527-1554 doi: 10.1162/neco.2006.18.7.1527 [5] Hinton G E, Salakhutdinov R R. Reducing the dimensionality of data with neural networks. Science, 2006, 313(5786):504-507 doi: 10.1126/science.1127647 [6] Bengio Y, Lamblin P, Popovici D, Larochelle H. Greedy layer-wise training of deep networks. In:Proceedings of the 2007 Advances in Neural Information Processing Systems 19(NIPS'06). Vancouver, Canada:MIT Press, 2007. 153-160 [7] Ranzato M A, Poultney C, Chopra S, LeCun Y. Efficient learning of sparse representations with an energy-based model. In:Proceedings of the 2007 Advances in Neural Information Processing Systems 19(NIPS'06). Vancouver, Canada:MIT Press, 2007. 1137-1144 [8] Weston J, Ratle F, Collobert R. Deep learning via semi-supervised embedding. In:Proceedings of the 25th International Conference on Machine Learning (ICML'08). New York, USA:ACM Press, 2008. 1168-1175 [9] Srivastava N, Mansimov E, Salakhutdinov R. Unsupervised learning of video representations using LSTMs. In:Proceedings of the 32nd International Conference on Machine Learning (ICML'15). Lille, France:Omni Press, 2015. 843-852 [10] Jia K, Sun L, Gao S H, Song Z, Shi B E. Laplacian auto-encoders:an explicit learning of nonlinear data manifold. Neurocomputing, 2015, 160:250-260 doi: 10.1016/j.neucom.2015.02.023 [11] Chan T H, Jia K, Gao S H, Lu J W, Zeng Z N, Ma Y. PCANet:a simple deep learning baseline for image classification? IEEE Transactions on Image Processing, 2015, 24(12):5017-5032 doi: 10.1109/TIP.2015.2475625 [12] Alain G, Bengio Y. What regularized auto-encoders learn from the data-generating distribution? The Journal of Machine Learning Research, 2014, 15(1):3563-3593 http://www.taodocs.com/p-61696734.html [13] Srivastava N, Hinton G, Krizhevsky A, Sutskever I, Salakhutdinov R. Dropout:a simple way to prevent neural networks from overfitting. The Journal of Machine Learning Research, 2014, 15(1):1929-1958 http://www.cs.toronto.edu/~rsalakhu/papers/srivastava14a.pdf [14] Dosovitskiy A, Springenberg J T, Riedmiller M, Brox T. Discriminative unsupervised feature learning with convolutional neural networks. In:Proceedings of the 2014 Advances in Neural Information Processing Systems 27(NIPS'14). Montréal, Quebec, Canada:MIT Press, 2014. 766-774 [15] Sun Y, Wang X G, Tang X O. Deep learning face representation from predicting 10000 classes. In:Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, Ohio, USA:IEEE, 2014. 1891-1898 [16] 乔俊飞, 潘广源, 韩红桂.一种连续型深度信念网的设计与应用.自动化学报, 2015, 41(12):2138-2146 http://www.aas.net.cn/CN/abstract/abstract18786.shtmlQiao Jun-Fei, Pan Guang-Yuan, Han Hong-Gui. Design and application of continuous deep belief network. Acta Automatica Sinica, 2015, 41(12):2138-2146 http://www.aas.net.cn/CN/abstract/abstract18786.shtml [17] Längkvist M, Karlsson L, Loutfi A. A review of unsupervised feature learning and deep learning for time-series modeling. Pattern Recognition Letters, 2014, 42:11-24 doi: 10.1016/j.patrec.2014.01.008 [18] Han X F, Leung T, Jia Y Q, Sukthankar R, Berg A C. MatchNet:unifying feature and metric learning for patch-based matching. In:Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR'15). Boston, Massachusetts, USA:IEEE Press, 2015. 3279-3286 [19] Szegedy C, Liu W, Jia Y Q, Sermanet P, Reed S, Anguelov D, Erhan D, Vanhoucke V, Rabinovich A. Going deeper with convolutions. In:Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR'15). Boston, Massachusetts, USA:IEEE, 2015. 1-9 [20] Denton E L, Chintala S, Szlam A, Fergus R. Deep generative image models using a Laplacian pyramid of adversarial networks. In:Proceedings of the 2015 Advances in Neural Information Processing Systems 28(NIPS'15). Montreal, Canada:MIT Press, 2015. 1486-1494 [21] Dong C, Loy C C, He K M, Tang X O. Learning a deep convolutional network for image super-resolution. In:Proceedings of the 13th European Conference on Computer Vision (ECCV'14). Zurich, Switzerland:Springer International Publishing, 2014. 184-199 [22] Nie S Q, Wang Z H, Ji Q. A generative restricted Boltzmann machine based method for high-dimensional motion data modeling. Computer Vision and Image Understanding, 2015, 136:14-22 doi: 10.1016/j.cviu.2014.12.005 [23] Jain A, Tompson J, LeCun Y, Bregler C. Modeep:a deep learning framework using motion features for human pose estimation. In:Proceedings of the 12th Asian Conference on Computer Vision (ACCV'2014). Singapore:Springer International Publishing, 2015. 302-315 [24] 耿杰, 范剑超, 初佳兰, 王洪玉.基于深度协同稀疏编码网络的海洋浮筏SAR图像目标识别.自动化学报, 2016, 42(4):593-604 http://www.aas.net.cn/CN/abstract/abstract18846.shtmlGeng Jie, Fan Jian-Chao, Chu Jia-Lan, Wang Hong-Yu. Research on marine floating raft aquaculture SAR image target recognition based on deep collaborative sparse coding network. Acta Automatica Sinica, 2016, 42(4):593-604 http://www.aas.net.cn/CN/abstract/abstract18846.shtml [25] Erhan D, Szegedy C, Toshev A, Anguelov D. Scalable object detection using deep neural networks. In:Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR'14). Columbus, Ohio, USA:IEEE, 2014. 2155-2162 [26] Qi Y J, Das S G, Collobert R, Weston J. Deep learning for character-based information extraction. In:Proceedings of the 36th European Conference on IR Research on Advances in Information Retrieval. Amsterdam, The Netherland:Springer International Publishing, 2014. 668-674 [27] Nie L Q, Wang M, Zhang L M, Yan S C, Zhang B, Chua T S. Disease inference from health-related questions via sparse deep learning. IEEE Transactions on Knowledge and Data Engineering, 2015, 27(8):2107-2119 doi: 10.1109/TKDE.2015.2399298 [28] Collobert R, Weston J, Bottou L, Karlen M, Kavukcuoglu K, Kuksa P. Natural language processing (almost) from scratch. The Journal of Machine Learning Research, 2011, 12:2493-2537 http://jmlr.org/papers/volume12/collobert11a/collobert11a.pdf [29] Mnih A, Hinton G E. A scalable hierarchical distributed language model. In:Proceedings of the 2009 Advances in Neural Information Processing Systems 21(NIPS'08). Vancouver, Canada:MIT Press, 2009. 1081-1088 [30] Collobert R, Weston J. A unified architecture for natural language processing:deep neural networks with multitask learning. In:Proceedings of the 25th International Conference on Machine Learning (ICML'08). Helsinki, Finland:ACM Press, 2008. 160-167 [31] Olshausen B A, Field D J. Emergence of simple-cell receptive field properties by learning a sparse code for natural images. Nature, 1996, 381(6583):607-609 doi: 10.1038/381607a0 [32] Overview of deep learning and parallel implementation, available:http://djt.qq.com/article/view/1245, June20, 2016 [33] Hastad J. Computational Limitations for Small Depth Circuits. Cambridge, MA, USA:Massachusetts Institute of Technology, 1987 [34] Serre C, Mellot-Draznieks C, Surblé S, Audebrand N, Filinchuk Y, Férey G. Role of solvent-host interactions that lead to very large swelling of hybrid frameworks. Science, 2007, 315(5820):1828-1831 doi: 10.1126/science.1137975 [35] Salakhutdinov R R, Hinton G. Deep Boltzmann machines. In:Proceedings of the 12th International Conference on Artificial Intelligence and Statistics (AISTATS'09). Florida, USA:Omni Press, 2009. 448-455 [36] Bengio Y, Ducharme R, Vincent P, Jauvin C. A neural probabilistic language model. The Journal of Machine Learning Research, 2003, 3:1137-1155 http://www.academia.edu/7327284/A_Neural_Probabilistic_Language_Model [37] Mikolov T, Deoras A, Kombrink S, Burget L, Černocký J H. Empirical evaluation and combination of advanced language modeling techniques. In:Proceedings of the 2011 Conference of the International Speech Communication Association (INTERSPEECH'2011). Florence, Italy:ISCA Press, 2011. 605-608 [38] Schwenk H, Rousseau A, Attik M. Large, pruned or continuous space language models on a GPU for statistical machine translation. In:Proceedings of the NAACL-HLT 2012 Workshop:Will We ever Really Replace the N-gram Model? on the Future of Language Modeling for HLT. Montréal, Canada:ACL Press, 2012. 11-19 [39] Socher R, Huang E H, Pennington J, Ng A Y, Manning C D. Dynamic pooling and unfolding recursive autoencoders for paraphrase detection. In:Proceedings of the 2011 Advances in Neural Information Processing Systems 24(NIPS'11). Granada, Spain:MIT Press, 2011. 801-809 [40] Socher R, Huval B, Manning C D, Ng A Y. Semantic compositionality through recursive matrix-vector spaces. In:Proceedings of the 2012 Joint Conference on Empirical Methods in Natural Language Processing and Computational Natural Language Learning. Jeju Island, Korea:ACL Press, 2012. 1201-1211 [41] Le Q, Mikolov T. Distributed representations of sentences and documents. In:Proceedings of the 31st International Conference on Machine Learning (ICML'14). Beijing, China:ACM Press, 2014. 1188-1196 [42] Kim Y. Convolutional neural networks for sentence classification. In:Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP'2014). Doha, Qatar:ACL Press, 2014. 1746-1751 [43] Dahl G E, Yu D, Deng L, Acero A. Context-dependent pre-trained deep neural networks for large vocabulary speech recognition. IEEE Transactions on Audio, Speech, and Language Processing, 2012, 20(1):30-42 doi: 10.1109/TASL.2011.2134090 [44] Mohamed A R, Dahl G E, Hinton G. Acoustic modeling using deep belief networks. IEEE Transactions on Audio, Speech, and Language Processing, 2012, 20(1):14-22 doi: 10.1109/TASL.2011.2109382 [45] Mikolov T, Yih W T, Zweig G. Linguistic regularities in continuous space word representations. In:Proceedings of the 2013 Conference of the North American Chapter of the Association for Computational Linguistics (NAACL-HLT'2013). Atlanta, Georgia:ACL Press, 2013. 746-751 [46] Mikolov T, Sutskever I, Chen K, Corrado G S, Dean J. Distributed representations of words and phrases and their compositionality. In:Proceedings of the 2013 Advances in Neural Information Processing Systems 26(NIPS'13). Nevada, USA:MIT Press, 2013. 3111-3119 [47] Mikolov T, Karafiát M, Burget L, Černocký, Khudanpur S. Recurrent neural network based language model. In:Proceedings of the 2010 International Conference on Spoken Language Processing (ICSLP'2010). Chiba, Japan:Speech Communication Press, 2010. 1045-1048 [48] Mikolov T, Kombrink S, Burget L, Černocký J H, Khudanpur S. Extensions of recurrent neural network language model. In:Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Prague, Czech Republic:IEEE, 2011. 5528-5531 [49] Mikolov T, Deoras A, Povey D, Burget L, Černocký J H. Strategies for training large scale neural network language models. In:Proceedings of the 2011 IEEE Workshop on Automatic Speech Recognition and Understanding (ASRU). Waikoloa, Hawaii, USA:IEEE Press, 2011. 196-201 [50] Mikolov T, Zweig G. Context dependent recurrent neural network language model. In:Proceedings of the 2012 IEEE Conference on Spoken Language Technology (SLT). Miami, Florida, USA:IEEE, 2012. 234-239 [51] Socher R, Perelygin A, Wu J Y, Chuang J, Manning C D, Ng A Y, Potts C. Recursive deep models for semantic compositionality over a sentiment treebank. In:Proceedings of the 2013 Conference on Empirical Methods in Natural Language Processing (EMNLP'2013). Seattle, USA:ACL Press, 2013. 1631-1642 [52] Turian J, Ratinov L, Bengio Y. Word representations:a simple and general method for semi-supervised learning. In:Proceedings of the 48th Annual Meeting of the Association for Computational Linguistics (ACL'2010). Uppsala, Sweden:ACL Press, 2010. 384-394 [53] Firth J R. A synopsis of linguistic theory 1930-55. Studies in Linguistic Analysis. Oxford:Philological Society, 1957. 1-32 [54] Hinton G E. Learning distributed representations of concepts. In:Proceedings of the 8th Annual Conference of the Cognitive Science Society. Amherst, Massachusetts:Cognitive Science Society Press, 1986. 1-12 [55] Salton G. Automatic processing of foreign language documents. Journal of the American Society for Information Science, 1970, 21(3):187-194 doi: 10.1002/(ISSN)1097-4571 [56] Rapp R. Word sense discovery based on sense descriptor dissimilarity. In:Proceedings of the 9th Conference on Machine Translation Summit. New Orleans, USA:IAMT Press, 2003. 315-322 [57] Turney P D. Expressing implicit semantic relations without supervision. In:Proceedings of the 21st International Conference on Computational Linguistics and the 44th Annual Meeting of the Association for Computational Linguistics (COLING and ACL 2006). Sydney, Australia:ACL Press, 2006. 313-320 [58] Manning C D, Raghavan P, Schütze H. Introduction to Information Retrieval. Cambridge:Cambridge University Press, 2008. [59] Zheng X Q, Chen H Y, Xu T Y. Deep learning for Chinese word segmentation and POS tagging. In:Proceedings of the 2013 Conference on Empirical Methods in Natural Language Processing (EMNLP'2013). Seattle, Washington, USA:ACL Press, 2013. 647-657 [60] Xu W, Rudnicky A I. Can artificial neural networks learn language models? In:Proceedings of 2000 International Conference on Spoken Language Processing (ICSLP'2000). Beijing, China:Speech Communication Press, 2000. 202-205 [61] Mnih A, Hinton G. Three new graphical models for statistical language modelling. In:Proceedings of the 24th International Conference on Machine Learning (ICML'07). Corvallis, Oregon:ACM Press, 2007. 641-648 [62] Morin F, Bengio Y. Hierarchical probabilistic neural network language model. In:Proceedings of the 10th International Workshop on Artificial Intelligence and Statistics (AISTATS'2005). Barbados:Omni Press, 2005. 246-252 [63] Bordes A, Usunier N, Garcia-Durán A, Weston J, Yakhnenko O. Translating embeddings for modeling multi-relational data. In:Proceedings of the 2013 Advances in Neural Information Processing Systems 26(NIPS'13). Nevada, USA:MIT Press, 2013. 2787-2795 [64] Bengio Y. Deep learning of representations for unsupervised and transfer learning. In:Proceedings of the ICML2011 Unsupervised and Transfer Learning Workshop. Bellevue, Washington, USA:ACM Press, 2012. 17-37 [65] Le Q V, Ngiam J, Coates A, Lahiri A, Prochnow B, Ng A Y. On optimization methods for deep learning. In:Proceedings of the 28th International Conference on Machine Learning (ICML'11). Bellevue, Washington, USA:ACM Press, 2011. 67-105 [66] Henderson J. Neural network probability estimation for broad coverage parsing. In:Proceedings of the 10th Conference on European Chapter of the Association for Computational Linguistics (EACL'03). Budapest, Hungary:ACL Press, 2003. 131-138 [67] Henderson J. Discriminative training of a neural network statistical parser. In:Proceedings of the 42nd Annual Meeting on Association for Computational Linguistics (ACL'2004). Barcelona, Spain:ACL Press, 2004. 95-102 [68] Titov I, Henderson J. Porting statistical parsers with data-defined kernels. In:Proceedings of the 10th Conference on Computational Natural Language Learning (CoNLL-2006). New York, USA:ACL Press, 2006. 6-13 [69] Titov I, Henderson J. Constituent parsing with incremental sigmoid belief networks. In:Proceedings of the 45th Annual Meeting on Association for Computational Linguistics (ACL'2007). Prague, Czech Republic:ACL Press, 2007. 632-639 [70] Collobert R. Deep learning for efficient discriminative parsing. In:Proceedings of the 14th International Conference on Artificial Intelligence and Statistics (AISTATS'2011). Fort Lauderdale, Florida, USA:Omni Press, 2011. 224-232 [71] Costa F, Frasconi P, Lombardo V, Soda G. Towards incremental parsing of natural language using recursive neural networks. Applied Intelligence, 2003, 19(1-2):9-25 https://pdfs.semanticscholar.org/f570/6d576037dcf6d412c65373e9c787060cd64f.pdf [72] Menchetti S, Costa F, Frasconi P, Pontil M. Wide coverage natural language processing using kernel methods and neural networks for structured data. Pattern Recognition Letters, 2005, 26(12):1896-1906 doi: 10.1016/j.patrec.2005.03.011 [73] Collins M. Head-driven statistical models for natural language parsing. Computational linguistics, 2003, 29(4):589-637 doi: 10.1162/089120103322753356 [74] Socher R, Bauer J, Manning C D, Ng A Y. Parsing with compositional vector grammars. In:Proceedings of the 51st Annual Meeting on Association for Computational Linguistics (ACL'2013). Sofia, Bulgaria:ACL Press, 2013. 455-465 [75] Legrand J, Collobert R. Recurrent greedy parsing with neural networks. In:Proceedings of the 2014 European Conference on Machine Learning and Knowledge Discovery in Databases. Nancy, France:Springer Press, 2014. 130-144 [76] Huang E H, Socher R, Manning C D, Ng A Y. Improving word representations via global context and multiple word prototypes. In:Proceedings of the 50th Annual Meeting of the Association for Computational Linguistics (ACL'2012). Jeju Island, Korea:ACL Press, 2012. 873-882 [77] Zhou S S, Chen Q C, Wang X L. Active deep networks for semi-supervised sentiment classification. In:Proceedings of the 23rd International Conference on Computational Linguistics (COLING'2010). Beijing, China:ACL Press, 2010. 1515-1523 [78] Glorot X, Bordes A, Bengio Y. Domain adaptation for large-scale sentiment classification:a deep learning approach. In:Proceedings of the 28th International Conference on Machine Learning (ICML'11). Bellevue, Washington, USA:Omni Press, 2011. 513-520 [79] Socher R, Pennington J, Huang E H, Ng A Y, Manning C D. Semi-supervised recursive autoencoders for predicting sentiment distributions. In:Proceedings of the 2011 Conference on Empirical Methods in Natural Language Processing (EMNLP'2011). Edinburgh, UK:ACL Press, 2011. 151-161 [80] Liu L M, Watanabe T, Sumita E, Zhao T J. Additive neural networks for statistical machine translation. In:Proceedings of the 51st Annual Meeting of the Association for Computational Linguistics (ACL'2013). Sofa, Bulgaria:ACL Press, 2013. 791-801 [81] Yang N, Liu S J, Li M, Zhou M, Yu N H. Word alignment modeling with context dependent deep neural network. In:Proceedings of the 51st Annual Meeting of the Association for Computational Linguistics (ACL'2013). Sofa, Bulgaria:ACL Press, 2013. 166-175 [82] Kalchbrenner N, Blunsom P. Recurrent continuous translation models. In:Proceedings of the 2013 Conference on Empirical Methods in Natural Language Processing (EMNLP'2013). Seattle, Washington, USA:ACL Press, 2013. 1700-1709 [83] Sutskever I, Vinyals O, Le Q V. Sequence to sequence learning with neural networks. In:Proceedings of the 2014 Advances in Neural Information Processing Systems 27(NIPS'14). Montréal, Quebec, Canada:MIT Press, 2014. 3104-3112 [84] Cho K, van Merriënboer B, Gulcehre C, Bahdanau D, Bougares F, Schwenk H, Bengio Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. In:Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP'2014). Doha, Qatar:ACL Press, 2014. 1724-1734 [85] Cho K, van Merriënboer B, Bahdanau D, Bengio Y. On the properties of neural machine translation:encoder-decoder approaches. In:Proceedings of the 8th Workshop on Syntax, Semantics and Structure in Statistical Translation (SSST-8). Doha, Qatar:ACL Press, 2014. 103-111 [86] Bahdanau D, Cho K, Bengio Y. Neural machine translation by jointly learning to align and translate. In:Proceedings of the 3rd International Conference on Learning Representations (ICLR'2015). San Diego, California, USA:arXiv Press, 2015. 1409.0473V7 [87] Dong D X, Wu H, He W, Yu D H, Wang H F. Multi-task learning for multiple language translation. In:Proceedings of the 53rd Annual Meeting on Association for Computational Linguistics and the 7th International Joint Conference on Natural Language Processing. Beijing, China:ACL Press, 2015. 1723-1732 [88] Pinheiro P O, Collobert R. Recurrent convolutional neural networks for scene labeling. In:Proceedings of the 31st International Conference on Machine Learning (ICML'14). Beijing, China, 2014. 82-90 http://wenku.baidu.com/view/b6cc3becccbff121dc368336.html [89] Le Q V. Building high-level features using large scale unsupervised learning. In:Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing. Vancouver, BC:IEEE, 2013. 8595-8598 [90] 田渊栋.阿法狗围棋系统的简要分析.自动化学报, 2016, 42(5):671-675 http://www.aas.net.cn/CN/abstract/abstract18856.shtmlTian Yuan-Dong. A simple analysis of AlphaGo. Acta Automatica Sinica, 2016, 42(5):671-675 http://www.aas.net.cn/CN/abstract/abstract18856.shtml -

 下载:
下载:



图(9) / 表(2)
计量
- 文章访问数: 7062
- HTML全文浏览量: 3961
- PDF下载量: 4572
- 被引次数: 0
