

-
摘要: 3D打印技术是一种新兴的增材制造技术,许多人认为是一项将要改变世界的“破坏性”技术,并声称该技术将引发新一轮工业革命.本文根据3D打印技术涉及的不同核心成型技术、材料和设备体积等,介绍了3D打印技术的不同分类,综述了主流3D打印过程控制技术,指出了3D打印技术的控制系统存在的问题并提出了产业化进程中的建议和意见.Abstract: 3D printing is a new add manufacturing technology, and many people think it is a "destructive" technology that will change the world, claim it will trigger a new round of industrial revolution. According to 3D printing technology involved in different core forming technologies, materials and equipment volumes, this paper introduces the different classifications of 3D printing technology, overviews the mainstream 3D printing technology control system, discusses the problems existing in the control system of 3D printing, and provides suggestions and advices for the process of industrialization.
-
近年来, 基于随机有限集的多目标跟踪算法[1-2]引起了学者们的广泛关注.它从集值估计的角度来解决多目标跟踪问题, 避免了传统多目标跟踪算法中复杂的数据关联过程.众所周知, 数据关联一直是多目标跟踪问题的一个难点, 尤其是在目标个数较多且存在杂波的情况下, 关联过程将变得非常复杂.基于随机有限集的多目标跟踪算法利用随机有限集对多目标的状态和观测建模, 在贝叶斯滤波框架下通过递推后验多目标密度来解决多目标跟踪问题.该类算法主要包括概率假设密度(Probability hypothesis density, PHD)滤波器[3-5]、势概率假设密度(Cardinality PHD, CPHD)滤波器[6-7]和势均衡多目标多伯努利(Cardinality balanced multi-target multi-Bernoulli, CBMeMBer)滤波器[8].不同于PHD和CPHD滤波器递推多目标密度的强度和势分布估计, CBMeMBer滤波器直接近似递推后验多目标密度, 使得多目标跟踪问题的求解显得更为直观.随后, 学者们对CBMeMBer滤波器进行了深入地研究, 并取得了一些研究成果[9-13].
基于随机有限集的多目标跟踪算法主要包括高斯混合(Gaussian mixture, GM)和序贯蒙特卡洛(Sequential Monte Carlo, SMC)两种实现方法.这两种实现方法的前提条件是目标的状态和观测模型为隐马尔科夫模型(Hidden Markov model, HMM), 即目标的状态演化过程是一个马尔科夫过程, 而k时刻目标的量测只与当前时刻目标的状态有关.但在实际应用中, 目标模型不一定满足HMM隐含的马尔科夫假设和独立性假设条件.例如过程噪声与量测噪声相关或量测噪声为有色噪声的情况[14].文献[15-18]等提出一种比HMM更为一般化的Pairwise马尔科夫模型(Pairwise Markov model, PMM), 它将目标的状态和量测整体看作一个马尔科夫过程.与HMM的区别在于: 1)目标的状态不一定为马尔科夫过程; 2)目标的量测不仅与当前时刻的状态有关, 而且与该目标上一时刻的量测也有关系[15].因此, 在解决一些实际问题时采用PMM比采用HMM的效果更好.例如在分割问题中, 采用PMM代替HMM可以有效地降低误差率[19].
本文的研究目的是在PMM框架下利用随机有限集解决杂波环境下的多目标跟踪问题.文献[[20-21]已经给出了在PMM框架下的PHD滤波器及其GM实现.但是当目标数较多时, 该滤波器对目标个数的估计会出现欠估计的情况, 且估计精度和效率较差.本文给出了PMM框架下CBMeMBer滤波器的递推过程, 并给出它在线性高斯PMM条件下的GM实现.最后, 采用文献[21]提出的一种满足HMM局部物理特性的线性高斯PMM, 将本文所提算法与GM-PMM-PHD滤波器进行比较.实验结果表明, 本文所提算法对目标数的估计是无偏的, 不存在GM-PMM-PHD滤波器在目标数较多时出现欠估计的情况, 并且本文所提算法的估计精度和效率也优于GM-PMM-PHD滤波器.
1. HMM和PMM
1.1 HMM
在信号处理过程中, 一个重要问题是根据可观测的量测$y\!=\!{{\left\{ {{\mathit{\boldsymbol{y}}}_{k}} \right\}}_{k\in \rm{IN}}}$估计不可观测的状态$x\!=\!{{\left\{ {{\mathit{\boldsymbol{x}}}_{k}} \right\}}_{k\in \rm{IN}}}$, IN表示整数.在HMM中, 假设x为马尔科夫过程, 且k时刻的量测${{\mathit{\boldsymbol{y}}}_{k}}$只与当前时刻的状态${{\mathit{\boldsymbol{x}}}_{k}}$有关, 即[15]
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{0:k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right) \end{equation}
(1) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{y}}}_{0:k}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)=\prod\limits_{i=0}^{k}{p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)} \end{equation}
(2) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{0:k}} \right)=p\left( {{\mathit{\boldsymbol{y}}}_{i}}|{{\mathit{\boldsymbol{x}}}_{i}} \right), \quad 0\le i\le k \end{equation}
(3) $p\left( \cdot \right)$表示概率密度函数.状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$可由Bayes递推算法得到[22]:
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right)=\!\int\!{p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k-1}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right){\rm d}{{\mathit{\boldsymbol{x}}}_{k-1}}} \end{equation}
(4) \begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)\propto p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right) \end{equation}
(5) 在实际应用中, 由于Bayes公式中存在积分运算, 通常不能得到它的解析解.为了使Bayes公式能够递推运算, 考虑如下线性HMM
\begin{equation}\label{} {{\mathit{\boldsymbol{x}}}_{k}}={{F}_{k}}{{\mathit{\boldsymbol{x}}}_{k-1}}+{{\mathit{\boldsymbol{u}}}_{k}} \end{equation}
(6) \begin{equation}\label{} {{\mathit{\boldsymbol{y}}}_{k}}={{H}_{k}}{{\mathit{\boldsymbol{x}}}_{k}}+{{\mathit{\boldsymbol{v}}}_{k}} \end{equation}
(7) ${{F}_{k}}$和${{H}_{k}}$分别表示状态转移矩阵和观测矩阵. ${{\mathit{\boldsymbol{u}}}_{k}}$和${{\mathit{\boldsymbol{v}}}_{k}}$分别表示零均值的过程噪声和量测噪声, 与初始状态${{\mathit{\boldsymbol{x}}}_{0}}$相互独立.若${{\mathit{\boldsymbol{v}}}_{k}}$、${{\mathit{\boldsymbol{u}}}_{k}}$和${{\mathit{\boldsymbol{x}}}_{0}}$均为高斯变量, 则状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$为高斯分布, 可以用它的均值和协方差描述.此时, $p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$的Bayes递推过程退化为经典的卡尔曼滤波器[23].
1.2 PMM
在过程噪声与量测噪声相关或量测噪声为有色噪声的情况下, 目标模型不满足HMM隐含的马尔科夫假设和独立性假设条件.此时, 再利用HMM建模是不合适的.文献[15]提出一种比HMM更为一般化的PMM, 它将状态和量测整体$\varepsilon \!=\!\left( x, y \right)$看作马尔科夫过程, 即
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{\varepsilon }}}_{k}}|{{\mathit{\boldsymbol{\varepsilon }}}_{0:k-1}} \right)=p\left( {{\mathit{\boldsymbol{\varepsilon }} }_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right) \end{equation}
(8) 可以有效地处理上述复杂的目标跟踪场景.
在PMM中, x不一定为马尔科夫过程, 且${{\mathit{\boldsymbol{y}}}_{k}}$不仅与当前时刻的状态${{\mathit{\boldsymbol{x}}}_{k}}$有关, 同时与${{\mathit{\boldsymbol{x}}}_{k-1}}$和${{\mathit{\boldsymbol{y}}}_{k-1}}$也有关系.当$p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$满足
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)=p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right) \end{equation}
(9) 时, PMM就退化为HMM, 即HMM是PMM的一种特殊情况.在PMM框架下, 状态${{\mathit{\boldsymbol{x}}}_{k}}$的后验概率密度$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)$的Bayes公式为[15]
\begin{equation}\label{} p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{y}}}_{0:k}} \right)\propto \int{p\left( {{\mathit{\boldsymbol{\varepsilon }}}_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)p\left( {{\mathit{\boldsymbol{x}}}_{k-1}}|{{\mathit{\boldsymbol{y}}}_{0:k-1}} \right){\rm d}{{\mathit{\boldsymbol{x}}}_{k-1}}} \end{equation}
(10) 与HMM框架下的Bayes递推算法的不同之处在于它采用$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$和$p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}}, {{\mathit{\boldsymbol{x}}}_{k-1}}, {{\mathit{\boldsymbol{y}}}_{k-1}} \right)$分别代替$p\left( {{\mathit{\boldsymbol{x}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k-1}} \right)$和$p\left( {{\mathit{\boldsymbol{y}}}_{k}}|{{\mathit{\boldsymbol{x}}}_{k}} \right)$.同样, 上式没有解析解.
在线性高斯条件下, PMM模型可以描述为
\begin{equation}\label{} \underbrace{\left[\begin{matrix} {{\mathit{\boldsymbol{x}}}_{k}} \\ {{\mathit{\boldsymbol{y}}}_{k}} \\ \end{matrix} \right]}_{{{\mathit{\boldsymbol{\varepsilon }}}_{k}}}=\underbrace{\left[\begin{matrix} F_{k}^{1}&F_{k}^{2} \\ H_{k}^{1}&H_{k}^{2} \\ \end{matrix} \right]}_{{{B}_{k}}}\underbrace{\left[\begin{matrix} {{\mathit{\boldsymbol{x}}}_{k-1}} \\ {{\mathit{\boldsymbol{y}}}_{k-1}} \\ \end{matrix} \right]}_{{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}}}+{{\mathit{\boldsymbol{w}}}_{k}} \end{equation}
(11) 其中, ${{\left\{ {{\mathit{\boldsymbol{w}}}_{k}} \right\}}_{k\in \rm{IN}}}$表示零均值的高斯白噪声, 它的协方差为
\begin{equation}\label{} {\rm{E}}\left( {{\mathit{\boldsymbol{w}}}_{k}}\mathit{\boldsymbol{w}}_{k}^{\rm{T}} \right)={{\Sigma }_{k}}=\left[\begin{matrix} \Sigma _{k}^{11}&\Sigma _{k}^{12} \\ \Sigma _{k}^{21}&\Sigma _{k}^{22} \\ \end{matrix} \right] \end{equation}
(12) ${{\left\{ {{\mathit{\boldsymbol{w}}}_{k}} \right\}}_{k\in \rm{IN}}}$与初始状态${{\mathit{\boldsymbol{\varepsilon }}}_{0}}$相互独立. ${{\mathit{\boldsymbol{\varepsilon }} }_{0}}$服从正态分布N$\left( \cdot ;{{\mathit{\boldsymbol{m}}}_{0}}, {{P}_{0}} \right)$, ${{\mathit{\boldsymbol{m}}}_{0}}$和${{P}_{0}}$分别表示它的均值和协方差.文献[15]给出了在PMM框架下的卡尔曼滤波器.
2. PMM-CBMeMBer滤波器及其GM实现
文献[8]已经给出在HMM框架下CBMeMBer滤波器的递推过程, 这里不再赘述.下面将直接给出在PMM框架下CBMeMBer滤波器的递推过程, 以及它在线性高斯PMM条件下的GM实现.
2.1 PMM-CBMeMBer滤波器
k时刻监控区域内${{M}_{k}}$个目标的状态集合记为${{X}_{k}}\!\!=\!\!\left\{ \mathit{\boldsymbol{\varepsilon }} _{k}^{\left( i \right)} \right\}_{i=1}^{{{M}_{k}}}$, 其中${{\mathit{\boldsymbol{\varepsilon }}}_{k}}\!\!=\!\!{{\left[\mathit{\boldsymbol{x}}_{k}^{\rm{T}}, \mathit{\boldsymbol{y}}_{k}^{\rm{T}} \right]}^{\rm{T}}}$, ${\mathit{\boldsymbol{x}}_{k}}$和${\mathit{\boldsymbol{y}}_{k}}$分别表示目标的动力学状态和量测.在PMM框架下, $\varepsilon $是一个马尔科夫过程, 它的状态转移概率密度$p\left( {{\mathit{\boldsymbol{\varepsilon }} }_{k}}|{{\mathit{\boldsymbol{\varepsilon }} }_{k-1}} \right)$包含目标的动力学演化模型$p\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$和传感器的量测模型$p\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}}, {\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$.根据目标的物理特性, 假设目标的存活概率仅与目标的动力学状态有关, 记为${{p}_{s, k}}\left( {\mathit{\boldsymbol{x}}_{k}} \right)$.
k时刻传感器的量测集合记为${{Z}_{k}}\!=\!\left\{ \mathit{\boldsymbol{z}}_{k}^{\left( i \right)} \right\}_{i=1}^{{{N}_{k}}}$, ${{N}_{k}}$表示量测的个数. ${{Z}_{k}}$由源于目标的量测和杂波量测构成, 两者不可区分.根据传感器的物理特性, 假设传感器的检测概率仅与目标的动力学状态有关, 记为${{p}_{d, k}}\left( {\mathit{\boldsymbol{x}}_{k}} \right)$.
在满足如下假设条件下:
1) ${\varepsilon}$为马尔科夫过程, 目标之间相互独立;
2) 新生目标为多伯努利随机有限集, 与存活目标相互独立;
3) 杂波量测与目标产生的量测相互独立, 杂波数服从泊松分布.
PMM-CBMeMBer滤波器的递推过程如下:
步骤1.预测步
假设$k-1$时刻后验多目标密度为多伯努利形式:
\begin{equation}\label{} {{\pi }_{k-1}}=\left\{ \left( r_{k-1}^{\left( i \right)}, p_{k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k-1}}} \end{equation}
(13) $r_{k-1}^{\left( i \right)}\in \left[0, 1 \right]$, 表示$k-1$时刻第i个目标的存在概率, $p_{k-1}^{\left( i \right)}\left( {\mathit{\boldsymbol{\varepsilon }}_{i}} \right)$表示${\mathit{\boldsymbol{\varepsilon }}_{i}}$的概率密度, ${{M}_{k-1}}$表示$k-1$时刻可能出现的最大目标数.则预测多目标密度也为多伯努利形式:
\begin{equation}\label{} {{\pi }_{k|k-1}}\!\!=\!\!\left\{ \!\left( \!r_{P, k|k-1}^{\left( i \right)}, p_{P, k|k-1}^{\left( i \right)} \!\right) \!\right\}_{i=1}^{{{M}_{k-1}}}\!\!\bigcup\! \left\{ \!\left( \!r_{\Gamma, k}^{\left( i \right)}, p_{\Gamma, k}^{\left( i \right)} \!\right) \!\right\}_{i=1}^{{{M}_{\Gamma, k}}} \end{equation}
(14) 前一项表示存活目标的密度, 后一项表示k时刻新生目标的密度.
\begin{equation}\label{} r_{P, k|k-1}^{\left( i \right)}=r_{k-1}^{\left( i \right)}\left\langle p_{k-1}^{\left( i \right)}, {{p}_{s, k}} \right\rangle \end{equation}
(15) \begin{equation}\label{} p_{P, k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)=\frac{\left\langle {{p}_{k|k-1}}\left( \mathit{\boldsymbol{\varepsilon }} |\cdot \right), p_{k-1}^{\left( i \right)}{{p}_{s, k}} \right\rangle }{\left\langle p_{k-1}^{\left( i \right)}, {{p}_{s, k}} \right\rangle } \end{equation}
(16) $\left\langle \cdot, \cdot \right\rangle $表示内积运算, 如$\left\langle \alpha, \beta \right\rangle =\int{\alpha \left( x \right)\beta \left( x \right){\rm d}x}$.
步骤2.更新步
假设k时刻预测多目标密度为多伯努利形式
\begin{equation}\label{} {{\pi }_{k|k-1}}=\left\{ \left( r_{k|k-1}^{\left( i \right)}, p_{k|k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k|k-1}}} \end{equation}
(17) 则后验多目标密度可由如下多伯努利形式近似
\begin{equation}\label{} {{\pi }_{k}}\!\approx \!\left\{ \!\left( r_{L, k}^{\left( i \right)}, p_{L, k}^{\left( i \right)} \right) \!\right\}_{i=1}^{{{M}_{k|k-1}}}\!\!\bigcup\! {{\left\{ \!\left( {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)\!, {{p}_{U, k}}\!\left( \cdot ;\mathit{\boldsymbol{z}} \right)\! \right) \!\right\}}_{\mathit{\boldsymbol{z}}\in {{Z}_{k}}}} \end{equation}
(18) 前一项表示漏检部分的多目标密度, 后一项表示量测更新部分的多目标密度.
\begin{equation}\label{} r_{L, k}^{\left( i \right)}=r_{k|k-1}^{\left( i \right)}\frac{1-\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle }{1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle } \end{equation}
(19) \begin{equation}\label{} p_{L, k}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)=p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right)\frac{1-{{p}_{d, k}}\left( \mathit{\boldsymbol{x}} \right)}{1-\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle } \end{equation}
(20) \begin{equation}\label{} {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)\!=\!\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left( 1-r_{k|k-1}^{\left( i \right)} \right)\left\langle p_{k|k-1}^{\left( i \right)}, {{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }{{{\left( 1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle \right)}^{2}}}}}{{{\kappa }_{k}}\left( \mathit{\boldsymbol{z}} \right)\!+\!\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }{1-r_{k|k-1}^{\left( i \right)}\left\langle p_{k|k-1}^{\left( i \right)}, {{p}_{d, k}} \right\rangle }}} \end{equation}
(21) \begin{equation}\label{} {{p}_{U, k}}\left( \mathit{\boldsymbol{\varepsilon }} ;\mathit{\boldsymbol{z}} \right)\!=\!\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right){{\psi }_{k, \mathit{\boldsymbol{z}}}}\left( \mathit{\boldsymbol{\varepsilon }} \right)}}{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}\left\langle p_{k|k-1}^{\left( i \right)}{{\psi }_{k, \mathit{\boldsymbol{z}}}} \right\rangle }} \end{equation}
(22) ${{\psi }_{k, \mathit{\boldsymbol{z}}}}\left( \mathit{\boldsymbol{\varepsilon }} \right)={{p}_{d, k}}\left( \mathit{\boldsymbol{x}} \right){g_k}\left( {\mathit{\boldsymbol{z}}|\mathit{\boldsymbol{x}}} \right)$
${{\kappa }_{k}}\left( \cdot \right)$表示k时刻杂波的强度, ${g_k}\left( {\mathit{\boldsymbol{z}}|\mathit{\boldsymbol{x}}} \right)$表示目标$\mathit{\boldsymbol{x}}$的似然函数.
在上述递推过程中, 若状态转移函数${{p}_{k|k-1}}$满足式(9), 并且新生目标模型满足:
\begin{equation}\label{} {{\gamma }_{\Gamma, k}}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)={{g}_{k}}\left( \mathit{\boldsymbol{y}}|\mathit{\boldsymbol{x}} \right){{\tilde{\gamma }}_{\Gamma, k}}\left( \mathit{\boldsymbol{x}} \right) \end{equation}
(23) ${{\tilde{\gamma }}_{\Gamma, k}}\left( \mathit{\boldsymbol{x}} \right)$表示仅与目标动力学状态相关的新生目标密度函数.此时, PMM-CBMeMBer滤波算法就退化为HMM-CBMeMBer滤波算法.
2.2 PMM-CBMeMBer滤波器的GM实现
下面给出PMM-CBMeMBer滤波器在线性高斯条件下的GM实现.
在新生目标模型中, 若$p_{\Gamma, k}^{\left( i \right)}$为GM形式:
\begin{equation}\label{} p_{\Gamma, k}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\sum\limits_{j=1}^{J_{\Gamma, k}^{\left( i \right)}}{\omega _{\Gamma, k}^{\left( i, j \right)}N\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{\Gamma, k}^{\left( i, j \right)}, P_{\Gamma, k}^{\left( i, j \right)} \right)} \end{equation}
(24) 其中, $J_{\Gamma, k}^{\left( i \right)}$表示第i个目标对应的高斯项个数, $\omega _{\Gamma , k}^{\left( i, j \right)}$、$\mathit{\boldsymbol{m}}_{\Gamma, k}^{\left( i, j \right)}$和$P_{\Gamma, k}^{\left( i, j \right)}$分别表示第i个目标中第j个高斯项的权重、均值和协方差.则GM-PMM-CBMeMBer滤波器的递推过程如下:
步骤1.预测步
假设$k-1$时刻后验多目标密度
\begin{equation}\label{} {{\pi }_{k-1}}\!=\!\left\{\! \left( r_{k-1}^{1, \left( i \right)}, p_{k-1}^{1, \left( i \right)} \right)\! \right\}_{i=1}^{M_{k-1}^{1}}\!\bigcup\! \left\{\! \left( r_{k-1}^{2, \left( i \right)}, p_{k-1}^{2, \left( i \right)} \right)\! \right\}_{i=1}^{M_{k-1}^{2}} \end{equation}
(25) 已知, $p_{k-1}^{\ell, \left( i \right)}$, $\ell =\left\{ 1, 2 \right\}$, 为如下GM形式,
\begin{equation}\label{} p_{k-1}^{1, \left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)=\sum\limits_{j=1}^{J_{k-1}^{1, \left( i \right)}}{\omega _{k-1}^{1, \left( i, j \right)}{\rm N}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{k-1}^{1, \left( i, j \right)}, P_{k-1}^{1, \left( i, j \right)} \right)} \end{equation}
(26) \begin{equation}\label{} p_{k-1}^{2, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\!\sum\limits_{j=1}^{J_{k-1}^{2, \left( i \right)}}\!{\omega _{k-1}^{2, \left( i, j \right)}\!{\rm N}\!\!\left( \!\mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{k-1}^{2, \left( i, j \right)}\!, P_{k-1}^{2, \left( i, j \right)} \!\right)\!{{\delta }_{{{\mathit{\boldsymbol{z}}}^{\left( i \right)}}}}\!\left( \mathit{\boldsymbol{y}} \right)} \end{equation}
(27) ${{\delta }_{{{\mathit{\boldsymbol{z}}}^{\left( i \right)}}}}\!\left( \mathit{\boldsymbol{y}} \right)$为Dirac delta函数[2], ${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}\in {{Z}_{k-1}}$, ${\mathit{\boldsymbol{y}}}$表示状态为${\mathit{\boldsymbol{x}}}$对应的量测.若${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}=\mathit{\boldsymbol{y}}$, 说明${{\mathit{\boldsymbol{z}}}^{\left( i \right)}}$是由$\mathit{\boldsymbol{x}}$产生的量测; 否则, $\mathit{\boldsymbol{z}}^{\left( i \right)}$不是由${\mathit{\boldsymbol{x}}}$产生的量测.则预测多目标密度
\begin{align} {\pi _{k|k - 1}} \!=&\! \left\{ {\!\left( {r_{P, k|k - 1}^{1, \left( i \right)}, p_{P, k|k - 1}^{1, \left( i \right)}} \right)} \!\right\}_{i = 1}^{M_{k - 1}^1} \cup \nonumber\\ &\left\{ {\!\left( {r_{P, k|k - 1}^{2, \left( i \right)}, p_{P, k|k - 1}^{2, \left( i \right)}} \right)} \!\right\}_{i = 1}^{M_{k - 1}^2} \!\cup\!\nonumber\\ &\left\{ {\!\left( {r_{\Gamma, k}^{\left( i \right)}, p_{\Gamma, k}^{\left( i \right)}} \right)} \!\right\}_{i = 1}^{{M_{\Gamma, k}}} \end{align}
(28) 可由如下公式得到:
\begin{align} &r_{P, k|k-1}^{\ell, \left( i \right)}={{p}_{s, k}}r_{k-1}^{\ell , \left( i \right)}, \quad \ell =\left\{ 1, 2 \right\} \end{align}
(29) \begin{align} &p_{P, k|k-1}^{1, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\nonumber\\ &\qquad\sum\limits_{j=1}^{J_{k-1}^{1, \left( i \right)}}\!\!{\omega _{k-1}^{1, \left( i, j \right)}\!{\rm N}\!\!\left(\! \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{P, k|k-1}^{1, \left( i, j \right)}, P_{P, k|k-1}^{1, \left( i, j \right)} \!\right)}\end{align}
(30) \begin{align} &p_{P, k|k-1}^{2, \left( i \right)}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\nonumber\\ &\qquad\sum\limits_{j=1}^{J_{k-1}^{2, \left( i \right)}}\!\!{\omega _{k-1}^{2, \left( i, j \right)}\!{\rm N}\!\!\left( \!\mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{P, k|k-1}^{2, \left( i, j \right)}, P_{P, k|k-1}^{2, \left( i, j \right)} \!\right)} \end{align}
(31) 其中
\begin{equation}\label{} \mathit{\boldsymbol{m}}_{P, k|k-1}^{1, \left( i, j \right)}\!=\!{{B}_{k}}\mathit{\boldsymbol{m}}_{k-1}^{1, \left( i, j \right)}, \mathit{\boldsymbol{m}}_{P, k|k-1}^{2, \left( i, j \right)}\!=\!{{B}_{k}}\!\left[\begin{matrix} \mathit{\boldsymbol{m}}_{k-1}^{2, \left( i, j \right)} \\ {{\mathit{\boldsymbol{z}}}^{\left( i \right)}} \\ \end{matrix} \right] \end{equation}
(32) \begin{equation}\label{} P_{P, k|k-1}^{1, \left( i, j \right)}={{\Sigma }_{k}}+{{B}_{k}}P_{k-1}^{1, \left( i, j \right)}B_{k}^{\rm{T}} \end{equation}
(33) \begin{equation}\label{} P_{P, k|k-1}^{2, \left( i, j \right)}={{\Sigma }_{k}}+\left[\begin{matrix} F_{k}^{1} \\ H_{k}^{1} \\ \end{matrix} \right]P_{k-1}^{2, \left( i, j \right)}\left[\begin{matrix} {{\left( F_{k}^{1} \right)}^{\rm{T}}}&{{\left( H_{k}^{1} \right)}^{\rm{T}}} \\ \end{matrix} \right] \end{equation}
(34) 新生目标模型已知, $p_{\Gamma, k}^{\left( i \right)}$见式(24).
步骤2.更新步
在式(28)中, 由于组成预测多目标密度的三个部分形式相同, 令${{M}_{k|k-1}}=M_{k-1}^{1}+M_{k-1}^{2}+{{M}_{\Gamma, k}}$, 它们可以重写为
\begin{equation}\label{} {{\pi }_{k|k-1}}=\left\{ \left( r_{k|k-1}^{\left( i \right)}, p_{k|k-1}^{\left( i \right)} \right) \right\}_{i=1}^{{{M}_{k|k-1}}} \end{equation}
(35) \begin{equation}\label{} p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)\!=\!\sum\limits_{j=1}^{J_{k|k-1}^{\left( i \right)}}\!{\omega _{k|k-1}^{\left( i, j \right)}{\rm N}\!\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{m}}_{k|k-1}^{\left( i, j \right)}, P_{k|k-1}^{\left( i, j \right)} \right)} \end{equation}
(36) \begin{equation}\label{} \mathit{\boldsymbol{m}}_{k|k-1}^{\left( i, j \right)}\!=\!\left[\begin{matrix} \mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)} \\ \mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \\ \end{matrix} \right]\!, P_{k|k-1}^{\left( i, j \right)}\!=\!\left[\begin{matrix} P_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)} \!&\! P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)} \\ P_{k|k-1}^{\mathit{\boldsymbol{yx}}, \left( i, j \right)} \!&\! P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \\ \end{matrix} \right] \end{equation}
(37) 则更新多目标密度
\begin{align} {{\pi }_{k}}\!=&\!\left\{ \!\left( r_{L, k}^{\left( i \right)}, p_{L, k}^{\left( i \right)} \right) \!\right\}_{i=1}^{{{M}_{k|k-1}}}\!\bigcup\!\nonumber\\&{{\left\{ \!\left( {{r}_{U, k}}\!\left( \mathit{\boldsymbol{z}} \right)\!, {{p}_{U, k}}\!\left( \cdot ;\mathit{\boldsymbol{z}} \right) \right) \!\right\}}_{\mathit{\boldsymbol{z}}\in {{Z}_{k}}}} \end{align}
(38) 可由如下公式得到:
\begin{equation}\label{} r_{L, k}^{\left( i \right)}=r_{k|k-1}^{\left( i \right)}\frac{1-{{p}_{d, k}}}{1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}}} \end{equation}
(39) \begin{equation}\label{} p_{L, k}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right)=p_{k|k-1}^{\left( i \right)}\left( \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \right) \end{equation}
(40) \begin{equation}\label{} {{r}_{U, k}}\left( \mathit{\boldsymbol{z}} \right)=\frac{\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\left( 1-r_{k|k-1}^{\left( i \right)} \right)\rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)}{{{\left( 1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}} \right)}^{2}}}}}{{{\kappa }_{k}}\left( \mathit{\boldsymbol{z}} \right)+\sum\limits_{i=1}^{{{M}_{k|k-1}}}{\frac{r_{k|k-1}^{\left( i \right)}\rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)}{1-r_{k|k-1}^{\left( i \right)}{{p}_{d, k}}}}} \end{equation}
(41) \begin{equation}\label{} {p_{U, k}}\!\left( \!{\mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}};\mathit{\boldsymbol{z}}} \!\right)\! =\! \frac{{\sum\limits_{i = 1}^{{M_{k|k - 1}}}\! {\sum\limits_{j = 1}^{J_{k|k - 1}^{\left( i \right)}} \!\!{\omega _{U, k}^{\left( {i, j} \right)}\!\!\left( \mathit{\boldsymbol{z}} \right)\!{\rm N}\!\!\left( \! {\mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{U, k}^{\left( {i, j} \right)}\!, P_{U, k}^{\left( {i, j} \right)}} \!\right)} } }}{{\sum\limits_{i = 1}^{{M_{k|k - 1}}} {\sum\limits_{j = 1}^{J_{k|k - 1}^{\left( i \right)}} {\omega _{U, k}^{\left( {i, j} \right)}\left( \mathit{\boldsymbol{z}} \right)} } }} \end{equation}
(42) 其中
\begin{equation}\label{} \rho _{U, k}^{\left( i \right)}\left( \mathit{\boldsymbol{z}} \right)={{p}_{d, k}}\sum\limits_{j=1}^{J_{k|k-1}^{\left( i \right)}}{\omega _{k|k-1}^{\left( i, j \right)}q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)} \end{equation}
(43) \begin{equation}\label{} q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)={\rm N}\left( \mathit{\boldsymbol{z}};\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)}, P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right) \end{equation}
(44) \begin{equation}\label{} \omega _{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)=\frac{r_{k|k-1}^{\left( i \right)}}{1-r_{k|k-1}^{\left( i \right)}}{{p}_{d, k}}\omega _{k|k-1}^{\left( i, j \right)}q_{k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right) \end{equation}
(45) \begin{equation}\label{} \mathit{\boldsymbol{m}}_{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}} \right)=\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)}+K_{U, k}^{\left( i, j \right)}\left( \mathit{\boldsymbol{z}}-\mathit{\boldsymbol{m}}_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right) \end{equation}
(46) \begin{equation}\label{} P_{U, k}^{\left( i, j \right)}=P_{k|k-1}^{\mathit{\boldsymbol{x}}, \left( i, j \right)}-K_{U, k}^{\left( i, j \right)}{{\left( P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)} \right)}^{\rm{T}}} \end{equation}
(47) \begin{equation}\label{} K_{U, k}^{\left( i, j \right)}=P_{k|k-1}^{\mathit{\boldsymbol{xy}}, \left( i, j \right)}{{\left( P_{k|k-1}^{\mathit{\boldsymbol{y}}, \left( i, j \right)} \right)}^{-1}} \end{equation}
(48) 在更新步中, 漏检部分的状态包括动力学状态和相应的量测, 协方差也是动力学状态和量测整体的协方差; 量测更新部分给出了动力学状态的求解, 式(46)中的$\mathit{\boldsymbol{z}}$表示该动力学状态对应的量测, 式(47)为目标动力学状态的协方差, 不包括量测以及量测与动力学状态的协方差.即算法中漏检部分和量测更新部分对应的多目标密度的表示形式不同, 故在$k-1$时刻将多目标密度假设为相应的两部分.
根据GM-HMM-PHD滤波器得到的后验多目标强度的高斯项个数[5], 不难得到在不考虑衍生目标的情况下GM-HMM-CBMeMBer滤波器的后验多目标密度的高斯项个数为$\left(\! \sum\nolimits_{i=1}^{{{M}_{k-1}}}\!\!{J_{k-1}^{\left( i \right)}}\!+\!\sum\nolimits_{i=1}^{{{M}_{\Gamma, k}}}\!\!{J_{\Gamma , k}^{\left( i \right)}} \!\right)\!\left( \!1\!+\!\left| {{Z}_{k}} \right|\! \right)$, GM-PMM-CBMeMBer滤波器的后验多目标密度的高斯项个数为$\left( \! \sum\nolimits_{i=1}^{M_{k-1}^{1}}\!\!{J_{k-1}^{1, \left( i \right)}}\!+\!\sum\nolimits_{i=1}^{M_{k-1}^{2}}\!\!{J_{k-1}^{2, \left( i \right)}}\!+\!\sum\nolimits_{i=1}^{{{M}_{\Gamma , k}}}\!\!{J_{\Gamma, k}^{\left( i \right)}} \!\right)\!$ $(\! 1\!+\!| {{Z}_{k}} | \!)$.在相同场景下, GM-PMM-CBMeMBer滤波器和GM-HMM-CBMeMBer滤波器的计算复杂度为同一数量级.但由于GM-PMM-CBMeMBer滤波器状态维数的增加, 计算量会相应增大.
由于新生目标的出现和更新步中假设轨迹的平均化, 航迹个数和每条航迹对应的高斯项会逐渐增加, 需要采用剪切和合并技术[5]进行处理: 1)剪切.一是航迹的剪切, 去掉存在概率小于阈值为${{T}_{r}}$的航迹; 二是航迹对应的高斯项的剪切, 去掉权值小于阈值为${{T}_{\omega }}$的高斯项. 2)合并.在每条航迹中, 将距离小于阈值为U的高斯项进行合并.由于在后验多目标密度中漏检部分和量测更新部分对应的高斯项的形式不同, 在合并过程中需要加以区分.同时, 设定航迹数的最大值为${{M}_{\max }}$, 每条航迹对应的高斯项个数的最大值为${{J}_{\max }}$.最后, 对目标的状态进行提取.若航迹的存在概率大于给定阈值(如0.5), 则认为它是一个目标, 选择它对应的权值最大的高斯项作为目标的状态.
3. 仿真
3.1 一种满足HMM局部物理特性的PMM
文献[21]总结了过程噪声与量测噪声相关和量测噪声为有色噪声对应的PMM, 并提出一种满足HMM局部物理特性的PMM.为了与HMM框架下的CBMeMBer滤波器的性能进行比较, 本文采用上述满足HMM局部物理特性的PMM进行仿真实验.并将本文所提算法的跟踪性能与PHD滤波器[21]进行比较.下面首先给出该PMM的描述.
假设线性高斯HMM为
\begin{equation}\label{} p\left( {\mathit{\boldsymbol{x}}_{0}} \right)={\rm N}\left( {\mathit{\boldsymbol{x}}_{0}};{\mathit{\boldsymbol{m}}_{0}}, {{P}_{0}} \right) \end{equation}
(49) \begin{equation}\label{} {{f}_{k|k-1}}\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)={\rm N}\left( {\mathit{\boldsymbol{x}}_{k}};{{F}_{k}}{\mathit{\boldsymbol{x}}_{k-1}}, {{Q}_{k}} \right) \end{equation}
(50) \begin{equation}\label{} {{g}_{k}}\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}} \right)={\rm N}\left( {\mathit{\boldsymbol{y}}_{k}};{{H}_{k}}{\mathit{\boldsymbol{x}}_{k}}, {{R}_{k}} \right) \end{equation}
(51) 则满足$p\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)={{f}_{k|k-1}}\left( {\mathit{\boldsymbol{x}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}} \right)$, $p( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}})={{g}_{k}}\left( {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k}} \right)$, 且${{p}_{k|k-1}}=\left( {\mathit{\boldsymbol{x}}_{k}}, {\mathit{\boldsymbol{y}}_{k}}|{\mathit{\boldsymbol{x}}_{k-1}}, {\mathit{\boldsymbol{y}}_{k-1}} \right)$不依赖于参数$\left( {\mathit{\boldsymbol{m}}_{0}}, {{P}_{0}} \right)$的线性高斯PMM为
\begin{equation}\label{} p\left( {\mathit{\boldsymbol{\varepsilon }}_{0}} \right)\!=\!{\rm N}\left( {\mathit{\boldsymbol{\varepsilon }}_{0}};\left[\begin{matrix} {\mathit{\boldsymbol{m}}_{0}} \\ {{H}_{0}}{\mathit{\boldsymbol{m}}_{0}} \\ \end{matrix} \right]\!, \left[\begin{matrix} {{P}_{0}} \!&\! {{\left( {{H}_{0}}{{P}_{0}} \right)}^{\rm{T}}} \\ {{H}_{0}}{{P}_{0}}\! &\! {{R}_{0}}\!+\!{{H}_{0}}{{P}_{0}}H_{0}^{\rm{T}} \\ \end{matrix} \right] \right) \end{equation}
(52) \begin{equation}\label{} {{p}_{k|k-1}}\left( {\mathit{\boldsymbol{\varepsilon }}_{k}}|{\mathit{\boldsymbol{\varepsilon }}_{k-1}} \right)={\rm N}\left( {\mathit{\boldsymbol{\varepsilon }}_{k}};{{B}_{k}}{\mathit{\boldsymbol{\varepsilon }}_{k-1}}, {{\Sigma }_{k}} \right) \end{equation}
(53) 其中
\begin{equation}\label{} {{B}_{k}}=\left[\begin{matrix} {{F}_{k}}-F_{k}^{2}{{H}_{k-1}}&F_{k}^{2} \\ {{H}_{k}}{{F}_{k}}-H_{k}^{2}{{H}_{k-1}}&H_{k}^{2} \\ \end{matrix} \right] \end{equation}
(54) \begin{equation}\label{} {{\Sigma }_{k}}=\left[\begin{matrix} \Sigma _{k}^{11}&\Sigma _{k}^{12} \\ \Sigma _{k}^{21}&\Sigma _{k}^{22} \\ \end{matrix} \right] \end{equation}
(55) \begin{equation}\label{} \Sigma _{k}^{11}={{Q}_{k}}-F_{k}^{2}{{R}_{k-1}}{{\left( F_{k}^{2} \right)}^{\rm{T}}} \end{equation}
(56) \begin{equation}\label{} \Sigma _{k}^{21}={{\left( \Sigma _{k}^{12} \right)}^{\rm{T}}}={{H}_{k}}{{Q}_{k}}-H_{k}^{2}{{R}_{k-1}}{{\left( F_{k}^{2} \right)}^{\rm{T}}} \end{equation}
(57) \begin{equation}\label{} \Sigma _{k}^{22}={{R}_{k}}-H_{k}^{2}{{R}_{k-1}}{{\left( H_{k}^{2} \right)}^{\rm{T}}}+{{H}_{k}}{{Q}_{k}}H_{k}^{\rm{T}} \end{equation}
(58) 在满足${{\Sigma }_{k}}$为正定矩阵的情况下, $F_{k}^{2}$和$H_{k}^{2}$可以任意选取.
3.2 仿真分析
为了与PHD滤波器的跟踪性能进行比较, 依据文献[21]对上述PMM的参数进行设置.
\begin{equation}\label{} {{F}_{k}}=\left[\begin{matrix} 1&t&0&0 \\ 0&1&0&0 \\ 0&0&1&t \\ 0&0&0&1 \\ \end{matrix} \right], \quad {{H}_{k}}=\left[\begin{matrix} 1&0&0&0 \\ 0&0&1&0 \\ \end{matrix} \right] \end{equation}
(59) \begin{equation}\label{} {{Q}_{k}}=\left[\begin{matrix} 100&1&0&0 \\ 1&10&0&0 \\ 0&0&100&1 \\ 0&0&1&10 \\ \end{matrix} \right], \quad {{R}_{k}}=\left[\begin{matrix} {{10}^{2}}&0 \\ 0&{{10}^{2}} \\ \end{matrix} \right] \end{equation}
(60) \begin{equation}\label{} F_{k}^{2}=\left[\begin{matrix} a&0 \\ 0&0 \\ 0&b \\ 0&0 \\ \end{matrix} \right], \quad H_{k}^{2}=\left[\begin{matrix} c&0 \\ 0&d \\ \end{matrix} \right] \end{equation}
(61) 令$t=1$, $a=b=0.7$, $c=d=0.1$.仿真硬件环境为Matlab R2013b, Windows 10 64bit, Intel Core i5-4570 CPU 3.20GHz, RAM 4.00GB.
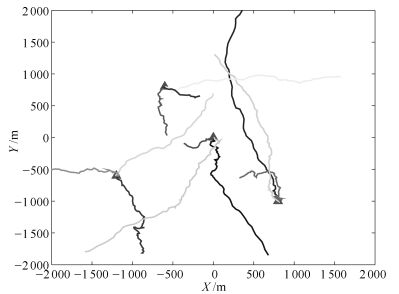
监控区域内有12个目标:目标1、2和3在$k=1$时出现, 4、5和6在$k=20$时出现, 7和8在$k=40$时出现, 9和10在$k=60$时出现, 11和12在$k=80$时出现, 而目标1和2在$k=70$时消失, 其他目标不消失.目标的状态为${\mathit{\boldsymbol{x}}_{k}}={{\left[ {{x}_{k}}, {{{\dot{x}}}_{k}}, {{y}_{k}}, {{{\dot{y}}}_{k}} \right]}^{\rm{T}}}$, ${{x}_{k}}$和${{y}_{k}}$表示二维笛卡尔坐标系下目标的位置, ${{\dot{x}}_{k}}$和${{\dot{y}}_{k}}$分别表示对应方向的速度.在监控区域$V=\left[-2000, ~2000 \right]\rm{m}\times \left[ -2000, ~2000 \right]m$中, 各采样时刻的杂波个数服从均值为20的泊松分布, 杂波量测在监控区域内均匀分布. 图 1是基于上述线性高斯PMM的目标运动轨迹, 红色三角形表示目标的初始位置.
CBMeMBer滤波器中新生目标的模型参数${{\pi }_{\Gamma }}\!\!=\!\!\left\{ \left( {{r}_{\Gamma }}, p_{\Gamma }^{\left( i \right)} \right) \right\}_{i=1}^{4}$设置如下:在HMM中, ${{r}_{\Gamma }}\!\!=\!\!0.01$, $p_{\Gamma }^{\left( i \right)}\left( x \right) \!\!=\!\!{\rm N}\left( \mathit{\boldsymbol{x}};\mathit{\boldsymbol{m}}_{\Gamma }^{\left( i \right)}, {{P}_{\Gamma }} \right)$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 1 \right)}\!\!=\!\!{{\left[0, 0, 0, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 2 \right)}\!\!=\!\!{{\left[400, 0, -600, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 3 \right)}\!\!=\!\!{{\left[-800, 0, -200, 0 \right]}^{\rm{T}}}$, $\mathit{\boldsymbol{m}}_{\Gamma }^{\left( 4 \right)}\!\!=\!\!{{\left[-200, 0, 800, 0 \right]}^{\rm{T}}}$, ${{P}_{\Gamma }}\!\!=\!\!\rm{diag}\left\{\!1000, 400, 1000, 400 \right\}$; 在PMM中, ${{r}_{\Gamma }}=0.01$,
$p_\Gamma ^{\left( i \right)}\left( \mathit{\boldsymbol{\varepsilon }} \right) = {\rm{N}}\left( {\mathit{\boldsymbol{\varepsilon }};\left[ {\begin{array}{*{20}{c}} {\mathit{\boldsymbol{m}}_\Gamma ^{\left( i \right)}}\\ {{H_k}\mathit{\boldsymbol{m}}_\Gamma ^{\left( i \right)}} \end{array}} \right],\left[ {\begin{array}{*{20}{c}} {{P_\Gamma }}&{{{\left( {{H_k}{P_\Gamma }} \right)}^{\rm{T}}}}\\ {{H_k}{P_\Gamma }}&{{R_k} + {H_k}{P_\Gamma }H_k^{\rm{T}}} \end{array}} \right]} \right)$
$i=\left\{ 1, \cdots, 4 \right\}$.目标的存活概率为${{p}_{s, k}}=0.98$, 传感器的检测概率为${{p}_{d, k}}=0.9$.在剪切和合并过程中, 设航迹存在概率的阈值为${{T}_{r}}={{10}^{-3}}$, 高斯项权值的阈值为${{T}_{\omega }}={{10}^{-5}}$, 合并阈值为$U=4\rm{m}$, 航迹的最大值为${{M}_{\max }}=100$, 每条航迹对应高斯项个数的最大值为${{J}_{\max }}=30$. PHD滤波器新生目标的模型参数见文献[21].
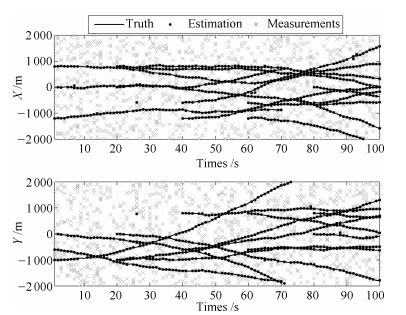
图 2给出了GM-PMM-CBMeMBer滤波器单次仿真的结果, 两个子图分别对应不同时刻X轴和Y轴的状态估计.整体来看, 所提算法可以比较准确地估计目标的状态.在某些时刻会出现虚假目标或目标跟踪丢失的情况, 但随着时间推移, 算法自身可以很快地进行修正.
本文采用OSPA (Optimal subpattern assignment)距离[24]评估算法的跟踪性能.设多目标真实状态的集合为$X=\left\{ {\mathit{\boldsymbol{x}}_{1}}, \cdots , {\mathit{\boldsymbol{x}}_{m}} \right\}$, 估计状态的集合为$\hat{X}=\left\{ {{{\hat{\mathit{\boldsymbol{x}}}}}_{1}}, \cdots, {{{\hat{\mathit{\boldsymbol{x}}}}}_{n}} \right\}$, 若$m\le n$, 则OSPA距离为
\begin{equation}\label{} \begin{array}{l} \bar d_p^{\left( c \right)}\left( {X, \hat X} \right) = \\ \quad {\left( {\frac{1}{n}\left( {\mathop {\min }\limits_{\pi \in {\Pi _n}} \sum\limits_{i = 1}^m {{d^{\left( c \right)}}{{\left( {{\mathit{\boldsymbol{x}}_i}, {{\hat {\mathit{\boldsymbol{x}}}}_{\pi \left( i \right)}}} \right)}^p} + {c^p}\left( {n - m} \right)} } \right)} \right)^{\frac{1}{p}}} \end{array} \end{equation}
(62) 其中, ${{d}^{\left( c \right)}}\left( {\mathit{\boldsymbol{x}}_{i}}, {{{\hat{\mathit{\boldsymbol{x}}}}}_{\pi \left( i \right)}} \right)=\min \left( c, \left\| \mathit{\boldsymbol{x}}-\hat{\mathit{\boldsymbol{x}}} \right\| \right)$, ${{\Pi }_{n}}$表示$\left\{ 1, \cdots, n \right\}$的所有排列集合.若$m>n$, 则$\bar d_p^{\left( c \right)}\left( {X, \hat X} \right) = \bar d_p^{\left( c \right)}\left( {\hat X, X} \right)$.令距离阶次$p=1$, 截断系数$c=20\rm {m}$.
本例做了500次蒙特卡洛(Monte carlo, MC)仿真实验, 分析结果如下:
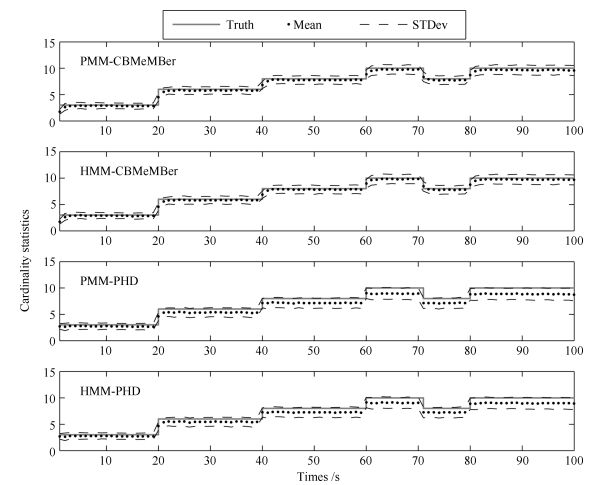
1) 图 3为不同算法对目标数估计的均值和标准差.可以看出, 在PMM或HMM框架下, CBMeMBer滤波器对目标数的估计是无偏的, PHD滤波器随着目标数的增加, 会出现欠估计的情况.说明本文所提算法对目标数的估计优于PHD滤波器[21].相比不同框架下的CBMeMBer滤波器和PHD滤波器, 它们对目标数估计的统计特性非常接近.
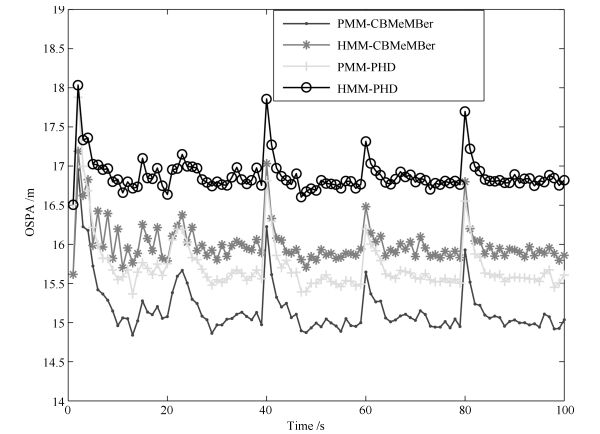
2) 图 4为不同算法对应的OSPA距离.可以看出, CBMeMBer滤波器在PMM和HMM框架下的OSPA距离评价指标均优于PHD滤波器. CBMeMBer滤波器和PHD滤波器在PMM框架下的OSPA距离评价指标优于HMM框架下相应的OSPA距离评价指标.
3) 表 1为不同杂波环境下4种算法的性能比较.不同杂波环境下, CBMeMBer滤波器和PHD滤波器在PMM框架下的OSPA距离评价指标优于HMM框架下的OSPA距离评价指标, 但单步运行时间的均值会变大.由于GM-CBMeMBer滤波器是将每个目标的密度分别用GM表示, 而GM-PHD滤波器是将多目标密度的强度整体用GM表示.因此, 它们的高斯项个数不同, 比较运行时间也就没有意义.但从表 1可以看出, 相比GM-PMM-PHD滤波器, GM-PMM-CBMeMBer滤波器以更小的时间代价可以得到更优的OSPA距离评价指标.
表 1 不同杂波环境下的性能比较Table 1 Tracking performance verses clutter's number$\lambda $ 0 5 10 20 PMM-CBMeMBer OSPA(m) 15.173 15.196 15.202 15.390 时间(s) 0.0203 0.0221 0.0237 0.0244 HMM-CBMeMBer OSPA(m) 16.010 16.065 16.086 16.234 时间(s) 0.0179 0.0194 0.0211 0.0228 PMM-PHD OSPA(m) 15.631 15.654 15.698 15.739 时间(s) 0.0203 0.0280 0.0350 0.0476 HMM-PHD OSPA(m) 16.806 16.817 16.855 16.889 时间(s) 0.0084 0.0118 0.0132 0.0191 4. 结论
本文提出一种在PMM框架下的CBMeMBer滤波器, 并给出了它在线性高斯PMM条件下的GM实现.该算法放宽了HMM隐含的马尔科夫假设和独立性假设限制.在仿真实验中, 采用一种满足HMM局部物理特性的PMM, 将本文所提算法与文献[21]所提的GM-PMM-PHD滤波器进行比较, 仿真结果表明本文所提算法的跟踪性能优于GM-PMM-PHD滤波器.本文考虑的是PMM在线性高斯条件下的多目标跟踪问题, 而非线性条件下的多目标跟踪问题有待进一步研究.
-
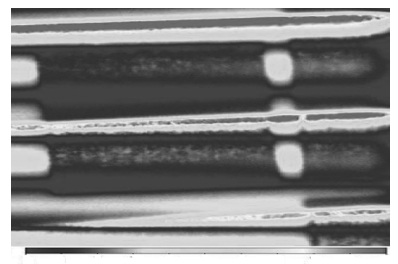
图 14 NIR图像在预热阶段中温区间
Fig. 14 Medium temperature range of NIR images at pre-heating phases
表 1 3D打印技术的分类
Table 1 The classification of 3D printing technology
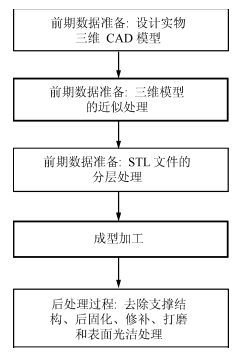
成型方式(材料) 成型方式名称 3D打印成型技术 熔挤压(热塑性塑料) 熔融沉积成型技术 FDM熔融沉积成型技术 层压(纸、金属膜、塑料薄膜) 分层直接成型技术 LOM分层实体制造技术 粉末粘接(石膏、陶瓷粉末) 粉末粘接成型技术 3DP三维打印粘接成型技术 光聚合(液态光敏树脂) 光聚合成型技术 SLA立体光固化技术,DLP数字光处理技术PloyJet多头喷射技术 粉末烧结/熔融(金属、合金、热塑性、陶瓷等粉末) 激光粉末成型技术 SLS选择性激光烧结技术,DMLS直接金属激光烧结技术SLM选择性激光熔化成型技术,EBM电子束熔炼技术  下载: 导出CSV
下载: 导出CSV
表 2 参数V, N, ΔP1和喷嘴孔直径d0稳定喷射关系
Table 2 The stable jetting relations of the parameters V, N, ΔP1 and diameter d0 of the nozzle orifice
实例 流速V (mm/s) 功率N (kW) 压力ΔP1 (mbar) 直径知d0 (mm) 1 30 2.13 170 217 2 34 2.13 180 225 3 28 2.07 180 194 4 28 2.07 190 193 5 32 1.99 300 181 6 26 1.96 320 169 7 26 1.96 360 149 8 30 1.96 290 178
下载: 导出CSV
表 3 已存在的混合路径算法和所提出算法的路径比较
Table 3 Comparison of the proposed method with the existing hybrid method
下载: 导出CSV
表 4 振镜校正实验数据
Table 4 Vibrating mirror calibration experiment data
试验次数 1 2 3 4 5 6 7 第一次X 149.8 0 149.7 149.8 0 149.6 150.3 第一次Y 149.7 150 149.8 0 0 0 150.2 第二次X 150 0 150.2 150.1 0 150.2 149.7 第二次Y 150.2 149.9 150.1 0 0 0 149.8
下载: 导出CSV
-
[1] Butter M, Leis M, Sandtke M, McLean M, Lincoln J, Wilson A. The leverage effect of photonics technologies on the European economy:the European perspective[Online], available:http://www.ec.europa.eu/digital-single-market/news/leverage-effect-photonics-technologies-european-economy-european-perspective, December 29, 2015 [2] Armstrong R, Gregory A. Layers of complexity. The Medical Journal of Australia, 2012, 197(6):311-257 doi: 10.5694/mja12.c0917 [3] 任宇.中国与主要发达国家智能制造的比较研究.工业经济论坛, 2015, (2):68-76 http://www.cnki.com.cn/Article/CJFDTOTAL-IDER201502008.htmRen Yu. A comparative study of intelligent manufacturing between China and the main developed countries. Industrial Economy Review, 2015, (2):68-76 http://www.cnki.com.cn/Article/CJFDTOTAL-IDER201502008.htm [4] Skubic R L, Comb J W, Grudem J K, Swanson W J, Batchelder J S, Brose SM. Viscosity Pump for Extrusion-based Deposition Systems, U.S. Patent 7891964, February 2011 [5] Crump S S. Apparatus and Method for Creating Three-dimensional Objects, U.S. Patent 5121329, June 1992 [6] Valkenaers H, Vogeler F, Ferraris E, Voet A, Kruth J P. A novel approach to additive manufacturing:screw extrusion 3D-printing. In:Proceedings of the 10th International Conference on Multi-Material Micro Manufacture. San Sebastián, Spain:Research Publishing, 2013. 235-238 [7] Batchelder J S, Swanson W J, Johnson K C. Additive Manufacturing Process with Dynamic Heat Flow Control, U.S. Patent 20150097307, April 2013 [8] de Castro Silveira Z, de Freitas M S, Inforçatti Neto P, Noritomi P Y, da Silva J V L. Design development and functional validation of an interchangeable head based on mini screw extrusion applied in an experimental desktop 3-D printer. International Journal of Rapid Manufacturing, 2014, 4(1):49-65 doi: 10.1504/IJRAPIDM.2014.062037 [9] 彭勇刚, 韦巍.基于多段温度控制的熔丝沉积成型3D打印喷头及温控方法, CN Patent 103240883A, 2013年8月Peng Yong-Gang, Wei Wei. Based on Temperature Control of Fuse Deposit Forming 3d Print Heads and the Temperature Control Method, CN Patent 103240883A, August 2013 [10] Astrum K J, Hagglund T. Automatic Tuning of PID Controllers. Washington:Instrumentation Systems, and Automation Society, 1988. 75-85 http://cn.bing.com/academic/profile?id=646286238&encoded=0&v=paper_preview&mkt=zh-cn [11] 莫红, 王飞跃, 赵亮.一一映射下区间二型模糊集合的语言动力学轨迹.模式识别与人工智能, 2010, 23(2):144-147 http://www.cnki.com.cn/Article/CJFDTOTAL-MSSB201002002.htmMo Hong, Wang Fei-Yue, Zhao Liang. LDS trajectories under one-to-one mappings in interval type-2 fuzzy sets. Pattern Recognition and Artificial Intelligence, 2010, 23(2):144-147 http://www.cnki.com.cn/Article/CJFDTOTAL-MSSB201002002.htm [12] 王柏通. 3D打印喷头的温度分析及控制策略研究[硕士学位论文], 湖南师范大学, 中国, 2014 http://cdmd.cnki.com.cn/article/cdmd-10542-1015515272.htmWang Bo-Tong. A Temperature Analysis & Control Strategy on 3D Printing Nozzle[Master dissertation], Hunan Normal University, China, 2014 http://cdmd.cnki.com.cn/article/cdmd-10542-1015515272.htm [13] Vega E J, Cabezas M G, Mu noz-Sánchez B N, Montanero J M, Ga nán-Calvo A M. A novel technique to produce metallic microdrops for additive manufacturing. The International Journal of Advanced Manufacturing Technology, 2014, 70(5-8):1395-1402 doi: 10.1007/s00170-013-5357-3 [14] Swanson W J, Popa M A, Turley P W, Priedeman W R, Hopkins P E Jr, Brose S, Kimm D I, Pollard D L, Hahn A M. Filament Cassette and Loading System, U.S. Patent 6776602, August 2004 [15] Labossiere J E, Eshelman M E. Rapid Prototyping System with Controlled Material Feedstock, U.S. Patent 7384255, June 2008 [16] 闫东升, 曹志清, 孔改荣. FDM工艺送丝驱动机构的摩擦驱动力分析.北京化工大学学报, 2003, 30(3):71-73 http://d.wanfangdata.com.cn/Periodical/bjhgdxxb200303018Yan Dong-Sheng, Cao Zhi-Qing, Kong Gai-Rong. Analysis of the driving force by friction in a driving structure of FDM. Journal of Beijing University of Chemical Technology, 2003, 30(3):71-73 http://d.wanfangdata.com.cn/Periodical/bjhgdxxb200303018 [17] 汪甜田. FDM送丝机构的研究与设计[硕士学位论文], 华中科技大学, 中国, 2007 http://cdmd.cnki.com.cn/article/cdmd-10487-2009037631.htmWang Tian-Tian. The Research & Design on the Feeder in FDM[Master dissertation], Huazhong University of Science & Technology, China, 2007 http://cdmd.cnki.com.cn/article/cdmd-10487-2009037631.htm [18] Ding D H, Pan Z X, Cuiuri D, Li H J. Wire-feed additive manufacturing of metal components:technologies, developments and future interests. The International Journal of Advanced Manufacturing Technology, 2015, 81(1):465-481 http://cn.bing.com/academic/profile?id=1675559242&encoded=0&v=paper_preview&mkt=zh-cn [19] Li Y F, Lau C C. Development of fuzzy algorithms for servo systems. IEEE Control Systems Magazine, 1989, 9(3):65-72 doi: 10.1109/37.24814 [20] Lin F J, Chiu S L. Adaptive fuzzy sliding-mode control for PM synchronous servo motor drives. IEE Proceedings——Control Theory and Applications, 1998, 145(1):63-72 doi: 10.1049/ip-cta:19981683 [21] Wai R J. Adaptive sliding-mode control for induction servomotor drive. IEE Proceedings——Electric Power Applications, 2000, 147(6):553-562 doi: 10.1049/ip-epa:20000628 [22] Lu X S, Lee Y, Yang S F, Hao Y, Evans J R G, Parini C G. Fine lattice structures fabricated by extrusion freeforming:process variables. Journal of Materials Processing Technology, 2009, 209(10):4654-4661 doi: 10.1016/j.jmatprotec.2008.11.039 [23] Sunil V B, Pande S S. Automatic recognition of features from freeform surface CAD models. Computer-Aided Design, 2008, 40(4):502-517 doi: 10.1016/j.cad.2008.01.006 [24] Onuh S O, Hon K K B. Application of the Taguchi method and new hatch styles for quality improvement in stereolithography. Proceedings of the Institution of Mechanical Engineers, Part B:Journal of Engineering Manufacture, 1998, 212(6):461-472 doi: 10.1243/0954405981515761 [25] Jin Y A, He Y, Xue G H, Fu J Z. A parallel-based path generation method for fused deposition modeling. The International Journal of Advanced Manufacturing Technology, 2015, 77(5-8):927-937 doi: 10.1007/s00170-014-6530-z [26] Wasser T, Jayal A D, Pistor C. Implementation and evaluation of novel buildstyles in fused deposition modeling (FDM). Strain, 1999, 5(6):425-430 [27] Kim D S. Polygon offsetting using a Voronoi diagram and two stacks. Computer-Aided Design, 1998, 30(14):1069-1076 doi: 10.1016/S0010-4485(98)00063-3 [28] Bertoldi M, Yardimci M A, Pistor C M, Gücceri S I. Domain decomposition and space filling curves in toolpath planning and generation. In:Proceedings of the Solid Freeform Fabrication Symposium. Texas, USA:Texas Academic Press, 1998. 267-274 [29] Shi Y, Zhang W, Cheng Y, Huang S. Compound scan mode developed from subarea and contour scan mode for selective laser sintering. International Journal of Machine Tools and Manufacture, 2007, 47(6):873-883 doi: 10.1016/j.ijmachtools.2006.08.013 [30] Yang Y, Fuh J Y H, Loh H T. An efficient scanning pattern for layered manufacturing processes. In:Proceedings of the 2001 IEEE International Conference on Robotics and Automation. Seoul, South Korea:IEEE, 2001. 1340-1345 [31] Ding D H, Pan Z X, Cuiuri D, Li H J. A tool-path generation strategy for wire and arc additive manufacturing. The International Journal of Advanced Manufacturing Technology, 2014, 73(1-4):173-183 doi: 10.1007/s00170-014-5808-5 [32] Batchelder J S, Crump S S. Method for Rapid Prototyping of Solid Models, U.S. Patent 5866058, February 1999 [33] Swanson W J, Turley P W, Leavitt P J, Karwoski P J, Labossiere J E, Skubic R L. High Temperature Modeling Apparatus, U.S. Patent 6722872, April 2004 [34] Costa S, Duarte F, Covas J A. Using MATLAB to Compute Heat Transfer in Free Form Extrusion. Croatia:INTECH Open Access Publisher, 2011. 82-93 http://cn.bing.com/academic/profile?id=2096277459&encoded=0&v=paper_preview&mkt=zh-cn [35] Ji L B, Zhou T R. Finite element simulation of temperature field in fused deposition modeling. Advanced Materials Research, 2010, 97-101:2585-2588 doi: 10.4028/www.scientific.net/AMR.97-101 [36] Zhang Y, Chou Y K. Three-dimensional finite element analysis simulations of the fused deposition modelling process. Proceedings of the Institution of Mechanical Engineers, Part B:Journal of Engineering Manufacture, 2006, 220(10):1663-1671 doi: 10.1243/09544054JEM572 [37] Skubic R L, Comb J W. Adjustable Platform Assembly for Digital Manufacturing System, U.S. Patent 8153183, April 2012 [38] Cavill B R, Schulz R A. Print Head Motor Control System with Automatic Drive Parameter Calculations, U.S. Patent 4775945, October 1988 [39] Hercog D, Curkovič M, Jezernik K. DSP based rapid control prototyping systems for engineering education and research. In:Proceedings of Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications. Munich, Germany:IEEE, 2006. 2292-2297 [40] Ricci F, Le-Huy H. An FPGA-based rapid prototyping platform for variable-speed drives. In:Proceedings of the 28th Annual Conference on the Industrial Electronics Society. Sevilla, Spain:IEEE, 2002. 1156-1161 [41] 魏大忠, 徐健, 吴任东, 张人佶.基于McT运动控制器的快速成型机数控系统研究.组合机床与自动化加工技术, 2003, (4):35-37 http://www.cnki.com.cn/Article/CJFDTOTAL-ZJYC200308011.htmWei Da-Zhong, Xu Jian, Wu Ren-Dong, Zhang Ren-Ji. Based on the fast molding machine CNC system of McT motion controller. Modular Machine Tool & Automatic Manufacturing Technique, 2003, (4):35-37 http://www.cnki.com.cn/Article/CJFDTOTAL-ZJYC200308011.htm [42] Swartz J, Barkan E, Harrison S A. Portable Laser Scanning System and Scanning Methods, U.S. Patent 4387297, January 1983 [43] Roorda A, Romero-Borja F, Donnelly W J III, Queener H, Hebert T J, Campbell M C W. Adaptive optics scanning laser ophthalmoscopy. Optics Express, 2002, 10(9):405-412 doi: 10.1364/OE.10.000405 [44] 杨志卿, 吴登喜, 郑永超.二维光学扫描中扫描角度非线性研究.激光技术, 2004, 3(28):263-265 http://www.cnki.com.cn/Article/CJFDTOTAL-JGJS200403011.htmYang Zhi-Qing, Wu Deng-Xi, Zheng Yong-Chao. Study of angular non-linearity in 2-D optical scanning. Laser Technology, 2004, 3(28):263-265 http://www.cnki.com.cn/Article/CJFDTOTAL-JGJS200403011.htm [45] Stafne M A, Mitchell L D, West R L. Positional calibration of galvanometric scanners used in laser Doppler vibrometers. Measurement, 2000, 28(1):47-59 doi: 10.1016/S0263-2241(00)00006-3 [46] Xie J, Huang S H, Duan Z C. Positional correction algorithm of a laser galvanometric scanning system used in rapid prototyping manufacturing. The International Journal of Advanced Manufacturing Technology, 2005, 26(11-12):1348-1352 doi: 10.1007/s00170-004-2200-x [47] Ehrmann J S. Optics for vector scanning. In:Proceedings of the the SPIE, Beam deflection and scanning technologies. Boston, American:SPIE, 1991. 245-256 [48] 文世峰.选择性激光烧结快速成形中振镜扫描与控制系统的研究[博士学位论文], 华中科技大学, 中国, 2010 http://cdmd.cnki.com.cn/article/cdmd-10487-2010184436.htmWen Shi-Feng. Study of Galvanometric Scan and Control System in Selective Laser Sintering[Ph.D. dissertation], Huazhong University of Science & Technology, China, 2010 http://cdmd.cnki.com.cn/article/cdmd-10487-2010184436.htm [49] Jablonowski D P, Raamot J. Beam deflection at high accuracy and precision. In:Proceedings of SPIE 0084, Laser Scanning Components and Techniques:Design Considerations. San Diego:SPIE, 1977. 69-77 [50] 李广亚, 王玉增, 韩婧茹, 刘双源.机械零件RP中振镜系统校正的几何算法.机床与液压, 2014, 42(19):28-30 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201419008.htmLi Guang-Ya, Wang Yu-Zeng, Han Jing-Ru, Liu Shuang-Yuan. Geometry algorithm of galvanometer system correction for rapid prototyping of machine parts. Machine Tool & Hydraulics, 2014, 42(19):28-30 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201419008.htm [51] Ngoi B K A, Venkatakrishnan K, Tan B, Noël N, Shen Z W, Chin C S. Two-axis-scanning laser Doppler vibrometer for microstructure. Optics Communications, 2000, 182(1-3):175-185 doi: 10.1016/S0030-4018(00)00762-8 [52] Spence S T, Tarnoff H L. Apparatus and Method for Correcting for Drift in Production of Objects by Stereolithography, U.S. Patent 5059021, October 1991 [53] Spence S T. Apparatus and Method for Profiling a Beam, U.S. Patent 5267013, November 1993 [54] Spence S T, Almquist T A, Tarnoff H L, Juran W. Apparatus and Method for Calibrating and Normalizing a Stereolithographic Apparatus, U.S. Patent 5495328, February 1996 [55] 莫健华, 冯昕, 潘翔.光固化成形系统激光光斑位置漂移校正研究.激光杂志, 2007, 28(4):77-78 http://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ200704041.htmMo Jian-Hua, Feng Xin, Pan Xiang. A research into drift correction of laser spot position in SLA. Laser Journal, 2007, 28(4):77-78 http://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ200704041.htm [56] 祝萍.光固化成形系统光斑检测与坐标漂移校正研究[硕士学位论文], 华中科技大学, 中国, 2006 http://cdmd.cnki.com.cn/article/cdmd-10487-2008022376.htmZhu Ping. A Research into the Measurement of Laser Beam Parameters and Correction of Scanning System Drift in Stereolithography Apparatus[Master dissertation], Huazhong University of Science & Technology, China, 2006 http://cdmd.cnki.com.cn/article/cdmd-10487-2008022376.htm [57] Berumen S, Bechmann F, Lindner S, Kruth J P, Craeghs T. Quality control of laser-and powder bed-based additive manufacturing (AM) technologies. Physics Procedia, 2010, 5(8):617-622 http://cn.bing.com/academic/profile?id=1963661623&encoded=0&v=paper_preview&mkt=zh-cn [58] 王青岗, 颜永年.光固化向量扫描过程中的能量控制.清华大学学报(自然科学版), 2006, 45(11):1456-1459 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB200511004.htmWang Qing-Gang, Yan Yong-Nian. Energy control in vector scanning of stereolithography. Journal of Tsinghua University (Science and Technology), 2006, 45(11):1456-1459 http://www.cnki.com.cn/Article/CJFDTOTAL-QHXB200511004.htm [59] Abderyim P, Osama H, Tadahiro F, Norishige C. Accurate and efficient drawing method for laser projection. The Journal of the Society for Art and Science, 2008, 7(4):155-169 doi: 10.3756/artsci.7.155 [60] Jacobs P F. Stereolithography and other RP & M Technologies:from Rapid Prototyping to Rapid Tooling. Michigan:American Society of Mechanical Engineers, 1995. 35-42 http://cn.bing.com/academic/profile?id=1494804381&encoded=0&v=paper_preview&mkt=zh-cn [61] Kawasaki A, Goto M, Yashiro H, Ozaki H. An array-type PSD (position-sensitive detector) for light pattern measurement. Sensors and Actuators A:Physical, 1990, 22(1-3):529-533 doi: 10.1016/0924-4247(89)80030-5 [62] Farnworth W M. Layer Thickness Control for Stereolithography Utilizing Variable Liquid Elevation and Laser Focal Length, U.S. Patent 6955783, October 2005 [63] Almquist T A, Modrek B, Jacobs P F, Lewis C W, Lewis M A, Liran A, Cohen A L, Smalley D R. Method of and Apparatus for Measuring and Controlling Fluid Level in Stereolithography, U.S. Patent 5258146, November 1993 [64] Yamamoto M, Itoh K. Three-dimensional Structure Forming Apparatus Provided with a Liquid-level Control System for a Main Resin Tank, U.S. Patent 5248249, September 1993 [65] Stonesmith M, Hunter D, Wahlstrom B, Stout L, Reynolds G. Rapid Prototyping and Manufacturing System and Method, U.S. Patent 658105527 B2, September 2005 [66] Renap K, Kruth J P. Recoating issues in stereolithography. Rapid Prototyping Journal, 1995, 1(3):4-16 doi: 10.1108/13552549510094223 [67] Almquist T A, Hull C W, Modrek B, Jacobs P F, Lewis C W, Cohen A L. Recoating of Stereolithographic Layers, U.S. Patent 5651934, July 1997 [68] Almquist T A, Hull C W, Modrek B, Jacobs P F, Lewis C W, Cohen A L. Recoating of Stereolithographic Layers, U.S. Patent 6048487, April 2000 [69] 范准峰.光固化快速成形涂层技术研究[硕士学位论文], 华中科技大学, 中国, 2006 http://cdmd.cnki.com.cn/article/cdmd-10487-2008022236.htmFan Zhun-Feng. Research on Recoating Technology of Stereolithography Rapid Prototyping[Master dissertation], Huazhong University of Science & Technology, China, 2006 http://cdmd.cnki.com.cn/article/cdmd-10487-2008022236.htm [70] Ang B Y, Chua C K, Du Z H. Study of trapped material in rapid prototyping parts. The International Journal of Advanced Manufacturing Technology, 2000, 16(2):120-130 doi: 10.1007/s001700050017 [71] Almquist T A, Hull C W, Thayer J S, Leyden R N, Jacobs P F, Smalley D R. Rapid Recoating of Three-dimensional Objects Formed on a Cross-sectional Basis, U.S. Patent 5902537, May 1999 [72] Zhou C, Chen Y, Yang Z G, Khoshnevis B. Digital material fabrication using mask-image-projection-based stereolithography. Rapid Prototyping Journal, 2013, 19(3):153-165 doi: 10.1108/13552541311312148 [73] 赵万华, 李涤尘, 柯映林.光固化快速成形中树脂涂层技术研究.中国机械工程, 1999, 10(12):1333-1345 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX199912004.htmZhao Wan-Hua, Li Di-Chen, Ke Ying-Lin. Research on resin recoating technology of stereolithography rapid prototyping. China Mechanical Engineering, 1999, 10(12):1333-1345 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX199912004.htm [74] Gilio M, Kruth J P, Vanherck P. High-speed curtain recoating for stereolithography. In:Proceedings of the 12th Annual Solid Freeform Fabrication Symposium. Texas, USA:Texas Academic Press, 2001. 46-54 [75] Yan Y N, Li S J, Zhang R J, Lin F, Wu R D, Lu Q D, Lu Q P, Xiong Z, Wang X H. Rapid prototyping and manufacturing technology:principle, representative technics, applications, and development trends. Tsinghua Science & Technology, 2009, 14(1):1-12 http://cn.bing.com/academic/profile?id=2161302514&encoded=0&v=paper_preview&mkt=zh-cn [76] Onuh S O, Hon K K B. Optimising build parameters for improved surface finish in stereolithography. International Journal of Machine Tools and Manufacture, 1998, 38(4):329-342 doi: 10.1016/S0890-6955(97)00068-0 [77] 习俊通, 周满元, 严隽琪.基于STEP的非均匀自适应分层方法.计算机集成制造系统报, 2004, 10(2):235-239 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ200402022.htmXi Jun-Tong, Zhou Man-Yuan, Yan Jun-Qi. STEP-based approach of adaptive slicing with non-uniform cusp heights for rapid prototyping. Computer Integrated Manufacturing Systems, 2004, 10(2):235-239 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ200402022.htm [78] Horton L, Gargiulo E, Keefe M. An experimental study of the parameters affecting curl in parts created using stereolithography. In:Proceedings of the Solid Freeform Fabrication Symposium. Texas, USA:Texas Academic Press, 1993. 178-185 [79] Corcione C E, Greco A, Maffezzoli A. Photopolymerization kinetics of an epoxy-based resin for stereolithography. Journal of applied polymer science, 2004, 92(6):3484-3491 doi: 10.1002/(ISSN)1097-4628 [80] Jacobs P F. Rapid Prototyping and Manufacturing:Fundamentals of Stereolithography. Dearborn, MI:SME, 1992. 135-141 http://cn.bing.com/academic/profile?id=1523127134&encoded=0&v=paper_preview&mkt=zh-cn [81] 马雷, 李涤尘, 段玉岗, 卢秉恒.基于二次曝光原理的光固化快速成型工艺研究.西安交通大学学报, 2001, 35(1):57-60 http://www.cnki.com.cn/Article/CJFDTOTAL-XAJT200101013.htmMa Lei, Li Di-Chen, Duan Yu-Gang, Lu Bing-Heng. Stereolithography process based on double exposal method. Journal of Xi'an Jiaotong University, 2001, 35(1):57-60 http://www.cnki.com.cn/Article/CJFDTOTAL-XAJT200101013.htm [82] 袁慧羚, 周天瑞.光固化快速成型工艺的精度研究.南方金属, 2009, (2):24-27 http://www.cnki.com.cn/Article/CJFDTOTAL-NFGT200902008.htmYuan Hui-Ling, Zhou Tian-Rui. A study of the fabrication precision of rapid prototyping by stereo lithography. Southern Metals, 2009, (2):24-27 http://www.cnki.com.cn/Article/CJFDTOTAL-NFGT200902008.htm [83] Deckard C R. Method and Apparatus for Producing Parts by Selective Sintering, U.S. Patent 4863538, September 1989 [84] Hagiwara M, Sassa M. Powder Rapid Prototyping Apparatus and Powder Rapid Prototyping Method, U.S. Patent 9061465, June 2015 [85] Nakano S, Shimizu T, Hagiwara M, Sassa M. Rapid Prototyping Model, Powder Rapid Prototyping Apparatus and Powder Rapid Prototyping Method, U.S. Patent 20150050463A1, February 2015 [86] Budding A, Vaneker T H J. New strategies for powder compaction in powder-based rapid prototyping techniques. Procedia CIRP, 2013, 6:527-532 doi: 10.1016/j.procir.2013.03.100 [87] Beaman J J, Deckard C R. Selective Laser Sintering with Assisted Powder Handling, U.S. Patent 4938816, July 1990 [88] Bourell D L, Marcus H L, Barlow J W, Beaman J J, Deckard C R. Multiple Material Systems for Selective Beam Sintering, U.S. Patent 5382308, January 1995 [89] Forderhase P F, Deckard C R, Klein J M. Apparatus and Method for Producing Parts with Multi-directional Powder Delivery, U.S. Patent 252264, October 1993 [90] Cox B D. Laser Sintering Powder Recycle System, U.S. Patent 7887316, March 2005 [91] Cox B D. Selective Laser Sintering Powder Recycle System, U.S. Patent 7887316, February 2011 [92] Cox B D. Pneumatic Powder Transport System, U.S. Patent 7296599, November 2007 [93] 晏耐生, 林峰, 齐海波, 陆伟, 张靖.电子束选区熔化技术中可控振动落粉铺粉系统的研究.中国机械工程, 2010, (19):2379-2382 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201019023.htmYan Nai-Sheng, Lin Feng, Qi Hai-Bo, Lu Wei, Zhang Jing. Study on controllable vibration powder spreading system in electron beam selective melting. China Mechanical Engineering, 2010, (19):2379-2382 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201019023.htm [94] 程军.选择性激光烧结预热温度场的数值模拟及实验研究[硕士学位论文], 华中科技大学, 中国, 2006 http://www.doc88.com/p-3176625698485.htmlCheng Jun. Numerical Simulation and Experimental Study of Temperature Field in the Preheating Process of SLS[Master dissertation], Huazhong University of Science & Technology, China, 2006 http://www.doc88.com/p-3176625698485.html [95] Grube K W, Beaman J J. Radiant Heating Apparatus for Providing Uniform Surface Temperature Useful in Selective Laser Sintering, U.S. Patent 5155321, October 1992 [96] Philippi J. Radiant Heater for Heating the Building Material in a Laser Sintering Device, U.S. Patent 8073315, December 2011 [97] Price S, Cooper K, Chou K. Evaluations of temperature measurements by near-infrared thermography in powder-based electron-beam additive manufacturing. In:Proceedings of the Solid Freeform Fabrication Symposium. Texas, USA:Texas Academic Press, 2012. 761-773 [98] Yang H J, Hwang P J, Lee S H. A study on shrinkage compensation of the SLS process by using the Taguchi method. International Journal of Machine Tools and Manufacture, 2002, 42(11):1203-1212 doi: 10.1016/S0890-6955(02)00070-6 [99] Li X F, Dong J H. Study on curve of Pe-heating temperature control in selective laser sintering. In:Proceedings of the 2009 International Symposium on Web Information Systems and Applications. Nanchang, China, 2009. 156-158 [100] 冯文仙. HRPS-ⅢA选择性激光烧结机预热系统的研究[硕士学位论文], 华中科技大学, 中国, 2003 http://www.docin.com/p-1374316010.htmlFeng Wen-Xian. Study on Preheating System of HRPS-ⅢA Selective Laser Sintering Machine[Master dissertation], Huazhong University of Science & Technology, China, 2003 http://www.docin.com/p-1374316010.html [101] 钟建伟, 史玉升, 蔡道生, 黄树槐.选择性激光烧结预热温度的自适应控制研究.机械科学与技术, 2004, 23(11):1370-1373 http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200411029.htmZhong Jian-Wei, Shi Yu-Sheng, Cai Dao-Sheng, Huang Shu-Huai. Investigation on the adaptive control preheating in selective laser sintering (SLS). Mechanical Science and Technology, 2004, 23(11):1370-1373 http://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200411029.htm [102] 董星涛, 周子裕, 卢德林, 洪亮亮, 阮耀波. SLS预热温度场温度补偿研究.机电工程, 2010, 27(5):31-34 http://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201005009.htmDong Xing-Tao, Zhou Zi-Yu, Lu De-Lin, Hong Liang-Liang, Ruan Yao-Bo. Study of temperature compensation based on preheating temperature field for SLS. Journal of Mechanical and Electrical Engineering, 2010, 27(5):31-34 http://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201005009.htm [103] Beaman J J, Barlow J W, Bourell D L, Crawford R H, Marcus H L, McAlea K P. Solid Freeform Fabrication:a New Direction in Manufacturing. US:Springer, 1997. 25-49 http://cn.bing.com/academic/profile?id=1546192049&encoded=0&v=paper_preview&mkt=zh-cn [104] Bugeda Miguel Cervera G, Lombera G. Numerical prediction of temperature and density distributions in selective laser sintering processes. Rapid Prototyping Journal, 1999, 5(1):21-26 doi: 10.1108/13552549910251846 [105] Dai K, Shaw L. Distortion minimization of laser-processed components through control of laser scanning patterns. Rapid Prototyping Journal, 2002, 8(5):270-276 doi: 10.1108/13552540210451732 [106] 王文峰.覆膜金属粉末激光烧结成型过程三维温度场数值模拟技术研究[硕士学位论文], 中北大学, 中国, 2008 http://cdmd.cnki.com.cn/article/cdmd-10110-2008142702.htmWang Wen-Feng. Study on Numerical Simulation of 3D Temperature Field During Selective Laser Sintering Polymer-coated Metal Powder[Master dissertation], North University of China, China, 2008 http://cdmd.cnki.com.cn/article/cdmd-10110-2008142702.htm [107] Wang X W. Calibration of shrinkage and beam offset in SLS process. Rapid Prototyping Journal, 1999, 5(3):129-133 doi: 10.1108/13552549910278955 [108] Williams J D, Deckard C R. Advances in modeling the effects of selected parameters on the SLS process. Rapid Prototyping Journal, 1998, 4(2):90-100 doi: 10.1108/13552549810210257 [109] Wang W L, Cheah C M, Fuh J Y H, Lu L. Influence of process parameters on stereolithography part shrinkage. Materials & Design, 1996, 17(4):205-213 http://cn.bing.com/academic/profile?id=2026812759&encoded=0&v=paper_preview&mkt=zh-cn [110] Raghunath N, Pandey P M. Improving accuracy through shrinkage modelling by using Taguchi method in selective laser sintering. International Journal of Machine Tools and Manufacture, 2007, 47(6):985-995 doi: 10.1016/j.ijmachtools.2006.07.001 [111] 魏潇然, 耿国华, 张雨禾.熔丝沉积制造中稳固低耗支撑结构生成.自动化学报, 2016, 42(1):98-106 http://www.aas.net.cn/CN/abstract/abstract18799.shtmlWei Xiao-Ran, Geng Guo-Hua, Zhang Yu-He. Steady and low consuming supporting for fused deposition modeling. Acta Automatica Sinica, 2016, 42(1):98-106 http://www.aas.net.cn/CN/abstract/abstract18799.shtml [112] 王飞跃.从社会计算到社会制造:一场即将来临的产业革命.中国科学院院刊, 2012, 27(6):658-669 http://www.cnki.com.cn/Article/CJFDTOTAL-KYYX201206001.htmWang Fei-Yue. From social computing to social manufacturing:the coming industrial revolution and new frontier in cyber-physical-social space. Bulletin of the Chinese Academy of Sciences, 2012, 27(6):658-669 http://www.cnki.com.cn/Article/CJFDTOTAL-KYYX201206001.htm 期刊类型引用(3)
1. 王国良,宋歌. 基于观测器的离散马氏跳变系统的故障估计. 南京信息工程大学学报(自然科学版). 2021(05): 517-525 .  百度学术
百度学术2. 刘江义,王春平,王暐. 基于双马尔可夫链的SMC-CBMeMBer滤波. 系统工程与电子技术. 2019(08): 1686-1691 . 百度学术3. 郎波,樊一娜. 基于深度神经网络的个性化学习行为评价方法. 计算机技术与发展. 2019(07): 6-10 . 百度学术其他类型引用(7)
-

 下载:
下载:


计量
- 文章访问数: 3762
- HTML全文浏览量: 1125
- PDF下载量: 2096
- 被引次数: 10
