

-
摘要: 针对机动多目标跟踪中的传感器控制问题, 本文提出一种基于信息论的多模型多伯努利滤波器的控制方案. 首先, 基于随机有限集(Random finite set, RFS)方法给出信息论下的传感器控制的一般方法; 其次, 本文给出多模型势均衡多目标多伯努利滤波器的序贯蒙特卡罗实现形式. 此外, 提出一种目标导向的多伯努利概率密度的粒子采样方法, 并借助该方法近似多目标概率密度, 继而利用Bhattacharyya 距离求解最终的控制方案. 典型机动多目标跟踪问题的仿真应用验证了本文传感器控制方法的有效性.Abstract: In consideration of the sensor control problem for maneuvering multi-target tracking, this paper proposes an information theory based control policy using multi-model multi-Bernoulli filter. First, a sensor control approach is presented in the information theory framework based on random finite set. Then, the sequential Monte Carlo implementation of multi-model cardinality balanced multi-target multi-Bernoulli filter is formulated. Moreover, this paper proposes a target-oriented multi-Bernoulli particle sampling method to approximate multi-target probability density. And the final control policy based on Bhattacharyya distance is solved through this sampling method. Finally, simulation results show the effectiveness of the proposed sensor control approach applied to a typical maneuvering multi-target tracking problem.
-
Key words:
- Sensor control /
- maneuvering multi-targets /
- target-oriented /
- random finite set (RFS)
-

图 4 距离方位跟踪中多目标位置估计OSPA 的比较
Fig. 4 Position OSPA distances for di®erent control strategies in range-bearing tracking

图 5 距离方位跟踪中目标个数估计的比较
Fig. 5 Cardinality statistics for di®erent control strategies in range-bearing tracking
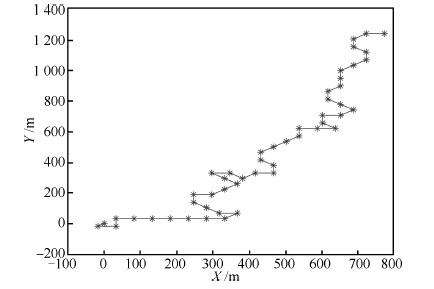
图 6 距离方位跟踪蒙特卡罗仿真中所有传感器控制位置
Fig. 6 Total position for sensor control in range-bearing tracking
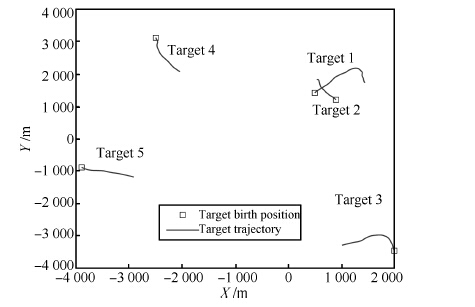
表 1 目标存活周期
Table 1 Survival periods of targets
目标1 目标2 目标3 目标4 目标5 新生时刻(s) 1 1 10 20 20 消亡时刻(s) 50 30 50 50 40  下载: 导出CSV
下载: 导出CSV
表 2 单步势估计误差均值的绝对值
Table 2 Absolute values of step-averaged cardinality error
方案一 方案二 方案三 方案四 势误差Ne 0.1319 0.1348 0.1342 0.1258
下载: 导出CSV
表 3 各方案单步平均运行时间
Table 3 Step-averaged run time for di®erent control strategies
方案一 方案二 方案三 方案四 时间(s) 1.2894 1.2988 1.3025 4.5737
下载: 导出CSV
-
[1] Mahler R P S. Advances in Statistical Multisource-Multitarget Information Fusion. Norwood, MA: Artech House, 2014. 825-860 [2] Mahler R P S, Zajic T R. Probabilistic objective functions for sensor management. In: Proceedings of the 2004 Signal Processing, Sensor Fusion, and Target Recognition XIII. Orlando, FL: SPIE, 2004. 233-244 http://cn.bing.com/academic/profile?id=1974494879&encoded=0&v=paper_preview&mkt=zh-cn [3] Castañón D A, Carin L. Stochastic control theory for sensor management. Foundations and Applications of Sensor Management. US: Springer, 2008. 7-32 http://cn.bing.com/academic/profile?id=2205606747&encoded=0&v=paper_preview&mkt=zh-cn [4] Ristic B, Vo B T. Sensor control for multi-object state-space estimation using random finite sets. Automatica, 2010, 46(11): 1812-1818 doi: 10.1016/j.automatica.2010.06.045 [5] Ristic B, Vo B N, Clark D. A note on the reward function for PHD filters with sensor control. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1521-1529 doi: 10.1109/TAES.2011.5751278 [6] Hoang H G, Vo B T. Sensor management for multi-target tracking via multi-Bernoulli filtering. Automatica, 2014, 50(4): 1135-1142 doi: 10.1016/j.automatica.2014.02.007 [7] Beard M, Vo B T, Vo B N, Arulampalam S. Sensor control for multi-target tracking using Cauchy-Schwarz divergence. In: Proceedings of the 18th International Conference on Information Fusion (Fusion). Washington, D.C.: IEEE, 2015. 937-944 http://dblp.uni-trier.de/db/conf/fusion/fusion2015 [8] Hero A O, Kreucher C M, Blatt D. Information theoretic approaches to sensor management. Foundations and Applications of Sensor Management. US: Springer, 2008. 33-57 [9] Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104 doi: 10.1109/TSP.2006.881190 [10] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245 doi: 10.1109/TAES.2005.1561884 [11] Mahler R P S. Multitarget sensor management of dispersed mobile sensors. Theory and Algorithms for Cooperative Systems, Singapore: World Scientific Publishing Co., 2004, chapter 12, 239-310 [12] Mahler R P S. Statistical Multisource-Multitarget Information Fusion. Norwood, MA: Artech House, 2007. 655-667 [13] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423 doi: 10.1109/TSP.2008.2007924 [14] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178 doi: 10.1109/TAES.2003.1261119 [15] Mahler R P S. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543 doi: 10.1109/TAES.2007.4441756 [16] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457 doi: 10.1109/TSP.2008.920469 [17] Li X R, Jilkov V P. Survey of maneuvering target tracking. Part I: dynamic models. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333-1364 doi: 10.1109/TAES.2003.1261132 [18] Duan Z S, Han C Z, Li X R. Comments on "Unbiased converted measurements for tracking". IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4): 1374-1377 doi: 10.1109/TAES.2004.1386889 期刊类型引用(1)
1. 尚婷,钱富才,刘磊,胡绍林. 一类混合不确定系统的对偶自适应控制. 应用科学学报. 2018(06): 1022-1030 .  百度学术
百度学术其他类型引用(4)
-


计量
- 文章访问数: 1884
- HTML全文浏览量: 200
- PDF下载量: 1324
- 被引次数: 5
