

Headlights Detection in Traffic Videos Based on Atmospheric Reflection-scattering Model via Reconstructing Restoration Images
-
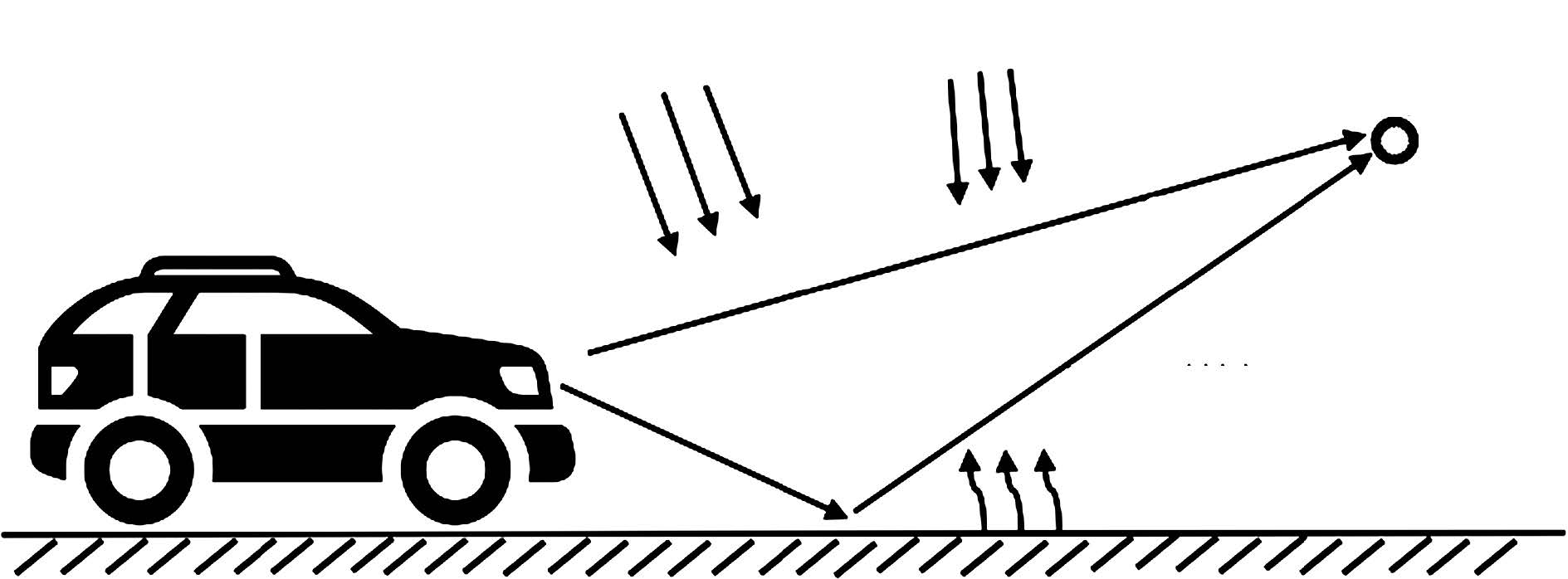
摘要: 针对夜间复杂照明环境导致车灯检测率低的问题, 提出了一种基于大气反射-散射模型的复原图像中夜间交通视频车灯检测算法. 首先根据漫反射原理抑制路面漫反射光, 在对大气散射模型做了改进之后, 估计了大气散射模型中的大气光, 再根据暗原色先验理论估计环境光, 重新定义透射率, 从而得到了只含有车灯及反射区域的复原图像.为了进一步抑制该复原图像中的强光光晕, 再次利用暗原色先验理论重新估计环境光, 得到最终的复原图像. 最后对复原图像中的所有亮斑根据四类几何特征逐步筛选, 排除视野中的非车灯. 实验结果表明, 该方法在复杂雨雪天气、高密度及高速等不同情况下, 与同类先进算法相比具有较高的检测率, 较低的漏检率和误检率.Abstract: As the detection rate of headlights under complex lighting scenes in nighttime is relatively low, a novel algorithm of headlights detection based on atmospheric reflection-scattering model has been presented. The diffuse reflection light from road surface is firstly suppressed using the diffuse reflection principle. After improving the atmosphere scattering model, the airglow is estimated. The ambient light is then estimated with the dark-channel prior theory and the transmittance is defined again. A restoration image is obtained in which only headlights and reflection regions are contained. In order to suppress the halo produced by the highlights in the restoration image, the ambient light is estimated again with the dark-channel prior theory. All spots are then checked according to their four types of geometric characteristics step by step, non-headlights are finally filtered out. Experimental results show that under complicated weather, such as rain or snow, or under high population, or high-speed, the proposed algorithm has a higher detection rate, lower miss rate and false detection rate, compared with other similar advanced algorithms.
-
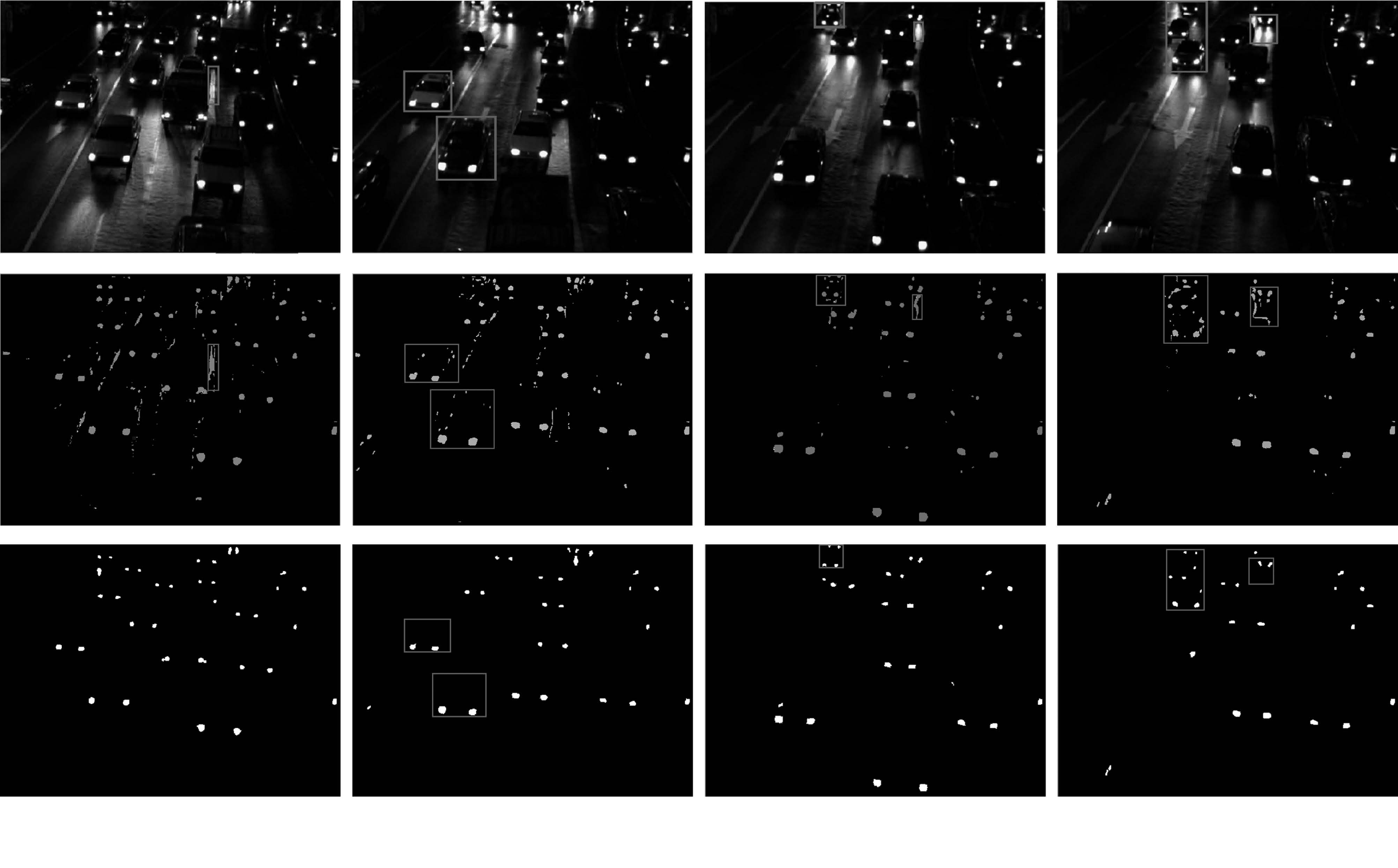
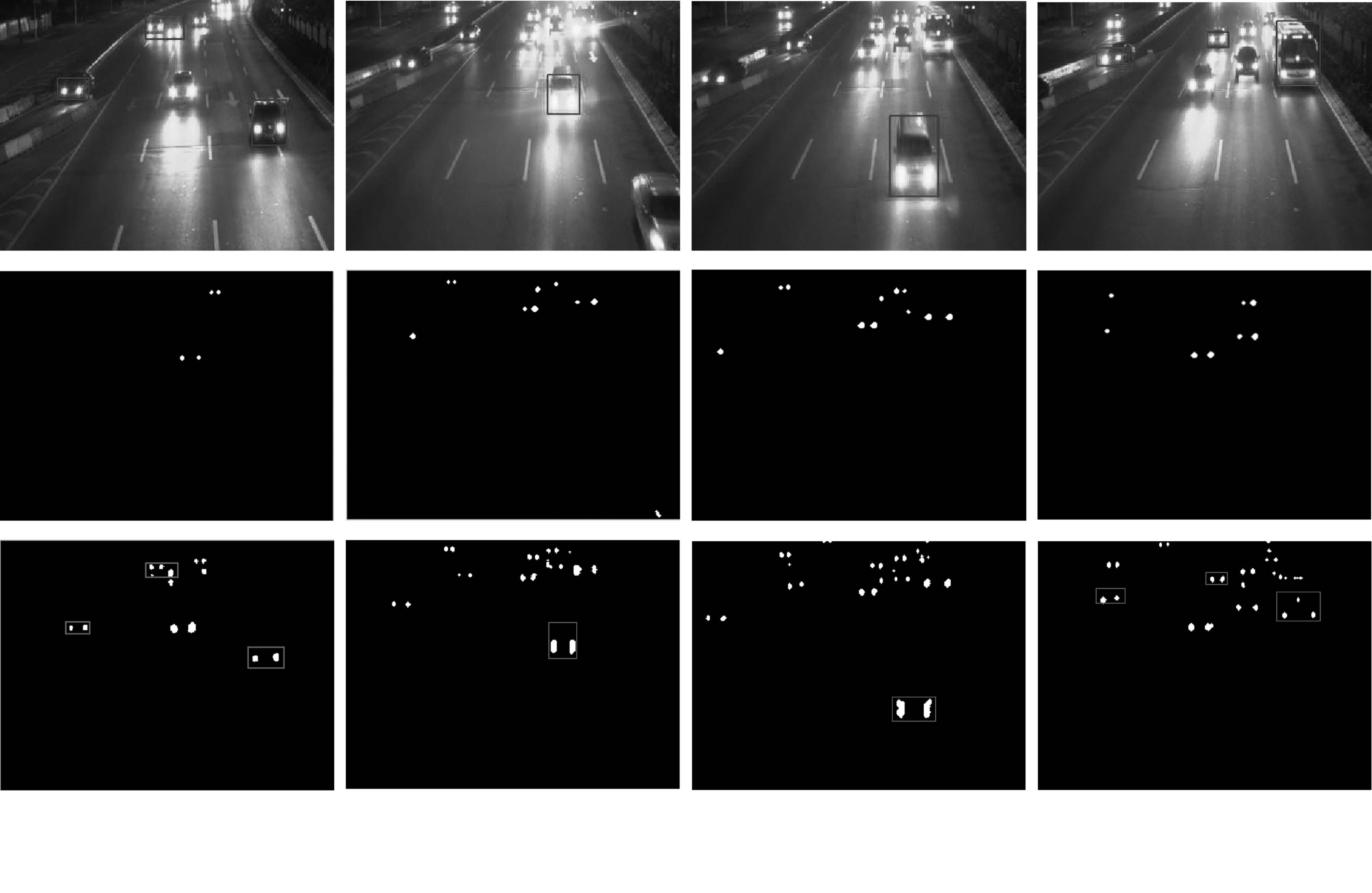
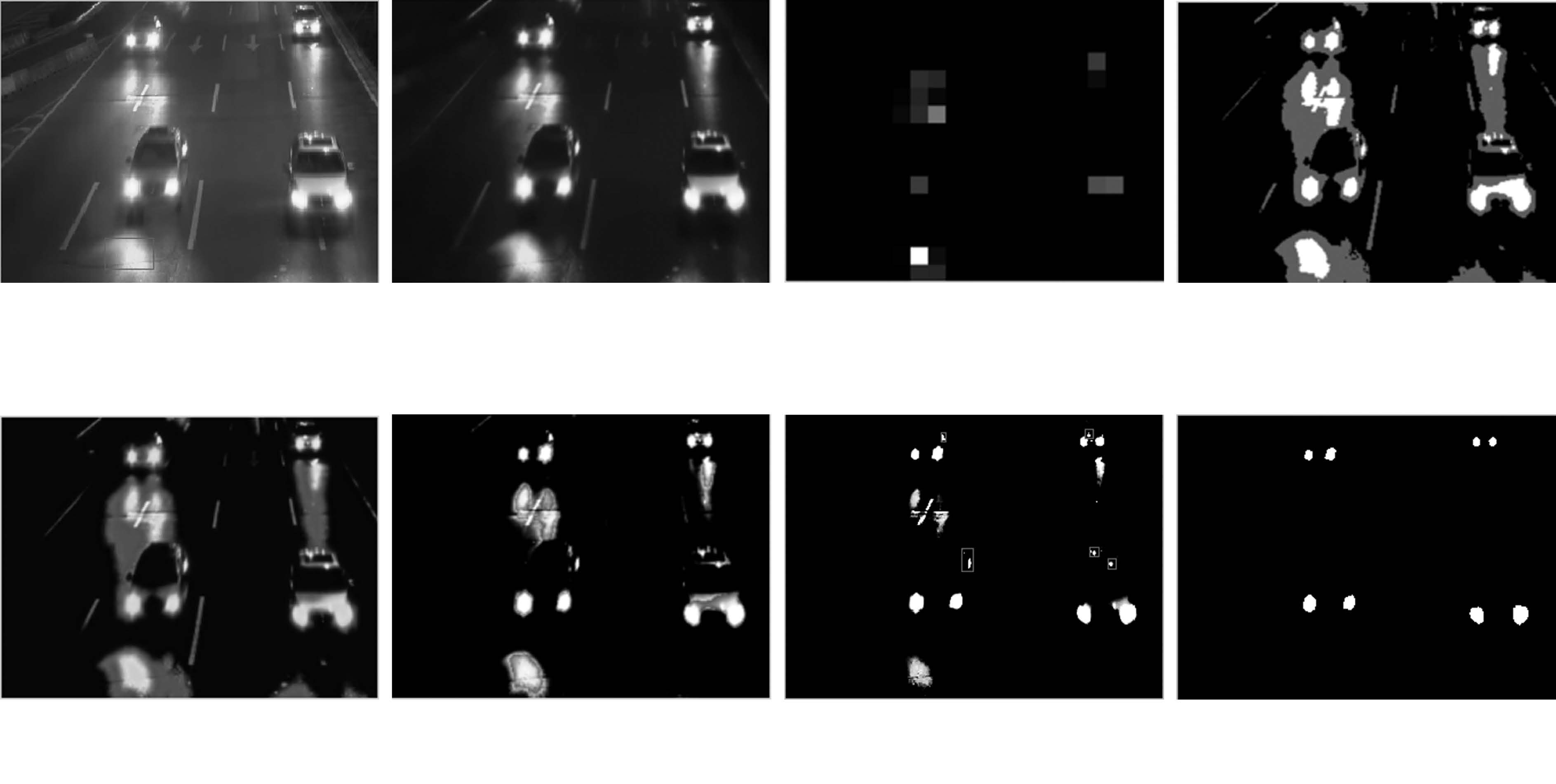
图 6 相同条件下, 同一视频特殊情况检测结果对
Fig. 6 Comparison of some special cases in the same video and conditions

图 7 相同条件下, 不同视频特殊情况检测结果对比
Fig. 7 Comparison of special cases in di®erent videos and same conditions
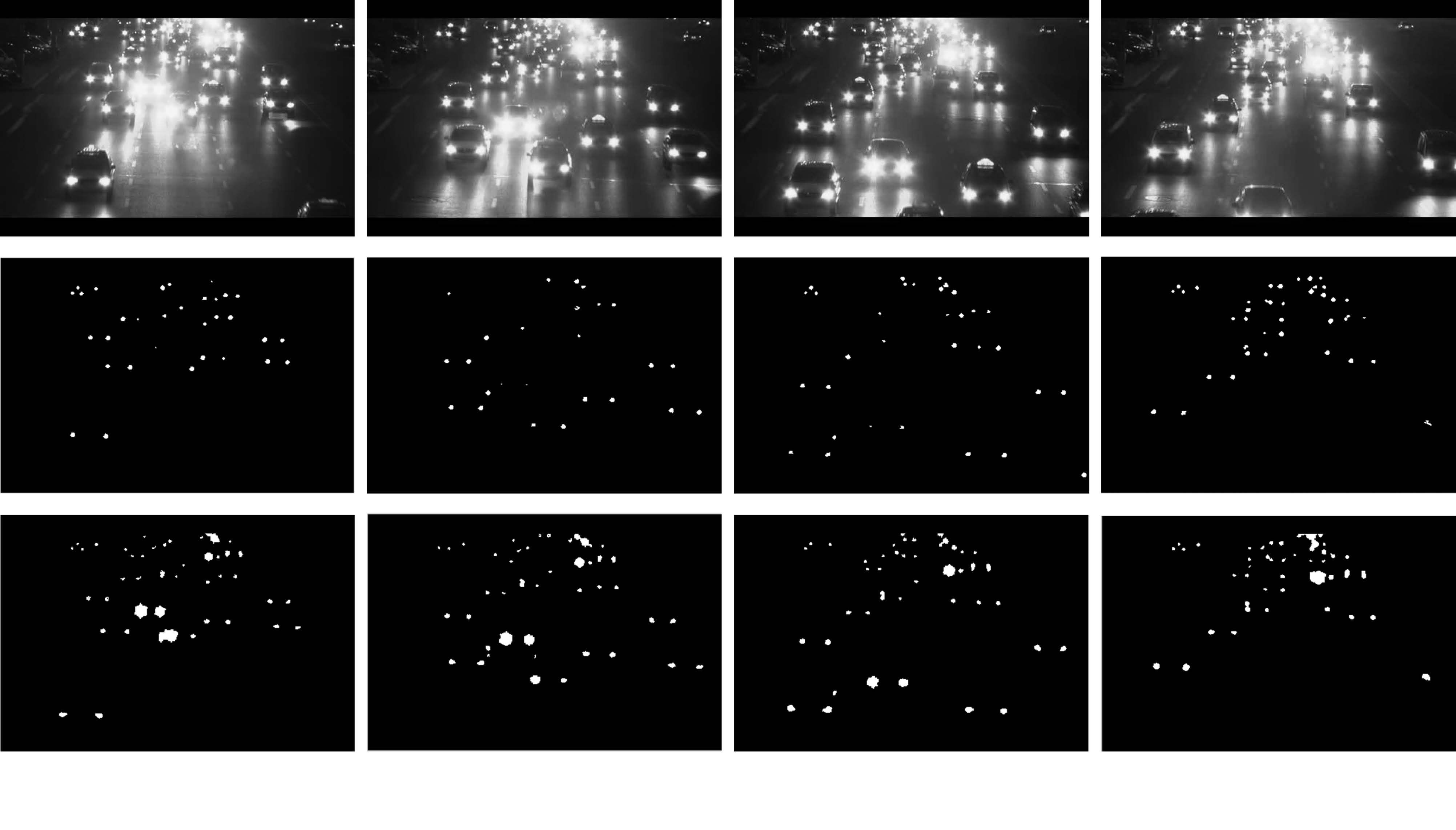



表 1 检测结果与本文检测结果对比
Table 1 Comparative results of headlights detection by our and Zhang et al.[4] algorithm
视频 实际车灯 检测车灯TP 漏检FN 误检FP 检测率E 文献[4] 44 44 0 5 89.80% 本文算法 44 44 0 2 95.65%  下载: 导出CSV
下载: 导出CSV
表 2 四种特殊情况下车灯检测结果
Table 2 Headlight detection under four special cases
图像 实际车灯 检测车灯TP 漏检FN 误检FP 检测率E (%) 文献[5] 本文 文献[5] 本文 文献[5] 本文 文献[5] 本文 高密度 (a) 23 19 22 3 1 0 0 86.36 95.65 (b) 21 15 20 6 1 0 1 71.43 90.91 (c) 17 15 15 2 2 1 0 83.33 88.24 (d) 12 10 11 2 1 0 0 83.33 91.67 雪后 (a) 14 14 14 0 0 3 1 82.35 93.33 (b) 10 10 10 0 0 2 1 83.33 90.91 (c) 12 10 10 2 2 2 1 71.43 76.92 (d) 8 6 6 2 2 2 1 60 66.67 雨后 (a) 13 10 13 3 0 0 0 76.92 100 (b) 13 11 13 2 0 0 0 84.62 100 (c) 10 9 10 1 0 0 0 90 100 (d) 11 9 11 2 0 0 1 81.82 91.67 高速 (a) 15 13 14 2 1 0 1 86.67 87.5 (b) 11 9 10 2 1 0 0 81.82 90.91 (c) 22 20 21 2 1 1 1 86.96 91.30 (d) 22 21 22 1 0 1 1 91.30 95.45
下载: 导出CSV
表 3 车灯检测结果
Table 3 Headlight detection results
视频序列 参数 序列1 序列2 序列3 序列4 序列5 序列6 序列7 序列8 序列9 实际车灯 66 92 52 52 116 212 76 144 105 文献[5] TP 64 87 51 51 114 208 75 135 99 FN+FP 2+8 5+6 1+4 1+12 2+12 4+16 1+6 9+1 6+1 E (%) 86.49 88.78 91.07 79.69 90.48 91.23 92.68 93.10 93.40 FNR (%) 2.70 5.10 1.79 1.56 1.56 1.75 1.22 6.21 5.66 FPR (%) 10.81 6.12 7.14 18.75 9.36 7.02 7.32 0.69 0.94 本文算法 TP 66 88 51 50 110 205 74 136 96 FN+FP 0+4 3+5 1+3 2+8 6+8 7+12 2+2 6+3 4+2 E (%) 94.29 91.67 94.44 83.33 93.22 91.52 94.87 93.79 94.12 FNR (%) 0 3.13 1.82 3.33 4.84 3.13 2.56 4.14 3.92 FPR (%) 5.71 5.21 5.45 13.33 6.45 5.36 2.56 2.07 1.96
下载: 导出CSV
-
[1] Zou Q, Ling H B, Luo S W, Huang Y P, Mei T. Robust nighttime vehicle detection by tracking and grouping headlights. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2838-2849 doi: 10.1109/TITS.2015.2425229 [2] Hajimolahoseini H, Soltanian-Zadeh H, Amirfattahi R. Robust vehicle tracking algorithm for nighttime videos captured by fixed cameras in highly reflective environments. IET Computer Vision, 2014, 8(6): 535-544 doi: 10.1049/iet-cvi.2013.0267 [3] Chen Y L, Wu B F, Huang H Y, Fan C J. A real-time vision system for nighttime vehicle detection and traffic surveillance. IEEE Transactions on Industrial Electronics, 2011, 58(5): 2030-2044 doi: 10.1109/TIE.2010.2055771 [4] Zhang W, Wu Q M J, Wang G H, You X G. Tracking and pairing vehicle headlight in night scenes. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 140-153 doi: 10.1109/TITS.2011.2165338 [5] Tang C M, Hussain A. Robust vehicle surveillance in night traffic videos using an Azimuthally blur technique. IEEE Transactions on Vehicular Technology, 2015, 64(10): 4432-4440 doi: 10.1109/TVT.2014.2371067 [6] 汤春明, 聂美玲, 丁腾飞, 浩欢飞, 韩旭. 基于最小特征匹配代价的夜间车辆检测和追踪. 计算机应用与软件, 2015, 32(4): 292-296 http://www.cnki.com.cn/Article/CJFDTOTAL-JYRJ201504069.htmTang Chun-Ming, Nie Mei-Ling, Ding Teng-Fei, Hao Huan-Fei, Han Xu. Nighttime vehicle detection and tracking based on minimum feature matching cost. Computer Applications and Software, 2015, 32(4): 292-296 http://www.cnki.com.cn/Article/CJFDTOTAL-JYRJ201504069.htm [7] Rubio J C, Serrat J, Lopez A M, Ponsa D. Multiple-target tracking for intelligent headlights control. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2): 594-605 doi: 10.1109/TITS.2011.2175219 [8] Jazayeri A, Cai H Y, Zheng J Y, Tuceryan M. Vehicle detection and tracking in car video based on motion model. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 583-595 doi: 10.1109/TITS.2011.2113340 [9] O'Malley R, Jones E, Glavin M. Rear-lamp vehicle detection and tracking in low-exposure color video for night conditions. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2): 453-462 doi: 10.1109/TITS.2010.2045375 [10] 齐保军. 大气散射模型在雾天图像增强和海面小目标检测中的应用 [博士学位论文], 国防科学技术大学, 中国, 2013.Qi Bao-Jun. The Application of Atmospheric Scattering Model in Image Contrast Enhancement and Surface of the Small Target Detection [Ph.D. dissertation], National University of Defense Technology, China, 2013. [11] Tan R T, Ikeuchi K. Separating reflection components of textured surfaces using a single image. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(2): 178-193 doi: 10.1109/TPAMI.2005.36 [12] Bouguer P. Traité d'Optique Sur La Gradation De La Lumiére, 1729. 93-115 [13] He K M, Sun J, Tang X O. Single image haze removal using dark channel prior. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(12): 2341-2353 doi: 10.1109/TPAMI.2010.168 [14] Sneath P H A. Numerical Taxonomy: The Principles and Practice of Numerical Classification. New York, USA: W H Freeman Co, 1973. 53-85 [15] Kosaka N, Ohashi G. Vision-based nighttime vehicle detection using CenSurE and SVM. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2599-2608 doi: 10.1109/TITS.2015.2413971 [16] 吴迪, 朱青松. 图像去雾的最新研究进展. 自动化学报, 2015, 41(2): 221-239 http://www.aas.net.cn/CN/abstract/abstract18603.shtmlWu Di, Zhu Qing-Song. The latest research progress of image dehazing. Acta Automatica Sinica, 2015, 41(2): 221-239 http://www.aas.net.cn/CN/abstract/abstract18603.shtml [17] 刘海波, 杨杰, 吴正平, 张庆年, 邓勇. 基于暗通道先验和Retinex理论的快速单幅图像去雾方法. 自动化学报, 2015, 41(7): 1264-1273 http://www.aas.net.cn/CN/abstract/abstract18700.shtmlLiu Hai-Bo, Yang Jie, Wu Zheng-Ping, Zhang Qing-Nian, Deng Yong. A fast single image dehazing method based on dark channel prior and Retinex theory. Acta Automatica Sinica, 2015, 41(7): 1264-1273 http://www.aas.net.cn/CN/abstract/abstract18700.shtml -

 下载:
下载:


计量
- 文章访问数: 2189
- HTML全文浏览量: 331
- PDF下载量: 1416
- 被引次数: 0
