

-
摘要: 针对星载合成孔径雷达 (Synthetic aperture radar, SAR) 图像信噪比低、建筑物目标几何变形大以及周围背景复杂的特点, 本文提出了一种基于能量最小化的星载SAR图像建筑物分割方法.基于星载SAR图像数据构造条件概率能量项, 推动变形曲线向建筑物目标边界演化; 在能量泛函模型中定义长度能量项以保证变形曲线的平滑; 在水平集方法获取的SAR图像初始分割结果的基础上, 以高分辨率光学遥感影像中建筑物目标的轮廓作为先验信息, 构造先验形状能量项约束曲线在第二阶段的演化, 最终实现SAR图像建筑物的分割.实验结果表明, 该方法显著提高了建筑物目标轮廓的分割精度.Abstract: To aim at the difficulties of low signal to noise ratio (SNR) of spaceborne synthetic aperture radar (SAR) image, high geometric deformation and the complex background of buildings, a variational method is proposed for segmenting the building of spaceborne SAR image based on energy minimization. The condition probability energy term is defined with the data of SAR image to drive the deformation curve to the boundary of the building. The length energy term is constructed with the length of the evolving contour to ensure the smoothness of the deformation curve. The prior shape of the building is acquired from the corresponding high-resolution optical remote sensing image and the prior shape energy term is introduced into the energy functional. On the basis of a preliminary segmentation result which is achieved by the level set method, the building segmentation is implemented eventually by imposing the constraint of the prior shape. Experimental results demonstrate that the proposed model can improve the segmentation accuracy of the building target significantly.
-
Key words:
- Spaceborne SAR images /
- building segmentation /
- energy minimization /
- prior shape
-
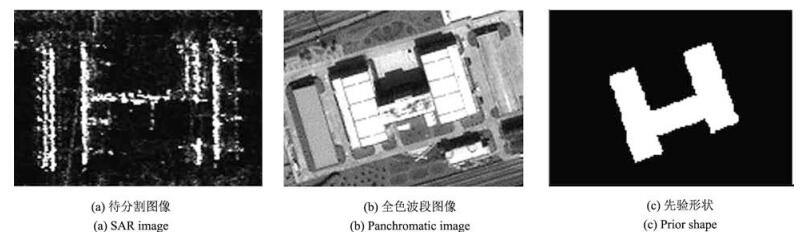
图 5 " H "状楼的SAR图像和全色波段图像及其先验形状
Fig. 5 SAR image of the building with " H " contour, its corresponding panchromatic image and the prior shape
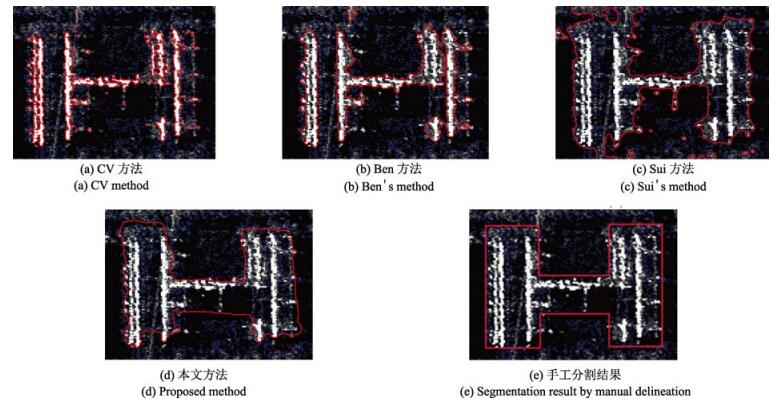
图 6 不同方法对" H "字楼的分割结果
Fig. 6 Segmentation results of the building with " H " contour by different methods
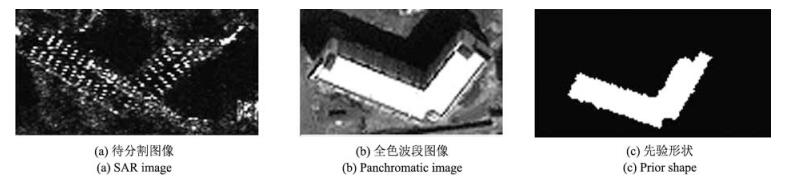
图 7 " L "状楼的SAR图像和全色波段图像及其先验形状
Fig. 7 SAR image of the building with " L " contour, its corresponding panchromatic image and the prior shape
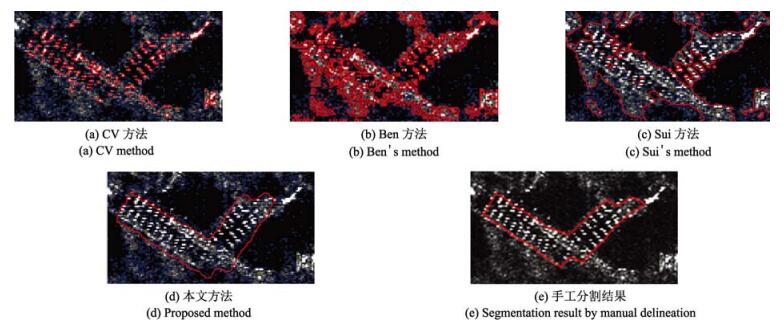
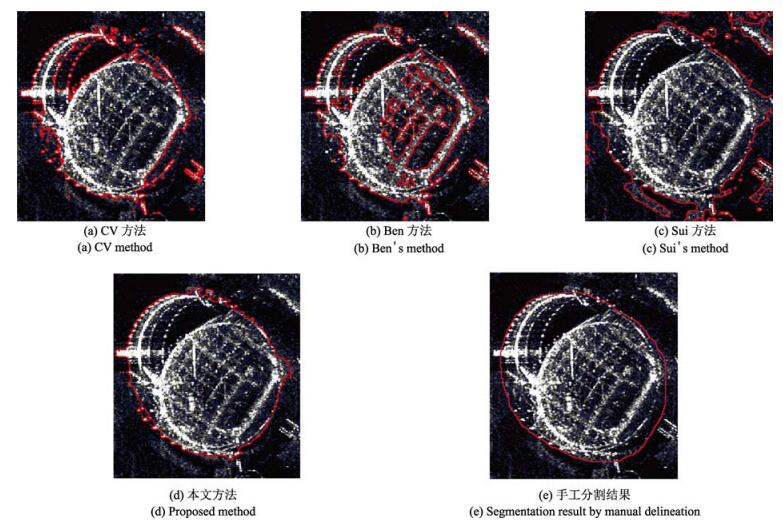
图 8 不同方法对" L "状楼的分割结果
Fig. 8 Segmentation results of the building with " L " contour by different methods
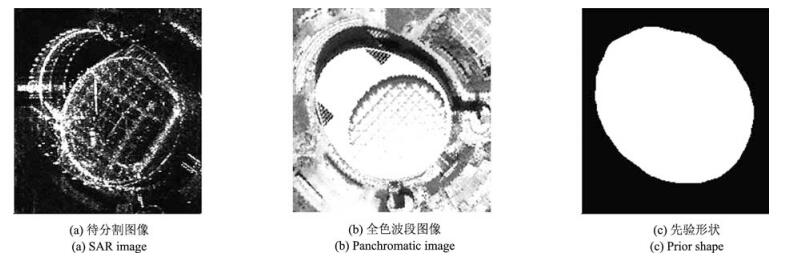
图 9 体育馆的SAR图像和全色波段图像及其先验形状
Fig. 9 The SAR image, its corresponding panchromatic image and the prior shape of the gymnasium
表 1 实验结果比较
Table 1 Comparison of segmentation results
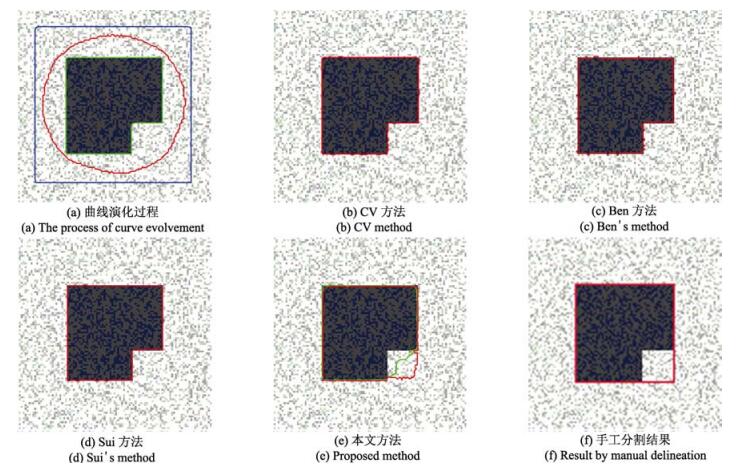
实验名称 CV方法 Ben方法 Sui方法 本文方法 精度 (%) 耗时 (s) 精度 (%) 耗时 (s) 精度 (%) 耗时 (s) 精度 (%) 耗时 (s) 合成图像 97.4 15.4 97.4 21.8 97.3 16.9 99.4 113.7 " H "状楼 28.7 133.9 57.3 82.9 84.0 52.9 89.6 116.1 " L "状楼 13.4 162.3 21.7 20.8 62.9 13.7 91.5 67.1 体育馆 82.0 326.2 76.1 88.0 86.3 101.9 94.1 206.1 平均值 55.4 159.5 63.1 53.3 82.6 46.4 93.7 125.8  下载: 导出CSV
下载: 导出CSV
-
[1] Bovolo F, Marin C, Bruzzone L. A hierarchical approach to change detection in very high resolution SAR images for surveillance applications. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(4):2042-2054 doi: 10.1109/TGRS.2012.2223219 [2] 马秀丽, 焦李成.基于分水岭--谱聚类的SAR图像分割.红外与毫米波学报, 2008, 27(6):452-456 http://www.cnki.com.cn/Article/CJFDTOTAL-HWYH200806013.htmMa Xiu-Li, Jiao Li-Cheng. SAR image segmentation based on watershed and spectral clustering. Journal of Infrared and Millimeter Waves, 2008, 27(6):452-456 http://www.cnki.com.cn/Article/CJFDTOTAL-HWYH200806013.htm [3] 邓晓政, 焦李成, 卢山.基于非负矩阵分解的谱聚类集成SAR图像分割.电子学报, 2011, 39(12):2905-2909 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201112030.htmDeng Xiao-Zheng, Jiao Li-Cheng, Lu Shan. Spectral clustering ensemble applied to SAR image segmentation using nonnegative matrix factorization. Acta Electronica Sinica, 2011, 39(12):2905-2909 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201112030.htm [4] 徐海霞, 田铮, 丁明涛.基于谱聚类与混合模型的SAR图像多尺度分割.中国图象图形学报, 2010, 15(3):450-454 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGTB201003018.htmXu Hai-Xia, Tian Zheng, Ding Ming-Tao. Multiscale segmentation for SAR image based on spectral clustering and mixture model. Journal of Image and Graphics, 2010, 15(3):450-454 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGTB201003018.htm [5] 薛景浩, 章毓晋, 林行刚. SAR图像基于Rayleigh分布假设的最小误差阂值化分割.电子科学学刊, 1999, 21(2):219-225 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX199902012.htmXue Jing-Hao, Zhang Yu-Jin, Lin Xing-Gang. Rayleigh-distribution based minimum error thresholding for SAR images. Journal of Electronics, 1999, 21(2):219-225 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX199902012.htm [6] Han C M, Guo H D, Shao Y, Liao J J. A method to segment SAR images based on histogram. In:Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium. Seoul, Korea (South):IEEE, 2005. 3694-3696 [7] 龙建武, 申铉京, 陈海鹏.自适应最小误差阈值分割算法.自动化学报, 2012, 38(7):1134-1144 doi: 10.3724/SP.J.1004.2012.01134Long Jian-Wu, Shen Xuan-Jing, Chen Hai-Peng. Adaptive minimum error thresholding algorithm. Acta Automatica Sinica, 2012, 38(7):1134-1144 doi: 10.3724/SP.J.1004.2012.01134 [8] 余航, 焦李成, 刘芳.基于上下文分析的无监督分层迭代算法用于SAR图像分割.自动化学报, 2014, 40(1):100-116 http://www.aas.net.cn/CN/abstract/abstract18271.shtmlYu Hang, Jiao Li-Cheng, Liu Fang. Context based unsupervised hierarchical iterative algorithm for SAR segmentation. Acta Automatica Sinica, 2014, 40(1):100-116 http://www.aas.net.cn/CN/abstract/abstract18271.shtml [9] Deng H W, Clausi D A. Unsupervised segmentation of synthetic aperture radar sea ice imagery using a novel Markov random field model. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(3):528-538 doi: 10.1109/TGRS.2004.839589 [10] 侯彪, 徐婧, 刘枫, 焦李成.基于第二代Bandelet域隐马尔科夫树模型的图像分割.自动化学报, 2009, 35(5):498-504 http://www.aas.net.cn/CN/abstract/abstract13437.shtmlHou Biao, Xu Jing, Liu Feng, Jiao Li-Cheng. Image segmentation using second generation Bandelet-domain hidden Markov tree models. Acta Automatica Sinica, 2009, 35(5):498-504 http://www.aas.net.cn/CN/abstract/abstract13437.shtml [11] 傅兴玉, 尤红健, 付琨.基于改进Markov随机场的高分辨率SAR图像建筑物分割算法.电子学报, 2012, 40(6):1141-1147 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201206013.htmFu Xing-Yu, You Hong-Jian, Fu Kun. Building segmentation from high-resolution SAR images based on improved Markov random field. Chinese Journal of Electronics, 2012, 40(6):1141-1147 http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201206013.htm [12] 宋艳涛, 纪则轩, 孙权森.基于图像片马尔科夫随机场的脑MR图像分割算法.自动化学报, 2014, 40(8):1754-1763 http://www.aas.net.cn/CN/abstract/abstract18442.shtmlSong Yan-Tao, Ji Ze-Xuan, Sun Quan-Sen. Brain MR image segmentation algorithm based on Markov random field with image patch. Acta Automatica Sinica, 2014, 40(8):1754-1763 http://www.aas.net.cn/CN/abstract/abstract18442.shtml [13] Chan T F, Vese L A. Active contours without edges. IEEE Transactions on Image Processing, 2001, 10(2):266-277 doi: 10.1109/83.902291 [14] Bresson X, Vandergheynst P, Thiran J P. A variational model for object segmentation using boundary information and shape prior driven by the Mumford-Shah functional. International Journal of Computer Vision, 2006, 68(2):145-162 doi: 10.1007/s11263-006-6658-x [15] Chen F, Yu H M, Hu R, Zeng X X. Deep learning shape priors for object segmentation. In:Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland, OR:IEEE, 2013. 1870-1877 [16] 田昊, 杨剑, 汪彦明, 李国辉.基于先验形状约束水平集模型的建筑物提取方法.自动化学报, 2010, 36(11):1502-1511 doi: 10.3724/SP.J.1004.2010.01502Tian Hao, Yang Jian, Wang Yan-Ming, Li Guo-Hui. Towards automatic building extraction:variational level set model using prior shape knowledge. Acta Automatica Sinica, 2010, 36(11):1502-1511 doi: 10.3724/SP.J.1004.2010.01502 [17] 涂松, 李禹, 粟毅.基于主动轮廓模型的SAR图像分割方法综述.系统工程与电子技术, 2015, 37(8):1754-1766 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201508008.htmTu Song, Li Yu, Su Yi. Overview of SAR image segmentation based on active contour model. Systems Engineering and Electronics, 2015, 37(8):1754-1766 http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201508008.htm [18] Mao C L, Wan S H. A water/land segmentation algorithm based on an improved Chan-Vese model with edge constraints of complex wavelet domain. Chinese Journal of Electronics, 2015, 24(2):361-365 doi: 10.1049/cje.2015.04.023 [19] Zhang S M, He F, Zhang Y L, Wang J M, Mei X, Feng T T. Geometric active contour based approach for segmentation of high-resolution spaceborne SAR images. Journal of Systems Engineering and Electronics, 2015, 26(1):69-76 doi: 10.1109/JSEE.2015.00010 [20] Ben A I, Mitiche A, Belhadj Z. Multiregion level-set partitioning of synthetic aperture radar images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(5):793-800 doi: 10.1109/TPAMI.2005.106 [21] Shuai Y M, Sun H, Xu G. SAR image segmentation based on level set with stationary global minimum. IEEE Geoscience and Remote Sensing Letters, 2008, 5(4):644-648 doi: 10.1109/LGRS.2008.2001768 [22] Sui H G, Xu C, Liu J Y, Sun K M, Wen C F. A novel multi-scale level set method for SAR image segmentation based on a statistical model. International Journal of Remote Sensing, 2012, 33(17):5600-5614 doi: 10.1080/01431161.2012.666814 [23] 唐利明, 田学全, 黄大荣, 王晓峰.结合FCMS与变分水平集的图像分割模型.自动化学报, 2014, 40(6):1233-1248 http://www.aas.net.cn/CN/abstract/abstract18394.shtmlTang Li-Ming, Tian Xue-Quan, Huang Da-Rong, Wang Xiao-Feng. Image segmentation model combined with FCMS and variational level set. Acta Automatica Sinica, 2014, 40(6):1233-1248 http://www.aas.net.cn/CN/abstract/abstract18394.shtml [24] 苏娟, 鲜勇, 宋建社. SAR图像与可见光图像融合的建筑物提取算法.兵工学报, 2010, 31(11):1448-1454 http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201011008.htmSu Juan, Xian Yong, Song Jian-She. A building extraction algorithm based on the fusion of SAR and optical images. Acta Armamentarii, 2010, 31(11):1448-1454 http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201011008.htm [25] Goodman J W. Statistical properties of laser speckle patterns. Laser Speckle and Related Phenomena. Berlin Heidelberg:Spring-Verlag, 1975. 9-75 [26] Li C M, Xu C Y, Gui C F, Fox M D. Level set evolution without re-initialization:a new variational formulation. In:Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA:IEEE, 2005. 430-436 [27] Zou K H, Warfield S K, Bharatha A, Tempany C M C, Kaus M R, Haker S J, Wells W M Ⅲ, Jolesz F A, Kikinis R. Statistical validation of image segmentation quality based on a spatial overlap index. Academic Radiology, 2004, 11(2):178-189 doi: 10.1016/S1076-6332(03)00671-8 -

 下载:
下载:


计量
- 文章访问数: 1856
- HTML全文浏览量: 346
- PDF下载量: 867
- 被引次数: 0
