

-
摘要: 针对负载未知情况下Buck型DC-DC变换器系统, 基于有限时间控制技术和自适应控制技术, 提出了一种新的快速降压控制算法.首先, 基于时间尺度变换, 对系统的平均状态空间方程进行变换; 然后, 利用饱和有限时间控制理论设计出一类新的快速降压控制算法, 以实现输出电压在有限时间内收敛到参考电压.由于控制器设计过程中考虑了饱和约束条件, 使得变换器的占空比函数满足0到1之间的约束条件.对于负载未知情况, 设计了有限时间观测器以估计未知负载, 最终得到自适应式的有限时间控制算法.与PI控制结果进行了仿真对比, 验证了所提出的控制算法既具有快速的调节性能, 又具有较强的抗负载变化性能.Abstract: For Buck DC-DC converter systems with unknown load variations, a new voltage regulation control algorithm is proposed by using the techniques of finite-time control and adaptive control. First, a time-scale transformation is used for the average state space model of the Buck converter system. Then, based on the saturation finite-time control theory, a new fast voltage regulation control algorithm is designed which can guarantee that the output voltage converges to the reference voltage in a finite time. Because the saturation constraint is considered during the controller design, the duty ratio function of the converter satisfies the constraint between 0 and 1. For an unknown load, a finite-time convergent observer is designed to estimate the unknown load. Finally, an adaptive finite-time control algorithm is developed. Compared with the PI control algorithm, numerical simulations show that the proposed algorithm has a faster regulation performance and stronger performance on load-variation rejection.
-
Key words:
- Buck converter /
- finite-time control /
- adaptive control /
- finite-time observer
-

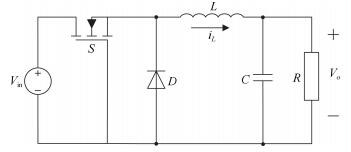
图 2 自适应有限时间电压调节控制算法实现框图
Fig. 2 The block diagram of adaptive finite-time voltage control algorithm
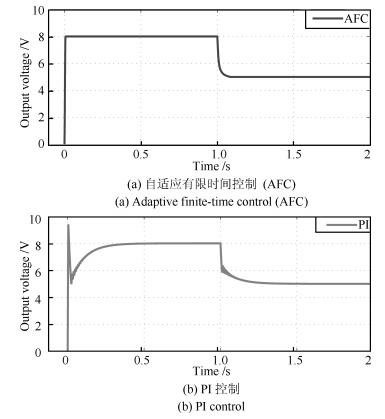
图 3 两种控制算法作用下输出电压响应曲线 (1 s时, 参考电压由8 V $\to$ 5 V)
Fig. 3 The response curves for output voltage under two control algorithms (At 1 second, reference voltage is from 8 V $\to$ 5 V.)

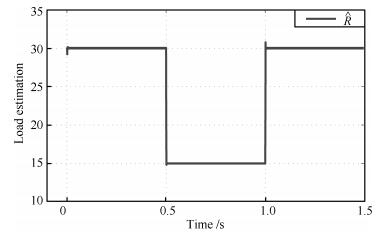
图 4 两种控制算法作用下输出电压响应曲线 (0.5 s时, 负载电阻由30 $\Omega\to15 \Omega$ ; 1 s时, 负载电阻由15 $\Omega\to30 \Omega$ )
Fig. 4 The response curves for output voltage under two control algorithms (At 0.5 second, load resistance is from 30 $\Omega\to15 \Omega$ ; at 1 second, load resistance is from 15 $\Omega\to30 \Omega$ .
-
[1] 张兴, 杜少武, 黄海宏.电力电子技术.北京:科学出版社, 2010.Zhang Xing, Du Shao-Wu, Huang Hai-Hong. Power Electronics Technology. Beijing:Science Press, 2010. [2] Alvarez-Ramirez J, Espinosa-Pérez G, Noriega-Pineda D. Current-mode control of DC-DC power converters:a backstepping approach. International Journal of Robust and Nonlinear Control, 2003, 13(5):421-442 doi: 10.1002/rnc.v13:5 [3] Tan S C, Lai Y M, Tse C K, Cheung M K H. Adaptive feedforward and feedback control schemes for sliding mode controlled power converters. IEEE Transactions on Power Electronics, 2004, 21(1):182-192 [4] Tan S C, Lai Y M, Tse C K. Techniques and implementation. Sliding Mode Control of Switching Power Converters. Boca Raton:CRC press, 2011. [5] Elmas C, Deperlioglu O, Sayan H H. Adaptive fuzzy logic controller for DC-DC converters. Expert Systems with Applications, 2009, 36(2):1540-1548 doi: 10.1016/j.eswa.2007.11.029 [6] Hu T S. A nonlinear-system approach to analysis and design of power-electronic converters with saturation and bilinear terms. IEEE Transactions on Power Electronics, 2011, 26(2):399-410 doi: 10.1109/TPEL.2010.2054115 [7] 李虹, 尚佳宁, 陈姚, 尚倩, 郝瑞祥.基于fal函数的非线性PI控制器在DC-DC变换器中的应用.电工技术学报, 2014, 29(S1):326-331 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS2014S1045.htmLi Hong, Shang Jia-Ning, Chen Yao, Shang Qian, Hao Rui-Xiang. The applications of nonlinear PI controller based on the fal function in the DC-DC converter. Transactions of China Electrotechnical Society, 2014, 29(S1):326-331 http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS2014S1045.htm [8] Zhang C L, Wang J X, Li S H, Wu B, Qian C J. Robust control for PWM-based DC-DC buck power converters with uncertainty via sampled-data output feedback. IEEE Transactions on Power Electronics, 2015, 30(1):504-515 doi: 10.1109/TPEL.2014.2299759 [9] Wang J X, Li S H, Yang J X, Wu B, Li Q. Extended state observer-based sliding mode control for PWM-based DC-DC buck power converter systems with mismatched disturbances. IET Control Theory and Applications, 2015, 9(4):579-586 doi: 10.1049/iet-cta.2014.0220 [10] Bhat S P, Bernstein D S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Transactions on Automatic Control, 1998, 43(5):678-682 doi: 10.1109/9.668834 [11] 丁世宏, 李世华.有限时间控制问题综述.控制与决策, 2011, 26(2):161-169Ding Shi-Hong, Li Shi-Hua. A survey for finite-time control problems. Control and Decision, 2011, 26(2):161-169 [12] 李世华, 丁世宏, 田玉平.一类二阶非线性系统的有限时间状态反馈镇定方法.自动化学报, 2007, 33(1):101-104 doi: 10.1360/aas-007-0101Li Shi-Hua, Ding Shi-Hong, Tian Yu-Ping. A finite-time state feedback stabilization method for a class of second order nonlinear systems. Acta Automatica Sinica, 2007, 33(1):101-104 doi: 10.1360/aas-007-0101 [13] Shen Y J, Xia X H. Semi-global finite-time observers for nonlinear systems. Automatica, 2008, 44(12):3152-3156 doi: 10.1016/j.automatica.2008.05.015 [14] Shen Y J, Huang Y H. Uniformly observable and globally Lipschitzian nonlinear systems admit global finite-time observers. IEEE Transactions on Automatic Control, 2009, 54(11):2621-2625 doi: 10.1109/TAC.2009.2029298 [15] 丁世宏, 李世华.输入饱和下的非线性积分系统的全局有限时间镇定.自动化学报, 2011, 37(10):1222-1231 http://www.aas.net.cn/CN/abstract/abstract17611.shtmlDing Shi-Hong, Li Shi-Hua. Global finite-time stabilization of nonlinear integrator systems subject to input saturation. Acta Automatica Sinica, 2011, 37(10):1222-1231 http://www.aas.net.cn/CN/abstract/abstract17611.shtml [16] Zhai J Y. Global finite-time output feedback stabilisation for a class of uncertain non-triangular nonlinear systems. International Journal of Systems Science, 2014, 45(3):637-646 doi: 10.1080/00207721.2012.724113 [17] Li S H, Zhou M M, Yu X H. Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Transactions on Industrial Informatics, 2013, 9(4):1879-1891 doi: 10.1109/TII.2012.2226896 [18] 李向阳.基于有限时间跟踪微分器的迭代学习控制.自动化学报, 2014, 40(7):1366-1374 http://www.aas.net.cn/CN/abstract/abstract18408.shtmlLi Xiang-Yang. Iterative learning control based on finite time tracking differentiator. Acta Automatica Sinica, 2014, 40(7):1366-1374 http://www.aas.net.cn/CN/abstract/abstract18408.shtml [19] Zhu Y K, Guan X P, Luo X Y. Finite-time consensus of heterogeneous multi-agent systems with linear and nonlinear dynamics. Acta Automatica Sinica, 2014, 40(11):2618-2624 doi: 10.1016/S1874-1029(14)60408-0 [20] 李雪冰, 马莉, 丁世宏.一类新的二阶滑模控制方法及其在倒立摆控制中的应用.自动化学报, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtmlLi Xue-Bing, Ma Li, Ding Shi-Hong. A new second-order sliding mode control and its application to inverted pendulum. Acta Automatica Sinicae, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtml [21] 王芳, 陈鑫, 何勇, 吴敏.联合连通条件下的二阶多智能体系统有限时间一致性控制.控制理论与应用, 2014, 31(7):981-986 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201407020.htmWang Fang, Chen Xin, He Yong, Wu Min. Finite-time consensus control of second-order multi-agent systems with jointly-connected topologies. Control Theory and Applications, 2014, 31(7):981-986 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201407020.htm [22] Liu S C, Geng Z Y, Sun J Y. Finite-time attitude control:a finite-time passivity approach. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1):102-108 doi: 10.1109/JAS.2015.7032911 [23] 董琦, 宗群, 王芳, 田栢苓.基于光滑二阶滑模的可重复使用运载器有限时间再入姿态控制.控制理论与应用, 2015, 32(4):448-455 http://youxian.cnki.com.cn/yxdetail.aspx?filename=KZLY20150512000&dbname=CAPJ2015Dong Qi, Zong Qun, Wang Fang, Tian Bai-Ling. Finite time smooth second-order sliding-mode controller design for reentry reusable launch vehicle. Control Theory and Applications, 2015, 32(4):448-455 http://youxian.cnki.com.cn/yxdetail.aspx?filename=KZLY20150512000&dbname=CAPJ2015 [24] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3):751-766 doi: 10.1137/S0363012997321358 [25] Komurcugil H. Non-singular terminal sliding-mode control of DC-DC buck converters. Control Engineering Practice, 2013, 21(3):321-332 doi: 10.1016/j.conengprac.2012.11.006 [26] Hong Y G, Xu Y S, Huang J. Finite-time control for robot manipulators. Systems and Control Letters, 2002, 46(4):243-253 doi: 10.1016/S0167-6911(02)00130-5 [27] Khalil H K. Nonlinear Systems (3rd Edition). Englewood, NJ, USA:Prentice Hall, 2002. 303-334 [28] Du H B, Qian C J, Yang S Z, Li S H. Recursive design of finite-time convergent observers for a class of time-varying nonlinear systems. Automatica, 2013, 49(2):601-609 doi: 10.1016/j.automatica.2012.11.036 -

 下载:
下载:

计量
- 文章访问数: 2574
- HTML全文浏览量: 309
- PDF下载量: 1095
- 被引次数: 0
