

-
摘要: 双足步行机器人的足迹规划方法难以满足快速步行条件下的计算效率要求, 并存在步幅变化时运动失稳的风险, 2D环境下点机器人栅格规划则难于生成针对双足步行的高效路径.本文提出针对各向异性特征全方位步行机器人的一种路径规划策略, 将状态网格图方法拓展到全方位移动机器人领域, 基于三项基本假设及基元类型划分给出了系统的运动基元枚举及选择方法, 借助实时修正的增量式AD*搜索算法实现仿人机器人在动态环境下的快速路径规划, 通过合理选择启发函数及状态转移代价, 生成了平滑高效的路径, 为后续足迹生成的动力学优化提供了基础.计算机仿真证实了方法对各类环境的适应性, Robocup避障竞速挑战赛的成功表现证明了方法对于机器人样机部署的可行性及其提高步行效率的潜力.Abstract: Footstep planning for bipedal walking robot is difficult to fulfil the requirement of computational efficiency at high walking speed; it also suffers from the risk of falling over with stride variations. On the other hand, 2D grid-based planning strategy for point robots is unable to generate an efficient walking path for bipedal robots. A path planning approach for heterogeneous omnidirectional bipedal walking robot is proposed in this paper. State lattice graph is brought into the omnidirectional moving condition. Based on three assumptions and type classification, a systematic motion primitive enumerating and selecting method is given. The rapid path planning for humanoid robots in dynamic environment can be achieved by making use of the algorithm of anytime repairing incremental search AD*. The smooth and efficient path, generated by reasonable heuristics function and state transfer cost, provides the foundation for dynamics optimized footstep planning. Simulation has demonstrated the adaptability of the biped robot in various environments. The successful performance in obstacle avoidance challenge in Robocup proves the possibility of implementation on physical robots and the capacity for walking efficiency improvement.
-
Key words:
- Humanoid robot /
- path planning /
- state lattice /
- dynamic planning /
- footstep planning
-
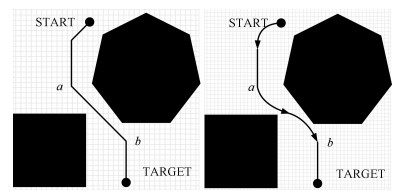
图 1 基于栅格地图规划及曲线路径规划的对比
Fig. 1 Comparison of grid map based planning and curved pathplanning
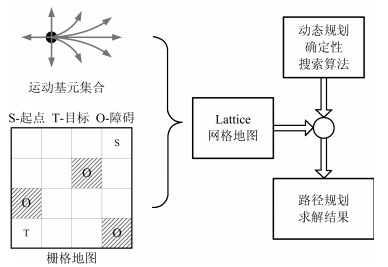
图 3 基于Lattice网格图的路径规划原理图
Fig. 3 Illustration of the state lattice graph based pathplanning
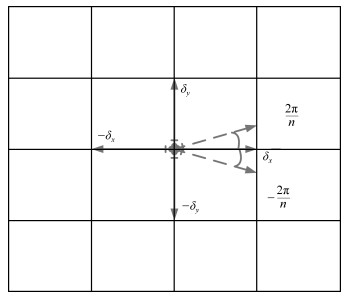
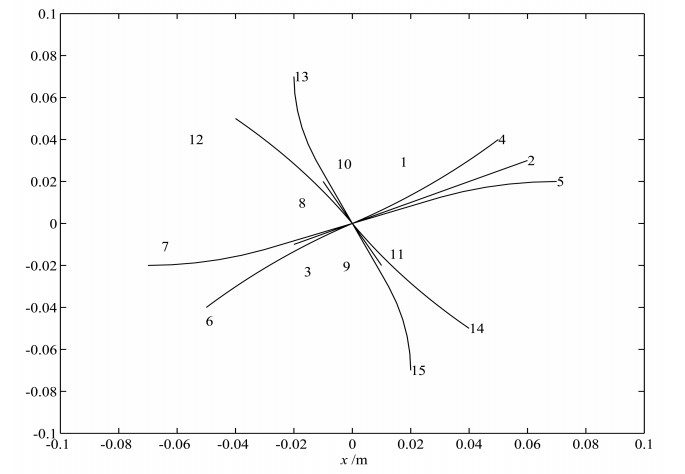
图 4 前进、侧移、旋转一个栅格单位的基本运动单元
Fig. 4 Basic motion primitives including forward walking, sidling and self-spin for one unit
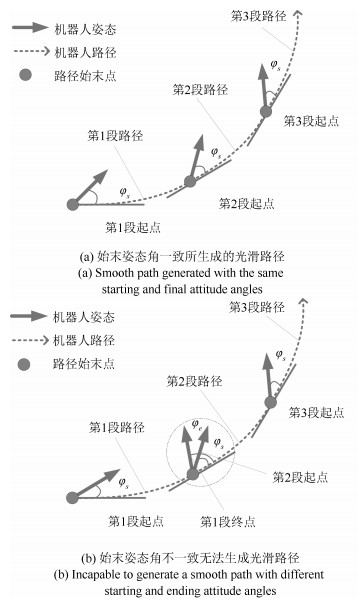
图 5 始末姿态角关系与光滑路径生成示意图
Fig. 5 Illustration of the relationship between the start-endattitude angle and the smooth path generation
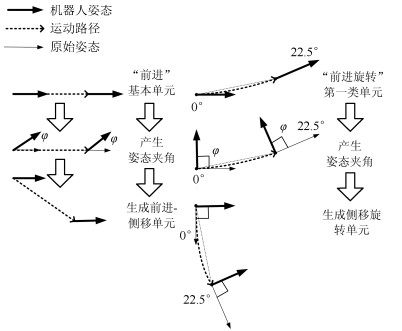
图 7 由基本单元和第一类单元生成第二类单元示意图
Fig. 7 Generation of motion primitives of the second classfrom the basic and the first class
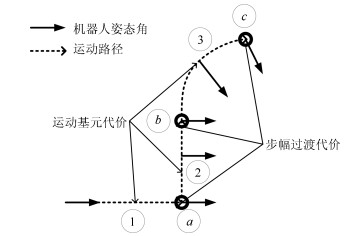
图 9 运动基元代价及步幅过渡代价示意图
Fig. 9 Illustration of the motion primitive cost and statetransferring cost
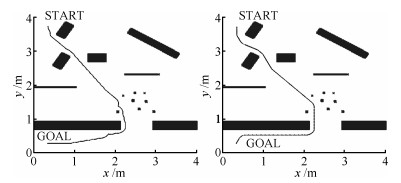
图 10 忽略与考虑运动基元过渡代价的规划结果对比
Fig. 10 Comparison of planning results with ignoring and usingmotion primitive transferring cost
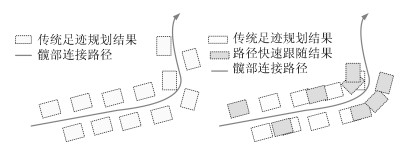
图 11 路径规划与足迹规划的结果对比
Fig. 11 Comparison of result with path planning and footstepplanning
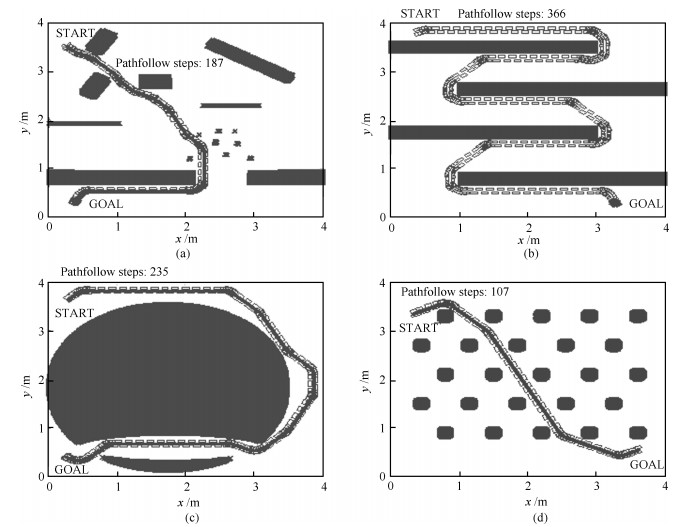
图 12 特定环境下的路径规划和步行跟随结果
Fig. 12 Path planning and path following results in the specified environments
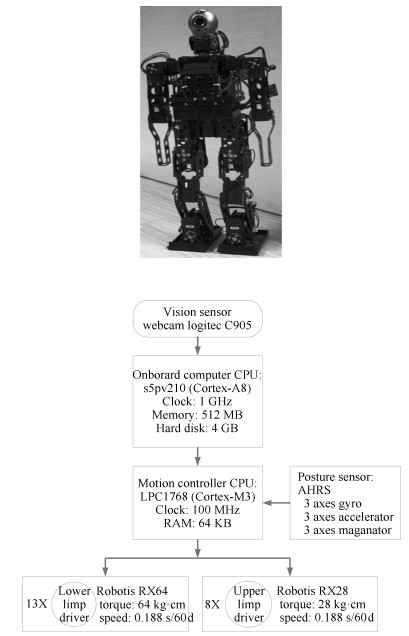
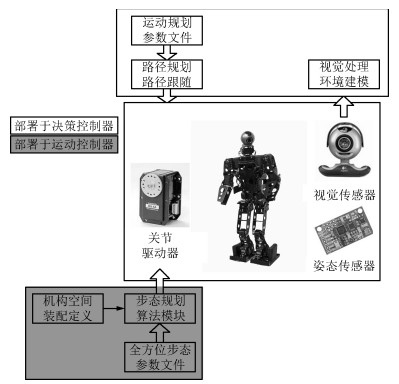
图 13 MOS-Strong仿人机器人外形及控制系统原理图
Fig. 13 Appearance of MOS-Strong humanoid robot and theschematic of its control system
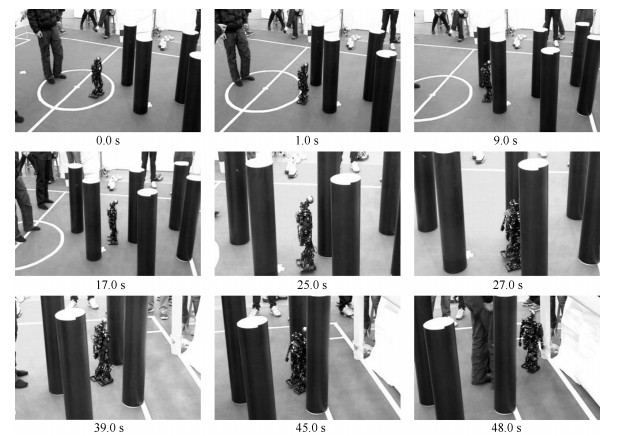
图 15 仿人机器人在Robocup避障竞速中的连拍照片
Fig. 15 Snapshots of the humanoid robot in the obstacleavoidance challenge of Robocup
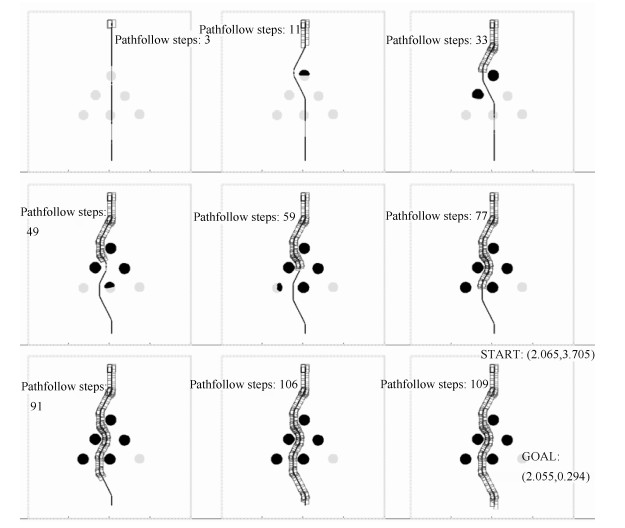
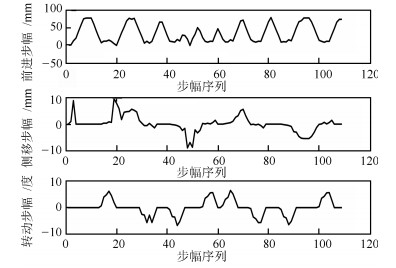
图 16 机器人在Robocup避障竞速中步行与环境感知重现
Fig. 16 Recovery of walking steps and environment perceptionof the robot during the obstacle avoidance challenge in Robocup
-
[1] Spong M W, Hutchinson S, Vidyasagar M. Robot Modeling and Control. Hoboken, NJ, USA:John Wiley and Sons, 2006. [2] Latombe J C. Robot Motion Planning. Berlin, Germany:Springer, 1991. [3] Choset H, Lynch K M, Hutchinson S, Kantor G A, Burgard W, Kavraki L E, Thrun S. Principles of Robot Motion:Theory, Algorithms, and Implementations. Cambridge, UK:A Bradford Book, 2005. [4] Lavalle S M. Planning Algorithms. Cambridge, USA:Cambridge University Press, 2006. [5] Xia Z Y, Xiong J, Chen K. Global navigation for humanoid robots using sampling-based footstep planners. IEEE/ASME Transactions on Mechatronics, 2011, 16(4):716-723 doi: 10.1109/TMECH.2010.2051679 [6] Hornung A, Maier D, Bennewitz M. Search-based footstep planning. In:Proceedings of the 2013 ICRA Workshop on Progress and Open Problems in Motion Planning and Navigation for Humanoids. Karlsruhe, Germany:IEEE, 2013. [7] Xia Z Y, Chen G D, Xiong J, Zhao Q F, Chen K. A random sampling-based approach to goal-directed footstep planning for humanoid robots. In:Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Singapore:IEEE, 2009. 168-173 [8] Xia Z Y, Xiong J, Chen K. Parameter self-adaptation in biped navigation employing nonuniform randomized footstep planner. Robotica, 2010, 28(6):929-936 doi: 10.1017/S0263574709990804 [9] Liu H, Sun Q, Zhang T W. Hierarchical RRT for humanoid robot footstep planning with multiple constraints in complex environments. In:Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura:IEEE, 2012. 3187-3194 [10] Huang W W, Kim J, Atkeson C G. Energy-based optimal step planning for humanoids. In:Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Karlsruhe:IEEE, 2013. 3124-3129 [11] Perrin N, Stasse O, Baudouin L, Lamiraux F, Yoshida E. Fast humanoid robot collision-free footstep planning using swept volume approximations. IEEE Transactions on Robotics, 2012, 28(2):427-439 doi: 10.1109/TRO.2011.2172152 [12] Maier D, Lutz C, Bennewitz M. Integrated perception, mapping, and footstep planning for humanoid navigation among 3D obstacles. In:Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Tokyo:IEEE, 2013. 2658-2664 [13] 张继文, 刘莉, 李昌硕, 陈恳.仿人机器人参数化全方位步态规划方法.机器人, 2014, 36(2):210-217 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201402011.htmZhang Ji-Wen, Liu Li, Li Chang-Shuo, Chen Ken. Parametric Omni-directional gait planning of humanoid Robots. Robot, 2014, 36(2):210-217 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201402011.htm [14] Yoshida E, Esteves C, Belousov I, Laumond J P, Sakaguchi T, Yokoi K. Planning 3-D collision-free dynamic robotic motion through iterative reshaping. IEEE Transactions on Robotics, 2008, 24(5):1186-1198 doi: 10.1109/TRO.2008.2002312 [15] Hornung A, Bennewitz M. Adaptive level-of-detail planning for efficient humanoid navigation. In:Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Saint Paul:IEEE, 2012. 997-1002 [16] Sprunk C, Lau B, Pfaffz P, Burgard W. Online generation of kinodynamic trajectories for non-circular omnidirectional robots. In:Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Shanghai, China:IEEE, 2011. 72-77 [17] Pivtoraiko M, Knepper R A, Kelly A. Differentially constrained mobile robot motion planning in state lattices. Journal of Field Robotics, 2009, 26(3):308-333 doi: 10.1002/rob.v26:3 [18] Likhachev M, Ferguson D. Planning long dynamically feasible maneuvers for autonomous vehicles. The International Journal of Robotics Research, 2009, 28(8):933-945 doi: 10.1177/0278364909340445 [19] 张浩杰, 龚建伟, 姜岩, 熊光明, 陈慧岩.基于变维度状态空间的增量启发式路径规划方法研究.自动化学报, 2013, 39(10):1602-1610 doi: 10.3724/SP.J.1004.2013.01602Zhang Hao-Jie, Gong Jian-Wei, Jiang Yan, Xiong Guang-Min, Chen Hui-Yan. Research on incremental heuristic path planner with variable dimensional state space. Acta Automatica Sinica, 2013, 39(10):1602-1610 doi: 10.3724/SP.J.1004.2013.01602 [20] Bertsekas D P. Dynamic Programming and Optimal Control (Third edition). Belmont, Mass:Athena Scientific, 2005. [21] Kavraki L E, Svestka P, Latombe J C, Overmars M H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Transactions on Robotics and Automation, 1996, 12(4):566-580 doi: 10.1109/70.508439 [22] Lavalle S M. Randomized kinodynamic planning. The International Journal of Robotics Research, 2001, 20(5):378-400 doi: 10.1177/02783640122067453 [23] Likhachev M, Gordon G J, Thrun S. ARA*:anytime A* with provable bounds on sub-optimality. In:Advances in Neural Information Processing Systems. Massachusetts:MIT Press, 2003. 767-774 [24] Likhachev M, Ferguson D, Gordon G, Stentz A, Thrun S. Anytime search in dynamic graphs. Artificial Intelligence, 2008, 172(14):1613-1643 doi: 10.1016/j.artint.2007.11.009 [25] Likhachev M. Sbpl ROS wiki[Online], available:http://wiki.ros.org/sbpl, June 30, 2015. 期刊类型引用(29)
1. 李倩,聂简,黄鸿殿,孔庆宇,奔粤阳. 基于大脑海马认知机理的主从式AUV协同定位方法. 中国惯性技术学报. 2024(01): 27-33 .  百度学术
百度学术2. 游雄,李科,田江鹏,杨剑,余岸竹,贾奋励. 机器地图信息加工模型. 武汉大学学报(信息科学版). 2024(04): 516-526 . 百度学术3. 高昊,王仁茂. 基于类脑仿生的环境感知技术. 舰船电子对抗. 2024(05): 42-46+55 . 百度学术4. 陈荟慧,钟委钊. 基于人机协作的高质量城市图像采集方法. 应用科学学报. 2023(05): 801-814 . 百度学术5. 朱祥维,沈丹,肖凯,马岳鑫,廖祥,古富强,余芳文,高柯夫,刘经南. 类脑导航的机理、算法、实现与展望. 航空学报. 2023(19): 6-38 . 百度学术6. 于乃功,廖诣深. 基于鼠脑内嗅—海马认知机制的移动机器人空间定位模型. 生物医学工程学杂志. 2022(02): 217-227 . 百度学术7. 刘溢,阳加远,张驰. 一种基于RTX的移动机器人实时控制平台. 电子技术与软件工程. 2022(08): 169-172 . 百度学术8. 于子航,王改云. 基于路径积分强化的机器人目标导向运动控制. 计算机仿真. 2022(07): 412-415+516 . 百度学术9. 董卫华,刘毅龙,黑巧松,杨天宇. 泛地图空间认知理论与方法研究框架. 武汉大学学报(信息科学版). 2022(12): 2007-2014 . 百度学术10. 阮晓钢,李鹏,朱晓庆,刘鹏飞. 基于目标导向行为和空间拓扑记忆的视觉导航方法. 计算机学报. 2021(03): 594-608 . 百度学术11. 赵辰豪,吴德伟,韩昆,代传金. 无环境信息下多尺度网格细胞群空间表征模型. 系统工程与电子技术. 2021(03): 814-822 . 百度学术12. 阮晓钢,柴洁,武悦,张晓平,黄静. 基于海马体位置细胞的认知地图构建与导航. 自动化学报. 2021(03): 666-677 . 本站查看13. 冀俊忠,刘金铎,邹爱笑,杨翠翠. 一种融合多源信息的脑效应连接网络蚁群学习算法. 自动化学报. 2021(04): 864-881 . 本站查看14. 万刚,武易天. 地图空间认知的数学基础. 测绘学报. 2021(06): 726-738 . 百度学术15. 洪涛,史涛,任红格. 一种改进型RatSLAM算法构建认知地图的研究. 现代计算机. 2021(21): 47-52 . 百度学术16. 韩昆,吴德伟,来磊. 类脑导航中基于差分Hebbian学习的网格细胞构建模型. 系统工程与电子技术. 2020(03): 674-679 . 百度学术17. 黄宜庆,王正刚,王徽,葛愿. 基于边缘梯度算法的多移动机器人协作地图构建. 信息与控制. 2020(01): 62-68 . 百度学术18. 于乃功,廖诣深,郑相国. 一种基于海马位置细胞选择机制的空间认知模型. 生物医学工程学杂志. 2020(01): 27-37 . 百度学术19. 胡小平,毛军,范晨,张礼廉,何晓峰,韩国良,范颖. 仿生导航技术综述. 导航定位与授时. 2020(04): 1-10 . 百度学术20. 于乃功,冯慧,廖诣深,郑相国. 一种基于感知速度与感知角度的网格野计算模型. 生物医学工程学杂志. 2020(05): 863-874 . 百度学术21. 晁丽君,熊智,杨闯,华冰,王雅婷,刘建业. 无人飞行器三维类脑SLAM自主导航方法. 飞控与探测. 2020(05): 35-43 . 百度学术22. 张孝伍. 图上的概率分布及位置方向信息的表征方法. 青岛理工大学学报. 2019(01): 113-121 . 百度学术23. 方略,何洪军. 基于鼠脑海马位置细胞与Q学习面向目标导航. 生物信息学. 2019(01): 31-38 . 百度学术24. 王均,凌有铸,王静. 基于特征融合的仿生SLAM算法研究. 安徽工程大学学报. 2019(02): 26-33 . 百度学术25. 刘建业,杨闯,熊智,赖际舟,熊骏. 无人机类脑吸引子神经网络导航技术. 导航定位与授时. 2019(05): 52-60 . 百度学术26. 韩昆,吴德伟,来磊,杨林. 自主导航条件下网格细胞放电模型. 电子科技大学学报. 2019(05): 711-716 . 百度学术27. 丛明,邹强,刘冬,杜宇. 定位细胞认知机理启发的机器人导航研究综述. 机械工程学报. 2019(23): 1-12 . 百度学术28. 邹强,丛明,刘冬,杜宇. 仿鼠脑海马的机器人地图构建与路径规划方法. 华中科技大学学报(自然科学版). 2018(12): 83-88 . 百度学术29. 吴德伟,何晶,韩昆,李卉. 无人作战平台认知导航及其类脑实现思想. 空军工程大学学报(自然科学版). 2018(06): 33-38 . 百度学术其他类型引用(29)
-

 下载:
下载:

计量
- 文章访问数: 2038
- HTML全文浏览量: 353
- PDF下载量: 1834
- 被引次数: 58
