

Research on Marine Floating Raft Aquaculture SAR Image Target Recognition Based on Deep Collaborative Sparse Coding Network
-
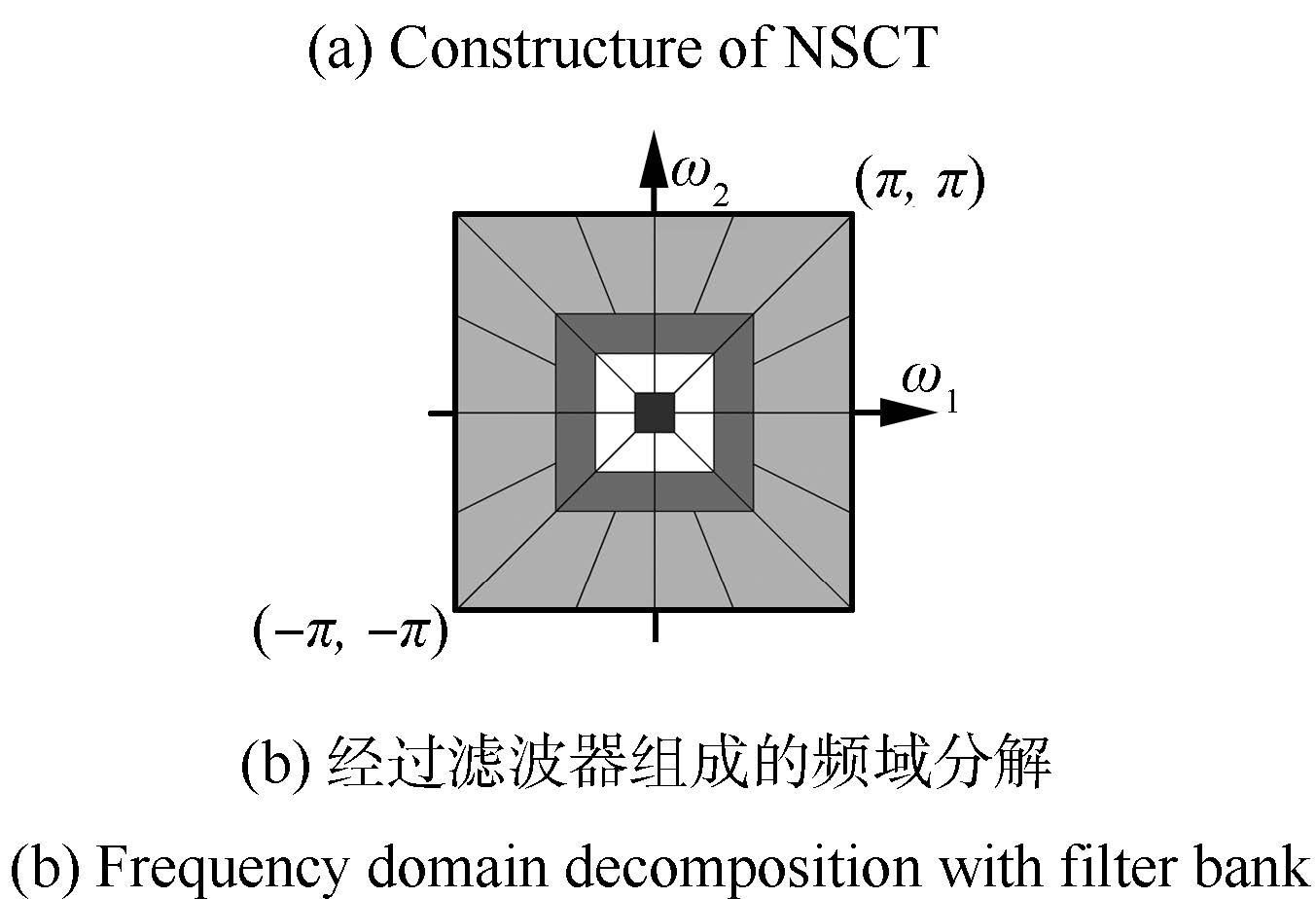
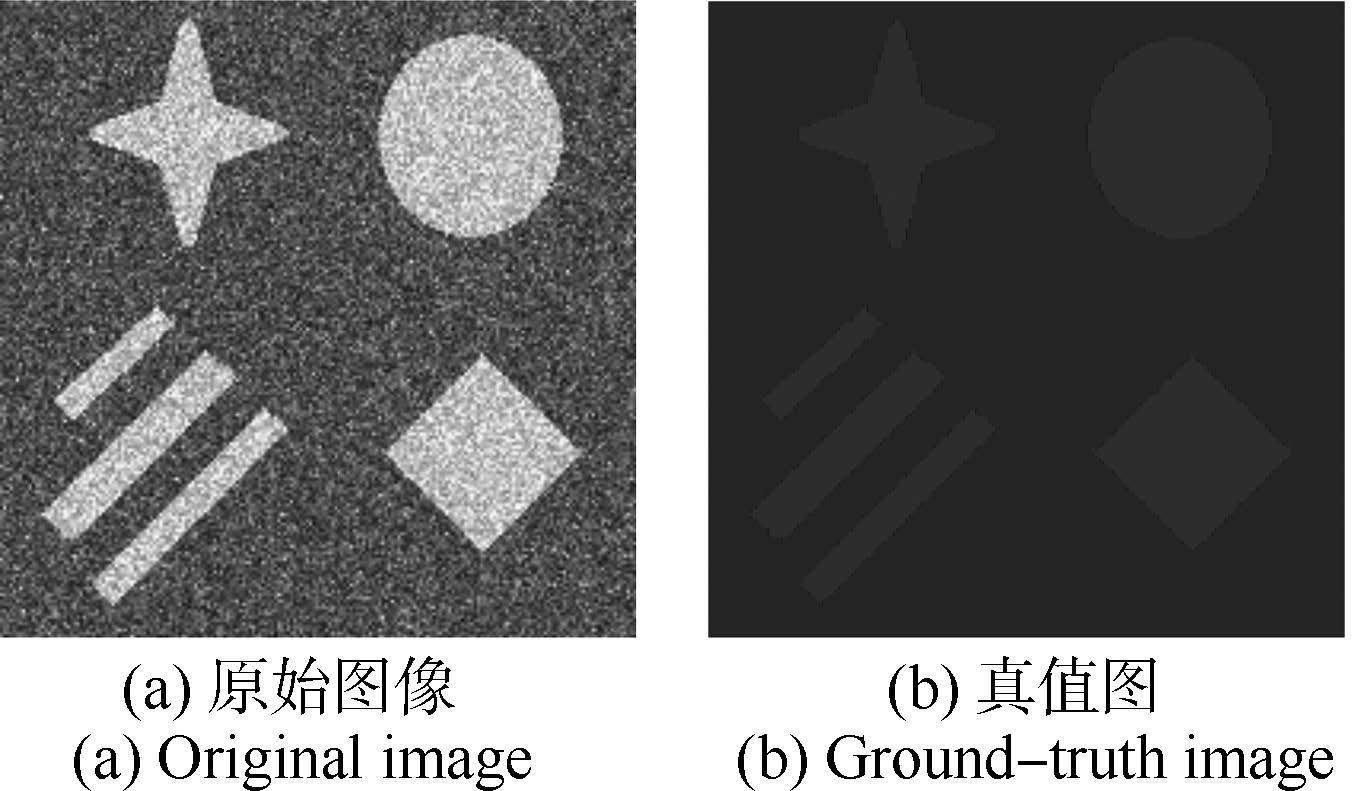
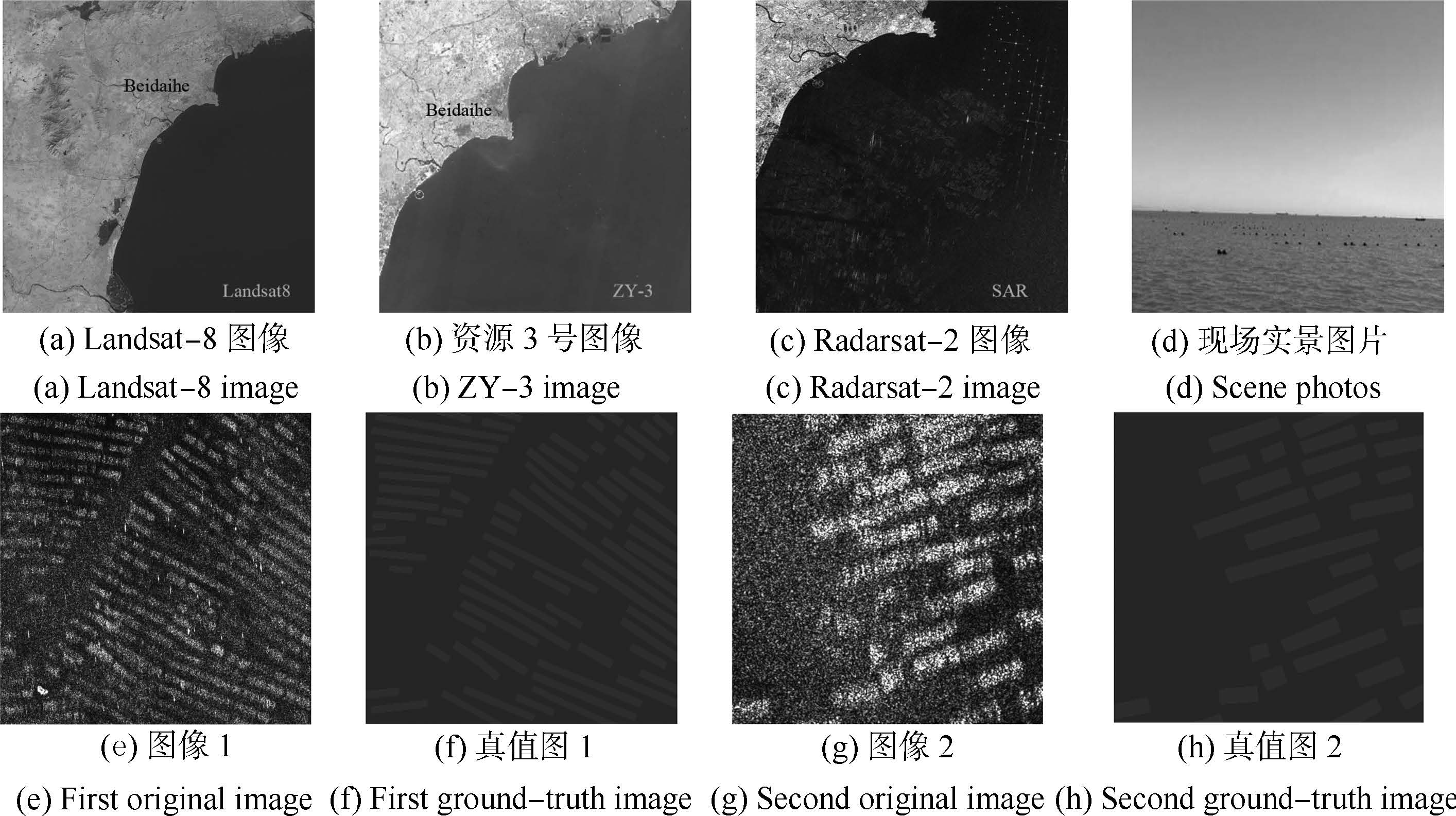
摘要: 浮筏养殖广泛存在于我国近海海域, 可见光遥感图像无法完全准确地获取养殖目标, 而基于主动成像的合成孔径雷达(Synthetic aperture radar, SAR)遥感图像能够得到养殖目标, 因此采用SAR图像进行海洋浮筏养殖目标识别. 然而, 海洋遥感SAR图像包含大量相干斑噪声, 并且SAR图像特征单一, 使得目标识别难度较大. 为解决这些问题, 提出一种深度协同稀疏编码网络(Deep collaborative sparse coding network, DCSCN)进行海洋浮筏识别. 本文方法对预处理后的图像先提取纹理特征和轮廓特征, 再进行超像素分割并将同一个超像素块特征组输入该网络进行协同表示, 最后得到有效特征并分类识别. 通过人工SAR图像和北戴河海域浮筏养殖SAR图像的实验验证所提模型的有效性. 该网络不仅具有优异的特征表示能力, 能够获得更适合分类器的特征, 而且通过近邻协同约束, 有效抑制相干斑噪声影响, 所以提高了SAR图像目标识别精度.Abstract: Floating raft aquaculture is widely distributed in the offshore ocean of China. Since raft information cannot be obtained accurately in the visible remote sensing image, active imaging images acquired from synthetic aperture radar (SAR) are applied. However, oceanic SAR images are seriously contaminated by speckle noise, and effective features of SAR images are deficient, which make recognition difficult. In order to overcome these problems, a deep collaborative sparse coding network (DCSCN) is proposed to extract features and conduct recognition automatically. The proposed method extracts texture features and contour features from the pre-processed image firstly. Then, it segments the image into patches and learns features of each patch collaboratively through the DCSCN network. The optimized features are used for recognition finally. Experiments on the artificial SAR image and the images of Beidaihe demonstrate that the proposed DCSCN network can accurately obtain the area of floating raft aquaculture. Since the network can learn discriminative features and integrate the correlated neighbor pixels, the DCSCN network improves the recognition accuracy and has better performance in overcoming the contamination of speckle noise.
-
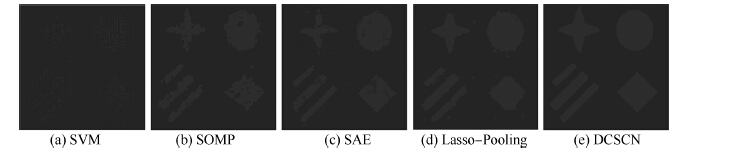
表 1 各个算法在人工SAR 图像上识别结果对比
Table 1 Recognition performance comparison of di®erent algorithms on the arti-cial SAR image
 下载: 导出CSV
下载: 导出CSV
表 2 各个算法在SAR 图像1 浮筏识别结果对比
Table 2 Recognition performance comparison of di®erent algorithms on the -rst SAR image
下载: 导出CSV
表 3 各个算法在SAR 图像2 浮筏识别结果对比
Table 3 Recognition performance comparison of di®erent algorithms on the second SAR image
下载: 导出CSV
-
[1] 余航, 焦李成, 刘芳. 基于上下文分析的无监督分层迭代算法用于SAR图像分割. 自动化学报, 2014, 40(1): 100-116 http://www.aas.net.cn/CN/abstract/abstract18271.shtmlYu Hang, Jiao Li-Cheng, Liu Fang. Context based unsupervised hierarchical iterative algorithm for SAR segmentation. Acta Automatica Sinica, 2014, 40(1): 100-116 http://www.aas.net.cn/CN/abstract/abstract18271.shtml [2] 赵明波, 何峻, 付强. SAR图像CFAR检测的快速算法综述. 自动化学报, 2012, 38(12): 1885-1895 doi: 10.3724/SP.J.1004.2012.01885Zhao Ming-Bo, He Jun, Fu Qiang. Survey on fast CFAR detection algorithms for SAR image targets. Acta Automatica Sinica, 2012, 38(12): 1885-1895 doi: 10.3724/SP.J.1004.2012.01885 [3] 初佳兰, 赵冬至, 张丰收. 基于关联规则的裙带菜筏式养殖遥感识别方法. 遥感技术与应用, 2012, 27(6): 941-946 http://www.cnki.com.cn/Article/CJFDTOTAL-YGJS201206018.htmChu Jia-Lan, Zhao Dong-Zhi, Zhang Feng-Shou. Wakame raft interpretation method of remote sensing based on association rules. Remote Sensing Technology and Application, 2012, 27(6): 941-946 http://www.cnki.com.cn/Article/CJFDTOTAL-YGJS201206018.htm [4] 范剑超, 张丰收, 赵冬至, 文世勇, 卫宝泉. 基于高分辨率卫星遥感SAR图像的海洋浮筏养殖信息提取. 见: 第二届中国沿海地区灾害风险分析与管理学术研讨会. 2014. 59-63Fan Jian-Chao, Zhang Feng-Shou, Zhao Dong-Zhi, Wen Shi-Yong, Wei Bao-Quan. Floating raft aquaculture extraction based on high resolution satellite remote sensing SAR images. In: Proceedings of the 2nd Symposium on Disaster Risk Analysis and Management in Chinese Littoral Regions. 2014. 59-63 [5] Qazi W A, Emery W J, Fox-Kemper B. Computing ocean surface currents over the coastal california current system using 30-min-lag sequential SAR images. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(12): 7559-7580 doi: 10.1109/TGRS.2014.2314117 [6] 潘德炉, 林明森, 毛志华. 海洋微波遥感与应用. 北京: 海洋出版社, 2013.Pan De-Lu, Lin Ming-Shen, Mao Zhi-Hua. Microwave Remote Sensing and Application of Ocean. Beijing: Ocean Press, 2013. [7] Collins M J, Allan J M. Modeling and simulation of SAR image texture. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(10): 3530-3546 doi: 10.1109/TGRS.2009.2021260 [8] Liu C J, Wechsler H. Gabor feature based classification using the enhanced fisher linear discriminant model for face recognition. IEEE Transactions on Image Processing, 2002, 11(4): 467-476 doi: 10.1109/TIP.2002.999679 [9] Do M N, Vetterli M. The contourlet transform: an efficient directional multiresolution image representation. IEEE Transactions on Image Processing, 2005, 14(12): 2091-2106 doi: 10.1109/TIP.2005.859376 [10] Da Cunha A L, Zhou J P, Do M N. The nonsubsampled contourlet transform: theory, design, and applications. IEEE Transactions on Image Processing, 2006, 15(10): 3089-3101 doi: 10.1109/TIP.2006.877507 [11] Yang X H, Jiao L C. Fusion algorithm for remote sensing images based on nonsubsampled contourlet transform. Acta Automatica Sinica, 2008, 34(3): 274-281 doi: 10.3724/SP.J.1004.2008.00274 [12] Hinton G E, Osindero S, Teh Y W. A fast learning algorithm for deep belief nets. Neural Computation, 2006, 18(7): 1527-1554 doi: 10.1162/neco.2006.18.7.1527 [13] Salakhutdinov R, Tenenbaum J B, Torralba A. Learning with hierarchical-deep models. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(8): 1958-1971 doi: 10.1109/TPAMI.2012.269 [14] Goh H, Thome N, Cord M, Lim J H. Learning deep hierarchical visual feature coding. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(12): 2212-2225 doi: 10.1109/TNNLS.2014.2307532 [15] 郑胤, 陈权崎, 章毓晋. 深度学习及其在目标和行为识别中的新进展. 中国图象图形学报, 2014, 19(2): 175-184 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGTB201402002.htmZheng Yin, Chen Quan-Qi, Zhang Yu-Jin. Deep learning and its new progress in object and behavior recognition. Journal of Image and Graphics, 2014, 19(2): 175-184 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGTB201402002.htm [16] Chen X Y, Xiang S M, Liu C L, Pan C H. Vehicle detection in satellite images by hybrid deep convolutional neural networks. IEEE Geoscience and Remote Sensing Letters, 2014, 11(10): 1797-1801 doi: 10.1109/LGRS.2014.2309695 [17] Chen Y S, Lin Z H, Zhao X, Wang G, Gu Y F. Deep learning-based classification of hyperspectral data. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(6): 2094-2107 doi: 10.1109/JSTARS.2014.2329330 [18] 冯博, 陈渤, 王鹏辉, 刘宏伟. 基于稳健深层网络的雷达高分辨距离像目标特征提取算法. 电子与信息学报, 2014, 36(12): 2949-2955 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201412025.htmFeng Bo, Chen Bo, Wang Peng-Hui, Liu Hong-Wei. Feature extraction method for radar high resolution range profile targets based on robust deep networks. Journal of Electronics & Information Technology, 2014, 36(12): 2949-2955 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201412025.htm [19] 李帅, 许悦雷, 马时平, 倪嘉成, 王坤. 基于小波变换和深层稀疏编码的SAR目标识别. 电视技术, 2014, 38(13): 31-35 http://www.cnki.com.cn/Article/CJFDTOTAL-DSSS201413010.htmLi Shuai, Xu Yue-Lei, Ma Shi-Ping, Ni Jia-Cheng, Wang Kun. SAR target recognition using wavelet transform and deep sparse autoencoders. Video Engineering, 2014, 38(13): 31-35 http://www.cnki.com.cn/Article/CJFDTOTAL-DSSS201413010.htm [20] Rai P, Khanna P. A gender classification system robust to occlusion using gabor features based 2D2PCA. Journal of Visual Communication and Image Representation, 2014, 25(5): 1118-1129 doi: 10.1016/j.jvcir.2014.03.009 [21] 张强, 郭宝龙. 基于非采样Contourlet变换多传感器图像融合算法. 自动化学报, 2008, 34(2): 135-141 http://www.aas.net.cn/CN/abstract/abstract15976.shtmlZhang Qiang, Guo Bao-Long. Fusion of multi-sensor images based on the nonsubsampled contourlet transform. Acta Automatica Sinica, 2008, 34(2): 135-141 http://www.aas.net.cn/CN/abstract/abstract15976.shtml [22] Yan C M, Guo B L, Yi M. Fast algorithm for nonsubsampled contourlet transform. Acta Automatica Sinica, 2014, 40(4): 757-762 doi: 10.1016/S1874-1029(14)60007-0 [23] Levinshtein A, Stere A, Kutulakos K N, Fleet D J, Dickinson S J, Siddiqi K. TurboPixels: fast superpixels using geometric flows. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(12): 2290-2297 doi: 10.1109/TPAMI.2009.96 [24] Ng A. Sparse autoencoder [Online], available: http://web. stanford.edu/class/cs294a/sae/, November 8, 2015. [25] Chang C C, Lin C J. LIBSVM: a library for support vector machines. ACM Transactions on Intelligent Systems and Technology, 2011, 2(3): Article No. 27 http://cn.bing.com/academic/profile?id=2153635508&encoded=0&v=paper_preview&mkt=zh-cn [26] Chen Y, Nasrabadi N M, Tran T D. Simultaneous joint sparsity model for target detection in hyperspectral imagery. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 676-680 doi: 10.1109/LGRS.2010.2099640 [27] Mairal J, Bach F, Ponce J. Sparse modeling for image and vision processing. Foundations Trend in Computer Graphics Vision, 2014, 8(2-3): 85-283 doi: 10.1561/0600000058 期刊类型引用(9)
1. 杨旭升,王雪儿,汪鹏君,张文安. 基于渐进无迹卡尔曼滤波网络的人体肢体运动估计. 自动化学报. 2023(08): 1723-1731 .  本站查看
本站查看2. 王洪安,佘青山,马玉良,孔万增,田玉平. 基于时变copula互信息的肌间耦合分析. 中国生物医学工程学报. 2022(02): 140-150 . 百度学术3. 刘作军,许长寿,陈玲玲,张燕. 智能假肢膝关节的研发要点及其研究进展综述. 包装工程. 2021(10): 54-63 . 百度学术4. 吴亚婷,佘青山,高云园,谭同才,范影乐. 多尺度肌间耦合网络分析. 生物医学工程学杂志. 2021(04): 742-752 . 百度学术5. 耿艳利,武正恩,刘作军,陈亚伟. 基于时延估计的动力型下肢假肢分段控制策略研究. 信息与控制. 2021(05): 566-573 . 百度学术6. 冯春燕,康煜炜,张春红,李金波,牛博真. 丘墟透照海针刺治疗对缺血性脑卒中后足内翻患者即刻积分肌电图的影响. 江苏医药. 2021(12): 1223-1225+1230 . 百度学术7. 黄威,高云园,张迎春,佘青山,马玉良. 基于非负矩阵分解和复杂网络的肌间耦合分析. 航天医学与医学工程. 2019(02): 159-166 . 百度学术8. 黄志强,赵宁,苏昭元,苏稼夫,吴强. 刺络拔罐联合康复训练对脑卒中后上肢屈肘痉挛状态及肌电积分值的临床研究. 中国针灸. 2018(02): 119-124 . 百度学术9. 张燕,李威,王建宙,杨鹏,刘作军. 基于TF-CNN与KECA的下肢运动能力评价方法. 仪器仪表学报. 2018(10): 211-222 . 百度学术其他类型引用(19)
-






图(10) / 表(3)
计量
- 文章访问数: 2776
- HTML全文浏览量: 577
- PDF下载量: 2106
- 被引次数: 28
