

Modified Robust Covariance Intersection Fusion Steady-state Kalman Predictor for Uncertain Systems
-
摘要: 针对带随机参数和噪声方差两者不确定性的线性离散多传感器系统,利用虚拟噪声补偿随机参数不确定性,原系统可转化为仅带不确定噪声方差的系统.根据极大极小鲁棒估值原理,用Lyapunov方程方法提出局部鲁棒稳态Kalman预报器及其误差方差最小上界,并利用保守的局部预报误差互协方差,提出改进的鲁棒协方差交叉(Covariance intersection,CI)融合稳态Kalman预报器及其误差方差最小上界.克服了原始CI融合方法要求假设已知局部估值及它们的保守误差方差的缺点和融合误差方差上界具有较大保守性的缺点.证明了鲁棒局部和融合预报器的鲁棒性,并证明了改进的CI融合器鲁棒精度高于原始CI融合器鲁棒精度,且高于每个局部预报器的鲁棒精度.一个仿真例子验证了所提出结果的正确性和有效性.
-
关键词:
- 不确定系统 /
- 协方差交叉融合 /
- 极大极小鲁棒Kalman预报器 /
- 虚拟噪声 /
- Lyapunov方程方法
Abstract: For linear discrete time multisensor systems with both stochastic parameter and noise variance uncertainties, the stochastic parametric uncertainty can be compensated by a fictitious noise, so the original system can be converted into the one with only uncertain noise variances. Based on the minimax robust estimation principle, the local robust steady-state Kalman predictors and the minimal upper bounds of their error variances are presented using the Lyapunov equation approach, and a modified robust covariance intersection (CI) fusion steady-state Kalman predictor and the minimal upper bound of its error variances are presented using the cross-covariances of the conservative local prediction errors. They overcome the disadvantages of the original CI fuser that the local estimates and their conservative error variances are assumed to be known, and the upper bound of fused estimation error variances has large conservativeness. The robustness of the robust local and fused predictors is proved, and it is proved that the robust accuracy of the modified CI fuser is higher than that of the original CI fuser and that of each local predictor. A simulation example shows the correctness and effectiveness of the proposed results. -
信息融合估计的主要目的是得到系统状态的一个融合估值器,它是由多传感器系统中的局部观测数据或者局部状态估值融合而成,它的精度要高于每一个局部估值的精度[1].随着信息科学技术的发展,为了改善系统状态的估计精度,多传感器信息融合Kalman滤波引起了广泛关注,已被应用到包括通信、国防军事、信号处理、无人机、GPS定位等许多领域[2-4].常用的两种融合方法是集中式融合和分布式融合方法[5-6].对于分布式融合方法,有按矩阵加权、按对角阵加权和按标量加权的三种最优加权状态融合方法[6].为了得到最优加权状态融合Kalman滤波器,要求计算局部滤波误差方差和互协方差,而在实际应用中,存在互协方差未知不确定,或者互协方差计算复杂等问题[3].为了克服这种局限性,Julier和Uhlmann在文献[7-9]中提出了带未知互协方差系统协方差交叉(Covariance intersection,CI)融合方法,并被进一步发展[10-11],且广泛应用于跟踪、定位、遥感等许多方面[9, 12-15].原始CI融合方法的优点是互协方差可以是不确定的或者是未知的,它避免了互协方差的计算,可减小计算负担.其缺点和局限性是假设局部估值及误差方差的保守估值已知,且原始CI融合器仅利用了保守局部的估值误差方差信息,而没有利用局部的估值误差互协方差信息,因此给出的实际融合估值误差方差的上界有较大的保守性[16-19].为了减小计算负担,文献[10]提出了序贯协方差交叉(Sequential covariance intersection,SCI)融合Kalman滤波器.为了提高融合器精度,文献[11]提出了椭圆交叉(Ellipse intersection,EI)融合方法,其中利用了一种局部估值互相关信息来改善估值精度.为了改善CI融合估值误差方差的保守上界,文献[17-19]利用保守的局部估值误差互协方差信息,提出了带不确定噪声方差系统改进的鲁棒CI融合器,给出了实际融合误差方差最小上界.
经典Kalman滤波器的设计前提是要求系统的模型参数和噪声方差均为精确已知,然而,在实际应用中,由于未建模动态、模型简化和噪声统计信息不完全等原因,使系统存在不确定性,这将会导致Kalman滤波器性能降低甚至引起滤波发散[20],因此推动了鲁棒Kalman滤波器的研究.所谓鲁棒Kalman滤波器是指,对于所有容许的不确定性,鲁棒Kalman滤波器的实际滤波误差方差被保证有一个最小上界,这个特性称为鲁棒性[21].关于鲁棒Kalman滤波器设计通常采用的两种重要方法是Riccati方程方法[5, 21-22]和线性矩阵不等式(Linear matrix inequation,LMI)方法[21].但这两种方法主要针对噪声方差精确已知而参数不确定的系统.
在随机参数不确定性系统中,称与状态相乘的噪声为乘性噪声或者状态相依噪声.在雷达探测、导弹跟踪、卫星导航、航天军事、机器人、无人机等许多高技术领域,由于模型误差、未建模动态、随机干扰等因素存在,经常遇到带不确定噪声方差[16-19]和乘性噪声[5, 23-34]的多传感器系统状态融合估计问题.
文献[17-19]对带不确定噪声方差系统用Lyapunov方程方法提出了改进的鲁棒CI融合Kalman估值器.但文献[17-19]中的不确定系统均为噪声方差不确定,而系统模型参数假设精确已知.
对噪声方差已知,但带乘性噪声和丢失观测或不确定时滞,或丢包的多传感器随机系统,利用虚拟噪声补偿技术,将乘性噪声转化为加性噪声,可将原系统转换为带常参数阵且带不相关或相关白噪声系统,用标准Kalman滤波方法[23]或射影方法[5, 24-28]设计线性最小方差意义下的最优线性估值器.文献[29]中基于新息分析方法提出集中式、分布式和原始CI融合滤波器.文献[30]用增广状态技术提出了一种多项式滤波器.文献[31]用LMI方法,文献[32-33]用Riccati方程方法设计了Kalman滤波器.文献[34]用随机参数阵的均值矩阵(常参数阵)代替随机参数阵(即"去随机参数阵"方法)可将带随机参数阵系统转化为带乘性噪声系统,进而用虚拟噪声技术设计最优Kalman滤波器.
但是,到目前为止,就作者所知,对同时带随机参数(乘性噪声)和不确定噪声方差系统的鲁棒Kalman估值器尚未见报道.特别地,对这类不确定系统的鲁棒CI融合滤波也尚无报道.
本文针对这类系统用虚拟噪声补偿技术补偿随机参数不确定性,将其转化为仅带不确定噪声方差系统.为了克服传统CI融合器的缺点,应用极大极小鲁棒估值原理[17-19],基于带噪声方差保守方差上界的最坏情形保守系统,设计了"最小方差"局部预报器,并给出了最坏情形下误差方差最小上界,这引出极大极小鲁棒局部预报器,进而提出了一种带保守互协方差的改进的鲁棒CI融合Kalman预报器,给出了它的实际融合预报误差方差的最小上界,用推广的Lyapunov方程方法证明了其鲁棒性,并证明它的鲁棒精度高于原始CI融合器鲁棒精度,且高于每个局部滤波器的鲁棒精度.克服了原始CI融合方法的缺点,推广了文献[17-19]的结果到带乘性噪声和噪声方差两者不确定的系统.\section{问题提出}考虑带随机参数和不确定噪声方差的多传感器线性离散随机系统
$x\left( {t + 1} \right) = \left( {\Phi + \sum\limits_{s = 1}^q {{\xi _s}\left( t \right){\Phi _s}} } \right)x\left( t \right) + \Gamma w\left( t \right)$
(1) ${y_i}\left( t \right) = {H_i}x\left( t \right) + {v_i}\left( t \right),\quad i = 1, \cdots ,L$
(2) 其中, $t\ge0$ 是离散时间,系统在时刻 $t$ 的状态 $\textbf{x}(t)\in {\bf R}^n$ , $\textbf{y}_i\left(t\right)\in {\bf R}^{m_i}$ 是第 $i$ 个子系统的观测,输入噪声 $\textbf{w}(t)\in{\bf R}^r$ , $\textbf{v}_i (t)\in {\bf R}^{m_i }$ 是第 $i$ 个子系统的观测噪声.标量随机参数 $\xi _s \left( t \right)\in {\bf R}^1$ 是乘性噪声. $\Phi$ , $\Phi_s$ , $\Gamma $ 和 $H_i$ 是已知适当维数常阵, $L$ 为传感器的个数.
假设1. $\textbf{w}(t)$ , $\textbf{v}_i(t)$ 和 $\xi _s \left( t\right)$ 是带零均值的互不相关白噪声,它们分别有未知不确定的实际噪声方差 $\bar{Q}$ , $\bar {R}_i $ 和已知的方差 $\sigma _{\xi _s }^2 $ .
\begin{align}&{\rm{E}}\left[{\left( {\begin{array}{*{20}{c}}{\textbf{w}\left( t \right)}\\{{\textbf{v}_i}\left( t \right)}\end{array}} \right)\left( {\begin{array}{*{20}{c}}{{\textbf{w}^{\rm{T}}}\left( k\right)}&{\textbf{v}_j^{\rm{T}}\left( k \right)}\end{array}} \right)} \right] =\\&\ qquad \left[{\begin{array}{*{20}{c}}{\bar Q}&0\\0&{{{\bar R}_i}{\delta _{ij}}}\end{array}} \right]{\delta _{tk}}\end{align}
(3) \begin{align}&\ mbox{E}\left[{\xi _i \left( t \right)\xi _j^{{T}}\left( k \right)} \right]=\sigma _{\xi _i }^2 \delta _{ij} \delta_{tk} ,\\& \mbox{E}\left[{\xi _i \left( t\right)\textbf{w}^{{T}}\left( k \right)} \right]=0,\\&\ mbox{E}\left[{\xi _i \left( t\right)\textbf{v}_j^{{T}} \left( k \right)}\right]=0,\quad \forall t,k,i,j\end{align}
(4) 其中,记号E表示数学期望, $\mbox{T}$ 表示转置, $\forall $ 表示任意. $\delta _{uv} $ 是克罗内克函数, $\delta _{uu} =1,\delta _{uv}=0\left( {u\ne v} \right)$ .
假设2. $Q$ 和 $R_i $ 各为不确定实际噪声方差 $\bar {Q}$ , $\bar {R}_i $ 的已知保守上界,满足如下关系
\begin{align} \bar {Q}\le Q,\quad \bar {R}_i \le R_i\end{align}
(5) 问题是设计鲁棒局部和改进的CI融合稳态Kalman预报器.
引理1[35]. Lyapunov方程
\begin{align}P=FPF^{{T}}+U\end{align}
(6) 其中, $U$ 是对称矩阵,如果矩阵 $F$ 是稳定的(它的所有特征值都在单位圆内),且 $U$ 是正定(或半正定)矩阵,则该Lyapunov方程存在唯一对称且正定(或半正定)解 $P$ .
用虚拟噪声[36]wa(t)补偿式(1) 中的含随机参数项,则式(1) 转化为
\begin{align}\textbf{x}\left( {t+1} \right)=\Phi \textbf{x}\left(t \right)+\textbf{w}_a \left( t \right)\end{align}
(7) 其中,定义虚拟噪声 $\textbf{w}_a \left( t \right)$ 为
\begin{align}\textbf{w}_a \left( t \right)=\sum\limits_{s=1}^q {\xi _s\left( t \right)\Phi _s \textbf{x}\left( t \right)} +\Gamma\textbf{w}\left( t \right)\end{align}
(8) 对带实际噪声方差 $\bar {Q}$ 和 $\bar {R}_i$ 的实际系统式(7) 和式(2) ,由假设1容易证明虚拟噪声 $\textbf{w}_a\left( t \right)$ 是零均值白噪声.定义实际系统稳态状态协方差为 $\bar{X}=\mbox{E}\left[{\textbf{x}\left( t\right)\textbf{x}^{{T}}\left( t \right)}\right]$ ,其中 $\textbf{x}\left( t\right)$ 为带实际噪声方差 $\bar {Q}$ 的实际系统状态,由式(1) 有 $\bar{X}$ 满足推广的Lyapunov方程
\begin{align}\bar {X}=\Phi \bar {X}\Phi ^{{T}}+\sum\limits_{s=1}^q{\sigma _{\xi _s }^2 } \Phi _s \bar {X}\Phi _s^{{T}} +\Gamma\bar {Q}\Gamma ^{{T}}\end{align}
(9) 且 $\textbf{w}_a \left( t \right)$ 有实际方差
\begin{align}\bar {Q}_a =\sum\limits_{s=1}^q {\sigma _{\xi _s }^2 } \Phi _s\bar {X}\Phi _s^{{T}} +\Gamma \bar {Q}\Gamma ^{{T}}\end{align}
(10) 对带保守上界 $Q$ 和 $R_i$ 的最坏情形保守系统式(7) 和式(2) ,定义保守状态协方差 $X=\mbox{E}\left[{\textbf{x}\left( t \right)\textbf{x}^{{T}}\left( t \right)} \right]$ ,其中 $\textbf{x}\left( t\right)$ 为用保守上界 $Q$ 由式(1) 生成的保守系统状态,则有 $X$ 满足推广的Lyapunov方程
\begin{align}X=\Phi X\Phi ^{{T}}+\sum\limits_{s=1}^q {\sigma _{\xi _s }^2} \Phi _s X\Phi _s^{{T}} +\Gamma Q\Gamma ^{{T}}\end{align}
(11) 由式(8) ,有 $\textbf{w}_a \left( t \right)$ 的保守方差
\begin{align}Q_a =\sum\limits_{s=1}^q {\sigma _{\xi _s }^2 } \Phi _s X\Phi_s^{{T}} +\Gamma Q\Gamma ^{{T}}\end{align}
(12) 因 $\Gamma Q\Gamma ^{{T}}\ge 0,\Gamma \bar {Q}\Gamma ^{{T}}\ge0$ ,根据文献[37],推广的Lyapunov方程(9) 和(11) 存在唯一半正定解的充分条件为 $\rho\left( {\bar {\Phi }} \right)<1$ ,其中
\begin{align}\bar {\Phi }=\Phi \otimes \Phi +\sum\limits_{s=1}^q {\sigma _{\xi_s }^2\Phi _s \otimes \Phi _s}\end{align}
(13) 式中, $\otimes $ 为克罗内克积, $\rho \left( {\bar {\Phi }}\right)$ 为 $\bar {\Phi }$ 谱半径.
假设3. $\left( {\Phi ,H_i } \right)$ 为能检测对, $\left( {\Phi ,Q_a^{1/2} } \right)$ 为能稳对, $Q_a =Q_a^{1/2}\left( {Q_a^{1/2} } \right)^{{T}}$ , $\rho \left( {\bar {\Phi}} \right)<1$ .
2. 局部鲁棒稳态 Kalman 预报器根据极大极小鲁棒估值原理
[17-19],考虑带噪声方差保守上界 $Q_a$ 和 $R_i$ 的最坏情形保守系统式(7) 和式(2) ,应用标准Kalman预报算法[38],得到保守的局部稳态线性最小方差Kalman预报器
\begin{align}\hat {\textbf{x}}_i \left( {t+1\vert t} \right)=\Psi _{pi}\hat {\textbf{x}}_i \left( {t\vert t-1} \right)+K_{pi}\textbf{y}_i \left( t \right)\end{align}
(14) \begin{align}&\ Psi _{pi} =\Phi _i -K_{pi}H_i ,\\&K_{pi} =\Phi _i \Sigma _i H_i^{{T}} \left( {H_i \Sigma _i H_i^{{T}} +R_i } \right)^{-1}\end{align}
(15) $\Psi _{pi} $ 是稳定矩阵[38],保守预报误差方差 $\Sigma _i$ 满足Riccati方程
\begin{align}\Sigma _i =\ &{\Phi _i}\Big[{{\Sigma _i} - {\Sigma_i}H_i^{\rm{T}}{{\left( {{H_i}{\Sigma _i}H_i^{\rm{T}} +{R_i}} \right)}^{ - 1}}} \times\\& {{H_i}{\Sigma_i}}\Big]\Phi _i^{\rm{T}} + {Q_a}\end{align}
(16) 由式(2) ,式(7) 和式(14) ,保守的预报误差系统为
\begin{align}&\ tilde {\textbf{x}}_i \left( {t+1\vert t} \right)=\Psi_{pi} \tilde {\textbf{x}}_i \left( {t\vert t-1}\right)+\\&\ qquad\textbf{w}_a (t)-K_{pi} \textbf{v}_i (t)\end{align}
(17) 定义保守的Kalman预报误差 $\tilde {\textbf{x}}_i \left({t+1\vert t} \right)=\textbf{x}_i \left( {t+1} \right)-\hat{\textbf{x}}_i \left( {t+1\vert t} \right)$ , $\textbf{x}\left( {t+1} \right)$ 是由式(7) 给出的保守状态, $\hat {\textbf{x}}\left( {t+1\vert t}\right)$ 是由式(14) 给出的保守Kalman预报器.应用式(17) 得到保守局部预报误差方差和互协方差满足Lyapunov方程
${\Sigma _i} = {\Psi _{pi}}{\Sigma _i}\Psi _{pi}^T + {Q_a} + {K_{pi}}{R_i}K_{pi}^T$
(18) ${\Sigma _{ij}} = {\Psi _{pi}}{\Sigma _{ij}}\Psi _{pj}^T + {Q_a},\quad i \ne j$
(19) 注1. 式(14) 中,保守观测 $\textbf{y}_i \left( t\right)$ 是由带保守上界 $Q$ 和 $R_i$ 的保守系统式(1) 和式(2) 生成,是不可利用的.而实际观测 $\textbf{y}_i(t)$ 是由带实际方差 $\bar{Q}$ 和 $\bar{R}_i$ 的实际系统式(1) 和式(2) 生成,为已知的.因此用已知的实际观测 $\textbf{y}_i(t)$ 替代保守观测 $\textbf{y}_i(t)$ 就得到实际局部Kalman预报器式(14) .
类似地,由式(17) 得到实际局部预报误差方差和互协方差满足Lyapunov方程
\begin{align}\bar {\Sigma }_i =\Psi _{pi} \bar {\Sigma }_i \Psi _{pi}^{{T}} +\bar {Q}_a +K_{pi} \bar {R}_i K_{pi}^{{T}}\end{align}
(20) \begin{align}\bar {\Sigma }_{ij} =\Psi _{pi} \bar {\Sigma }_{ij} \Psi_{pj}^{{T}} +\bar {Q}_a ,\quad i\ne j\end{align}
(21) 由式(9) 和式(10) 引出 $\bar {\Sigma }_i $ 和 $\bar {\Sigma }_{ij}$ 与不确定噪声方差 $\bar {Q}$ 和 $\bar {R}_i $ 有关.
定理1.对带随机参数和噪声方差不确定性的多传感器系统(1) 和(2) ,在假设1 $\sim$ 3下,实际局部稳态Kalman预报器式(14) 是鲁棒的,即对随机参数和所有容许的满足式(5) 的不确定噪声方差 $\bar{Q}$ 和 $\bar {R}_i $ ,有
\begin{align}\bar {\Sigma }_i \le \Sigma _i ,\quad i=1,\cdots ,L\end{align}
(22) 且 $\Sigma _i $ 是 $\bar {\Sigma }_i $ 的最小上界.
证明. 定义 $\Delta \Sigma _i =\Sigma _i -\bar {\Sigma}_i $ ,式(18) 减去式(20) 得Lyapunov方程
\begin{align}\Delta \Sigma _i =\ &\ Psi _{pi} \Delta \Sigma _i \Psi _{pi}^{{T}} +\left( {Q_a-\bar {Q}_a } \right)+\\&K_{pi} \left( {R_i -\bar {R}_i } \right)K_{pi}^{{T}}\end{align}
(23) 为了证明式(22) 成立,先要证明 $Q_a -\bar {Q}_a \ge0$ .事实上,令 $\Delta Q_a =Q_a -\bar {Q}_a $ ,由式(12) 减去式(10) 有
$\Delta {Q_a} = \;\sum\limits_{s = 1}^q {\sigma _{{\xi _s}}^2} {\Phi _s}\left( {X - \bar X} \right)\Phi _s^T + \;\Gamma \left( {Q - \bar Q} \right){\Gamma ^T}$
(24) 于是证明 $\Delta Q_a \ge 0$ 的问题归结为证明 $\Delta X=X-\bar {X}\ge0$ .由式(11) 减去式(9) 得推广的Lyapunov方程
\begin{align}\Delta X=~ &\ Phi \Delta X\Phi ^{{T}}+\sum\limits_{s=1}^q{\sigma _{\xi _s }^2 }\Phi _s \Delta X\Phi _s^{{T}} +\\&\ Gamma \left( {Q-\bar {Q}} \right)\Gamma ^{{T}}\end{align}
(25) 由 $Q-\bar {Q}\ge 0$ 引出 $\Gamma \left( {Q-\bar {Q}} \right)\Gamma^{\rm T}\ge 0$ ,于是由假设 $\rho \left( {\bar {\\\Phi }}\right)<1$ ,根据文献[37]引出推广的Lyapunov方程有唯一半正定解 $\Delta X\ge 0$ ,即 $X-\bar {X}\ge 0$ ,则由式(24) 得到 $Q_a -\bar {Q}_a \ge0$ ,再由 $R_i -\bar {R}_i \ge 0$ 及 $\Psi _{pi}$ 的稳定性,对式(23) 应用引理1,有 $\Delta \Sigma _i \ge0$ ,即式(22) 成立.这表明对满足式(5) 的噪声方差 $\bar {Q}$ 和 $\bar {R}_i$ , $\Sigma _i $ 是 $\bar {\Sigma }_i $ 的上界.特别取满足式(5) 的 $\bar{Q}=Q$ , $\bar {R}_i =R_i $ ,对式(23) 应用引理1得 $\Delta \Sigma _i=0$ ,即 $\bar {\Sigma }_i =\Sigma _i $ ,这表明 $\Sigma _i $ 是 $\bar{\Sigma }_i $ 的最小上界.事实上,如果假设存在另一上界 $\Sigma _i^\ast$ ,使 $\Sigma _i^\ast <\Sigma _i $ ,则取 $\bar {Q}=Q$ , $\bar {R}_i =R_i$ ,有 $\bar {\Sigma }_i \le \Sigma _i^\ast <\Sigma _i $ ,这与 $\bar{\Sigma }_i =\Sigma _i $ 矛盾. $\square$
称实际局部Kalman预报器式(14) 为鲁棒局部Kalman预报器.
3. 鲁棒CI融合稳态 Kalman 预报器
对最坏情形保守系统或实际系统,根据CI融合算法[2],保守的或实际的稳态CI融合Kalman预报器为
\begin{align}\hat {\textbf{x}}_{{CI}} (t+1\vert t)=\Sigma _{{CI}}^{{{\ast}}} \sum\limits_{i=1}^L {\omega _i \Sigma _i^{-1} }\hat {\textbf{x}}_i (t+1\vert t)\end{align}
(26) \begin{align}\Sigma _{{CI}}^\ast =\left[{\sum\limits_{i=1}^L {\omega _i\Sigma _i^{-1} } } \right]^{-1}\end{align}
(27) 其中, $\hat{\textbf{x}}_i (t+1\vert t)$ 是局部保守或鲁棒Kalman预报器,最优加权系数 $\omega _i \ge0$ 满足约束
\begin{align}\omega _1 +\omega _2 +\cdots +\omega _L =1\end{align}
(28) 且极小化性能指标
$\eqalign{ & {\rm{mintr}}\Sigma _{{\rm{CI}}}^{\rm{*}} = \cr & \mathop {\min }\limits_{\matrix{ {{\omega _i} \in [0,1]} \cr {{\omega _1} + {\omega _2} + \cdots + {\omega _L} = 1} \cr } } {\rm{tr}}\left\{ {{{\left[ {\sum\limits_{i = 1}^L {{\omega _i}\Sigma _i^{ - 1}} } \right]}^{ - 1}}} \right\} \cr} $
(29) 其中,记号 $\mbox{tr}$ 表示矩阵的迹.这是一个在 ${\bf R}^L$ 维欧氏空间中带约束非线性最优化问题,可以用Matlab工具箱中的"fmincon"(最优化工具箱)求解最优加权系数 $\omega _1 ,\cdots ,\omega _L$ .由式(27) 有
\begin{align}\textbf{x}(t)=\Sigma _{{CI}}^{{{\ast}}}\sum\limits_{i=1}^L {\omega _i \Sigma _i^{-1} }\textbf{x}(t)\end{align}
(30) 用式(30) 减去式(26) 得到CI融合预报误差
\begin{align}\tilde {\textbf{x}}_{{CI}} (t+1\vert t)=\Sigma_{{CI}}^\ast \sum\limits_{i=1}^L {\omega _i \Sigma _i^{-1} }\tilde {\textbf{x}}_i (t+1\vert t)\end{align}
(31) 由式(31) 分别得到带互协方差 $\Sigma _{ij} $ 和 $\bar {\Sigma }_{ij}$ 的保守和实际CI融合的预报误差方差为
\begin{align}\Sigma _{{CI}}=\Sigma _{{CI}}^\ast\left[\sum\limits_{i=1}^L {\sum\limits_{j=1}^L {\omega _i } }\Sigma _i^{-1} \Sigma _{ij} \Sigma _j^{-1} \omega _j \right]\Sigma_{{CI}}^\ast\end{align}
(32) \begin{align}\bar {\Sigma }_{{CI}} =\Sigma _{{CI}}^\ast\left[\sum\limits_{i=1}^L {\sum\limits_{j=1}^L {\omega _i } }\Sigma _i^{-1} \bar {\Sigma }_{ij} \Sigma _j^{-1} \omega _j\right]\Sigma _{{CI}}^\ast\end{align}
(33) 用文献[16]的配方方法,容易证明原始CI融合器的实际融合误差方差 $\bar{\Sigma }_{{CI}} $ 具有由式(27) 给出的上界 $\Sigma _{{CI}}^\ast $ ,即
\begin{align}\bar {\Sigma }_{{CI}} \le \Sigma _{{CI}}^\ast\end{align}
(34) 由式(27) 知 $\Sigma _{{CI}}^\ast$ 不包含保守互协方差信息,它仅由局部预报误差方差阵 $\Sigma _i$ 的凸组合构成,因此上界 $\Sigma _{{CI}}^\ast$ 具有一定的保守性,即它不是最小上界.下面由定理2提出改进的CI融合器,利用了保守的互协方差信息 $\Sigma_{ij} $ 给出了 $\bar {\Sigma }_{{CI}} $ 的最小上界 $\Sigma_{{CI}} $ .
定理2.对带随机参数和噪声方差两者不确定性的多传感器系统式(1) 和式(2) ,在假设1 $\sim$ 3下,实际CI融合Kalman预报器式(26) 是鲁棒的,即对所有容许的满足式(5) 的不确定噪声方差 $\bar{Q}$ 和 $\bar {R}_i $ ,相应的CI融合实际误差方差 $\bar {\Sigma }_{{CI}} $ 有最小上界 $\Sigma _{{CI}} $ ,其中 $\Sigma _{{CI}}$ 已由式(32) 给出,即有鲁棒性
\begin{align}\bar {\Sigma }_{{CI}} \le \Sigma _{{CI}}\end{align}
(35) 且
\begin{align}\Sigma _{{CI}} \le \Sigma _{{CI}}^\ast\end{align}
(36) 并有矩阵迹精度关系
\begin{align}{{tr}}\bar {\Sigma }_{{CI}} \le {{tr}}\Sigma_{{CI}} \le {{tr}}\Sigma _{{CI}}^\ast \le {{tr}}\Sigma _i,\\ i=1,2,\cdots,L\end{align}
(37) 称带最小上界 $\Sigma _{{CI}}$ 的实际CI融合Kalman预报器式(26) 为改进的鲁棒CI融合Kalman预报器.
证明. 定义
\begin{align}\Omega _i^{{CI}} =\omega _i \Sigma _{{CI}}^\ast \Sigma_i^{-1} ,\quad i=1,2,\cdots ,L\end{align}
(38) \begin{align}\Omega _{{CI}} =\left[{\Omega _{{{1}}}^{{CI}} ,\cdots,\Omega _L^{{CI}} } \right]\end{align}
(39) 则CI融合器式(26) 及误差式(31) 有矩阵加权形式
\begin{align}\hat {\textbf{x}}_{{CI}} (t+1\vert t)=\sum\limits_{i=1}^L {\Omega _i^{{CI}} } \hat{\textbf{x}}_i (t+1\vert t)\end{align}
(40) \begin{align}\tilde {\textbf{x}}_{{CI}} (t+1\vert t)=\sum\limits_{i=1}^L {\Omega _i^{{CI}} } \tilde{\textbf{x}}_i (t+1\vert t)\end{align}
(41) 对式(41) 两边取方差运算,则式(32) 和式(33) 可表示为简单形式
\begin{align}\Sigma _{{CI}} =\Omega _{{CI}} \Sigma \Omega _{{CI}}^{{T}},\quad \bar {\Sigma }_{{CI}} =\Omega_{{CI}} \bar {\Sigma }\Omega _{{CI}}^{{T}}\end{align}
(42) 其中定义总体的保守和实际预报误差方差阵 $\Sigma $ 和 $\bar {\Sigma}$ 分别为
\begin{align}\Sigma =\left( {\Sigma _{ij} } \right)_{nL\times nL},\quad \bar{\Sigma }=\left( {\bar {\Sigma }_{ij} } \right)_{nL\times nL}\end{align}
(43) 其中, $\Sigma $ 和 $\bar {\Sigma }_{ij} $ 的第 $\left( {i,j}\right)$ 子块分别为 $\Sigma _{ij} $ 和 $\bar {\Sigma }_{ij}$ ,它们分别由式(18) $\sim$ (21) 计算,且记 $\Sigma _i =\Sigma _{ii}$ , $\bar {\Sigma }_i =\bar {\Sigma }_{ii} $ .易知由式(18) $\sim$ (21) 给出 $\Sigma $ 和 $\bar {\Sigma}$ 分别满足如下总体Lyapunov方程
\begin{align}\Sigma =\Psi _p \Sigma \Psi _p^{{T}} +Q_a^\ast +K_p RK_p^{{T}}\end{align}
(44) \begin{align}\bar {\Sigma }=\Psi _p \bar {\Sigma }\Psi _p^{{T}} +\bar{Q}_a^\ast +K_p \bar {R}K_p^{{T}}\end{align}
(45) 其中定义 $\Psi _p =\mbox{diag}\left\{ {\Psi _{p_1 } ,\cdots ,\Psi_{p_L } } \right\}$ , $K_p =\mbox{diag}\left\{ {K_{p_1 } ,\cdots,K_{p_L } } \right\}$ , $R=\mbox{diag}\left\{ {R_1 ,\cdots ,R_L }\right\}$ ,且定义
\begin{align}Q_a^\ast =\left[{{\begin{array}{*{20}c} {Q_a } \hfill & \cdots \hfill & {Q_a } \hfill \\ \vdots \hfill & \ddots \hfill & \vdots \hfill \\ {Q_a } \hfill & \cdots \hfill & {Q_a } \hfill \\\end{array} }} \right],\\\bar {Q}_a^\ast =\left[{{\begin{array}{*{20}c} {\bar {Q}_a } \hfill & \cdots \hfill & {\bar {Q}_a } \hfill \\ \vdots \hfill & \ddots \hfill & \vdots \hfill \\ {\bar {Q}_a } \hfill & \cdots \hfill & {\bar {Q}_a } \hfill \\\end{array} }} \right]\end{align}
(46) 由 $\Psi _{pi} $ 的稳定性易知 $\Psi _p$ 是稳定的.用式(44) 减去式(45) ,记 $\Delta \Sigma =\Sigma -\bar{\Sigma }$ ,有总体Lyapunov方程
\begin{align}\Delta \Sigma =\ &\ Psi _p \Delta \Sigma \Psi _p^{{T}} +\left({Q_a^\ast -\bar {Q}_a^\ast } \right)+\\&K_p \left( {R-\bar {R}} \right)K_p^{{T}}\end{align}
(47) 在定理1的证明中,已经证明了 $Q_a -\bar {Q}_a \ge0$ ,于是由式(46) 利用文献[16]的引理1得
\begin{align}Q_a^\ast -\bar {Q}_a^\ast \ge 0\end{align}
(48) 由式(5) 和文献[16]的引理2得
\begin{align}R-\bar {R}\ge 0\end{align}
(49) 因此对式(47) 应用引理1得出 $\Delta \Sigma \ge 0$ ,且由式(42) 有
\begin{align}\Sigma _{{CI}} -\bar {\Sigma }_{{CI}} =\Omega _{{CI}} \Delta \Sigma \Omega _{{CI}}^{{T}}\end{align}
(50) 由 $\Delta \Sigma \ge 0$ 引出 $\Sigma _{{CI}} -\bar {\Sigma}_{{CI}} \ge 0$ ,即式(35) 成立.这意味着 $\Sigma _{{CI}}$ 是 $\bar {\Sigma }_{{CI}}$ 的一个上界.用完全类似于定理1的证明方法,容易证明 $\Sigma _{{CI}} $ 是 $\bar {\Sigma }_{{CI}} $ 的最小上界.由式(34) 有 $\Sigma_{{CI}}^\ast $ 是 $\bar {\Sigma }_{{CI}}$ 的一个上界,故有式(36) 成立.在式(29) 中特别取 $\omega _i =1,\omega _j=0\left( {j\ne i} \right)$ ,则有 $\mbox{tr}\Sigma _{{CI}}^\ast=\mbox{tr}\Sigma _i $ .因为 $\mbox{tr}\Sigma _{{CI}}^\ast$ 在约束(28) 下被极小化,故有 $\mbox{tr}\Sigma _{{CI}}^\ast \le\mbox{tr}\Sigma _i$ ,即式(37) 的第3个不等式成立.对式(35) 和式(36) 取矩阵迹运算引出式(37) 的前2个不等式成立. $\square$
注2.根据文献[16],用估值误差方差阵的迹作为精度指标,较小的迹意味着较高的精度.我们分别定义 $\mbox{tr}\bar{\Sigma }_{{CI}} $ 和 $\mbox{tr}\Sigma _{{CI}}^\ast$ 为CI融合器的实际精度和保守鲁棒精度,定义 $\mbox{tr}\Sigma _{{CI}} $ 为CI融合器的改进的鲁棒精度.对式(22) 取矩阵迹运算,有
\begin{align}\mbox{tr}\bar {\Sigma }_i \le \mbox{tr}\Sigma _i,{\begin{array}{*{20}c} \hfill \\\end{array} }i=1,2,\cdots,L\end{align}
(51) 分别定义 $\mbox{tr}\bar {\Sigma }_i $ 和 $\mbox{tr}\Sigma _i$ 为局部预报器的实际精度和鲁棒精度.精度关系式(37) 意味着局部和CI融合预报器的实际精度高于相应的鲁棒精度.改进CI融合器的鲁棒精度 $\mbox{tr}\Sigma_{{CI}} $ 高于原始CI融合器的保守鲁棒精度 $\mbox{tr}\Sigma_{{CI}}^\ast$ ,且高于每个局部预报器的鲁棒精度.注意,实际精度有关于不确定实际噪声方差 $\bar{Q}$ 和 $\bar {R}_i $ ,而鲁棒精度仅与噪声方差保守上界 $Q$ 和 $R_i$ 有关.根据文献[16],我们已知CI融合器鲁棒精度低于矩阵加权融合器和集中式融合器的鲁棒精度 $\mbox{tr}\Sigma_m $ 和 $\mbox{tr}\Sigma _c $ ,所以还有鲁棒精度关系 $\mbox{tr}\Sigma_{{CI}} \le \mbox{tr}\Sigma _m \le\mbox{tr}\Sigma _c $ 成立.
4. 仿真例子
带随机参数和噪声方差不确定性的两传感器系统(1) 和(2) ,其中 $\textbf{x}\left(t \right)=\left[{x_1 \left( t \right),x_2 \left( t \right)}\right]^{{T}}$ .在仿真中取 $q=1$ ,乘性噪声 $\xi _1 \left( t\right)$ 有已知方差 $\sigma _{\xi _1 }^2 =0.1$ .取 $Q=1.2$ , $R_1 =1.5$ , $\bar {Q}=0.75Q$ , $\bar {R}_1 =0.75R_1 $ , $\bar {R}_2 =0.5R_2 $ , $R_2 =\mbox{diag}\left\{ {64,0.25} \right\}$ ,
$\begin{array}{l} \Phi = \left[ {\begin{array}{*{20}{c}} {0.98}&{0.5}\\ 0&{0.9} \end{array}} \right],\quad {\Phi _1} = \left[ {\begin{array}{*{20}{c}} {0.2}&{0.1}\\ 0&{0.1} \end{array}} \right]\\ \Gamma = \left[ {\begin{array}{*{20}{c}} {0.015}\\ {0.5} \end{array}} \right],\quad {H_1} = \left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\\ {H_2} = {\left[ {\begin{array}{*{20}{c}} 1&0\\ 0&1 \end{array}} \right]_{}} \end{array}$
(52) 根据式(13) 知 $\bar {\Phi }$ 的谱半径 $\rho \left( {\bar {\Phi }}\right)=0.5052<1$ .保守和实际的预报误差方差的迹如表 1所示,表 1验证了精度关系式(37) 和式(51) ,即鲁棒Kalman预报器的实际精度高于其鲁棒精度,且改进的CI融合器的鲁棒精度高于原始CI融合鲁棒精度和每一个局部预报器的鲁棒精度.
为了给出矩阵精度比较的几何解释,定义方差 ${\Sigma _\theta},\theta=1,2,{\rm{CI}}$ 的协方差椭圆是满足 $\left\{ {x:x^{\rm T}\Sigma _\theta ^{-1} x=c}\right\}$ 的 ${\bf R}^n$ 中点的轨迹,不失一般性取常数 $c=1$ .文献[10]中已证明,矩阵不等式精度关系 $\Sigma_1 \le \Sigma _2$ 等价于 $\Sigma _1$ 的协方差椭圆被包含在 $\Sigma _2$ 的协方差椭圆内.图 1给出了基于协方差椭圆的矩阵精度比较,可看到 $\bar{\Sigma }_i $ 的椭圆被包含在 $\Sigma _i $ 的椭圆内, $\bar {\Sigma}_{{CI}} $ 的椭圆被包含在 $\Sigma _{{CI}}$ 的椭圆内,且 $\Sigma _{{CI}} $ 的椭圆被包含在 $\Sigma _{{CI}}^\ast $ 内,这验证了矩阵不等式精度关系式(22) ,式(35) 和式(36) ,其中较小的方差阵意味着较高的精度.
表 1 鲁棒Kalman预报器的鲁棒和实际精度比较Table 1 The comparison of robust and actual accuracies of robust Kalman predictors${\mathop{\rm tr}\nolimits} {\bar \Sigma _1}$ ${\mathop{\rm tr}\nolimits} {\Sigma _1}$ ${\mathop{\rm tr}\nolimits} {\bar \Sigma _2}$ ${\mathop{\rm tr}\nolimits} {\Sigma _2}$ ${\mathop{\rm tr}\nolimits} {\bar \Sigma _{{CI}}}$ ${\mathop{\rm tr}\nolimits} {\Sigma _{{CI}}}$ ${\mathop{\rm tr}\nolimits} \Sigma _{{CI}}^*$ 1.6267 2.1690 1.4425 2.3544 0.8158 1.1437 1.8751  图 1 基于协方差椭圆的局部和CI融合鲁棒Kalman预报器的矩阵不等式精度比较Fig. 1 The comparison of matrix inequality accuracies of the local and CI fused robust Kalman predictors based on covariance ellipses
图 1 基于协方差椭圆的局部和CI融合鲁棒Kalman预报器的矩阵不等式精度比较Fig. 1 The comparison of matrix inequality accuracies of the local and CI fused robust Kalman predictors based on covariance ellipses在图 2中,任意取10组不同满足式(5) 的实际误差方差 $(\bar {Q}^{(k)},\bar{R}_1^{(k)} ,\bar {R}_2^{(k)} )$ , $\bar {Q}^{(k)}=0.1kQ$ , $\bar{R}_1 ^{(k)}=0.1kR_1 $ , $\bar {R}_2 ^{(k)}=0.1kR_2 $ , $k=1,2,\cdots ,$ 10.相应地得到10个实际CI融合误差方差 $\bar {\Sigma}_{{CI}}^{(k)} $ 的椭圆,其中 $k=10$ 对应于 $\bar {Q}=Q$ , $\bar{R}_1 =R_1 $ , $\bar {R}_2 =R_2 $ 时 $\Sigma _{{CI}} $ 的椭圆,它们都被包含在 $\Sigma _{{CI}} $ 和 $\Sigma _{{CI}}^\ast$ 的椭圆里面,且 $\Sigma _{{CI}} $ 的椭圆被包含在 $\Sigma _{{CI}}^\ast $ 的椭圆中.这验证了精度关系式(35) 和式(36) . $\Sigma_{{CI}}$ 是 $\bar {\Sigma }_{{CI}}^{(k)}$ 的最小上界,几何上这意味着同 $\Sigma _{{CI}}^\ast$ 的椭圆相比, $\Sigma _{{CI}}$ 的椭圆是包含所有容许实际方差 $\bar {\Sigma }_{{CI}}^{(k)}$ 椭圆的最紧的椭圆.
 图 2 基于协方差椭圆原始的和改进的鲁棒CI融合Kalman预报器的矩阵不等式精度比较Fig. 2 The comparison of matrix inequality accuracies of the original and modified CI fused robust Kalman predictors based on covariance ellipses
图 2 基于协方差椭圆原始的和改进的鲁棒CI融合Kalman预报器的矩阵不等式精度比较Fig. 2 The comparison of matrix inequality accuracies of the original and modified CI fused robust Kalman predictors based on covariance ellipses为了验证理论精度关系,图 3给出进行1000次Monte-Carlo仿真实验得到的局部和CI融合的均方误差(Mean square error,MSE)曲线 ${\rm{MSE}}_\theta (t),\theta =1,2,{\rm{CI}}$ ,均方误差可看成是实际误差方差阵的采样方差阵的迹,直线代表相应的实际误差方差阵的迹,从图 3中可看出MSE曲线接近相应的直线,这验证了采样方差的一致性.
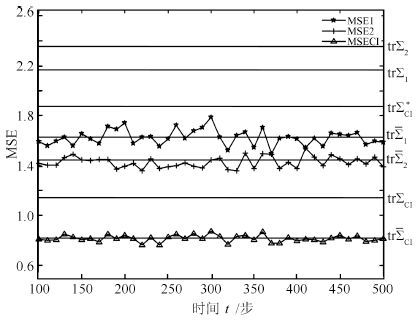 图 3 局部和CI融合鲁棒Kalman预报器的MSE曲线Fig. 3 The MSE curves of the local and CI fused robust Kalman predictors
图 3 局部和CI融合鲁棒Kalman预报器的MSE曲线Fig. 3 The MSE curves of the local and CI fused robust Kalman predictors图 4和图 5给出CI融合鲁棒Kalman预报器误差的两个分量(位置和速度)误差曲线及3-标准差界.在图中,用实线表示实际CI融合鲁棒Kalman预报误差曲线,用虚线表示 $\pm3\sigma _i$ 界,由式(33) 给出的 $\bar{\Sigma }_{{CI}}$ 的第 $\left({i,i}\right)$ 对角元素 $\sigma _i^2\left( {i = 1,2}\right)$ 来计算标准界 $\sigma _i \left( {i=1,2}\right)$ .从图 4和图 5中可以看出超过99{%}的误报误差值都在 $\pm3\sigma _i$ 之间.这验证了CI融合鲁棒Kalman预报器的正确性.
 图 4 位置预报误差曲线和 $\pm 3\sigma _1$ 界Fig. 4 The position prediction error curve and $\pm 3\sigma_1 $ bounds
图 4 位置预报误差曲线和 $\pm 3\sigma _1$ 界Fig. 4 The position prediction error curve and $\pm 3\sigma_1 $ bounds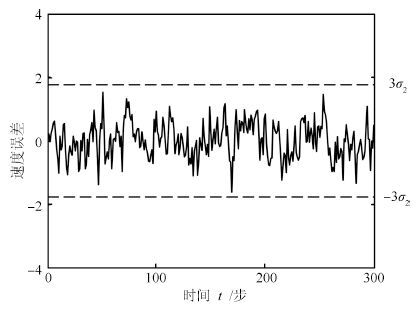 图 5 速度预报误差曲线和 $\pm 3\sigma _2$ 界Fig. 5 The velocity prediction error curve and $\pm 3\sigma _2 $ bounds
图 5 速度预报误差曲线和 $\pm 3\sigma _2$ 界Fig. 5 The velocity prediction error curve and $\pm 3\sigma _2 $ bounds5. 结论
对于带随机参数和噪声方差两者不确定性的多传感器系统,应用虚拟噪声补偿随机参数项,将带随机参数和不确定噪声方差系统转化为仅带不确定噪声方差的多传感器系统,进而基于极大极小鲁棒估计原理,用Lyapunov方程方法系统地提出了改进的鲁棒CI融合Kalman预报方法和算法.同现有文献中的方法和算法相比,本文主要创新和贡献如下.
与原始CI融合方法相比,提出了局部鲁棒Kalman预报器及其误差方差最小上界,克服了原始CI融合方法要求假设已知局部估值及其误差方差保守估值的缺点;提出了改进的鲁棒CI融合Kalman预报器及其误差方差最小上界.因为这个最小上界含有保守的局部估值误差互协方差信息,因而克服了原始CI融合方法给出的CI融合估值误差上界具有较大保守性的缺点[7-9],从而提高了CI融合器鲁棒精度;证明了鲁棒性:局部和融合鲁棒估值器的实际误差方差有相应最小上界;证明了鲁棒精度关系:改进的鲁棒CI融合器的鲁棒精度高于原始鲁棒CI融合器的鲁棒精度,且高于每个局部鲁棒估值器的鲁棒精度.仿真例子给出的数值计算结果和Monte-Carlo仿真结果验证了上述鲁棒精度关系,并且基于协方差椭圆概念给出了矩阵不等式精度关系的几何解释.推广了文献[16-19]中仅带不确定噪声方差的改进的鲁棒CI融合器到带随机参数(乘性噪声)和不确定噪声方差两者的情形.
与新近提出的椭圆交叉(EI)融合方法[11]相比,EI融合方法是基于Bayes准则和局部估值服从正态分布的假设导出的.由于引入了所谓局部估计相互均值和相互协方差信息到融合估计算法中,使EI融合器的精度高于原始CI融合精度[11, 39].但EI融合方法有三个局限性:一是要求假设局部估值服从正态分布,且假设已知其均值和方差;二是EI融合方法目前仅适用于两传感器融合情形[39];三是局部估计相互均值和相互协方差的计算要求解复杂的非线性约束最优化问题.与本文改进的CI融合方法相比,本文方法是基于极大极小鲁棒估计原理和推广的Lyapunov方程方法导出的.在利用保守局部估值误差互协方差信息改进原始CI融合器精度的原理上,同EI融合方法设计原理有异曲同工之处.但本文的保守互协方差概念是完全不同于EI算法中的相互均值和相互协方差概念.本文改进的CI融合方法在一定程度上能克服EI融合方法的上述局限性.本文方法给出了求鲁棒局部估值及其误差方差最小上界算法,不需假设局部估值服从带已知均值和方差的正态分布,适用于多传感器融合情形,且保守互协方差可简单地用Lyapunov方程计算,避免了用复杂非线性最优化求相互协方差.但本文方法仍要求假设不确定噪声方差的保守上界 $Q$ 和 $R_i$ 是已知的.可根据实验或经验选择保守性较小的噪声方差上界,也可以用判别滤波是否发散判别法[20]搜索保守性较小的上界[16].
由于本文目的是改进原始CI融合方法,故改进鲁棒CI融合器与EI融合器的性质的仿真比较研究超出本文范围,有待于进一步研究.
本文改进的CI融合方法适用于带随机参数和噪声方差两者不确定性系统,具有重要的理论和应用意义.本文方法可以推广应用于带随机参数阵[34]和不确定噪声方差系统或带丢失观测、丢包、随机滞后观测[23-29]和不确定噪声方差系统的鲁棒融合Kalman估值器设计,进一步的工作目前在研究中.
-
图 1 基于协方差椭圆的局部和CI融合鲁棒Kalman预报器的矩阵不等式精度比较
Fig. 1 The comparison of matrix inequality accuracies of the local and CI fused robust Kalman predictors based on covariance ellipses
图 2 基于协方差椭圆原始的和改进的鲁棒CI融合Kalman预报器的矩阵不等式精度比较
Fig. 2 The comparison of matrix inequality accuracies of the original and modified CI fused robust Kalman predictors based on covariance ellipses
图 3 局部和CI融合鲁棒Kalman预报器的MSE曲线
Fig. 3 The MSE curves of the local and CI fused robust Kalman predictors
图 4 位置预报误差曲线和 $\pm 3\sigma _1$ 界
Fig. 4 The position prediction error curve and $\pm 3\sigma_1 $ bounds
图 5 速度预报误差曲线和 $\pm 3\sigma _2$ 界
Fig. 5 The velocity prediction error curve and $\pm 3\sigma _2 $ bounds
表 1 鲁棒Kalman预报器的鲁棒和实际精度比较
Table 1 The comparison of robust and actual accuracies of robust Kalman predictors
${\mathop{\rm tr}\nolimits} {\bar \Sigma _1}$ ${\mathop{\rm tr}\nolimits} {\Sigma _1}$ ${\mathop{\rm tr}\nolimits} {\bar \Sigma _2}$ ${\mathop{\rm tr}\nolimits} {\Sigma _2}$ ${\mathop{\rm tr}\nolimits} {\bar \Sigma _{{CI}}}$ ${\mathop{\rm tr}\nolimits} {\Sigma _{{CI}}}$ ${\mathop{\rm tr}\nolimits} \Sigma _{{CI}}^*$ 1.6267 2.1690 1.4425 2.3544 0.8158 1.1437 1.8751  下载: 导出CSV
下载: 导出CSV
-
[1] Liggains M E, Hall D L, Llinas J. Handbook of Multisensor Data Fusion:Theory and Practice (Second Edition). Boca Raton, FL:CRC Press, 2009. [2] Julier S J, Uhlmann J K. General decentralized data fusion with covariance intersection. Handbook of Multisensor Data Fusion:Theory and Practice (Second Edition). Boca Raton, FL:CRC Press, 2009.319-342 [3] Hajiyev C, Soken H E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults. Aerospace Science and Technology, 2013, 28(1):376-383 doi: 10.1016/j.ast.2012.12.003 [4] Ménec S L, Shin H S, Markham K, Tsourdos A, Piet-Lahanier H. Cooperative allocation and guidance for air defence application. Control Engineering Practice, 2014, 32:236-244 doi: 10.1016/j.conengprac.2014.02.011 [5] Feng J X, Wang Z D, Zeng M. Distributed weighted robust Kalman filter fusion for uncertain systems with autocorrelated and cross-correlated noises. Information Fusion, 2013, 14(1):78-86 doi: 10.1016/j.inffus.2011.09.004 [6] Deng Z L, Zhang P, Qi W J, Gao Y, Liu J F. The accuracy comparison of multisensor covariance intersection fuser and three weighting fusers. Information Fusion, 2013, 14(2):177-185 doi: 10.1016/j.inffus.2012.05.005 [7] Julier S J, Uhlmann J K. A non-divergent estimation algorithm in the presence of unknown correlations. In:Proceedings of the 1997 American Control Conference. Albuquerque, NM:IEEE, 1997.2369-2373 http://cn.bing.com/academic/profile?id=2017642774&encoded=0&v=paper_preview&mkt=zh-cn [8] Uhlmann J K. Covariance consistency methods for fault-tolerant distributed data fusion. Information Fusion, 2003, 4(3):201-215 doi: 10.1016/S1566-2535(03)00036-8 [9] Julier S J, Uhlmann J K. Using covariance intersection for SLAM. Robotics & Autonomous Systems, 2007, 55(1):3-20 http://cn.bing.com/academic/profile?id=2006832107&encoded=0&v=paper_preview&mkt=zh-cn [10] Deng Z L, Zhang P, Qi W J, Liu J F, Gao Y. Sequential covariance intersection fusion Kalman filter. Information Sciences, 2012, 189(7):293-309 http://cn.bing.com/academic/profile?id=1984609538&encoded=0&v=paper_preview&mkt=zh-cn [11] Sijs J, Lazar M. State fusion with unknown correlation:ellipsoidal intersection. Automatica, 2012, 48(8):1874-1878 doi: 10.1016/j.automatica.2012.05.077 [12] de Campos Ferreira J C B, Waldmann J. Covariance intersection-based sensor fusion for sounding rocket tracking and impact area prediction. Control Engineering Practice, 2007, 15(4):389-409 doi: 10.1016/j.conengprac.2006.07.002 [13] Gao Q, Chen S Y, Leung H, Liu S T. Covariance intersection based image fusion technique with application to pansharpening in remote sensing. Information Sciences, 2010, 180(18):3434-3443 doi: 10.1016/j.ins.2010.05.010 [14] 齐文娟, 张鹏, 邓自立. 带观测滞后和不确定噪声方差的多智能体传感网络鲁棒序贯协方差交叉融合Kalman滤波. 自动化学报, 2014, 40(11):2632-2642 doi: 10.1016/S1874-1029(14)60410-9Qi Wen-Juan, Zhang Peng, Deng Zi-Li. Robust sequential covariance intersection fusion Kalman filtering over multi-agent sensor networks with measurement delays and uncertain noise variances. Acta Automatica Sinica, 2014, 40(11):2632-2642 doi: 10.1016/S1874-1029(14)60410-9 [15] Lazarus S B, Tsourdos A, Zbikowski R, Nabil A, White B A. Robust localisation using data fusion via integration of covariance intersection and interval analysis. In:Proceedings of the 2007 International Conference on Control, Automation and Systems. Seoul, Korea:IEEE, 2007.199-206 [16] Qi W J, Zhang P, Deng Z L. Robust weighted fusion Kalman filters for multisensor time-varying systems with uncertain noise variances. Signal Processing, 2014, 99:185-200 doi: 10.1016/j.sigpro.2013.12.013 [17] Qi W J, Zhang P, Nie G H, Deng Z L. Robust weighted fusion Kalman predictors with uncertain noise variances. Digital Signal Processing, 2014, 30:37-54 doi: 10.1016/j.dsp.2014.03.011 [18] Qi W J, Zhang P, Deng Z L. Robust weighted fusion time-varying Kalman smoothers for multisensor system with uncertain noise variances. Information Sciences, 2014, 282:15-37 doi: 10.1016/j.ins.2014.06.008 [19] Qi W J, Zhang P, Deng Z L. Weighted fusion robust steady-state Kalman filters for multisensor system with uncertain noise variances. Journal of Applied Mathematics, 2014, 2014:Article ID 369252 http://cn.bing.com/academic/profile?id=2056593946&encoded=0&v=paper_preview&mkt=zh-cn [20] Sriyananda H. A simple method for the control of divergence in Kalman-filter algorithms. International Journal of Control, 1972, 16(6):1101-1106 doi: 10.1080/00207177208932342 [21] Lewis F L, Xie L H, Popa D. Optimal and Robust Estimation (Second Edition). New York:CRC Press, 2007.315-340 [22] Qu X M, Zhou J. The optimal robust finite-horizon Kalman filtering for multiple sensors with different stochastic failure rates. Applied Mathematics Letters, 2013, 26(1):80-86 doi: 10.1016/j.aml.2012.03.036 [23] 吴黎明, 马静, 孙书利. 具有不同观测丢失率多传感器随机不确定系统的加权观测融合估计. 控制理论与应用, 2014, 31(2):244-249 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201402017.htmWu Li-Ming, Ma Jing, Sun Shu-Li. Weighted measurement fusion estimation for stochastic uncertain systems with multiple sensors of different missing measurement rates. Control Theory & Applications, 2014, 31(2):244-249 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201402017.htm [24] 李娜, 马静, 孙书利. 带多丢包和滞后随机不确定系统的最优线性估计. 自动化学报, 2015, 41(3):611-619 http://www.aas.net.cn/CN/abstract/abstract18638.shtmlLi Na, Ma Jing, Sun Shu-Li. Optimal linear estimation for stochastic uncertain systems with multiple packet dropouts and delays. Acta Automatica Sinica, 2015, 41(3):611-619 http://www.aas.net.cn/CN/abstract/abstract18638.shtml [25] Liu W. Optimal filtering for discrete-time linear systems with time-correlated multiplicative measurement noises. IET Control Theory & Applcation, 2015, 9(6):831-842 http://cn.bing.com/academic/profile?id=2039747833&encoded=0&v=paper_preview&mkt=zh-cn [26] Liu W. Optimal estimation for discrete-time linear systems in the presence of multiplicative and time-correlated additive measurement noises. IEEE Transactions on Signal Processing, 2015, 63(17):4583-4593 doi: 10.1109/TSP.2015.2447491 [27] Li F, Zhou J, Wu D Z. Optimal filtering for systems with finite-step autocorrelated noises and multiple packet dropouts. Aerospace Science and Technology, 2013, 24(1):255-263 doi: 10.1016/j.ast.2011.11.013 [28] Zhang S, Zhao Y, Wu F L, Zhao J H. Robust recursive filtering for uncertain systems with finite-step correlated noises, stochastic nonlinearities and autocorrelated missing measurements. Aerospace Science and Technology, 2014, 39(39):272-280 http://cn.bing.com/academic/profile?id=2000347446&encoded=0&v=paper_preview&mkt=zh-cn [29] Tian T, Sun S L, Li N. Multi-sensor information fusion estimators for stochastic uncertain systems with correlated noises. Information Fusion, 2016, 27:126-137 doi: 10.1016/j.inffus.2015.06.001 [30] Carravetta F, Germani A, Raimondi M. Polynomial filtering of discrete-time stochastic linear systems with multiplicative state noise. IEEE Transactions on Automatic Control, 1997, 42(8):1106-1126 doi: 10.1109/9.618240 [31] Wang Z D, Yang F W, Ho D W C, Liu X H. Robust finite-horizon filtering for stochastic systems with missing measurements. IEEE Signal Processing Letters, 2005, 12(6):437-440 doi: 10.1109/LSP.2005.847890 [32] Wang S Y, Fang H J, Tian X G. Recursive estimation for nonlinear stochastic systems with multi-step transmission delays, multiple packet dropouts and correlated noises. Signal Processing, 2015, 115(2):164-175 http://cn.bing.com/academic/profile?id=2080231200&encoded=0&v=paper_preview&mkt=zh-cn [33] Yang F W, Wang Z D, Hung Y S. Robust Kalman filtering for discrete time-varying uncertain systems with multiplicative noises. IEEE Transactions on Automatic Control, 2002, 47(7):1179-1183 doi: 10.1109/TAC.2002.800668 [34] Luo Y T, Zhu Y M, Luo D D, Zhou J, Song E B, Wang D H. Globally optimal multisensor distributed random parameter matrices Kalman filtering fusion with applications. Sensors, 2008, 8(12):8086-8103 doi: 10.3390/s8128086 [35] Kailath T, Sayed A H, Hassibi B. Linear Estimation. New York:Prentice Hall, 2000.766-772 [36] de Koning W L. Optimal estimation of linear discrete-time systems with stochastic parameters. Automatica, 1984, 20(1):113-115 doi: 10.1016/0005-1098(84)90071-2 [37] Wang Z D, Ho D W C, Liu X H. Robust filtering under randomly varying sensor delay with variance constraints. IEEE Transactions on Circuits and Systems Ⅱ:Express Briefs, 2004, 51(6):320-326 doi: 10.1109/TCSII.2004.829572 [38] Anderson B D O, Moore J B. Optimal Filtering. Englewood Cliffs, NJ:Prentice Hall, 1979. http://www.oalib.com/references/16878535 [39] Wu T T, An J, Ding C S, Luo S X. Research on ellipsoidal intersection fusion method with unknown correlation. In:Proceedings of the 15th International Conference on Information Fusion. Singapore:IEEE, 2012.558-564 http://cn.bing.com/academic/profile?id=1708197474&encoded=0&v=paper_preview&mkt=zh-cn 期刊类型引用(4)
1. Yongpeng CUI,Xiaojun SUN. Multi-Sensor Fusion Adaptive Estimation for Nonlinear Under-observed System with Multiplicative Noise. Chinese Journal of Electronics. 2024(01): 282-292 .  必应学术
必应学术2. 崔永鹏,孙小君,张扬. 带乘性噪声的欠观测系统无迹增量Kalman融合估计. 黑龙江大学工程学报(中英俄文). 2024(02): 66-74 . 百度学术3. 马静,杨晓梅,孙书利. 带时间相关乘性噪声多传感器系统的分布式融合估计. 自动化学报. 2023(08): 1745-1757 . 本站查看4. 杨智博,杨春山,邓自立. 面向跟踪系统的多传感器信息融合鲁棒保性能协方差交叉Kalman估计方法. 电子学报. 2017(07): 1627-1636 . 百度学术其他类型引用(14)
-

 下载:
下载:
计量
- 文章访问数: 2610
- HTML全文浏览量: 317
- PDF下载量: 1050
- 被引次数: 18
