

-
摘要: 预见控制因其能够利用已知的未来目标信息或干扰信息来改善控制系统的性能, 在众多实际工程领域得到越来越多的应用, 正日益受到研究者的广泛关注.本文较全面概述了预见控制理论自20世纪60年代提出以后的发展状况, 重点概述线性最优预见控制、线性鲁棒预见控制、非线性预见控制等相关理论的研究进展, 并且总结预见控制在车辆主动悬挂系统、机电伺服系统、机器人、飞行器、电网发电系统等领域的应用现状.最后, 总结了预见控制的研究成果, 探讨了目前存在的主要问题并展望了未来发展方向.本文的综述旨在通过抛砖引玉, 促进预见控制理论及应用的全面发展.Abstract: Preview control can improve control system performance by utilizing future desired or external disturbance information. Therefore, more and more applications are seen in various real engineering fields, attracting a wide spread attention of researchers. This article comprehensively overviews the preview control research achievement since 1960s, and especially introduces the theoretical research progress of linear optimal preview control, linear robust preview control and nonlinear preview control. Furthermore, the application developments of preview control in vehicle active suspension systems, electromechanical servo systems, robots, aircraft and power generation systems are summarized. Finally, the research achievements of the preview control are summarized, and the main problems in researches are discussed to forecast the future development direction. The author hopes to promote the integrated development of the theory and applications of the preview control.
-
Key words:
- Research development /
- preview control /
- optimal control /
- robust control /
- vehicle active suspension system /
- robot /
- aircraft
-

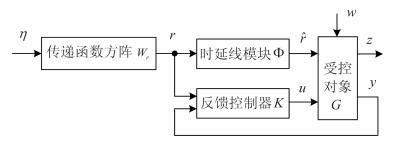
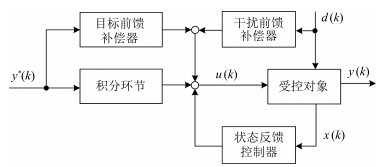
图 5 多输入多预见时间H2预见控制系统
Fig. 5 Multiple input multiple preview time H2 previewcontrol system
-
[1] Sheridan T B. Three models of preview control. IEEE Transactions on Human Factors in Electronics, 1966, HFE-7(2):91-102 doi: 10.1109/THFE.1966.232329 [2] Bender E K. Optimum linear preview control with application to vehicle suspension. Journal of Basic Engineering, 1968, 90(2):213-221 doi: 10.1115/1.3605082 [3] Hayase M, Ichikawa K. Optimal servosystem utilizing future value of desired function. Transactions of the Society of Instrument and Control Engineers, 1969, 5(1):86-94(in Japanese) doi: 10.9746/sicetr1965.5.86 [4] Birla N, Swarup A. Optimal preview control:a review. Optimal Control Applications and Methods, 2015, 36(2):241-268 doi: 10.1002/oca.v36.2 [5] Tomizuka M. Optimal continuous finite preview problem. IEEE Transactions on Automatic Control, 1975, 20(3):362-365 doi: 10.1109/TAC.1975.1100962 [6] Tomizuka M, Whitney D E. Optimal discrete finite preview problems (why and how is future information important?). Journal of Dynamic Systems, Measurement, and Control, 1975, 97(4):319-325 doi: 10.1115/1.3426946 [7] Miller R A. On the finite preview problem in manual control. International Journal of Systems Science, 1976, 7(6):667-672 doi: 10.1080/00207727608941951 [8] Balzer L A. Optimal control with partial preview of disturbances and rate penalties and its application to vehicle suspension. International Journal of Control, 1981, 33(2):323-345 doi: 10.1080/00207178108922926 [9] Katayama T, Ohki T, Inoue T, Kato T. Design of an optimal controller for a discrete-time system subject to previewable demand. International Journal of Control, 1985, 41(3):677-699 doi: 10.1080/0020718508961156 [10] Katayama T, Hirono T. Design of an optimal servomechanism with preview action and its dual problem. International Journal of Control, 1987, 45(2):407-420 doi: 10.1080/00207178708933740 [11] Sternad M, Söderström T. LQG-optimal feedforward regulators. Automatica, 1988, 24:557-561 doi: 10.1016/0005-1098(88)90100-8 [12] Trudnowski D J, Pierre D A. A performance limit for a finite-settling-time system using a look-ahead control. IEEE Transactions on Automatic Control, 1989, 34(7):760-763 doi: 10.1109/9.29407 [13] Halpern M E. Optimal tracking with previewed commands. IEE Proceedings D:Control Theory and Applications, 1991, 138(3):237-241 doi: 10.1049/ip-d.1991.0033 [14] Mosca E, Zappa G. Matrix fraction solution to the discrete-time LQ stochastic tracking and servo problems. IEEE Transactions on Automatic Control, 1989, 34(2):240-242 doi: 10.1109/9.21111 [15] Mosca E, Casavola A, Giarrk L. Minimax LQ stochastic tracking and servo problems. IEEE Transactions on Automatic Control, 1990, 35(1):95-97 doi: 10.1109/9.45153 [16] Mosca E, Casavola A. Deterministic LQ preview tracking design. IEEE Transactions on Automatic Control, 1995, 40(7):1278-1281 doi: 10.1109/9.400477 [17] Halpern M E. Preview tracking for discrete-time SISO systems. IEEE Transactions on Automatic Control, 1994, 39(3):589-592 doi: 10.1109/9.280766 [18] 土谷武士, 江上正[著], 廖福成[译].最新自动控制技术:数字预见控制.北京:科学技术出版社, 1994.Tsuchiya Takeshi, Egami Tadashi[Author], Liao Fu-Cheng[Translator]. Newest Auto Control Technique -Digital Preview Control. Beijing:Science and Technology Press, 1994. [19] 廖福成, 江上正, 土谷武士, 于欣.一般型数字最优预见伺服系统的设计.应用数学和力学, 1996, 17(5):405-417 http://www.cnki.com.cn/Article/CJFDTOTAL-YYSX605.003.htmLiao Fu-Cheng, Egami Tadashi, Tsuchiya Takeshi, Yu Xin. On general type of digital optimal preview servo system. Applied Mathematics and Mechanics, 1996, 17(5):405-417 http://www.cnki.com.cn/Article/CJFDTOTAL-YYSX605.003.htm [20] 廖福成, 土谷武士, 江上正.利用干扰信号二阶差分进行最优预见伺服系统设计.应用数学, 1997, 10(1):87-91 http://www.cnki.com.cn/Article/CJFDTOTAL-YISU199701018.htmLiao Fu-Cheng, Tsuchiya Takeshi, Egami Tadashi. To design optimal preview servo systems by using secondary difference of disturbance signal. Mathematica Applicata, 1997, 10(1):87-91 http://www.cnki.com.cn/Article/CJFDTOTAL-YISU199701018.htm [21] Yu X, Liao F C, Shi M K. Preview control with imaginary input. Journal of Basic Science and Engineering, 1998, 6(3):319-326 http://en.cnki.com.cn/Article_en/CJFDTOTAL-YJGX803.016.htm [22] 廖福成, 土谷武士, 江上正, 于欣.最优预见伺服系统与最优预见FF补偿系统的统一处理.自动化学报, 1998, 24(5):640-646 http://www.aas.net.cn/CN/abstract/abstract16823.shtmlLiao Fu-Cheng, Tsuchiya Takeshi, Egami Tadashi, Yu Xin. Unified handling of optimal preview servo systems and optimal preview FF compensating systems. Acta Automatica Sinica, 1998, 24(5):640-646 http://www.aas.net.cn/CN/abstract/abstract16823.shtml [23] 谭跃钢.同步位置差最优反馈与前馈控制的研究.控制理论与应用, 1997, 14(4):526-530 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199704011.htmTan Yue-Gang. Study of synchro-position error optimal feedback and feedforward control. Control Theory and Applications, 1997, 14(4):526-530 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199704011.htm [24] 谭跃钢, 刘峰.基于面积误差评价的轨迹跟踪数字式最优预见控制.仪器仪表学报, 2004, 25(1):86-89 http://www.cqvip.com/QK/94550X/200401/9295625.htmlTan Yue-Gang, Liu Feng. Digital optimal preview control of trajectory tracking based on trajectory error area. Chinese Journal of Scientific Instrument, 2004, 25(1):86-89 http://www.cqvip.com/QK/94550X/200401/9295625.html [25] Liao F C, Takaba K, Katayama T, Katsuura J. Design of an optimal preview servomechanism for discrete-time systems in a multirate setting. Dynamics of Continuous, Discrete and Impulsive Systems, Series B:Applications and Algorithms, 2003, 10(5):727-744 https://www.researchgate.net/publication/266711308_Design_of_an_optimal_preview_servomechanism_for_discrete-time_systems_in_a_multirate_setting [26] 廖福成, 刘贺平.多重采样离散时间系统的最优预见伺服控制器设计.北京科技大学学报, 2007, 29(5):542-547 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200705021.htmLiao Fu-Cheng, Liu He-Ping. Design of an optimal preview controller for a kind of discrete-time systems. Journal of University of Science and Technology Beijing, 2007, 29(5):542-547 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200705021.htm [27] Liao F C, Tomizuka M, Cao M J, Wang D. Optimal preview control for discrete-time descriptor causal systems in a multirate setting. International Journal of Control, 2013, 86(5):844-854 doi: 10.1080/00207179.2013.764018 [28] 廖福成, 刘贺平.带有状态时滞的多采样率线性离散时间系统的最优预见控制器设计.北京科技大学学报, 2008, 30(4):452-460 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200804025.htmLiao Fu-Cheng, Liu He-Ping. Design of an optimal preview controller for a kind of discrete-time system with time-delay. Journal of University of Science and Technology Beijing, 2008, 30(4):452-460 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200804025.htm [29] 石千松, 廖福成.具有多采样率及状态时滞的线性离散时间系统的预见控制.北京科技大学学报, 2011, 33(3):363-375 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201103019.htmShi Qian-Song, Liao Fu-Cheng. Design of an optimal preview controller for linear discrete-time multirate systems with state-delay. Journal of University of Science and Technology Beijing, 2011, 33(3):363-375 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201103019.htm [30] 徐玉洁, 廖福成.一类状态时滞系统的最优预见控制器设计.北京科技大学学报, 2006, 28(4):403-408 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200604021.htmXu Yu-Jie, Liao Fu-Cheng. Design of the optimum preview controller for a class of state-delay systems. Journal of University of Science and Technology Beijing, 2006, 28(4):403-408 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200604021.htm [31] 廖福成, 徐玉洁.状态时滞时变离散时间系统的最优预见控制器设计.北京科技大学学报, 2012, 34(2):211-216 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201202017.htmLiao Fu-Cheng, Xu Yu-Jie. Design of an optimal preview controller for time-varying discrete-time systems with state time-delay. Journal of University of Science and Technology Beijing, 2012, 34(2):211-216 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201202017.htm [32] 徐玉洁, 廖福成.一类具有输入时滞的时变离散系统的预见控制.控制与决策, 2013, 28(3):466-470 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201303027.htmXu Yu-Jie, Liao Fu-Cheng. Preview control for a class of time-varying discrete systems with input time-delay. Control and Decision, 2013, 28(3):466-470 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201303027.htm [33] Cao M J, Liao F C. Design of an optimal preview controller for linear discrete-time descriptor systems with state delay. International Journal of Systems Science, 2015, 46(5):932-943 doi: 10.1080/00207721.2013.801097 [34] 廖福成, 张志刚, 张莹. Riccati方程的降阶与广义系统的最优预见控制.北京科技大学学报, 2009, 31(4):520-524 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200904022.htmLiao Fu-Cheng, Zhang Zhi-Gang, Zhang Ying. Reduced order of the Riccati equation and optimal preview control of singular systems. Journal of University of Science and Technology Beijing, 2009, 31(4):520-524 http://www.cnki.com.cn/Article/CJFDTOTAL-BJKD200904022.htm [35] 王志胜, 王道波.含理想控制策略和期望轨道的最优控制.控制与决策, 2006, 21(1):100-103 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200601022.htmWang Zhi-Sheng, Wang Dao-Bo. Optimal control with ideal control strategy and expected trajectory. Control and Decision, 2006, 21(1):100-103 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200601022.htm [36] 甄子洋, 王志胜, 王道波.基于信息融合估计的离散线性系统预见控制.自动化学报, 2010, 36(2):347-352 doi: 10.3724/SP.J.1004.2010.00347Zhen Zi-Yang, Wang Zhi-Sheng, Wang Dao-Bo. Information fusion estimation based preview control for discrete linear system. Acta Automatica Sinica, 2010, 36(2):347-352 doi: 10.3724/SP.J.1004.2010.00347 [37] 甄子洋, 王志胜, 王道波.基于误差系统的信息融合最优预见跟踪控制.控制理论与应用, 2009, 26(4):425-428 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200904016.htmZhen Zi-Yang, Wang Zhi-Sheng, Wang Dao-Bo. Optimal preview tracking control based on information fusion in error system. Control Theory and Applications, 2009, 26(4):425-428 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200904016.htm [38] 王志胜, 姜斌, 甄子洋.融合估计与融合控制.北京:科学出版社, 2009.Wang Zhi-Sheng, Jiang Bin, Zhen Zi-Yang. Fusion Estimation and Fusion Control. Beijing:Science Press, 2009. [39] 甄子洋, 王志胜, 王道波.基于信息融合估计的离散系统最优跟踪控制.控制与决策, 2009, 24(1):81-85 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200901016.htmZhen Zi-Yang, Wang Zhi-Sheng, Wang Dao-Bo. Discrete system optimal tracking control based on information fusion estimation. Control and Decision, 2009, 24(1):81-85 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200901016.htm [40] 甄子洋, 王道波, 王志胜.时滞多变量过程信息融合解耦控制.小型微型计算机系统, 2010, 31(3):549-552 http://www.cnki.com.cn/Article/CJFDTOTAL-XXWX201003033.htmZhen Zi-Yang, Wang Dao-Bo, Wang Zhi-Sheng. Information fusion decoupling control method for time-delayed multivariable process. Journal of Chinese Computer Systems, 2010, 31(3):549-552 http://www.cnki.com.cn/Article/CJFDTOTAL-XXWX201003033.htm [41] Zhen Z Y, Wang Z S, Zhou H. Information fusion based solving method for linear quadratic optimal control problem. In:Proceedings of the 7th IEEE International Conference on Control and Automation. Christchurch, New Zealand:IEEE, 2009. 727-731 [42] 甄子洋, 王志胜, 王道波.离散线性信息融合最优跟踪控制.控制与决策, 2009, 24(6):869-873, 878 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200906014.htmZhen Zi-Yang, Wang Zhi-Sheng, Wang Dao-Bo. Discrete linear information fusion optimal tracking control. Control and Decision, 2009, 24(6):869-873, 878 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200906014.htm [43] 甄子洋, 江驹, 王志胜, 王新华.有限时间信息融合线性二次型最优控制.控制理论与应用, 2012, 29(2):172-176 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201202007.htmZhen Zi-Yang, Jiang Ju, Wang Zhi-Sheng, Wang Xin-Hua. Finite-time information fusion for linear quadratic optimal control. Control Theory and Applications, 2012, 29(2):172-176 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201202007.htm [44] 李冬梅, 胡振坤, 胡恒章.线性离散系统的最优预见控制.南京理工大学学报, 2002, 26(3):284-289 http://www.cnki.com.cn/Article/CJFDTOTAL-NJLG200203014.htmLi Dong-Mei, Hu Zhen-Kun, Hu Heng-Zhang. Optimal preview control of linear discrete systems. Journal of Nanjing University of Science and Technology, 2002, 26(3):284-289 http://www.cnki.com.cn/Article/CJFDTOTAL-NJLG200203014.htm [45] Kojima A, Ishijima S. LQ preview synthesis:optimal control and worst case analysis. IEEE Transactions on Automatic Control, 1999, 44(2):352-357 doi: 10.1109/9.746265 [46] Kojima A. H2 performance on preview feedforward action. In:Proceedings of the 16th International Symposium on Mathematical Theory of Networks and Systems. Leuven, Belgium, 2004. 1-5 [47] Liao F C, Xu Y J, Wu J. Novel approach to preview control for a class of continuous-time systems. Journal of Control Science and Engineering, 2015, 2015:Article ID 745137 [48] Marro G, Zattoni E. H2-optimal rejection with preview in the continuous-time domain. Automatica, 2005, 41(5):815-821 doi: 10.1016/j.automatica.2004.11.030 [49] Moelja A A, Meinsma G. H2-optimal control of systems with multiple I/O delays:time domain approach. Automatica, 2005, 41(7):1229-1238 doi: 10.1016/j.automatica.2005.01.016 [50] Tadmor G. Robust control in the gap:a state-space solution in the presence of a single input delay. IEEE Transactions on Automatic Control, 1997, 42(9):1330-1335 doi: 10.1109/9.623103 [51] Moelja A A, Meinsma G. H2 control of preview systems. Automatica, 2006, 42(6):945-952 doi: 10.1016/j.automatica.2006.01.023 [52] Kristalny M, Mirkin L. On the H2 two-sided model matching problem with preview. IEEE Transactions on Automatic Control, 2012, 57(1):204-209 doi: 10.1109/TAC.2011.2161053 [53] Zou Q Z. Optimal preview-based stable-inversion for output tracking of nonminimum-phase linear systems. Automatica, 2009, 45(1):230-237 doi: 10.1016/j.automatica.2008.06.014 [54] Zou Q Z, Devasia S. Precision preview-based stable-inversion for nonlinear nonminimum-phase systems:the VTOL example. Automatica, 2007, 43(1):117-127 doi: 10.1016/j.automatica.2006.08.007 [55] Chen J, Ren Z, Hara S, Qin L. Optimal tracking performance:preview control and exponential signals. IEEE Transactions on Automatic Control, 2001, 46(10):1647-1653 doi: 10.1109/9.956066 [56] Cohen A, Shaked U. Linear discrete-time H∞-optimal tracking with preview. In:Proceedings of the 34th IEEE Conference on Decision and Control. New Orleans, LA, USA:IEEE, 1995, 3:2555-2561 [57] Cohen A, Shaked U. Linear discrete-time H∞-optimal tracking with preview. IEEE Transactions on Automatic Control, 1997, 42(2):270-276 doi: 10.1109/9.554409 [58] Cohen A, Shaked U. Robust discrete-time H∞ optimal tracking with preview. International Journal of Robust and Nonlinear Control, 1998, 8(1):29-37 doi: 10.1002/(ISSN)1099-1239 [59] Gershon E, Limebeer D J N, Shaked U, Yaesh I. Stochastic H∞ tracking with preview for state-multiplicative systems. IEEE Transactions on Automatic Control, 2004, 49(11):2061-2068 doi: 10.1109/TAC.2004.837534 [60] Tadmor G, Mirkin L. H∞ control and estimation with preview-part Ⅱ:fixed-size ARE solutions in discrete time. IEEE Transactions on Automatic Control, 2005, 50(1):29-40 doi: 10.1109/TAC.2004.840465 [61] Hazell A, Limebeer D J N. An efficient algorithm for discrete-time H∞ preview control. Automatica, 2008, 44(9):2441-2448 doi: 10.1016/j.automatica.2008.02.003 [62] Takaba K. Robust servomechanism with preview action for polytopic uncertain systems. International Journal of Robust and Nonlinear Control, 2000, 10(2):101-111 doi: 10.1002/(ISSN)1099-1239 [63] Liao F, Wang J L, Yang G H. LMI-based reliable robust preview tracking control against actuator faults. In:Proceedings of the 2001 American Control Conference. Arlington, VA:IEEE, 2001, 2:1047-1052 [64] Shaked U, de Souza C E. Continuous-time tracking problems in an H∞ setting:a game theory approach. IEEE Transactions on Automatic Control, 1995, 40(5):841-852 doi: 10.1109/9.384218 [65] Gershon E, Shaked U, Yaesh I. H∞ tracking of linear continuous-time systems with stochastic uncertainties and preview. International Journal of Robust and Nonlinear Control, 2004, 14(7):607-626 doi: 10.1002/(ISSN)1099-1239 [66] de Souza C E, Shaked U, Fu M. Robust H∞ tracking:a game theory approach. International Journal of Robust and Nonlinear Control, 1995, 5(3):223-238 doi: 10.1002/(ISSN)1099-1239 [67] Mirkin L. On the H∞ fixed-lag smoothing:how to exploit the information preview. Automatica, 2003, 39(8):1495-1504 doi: 10.1016/S0005-1098(03)00141-9 [68] Tadmor G, Mirkin L. H∞ control and estimation with preview-part Ⅰ:matrix ARE solutions in continuous time. IEEE Transactions on Automatic Control, 2005, 50(1):19-28 doi: 10.1109/TAC.2004.840460 [69] Kojima A, Ishijima S. H∞ preview tracking in output feedback setting. In:Proceedings of the 38th IEEE Conference on Decision and Control. Phoenix, Arizona, USA:IEEE, 1999. 3162-3164 [70] Kojima A, Ishijima S. H∞ preview control in infinite-horizon time setting. Transactions of the Society of Instrument and Control Engineers, 1999, 35(1):77-84 doi: 10.9746/sicetr1965.35.77 [71] Mianzo L, Peng H. A unified Hamiltonian approach for LQ and H∞ preview control algorithms. Journal of Dynamic Systems, Measurement, and Control, 1999, 121(3):365-369 doi: 10.1115/1.2802483 [72] Kojima A, Ishijima S. H∞ performance of preview control systems. Automatica, 2003, 39(4):693-701 doi: 10.1016/S0005-1098(02)00286-8 [73] Kojima A, Ishijima S. Formulas on preview and delayed H∞ control. IEEE Transactions on Automatic Control, 2006, 51(12):1920-1937 doi: 10.1109/TAC.2006.886485 [74] Kojima A. Generalized preview and delayed H∞ control:output feedback case. In:Proceedings of the 44th IEEE Conference on Decision Control. Seville, Spain:IEEE, 2005. 5770-5775 [75] Kojima A. H∞ controller design for preview and delayed systems. IEEE Transactions on Automatic Control, 2015, 60(2):404-419 doi: 10.1109/TAC.2014.2354911 [76] Katoh H. H∞-optimal preview controller and its performance limit. IEEE Transactions on Automatic Control, 2004, 49(11):2011-2017 doi: 10.1109/TAC.2004.837554 [77] Middleton R H, Chen J, Freudenberg J S. Tracking sensitivity and achievable H∞ performance in preview control. Automatica, 2004, 40(8):1297-1306 doi: 10.1016/j.automatica.2004.02.019 [78] Wang Z S, Wang D B, Zhen Z Y. Primary exploration of nonlinear information fusion control theory. Science in China Series F:Information Sciences, 2007, 50(5):686-696 doi: 10.1007/s11432-007-0049-y [79] 王志胜.非线性离散系统的信息融合最优预见控制.控制与决策, 2008, 23(4):397-402 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200804007.htmWang Zhi-Sheng. Information fusion optimal preview control for nonlinear discrete system. Control and Decision, 2008, 23(4):397-402 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200804007.htm [80] 王志胜.时滞非线性离散动态系统最优控制的信息融合估计方法.控制理论与应用, 2008, 25(3):538-542 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200803029.htmWang Zhi-Sheng. Optimal control for time-delayed nonlinear discrete system based on IFE method. Control Theory and Applications, 2008, 25(3):538-542 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200803029.htm [81] 胡洲, 王志胜, 甄子洋.带输入饱和的欠驱动吊车非线性信息融合控制.自动化学报, 2014, 40(7):1522-1527 http://www.aas.net.cn/CN/abstract/abstract18422.shtmlHu Zhou, Wang Zhi-Sheng, Zhen Zi-Yang. Nonlinear information fusion control for underactuated cranes with input saturation. Acta Automatica Sinica, 2014, 40(7):1522-1527 http://www.aas.net.cn/CN/abstract/abstract18422.shtml [82] 胡洲, 王志胜.一类非线性离散系统的鲁棒信息融合控制.信息与控制, 2014, 43(5):578-582 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201405013.htmHu Zhou, Wang Zhi-Sheng. Robust information fusion control for a class of nonlinear discrete-time systems. Information and Control, 2014, 43(5):578-582 http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201405013.htm [83] Zhen Z Y, Jiang J, Wang Z S, Wang X H. Information fusion based decoupling control for multivariable nonlinear system. Mathematical Problems in Engineering, 2015, 2015:Article ID 361581 [84] 廖福成, 任祯琴.基于控制系统直接方法的非线性系统预见控制器设计.控制与决策, 2013, 28(11):1679-1684 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311013.htmLiao Fu-Cheng, Ren Zhen-Qin. Design of a preview controller for nonlinear systems based on the control system directly method. Control and Decision, 2013, 28(11):1679-1684 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311013.htm [85] Tomizuka M. "Optimal linear preview control with application to vehicle suspension" -revisited. Journal of Dynamic Systems, Measurement, and Control, 1976, 98(3):309-315 doi: 10.1115/1.3427040 [86] Prokop G, Sharp R S. Performance enhancement of limited-bandwidth active automotive suspensions by road preview. IEE Proceedings -Control Theory and Applications, 1995, 142(2):140-148 doi: 10.1049/ip-cta:19951772 [87] 刘少军, 钟掘, 郭淑娟, 末松良一.最优预见控制设计及在汽车主动悬架控制中的应用.中南工业大学学报, 1997, 28(2):174-177 http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD702.019.htmLiu Shao-Jun, Zhong Jue, Guo Shu-Juan, Suematu Yoshikazo. Design of optimal preview control and its application to active control suspension. Journal of Central South University of Technology, 1997, 28(2):174-177 http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD702.019.htm [88] 朱浩, 刘少军, 邱显焱.车辆主动悬挂最优预见控制模型.交通运输工程学报, 2005, 5(3):8-13 http://www.cnki.com.cn/Article/CJFDTOTAL-JYGC200503002.htmZhu Hao, Liu Shao-Jun, Qiu Xian-Yan. Optimum-preview control model of rail vehicle active suspension. Journal of Traffic and Transportation Engineering, 2005, 5(3):8-13 http://www.cnki.com.cn/Article/CJFDTOTAL-JYGC200503002.htm [89] Hć A. Optimal linear preview control of active vehicle suspension. Vehicle System Dynamics, 1992, 21(1):167-195 doi: 10.1080/00423119208969008 [90] Marzbanrad J, Ahmadi G, Hojjat Y, Zohoor H. Optimal active control of vehicle suspension system including time delay and preview for rough roads. Journal of Vibration and Control, 2002, 8(7):967-991 doi: 10.1177/107754602029586 [91] Marzbanrad J, Hojjat Y, Zohoor H, Nikravesh S K. Optimal preview control design of an active suspension based on a full car model. Scientia Iranica, 2003, 10:23-36 http://en.journals.sid.ir/Supporting.aspx?ID=95877 [92] Marzbanrad J, Ahmadi G, Zohoor H, Hojjat Y. Stochastic optimal preview control of a vehicle suspension. Journal of Sound and Vibration, 2004, 275(3-5):973-990 doi: 10.1016/S0022-460X(03)00812-5 [93] Roh H S, Park Y. Stochastic optimal preview control of an active vehicle suspension. Journal of Sound and Vibration, 1999, 220(2):313-330 doi: 10.1006/jsvi.1998.1935 [94] Elmadany M, Abduljabbar Z, Foda M. Optimal preview control of active suspensions with integral constraint. Journal of Vibration and Control, 2003, 9(12):1377-1400 doi: 10.1177/107754603031167 [95] Thompson A G, Davis B R. Computation of the RMS state variables and control forces in a half-car model with preview active suspension using spectral decomposition methods. Journal of Sound and Vibration, 2005, 285(3):571-583 doi: 10.1016/j.jsv.2004.08.017 [96] Rao L V V, Narayanan S. Preview control of random response of a half-car vehicle model traversing rough road. Journal of Sound and Vibration, 2008, 310(1-2):352-365 doi: 10.1016/j.jsv.2007.08.004 [97] Prabakar R S, Sujatha C, Narayanan S. Optimal semi-active preview control response of a half car vehicle model with magnetorheological damper. Journal of Sound and Vibration, 2009, 326(3-5):400-420 doi: 10.1016/j.jsv.2009.05.032 [98] Yu F, Zhang J W, Crolla D A. A study of a Kalman filter active vehicle suspension system using correlation of front and rear wheel road inputs. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2000, 214(5):493-502 doi: 10.1243/0954407001527781 [99] Xie Z C, Wong P K, Huang X Z, Wong H C. Design of an active vehicle suspension based on an enhanced PID control with wheelbase preview and tuning using genetic algorithm. Journal of the Chinese Society of Mechanical Engineers, 2012, 33:103-112 https://www.researchgate.net/publication/298609589_Design_of_an_Active_Vehicle_Suspension_Based_on_an_Enhanced_PID_Control_with_Wheelbase_Preview_and_Tuning_Using_Genetic_Algorithm [100] Zhang X, Zhang J W. Performance analysis of limited bandwidth active suspension with preview based on a discrete time model. WSEAS Transactions on Systems, 2010, 9(8):834-843 https://www.researchgate.net/publication/229045589_Performance_analysis_of_limited_bandwidth_active_suspension_with_preview_based_on_a_discrete_time_model [101] Li P S, Lam J, Cheung K C. Multi-objective control for active vehicle suspension with wheelbase preview. Journal of Sound and Vibration, 2014, 333(21):5269-5282 doi: 10.1016/j.jsv.2014.06.017 [102] Hać A, Youn I. Optimal semi-active suspension with preview based on a quarter car model. Journal of Vibration and Acoustics, 1992, 114(1):84-92 doi: 10.1115/1.2930239 [103] Hać A, Youn I. Optimal design of active and semi-active suspensions including time delays and preview. Journal of Vibration and Acoustics, 1993, 115(4):498-508 doi: 10.1115/1.2930378 [104] Soliman A, Da C. Preview control of a semi-active suspension system. International Journal of Vehicle Design, 1996, 17(4):384-396 doi: 10.1504/IJVD.1996.061967 [105] Gordon T J, Sharp R S. On improving the performance of automotive semi-active suspension systems through road preview. Journal of Sound and Vibration, 1998, 217(1):163-182 doi: 10.1006/jsvi.1998.1766 [106] Xie Z C, Wong P K, Zhao J, Xu T, Wong K I, Wong H C. A noise-insensitive semi-active air suspension for heavy-duty vehicles with an integrated fuzzy-wheelbase preview control. Mathematical Problems in Engineering, 2013, 2013:Article ID 121953 [107] 吴海, 徐进学, 于锡纯, 徐心和. CNC机床伺服系统的学习预见控制研究.控制与决策, 1998, 13(增刊):479-483 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC8S1.018.htmWu Hai, Xu Jin-Xue, Yu Xi-Chun, Xu Xin-He. Iterative learning preview control for CNC machine tools servomechanism. Control and Decision, 1998, 13(S1):479-483 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC8S1.018.htm [108] 谭跃钢.位置伺服系统外干扰的一种预见补偿算法.控制理论与应用, 1997, 14(1):122-126 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199701020.htmTan Yue-Gang. A preview compensating algorithm of external-disturbances of the position servo system. Control Theory and Applications, 1997, 14(1):122-126 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY199701020.htm [109] 黄世涛, 冯之敬.精密直线伺服装置数字预见控制器设计.机床与液压, 2007, 35(3):25-27 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY200703008.htmHuang Shi-Tao, Feng Zhi-Jing. Digital preview controller design for precision linear servo device. Machine Tool and Hydraulics, 2007, 35(3):25-27 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY200703008.htm [110] Egami T, Tsuchiya T. Disturbance suppression control with preview action of linear DC brushless motor. IEEE Transactions on Industrial Electronics, 1995, 42(5):494-500 doi: 10.1109/41.464612 [111] 李丽娜, 孙宏昌, 阿曼, 戴怡, 牛志刚.基于预见控制功能的直线伺服电机冲击振动故障分析与对策研究.机床与液压, 2011, 39(17):135-137 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201117042.htmLi Li-Na, Sun Hong-Chang, A Man, Dai Yi, Niu Zhi-Gang. Method study and failure analysis on impact and vibration of linear servo motor based on preview control function. Machine Tool and Hydraulics, 2011, 39(17):135-137 http://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201117042.htm [112] Negm M M, Mantawy A H, Shwehdi M H. A global ANN algorithm for induction motor based on optimal preview control theory. In:Proceedings of the 2003 IEEE Bologna Power Tech Conference. Bologna, Italy:IEEE, 2003, 2:1-7 [113] Negm M M, Bakhashwain J M, Shwehdi M H. Speed control of a three-phase induction motor based on robust optimal preview control theory. IEEE Transactions on Energy Conversion, 2006, 21(1):77-84 doi: 10.1109/TEC.2005.858072 [114] Tsuchiya T, Shinada K, Abe S, Egami T. Robot trajectory control by preview control and adaptive control. In:Proceedings of the 1988 IEEE Workshop on Intelligent Robots. Tokyo, Japan:IEEE, 1988. 125-130 [115] 张晓梅, 王占林.机器人预见控制方法的研究.北京航空航天大学学报, 1996, 22(1):21-26 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK601.005.htmZhang Xiao-Mei, Wang Zhan-Lin. Research of preview control method on robot. Journal of Beijing University of Aeronautics and Astronautics, 1996, 22(1):21-26 http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK601.005.htm [116] Kadakkal V, Cook G. Use of a preview control scheme with knowledge of future trajectory information for a lane tracking controller on a wheeled mobile robot. In:Proceedings of the 34th Annual Conference of IEEE on Industrial Electronics. Orlando, FL:IEEE, 2008. 1692-1697 [117] Kajita S, Kanehiro F, Kaneko K, Fujiwara K, Harada K, Yokoi K, Hirukawa H. Biped walking pattern generation by using preview control of zero-moment point. In:Proceedings of the 2003 IEEE International Conference on Robotics and Automation. Taipei, China:IEEE, 2003, 2:1620-1626 [118] Nishiwaki K, Kagami S. High frequency walking pattern generation based on preview control of ZMP. In:Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL:IEEE, 2007. 2667-2672 [119] Nishiwaki K, Kagami S. Simultaneous planning of CoM and ZMP based on the preview control method for online walking control. In:Proceedings of the 11th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Bled, Slovenia:IEEE, 2011. 745-751 [120] Shimmyo S, Sato T, Ohnishi K. Biped walking pattern generation by using preview control based on three-mass model. IEEE Transactions on Industrial Electronics, 2013, 60(11):5137-5147 doi: 10.1109/TIE.2012.2221111 [121] Audren H, Vaillant J, Kheddar A, Escande A, Kaneko K, Yoshida E. Model preview control in multi-contact motion-application to a humanoid robot. In:Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, USA:IEEE, 2014. 4030-4035 [122] 李冬梅, 胡恒章.一般型最优有限预见控制及其在地形跟踪中的应用研究.控制与决策, 2001, 16(S1):652-656 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC2001S1002.htmLi Dong-Mei, Hu Heng-Zhang. General optimal finite preview control and its application to terrain following system. Control and Decision, 2001, 16(S1):652-656 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC2001S1002.htm [123] Li D M, Zhou D, Hu Z K, Hu H Z. Optimal preview control applied to terrain following flight. In:Proceedings of the 40th IEEE Conference on Decision and Control. Orlando, Florida, USA:IEEE, 2001. 211-216 [124] 宋建梅, 陈素芳.远程导弹鲁棒最优预见伺服地形跟踪控制器设计.北京理工大学学报, 2005, 25(8):663-666 http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG200508001.htmSong Jian-Mei, Chen Su-Fang. Terrain-following controller by robust optimal preview servo method for a certain long-range missile. Transactions of Beijing Institute of Technology, 2005, 25(8):663-666 http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG200508001.htm [125] Farooq A, Limebeer D J N. Path following of optimal trajectories using preview control. In:Proceedings of the 44th IEEE Conference on Decision and Control and the European Control Conference. Seville, Spain:IEEE, 2005. 2787-2792 [126] Wang Y, Zhu Z T, Zhang L, Peng C. Preview tracking control of flexible missile. In:Proceedings of the 30th Chinese Control Conference. Yantai, China:IEEE, 2011. 4503-4508 [127] Pu H Z, Zhen Z Y, Xia M. Flight control system of unmanned aerial vehicle. Transactions of Nanjing University of Aeronautics and Astronautics, 2015, 32(1):1-8 http://www.cqvip.com/QK/85388X/201501/664237029.html [128] Zhen Z Y, Wang D B, Kang Q. UAV flight trajectory control based on information fusion control method. In:Proceedings of the 2010 International Conference on Networking, Sensing and Control. Chicago, IL:IEEE, 2010. 337-341 [129] Tokutake H, Okada S, Sunada S. Disturbance preview controller and its application to a small UAV. Transactions of the Japan Society for Aeronautical and Space Sciences, 2012, 55(1):76-78 doi: 10.2322/tjsass.55.76 [130] Hess R A, Chan K. Preview control pilot model for near-earth maneuvering helicopter flight. Journal of Guidance, Control, and Dynamics, 1988, 11(2):146-152 doi: 10.2514/3.20284 [131] Hazawa K, Shin J, Fujiwara D, Igarashr K, Fernando D, Nonami K. Autonomous flight control of hobby-class small unmanned helicopter:trajectory following control by using preview control considering heading direction. In:Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems. Sendai, Japan:IEEE, 2004, 1:754-760 [132] Liborio G, Paulino N, Cunha R, Silvestre C, Ribeiro M I. Terrain following preview controller for model-scale helicopters. In:Proceedings of the 11th International Conference on Advanced Robotics. Coimbra, Portugal, 2003. 1227-1232 [133] Paulino N, Silvestre C, Cunha R. Affine parameter-dependent preview control for rotorcraft terrain following flight. Journal of Guidance, Control, and Dynamics, 2006, 29(6):1350-1359 doi: 10.2514/1.19341 [134] Cunha R, Antunes D J G T, Gomes P, Silvestre C J. A path-following preview controller for autonomous air vehicles. In:Proceedings of the 2006 AIAA Guidance, Navigation, and Control Conference. Keystone, Colorado:AIAA, 2006, 6715:1-21 [135] 沈炯, 金林, 陈来九.火电单元机组负荷最优预见控制系统仿真研究.中国电机工程学报, 1999, 19(3):14-17, 54 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC903.003.htmShen Jiong, Jin Lin, Chen Lai-Jiu. Simulating study on load preview control system of a thermal power unit. Proceedings of the CSEE, 1999, 19(3):14-17, 54 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC903.003.htm [136] 李益国, 沈炯, 王培红, 韩宇, 吕震中.基于单向解耦的火电机组负荷最优预见控制方法.动力工程, 2004, 24(5):664-668 http://www.cnki.com.cn/Article/CJFDTOTAL-DONG200405012.htmLi Yi-Guo, Shen Jiong, Wang Pei-Hong, Han Yu, Lv Zhen-Zhong. Load preview control method of thermal power unit based on unidirectional decoupling. Power Engineering, 2004, 24(5):664-668 http://www.cnki.com.cn/Article/CJFDTOTAL-DONG200405012.htm [137] 李益国, 沈炯, 吕震中.基于LMI的鲁棒负荷预见控制方法.中国电机工程学报, 2003, 23(12):213-217 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC200312040.htmLi Yi-Guo, Shen Jiong, Lv Zhen-Zhong. A study on robust load preview control method via LMI. Proceedings of the CSEE, 2003, 23(12):213-217 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC200312040.htm [138] 李益国, 沈炯, 薛景岩, 吕震中.火电机组负荷多模型鲁棒预见控制方法.热能动力工程, 2004, 19(2):186-190 http://www.cnki.com.cn/Article/CJFDTOTAL-RNWS200402021.htmLi Yi-Guo, Shen Jiong, Xue Jing-Yan, Lv Zhen-Zhong. Multi-model robust forecast control of thermal power plant loads. Journal of Engineering for Thermal Energy and Power, 2004, 19(2):186-190 http://www.cnki.com.cn/Article/CJFDTOTAL-RNWS200402021.htm [139] Laks J H, Pao L Y, Wright A D. Control of wind turbines:past, present, and future. In:Proceedings of the 2009 American Control Conference. Saint Louis, MO:IEEE, 2009. 2096-2103 [140] Dunne F, Pao L Y, Wright A D, Jonkman B, Kelley N, Simley E. Adding feedforward blade pitch control for load mitigation in wind turbines:non-causal series expansion, preview control, and optimized FIR filter methods. In:Proceedings of the 49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace. Orlando, Florida, USA:AIAA, 2011. 1-17 [141] Laks J, Pao L Y, Wright A, Kelley N, Jonkman B. Blade pitch control with preview wind measurements. In:Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace. Orlando, Florida, USA:AIAA, 2010. 1-24 [142] Ozdemir A A, Seiler P, Balas G J. Design tradeoffs of wind turbine preview control. IEEE Transactions on Control Systems Technology, 2013, 21(4):1143-1154 doi: 10.1109/TCST.2013.2261069 [143] Laks J, Pao L, Wright A, Kelley N, Jonkman B. The use of preview wind measurements for blade pitch control. Mechatronics, 2011, 21(4):668-681 doi: 10.1016/j.mechatronics.2011.02.003 [144] Wang N, Johnson K E, Wright A D. FX-RLS-based feedforward control for LIDAR-enabled wind turbine load mitigation. IEEE Transactions on Control Systems Technology, 2012, 20(5):1212-1222 doi: 10.1109/TCST.2011.2163515 [145] Kristalny M, Madjidian D, Knudsen T. On using wind speed preview to reduce wind turbine tower oscillations. IEEE Transactions on Control Systems Technology, 2013, 21(4):1191-1198 doi: 10.1109/TCST.2013.2261070 [146] Mianzo L, Peng H. Output feedback H∞ preview control of an electromechanical valve actuator. IEEE Transactions on Control Systems Technology, 2007, 15(3):428-437 doi: 10.1109/TCST.2007.894635 [147] Salton A T, Chen Z Y, Zheng J C, Fu M Y. Preview control of dual-stage actuator systems for superfast transition time. IEEE/ASME Transactions on Mechatronics, 2011, 16(4):758-763 doi: 10.1109/TMECH.2010.2053851 [148] Wang L, Zheng J C, Fu M Y. Optimal preview control of a dual-stage actuator system for triangular reference tracking. IEEE Transactions on Control Systems Technology, 2014, 22(6):2408-2416 doi: 10.1109/TCST.2014.2301823 [149] Wang D, Aida K. Research on fuzzy I-PD preview control for nonlinear system. JSME International Journal Series C:Mechanical Systems, Machine Elements, and Manufacturing, 2003, 46(3):1042-1050 doi: 10.1299/jsmec.46.1042 [150] Silvestre C, Cunha R, Paulino N, Pascoal A. A bottom-following preview controller for autonomous underwater vehicles. IEEE Transactions on Control Systems Technology, 2009, 17(2):257-266 doi: 10.1109/TCST.2008.922560 [151] Saleh L, Chevrel P, Claveau F, Lafay J F, Mars F. Shared steering control between a driver and an automation:stability in the presence of driver behavior uncertainty. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2):974-983 doi: 10.1109/TITS.2013.2248363 [152] Hosokawa T, Mori Y. Design of preview sliding mode control for an wideband speaker system. In:Proceedings of the 2008 SICE Annual Conference. Tokyo, Japan:IEEE, 2008. 2345-2348 [153] Running K D, Martins N C. Optimal preview control of Markovian jump linear systems. IEEE Transactions on Automatic Control, 2009, 54(9):2260-2266 doi: 10.1109/TAC.2009.2026860 [154] Zhang C, Vahidi A. Route preview in energy management of plug-in hybrid vehicles. IEEE Transactions on Control Systems Technology, 2012, 20(2):546-553 doi: 10.1109/TCST.2011.2115242 [155] Zhang H, Shi Y, Mu B X. Optimal H∞-based linear-quadratic regulator tracking control for discrete-time Takagi-Sugeno fuzzy systems with preview actions. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(4):044501 doi: 10.1115/1.4024007 [156] Cole M O T, Wongratanaphisan T. Optimal LQ feedforward tracking with preview:practical design for rigid body motion control. Control Engineering Practice, 2014, 26:41-50 doi: 10.1016/j.conengprac.2013.12.007 [157] Gershon E, Shaked U. H∞ preview tracking control of retarded state-multiplicative stochastic systems. International Journal of Robust and Nonlinear Control, 2014, 24(15):2119-2135 doi: 10.1002/rnc.v24.15 [158] Liao F C, Ren Z Q, Tomizuka M, Wu J. Preview control for impulse-free continuous-time descriptor systems. International Journal of Control, 2015, 88(6):1142-1149 doi: 10.1080/00207179.2014.996769 [159] Zhang W L, Bae J, Tomizuka M. Modified preview control for a wireless tracking control system with packet loss. IEEE/ASME Transactions on Mechatronics, 2015, 20(1):299-307 doi: 10.1109/TMECH.2013.2297151 [160] 吴海, 宗鸣, 于锡存, 徐心和.一类跟踪系统的预见预测控制算法的研究.控制理论与应用, 2001, 18(4):534-538 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200104012.htmWu Hai, Zong Ming, Yu Xi-Cun, Xu Xin-He. Preview predictive control for a class of following systems. Control Theory and Applications, 2001, 18(4):534-538 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200104012.htm [161] Ordys A W, Tomizuka M, Grimble M J. State-space dynamic performance preview-predictive controller. Journal of Dynamic Systems, Measurement, and Control, 2007, 129(2):144-153 doi: 10.1115/1.2431810 [162] de Bruyne S, van der Auweraer H, Anthonis J, Desmet W, Swevers J. Preview control of a constrained hydraulic active suspension system. In:Proceedings of the 51st IEEE Annual Conference on Decision and Control. Maui, HI:IEEE, 2012. 4400-4405 -

 下载:
下载:

图(7)
计量
- 文章访问数: 4294
- HTML全文浏览量: 494
- PDF下载量: 2275
- 被引次数: 0
