

Function Projective Synchronization of Two Fractional-order Complex Dynamical Networks
-
摘要: 复杂网络的同步问题是复杂网络研究的热点之一, 本文研究了两个分数阶复杂网络间的函数投影同步问题.分别针对网络模型参数已知和参数未知两种情况, 利用自适应控制技术和分数阶系统稳定性理论, 设计自适应控制器, 使两个分数阶复杂动态网络实现函数投影同步.最后利用数值仿真验证所提出方法的有效性.Abstract: Synchronization is one of the hot topics in the investigation of complex dynamical networks. Two fractional-order complex dynamical networks with known parameters and unknown parameters are respectively investigated in this paper. Based on the adaptive control technique and stability theory of fractional-order differential system, an adaptive controller is designed for each case. Numerical examples are provided to show the effectiveness of the proposed methods.
-
复杂网络广泛存在于各种自然现象中, 如万维网、生态网、神经网络、电力网络、城市交通网、社会关系网络等[1], 并且许多实际问题都可以抽象为复杂网络模型进行研究, 如博弈、疾病传播[2-4]等.因此, 复杂网络是一个多学科交叉的热点研究领域, 并在Watts等[5]发现复杂网络的小世界特征及Barabási等[6]发现复杂网络的无标度特征后, 引起学者们的广泛关注[7-8].
复杂网络同步是复杂网络动力学行为中最普遍的现象之一, 其指网络中所有节点的状态按照某种方式趋于一致.如完全同步是指所有的网络节点都趋近于相同的状态; 相位同步是指所有网络节点的相位都会被锁定, 但它们的幅值可能彼此之间相差悬殊[1].网络同步机制能解释很多自然现象, 如在Internet和WWW上信息的同步交换、通信网络中的数字或模拟信号的同步交换等, 所以复杂网络同步问题是复杂网络研究的热点之一.目前, 许多学者在复杂网络同步这一领域取得了大量的研究成果.Pecora等[9]基于线性耦合的网络研究了网络系统同步的稳定性问题, 并获得了主稳定函数判据.Wang等[10]将牵制控制策略应用到无标度网络控制.Lv等[11]研究了一类具有时变时滞的复杂网络同步问题.文献[12]研究了时延复杂网络的自适应周期间歇同步控制问题.文献[13]研究了复杂网络同步态与孤立节点解的关系.文献[14]针对节点扩张的时滞复杂网络系统, 在节点扩张的条件下, 研究该类系统的同步保性能控制问题.文献[15]对具有相似节点的耦合时滞复杂网络的稳定性与同步控制进行了分析.文献[16]研究了具有不同维数非线性节点的非线性耦合复杂动态网络的同步方法.
目前, 大多数关于复杂网络同步的理论结果主要集中在复杂网络各结点的动力学行为恒同的完全同步上.考虑到网络信息安全是现代信息化社会的一个难题, 而利用函数投影同步进行保密通信可进一步增加信息的安全性, 因此在复杂网络中研究函数投影同步理论具有重要的理论意义和实际应用价值.函数投影同步是指驱动系统和响应系统的状态按一个给定的尺度函数达到同步.由于函数投影同步在同步的混沌系统中引入了尺度函数, 其使同步后的混沌系统的复杂程度及混沌程度增加, 根据密码学原理, 复杂度越大, 系统越难破译, 因此利用函数投影同步进行保密通信可进一步增加信息的安全性, 因此该种同步的研究具有重要的理论意义和实际应用价值.文献[17]给出函数投影同步的定义, 并分别针对混沌Lü系统和超混沌Lü系统的耦合系统, 采用反步法给出达到函数投影同步的控制器设计方法.文献[18]基于自适应控制的方法, 针对一类模型参数未知的混沌系统, 给出了实现函数投影同步的控制器设计方法及未知参数的估计方法. Lee等[19]研究了Chen-Lee混沌系统实现广义函数投影同步的方法, 并用实际电路模拟了该系统.文献[20]基于鲁棒控制法研究了带有不确定参数的混沌系统的函数投影同步问题.文献[21]研究分数阶混沌系统的函数投影同步问题.文献[22]研究改进函数投影同步问题.
复杂网络中的函数投影同步问题首先被Zhang等[23]研究, 其在部分线性化的驱动-响应动态网络中实现了函数投影同步.文献[24]研究具有不同混沌节点的复杂网络函数投影同步问题, 并提出一种新的复杂网络同步方法即自适应开环加闭环控制方法, 与传统的开环加闭环控制法相比, 新方法不需要去计算Jacobian矩阵及选择Hurwitz矩阵, 且其闭环控制部分的反馈增益可自适应调整到一个合适的常数.文献[25]利用鲁棒控制法研究驱动-响应动态网络中的改进函数投影同步问题.文献[26]研究具有不同混沌节点的驱动-响应动态网络改进函数投影同步的实现方法.文献[27]研究两个复杂网络间的广义函数投影同步问题.文献[28]研究带有时滞的复杂网络实现函数投影同步的方法.
虽然目前已有一些关于复杂动态网络函数投影同步的研究成果, 但是这些成果都是基于整数阶复杂网络模型获得的, 即节点的数学模型用整数阶微分方程描述.但在现实中, 许多物理系统展现出分数阶动力学行为, 如分数阶Chua电路[29]、分数阶Lorenz系统[30]、分数阶Chen系统[31]及分数阶混沌及超混沌Rössler系统[32]等.实际上整数阶微积分是实际物理系统的理想化处理, 分数阶系统更具有普遍性, 因此对网络节点为分数阶系统的研究引起了越来越多研究者的兴趣.文献[33]研究分数阶复杂网络的完全同步和反同步问题.文献[34]研究分数阶李亚普诺夫稳定性理论及其在复杂网络同步中的应用.文献[35]研究带未知参数的分数阶驱动-响应动态网络的完全同步方法.
考虑到目前对于分数阶复杂网络的函数投影同步问题鲜有研究.本文分别基于网络模型参数已知和未知两种情况, 利用自适应控制技术和分数阶系统稳定性理论, 设计自适应控制器使两个分数阶复杂动态网络实现函数投影同步.本文的内容安排如下:第1节给出模型描述和函数投影同步的定义; 第2节分别在系统模型参数已知和未知两种条件下, 给出两个分数阶复杂动态网络实现函数投影同步的控制器设计方法; 第3节给出两组仿真实例验证所提控制方法的有效性; 第4节给出结论.
1. 模型描述
本节首先对分数阶微分的定义进行介绍.分数阶微分常用的定义有两种:Riemann-Liouville定义和Caputo定义.下面分别给出这两种定义.
函数 $f(t)$ 的 $q$ 阶Riemann-Liouville分数阶微分定义为[36]
$ \begin{array}{l}{}_{a}D_{t}^{q}f(t)=\dfrac{1}{\Gamma (n-q)}\dfrac{{{\rm d}^{n}}}{{\rm d}{{t}^{n}}} \displaystyle\int_{a}^{t}{\dfrac{f(\tau)}{{{(t-\tau )}^{q-n+1}}}{\rm d}\tau }\end{array} $
其中, $n-1<q<n, \ n\in \mathbf{N}$ , $\Gamma (\cdot )$ 是Gamma函数.
函数 $f(t)$ 的 $q$ 阶Caputo分数阶微分定义为[35]
$ \begin{array}{l}_{a}D_{t}^{q}f(t)=\dfrac{1}{\Gamma(n-q)}\displaystyle\int_{a}^{t}{{{(t-\tau)}^{-q+n-1}}{{f}^{(n)}}(\tau ){\rm d}\tau }\end{array} $
其中, $n-1 < q<n, \ n\in \mathbf{N}$ , ${{f}^{(n)}}(\tau )$ 是函数 $f(\tau)$ 的 $n$ 阶导数, $\Gamma (\cdot )$ 是Gamma函数.
$\Gamma (\cdot )$ 定义为
$ \begin{align*}\Gamma (s)=\int_{0}^{\infty }{{{t}^{s-1}}{{\rm e}^{-t}}}{\rm d}t\end{align*} $
Caputo分数阶微分是先求导再积分, 其更适合描述分数阶微分方程的初值问题, 因此本文采用Caputo定义.当 $a=0$ 时, 我们用简化的符号 $D_{*}^{q}$ 代表符号 ${}_{0}D_{t}^{q}$ .
下面我们基于Caputo定义, 给出一个由N个节点组成的分数阶复杂动态网络模型
$\begin{align}\begin{array}{l}D_{*}^{q}{{\pmb x}_{i}}= f({{{\pmb x}_{i}}})+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{{\pmb x}_{j}}}}, \ i=1, \cdots, N\end{array}\end{align}$
(1) 其中, ${{\pmb x}_{i}}= {\left[{{x_{i1}}\;{x_{i2}}\; \cdots {x_{in}}} \right]^{\rm{T}}} \in {{\mathbf{R}}^n}$ 是第 $i$ 个节点的状态向量, $f:{\mathbf{R}^{n}}\to {{\bf R}^{n}}$ 是确定节点动态行为的连续可微向量函数, $0 < q\le1$ 是分数阶数. $C\in {\mathbf{R}^{n\times n}}$ 为内部耦合矩阵. $G=({{g}_{ij}})\in {\mathbf{R}^{N\times N}}$ 是表示网络拓扑结构的耦合矩阵, 其中 ${{g}_{ij}}$ 被定义如下:如果节点 $i$ 和节点 $j$ 之间有连接 $(i\ne j)$ , 则 ${{g}_{ij}}>0$ ; 否则, ${{g}_{ij}}={{g}_{ji}}=0$ , 并且矩阵 $G$ 的对角线上的元素满足耗散条件
$\begin{align}\begin{array}{l}{{g}_{ii}}=-\sum\limits_{j=1, j\ne i}^{N}{{g}_{ij}}, \ \ i=1, 2, \cdots, N \end{array}\end{align}$
(2) 取式 (1) 作为驱动网络, 带有非线性控制器的响应网络按下等式选取
$\begin{align}\begin{array}{l}D_{*}^{q}{{\pmb y}_{i}}= f({{\pmb y}_{i}})+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb y}_{j}}}+{{\pmb u}_{i}}, \ \ \ i=1, \cdots, N \end{array}\end{align}$
(3) 其中, ${{\pmb y}_{i}}= {\left[{{y_{i1}}\;{y_{i2}}\; \cdots {y_{in}}} \right]^{\rm{T}}} \in {{\mathbf{R}}^n}$ 是响应网络中第 $i$ 个节点的状态向量, ${{\pmb u}_{i}}\in{\mathbf{R}^{n}}$ 是控制器.
定义误差向量为
$\begin{align}\begin{array}{l}{{\pmb e}_{i}}={{\pmb y}_{i}}-\alpha (t){{\pmb x}_{i}} \end{array}\end{align}$
(4) 其中, 误差向量 ${{\pmb e}_{i}}={{\left[{{e}_{i1}}\;{e_{i2}} \cdots \;{{e}_{in}} \right]}^{\rm T}}\in {\mathbf{R}^{n}}$ , $\alpha(t)$ 是一个连续可微的尺度函数.
定义 1.对于驱动网络 (1) 和响应网络 (3), 如果存在一个连续可微的尺度函数 $\alpha (t)$ 使得 $\lim \nolimits_{t\to\infty } \left\| {{\pmb e}_{i}}(t) \right\|=\lim\nolimits_{t\to\infty } \left\| {{\pmb y}_{i}}(t)-\alpha (t){{\pmb x}_{i}}(t)\right\|=0$ , $i=1, 2, \cdots, N, $ 其中, $\left\| \cdot\right\|$ 代表欧几里得范数, 则称驱动网络 (1) 和响应网络 (3) 达到函数投影同步.
本文研究在复杂网络模型中系统参数已知和未知两种条件下, 如何设计控制器 ${\pmb u}_{i}$ 使驱动网络 (1) 和响应网络 (3) 实现函数投影同步.在控制器设计的过程中我们用到下述引理.
引理 1[37].考虑自治系统
$\begin{align}\begin{array}{l}D_{*}^{q}{\pmb x}=A({\pmb x}){\pmb x} \end{array}\end{align}$
(5) 其中, $q\in (0, 1]$ 是分数阶数, ${\pmb x}={{[{{x}_{1}}\ {{x}_{2}} \cdots \ {{x}_{n}}]}^{\rm T}}$ 是状态向量.如果存在一个实对称正定矩阵 $P$ 使得方程 $J({\pmb x})={{\pmb x}^{\rm T}}PD_{*}^{q}{\pmb x}\le 0$ 总成立, 则系统 (5) 渐近稳定.
2. 控制器设计
2.1 参数已知的复杂网络函数投影同步法
本节研究在复杂网络模型参数已知的条件下, 驱动网络 (1) 和响应网络 (3) 实现函数投影同步的控制器设计方法.
定理 1.对于一个给定的尺度函数 $\alpha(t)$ , 驱动网络 (1) 和响应网络 (3) 在如下控制器作用下可实现函数投影同步
$\begin{align}&\begin{array}{l} {{\pmb u}_{i}}=- f({{\pmb y}_{i}})-\alpha(t)\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb x}_{j}}}+D_{*}^{q}[\alpha(t){{\pmb x}_{i}}]-{{k}_{i}}{{\pmb e}_{i}} \end{array}\end{align}$
(6) $\begin{equation} D_{*}^{q}{{k}_{i}}={{r}_{i}}{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}} \end{equation}$
(7) 其中, ${{r}_{i}}$ 是任意的正常数.
证明.由式 (4) 有:
$\begin{align}\begin{array}{l}D_{*}^{q}{{\pmb e}_{i}}=D_{*}^{q}{{\pmb y}_{i}}-D_{*}^{q}[\alpha(t){{\pmb x}_{i}}] \end{array}\end{align}$
(8) 将式 (6) 代入式 (3) 有:
$\begin{align}& D_{*}^{q}{{\pmb y}_{i}}= f({{\pmb y}_{i}})+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb y}_{j}}}- f({{\pmb y}_{i}})+D_{*}^{q}[\alpha (t){{\pmb x}_{i}}]- \notag\\& \alpha (t)\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb x}_{j}}}-{{k}_{i}}{{\pmb e}_{i}}=\notag\\& D_{*}^{q}[\alpha (t){{\pmb x}_{i}}]+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}} \end{align}$
(9) 将式 (9) 代入式 (8) 有:
$\begin{align}\begin{array}{l}D_{*}^{q}{{\pmb e}_{i}}=\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}} \end{array}\end{align}$
(10) 定义向量 ${\pmb X}=[{\pmb e}_{1}^{\rm T}\ {\pmb e}_{2}^{\rm T} \ {\pmb e}_{N}^{\rm T}\ {{{\tilde{k}}}_{1}}/\sqrt{{{r}_{1}}}$ ${{{\tilde{k}}}_{N}}/\sqrt{{{r}_{N}}}]^{\rm T}, $ 其中 ${{\tilde{k}}_{i}}={{k}_{i}}-k_{i}^{*}$ 为控制器中反馈增益的误差.很明显由式 (10) 和式 (7) 可以很容易地写出 $D_{*}^{q}{\pmb X}=A({\pmb X}){\pmb X}$ 的表达式, 因此可以利用引理1, 研究误差动态系统的稳定性.取 $P$ 为单位阵, 根据引理1构造函数
$\begin{align}& J={{\pmb X}^{\rm T}}PD_{*}^{q}{\pmb X} =\notag\\& \sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}D_{*}^{q}{{\pmb e}_{i}}}+\sum\limits_{i=1}^{N}{{{{\tilde{k}}}_{i}}\frac{1}{{{r}_{i}}}D_{*}^{q}{{{\tilde{k}}}_{i}}}\end{align}$
(11) 将式 (10) 代入式 (11) 有:
$\begin{align}\begin{array}{l}J=\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}\left(\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}}\right)}+\sum\limits_{i=1}^{N}{{{{\tilde{k}}}_{i}}\dfrac{1}{{{r}_{i}}}D_{*}^{q}{{{\tilde{k}}}_{i}}}\end{array}\end{align}$
(12) 将式 (7) 代入式 (12) 有:
$\begin{align}&J=\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}\left( \sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}} \right)}+\notag\\&\quad \sum\limits_{i=1}^{N}{({{k}_{i}}-k_{i}^{*}){\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}}\le\notag\\& \sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{{\pmb e}_{i}^{\rm T}C{{g}_{ij}}{{\pmb e}_{j}}}}-k_{{}}^{*}\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}} \end{align}$
(13) 其中, ${{k}^{*}}=\min (k_{1}^{*}, k_{2}^{*}, \cdots, k_{N}^{*})$ .令
$ \begin{align*}&\begin{array}{l} {\pmb E}={{\left[{\pmb e}_{1}^{\rm T}\ {\pmb e}_{2}^{\rm T}\ \cdots \ \ {\pmb e}_{N}^{\rm T} \right]}^{\rm T}}\in {\mathbf{R}^{nN}}\end{array}\\&\begin{array}{l} Q=C\otimes G\in {\mathbf{R}^{nN\times nN}}\end{array}\end{align*} $
则由等式 (13) 有:
$\begin{align}&J\le{{\pmb E}^{\rm T}}Q{\pmb E}-{{k}^{*}}{{\pmb E}^{\rm T}}{\pmb E} \le\notag\\&\quad\ \ \ \left({{\lambda }_{\max }}\left(\frac{{{Q}^{\rm T}}+Q}{2}\right)-{{k}^{*}}\right){{\pmb E}^{\rm T}}{\pmb E}\end{align}$
(14) 其中, ${{\lambda }_{\max }}(\cdot )$ 代表矩阵的最大特征值.我们取
$ \begin{align*}\begin{array}{l}{{k}^{*}}={{\lambda }_{\max }}\left(\dfrac{{{Q}^{\rm T}}+Q}{2}\right)+1\end{array}\end{align*} $
则由等式 (14) 有:
$ \begin{align*}\begin{array}{l}J\le -{{\pmb E}^{\rm T}}{\pmb E}\end{array}\end{align*} $
因此根据引理1可得误差系统是渐近稳定的, 即驱动网络 (1) 和响应网络 (3) 在所设计的控制器 (6) 的作用下实现函数投影同步.在定理1中, 控制器的反馈增益 ${{k}_{i}}$ 采用自适应辨识的方法获得, 省去了额外计算反馈增益 ${{k}_{i}}$ 的麻烦.但在实际应用中若在控制器中增加参数辨识器会使控制器结构过于复杂, 有时不利于实际应用, 因此我们在下面的推论中直接给出反馈增益 ${{k}_{i}}$ 的求取方法.
推论 1.对于一个给定的尺度函数 $\alpha (t)$ , 驱动网络 (1) 和响应网络 (3) 在如下控制器作用下可实现函数投影同步
$\begin{align}\begin{array}{l}{{\pmb u}_{i}}=- f({{\pmb y}_{i}})-\alpha(t)\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb x}_{j}}}+D_{*}^{q}[\alpha(t){{\pmb x}_{i}}]-{{k}_{i}}{{\pmb e}_{i}}\end{array}\end{align}$
(15) 其中, ${{k}_{i}}>{{\lambda }_{\max }}(\frac{{{Q}^{\rm T}}+Q}{2})$ , $Q=C\otimes G\in {\mathbf{R}^{nN\times nN}}$ .
证明.根据引理1, 我们构造函数
$\begin{align}J={{\pmb E}^{\rm T}}PD_{*}^{q}{\pmb E}=\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}D_{*}^{q}{{\pmb e}_{i}}} \end{align}$
(16) 其中, ${\pmb E}={{\left[{\pmb e}_{1}^{\rm T}\ {\pmb e}_{2}^{\rm T} \cdots \ {\pmb e}_{N}^{\rm T} \right]}^{\rm T}}\in {{\bf R}^{nN}}$ .将式 (10) 代入式 (16) 有:
$\begin{align}&J=\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}\left(\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}}\right)} \le\notag\\&\quad\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{{\pmb e}_{i}^{\rm T}C{{g}_{ij}}{{\pmb e}_{j}}}}-k_{{}}^{*}\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}} \end{align}$
(17) 其中, ${{k}^{*}}=\min (k_{1}^{{}}, k_{2}^{{}}, \cdots, k_{N}^{{}})$ .令 $Q=C\otimes G\in {\mathbf{R}^{nN\times nN}}, $ 则由等式 (17) 有:
$\begin{align}&J\le{{\pmb E}^{\rm T}}Q{\pmb E}-{{k}^{*}}{{\pmb E}^{\rm T}}{\pmb E}\le\notag\\&\quad \left({{\lambda }_{\max }}\left(\frac{{{Q}^{\rm T}}+Q}{2}\right)-{{k}^{*}}\right){{\pmb E}^{\rm T}}{\pmb E}\end{align}$
(18) 由推论的条件 ${{k}_{i}}>{{\lambda }_{\max }}(\frac{{{Q}^{\rm T}}+Q}{2})$ , 易知 ${{k}^{*}}>{{\lambda }_{\max }}(\frac{{{Q}^{\rm T}}+Q}{2})$ , 因此可得 $J\le 0.$ 根据引理1可知误差系统是渐近稳定的, 即驱动网络 (1) 和响应网络 (3) 在所设计的控制器 (15) 的作用下实现函数投影同步.
2.2 带未知参数的复杂网络函数投影同步法
本节研究复杂网络模型存在未知参数时, 驱动网络和响应网络实现函数投影同步的控制器设计方法.
考虑一类带有未知参数的分数阶复杂网络模型
$\begin{align}&D_{*}^{q}{{\pmb x}_{i}}= f({{\pmb x}_{i}})+F({{\pmb x}_{i}}){\pmb\theta}+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb x}_{j}}}, \notag\\&\qquad\qquad\qquad\qquad i=1, \cdots, N \end{align}$
(19) 其中, ${{\pmb x}_{i}}= {\left[{{x_{i1}}\;{x_{i2}}\; \cdots {x_{in}}} \right]^{\rm{T}}} \in {{\mathbf{R}}^n}$ 表示第 $i$ 个节点的状态向量, $0 < q\le 1$ 是分数阶数. $ f:{{\bf R}^{n}}\to {\mathbf{R}^{n}}$ 是连续可微的向量函数. $F:{\mathbf{R}^{n}}\to{\mathbf{R}^{n\times m}}$ 是函数矩阵. ${\pmb \theta} ={{\left[{{\theta}_{1}}\ {{\theta }_{2}}\ \cdots \ {{\theta }_{m}} \right]}^{\rm T}}\in {\mathbf{R}^{m}}$ 是系统的未知参数向量. $C\in {\mathbf{R}^{n\times n}}$ 是内部耦合矩阵. $G=({{g}_{ij}})\in {\mathbf{R}^{N\times N}}$ 是表示网络拓扑结构的耦合矩阵, 其中 ${{g}_{ij}}$ 被定义如下:如果节点 $i$ 和节点 $j$ 之间有连接 $(i\ne j)$ , 则 ${{g}_{ij}}>0$ ; 否则, ${{g}_{ij}}={{g}_{ji}}=0$ , 并且矩阵 $G$ 的对角线上的元素满足耗散条件 (2).
取式 (19) 作为驱动网络, 带有非线性控制器的响应网络按下等式选取
$\begin{align}&D_{*}^{q}{{\pmb y}_{i}}= f({{\pmb y}_{i}})+F({{\pmb y}_{i}}){\pmb\theta}+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb y}_{j}}}+{{\pmb u}_{i}}, \notag\\&\qquad \qquad \qquad \qquad\qquad i=1, \cdots, N \end{align}$
(20) 其中, ${{\pmb y}_{i}}= {\left[{{y_{i1}}\;{y_{i2}}\; \cdots {y_{in}}} \right]^{\rm{T}}} \in {{\mathbf{R}}^n}$ 表示响应网络第 $i$ 个节点的状态向量, ${{\pmb u}_{i}}\in {{\bf R}^{n}}$ 是待设计的控制器.
定理 2.对于一个给定的尺度函数 $\alpha (t)$ , 带未知参数的驱动网络 (19) 和响应网络 (20) 在如下控制器和参数估计器的作用下可实现函数投影同步
$\begin{align}&{{\pmb u}_{i}}=- f({{\pmb y}_{i}})-F({{\pmb y}_{i}}){{\hat{\pmb\theta }}_{i}}-\alpha(t)\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb x}_{j}}}+\notag\end{align}$
(21) $\begin{align}D_{*}^{q}{{k}_{i}}={{r}_{i}}{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}} \end{align}$
(22) $\begin{align}D_{*}^{q}{{\hat{\pmb \theta }}_{i}}={{F}^{\rm T}}({{\pmb y}_{i}}){{\pmb e}_{i}} \end{align}$
(23) 其中, ${{\hat{\pmb \theta}}_{i}}$ 为第 $i$ 个响应节点对网络中未知参数 $\pmb \theta $ 的估值, ${{r}_{i}}$ 是任意的正常数.
证明.由式 (4) 有:
$\begin{align}D_{*}^{q}{{\pmb e}_{i}}=D_{*}^{q}{{\pmb y}_{i}}-D_{*}^{q}[\alpha(t){{\pmb x}_{i}}] \end{align}$
(24) 将式 (20) 代入式 (24) 有:
$\begin{align}&D_{*}^{q}{{\pmb e}_{i}}= f({{\pmb y}_{i}})+F({{\pmb y}_{i}}){\pmb\theta}+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb y}_{j}}}+\notag\\&\qquad {{\pmb u}_{i}}-D_{*}^{q}[\alpha (t){{\pmb x}_{i}}] \end{align}$
(25) 将式 (21) 代入式 (25) 有:
$\begin{align}D_{*}^{q}{{\pmb e}_{i}}=F({{\pmb y}_{i}})({\pmb \theta}-{{\hat{{\pmb \theta}}}_{i}})+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}} \end{align}$
(26) 定义系统参数误差为
$\begin{align}{{\pmb e}_{{{\theta }_{i}}}}={\pmb \theta} -{{\hat{\pmb \theta}}_{i}} \end{align}$
(27) 将式 (27) 代入式 (26) 有:
$\begin{align}D_{*}^{q}{{\pmb e}_{i}}=F({{\pmb y}_{i}}){{\pmb e}_{{{\theta}_{i}}}}+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}} \end{align}$
(28) 根据引理1, 我们构造函数
$\begin{align}&J={{\pmb X}^{\rm T}}PD_{*}^{q}{\pmb X}=\notag\\&\quad \sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}D_{*}^{q}{{\pmb e}_{i}}}+\sum\limits_{i=1}^{N}{{\pmb e}_{{{\theta }_{i}}}^{\rm T}D_{*}^{q}{{\pmb e}_{{{\theta}_{i}}}}}+\sum\limits_{i=1}^{N}{{{{\tilde{k}}}_{i}}\frac{1}{{{r}_{i}}}D_{*}^{q}{{{\tilde{k}}}_{i}}}\end{align}$
(29) 其中, $\mathit{\boldsymbol{X}} = [\mathit{\boldsymbol{e}}_1^{\rm{T}}\; \cdots \;\mathit{\boldsymbol{e}}_N^{\rm{T}}\;\mathit{\boldsymbol{e}}_{{\theta _1}}^{\rm{T}}\; \cdots \;\mathit{\boldsymbol{e}}_{{\theta _N}}^{\rm{T}}\;{\tilde k_1}/\sqrt {{r_1}} \; \cdots {\{ {\tilde k_N}/\sqrt {{r_N}}]^T}$ , $P$ 取单位阵, ${{\tilde{k}}_{i}}={{k}_{i}}-k_{i}^{*}$ .
将式 (22)、(23)、(27) 和 (28) 代入式 (29) 有:
$\begin{align}&J=\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}}\left[F({{\pmb y}_{i}}){\pmb e}_{{{\theta}_{i}}}^{{}}+\sum\limits_{j=1}^{N}{C{{g}_{ij}}{{\pmb e}_{j}}}-{{k}_{i}}{{\pmb e}_{i}}\right]-\notag\\&\quad \sum\limits_{i=1}^{N}{{\pmb e}_{{{\theta }_{i}}}^{\rm T}D_{*}^{q}{{{\hat{\pmb \theta}}}_{i}}}+\sum\limits_{i=1}^{N}{({{k}_{i}}-k_{i}^{*}){\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}}=\notag\\&\quad \sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}F({{\pmb y}_{i}}){\pmb e}_{{{\theta}_{i}}}^{{}}+}\sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{{\pmb e}_{i}^{\rm T}C{{g}_{ij}}{{\pmb e}_{j}}}}-\notag\\&\quad \sum\limits_{i=1}^{N}{{\pmb e}_{{{\theta}_{i}}}^{\rm T}{{F}^{\rm T}}({{\pmb y}_{i}}){\pmb e}_{i}^{{}}}-\sum\limits_{i=1}^{N}{k_{i}^{*}{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}} \le\notag\\&\quad \sum\limits_{i=1}^{N}{\sum\limits_{j=1}^{N}{{\pmb e}_{i}^{\rm T}C{{g}_{ij}}{{\pmb e}_{j}}}}-k_{{}}^{*}\sum\limits_{i=1}^{N}{{\pmb e}_{i}^{\rm T}{{\pmb e}_{i}}} \end{align}$
(30) 其中, ${{k}^{*}}=\min (k_{1}^{*}, k_{2}^{*}, \cdots, k_{N}^{*})$ .令
$ \begin{align*}&\begin{array}{l} {\pmb E}={{\left[{\pmb e}_{1}^{\rm T}\ {\pmb e}_{2}^{\rm T}\ \cdots \ \ {\pmb e}_{N}^{\rm T} \right]}^{\rm T}}\in{\mathbf{R}^{nN}}\end{array}\\&\begin{array}{l} Q=C\otimes G\in {\mathbf{R}^{nN\times nN}}\end{array}\end{align*} $
则由等式 (30) 有:
$\begin{align}&J\le {{\pmb E}^{\rm T}}Q{\pmb E}-{{k}^{*}}{{\pmb E}^{\rm T}}{\pmb E} \le\notag\\&\quad \left({{\lambda }_{\max }}\left(\frac{{{Q}^{\rm T}}+Q}{2}\right)-{{k}^{*}}\right){{\pmb E}^{\rm T}}{\pmb E}\end{align}$
(31) 其中, ${{\lambda }_{\max }}(\cdot )$ 表示矩阵的最大特征值.我们取
$ \begin{align*}{{k}^{*}}={{\lambda }_{\max }}\left(\frac{{{Q}^{\rm T}}+Q}{2}\right)+1\end{align*} $
则由等式 (31) 有:
$ \begin{align*}J\le -{{\pmb E}^{\rm T}}{\pmb E}\end{align*} $
因此根据引理1可得同步误差 ${{\pmb e}_{i}}$ 和参数误差 ${{\pmb e}_{{{\theta }_{i}}}}$ 是渐近稳定的.即驱动网络 (19) 和响应网络 (20) 在所设计的控制器 (21) 的作用下实现函数投影同步, 且未知参数的估值 ${{\hat{\pmb \theta }}_{i}}$ 渐近趋于其真实值 ${\pmb\theta}$ .
3. 数值仿真
在本节中, 我们以两个由10个节点组成的小世界网络为例证实所提方法的有效性.取分数阶Chen系统为网络节点, 其动力学方程为
$\begin{align}\left\{ \begin{array}{l} D_{*}^{q}{{x}_{1}}=a({{x}_{2}}-{{x}_{1}}) \\ D_{*}^{q}{{x}_{2}}=(c-a){{x}_{1}}-{{x}_{1}}{{x}_{3}}+c{{x}_{2}} \\ D_{*}^{q}{{x}_{3}}={{x}_{1}}{{x}_{2}}-b{{x}_{3}} \\\end{array} \right.\end{align}$
(32) 其中, 系统参数为 $a=35, b=3, c=28$ .图 1为 $q=0.95$ 时分数阶Chen系统混沌吸引子图形.
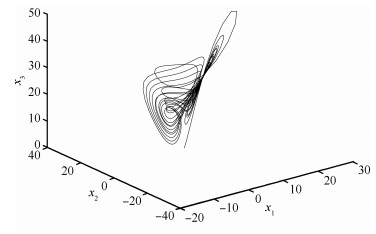 图 1 分数阶Chen系统混沌吸引子 (q=0.95)Fig. 1 Chaoticattractor of fractional-order Chen system (q=0.95)
图 1 分数阶Chen系统混沌吸引子 (q=0.95)Fig. 1 Chaoticattractor of fractional-order Chen system (q=0.95)3.1 参数已知的复杂网络模型的仿真例子
驱动网络和响应网络的数学模型如下:
$\begin{align}&D_{*}^{q}{{\pmb x}_{i}}=\left[\begin{array}{c} a({{x}_{i2}}-{{x}_{i1}})\\ (c-a){{x}_{i1}}-{{x}_{i1}}{{x}_{i3}}+ c{{x}_{i2}}\\{{x}_{i1}}{{x}_{i2}}-b{{x}_{i3}} \end{array}\right]+\notag\\&\qquad \sum\limits_{j=1}^{10}{C{{g}_{ij}}{{\pmb x}_{j}}}, i=1, \cdots, 10\ \end{align}$
(33) $\begin{align}&D_{*}^{q}{{\pmb y}_{i}}=\left[\begin{array}{c}a({{y}_{i2}}-{{y}_{i1}})\\ (c-a){{y}_{i1}}-{{y}_{i1}}{{y}_{i3}}+c{{y}_{i2}}\\{{y}_{i1}}{{y}_{i2}}-b{{y}_{i3}}\end{array}\right]+\notag\\&\qquad \sum\limits_{j=1}^{10}{C{{g}_{ij}}{{\pmb y}_{j}}+{{\pmb u}_{i}}}, \quad i=1, \cdots, 10 \end{align}$
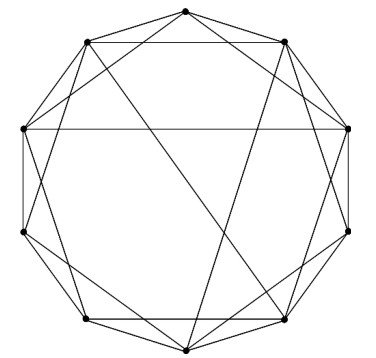
(34) 网络的拓扑结构如图 2所示.
网络拓扑结构矩阵按式 (35) 选取
$G = \left[{\matrix{ {-4}&1&1&0&0&0&0&0&1&1 \cr 1&{-5}&1&1&0&1&0&0&0&1 \cr 1&1&{-5}&1&1&0&0&0&1&0 \cr 0&1&1&{ - 4}&1&1&0&0&0&0 \cr 0&0&1&1&{ - 5}&1&1&0&0&1 \cr 0&1&0&1&1&{ - 5}&1&1&0&0 \cr 0&0&0&0&1&1&{ - 4}&1&1&0 \cr 0&0&0&0&0&1&1&{ - 4}&1&1 \cr 1&0&1&0&0&0&1&1&{ - 5}&0 \cr 1&1&0&0&1&0&0&1&1&{ - 5} \cr } } \right]$
(35) 内部耦合矩阵取 $C={\rm diag}\{1, 1, 1\}$ .控制器 ${{\pmb u}_{i}}$ 按定理1中给出的方法进行设计.在仿真中我们取驱动网络的状态初值为 ${{\pmb x}_{i}}(0)={{[1+0.5i\ 1+0.5i\ \ \ 2+i]}^{\rm T}}$ $(i=1, 2, \cdots, 10)$ , 响应网络的状态初值为 ${{\pmb y}_{i}}(0)={{\left[4+i\ \ 5+i\ \ 6+i\right]}^{\rm T}}$ $(i=1, 2, \cdots, 10)$ .用定理1对控制器 ${{\pmb u}_{i}}$ 进行设计, 其中取正常数 ${{r}_{i}}=5$ $(i=1, 2, \cdots, 10)$ , 反馈增益的初值取为 ${{k}_{i}}(0)=1$ $(i=1, 2, \cdots, 10)$ .取分数阶数 $q=0.95$ , 尺度函数为 $\alpha (t)=2+\sin t$ .仿真结果如图 3所示.
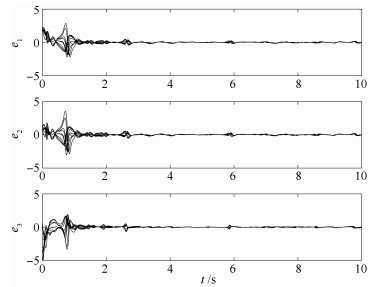 图 3 用控制器 (6) 获得的同步误差时间变化图Fig. 3 The timeevolution of synchronization errors under control law (6)
图 3 用控制器 (6) 获得的同步误差时间变化图Fig. 3 The timeevolution of synchronization errors under control law (6)图 3为驱动网络与响应网络函数投影同步误差随时间变化的图形, 由该图我们可以看到误差系统随着时间的变化逐渐趋近于零.因此驱动网络 (33) 和响应网络 (34) 在所设计的控制器 (6) 的作用下, 实现了函数投影同步.
另外, 我们也可以利用推论1中给出的方法设计控制器 ${{\pmb u}_{i}}$ .由推论1可得 ${{k}_{i}}>0$ .在仿真中取 ${{k}_{i}}=1$ , 响应系统 (34) 与驱动系统 (33) 的同步误差如图 4所示.取 ${{k}_{i}}=50$ , 响应系统 (34) 与驱动系统 (33) 的同步误差如图 5所示.对比图 4和图 5可知, 反馈增益 ${{k}_{i}}$ 越大, 同步误差越小且同步的速度越快; 相反, 反馈增益 ${{k}_{i}}$ 越小, 同步误差越大且同步的速度越慢.
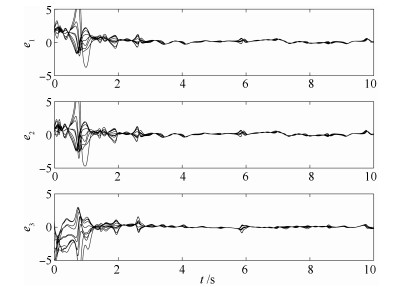 图 4 利用控制器 (15) 获得的同步误差时间变化图 (ki=1)Fig. 4 The timeevolution of synchronization errors under control law (15)(ki=1)
图 4 利用控制器 (15) 获得的同步误差时间变化图 (ki=1)Fig. 4 The timeevolution of synchronization errors under control law (15)(ki=1)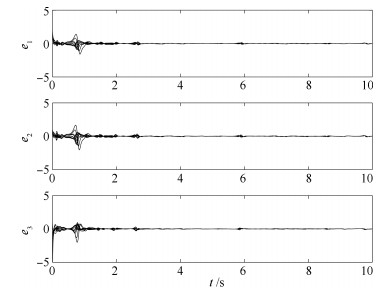 图 5 利用控制器 (15) 获得的同步误差时间变化图 (ki=50)Fig. 5 The timeevolution of synchronization errors under control law (15)(ki=50)
图 5 利用控制器 (15) 获得的同步误差时间变化图 (ki=50)Fig. 5 The timeevolution of synchronization errors under control law (15)(ki=50)3.2 带未知参数的复杂网络模型仿真例子
在本节中, 我们仍以由10个分数阶Chen系统作为节点组成的复杂网络为例, 但在这里我们假设网络中的系统参数是未知的, 并将式 (33) 和 (34) 按式 (19) 和 (20) 的形式改写为
$\begin{array}{lllllll} &\!\!\!\!\!\!\!\!\!D_{*}^{q}{{\pmb x}_{i}}\!=\!\left[\begin{array}{cccccc} 0 \\-{{x}_{i1}}{{x}_{i3}} \\ {{x}_{i1}}{{x}_{i2}} \\\end{array} \right]\!\!+\!\!\left[\begin{matrix} {{x}_{i2}}-{{x}_{i1}}&0&0 \\-{{x}_{i1}}&0&{{x}_{i1}}+{{x}_{i2}} \\ 0 &-{{x}_{i3}}&0 \\\end{matrix} \right]\left[\begin{matrix} a \\ b \\ c \\\end{matrix} \right]+\notag\\& \quad \sum\limits_{j=1}^{10}{C{{g}_{ij}}{{\pmb x}_{j}}}, \ i=1, \cdots, 10 \end{array}$
(36) $\begin{array}{lllllllll}&\!\!\!\!\!\!\!\!\!D_{*}^{q}{{\pmb y}_{i}}\!=\!\left[\begin{array}{cccccccc} 0 \\-{{y}_{i1}}{{y}_{i3}} \\ {{y}_{i1}}{{y}_{i2}} \\\end{array} \right]\!\!+\!\!\left[\begin{matrix} {{y}_{i2}}-{{y}_{i1}}&0&0 \\-{{y}_{i1}}&0&{{y}_{i1}}+{{y}_{i2}} \\ 0 &-{{y}_{i3}}&0 \\\end{matrix} \right]\left[\begin{matrix} a \\ b \\ c \\\end{matrix} \right]+\notag\\& \quad \sum\limits_{j=1}^{10}{C{{g}_{ij}}{{\pmb y}_{j}}+{{\pmb u}_{i}}}, \ \ i=1, \cdots, 10 \end{array}$
(37) 其中, 网络拓扑结构矩阵按式 (35) 选取, 内部耦合矩阵取 $C={diag}\{1, 1, 1\}$ .控制器 ${{\pmb u}_{i}}$ 按定理2进行设计.
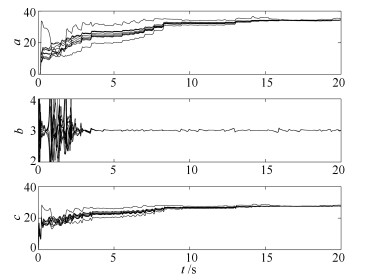
在仿真中, 我们取驱动网络的状态初值为 ${{\pmb x}_{i}}(0)={{\left[1+0.5i\ \ 5+i\ \ 1+i \right]}^{\rm T}} (i=1, 2, \cdots, 10)$ , 响应网络的状态初值为 ${{\pmb y}_{i}}(0)={{\left[1+0.5i\ \ 1+0.5i\ 2+i \right]}^{\rm T}} (i=1, 2, \cdots, 10)$ .利用定理2对控制器 ${{\pmb u}_{i}}$ 进行设计, 其中取正常数 ${{r}_{i}}=5 (i=1, 2, \cdots, 10)$ , 反馈增益的初值为 ${{k}_{i}}(0)=1 (i=1, 2, \cdots, 10)$ .参数估计器的初值取为 ${{\hat{\pmb \theta}}_{i}}(0)={{\left[0\ \ 0\ \ 0 \right]}^{\rm T}} (i=1, 2, \cdots, 10)$ .取分数阶数 $q=0.95$ , 尺度函数 $\alpha (t)=\sin t+2$ .仿真结果如图 6和图 7所示.
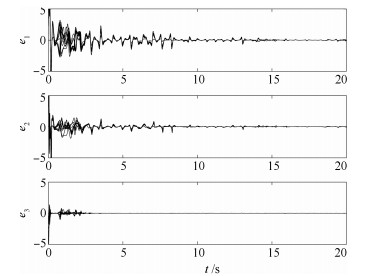 图 6 利用控制器 (21) 获得的同步误差时间变化图Fig. 6 The timeevolution of synchronization errors under control law (21)
图 6 利用控制器 (21) 获得的同步误差时间变化图Fig. 6 The timeevolution of synchronization errors under control law (21)图 6为驱动网络与响应网络函数投影同步误差随时间变化的图形, 由该图我们可以看到同步误差系统随着时间的变化而逐渐趋近于零.因此驱动网络 (36) 和响应网络 (37) 在所设计的控制器 (21) 的作用下, 达到函数投影同步. 图 7为网络中未知参数的估计图, 由该图我们可以看到每个响应节点的参数估计值趋于网络中的未知参数的真实值.因此定理2所给的控制器和未知参数估计器是有效的.
4. 结论
本文利用自适应控制技术和分数阶系统稳定性理论, 研究了两个分数阶复杂动态网络实现函数投影同步的方法.在复杂网络模型参数已知的条件下, 给出了自适应控制器的设计方法, 该法无需计算控制器中的反馈增益, 其反馈增益可自适应调整到适当的常值.进一步为了便于实际应用, 给出了控制器中反馈增益的设计方法, 并分析了控制器参数的选取对控制效果的影响.之后, 给出了复杂网络模型参数未知时, 自适应控制器的设计方法及未知参数的估计方法.最后, 利用数值仿真验证了所提方法的有效性.
-
图 1 分数阶Chen系统混沌吸引子 (q=0.95)
Fig. 1 Chaoticattractor of fractional-order Chen system (q=0.95)
图 3 用控制器 (6) 获得的同步误差时间变化图
Fig. 3 The timeevolution of synchronization errors under control law (6)
图 4 利用控制器 (15) 获得的同步误差时间变化图 (ki=1)
Fig. 4 The timeevolution of synchronization errors under control law (15)(ki=1)
图 5 利用控制器 (15) 获得的同步误差时间变化图 (ki=50)
Fig. 5 The timeevolution of synchronization errors under control law (15)(ki=50)
图 6 利用控制器 (21) 获得的同步误差时间变化图
Fig. 6 The timeevolution of synchronization errors under control law (21)
-
[1] 吕金虎.复杂网络的同步:理论、方法、应用与展望.力学进展, 2008, 38(6):713-722 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGGQ200807001009.htmLv Jin-Hu. Synchronization of complex networks:theories, approaches, applications and prospects. Advances in Mechanics, 2008, 38(6):713-722 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGGQ200807001009.htm [2] Xia C Y, Sun S W, Liu Z X, Chen Z Q, Yuan Z Z. Epidemics of SIRS model with nonuniform transmission on scale-free networks. International Journal of Modern Physics B, 2009, 23(9):2203-2213 doi: 10.1142/S021797920905211X [3] Sanz J, Xia C Y, Meloni S, Moreno Y. Dynamics of interacting diseases. Physical Review X, 2014, 4(4):041005 doi: 10.1103/PhysRevX.4.041005 [4] Xia C Y, Wang L, Sun S W, Wang J. An SIR model with infection delay and propagation vector in complex networks. Nonlinear Dynamics, 2012, 69(3):927-934 doi: 10.1007/s11071-011-0313-y [5] Watts D J, Strogatz S H. Collective dynamics of 'small-world' networks. Nature, 1998, 393(6684):440-442 doi: 10.1038/30918 [6] Barabási A L, Albert R. Emergence of scaling in random networks. Science, 1999, 286(5439):509-512 doi: 10.1126/science.286.5439.509 [7] 席裕庚.大系统控制论与复杂网络-探索与思考.自动化学报, 2013, 39(11):1758-1768 doi: 10.3724/SP.J.1004.2013.01758Xi Yu-Geng. Large-scale systems control and complex networks-exploration and thinking. Acta Automatica Sinica, 2013, 39(11):1758-1768 doi: 10.3724/SP.J.1004.2013.01758 [8] 陈关荣.复杂动态网络环境下控制理论遇到的问题与挑战.自动化学报, 2013, 39(4):312-321 doi: 10.1016/S1874-1029(13)60032-4Chen Guan-Rong. Problems and challenges in control theory under complex dynamical network environments. Acta Automatica Sinica, 2013, 39(4):312-321 doi: 10.1016/S1874-1029(13)60032-4 [9] Pecora L M, Carroll T L. Master stability functions for synchronized coupled systems. Physical Review Letters, 1998, 80(10):2109-2112 doi: 10.1103/PhysRevLett.80.2109 [10] Wang X F, Chen G R. Pinning control of scale-free dynamical networks. Physica A:Statistical Mechanics and its Applications, 2002, 310(3-4):521-531 doi: 10.1016/S0378-4371(02)00772-0 [11] Lv J H, Chen G R. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Transactions on Automatic Control, 2005, 50(6):841-846 doi: 10.1109/TAC.2005.849233 [12] 孙海义, 李宁, 张庆灵.时延复杂网络的自适应周期间歇同步控制.控制与决策, 2013, 28(5):797-800 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305031.htmSun Hai-Yi, Li Ning, Zhang Qing-Ling. Synchronization of delayed complex dynamical networks via adaptive periodically intermittent control. Control and Decision, 2013, 28(5):797-800 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305031.htm [13] 陈娟, 陆君安, 周进.复杂网络同步态与孤立节点解的关系.自动化学报, 2013, 39(12):2111-2120 http://www.aas.net.cn/CN/abstract/abstract18250.shtmlChen Juan, Lu Jun-An, Zhou Jin. On the relationship between the synchronous state and the solution of an isolated node in a complex network. Acta Automatica Sinica, 2013, 39(12):2111-2120 http://www.aas.net.cn/CN/abstract/abstract18250.shtml [14] 罗毅平, 周笔锋.时滞扩散性复杂网络同步保性能控制.自动化学报, 2015, 41(1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtmlLuo Yi-Ping, Zhou Bi-Feng. Guaranteed cost synchronization control of diffusible complex network systems with time delay. Acta Automatica Sinica, 2015, 41(1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtml [15] 范永青, 王银河, 王青云, 章云.具有相似节点的耦合时滞复杂网络的稳定性与同步控制分析.控制与决策, 2013, 28(2):247-252 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302016.htmFan Yong-Qing, Wang Yin-He, Wang Qing-Yun, Zhang Yun. Control analysis of the stabilization and synchronization of coupling time-delay complex dynamical networks with similar nodes. Control and Decision, 2013, 28(2):247-252 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302016.htm [16] 张丽丽, 王银河, 王钦若.不同维数非线性节点非线性耦合复杂动态网络渐近同步.控制与决策, 2014, 29(3):537-540 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201403026.htmZhang Li-Li, Wang Yin-He, Wang Qin-Ruo. Asymptotic synchronization for nonlinear coupled complex dynamical networks with different-dimension nonlinear nodes. Control and Decision, 2014, 29(3):537-540 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201403026.htm [17] 唐新华, 陆君安, 张伟伟.基于反步法的混沌系统函数投影同步.动力学与控制学报, 2007, 5(3):216-219 http://www.cnki.com.cn/Article/CJFDTOTAL-DLXK200703006.htmTang Xin-Hua, Lu Jun-An, Zhang Wei-Wei. The function projective synchronization of chaotic system using backstepping design. Journal of Dynamics and Control, 2007, 5(3):216-219 http://www.cnki.com.cn/Article/CJFDTOTAL-DLXK200703006.htm [18] Du H Y, Zeng Q S, Wang C H. Function projective synchronization of different chaotic systems with uncertain parameters. Physics Letters A, 2008, 372(33):5402-5410 doi: 10.1016/j.physleta.2008.06.036 [19] Lee T H, Park J H. Generalized functional projective synchronization of Chen-Lee chaotic systems and its circuit implementation. International Journal of the Physical Sciences, 2010, 5(7):1183-1190 https://www.researchgate.net/publication/268358031_Generalized_functional_projective_synchronization_of_Chen-Lee_chaotic_systems_and_its_circuit_implementation [20] Du H Y, Li F, Meng G S. Robust function projective synchronization of two different chaotic systems with unknown parameters. Journal of the Franklin Institute, 2011, 348(10):2782-2794 doi: 10.1016/j.jfranklin.2011.08.016 [21] Zhou P, Zhu W. Function projective synchronization for fractional-order chaotic systems. Nonlinear Analysis:Real World Applications, 2011, 12(2):811-816 doi: 10.1016/j.nonrwa.2010.08.008 [22] Du H Y, Zeng Q S, Wang C H. Modified function projective synchronization of chaotic system. Chaos, Solitons and Fractals, 2009, 42(4):2399-2404 doi: 10.1016/j.chaos.2009.03.120 [23] Zhang R, Yang Y Q, Xu Z Y, Hu M F. Function projective synchronization in drive-response dynamical network. Physics Letters A, 2010, 374(30):3025-3028 doi: 10.1016/j.physleta.2010.05.041 [24] Du H Y. Function projective synchronization in drive-response dynamical networks with non-identical nodes. Chaos, Solitons and Fractals, 2011, 44(7):510-514 doi: 10.1016/j.chaos.2011.04.002 [25] Chen Y, Cao L, Sun M. Robust modified function projective synchronization in network with unknown parameters and mismatch parameters. International Journal of Nonlinear Science, 2010, 10(1):17-23 https://www.researchgate.net/publication/228824009_Robust_Modified_Function_Projective_Synchronization_in_Network_with_Unknown_Parameters_and_Mismatch_Parameters [26] Du H Y. Adaptive open-plus-closed-loop control method of modified function projective synchronization in complex networks. International Journal of Modern Physics C, 2011, 22(12):1393-1407 doi: 10.1142/S0129183111016956 [27] Wu X J, Lu H T. Generalized function projective (lag, anticipated and complete) synchronization between two different complex networks with nonidentical nodes. Communications in Nonlinear Science and Numerical Simulation, 2012, 17(7):3005-3021 doi: 10.1016/j.cnsns.2011.10.035 [28] Du H Y, Shi P, Lv N. Function projective synchronization in complex dynamical networks with time delay via hybrid feedback control. Nonlinear Analysis:Real World Applications, 2013, 14(2):1182-1190 doi: 10.1016/j.nonrwa.2012.09.009 [29] Hartley T T, Lorenzo C F, Qammer H K. Chaos in a fractional order Chua's system. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications, 1995, 42(8):485-490 doi: 10.1109/81.404062 [30] Grigorenko I, Grigorenko E. Chaotic dynamics of the fractional Lorenz system. Physical Review Letters, 2003, 91(3):034101 doi: 10.1103/PhysRevLett.91.034101 [31] Li C G, Chen G R. Chaos in the fractional order Chen system and its control. Chaos, Solitons and Fractals, 2004, 22(3):549-554 doi: 10.1016/j.chaos.2004.02.035 [32] Li C G, Chen G R. Chaos and hyperchaos in the fractional order Rössler equations. Physica A, 2004, 341:55-61 doi: 10.1016/j.physa.2004.04.113 [33] Zhang R F, Chen D Y, Do Y, Ma X Y. Synchronization and anti-synchronization of fractional dynamical networks. Journal of Vibration and Control, 2015, 21(16):3383-3402 doi: 10.1177/1077546314522506 [34] Chen D Y, Zhang R F, Liu X Z, Ma X Y. Fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(3):4105-4121 https://www.researchgate.net/publication/262922157_Fractional_order_Lyapunov_stability_theorem_and_its_applications_in_synchronization_of_complex_dynamical_networks [35] Yang L X, Jiang J. Adaptive synchronization of drive-response fractional-order complex dynamical networks with uncertain parameters. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(5):1496-1506 doi: 10.1016/j.cnsns.2013.09.021 [36] Xu B B, Chen D Y, Zhang H, Wang F F. The modeling of the fractional-order shafting system for a water jet mixed-flow pump during the startup process. Communications in Nonlinear Science and Numerical Simulation, 2015, 29(1-3):12-24 doi: 10.1016/j.cnsns.2015.04.018 [37] 胡建兵, 韩焱, 赵灵冬.一种新的分数阶系统稳定理论及在back-stepping方法同步分数阶混沌系统中的应用.物理学报, 2009, 58(4):2235-2239 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB200904018.htmHu Jian-Bing, Han Yan, Zhao Ling-Dong. A novel stablility theorem for fractional systems and its applying in synchronizing fractional chaotic system based on back-stepping approach. Acta Physica Sinica, 2009, 58(4):2235-2239 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB200904018.htm 期刊类型引用(6)
1. 王森,丛国涛,王晓袁,杨影. 量子细胞神经网络缩阶混沌函数投影同步. 计算机仿真. 2021(04): 143-146+271 .  百度学术
百度学术2. 张檬,韩敏. 基于单向耦合法的不确定复杂网络间有限时间同步. 自动化学报. 2021(07): 1624-1632 . 本站查看3. 张宗瑶,赵小山,卢雅,徐涛. 分数阶超混沌系统异构射影延迟同步研究. 天津职业技术师范大学学报. 2018(02): 39-43 . 百度学术4. 于婷,伍锡如. 基于不连续激励函数的时滞分数阶复杂网络的牵制同步方法. 桂林电子科技大学学报. 2018(05): 411-416 . 百度学术5. 刘娜,邓玮,方洁,丁国强. 一类异结构分数阶复杂网络的自适应同步. 计算机应用研究. 2017(09): 2655-2658 . 百度学术6. 韦相,赵军产,胡春华. 两个异构复杂网络的广义同步与参数识别. 自动化学报. 2017(04): 595-603 . 本站查看其他类型引用(8)
-

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2573
- HTML全文浏览量: 210
- PDF下载量: 1004
- 被引次数: 14
