

Function Projective Synchronization of Two Fractional-order Complex Dynamical Networks
-
摘要: 复杂网络的同步问题是复杂网络研究的热点之一, 本文研究了两个分数阶复杂网络间的函数投影同步问题.分别针对网络模型参数已知和参数未知两种情况, 利用自适应控制技术和分数阶系统稳定性理论, 设计自适应控制器, 使两个分数阶复杂动态网络实现函数投影同步.最后利用数值仿真验证所提出方法的有效性.Abstract: Synchronization is one of the hot topics in the investigation of complex dynamical networks. Two fractional-order complex dynamical networks with known parameters and unknown parameters are respectively investigated in this paper. Based on the adaptive control technique and stability theory of fractional-order differential system, an adaptive controller is designed for each case. Numerical examples are provided to show the effectiveness of the proposed methods.
-
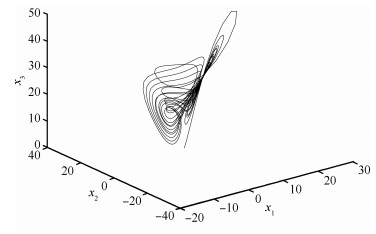
图 1 分数阶Chen系统混沌吸引子 (q=0.95)
Fig. 1 Chaoticattractor of fractional-order Chen system (q=0.95)
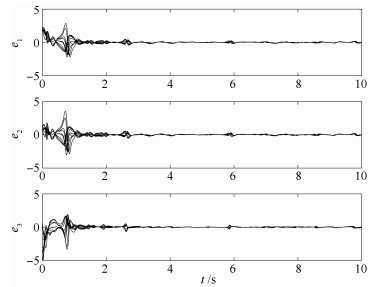
图 3 用控制器 (6) 获得的同步误差时间变化图
Fig. 3 The timeevolution of synchronization errors under control law (6)
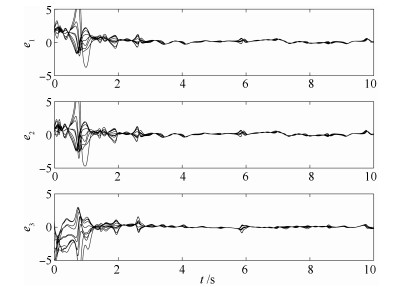
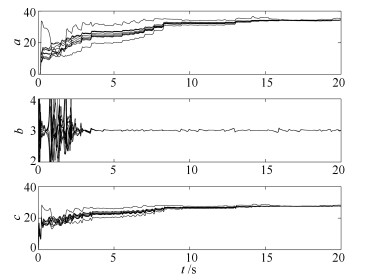
图 4 利用控制器 (15) 获得的同步误差时间变化图 (ki=1)
Fig. 4 The timeevolution of synchronization errors under control law (15)(ki=1)
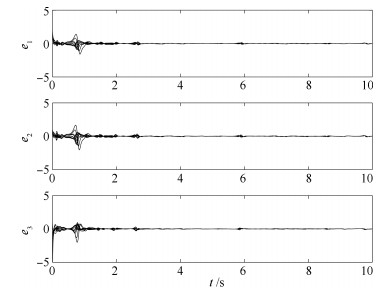
图 5 利用控制器 (15) 获得的同步误差时间变化图 (ki=50)
Fig. 5 The timeevolution of synchronization errors under control law (15)(ki=50)
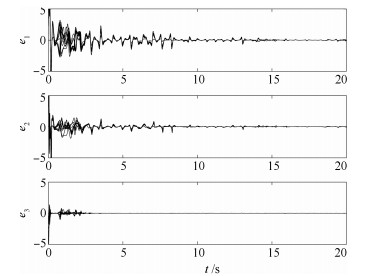
图 6 利用控制器 (21) 获得的同步误差时间变化图
Fig. 6 The timeevolution of synchronization errors under control law (21)
-
[1] 吕金虎.复杂网络的同步:理论、方法、应用与展望.力学进展, 2008, 38(6):713-722 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGGQ200807001009.htmLv Jin-Hu. Synchronization of complex networks:theories, approaches, applications and prospects. Advances in Mechanics, 2008, 38(6):713-722 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGGQ200807001009.htm [2] Xia C Y, Sun S W, Liu Z X, Chen Z Q, Yuan Z Z. Epidemics of SIRS model with nonuniform transmission on scale-free networks. International Journal of Modern Physics B, 2009, 23(9):2203-2213 doi: 10.1142/S021797920905211X [3] Sanz J, Xia C Y, Meloni S, Moreno Y. Dynamics of interacting diseases. Physical Review X, 2014, 4(4):041005 doi: 10.1103/PhysRevX.4.041005 [4] Xia C Y, Wang L, Sun S W, Wang J. An SIR model with infection delay and propagation vector in complex networks. Nonlinear Dynamics, 2012, 69(3):927-934 doi: 10.1007/s11071-011-0313-y [5] Watts D J, Strogatz S H. Collective dynamics of 'small-world' networks. Nature, 1998, 393(6684):440-442 doi: 10.1038/30918 [6] Barabási A L, Albert R. Emergence of scaling in random networks. Science, 1999, 286(5439):509-512 doi: 10.1126/science.286.5439.509 [7] 席裕庚.大系统控制论与复杂网络-探索与思考.自动化学报, 2013, 39(11):1758-1768 doi: 10.3724/SP.J.1004.2013.01758Xi Yu-Geng. Large-scale systems control and complex networks-exploration and thinking. Acta Automatica Sinica, 2013, 39(11):1758-1768 doi: 10.3724/SP.J.1004.2013.01758 [8] 陈关荣.复杂动态网络环境下控制理论遇到的问题与挑战.自动化学报, 2013, 39(4):312-321 doi: 10.1016/S1874-1029(13)60032-4Chen Guan-Rong. Problems and challenges in control theory under complex dynamical network environments. Acta Automatica Sinica, 2013, 39(4):312-321 doi: 10.1016/S1874-1029(13)60032-4 [9] Pecora L M, Carroll T L. Master stability functions for synchronized coupled systems. Physical Review Letters, 1998, 80(10):2109-2112 doi: 10.1103/PhysRevLett.80.2109 [10] Wang X F, Chen G R. Pinning control of scale-free dynamical networks. Physica A:Statistical Mechanics and its Applications, 2002, 310(3-4):521-531 doi: 10.1016/S0378-4371(02)00772-0 [11] Lv J H, Chen G R. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Transactions on Automatic Control, 2005, 50(6):841-846 doi: 10.1109/TAC.2005.849233 [12] 孙海义, 李宁, 张庆灵.时延复杂网络的自适应周期间歇同步控制.控制与决策, 2013, 28(5):797-800 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305031.htmSun Hai-Yi, Li Ning, Zhang Qing-Ling. Synchronization of delayed complex dynamical networks via adaptive periodically intermittent control. Control and Decision, 2013, 28(5):797-800 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201305031.htm [13] 陈娟, 陆君安, 周进.复杂网络同步态与孤立节点解的关系.自动化学报, 2013, 39(12):2111-2120 http://www.aas.net.cn/CN/abstract/abstract18250.shtmlChen Juan, Lu Jun-An, Zhou Jin. On the relationship between the synchronous state and the solution of an isolated node in a complex network. Acta Automatica Sinica, 2013, 39(12):2111-2120 http://www.aas.net.cn/CN/abstract/abstract18250.shtml [14] 罗毅平, 周笔锋.时滞扩散性复杂网络同步保性能控制.自动化学报, 2015, 41(1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtmlLuo Yi-Ping, Zhou Bi-Feng. Guaranteed cost synchronization control of diffusible complex network systems with time delay. Acta Automatica Sinica, 2015, 41(1):147-156 http://www.aas.net.cn/CN/abstract/abstract18592.shtml [15] 范永青, 王银河, 王青云, 章云.具有相似节点的耦合时滞复杂网络的稳定性与同步控制分析.控制与决策, 2013, 28(2):247-252 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302016.htmFan Yong-Qing, Wang Yin-He, Wang Qing-Yun, Zhang Yun. Control analysis of the stabilization and synchronization of coupling time-delay complex dynamical networks with similar nodes. Control and Decision, 2013, 28(2):247-252 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302016.htm [16] 张丽丽, 王银河, 王钦若.不同维数非线性节点非线性耦合复杂动态网络渐近同步.控制与决策, 2014, 29(3):537-540 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201403026.htmZhang Li-Li, Wang Yin-He, Wang Qin-Ruo. Asymptotic synchronization for nonlinear coupled complex dynamical networks with different-dimension nonlinear nodes. Control and Decision, 2014, 29(3):537-540 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201403026.htm [17] 唐新华, 陆君安, 张伟伟.基于反步法的混沌系统函数投影同步.动力学与控制学报, 2007, 5(3):216-219 http://www.cnki.com.cn/Article/CJFDTOTAL-DLXK200703006.htmTang Xin-Hua, Lu Jun-An, Zhang Wei-Wei. The function projective synchronization of chaotic system using backstepping design. Journal of Dynamics and Control, 2007, 5(3):216-219 http://www.cnki.com.cn/Article/CJFDTOTAL-DLXK200703006.htm [18] Du H Y, Zeng Q S, Wang C H. Function projective synchronization of different chaotic systems with uncertain parameters. Physics Letters A, 2008, 372(33):5402-5410 doi: 10.1016/j.physleta.2008.06.036 [19] Lee T H, Park J H. Generalized functional projective synchronization of Chen-Lee chaotic systems and its circuit implementation. International Journal of the Physical Sciences, 2010, 5(7):1183-1190 https://www.researchgate.net/publication/268358031_Generalized_functional_projective_synchronization_of_Chen-Lee_chaotic_systems_and_its_circuit_implementation [20] Du H Y, Li F, Meng G S. Robust function projective synchronization of two different chaotic systems with unknown parameters. Journal of the Franklin Institute, 2011, 348(10):2782-2794 doi: 10.1016/j.jfranklin.2011.08.016 [21] Zhou P, Zhu W. Function projective synchronization for fractional-order chaotic systems. Nonlinear Analysis:Real World Applications, 2011, 12(2):811-816 doi: 10.1016/j.nonrwa.2010.08.008 [22] Du H Y, Zeng Q S, Wang C H. Modified function projective synchronization of chaotic system. Chaos, Solitons and Fractals, 2009, 42(4):2399-2404 doi: 10.1016/j.chaos.2009.03.120 [23] Zhang R, Yang Y Q, Xu Z Y, Hu M F. Function projective synchronization in drive-response dynamical network. Physics Letters A, 2010, 374(30):3025-3028 doi: 10.1016/j.physleta.2010.05.041 [24] Du H Y. Function projective synchronization in drive-response dynamical networks with non-identical nodes. Chaos, Solitons and Fractals, 2011, 44(7):510-514 doi: 10.1016/j.chaos.2011.04.002 [25] Chen Y, Cao L, Sun M. Robust modified function projective synchronization in network with unknown parameters and mismatch parameters. International Journal of Nonlinear Science, 2010, 10(1):17-23 https://www.researchgate.net/publication/228824009_Robust_Modified_Function_Projective_Synchronization_in_Network_with_Unknown_Parameters_and_Mismatch_Parameters [26] Du H Y. Adaptive open-plus-closed-loop control method of modified function projective synchronization in complex networks. International Journal of Modern Physics C, 2011, 22(12):1393-1407 doi: 10.1142/S0129183111016956 [27] Wu X J, Lu H T. Generalized function projective (lag, anticipated and complete) synchronization between two different complex networks with nonidentical nodes. Communications in Nonlinear Science and Numerical Simulation, 2012, 17(7):3005-3021 doi: 10.1016/j.cnsns.2011.10.035 [28] Du H Y, Shi P, Lv N. Function projective synchronization in complex dynamical networks with time delay via hybrid feedback control. Nonlinear Analysis:Real World Applications, 2013, 14(2):1182-1190 doi: 10.1016/j.nonrwa.2012.09.009 [29] Hartley T T, Lorenzo C F, Qammer H K. Chaos in a fractional order Chua's system. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications, 1995, 42(8):485-490 doi: 10.1109/81.404062 [30] Grigorenko I, Grigorenko E. Chaotic dynamics of the fractional Lorenz system. Physical Review Letters, 2003, 91(3):034101 doi: 10.1103/PhysRevLett.91.034101 [31] Li C G, Chen G R. Chaos in the fractional order Chen system and its control. Chaos, Solitons and Fractals, 2004, 22(3):549-554 doi: 10.1016/j.chaos.2004.02.035 [32] Li C G, Chen G R. Chaos and hyperchaos in the fractional order Rössler equations. Physica A, 2004, 341:55-61 doi: 10.1016/j.physa.2004.04.113 [33] Zhang R F, Chen D Y, Do Y, Ma X Y. Synchronization and anti-synchronization of fractional dynamical networks. Journal of Vibration and Control, 2015, 21(16):3383-3402 doi: 10.1177/1077546314522506 [34] Chen D Y, Zhang R F, Liu X Z, Ma X Y. Fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(3):4105-4121 https://www.researchgate.net/publication/262922157_Fractional_order_Lyapunov_stability_theorem_and_its_applications_in_synchronization_of_complex_dynamical_networks [35] Yang L X, Jiang J. Adaptive synchronization of drive-response fractional-order complex dynamical networks with uncertain parameters. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(5):1496-1506 doi: 10.1016/j.cnsns.2013.09.021 [36] Xu B B, Chen D Y, Zhang H, Wang F F. The modeling of the fractional-order shafting system for a water jet mixed-flow pump during the startup process. Communications in Nonlinear Science and Numerical Simulation, 2015, 29(1-3):12-24 doi: 10.1016/j.cnsns.2015.04.018 [37] 胡建兵, 韩焱, 赵灵冬.一种新的分数阶系统稳定理论及在back-stepping方法同步分数阶混沌系统中的应用.物理学报, 2009, 58(4):2235-2239 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB200904018.htmHu Jian-Bing, Han Yan, Zhao Ling-Dong. A novel stablility theorem for fractional systems and its applying in synchronizing fractional chaotic system based on back-stepping approach. Acta Physica Sinica, 2009, 58(4):2235-2239 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB200904018.htm -

 下载:
下载:

计量
- 文章访问数: 2745
- HTML全文浏览量: 255
- PDF下载量: 1006
- 被引次数: 0
