

Local Image Descriptor of Feature Combination and Rotation Invariant Space Division Combination
-
摘要: 提出了一种新的局部图像描述符: 特征联合和旋转不变空间分割联合描述符(Feature combination and rotation invariant space division combination descriptor, FCSCD). 提出了一种新的局部特征: WLBP (Weber local binary pattern), 该特征由局部二进制模式和韦伯二进制差分激励联合得到. 提出了一种新的用于特征汇聚的旋转不变空间分割方法, 该方法由强度序空间分割和圆环空间分割联合得到. WLBP在局部旋转不变坐标系计算得到, 强度序和圆环空间分割本身也具有旋转不变性, 所以FCSCD描述符在不需要计算图像块主方向下保持了旋转不变性. 与现有的局部描述符相比, 本文的联合方法编码了多种类型的信息在描述符直方图中, 所以FCSCD辨别能力更强, 鲁棒性更强. 图像匹配实验结果表明了本文方法的有效性和优越性, 所提出的描述符具有很高的匹配性能, 优于其他的主流局部描述符(SIFT、CS-LBP、OSID、LIOP、EOD和MRRID).Abstract: This paper proposes a novel local image descriptor called FCSCD (feature combination and rotation invariant space division combination descriptor). A new local feature, WLBP (Weber local binary pattern), is proposed which combines Weber binary differential excitation and local binary pattern. A new rotation-invariant space division for feature pooling is also proposed which combines intensity order space division and annular space division. WLBP is computed in a rotation invariant local coordinate system. Intensity order and annular space division are inherently rotation invariant. So, FCSCD obtains rotation invariance without computing principle orientation of the image patch. Compared with other existing descriptors, this combination method makes FCSCD encode various types of information into a histogram, and so it is more distinctive and robust. Experimental results on image matching demonstrate the effectiveness and superiorities of the proposed descriptor compared to the state-of-the-art descriptors including SIFT, CS-LBP, OSID, LIOP, EOD, and MRRID.
-
Key words:
- Local image descriptor /
- SIFT /
- image matching /
- rotation invariance
-
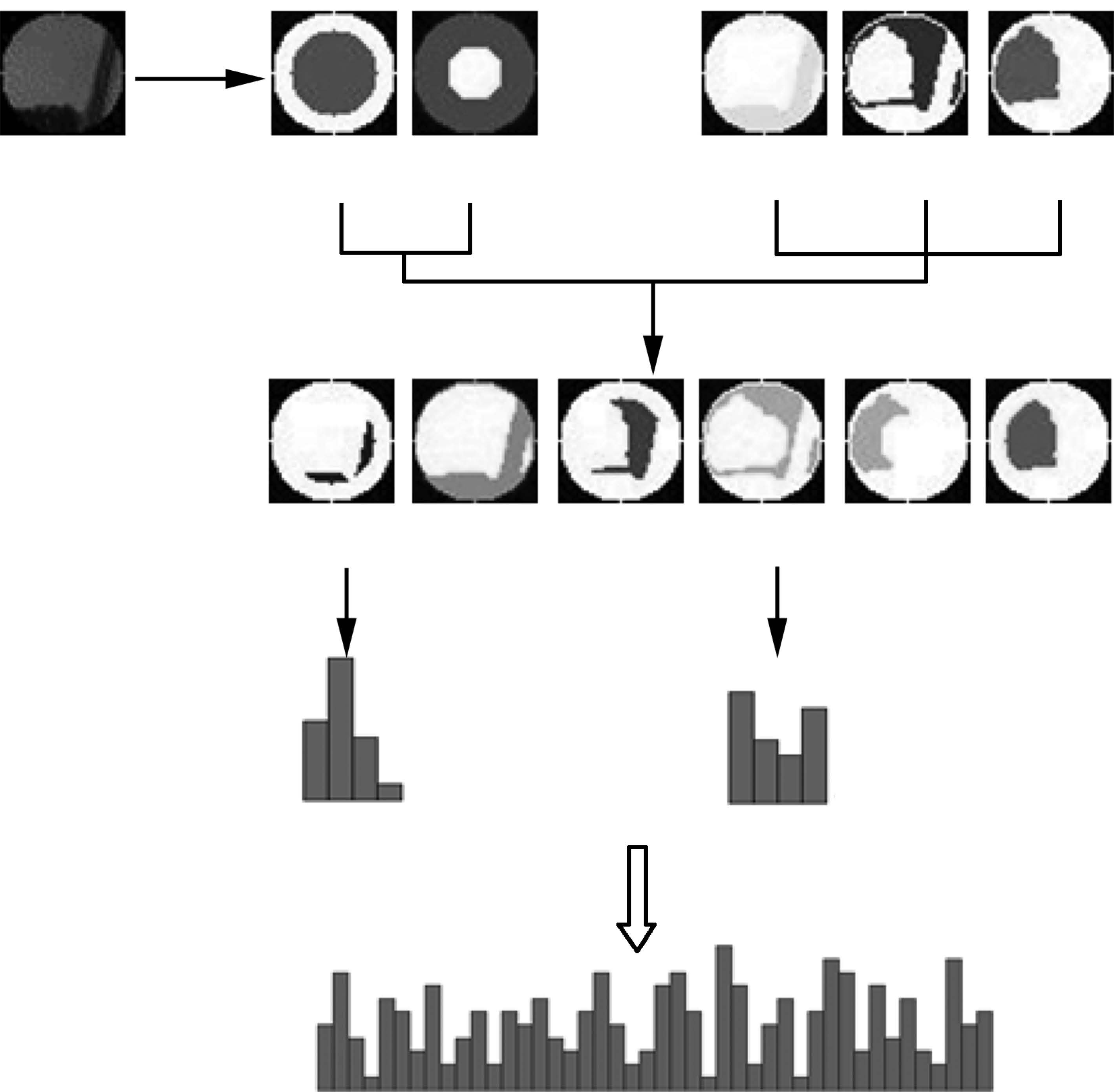
图 3 通过联合空间分割汇聚支撑域中局部特征的流程
Fig. 3 The procedure of pooling local features in a support region by the combination of space divisions

图 4 四个支撑区域选择及其归一化
Fig. 4 The selection of four support regions and their normalization

图 6 不同参数下FCSCD 描述符的匹配性能
Fig. 6 Matching performances of FCSCD under di®erent parameter settings

图 7 各种联合情况下FCSCD 描述符的匹配性能对比
Fig. 7 Matching performance comparisons of FCSCD under di®erent combination situations

图 8 多支撑域条件下FCSCD 描述符的匹配性能对比
Fig. 8 Matching performance comparisons of FCSCD under multiple support regions
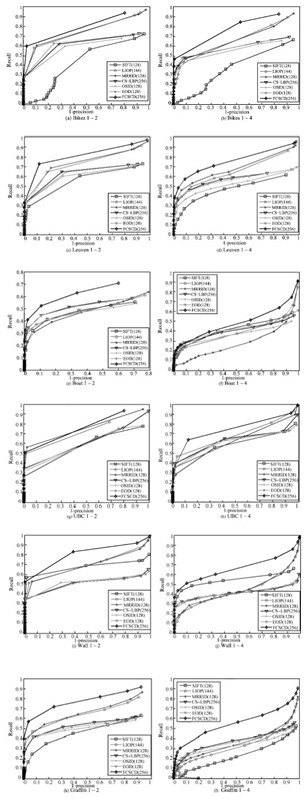
图 9 FCSCD 描述符和其他主流描述符的匹配性能对比
Fig. 9 Matching performance comparisons of FCSCD and other popular descriptors
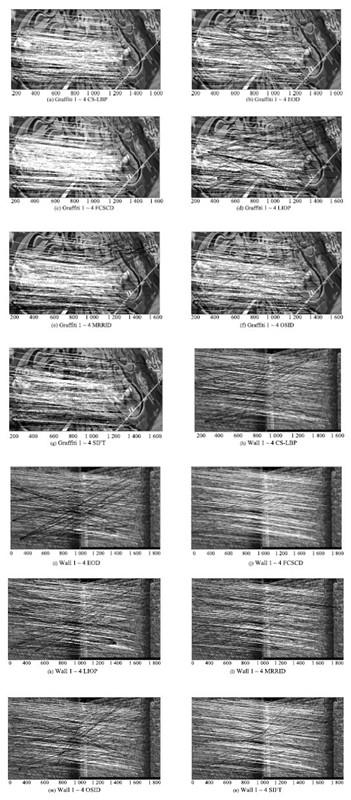
图 10 FCSCD 描述符和其他主流描述符的图像匹配图
Fig. 10 Image matching results of FCSCD and other popular descriptors
表 1 FCSCD 描述符的参数设置
Table 1 The setting of parameters for FCSCD descriptor
参数 设置值 k 3, 4, 5 d 2, 3  下载: 导出CSV
下载: 导出CSV
表 2 描述符运行时间对比
Table 2 Comparison of run-time of descriptors
SIFT CS-LBP OSID LIOP MRRID MRRID(4) EOD FCSCD 耗时(ms) 2.4 1.6 2.1 3.1 2.6 10.4 3.3 2.7
下载: 导出CSV
-
[1] Dong Z L, Zhang G F, Jia J Y, Bao H J. Efficient keyframe-based real-time camera tracking. Computer Vision and Image Understanding, 2014, 118: 97-110 doi: 10.1016/j.cviu.2013.08.005 [2] Cummins M, Newman P. Appearance-only SLAM at large scale with FAB-MAP 2.0. The International Journal of Robotics Research, 2011, 30(9): 1100-1123 doi: 10.1177/0278364910385483 [3] 桂振文, 吴侹, 彭欣. 一种融合多传感器信息的移动图像识别方法. 自动化学报, 2015, 41(8): 1394-1404 http://www.aas.net.cn/CN/abstract/abstract18714.shtmlGui Zhen-Wen, Wu Ting, Peng Xin. A novel recognition approach for mobile image fusing inertial sensors. Acta Automatica Sinica, 2015, 41(8): 1394-1404 http://www.aas.net.cn/CN/abstract/abstract18714.shtml [4] Zhou W G, Li H Q, Hong R C, Lu Y J, Tian Q. BSIFT: toward data-independent codebook for large scale image search. IEEE Transactions on Image Processing, 2015, 24(3): 967-979 doi: 10.1109/TIP.2015.2389624 [5] 刘培娜, 刘国军, 郭茂祖, 刘扬, 李盼. 非负局部约束线性编码图像分类算法. 自动化学报, 2015, 41(7): 1235-1243 http://www.aas.net.cn/CN/abstract/abstract18697.shtmlLiu Pei-Na, Liu Guo-Jun, Guo Mao-Zu, Liu Yang, Li Pan. Image classification based on non-negative locality-constrained linear coding. Acta Automatica Sinica, 2015, 41(7): 1235-1243 http://www.aas.net.cn/CN/abstract/abstract18697.shtml [6] 祝继华, 周颐, 王晓春, 邗汶锌, 马亮. 基于图像配准的栅格地图拼接方法. 自动化学报, 2015, 41(2): 285-294 http://www.aas.net.cn/CN/abstract/abstract18607.shtmlZhu Ji-Hua, Zhou Yi, Wang Xiao-Chun, Han Wen-Xin, Ma Liang. Grid map merging approach based on image registration. Acta Automatica Sinica, 2015, 41(2): 285-294 http://www.aas.net.cn/CN/abstract/abstract18607.shtml [7] Lowe D G. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60(2): 91-110 doi: 10.1023/B:VISI.0000029664.99615.94 [8] Ke Y, Sukthankar R. PCA-SIFT: a more distinctive representation for local image descriptors. In: Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington, USA: IEEE, 2004. II-506-II-513 [9] 颜雪军, 赵春霞, 袁夏. 2DPCA-SIFT: 一种有效的局部特征描述方法. 自动化学报, 2014, 40(4): 675-682 http://www.aas.net.cn/CN/abstract/abstract18333.shtmlYan Xue-Jun, Zhao Chun-Xia, Yuan Xia. 2DPCA-SIFT: an efficient local feature descriptor. Acta Automatica Sinica, 2014, 40(4): 675-682 http://www.aas.net.cn/CN/abstract/abstract18333.shtml [10] Mikolajczyk K, Schmid C. A performance evaluation of local descriptors. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(10): 1615-1630 doi: 10.1109/TPAMI.2005.188 [11] Bay H, Ess A, Tuytelaars T, van Gool L. Speeded-up robust features (SURF). Computer Vision and Image Understanding, 2008, 110(3): 346-359 doi: 10.1016/j.cviu.2007.09.014 [12] Tola E, Lepetit V, Fua P. DAISY: an efficient dense descriptor applied to wide-baseline stereo. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(5): 815-830 doi: 10.1109/TPAMI.2009.77 [13] Brown M, Gang H, Winder S. Discriminative learning of local image descriptors. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(1): 43-57 doi: 10.1109/TPAMI.2010.54 [14] Simonyan K, Vedaldi A, Zisserman A. Learning local feature descriptors using convex optimisation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(8): 1573-1585 doi: 10.1109/TPAMI.2014.2301163 [15] Heikkilä M, Pietikäinen M, Schmid C. Description of interest regions with local binary patterns. Pattern Recognition, 2009, 42(3): 425-436 doi: 10.1016/j.patcog.2008.08.014 [16] Tang F, Lim S H, Change N L, Tao H. A novel feature descriptor invariant to complex brightness changes. In: Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami, FL: IEEE, 2009. 2631-2638 [17] Chen J, Shan S G, He C, Zhao G Y, Pietikainen M, Chen X L, Gao W. WLD: a robust local image descriptor. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(9): 1705-1720 doi: 10.1109/TPAMI.2009.155 [18] Kim B, Yoo H, Sohn K. Exact order based feature descriptor for illumination robust image matching. Pattern Recognition, 2013, 46(12): 3268-3278 doi: 10.1016/j.patcog.2013.04.015 [19] Lazebnik S, Schmid C, Ponce J. A sparse texture representation using local affine regions. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(8): 1265-1278 doi: 10.1109/TPAMI.2005.151 [20] Fan B, Wu F C, Hu Z Y. Rotationally invariant descriptors using intensity order pooling. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(10): 2031-2045 doi: 10.1109/TPAMI.2011.277 [21] Wang Z H, Fan B, Wu F C. Local intensity order pattern for feature description. In: Proceedings of the 2011 IEEE Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. 603-610 [22] Mikolajczyk K, Tuytelaars T, Schmid C, Zisserman A, Matas J, Schaffalitzky F, Kadir T, van Gool L. A comparison of affine region detectors. International Journal of Computer Vision, 2005, 65(1-2): 43-72 doi: 10.1007/s11263-005-3848-x -

 下载:
下载:



计量
- 文章访问数: 2023
- HTML全文浏览量: 364
- PDF下载量: 1170
- 被引次数: 0
