

-
摘要: 针对现有的阴影检测算法对较亮阴影和较暗地物中的阴影不能同时较好地检测等问题, 提出一种结合多种特征的高分辨率遥感影像阴影检测方法.该算法首先结合主成分分析、颜色特征和直方图的分割构建多种阈值检测条件, 然后综合多种特征来进行遥感影像阴影的初步检测, 最后通过分析RGB模型在阴影与非阴影地物上的差别, 利用颜色特性最终检测出阴影区域.实验结果表明, 本文算法能有效检测较亮阴影和较暗地物中的阴影.与现有方法相比, 较亮阴影的平均总错误率从水平集法的31.85%降至24.61%, 较暗地物中阴影的平均总错误率从自动检测法的37.75%降至23.30%.Abstract: To aim at the problem that shadow detection algorithms cannot simultaneously well detect partial-bright shadows and shadows in dark object, a kind of high resolution remote sensing images shadow detection method that combine a multiple features is proposed. The algorithm firstly combines principal component analysis, color features and histogram segmentation to construct the detection conditions of various thresholds, then integra various features of remote sensing image for initial detection, finally by analyzing the difference of the RGB models in the shadow and non shadow, uses the color characteristics to detect the shadow region. Experimental results show that the algorithm proposed in this paper can detect partial uses bright shadows and shadows in dark object effectively. Compared with the existing methods, the average total error rate goes from the level set method 31.85% down to 24.61% for partial shadow, and the average total error rate is reduced from the automatic detection method 37.75% to 23.30% for shadows in dark object.
-
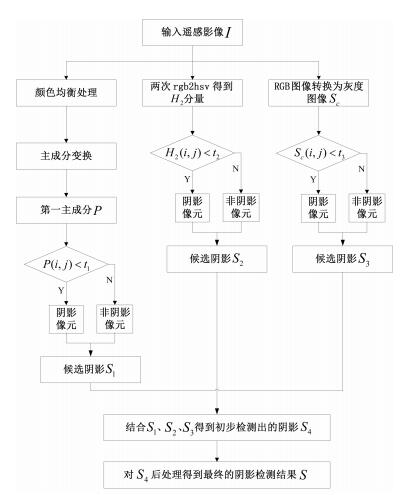
图 3 结合多种检测条件的算法流程图
Fig. 3 Flowchart of the algorithm combined with many detection conditions
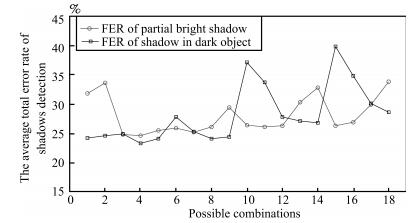
图 4 不同情况的亮、暗阴影的总错误率
Fig. 4 Total error rate of different conditions of light and dark shadow
表 1 不同条件下阴影检测性能评价 (%)
Table 1 Detection performance evaluation of shadow under different conditions (%)
Images Miami Mecca ${S_1}$ ${S_2}$ ${S_3}$ ${S_1}$ ${S_2}$ ${S_3}$ ${{{F}}_{\rm OER}}$ 6.13 14.98 26.94 0.27 11.19 5.41 ${{{F}}_{\rm AER}}$ 18.61 5.80 6.23 211.38 39.38 32.24 ${{{F}}_{\rm TER}}$ 24.74 20.79 33.20 211.65 50.57 37.66  下载: 导出CSV
下载: 导出CSV
表 2 不同条件下阴影检测性能评价 (%)
Table 2 Detection performance evaluation of shadow under different conditions (%)
Images Miami Jacksonville Las Vegas Urban image 1 Average Reference [8] 38.41 6.20 37.27 47.17 32.26 $F_{\rm OER}$ Reference [3] 6.83 16.22 9.75 8.4 10.3 Reference [2] 8.03 17.90 13.21 8.81 11.99 Proposed 12.70 9.67 8.47 25.01 13.96 Reference [8] 0.34 23.20 7.57 5.22 9.08 $F_{\rm AER}$ Reference [3] 7.53 30.74 11.86 36.05 21.55 Reference [2] 11.52 59.02 7.38 29.02 26.74 Proposed 2.39 19.81 14.57 5.81 10.65 Reference [8] 38.75 29.40 44.84 52.39 41.36 $F_{\rm TER}$ Reference [3] 14.36 46.96 21.61 44.45 31.85 Reference [2] 19.55 76.95 20.59 37.84 38.73 Proposed 15.09 29.48 23.03 30.82 24.61
下载: 导出CSV
表 3 较暗地物中阴影检测性能评价 (%)
Table 3 Detection performance evaluation of shadows in dark object (%)
Images Mecca Urban image 2 Urban image 3 Urban image 4 Average Reference [8] 53.51 36.88 31.32 33.87 38.90 $F_{\rm OER}$ Reference [3] 4.21 3.59 6.3 5.6 4.93 Reference [2] 15.50 18.11 7.17 8.12 12.23 Proposed 5.30 11.81 6.74 16.27 10.03 Reference [8] 1.13 1.39 0.56 2.25 1.33 $F_{\rm AER}$ Reference [3] 99.37 168.81 20.88 33.51 80.64 Reference [2] 45.83 3.42 22.85 30.01 25.53 Proposed 28.32 5.14 14.58 5.03 13.27 Reference [8] 54.64 38.28 31.87 36.12 40.23 $F_{\rm TER}$ Reference [3] 103.59 172.4 27.17 39.11 85.57 Reference [2] 61.33 21.53 30.02 38.13 37.75 Proposed 33.62 16.95 21.32 21.30 23.30
下载: 导出CSV
-
[1] 王卫国.高空间分辨率遥感影像阴影处理方法研究[硕士学位论文], 西安科技大学, 中国, 2008.Wang Wei-Guo. Study of Shadow Processing's Method in High-spatial Resolution RS Image[Master dissertation], Xi'an University of Science and Technology, China, 2008. [2] 高贤君, 万幼川, 杨元维, 何培培.高分辨率遥感影像阴影的自动检测与自动补偿.自动化学报, 2014, 40(8):1709-1720 http://www.aas.net.cn/CN/abstract/abstract18438.shtmlGao Xian-Jun, Wan You-Chuan, Yang Yuan-Wei, He Pei-Pei. Automatic shadow detection and automatic compensation in high resolution remote sensing images. Acta Automatica Sinica, 2014, 40(8):1709-1720 http://www.aas.net.cn/CN/abstract/abstract18438.shtml [3] 方菊芹, 陈帆, 和红杰, 尹忠科.结合局部分类水平集与颜色特征的遥感影像阴影检测.自动化学报, 2014, 40(6):1156-1165 http://www.aas.net.cn/CN/abstract/abstract18385.shtmlFang Ju-Qin, Chen Fan, He Hong-Jie, Yin Zhong-Ke. Shadow detection of remote sensing images based on local-classification level set and color feature. Acta Automatica Sinica, 2014, 40(6):1156-1165 http://www.aas.net.cn/CN/abstract/abstract18385.shtml [4] 夏怀英, 郭平.基于统计混合模型的遥感影像阴影检测.遥感学报, 2011, 15(4):778-791 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201104013.htmXia Huai-Ying, Guo Ping. A shadow detection of remote sensing images based on statistical texture features. Journal of Remote Sensing, 2011, 15(4):778-791 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201104013.htm [5] Makarau A, Richter R, Muller R, Reinartz P. Adaptive shadow detection using a blackbody radiator model. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6):2049-2059 doi: 10.1109/TGRS.2010.2096515 [6] 鲍海英, 李艳, 尹永宜.城市航空影像的阴影检测和阴影消除方法研究.遥感信息, 2010, (1):44-47 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXX201001010.htmBao Hai-Ying, Li Yan, Yin Yong-Yi. The study on shadow detection and shadow elimination in the urban aerial image. Remote Sensing Information, 2010, (1):44-47 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXX201001010.htm [7] Chung K L, Lin Y R, Huang Y H. Efficient shadow detection of color aerial images based on successive thresholding scheme. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(2):671-681 doi: 10.1109/TGRS.2008.2004629 [8] Liu J H, Fang T, Li D R. Shadow detection in remotely sensed images based on self-adaptive feature selection. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(12):5092-5103 doi: 10.1109/TGRS.2011.2158221 [9] Zhang H Y, Sun K M, Li W Z. Object-oriented shadow detection and removal from urban high-resolution remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(11):6972-6982 doi: 10.1109/TGRS.2014.2306233 [10] Lorenzi L, Melgani F, Mercier G. A complete processing chain for shadow detection and reconstruction in VHR images. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(9):3440-3452 doi: 10.1109/TGRS.2012.2183876 [11] Luo H, Shao Z F. A shadow detection method from urban high resolution remote sensing image based on color features of shadow. In:Proceedings of the 2012 International Symposium on Information Science and Engineering. Shanghai, China:IEEE, 2012. 48-51 [12] 方菊芹.遥感影像阴影检测与去除算法研究[硕士学位论文], 西南交通大学, 中国, 2014.Fang Ju-Qin. Research on Shadow Detection and Removal in Remote Sensing Images[Master dissertation], Southwest Jiaotong University, China, 2014. [13] Abraham L, Sasikumar M. An efficient shadow detection method for high resolution satellite images. In:Proceedings of the 3rd International Conference on Computing Communication and Networking Technologies. Coimbatore, India:IEEE, 2012. 1-5 [14] 刘辉, 谢天文.基于PCA与HIS模型的高分辨率遥感影像阴影检测研究.遥感技术与应用, 2013, 28(1):78-84 http://www.cnki.com.cn/Article/CJFDTOTAL-YGJS201301012.htmLiu Hui, Xie Tian-Wen. Study on shadow detection in high resolution remote sensing image based on PCA and HIS model. Remote Sensing Technology and Application. 2013, 28(1):78-84 http://www.cnki.com.cn/Article/CJFDTOTAL-YGJS201301012.htm [15] 杨俊, 赵忠明.基于归一化RGB色彩模型的阴影处理方法.光电工程, 2007, 34(12):92-96 http://www.cnki.com.cn/Article/CJFDTOTAL-GDGC200712022.htmYang Jun, Zhao Zhong-Ming. Shadow processing method based on normalized RGB color model. Opto-Electronic Engineering. 2007, 34(12):92-96 http://www.cnki.com.cn/Article/CJFDTOTAL-GDGC200712022.htm [16] 鞠何其.基于色彩空间变换的遥感影像阴影检测与去除技术[硕士学位论文], 上海交通大学, 中国, 2009.Ju He-Qi. A Fast Shadow Detection and Removal Algorithm for High Resolution Satellite Images[Master dissertation], Shanghai Jiao Tong University, China, 2009. [17] 王蜜蜂.遥感影像的阴影检测与补偿方法研究[硕士学位论文], 西安电子科技大学, 中国, 2011.Wang Mi-Feng. Research on Shadow Detection and Compensation in Remote Sensing Images[Master dissertation], Xi'an University of Science and Technology, China, 2011. [18] 段光耀, 宫辉力, 李小娟, 陈蓓蓓.结合特征分量构建和面向对象方法提取高分辨率卫星影像阴影.遥感学报, 2011, 18(4):760-770 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201404004.htmDuan Guang-Yao, Gong Hui-Li, Li Xiao-Juan, Chen Bei-Bei. Shadow extraction based on characteristic components and object-oriented method for high-resolution images. Journal of Remote Sensing, 2014, 18(4):760-770 http://www.cnki.com.cn/Article/CJFDTOTAL-YGXB201404004.htm [19] 高贤君, 万幼川, 郑顺义, 李健.航空遥感影像阴影的自动检测与补偿.武汉大学学报 (信息科学版), 2012, 37(11):1299-1302 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201211010.htmGao Xian-Jun, Wan You-Chuan, Zheng Shun-Yi, Li Jian. Automatic shadow detection and compensation of aerial remote sensing images. Geomatics and Information Science of Wuhan University, 2012, 37(11):1299-1302 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201211010.htm [20] 朱庆, 徐胜华, 韩李涛.基于D-S证据理论的彩色航空影像阴影提取方法.自动化学报, 2007, 33(6):588-595 http://www.aas.net.cn/CN/abstract/abstract14316.shtmlZhu Qing, Xu Sheng-Hua, Han Li-Tao. A new shadow extraction method from color aerial images based on Dempster-Shafer evidence theory. Acta Automatica Sinica, 2007, 33(6):588-595 http://www.aas.net.cn/CN/abstract/abstract14316.shtml [21] 王树根, 王军利, 王爱萍.基于整体变分模型的影像阴影检测算法研究.武汉大学学报 (信息科学版), 2006, 31(8):663-666 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH200608001.htmWang Shu-Gen, Wang Jun-Li, Wang Ai-Ping. Shadow detection and extraction from imagery based on total variation. Geomatics and Information Science of Wuhan University, 2006, 31(8):663-666 http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH200608001.htm [22] 严红萍, 俞兵.主成分分析在遥感图像处理中的应用.资源环境与工程, 2006, 20(2):168-170 http://www.cnki.com.cn/Article/CJFDTOTAL-DZRU201522085.htmYan Hong-Ping, Yu Bing. The principal component analysis for RS image processing. Resources Environment and Engineering, 2006, 20(2):168-170 http://www.cnki.com.cn/Article/CJFDTOTAL-DZRU201522085.htm [23] Rusinkiewicz S, Hall-Holt O, Levoy M. Real-time 3D model acquisition. ACM Transactions on Graphics, 2002, 21(3):438-446 -

 下载:
下载:




计量
- 文章访问数: 2005
- HTML全文浏览量: 242
- PDF下载量: 728
- 被引次数: 0
