

A New Sequential Monte Carlo Implementation of Cardinality Balanced Multi-target Multi-Bernoulli Filter
-
摘要: 为提升多伯努利滤波器序贯蒙特卡罗(Sequential Monte Carlo, SMC)实现中粒子采样的有效性,提出一种CBMeMBer辅助粒子滤波(Auxiliary particle filter, APF)实现的新方法.首先,利用多伯努利后验概率密度选择适合于CBMeMBer滤波器的辅助变量去重新定义采样问题.分别选择量测和先验密度分量作为辅助变量,确保最终的状态粒子能够集中在真实目标量测对应航迹的伯努利概率密度上进行采样,以使粒子向似然函数的峰值区移动,得到更为精确的多目标多伯努利(Multi-target multi-Bernoulli, MeMBer)后验概率密度的估计.同时,文中深入研究并给出了在量测更新和漏检情况下辅助变量以及多目标状态采样分布函数的设计,并研究利用渐近更新(Progressive correction, PC)算法对先验密度分量的量测更新进行迭代逼近计算,以提高最终分布函数求解的准确度.最后,针对两个典型非线性多目标跟踪问题的应用验证了算法的有效性.Abstract: To improve the effectiveness of particle sampling in the sequential Monte Carlo(SMC) implementation of the multi-Bernoulli filter, this paper proposes a new SMC implementation of the CBMeMBer filter using the so called auxiliary particle filter(APF). First, according to the posterior multi-Bernoulli density, this paper redefines the sampling problem by introducing some auxiliary random variables suited to the CBMeMBer filter. The measurement and the prior density component are chosen accordingly as auxiliary variables. As a result, this method can sample particles concentrating on the high likelihood state space and the Bernoulli probability density of track corrected by the actual target measurement. Therefore, a more accurate posterior probability density of multi-target multi-Bernoulli(MeMBer) can be obtained. Meanwhile, the sampling distribution functions of those auxiliary random variables and the multi-target states are designed for the legacy tracks and the measurement-corrected tracks. Moreover, this paper corrects iteratively the prior density component based on the progressive correction(PC) algorithm in order to improve the solving accuracy of sampling distribution functions. Finally, simulation results show the effectiveness of the proposed approach as applied to two typical nonlinear tracking problems.
-

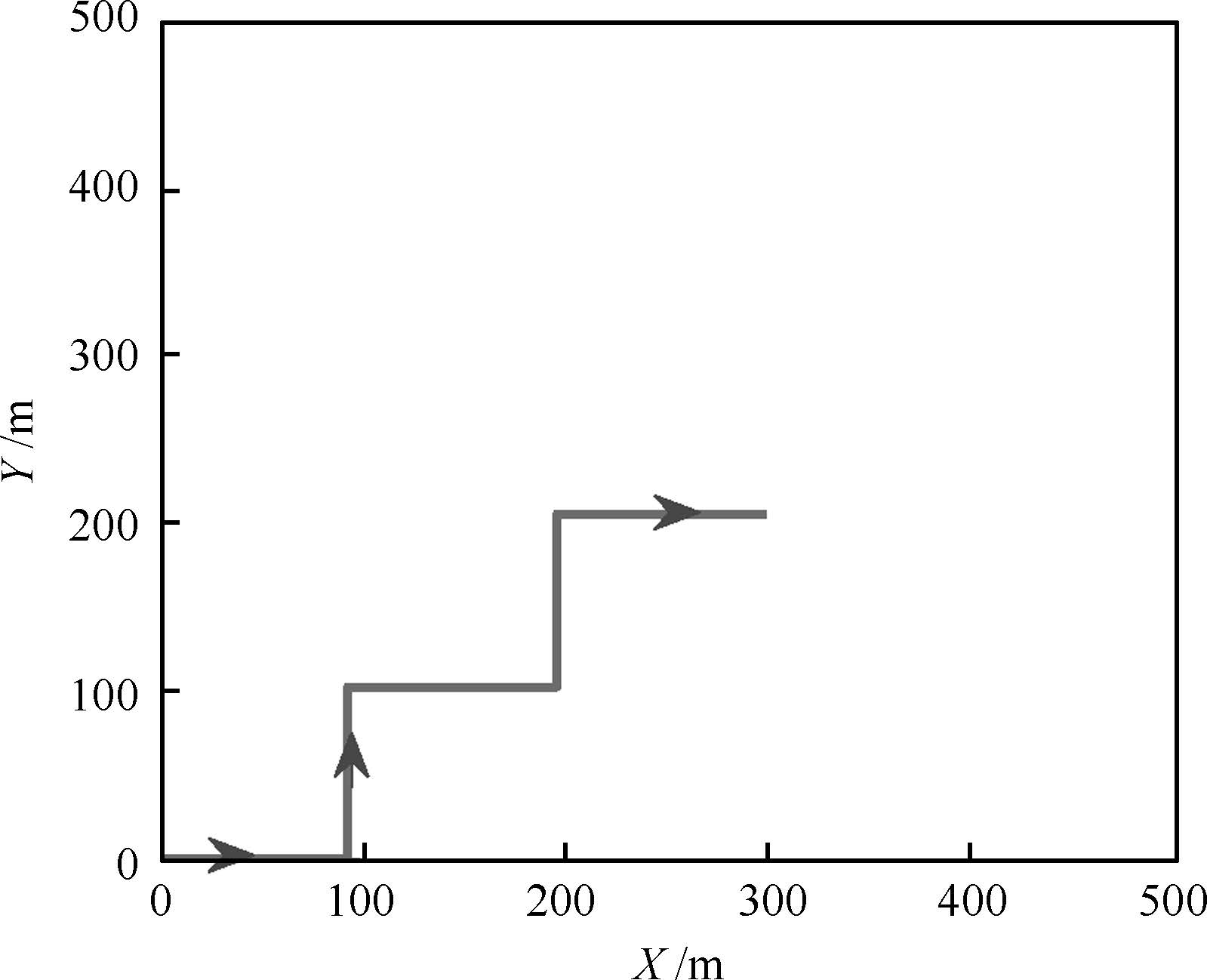
图 2 传统SMC-CBMeMBer滤波器的目标跟踪效果
Fig. 2 Target tracking with the traditional SMC-CBMeMBer filter
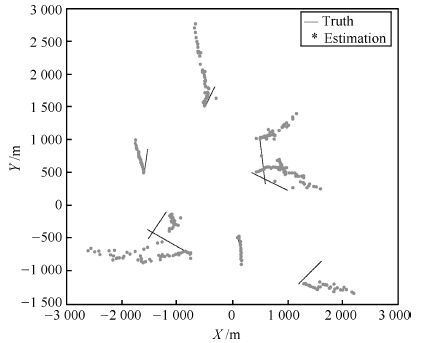
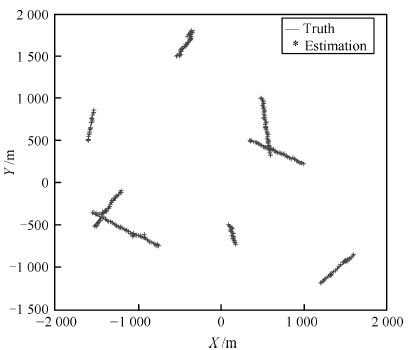
图 7 传统SMC-CBMeMBer滤波器的BOT跟踪效果
Fig. 7 Bearings-only tracking with the traditional SMC-CBMeMBer filter
表 1 不同采样规模下的性能比较
Table 1 Tracking performance versus sampling size
$L_s$ 100 300 500 1000 1500 BF OSPA~(m) 32.43 23.64 20.53 17.42 17.04 时间(s) 0.41 1.78 3.05 7.31 11.31 APF OSPA(m) 17.18 16.41 16.26 16.18 16.12 时间(s) 1.27 4.19 7.23 18.78 33.70  下载: 导出CSV
下载: 导出CSV
-
[1] Mahler R P S. Advances in Statistical Multisource-Multitarget Information Fusion. Norwood, MA:Artech House, 2014. 120-122 [2] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4):1152-1178 doi: 10.1109/TAES.2003.1261119 [3] Mahler R P S. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4):1523-1543 doi: 10.1109/TAES.2007.4441756 [4] Mahler R P S, Vo B T, Vo B N. CPHD filtering with unknown clutter rate and detection profile. IEEE Transactions on Signal Processing, 2011, 59(8):3497-3513 doi: 10.1109/TSP.2011.2128316 [5] Mahler R. Statistical Multisource Multitarget Information Fusion. Norwood, MA:Artech House, 2007. 655-667 [6] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2):409-423 doi: 10.1109/TSP.2008.2007924 [7] Reuter S, Vo B T, Vo B N, Dietmayer K. The labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2014, 62(12):3246-3260 doi: 10.1109/TSP.2014.2323064 [8] Chong N, Wong S, Vo B T, Sven N, Murray I. Multiple moving speaker tracking via degenerate unmixing estimation technique and cardinality balanced multi-target multi-Bernoulli filter(DUET-CBMeMBer). In:Proceedings of the 9th IEEE International Conference on Intelligent Sensors, Sensor Networks and Information Processing(ISSNIP). Singapore:IEEE, 2014. 1-6 [9] Beard M, Reuter S, Granstrom K, Vo B T, Vo B N, Scheel A. A generalised labelled multi-Bernoulli filter for extended multi-target tracking. In:Proceedings of the 18th International Conference on Information Fusion. Washington D.C.:IEEE, 2015. 991-998 [10] Hoang H G, Vo B T, Vo B N. A fast implementation of the generalized labeled multi-Bernoulli filter with joint prediction and update. In:Proceedings of the 18th International Conference on Information Fusion. Washington D.C.:IEEE, 2015. 999-1006 [11] Zhang G H, Lian F, Han C Z. CBMeMBer filters for nonstandard targets, I:Extended targets. In:Proceedings of the 17th International Conference on Information Fusion. Salamanca:IEEE, 2014. 1-6 [12] Hoseinnezhad R, Vo B N, Vo B T, Suter D. Bayesian integration of audio and visual information for multi-target tracking using a CB-MeMBer filter. In:Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing(ICASSP). Prague:IEEE, 2011. 2300-2303 [13] 连峰, 韩崇昭, 李晨. 多模型GM-CBMeMBer滤波器及航迹形成. 自动化学报, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtmlLian Feng, Han Chong-Zhao, Li Chen. Multiple-model GM-CBMeMBer filter and track continuity. Acta Automatica Sinica, 2014, 40(2):336-347 http://www.aas.net.cn/CN/abstract/abstract18295.shtml [14] Pitt M K, Shephard N. Filtering via simulation:auxiliary particle filters. Journal of the American Statistical Association, 1999, 94(446):590-599 doi: 10.1080/01621459.1999.10474153 [15] Ubeda-Medina L, Garcia-Fernandez A F, Grajal J. Generalizations of the auxiliary particle filter for multiple target tracking. In:Proceedings of the 17th Conference on Information Fusion. Salamanca:IEEE, 2014. 1-8 [16] Ristic B, Clark D, Vo B N. Improved SMC implementation of the PHD filter. In:Proceedings of the 13th Conference on Information Fusion. Edinburgh, UK:IEEE, 2010. 1-8 [17] Baser E, Efe M. A novel auxiliary particle PHD filter. In:Proceedings of the 15th International Conference on Information Fusion. Singapore:IEEE, 2012. 165-172 [18] Whiteley N, Singh S, Godsill S. Auxiliary particle implementation of probability hypothesis density filter. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3):1437-1454 doi: 10.1109/TAES.2010.5545199 [19] Doucet A, Godsill S, Andrieu C. On sequential Monte Carlo sampling methods for Bayesian filtering. Statistics and Computing, 2000, 10(3):197-208 doi: 10.1023/A:1008935410038 [20] Doucet A, Gordon N J, Krishnamurthy V. Particle filters for state estimation of jump Markov linear systems. IEEE Transactions on Signal Processing, 2001, 49(3):613-624 doi: 10.1109/78.905890 [21] Arulampalam M S, Maskell S, Gordon N, Clapp T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 2002, 50(2):174-188 doi: 10.1109/78.978374 [22] Musso C, Oudjane N, Le Gland F. Improving regularised particle filters. Sequential Monte Carlo Methods in Practice. New York:Springer-Verlag, 2001. 247-271 [23] Morelande M R, Skvortsov A. Radiation field estimation using a Gaussian mixture. In:Proceedings of the 12th International Conference on Information Fusion. Seattle, WA:IEEE, 2009. 2247-2254 [24] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8):3447-3457 doi: 10.1109/TSP.2008.920469 期刊类型引用(5)
1. 赵金成. 基于大数据分析的智能交通管理与安全监测系统研究. 信息与电脑(理论版). 2023(23): 106-108 .  百度学术
百度学术2. 王洋,董雪婷. 大数据在轨道交通客流预测中的应用——以芜湖市交通需求预测为例. 铁道勘察. 2022(05): 125-131+136 . 百度学术3. 郑荣,王晓宇,张艺源. 基于ACP理论的企业竞争情报智能系统构建研究. 情报理论与实践. 2021(12): 148-157 . 百度学术4. 杨林瑶,陈思远,王晓,张俊,王成红. 数字孪生与平行系统:发展现状、对比及展望. 自动化学报. 2019(11): 2001-2031 . 本站查看5. 侯国莲,弓林娟,苏烨,唐耀华. 基于ACP的平行发电控制系统. 智能科学与技术学报. 2019(03): 269-279 . 百度学术其他类型引用(5)
-



图(10) / 表(1)
计量
- 文章访问数: 2178
- HTML全文浏览量: 316
- PDF下载量: 1385
- 被引次数: 10
