2023年 第49卷 第8期
2023, 49(8): 1601-1620.
doi: 10.16383/j.aas.c220555
摘要:
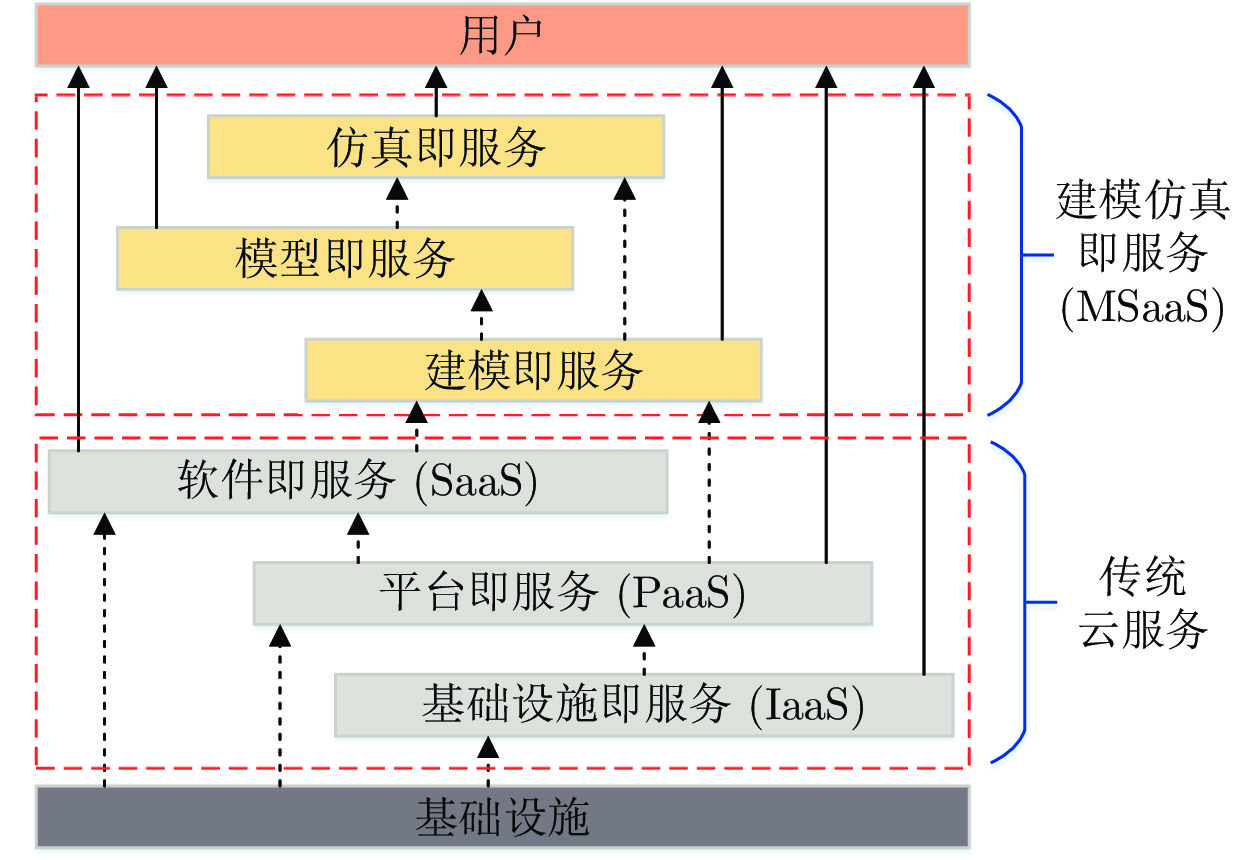
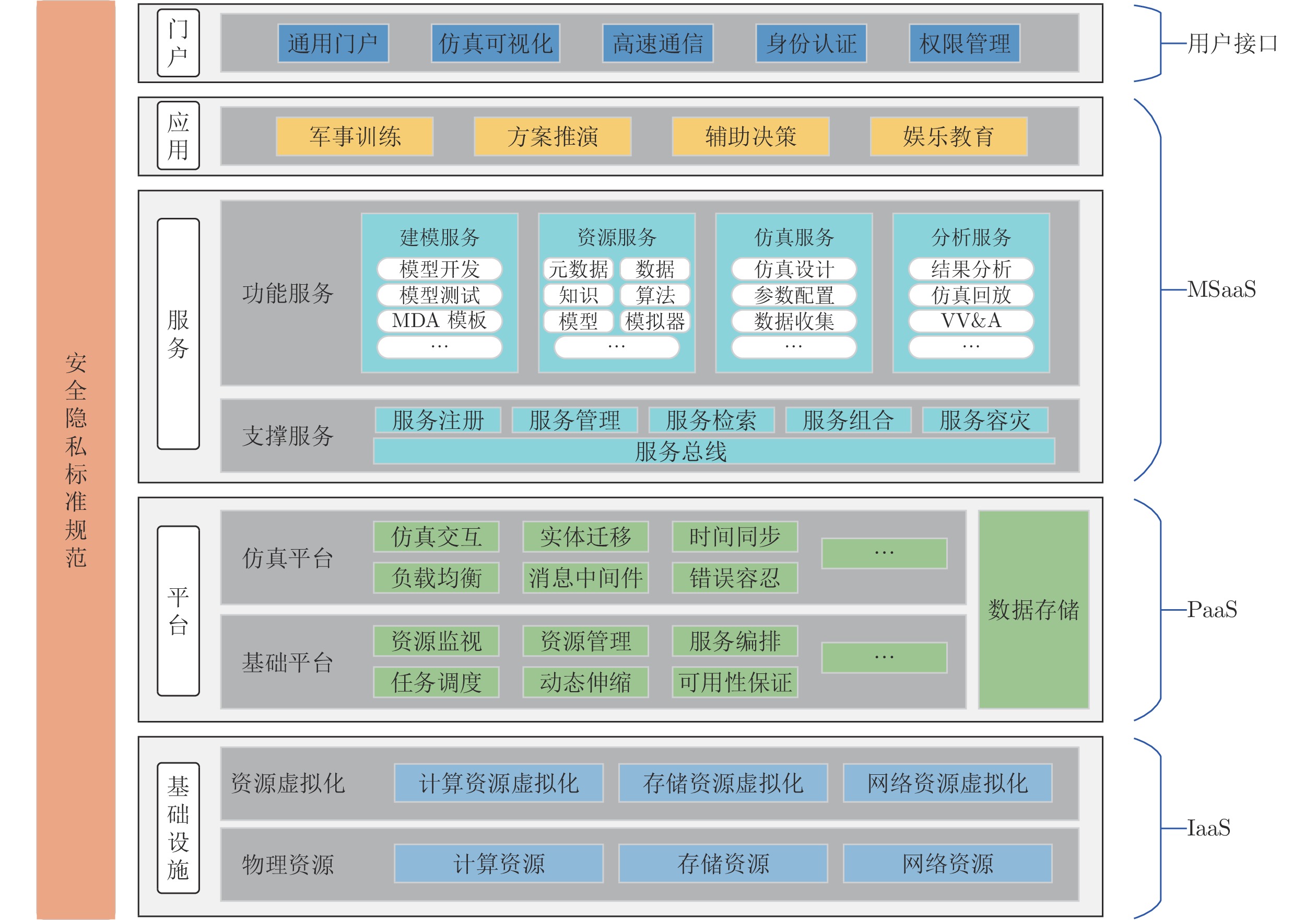
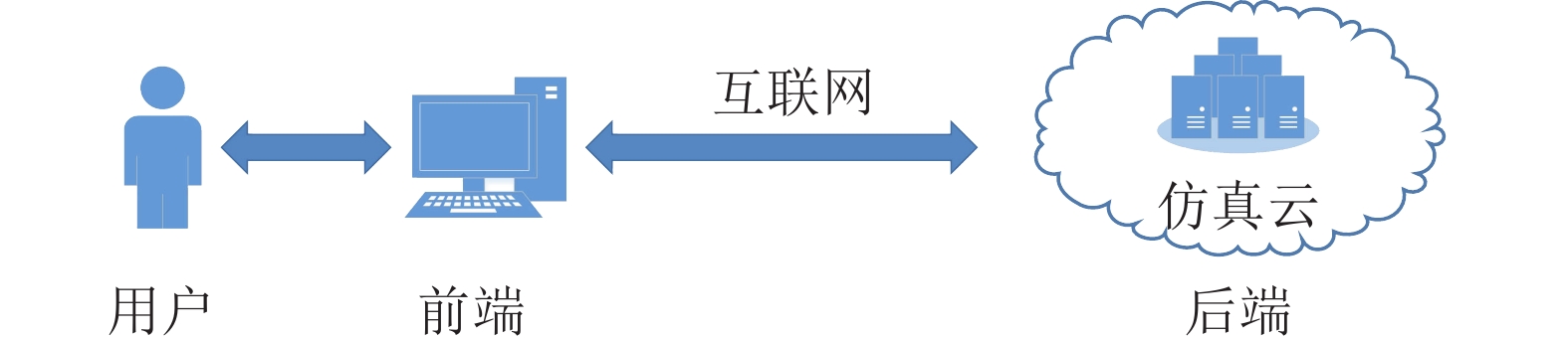
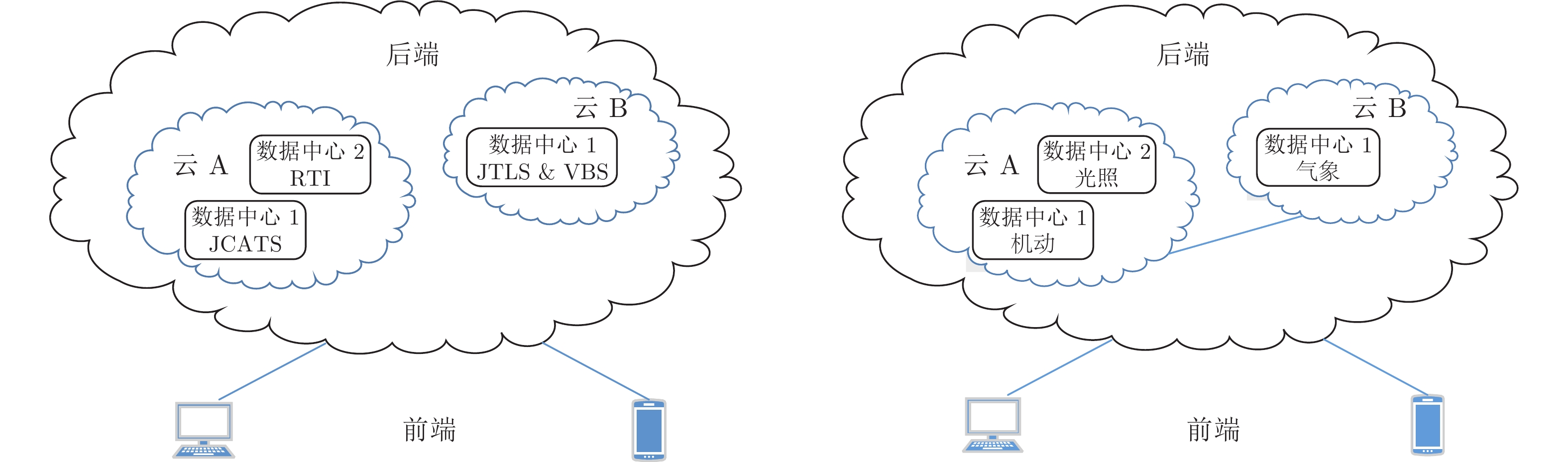
建模与仿真服务化是提升用户体验, 支撑按需访问建模与仿真能力的有效手段. 本文首先从建模与仿真服务的访问、开发以及运行与管理三个层面对建模与仿真服务化的概念进行辨析; 并从服务的分类、抽象层级、基本元素和状态四个角度对建模与仿真服务的特征进行阐述. 然后从基于网页的仿真、基于面向服务架构 (Service oriented architecture, SOA) 的仿真系统开发和服务化基础设施三个维度对建模与仿真服务化的发展历程进行梳理. 在此基础之上, 分析了基于云的建模与仿真服务化的构建原则、基本架构和应用模式, 并从访问、开发以及运行与管理三个层面给出建模与仿真服务化相关的支撑技术. 最后, 从理论体系、关键技术和新兴技术三个方面给出进一步发展建模与仿真服务化的建议.
建模与仿真服务化是提升用户体验, 支撑按需访问建模与仿真能力的有效手段. 本文首先从建模与仿真服务的访问、开发以及运行与管理三个层面对建模与仿真服务化的概念进行辨析; 并从服务的分类、抽象层级、基本元素和状态四个角度对建模与仿真服务的特征进行阐述. 然后从基于网页的仿真、基于面向服务架构 (Service oriented architecture, SOA) 的仿真系统开发和服务化基础设施三个维度对建模与仿真服务化的发展历程进行梳理. 在此基础之上, 分析了基于云的建模与仿真服务化的构建原则、基本架构和应用模式, 并从访问、开发以及运行与管理三个层面给出建模与仿真服务化相关的支撑技术. 最后, 从理论体系、关键技术和新兴技术三个方面给出进一步发展建模与仿真服务化的建议.

2023, 49(8): 1621-1634.
doi: 10.16383/j.aas.c201035
摘要:
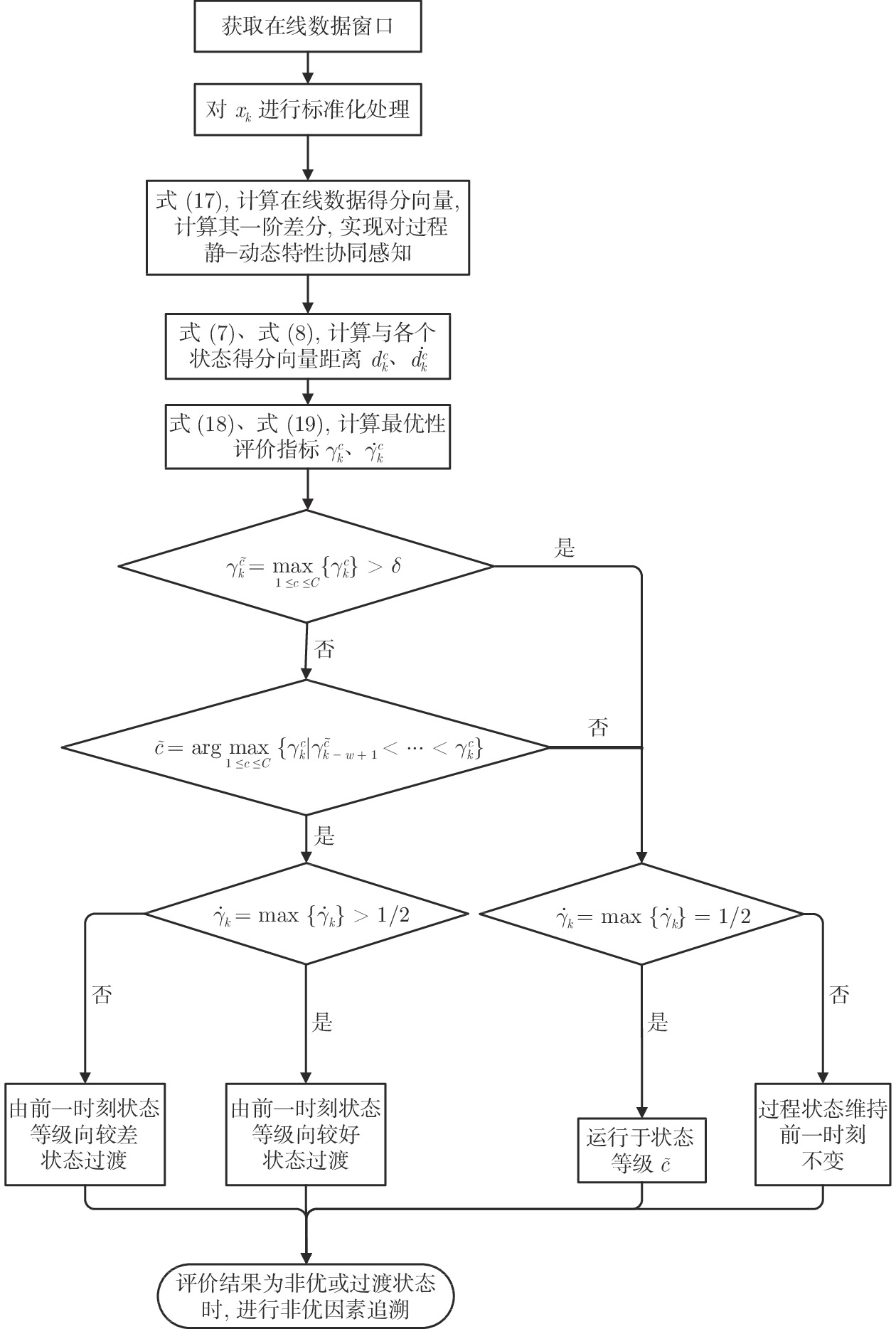
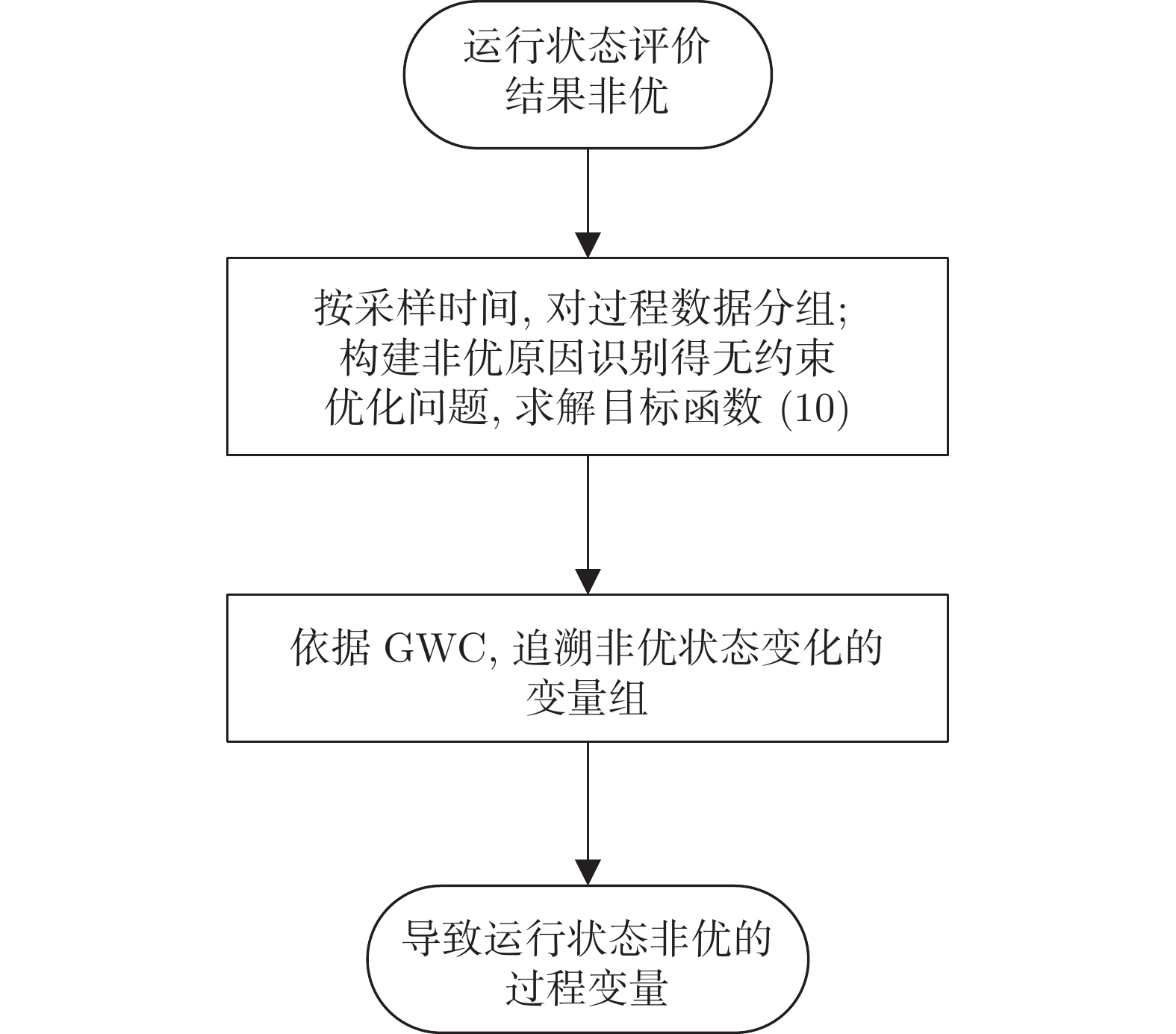
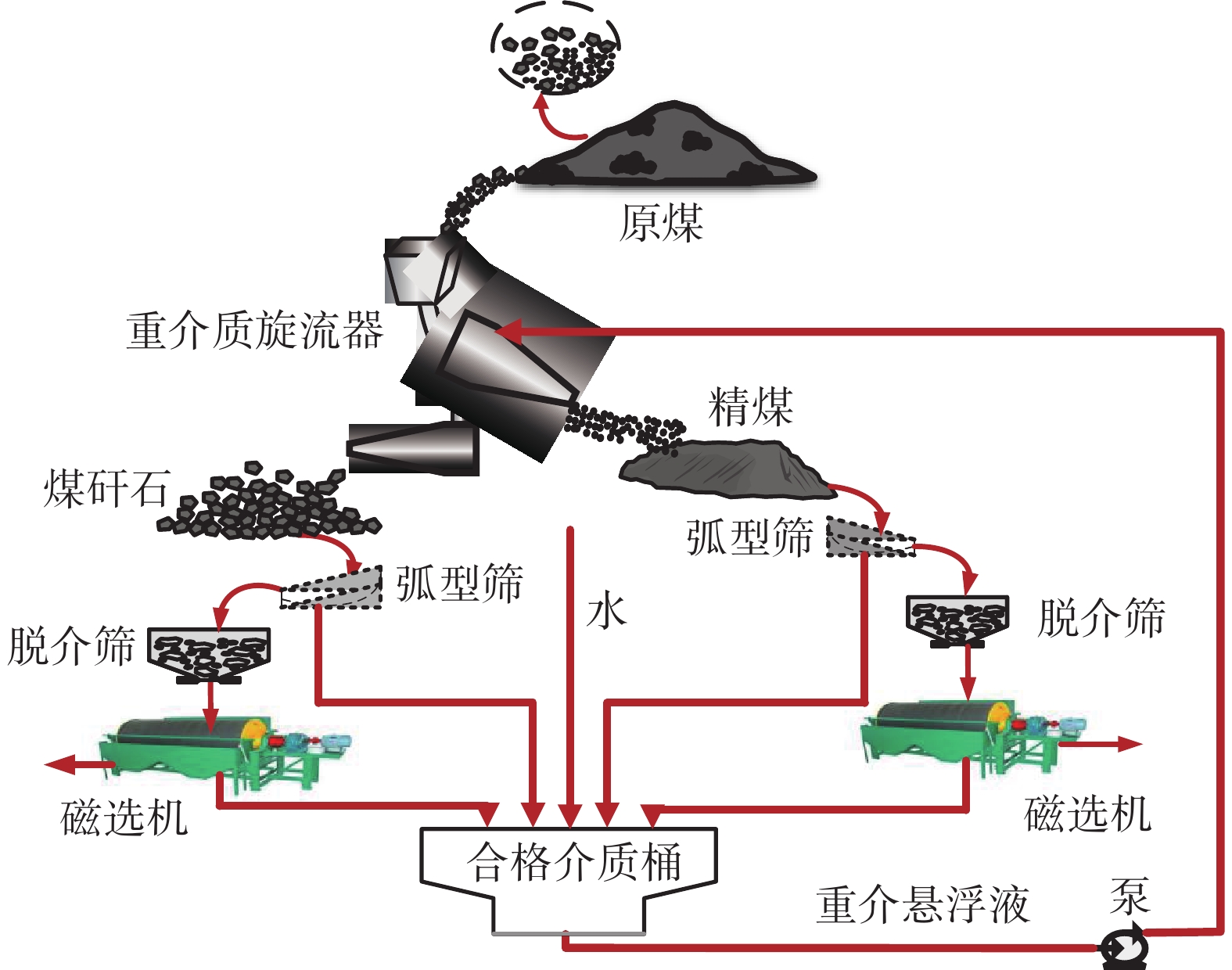
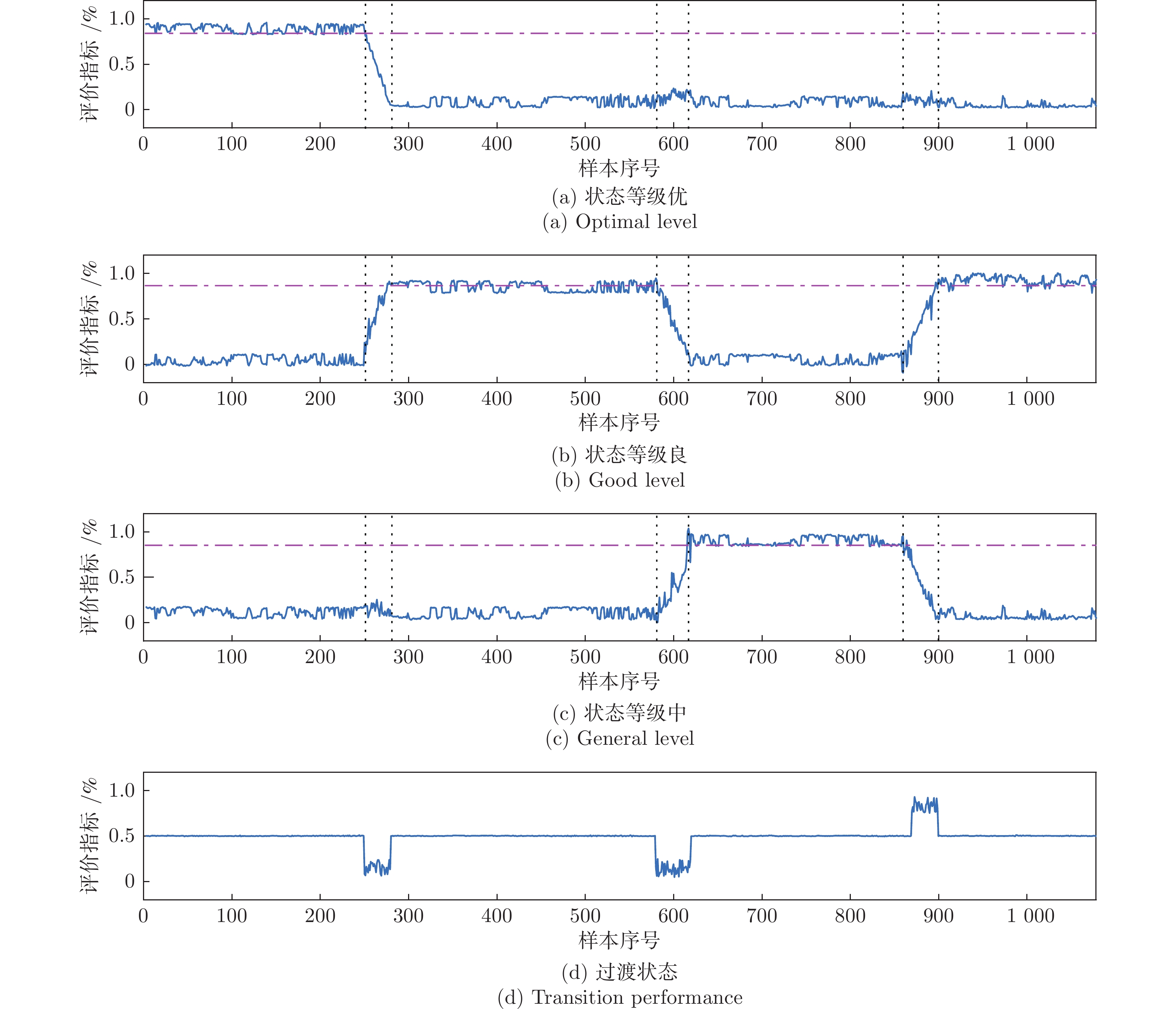
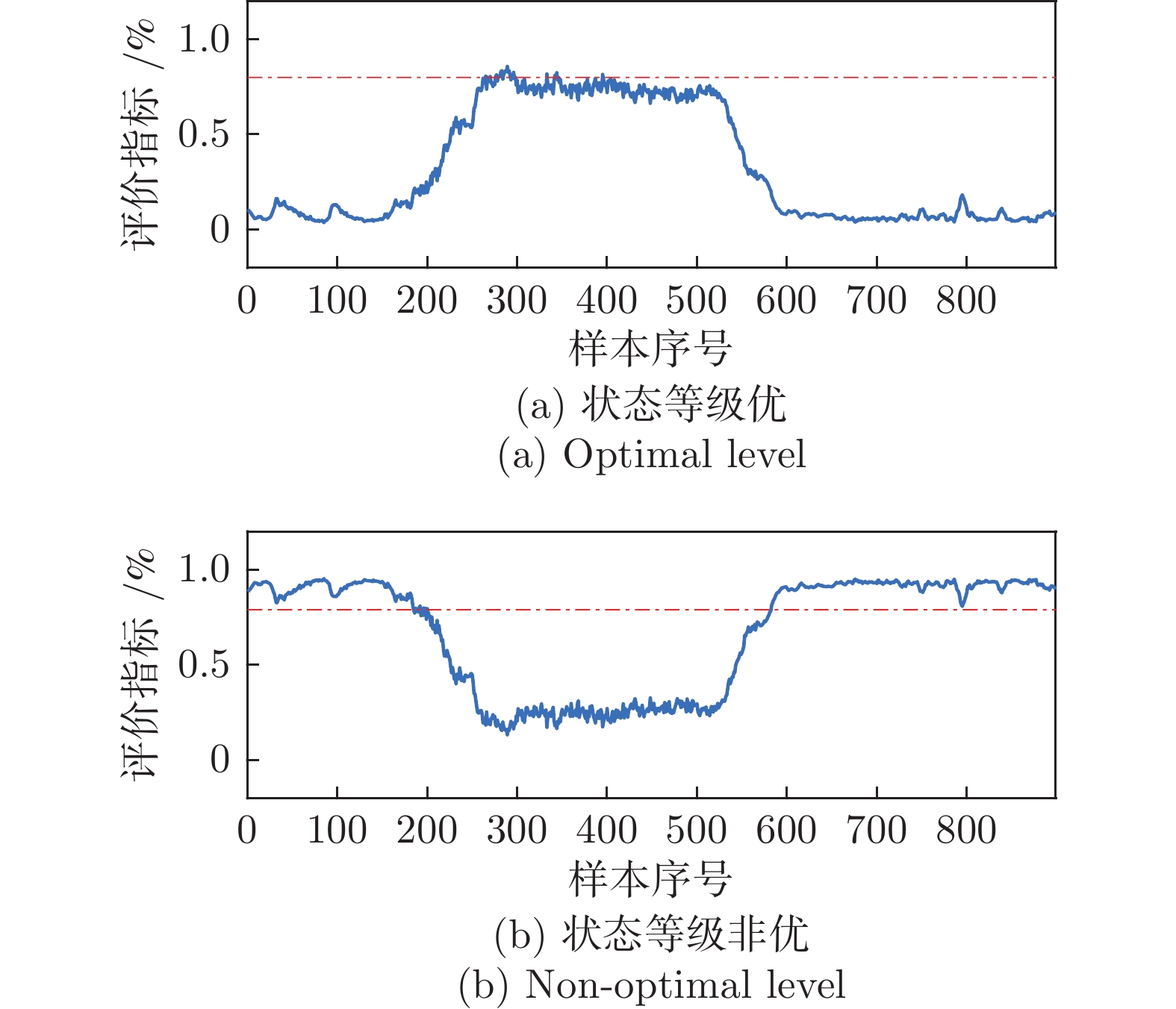
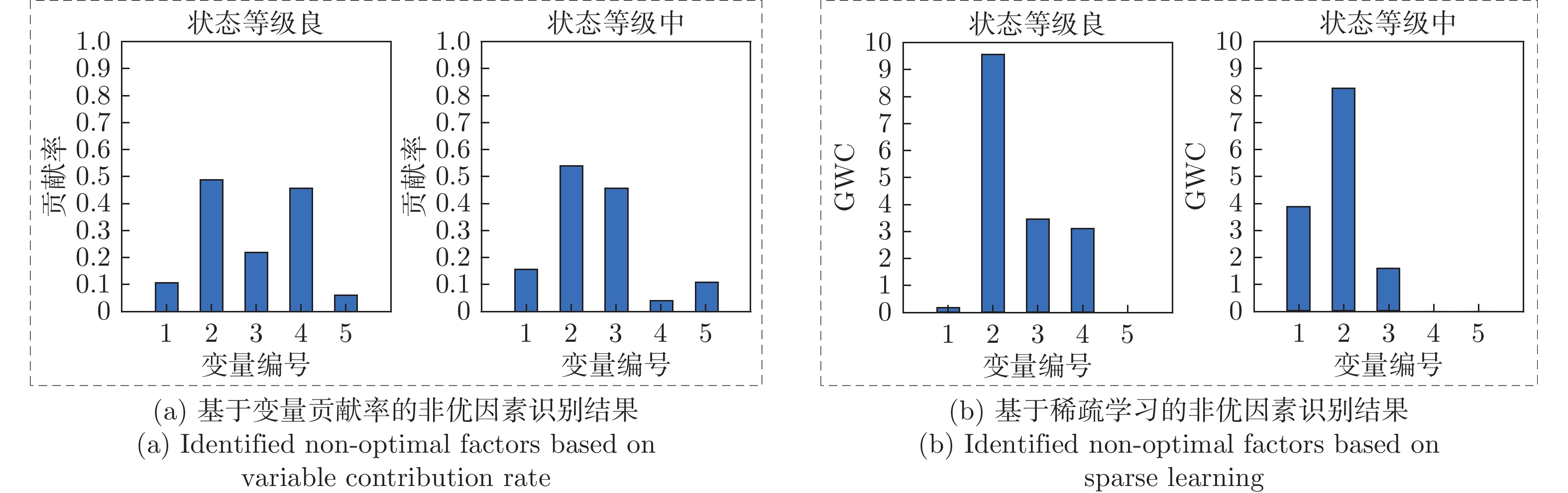
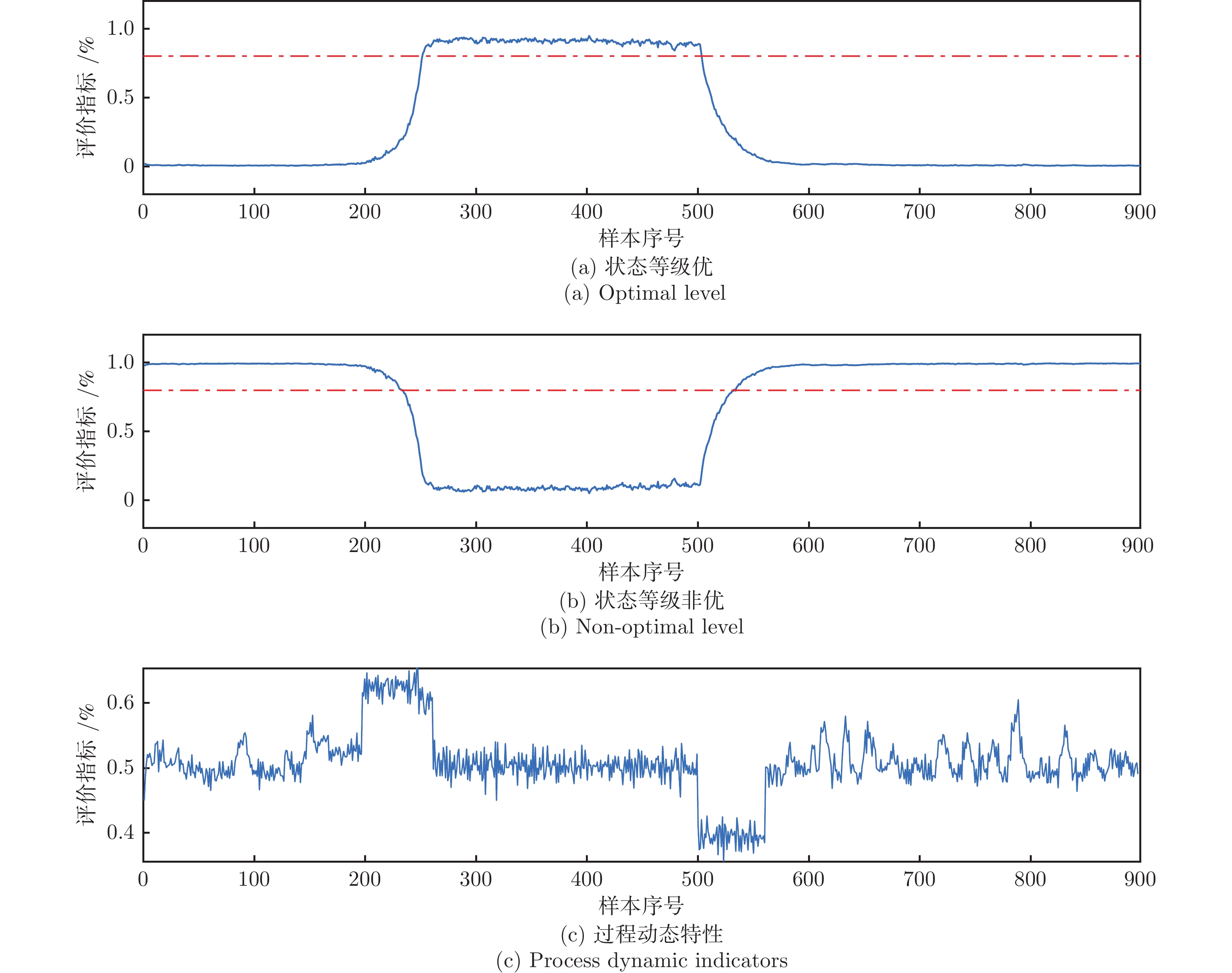
针对当前过程监测和运行状态评价方法等对工况信息感知不全面、漏报和误报现象严重等问题, 在深入研究工业现场数据静−动态特性协同感知方法的基础上, 提出关键性能指标(Key performance indicators, KPI)驱动的慢特征分析(Slow feature analysis, SFA)算法. 将关键性能指标信息融入到慢特征分析中, 协同感知复杂工业过程的静−动态特性变化, 并进一步通过计算潜变量之间的相似度及其一阶差分间的相似度实现对过程稳态和过渡的评价. 在此基础上, 建立基于静−动态特性协同感知的过程运行状态评价统一框架. 针对非优状态, 提出基于稀疏学习的非优因素识别方法, 实现对非优因素变量的准确识别. 最后, 通过重介质选煤过程实际生产数据和田纳西·伊斯曼(Tennessee Eastman, TE)过程数据验证了该方法的有效性.
针对当前过程监测和运行状态评价方法等对工况信息感知不全面、漏报和误报现象严重等问题, 在深入研究工业现场数据静−动态特性协同感知方法的基础上, 提出关键性能指标(Key performance indicators, KPI)驱动的慢特征分析(Slow feature analysis, SFA)算法. 将关键性能指标信息融入到慢特征分析中, 协同感知复杂工业过程的静−动态特性变化, 并进一步通过计算潜变量之间的相似度及其一阶差分间的相似度实现对过程稳态和过渡的评价. 在此基础上, 建立基于静−动态特性协同感知的过程运行状态评价统一框架. 针对非优状态, 提出基于稀疏学习的非优因素识别方法, 实现对非优因素变量的准确识别. 最后, 通过重介质选煤过程实际生产数据和田纳西·伊斯曼(Tennessee Eastman, TE)过程数据验证了该方法的有效性.


2023, 49(8): 1635-1644.
doi: 10.16383/j.aas.c200486
摘要:
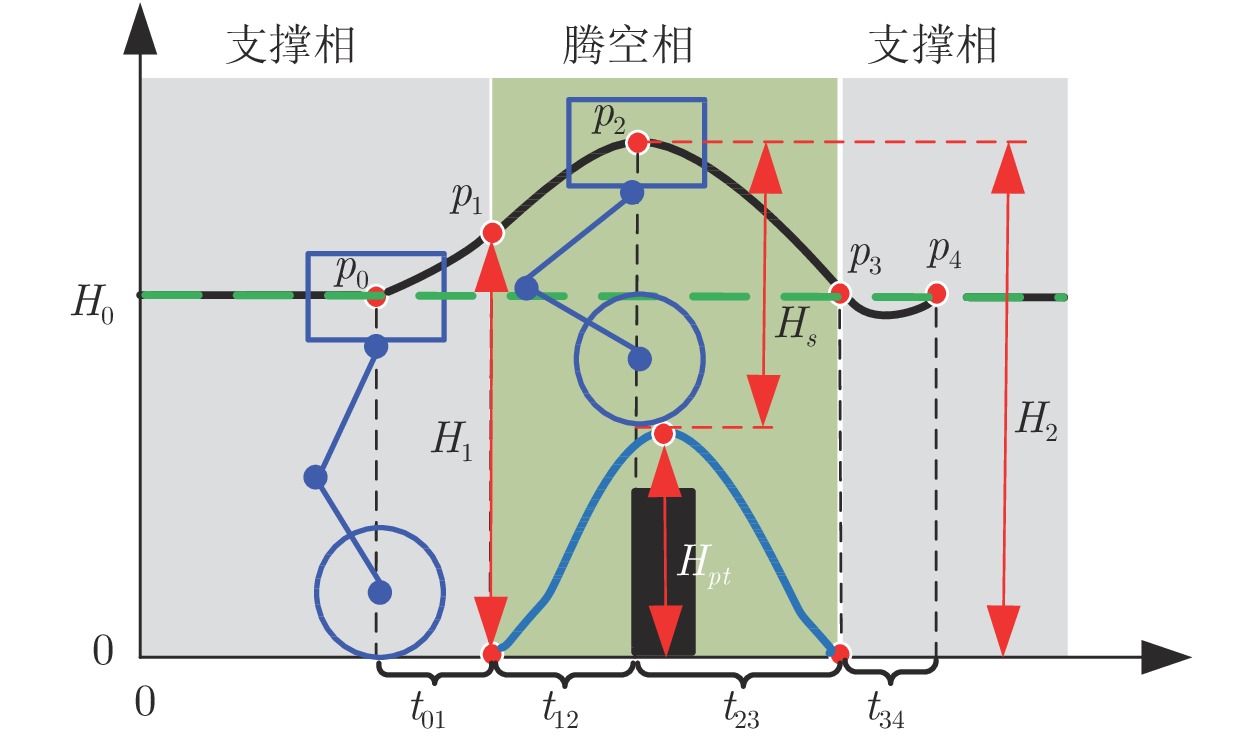
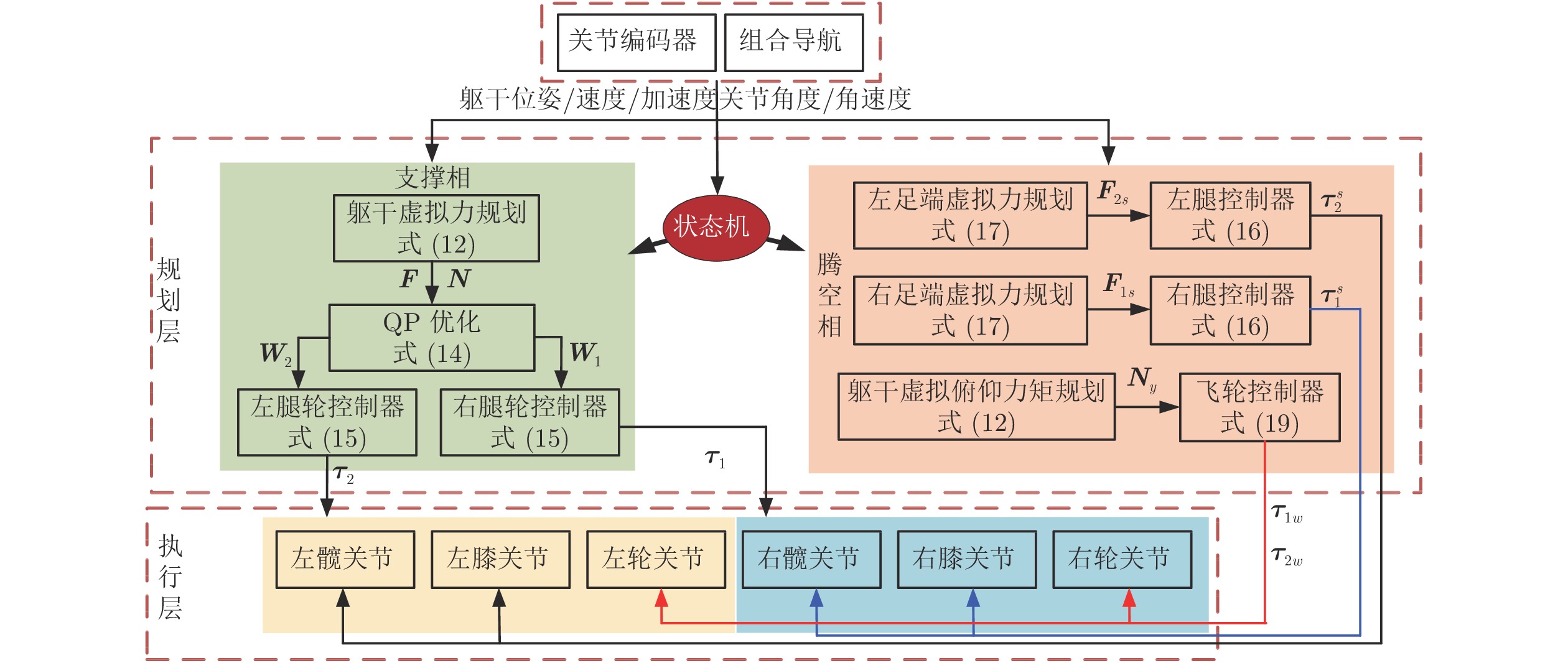
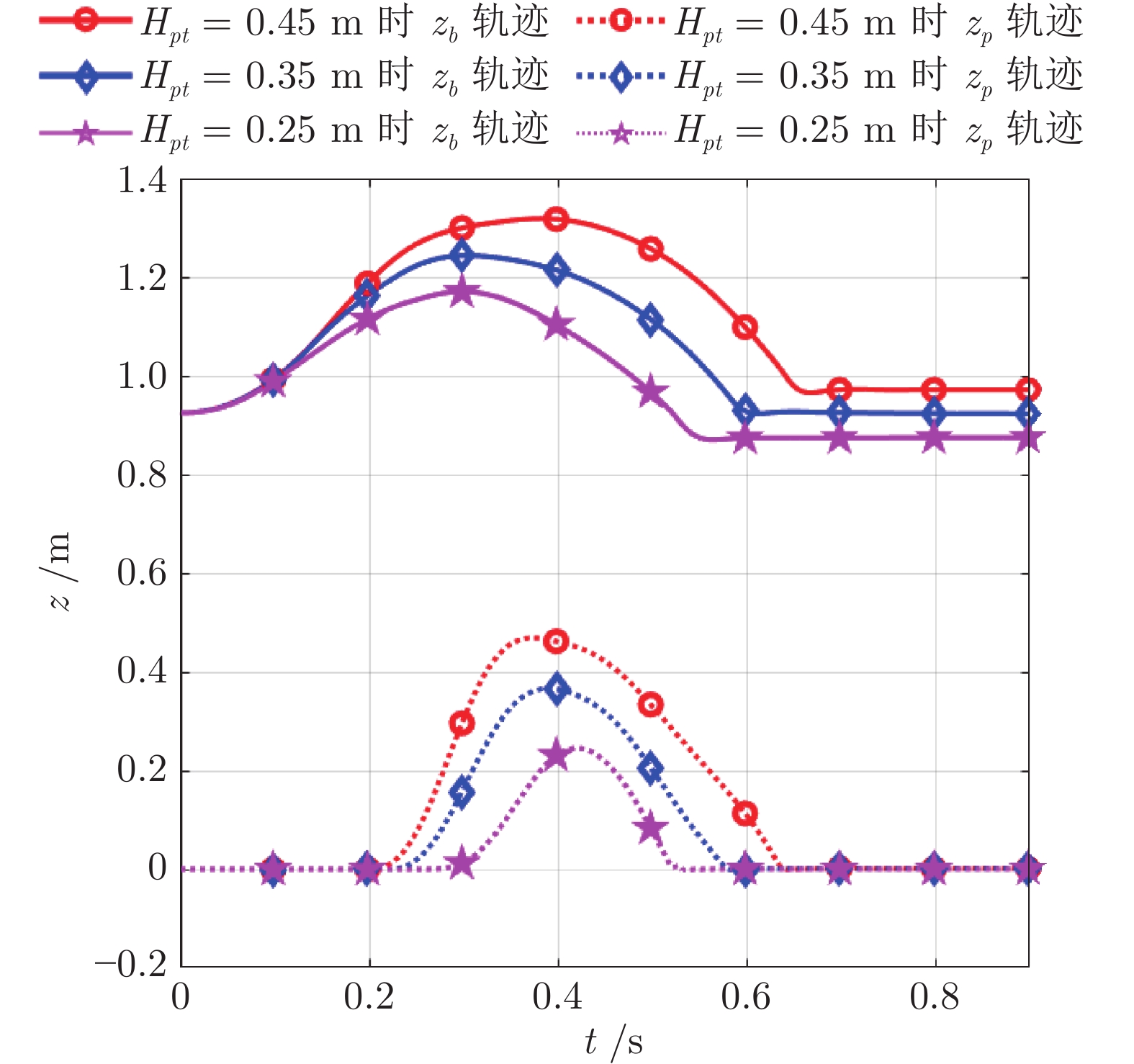
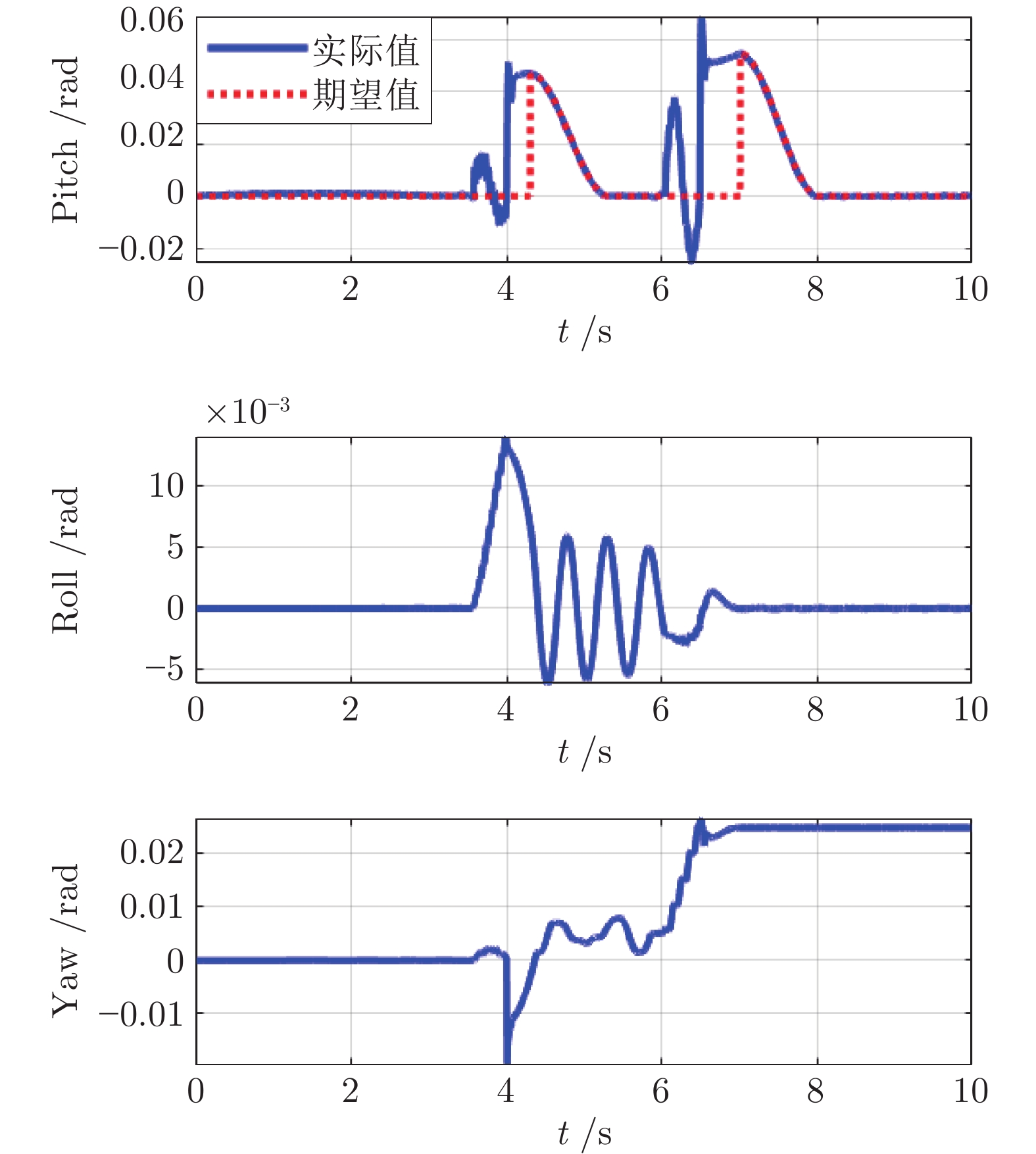
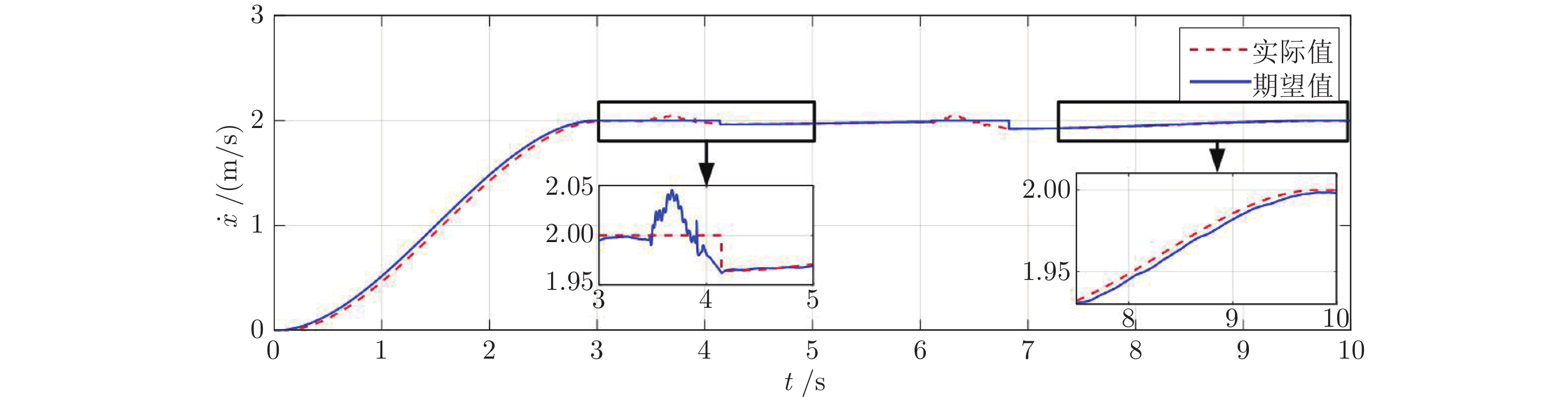
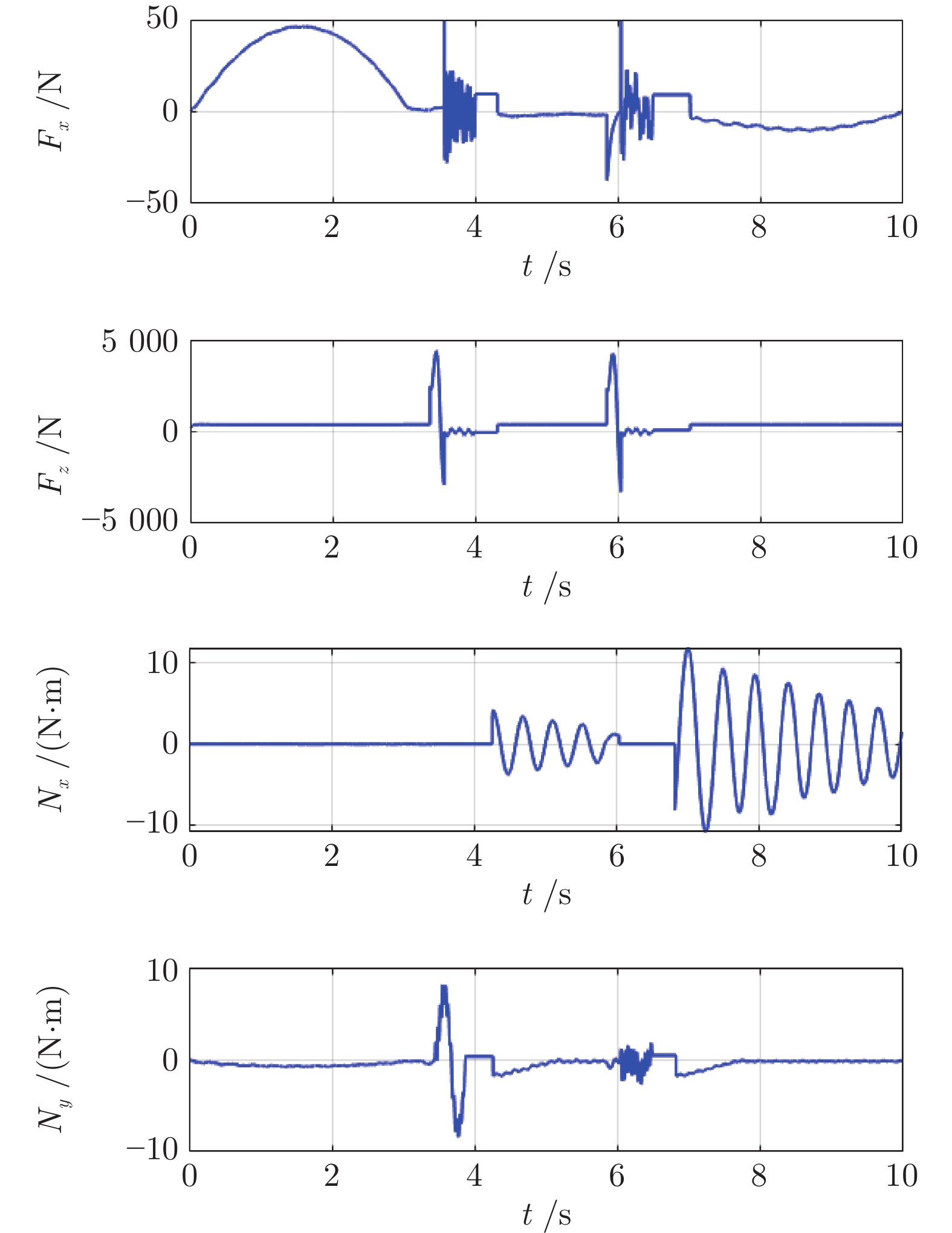
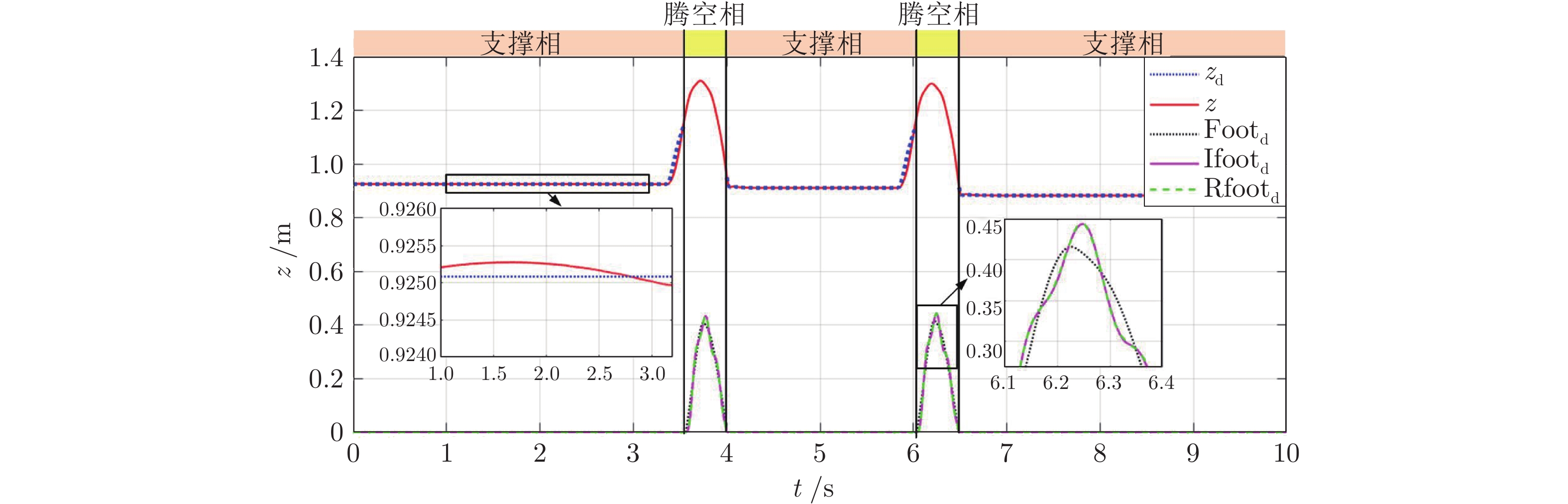
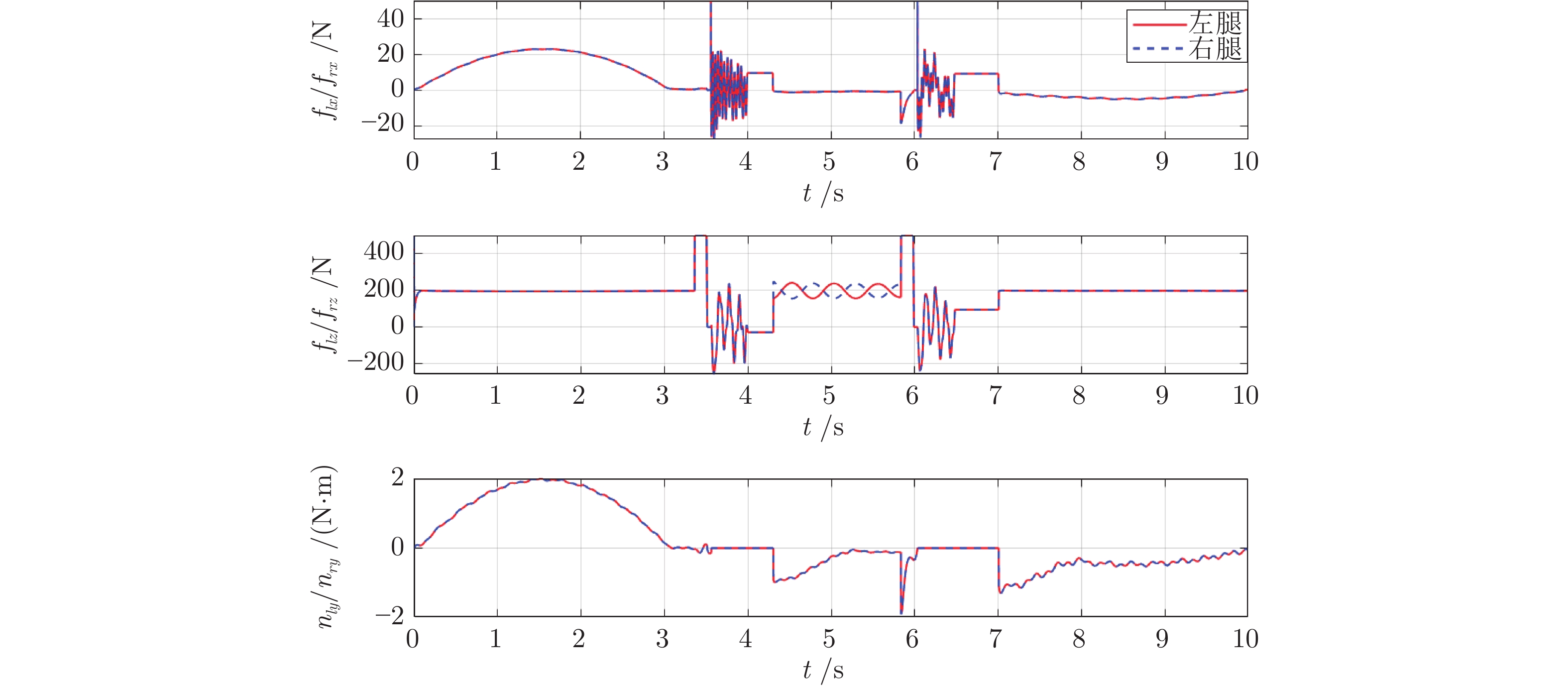
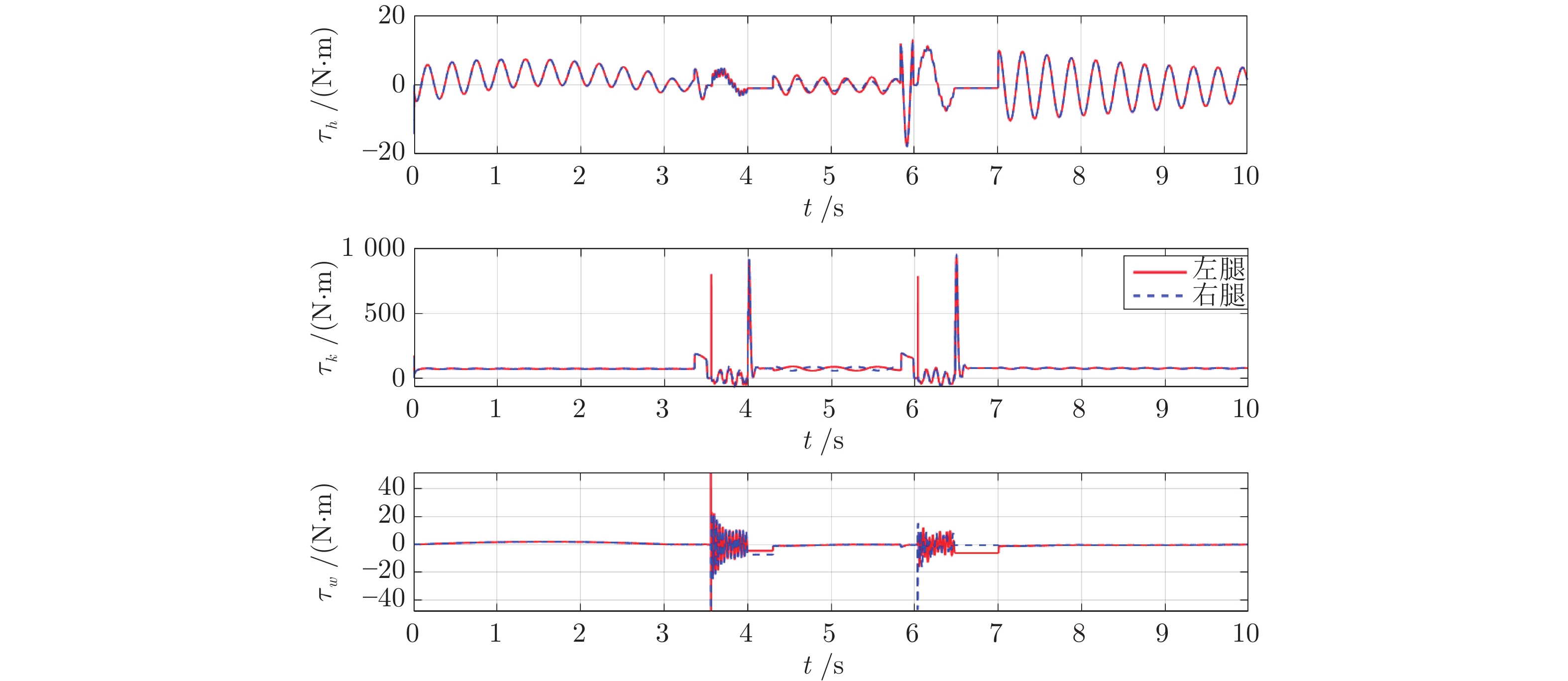
双腿轮机器人由于内在不稳定性以及强耦合非线性特性, 其运动控制尤其是高动态运动控制非常困难. 为此, 提出基于最优力分配的全身力矩控制框架, 可同时实现双腿轮机器人的自平衡与躯干位姿控制; 为提高双腿轮机器人在高速运动时跨越垂直障碍物的能力, 提出应对垂直障碍的跳跃动作规划方法, 并基于全身力矩控制框架进行控制与实现; 通过分析简化的轮式倒立摆模型, 得到腾空时飞轮转动对俯仰姿态的动力学影响, 实现腾空阶段俯仰姿态的调整. 设置连续跳跃仿真实验与有无飞轮调整的俯仰姿态对比实验, 其仿真结果证明所提方法的有效性与鲁棒性.
双腿轮机器人由于内在不稳定性以及强耦合非线性特性, 其运动控制尤其是高动态运动控制非常困难. 为此, 提出基于最优力分配的全身力矩控制框架, 可同时实现双腿轮机器人的自平衡与躯干位姿控制; 为提高双腿轮机器人在高速运动时跨越垂直障碍物的能力, 提出应对垂直障碍的跳跃动作规划方法, 并基于全身力矩控制框架进行控制与实现; 通过分析简化的轮式倒立摆模型, 得到腾空时飞轮转动对俯仰姿态的动力学影响, 实现腾空阶段俯仰姿态的调整. 设置连续跳跃仿真实验与有无飞轮调整的俯仰姿态对比实验, 其仿真结果证明所提方法的有效性与鲁棒性.



2023, 49(8): 1645-1655.
doi: 10.16383/j.aas.c210080
摘要:
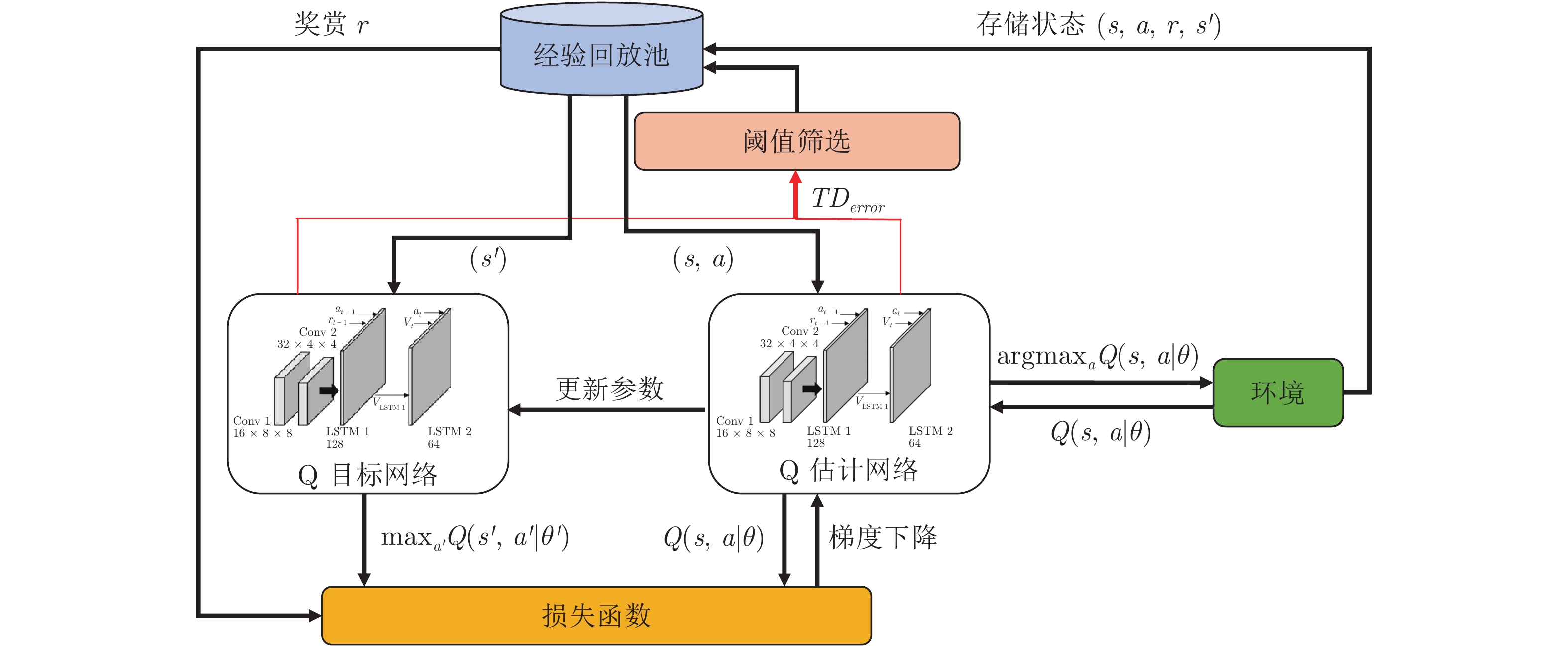
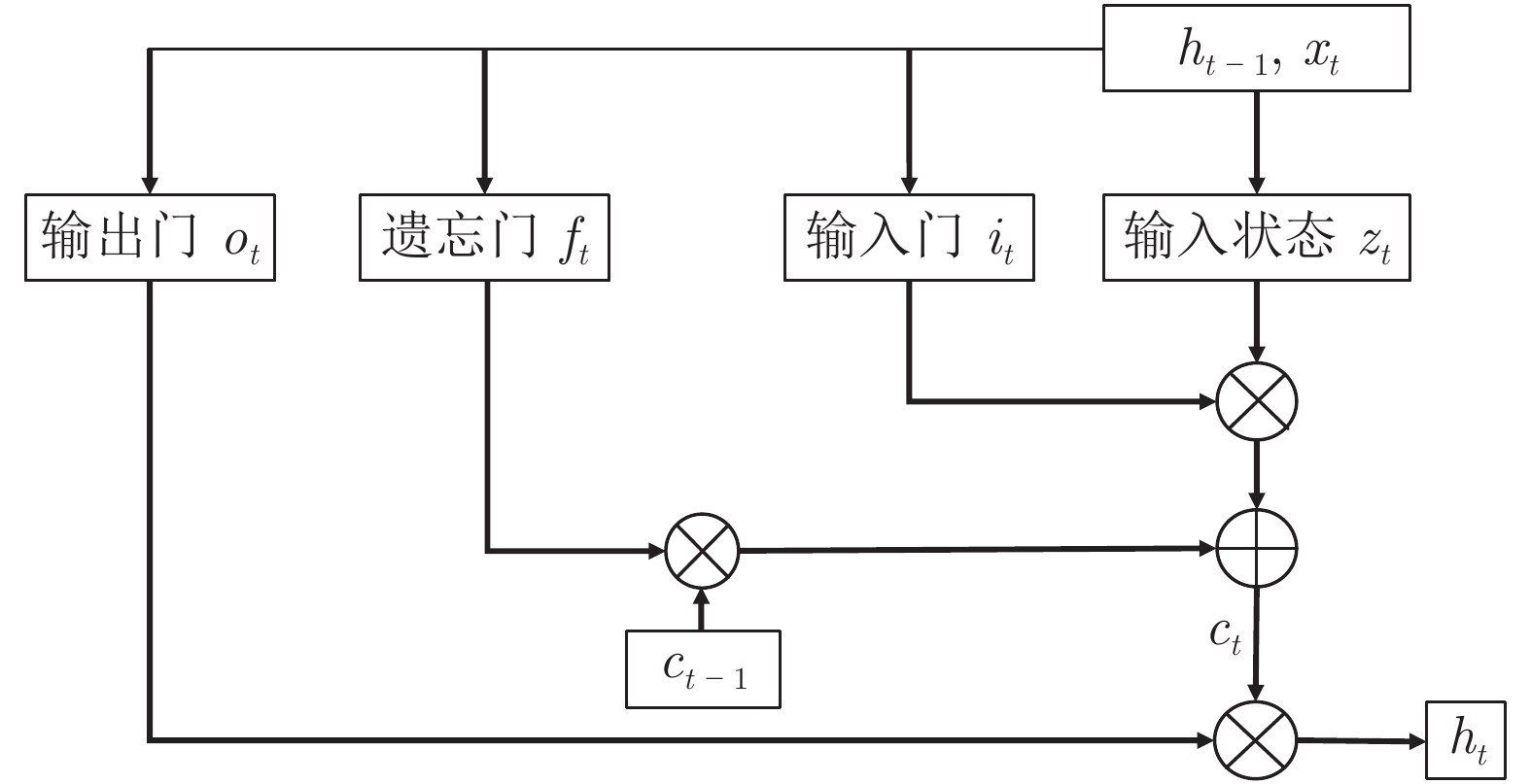
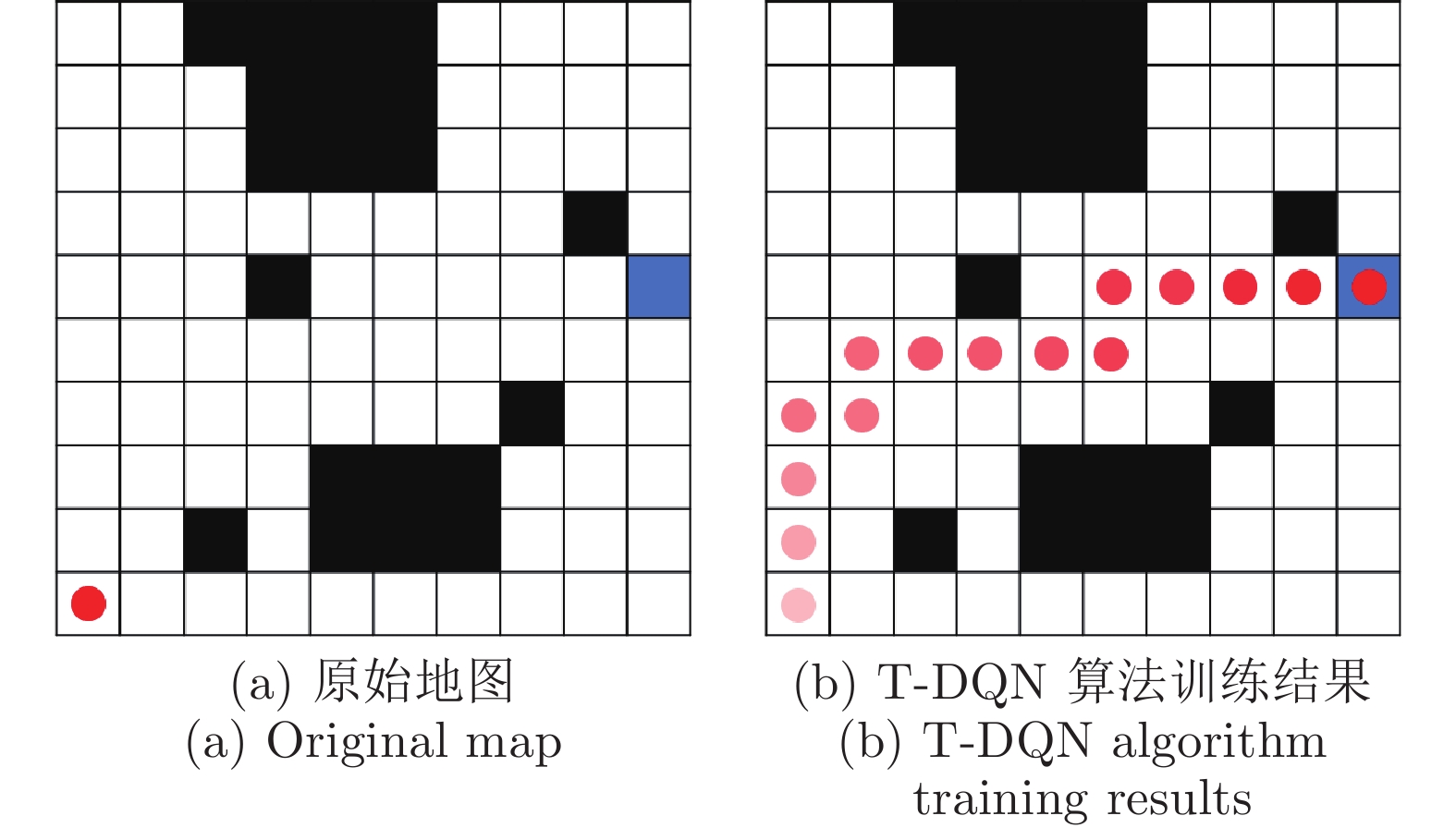
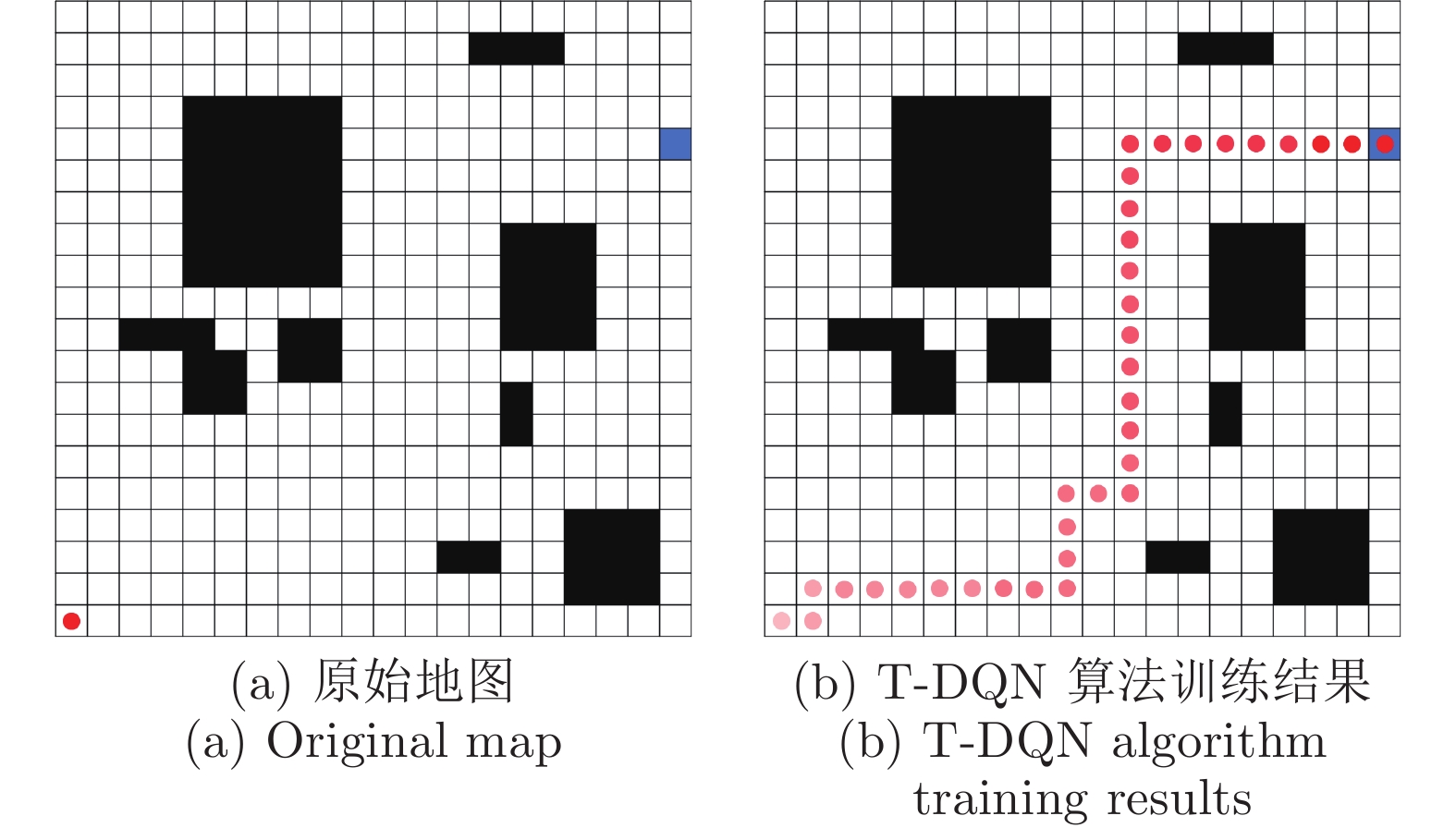
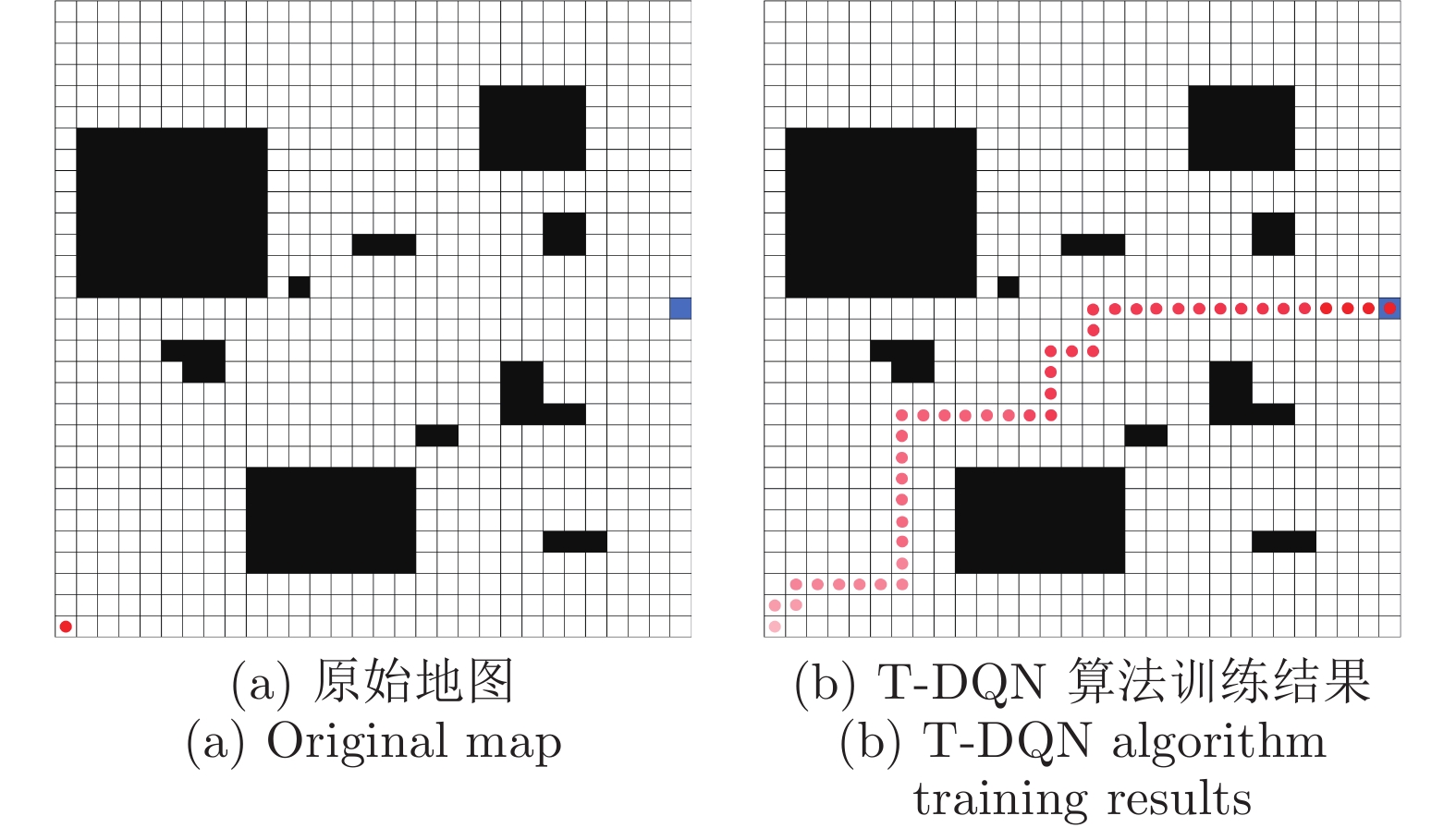
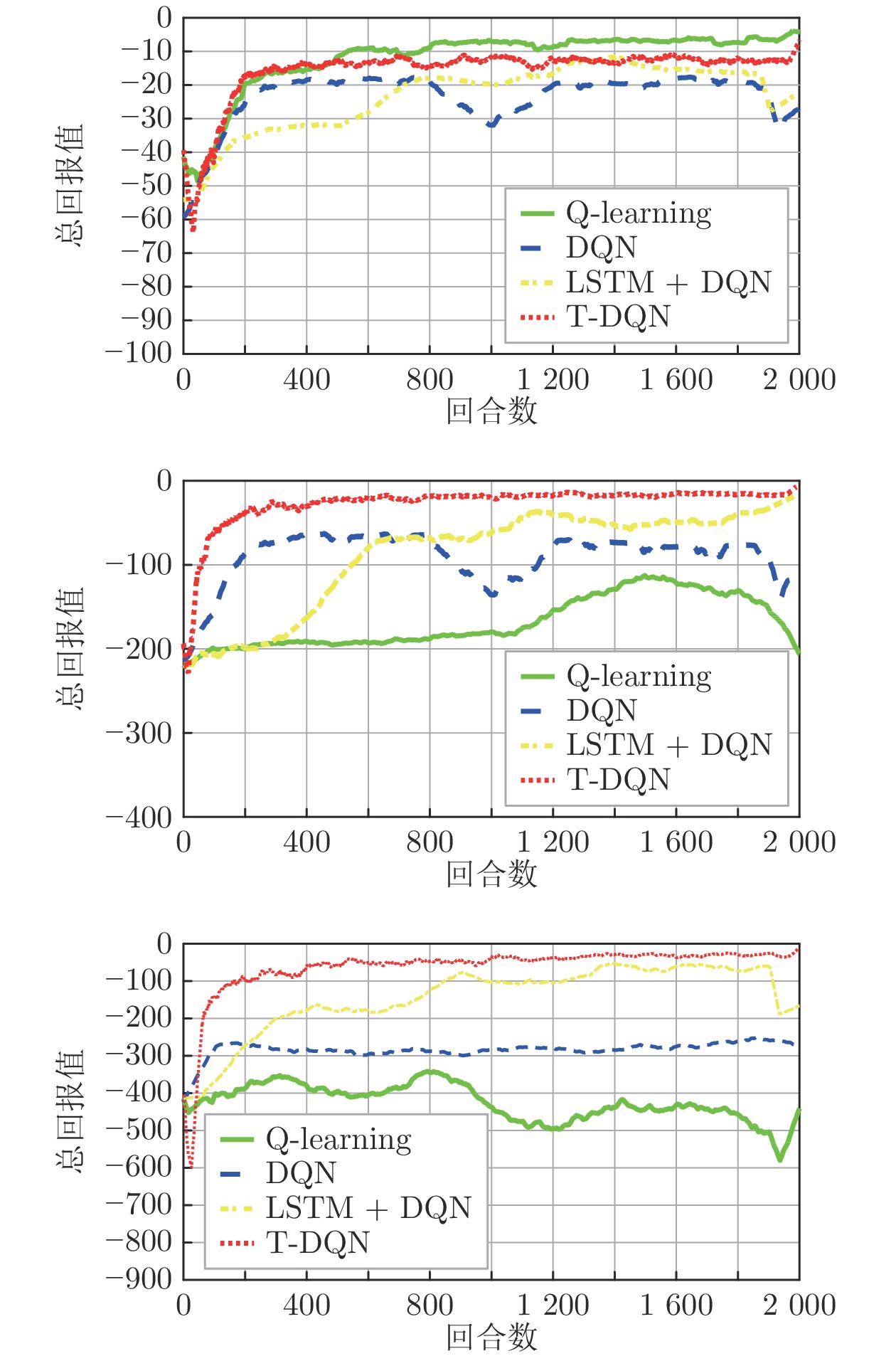
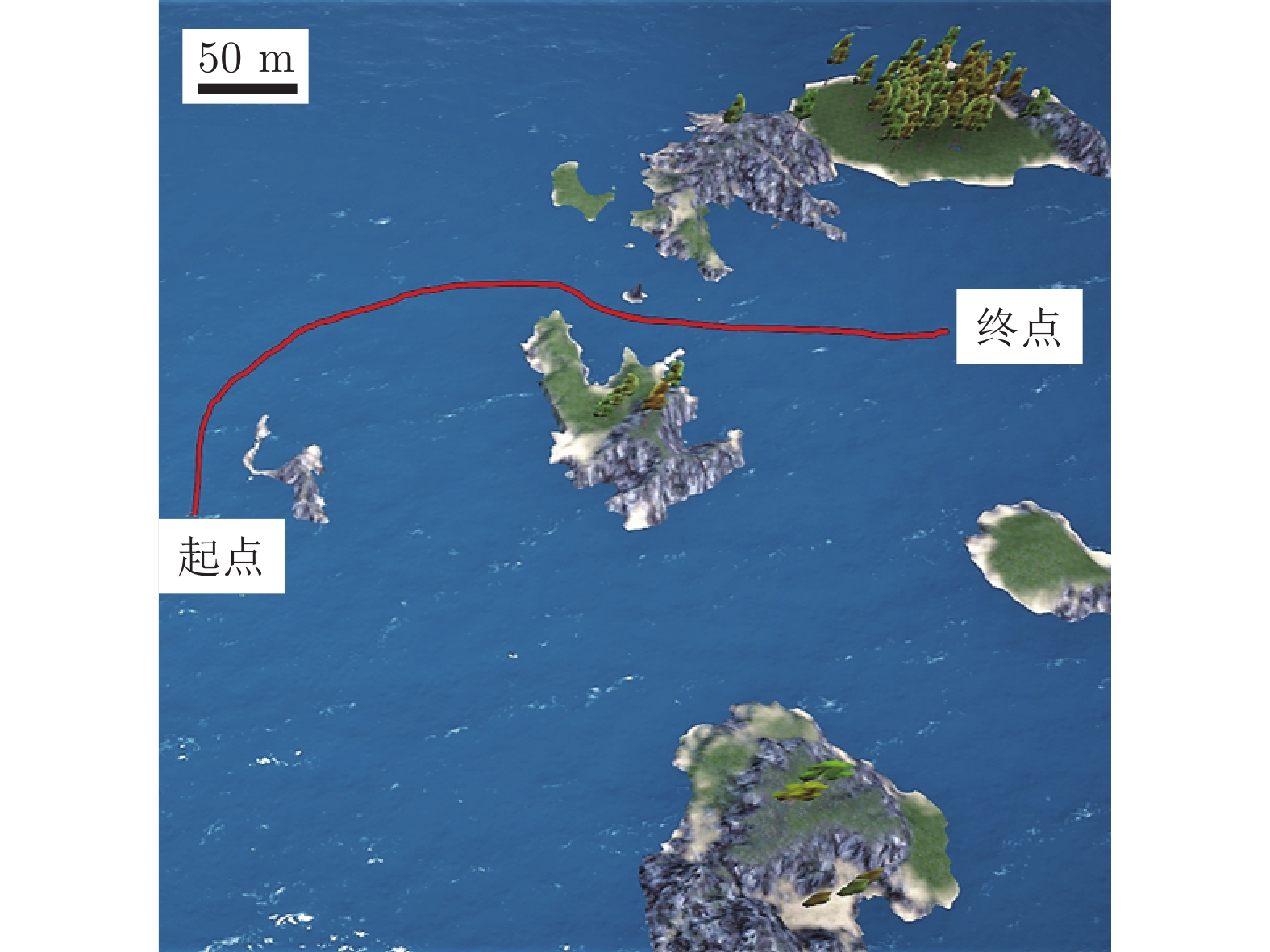
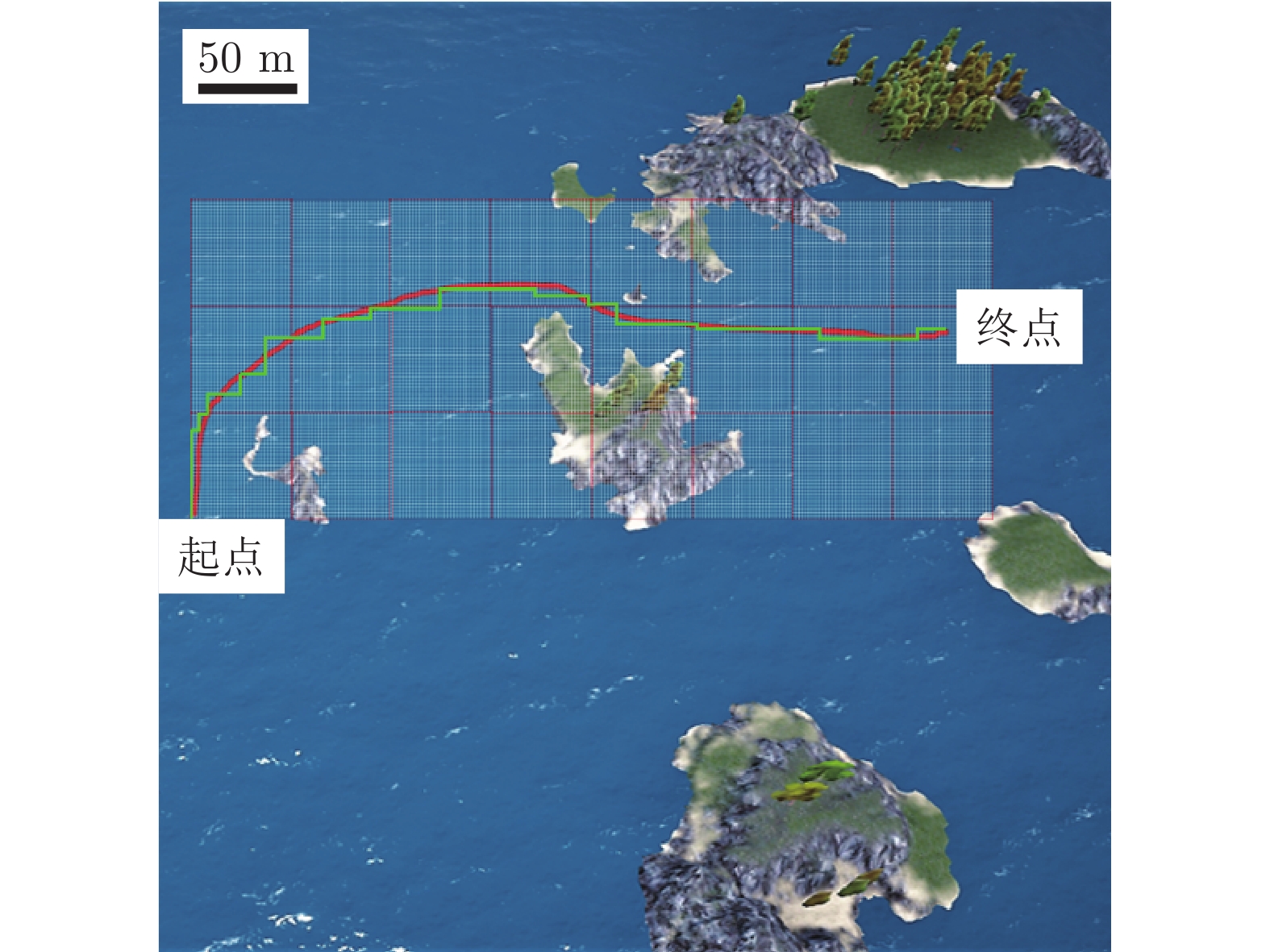
无人艇(Unmanned surface vehicle, USV)作为一种具有广泛应用前景的无人系统, 其自主决策能力尤为关键. 由于水面运动环境较为开阔, 传统避障决策算法难以在量化规则下自主规划最优路线, 而一般强化学习方法在大范围复杂环境下难以快速收敛. 针对这些问题, 提出一种基于阈值的深度Q网络避障算法(Threshold deep Q network, T-DQN), 在深度Q网络(Deep Q network, DQN)基础上增加长短期记忆网络(Long short-term memory, LSTM)来保存训练信息, 并设定经验回放池阈值加速算法的收敛. 通过在不同尺度的栅格环境中进行实验仿真, 实验结果表明, T-DQN算法能快速地收敛到最优路径, 其整体收敛步数相比Q-learning算法和DQN算法, 分别减少69.1%和24.8%, 引入的阈值筛选机制使整体收敛步数降低41.1%. 在Unity 3D强化学习仿真平台, 验证了复杂地图场景下的避障任务完成情况, 实验结果表明, 该算法能实现无人艇的精细化避障和智能安全行驶.
无人艇(Unmanned surface vehicle, USV)作为一种具有广泛应用前景的无人系统, 其自主决策能力尤为关键. 由于水面运动环境较为开阔, 传统避障决策算法难以在量化规则下自主规划最优路线, 而一般强化学习方法在大范围复杂环境下难以快速收敛. 针对这些问题, 提出一种基于阈值的深度Q网络避障算法(Threshold deep Q network, T-DQN), 在深度Q网络(Deep Q network, DQN)基础上增加长短期记忆网络(Long short-term memory, LSTM)来保存训练信息, 并设定经验回放池阈值加速算法的收敛. 通过在不同尺度的栅格环境中进行实验仿真, 实验结果表明, T-DQN算法能快速地收敛到最优路径, 其整体收敛步数相比Q-learning算法和DQN算法, 分别减少69.1%和24.8%, 引入的阈值筛选机制使整体收敛步数降低41.1%. 在Unity 3D强化学习仿真平台, 验证了复杂地图场景下的避障任务完成情况, 实验结果表明, 该算法能实现无人艇的精细化避障和智能安全行驶.



2023, 49(8): 1656-1666.
doi: 10.16383/j.aas.c220759
摘要:
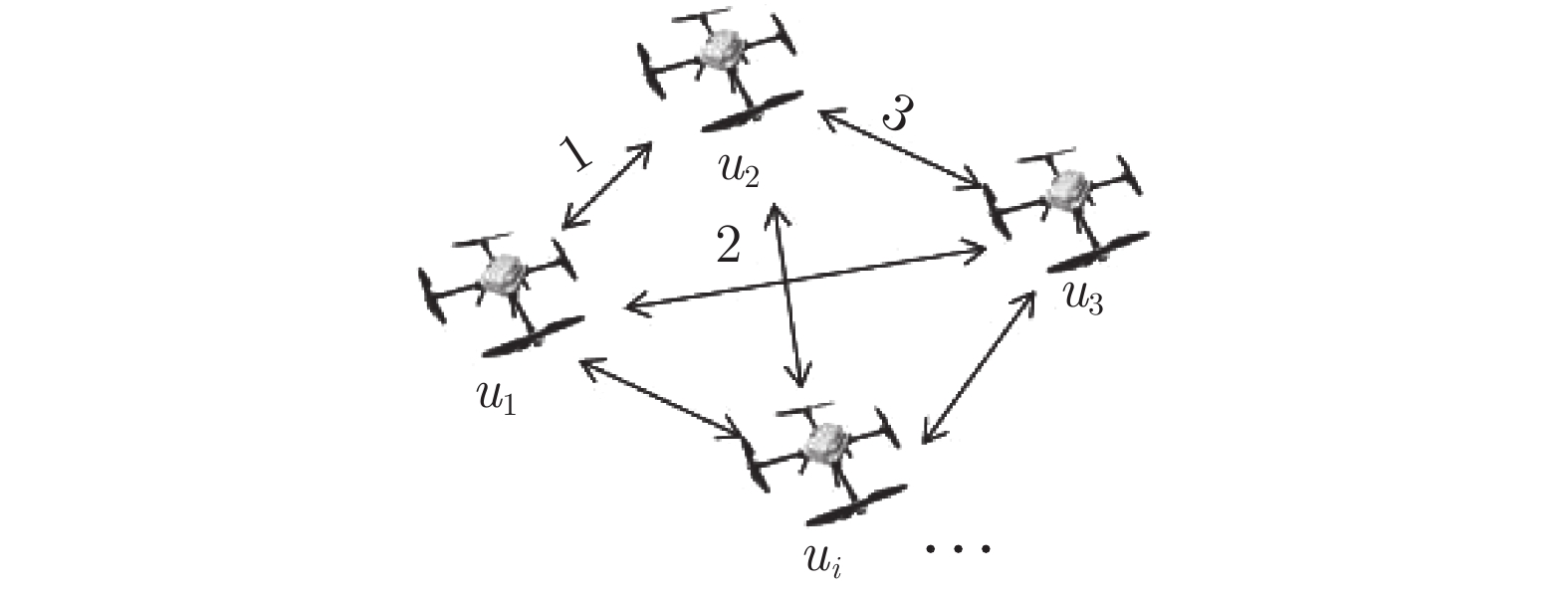
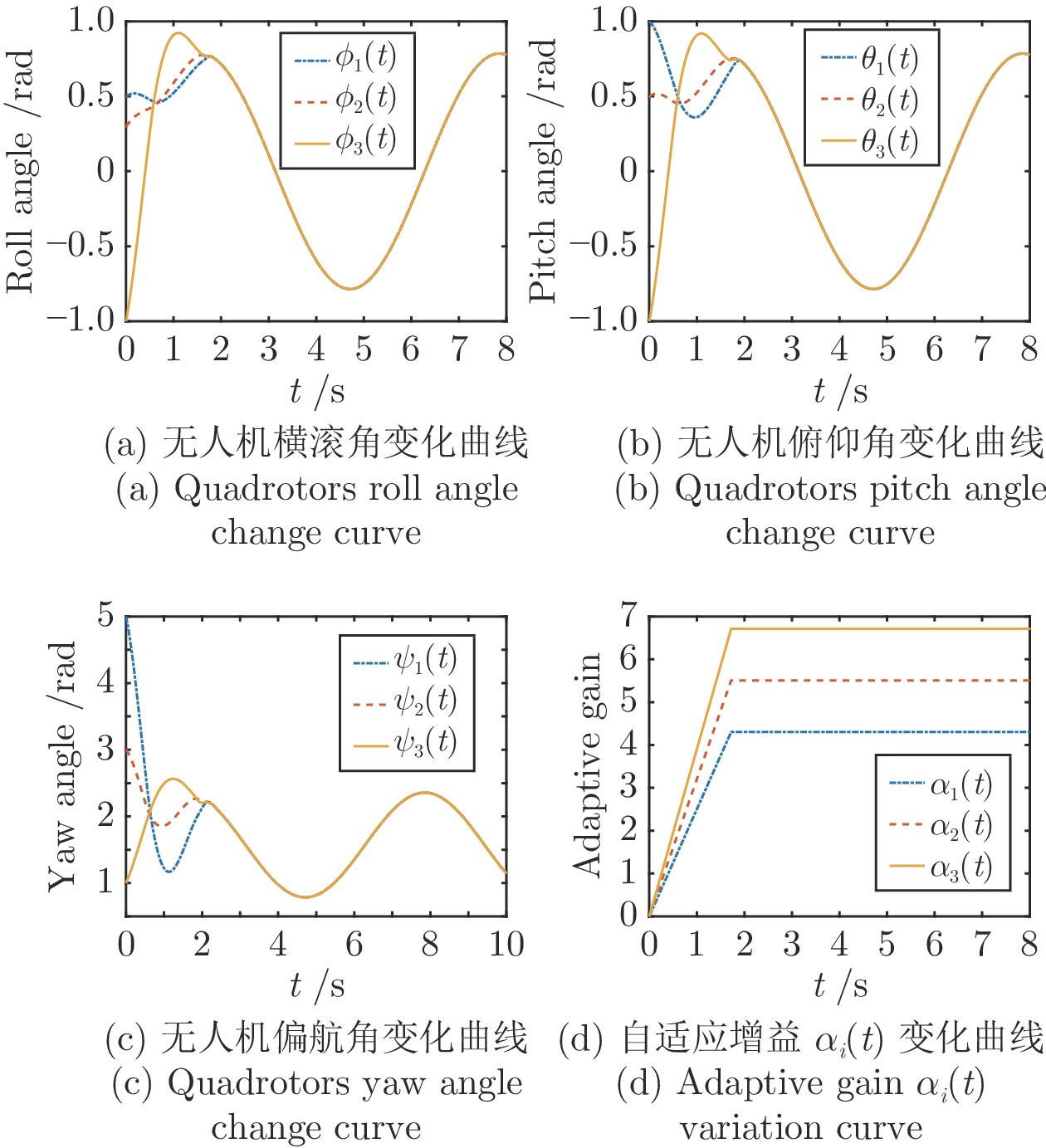
四旋翼无人机(Unmanned aerial vehicle, UAV)系统姿态角和角速度分别为运行在不同时间尺度上的慢、快动态. 由于输入扰动的上界难以精确估计, 本文提出一种基于自适应多尺度超螺旋(Super-twisting, STW)滑模算法的无人机集群一致性控制策略. 首先, 建立无人机集群系统的姿态角模型, 并通过奇异摄动理论将其化为两时间尺度形式. 基于系统的快慢特性, 本文设计两时间尺度的超螺旋滑模算法, 并采用自适应增益处理无人机集群系统的未知边界非线性. 此外, 还提出一种改进型自适应多尺度超螺旋滑模算法, 进一步减少系统的一致性收敛时间, 实现无人机集群姿态角有限时间内同步. 最后通过仿真分析, 验证两种自适应多尺度超螺旋算法的正确性和有效性.
四旋翼无人机(Unmanned aerial vehicle, UAV)系统姿态角和角速度分别为运行在不同时间尺度上的慢、快动态. 由于输入扰动的上界难以精确估计, 本文提出一种基于自适应多尺度超螺旋(Super-twisting, STW)滑模算法的无人机集群一致性控制策略. 首先, 建立无人机集群系统的姿态角模型, 并通过奇异摄动理论将其化为两时间尺度形式. 基于系统的快慢特性, 本文设计两时间尺度的超螺旋滑模算法, 并采用自适应增益处理无人机集群系统的未知边界非线性. 此外, 还提出一种改进型自适应多尺度超螺旋滑模算法, 进一步减少系统的一致性收敛时间, 实现无人机集群姿态角有限时间内同步. 最后通过仿真分析, 验证两种自适应多尺度超螺旋算法的正确性和有效性.

2023, 49(8): 1667-1678.
doi: 10.16383/j.aas.c220712
摘要:
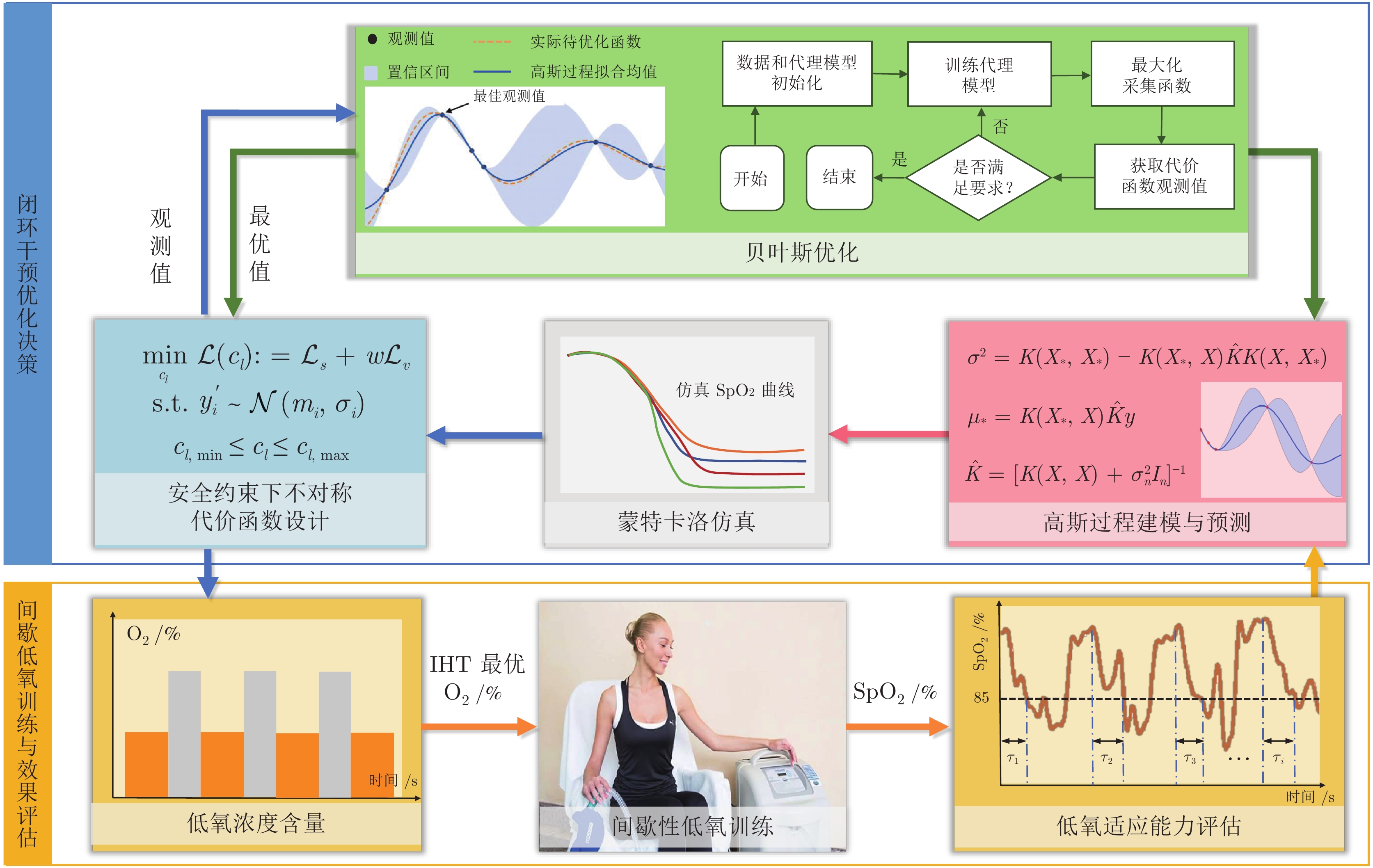
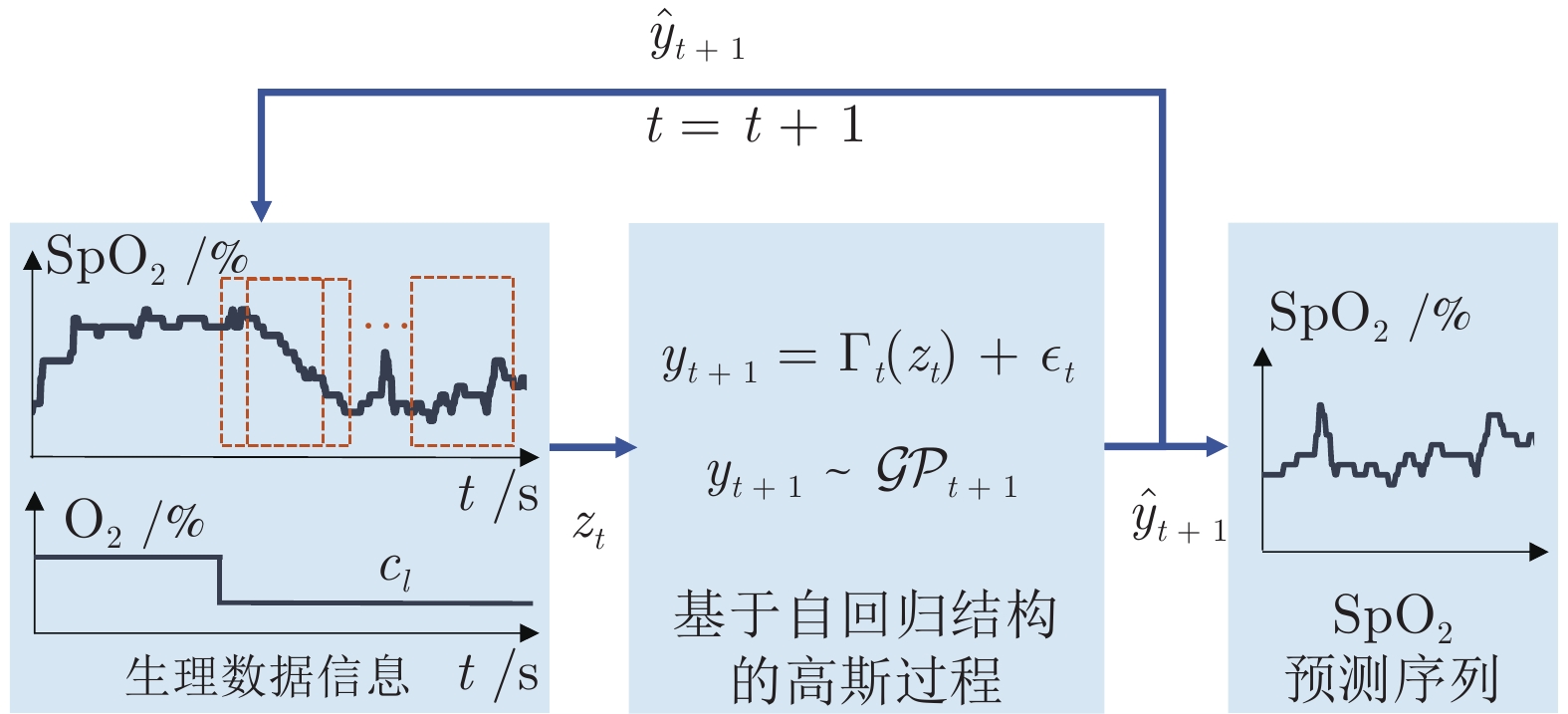
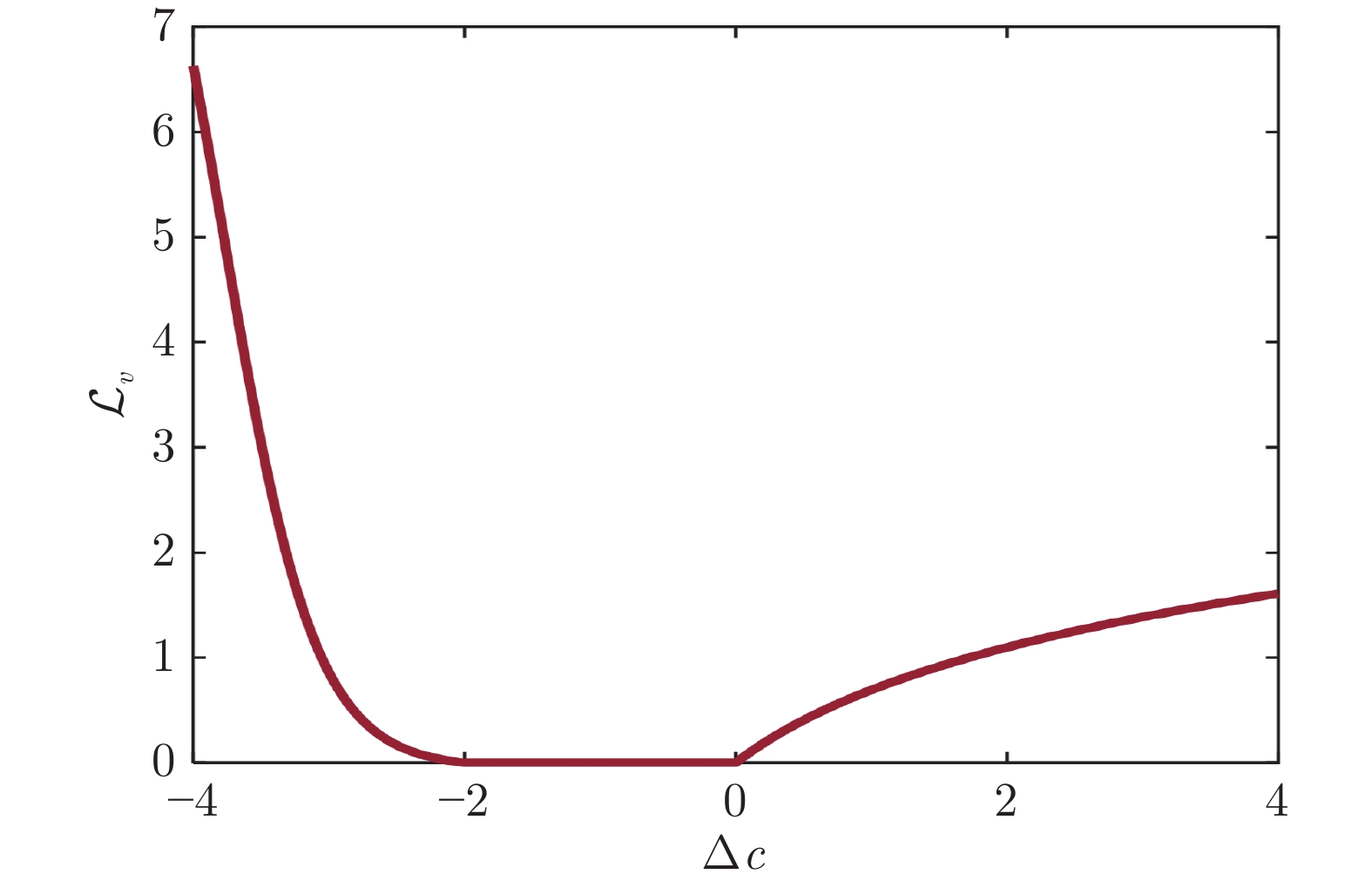
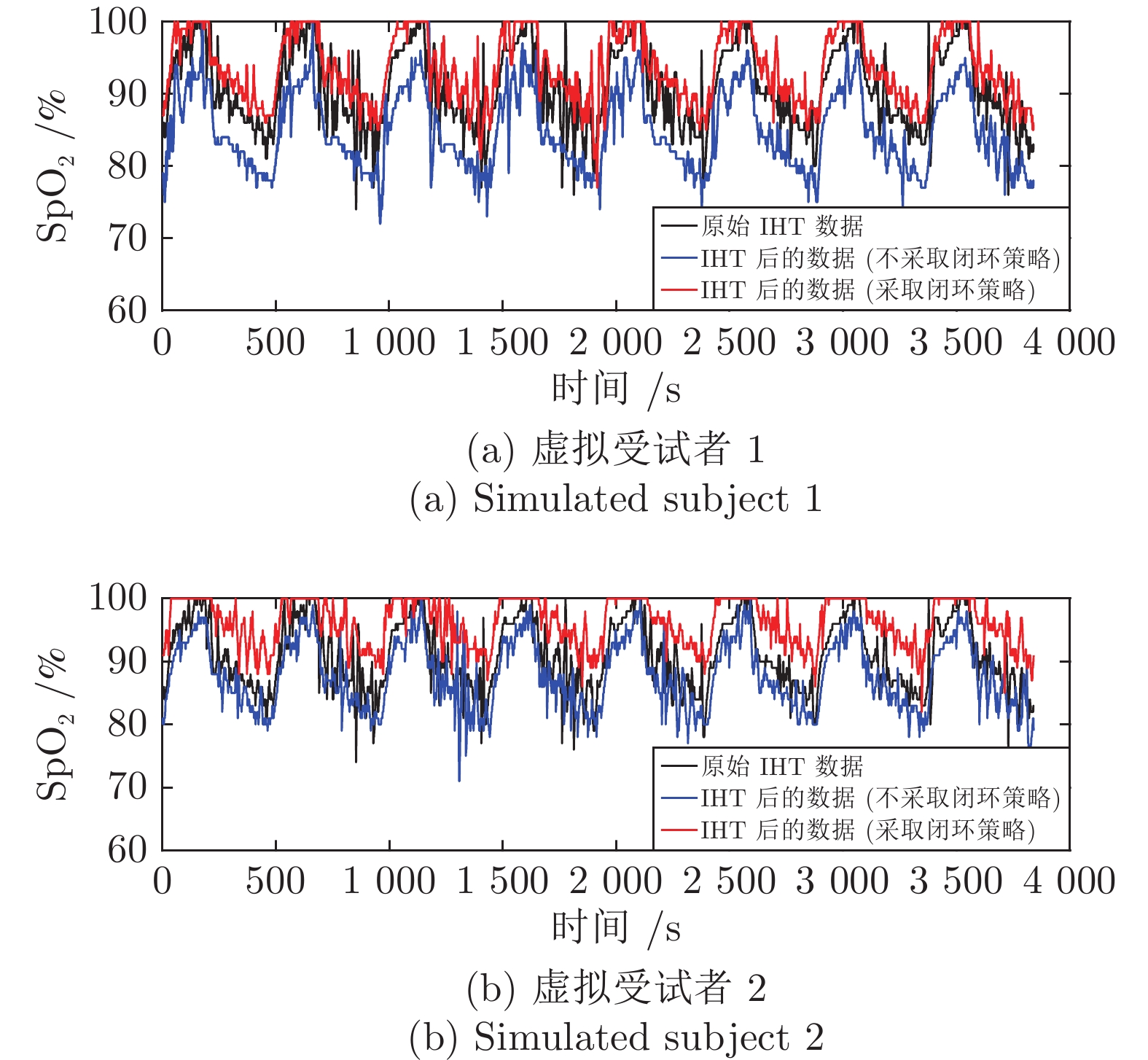
青藏地区快速的经济发展使得进入高原的群体数量日益增加, 随之而来的高原健康问题也愈发突出. 间歇性低氧训练(Intermittent hypoxic training, IHT)是急进高原前常使用的预习服方法, 一般针对不同个体均设置固定的开环策略, 存在方案制定无标准、系统化的理论指导缺乏、效果不明显等问题. 针对以上情况, 设计了一种小样本数据驱动的IHT策略贝叶斯闭环学习优化框架, 建立自回归结构的高斯过程血氧饱和度(Peripheral oxygen saturation, SpO2)预测模型, 并考虑高低风险事件对训练的影响, 设计与氧浓度变化方向和速率相关的风险不对称代价函数, 提出具有安全约束的贝叶斯优化方法, 实现IHT最优供氧浓度的优化决策. 考虑到现有仿真器无法反映个体动态变化过程, 依据“最优速率理论”设计了合理的模型自适应变化律. 所提出闭环干预方法通过该仿真器进行了可行性和有效性验证. 说明该学习框架能够指导个体提升高原适应能力, 减轻其在预习服阶段的非适应性不良反应, 为个性化IHT提供精准调控手段.
青藏地区快速的经济发展使得进入高原的群体数量日益增加, 随之而来的高原健康问题也愈发突出. 间歇性低氧训练(Intermittent hypoxic training, IHT)是急进高原前常使用的预习服方法, 一般针对不同个体均设置固定的开环策略, 存在方案制定无标准、系统化的理论指导缺乏、效果不明显等问题. 针对以上情况, 设计了一种小样本数据驱动的IHT策略贝叶斯闭环学习优化框架, 建立自回归结构的高斯过程血氧饱和度(Peripheral oxygen saturation, SpO2)预测模型, 并考虑高低风险事件对训练的影响, 设计与氧浓度变化方向和速率相关的风险不对称代价函数, 提出具有安全约束的贝叶斯优化方法, 实现IHT最优供氧浓度的优化决策. 考虑到现有仿真器无法反映个体动态变化过程, 依据“最优速率理论”设计了合理的模型自适应变化律. 所提出闭环干预方法通过该仿真器进行了可行性和有效性验证. 说明该学习框架能够指导个体提升高原适应能力, 减轻其在预习服阶段的非适应性不良反应, 为个性化IHT提供精准调控手段.

2023, 49(8): 1679-1687.
doi: 10.16383/j.aas.c190367
摘要:
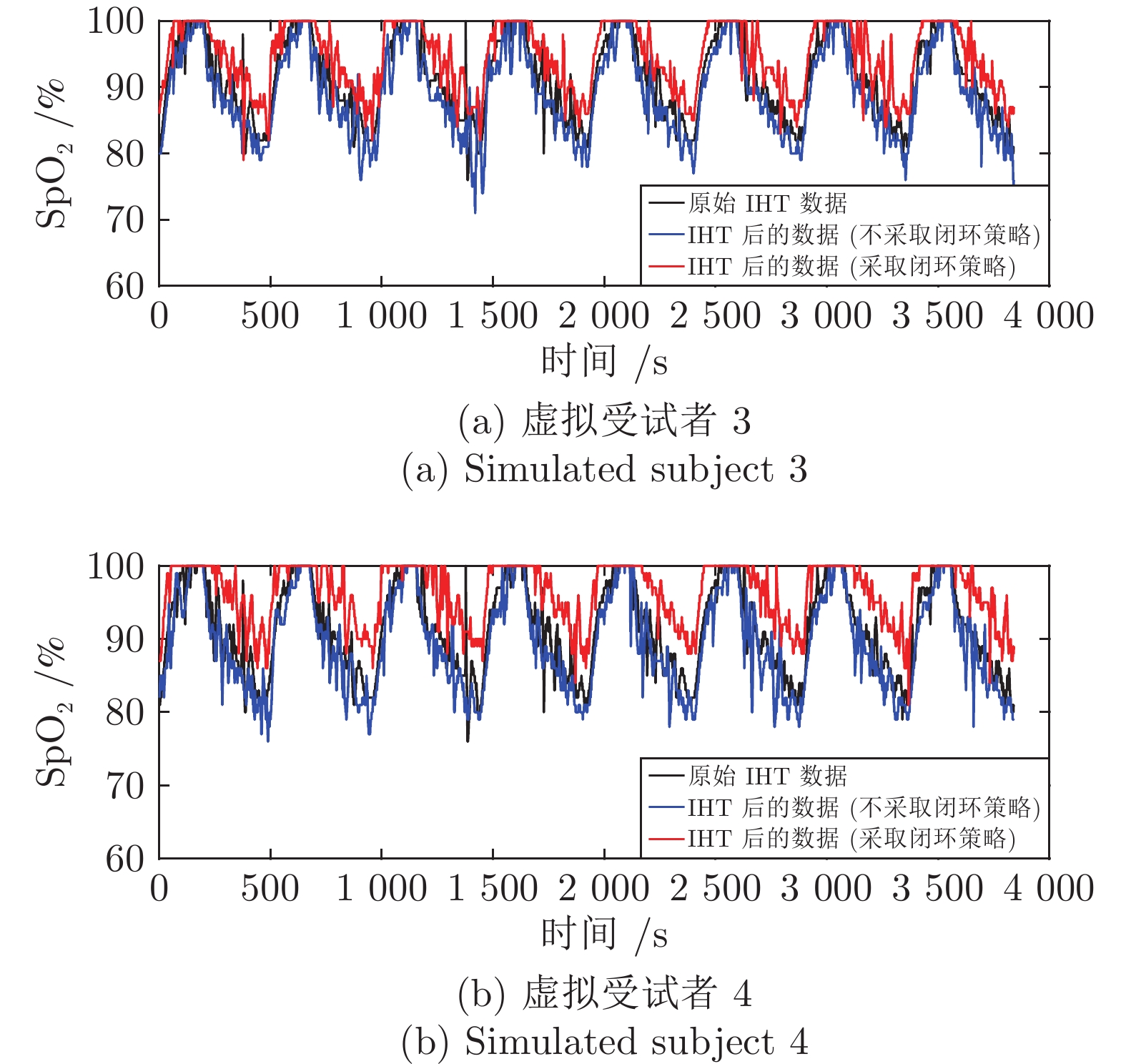
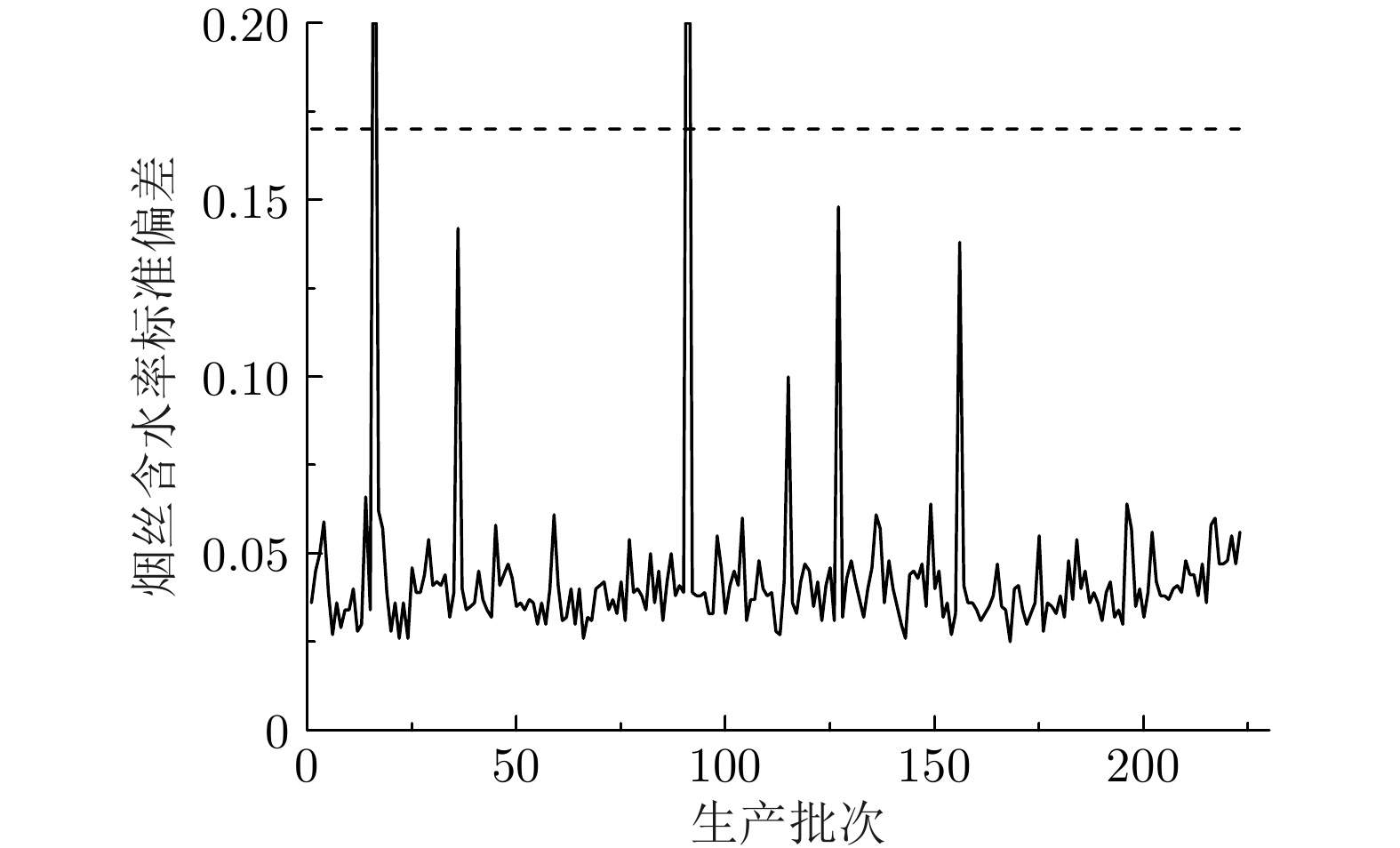
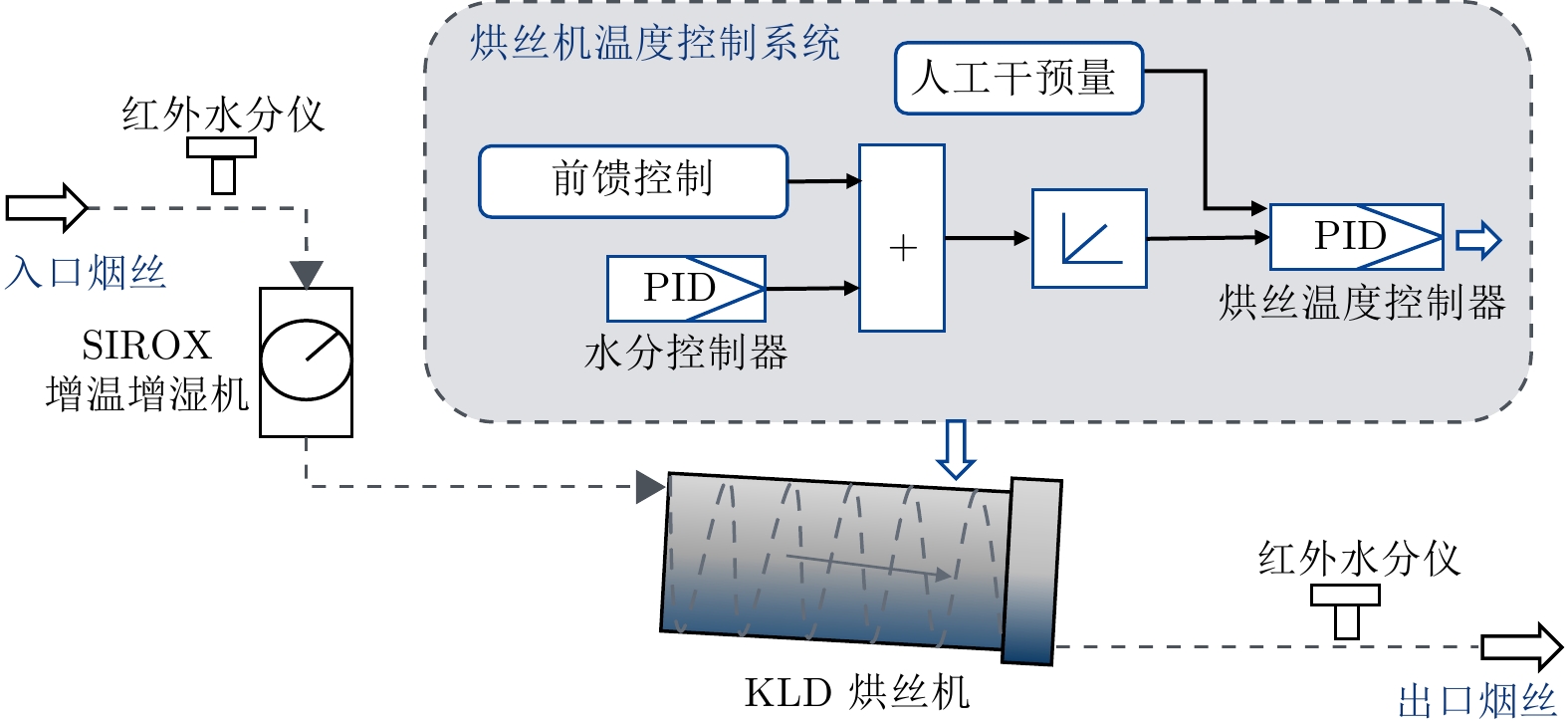
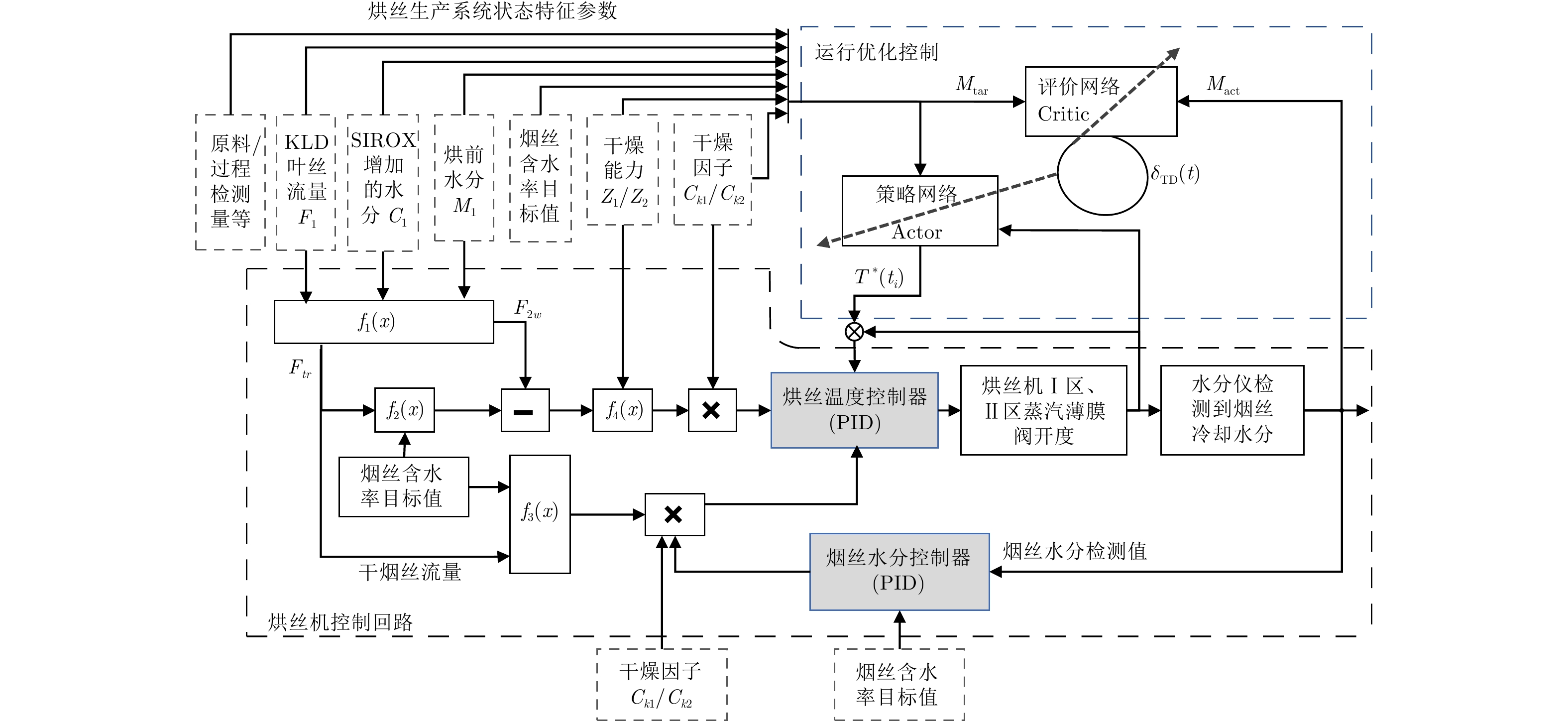
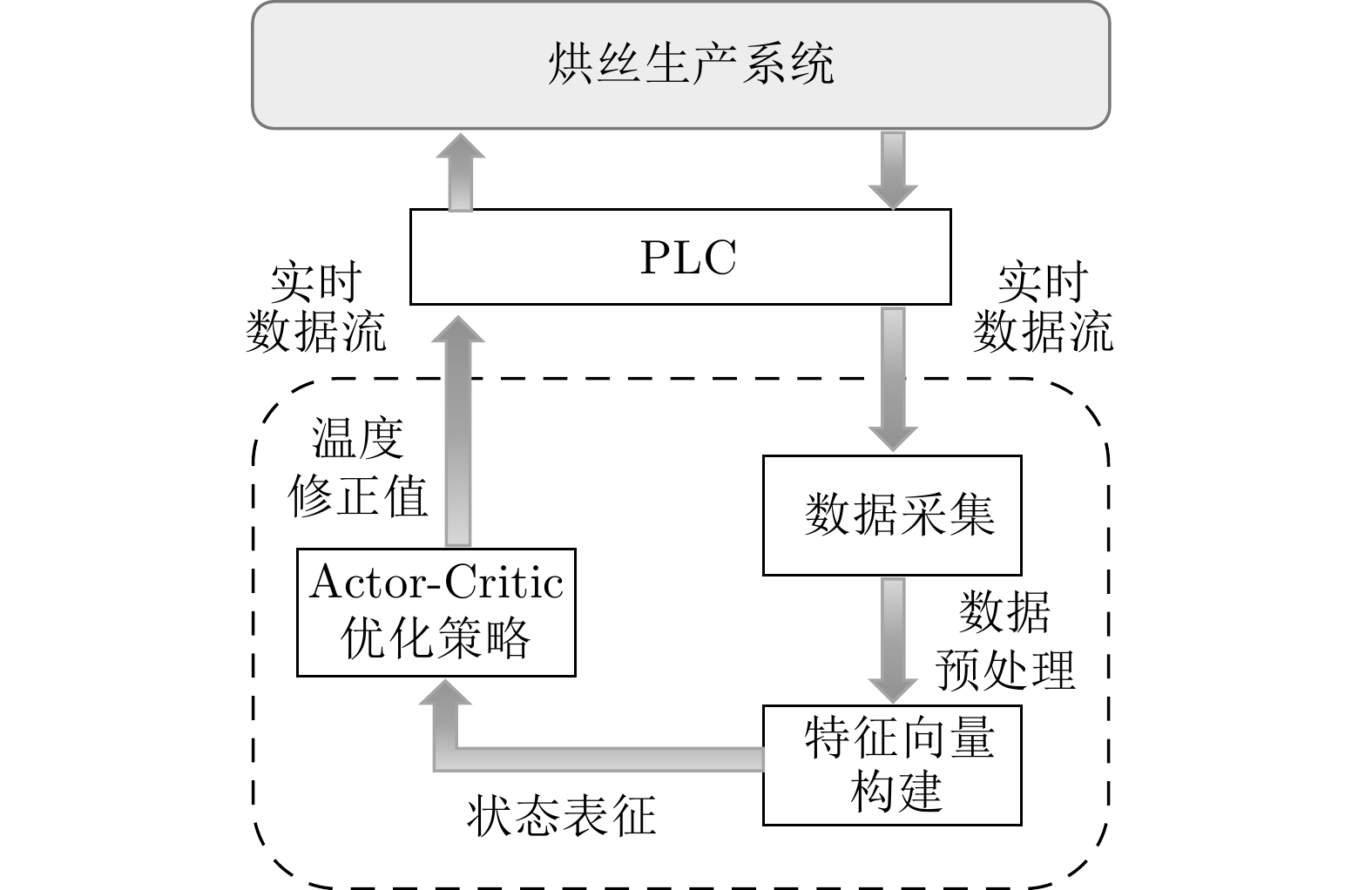
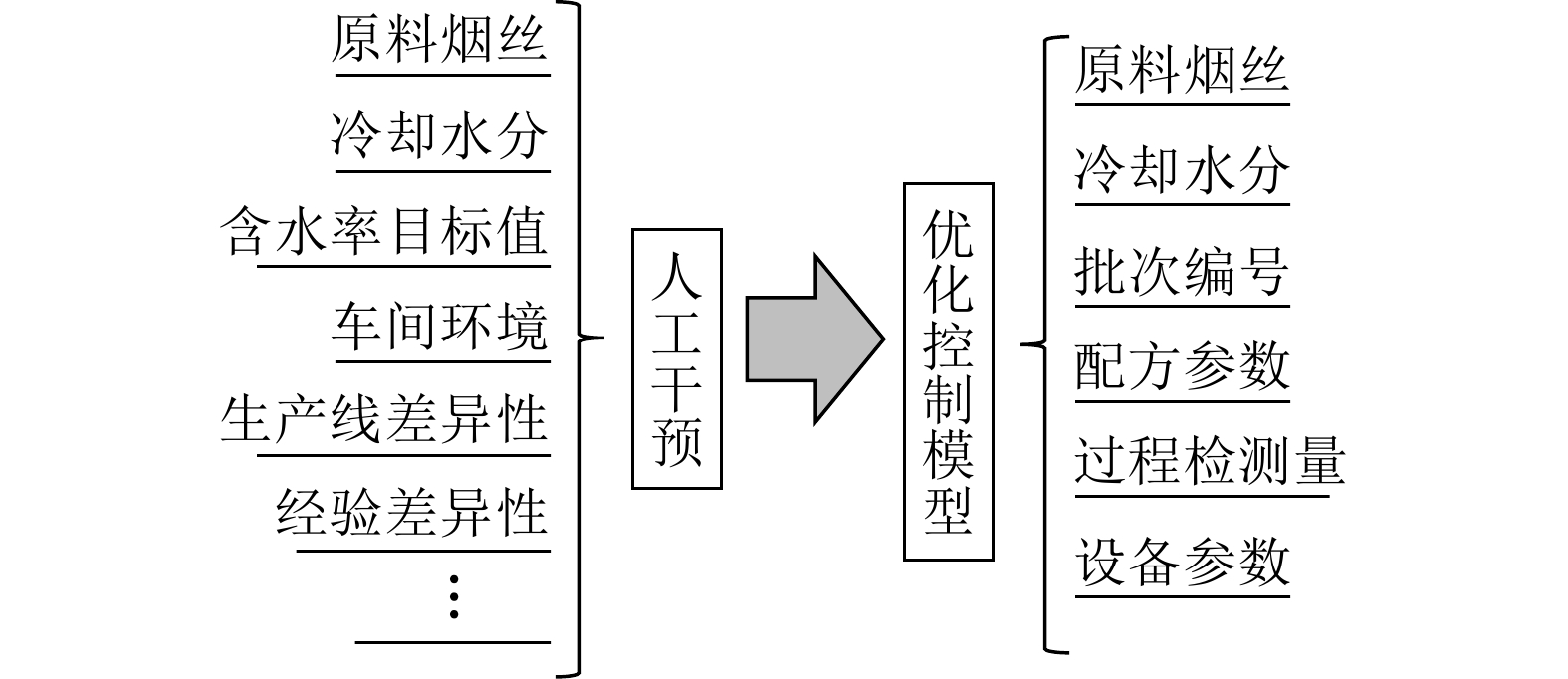
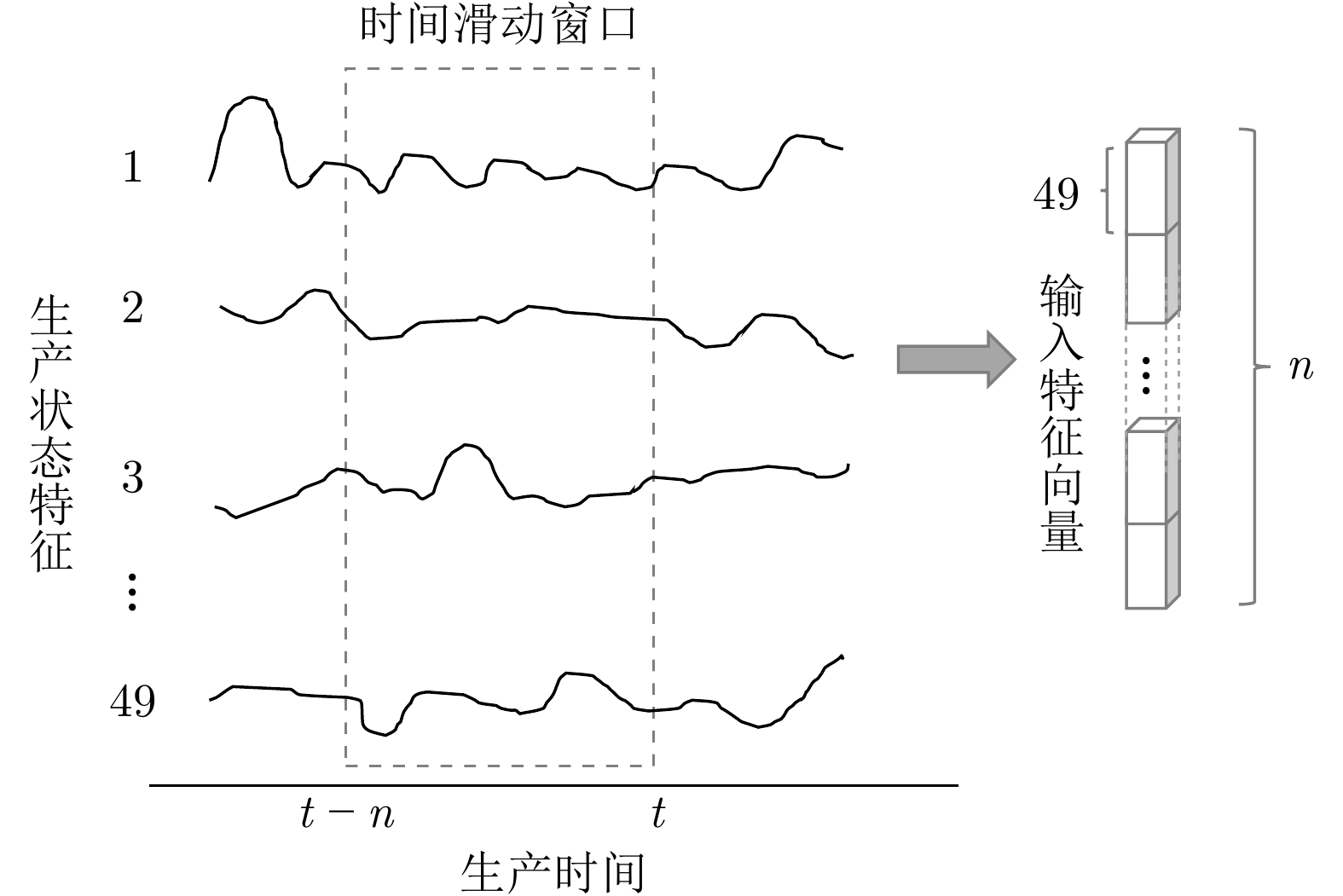
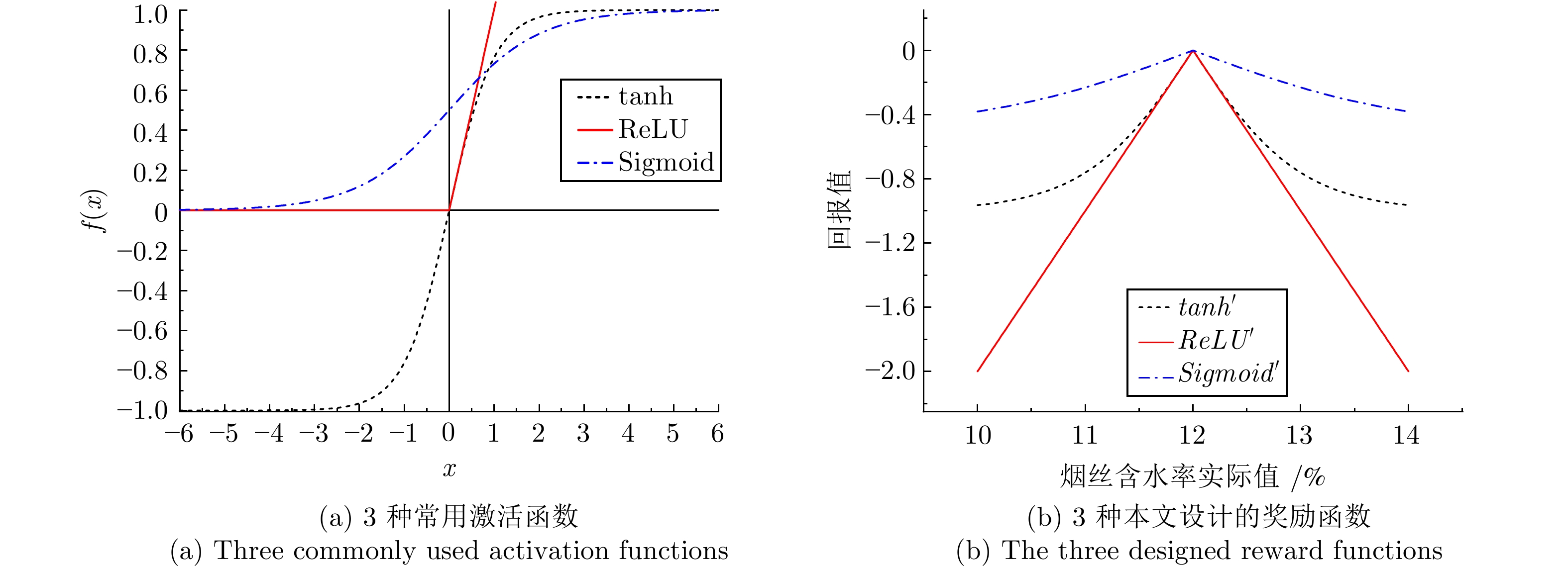
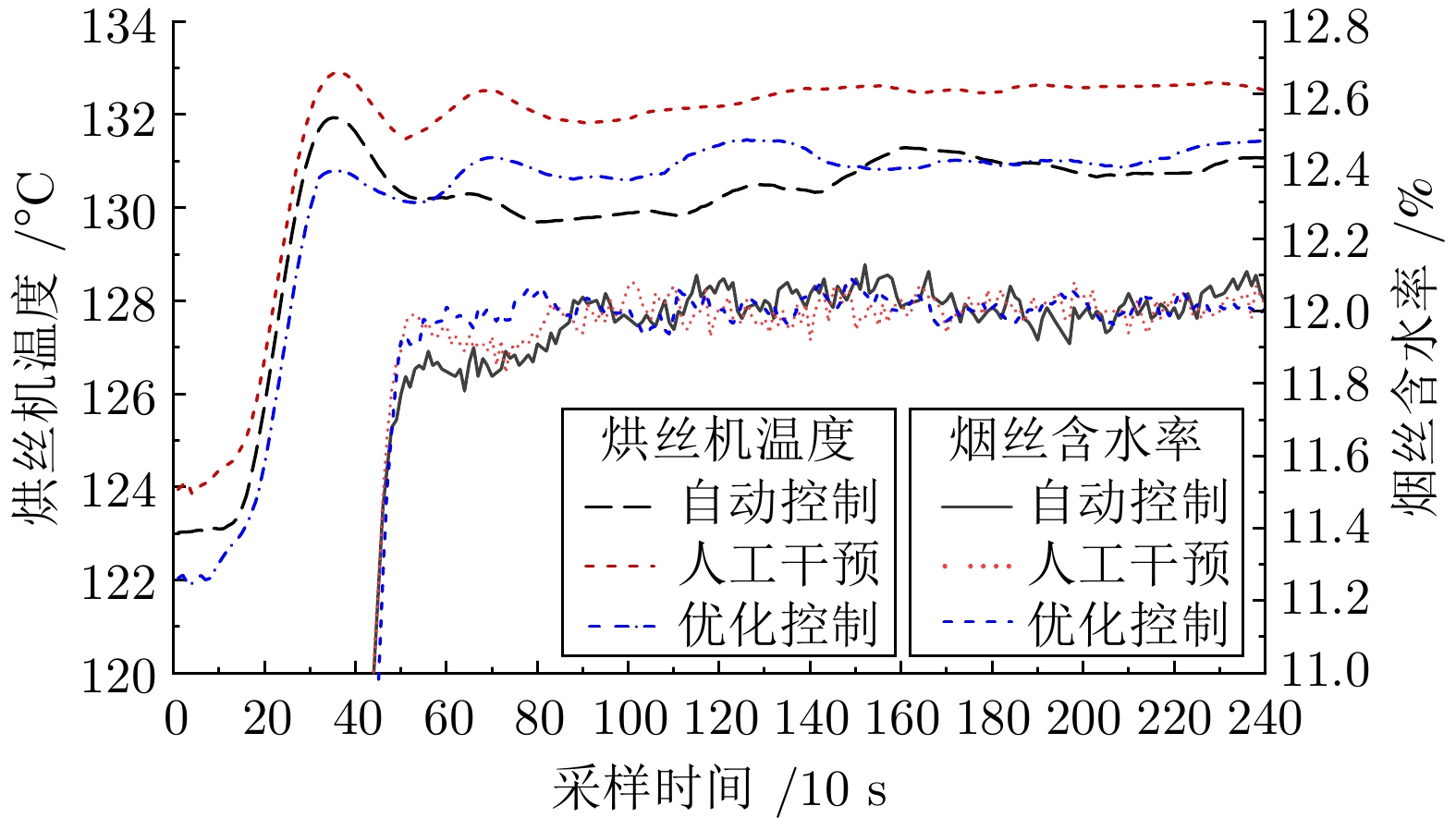
针对烘丝开始阶段存在的烘丝温度超调、过干烟丝较多等问题, 提出一种基于强化学习 (Reinforcement learning, RL)的减少烟丝“干头” 量的方法. 该方法利用生产实时数据作为输入特征向量感知烘丝生产过程的状态变化, 以烟丝含水率检测值为依据来评价、优化烘丝温度控制策略, 实现对烘丝机温度设定值的在线修正, 优化烘丝开始阶段的温度控制, 有效改善烟丝过干问题. 与烘丝机的自动控制模式和人工干预模式相比, 烟丝含水率的标准偏差比自动控制时降低了44.7%, 比人工干预时降低了14.3%. 实验结果表明烟丝含水率的稳定性有较大提高, 烟丝“干头” 量明显减少, 验证了所提方法的有效性和可行性.
针对烘丝开始阶段存在的烘丝温度超调、过干烟丝较多等问题, 提出一种基于强化学习 (Reinforcement learning, RL)的减少烟丝“干头” 量的方法. 该方法利用生产实时数据作为输入特征向量感知烘丝生产过程的状态变化, 以烟丝含水率检测值为依据来评价、优化烘丝温度控制策略, 实现对烘丝机温度设定值的在线修正, 优化烘丝开始阶段的温度控制, 有效改善烟丝过干问题. 与烘丝机的自动控制模式和人工干预模式相比, 烟丝含水率的标准偏差比自动控制时降低了44.7%, 比人工干预时降低了14.3%. 实验结果表明烟丝含水率的稳定性有较大提高, 烟丝“干头” 量明显减少, 验证了所提方法的有效性和可行性.

2023, 49(8): 1688-1706.
doi: 10.16383/j.aas.c210121
摘要:
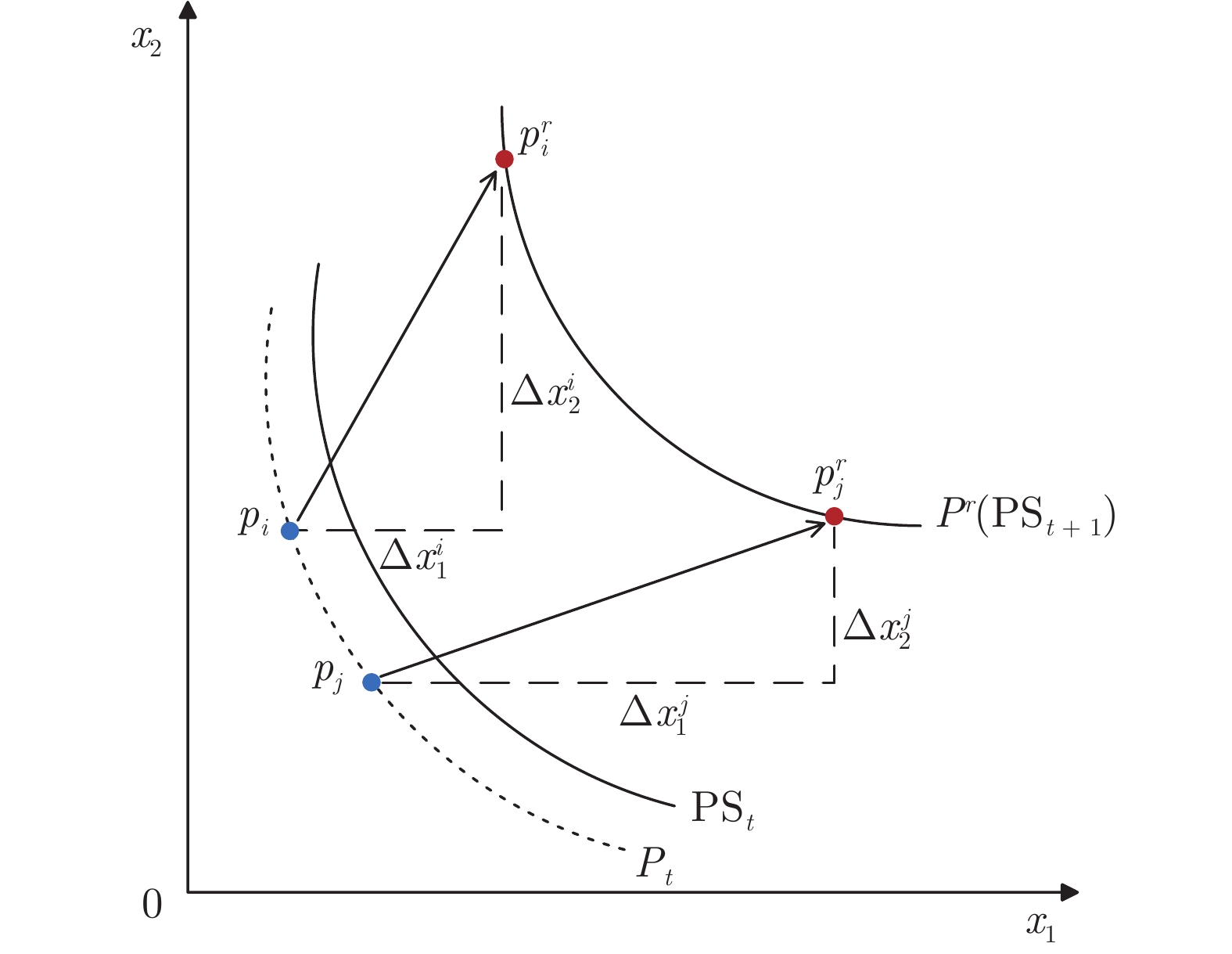
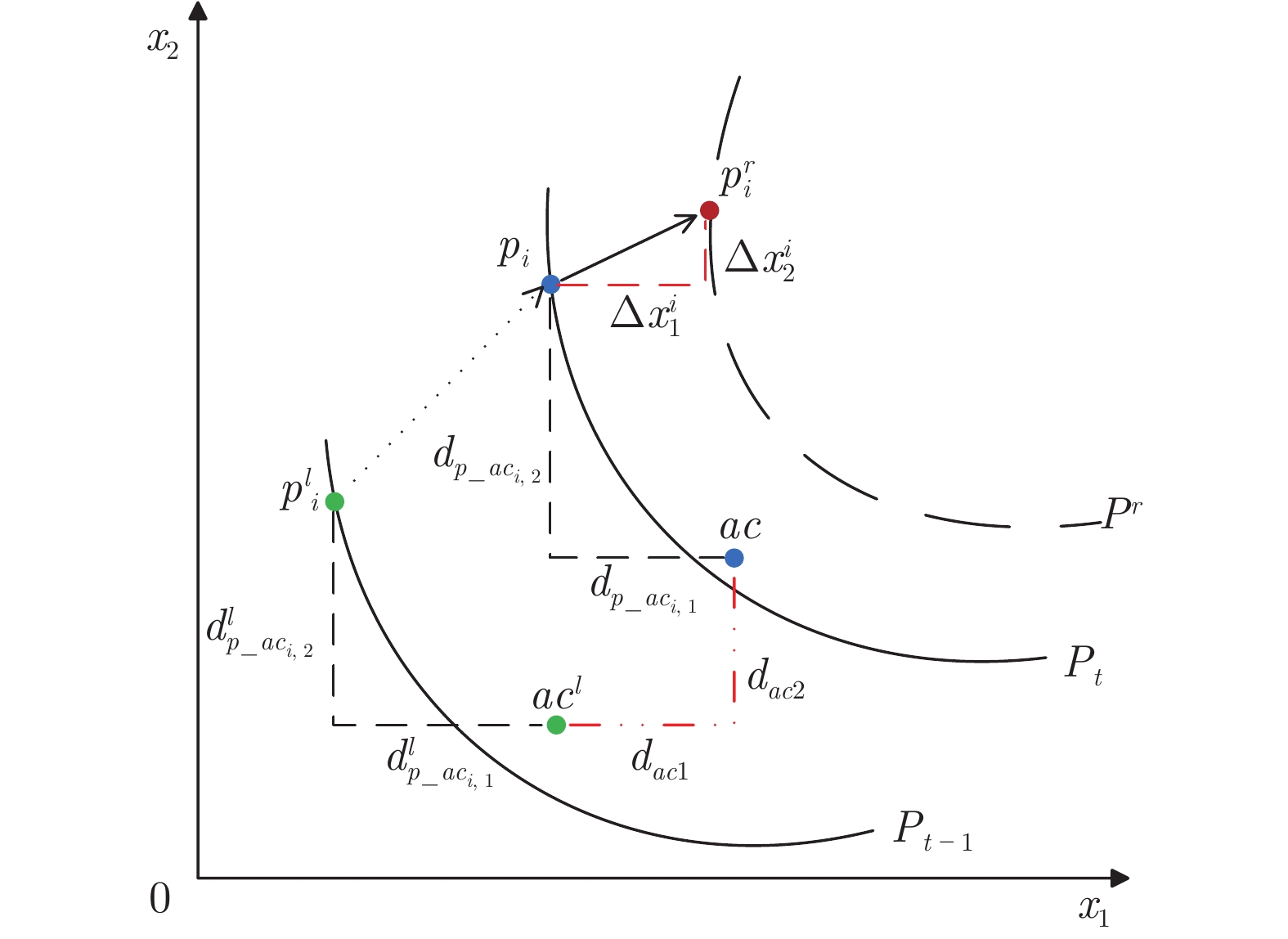
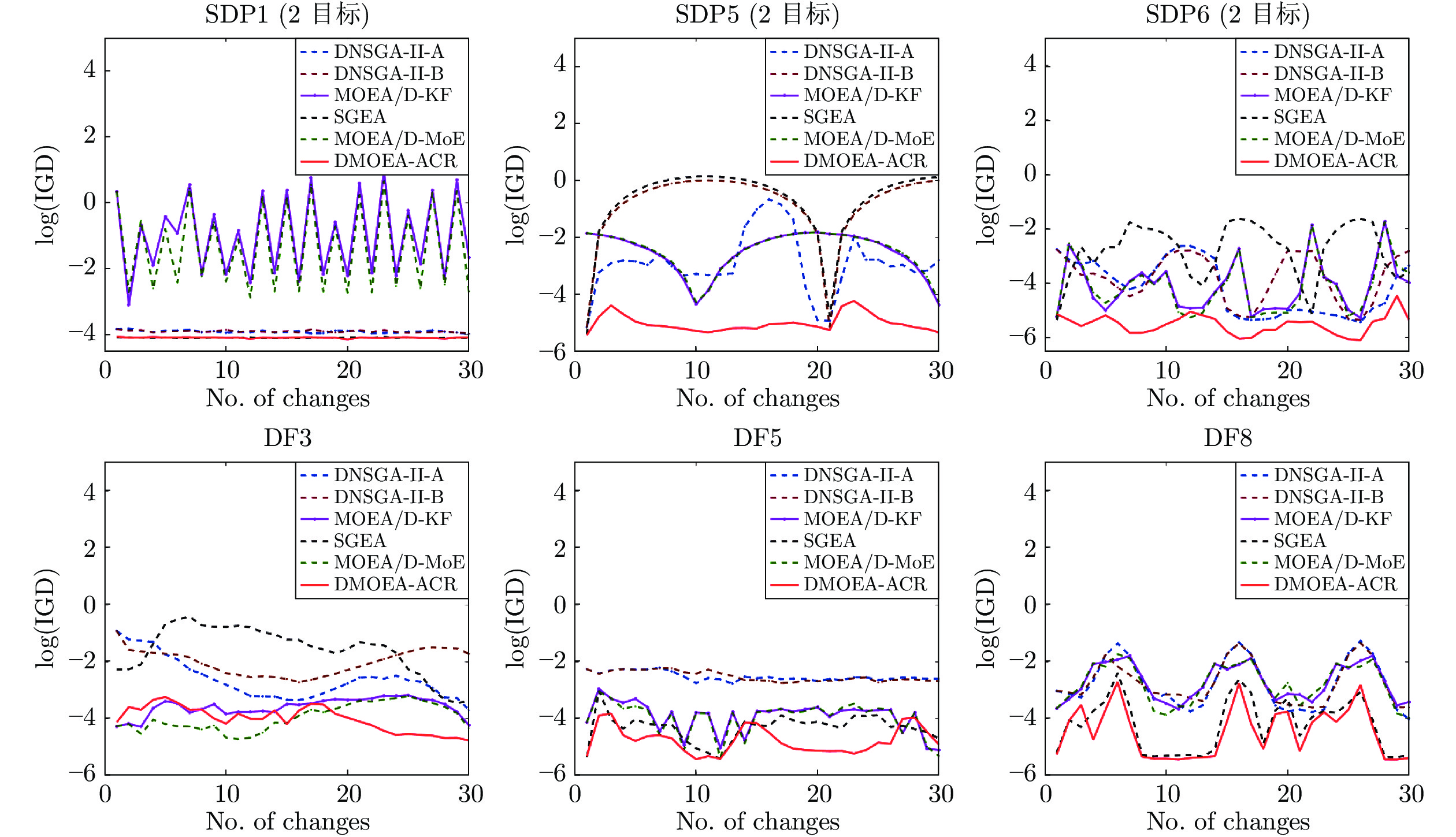
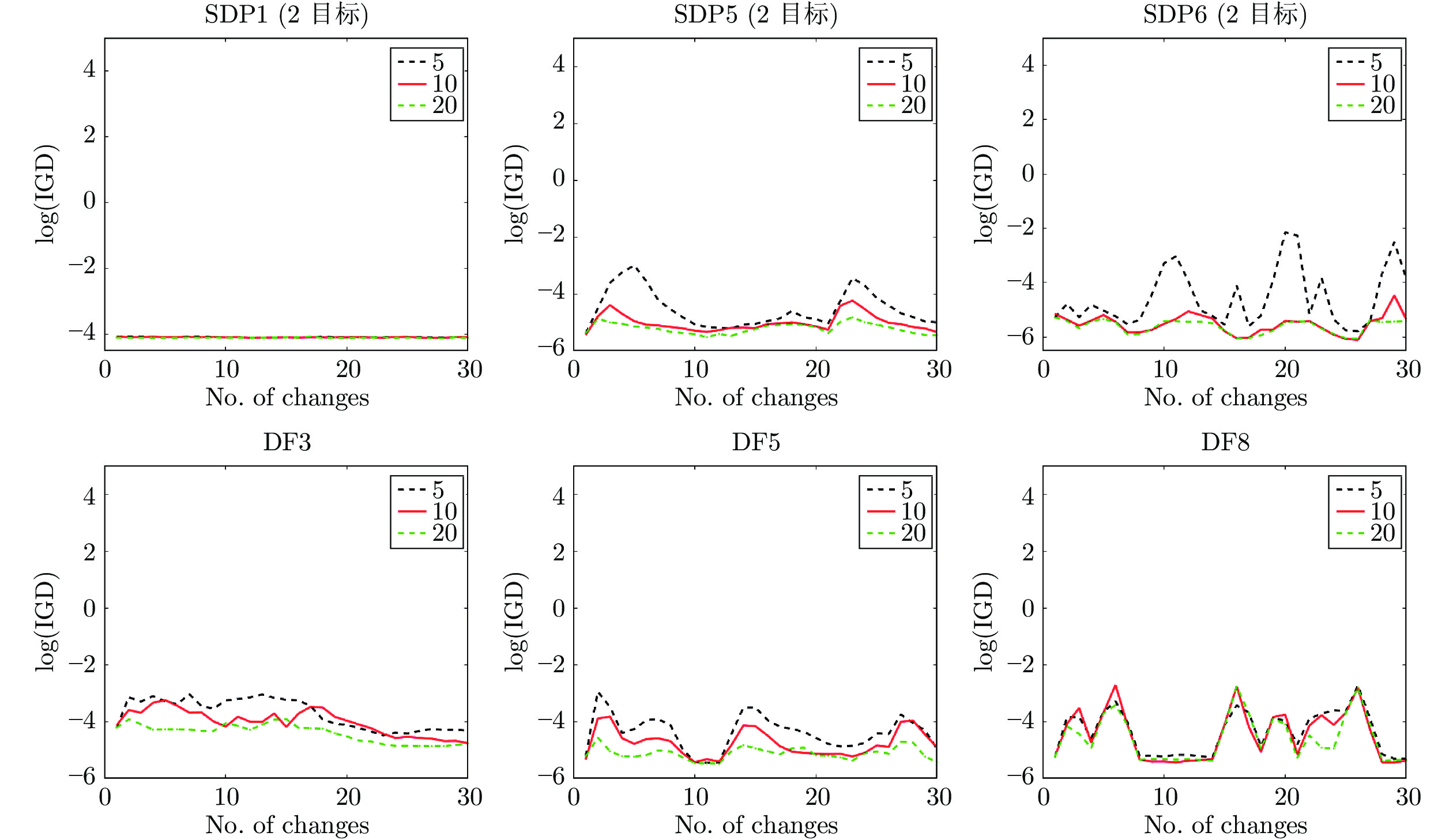
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs)的目标函数发生变化时, 需要采取变化响应策略对种群进行重新初始化, 以快速追踪新环境中的最优解集. 现有动态多目标优化算法对不同个体、不同维度的决策变量缺乏针对性的变化响应, 导致重新初始化效果尚存在较大改进空间. 为此, 提出一种对不同个体、不同维度的决策变量分别进行自适应变化响应的动态多目标进化算法(Dynamic multi-objective evolutionary algorithm with adaptive change response, DMOEA-ACR). 该算法包括两个核心部分: 1)对\begin{document}$t $\end{document} \begin{document}$t-1 $\end{document}
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs)的目标函数发生变化时, 需要采取变化响应策略对种群进行重新初始化, 以快速追踪新环境中的最优解集. 现有动态多目标优化算法对不同个体、不同维度的决策变量缺乏针对性的变化响应, 导致重新初始化效果尚存在较大改进空间. 为此, 提出一种对不同个体、不同维度的决策变量分别进行自适应变化响应的动态多目标进化算法(Dynamic multi-objective evolutionary algorithm with adaptive change response, DMOEA-ACR). 该算法包括两个核心部分: 1)对



2023, 49(8): 1707-1722.
doi: 10.16383/j.aas.c220549
摘要:
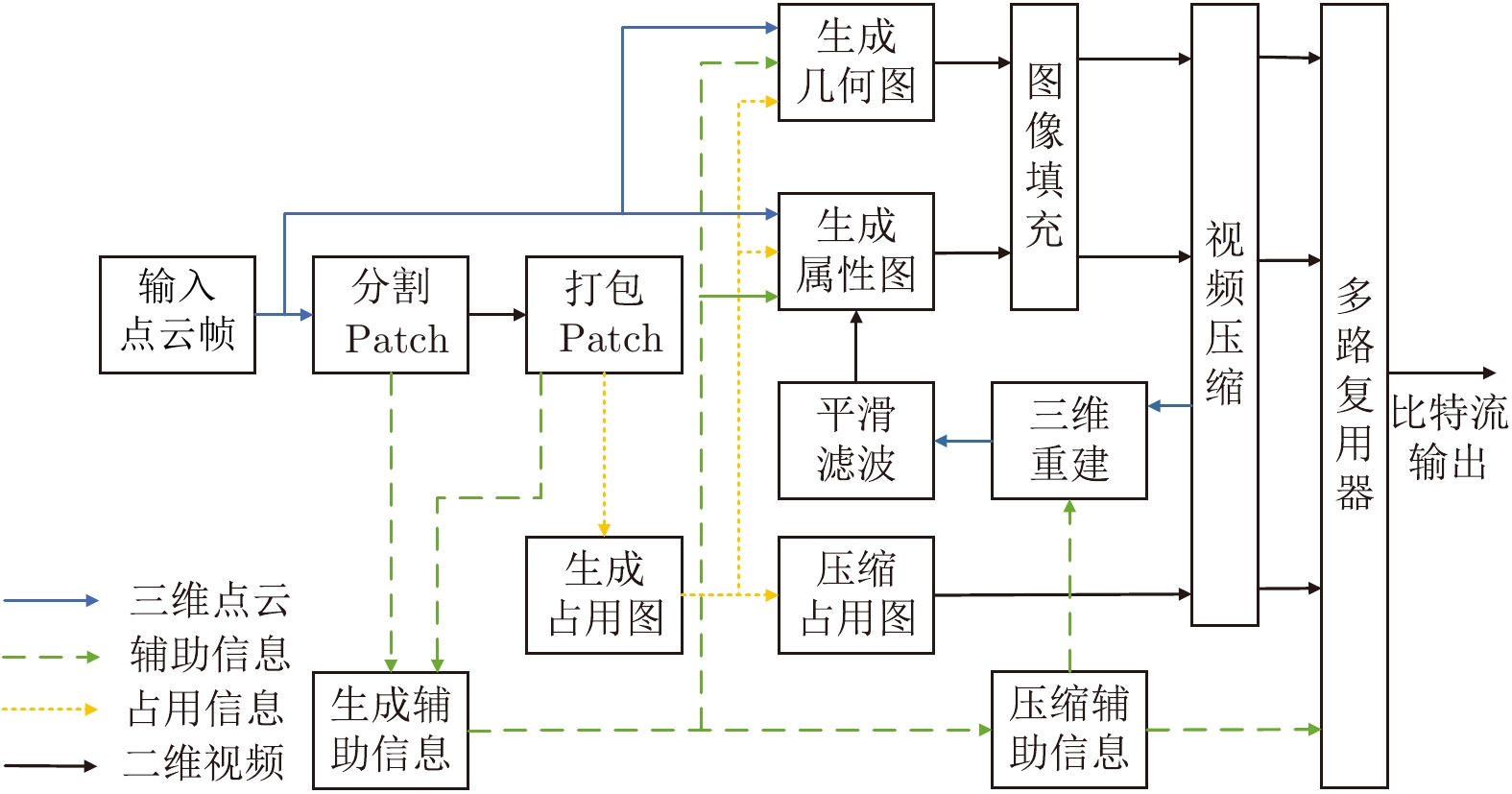
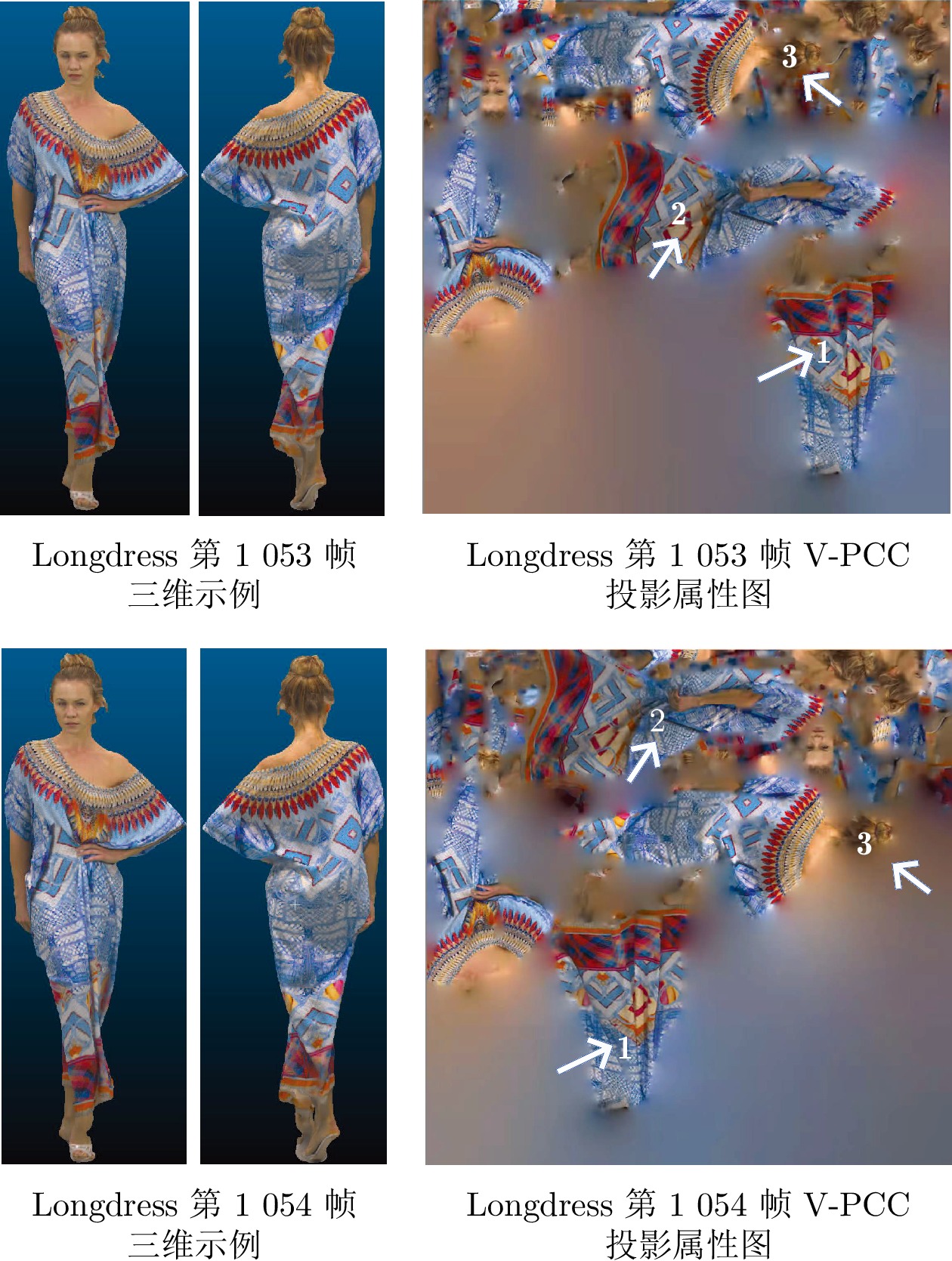
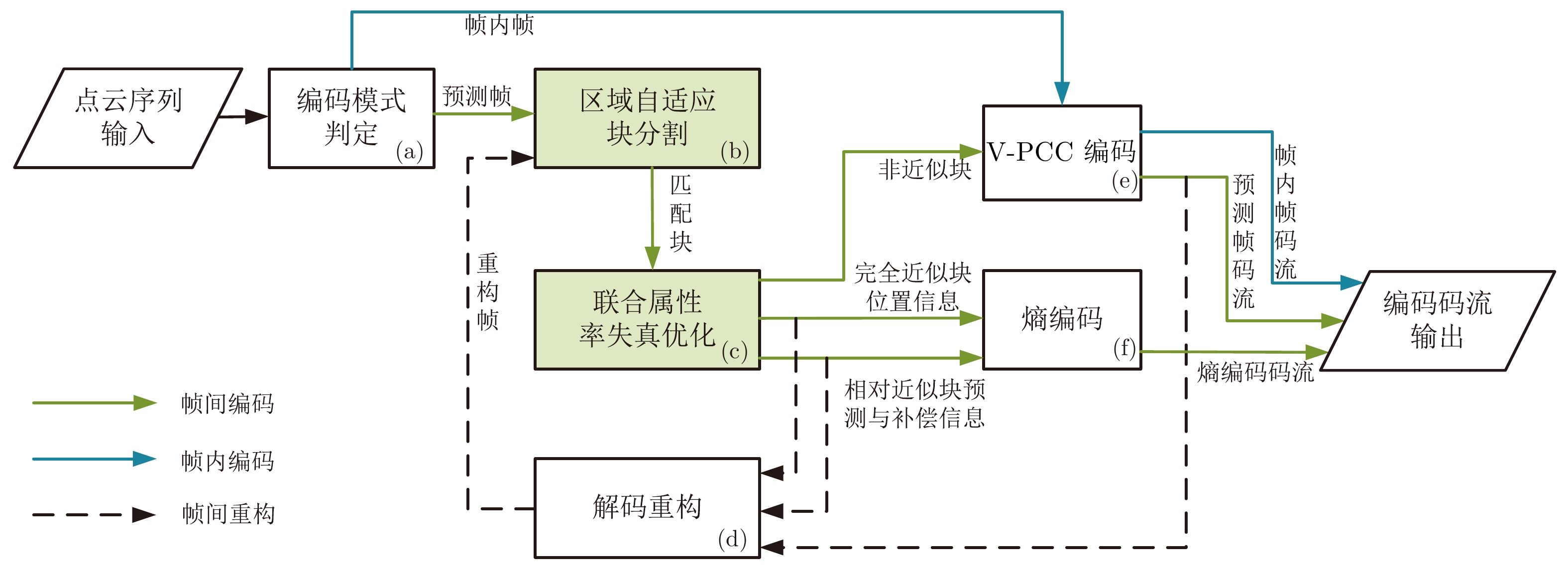
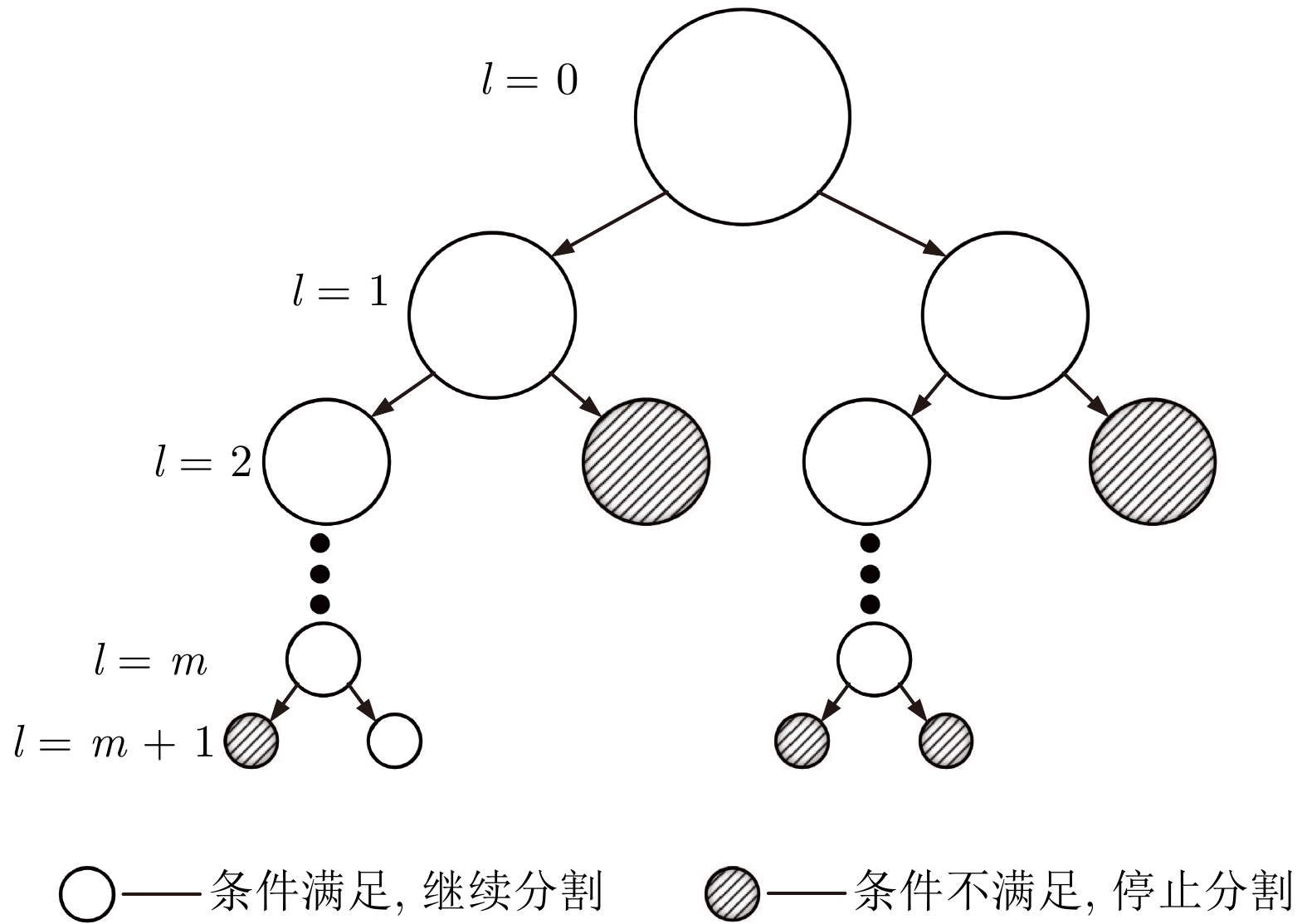
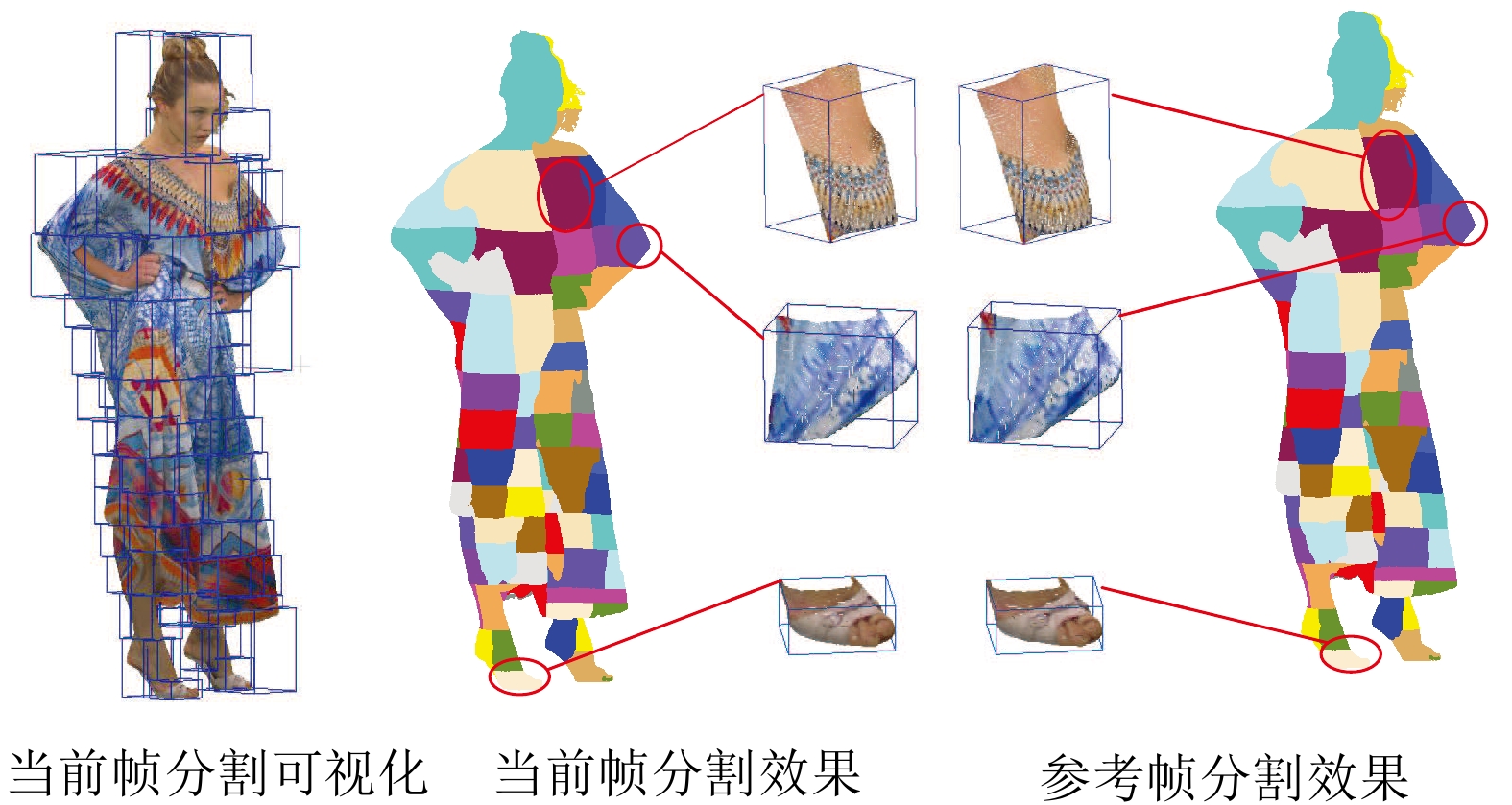
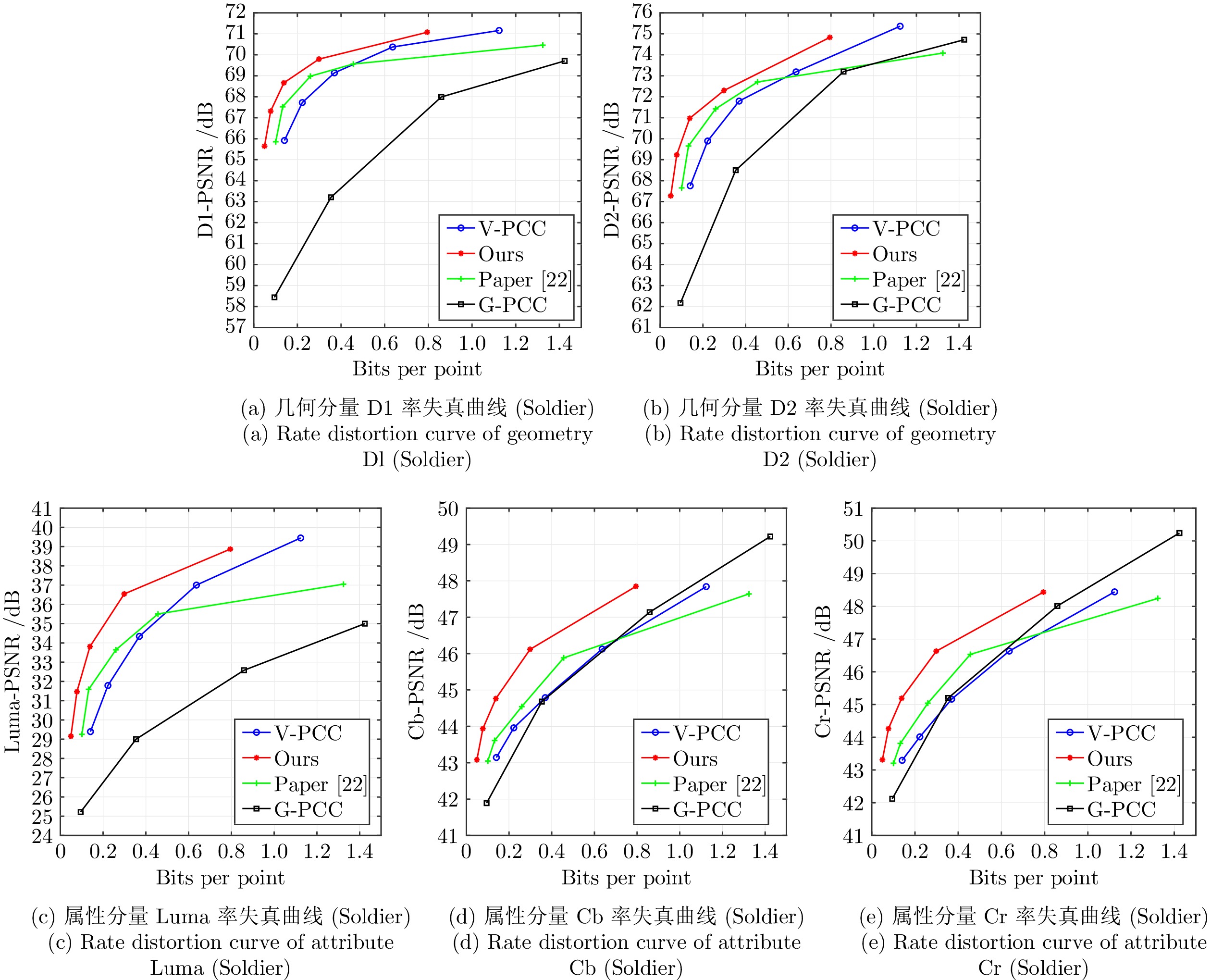
基于视频的点云压缩(Video based point cloud compression, V-PCC)为压缩动态点云提供了高效的解决方案, 但V-PCC从三维到二维的投影使得三维帧间运动的相关性被破坏, 降低了帧间编码性能. 针对这一问题, 提出一种基于V-PCC改进的自适应分割的视频点云多模式帧间编码方法, 并依此设计了一种新型动态点云帧间编码框架. 首先, 为实现更精准的块预测, 提出区域自适应分割的块匹配方法以寻找最佳匹配块; 其次, 为进一步提高帧间编码性能, 提出基于联合属性率失真优化(Rate distortion optimization, RDO)的多模式帧间编码方法, 以更好地提高预测精度和降低码率消耗. 实验结果表明, 提出的改进算法相较于V-PCC实现了−22.57%的BD-BR (Bjontegaard delta bit rate)增益. 该算法特别适用于视频监控和视频会议等帧间变化不大的动态点云场景.
基于视频的点云压缩(Video based point cloud compression, V-PCC)为压缩动态点云提供了高效的解决方案, 但V-PCC从三维到二维的投影使得三维帧间运动的相关性被破坏, 降低了帧间编码性能. 针对这一问题, 提出一种基于V-PCC改进的自适应分割的视频点云多模式帧间编码方法, 并依此设计了一种新型动态点云帧间编码框架. 首先, 为实现更精准的块预测, 提出区域自适应分割的块匹配方法以寻找最佳匹配块; 其次, 为进一步提高帧间编码性能, 提出基于联合属性率失真优化(Rate distortion optimization, RDO)的多模式帧间编码方法, 以更好地提高预测精度和降低码率消耗. 实验结果表明, 提出的改进算法相较于V-PCC实现了−22.57%的BD-BR (Bjontegaard delta bit rate)增益. 该算法特别适用于视频监控和视频会议等帧间变化不大的动态点云场景.



2023, 49(8): 1723-1731.
doi: 10.16383/j.aas.c220523
摘要:
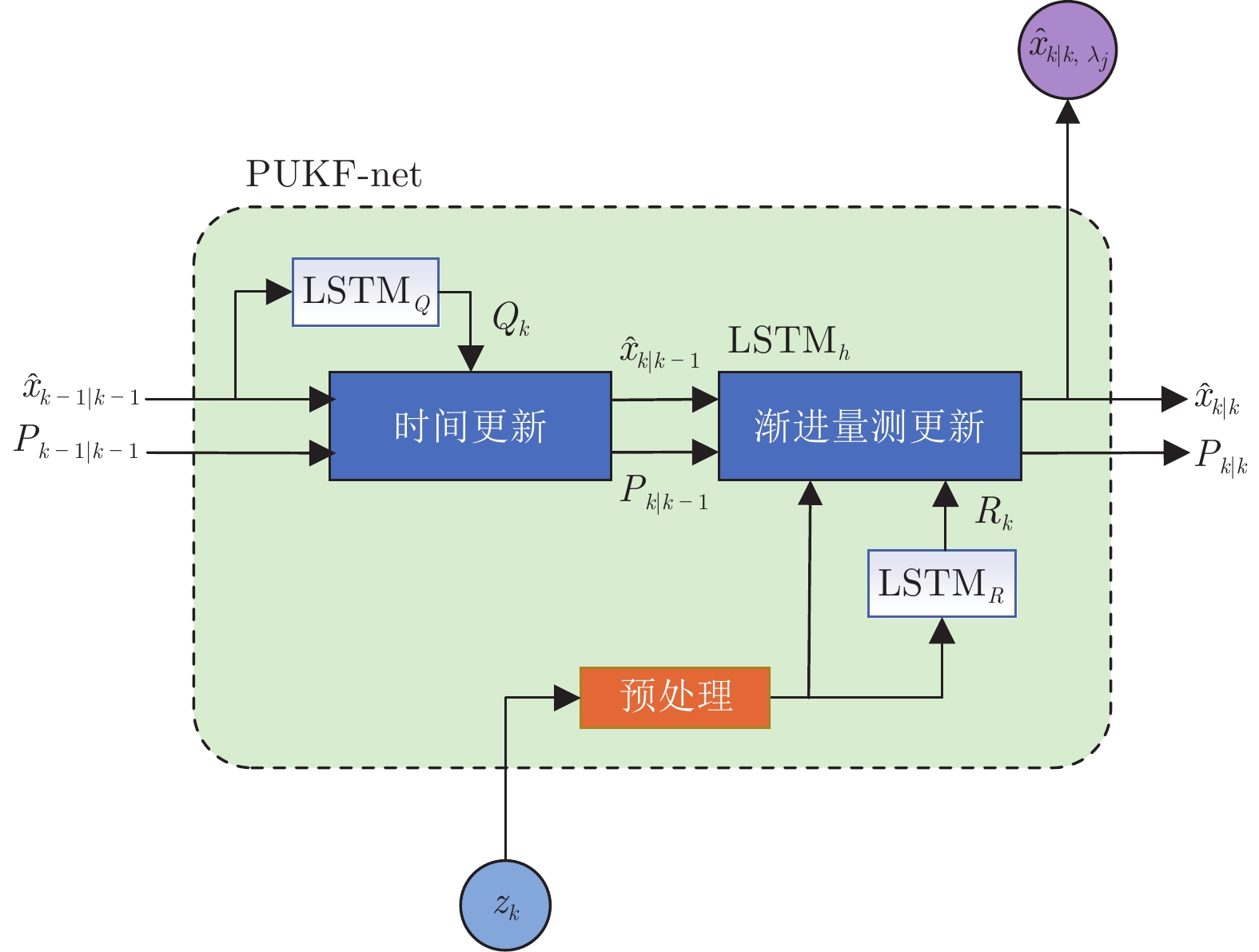
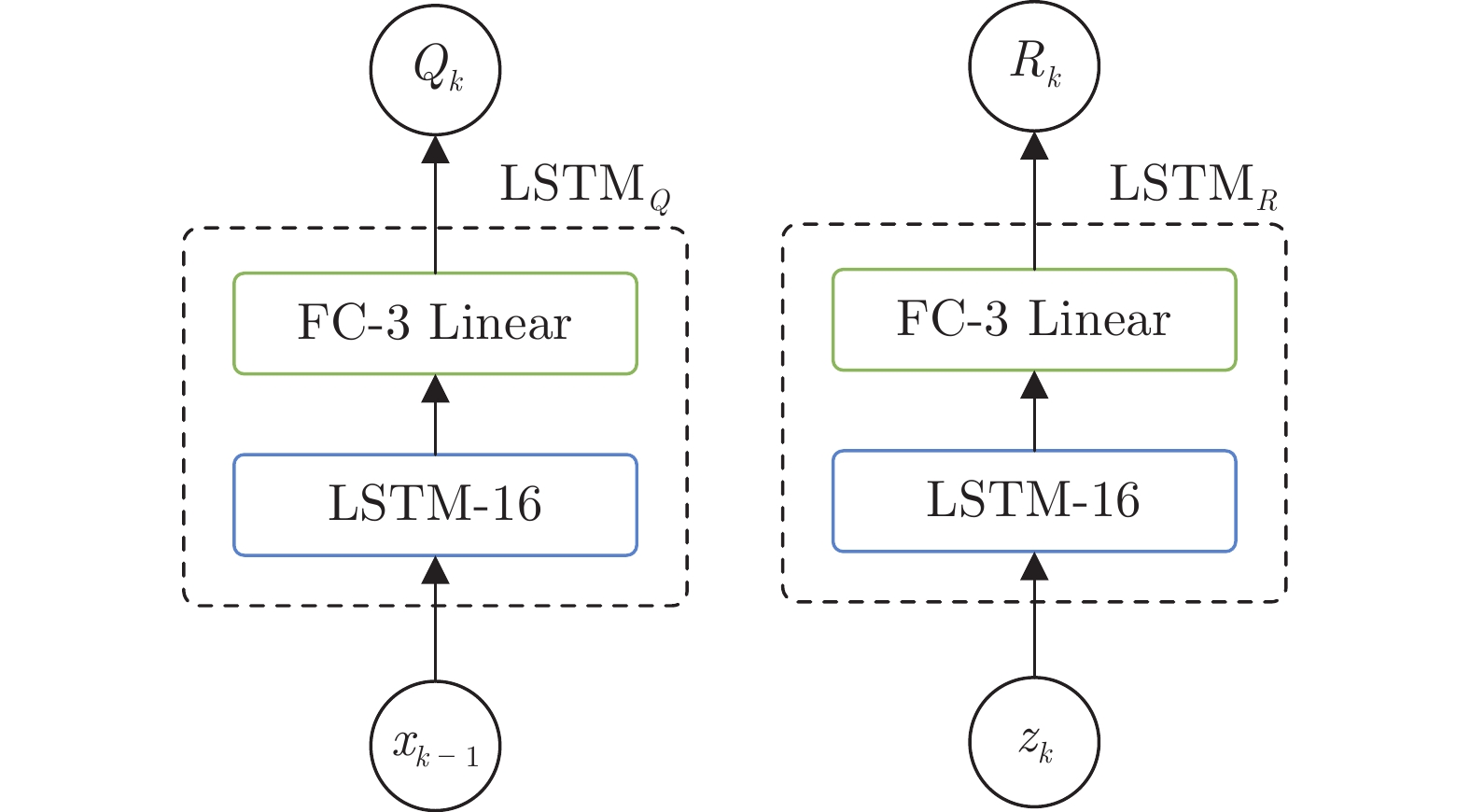
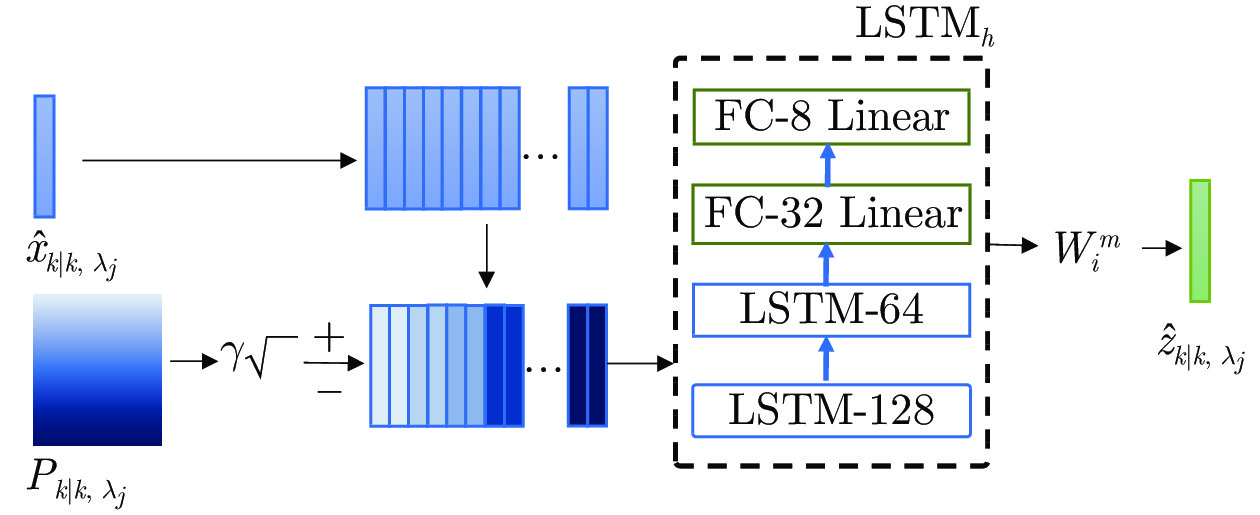
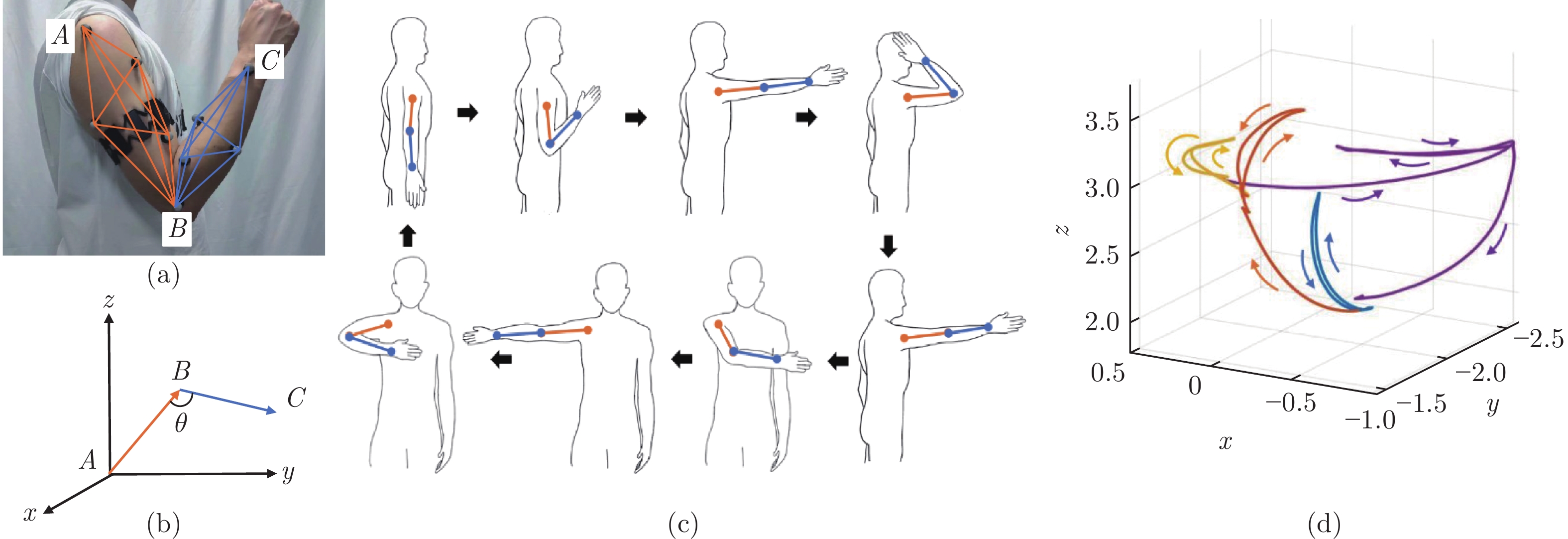
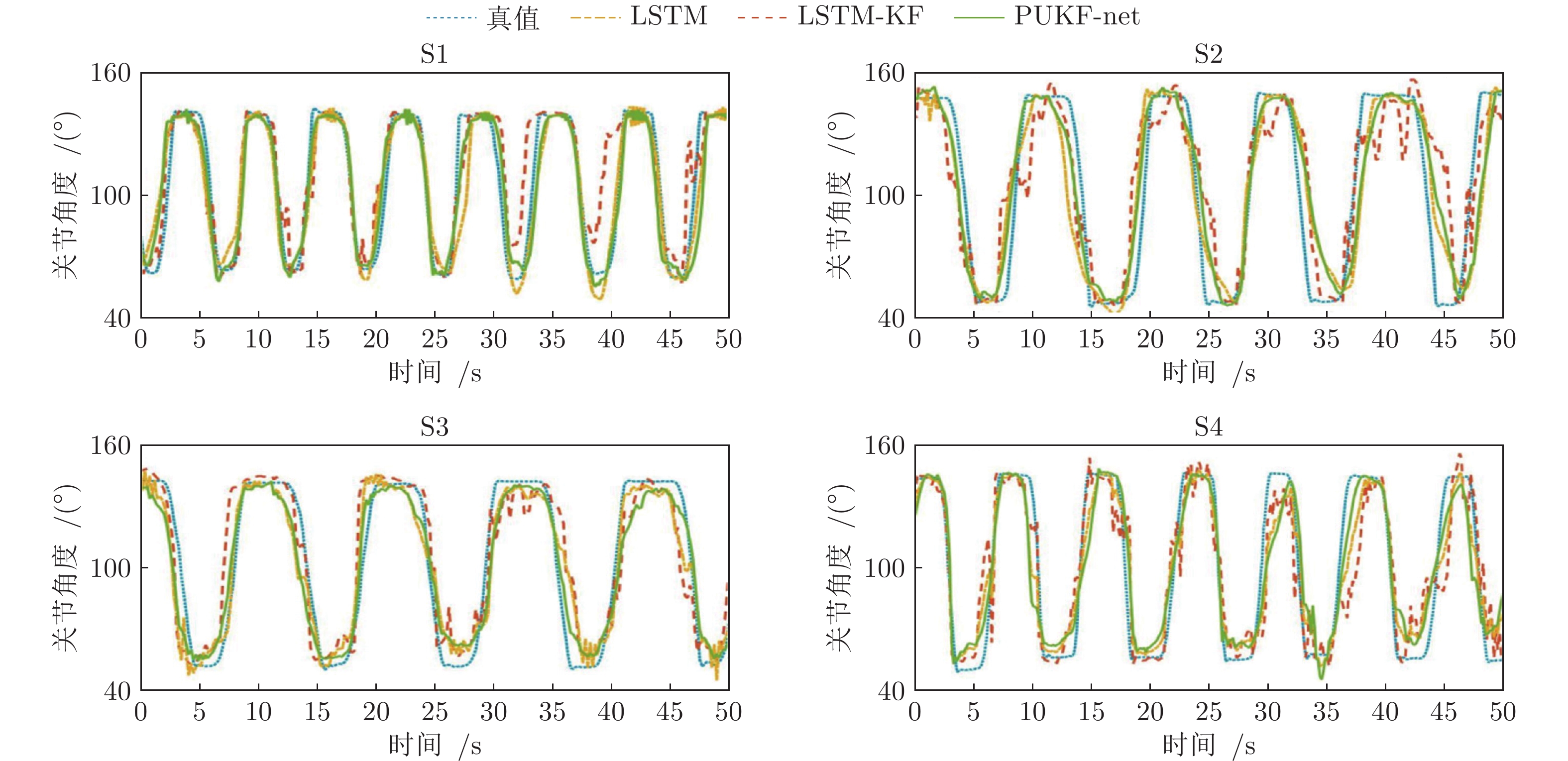
针对基于表面肌电信号 (Surface electromyography, sEMG) 的人体肢体运动估计建模困难的问题, 提出一种渐进无迹卡尔曼滤波网络 (Progressive unscented Kalman filter network, PUKF-net), 来实现降低肢体运动与sEMG量测的建模难度以及提高肢体运动估计精度的目的. 首先, 设计深度神经网络从sEMG数据中学习肢体运动状态与sEMG量测之间的映射关系和噪声统计特性. 其次, 采用渐进量测更新方法对先验状态估计进行修正, 减小运动估计的线性化误差, 提高PUKF-net模型的稳定性. 通过结合深度神经网络和渐进卡尔曼滤波的优势, 使得PUKF-net具有良好的模型适应性和抗噪能力. 最后, 设计基于sEMG的人体肢体运动估计实验, 验证了PUKF-net模型的有效性. 相较于长短期记忆网络 (Long short-term memory, LSTM) 和其他卡尔曼滤波网络, PUKF-net在肢体运动估计中的均方根误差 (Root mean square error, RMSE) 下降了14.9%, 相关系数R2提高了5.1%.
针对基于表面肌电信号 (Surface electromyography, sEMG) 的人体肢体运动估计建模困难的问题, 提出一种渐进无迹卡尔曼滤波网络 (Progressive unscented Kalman filter network, PUKF-net), 来实现降低肢体运动与sEMG量测的建模难度以及提高肢体运动估计精度的目的. 首先, 设计深度神经网络从sEMG数据中学习肢体运动状态与sEMG量测之间的映射关系和噪声统计特性. 其次, 采用渐进量测更新方法对先验状态估计进行修正, 减小运动估计的线性化误差, 提高PUKF-net模型的稳定性. 通过结合深度神经网络和渐进卡尔曼滤波的优势, 使得PUKF-net具有良好的模型适应性和抗噪能力. 最后, 设计基于sEMG的人体肢体运动估计实验, 验证了PUKF-net模型的有效性. 相较于长短期记忆网络 (Long short-term memory, LSTM) 和其他卡尔曼滤波网络, PUKF-net在肢体运动估计中的均方根误差 (Root mean square error, RMSE) 下降了14.9%, 相关系数R2提高了5.1%.

2023, 49(8): 1732-1744.
doi: 10.16383/j.aas.c220629
摘要:
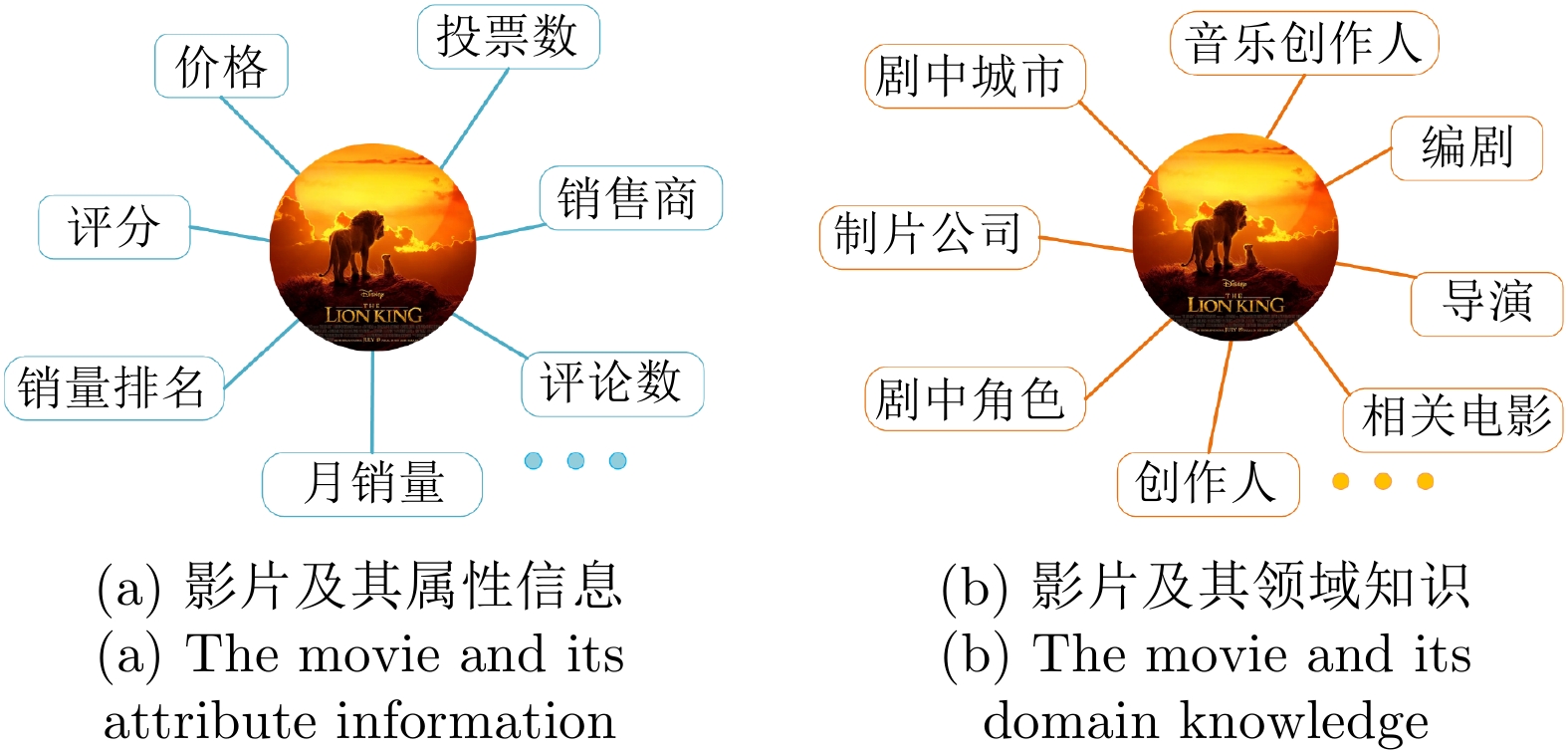
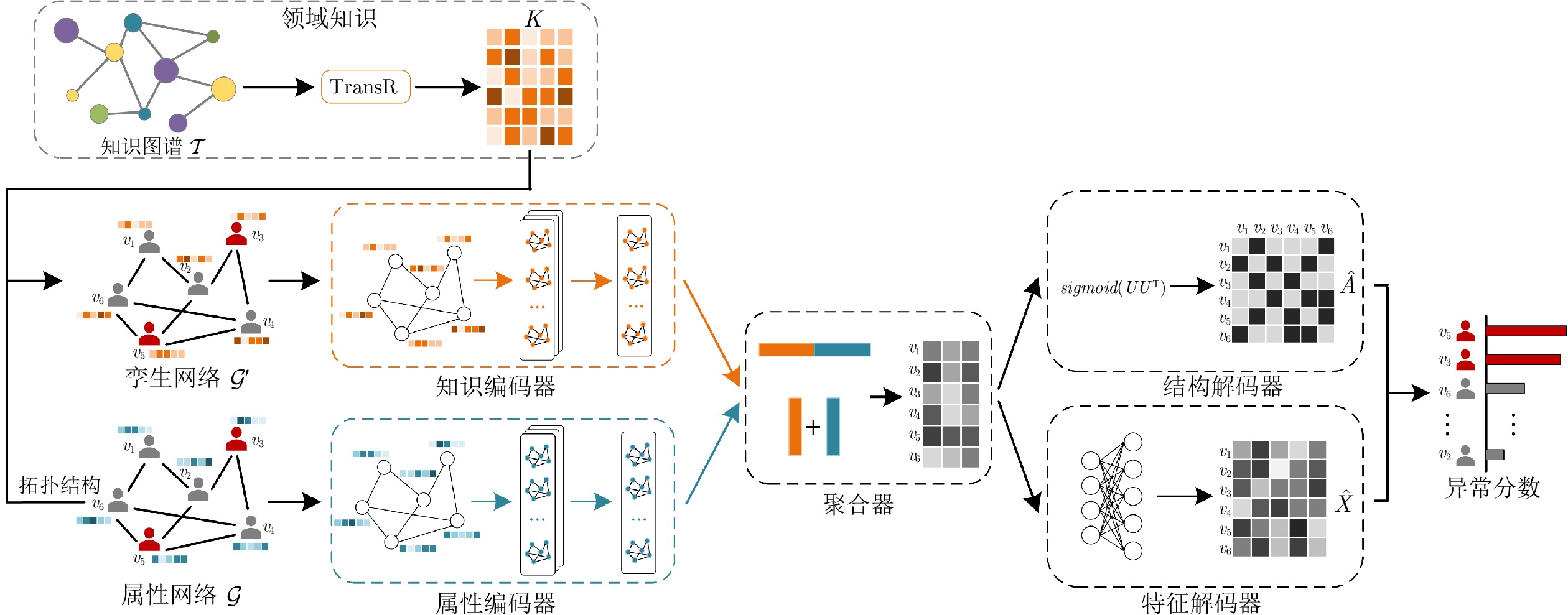
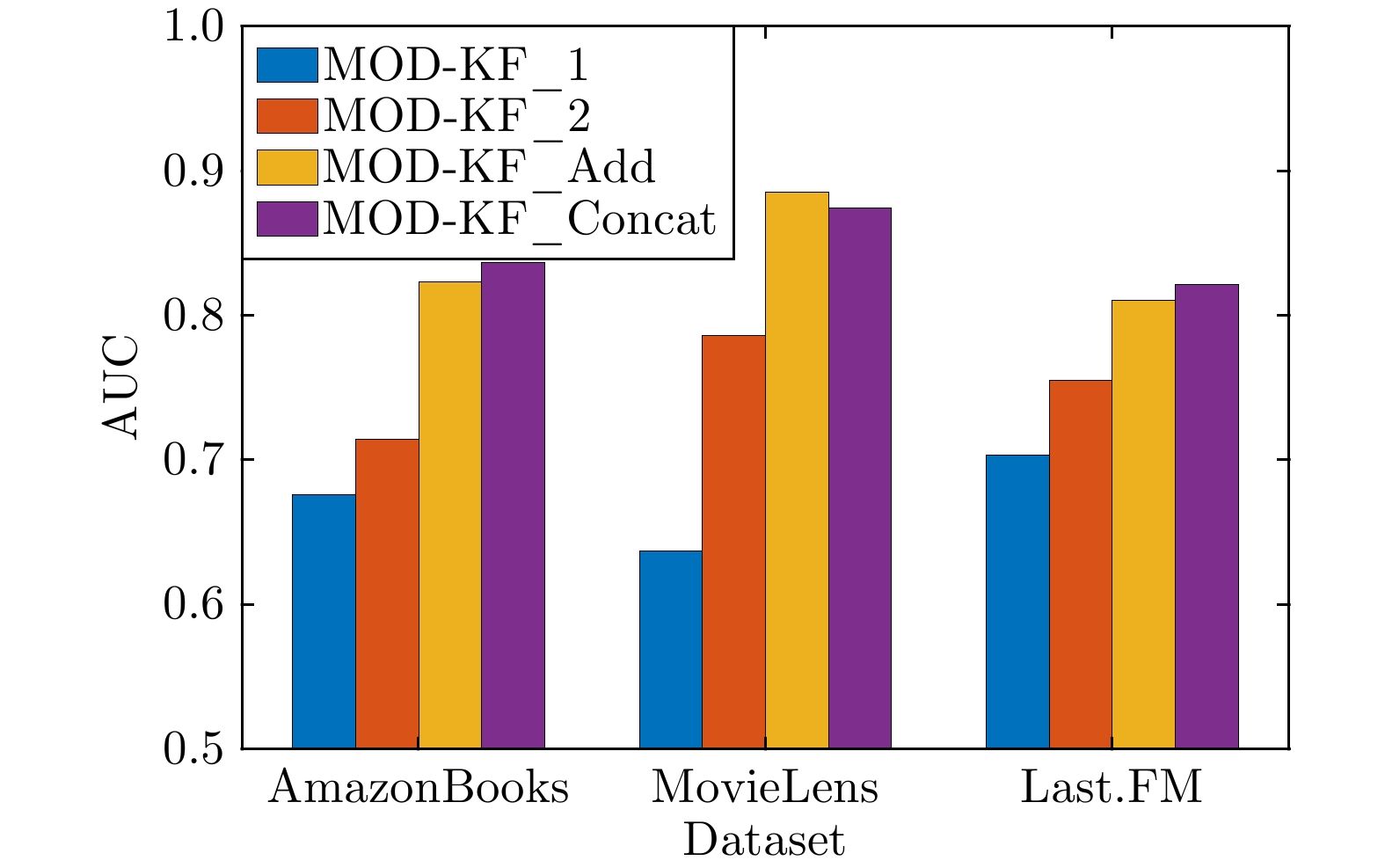
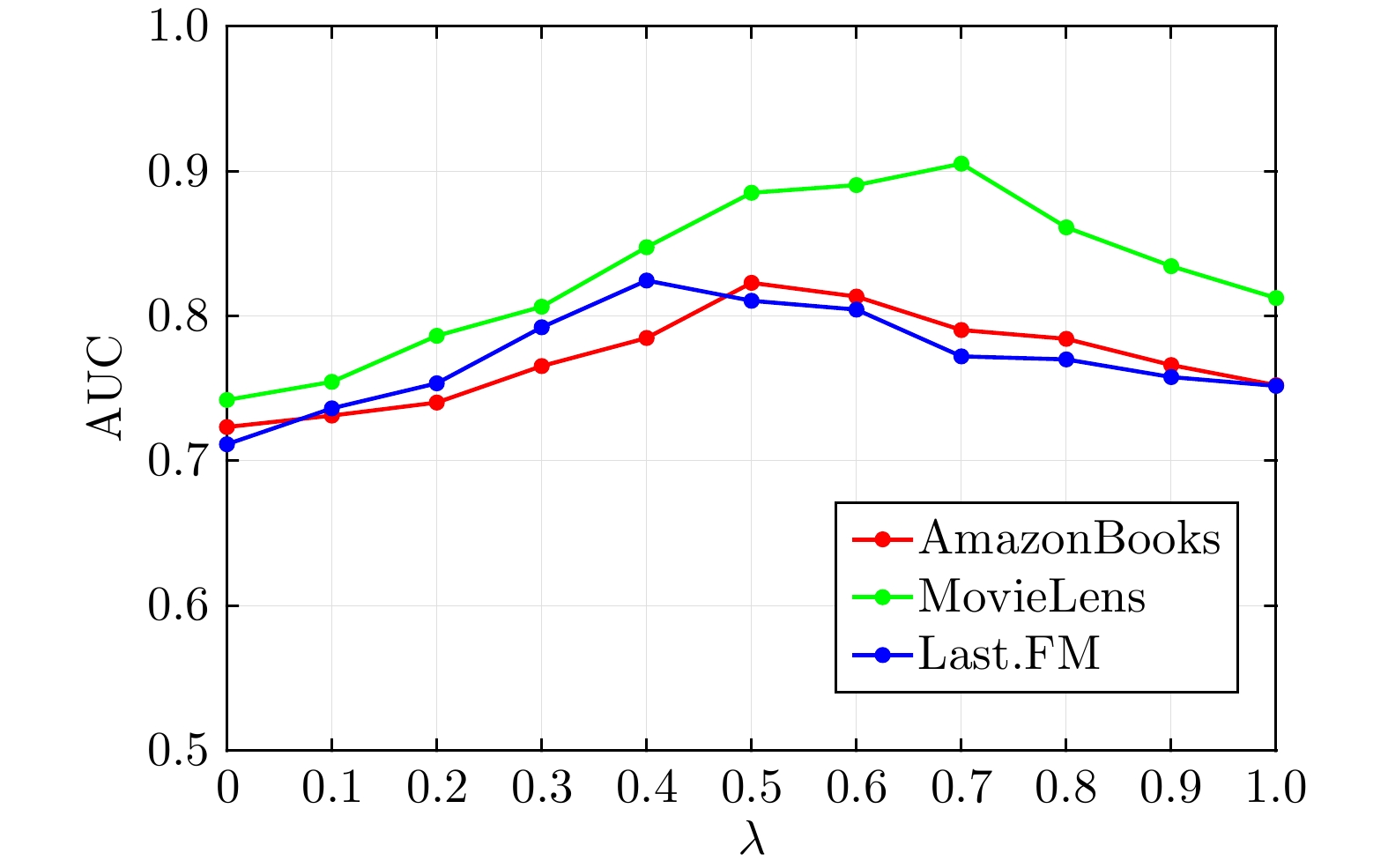
属性网络异常检测在网络安全、电子商务和金融交易等领域中具有重要的理论与现实意义, 近年来受到了越来越多的关注. 大多数异常检测方法凭借网络有限的属性或结构信息进行决策生成, 往往难以对异常模式做出可靠的描述. 此外, 网络节点对应的实体往往关联着丰富的领域知识, 这些知识对于异常的识别具有重要的潜在价值. 针对上述情况, 提出一种融合知识的多视图网络异常检测模型, 在多视图学习模式下通过数据与知识的互补融合实现了对异常节点的有效识别. 首先, 使用TransR模型由领域知识图谱抽取知识向量表示, 并借助输入网络的拓扑关系构造其孪生网络. 接着, 在多视图学习框架下构建属性编码器和知识编码器, 分别将属性网络及其孪生网络嵌入到各自的表示空间, 并聚合为统一网络表示. 最后, 综合不同维度上的重构误差进行节点异常分数评价, 从而识别网络中的异常节点. 在真实网络数据集上的对比实验表明, 提出的模型能够实现对领域知识的有效融合, 并获得优于基线方法的异常检测性能.
属性网络异常检测在网络安全、电子商务和金融交易等领域中具有重要的理论与现实意义, 近年来受到了越来越多的关注. 大多数异常检测方法凭借网络有限的属性或结构信息进行决策生成, 往往难以对异常模式做出可靠的描述. 此外, 网络节点对应的实体往往关联着丰富的领域知识, 这些知识对于异常的识别具有重要的潜在价值. 针对上述情况, 提出一种融合知识的多视图网络异常检测模型, 在多视图学习模式下通过数据与知识的互补融合实现了对异常节点的有效识别. 首先, 使用TransR模型由领域知识图谱抽取知识向量表示, 并借助输入网络的拓扑关系构造其孪生网络. 接着, 在多视图学习框架下构建属性编码器和知识编码器, 分别将属性网络及其孪生网络嵌入到各自的表示空间, 并聚合为统一网络表示. 最后, 综合不同维度上的重构误差进行节点异常分数评价, 从而识别网络中的异常节点. 在真实网络数据集上的对比实验表明, 提出的模型能够实现对领域知识的有效融合, 并获得优于基线方法的异常检测性能.

2023, 49(8): 1745-1757.
doi: 10.16383/j.aas.c210147
摘要:
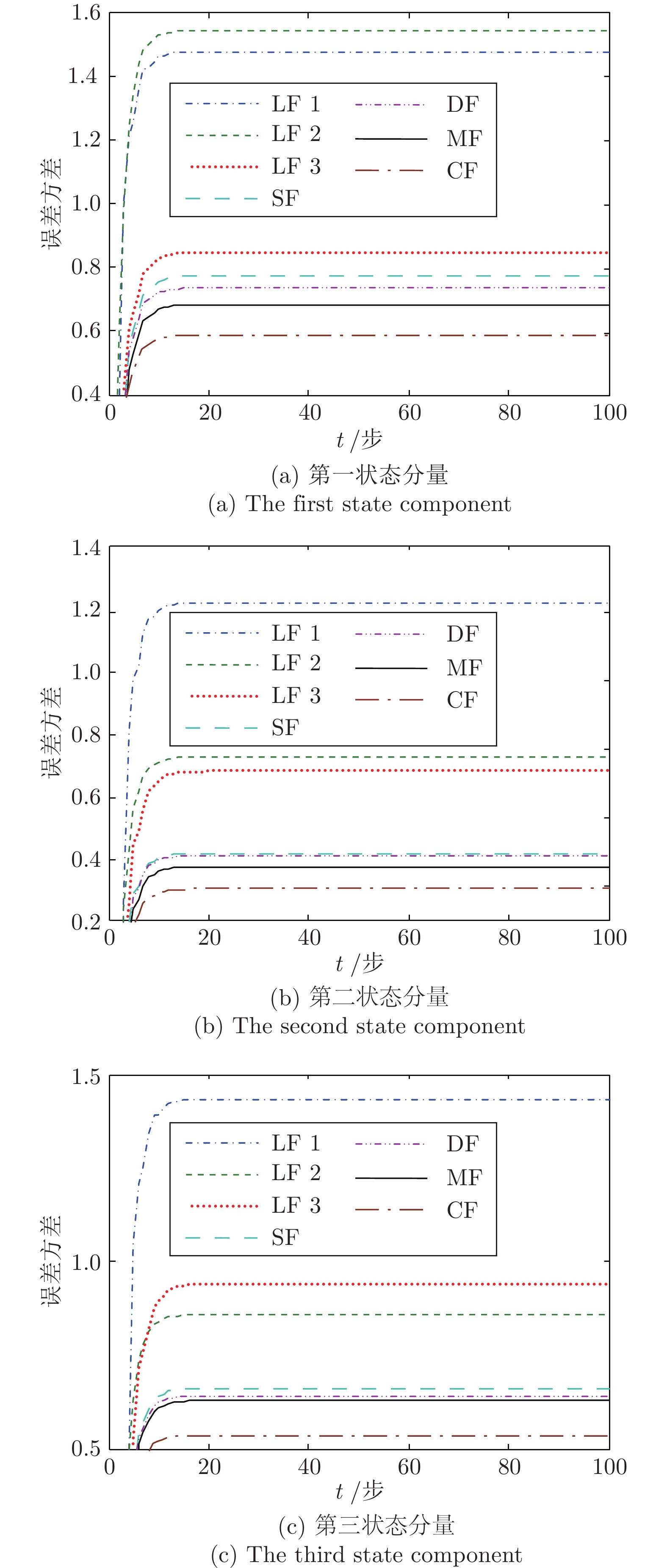
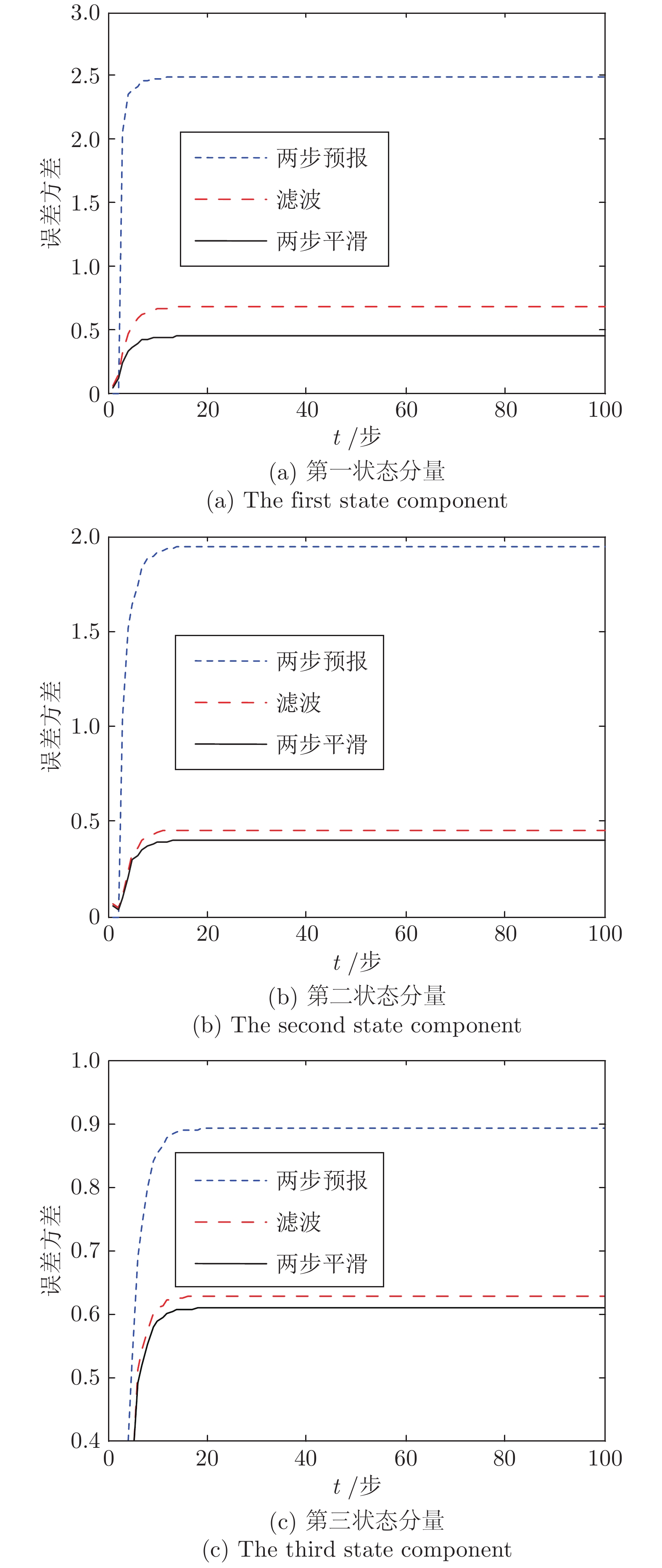
研究带时间相关乘性噪声多传感器系统的分布式融合估计问题, 其中时间相关的乘性噪声满足一阶高斯−马尔科夫过程. 通过引入虚拟状态和虚拟过程噪声, 构建了虚拟状态的递推方程. 首先, 基于新息分析方法, 分别对系统状态和虚拟状态设计局部一步预报器. 然后, 基于一步预报器设计状态的局部线性滤波器、多步预报器和平滑器. 推导了任意两个局部状态估计误差之间的互协方差矩阵. 接着, 基于线性最小方差意义下的矩阵加权、对角矩阵加权和标量加权融合算法, 给出相应的分布式融合状态估值器. 最后, 分析算法的稳定性. 仿真研究验证了该算法的有效性.
研究带时间相关乘性噪声多传感器系统的分布式融合估计问题, 其中时间相关的乘性噪声满足一阶高斯−马尔科夫过程. 通过引入虚拟状态和虚拟过程噪声, 构建了虚拟状态的递推方程. 首先, 基于新息分析方法, 分别对系统状态和虚拟状态设计局部一步预报器. 然后, 基于一步预报器设计状态的局部线性滤波器、多步预报器和平滑器. 推导了任意两个局部状态估计误差之间的互协方差矩阵. 接着, 基于线性最小方差意义下的矩阵加权、对角矩阵加权和标量加权融合算法, 给出相应的分布式融合状态估值器. 最后, 分析算法的稳定性. 仿真研究验证了该算法的有效性.
2023, 49(8): 1758-1770.
doi: 10.16383/j.aas.c210001
摘要:
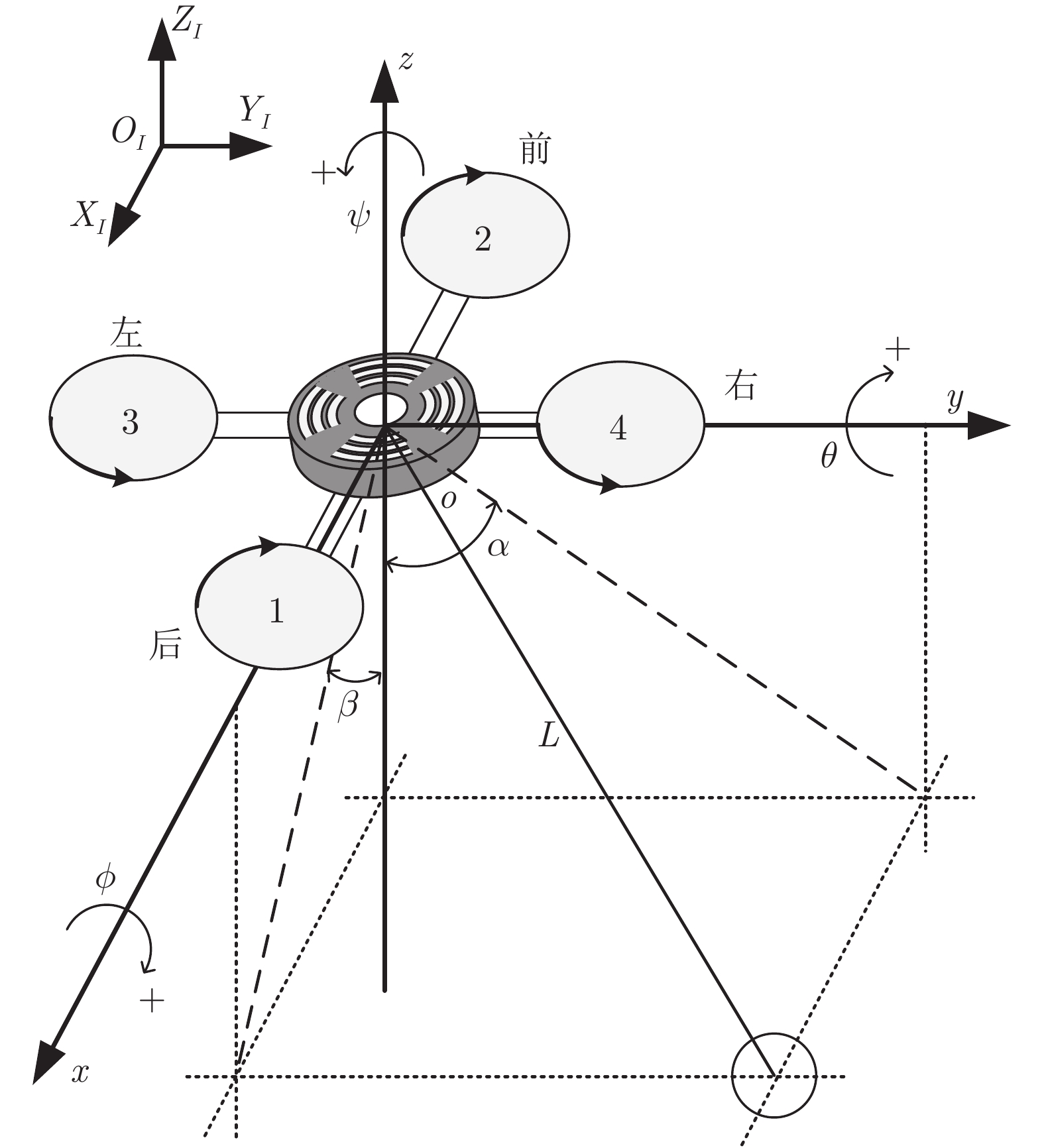
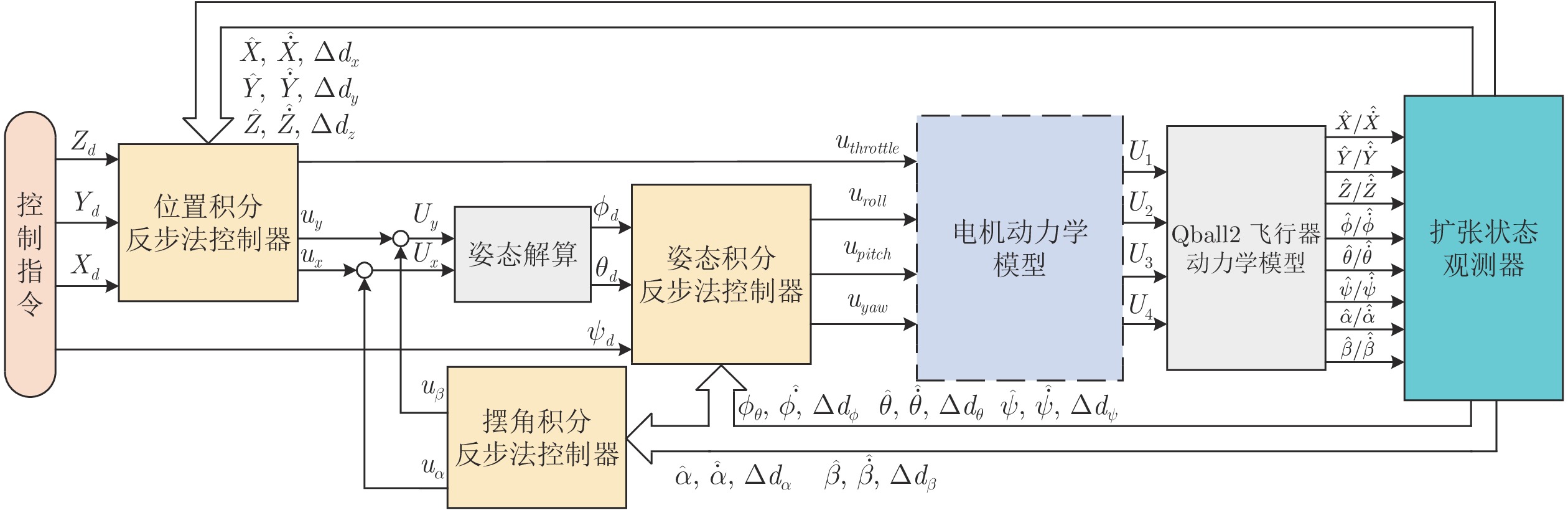
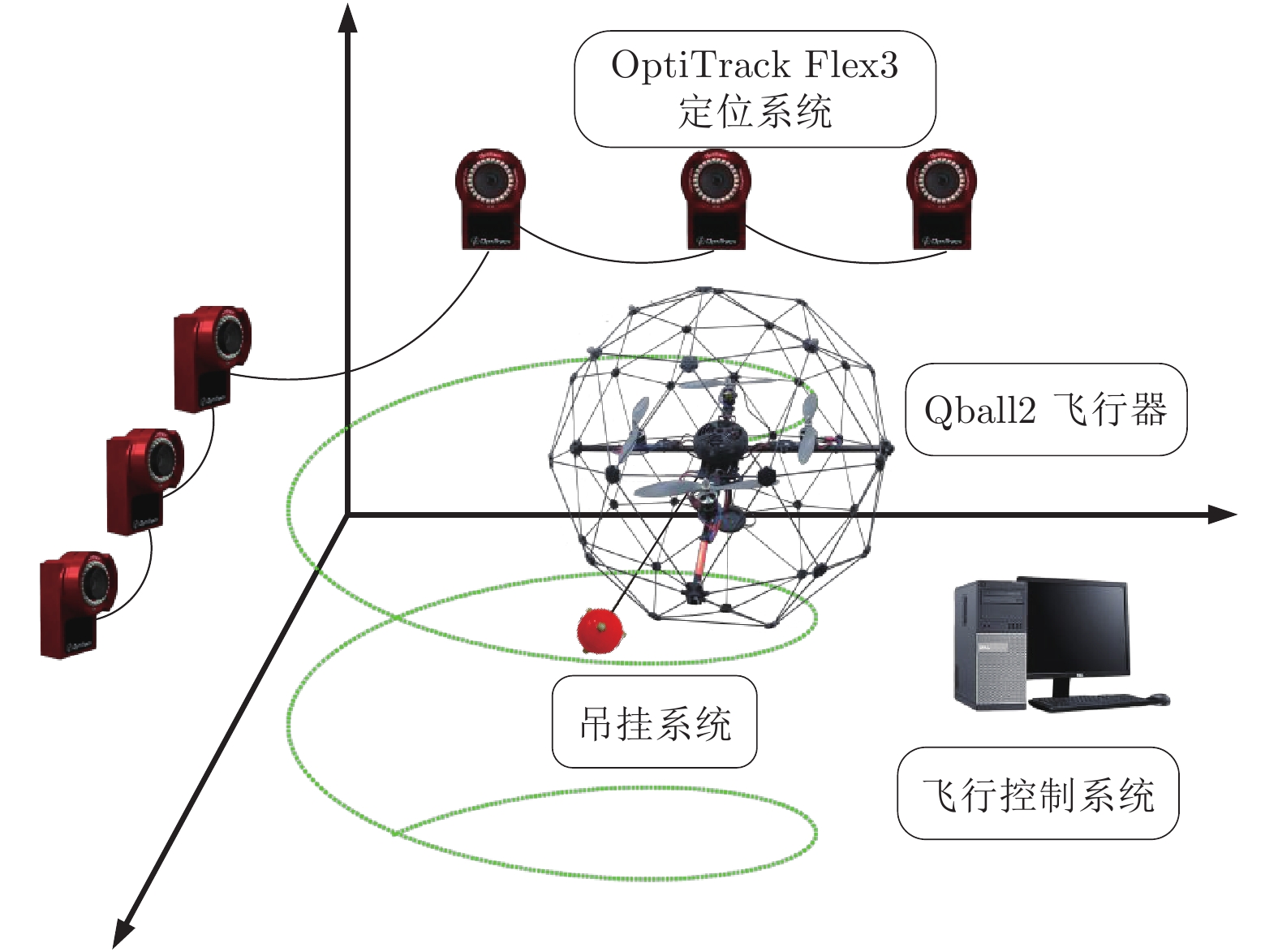
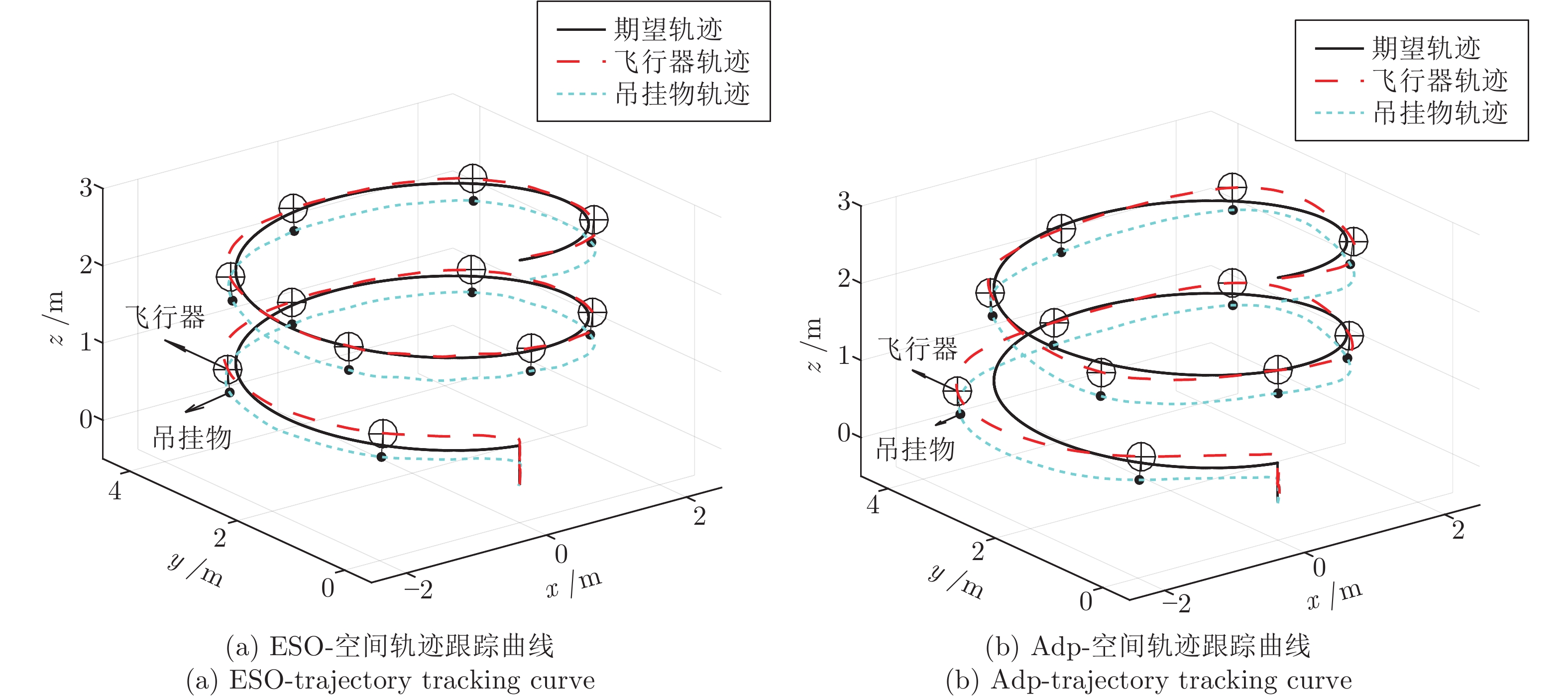
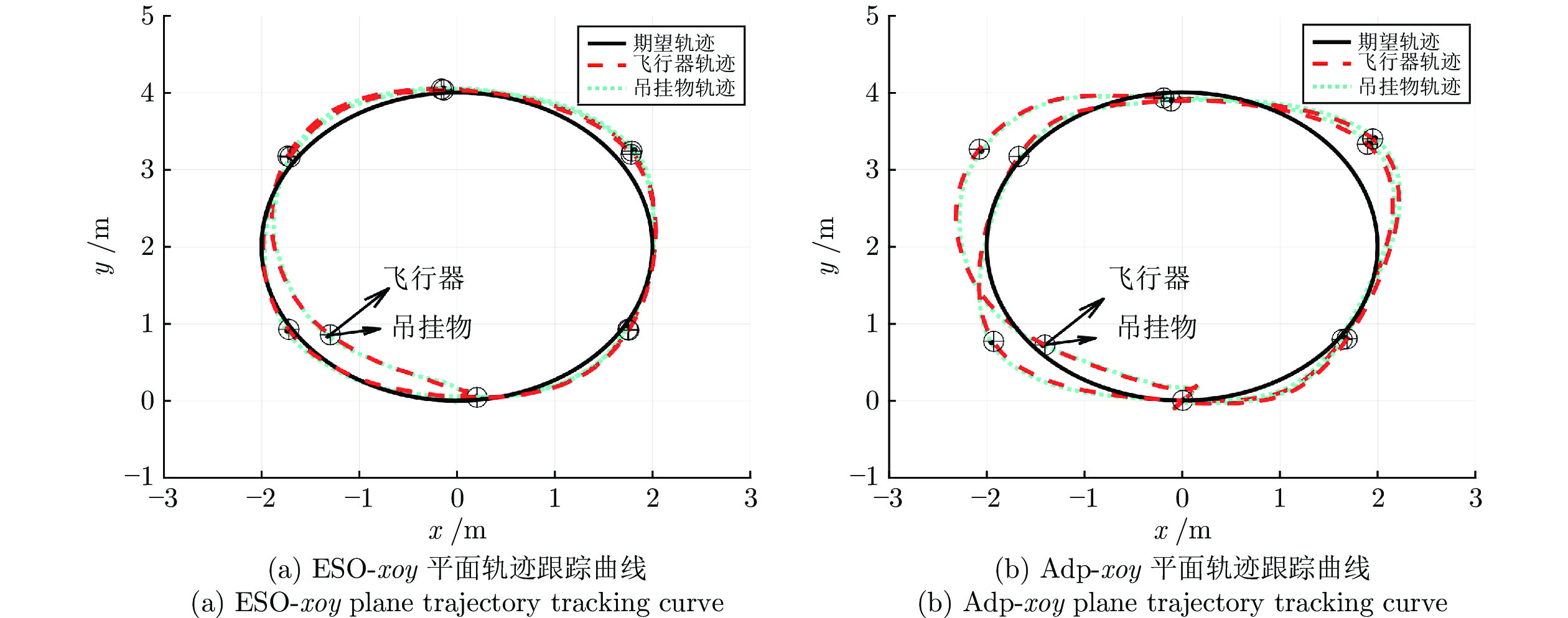
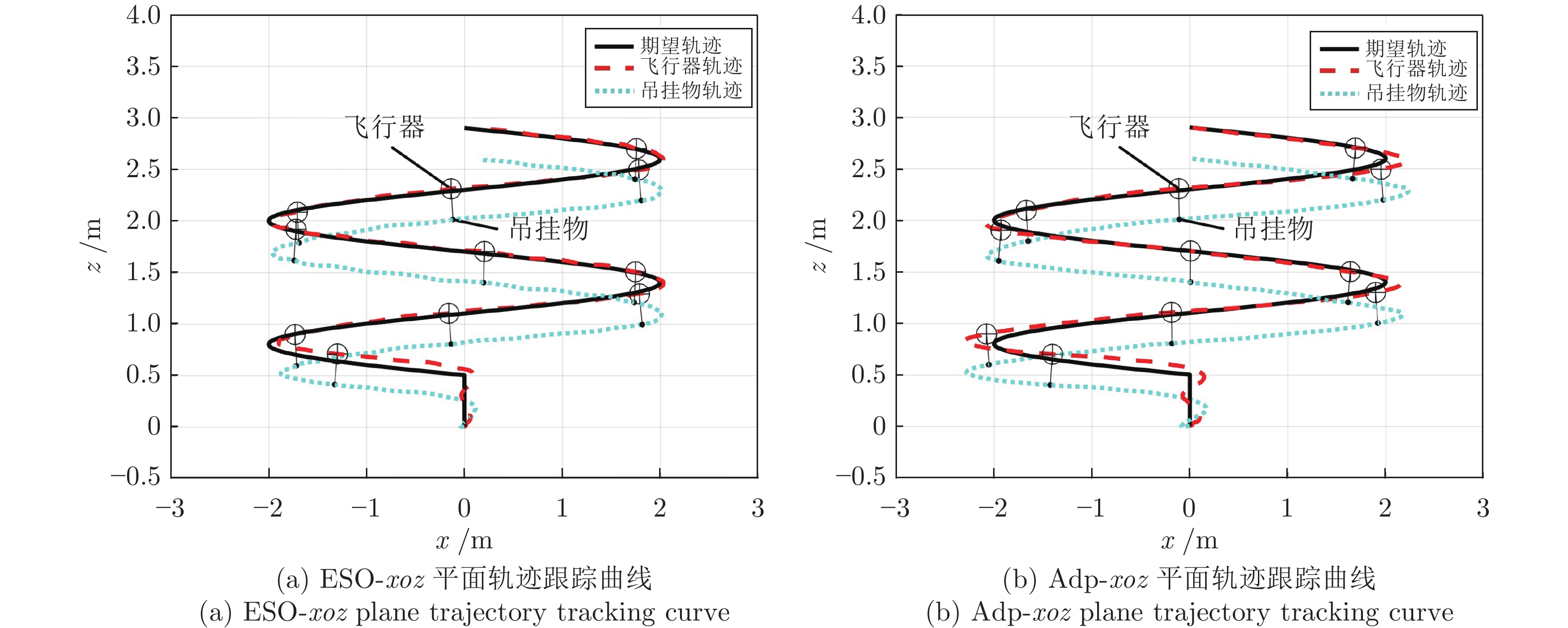
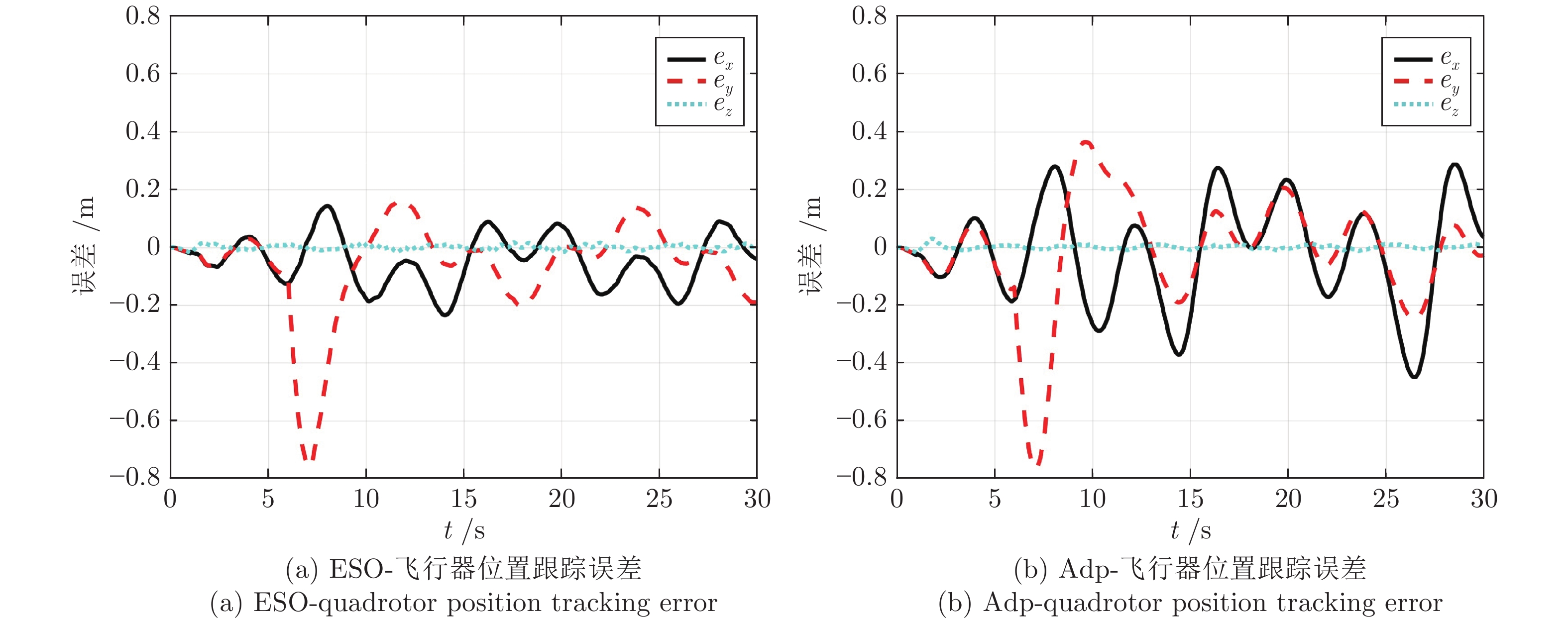
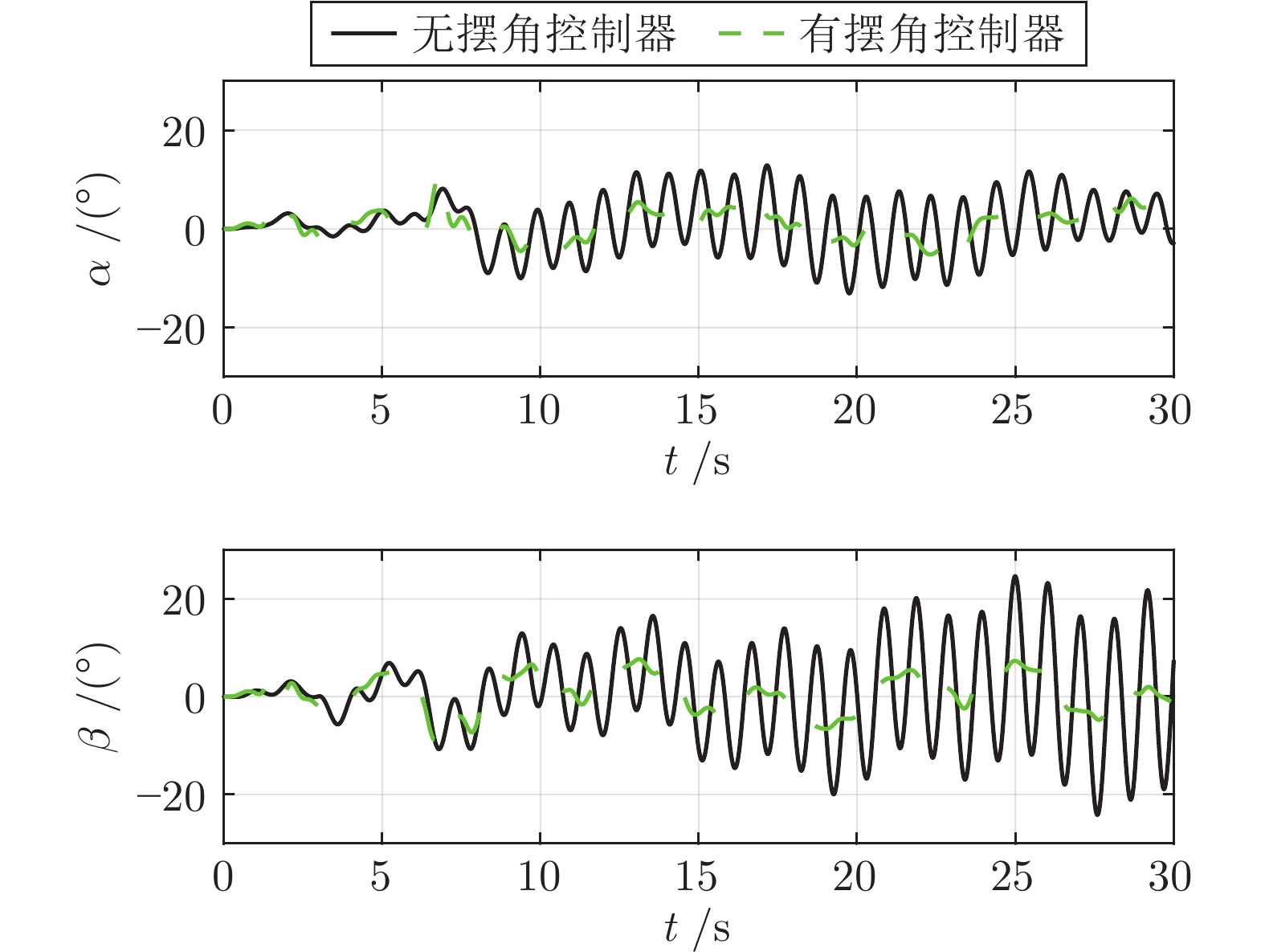
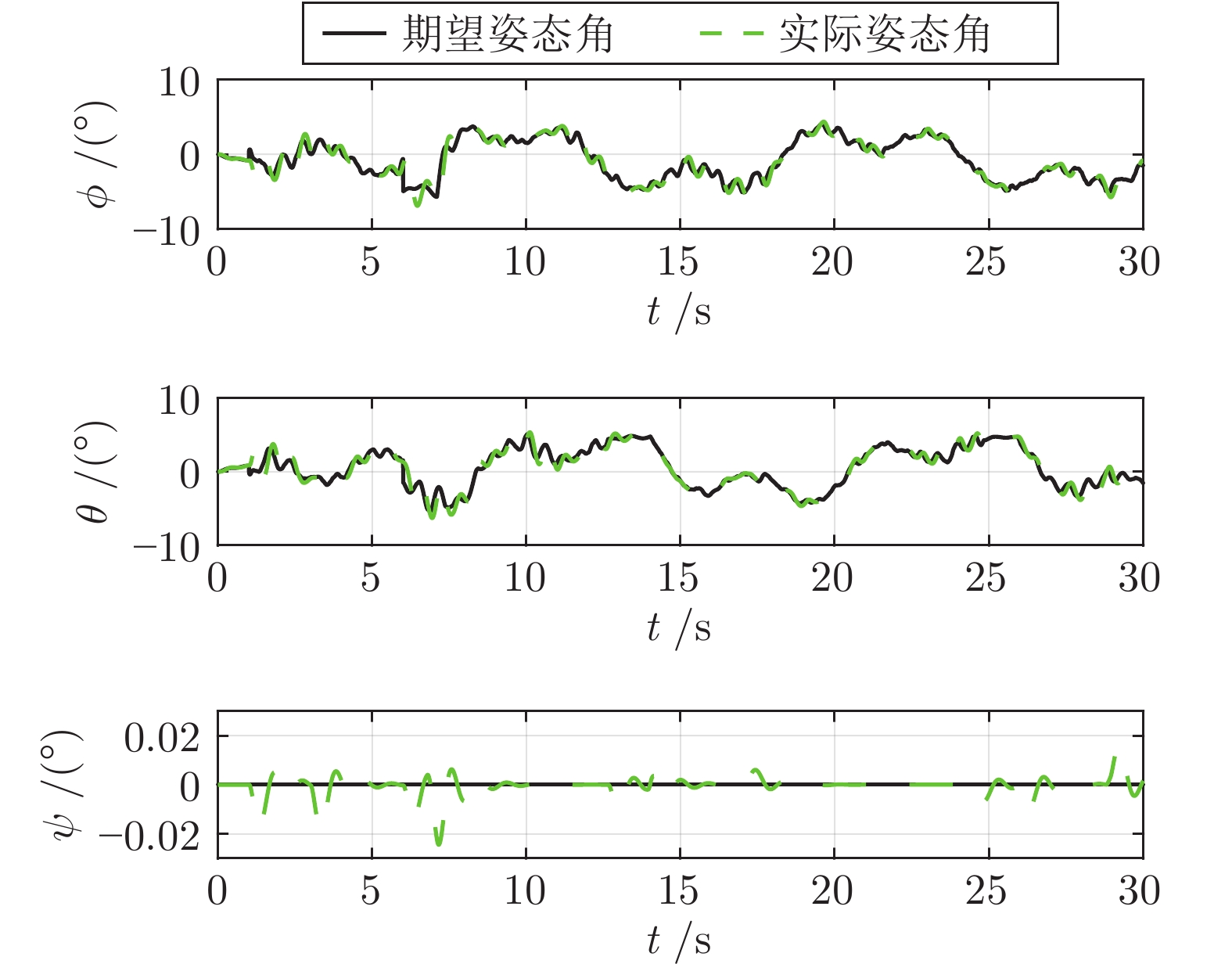
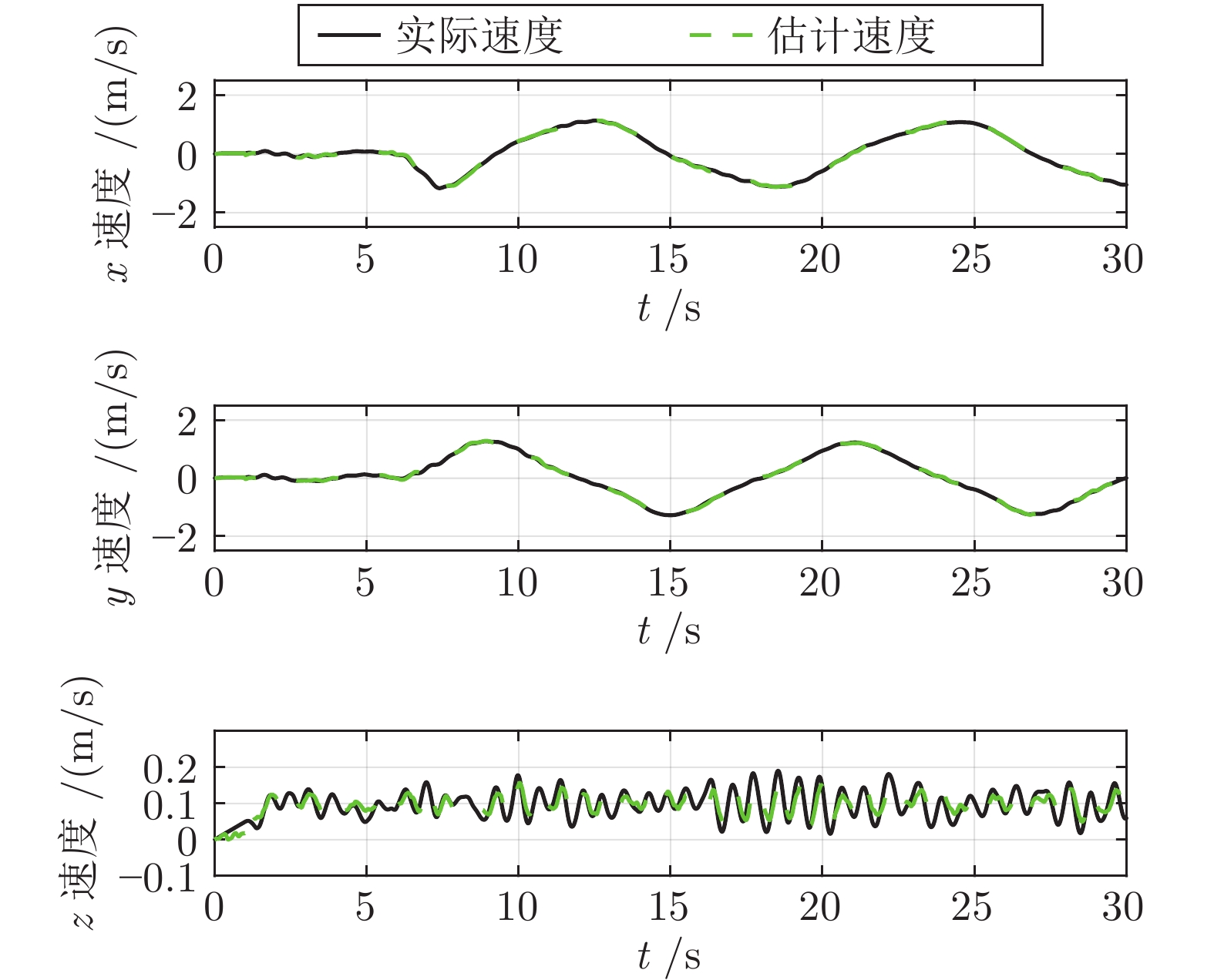
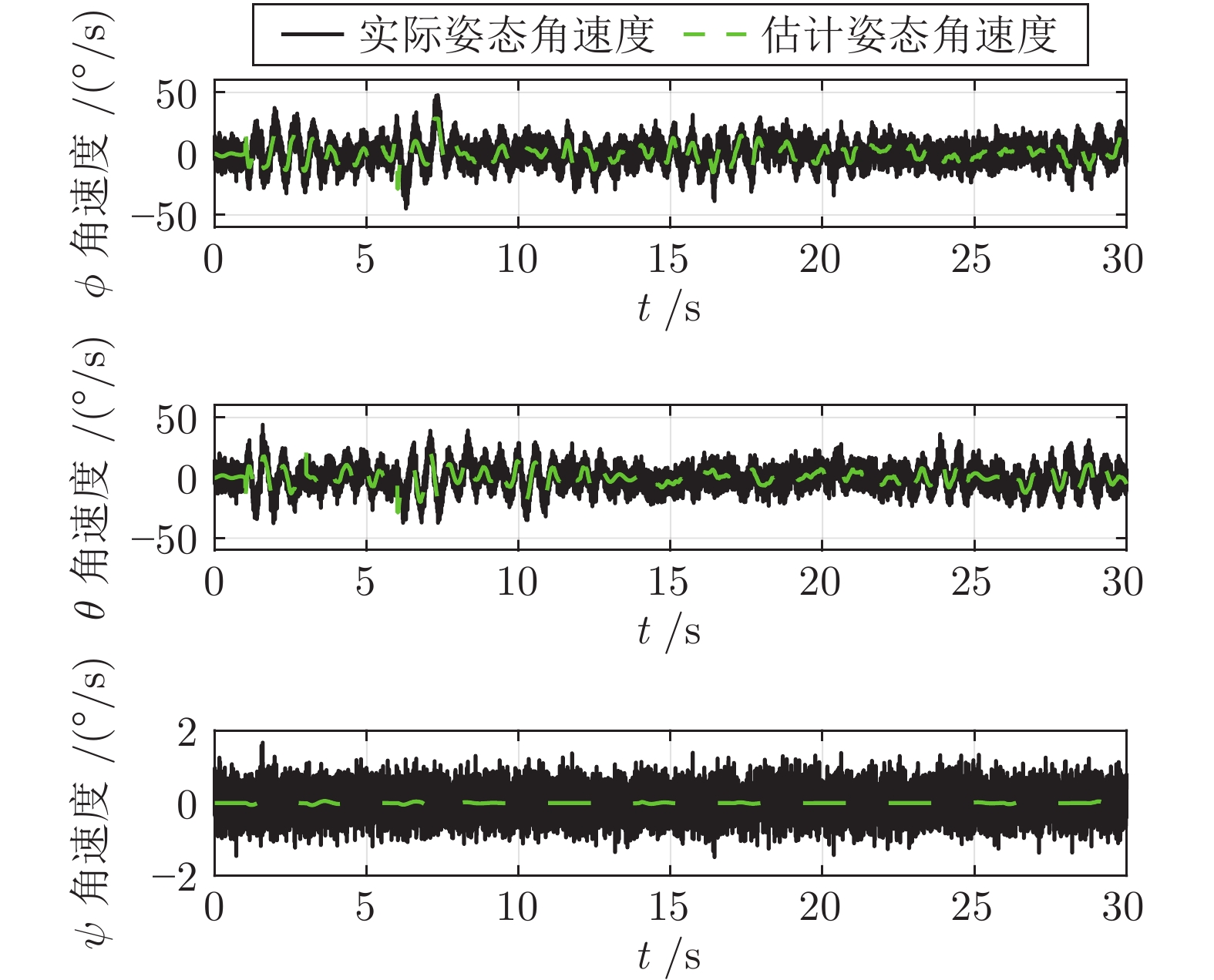
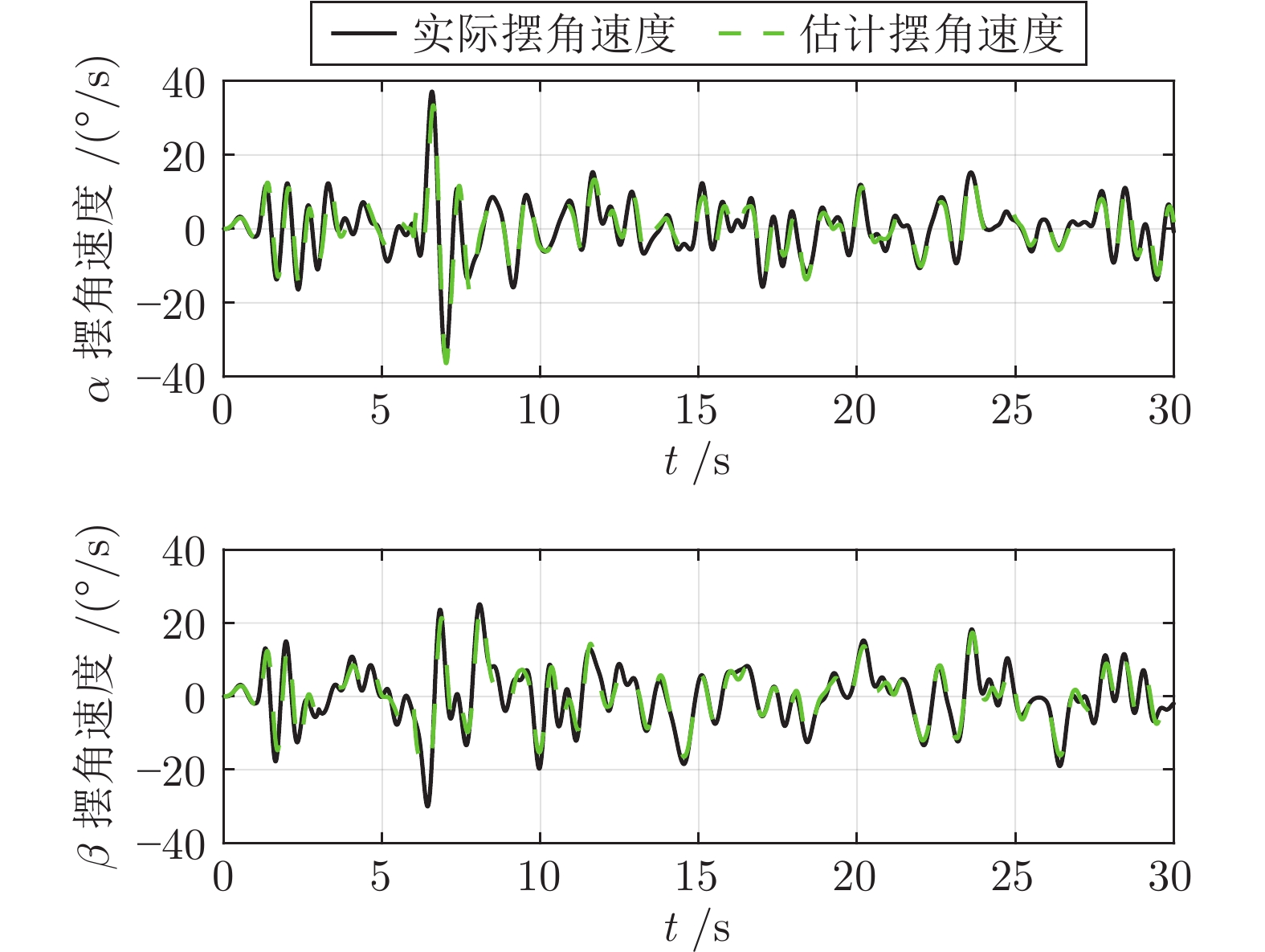
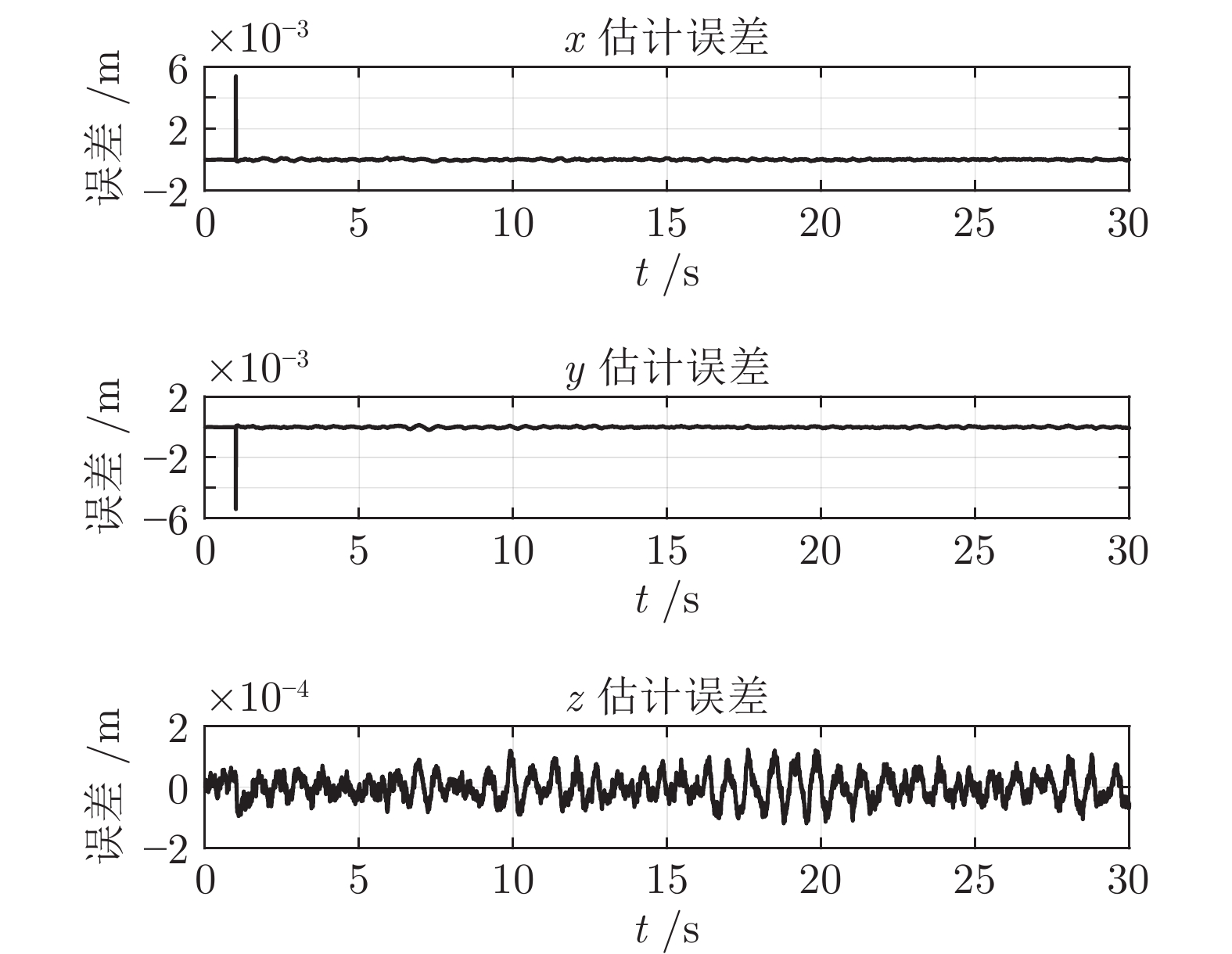
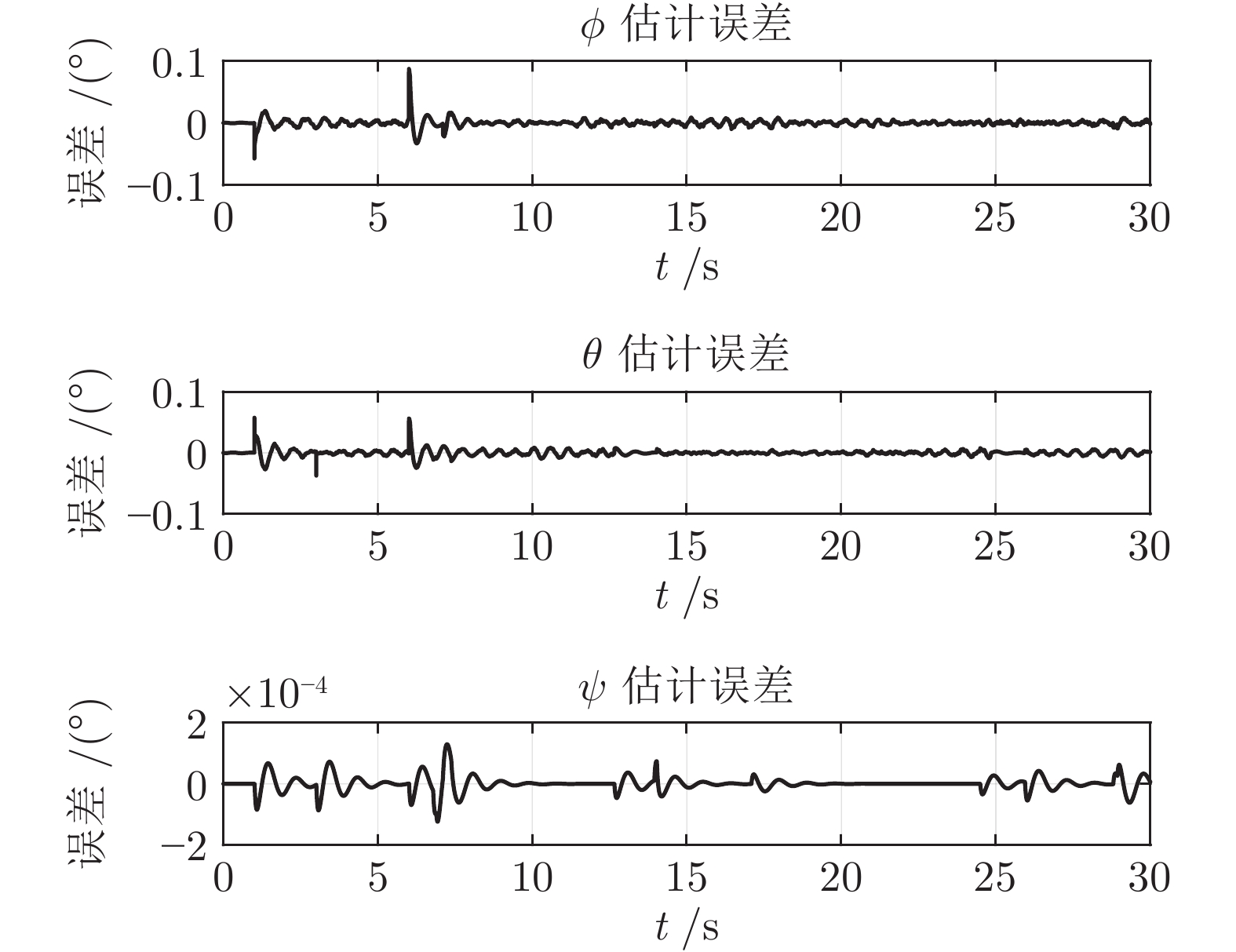
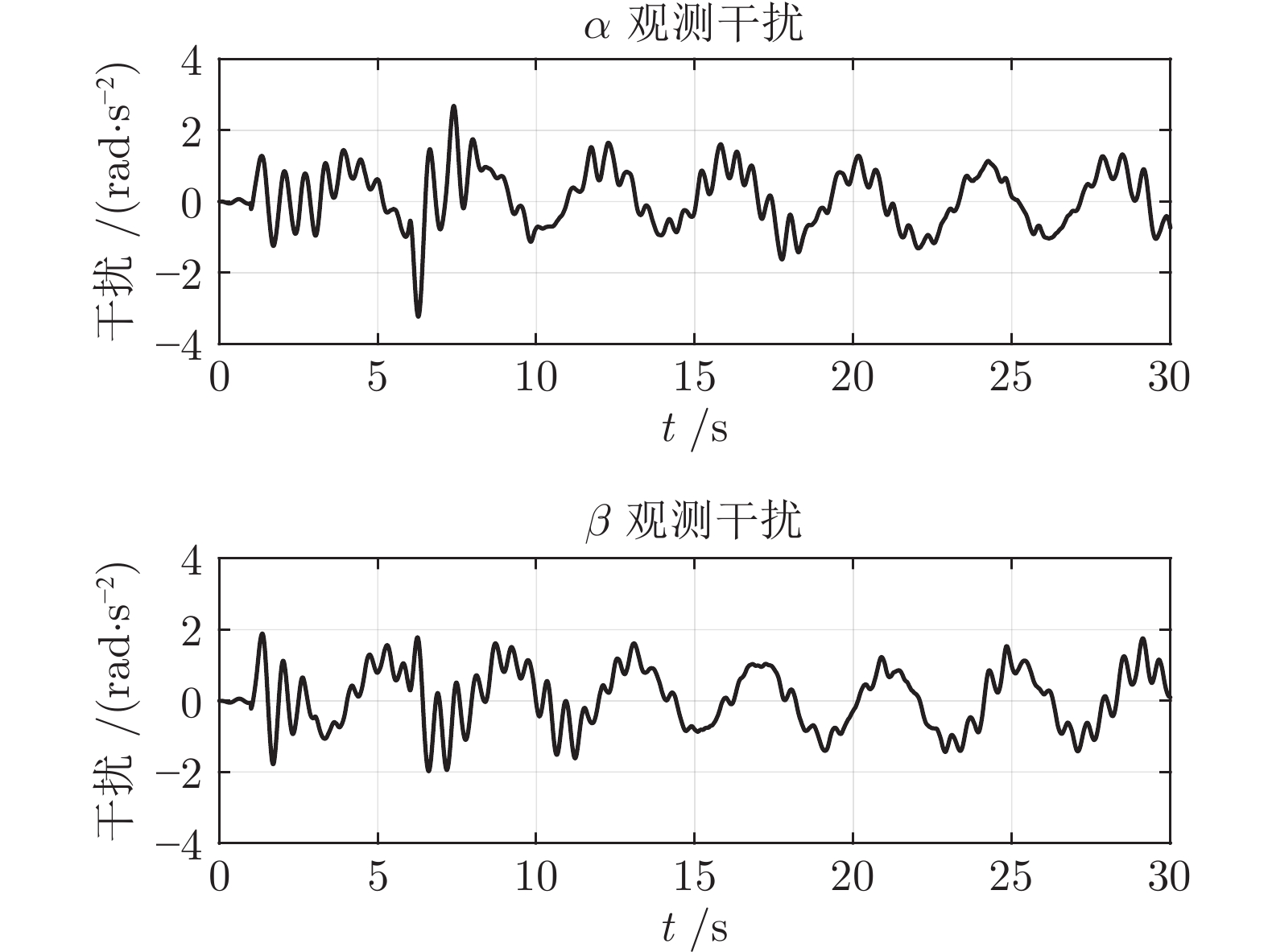
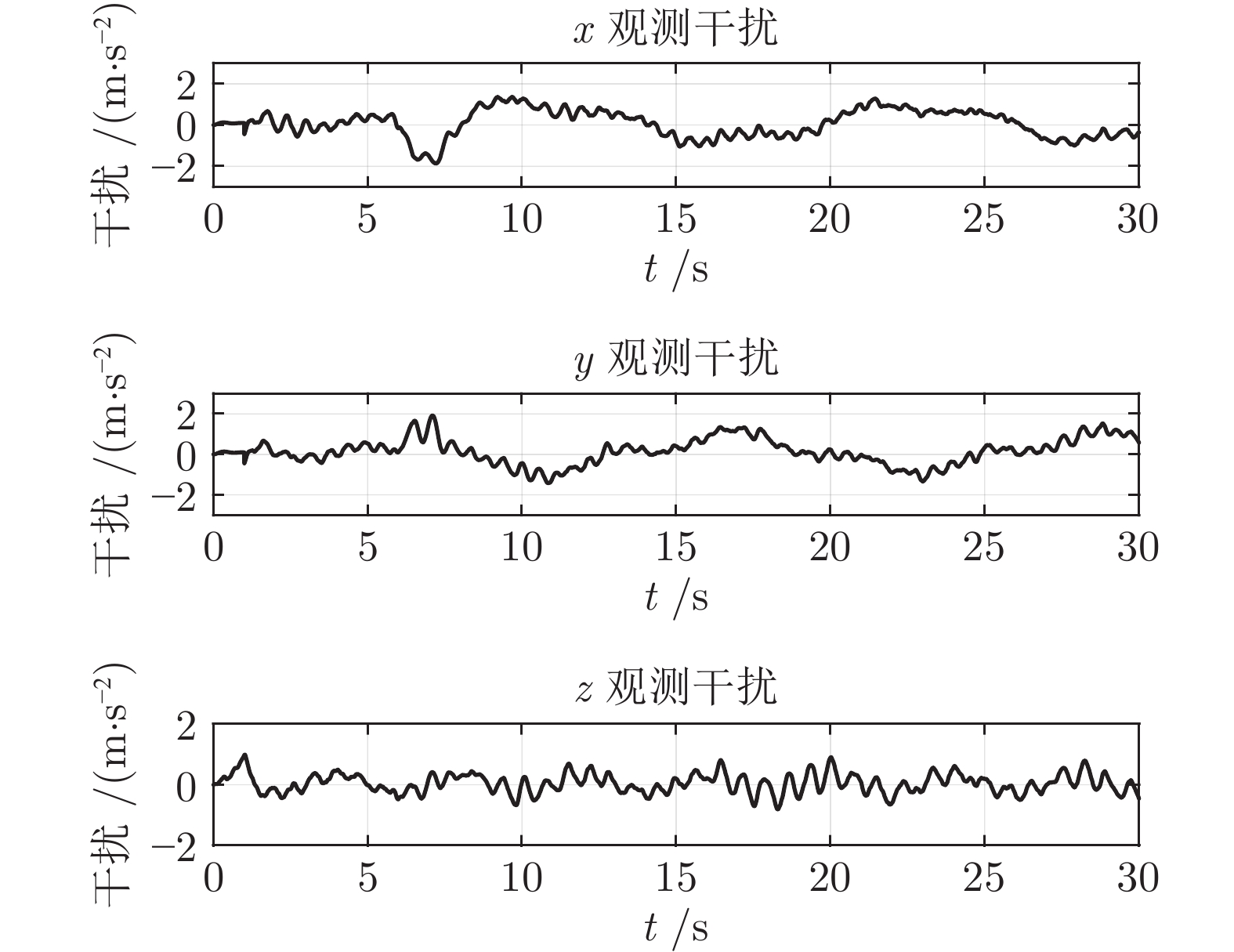
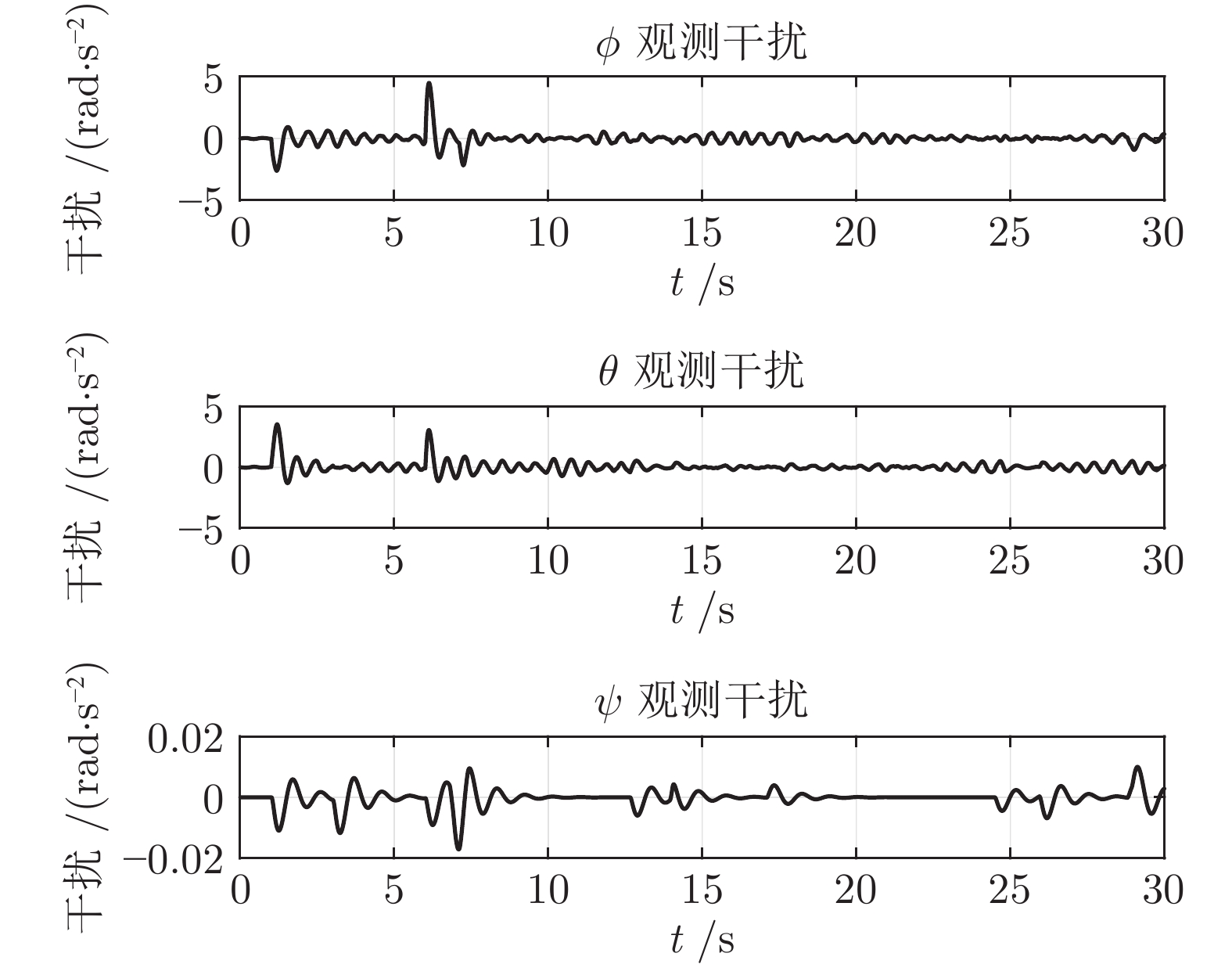
针对一类四旋翼飞行器吊挂飞行系统的负载摆动抑制和轨迹跟踪精确控制的问题, 考虑系统存在未知外界扰动和模型动态不确定的情况, 提出一种基于扩张状态观测器(Extended state observer, ESO)的吊挂负载摆动抑制的非线性轨迹跟踪控制方法. 将四旋翼吊挂飞行系统分解为姿态、位置和负载摆动控制三个动态子系统, 分别设计非线性控制器实现欠驱动约束下的解耦控制; 设计一种扩张状态观测器, 用以估计和补偿四旋翼与吊挂负载耦合飞行的未知外界扰动与模型动态不确定性, 并验证了闭环系统的稳定性, 跟踪误差及吊挂负载摆动所有信号的一致最终有界. 最后, 利用Quanser公司的Qball2飞行器进行三维空间螺旋轨迹的跟踪控制, 仿真结果验证了未知干扰下基于扩张状态观测器的四旋翼吊挂飞行非线性控制的有效性和优越性, 实现了四旋翼吊挂系统轨迹跟踪的精确控制和飞行过程中负载摆动的快速抑制.
针对一类四旋翼飞行器吊挂飞行系统的负载摆动抑制和轨迹跟踪精确控制的问题, 考虑系统存在未知外界扰动和模型动态不确定的情况, 提出一种基于扩张状态观测器(Extended state observer, ESO)的吊挂负载摆动抑制的非线性轨迹跟踪控制方法. 将四旋翼吊挂飞行系统分解为姿态、位置和负载摆动控制三个动态子系统, 分别设计非线性控制器实现欠驱动约束下的解耦控制; 设计一种扩张状态观测器, 用以估计和补偿四旋翼与吊挂负载耦合飞行的未知外界扰动与模型动态不确定性, 并验证了闭环系统的稳定性, 跟踪误差及吊挂负载摆动所有信号的一致最终有界. 最后, 利用Quanser公司的Qball2飞行器进行三维空间螺旋轨迹的跟踪控制, 仿真结果验证了未知干扰下基于扩张状态观测器的四旋翼吊挂飞行非线性控制的有效性和优越性, 实现了四旋翼吊挂系统轨迹跟踪的精确控制和飞行过程中负载摆动的快速抑制.

2023, 49(8): 1771-1784.
doi: 10.16383/j.aas.c220574
摘要:
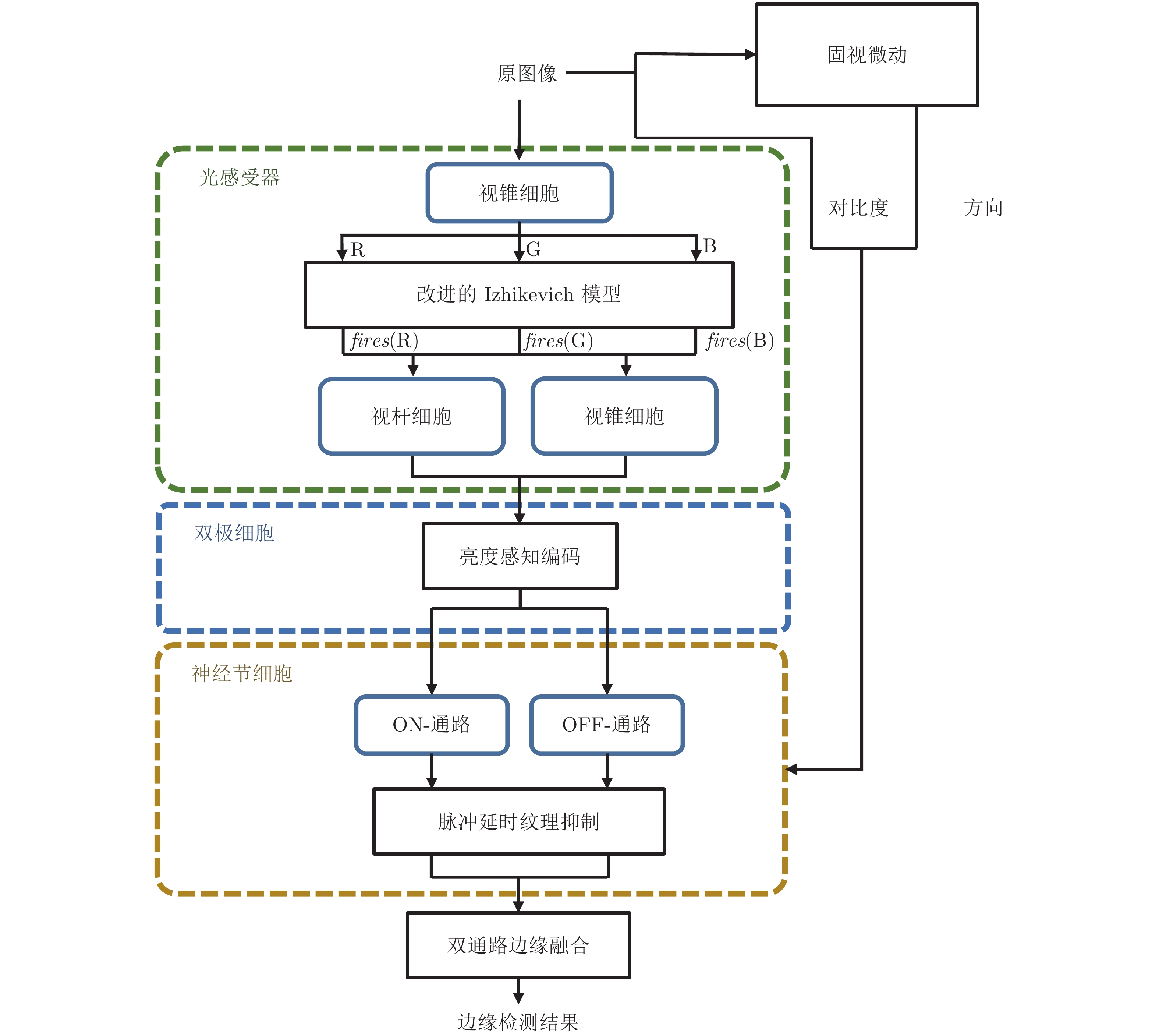
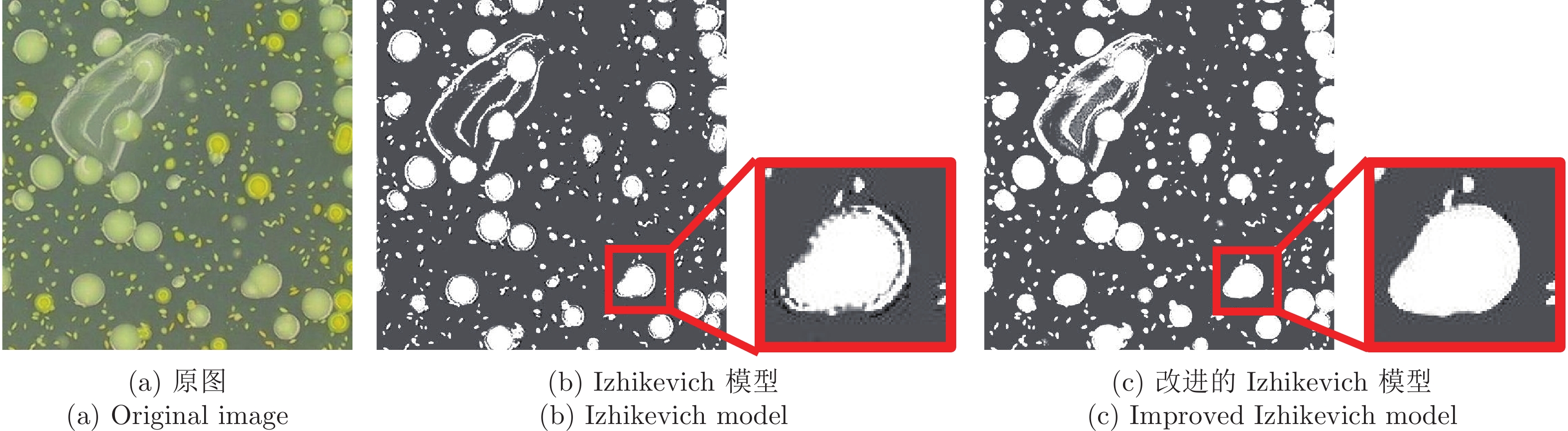
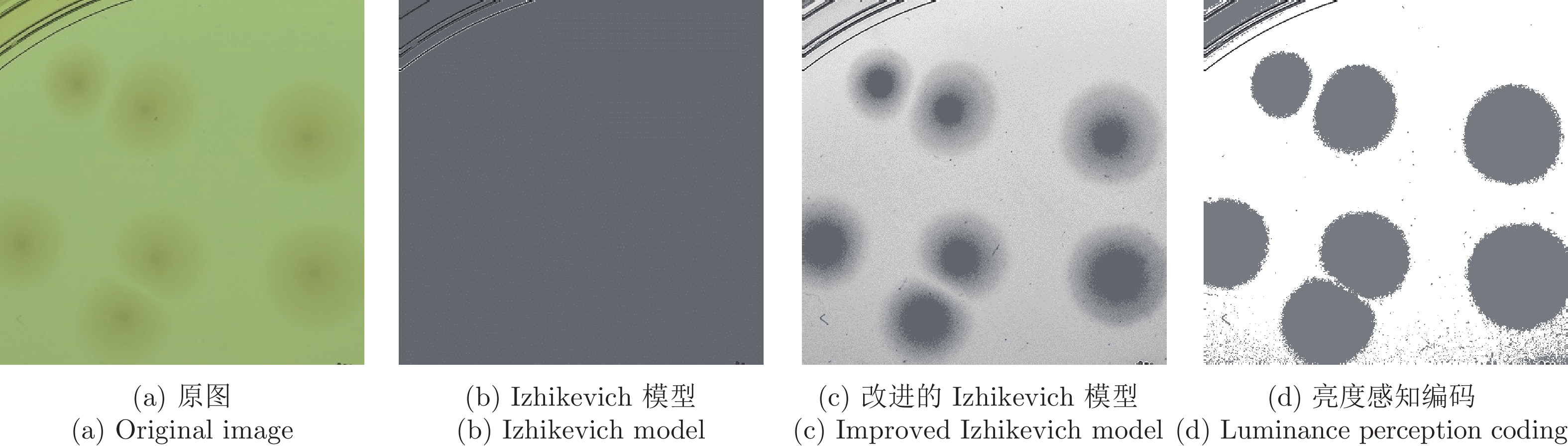
基于视网膜对视觉信息的处理方式, 提出一种视网膜功能启发的边缘检测层级模型. 针对视网膜神经元在周期性光刺激下产生适应的特性, 构建具有自适应阈值的Izhikevich神经元模型; 模拟光感受器中视锥细胞、视杆细胞对亮度的感知能力, 构建亮度感知编码层; 引入双极细胞对给光−撤光刺激的分离能力, 并结合神经节细胞对运动方向敏感的特性, 构建双通路边缘提取层; 另外根据神经节细胞神经元在多特征调控下延迟激活的现象, 构建具有脉冲延时特性的纹理抑制层; 最后将双通路边缘提取的结果与延时抑制量相融合, 得到最终边缘检测结果. 以150张来自实验室采集和AGAR数据集中的菌落图像为实验对象对所提方法进行验证, 检测结果的重建图像相似度、边缘置信度、边缘连续性和综合指标分别达到0.9629、0.3111、0.9159和0.7870, 表明所提方法能更有效地进行边缘定位、抑制冗余纹理、保持主体边缘完整性. 本文面向边缘检测任务, 构建了模拟视网膜对视觉信息处理方式的边缘检测模型, 也为后续构建由视觉机制启发的图像计算模型提供了新思路.
基于视网膜对视觉信息的处理方式, 提出一种视网膜功能启发的边缘检测层级模型. 针对视网膜神经元在周期性光刺激下产生适应的特性, 构建具有自适应阈值的Izhikevich神经元模型; 模拟光感受器中视锥细胞、视杆细胞对亮度的感知能力, 构建亮度感知编码层; 引入双极细胞对给光−撤光刺激的分离能力, 并结合神经节细胞对运动方向敏感的特性, 构建双通路边缘提取层; 另外根据神经节细胞神经元在多特征调控下延迟激活的现象, 构建具有脉冲延时特性的纹理抑制层; 最后将双通路边缘提取的结果与延时抑制量相融合, 得到最终边缘检测结果. 以150张来自实验室采集和AGAR数据集中的菌落图像为实验对象对所提方法进行验证, 检测结果的重建图像相似度、边缘置信度、边缘连续性和综合指标分别达到0.9629、0.3111、0.9159和0.7870, 表明所提方法能更有效地进行边缘定位、抑制冗余纹理、保持主体边缘完整性. 本文面向边缘检测任务, 构建了模拟视网膜对视觉信息处理方式的边缘检测模型, 也为后续构建由视觉机制启发的图像计算模型提供了新思路.




2023, 49(8): 1785-1798.
doi: 10.16383/j.aas.c210311
摘要:
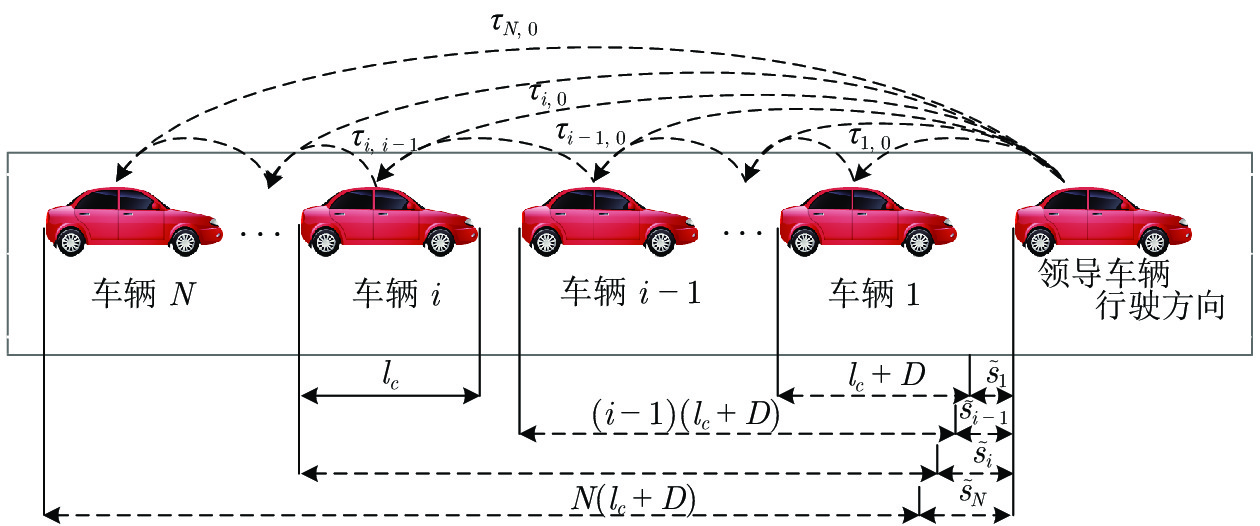
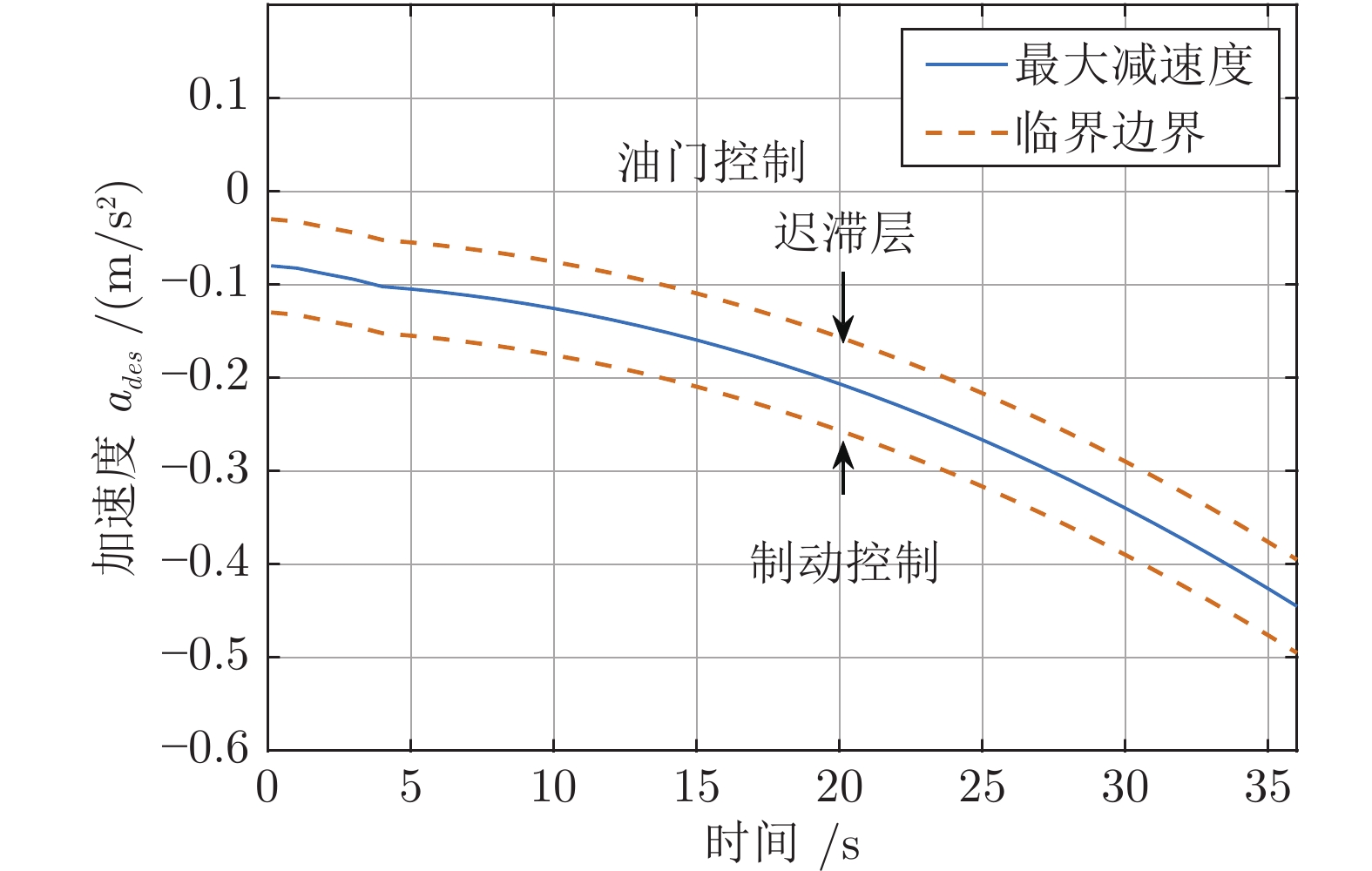
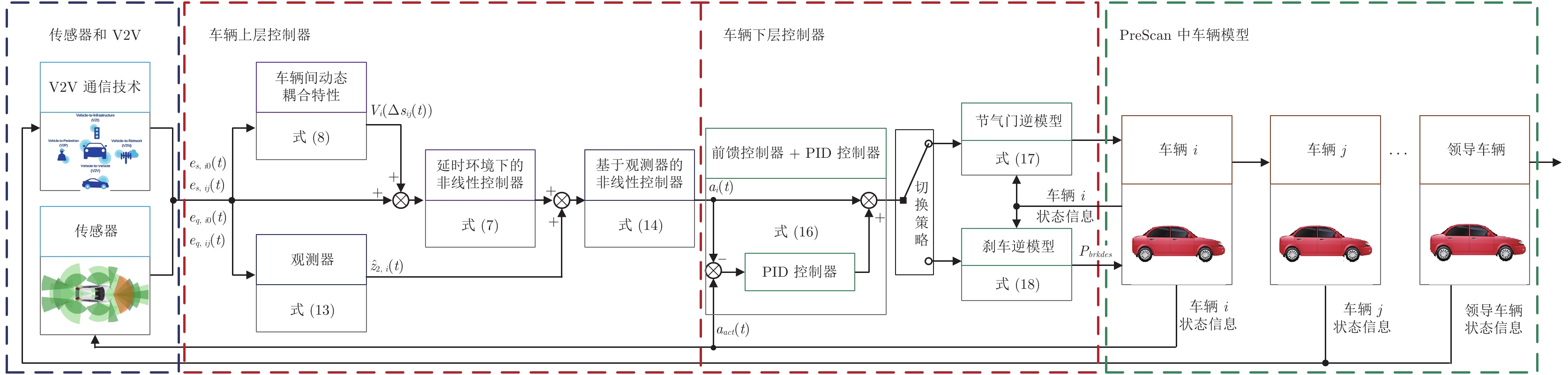
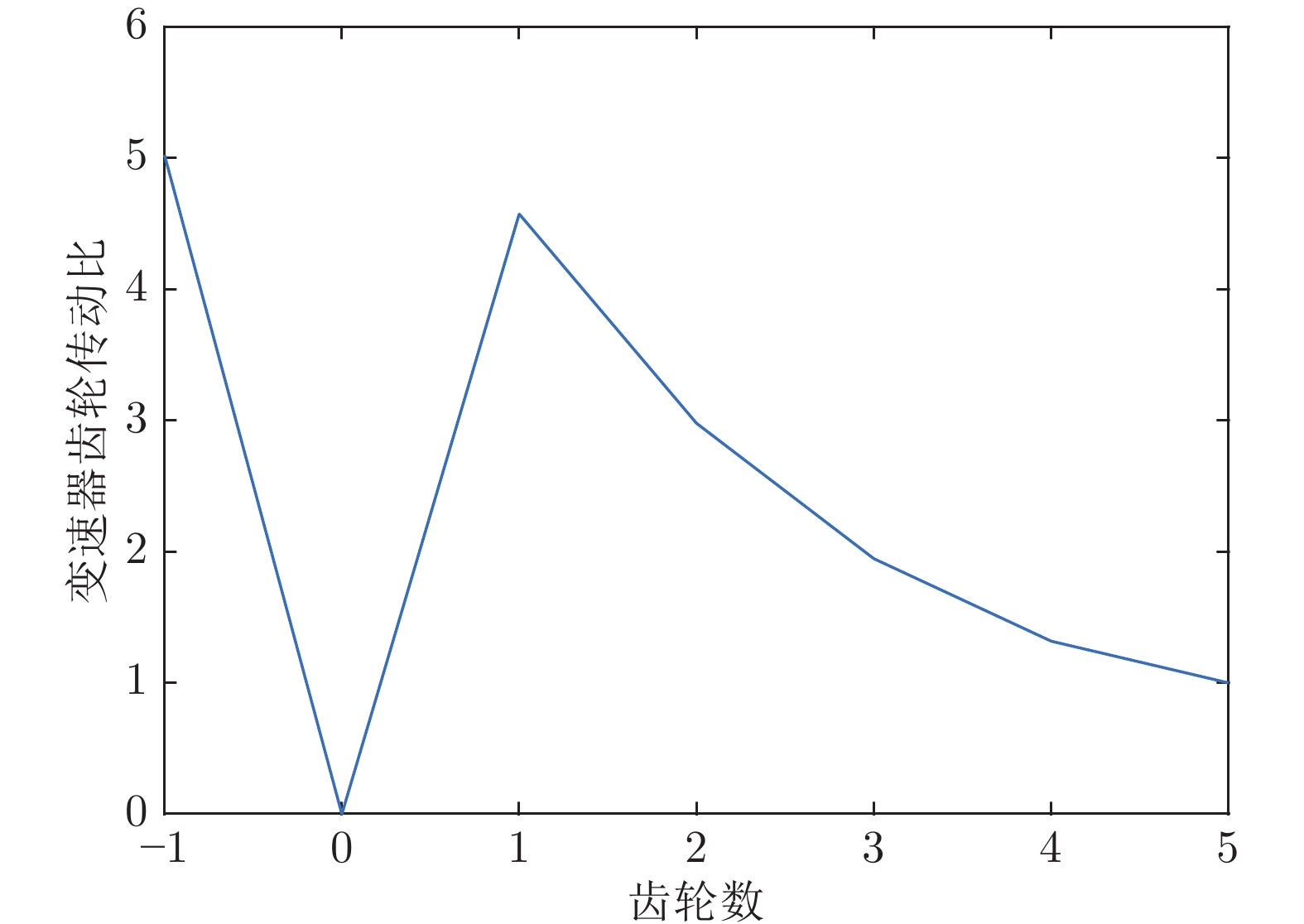
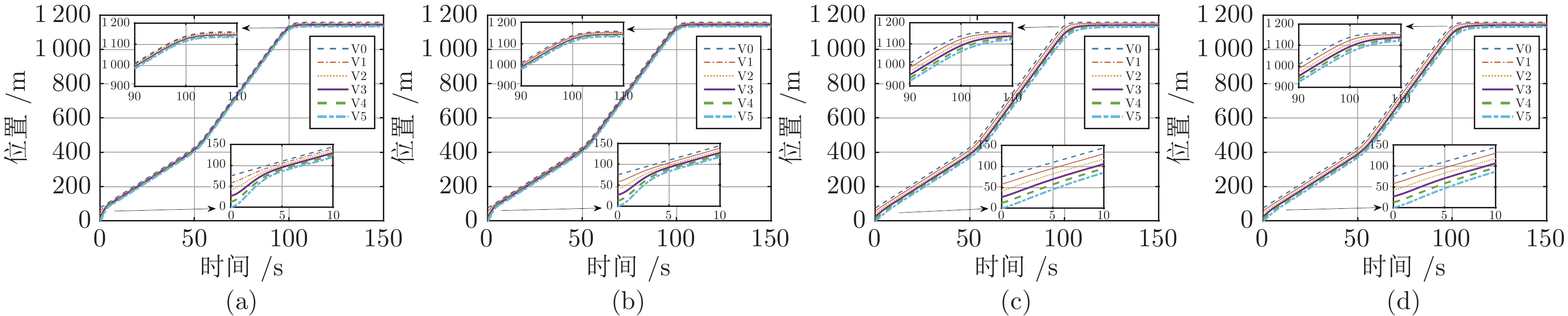
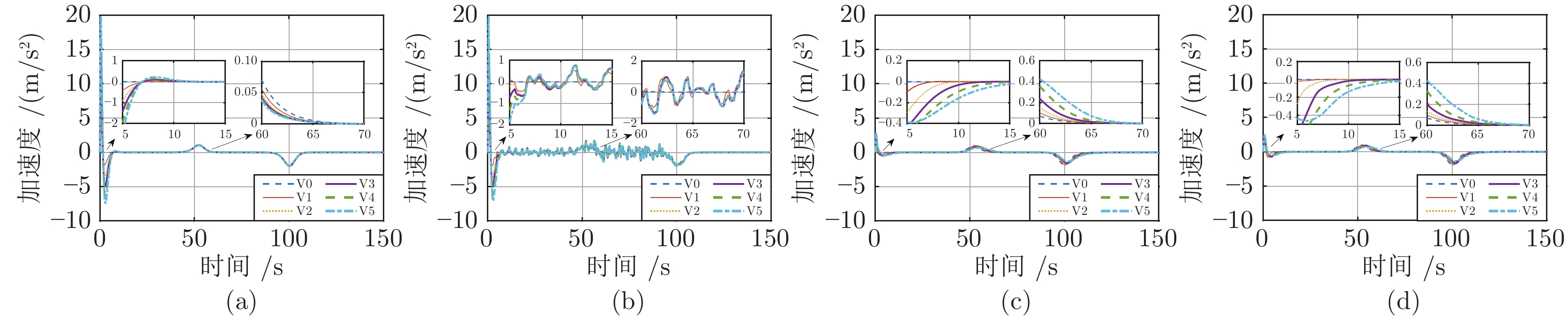
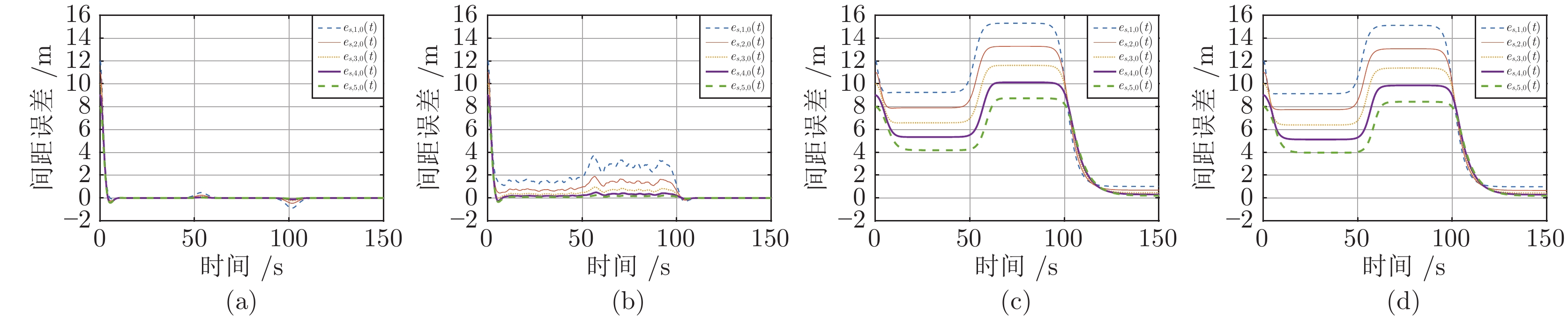
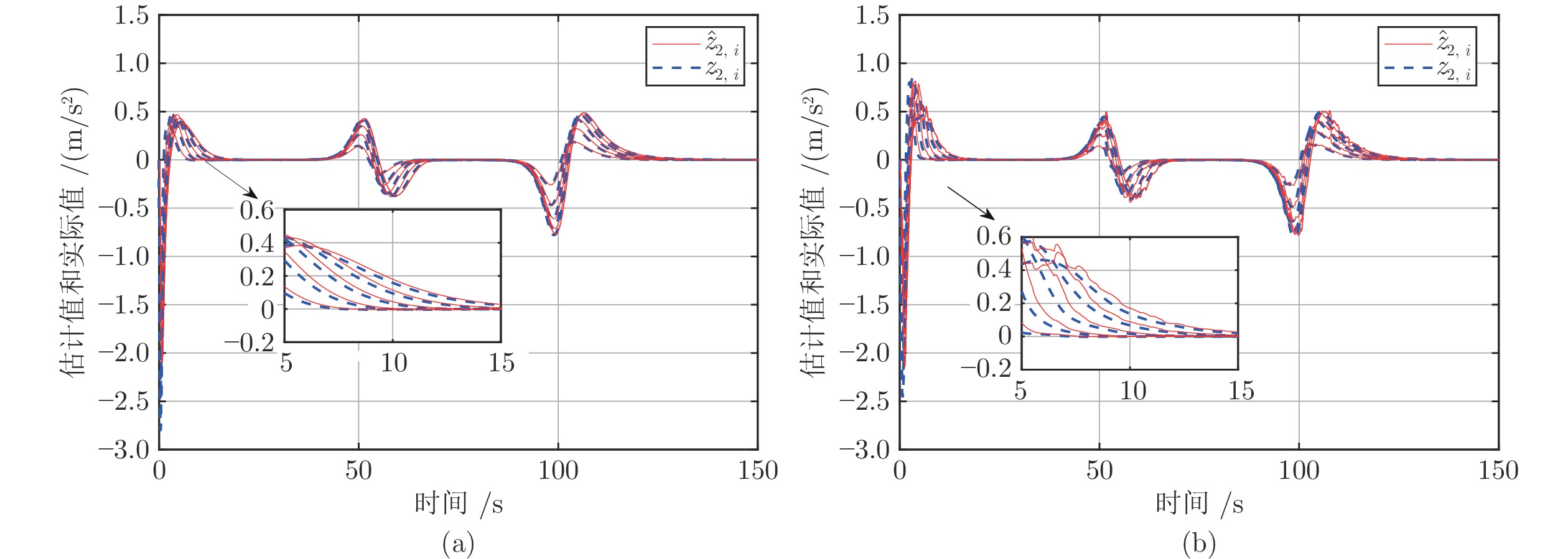
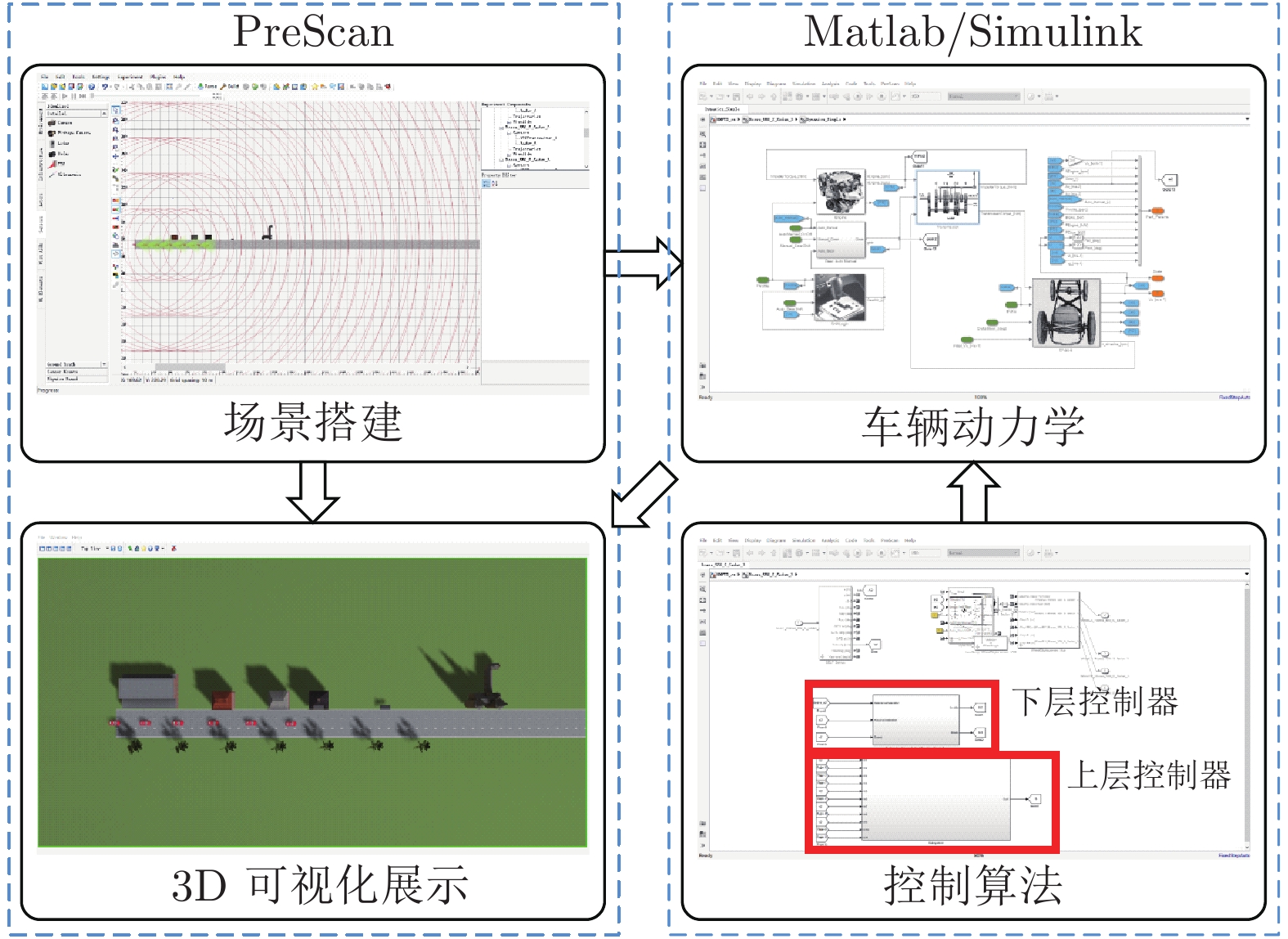
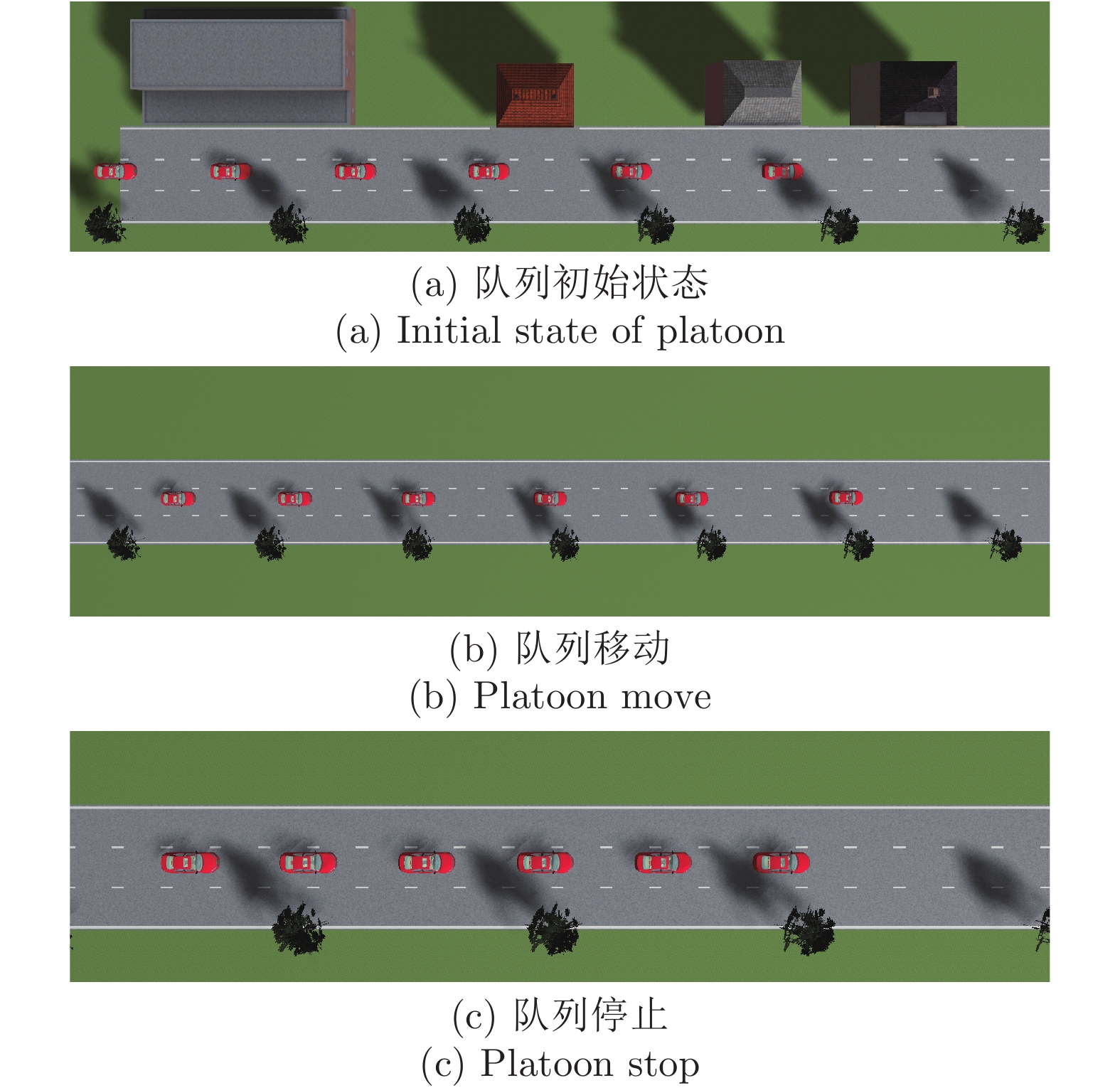
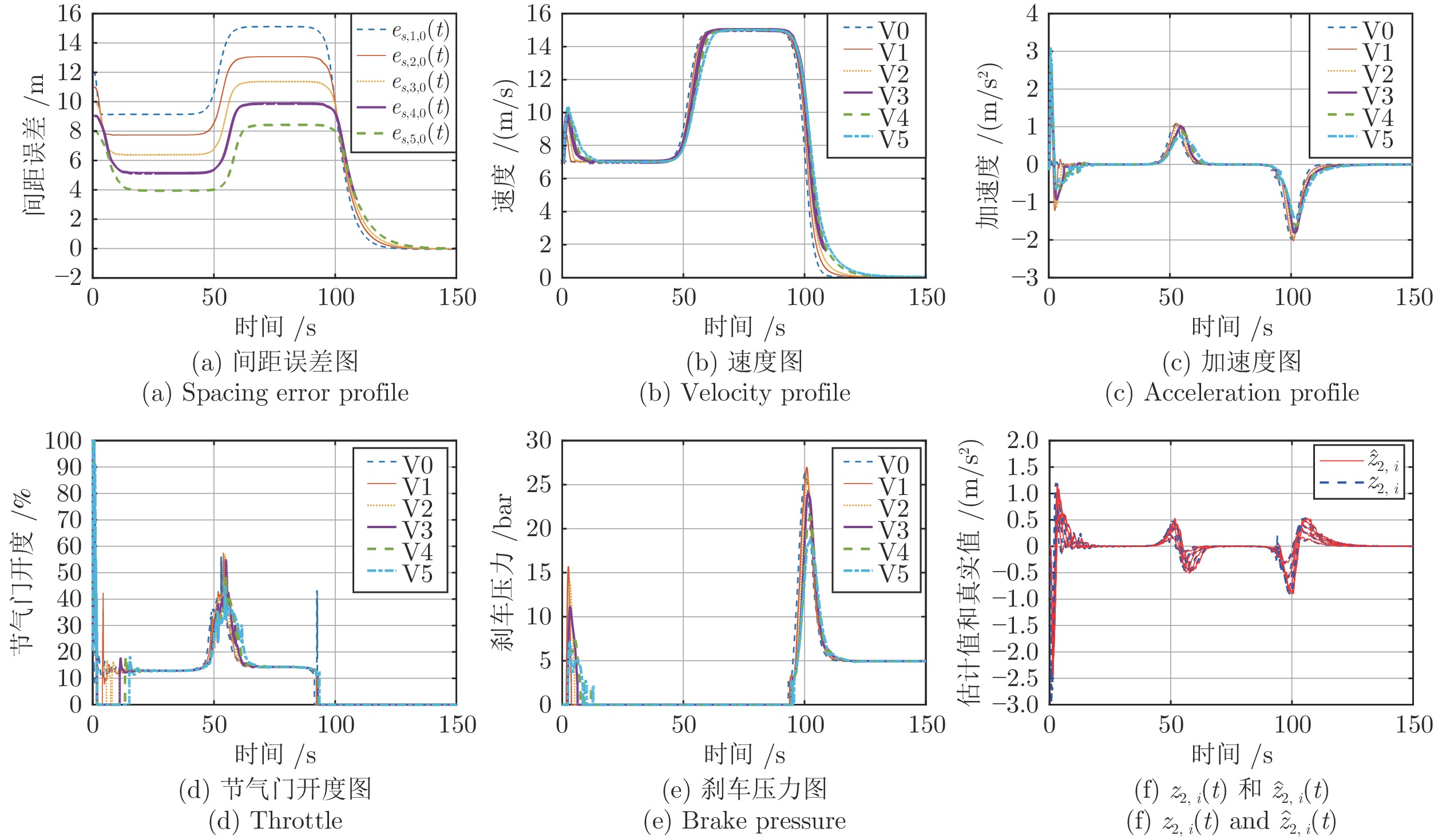
考虑通信延时影响的车辆队列控制问题, 提出一种基于观测器的分布式车辆队列纵向控制器. 首先, 基于分层控制策略分别设计上下层控制器, 通过上层控制器优化期望加速度、下层控制器克服车辆模型非线性实现期望加速度和实际加速度的一致. 上层控制器设计过程中, 基于三阶线性化车辆模型, 考虑观测器、车辆动态耦合特性和通信延时, 提出一种通信延时环境下基于观测器的车辆队列控制器, 利用观测器估计领导车辆加速度信息从而减轻通信负担. 然后, 利用Lyapunov-Krasovskii方法分析车辆队列的稳定性, 并得出通信延时上界, 同时利用传递函数方法分析了串稳定性. 最后, 通过数值仿真验证上层控制器的有效性和稳定性. 在此基础上, 利用PreScan软件中高保真车辆动态模型, 验证了该分层控制策略的有效性.
考虑通信延时影响的车辆队列控制问题, 提出一种基于观测器的分布式车辆队列纵向控制器. 首先, 基于分层控制策略分别设计上下层控制器, 通过上层控制器优化期望加速度、下层控制器克服车辆模型非线性实现期望加速度和实际加速度的一致. 上层控制器设计过程中, 基于三阶线性化车辆模型, 考虑观测器、车辆动态耦合特性和通信延时, 提出一种通信延时环境下基于观测器的车辆队列控制器, 利用观测器估计领导车辆加速度信息从而减轻通信负担. 然后, 利用Lyapunov-Krasovskii方法分析车辆队列的稳定性, 并得出通信延时上界, 同时利用传递函数方法分析了串稳定性. 最后, 通过数值仿真验证上层控制器的有效性和稳定性. 在此基础上, 利用PreScan软件中高保真车辆动态模型, 验证了该分层控制策略的有效性.

2023, 49(8): 1799-1812.
doi: 10.16383/j.aas.c210375
摘要:
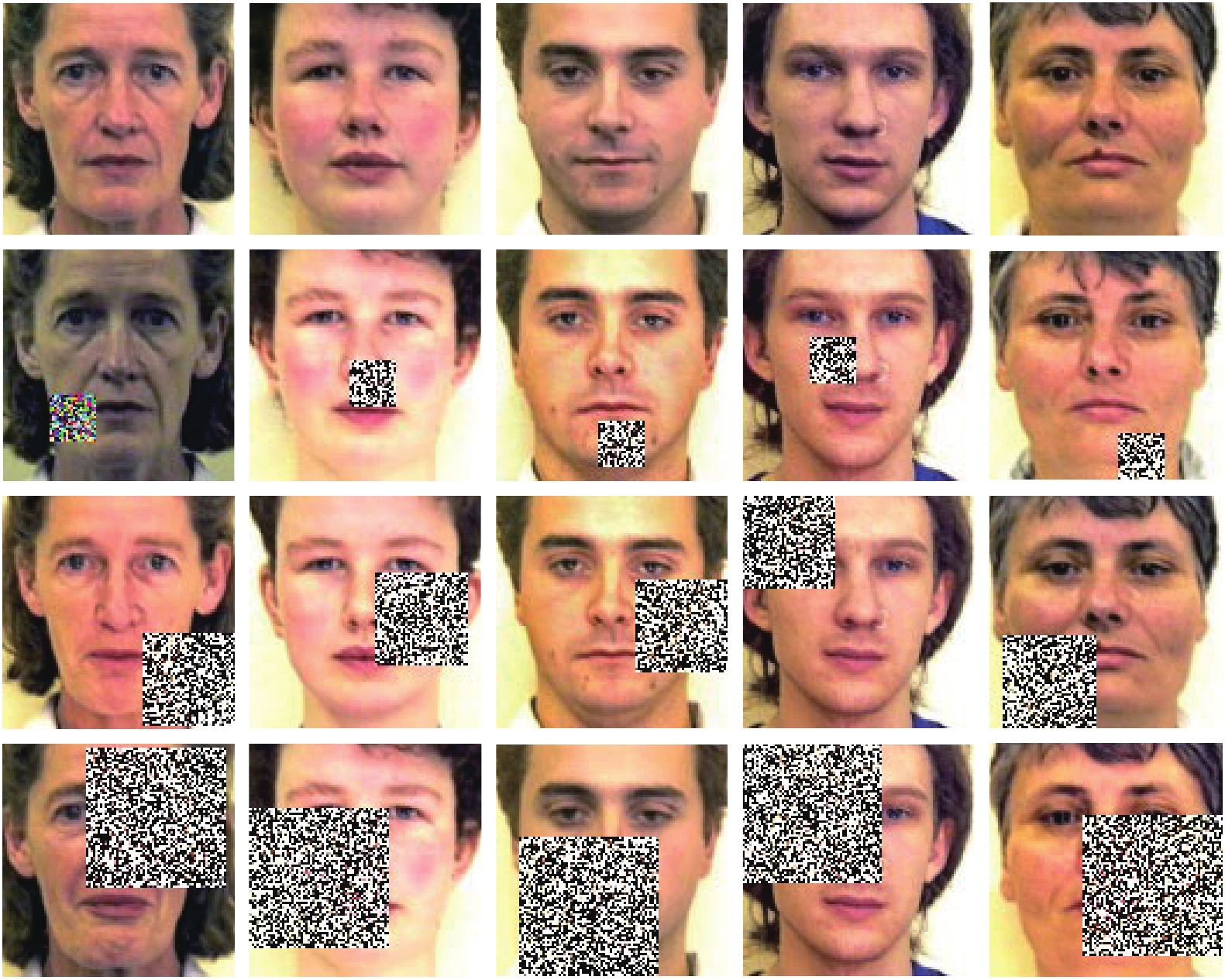
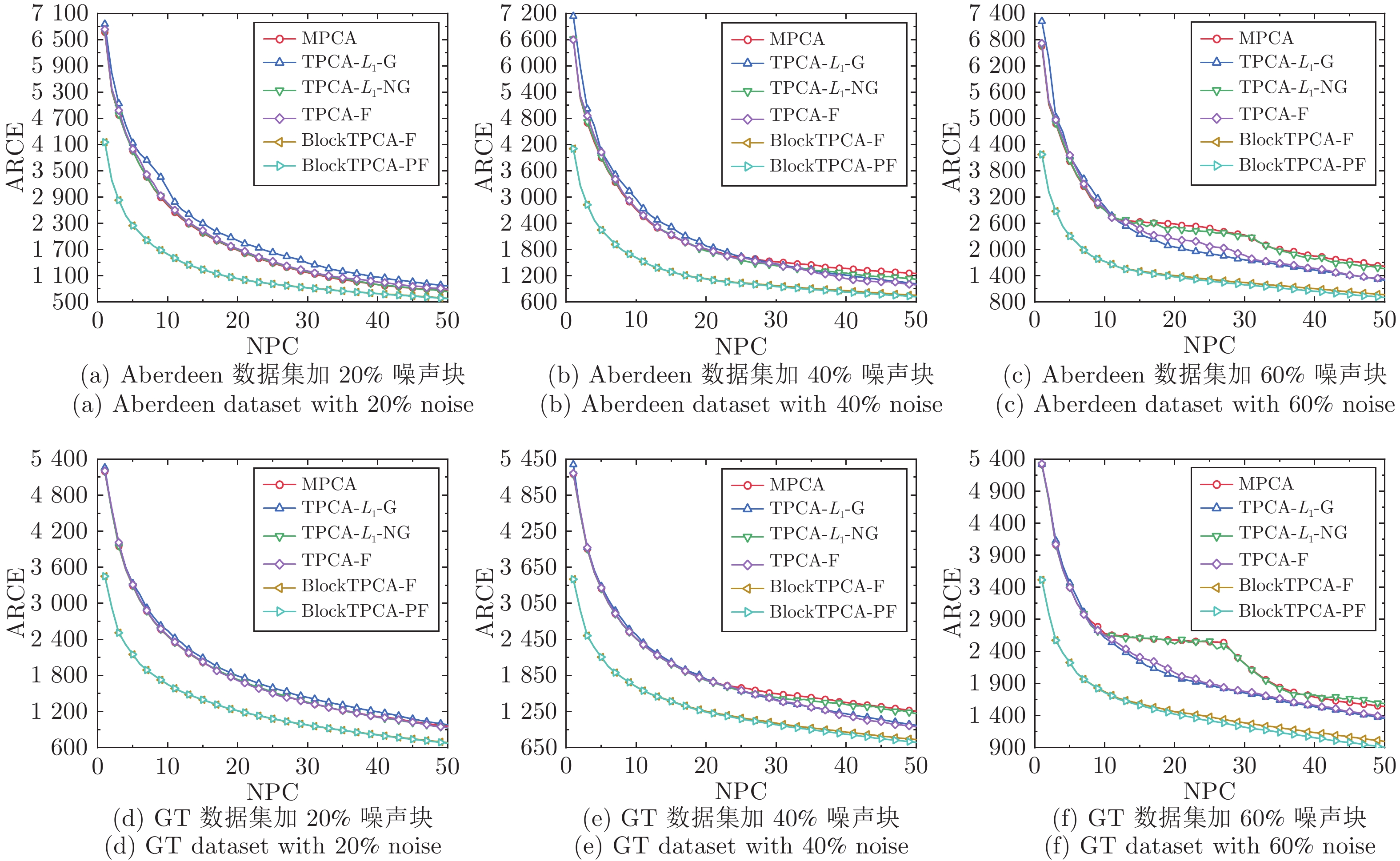
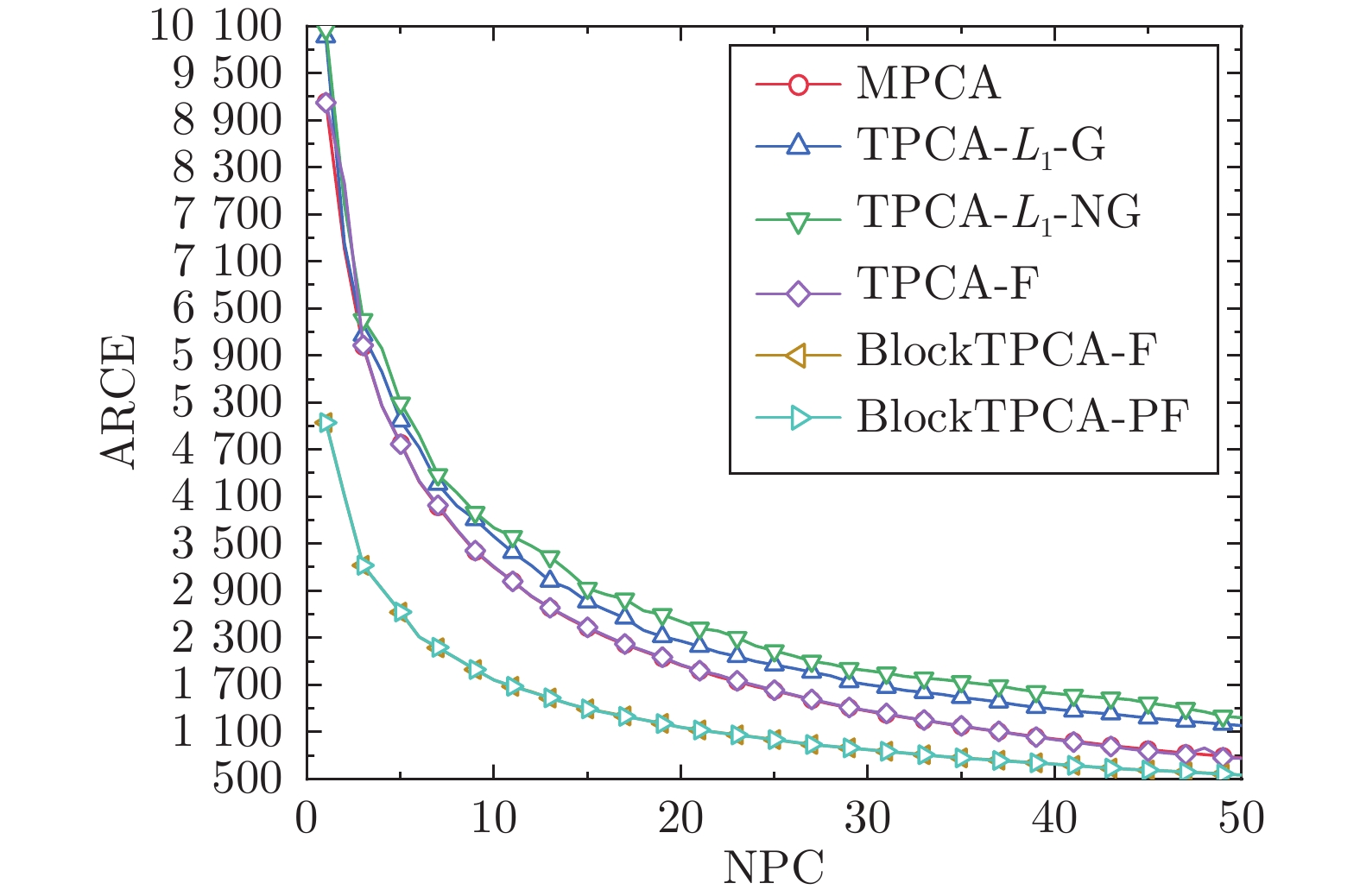
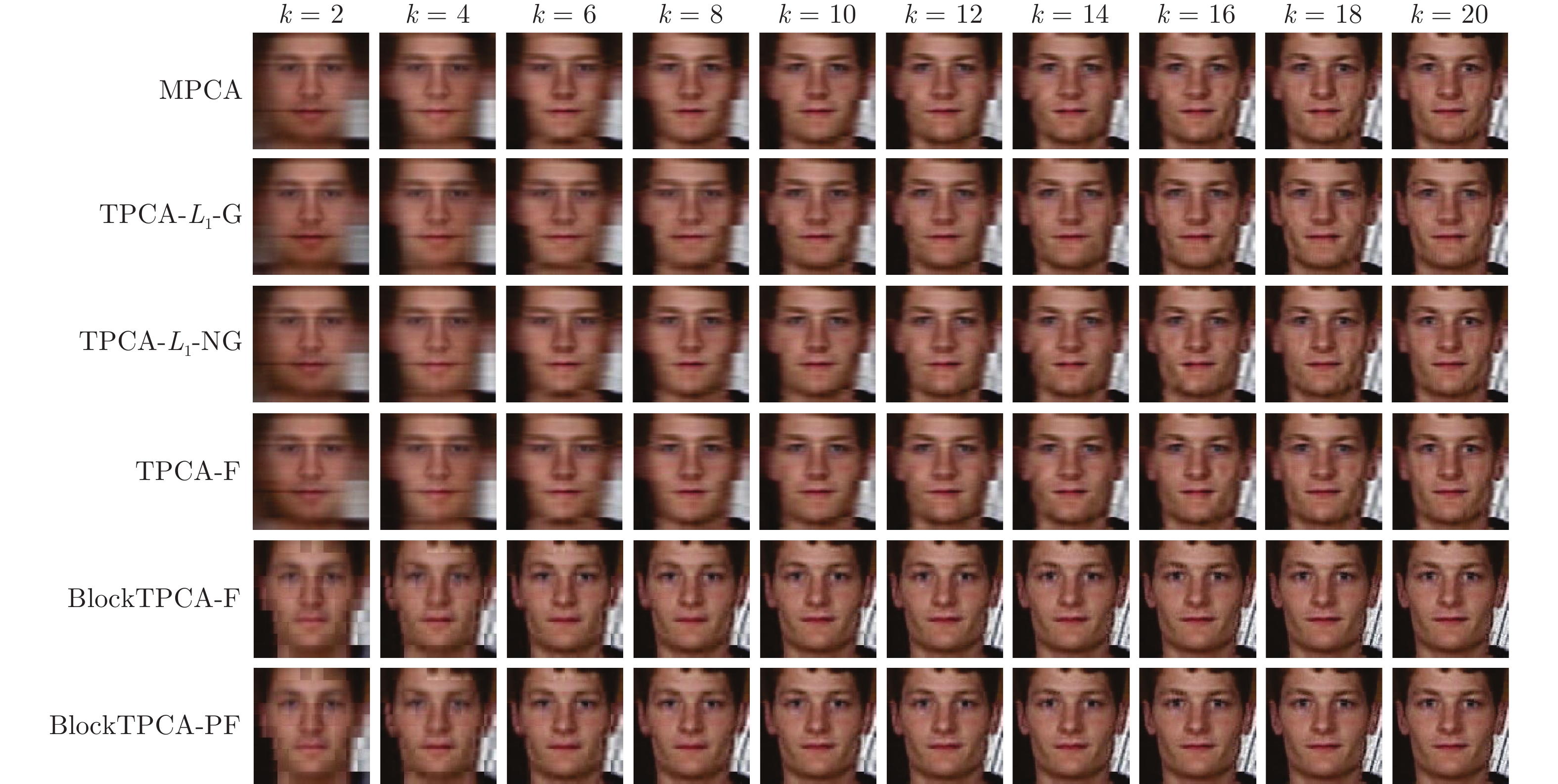
张量主成分分析(Tensor principal component analysis, TPCA)在彩色图像低维表征领域得到广泛深入研究, 采用\begin{document}${\rm{F}}$\end{document} \begin{document}${L}_{1}$\end{document} \begin{document}${\rm{F}}$\end{document} \begin{document}$\rm{F}$\end{document} \begin{document}$\rm{F}$\end{document}-norm, \begin{document}$\rm{F}$\end{document}
张量主成分分析(Tensor principal component analysis, TPCA)在彩色图像低维表征领域得到广泛深入研究, 采用