2023年 第49卷 第1期
2023, 49(1): 1-14.
doi: 10.16383/j.aas.c210352
摘要:
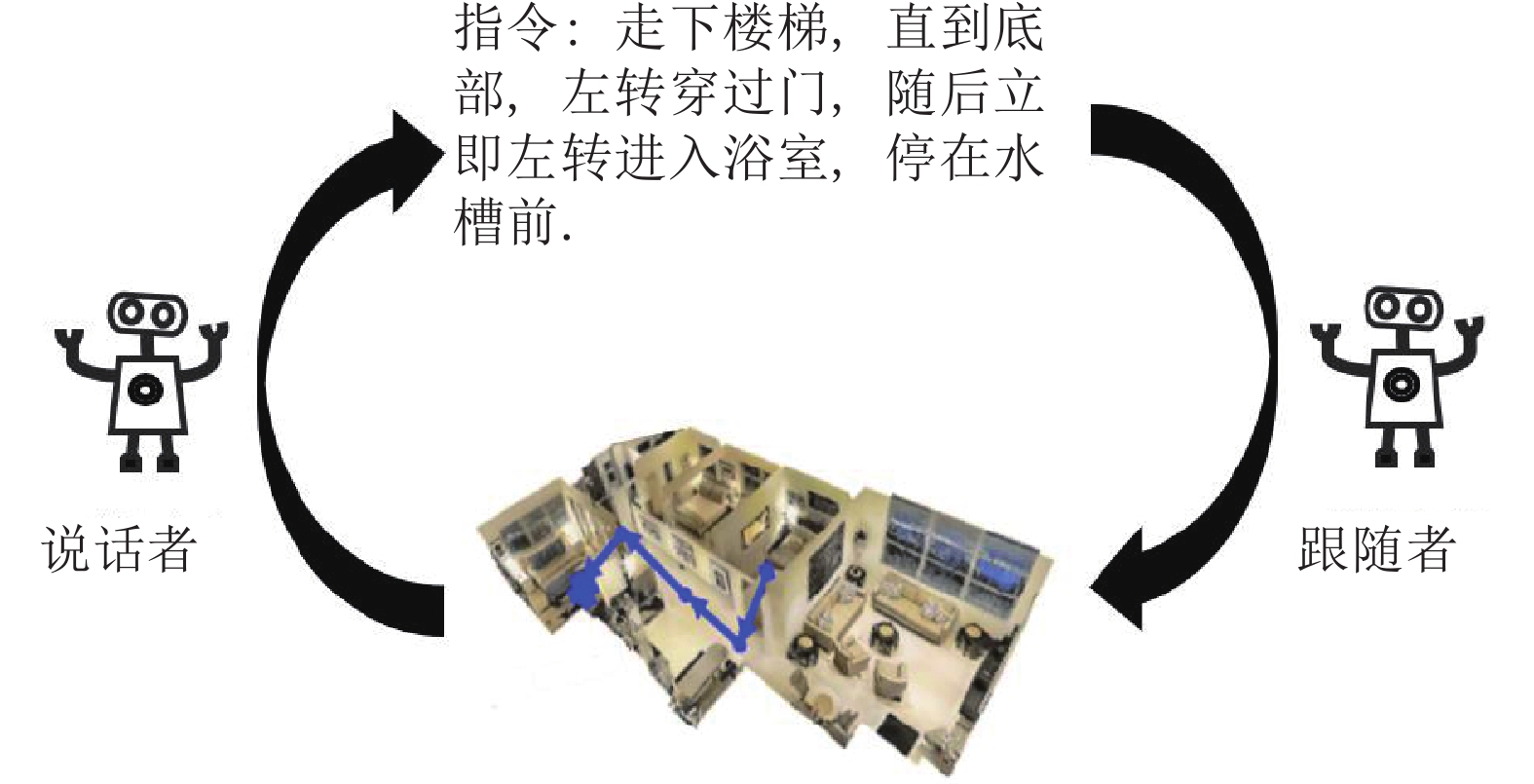
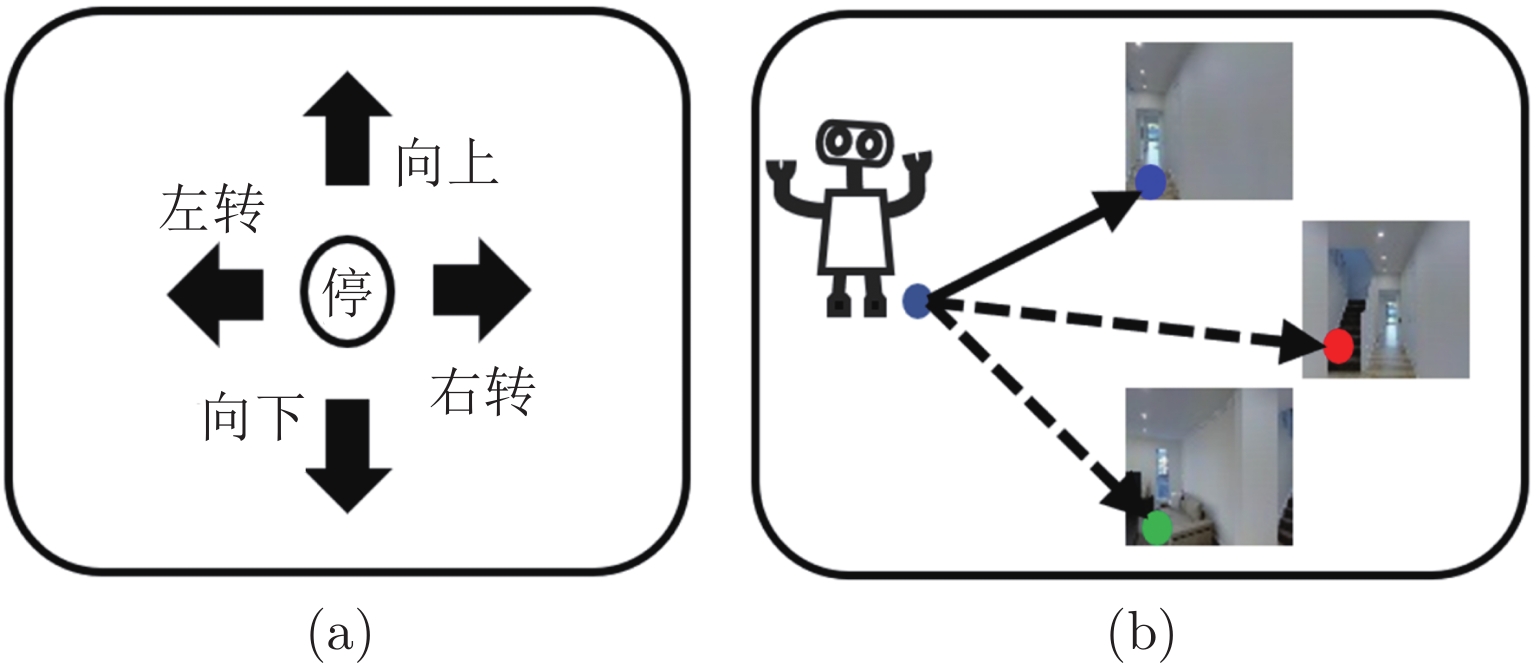
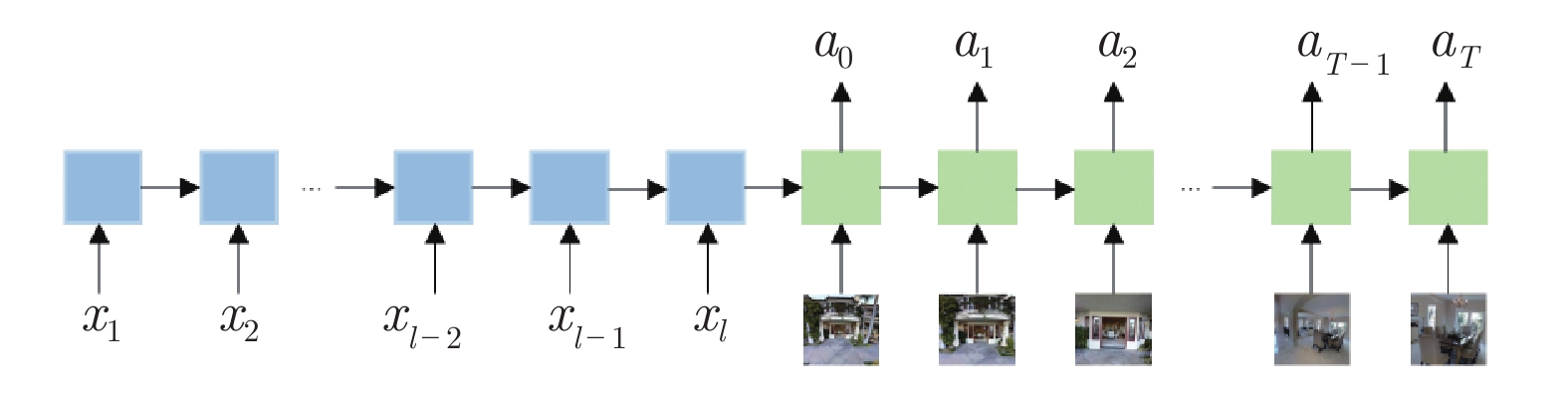
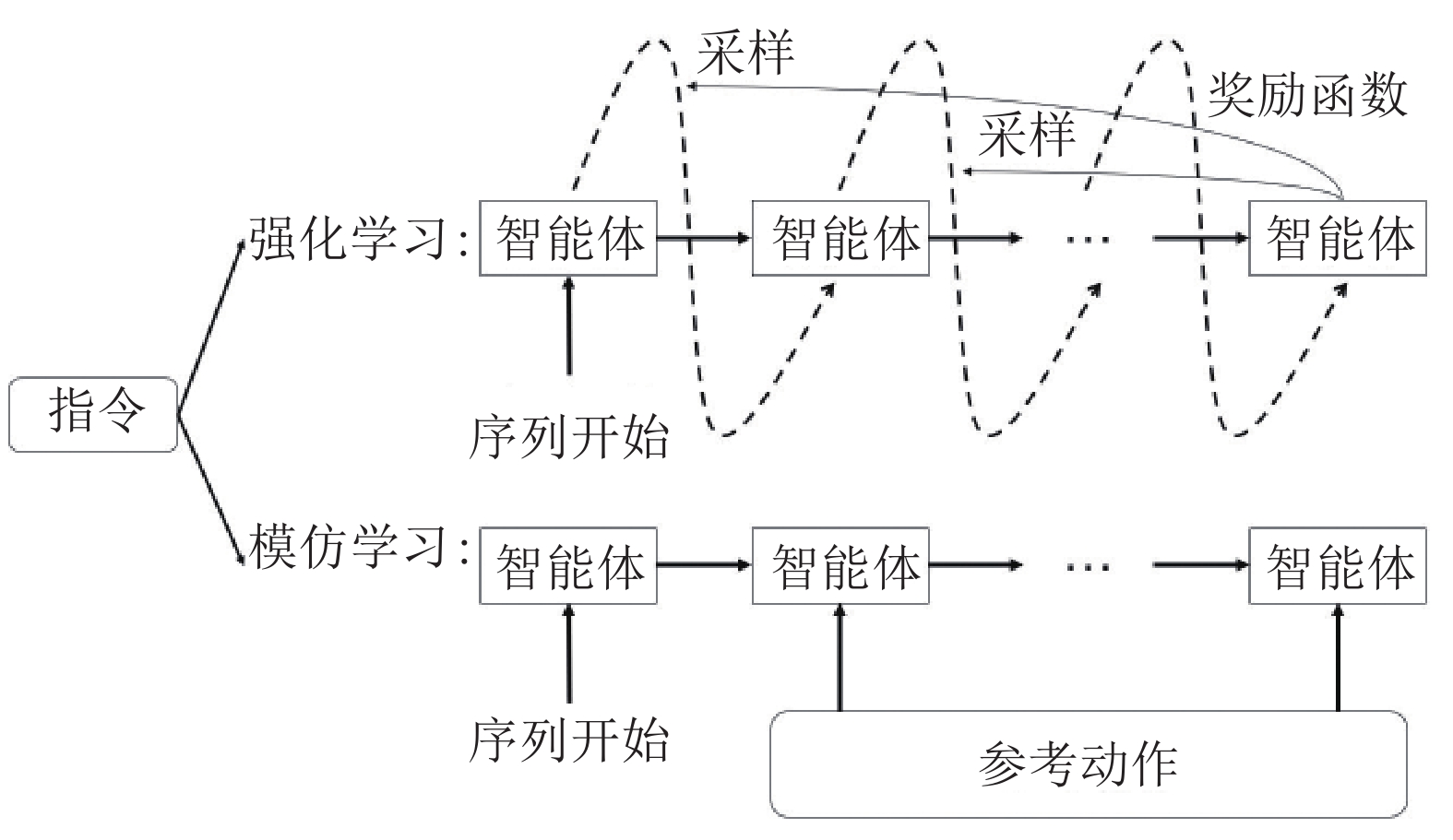
视觉语言导航, 即在一个未知环境中, 智能体从一个起始位置出发, 结合指令和周围视觉环境进行分析, 并动态响应生成一系列动作, 最终导航到目标位置. 视觉语言导航有着广泛的应用前景, 该任务近年来在多模态研究领域受到了广泛关注. 不同于视觉问答和图像描述生成等传统多模态任务, 视觉语言导航在多模态融合和推理方面, 更具有挑战性. 然而由于传统模仿学习的缺陷和数据稀缺的现象, 模型面临着泛化能力不足的问题. 系统地回顾了视觉语言导航的研究进展, 首先对于视觉语言导航的数据集和基础模型进行简要介绍; 然后全面地介绍视觉语言导航任务中的代表性模型方法, 包括数据增强、搜索策略、训练方法和动作空间四个方面; 最后根据不同数据集下的实验, 分析比较模型的优势和不足, 并对未来可能的研究方向进行了展望.
视觉语言导航, 即在一个未知环境中, 智能体从一个起始位置出发, 结合指令和周围视觉环境进行分析, 并动态响应生成一系列动作, 最终导航到目标位置. 视觉语言导航有着广泛的应用前景, 该任务近年来在多模态研究领域受到了广泛关注. 不同于视觉问答和图像描述生成等传统多模态任务, 视觉语言导航在多模态融合和推理方面, 更具有挑战性. 然而由于传统模仿学习的缺陷和数据稀缺的现象, 模型面临着泛化能力不足的问题. 系统地回顾了视觉语言导航的研究进展, 首先对于视觉语言导航的数据集和基础模型进行简要介绍; 然后全面地介绍视觉语言导航任务中的代表性模型方法, 包括数据增强、搜索策略、训练方法和动作空间四个方面; 最后根据不同数据集下的实验, 分析比较模型的优势和不足, 并对未来可能的研究方向进行了展望.


2023, 49(1): 15-39.
doi: 10.16383/j.aas.c220421
摘要:
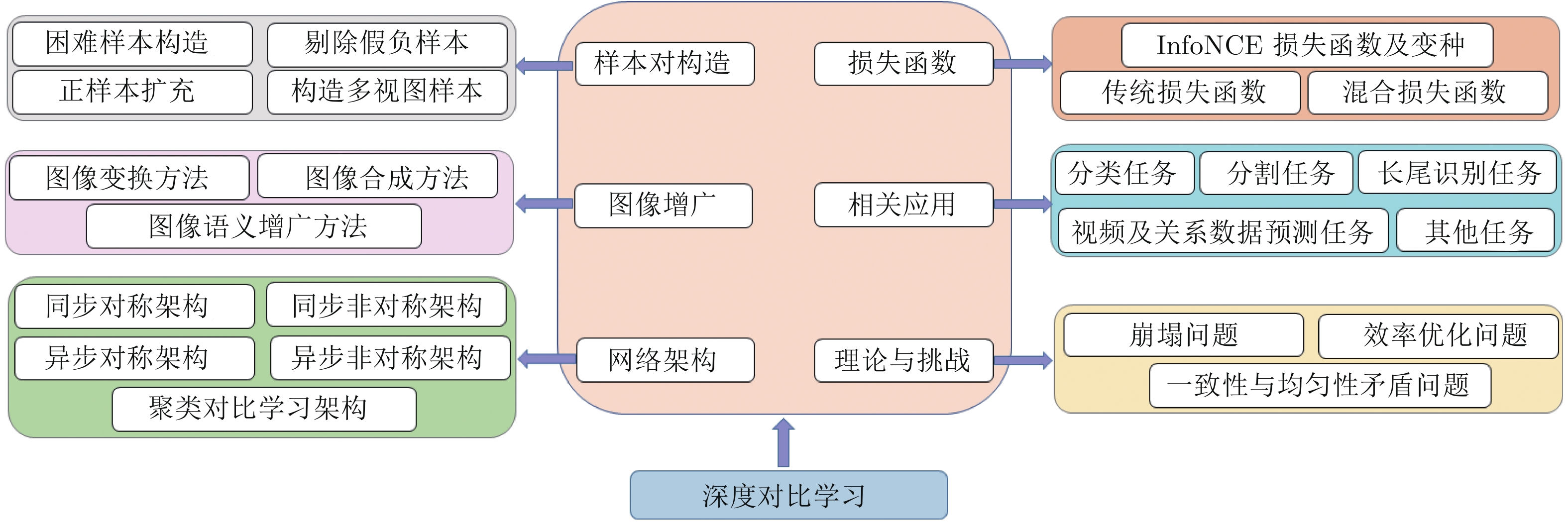
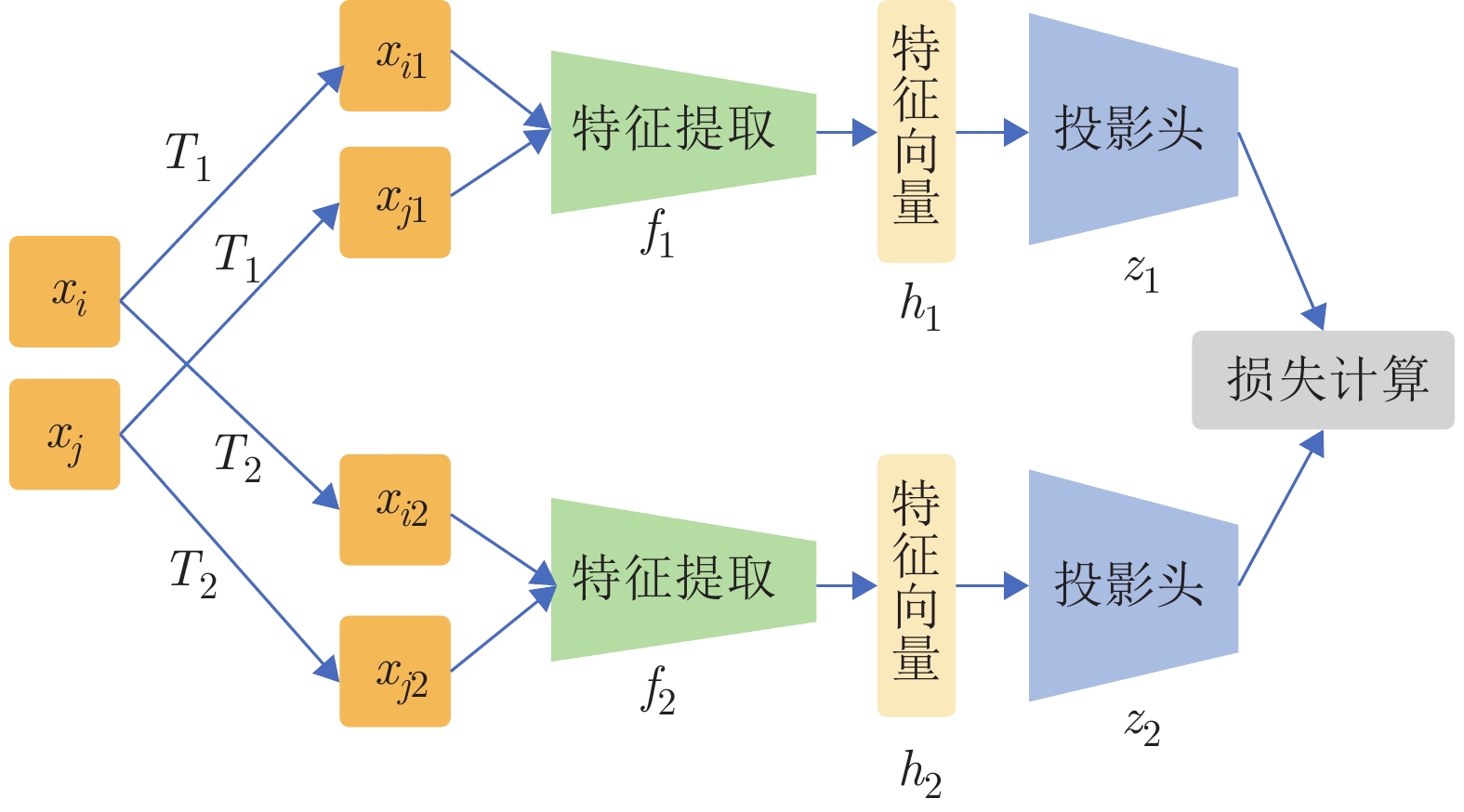
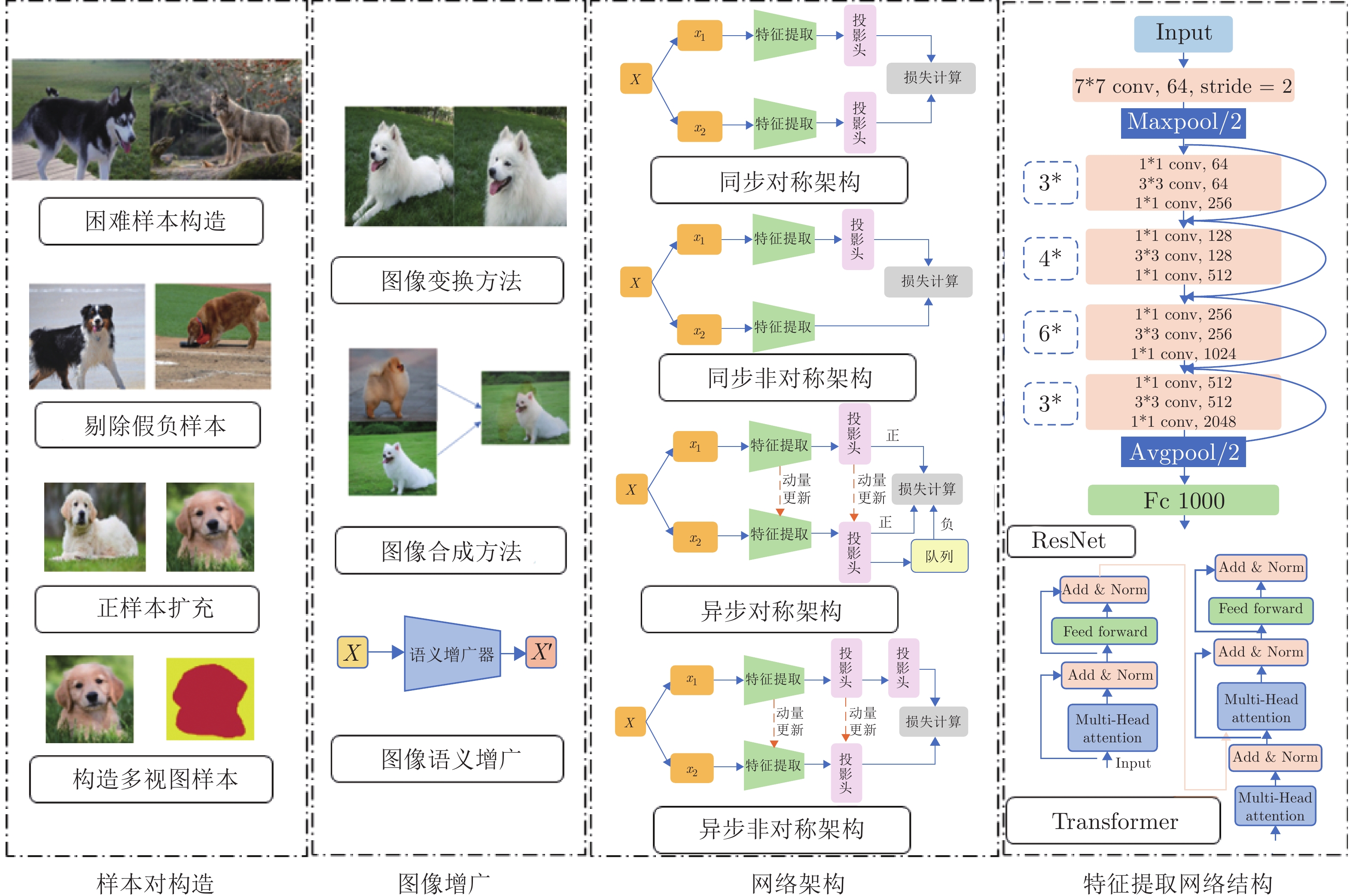
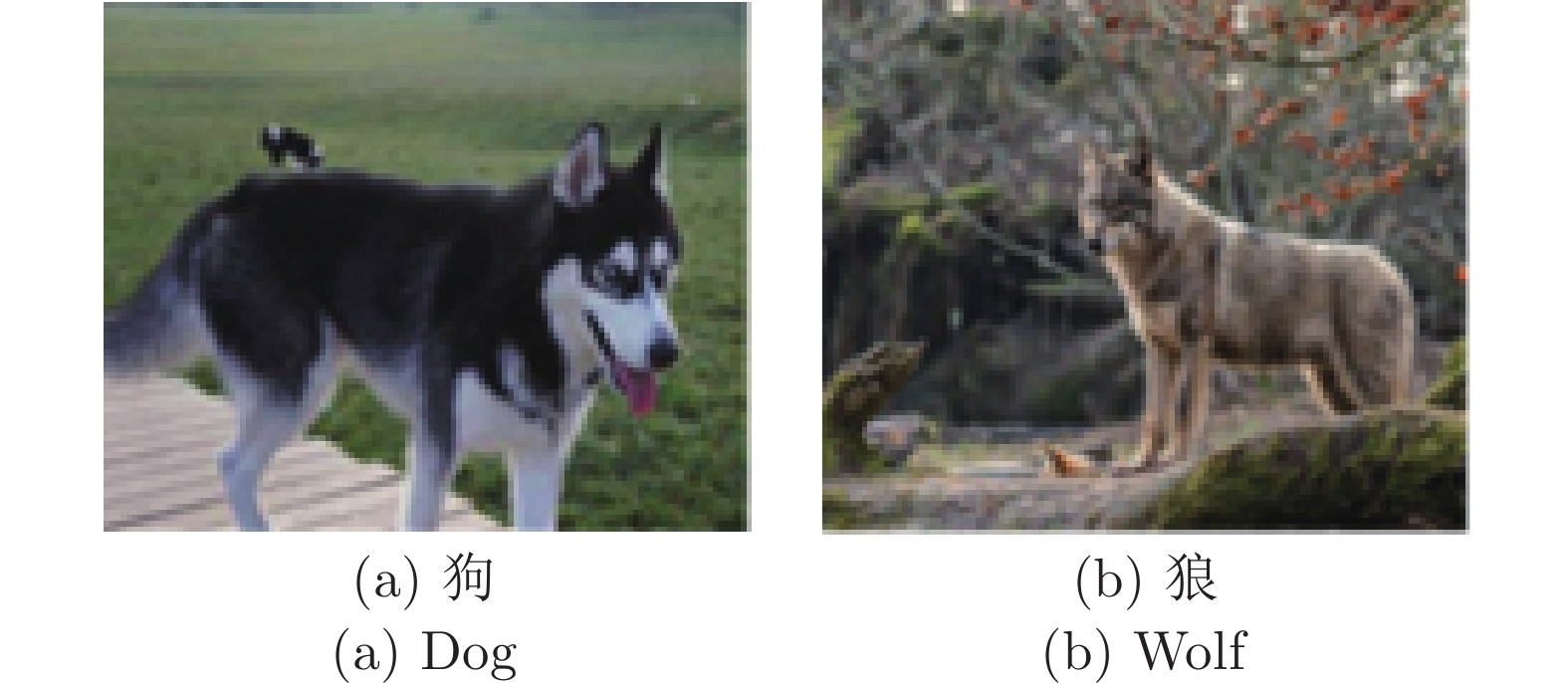
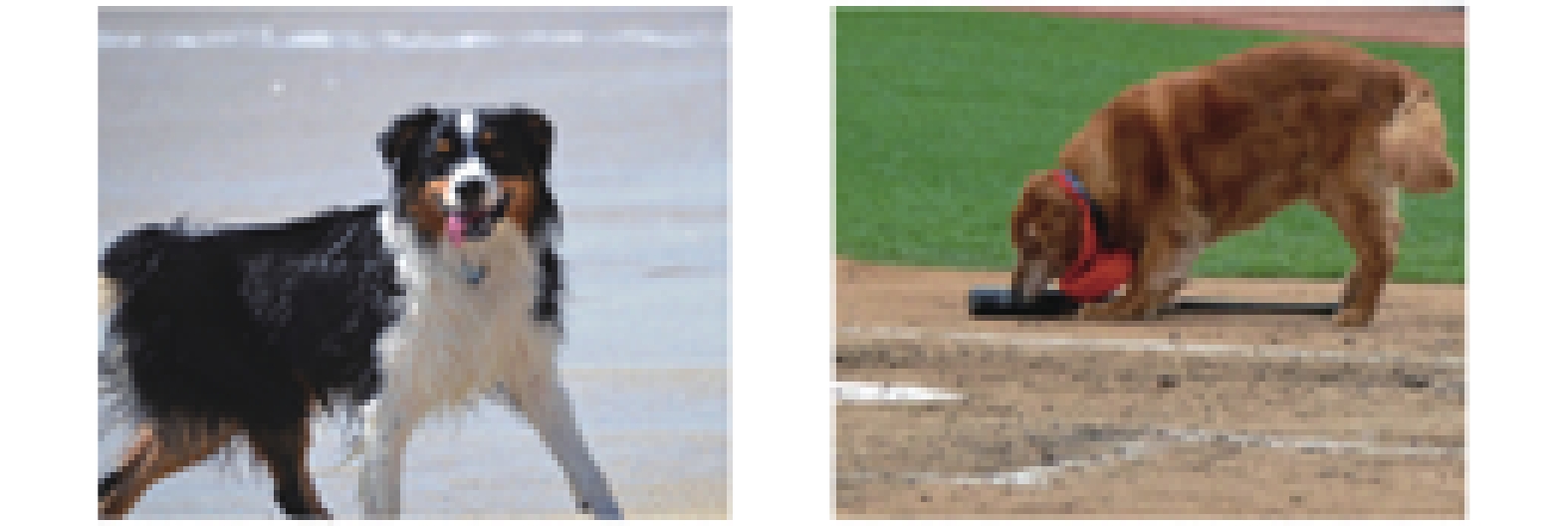
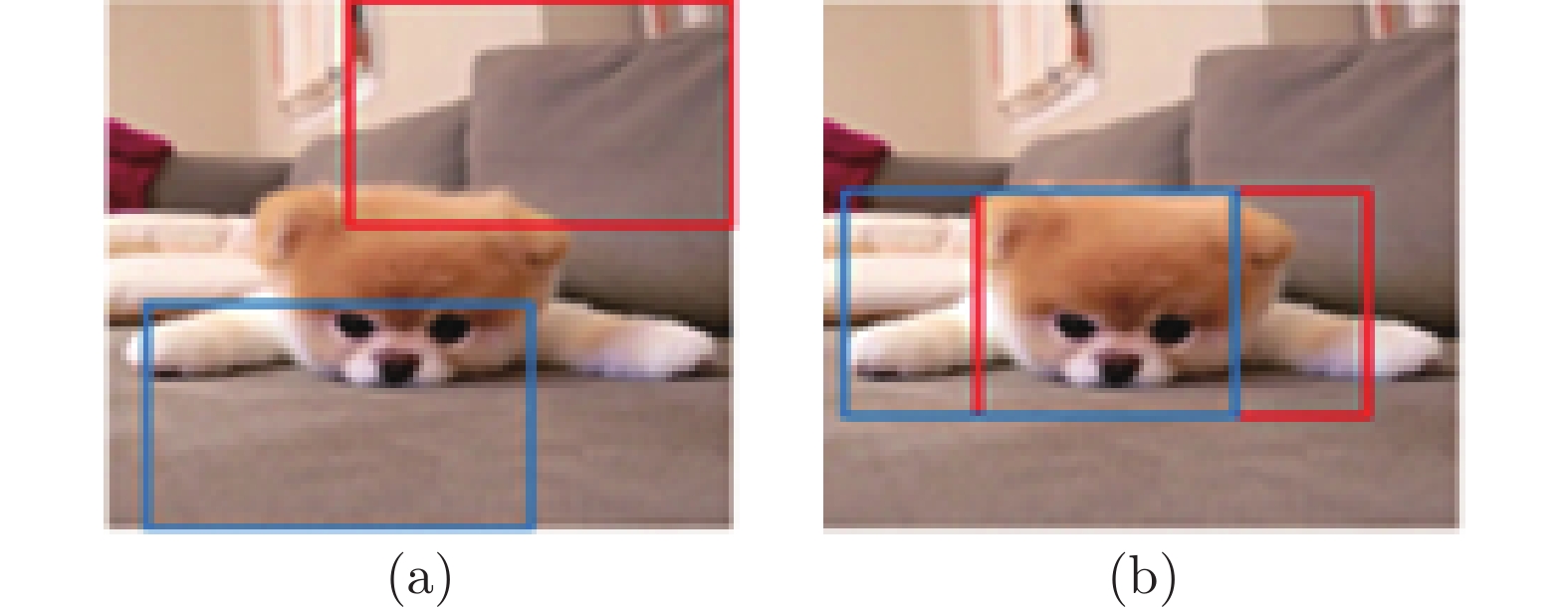
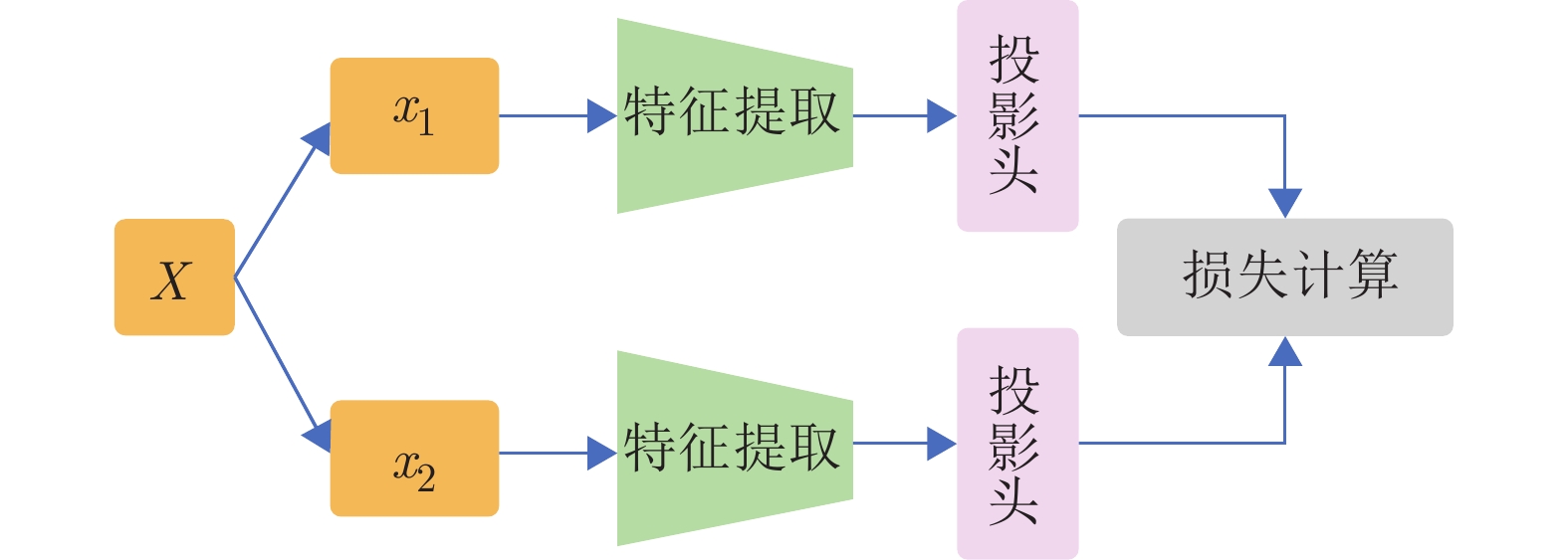
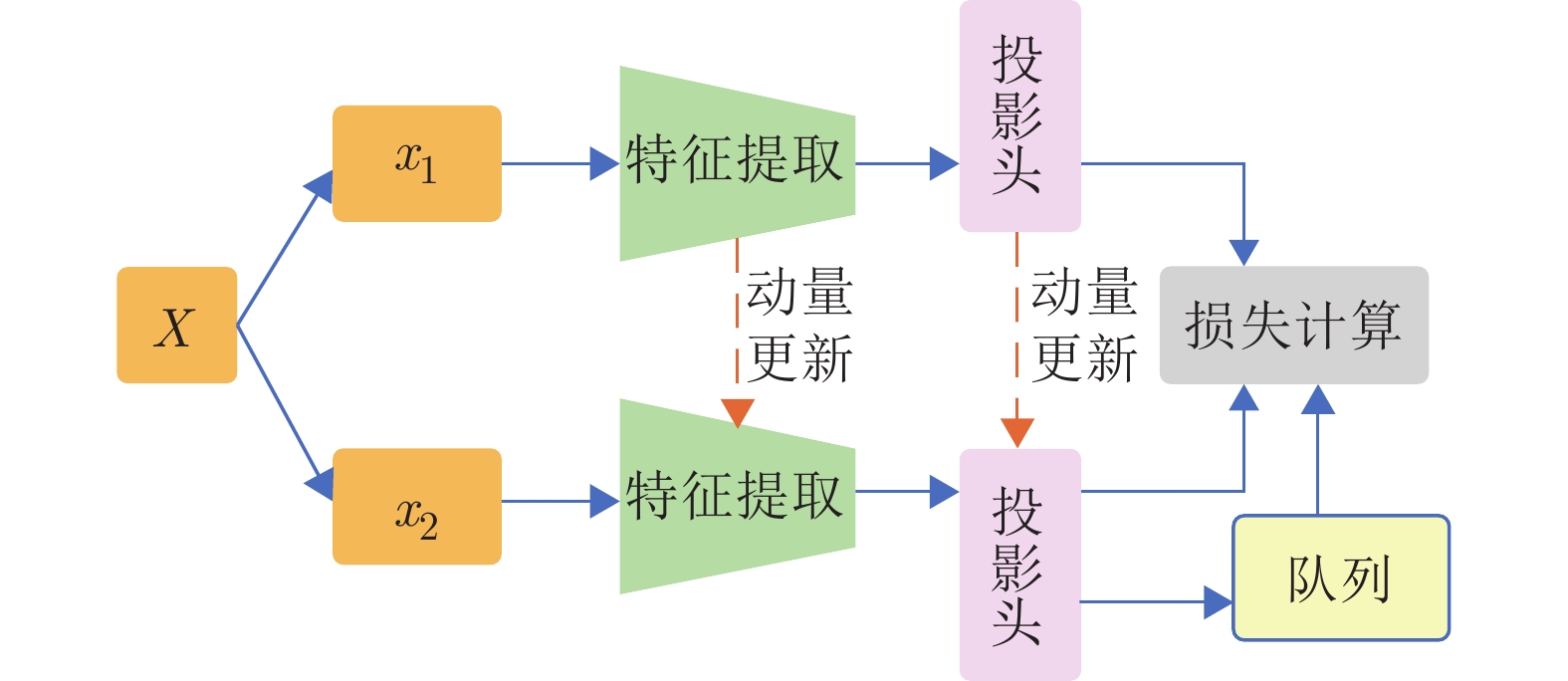
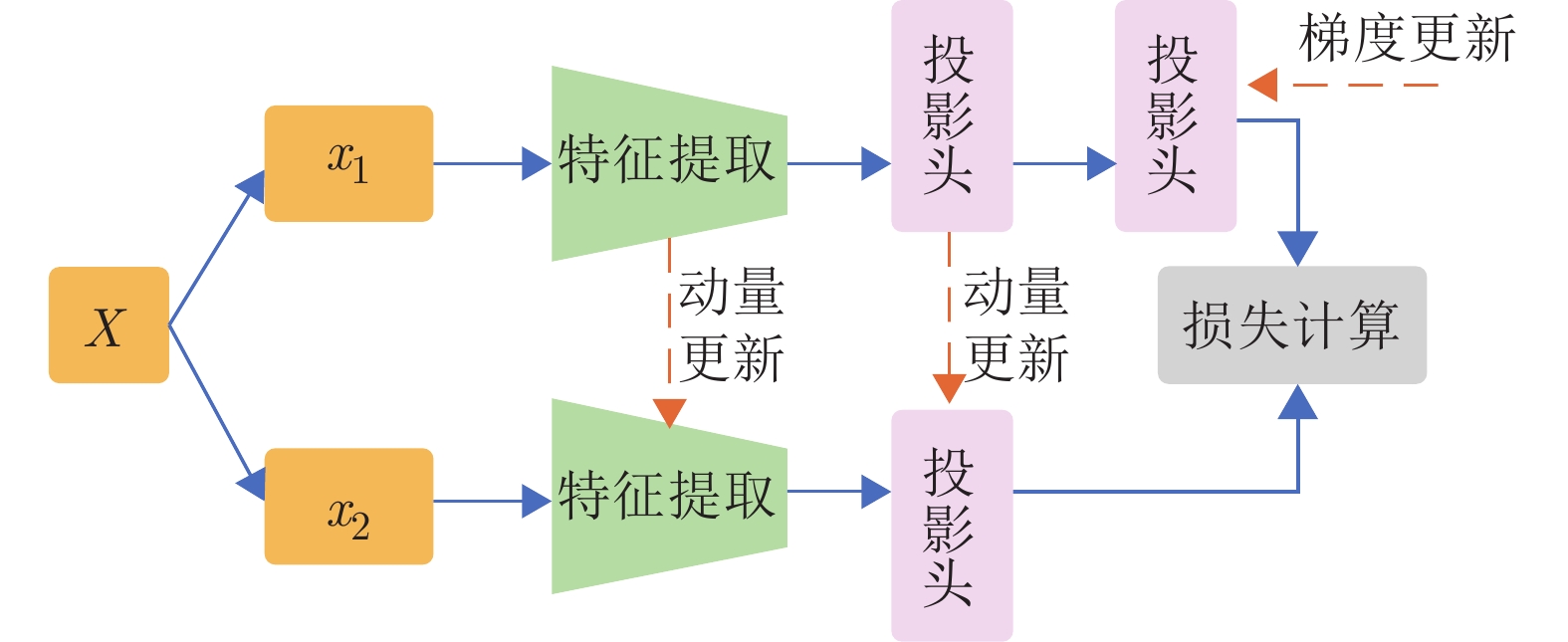
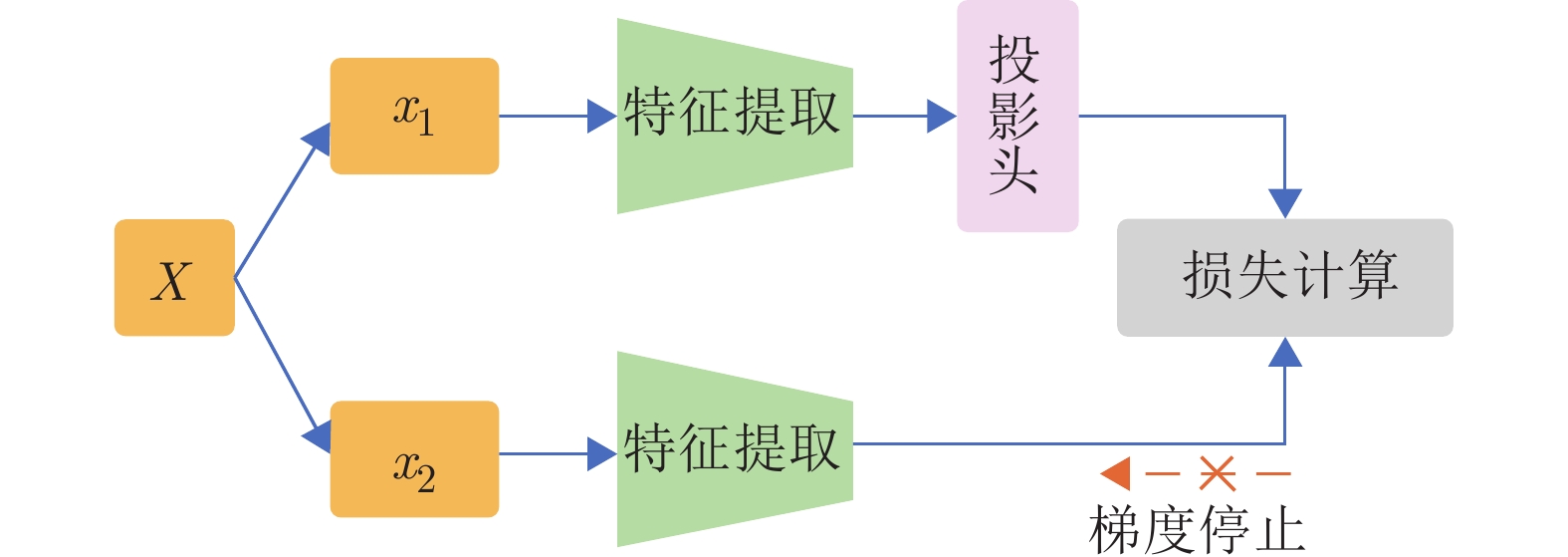
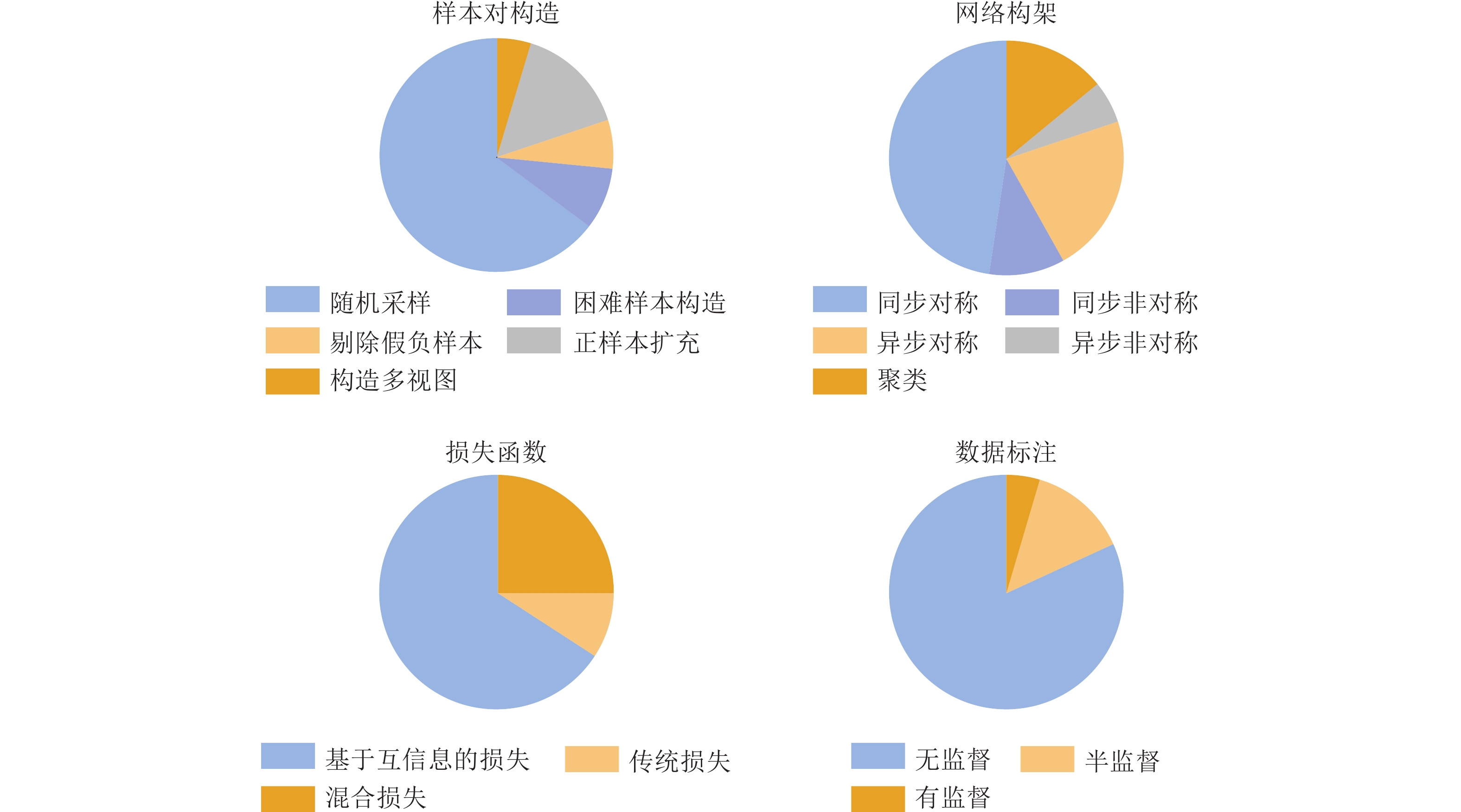
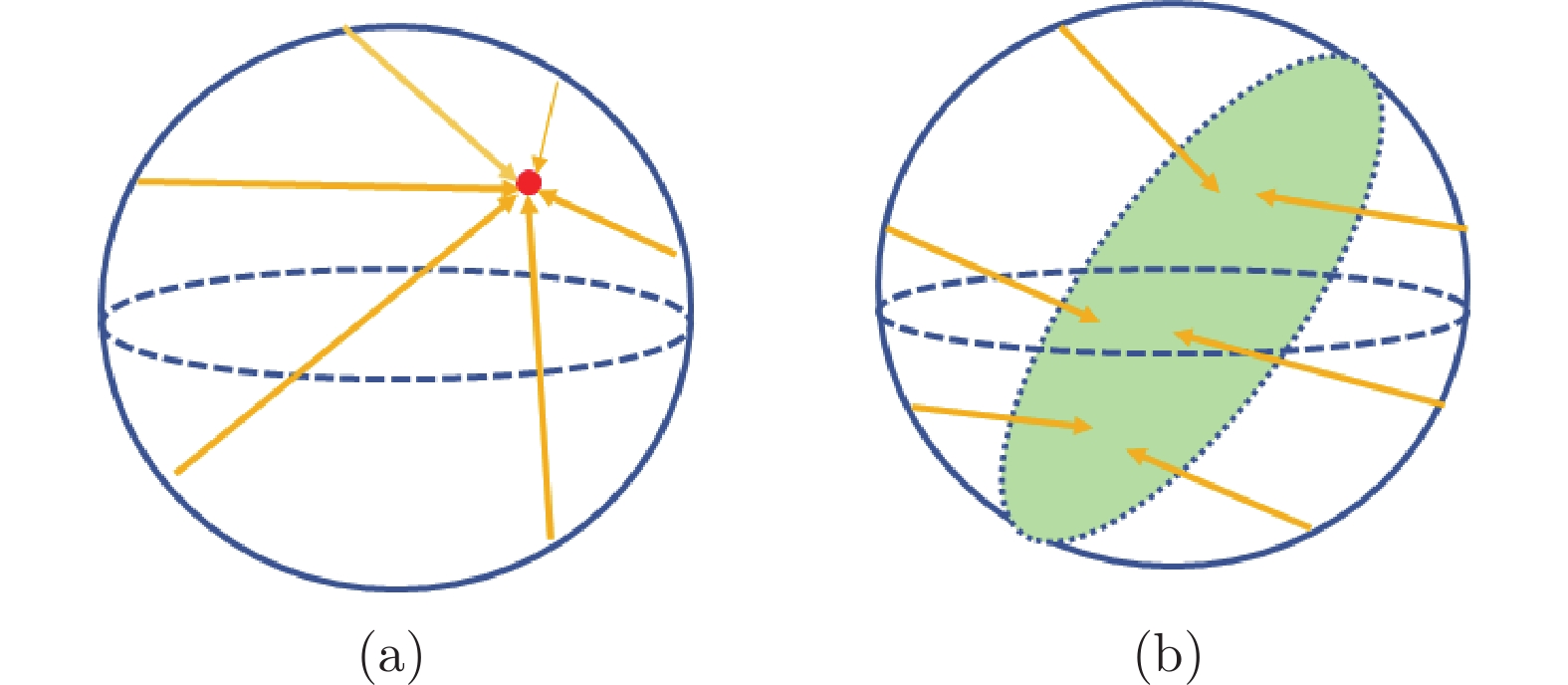
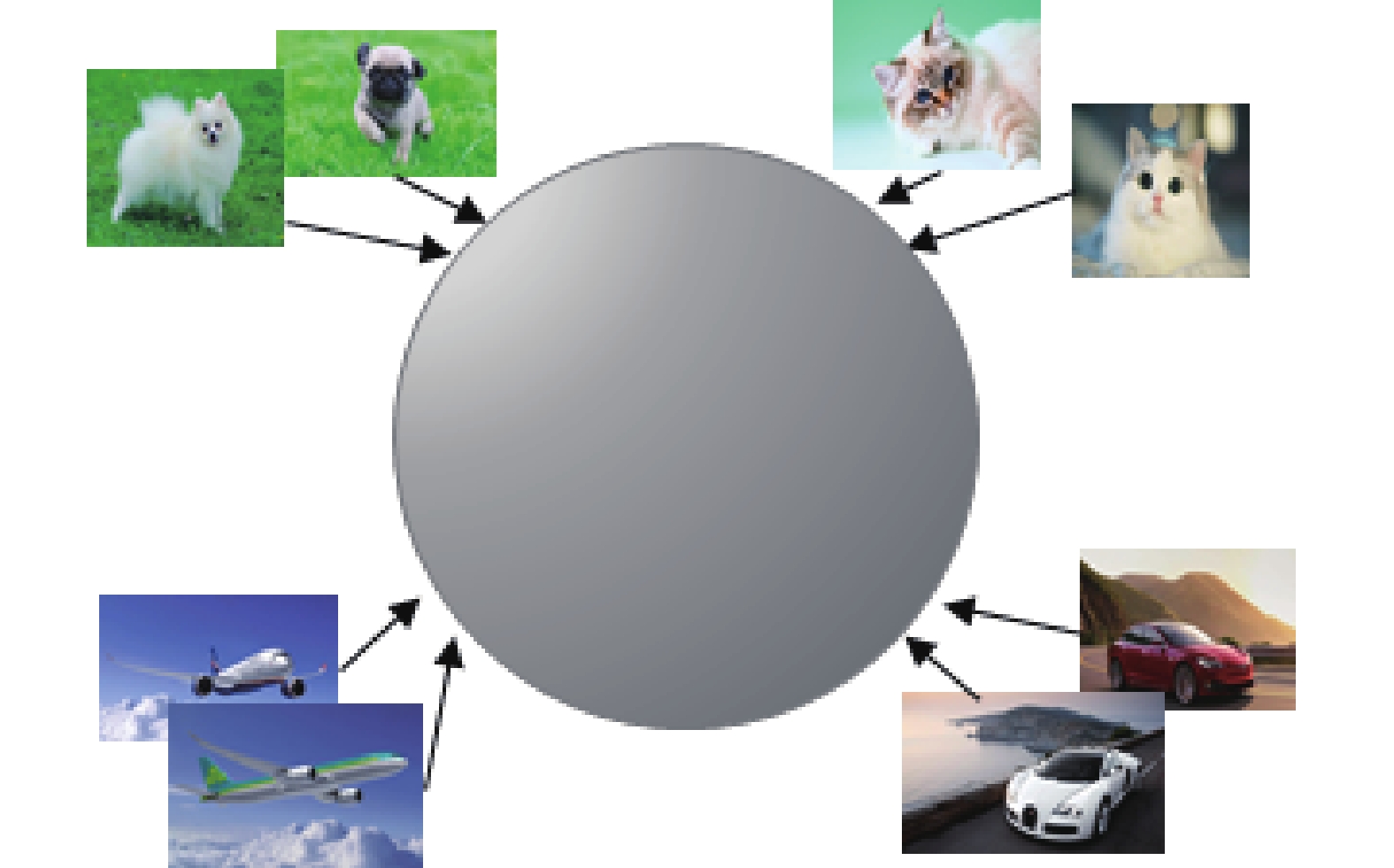
在深度学习中, 如何利用大量、易获取的无标注数据增强神经网络模型的特征表达能力, 是一个具有重要意义的研究问题, 而对比学习是解决该问题的有效方法之一, 近年来得到了学术界的广泛关注, 涌现出一大批新的研究方法和成果. 本文综合考察对比学习近年的发展和进步, 提出一种新的面向对比学习的归类方法, 该方法将现有对比学习方法归纳为5类, 包括: 1) 样本对构造; 2) 图像增广; 3) 网络架构; 4) 损失函数; 5) 应用. 基于提出的归类方法, 对现有对比研究成果进行系统综述, 并评述代表性方法的技术特点和区别, 系统对比分析现有对比学习方法在不同基准数据集上的性能表现. 本文还将梳理对比学习的学术发展史, 并探讨对比学习与自监督学习、度量学习的区别和联系. 最后, 本文将讨论对比学习的现存挑战, 并展望未来发展方向和趋势.
在深度学习中, 如何利用大量、易获取的无标注数据增强神经网络模型的特征表达能力, 是一个具有重要意义的研究问题, 而对比学习是解决该问题的有效方法之一, 近年来得到了学术界的广泛关注, 涌现出一大批新的研究方法和成果. 本文综合考察对比学习近年的发展和进步, 提出一种新的面向对比学习的归类方法, 该方法将现有对比学习方法归纳为5类, 包括: 1) 样本对构造; 2) 图像增广; 3) 网络架构; 4) 损失函数; 5) 应用. 基于提出的归类方法, 对现有对比研究成果进行系统综述, 并评述代表性方法的技术特点和区别, 系统对比分析现有对比学习方法在不同基准数据集上的性能表现. 本文还将梳理对比学习的学术发展史, 并探讨对比学习与自监督学习、度量学习的区别和联系. 最后, 本文将讨论对比学习的现存挑战, 并展望未来发展方向和趋势.



2023, 49(1): 40-53.
doi: 10.16383/j.aas.c220138
摘要:
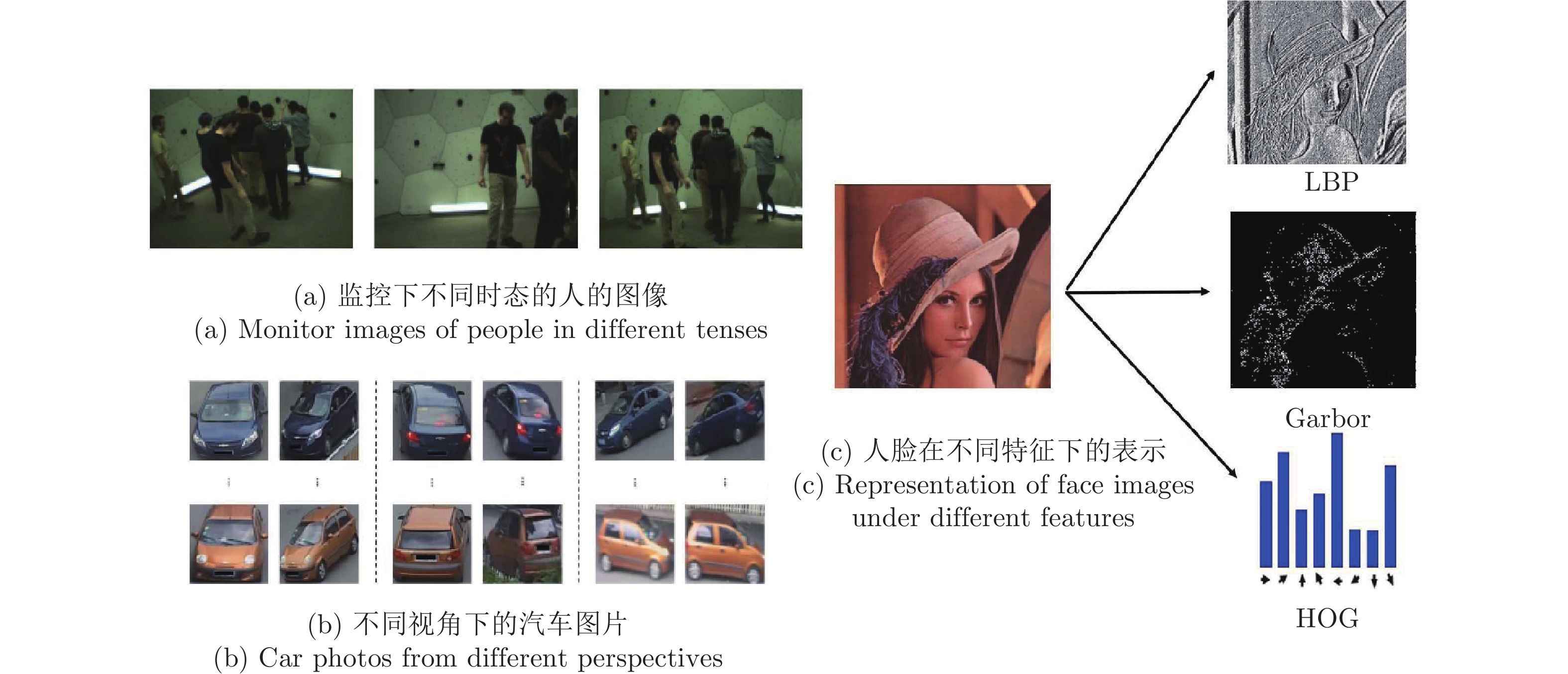
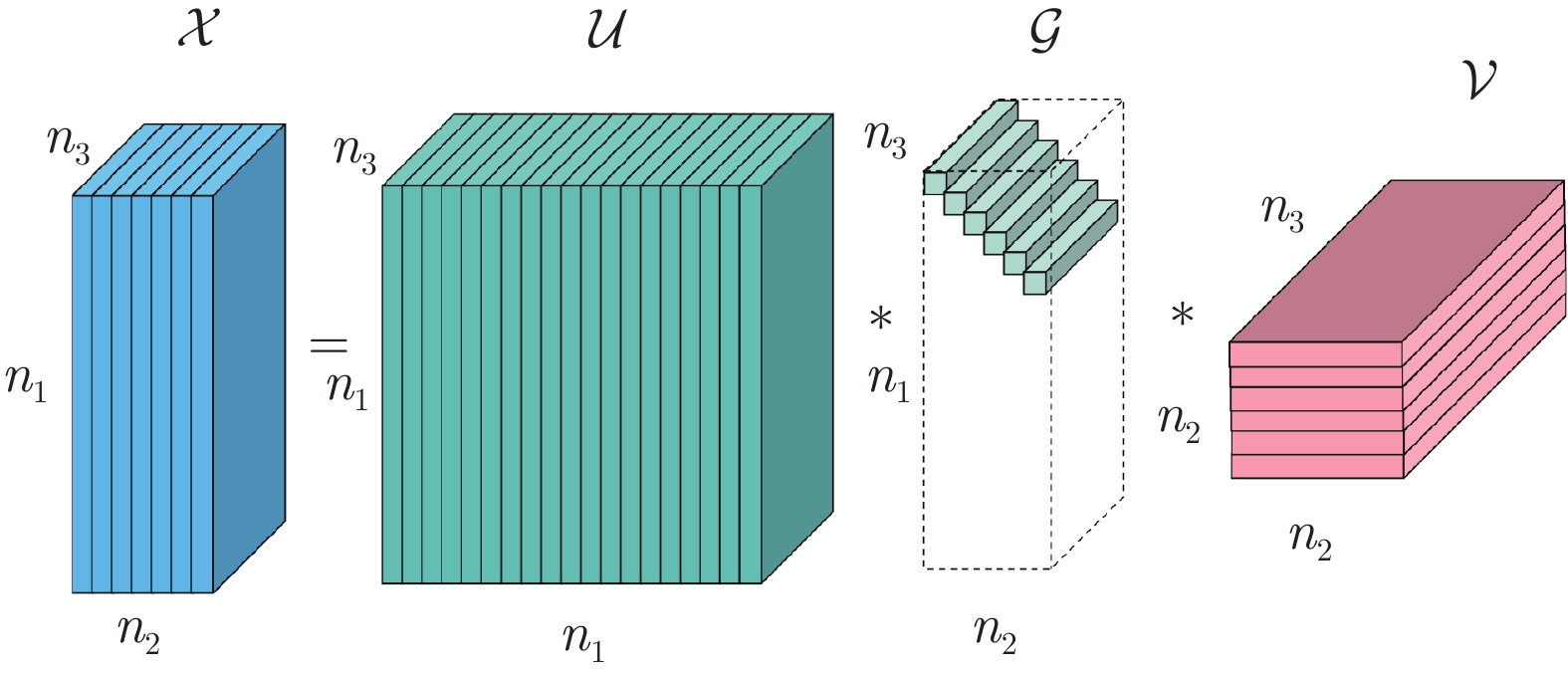
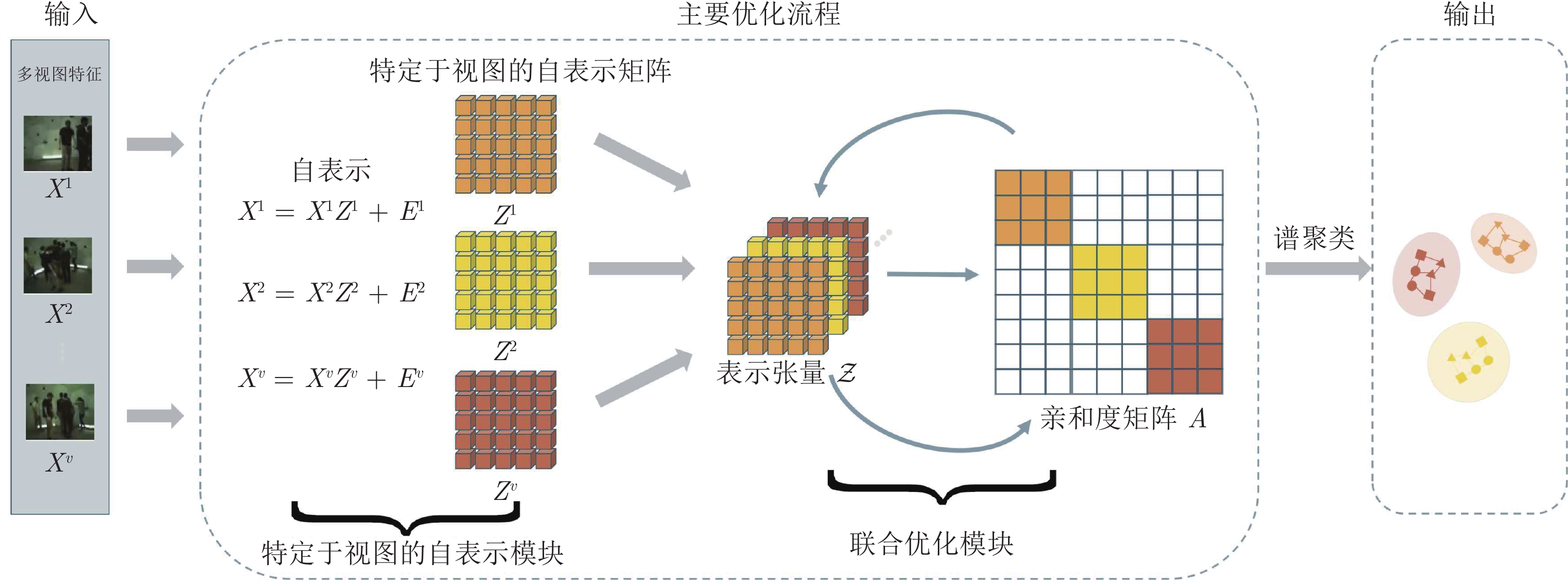
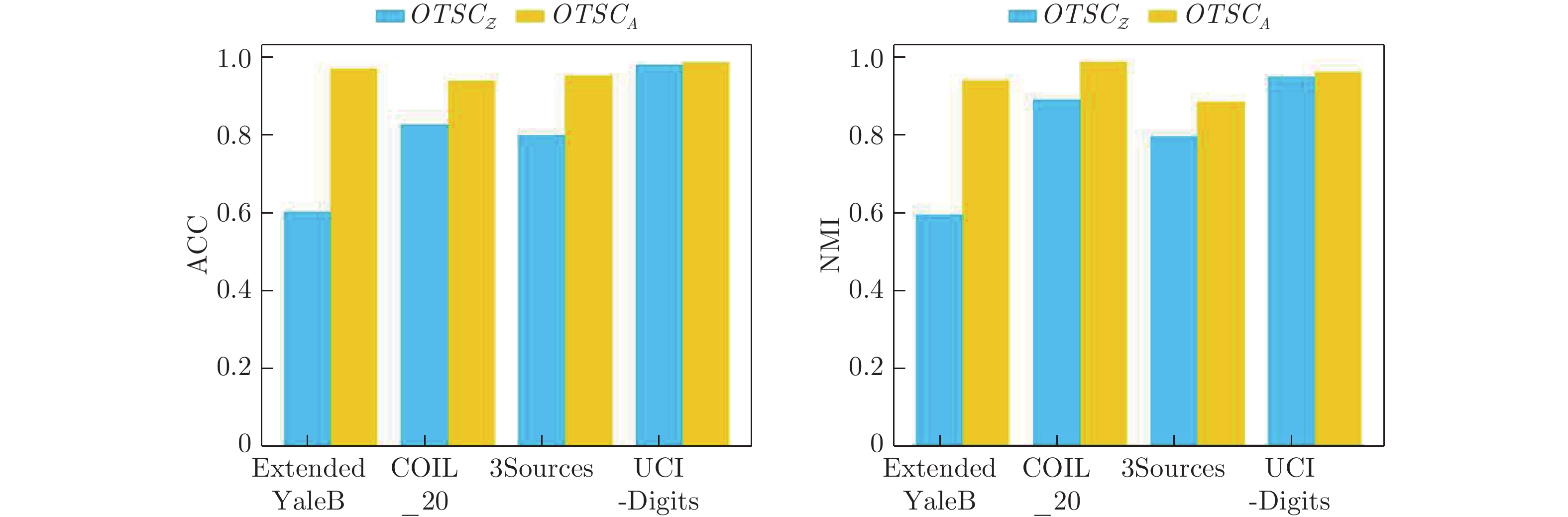
现有多视图子空间聚类算法通常先进行张量表示学习, 进而将学习到的表示张量融合为统一的亲和度矩阵. 然而, 因其独立地学习表示张量和亲和度矩阵, 忽略了两者之间的高度相关性. 为了解决此问题, 提出一种基于一步张量学习的多视图子空间聚类方法, 联合学习表示张量和亲和度矩阵. 具体地, 该方法对表示张量施加低秩张量约束, 以挖掘视图的高阶相关性. 利用自适应最近邻法对亲和度矩阵进行灵活重建. 使用交替方向乘子法对模型进行优化求解, 通过对真实多视图数据的实验表明, 较于最新的多视图聚类方法, 提出的算法具有更好的聚类准确性.
现有多视图子空间聚类算法通常先进行张量表示学习, 进而将学习到的表示张量融合为统一的亲和度矩阵. 然而, 因其独立地学习表示张量和亲和度矩阵, 忽略了两者之间的高度相关性. 为了解决此问题, 提出一种基于一步张量学习的多视图子空间聚类方法, 联合学习表示张量和亲和度矩阵. 具体地, 该方法对表示张量施加低秩张量约束, 以挖掘视图的高阶相关性. 利用自适应最近邻法对亲和度矩阵进行灵活重建. 使用交替方向乘子法对模型进行优化求解, 通过对真实多视图数据的实验表明, 较于最新的多视图聚类方法, 提出的算法具有更好的聚类准确性.


2023, 49(1): 54-66.
doi: 10.16383/j.aas.c220103
摘要:
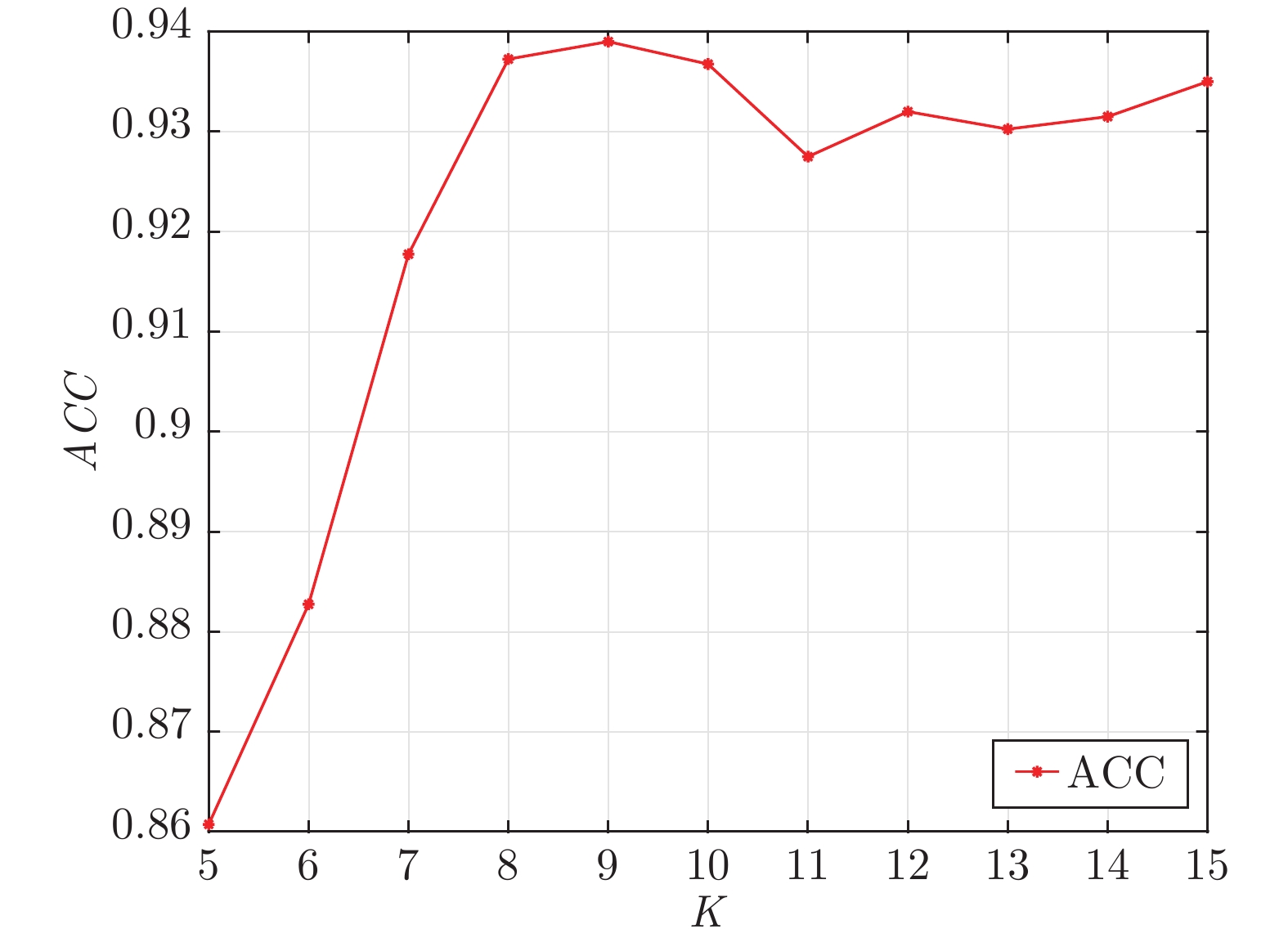
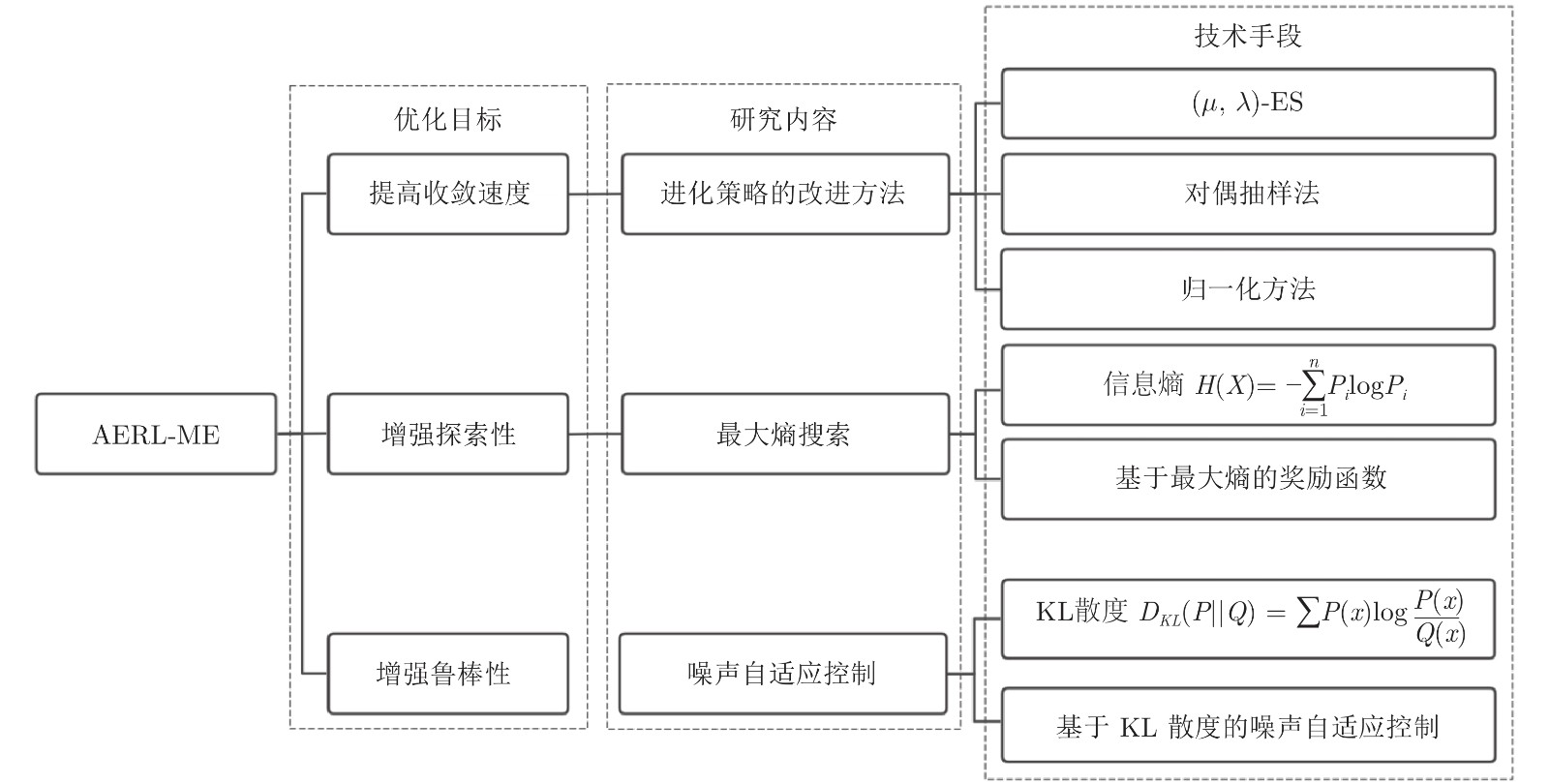
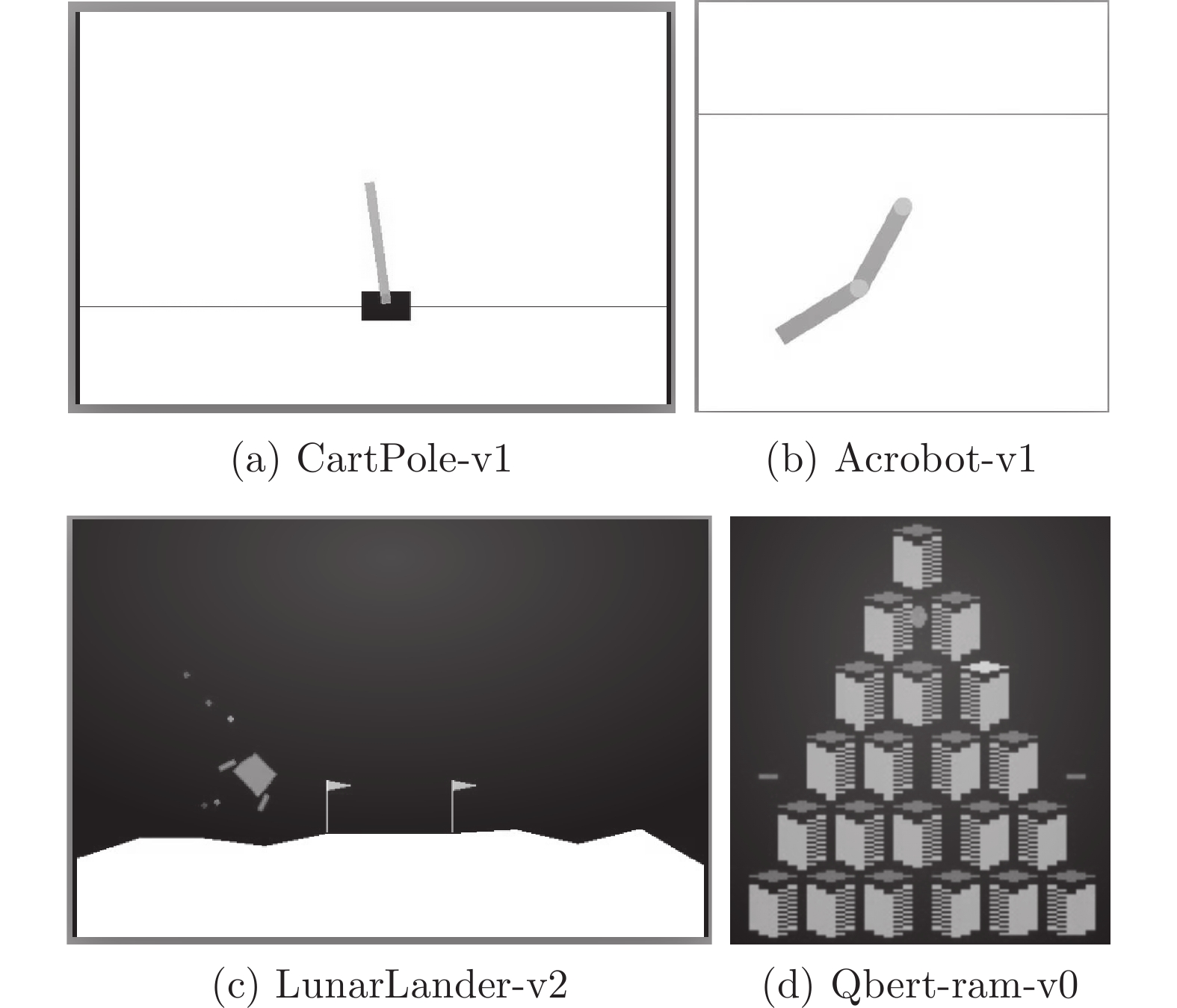
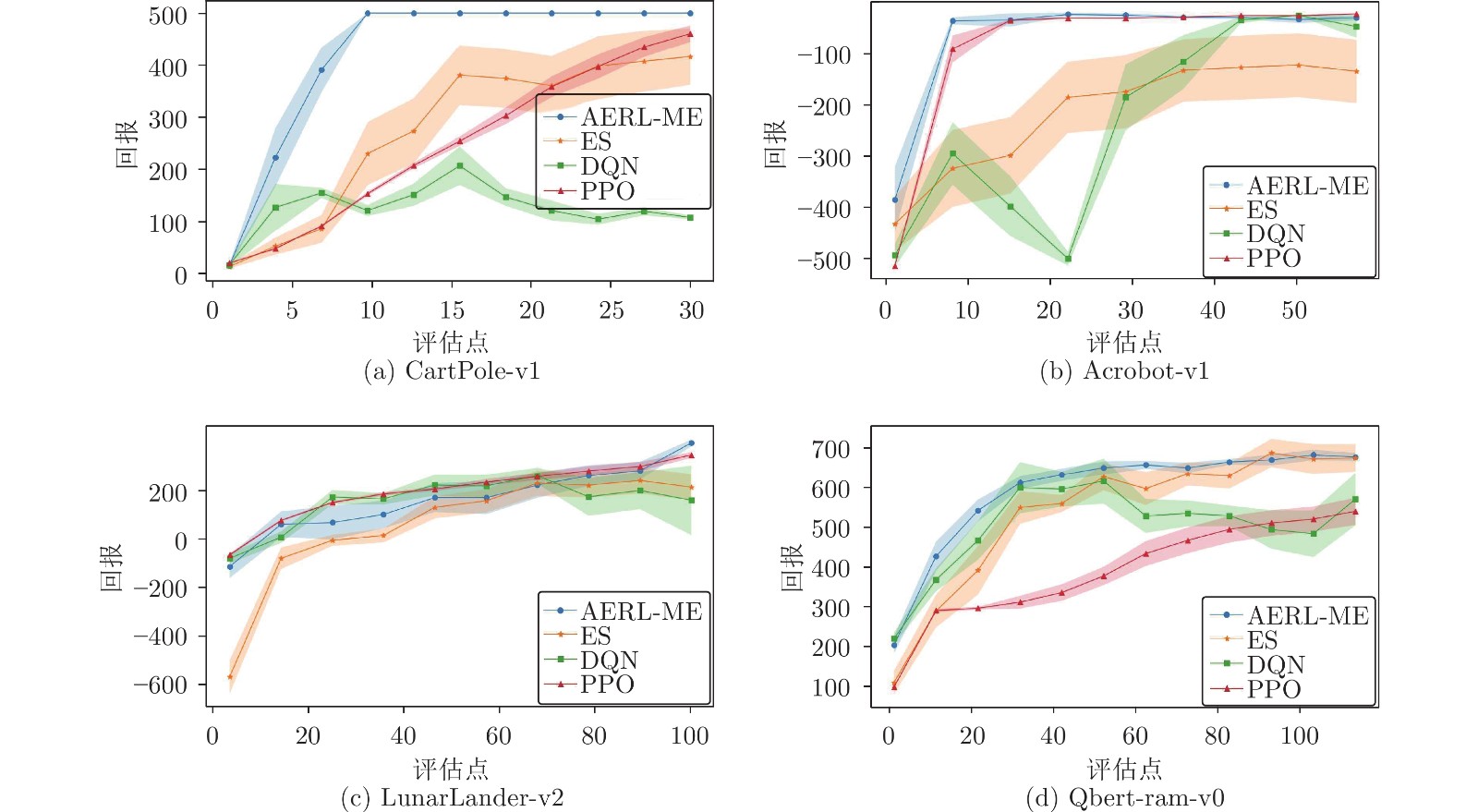
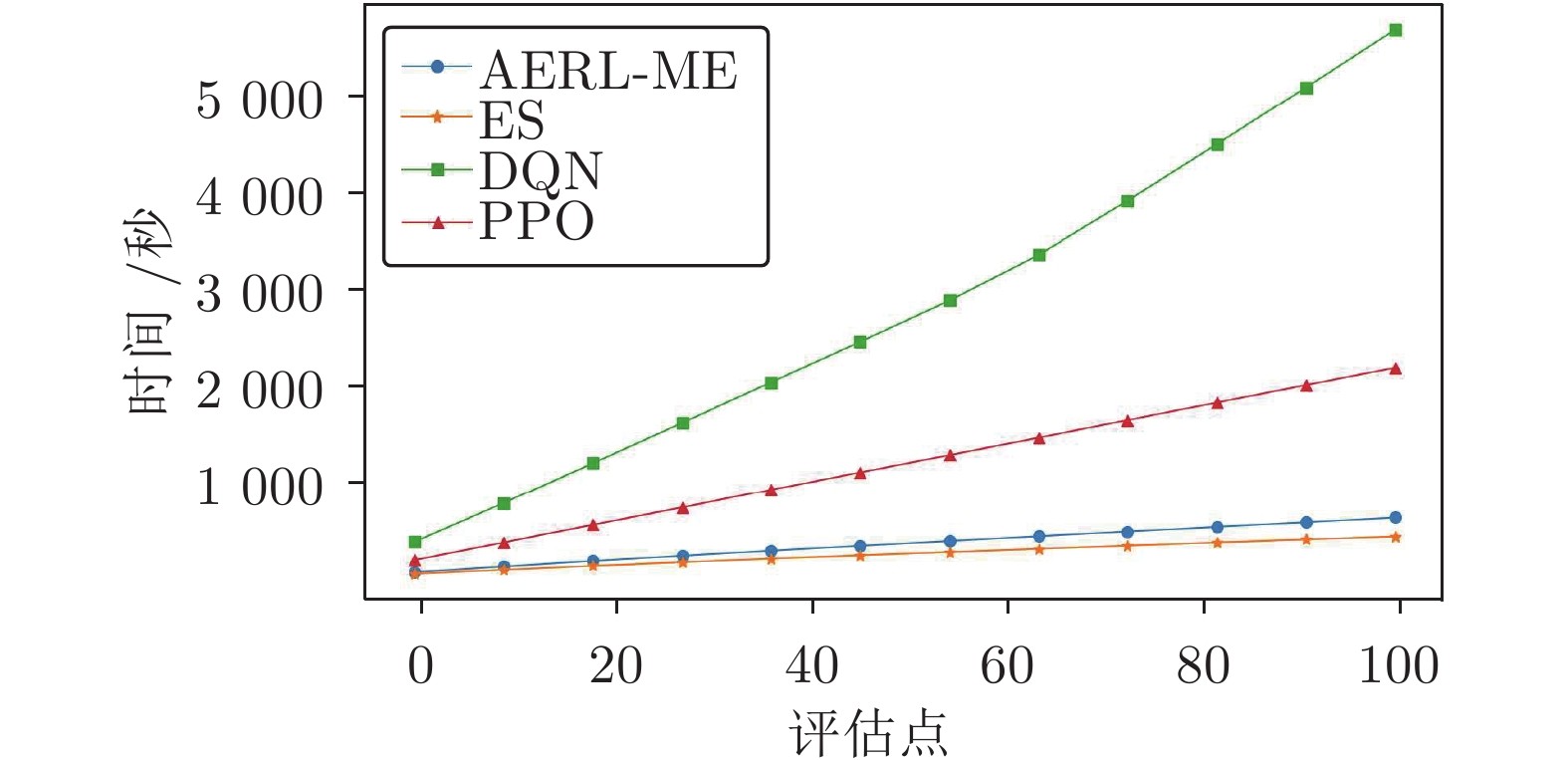
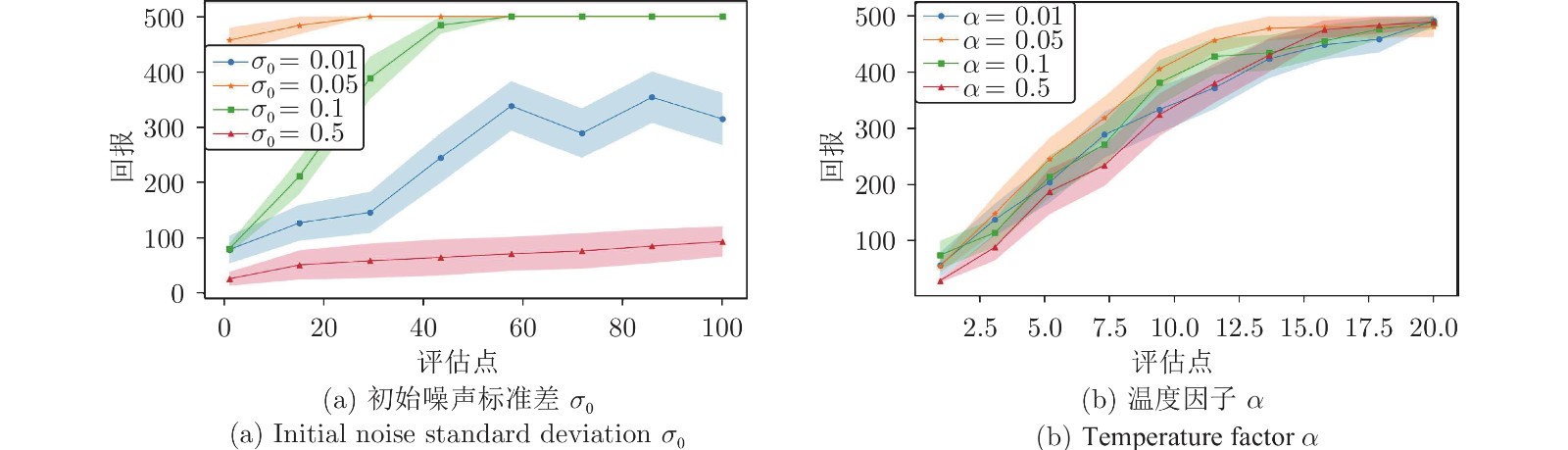
近年来, 进化策略由于其无梯度优化和高并行化效率等优点, 在深度强化学习领域得到了广泛的应用. 然而, 传统基于进化策略的深度强化学习方法存在着学习速度慢、容易收敛到局部最优和鲁棒性较弱等问题. 为此, 提出了一种基于自适应噪声的最大熵进化强化学习方法. 首先, 引入了一种进化策略的改进办法, 在“优胜”的基础上加强了“劣汰”, 从而提高进化强化学习的收敛速度; 其次, 在目标函数中引入了策略最大熵正则项, 来保证策略的随机性进而鼓励智能体对新策略的探索; 最后, 提出了自适应噪声控制的方式, 根据当前进化情形智能化调整进化策略的搜索范围, 进而减少对先验知识的依赖并提升算法的鲁棒性. 实验结果表明, 该方法较之传统方法在学习速度、最优性收敛和鲁棒性上有比较明显的提升.
近年来, 进化策略由于其无梯度优化和高并行化效率等优点, 在深度强化学习领域得到了广泛的应用. 然而, 传统基于进化策略的深度强化学习方法存在着学习速度慢、容易收敛到局部最优和鲁棒性较弱等问题. 为此, 提出了一种基于自适应噪声的最大熵进化强化学习方法. 首先, 引入了一种进化策略的改进办法, 在“优胜”的基础上加强了“劣汰”, 从而提高进化强化学习的收敛速度; 其次, 在目标函数中引入了策略最大熵正则项, 来保证策略的随机性进而鼓励智能体对新策略的探索; 最后, 提出了自适应噪声控制的方式, 根据当前进化情形智能化调整进化策略的搜索范围, 进而减少对先验知识的依赖并提升算法的鲁棒性. 实验结果表明, 该方法较之传统方法在学习速度、最优性收敛和鲁棒性上有比较明显的提升.

2023, 49(1): 67-78.
doi: 10.16383/j.aas.c210123
摘要:
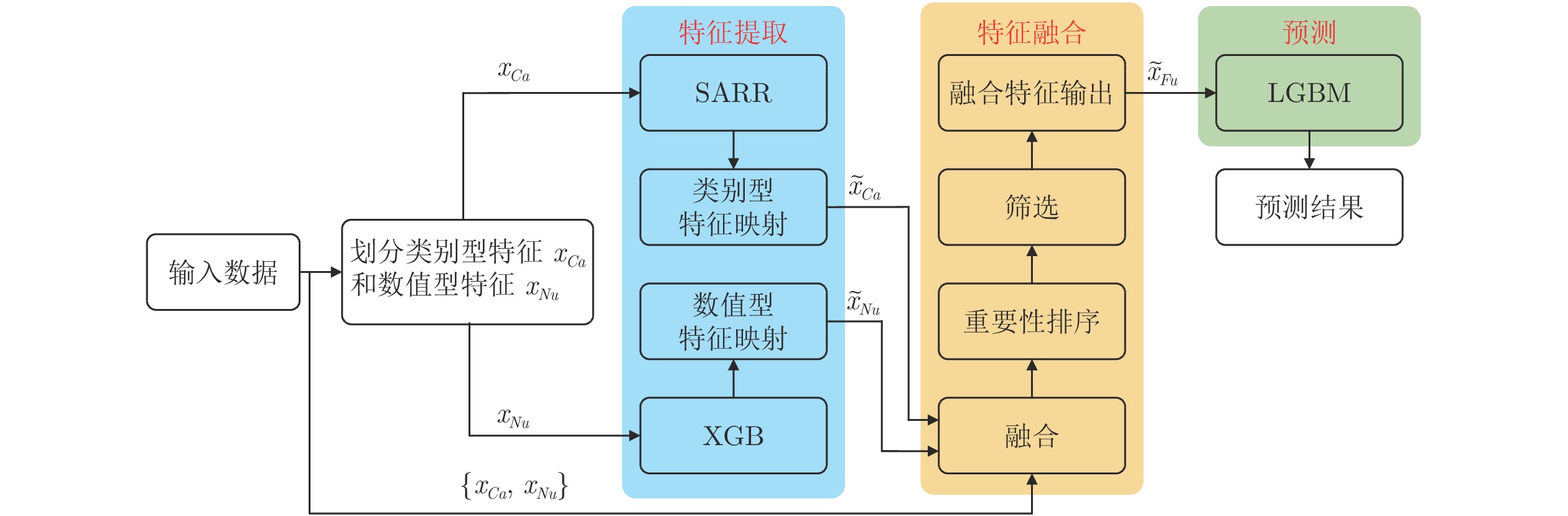
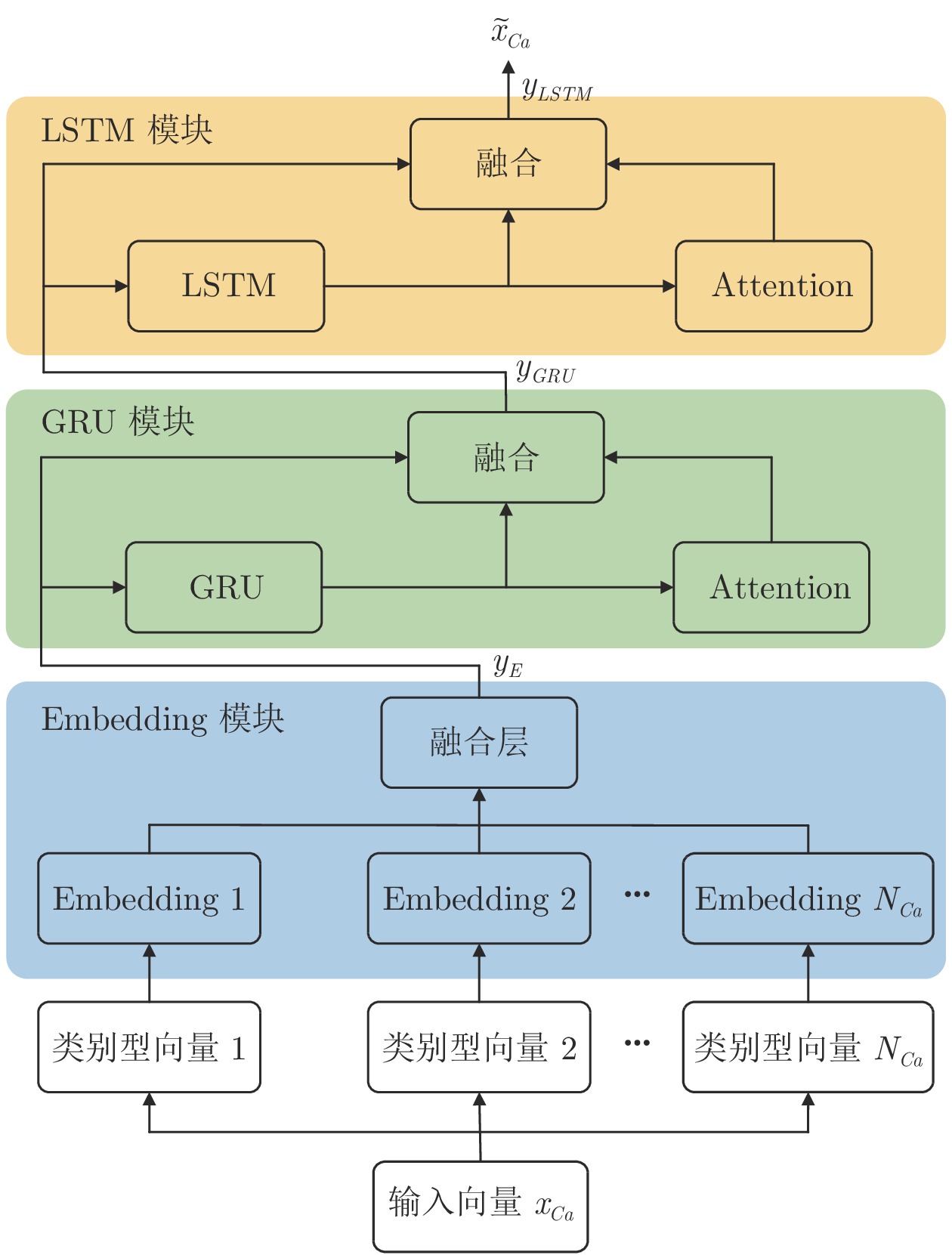
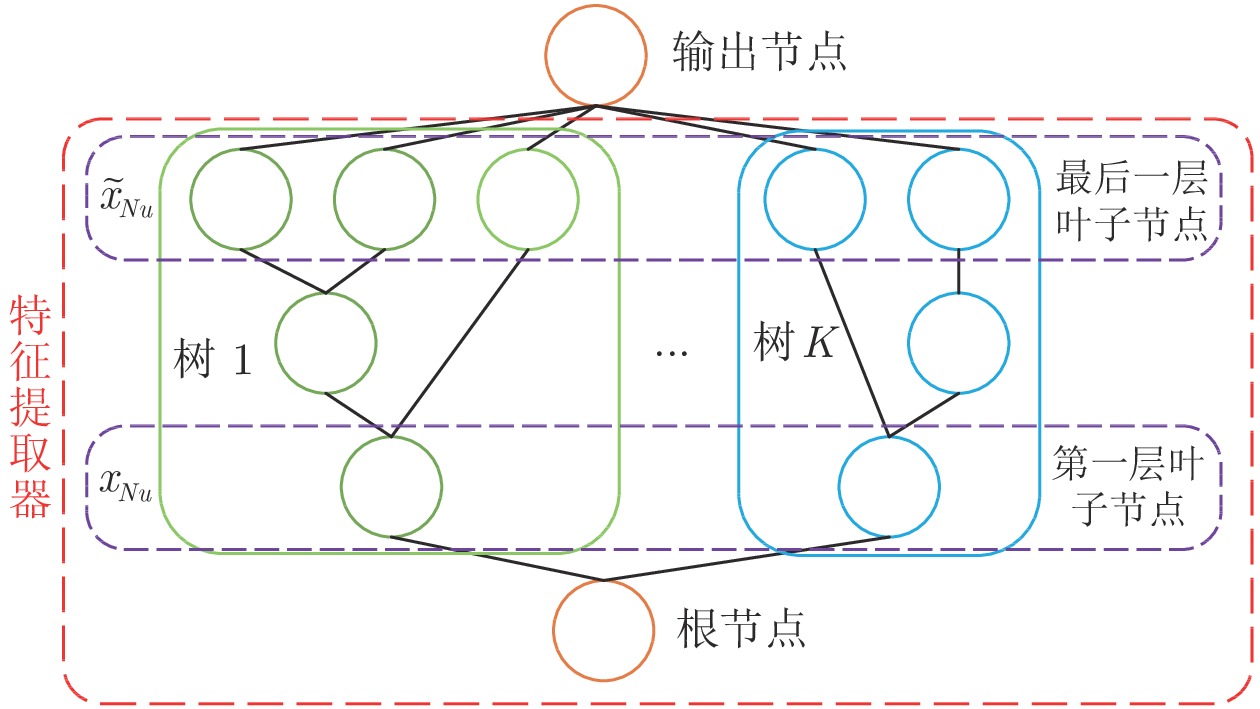
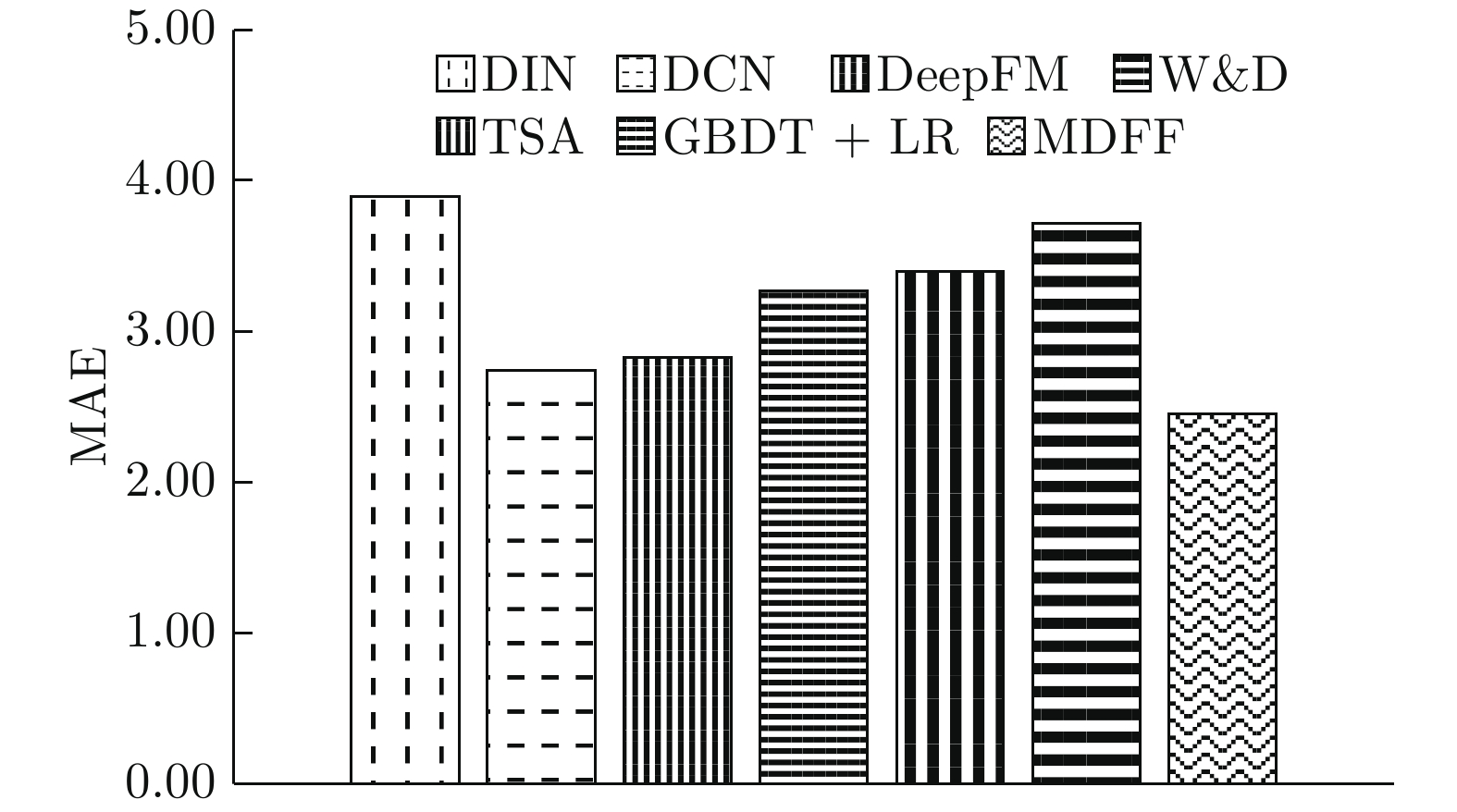
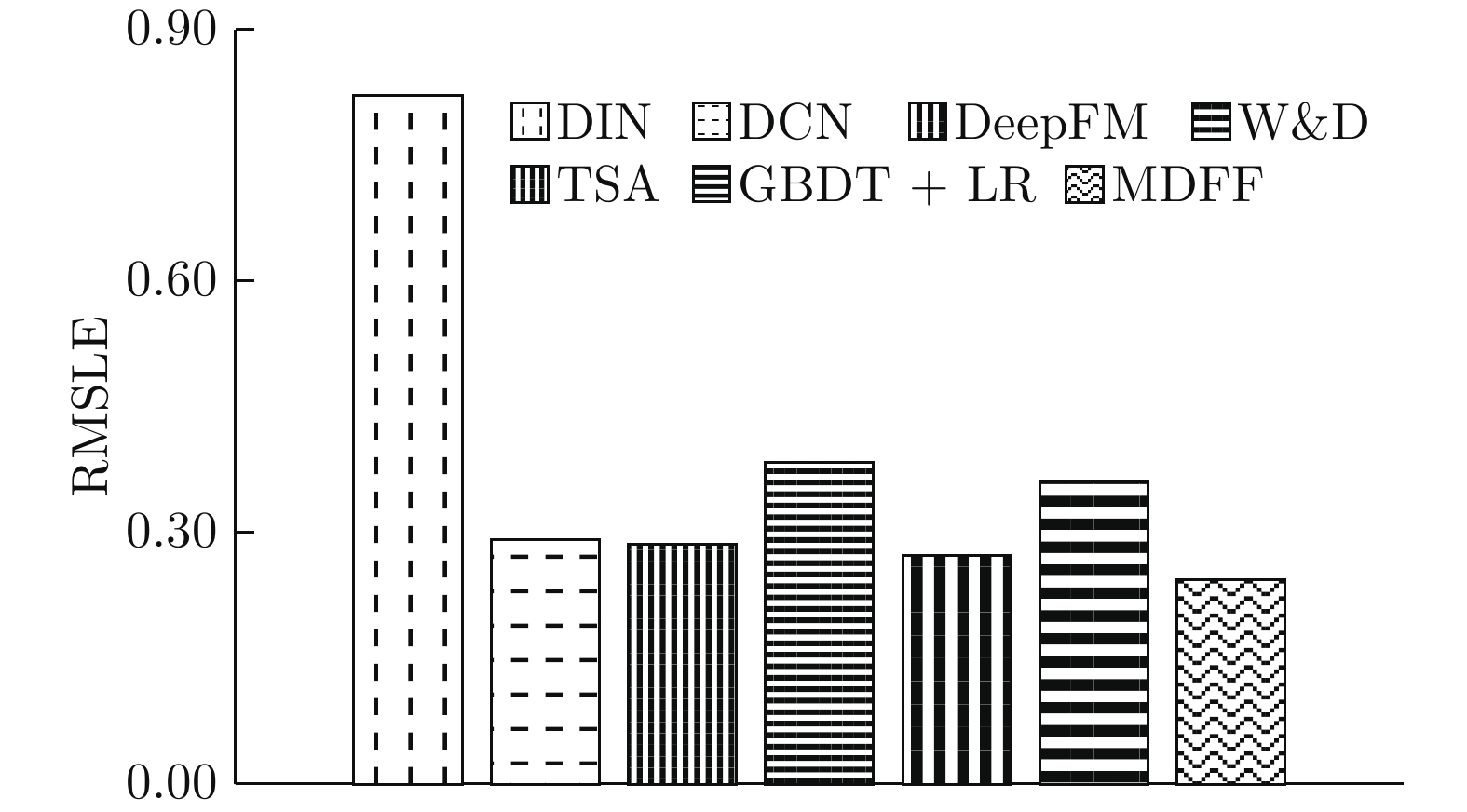
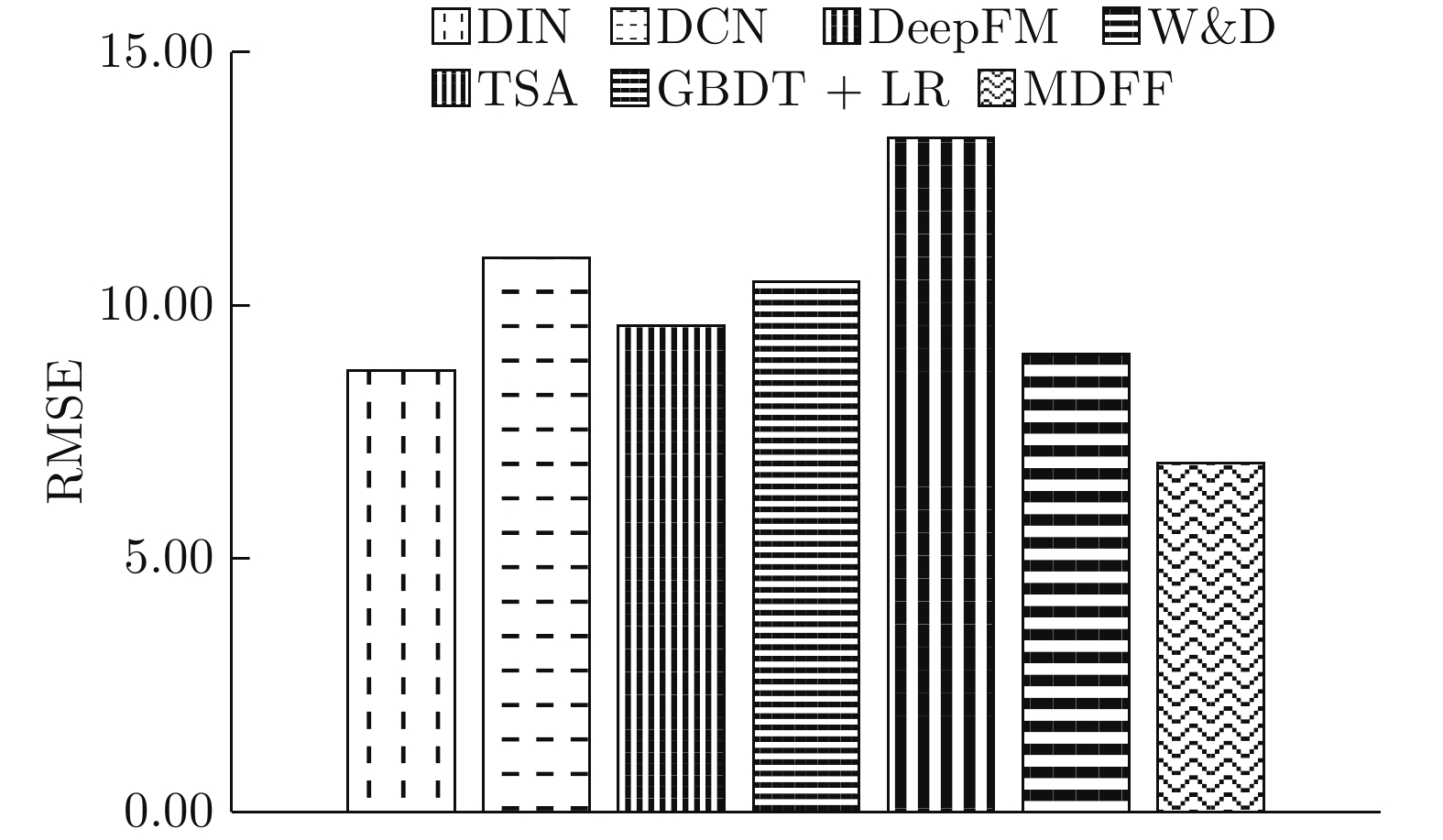
任务执行时间估计是云数据中心环境下工作流调度的前提. 针对现有工作流任务执行时间预测方法缺乏类别型和数值型数据特征的有效提取问题, 提出了基于多维度特征融合的预测方法. 首先, 通过构建具有注意力机制的堆叠残差循环网络, 将类别型数据从高维稀疏的特征空间映射到低维稠密的特征空间, 以增强类别型数据的解析能力, 有效提取类别型特征; 其次, 采用极限梯度提升算法对数值型数据进行离散化编码, 通过对稠密空间的输入向量进行稀疏化处理, 提高了数值型特征的非线性表达能力; 在此基础上, 设计多维异质特征融合策略, 将所提取的类别型、数值型特征与样本的原始输入特征进行融合, 建立基于多维融合特征的预测模型, 实现了云工作流任务执行时间的精准预测; 最后, 在真实云数据中心集群数据集上进行了仿真实验. 实验结果表明, 相对于已有的基准算法, 该方法具有较高的预测精度, 可用于大数据驱动的云工作流任务执行时间预测.
任务执行时间估计是云数据中心环境下工作流调度的前提. 针对现有工作流任务执行时间预测方法缺乏类别型和数值型数据特征的有效提取问题, 提出了基于多维度特征融合的预测方法. 首先, 通过构建具有注意力机制的堆叠残差循环网络, 将类别型数据从高维稀疏的特征空间映射到低维稠密的特征空间, 以增强类别型数据的解析能力, 有效提取类别型特征; 其次, 采用极限梯度提升算法对数值型数据进行离散化编码, 通过对稠密空间的输入向量进行稀疏化处理, 提高了数值型特征的非线性表达能力; 在此基础上, 设计多维异质特征融合策略, 将所提取的类别型、数值型特征与样本的原始输入特征进行融合, 建立基于多维融合特征的预测模型, 实现了云工作流任务执行时间的精准预测; 最后, 在真实云数据中心集群数据集上进行了仿真实验. 实验结果表明, 相对于已有的基准算法, 该方法具有较高的预测精度, 可用于大数据驱动的云工作流任务执行时间预测.

2023, 49(1): 79-90.
doi: 10.16383/j.aas.c210156
摘要:
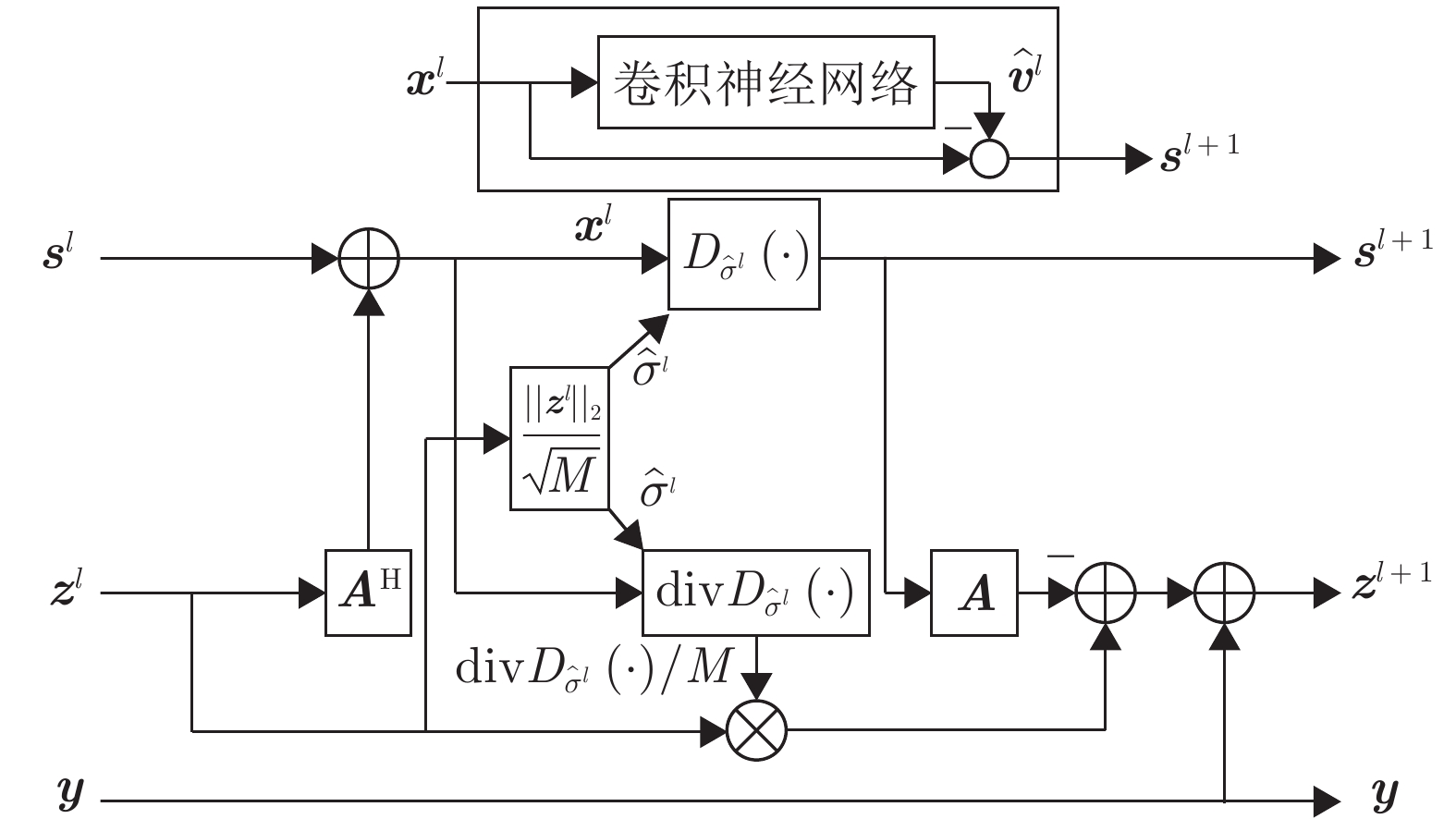
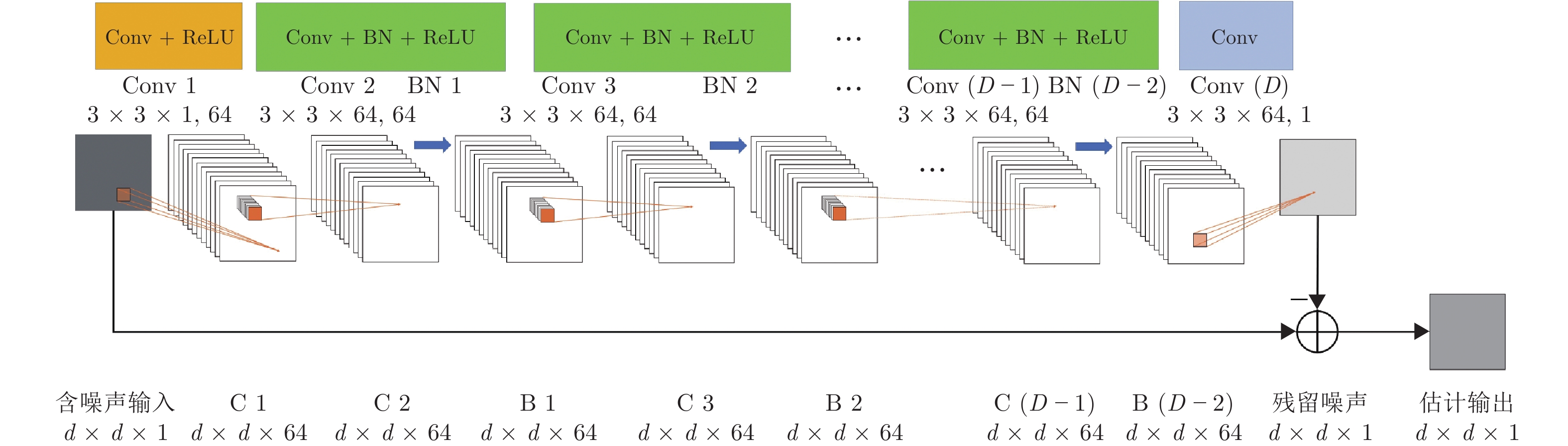
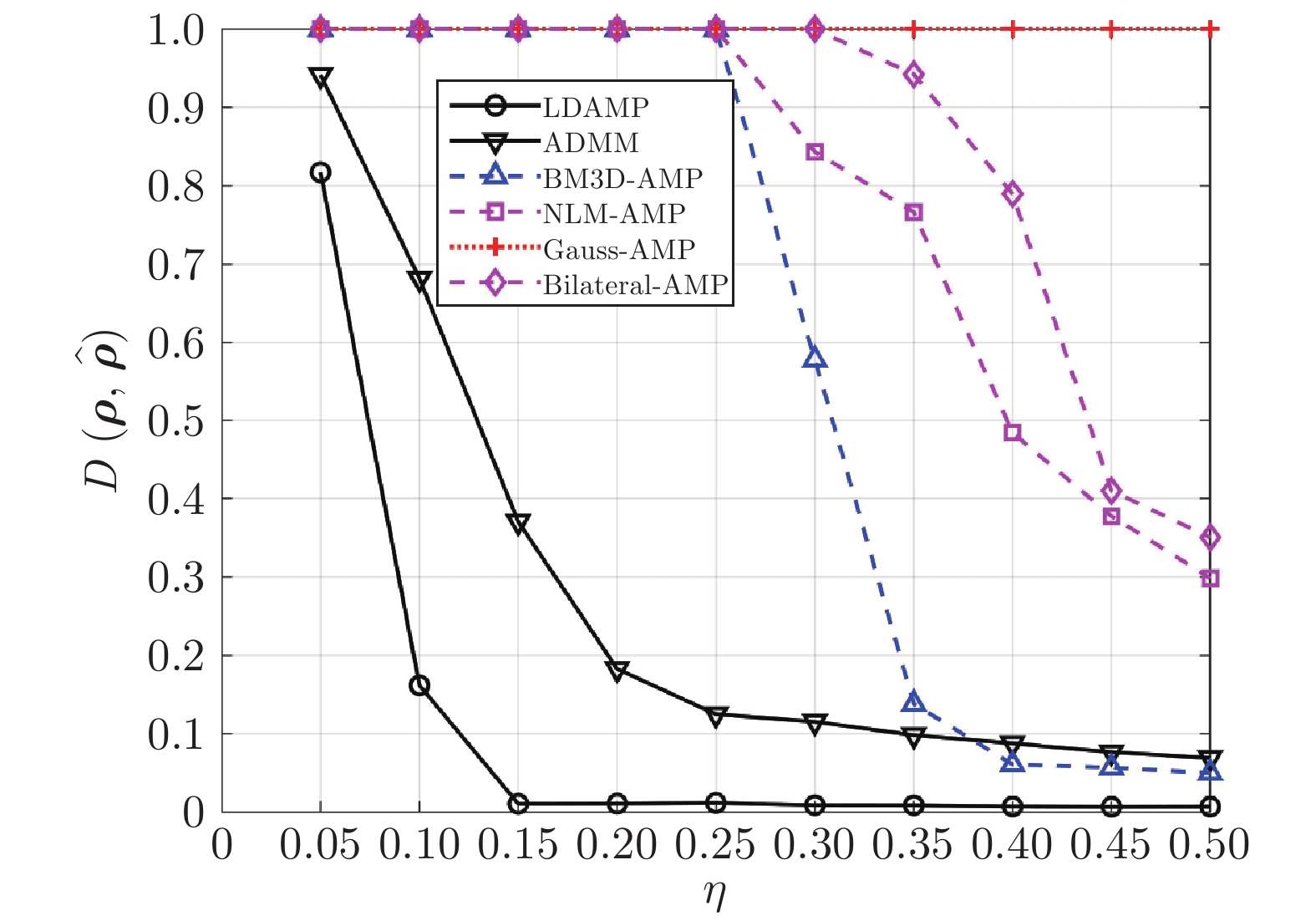
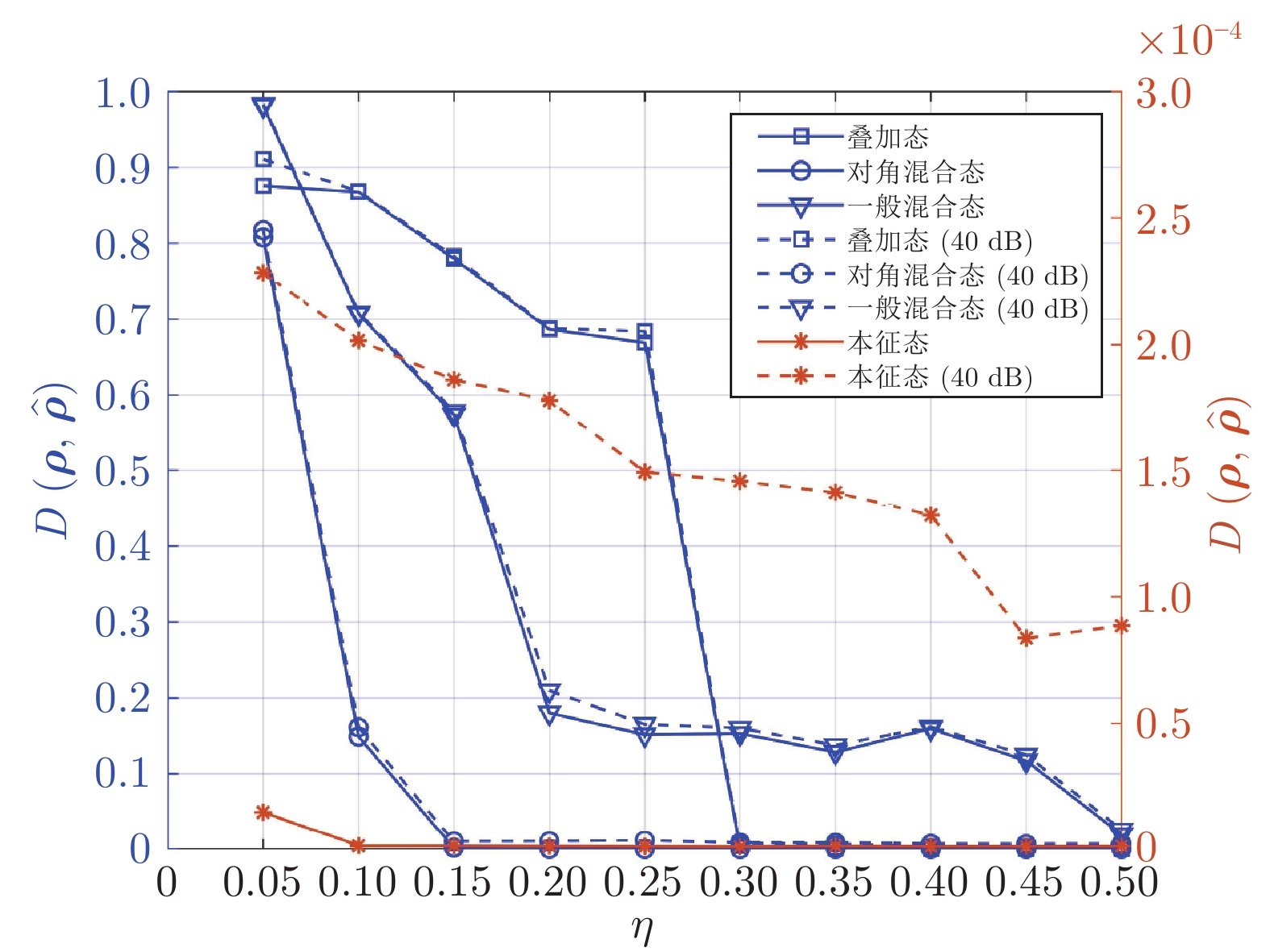
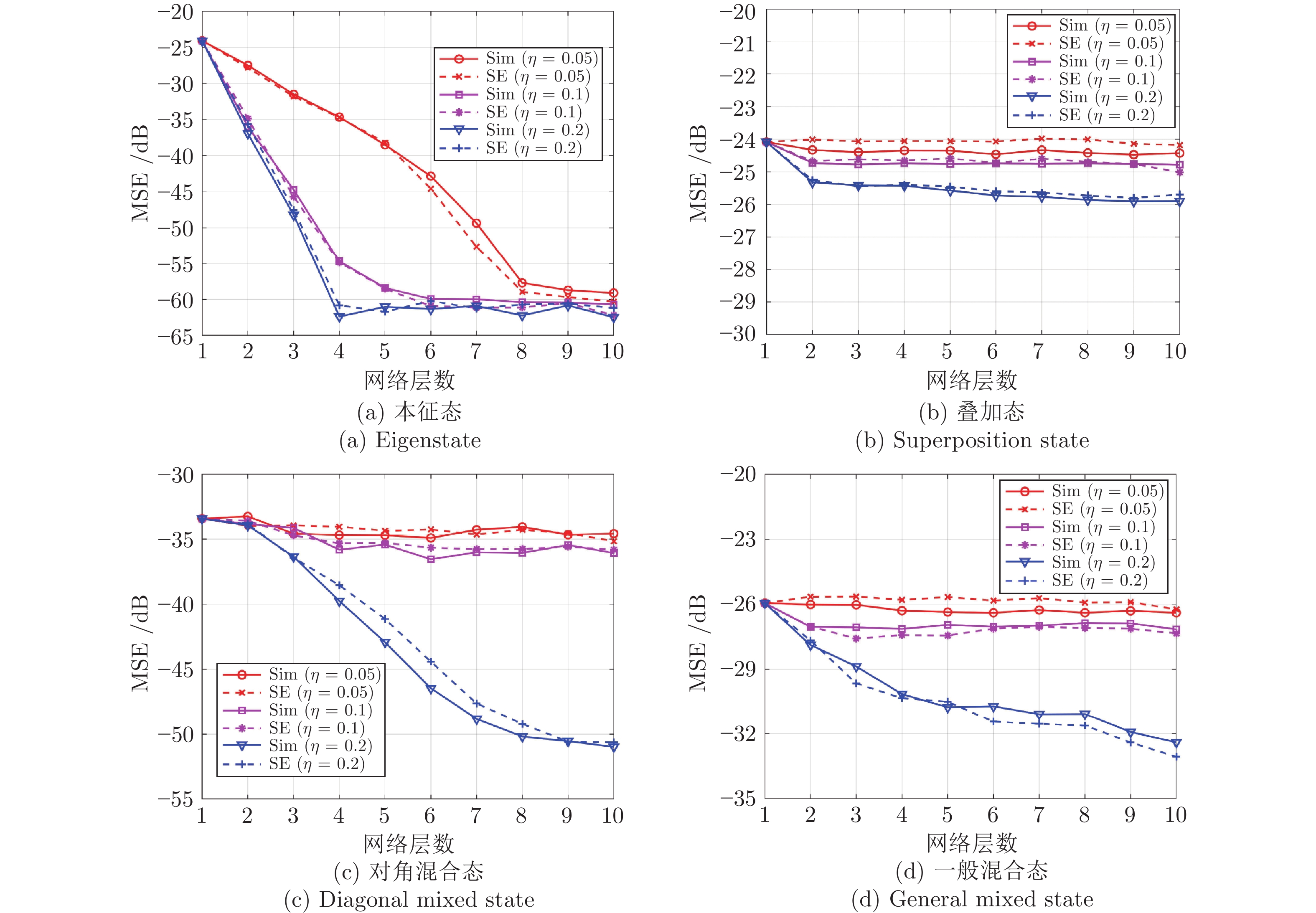
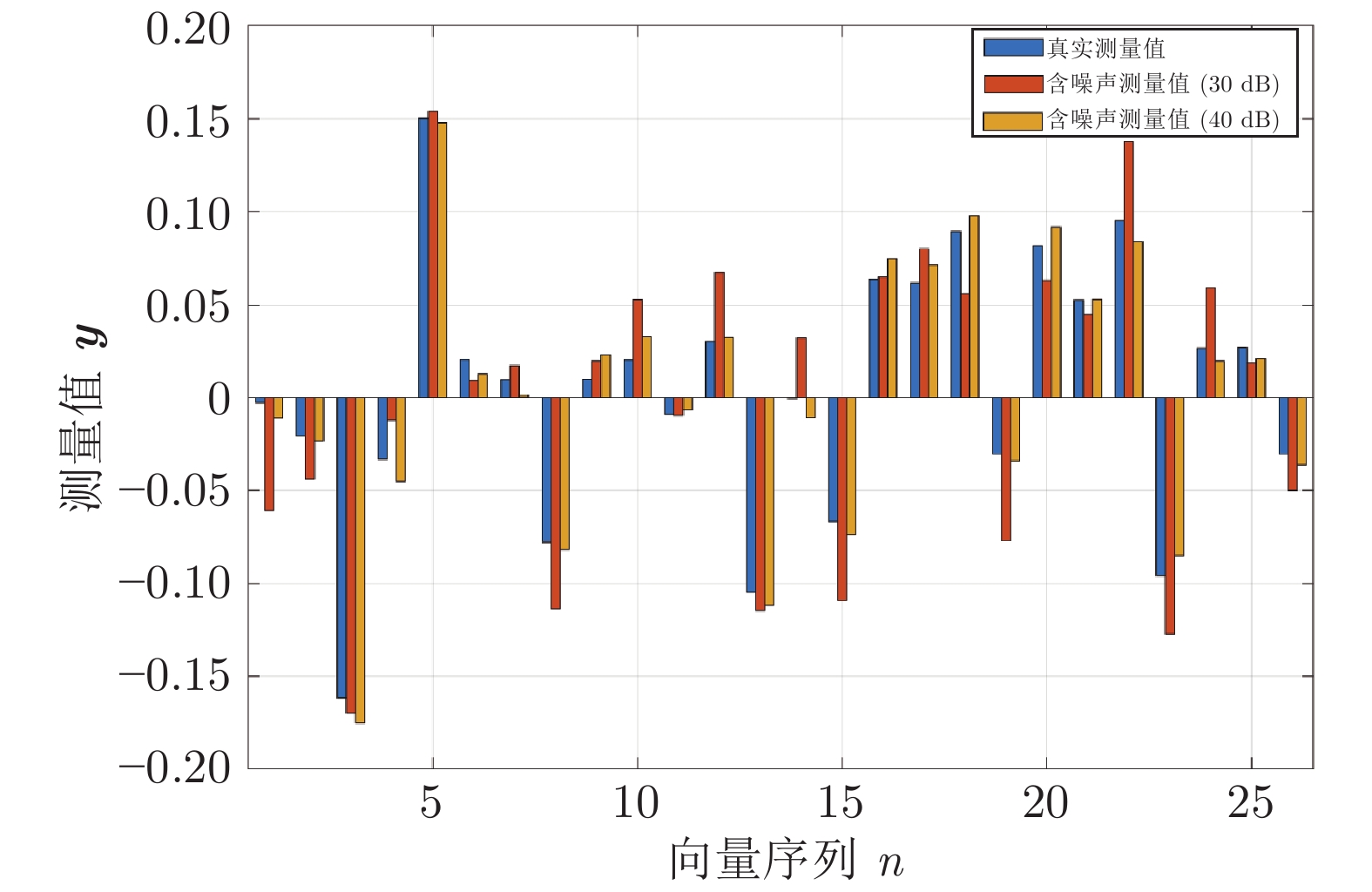
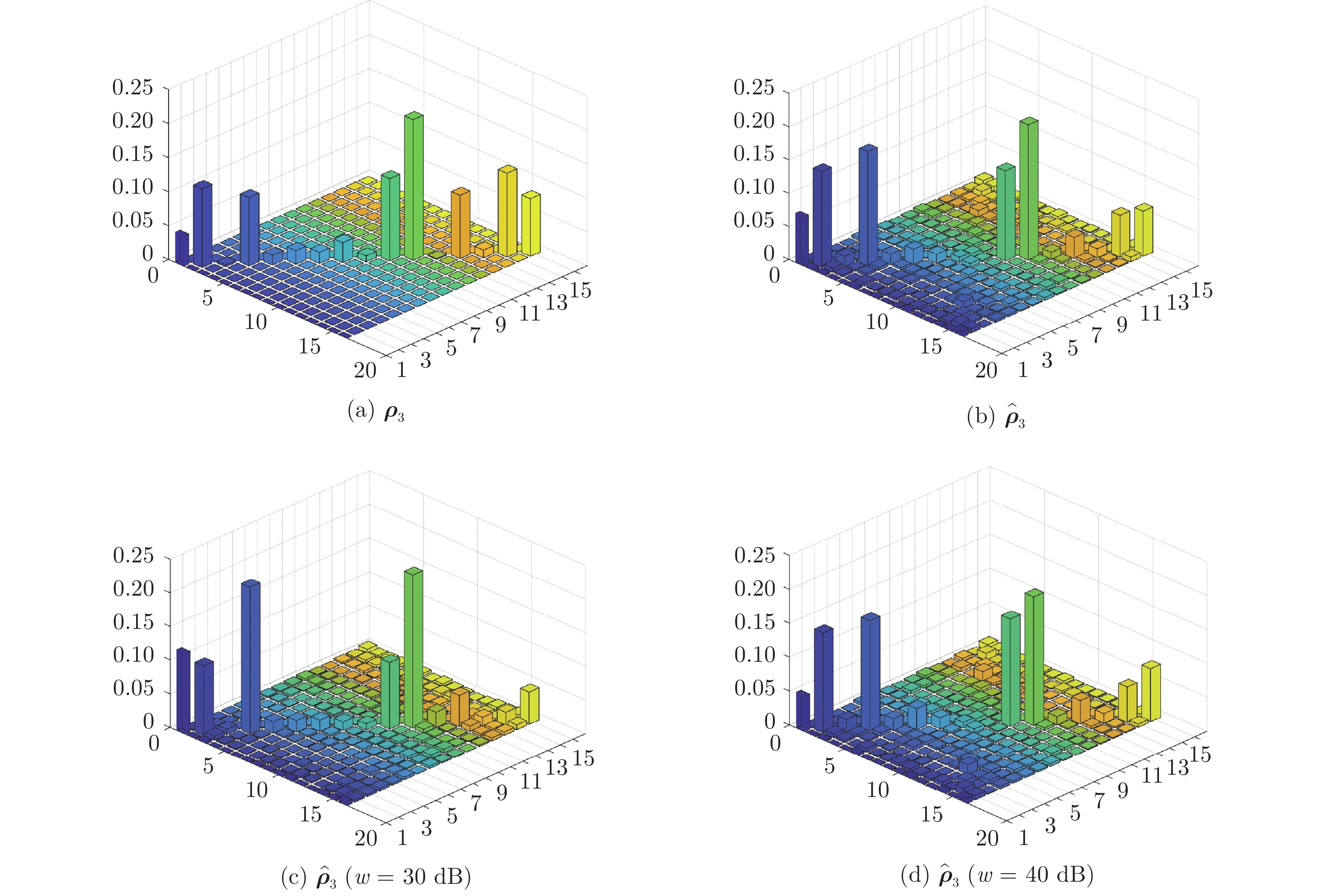
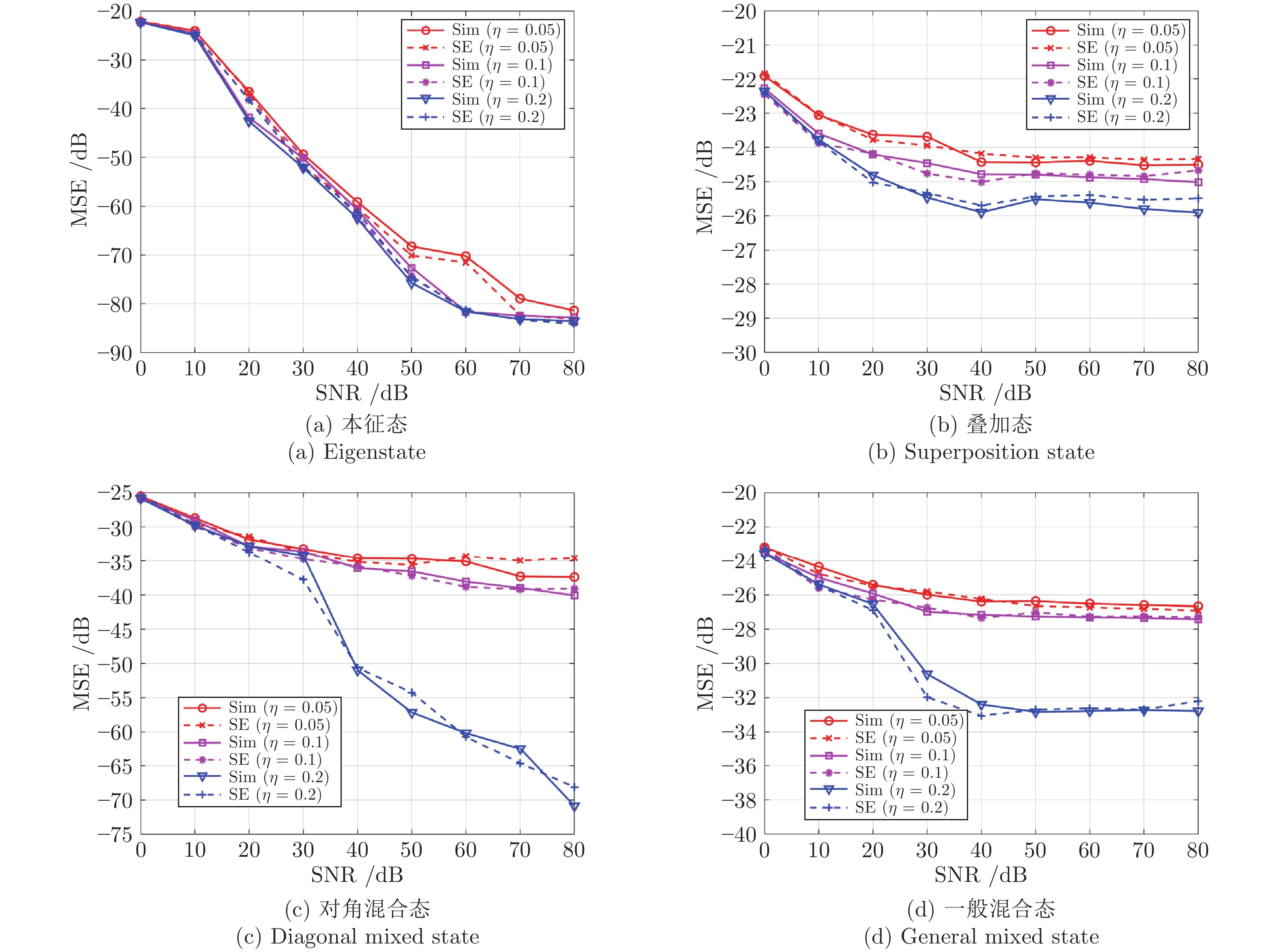
设计出一种基于学习去噪的近似消息传递(Learned denoising-based approximate message passing, LDAMP)的深度学习网络, 将其应用于量子状态的估计. 该网络将去噪卷积神经网络与基于去噪的近似消息传递算法相结合, 利用量子系统输出的测量值作为网络输入, 通过设计出的带有去噪卷积神经网络的LDAMP网络重构出原始密度矩阵, 从大量的训练样本中提取各种不同类型密度矩阵的结构特征, 来实现对量子本征态、叠加态以及混合态的估计. 在对4个量子位的量子态估计的具体实例中, 分别在无和有测量噪声干扰情况下, 对基于LDAMP网络的量子态估计进行了仿真实验性能研究, 并与基于压缩感知的交替方向乘子法和三维块匹配近似消息传递等算法进行估计性能对比研究. 数值仿真实验结果表明, 所设计的LDAMP网络可以在较少的测量的采样率下, 同时完成对4种量子态的更高精度估计.
设计出一种基于学习去噪的近似消息传递(Learned denoising-based approximate message passing, LDAMP)的深度学习网络, 将其应用于量子状态的估计. 该网络将去噪卷积神经网络与基于去噪的近似消息传递算法相结合, 利用量子系统输出的测量值作为网络输入, 通过设计出的带有去噪卷积神经网络的LDAMP网络重构出原始密度矩阵, 从大量的训练样本中提取各种不同类型密度矩阵的结构特征, 来实现对量子本征态、叠加态以及混合态的估计. 在对4个量子位的量子态估计的具体实例中, 分别在无和有测量噪声干扰情况下, 对基于LDAMP网络的量子态估计进行了仿真实验性能研究, 并与基于压缩感知的交替方向乘子法和三维块匹配近似消息传递等算法进行估计性能对比研究. 数值仿真实验结果表明, 所设计的LDAMP网络可以在较少的测量的采样率下, 同时完成对4种量子态的更高精度估计.


2023, 49(1): 91-101.
doi: 10.16383/j.aas.c220378
摘要:
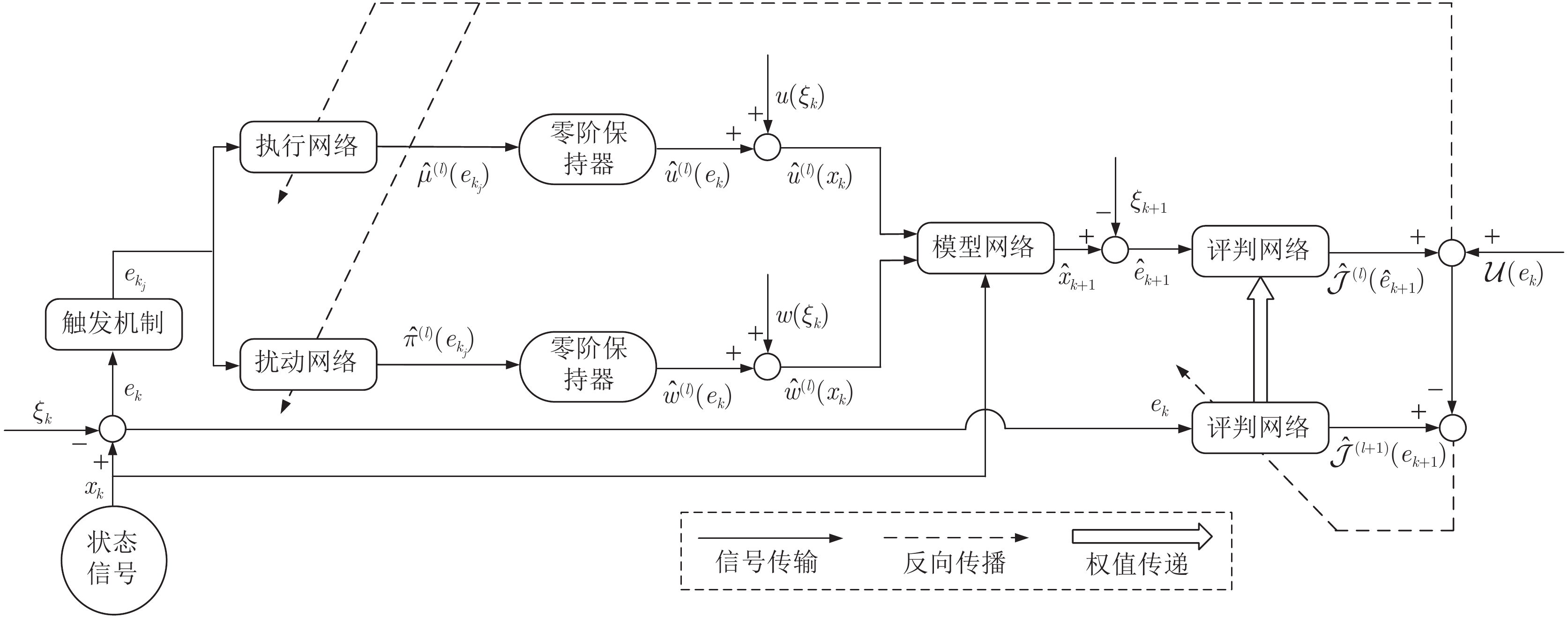
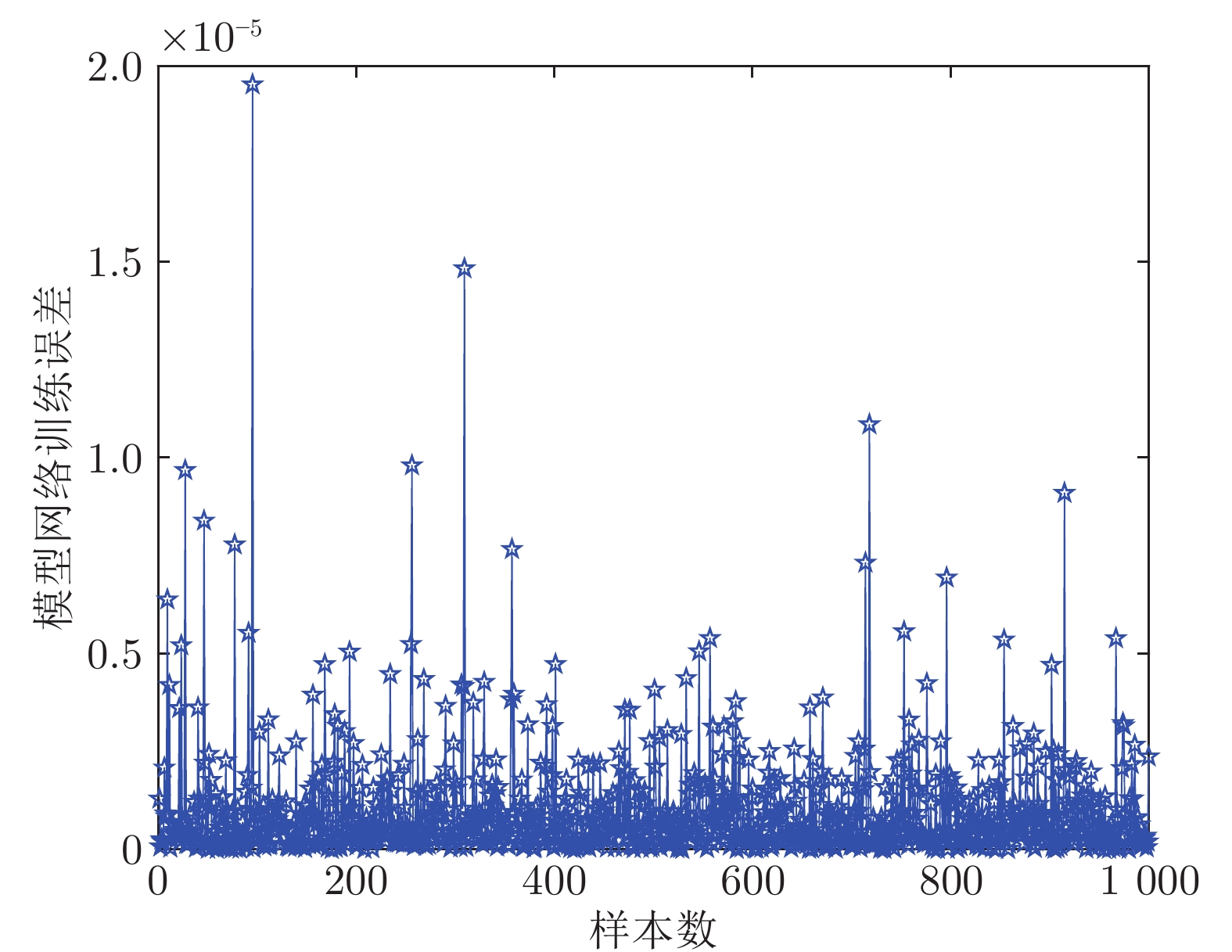
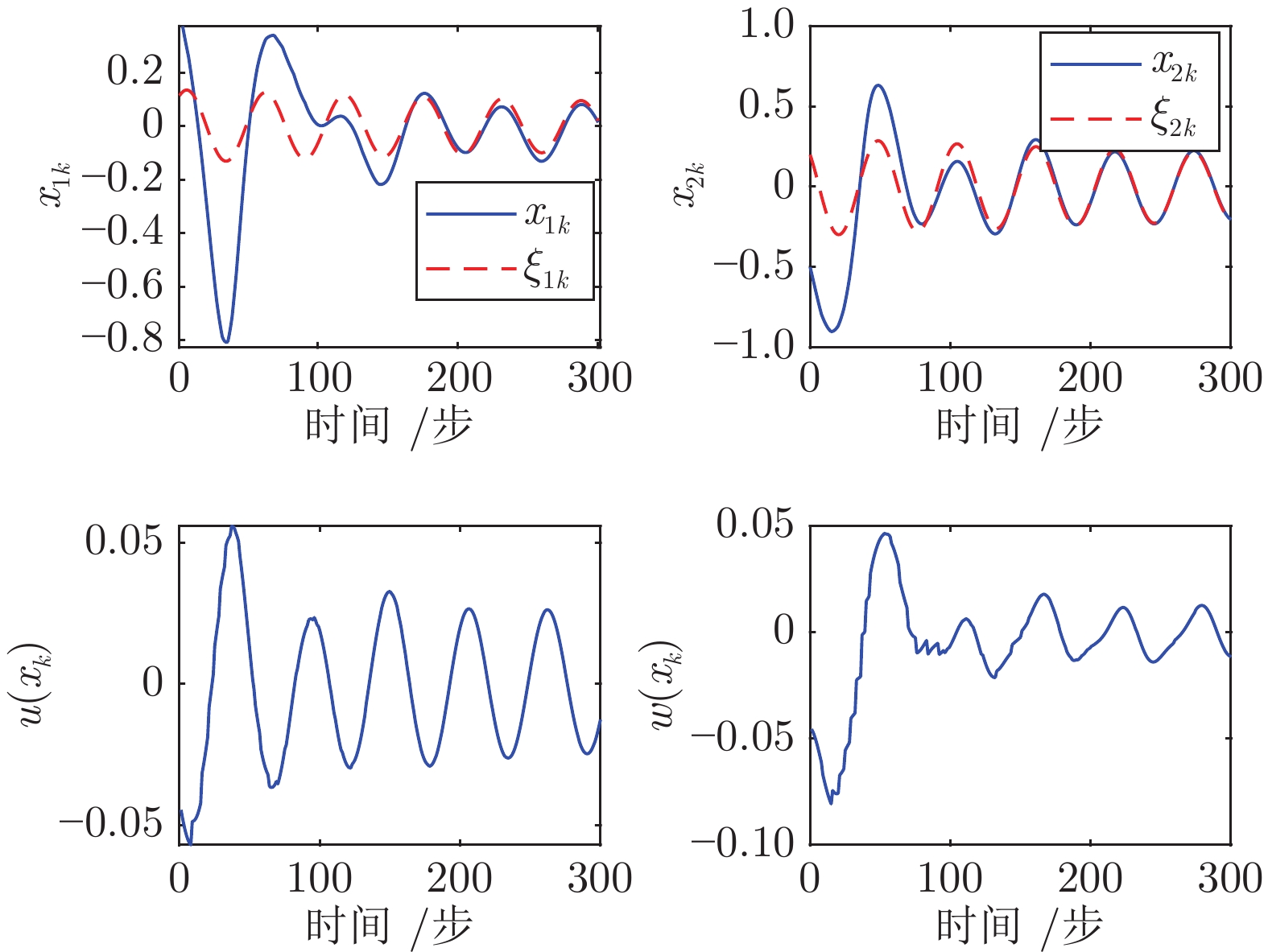
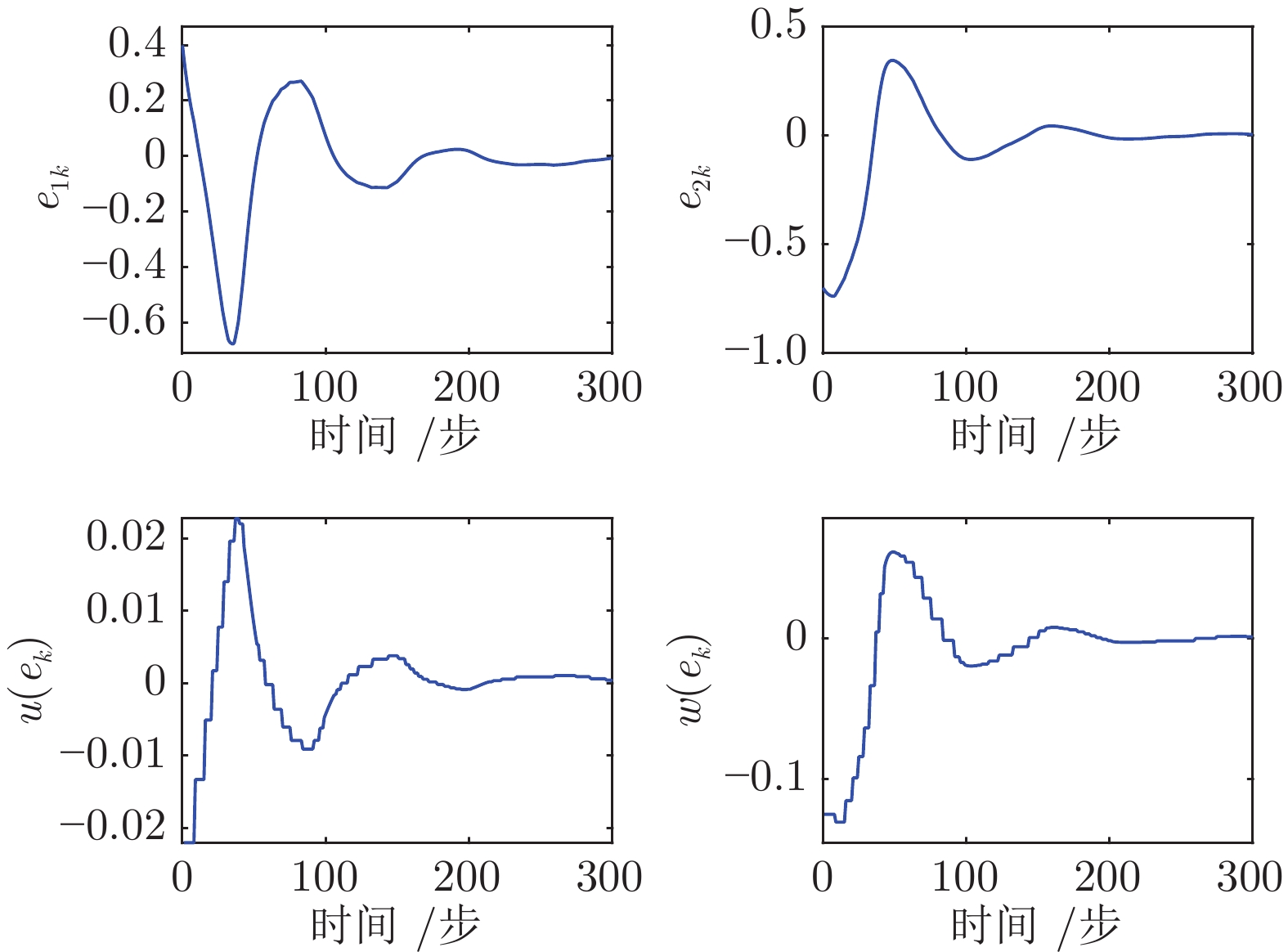
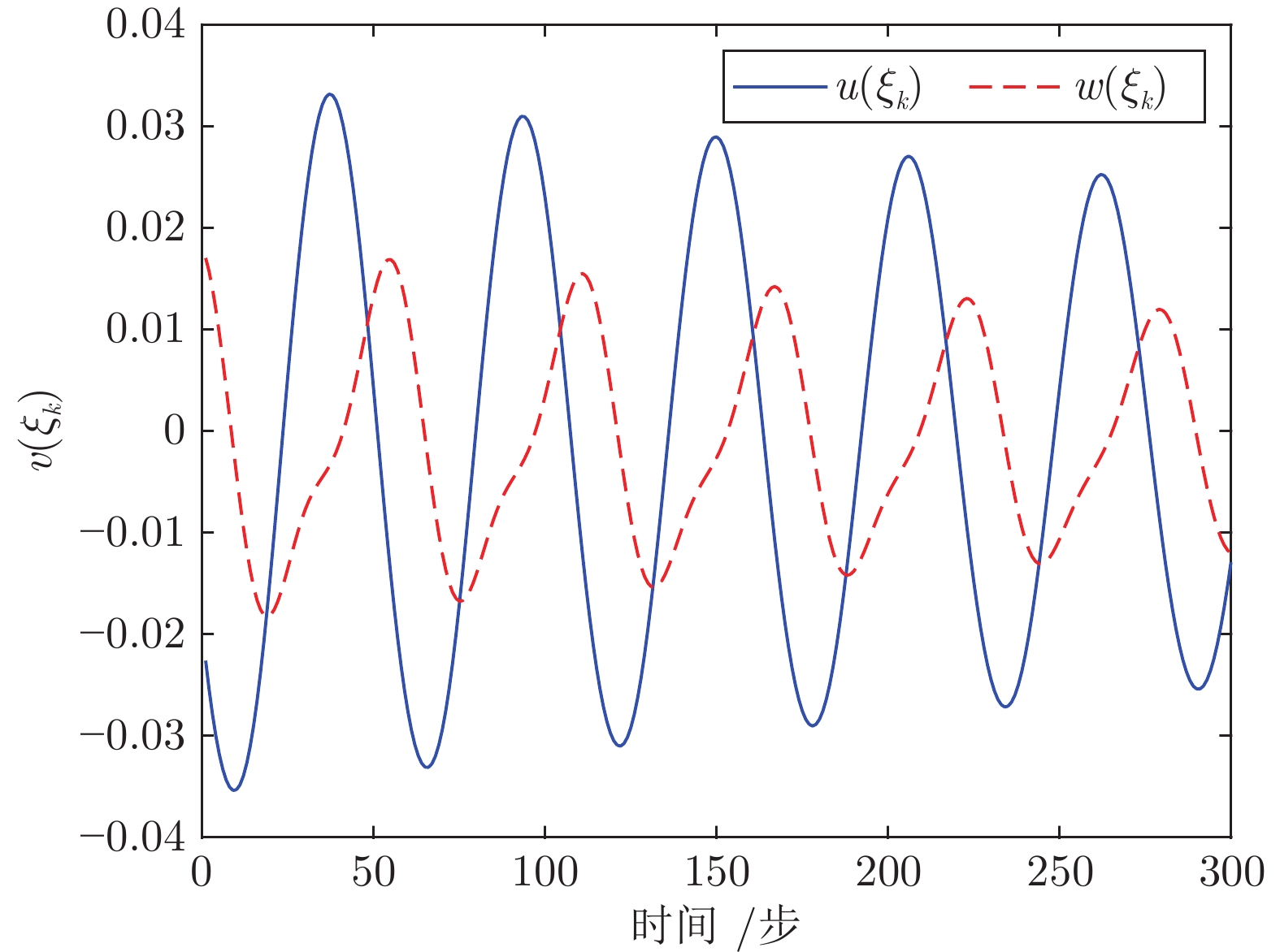
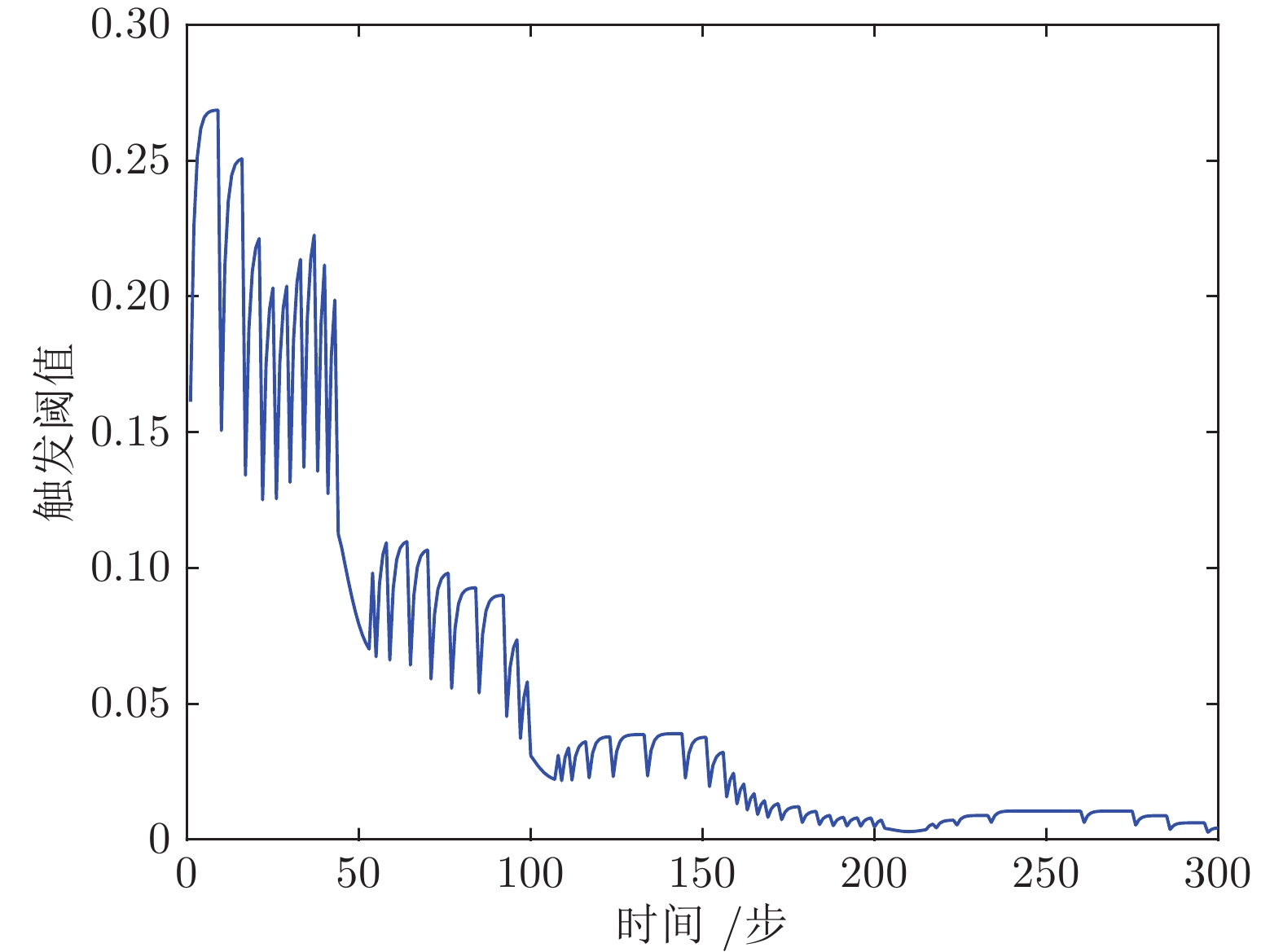
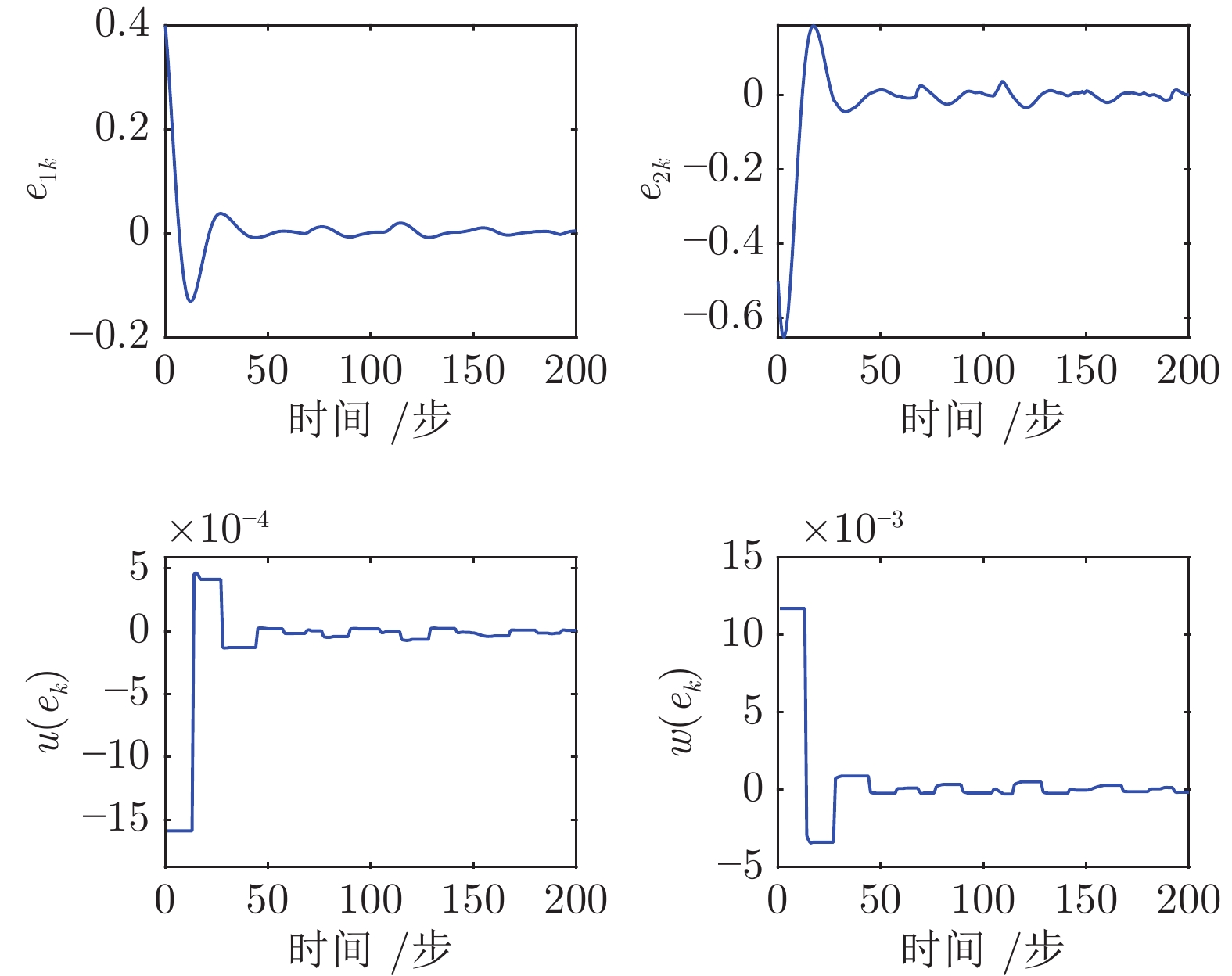
设计了一种基于事件的迭代自适应评判算法, 用于解决一类非仿射系统的零和博弈最优跟踪控制问题. 通过数值求解方法得到参考轨迹的稳定控制, 进而将未知非线性系统的零和博弈最优跟踪控制问题转化为误差系统的最优调节问题. 为了保证闭环系统在具有良好控制性能的基础上有效地提高资源利用率, 引入一个合适的事件触发条件来获得阶段性更新的跟踪策略对. 然后, 根据设计的触发条件, 采用Lyapunov方法证明误差系统的渐近稳定性. 接着, 通过构建四个神经网络, 来促进所提算法的实现. 为了提高目标轨迹对应稳定控制的精度, 采用模型网络直接逼近未知系统函数而不是误差动态系统. 构建评判网络、执行网络和扰动网络用于近似迭代代价函数和迭代跟踪策略对. 最后, 通过两个仿真实例, 验证该控制方法的可行性和有效性.
设计了一种基于事件的迭代自适应评判算法, 用于解决一类非仿射系统的零和博弈最优跟踪控制问题. 通过数值求解方法得到参考轨迹的稳定控制, 进而将未知非线性系统的零和博弈最优跟踪控制问题转化为误差系统的最优调节问题. 为了保证闭环系统在具有良好控制性能的基础上有效地提高资源利用率, 引入一个合适的事件触发条件来获得阶段性更新的跟踪策略对. 然后, 根据设计的触发条件, 采用Lyapunov方法证明误差系统的渐近稳定性. 接着, 通过构建四个神经网络, 来促进所提算法的实现. 为了提高目标轨迹对应稳定控制的精度, 采用模型网络直接逼近未知系统函数而不是误差动态系统. 构建评判网络、执行网络和扰动网络用于近似迭代代价函数和迭代跟踪策略对. 最后, 通过两个仿真实例, 验证该控制方法的可行性和有效性.



2023, 49(1): 102-110.
doi: 10.16383/j.aas.c200665
摘要:
针对基于互学习的知识蒸馏方法中存在模型只关注教师网络和学生网络的分布差异, 而没有考虑其他的约束条件, 只关注了结果导向的监督, 而缺少过程导向监督的不足, 提出了一种拓扑一致性指导的对抗互学习知识蒸馏方法(Topology-guided adversarial deep mutual learning, TADML). 该方法将教师网络和学生网络同时训练, 网络之间相互指导学习, 不仅采用网络输出的类分布之间的差异, 还设计了网络中间特征的拓扑性差异度量. 训练过程采用对抗训练, 进一步提高教师网络和学生网络的判别性. 在分类数据集CIFAR10、CIFAR100和Tiny-ImageNet及行人重识别数据集Market1501上的实验结果表明了TADML的有效性, TADML取得了同类模型压缩方法中最好的效果.
针对基于互学习的知识蒸馏方法中存在模型只关注教师网络和学生网络的分布差异, 而没有考虑其他的约束条件, 只关注了结果导向的监督, 而缺少过程导向监督的不足, 提出了一种拓扑一致性指导的对抗互学习知识蒸馏方法(Topology-guided adversarial deep mutual learning, TADML). 该方法将教师网络和学生网络同时训练, 网络之间相互指导学习, 不仅采用网络输出的类分布之间的差异, 还设计了网络中间特征的拓扑性差异度量. 训练过程采用对抗训练, 进一步提高教师网络和学生网络的判别性. 在分类数据集CIFAR10、CIFAR100和Tiny-ImageNet及行人重识别数据集Market1501上的实验结果表明了TADML的有效性, TADML取得了同类模型压缩方法中最好的效果.


2023, 49(1): 111-121.
doi: 10.16383/j.aas.c211062
摘要:
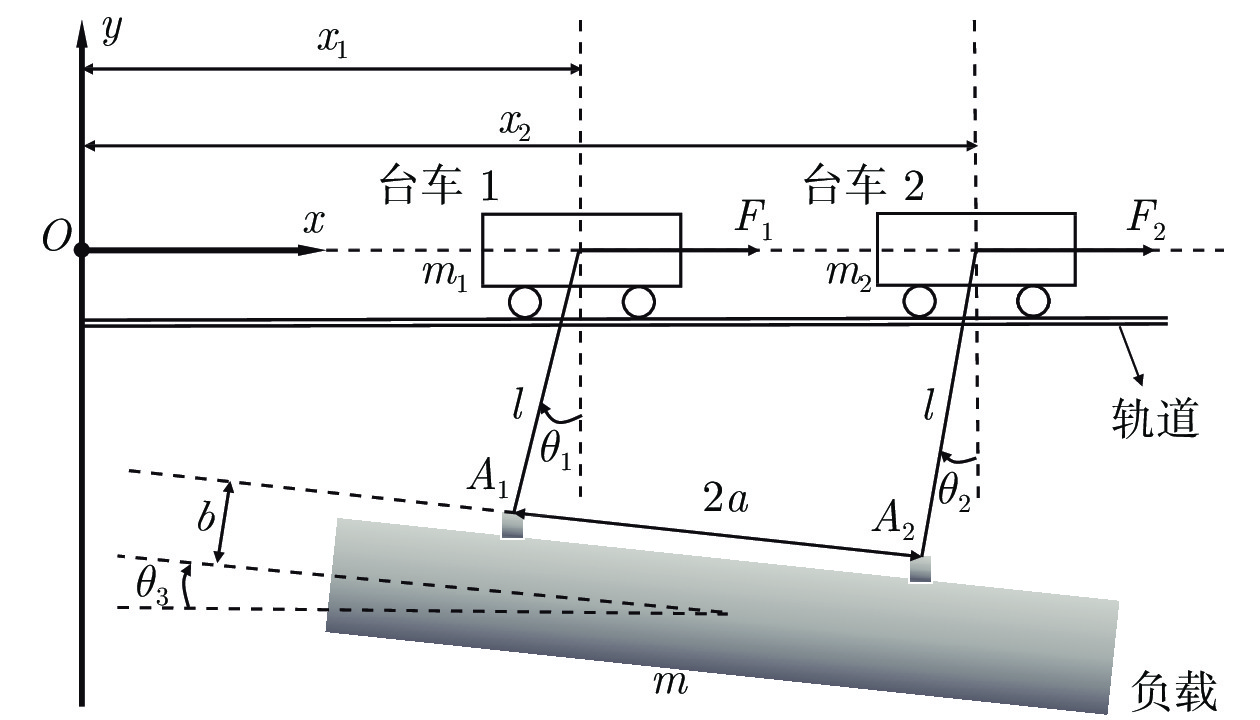
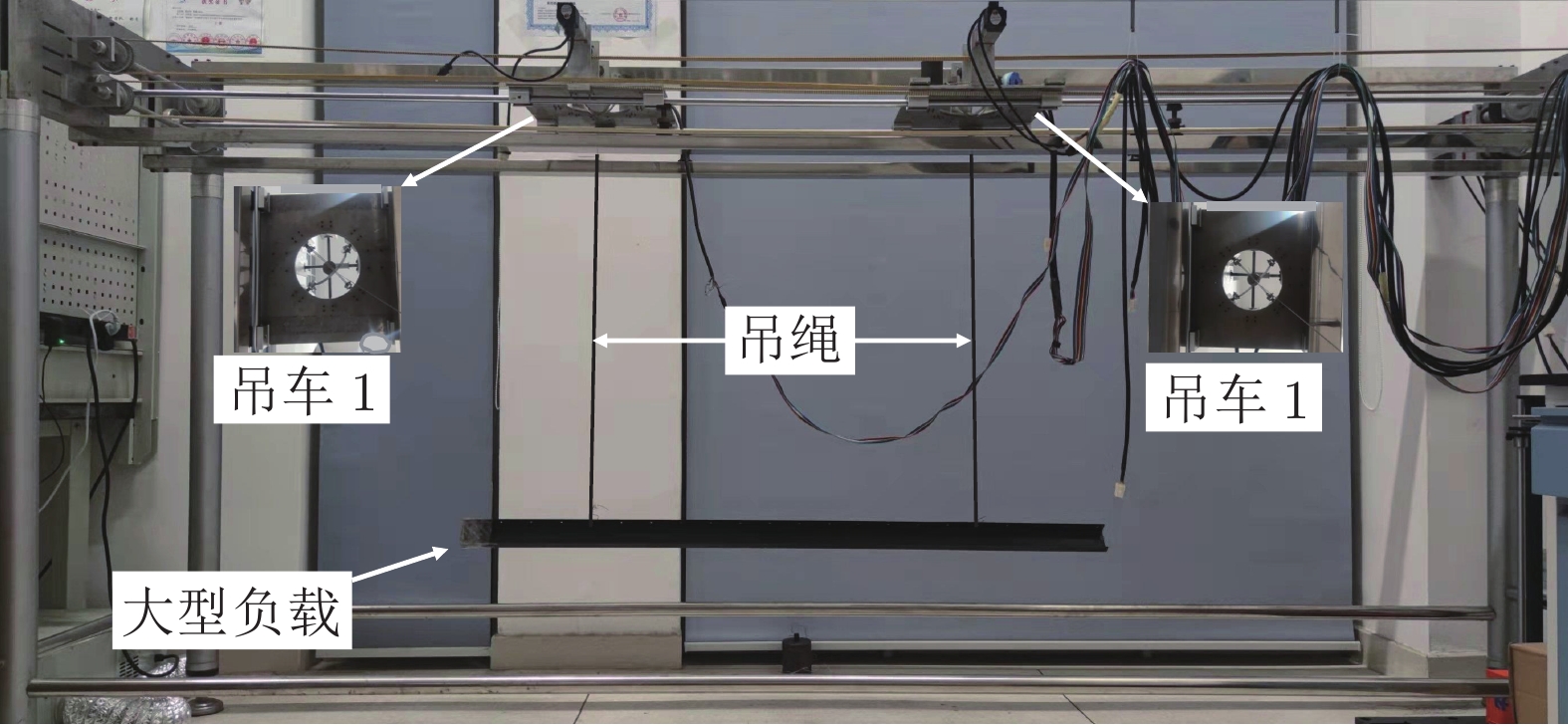
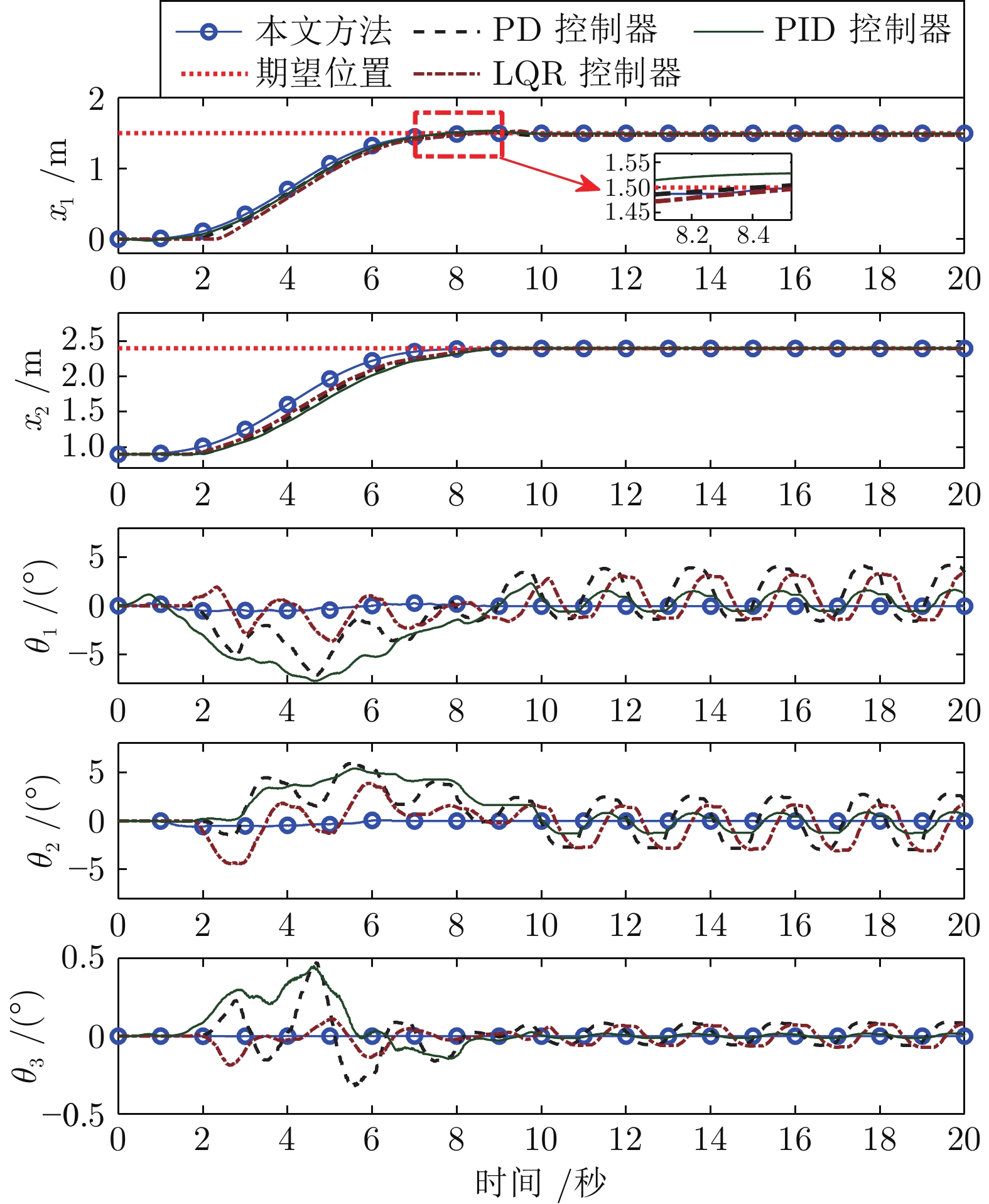
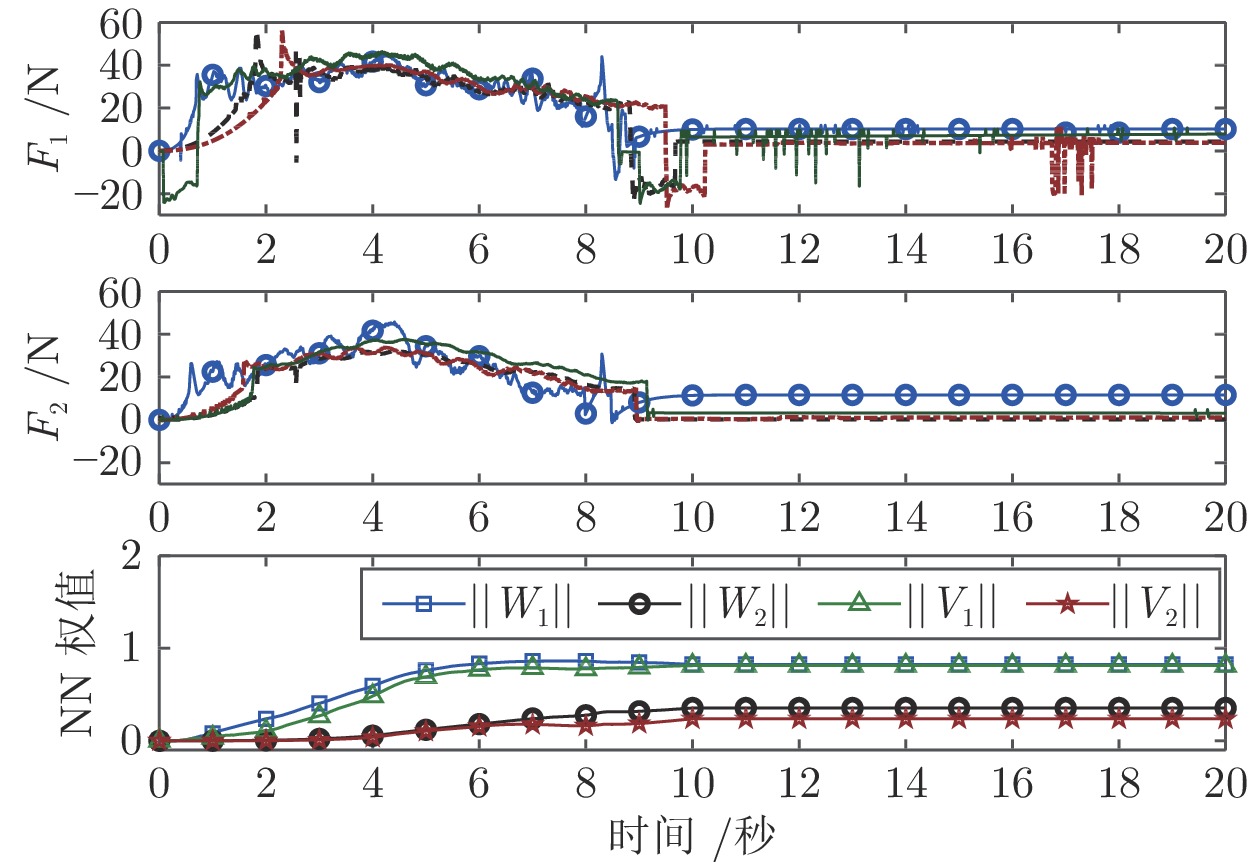
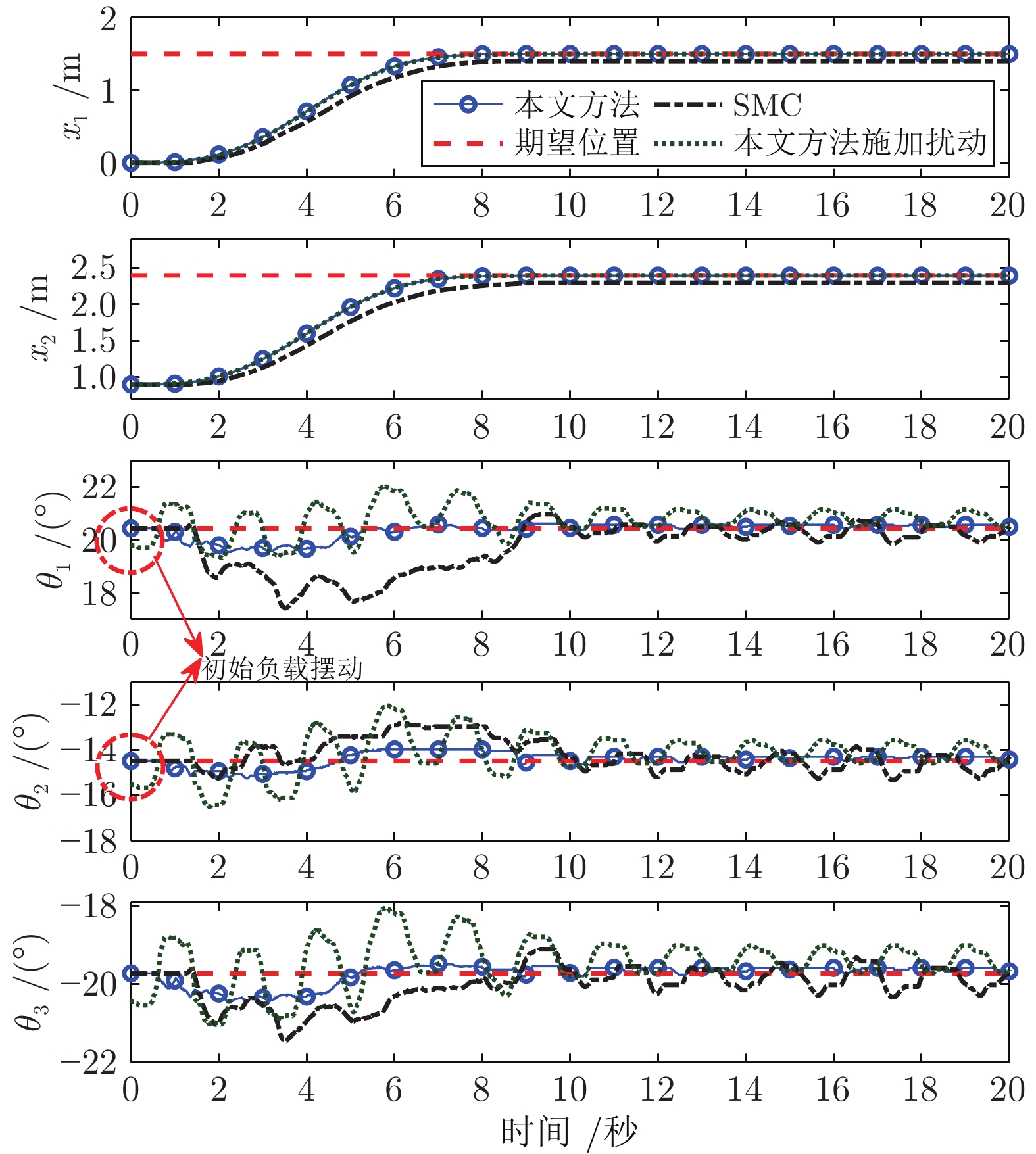
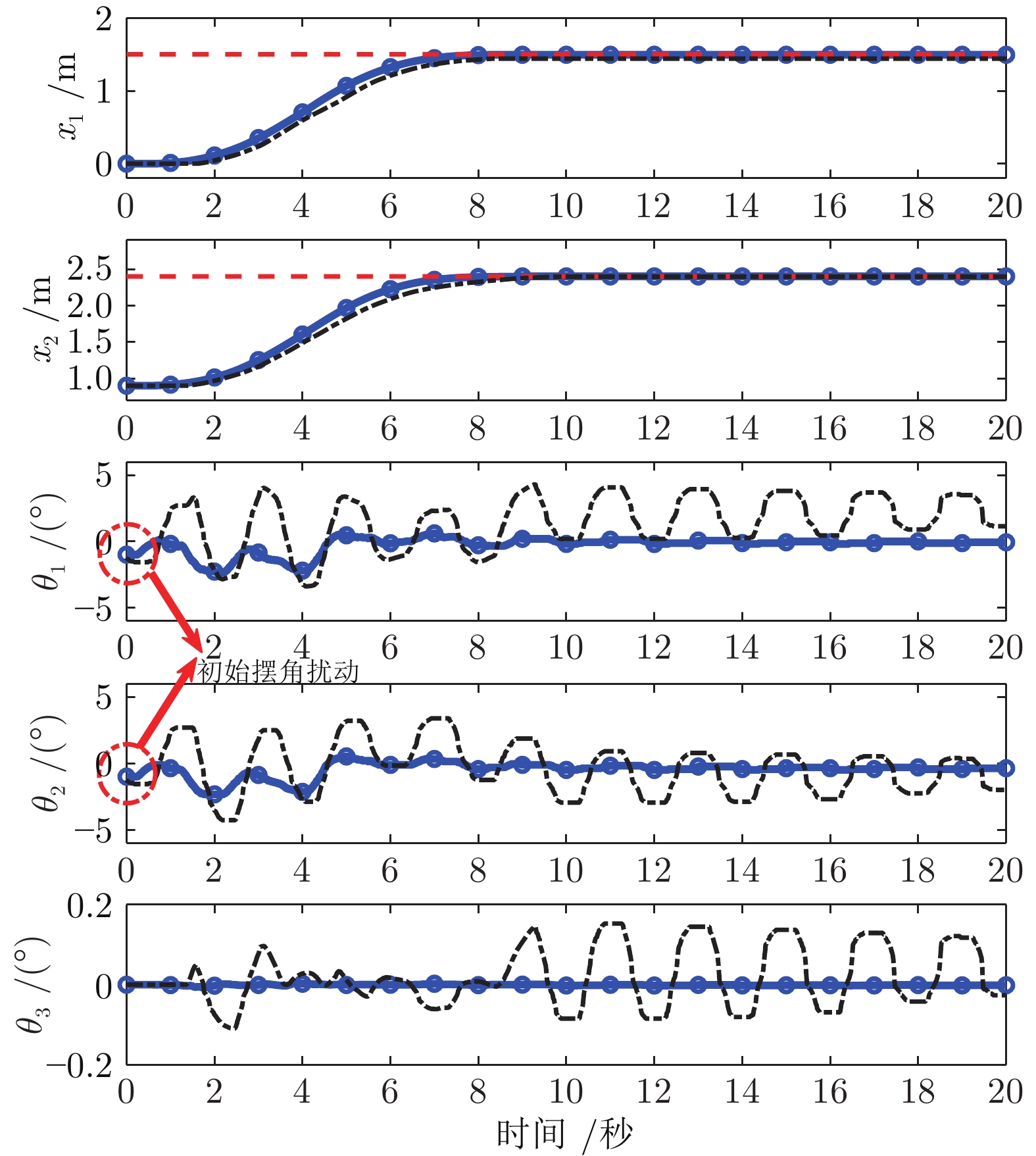
由于工业实践对运输能力提出了更高的要求, 双吊车的应用日益广泛. 然而其动力学模型非线性很强, 因此控制器结构十分复杂. 另一方面, 大型货物的摆动很难抑制, 这给双吊车的自动化带来了巨大的挑战. 为了处理以上问题, 首先, 采用神经网络准确地估计了系统的模型, 在此基础上提出了一种自适应防摆控制方法, 很好地实现了双吊车系统的防摆控制; 然后, 采用李雅普诺夫方法, 严格地证明了系统在平衡点的渐近稳定性; 最后, 通过大量的实验结果, 验证了该方法具有良好的性能.
由于工业实践对运输能力提出了更高的要求, 双吊车的应用日益广泛. 然而其动力学模型非线性很强, 因此控制器结构十分复杂. 另一方面, 大型货物的摆动很难抑制, 这给双吊车的自动化带来了巨大的挑战. 为了处理以上问题, 首先, 采用神经网络准确地估计了系统的模型, 在此基础上提出了一种自适应防摆控制方法, 很好地实现了双吊车系统的防摆控制; 然后, 采用李雅普诺夫方法, 严格地证明了系统在平衡点的渐近稳定性; 最后, 通过大量的实验结果, 验证了该方法具有良好的性能.

2023, 49(1): 122-134.
doi: 10.16383/j.aas.c211210
摘要:
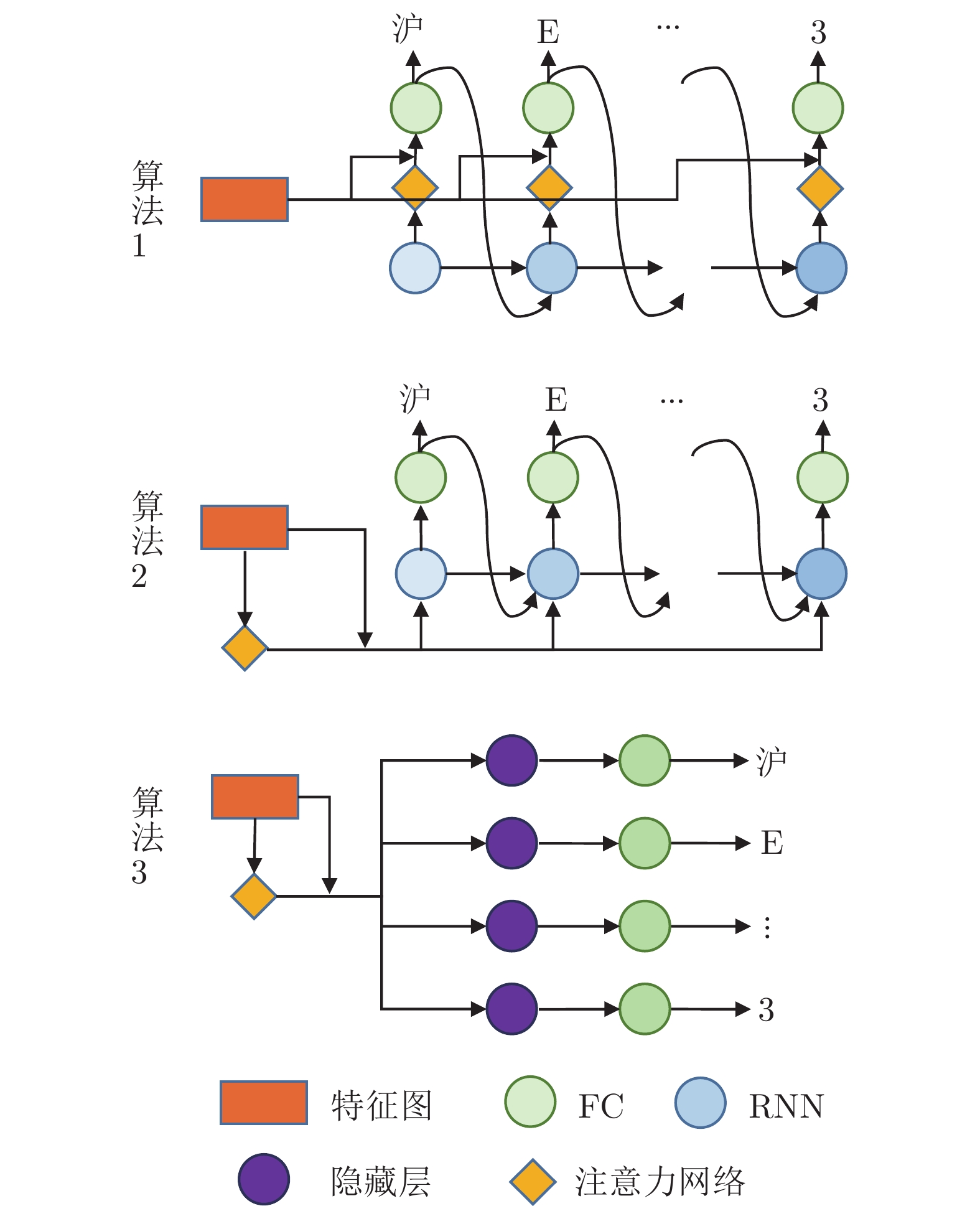
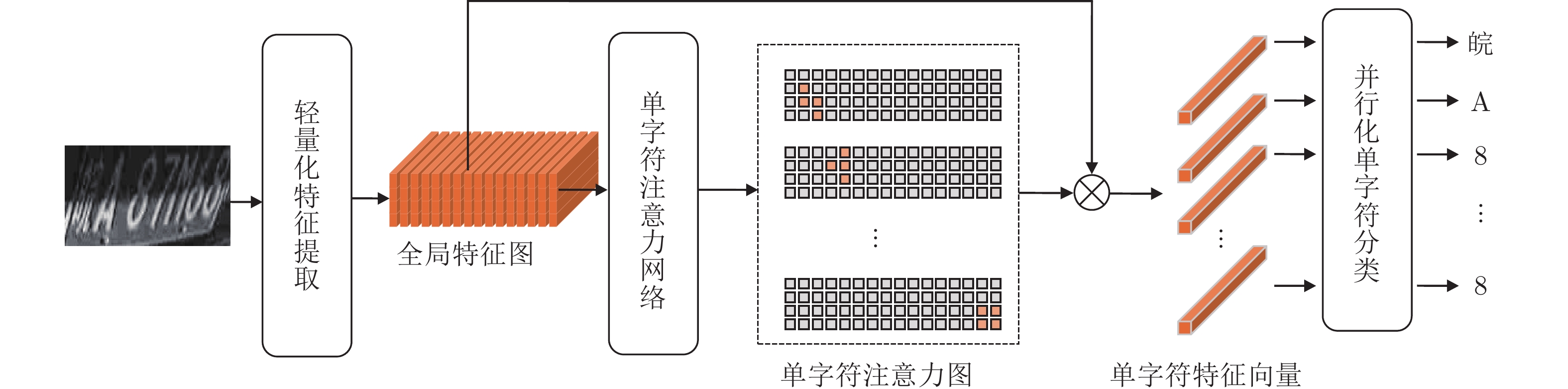
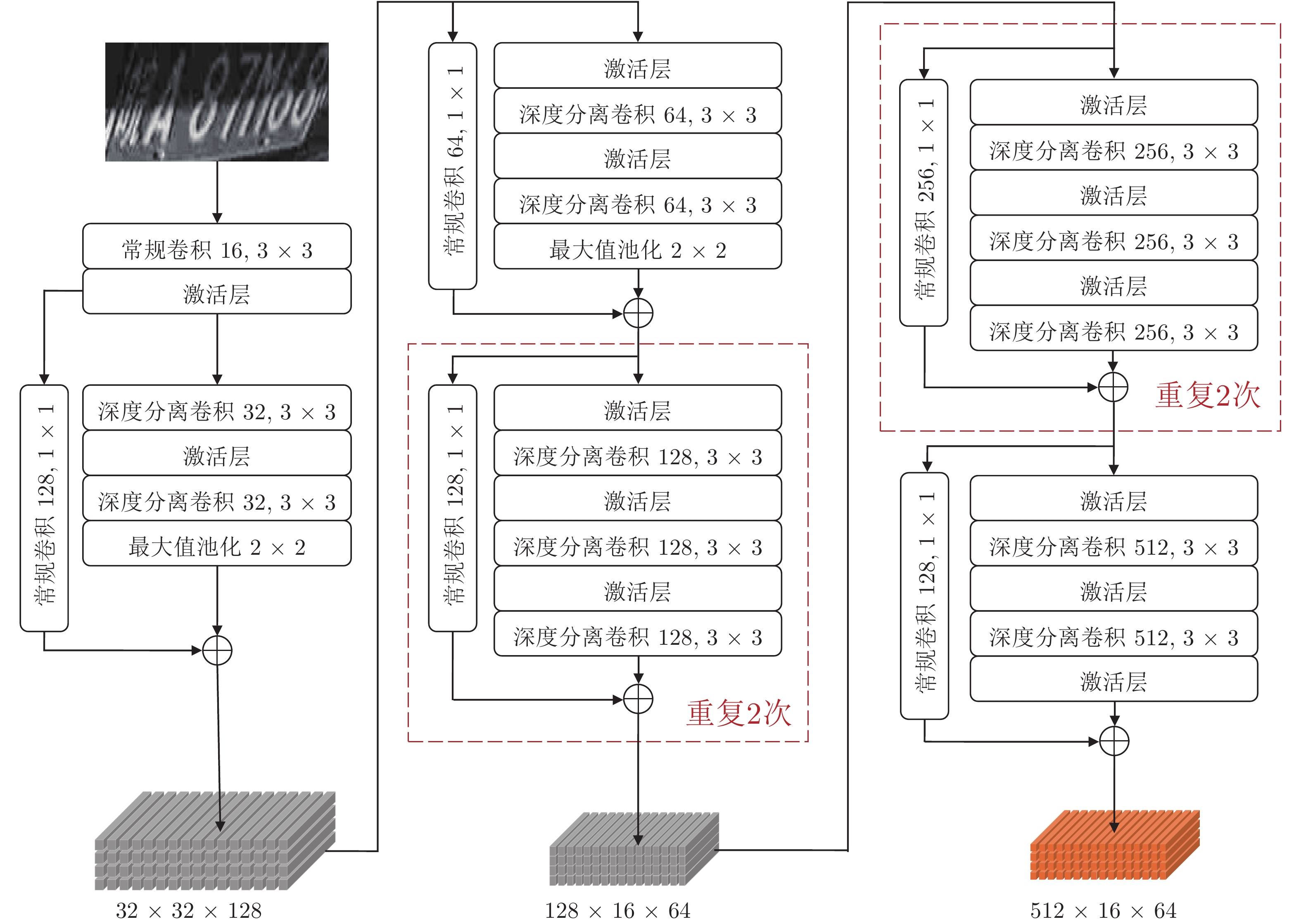
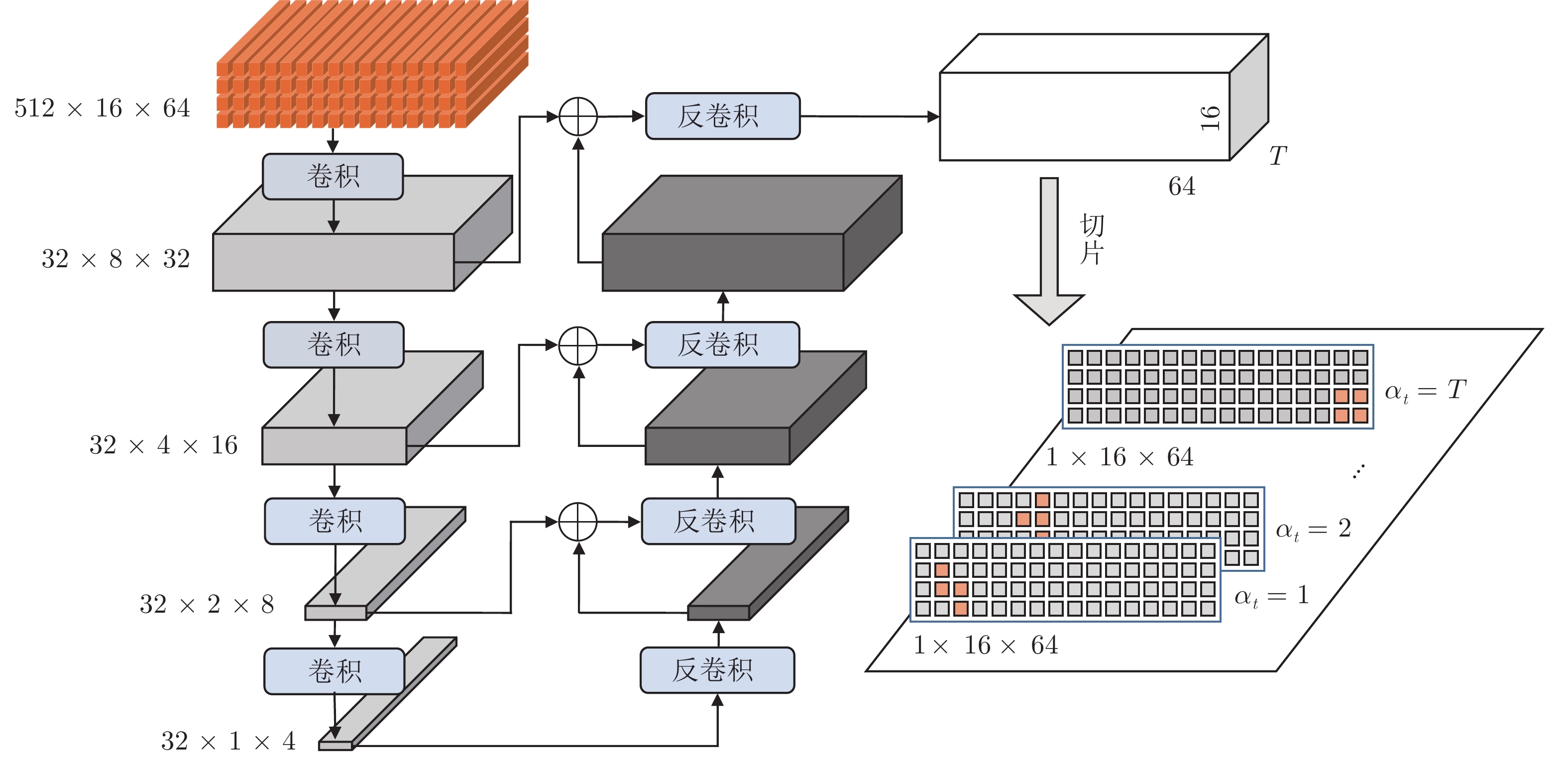
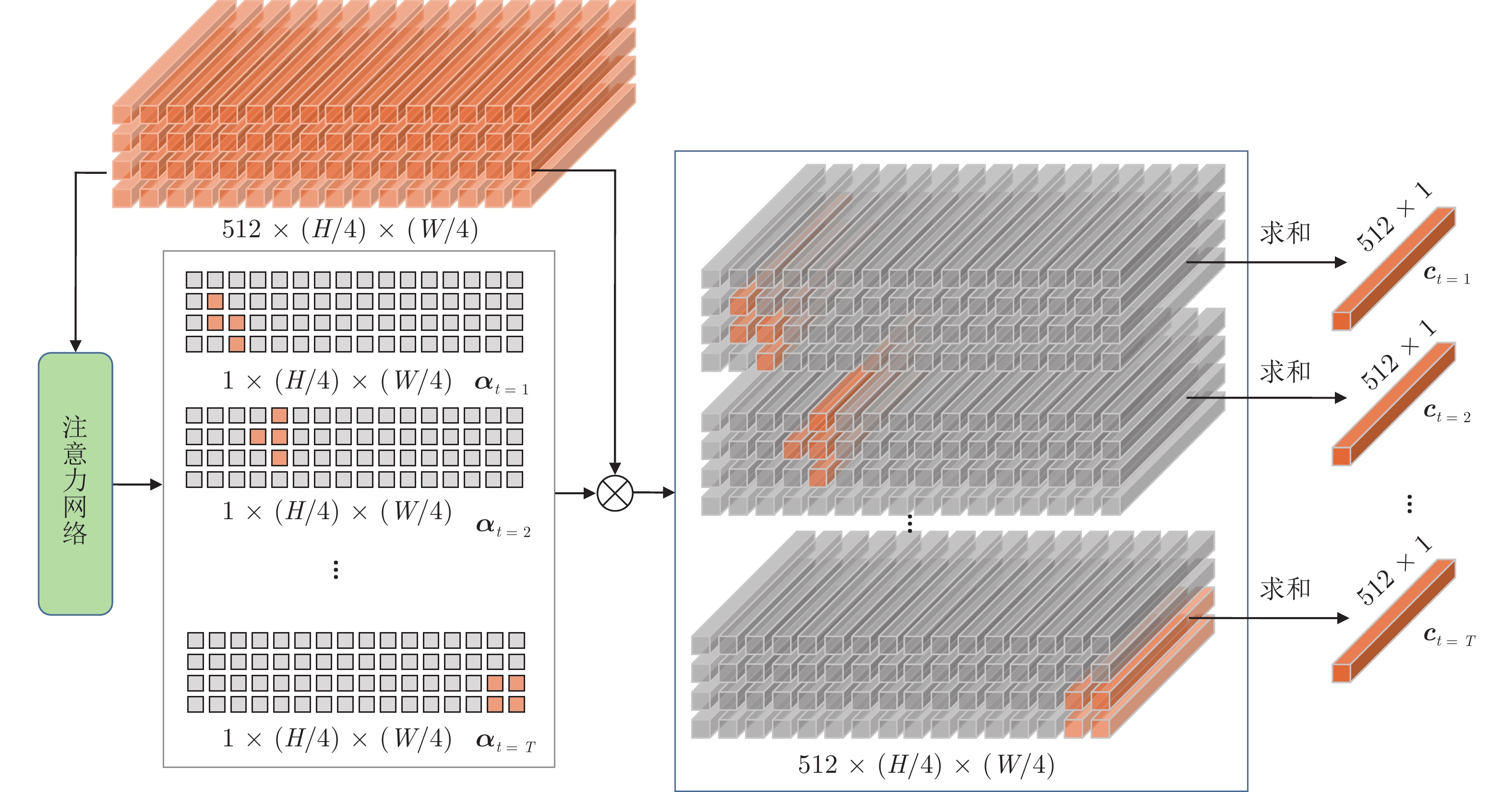
复杂场景下的高精度车牌识别仍然存在着许多挑战, 除了光照、分辨率不可控和运动模糊等因素导致的车牌图像质量低之外, 还包括车牌品类多样产生的行数不一和字数不一等困难, 以及因拍摄角度多样出现的大倾角等问题. 针对这些挑战, 提出了一种基于单字符注意力的场景鲁棒的高精度车牌识别算法, 在无单字符位置标签信息的情况下, 使用注意力机制对车牌全局特征图进行单字符级特征分割, 以处理多品类车牌和倾斜车牌中的二维字符布局问题. 另外, 该算法通过使用共享参数的多分支结构代替现有算法的串行解码结构, 降低了分类头参数量并实现了并行化推理. 实验结果表明, 该算法在公开车牌数据集上实现了超越现有算法的精度, 同时具有较快的识别速度.
复杂场景下的高精度车牌识别仍然存在着许多挑战, 除了光照、分辨率不可控和运动模糊等因素导致的车牌图像质量低之外, 还包括车牌品类多样产生的行数不一和字数不一等困难, 以及因拍摄角度多样出现的大倾角等问题. 针对这些挑战, 提出了一种基于单字符注意力的场景鲁棒的高精度车牌识别算法, 在无单字符位置标签信息的情况下, 使用注意力机制对车牌全局特征图进行单字符级特征分割, 以处理多品类车牌和倾斜车牌中的二维字符布局问题. 另外, 该算法通过使用共享参数的多分支结构代替现有算法的串行解码结构, 降低了分类头参数量并实现了并行化推理. 实验结果表明, 该算法在公开车牌数据集上实现了超越现有算法的精度, 同时具有较快的识别速度.





2023, 49(1): 135-147.
doi: 10.16383/j.aas.c210058
摘要:
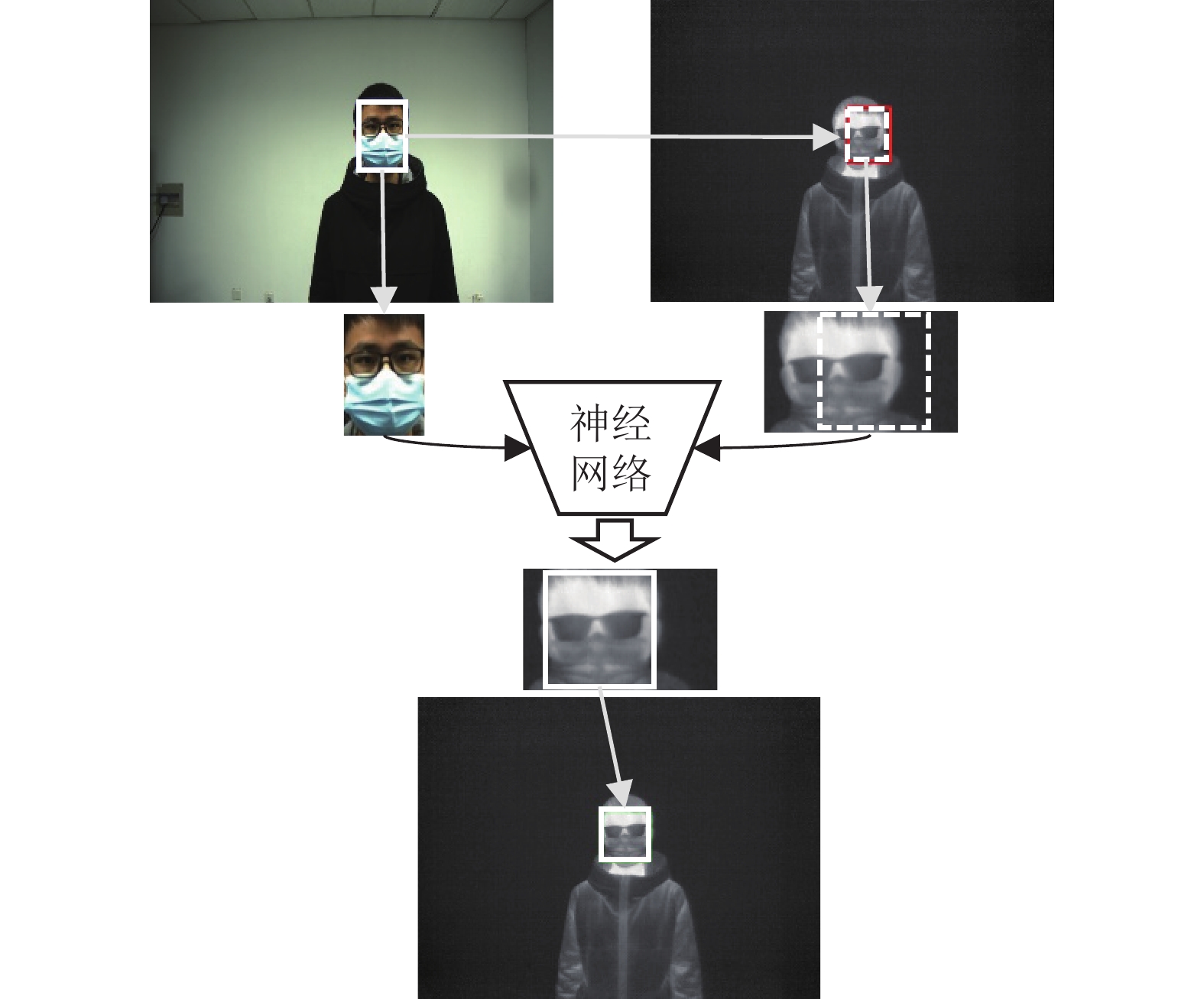
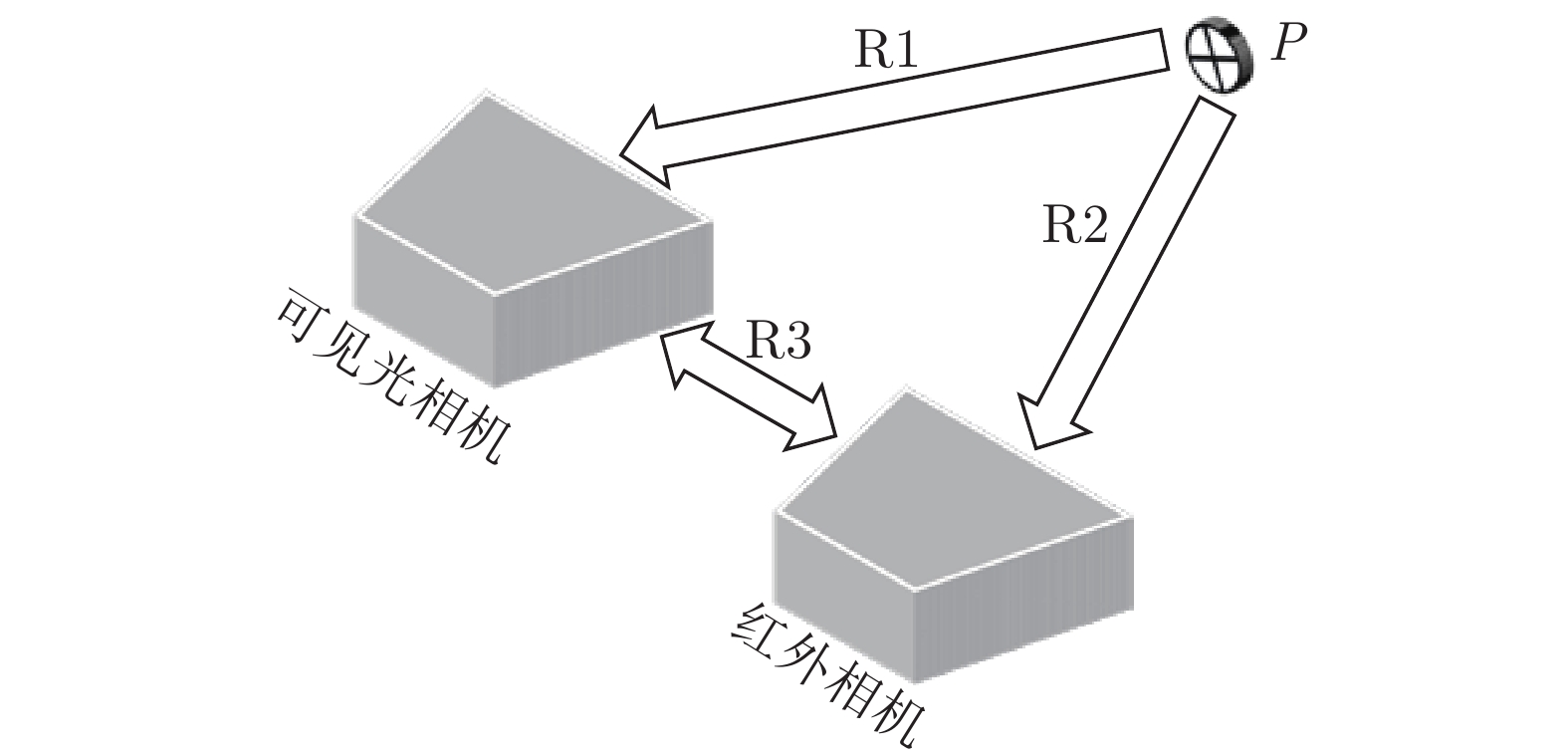
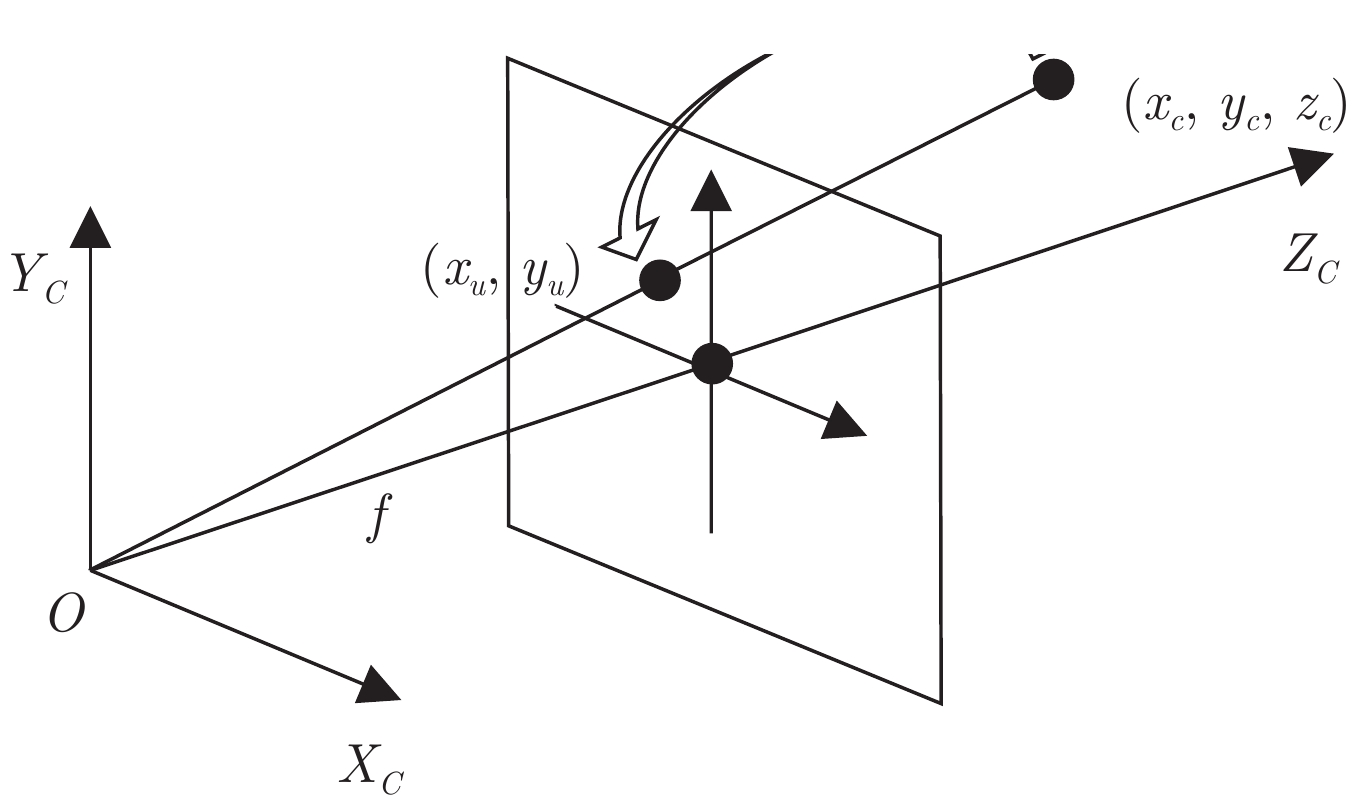
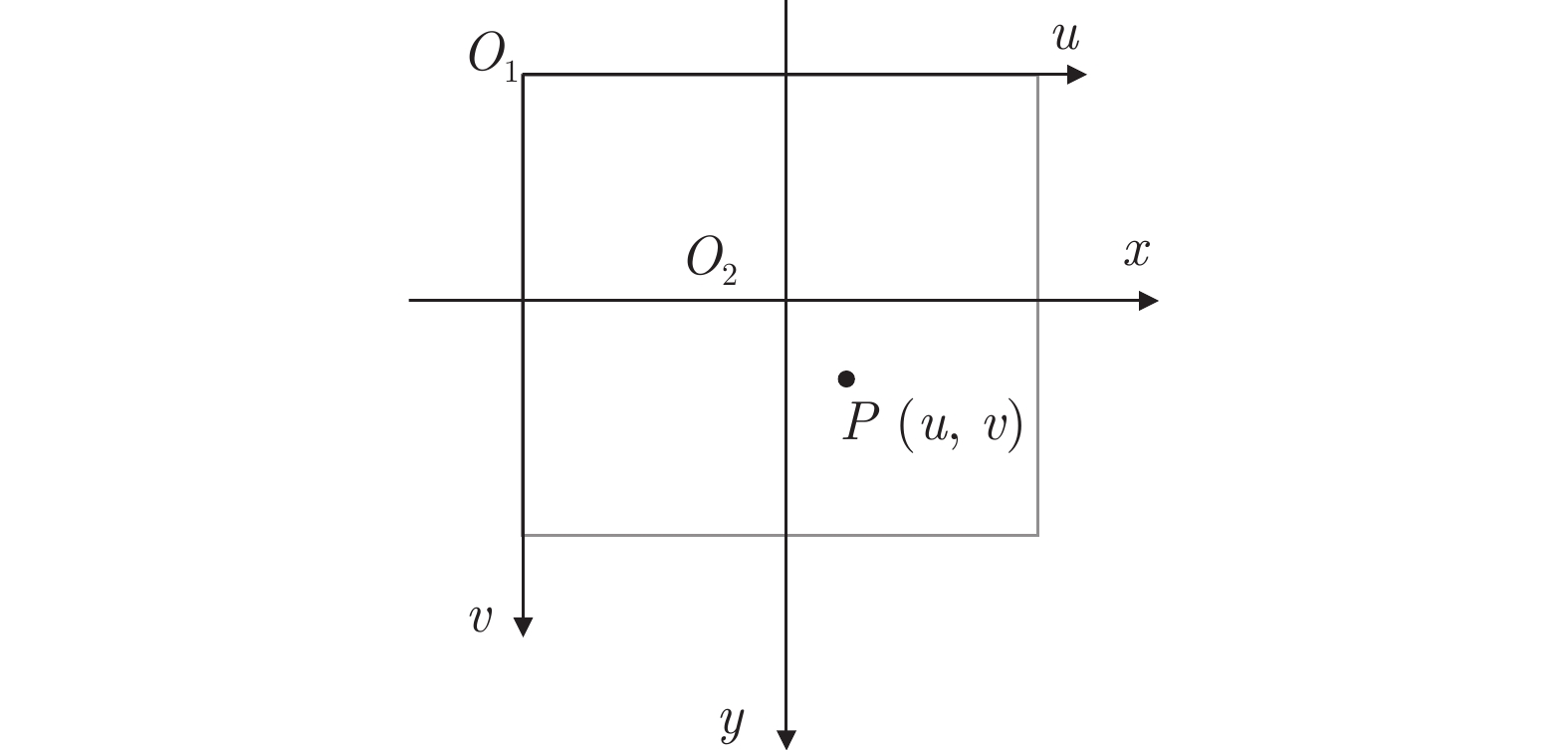
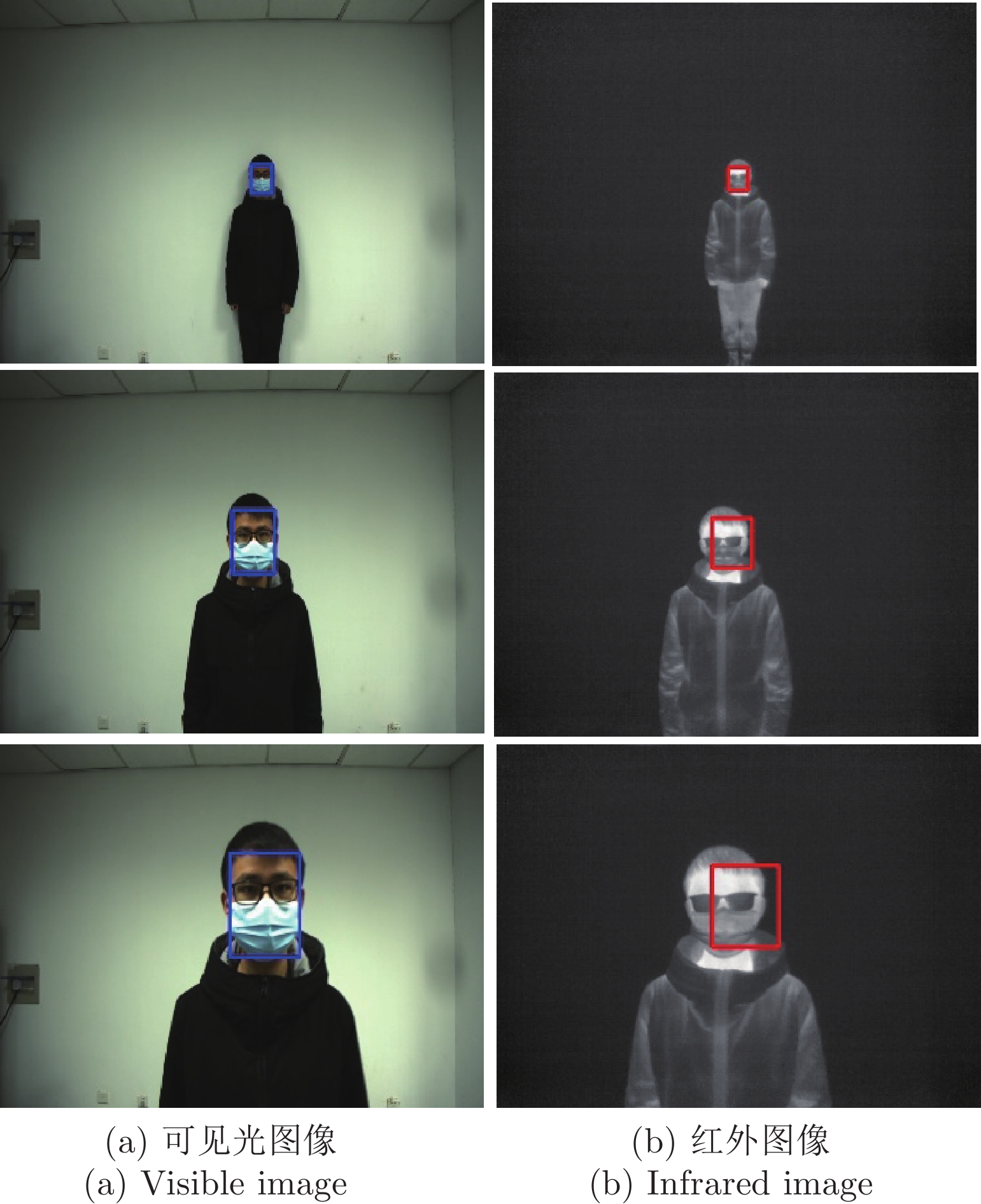
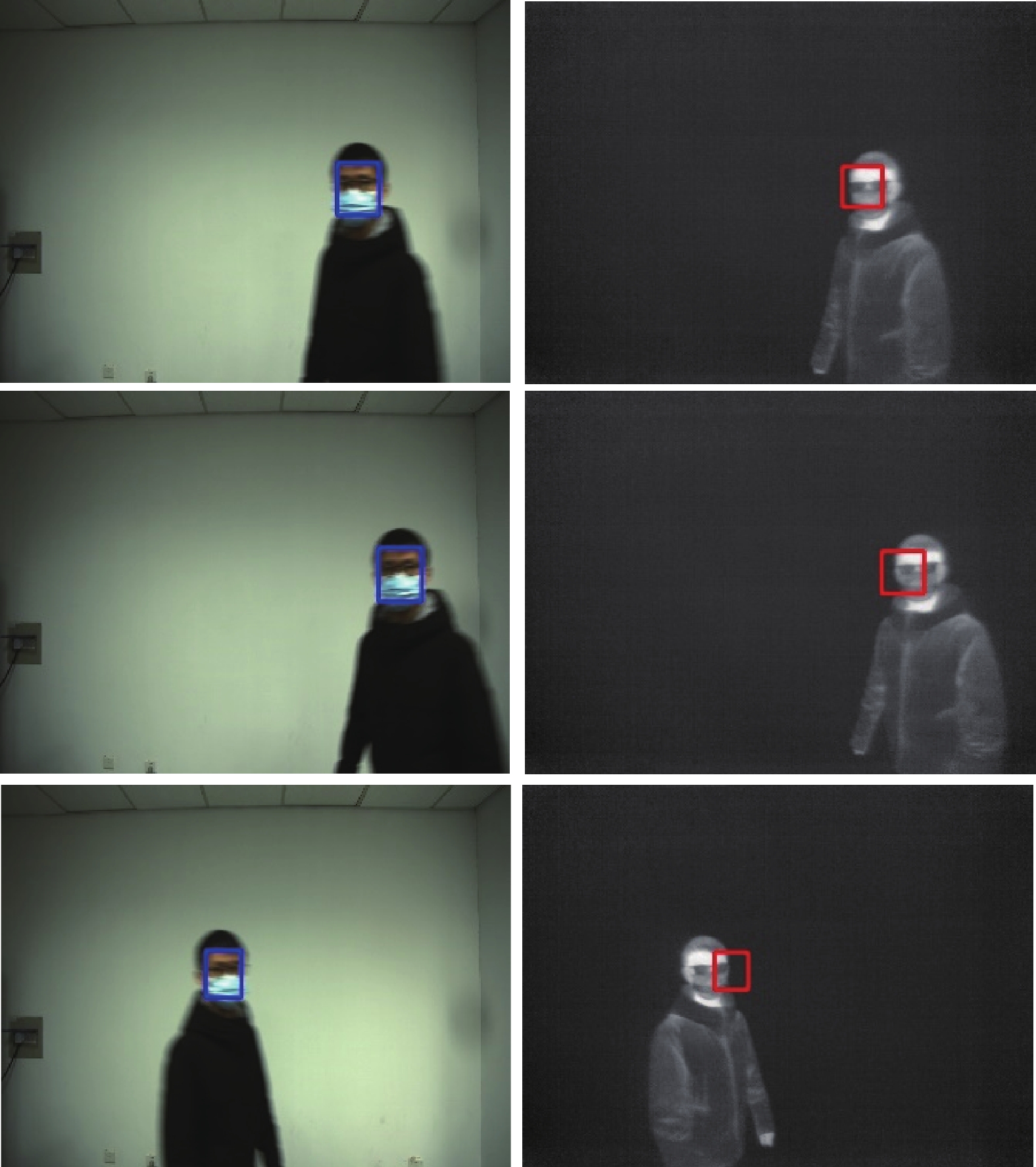
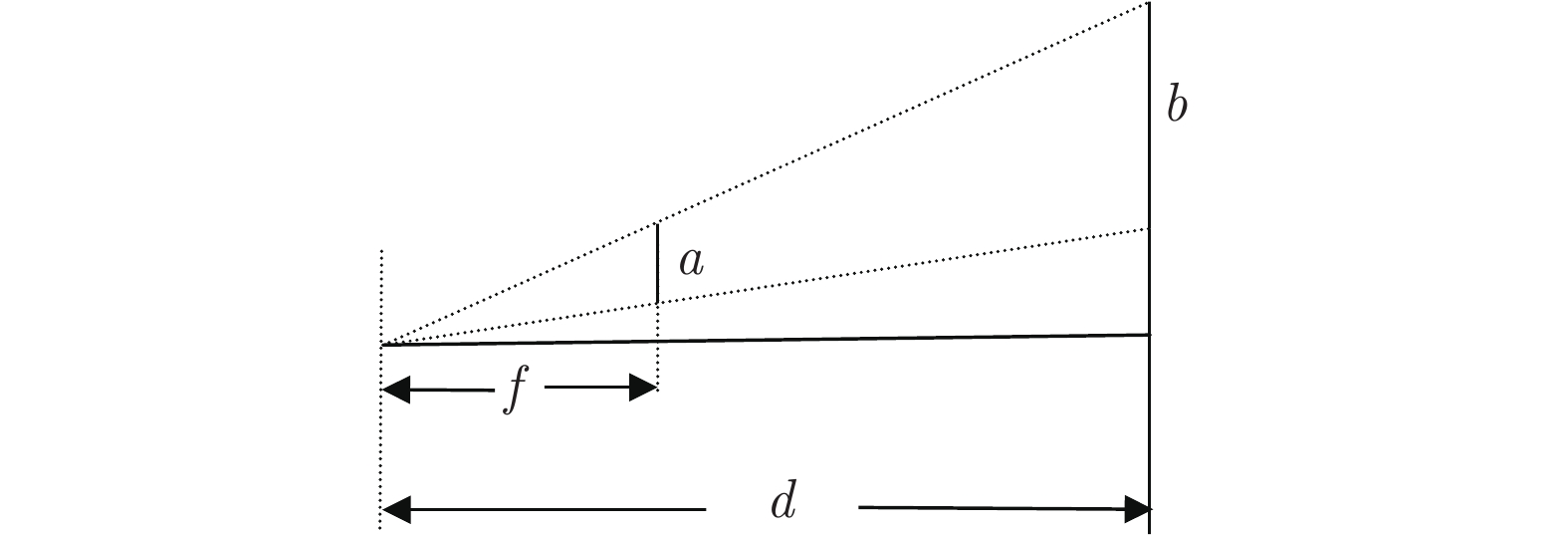
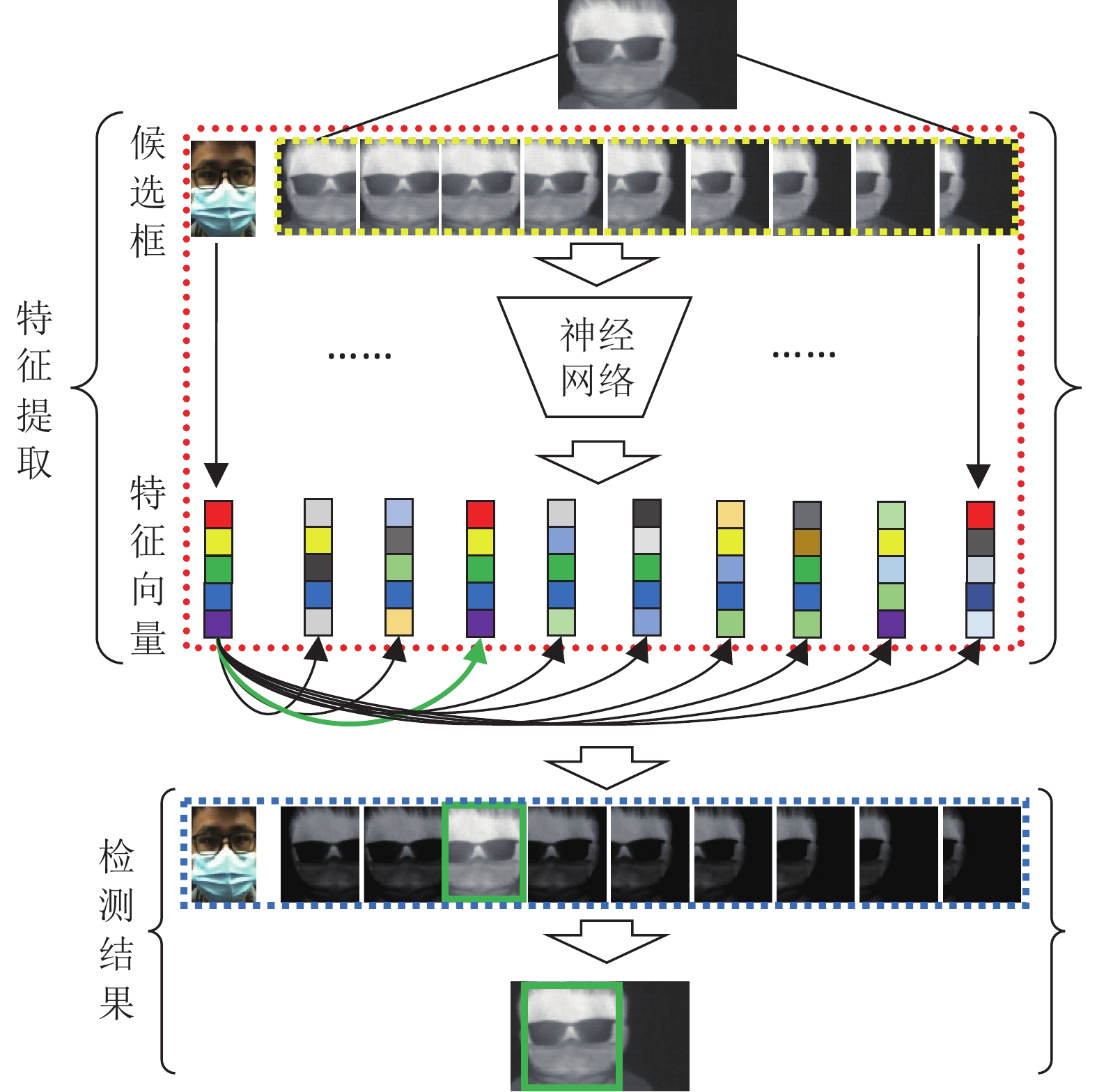
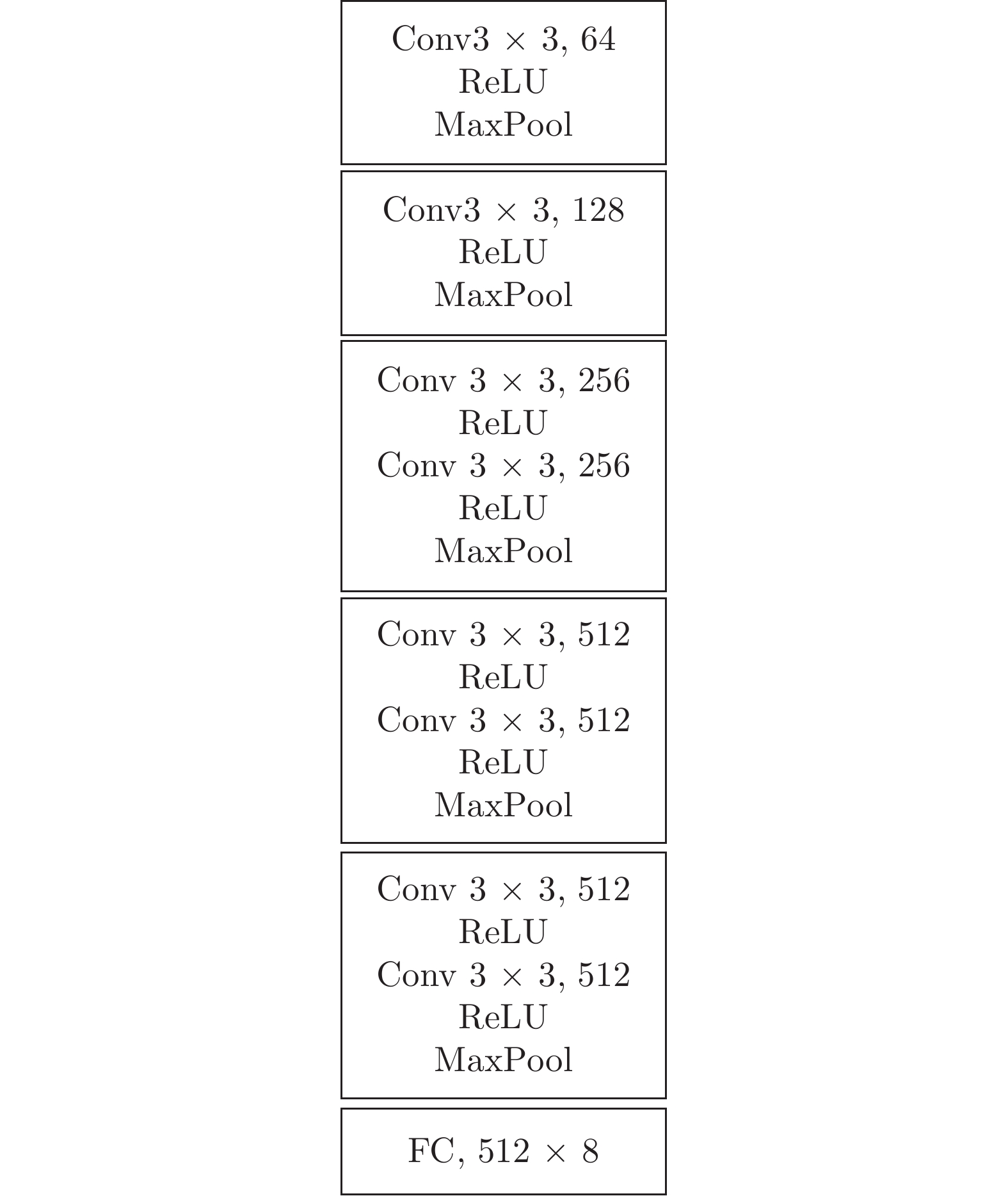
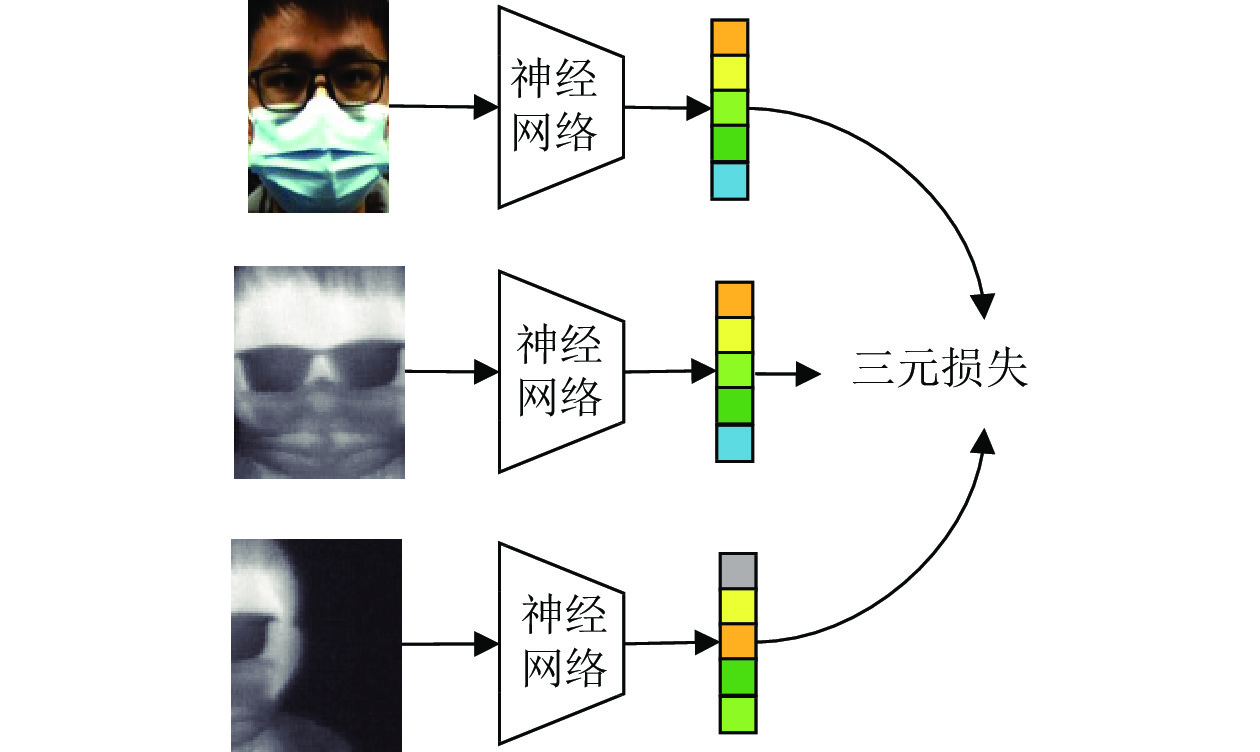
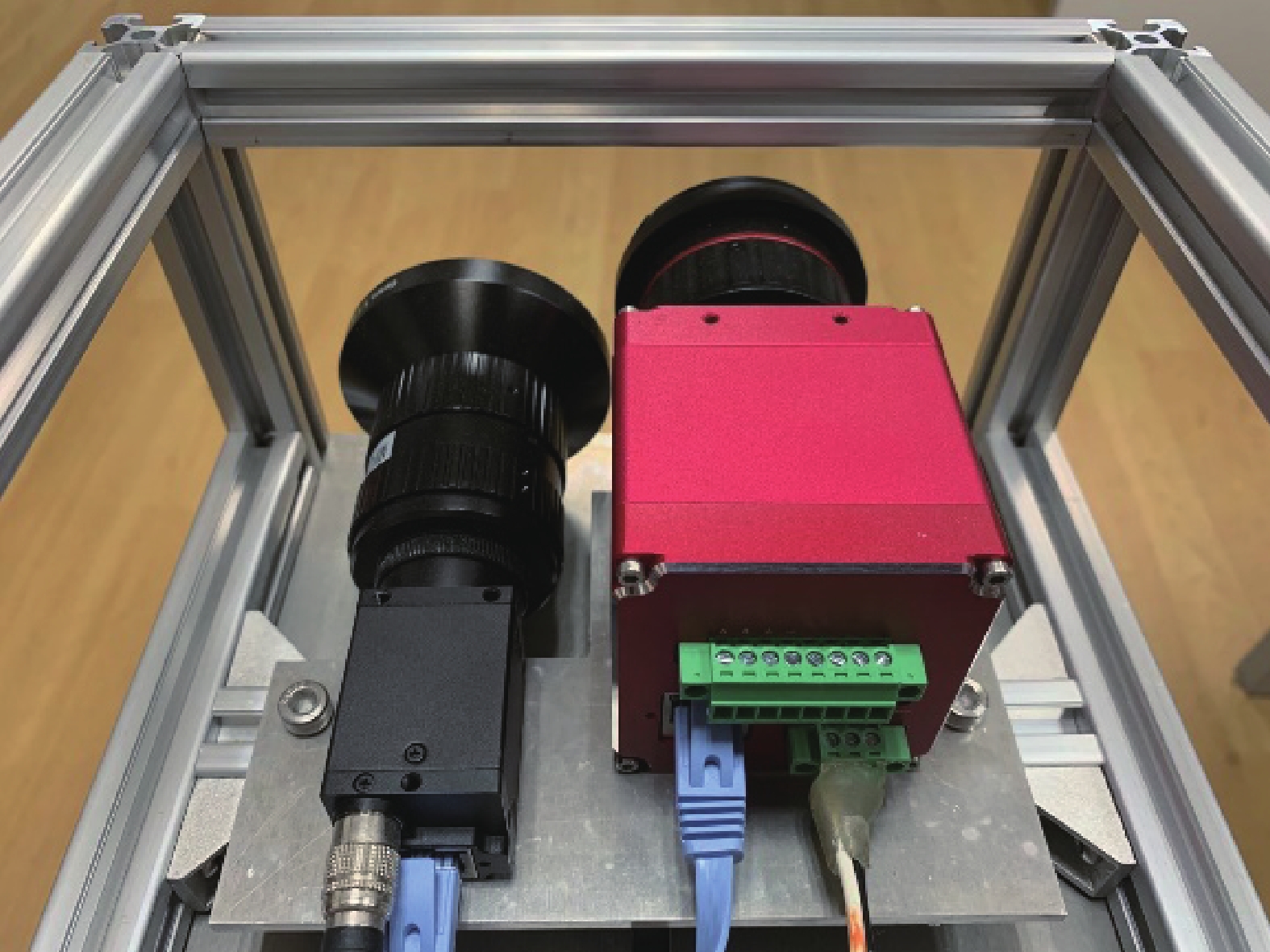
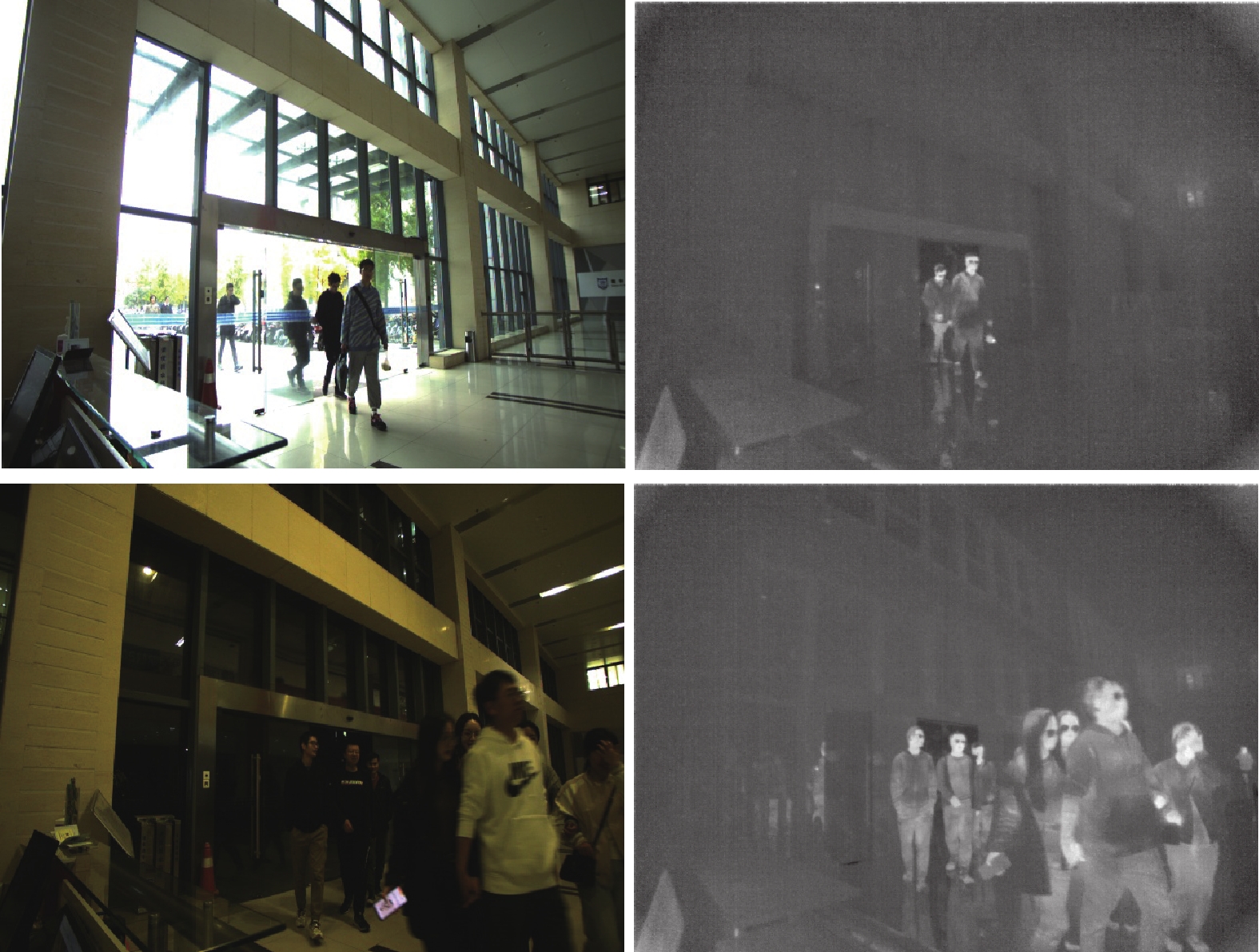
跨光谱人脸检测在活体人脸识别、体温筛查等领域有着重要的应用价值. 众所周知, 可见光人脸易于检测, 然而红外人脸难于检测, 因此借助可见光图像的人脸检测结果进而完成红外人脸检测是一种有效的解决方案. 但是跨光谱图像之间不可避免的存在偏差, 导致检测精度不高. 为了解决这一问题, 提出了一种弱对齐跨光谱图像的人脸检测算法, 该方法基于跨光谱图像之间的偏差设计了候选框布置策略, 并在此基础上提出了跨光谱特征表示方法用于选取最优候选框. 此外, 本文还构建了一个跨光谱人脸数据集. 最后, 在跨光谱人脸数据集和OTCBVS人脸数据集上的实验结果证明, 该方法能够较好地完成红外图像人脸检测任务.
跨光谱人脸检测在活体人脸识别、体温筛查等领域有着重要的应用价值. 众所周知, 可见光人脸易于检测, 然而红外人脸难于检测, 因此借助可见光图像的人脸检测结果进而完成红外人脸检测是一种有效的解决方案. 但是跨光谱图像之间不可避免的存在偏差, 导致检测精度不高. 为了解决这一问题, 提出了一种弱对齐跨光谱图像的人脸检测算法, 该方法基于跨光谱图像之间的偏差设计了候选框布置策略, 并在此基础上提出了跨光谱特征表示方法用于选取最优候选框. 此外, 本文还构建了一个跨光谱人脸数据集. 最后, 在跨光谱人脸数据集和OTCBVS人脸数据集上的实验结果证明, 该方法能够较好地完成红外图像人脸检测任务.


2023, 49(1): 148-160.
doi: 10.16383/j.aas.c220476
摘要:
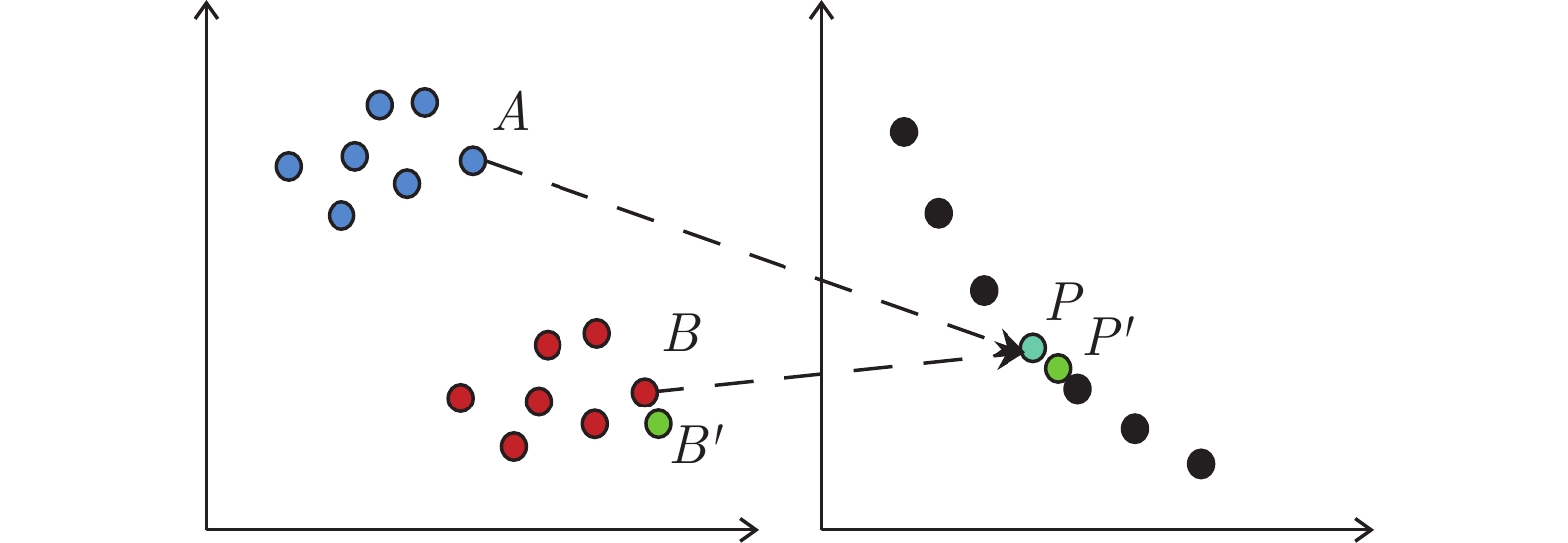
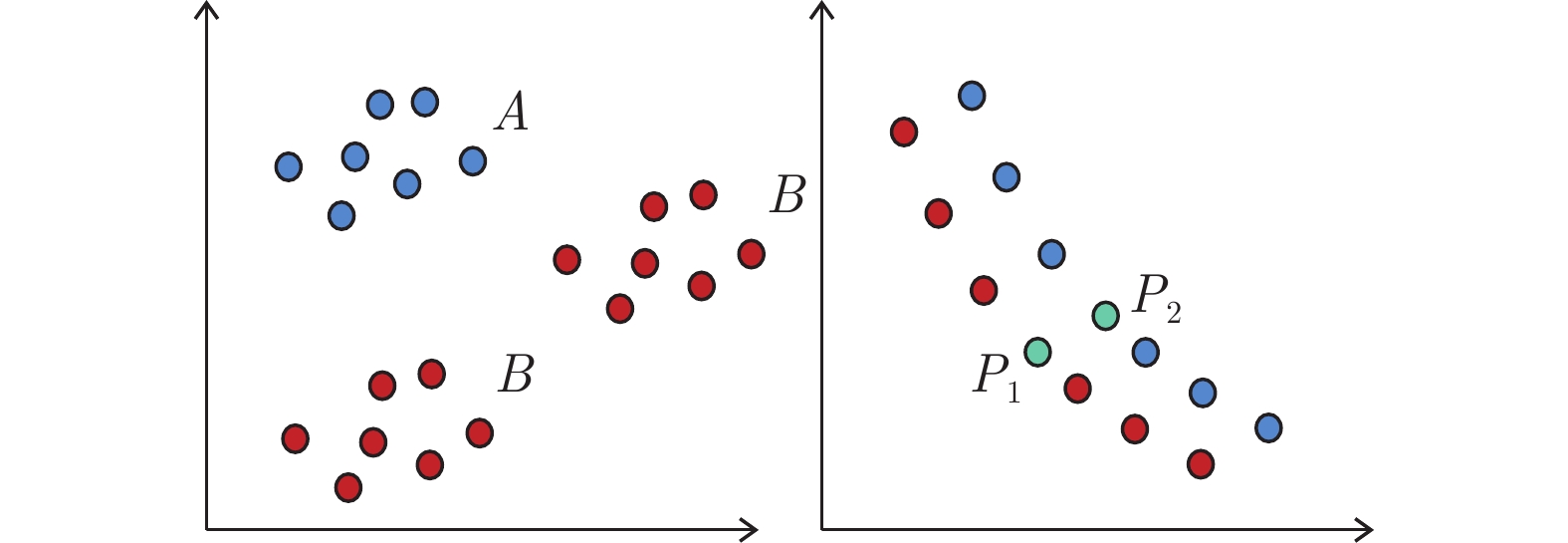
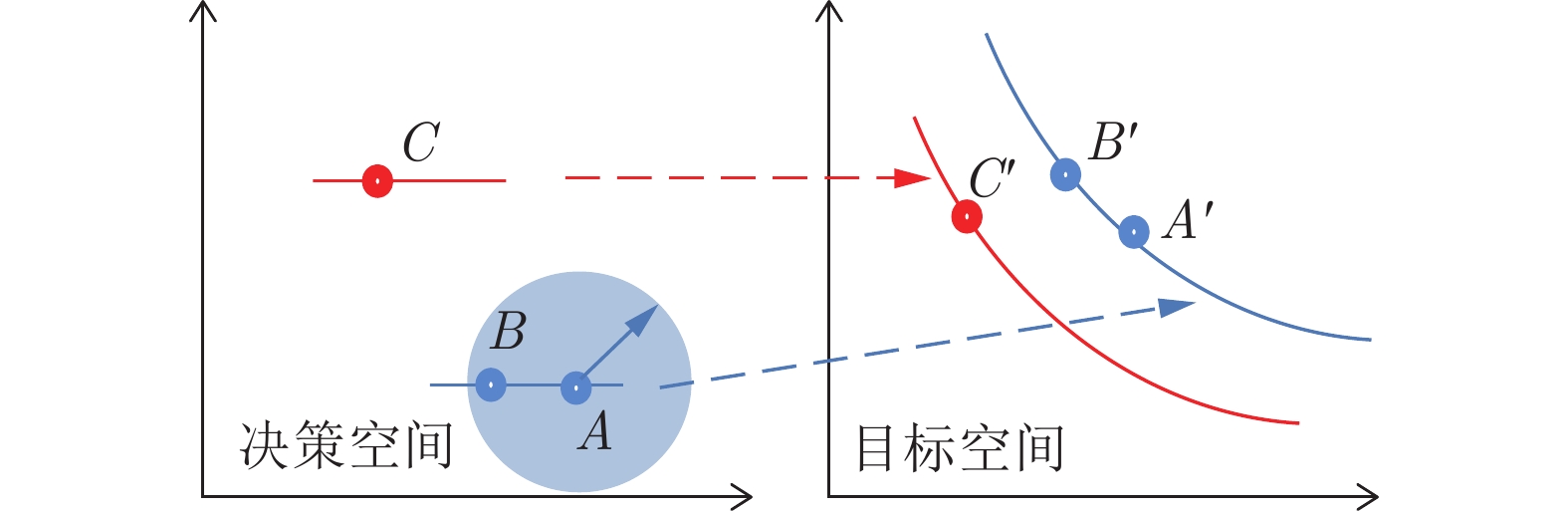
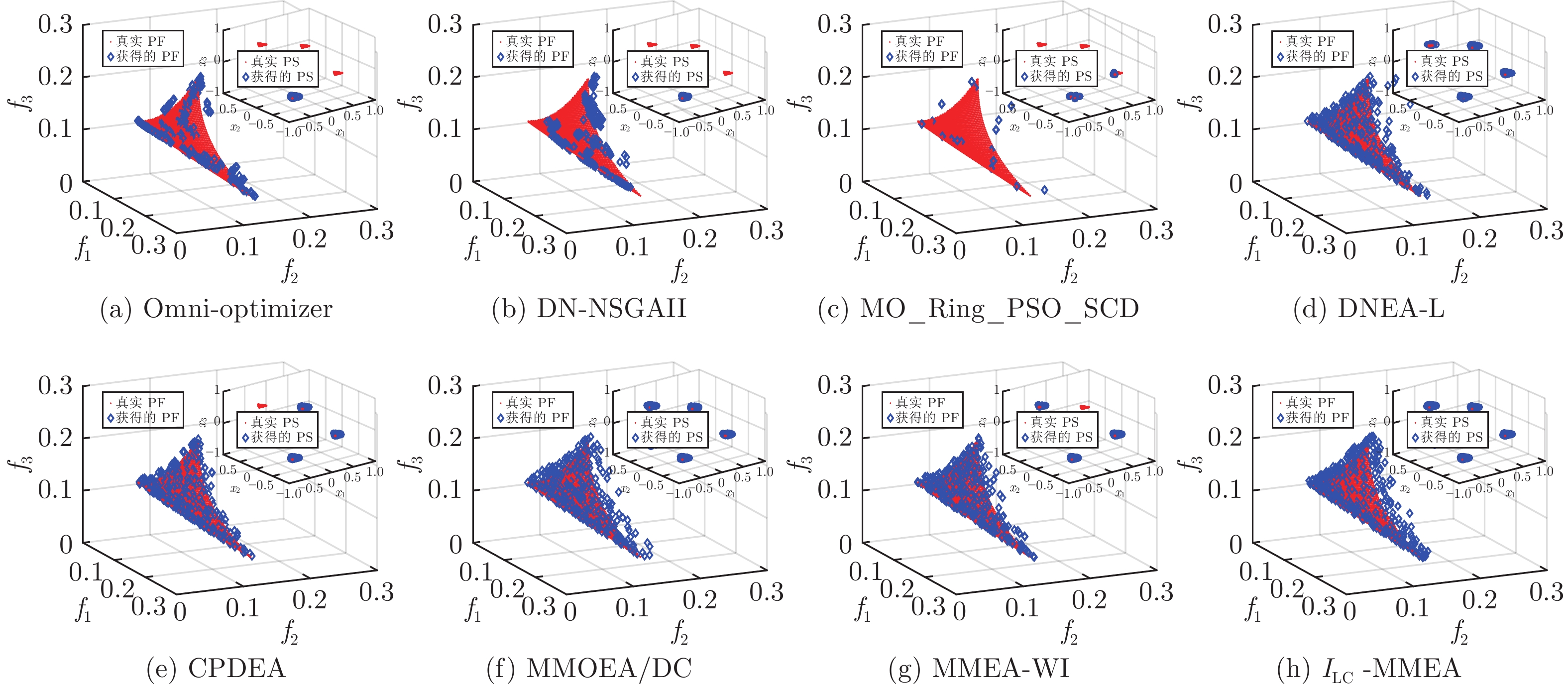
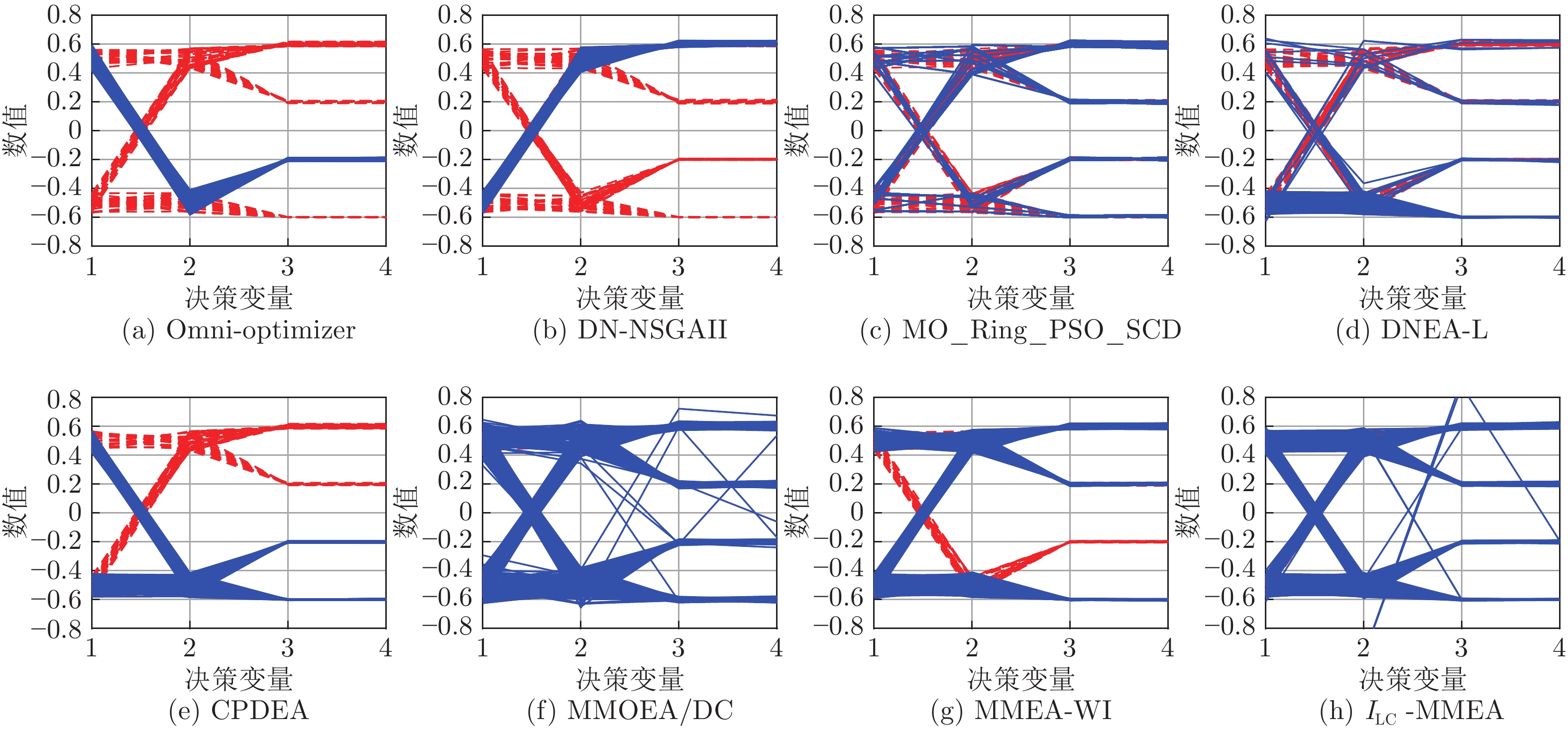
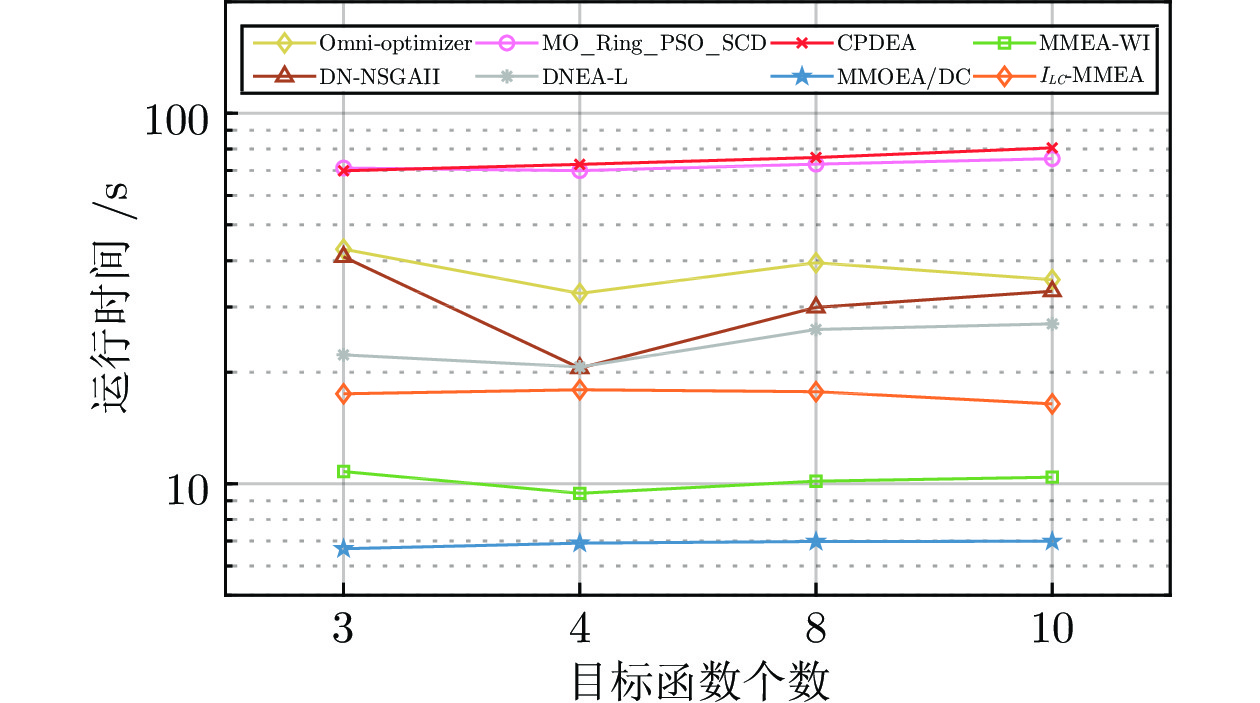
多模态多目标优化问题 (Multimodal multi-objective optimization problems, MMOPs)是指具有多个全局或局部Pareto解集(Pareto solution sets, PSs)的多目标优化问题 (Multi-objective optimization problems, MOPs). 在这类问题中, Pareto前沿(Pareto front, PF)上相距很近的目标向量, 可能对应于决策空间中相距较远的不同解. 在实际应用中全局或局部最优解的缺失可能导致决策者缺乏对问题的整体认识, 造成不必要的困难或经济损失. 大部分多模态多目标进化算法 (Multimodal multi-objective evolutionary algorithms, MMEAs) 仅关注获取尽可能多的全局最优解集, 而忽略了对局部最优解集的搜索. 为了找到局部最优解集并提高多模态优化算法的性能, 首先提出了一种局部收敛性指标 (\begin{document}$ I_{LC}$\end{document} ![]()
![]()
多模态多目标优化问题 (Multimodal multi-objective optimization problems, MMOPs)是指具有多个全局或局部Pareto解集(Pareto solution sets, PSs)的多目标优化问题 (Multi-objective optimization problems, MOPs). 在这类问题中, Pareto前沿(Pareto front, PF)上相距很近的目标向量, 可能对应于决策空间中相距较远的不同解. 在实际应用中全局或局部最优解的缺失可能导致决策者缺乏对问题的整体认识, 造成不必要的困难或经济损失. 大部分多模态多目标进化算法 (Multimodal multi-objective evolutionary algorithms, MMEAs) 仅关注获取尽可能多的全局最优解集, 而忽略了对局部最优解集的搜索. 为了找到局部最优解集并提高多模态优化算法的性能, 首先提出了一种局部收敛性指标 (



2023, 49(1): 161-171.
doi: 10.16383/j.aas.c200585
摘要:
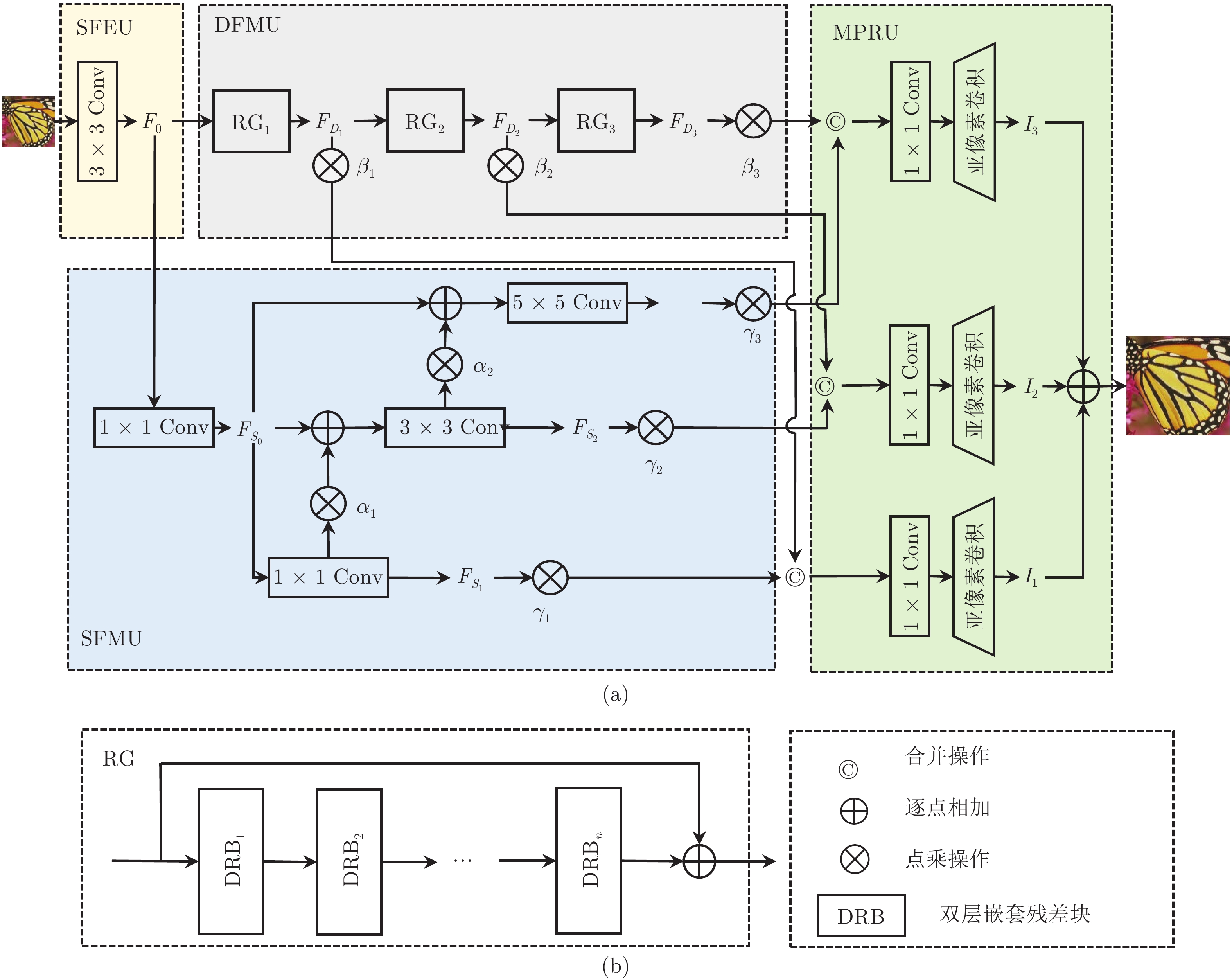
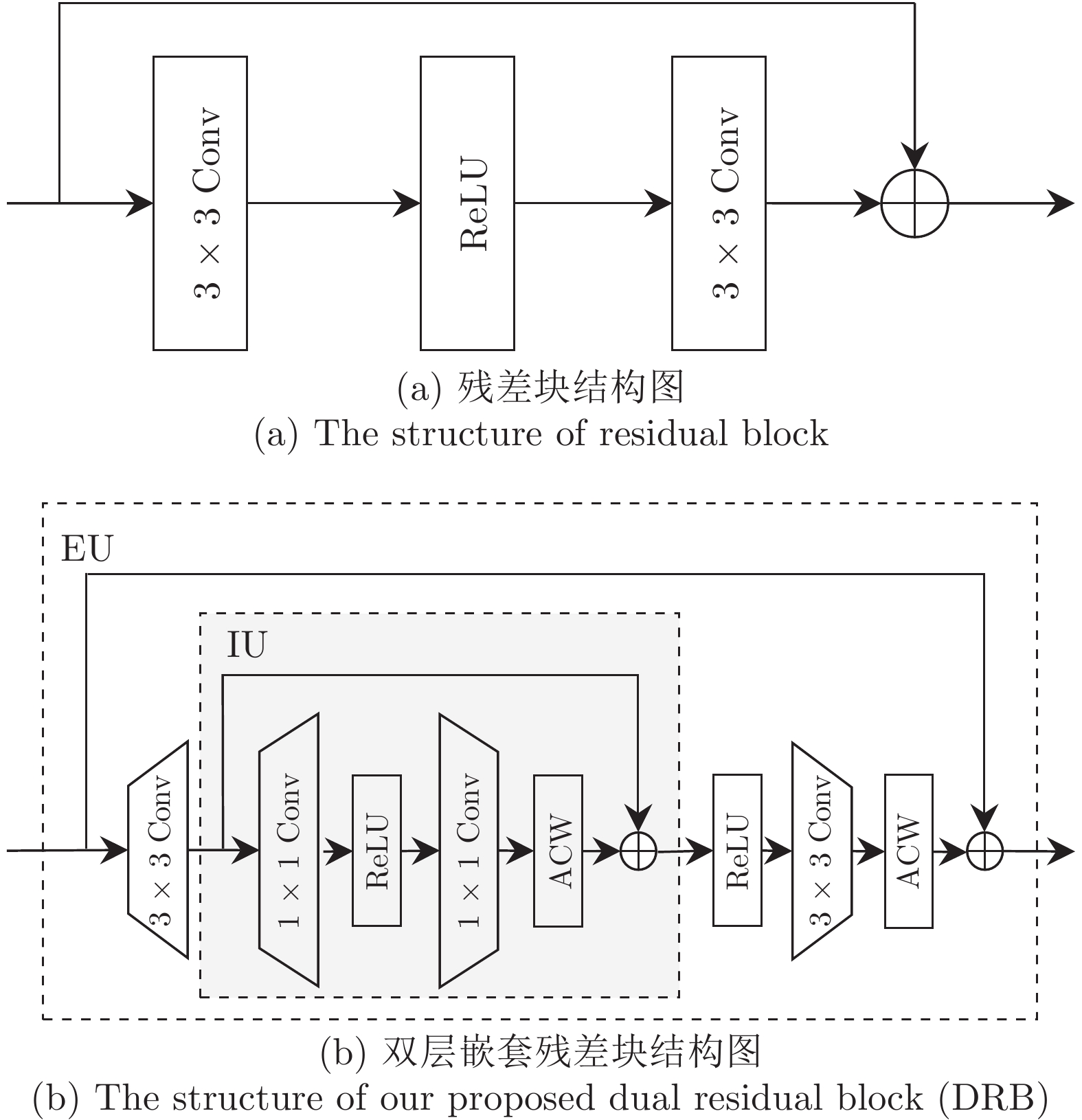
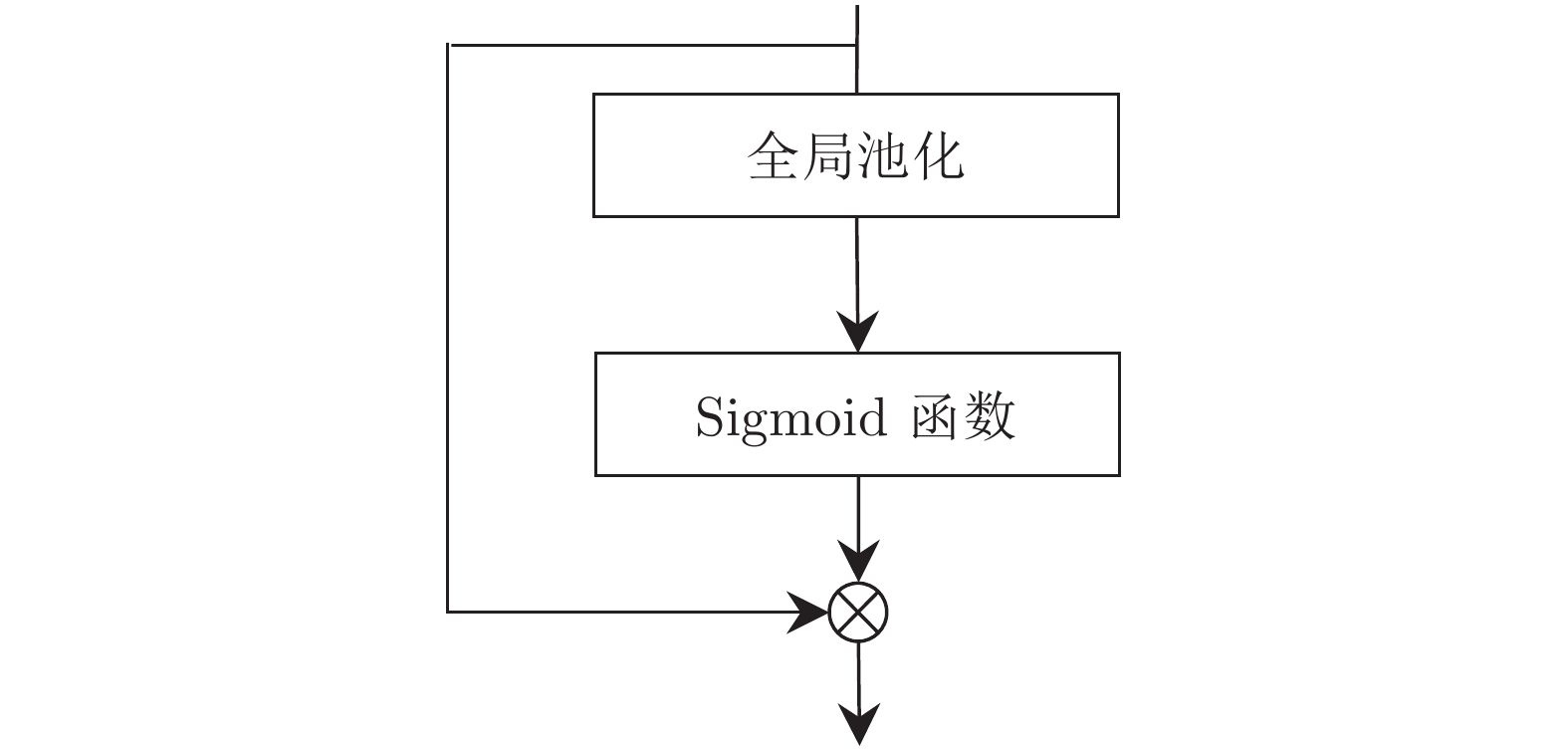
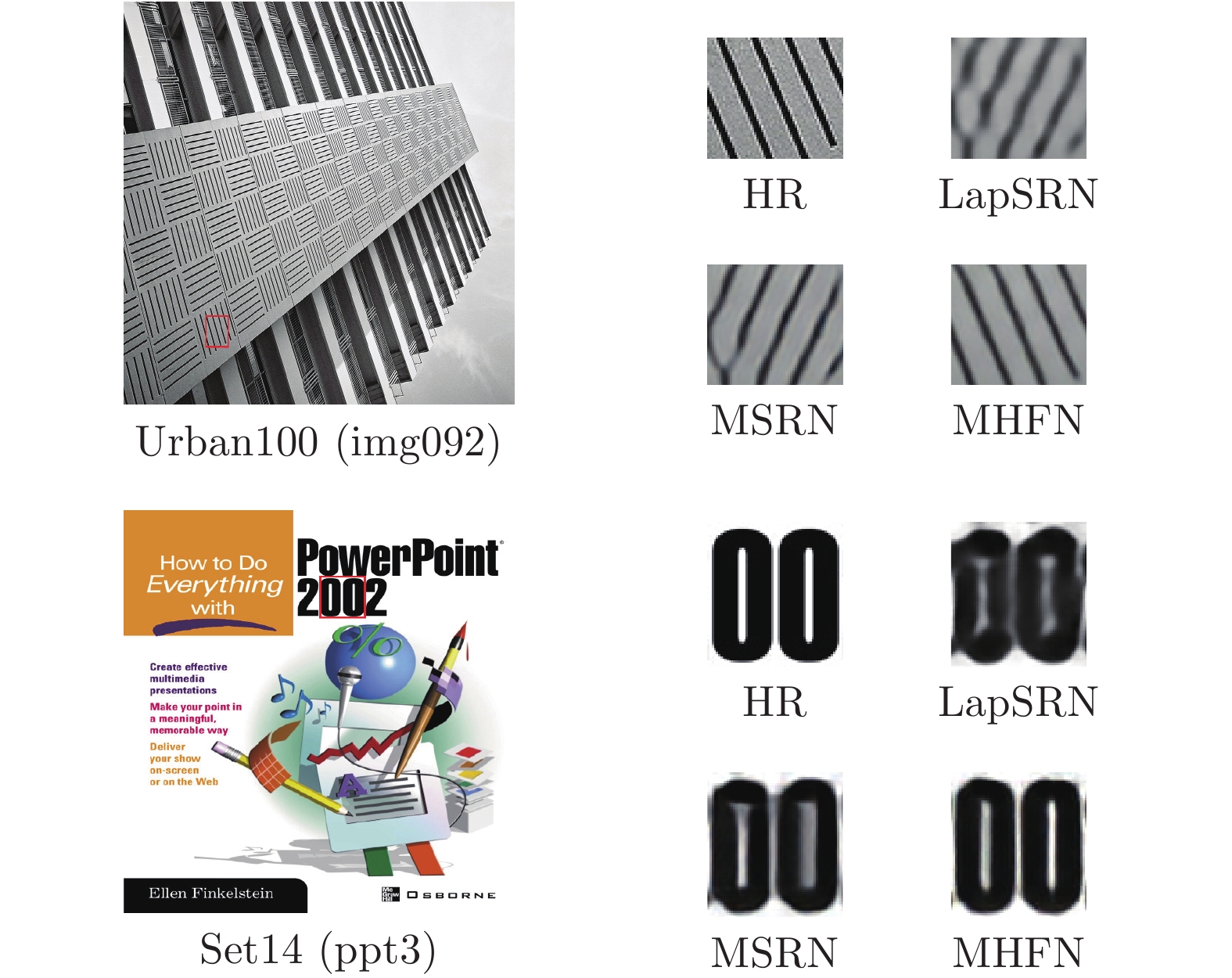
深度卷积神经网络显著改进了单图像超分辨率的性能. 更深的网络往往能获得更好的性能. 但是, 加深网络会导致参数量急剧增加, 限制了它在资源受限设备上的应用, 比如智能手机. 提出了一个融合多层次特征的轻量级单图像超分辨率网络, 主要构件是双层嵌套残差块. 为了更好地提取特征, 减少参数量, 每个残差块采用对称结构: 先两次扩张, 然后两次压缩通道数. 在残差块中, 通过添加自相关权重单元, 加权融合不同通道的特征信息. 实验证明, 该方法显著优于当前同类方法.
深度卷积神经网络显著改进了单图像超分辨率的性能. 更深的网络往往能获得更好的性能. 但是, 加深网络会导致参数量急剧增加, 限制了它在资源受限设备上的应用, 比如智能手机. 提出了一个融合多层次特征的轻量级单图像超分辨率网络, 主要构件是双层嵌套残差块. 为了更好地提取特征, 减少参数量, 每个残差块采用对称结构: 先两次扩张, 然后两次压缩通道数. 在残差块中, 通过添加自相关权重单元, 加权融合不同通道的特征信息. 实验证明, 该方法显著优于当前同类方法.

2023, 49(1): 172-184.
doi: 10.16383/j.aas.c210897
摘要:
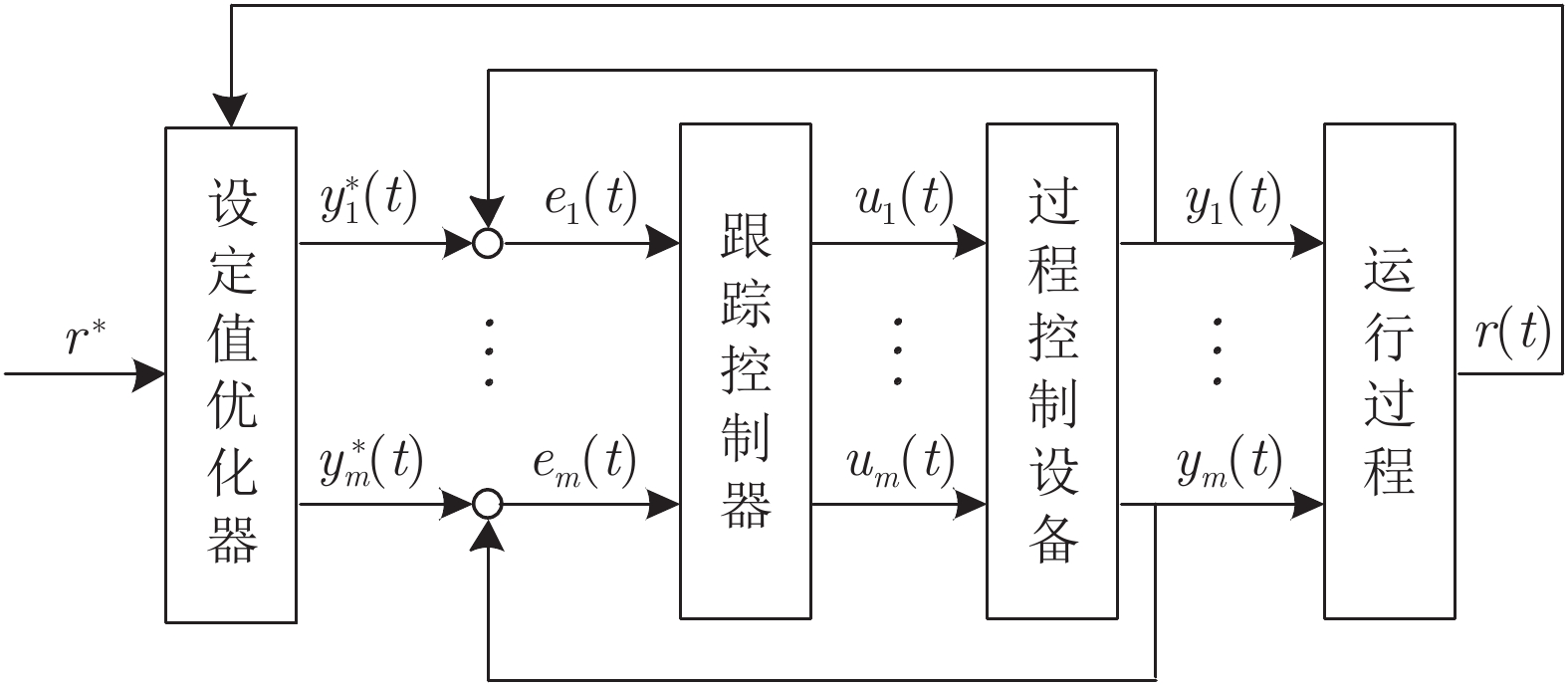
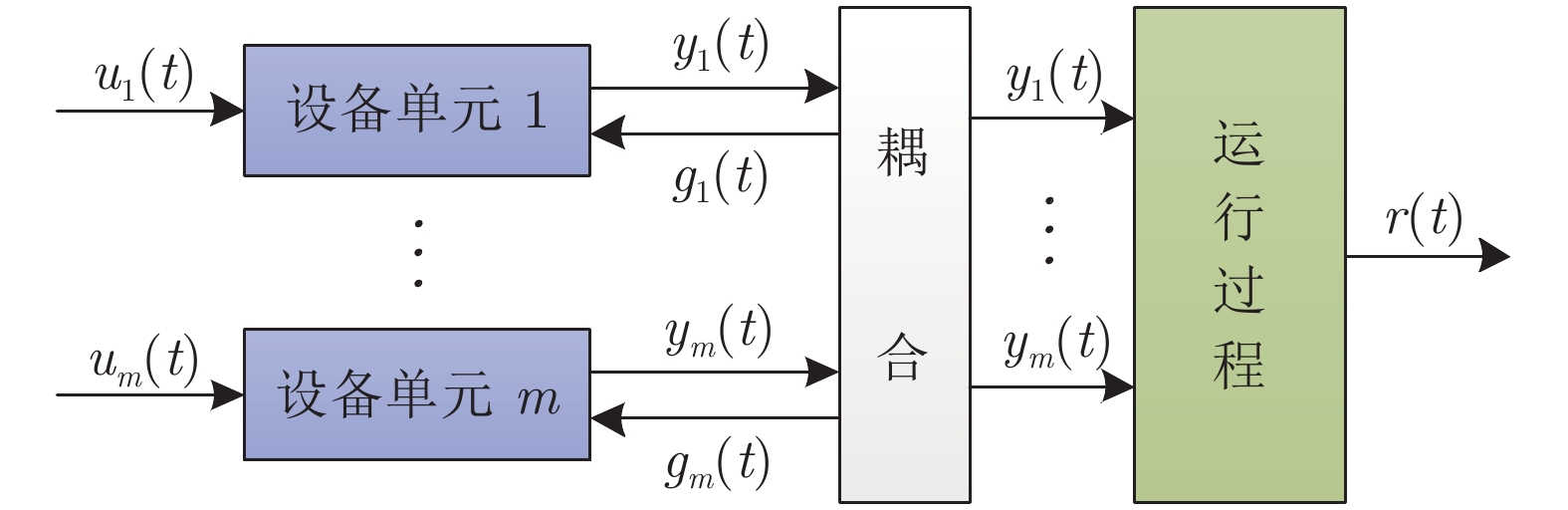
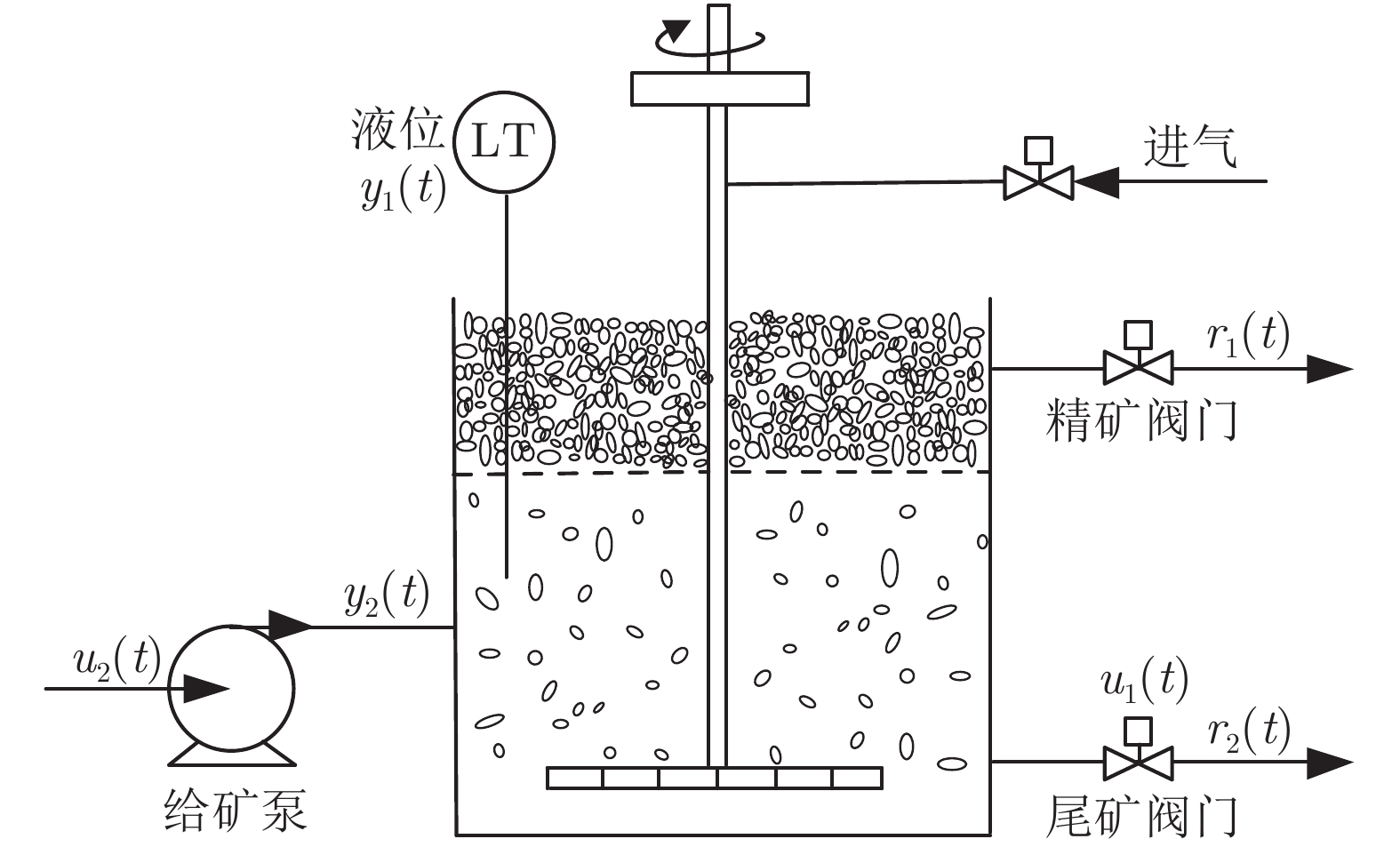
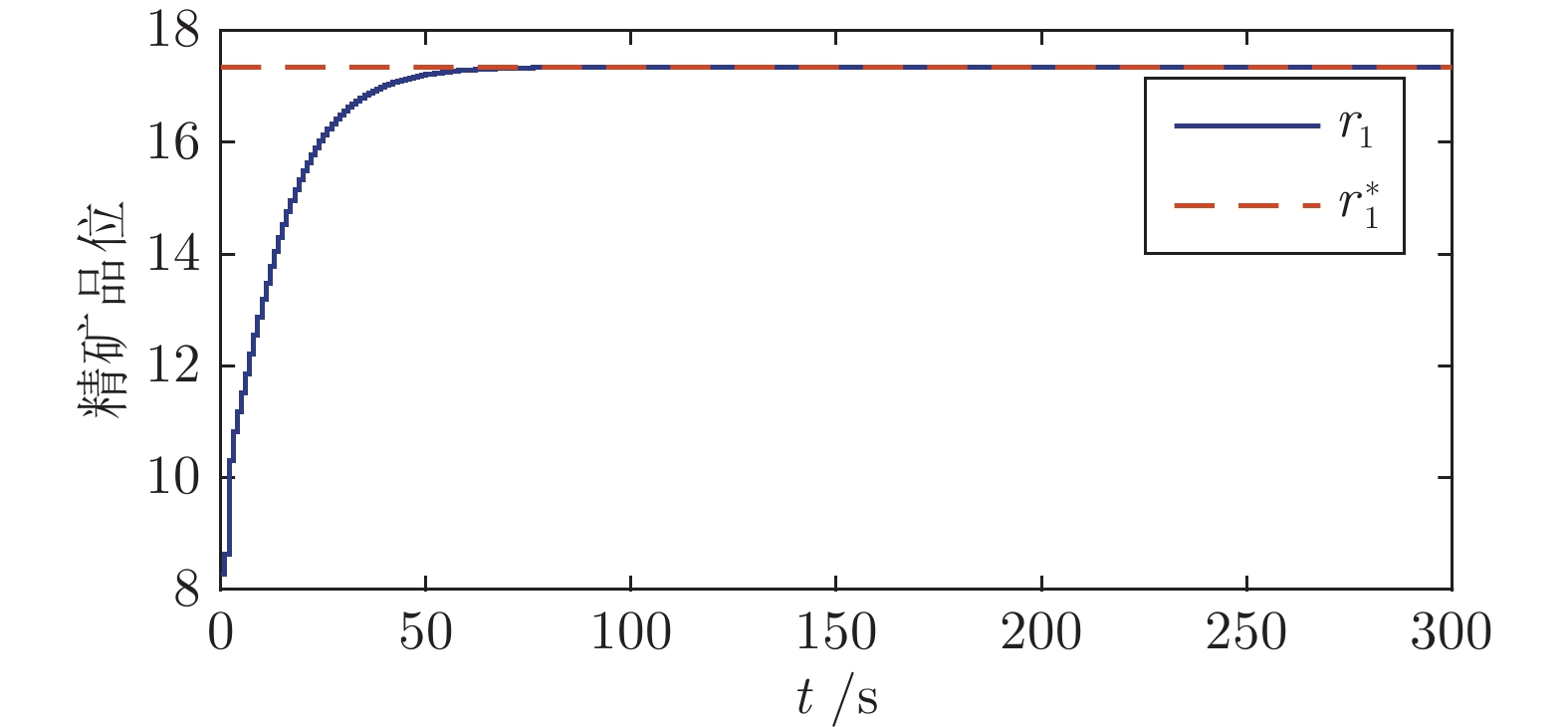
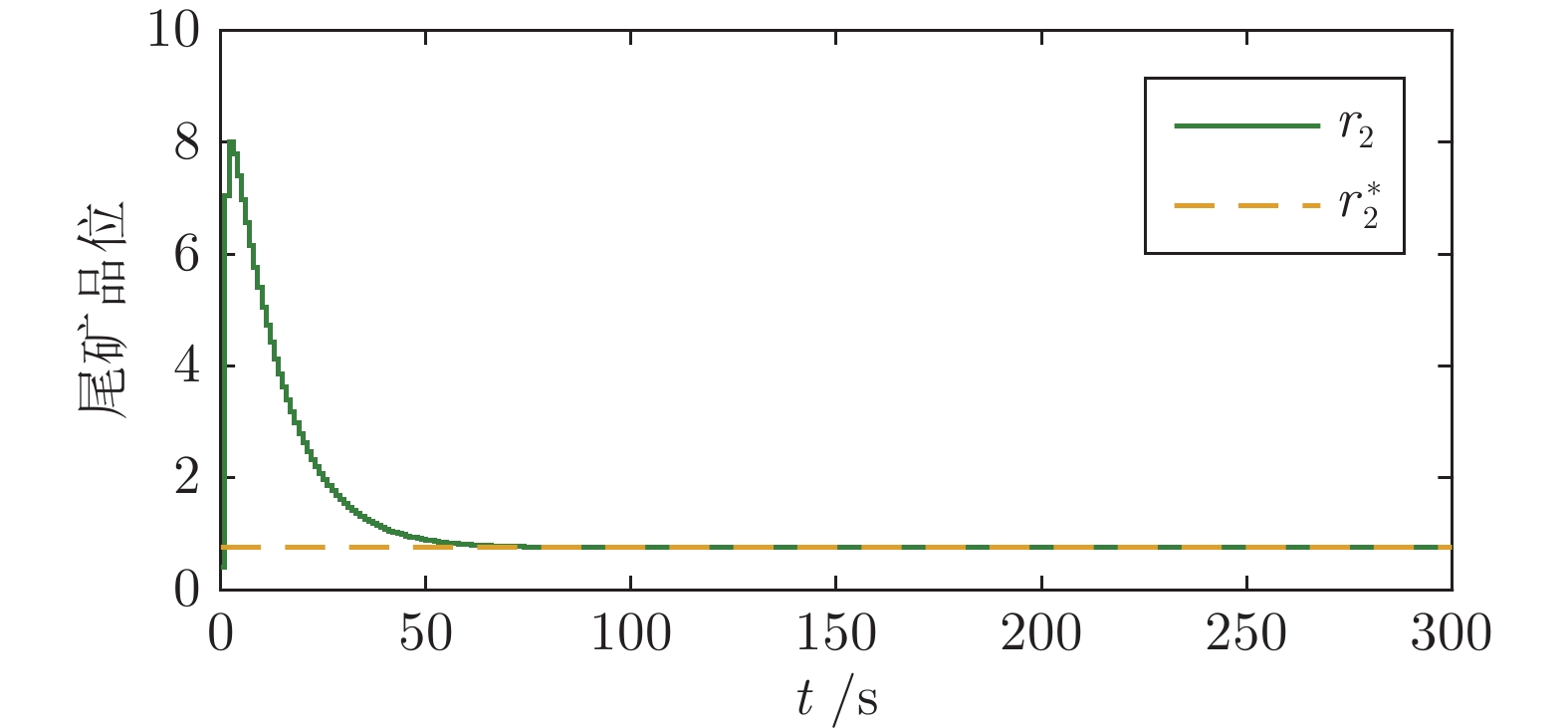
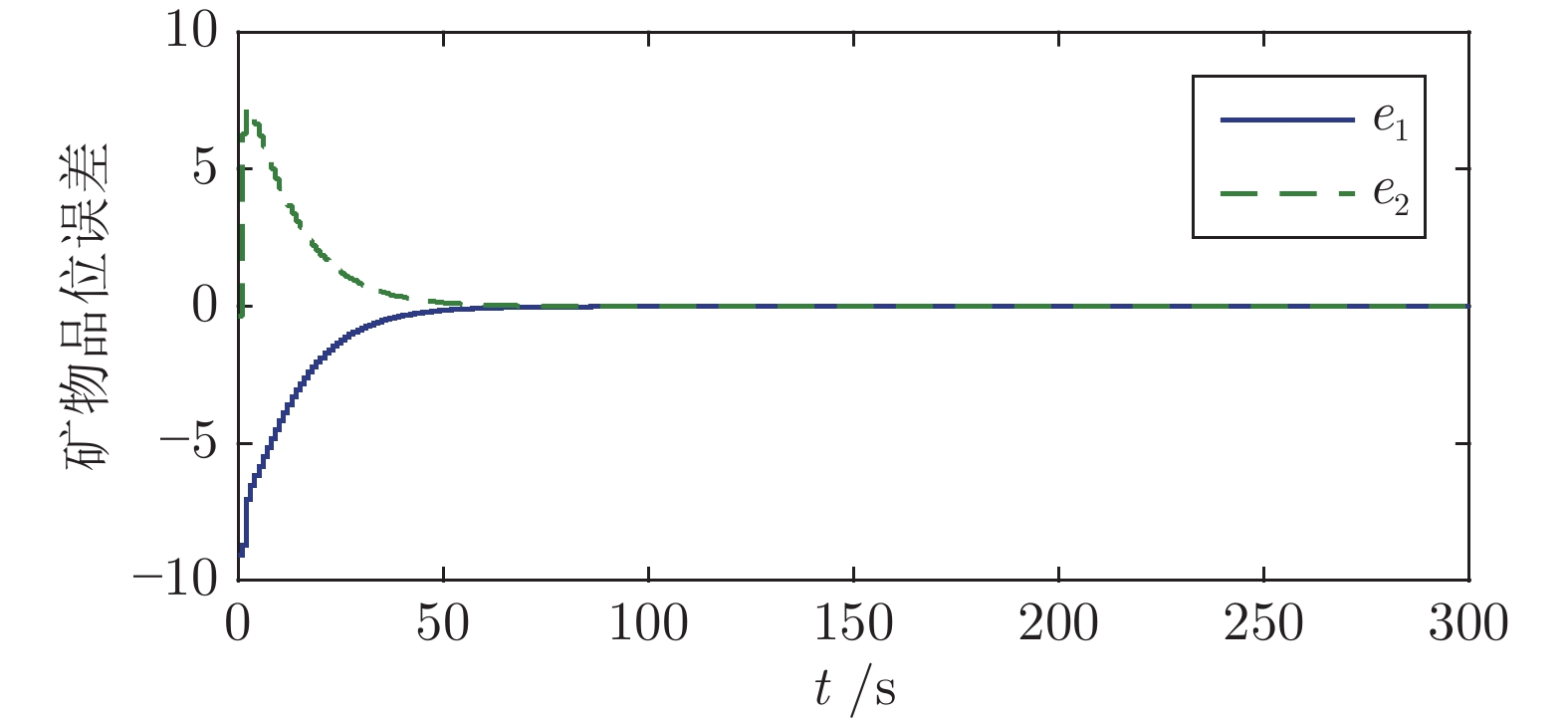
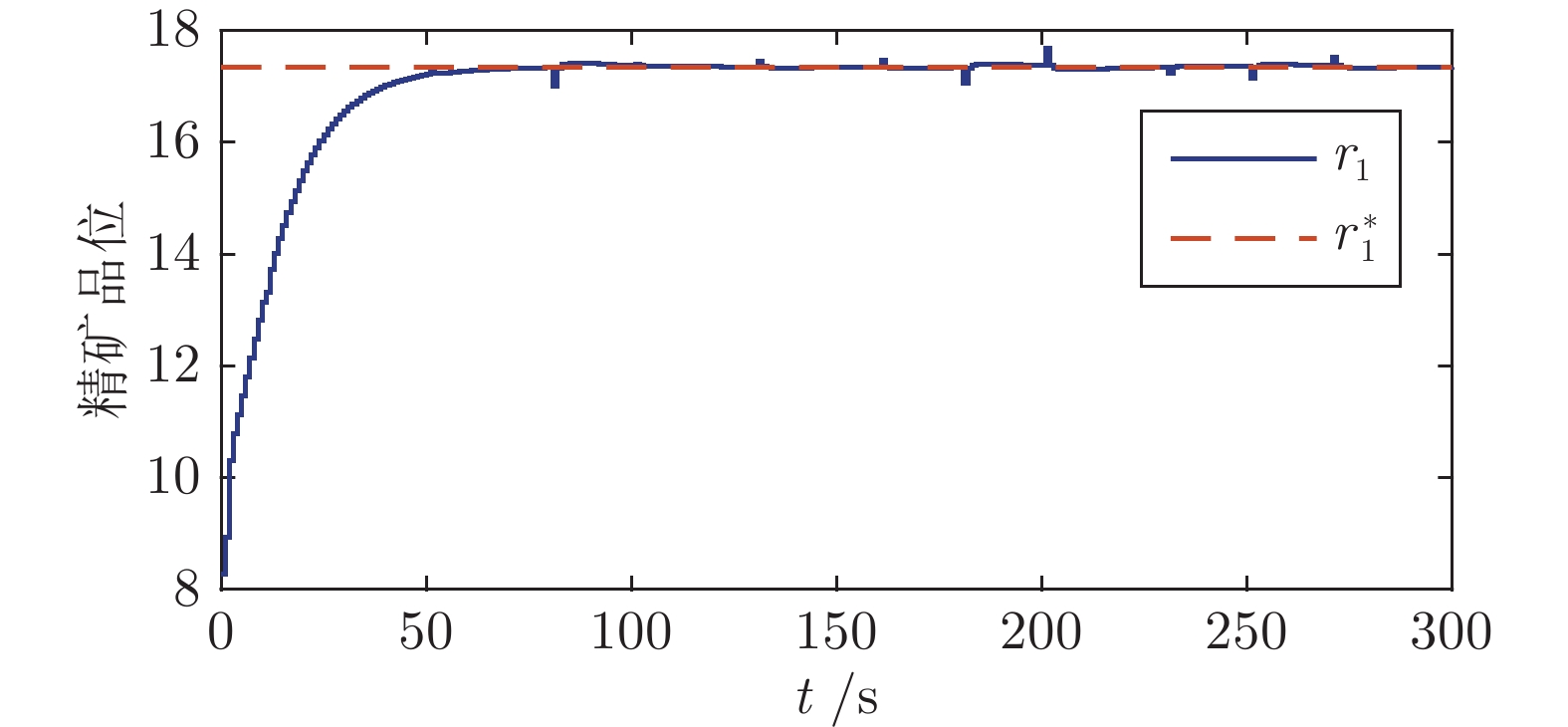
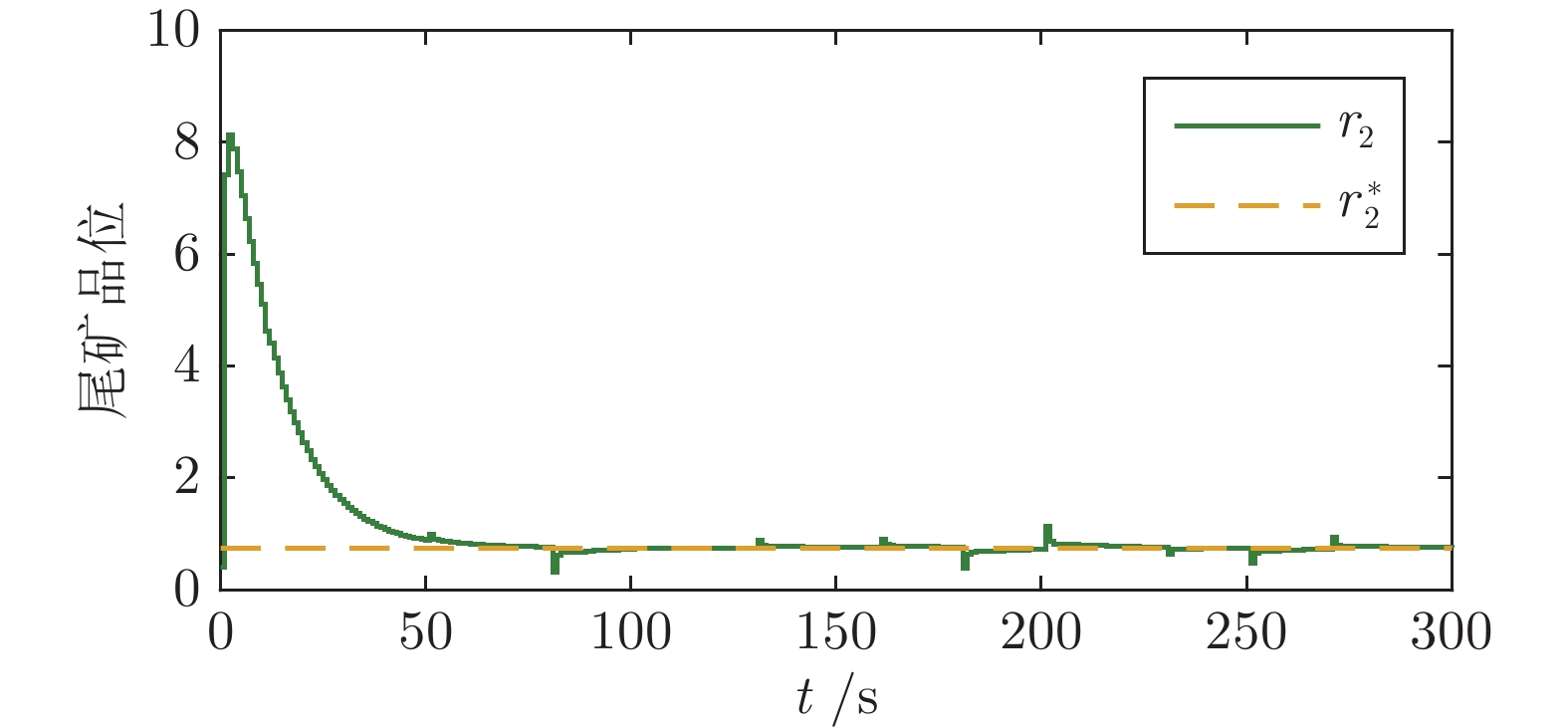
复杂工业过程具有模型维数高、多时间尺度耦合、动态不确定性等特点, 其运行优化控制(Operational optimal control, OOC)一直是控制领域的研究难点与热点. 本文聚焦一类由多个快变且互联的设备单元与慢变且模型未知的运行过程串联组成的工业过程, 提出一种数据和模型混合驱动的非串级双速率组合分散运行优化控制方法. 该方法通过奇异摄动理论, 将非串级双速率运行优化问题描述为异步采样的慢子系统最优设定值跟踪和快子系统最优调节控制. 利用工业运行数据, 采用不依赖系统动态的Q-学习算法设计慢子系统最优跟踪策略, 克服运行过程模型难以建立的情形; 针对快子系统, 设计基于模型的分散次优控制策略, 并给出收敛因子的下界, 解决设备层互联项对系统稳定性的影响. 通过浮选过程仿真实验验证了所提控制方法的有效性.
复杂工业过程具有模型维数高、多时间尺度耦合、动态不确定性等特点, 其运行优化控制(Operational optimal control, OOC)一直是控制领域的研究难点与热点. 本文聚焦一类由多个快变且互联的设备单元与慢变且模型未知的运行过程串联组成的工业过程, 提出一种数据和模型混合驱动的非串级双速率组合分散运行优化控制方法. 该方法通过奇异摄动理论, 将非串级双速率运行优化问题描述为异步采样的慢子系统最优设定值跟踪和快子系统最优调节控制. 利用工业运行数据, 采用不依赖系统动态的Q-学习算法设计慢子系统最优跟踪策略, 克服运行过程模型难以建立的情形; 针对快子系统, 设计基于模型的分散次优控制策略, 并给出收敛因子的下界, 解决设备层互联项对系统稳定性的影响. 通过浮选过程仿真实验验证了所提控制方法的有效性.






2023, 49(1): 185-196.
doi: 10.16383/j.aas.c220219
摘要:
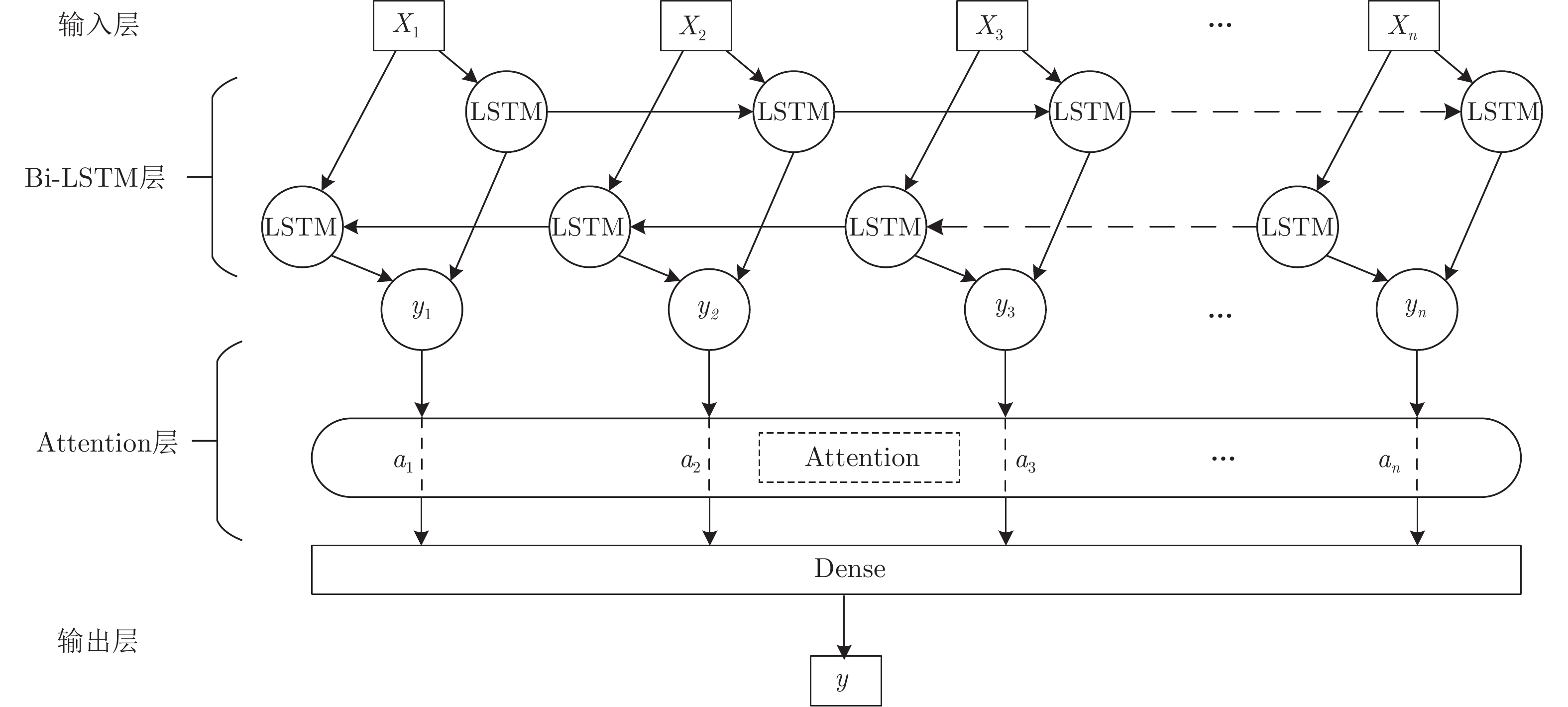
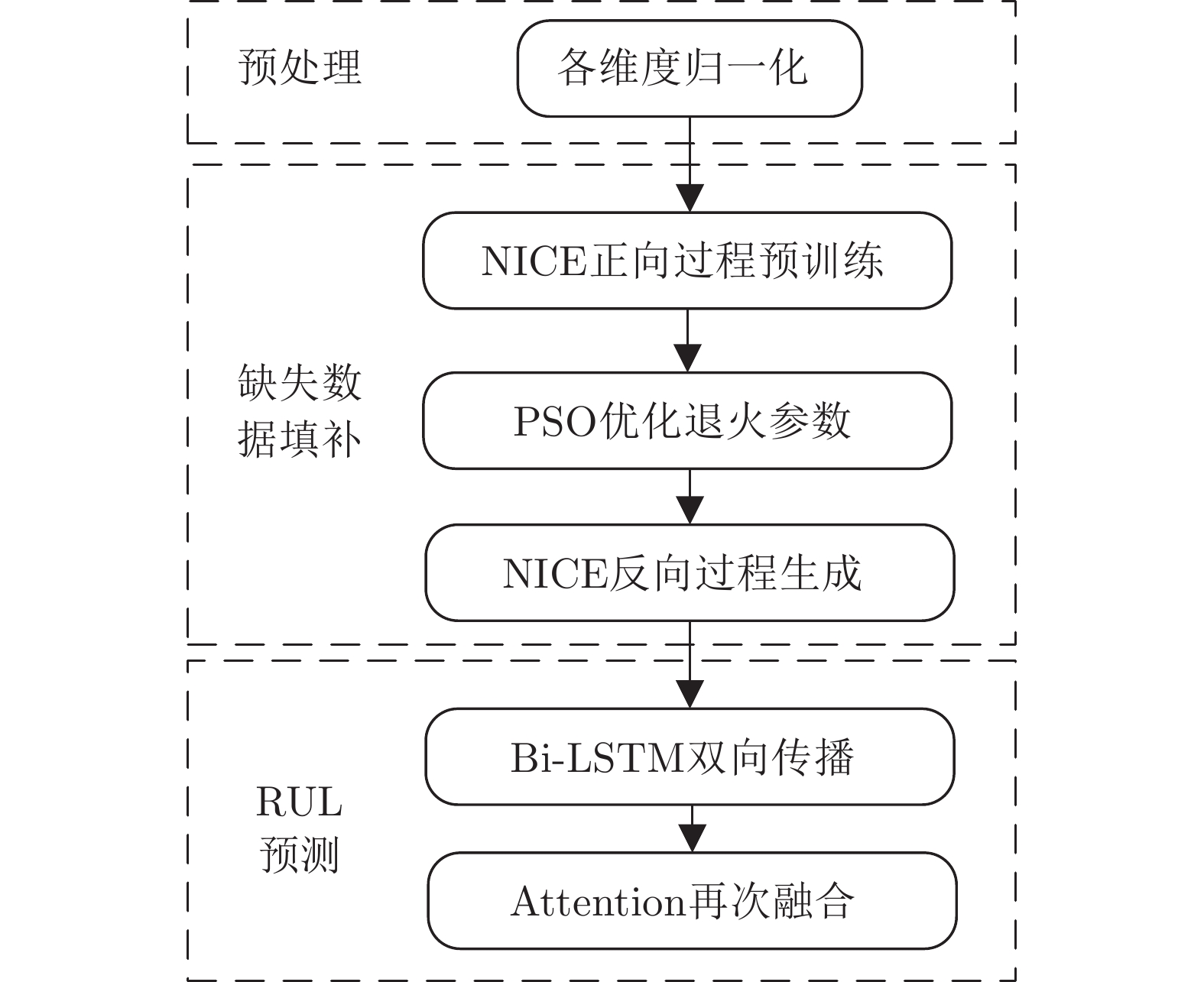
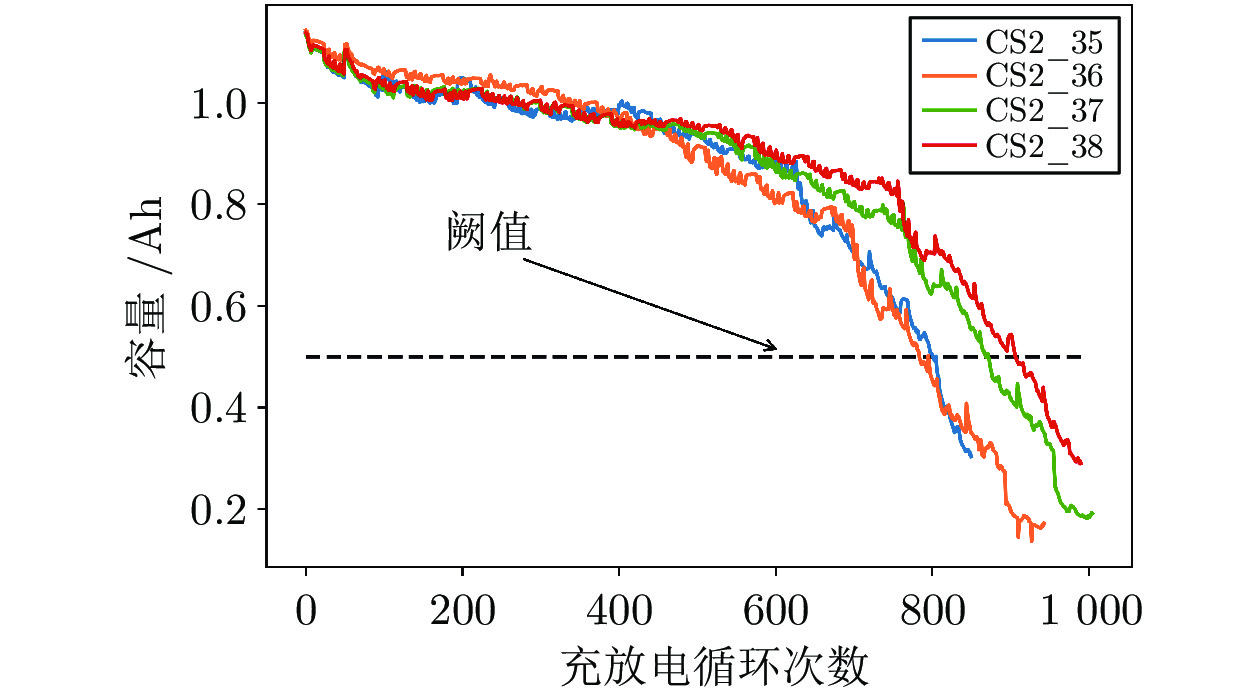
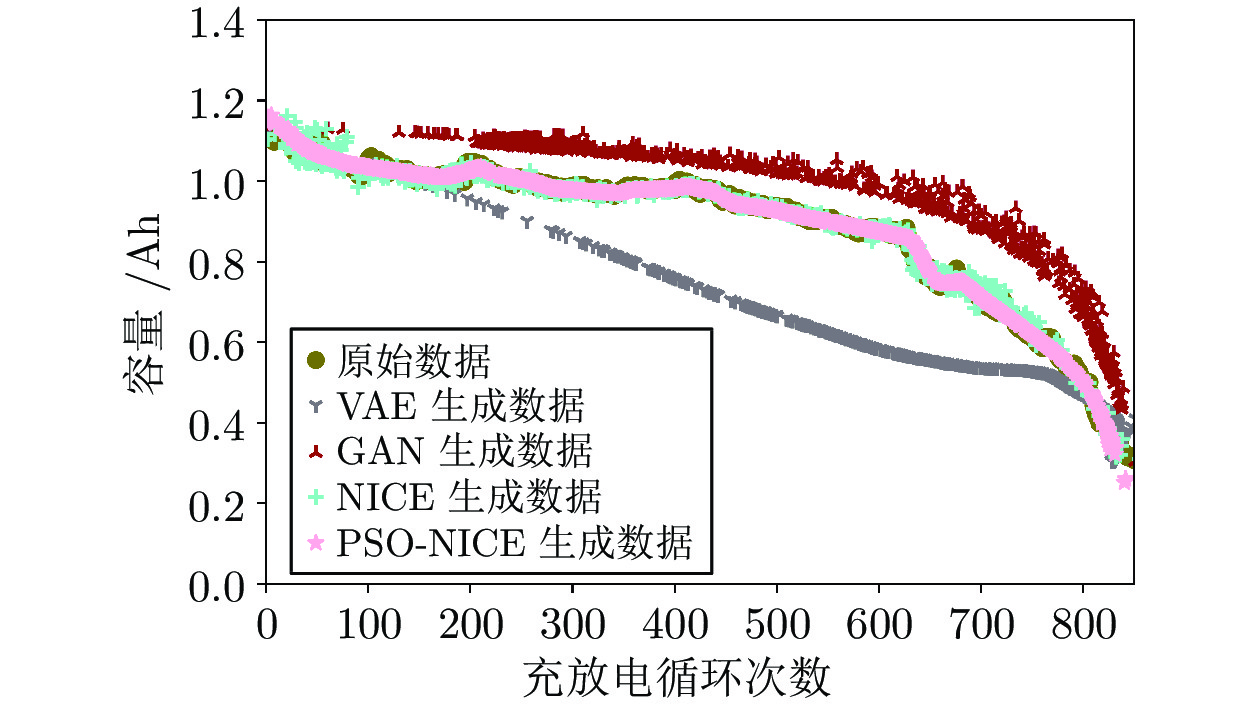
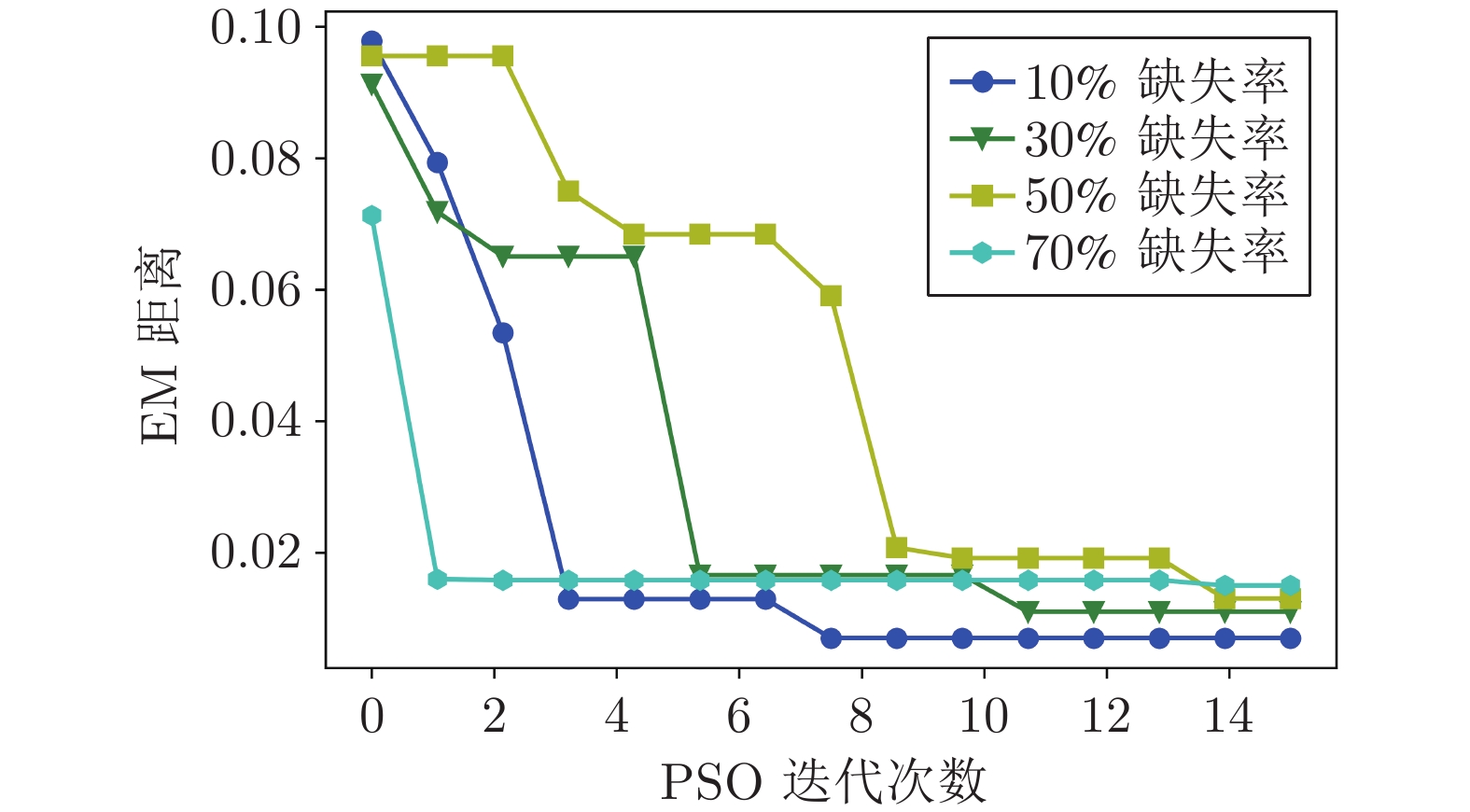
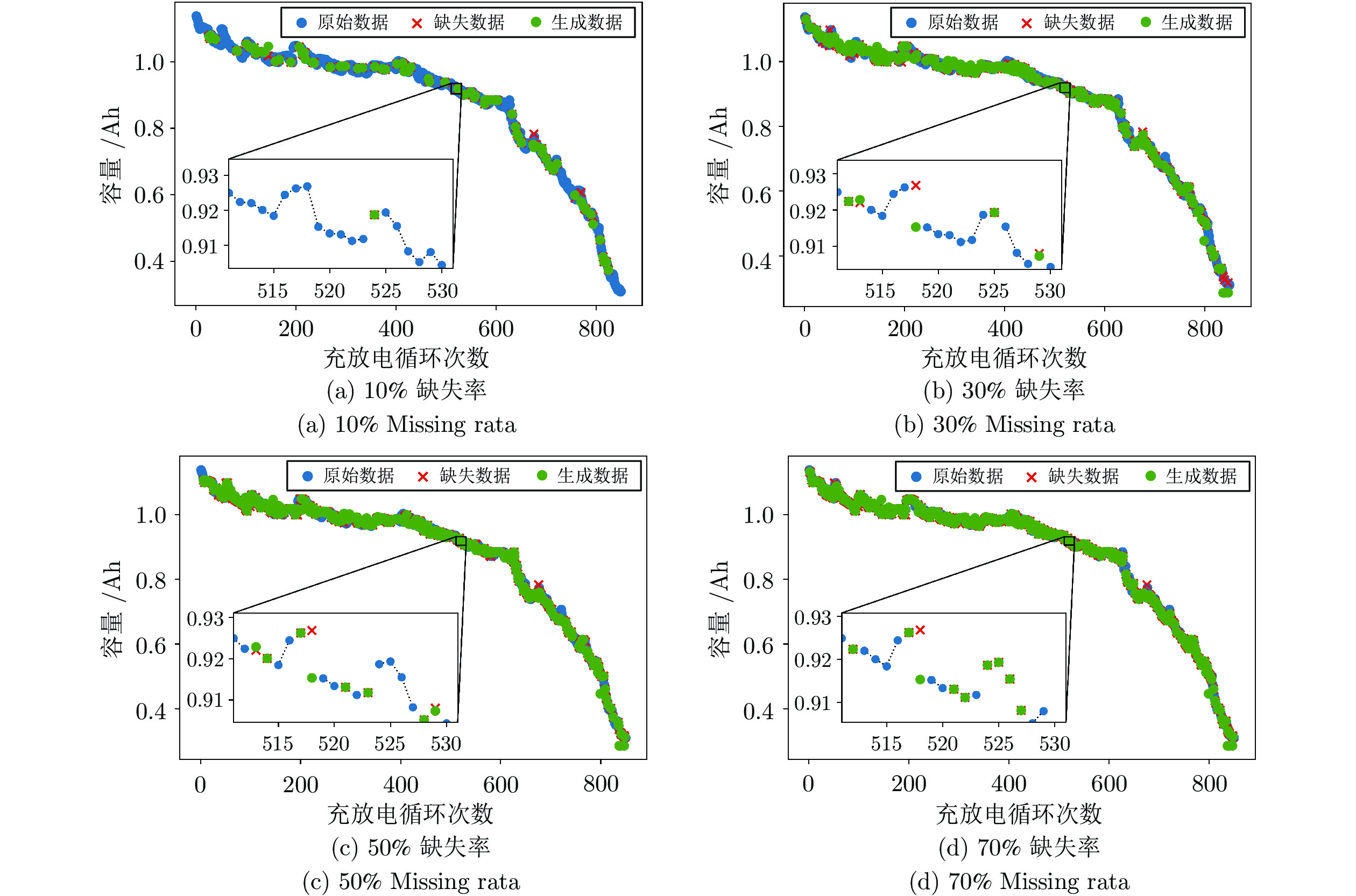
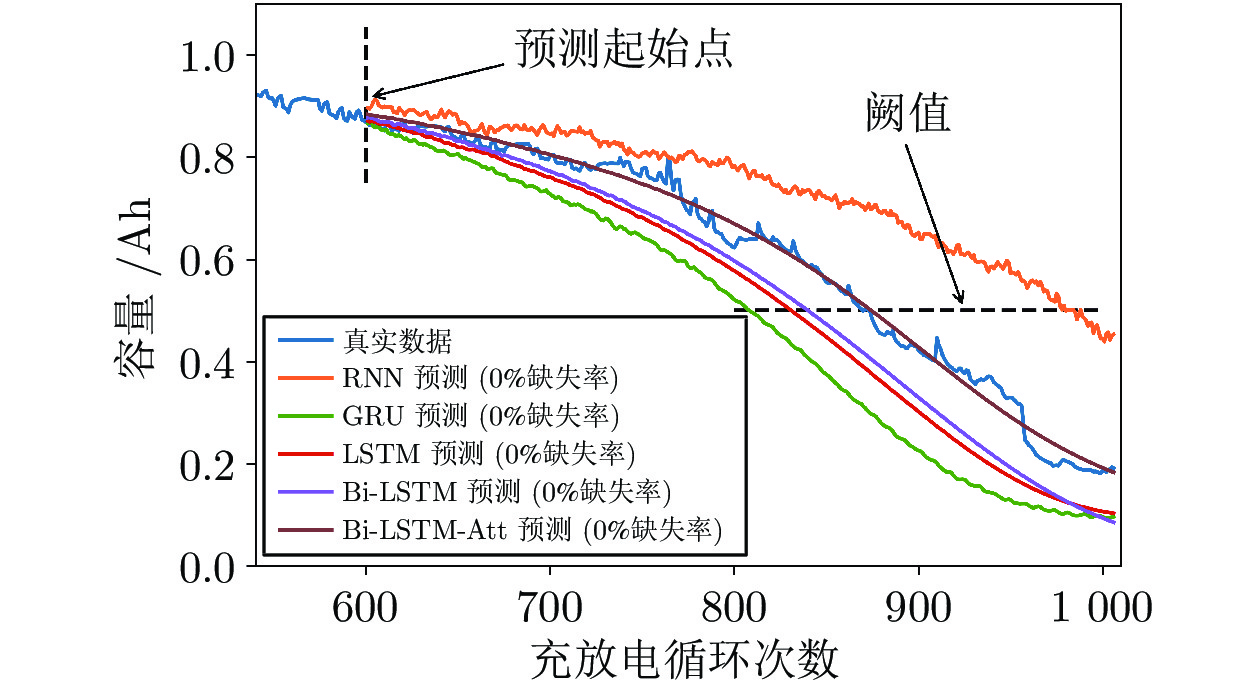
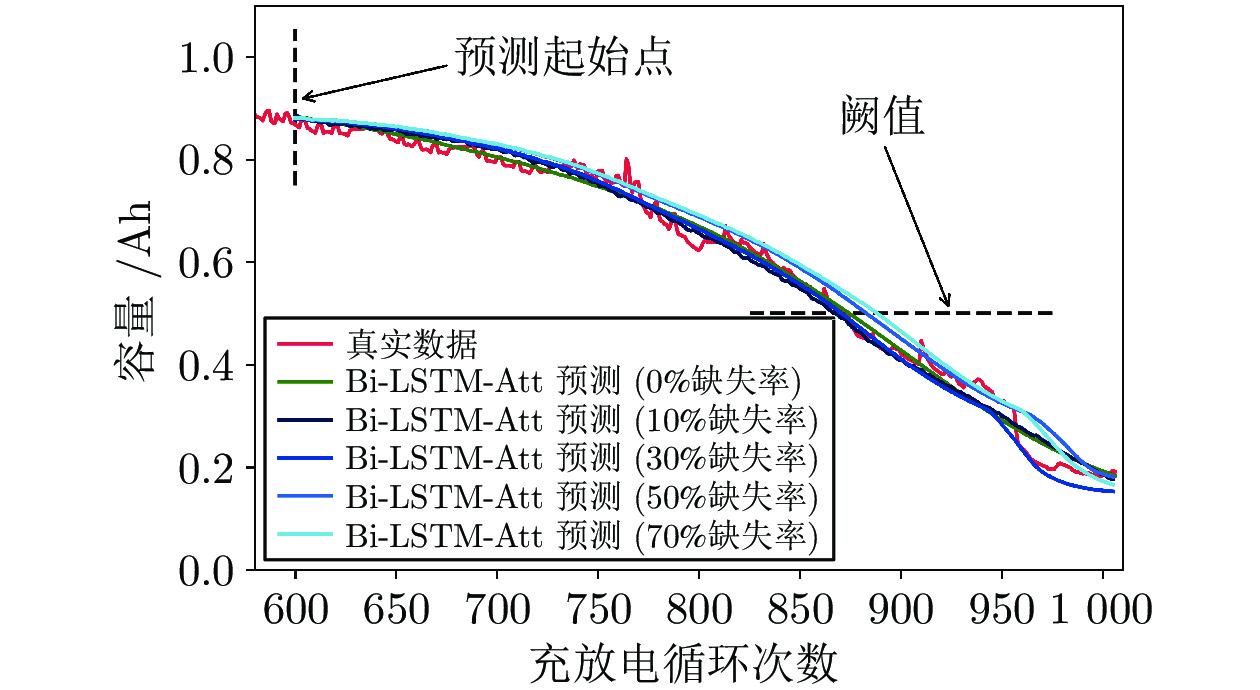
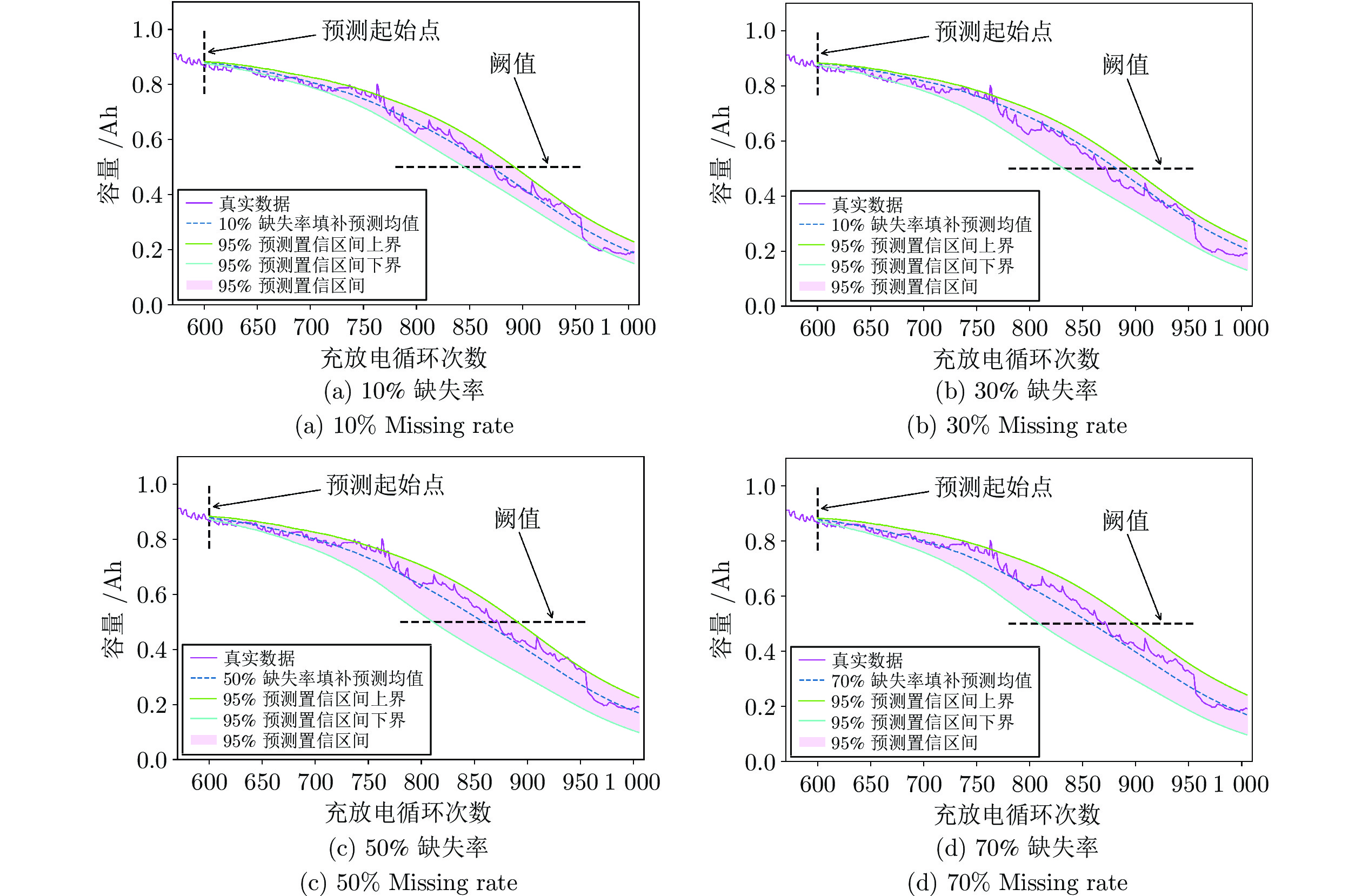
针对缺失数据生成模型精度低和训练速度慢的问题, 本文基于流模型框架提出了一种改进非线性独立成分估计(Nonlinear independent components estimation, NICE)的缺失时间序列生成方法. 该方法依靠流模型框架生成模型精度高、训练过程速度快的优势, 并结合粒子群优化算法(Particle swarm optimization, PSO) 优化NICE生成网络采样的退火参数, 训练学习监测数据的真实分布, 从而实现对数据缺失部分的最优填补. 为进一步拓宽所提方法的应用范围, 利用基于流模型的缺失数据生成方法得到的生成数据, 通过建立融合注意力机制的双向长短时记忆网络(Bidirectional long short-term memory with attention, Bi-LSTM-Att)的退化设备预测模型, 实现设备剩余寿命的准确预测. 最后, 通过锂电池退化数据的实例研究, 验证了该方法的有效性和潜在应用价值.
针对缺失数据生成模型精度低和训练速度慢的问题, 本文基于流模型框架提出了一种改进非线性独立成分估计(Nonlinear independent components estimation, NICE)的缺失时间序列生成方法. 该方法依靠流模型框架生成模型精度高、训练过程速度快的优势, 并结合粒子群优化算法(Particle swarm optimization, PSO) 优化NICE生成网络采样的退火参数, 训练学习监测数据的真实分布, 从而实现对数据缺失部分的最优填补. 为进一步拓宽所提方法的应用范围, 利用基于流模型的缺失数据生成方法得到的生成数据, 通过建立融合注意力机制的双向长短时记忆网络(Bidirectional long short-term memory with attention, Bi-LSTM-Att)的退化设备预测模型, 实现设备剩余寿命的准确预测. 最后, 通过锂电池退化数据的实例研究, 验证了该方法的有效性和潜在应用价值.

2023, 49(1): 197-209.
doi: 10.16383/j.aas.c220142
摘要:
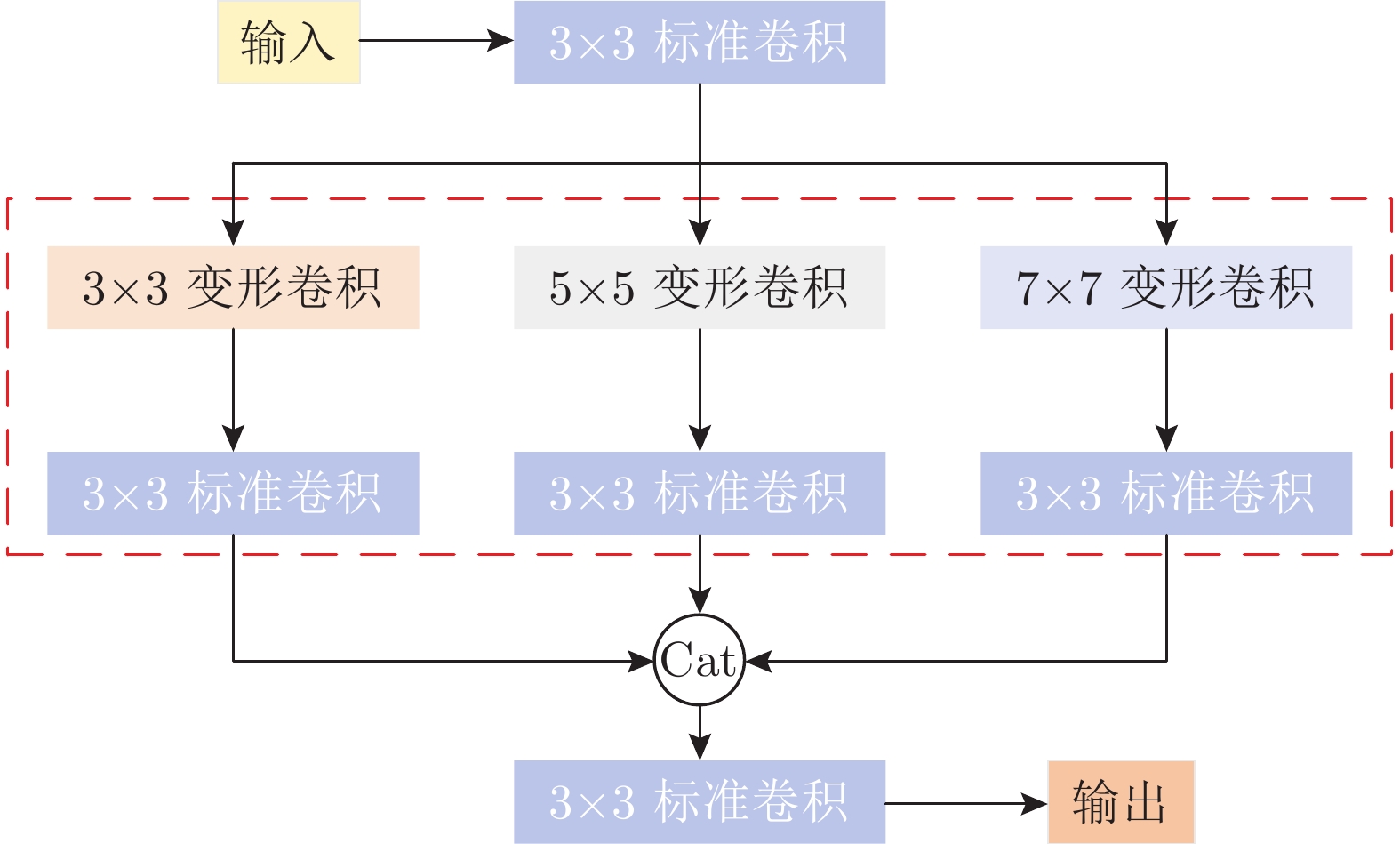
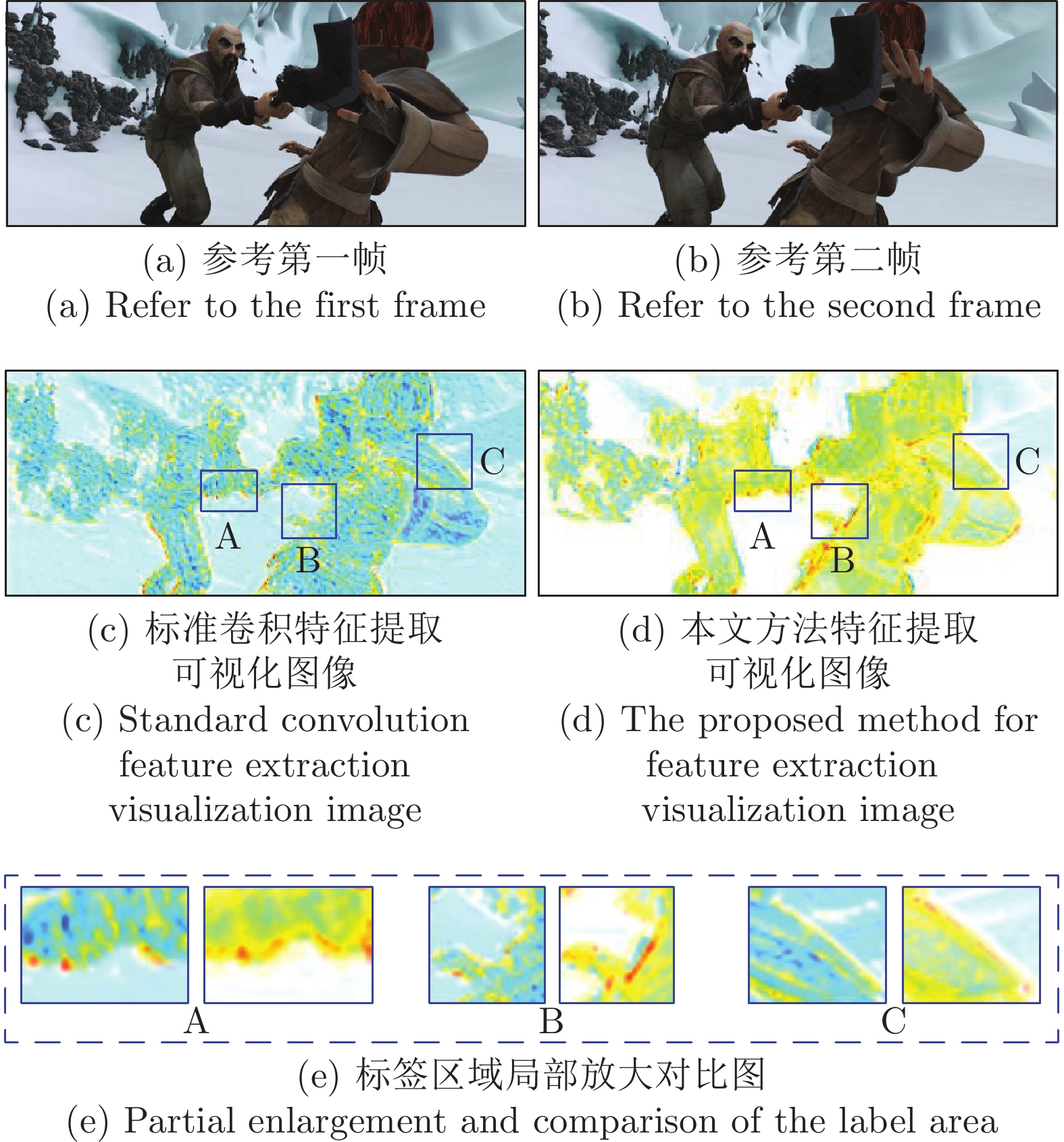
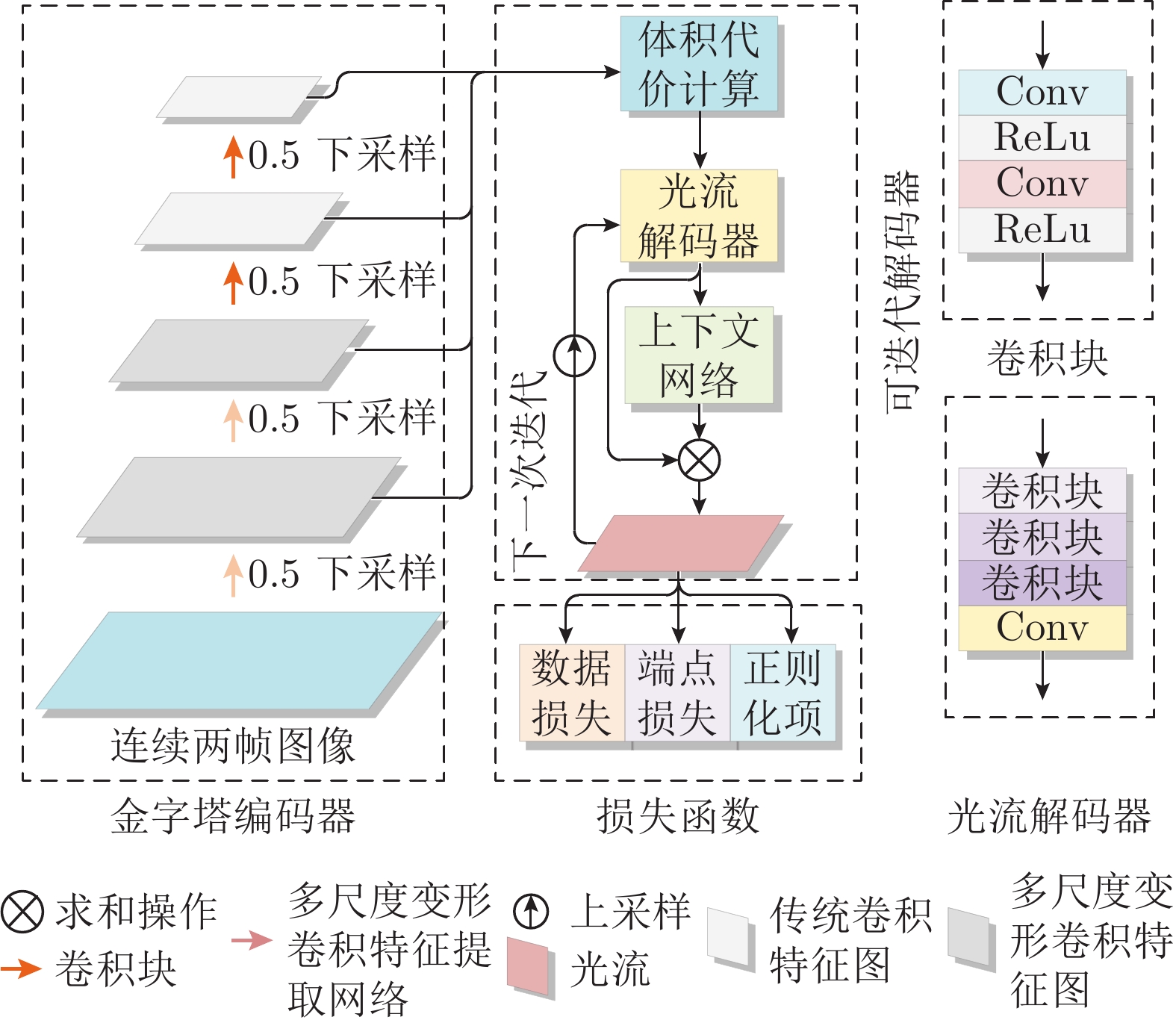
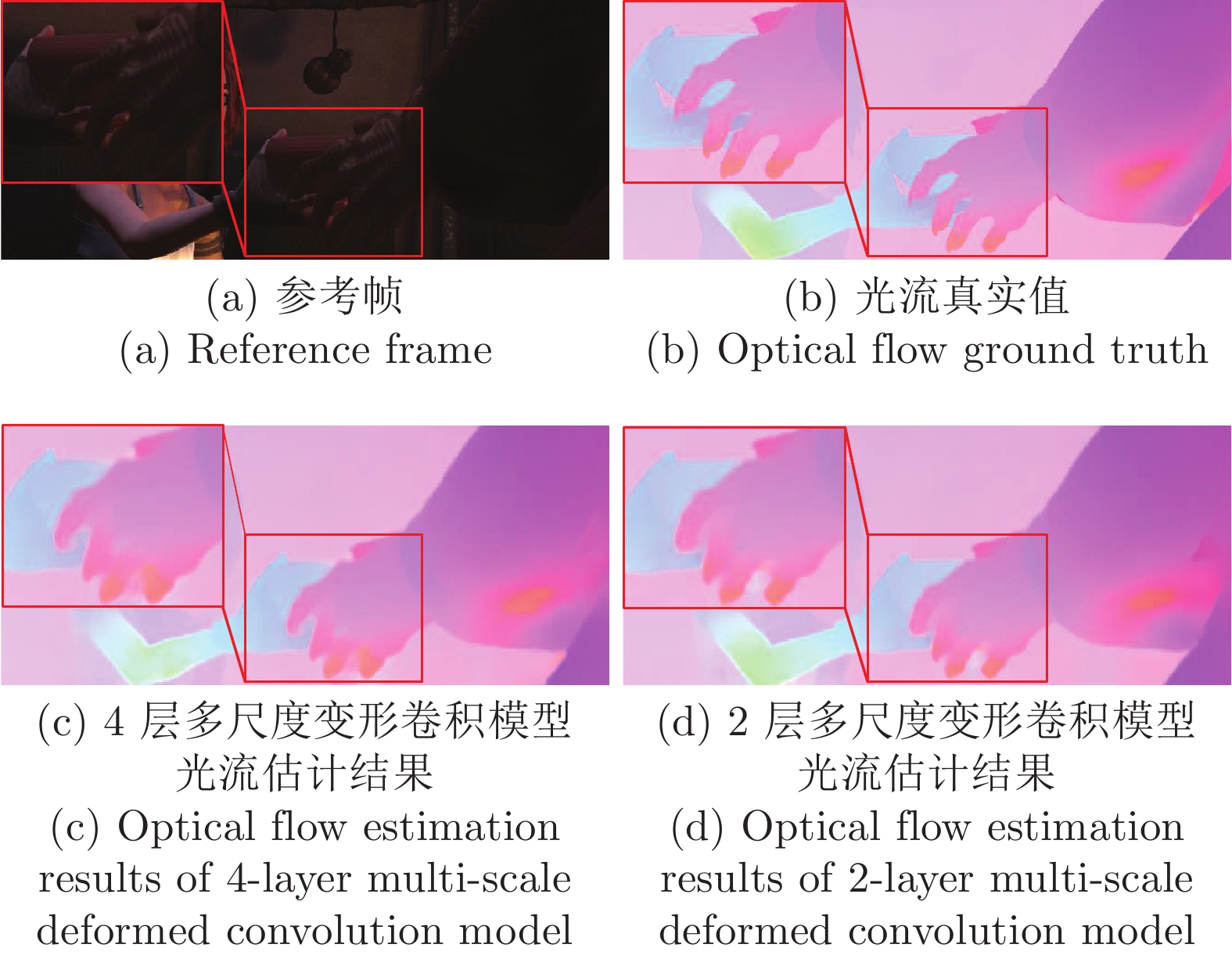
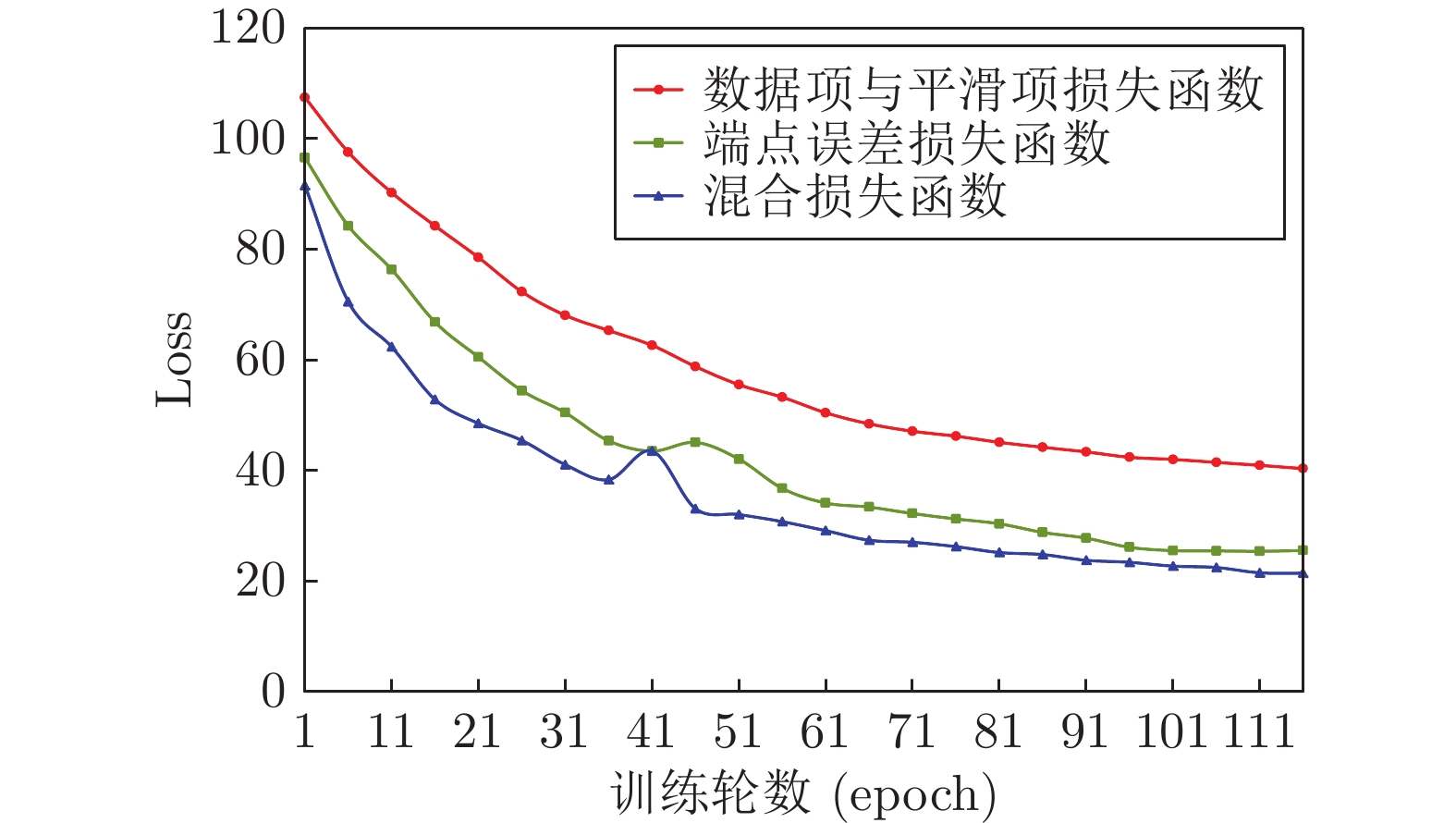
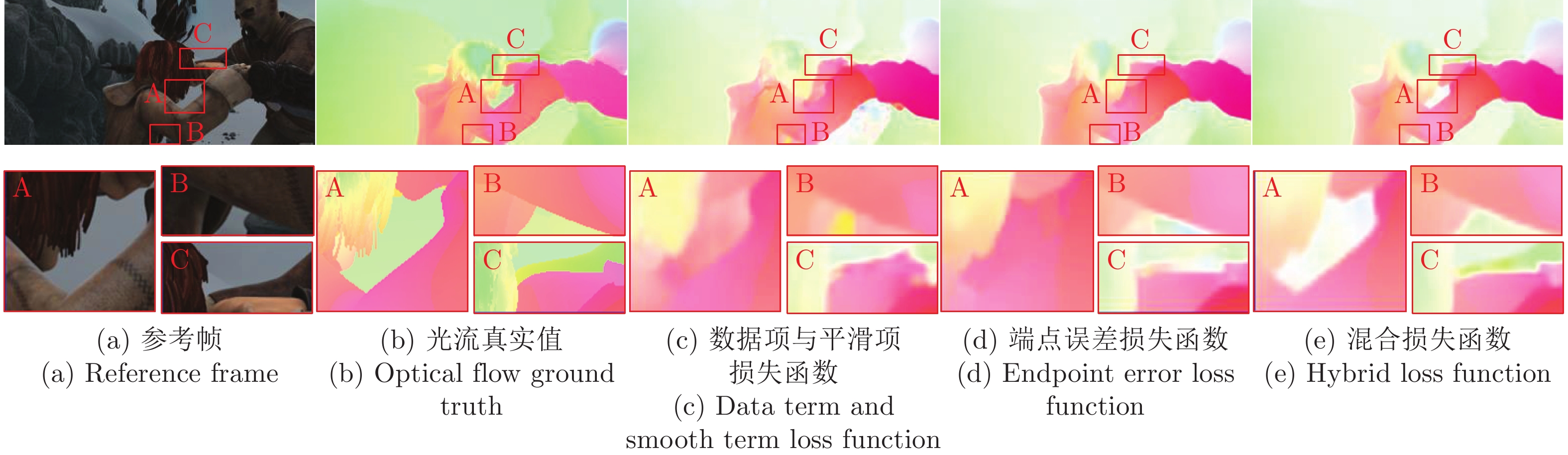
针对现有深度学习光流计算方法的运动边缘模糊问题, 提出了一种基于多尺度变形卷积的特征金字塔光流计算方法. 首先, 构造基于多尺度变形卷积的特征提取模型, 显著提高图像边缘区域特征提取的准确性; 然后, 将多尺度变形卷积特征提取模型与特征金字塔光流计算网络耦合, 提出一种基于多尺度变形卷积的特征金字塔光流计算模型; 最后, 设计一种结合图像与运动边缘约束的混合损失函数, 通过指导模型学习更加精准的边缘信息, 克服了光流计算运动边缘模糊问题. 分别采用 MPI-Sintel 和 KITTI2015 测试图像集对该方法与代表性的深度学习光流计算方法进行综合对比分析. 实验结果表明, 该方法具有更高的光流计算精度, 有效解决了光流计算的边缘模糊问题.
针对现有深度学习光流计算方法的运动边缘模糊问题, 提出了一种基于多尺度变形卷积的特征金字塔光流计算方法. 首先, 构造基于多尺度变形卷积的特征提取模型, 显著提高图像边缘区域特征提取的准确性; 然后, 将多尺度变形卷积特征提取模型与特征金字塔光流计算网络耦合, 提出一种基于多尺度变形卷积的特征金字塔光流计算模型; 最后, 设计一种结合图像与运动边缘约束的混合损失函数, 通过指导模型学习更加精准的边缘信息, 克服了光流计算运动边缘模糊问题. 分别采用 MPI-Sintel 和 KITTI2015 测试图像集对该方法与代表性的深度学习光流计算方法进行综合对比分析. 实验结果表明, 该方法具有更高的光流计算精度, 有效解决了光流计算的边缘模糊问题.




2023, 49(1): 210-218.
doi: 10.16383/j.aas.c220011
摘要:
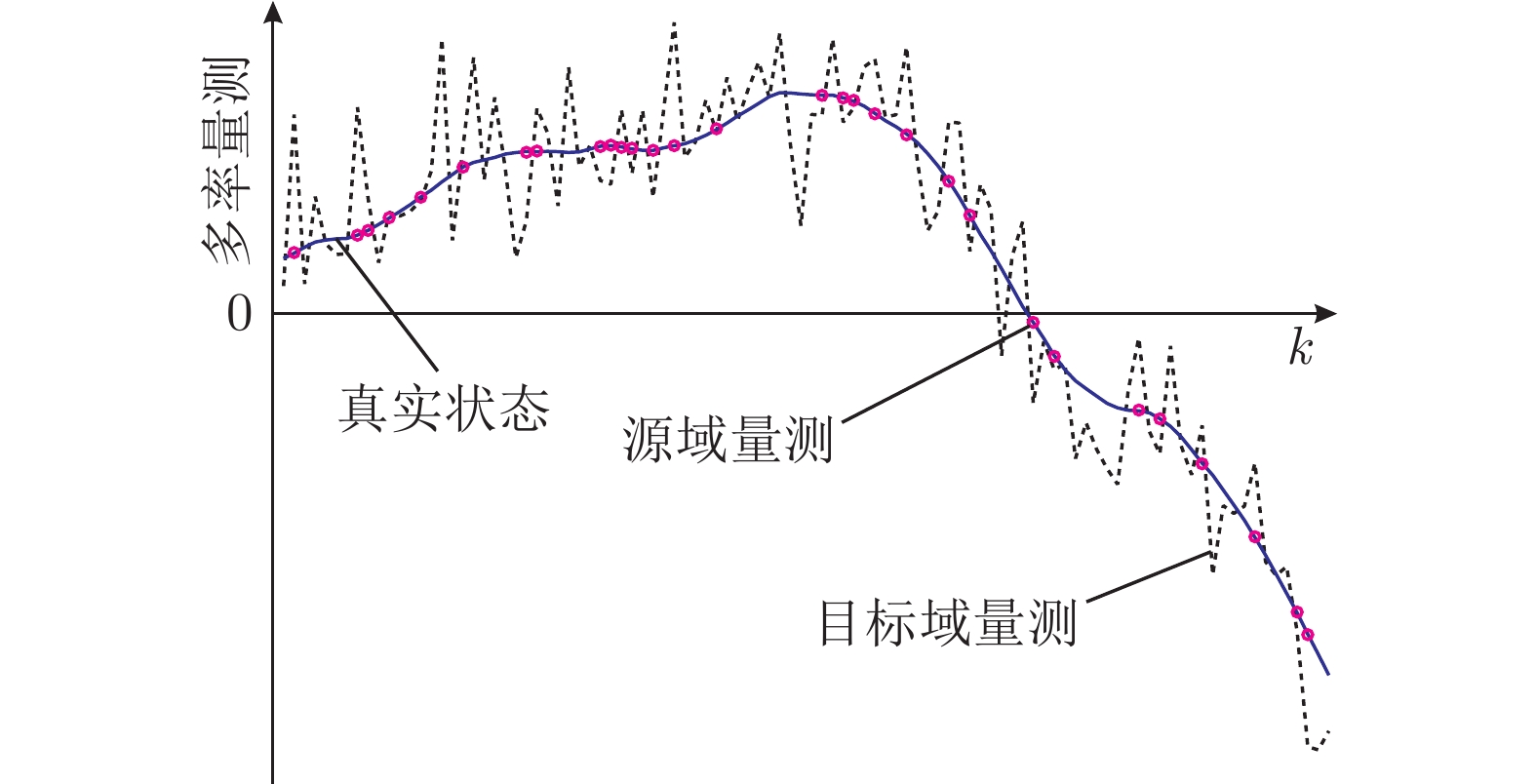
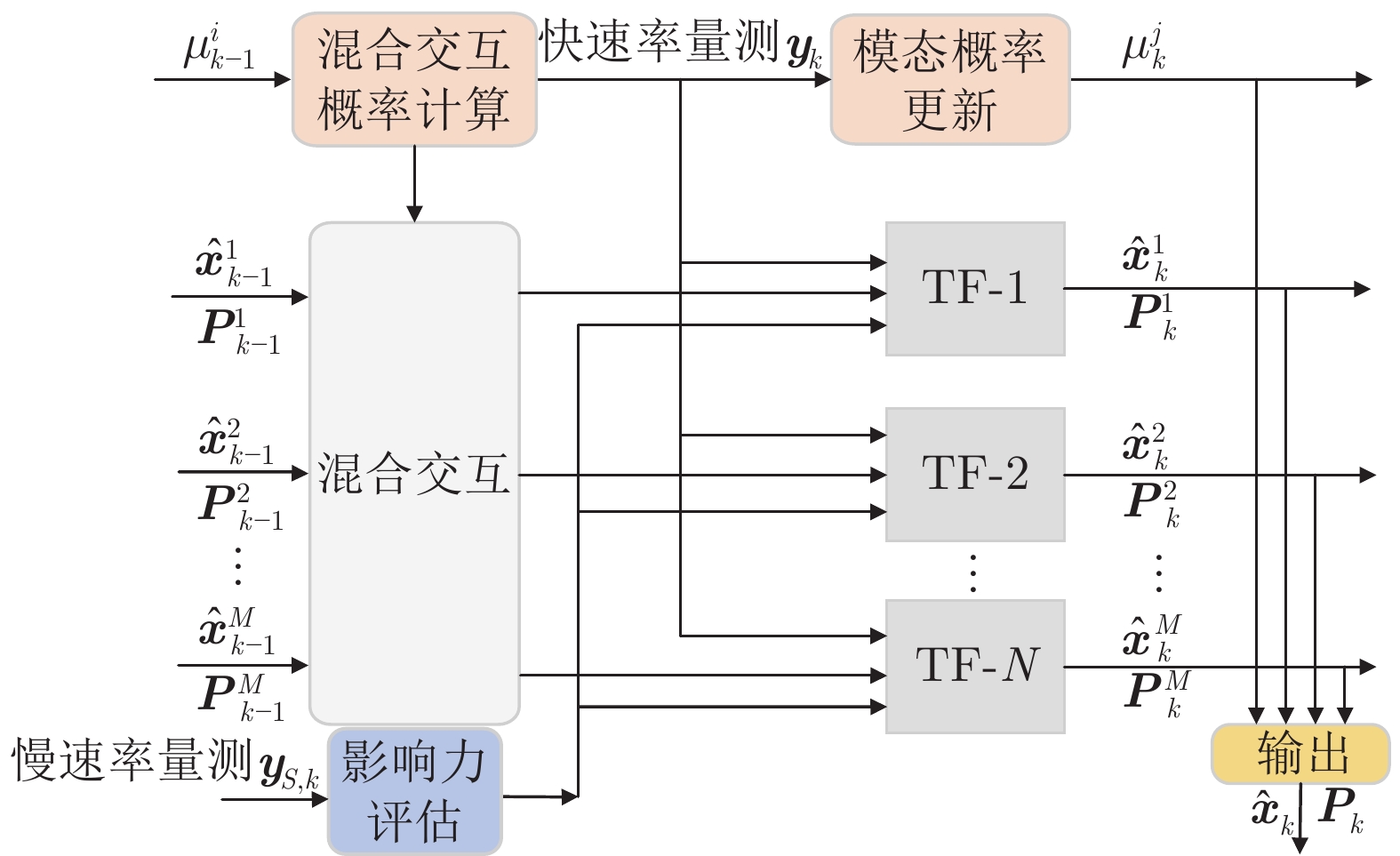
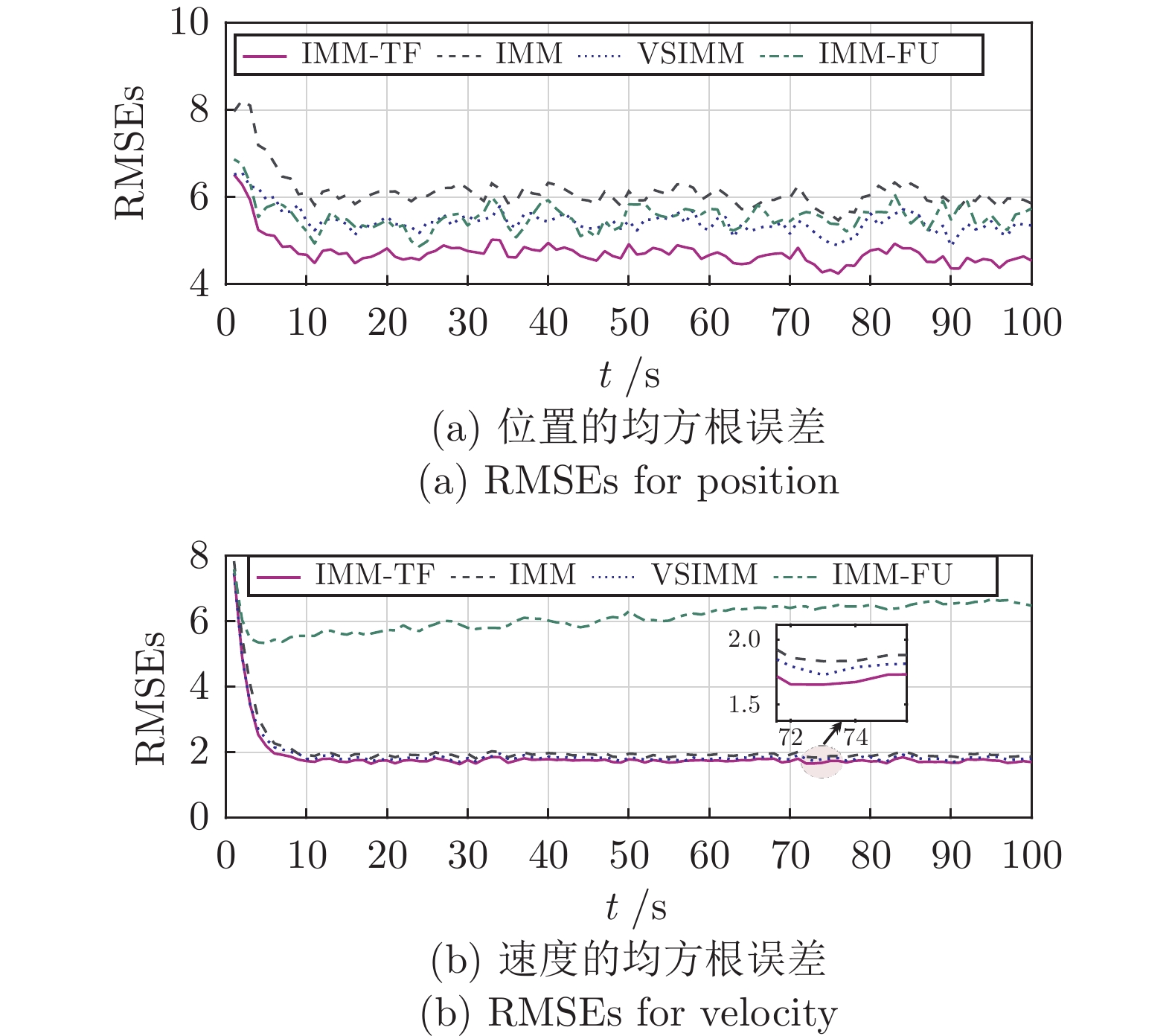
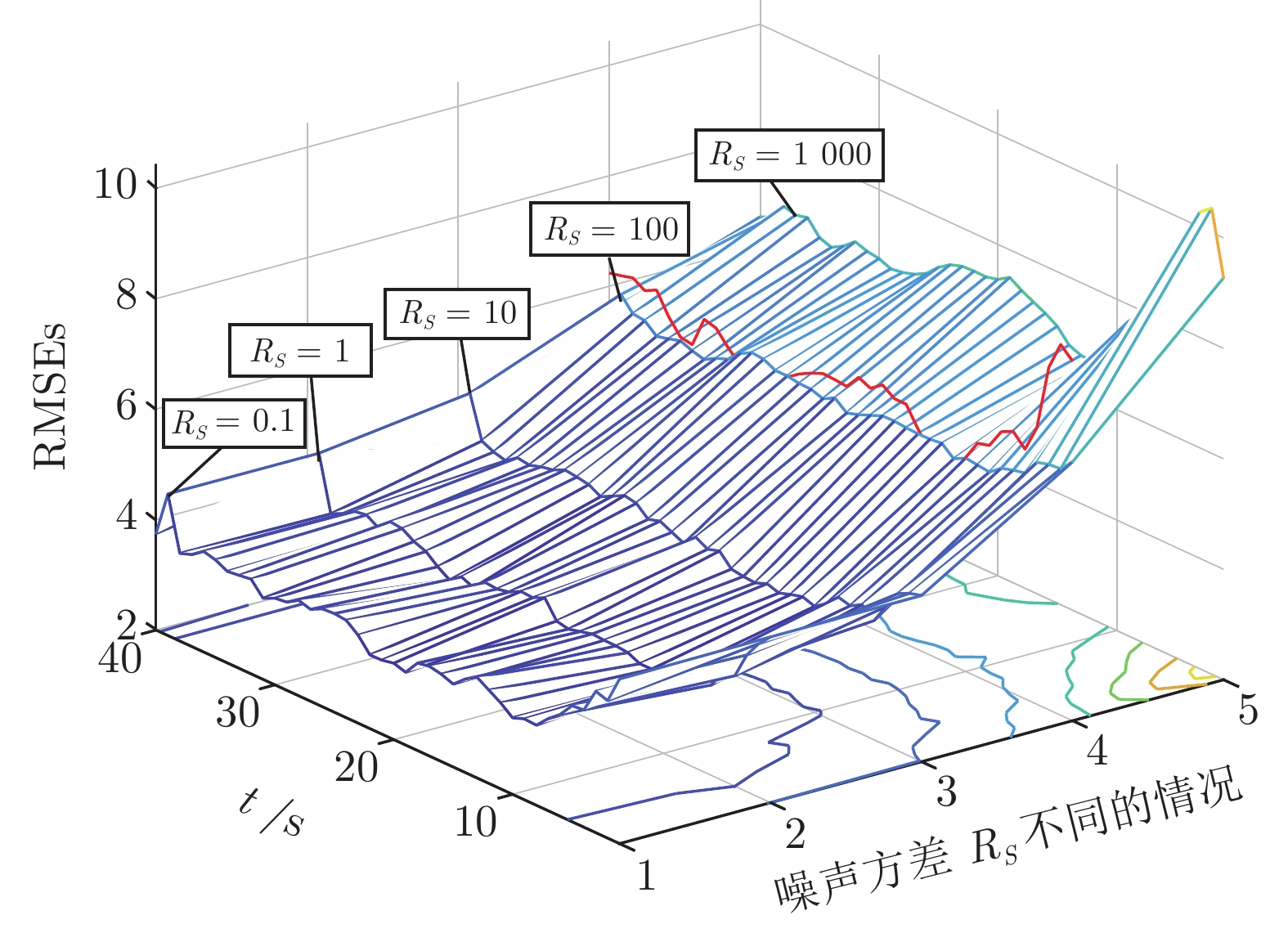
实际工业过程中, 量测数据除了在线仪表采集的快速率数据, 还有离线化验等慢速率辅助量测数据. 为了更好地利用离线化验数据, 增加在线估计的精度, 针对随机跳变系统, 引入迁移学习思想, 提出迁移交互多模型估计 (Transfer interacting multiple model state estimator, IMM-TF) 新策略. 首先, 将离线化验数据的边缘分布作为可以迁移的知识, 迁移到贝叶斯后验分布, 实现辅助量测数据的充分利用. 其次, 利用KL (Kullback-Leibler) 散度度量知识迁移前后任务间的差异性, 求解最优的贝叶斯迁移估计器. 同时, 结合慢速率量测, 利用平滑策略获取待迁移的估计值, 解决多率量测下的迁移估计难题. 然后, 利用影响力函数构建辅助量测数据与估计性能之间的解析关系, 从而对迁移效果进行定量评价. 最后, 通过在目标跟踪实例中的应用, 表明所提方法的有效性及优越性.
实际工业过程中, 量测数据除了在线仪表采集的快速率数据, 还有离线化验等慢速率辅助量测数据. 为了更好地利用离线化验数据, 增加在线估计的精度, 针对随机跳变系统, 引入迁移学习思想, 提出迁移交互多模型估计 (Transfer interacting multiple model state estimator, IMM-TF) 新策略. 首先, 将离线化验数据的边缘分布作为可以迁移的知识, 迁移到贝叶斯后验分布, 实现辅助量测数据的充分利用. 其次, 利用KL (Kullback-Leibler) 散度度量知识迁移前后任务间的差异性, 求解最优的贝叶斯迁移估计器. 同时, 结合慢速率量测, 利用平滑策略获取待迁移的估计值, 解决多率量测下的迁移估计难题. 然后, 利用影响力函数构建辅助量测数据与估计性能之间的解析关系, 从而对迁移效果进行定量评价. 最后, 通过在目标跟踪实例中的应用, 表明所提方法的有效性及优越性.


2023, 49(1): 219-228.
doi: 10.16383/j.aas.c220165
摘要:
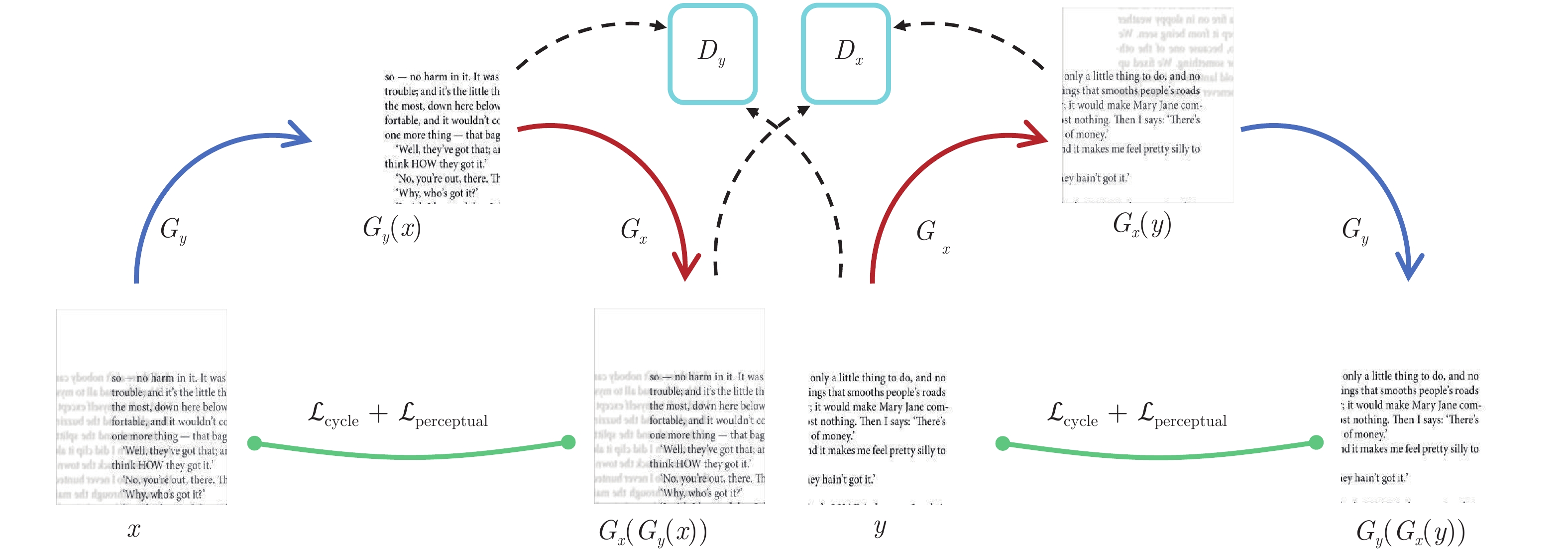
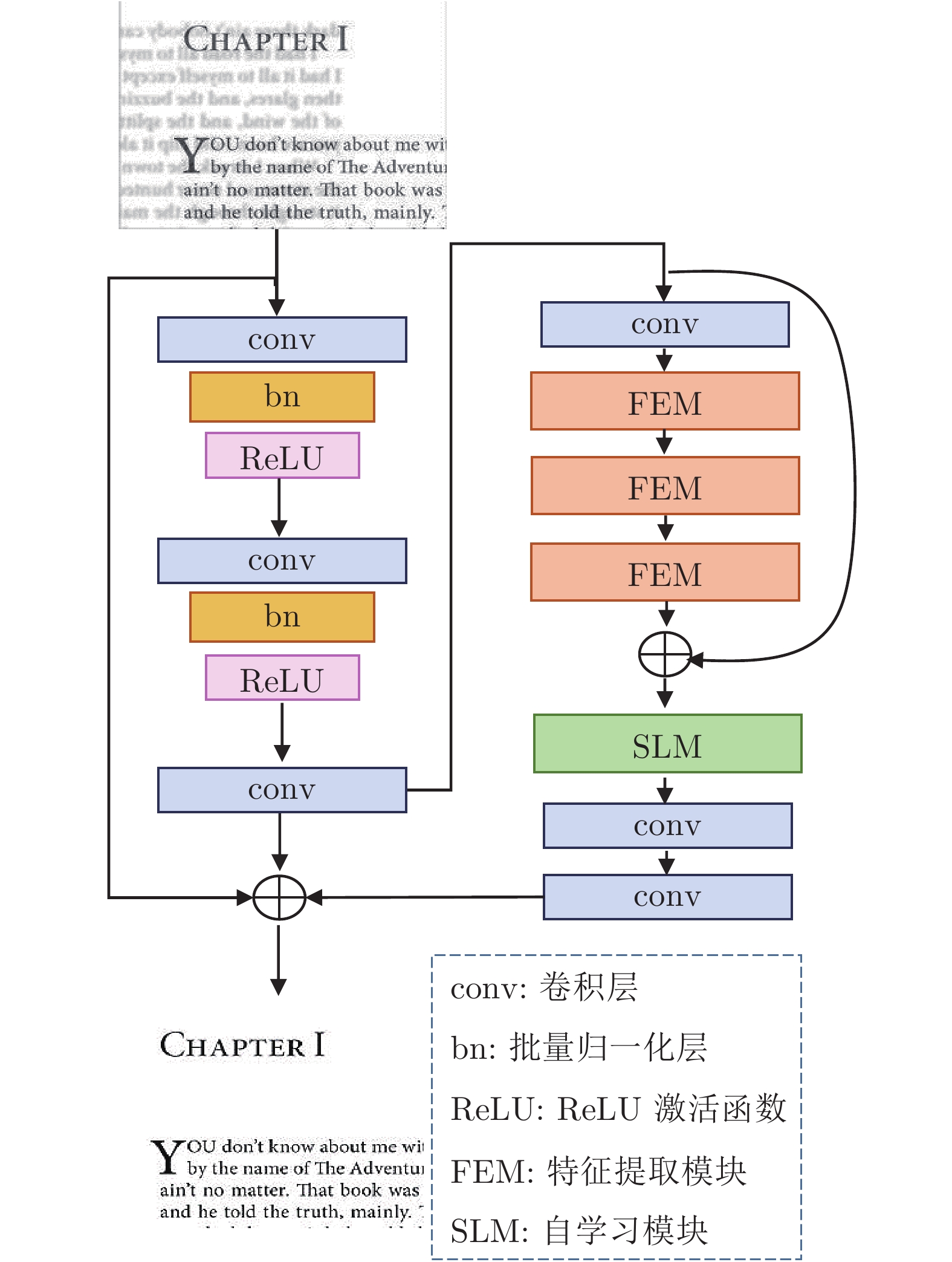
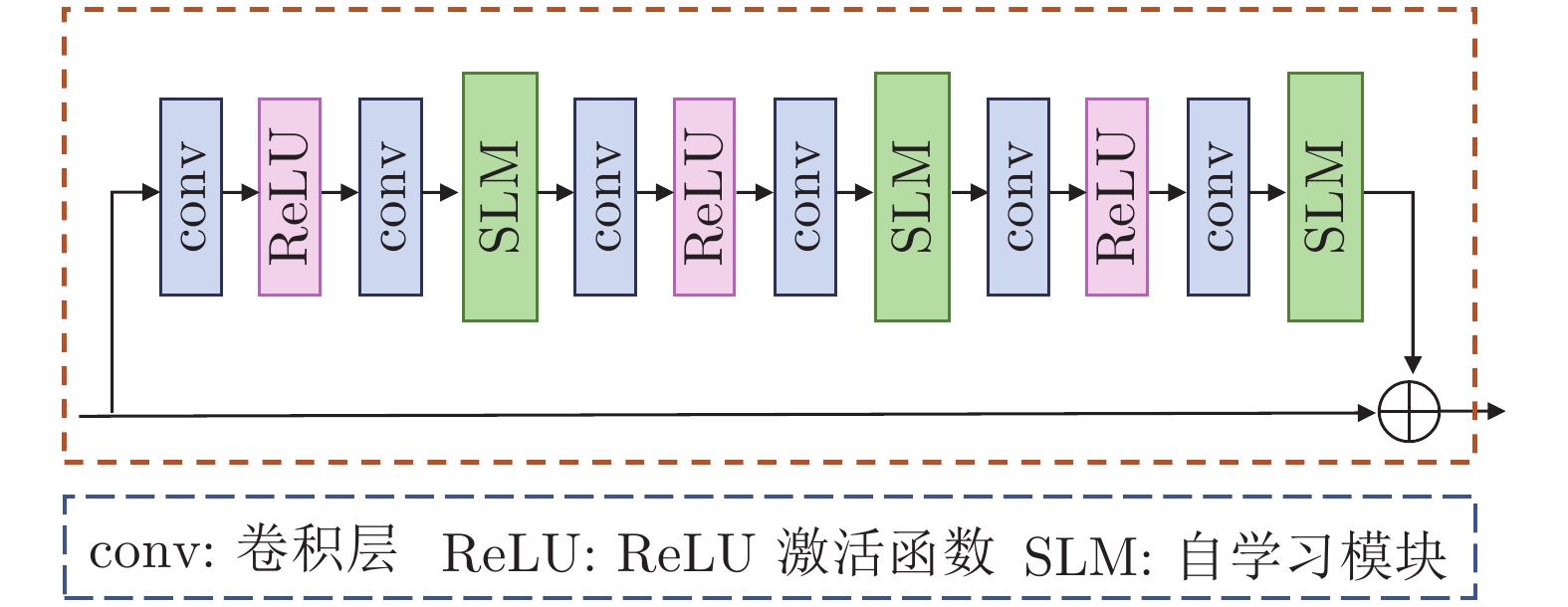
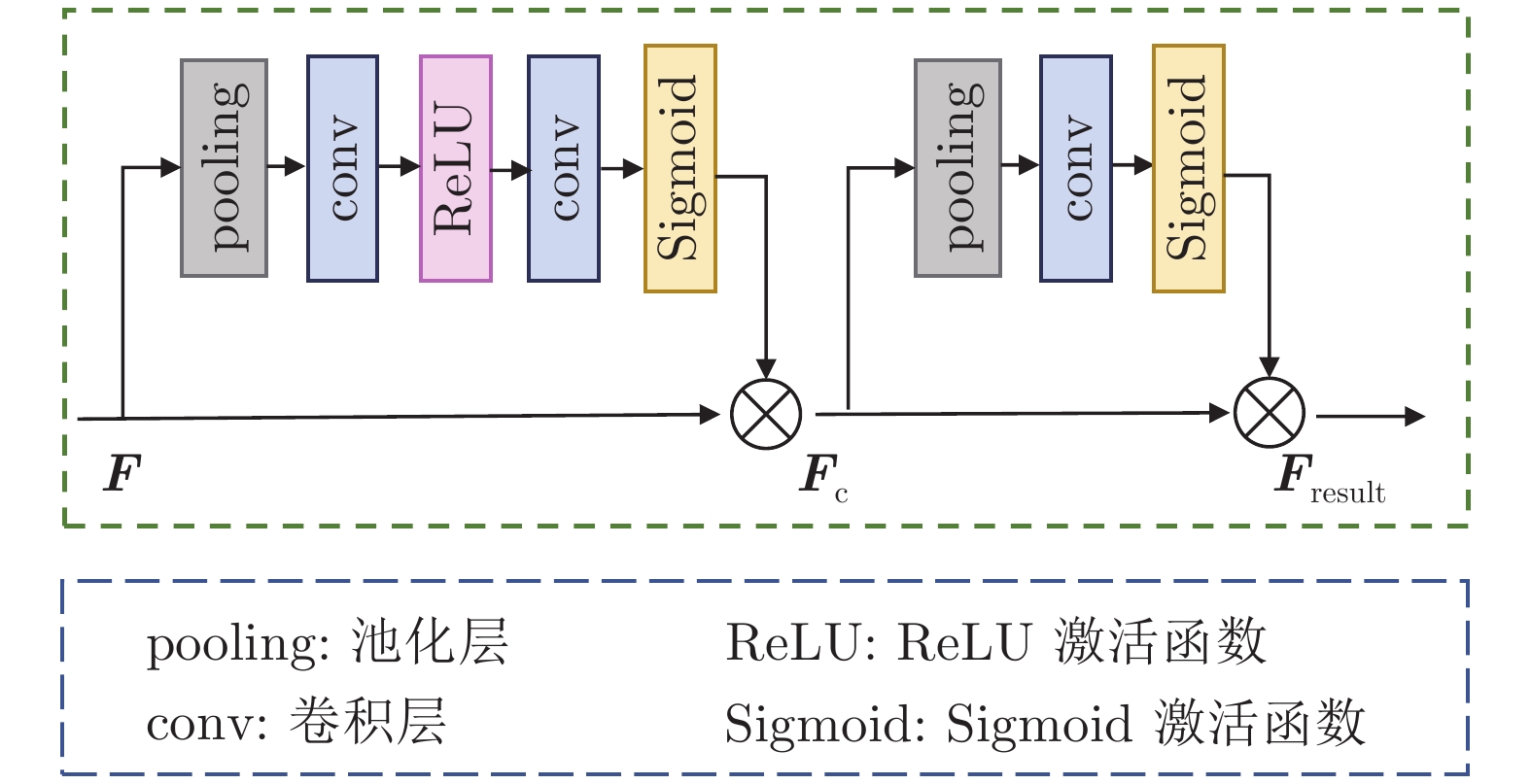
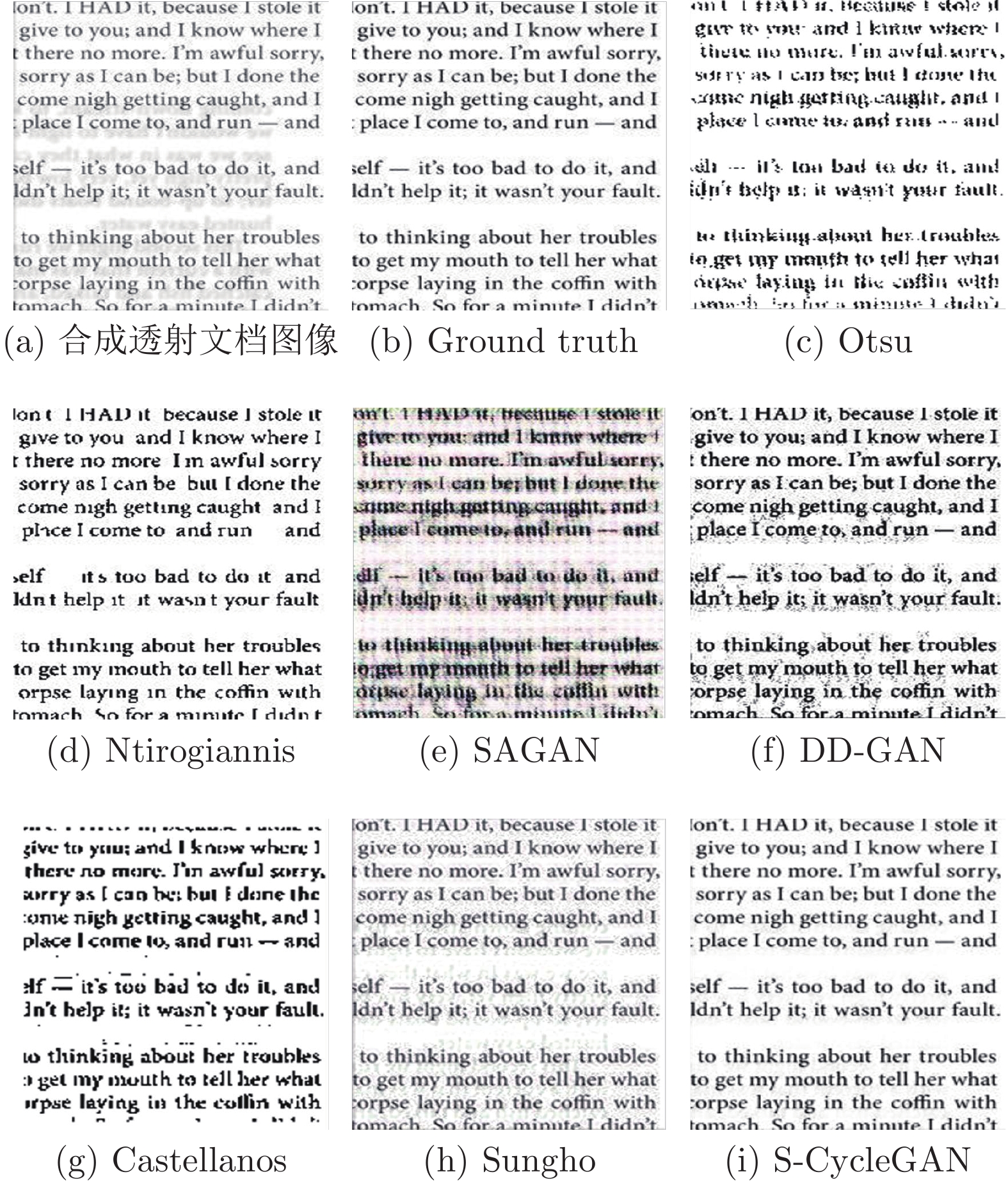
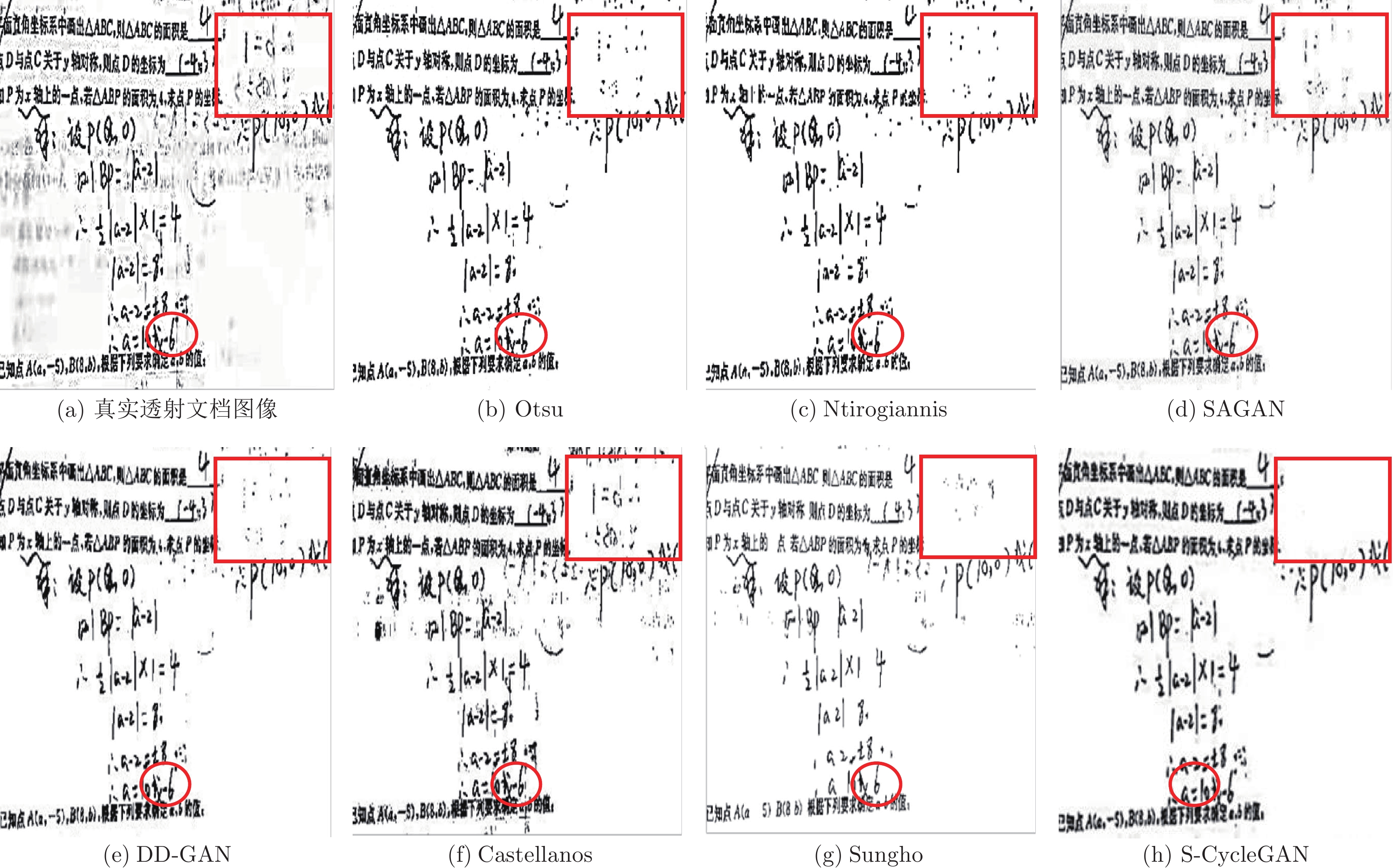
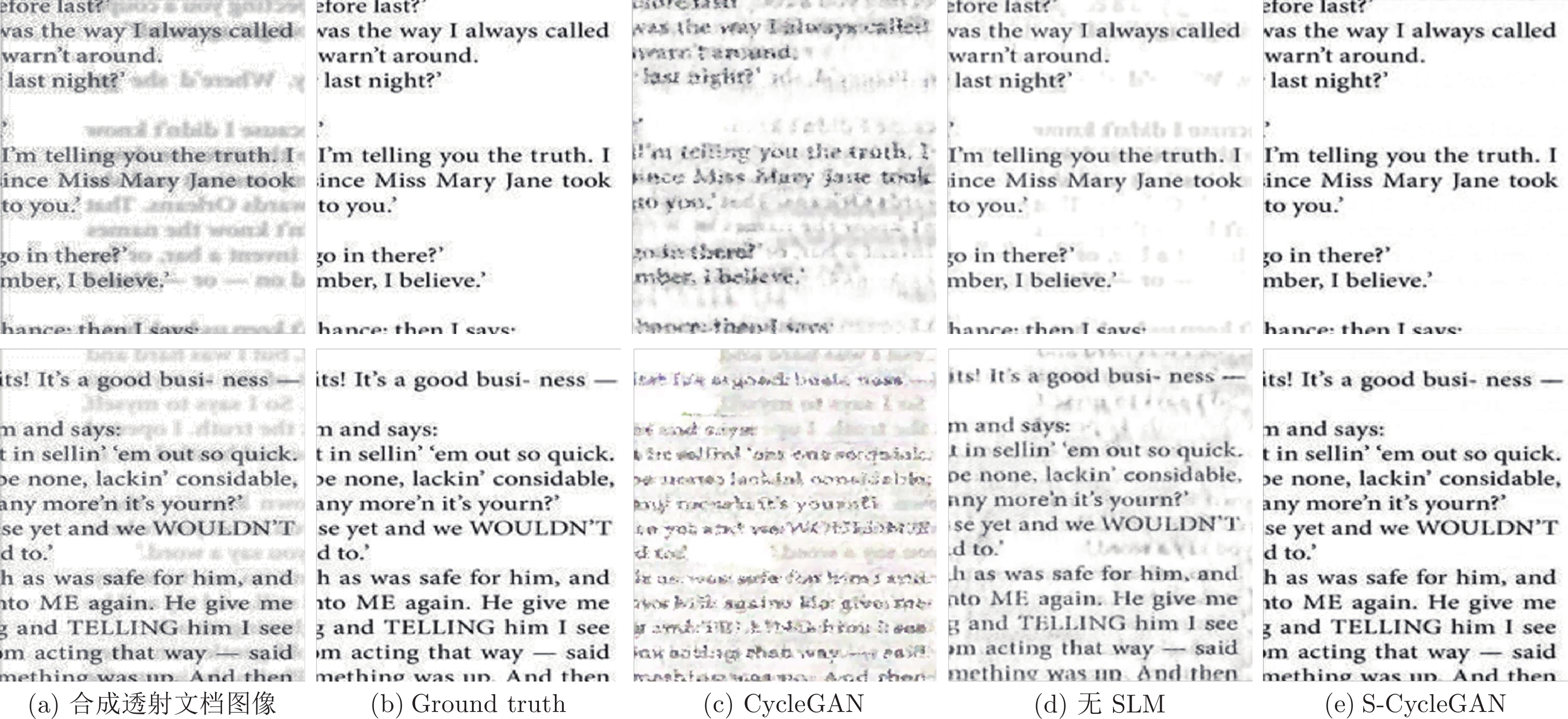
现有基于学习的单幅透射图像恢复方法常需要大量成对的标签数据来训练模型, 因缺乏成对图像集的监督约束, 致使透射图像恢复效果欠佳, 限制了其实用性. 提出了一种基于自监督学习的单幅透射图像恢复方法, 利用循环一致性生成对抗网络的循环结构和约束转移学习能力实现非成对图像的模型训练, 通过设计自学习模块, 从大规模的无监督数据中挖掘自身的监督信息对网络进行训练, 以此形成有效的从浅层到深层的特征提取, 提高透射图像正面内容的纹理、边缘等细节信息恢复质量, 实现单幅图像的透射去除. 实验结果表明, 该方法在合成图像数据集、公共图像数据集以及真实图像数据集上都取得了较好的透射图像恢复结果.
现有基于学习的单幅透射图像恢复方法常需要大量成对的标签数据来训练模型, 因缺乏成对图像集的监督约束, 致使透射图像恢复效果欠佳, 限制了其实用性. 提出了一种基于自监督学习的单幅透射图像恢复方法, 利用循环一致性生成对抗网络的循环结构和约束转移学习能力实现非成对图像的模型训练, 通过设计自学习模块, 从大规模的无监督数据中挖掘自身的监督信息对网络进行训练, 以此形成有效的从浅层到深层的特征提取, 提高透射图像正面内容的纹理、边缘等细节信息恢复质量, 实现单幅图像的透射去除. 实验结果表明, 该方法在合成图像数据集、公共图像数据集以及真实图像数据集上都取得了较好的透射图像恢复结果.