2022年 第48卷 第4期
2022, 48(4): 935-956.
doi: 10.16383/j.aas.c210161
摘要:
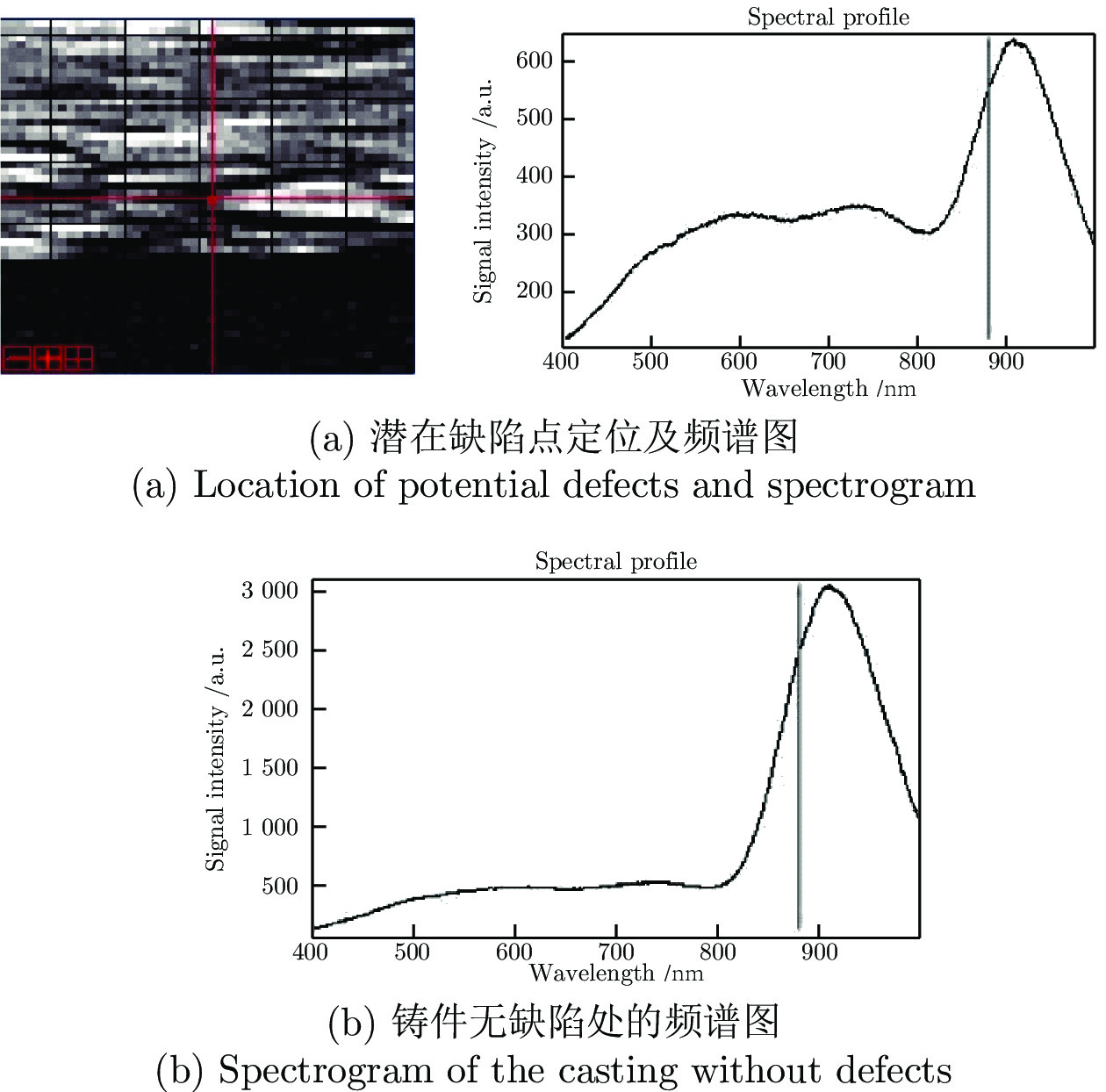
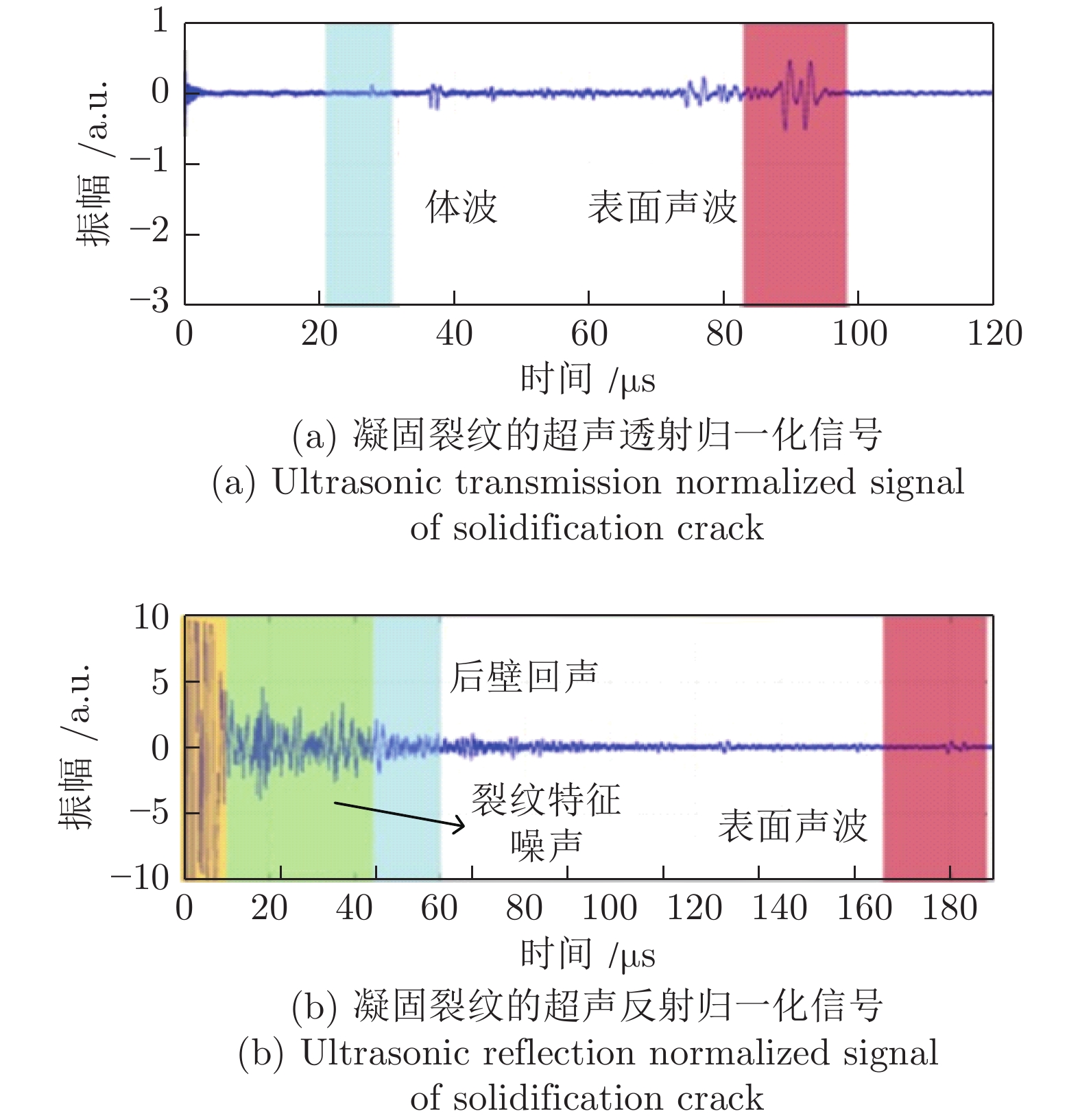
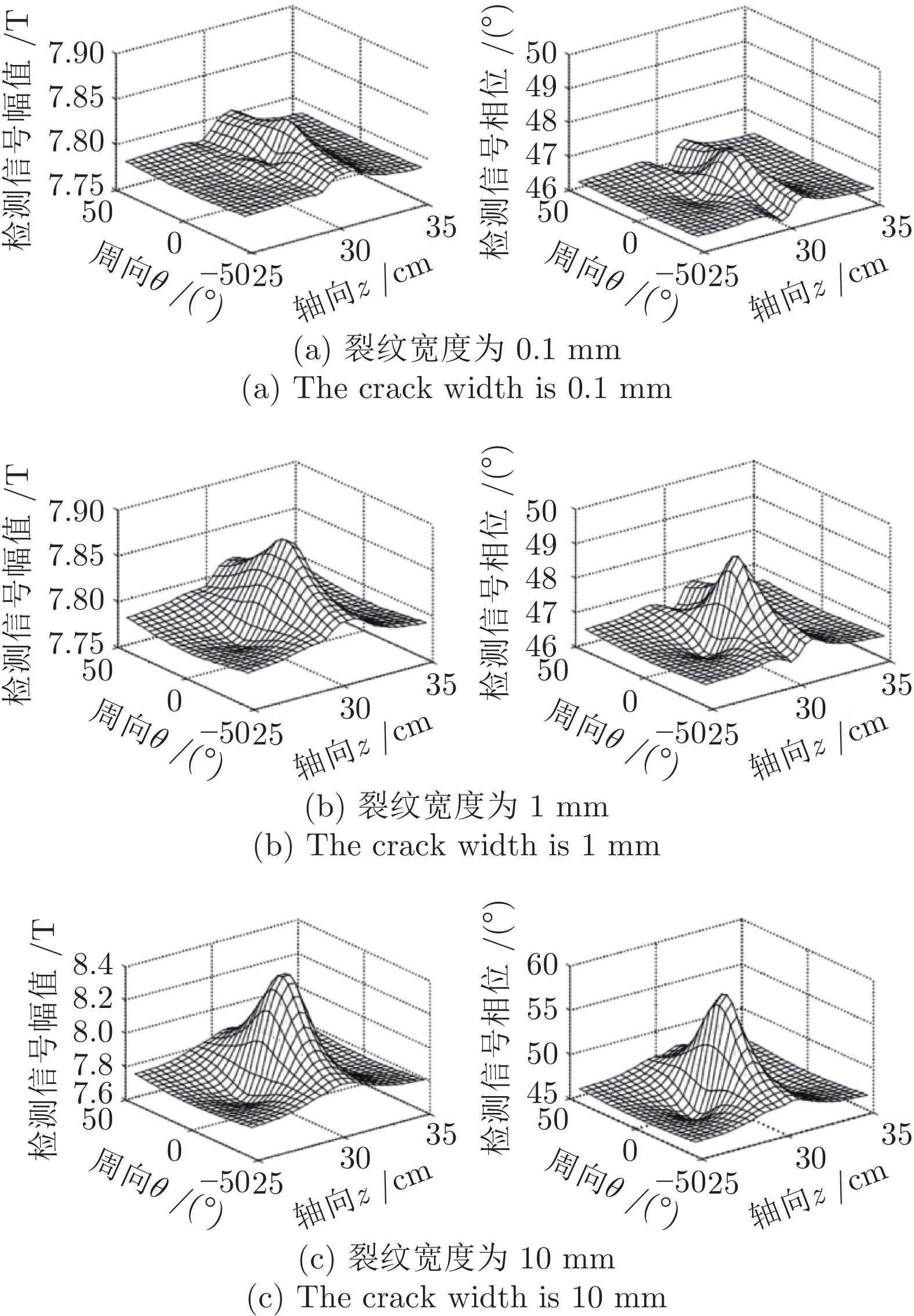
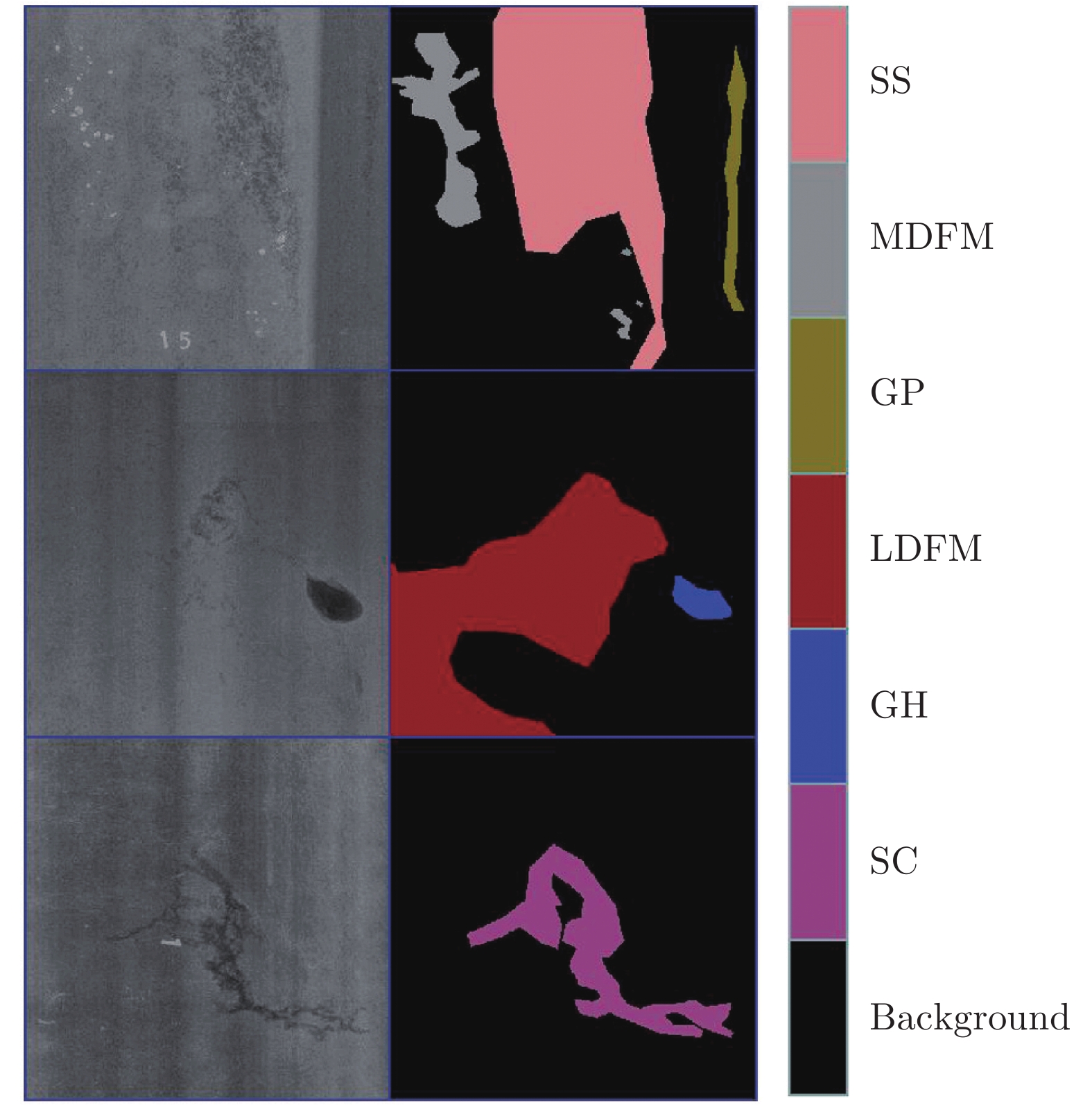
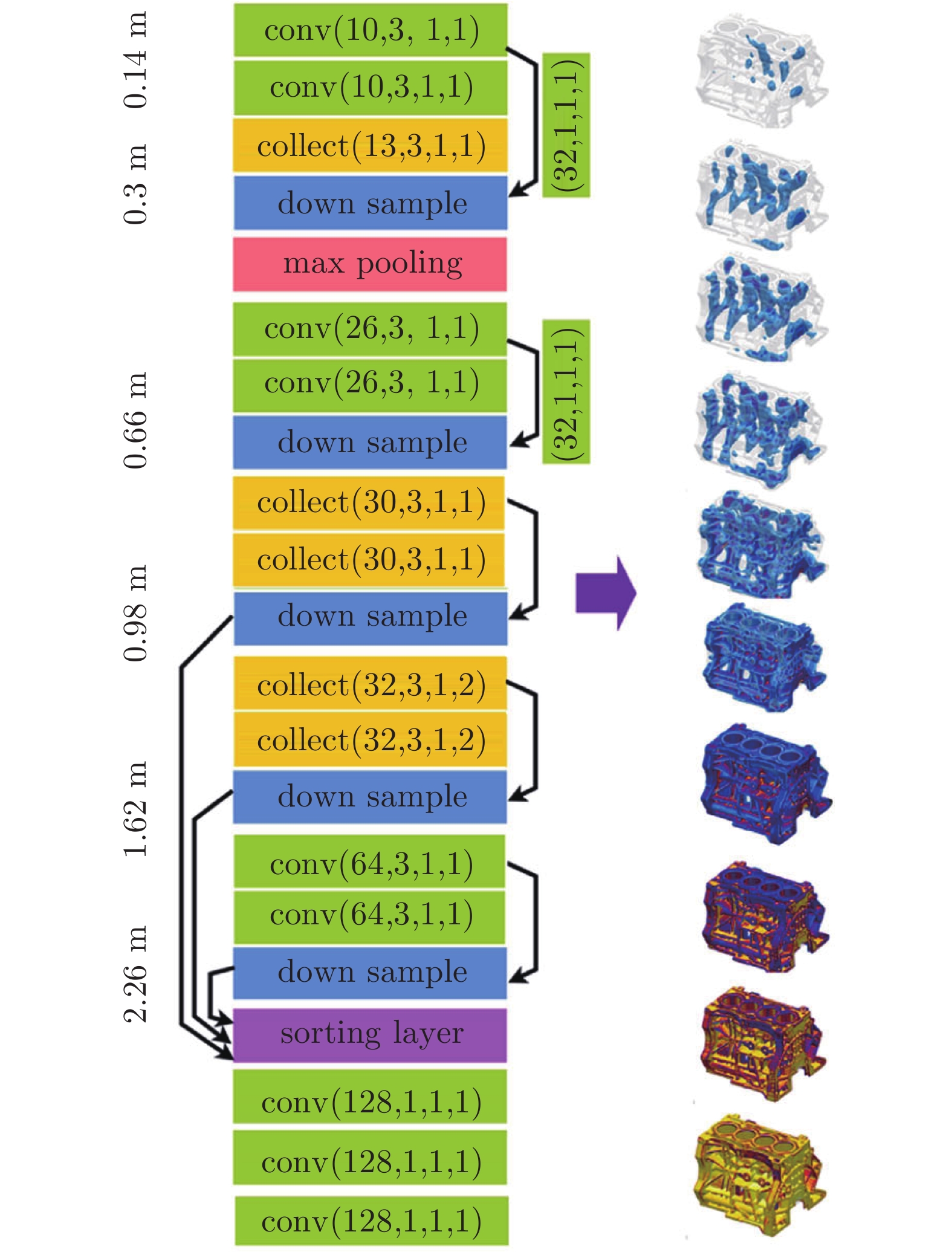
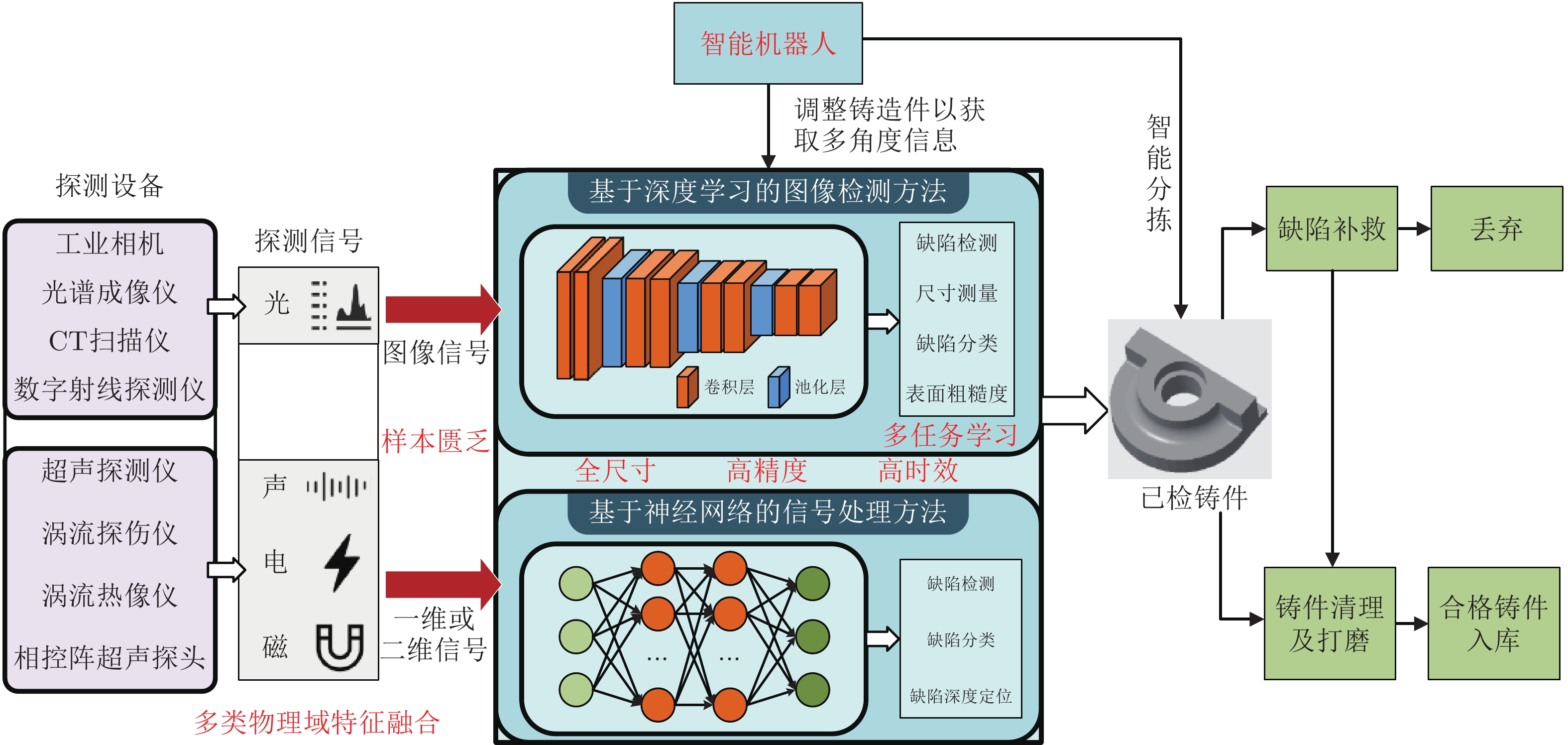
高端装备制造业是国民经济的支柱产业, 是推动工业转型升级的引擎, 发挥着举足轻重的作用. 而铸造产业一直是人类现代生产生活中重要的、不可替代的产业, 铸件产品既是工业制造产品, 也是大型机械的组成部分. 随着经济水平和工业自动化程度的不断提升, 人们对于铸件的需求量呈指数爆炸式增长, 铸件价值辐射到各行各业. 与此同时, 铸件在铸造、服役过程中经常会出现各种缺陷, 而传统低效的人工检测方法难以保障工业界对中高端铸件的性能需求. 因此亟需对铸件检测技术进行革新. 本文首先对铸件铸造过程以及服役过程中各类缺陷的形成机理进行分析. 然后阐述了基于声学、光学、电磁学等主流检测技术及其常规信号处理方法、磁粉检测技术与渗透检测技术等其他检测技术, 并对近年来新兴的基于神经网络的信号处理方法进行了说明. 在此基础上, 分析了近年来铸件缺陷无损检测技术以及基于神经网络的信号处理方法的研究现状. 最后, 对铸件缺陷无损检测技术及应用的发展趋势进行了展望.
高端装备制造业是国民经济的支柱产业, 是推动工业转型升级的引擎, 发挥着举足轻重的作用. 而铸造产业一直是人类现代生产生活中重要的、不可替代的产业, 铸件产品既是工业制造产品, 也是大型机械的组成部分. 随着经济水平和工业自动化程度的不断提升, 人们对于铸件的需求量呈指数爆炸式增长, 铸件价值辐射到各行各业. 与此同时, 铸件在铸造、服役过程中经常会出现各种缺陷, 而传统低效的人工检测方法难以保障工业界对中高端铸件的性能需求. 因此亟需对铸件检测技术进行革新. 本文首先对铸件铸造过程以及服役过程中各类缺陷的形成机理进行分析. 然后阐述了基于声学、光学、电磁学等主流检测技术及其常规信号处理方法、磁粉检测技术与渗透检测技术等其他检测技术, 并对近年来新兴的基于神经网络的信号处理方法进行了说明. 在此基础上, 分析了近年来铸件缺陷无损检测技术以及基于神经网络的信号处理方法的研究现状. 最后, 对铸件缺陷无损检测技术及应用的发展趋势进行了展望.



2022, 48(4): 957-979.
doi: 10.16383/j.aas.c220027
摘要:
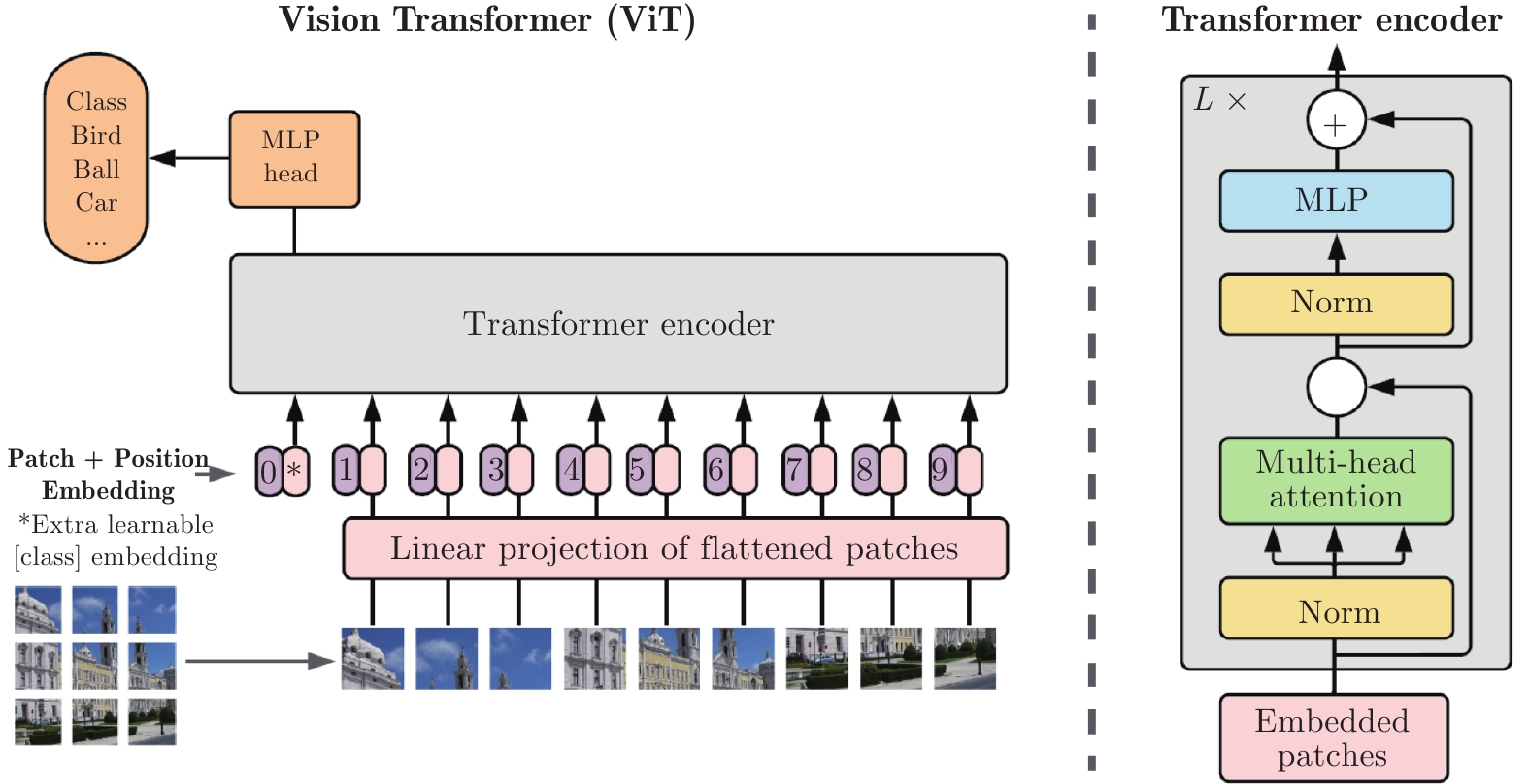
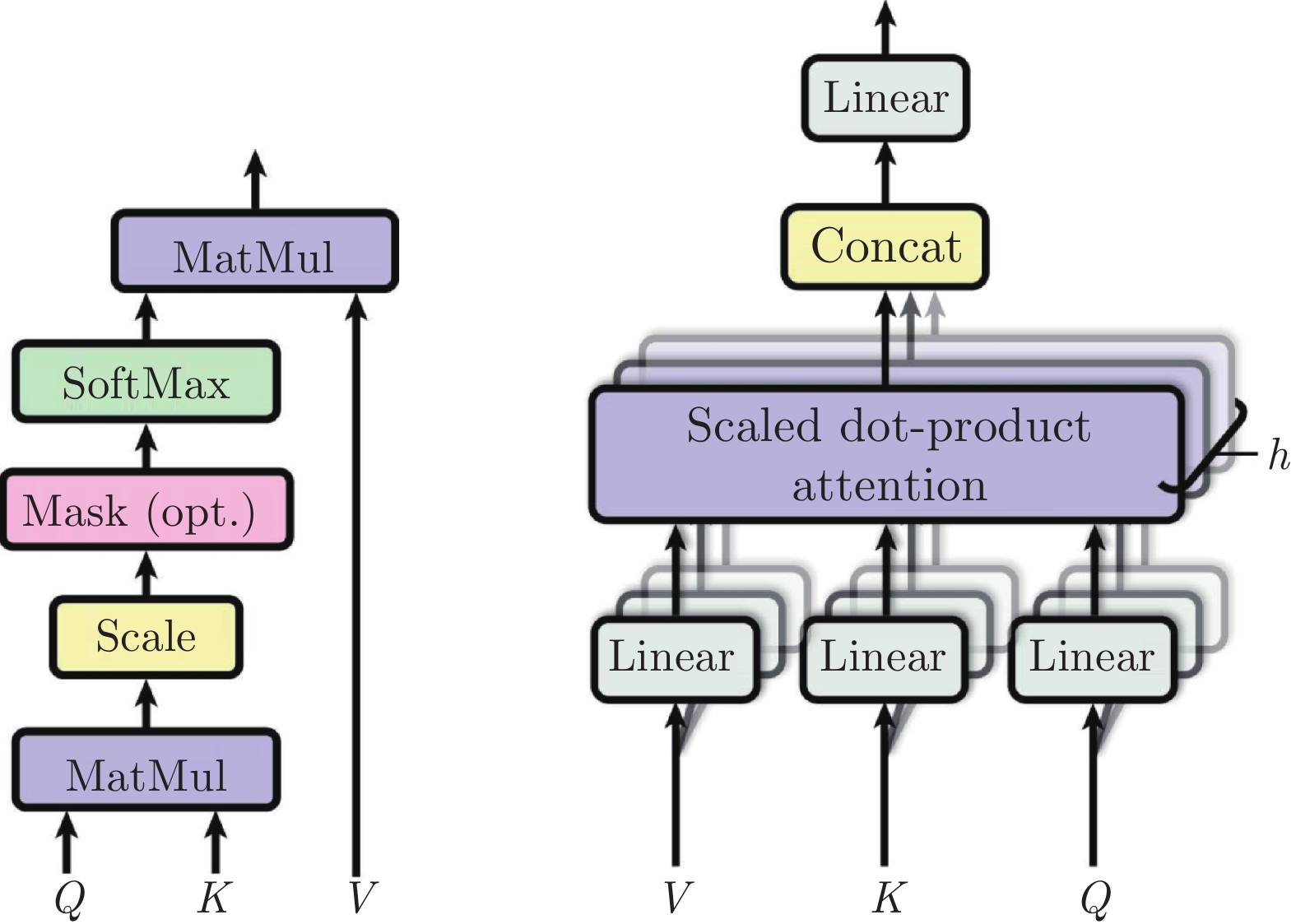
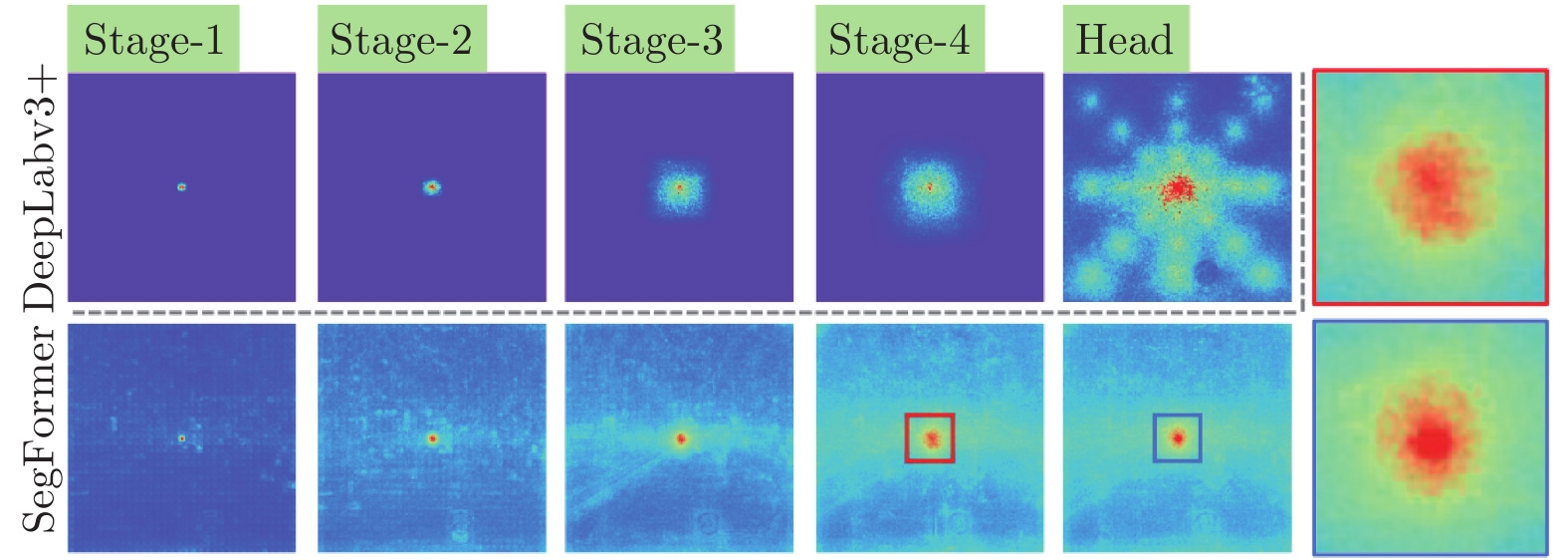
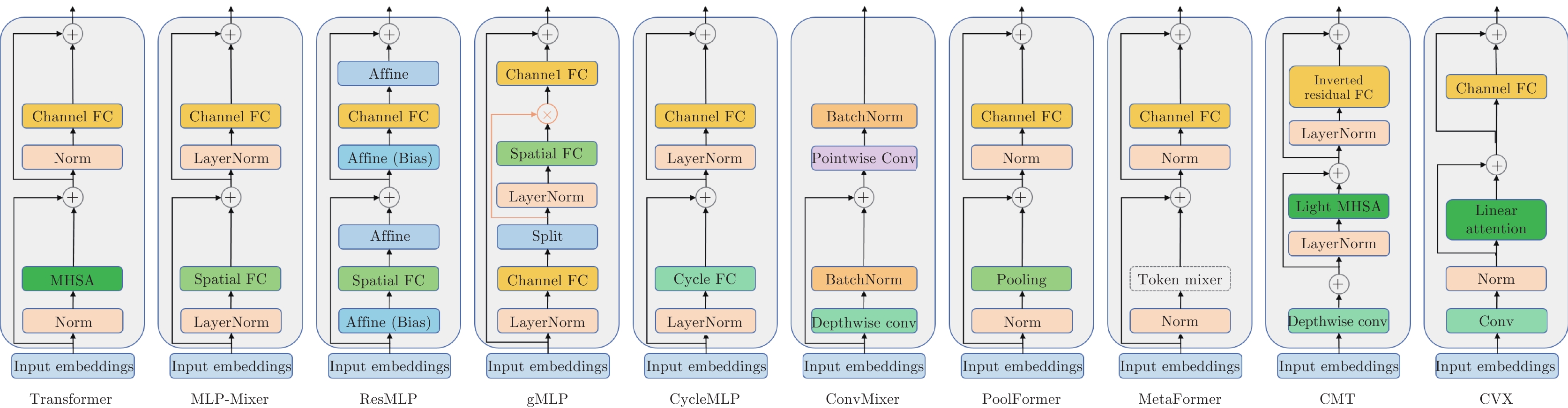
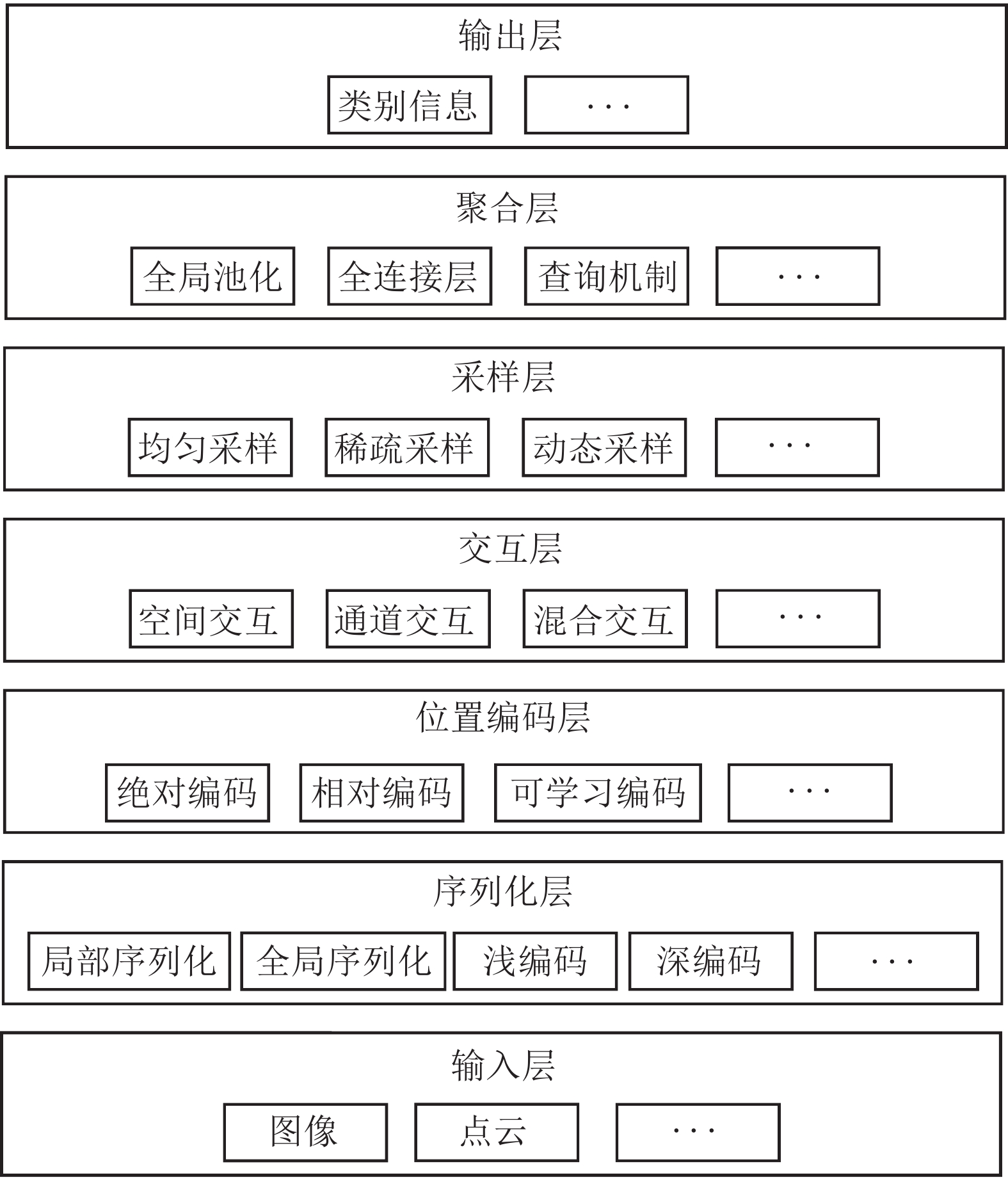
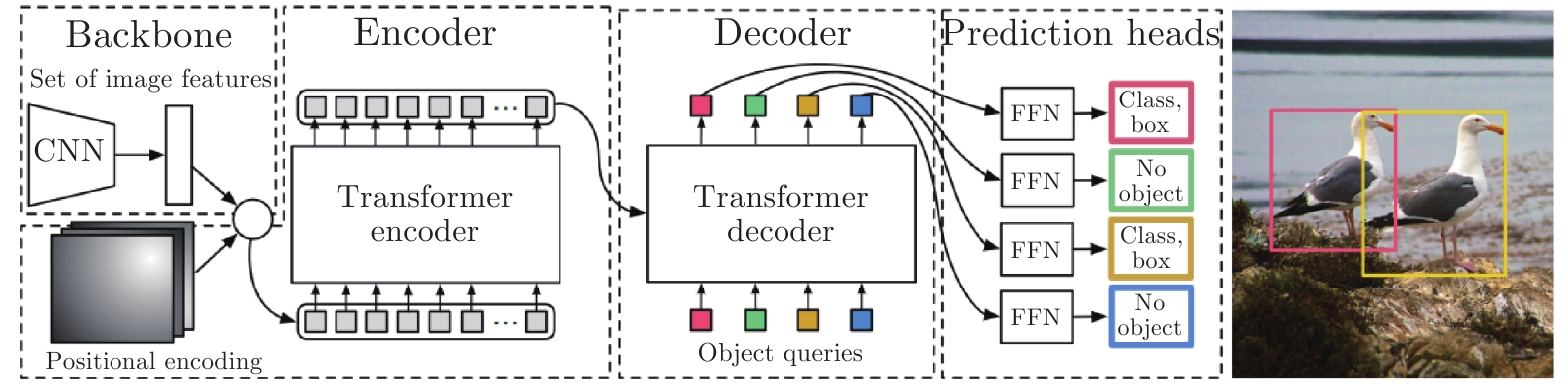
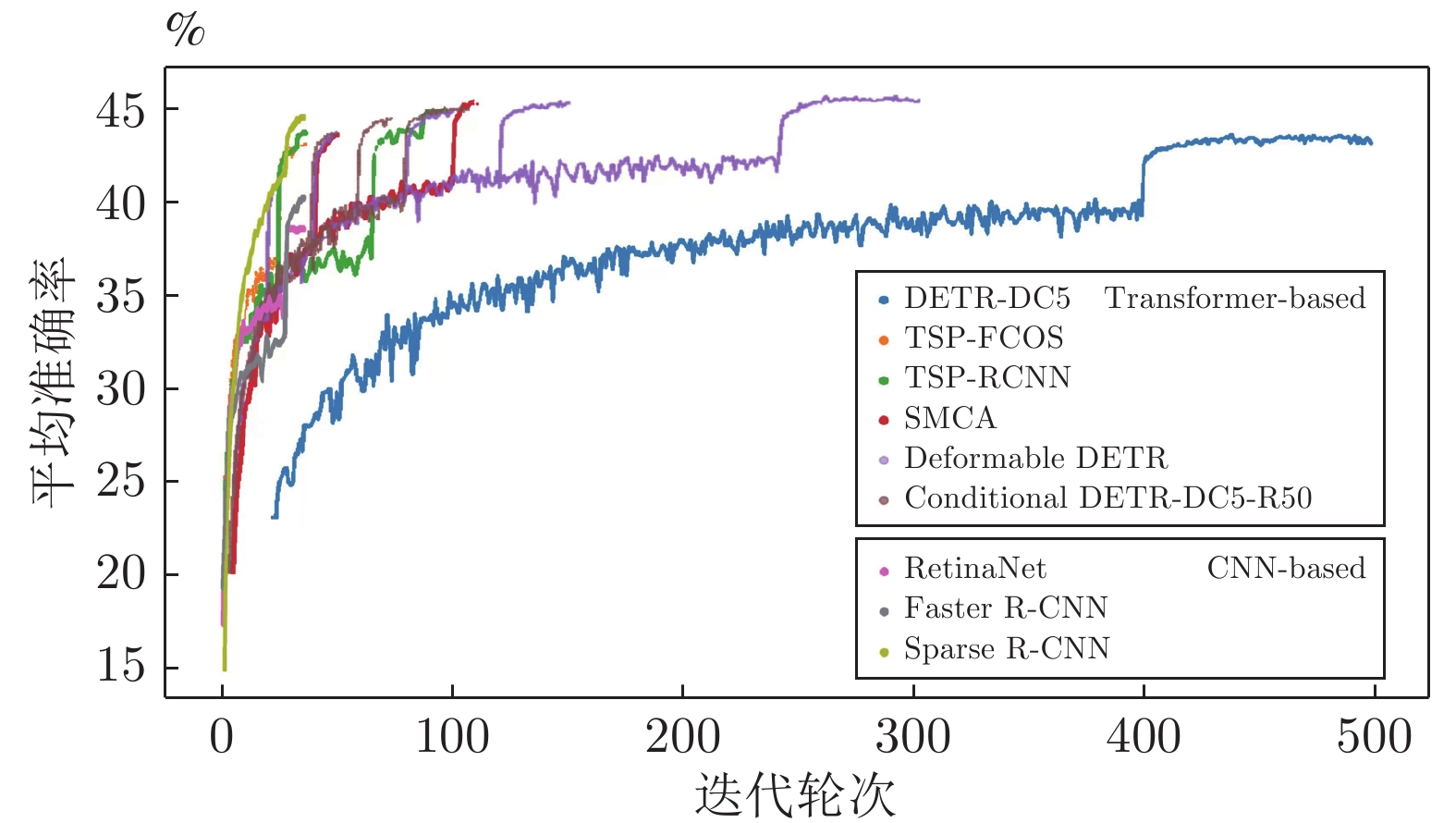
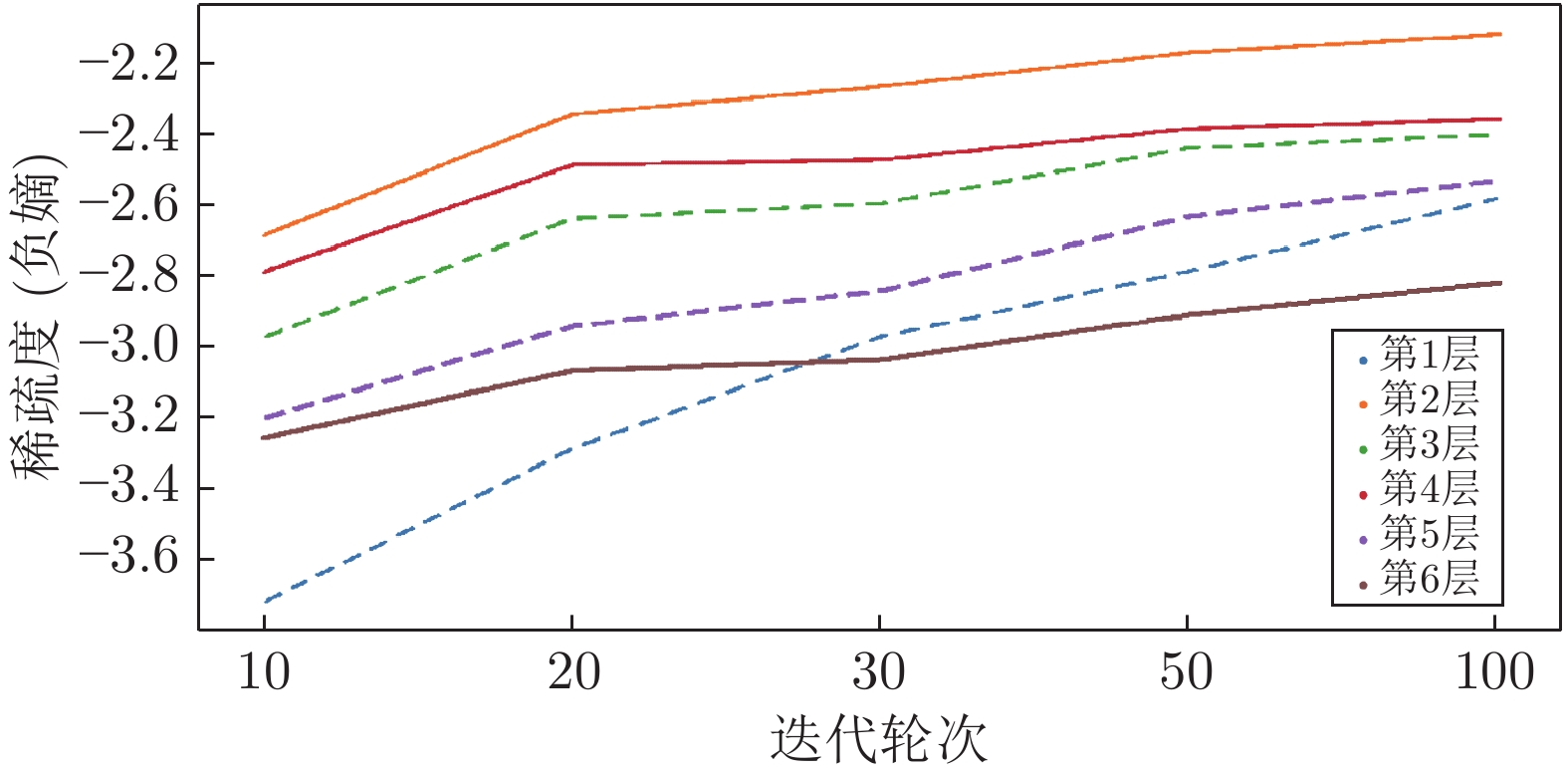
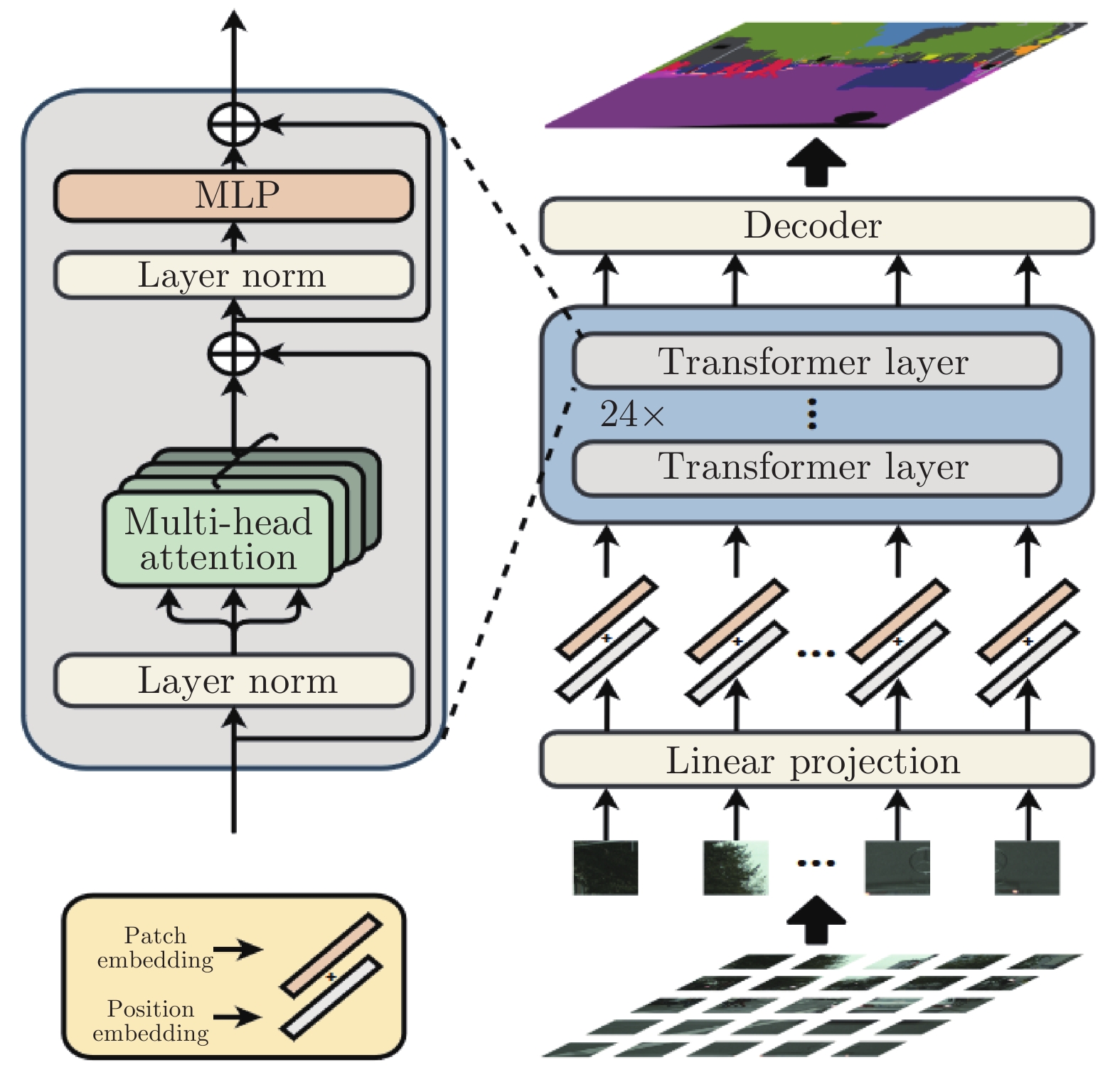
Transformer所具备的长距离建模能力和并行计算能力使其在自然语言处理领域取得了巨大成功并逐步拓展至计算机视觉等领域. 本文以分类任务为切入, 介绍了典型视觉Transformer的基本原理和结构, 并分析了Transformer与卷积神经网络在连接范围、权重动态性和位置表示能力三方面的区别与联系; 同时围绕计算代价、性能提升、训练优化以及结构设计四个方面总结了视觉Transformer研究中的关键问题以及研究进展; 并提出了视觉Transformer的一般性框架; 然后针对检测和分割两个领域, 介绍了视觉Transformer在特征学习、结果产生和真值分配等方面给上层视觉模型设计带来的启发和改变; 并对视觉Transformer未来发展方向进行了展望.
Transformer所具备的长距离建模能力和并行计算能力使其在自然语言处理领域取得了巨大成功并逐步拓展至计算机视觉等领域. 本文以分类任务为切入, 介绍了典型视觉Transformer的基本原理和结构, 并分析了Transformer与卷积神经网络在连接范围、权重动态性和位置表示能力三方面的区别与联系; 同时围绕计算代价、性能提升、训练优化以及结构设计四个方面总结了视觉Transformer研究中的关键问题以及研究进展; 并提出了视觉Transformer的一般性框架; 然后针对检测和分割两个领域, 介绍了视觉Transformer在特征学习、结果产生和真值分配等方面给上层视觉模型设计带来的启发和改变; 并对视觉Transformer未来发展方向进行了展望.

2022, 48(4): 980-991.
doi: 10.16383/j.aas.c200932
摘要:
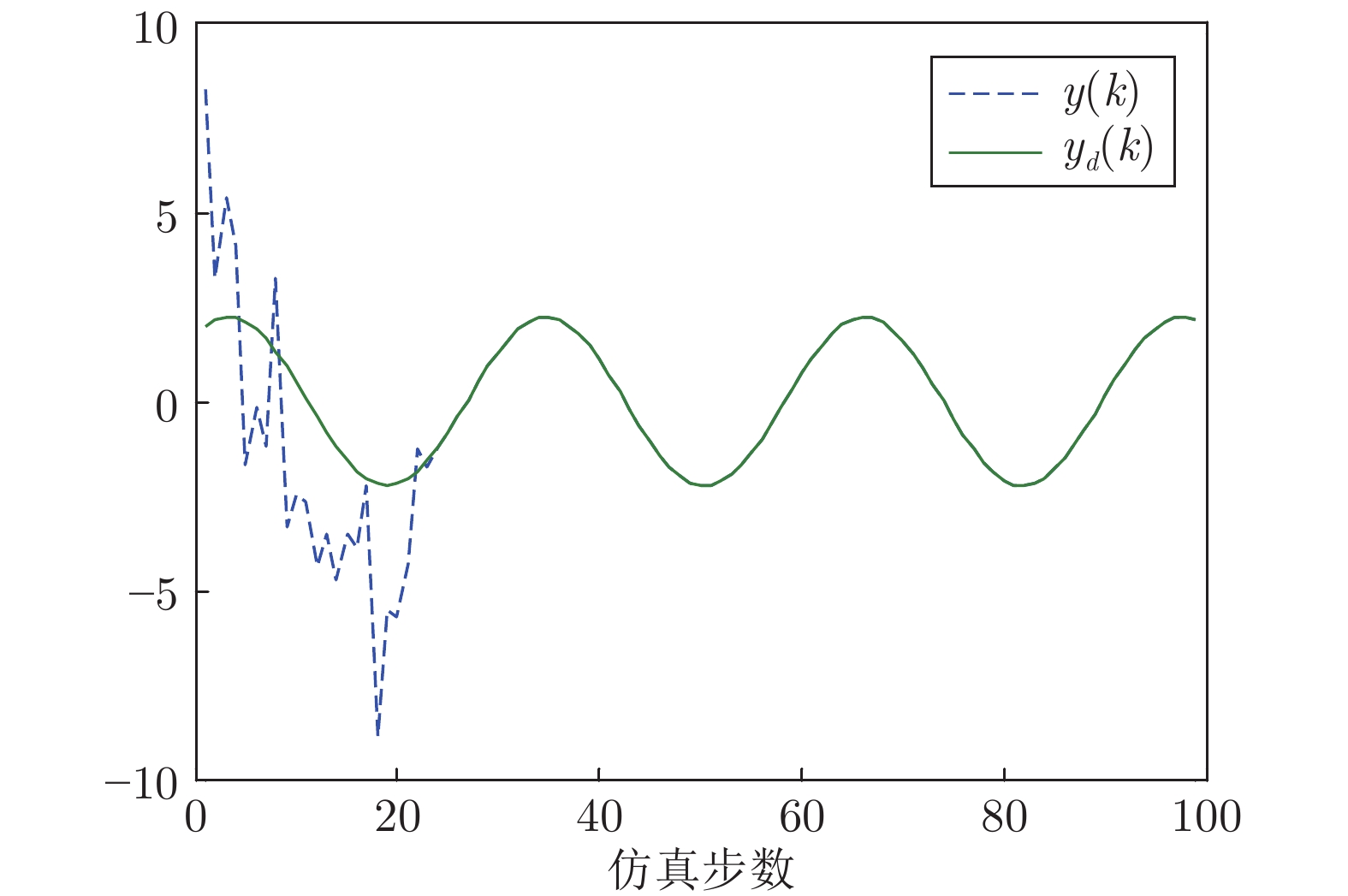
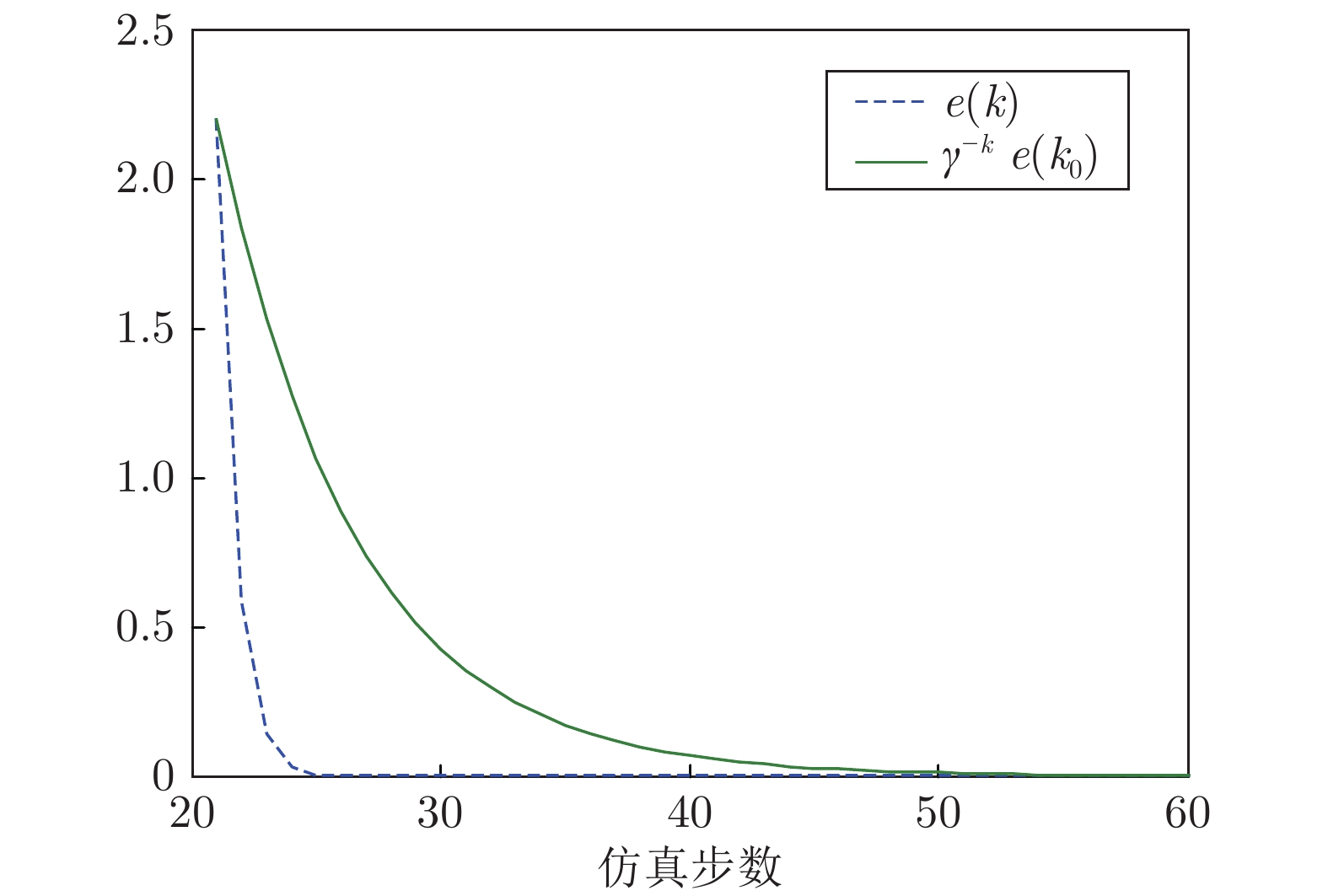
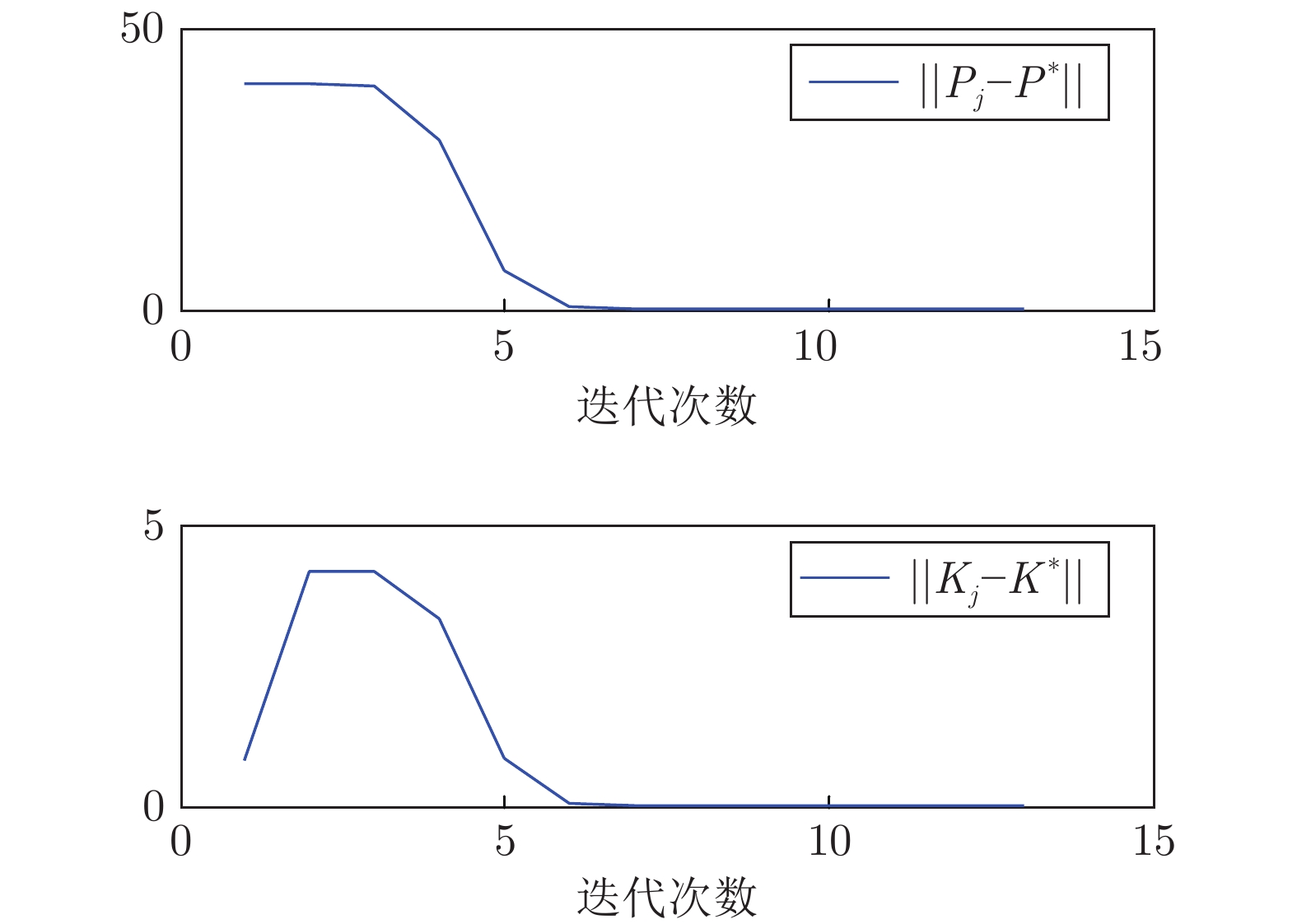
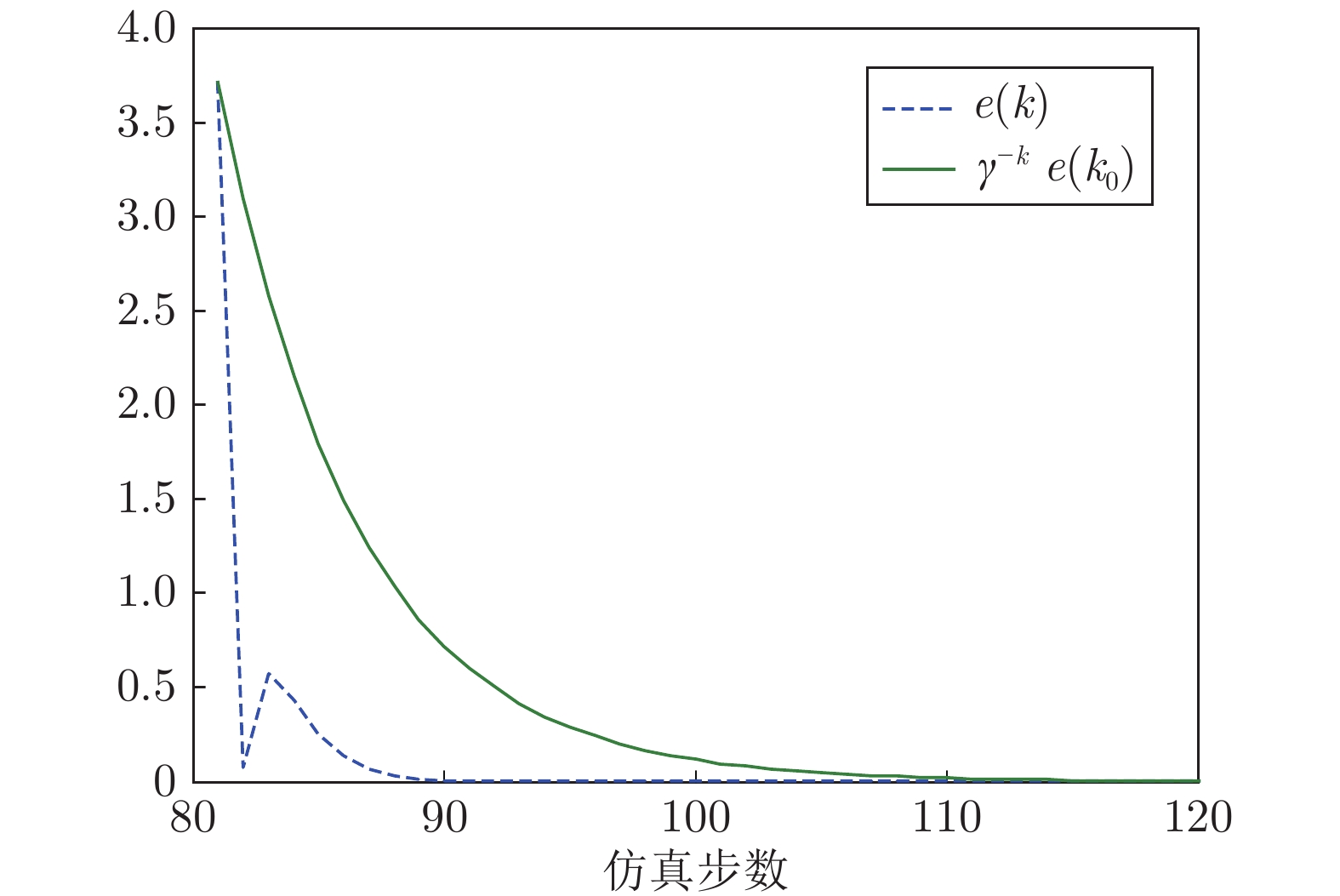
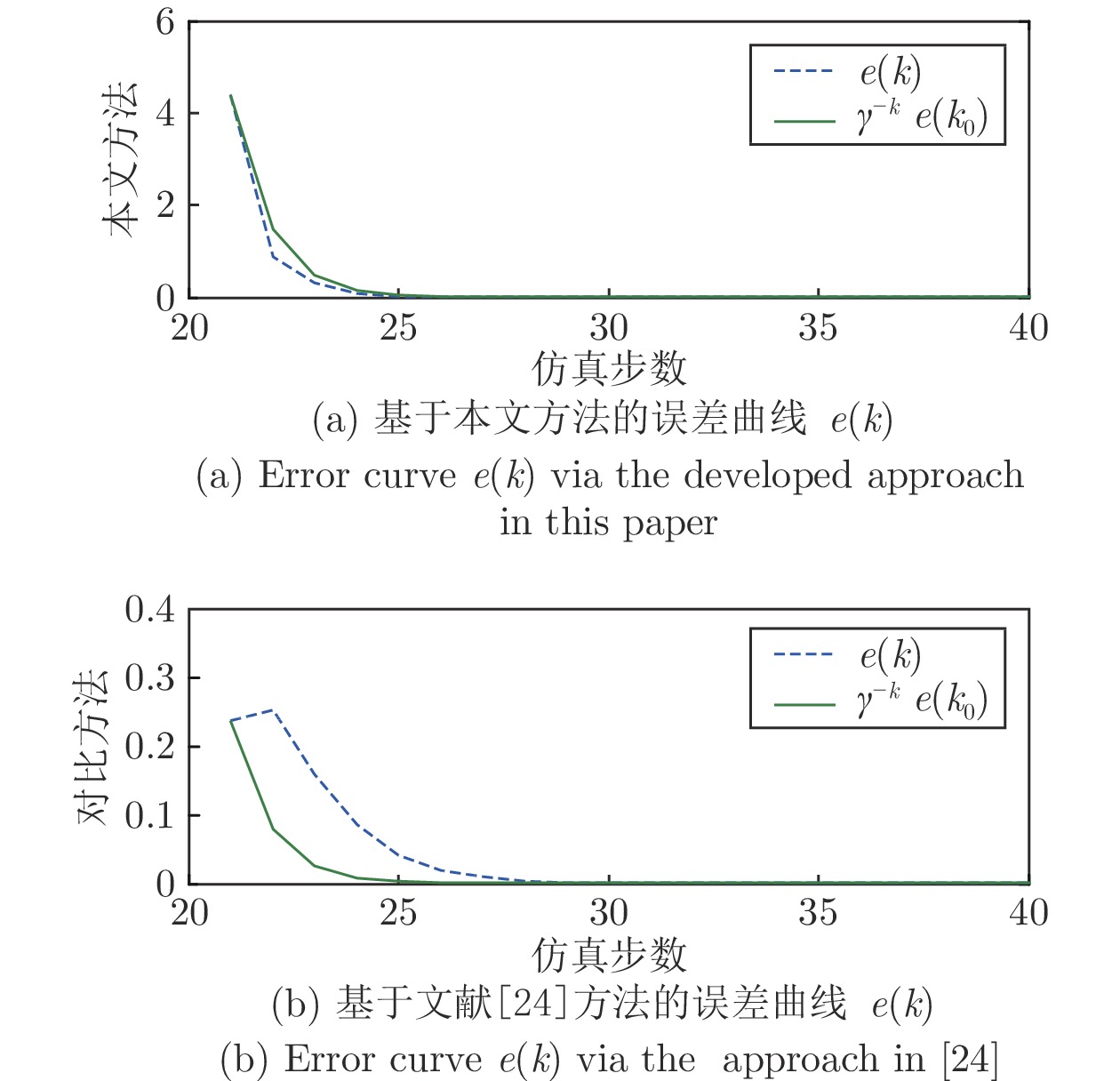
针对具有外部系统扰动的线性离散时间系统的输出调节问题, 提出了可保证收敛速率的数据驱动最优输出调节方法, 包括状态可在线测量系统的基于状态反馈的算法, 与状态不可在线测量系统的基于输出反馈的算法. 首先, 该问题被分解为输出调节方程求解问题与反馈控制律设计问题, 基于输出调节方程的解, 通过引入收敛速率参数, 建立了可保证收敛速率的最优控制问题, 通过求解该问题得到具有保证收敛速率的输出调节器. 之后, 利用强化学习的方法, 设计基于值迭代的数据驱动状态反馈控制器, 学习得到基于状态反馈的最优输出调节器. 对于状态无法在线测量的被控对象, 利用历史输入输出数据对状态进行重构, 并以此为基础设计基于值迭代的数据驱动输出反馈控制器. 仿真结果验证了所提方法的有效性.
针对具有外部系统扰动的线性离散时间系统的输出调节问题, 提出了可保证收敛速率的数据驱动最优输出调节方法, 包括状态可在线测量系统的基于状态反馈的算法, 与状态不可在线测量系统的基于输出反馈的算法. 首先, 该问题被分解为输出调节方程求解问题与反馈控制律设计问题, 基于输出调节方程的解, 通过引入收敛速率参数, 建立了可保证收敛速率的最优控制问题, 通过求解该问题得到具有保证收敛速率的输出调节器. 之后, 利用强化学习的方法, 设计基于值迭代的数据驱动状态反馈控制器, 学习得到基于状态反馈的最优输出调节器. 对于状态无法在线测量的被控对象, 利用历史输入输出数据对状态进行重构, 并以此为基础设计基于值迭代的数据驱动输出反馈控制器. 仿真结果验证了所提方法的有效性.


2022, 48(4): 992-1003.
doi: 10.16383/j.aas.c200542
摘要:
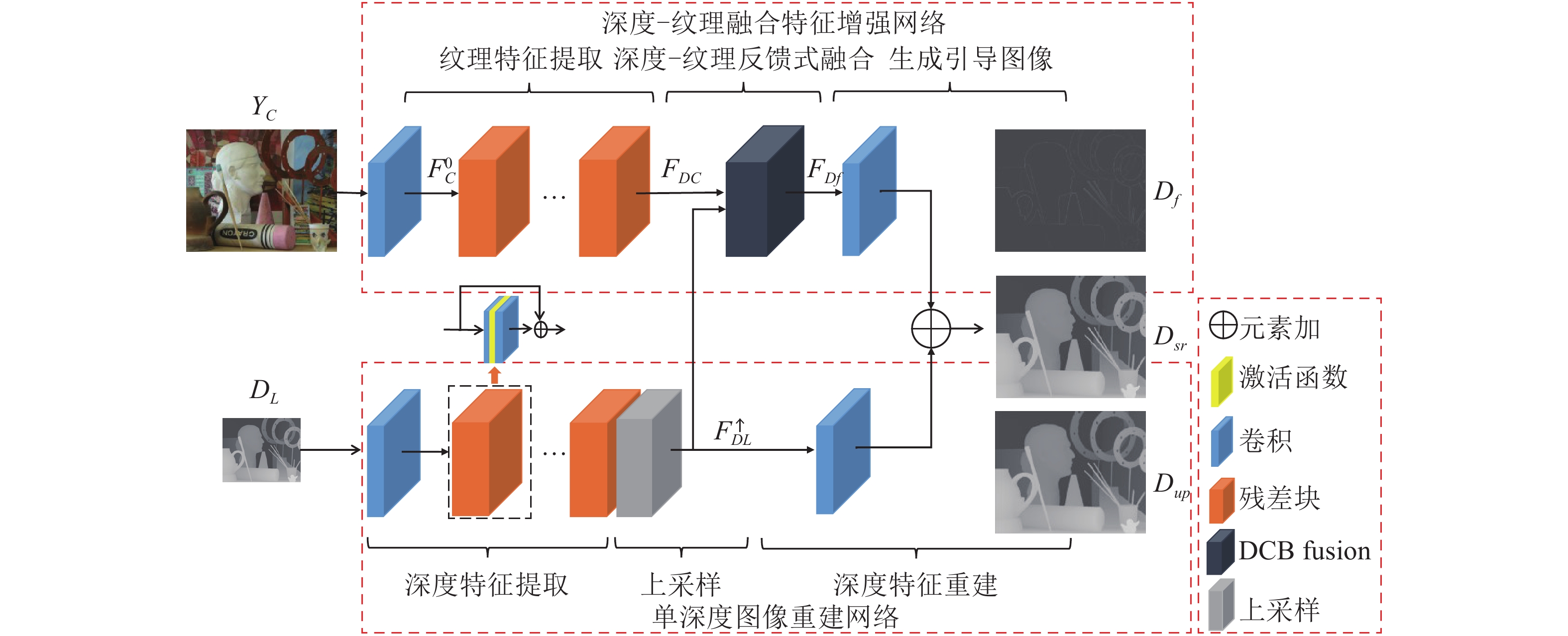
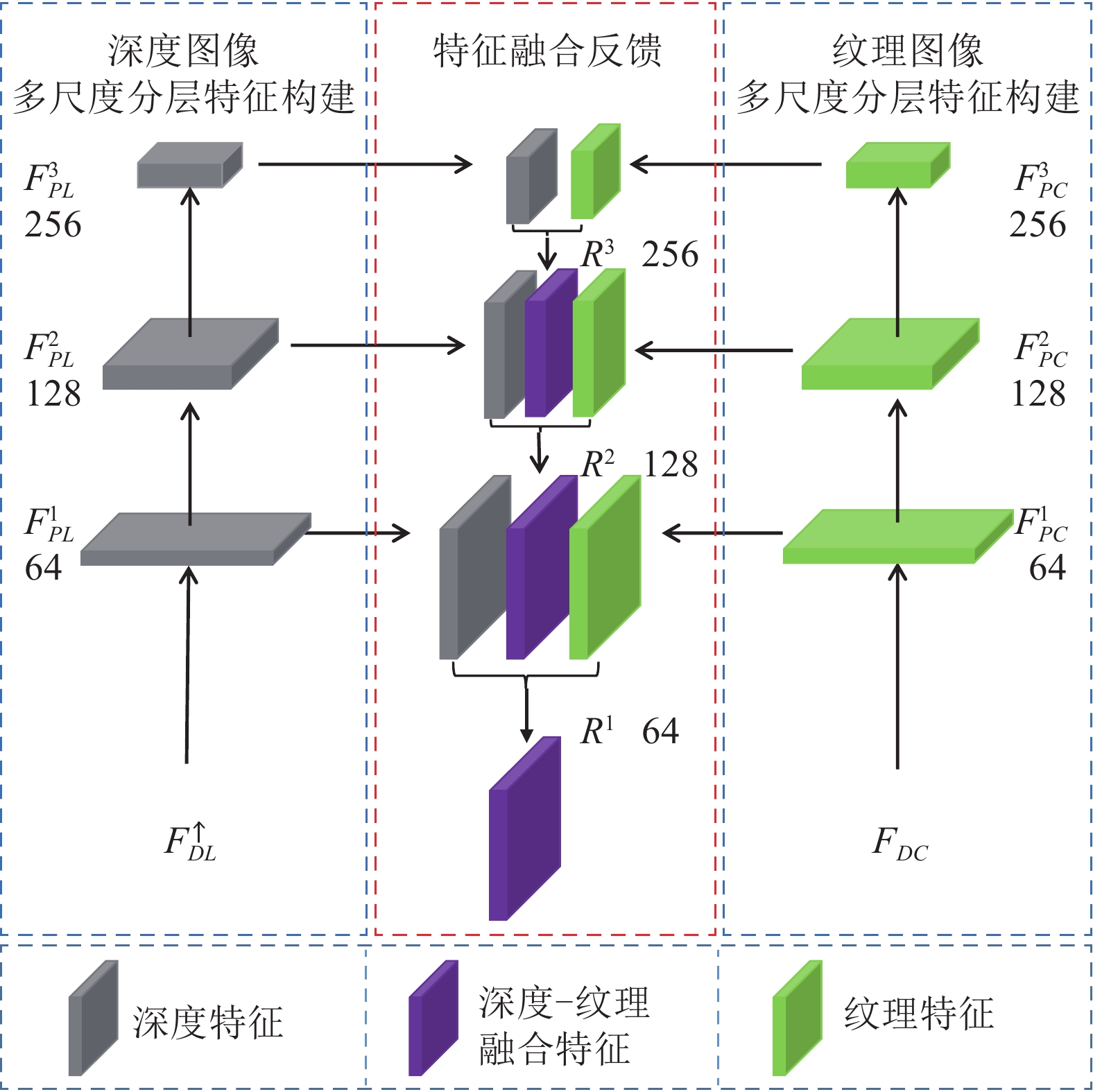
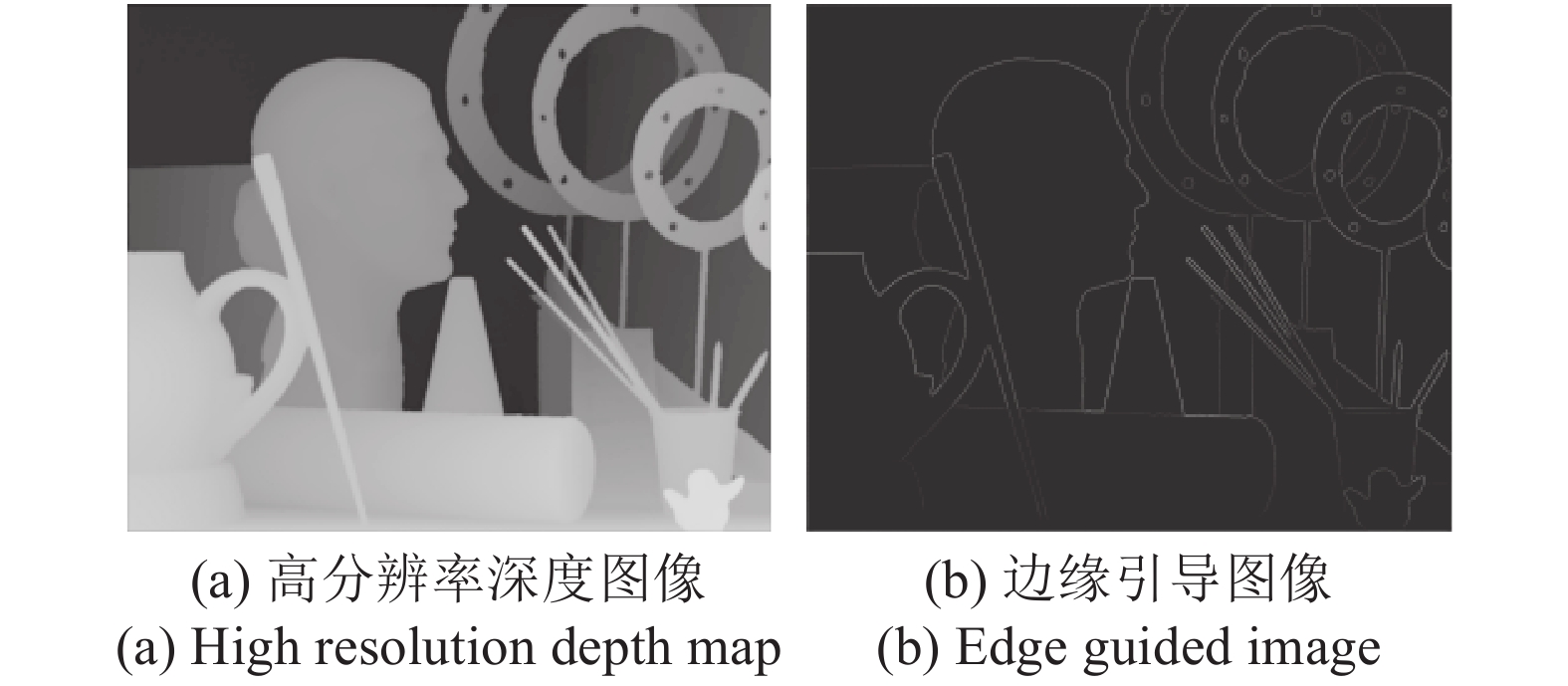
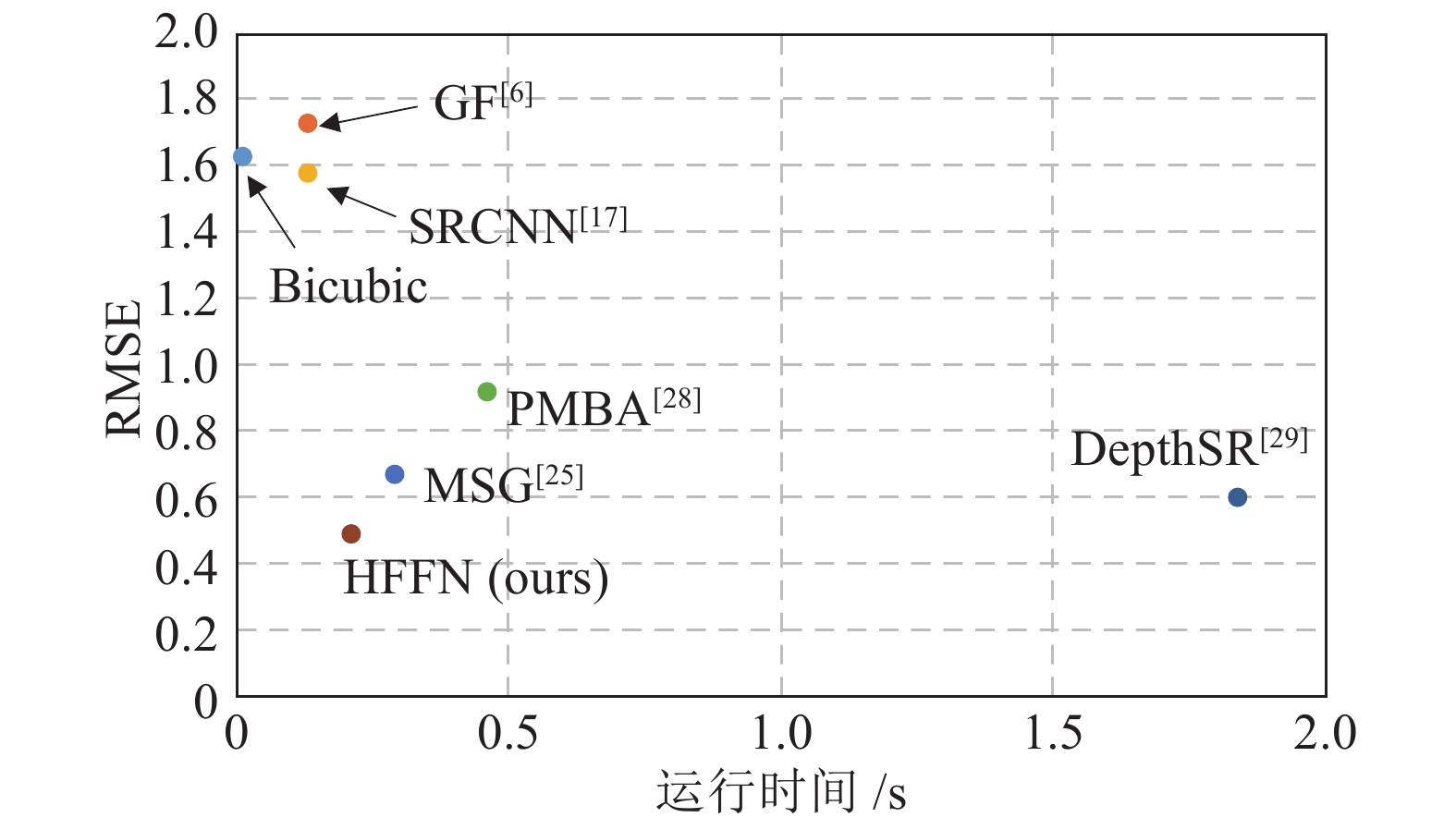
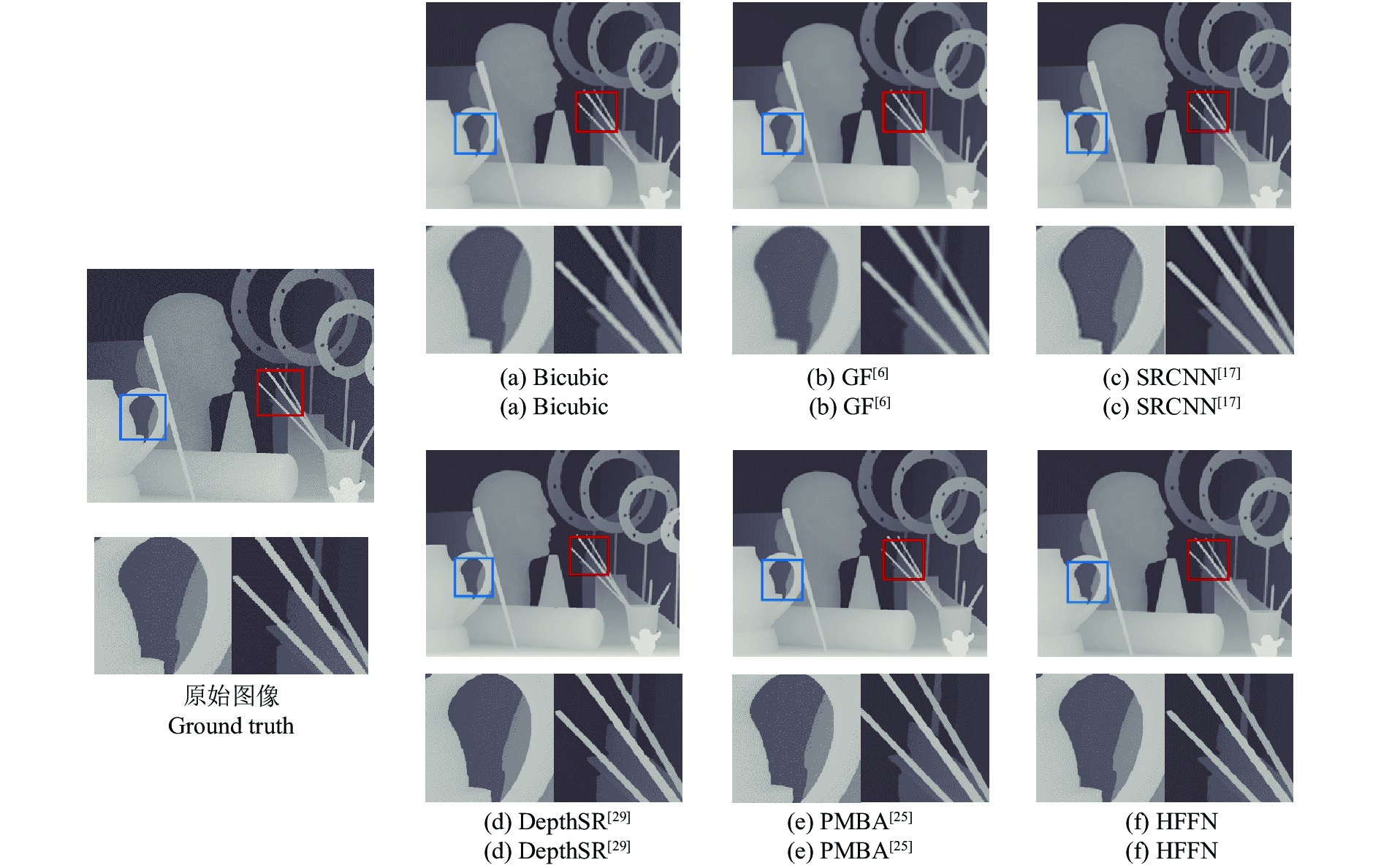
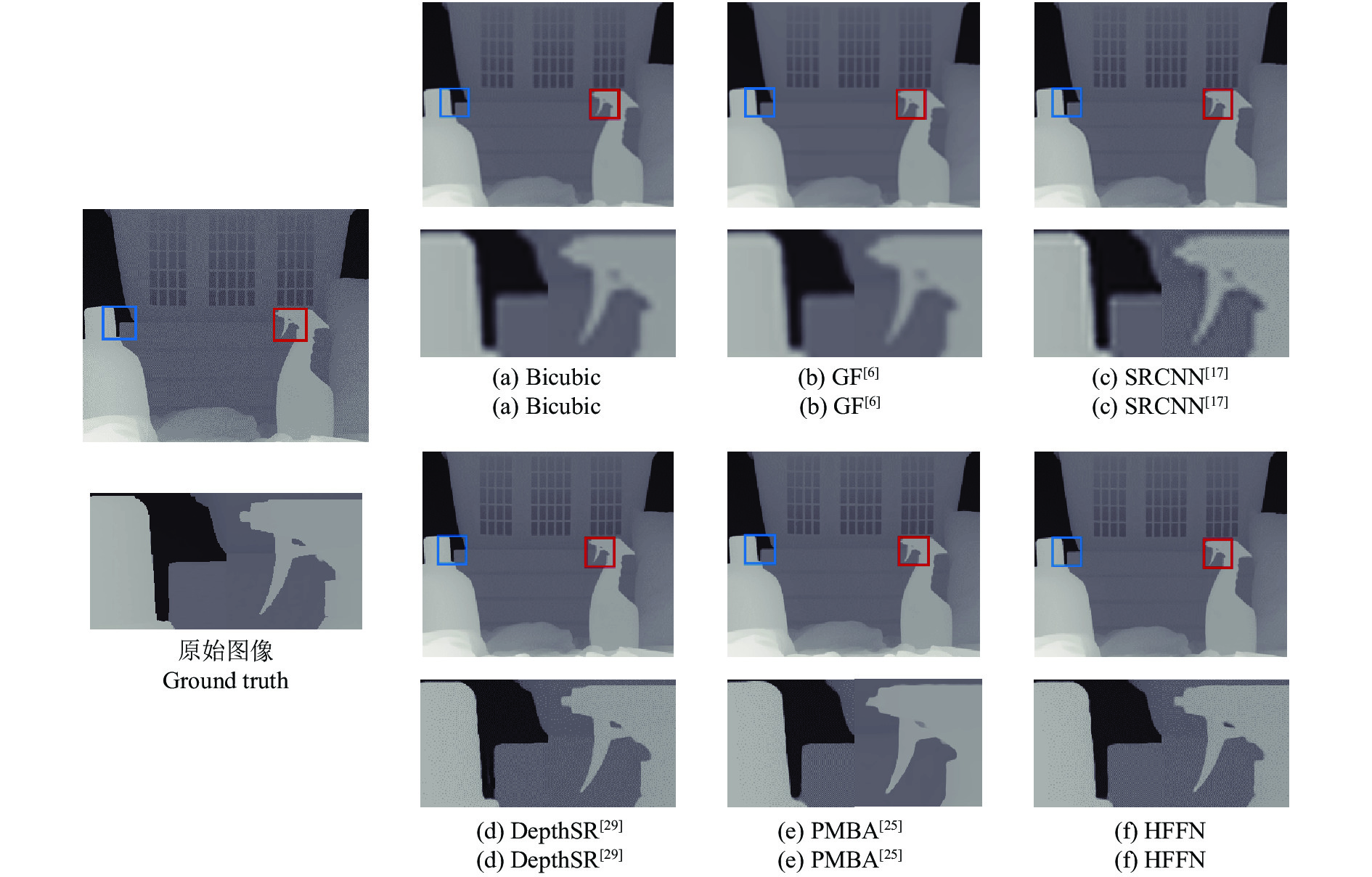
受采集装置的限制, 采集的深度图像存在分辨率较低、易受噪声干扰等问题. 本文构建了分级特征反馈融合网络 (Hierarchical feature feedback network, HFFN), 以实现深度图像的超分辨率重建. 该网络利用金字塔结构挖掘深度−纹理特征在不同尺度下的分层特征, 构建深度−纹理的分层特征表示. 为了有效利用不同尺度下的结构信息, 本文设计了一种分级特征的反馈式融合策略, 综合深度−纹理的边缘特征, 生成重建深度图像的边缘引导信息, 完成深度图像的重建过程. 与对比方法相比, 实验结果表明HFNN网络提升了深度图像的主、客观重建质量.
受采集装置的限制, 采集的深度图像存在分辨率较低、易受噪声干扰等问题. 本文构建了分级特征反馈融合网络 (Hierarchical feature feedback network, HFFN), 以实现深度图像的超分辨率重建. 该网络利用金字塔结构挖掘深度−纹理特征在不同尺度下的分层特征, 构建深度−纹理的分层特征表示. 为了有效利用不同尺度下的结构信息, 本文设计了一种分级特征的反馈式融合策略, 综合深度−纹理的边缘特征, 生成重建深度图像的边缘引导信息, 完成深度图像的重建过程. 与对比方法相比, 实验结果表明HFNN网络提升了深度图像的主、客观重建质量.

2022, 48(4): 1004-1017.
doi: 10.16383/j.aas.c210127
摘要:
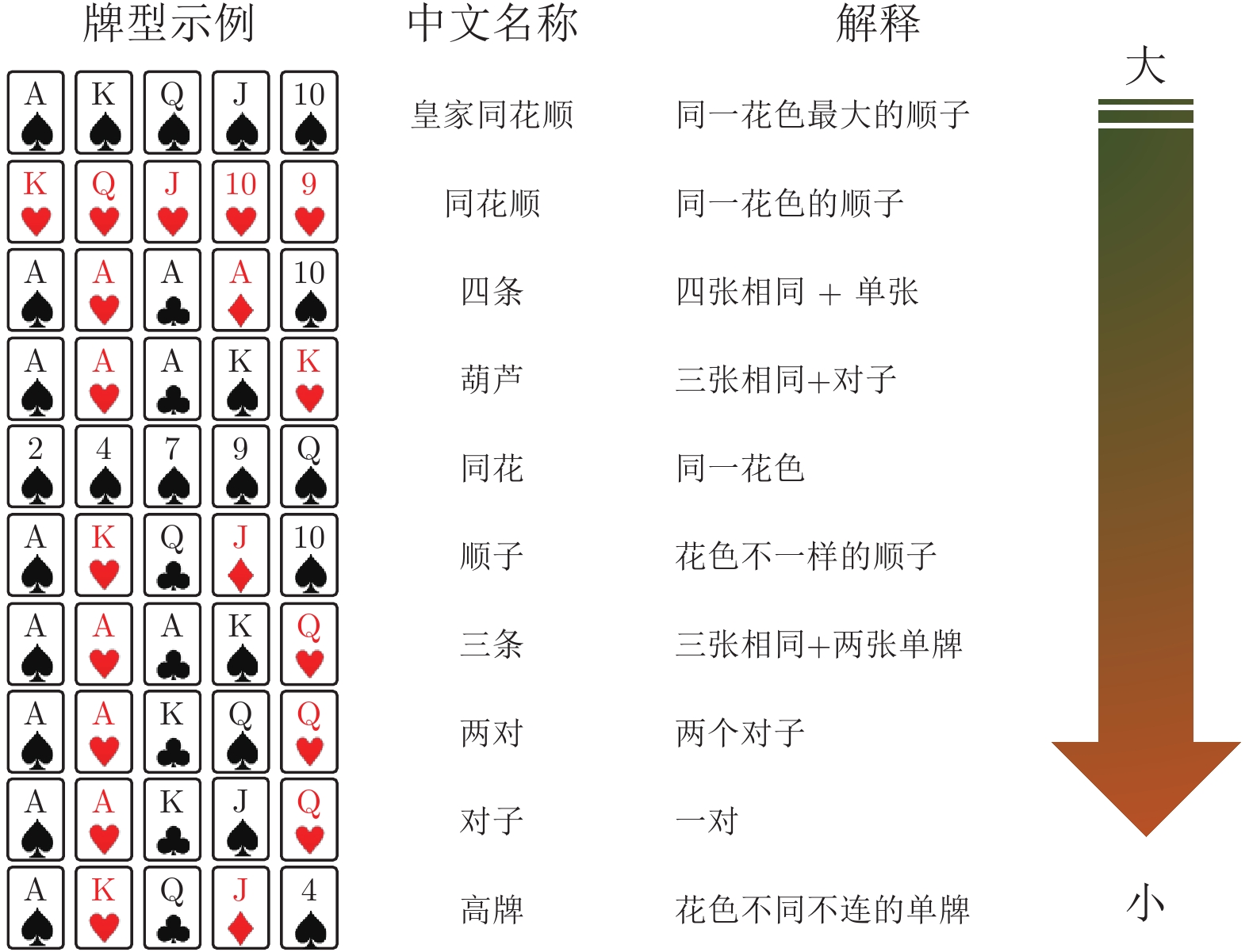
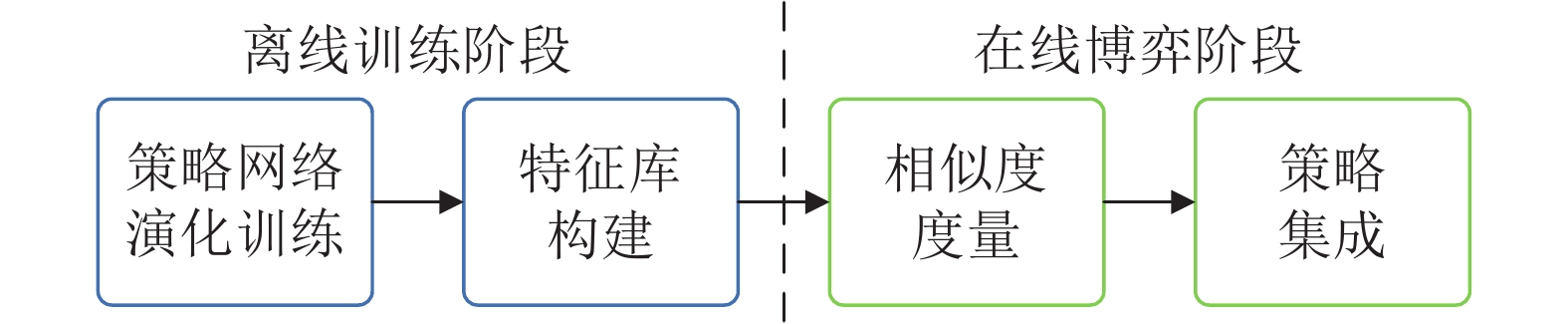
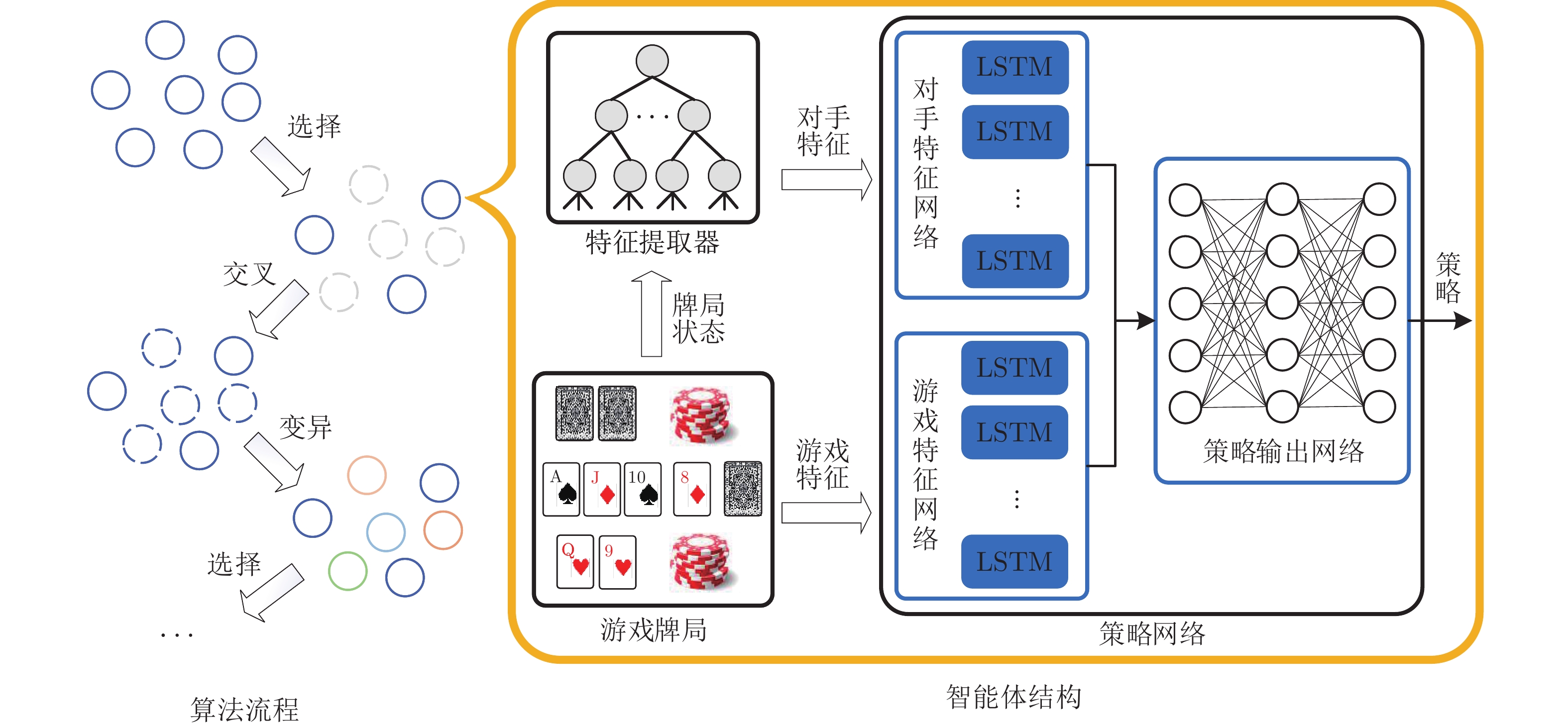
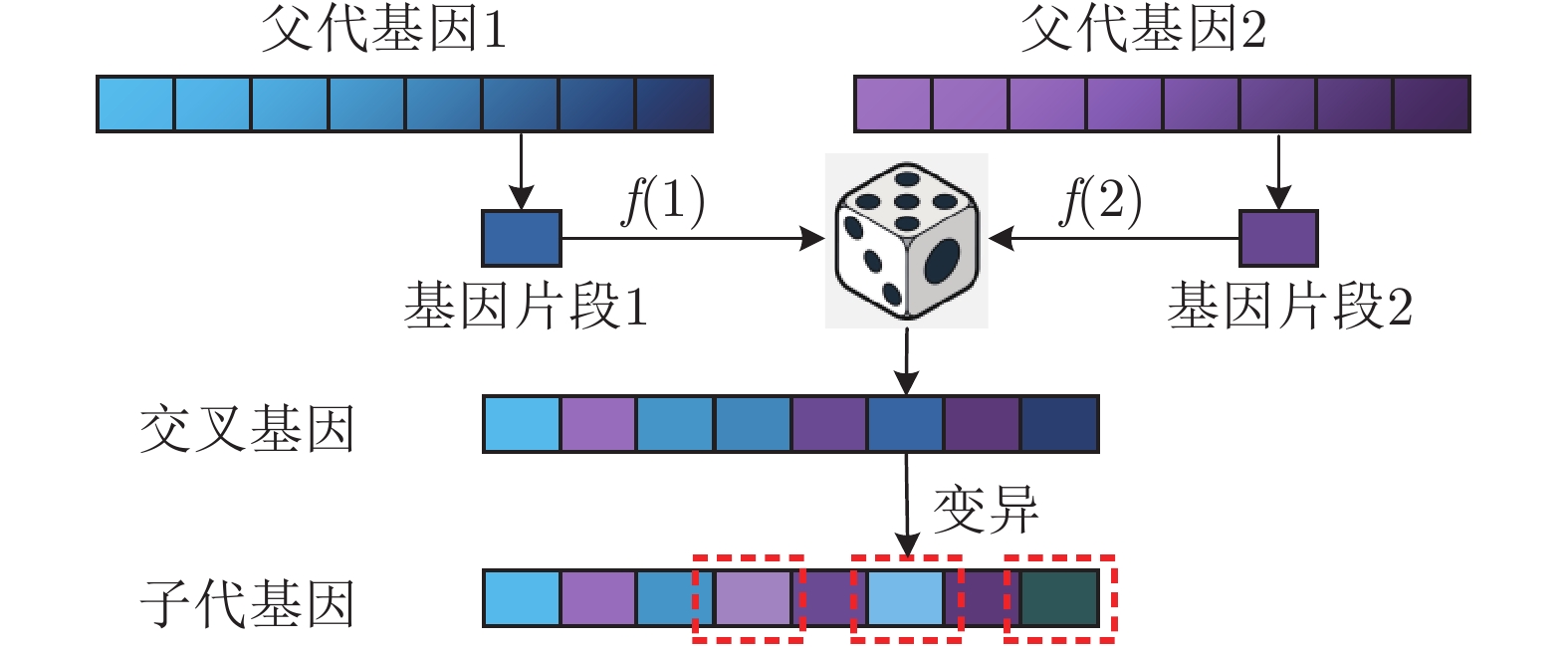
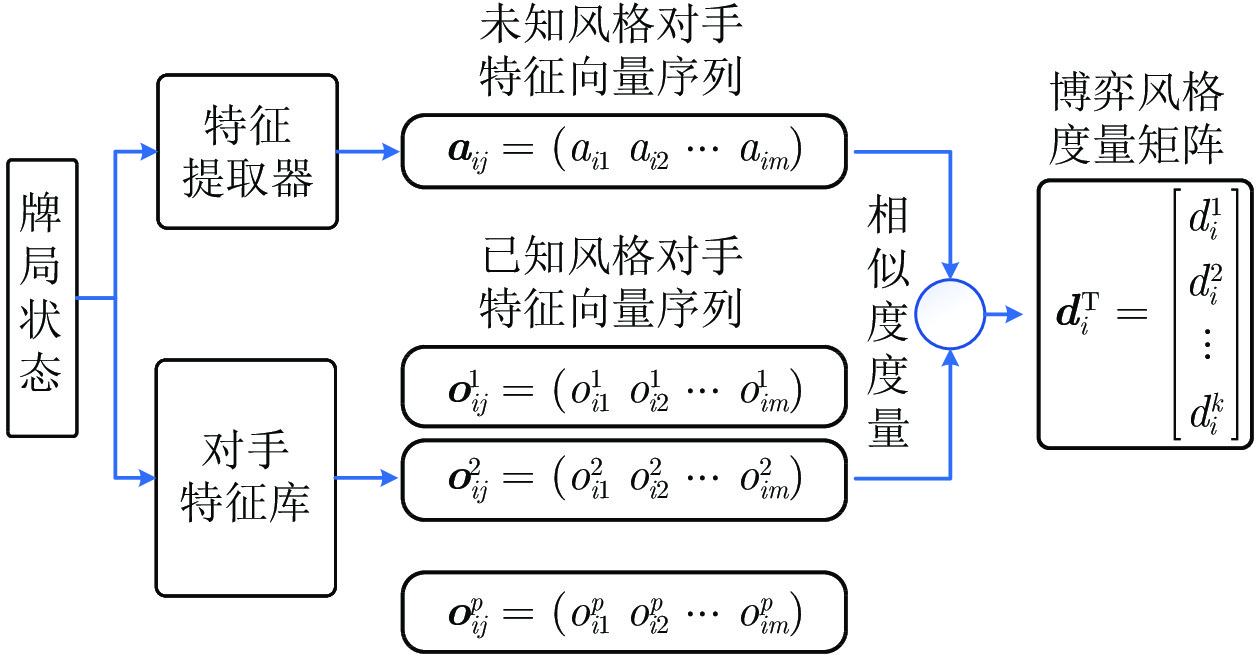
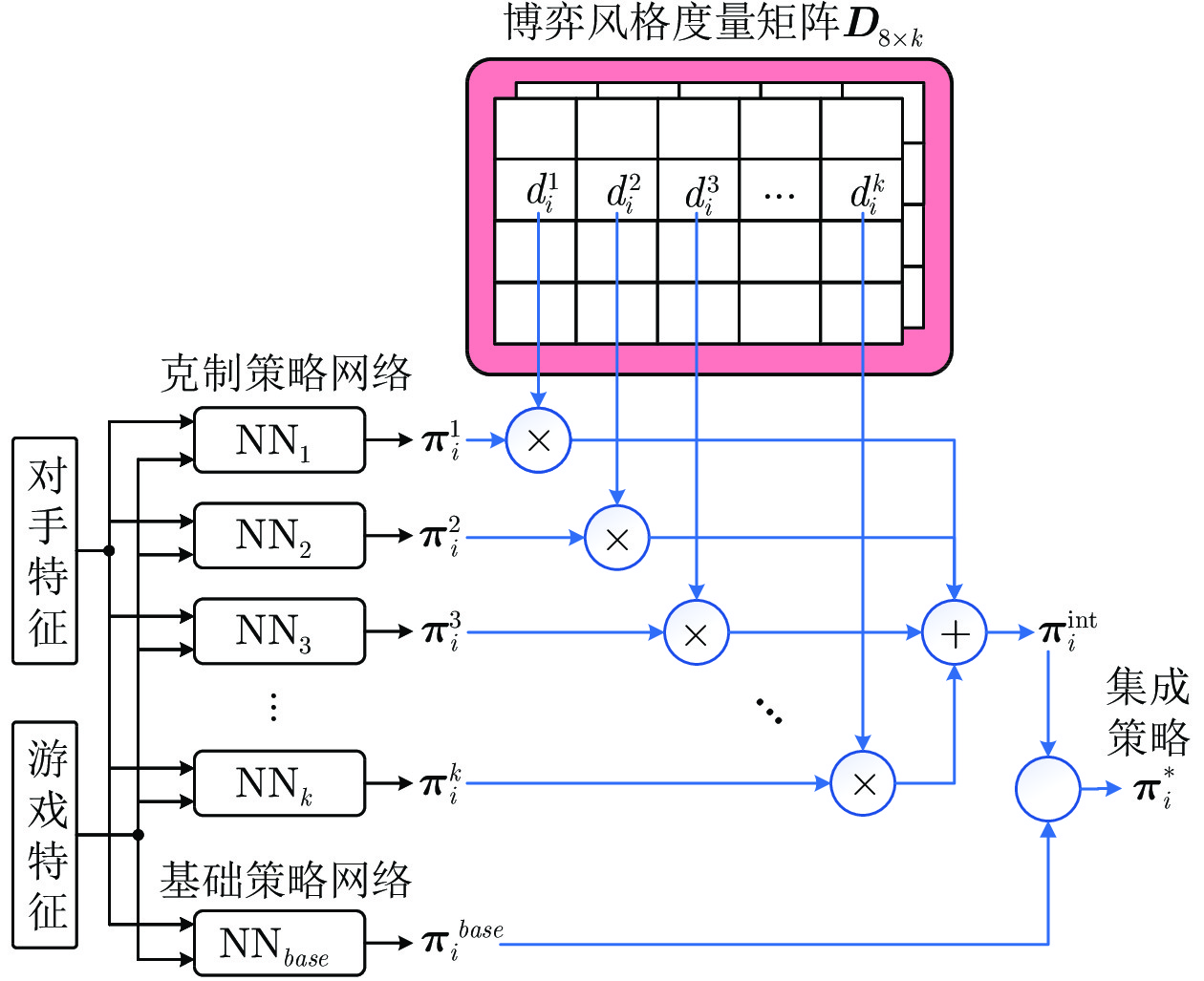
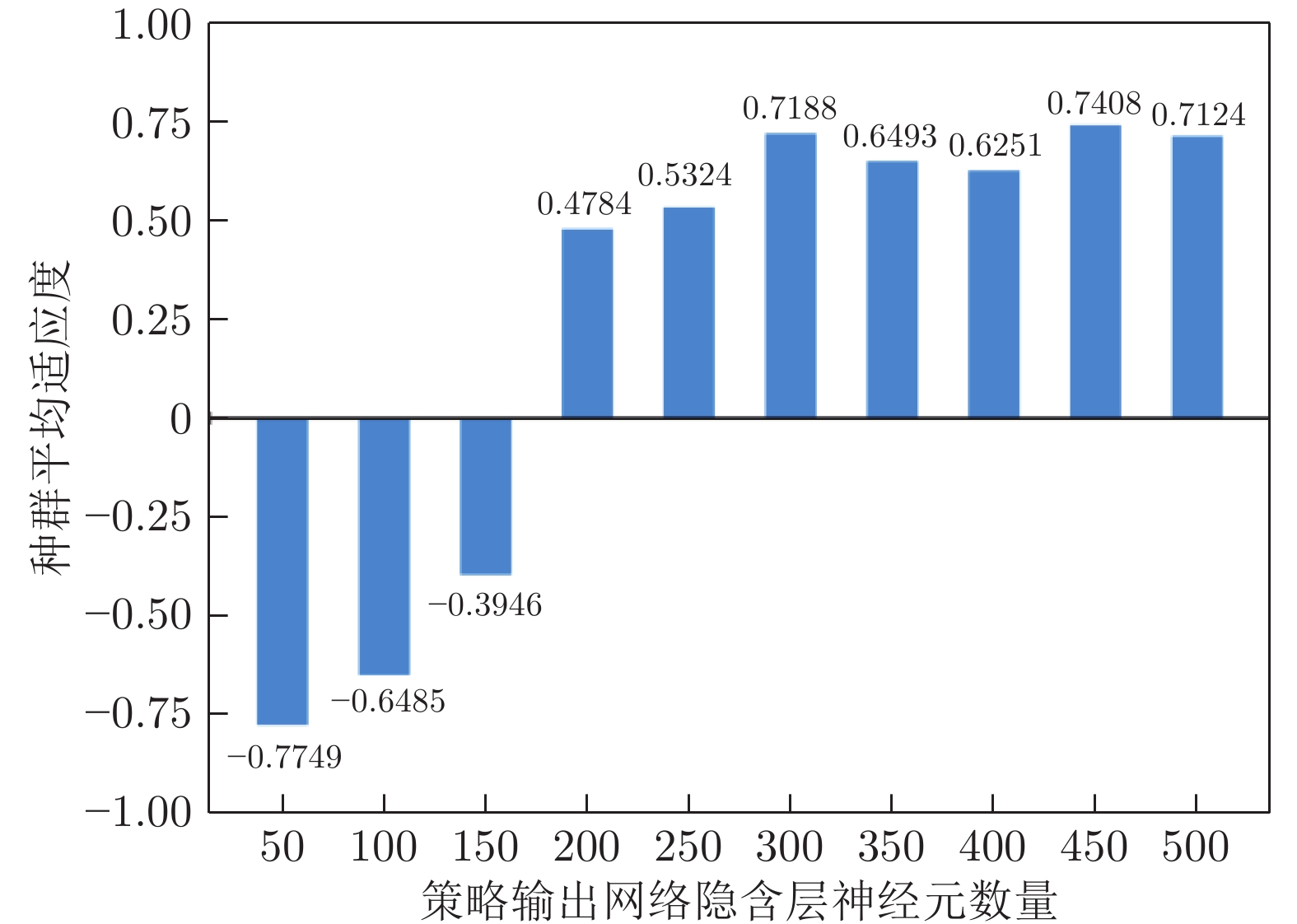
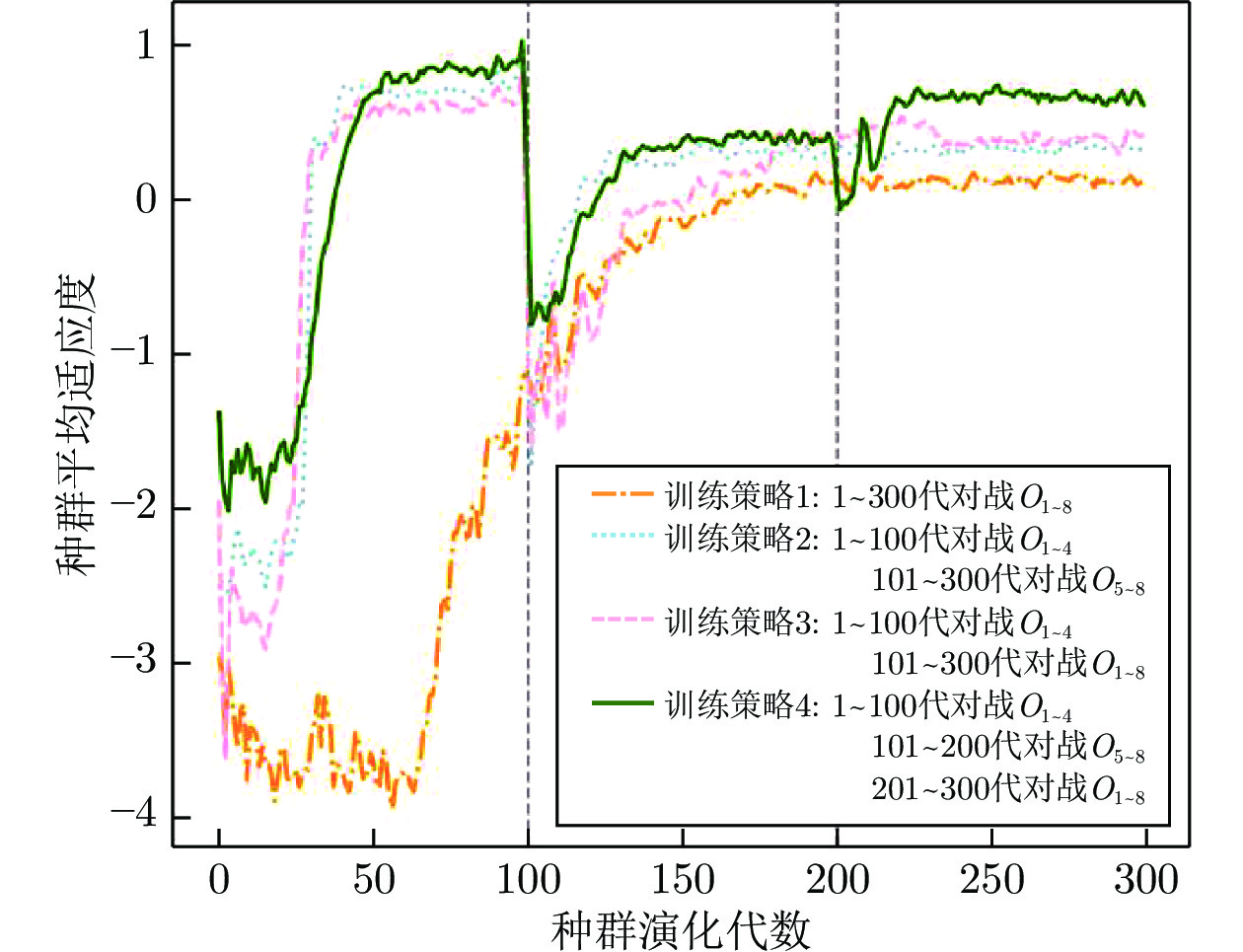
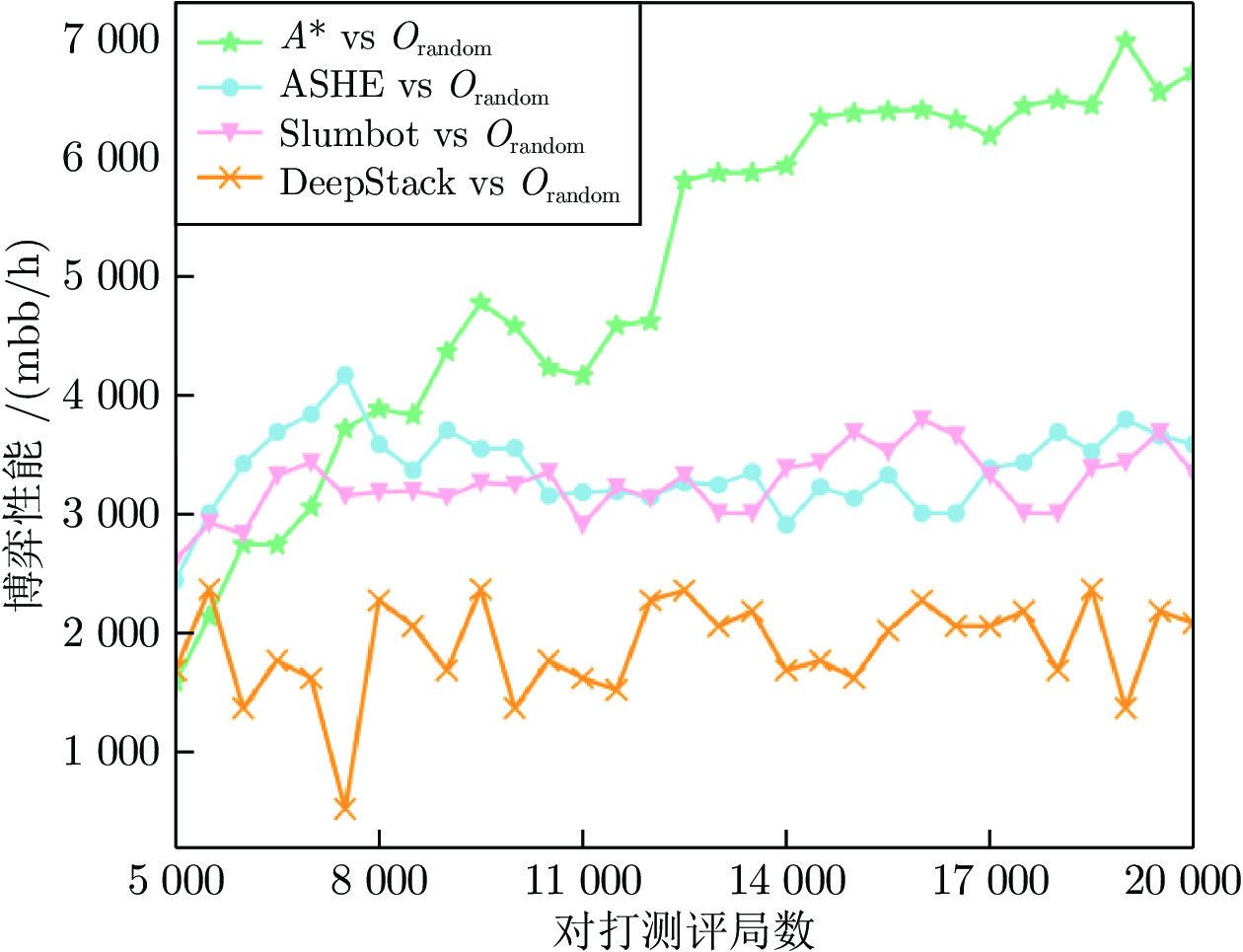
以德州扑克游戏为代表的大规模不完美信息博弈是现实世界中常见的一种博弈类型. 现有以求解纳什均衡策略为目标的主流德州扑克求解算法存在依赖博弈树模型、算力消耗大、策略过于保守等问题, 导致智能体在面对不同对手时无法最大化自身收益. 为解决上述问题, 提出一种轻量高效且能快速适应对手策略变化进而剥削对手的不完美信息博弈求解框架. 本框架分为智能体离线训练和在线博弈两个阶段. 第1阶段基于演化学习思想训练智能体, 得到能够剥削不同博弈风格对手的策略神经网络. 在第2博弈阶段中, 智能体在线建模并适应未知风格对手, 利用种群策略集成的方法最大化剥削对手. 在两人无限注德州扑克环境中的实验结果表明, 本框架在面对动态对手策略时, 相比已有方法能够大幅提升博弈性能.
以德州扑克游戏为代表的大规模不完美信息博弈是现实世界中常见的一种博弈类型. 现有以求解纳什均衡策略为目标的主流德州扑克求解算法存在依赖博弈树模型、算力消耗大、策略过于保守等问题, 导致智能体在面对不同对手时无法最大化自身收益. 为解决上述问题, 提出一种轻量高效且能快速适应对手策略变化进而剥削对手的不完美信息博弈求解框架. 本框架分为智能体离线训练和在线博弈两个阶段. 第1阶段基于演化学习思想训练智能体, 得到能够剥削不同博弈风格对手的策略神经网络. 在第2博弈阶段中, 智能体在线建模并适应未知风格对手, 利用种群策略集成的方法最大化剥削对手. 在两人无限注德州扑克环境中的实验结果表明, 本框架在面对动态对手策略时, 相比已有方法能够大幅提升博弈性能.


2022, 48(4): 1018-1032.
doi: 10.16383/j.aas.c210807
摘要:
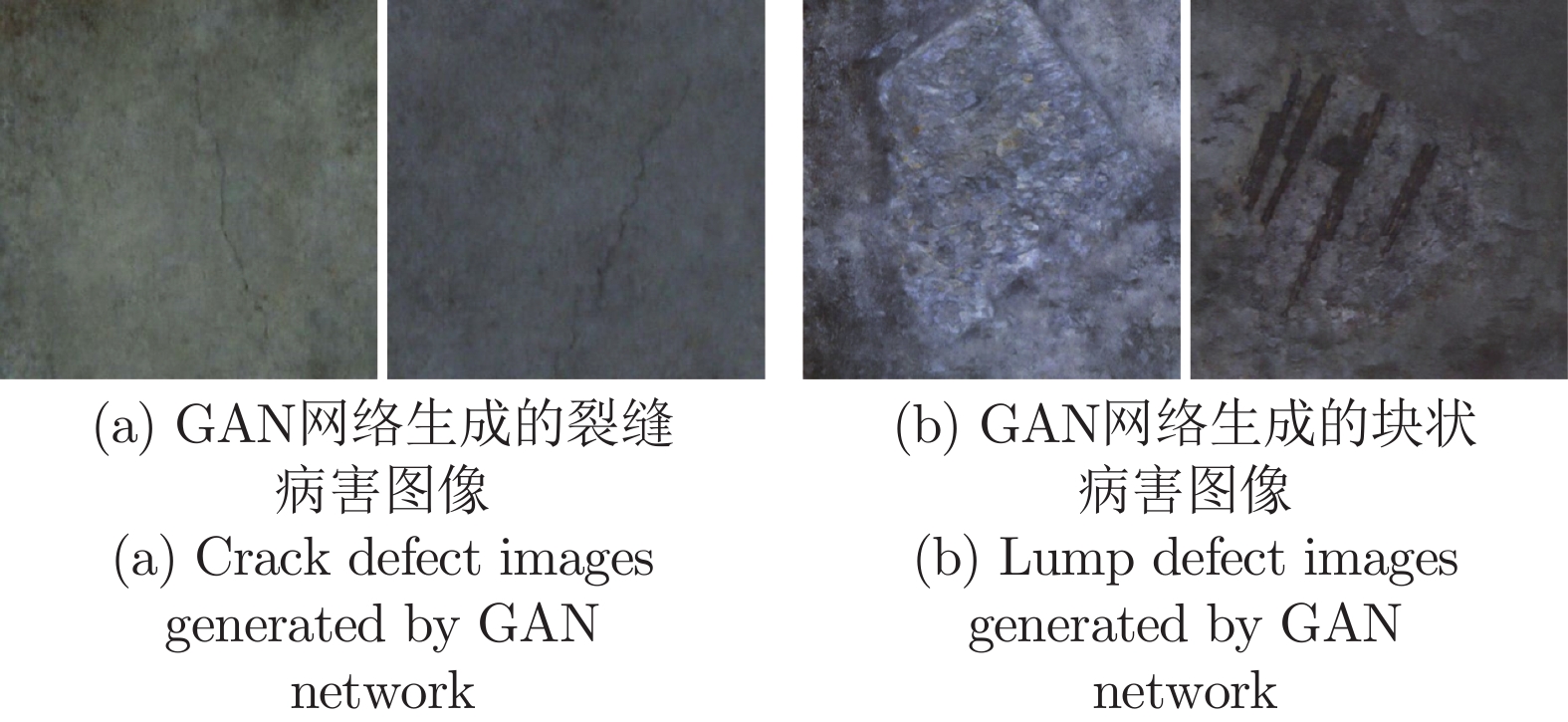
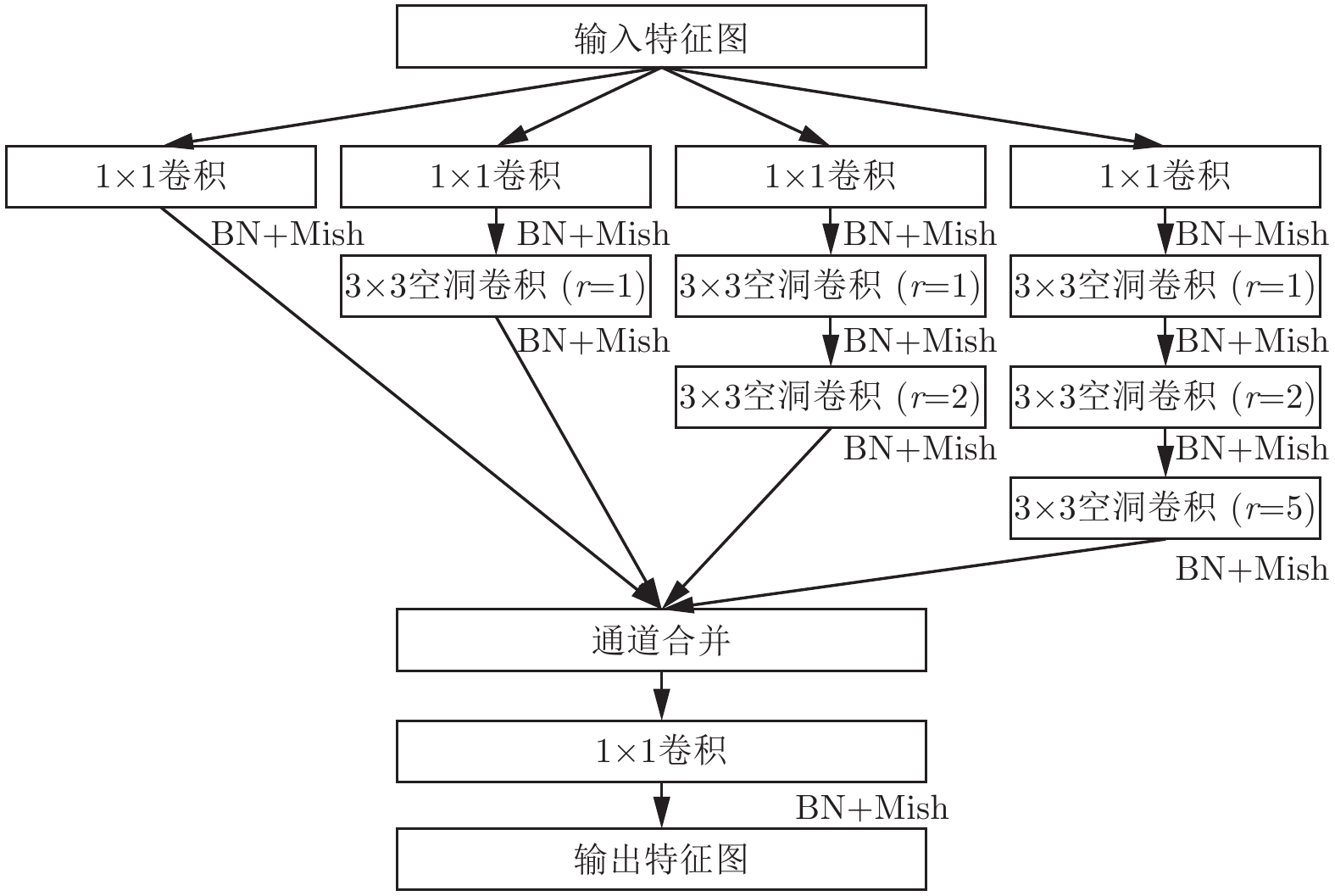
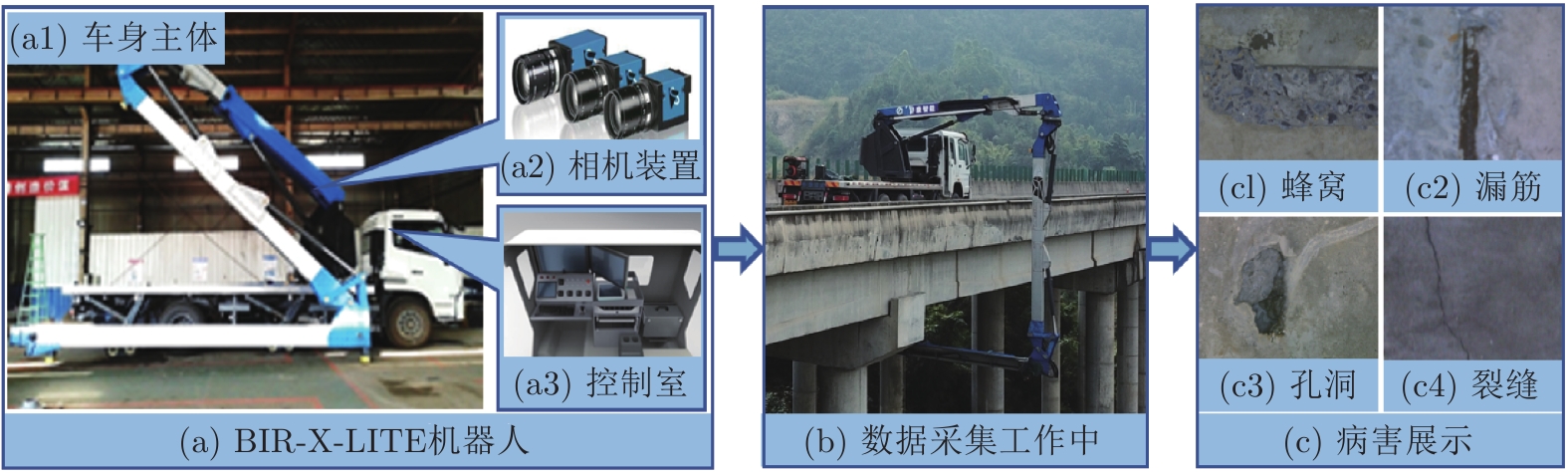
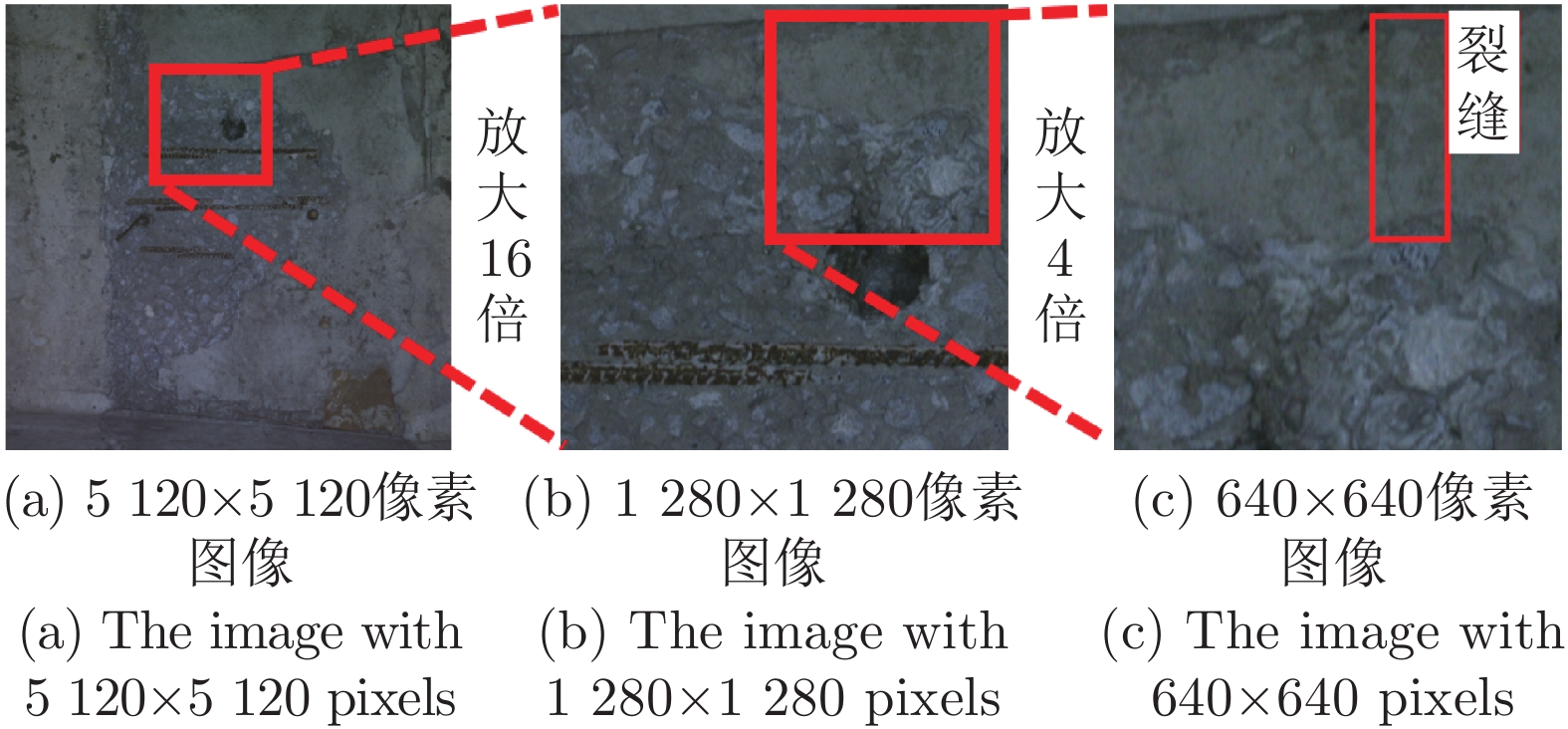
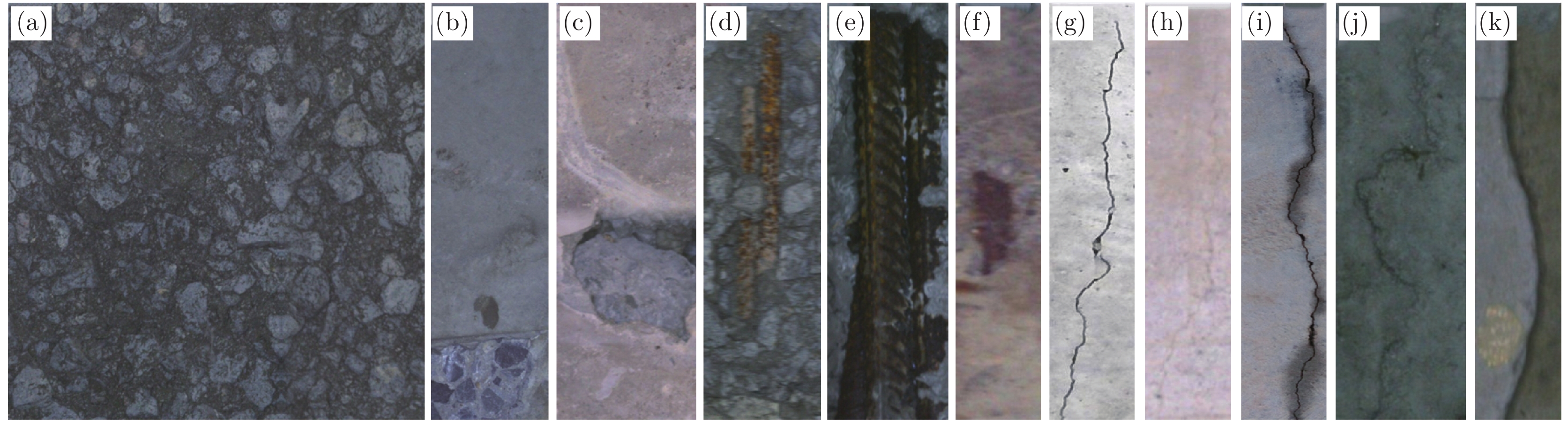
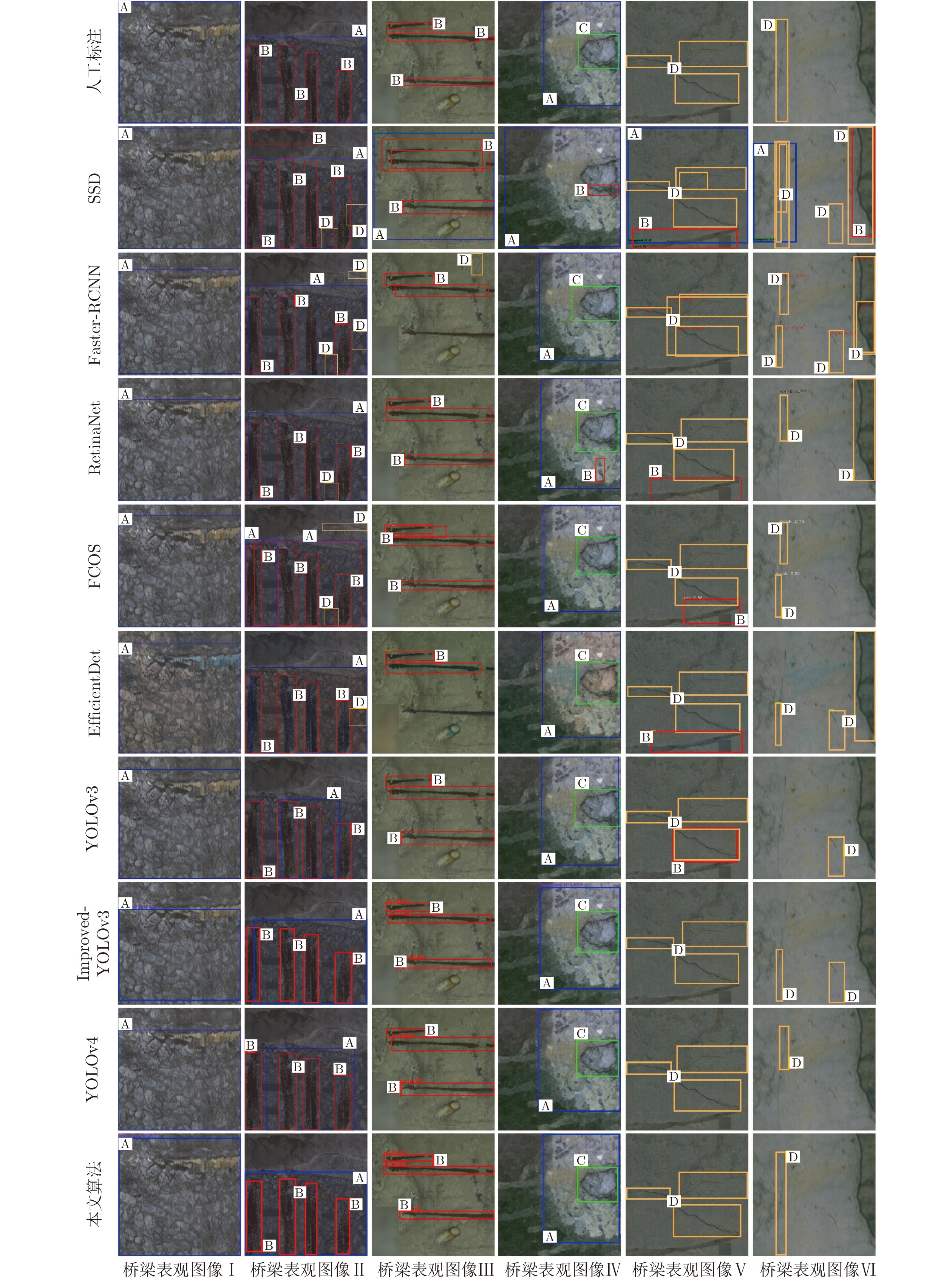
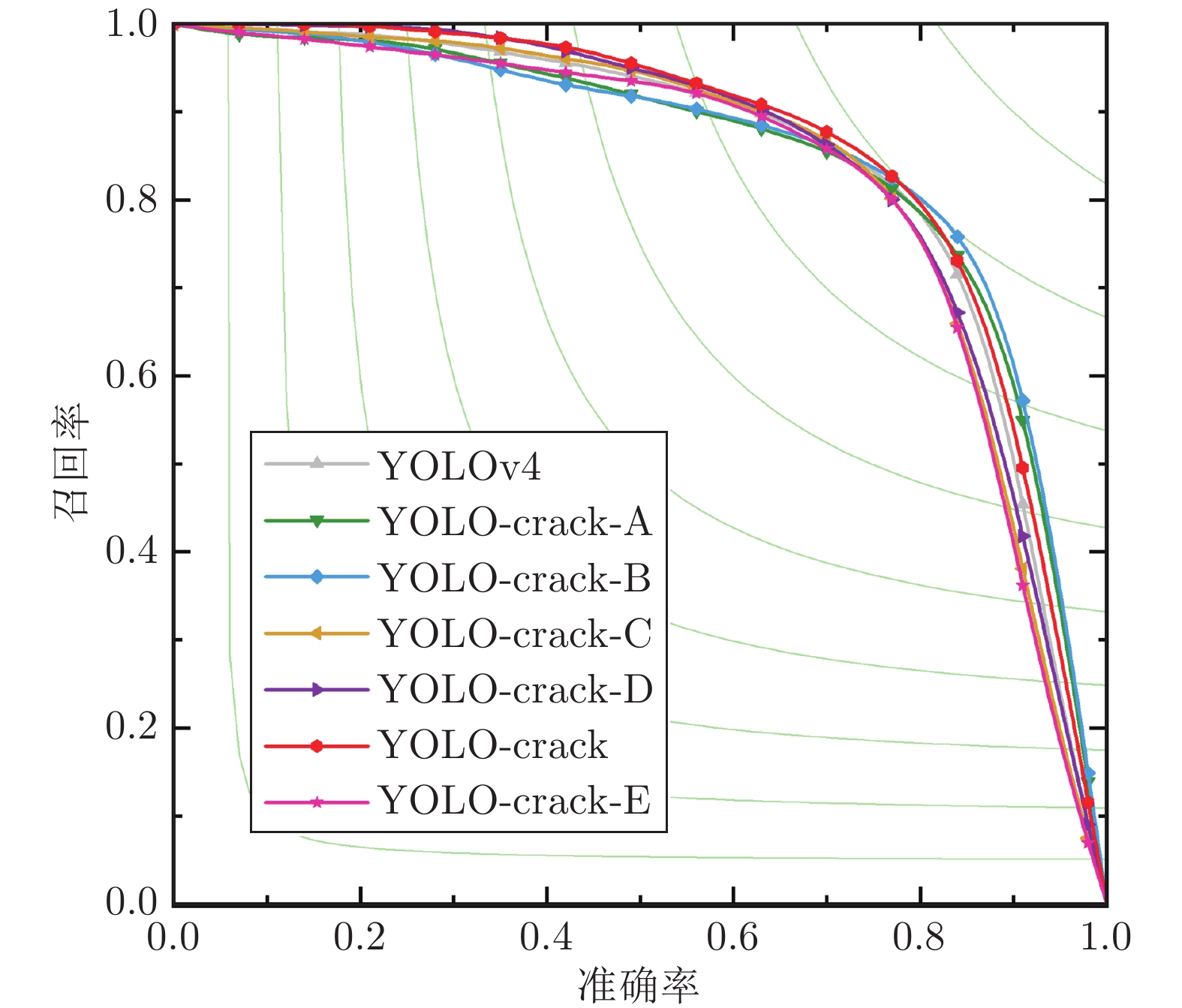
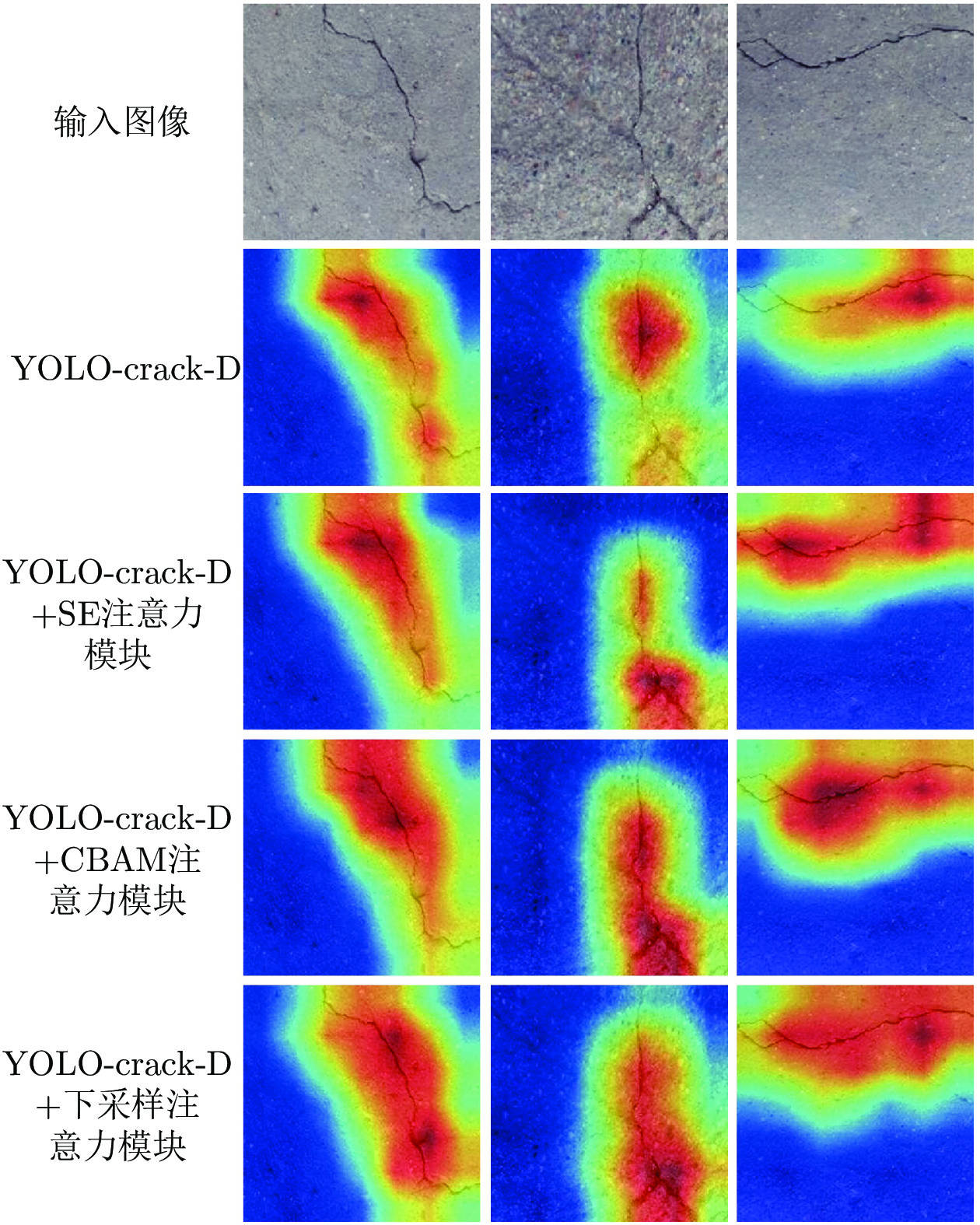
桥梁表观病害检测是确保桥梁安全的关键步骤. 然而, 桥梁表观病害类型多样, 不同病害间外观差异显著且病害之间可能发生重叠, 现有算法无法实现快速且准确的桥梁多病害检测. 针对这一问题, 对YOLO (You only look once) 进行了改进, 提出了YOLO-lump和YOLO-crack以提高网络检测多病害的能力, 进而形成基于双网络的桥梁表观病害快速检测算法. 一方面, YOLO-lump在较大的滑动窗口图像上实现块状病害的检测. 在YOLO-lump中, 提出了混合空洞金字塔模块, 其结合了混合空洞卷积与空间金字塔池化, 用于提取稀疏表达的多尺度特征, 同时可以避免空洞卷积造成的局部信息丢失; 另一方面, YOLO-crack在较小的滑动窗口图像上实现裂缝病害的检测. 在YOLO-crack中, 提出了下采样注意力模块, 利用1×1卷积和3×3分组卷积分别解耦特征的通道相关性和空间相关性, 可以增强裂缝在下采样阶段的前景响应, 减少空间信息的损失. 实验结果表明, 该算法能够提高桥梁表观病害检测的精度, 同时可实现病害的实时检测.
桥梁表观病害检测是确保桥梁安全的关键步骤. 然而, 桥梁表观病害类型多样, 不同病害间外观差异显著且病害之间可能发生重叠, 现有算法无法实现快速且准确的桥梁多病害检测. 针对这一问题, 对YOLO (You only look once) 进行了改进, 提出了YOLO-lump和YOLO-crack以提高网络检测多病害的能力, 进而形成基于双网络的桥梁表观病害快速检测算法. 一方面, YOLO-lump在较大的滑动窗口图像上实现块状病害的检测. 在YOLO-lump中, 提出了混合空洞金字塔模块, 其结合了混合空洞卷积与空间金字塔池化, 用于提取稀疏表达的多尺度特征, 同时可以避免空洞卷积造成的局部信息丢失; 另一方面, YOLO-crack在较小的滑动窗口图像上实现裂缝病害的检测. 在YOLO-crack中, 提出了下采样注意力模块, 利用1×1卷积和3×3分组卷积分别解耦特征的通道相关性和空间相关性, 可以增强裂缝在下采样阶段的前景响应, 减少空间信息的损失. 实验结果表明, 该算法能够提高桥梁表观病害检测的精度, 同时可实现病害的实时检测.



2022, 48(4): 1033-1047.
doi: 10.16383/j.aas.c210434
摘要:
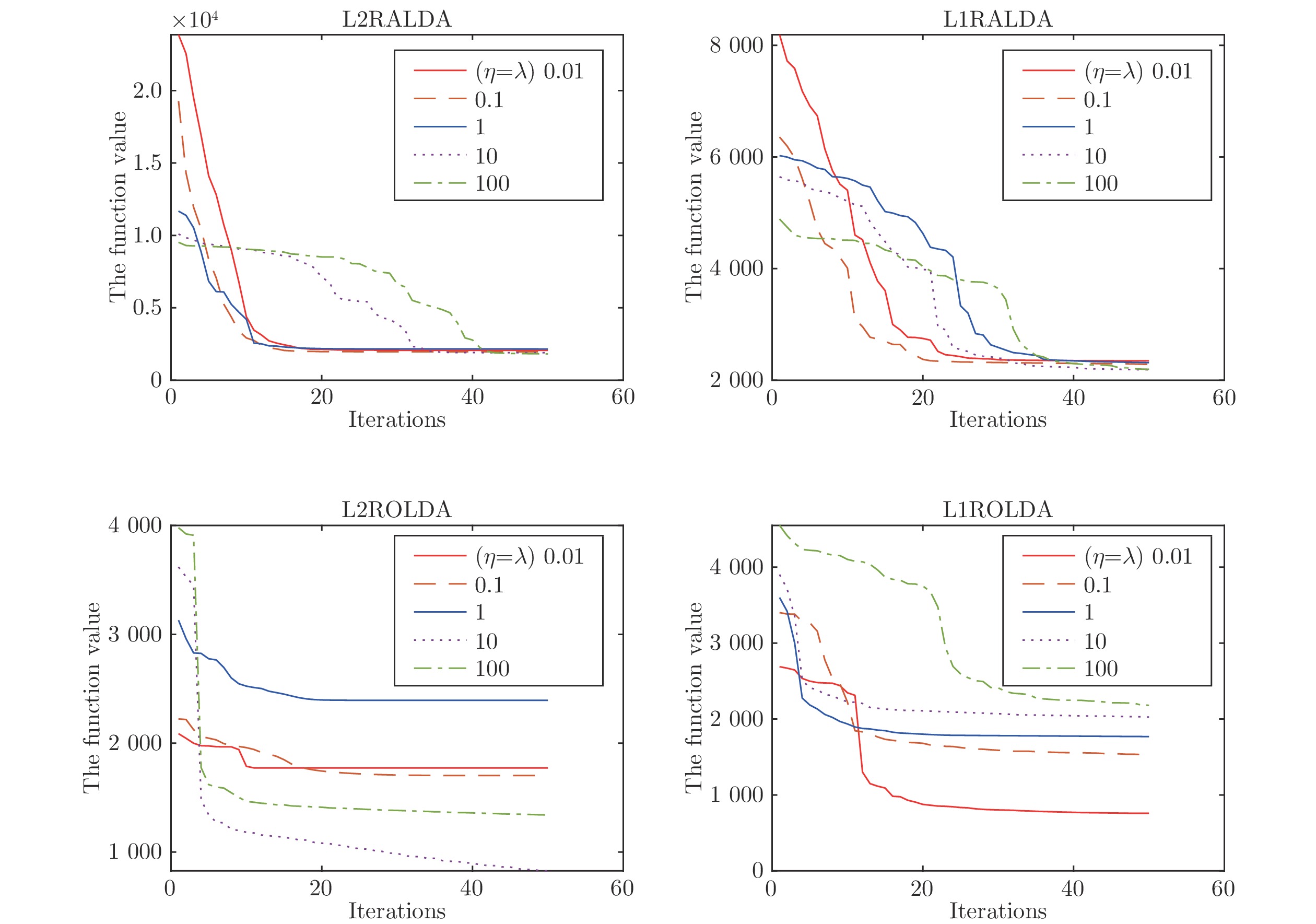
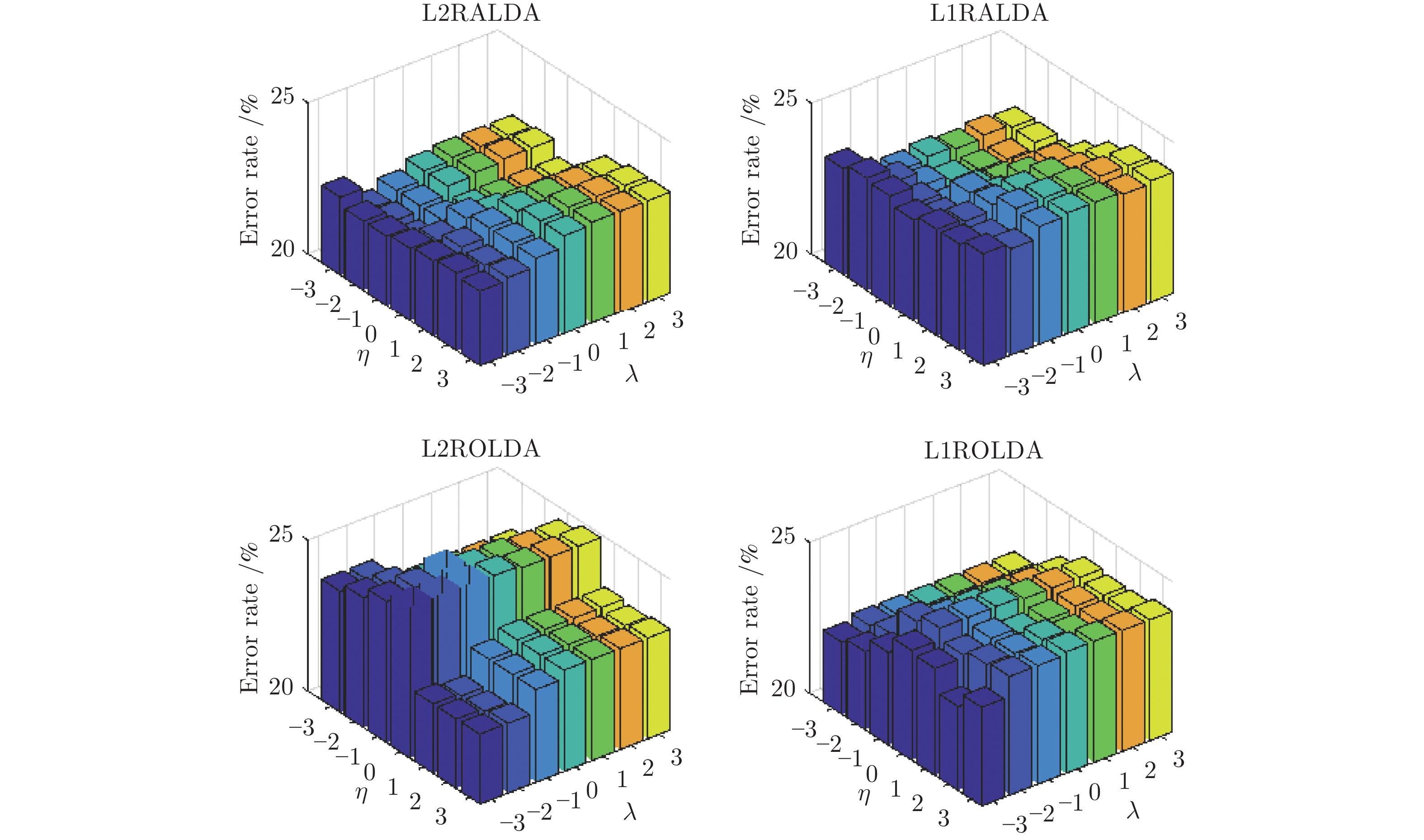
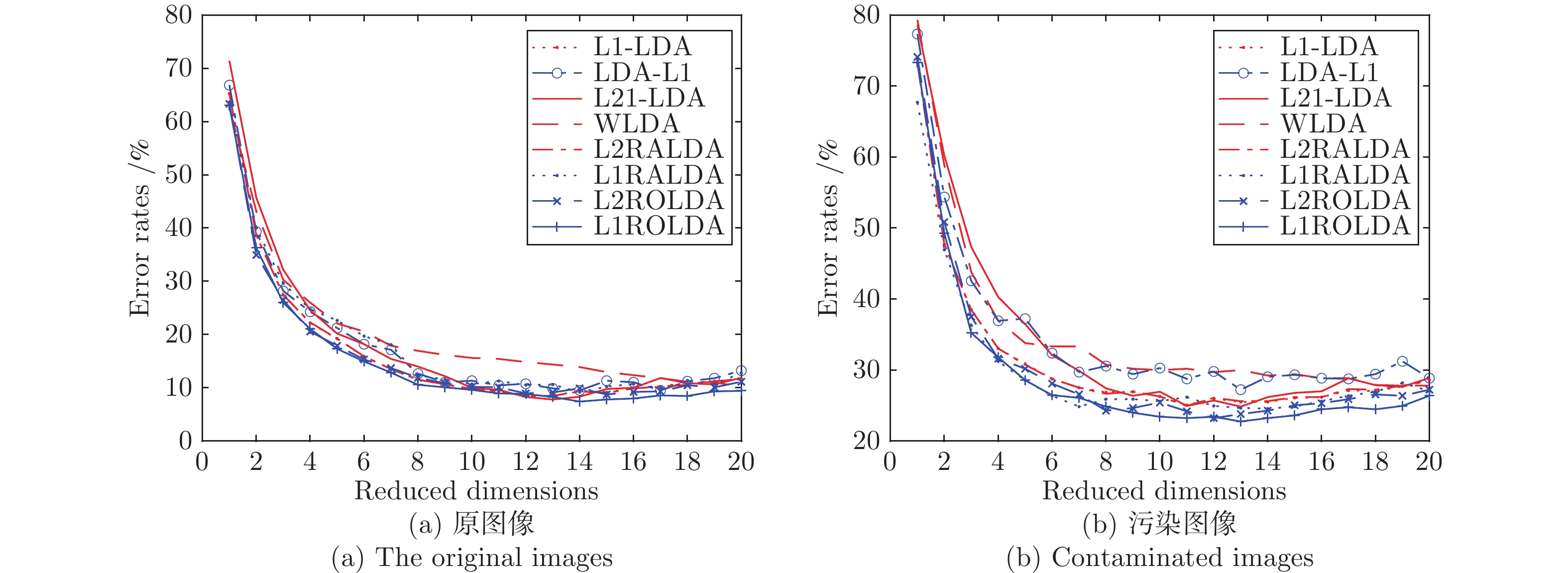
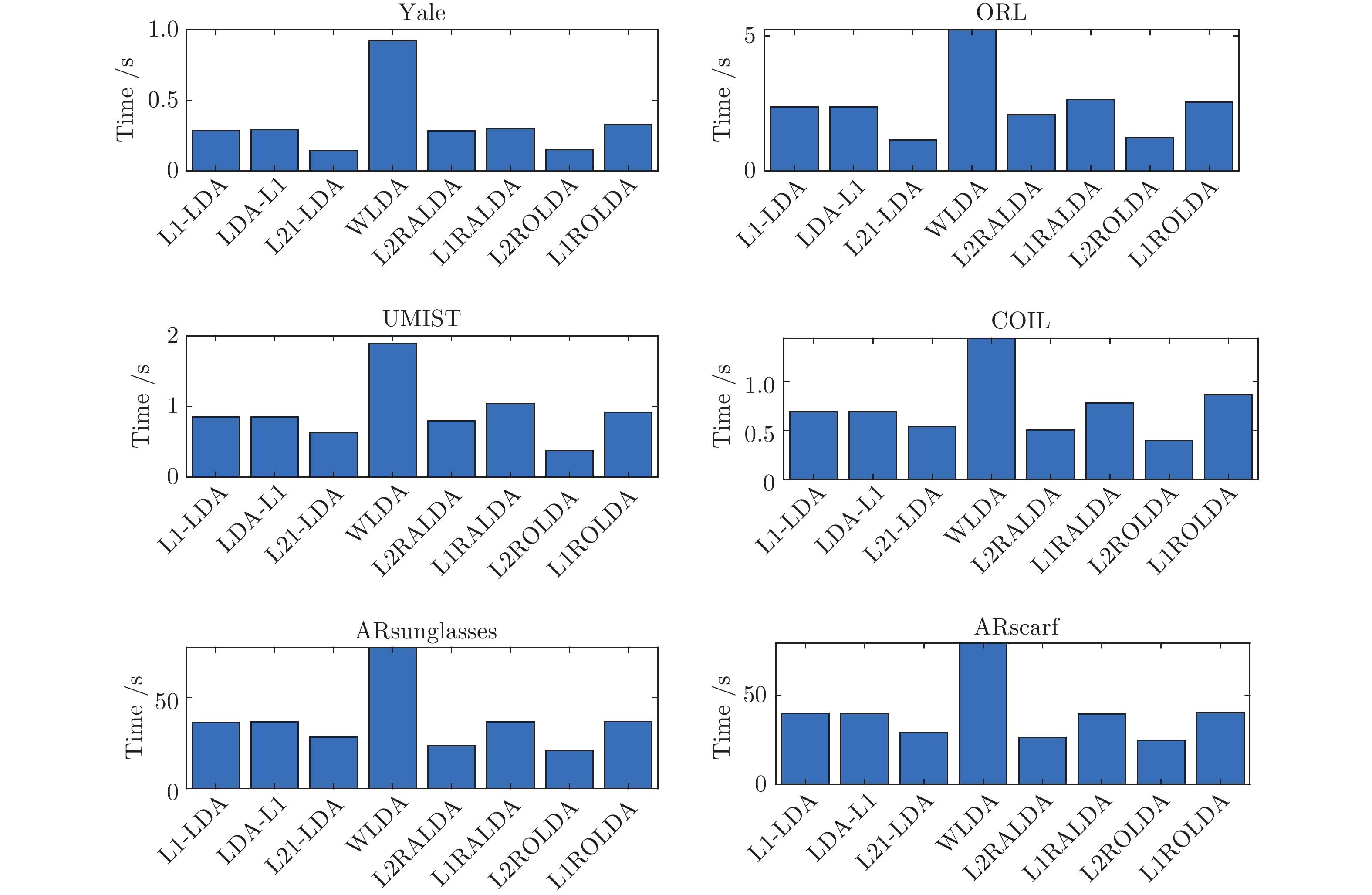
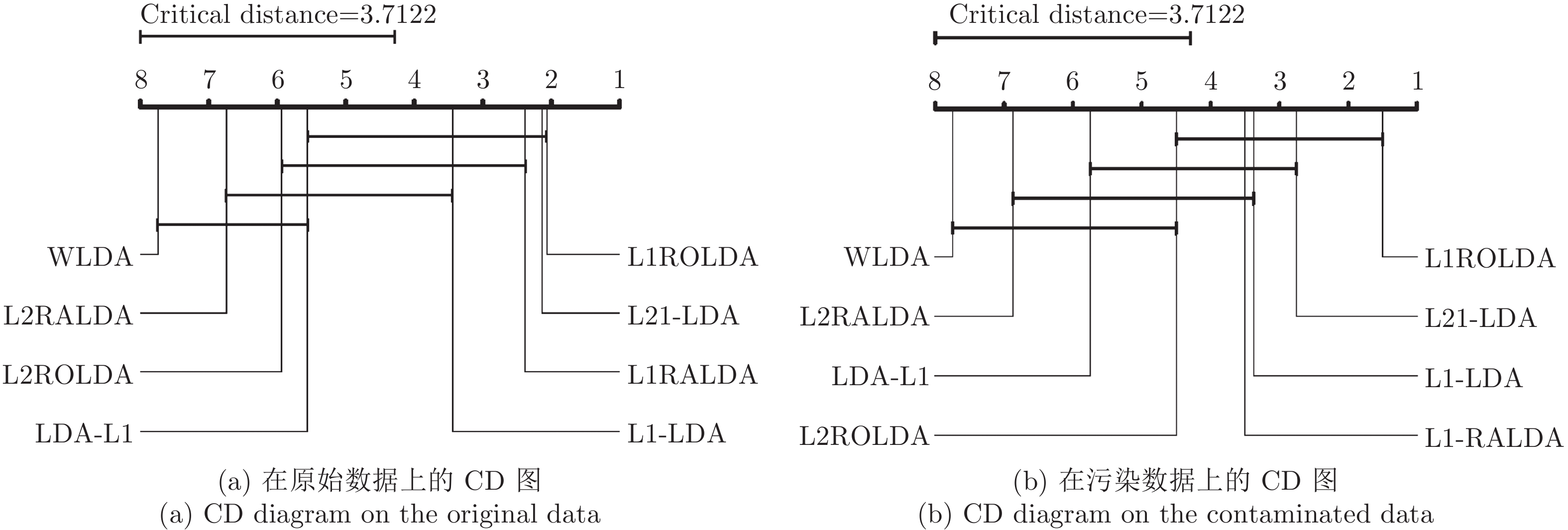
线性判别分析是一种统计学习方法. 针对线性判别分析的小样本奇异性问题和对污染样本敏感性问题, 目前许多线性判别分析的改进算法已被提出. 本文提出了基于Kullback-Leibler (KL)散度不确定集的判别分析方法. 提出的方法不仅利用了Ls范数定义类间距离和Lr范数定义类内距离, 而且对类内样本和各类中心的信息进行基于KL散度不确定集的概率建模. 首先通过优先考虑不利区分的样本提出了一种正则化对抗判别分析模型并利用广义Dinkelbach算法求解此模型. 这种算法的一个优点是在适当的条件下优化子问题不需要取得精确解. 投影(次)梯度法被用来求解优化子问题. 此外, 也提出了正则化乐观判别分析并采用交替优化技术求解广义Dinkelbach算法的优化子问题. 许多数据集上的实验表明了本文的模型优于现有的一些模型, 特别是在污染的数据集上, 正则化乐观判别分析由于优先考虑了类中心附近的样本点, 从而表现出良好的性能.
线性判别分析是一种统计学习方法. 针对线性判别分析的小样本奇异性问题和对污染样本敏感性问题, 目前许多线性判别分析的改进算法已被提出. 本文提出了基于Kullback-Leibler (KL)散度不确定集的判别分析方法. 提出的方法不仅利用了Ls范数定义类间距离和Lr范数定义类内距离, 而且对类内样本和各类中心的信息进行基于KL散度不确定集的概率建模. 首先通过优先考虑不利区分的样本提出了一种正则化对抗判别分析模型并利用广义Dinkelbach算法求解此模型. 这种算法的一个优点是在适当的条件下优化子问题不需要取得精确解. 投影(次)梯度法被用来求解优化子问题. 此外, 也提出了正则化乐观判别分析并采用交替优化技术求解广义Dinkelbach算法的优化子问题. 许多数据集上的实验表明了本文的模型优于现有的一些模型, 特别是在污染的数据集上, 正则化乐观判别分析由于优先考虑了类中心附近的样本点, 从而表现出良好的性能.
2022, 48(4): 1048-1059.
doi: 10.16383/j.aas.c200900
摘要:
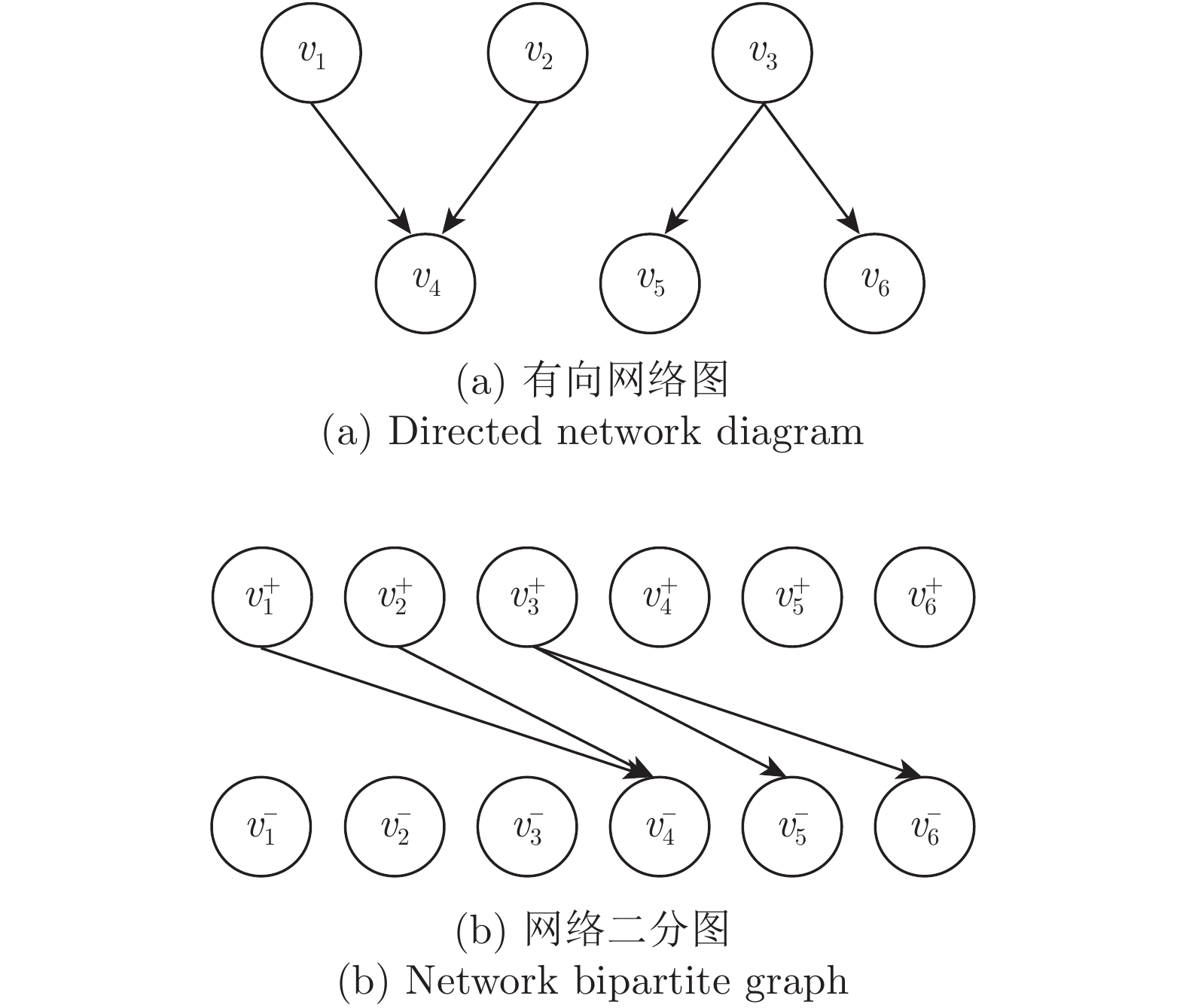
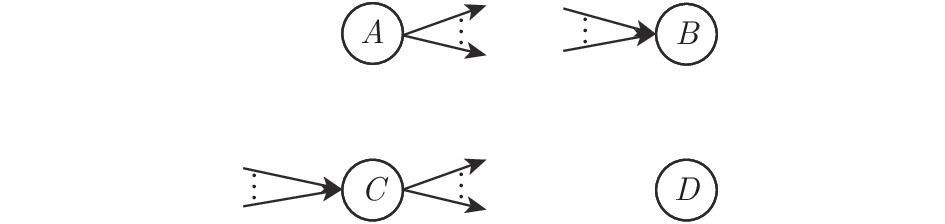
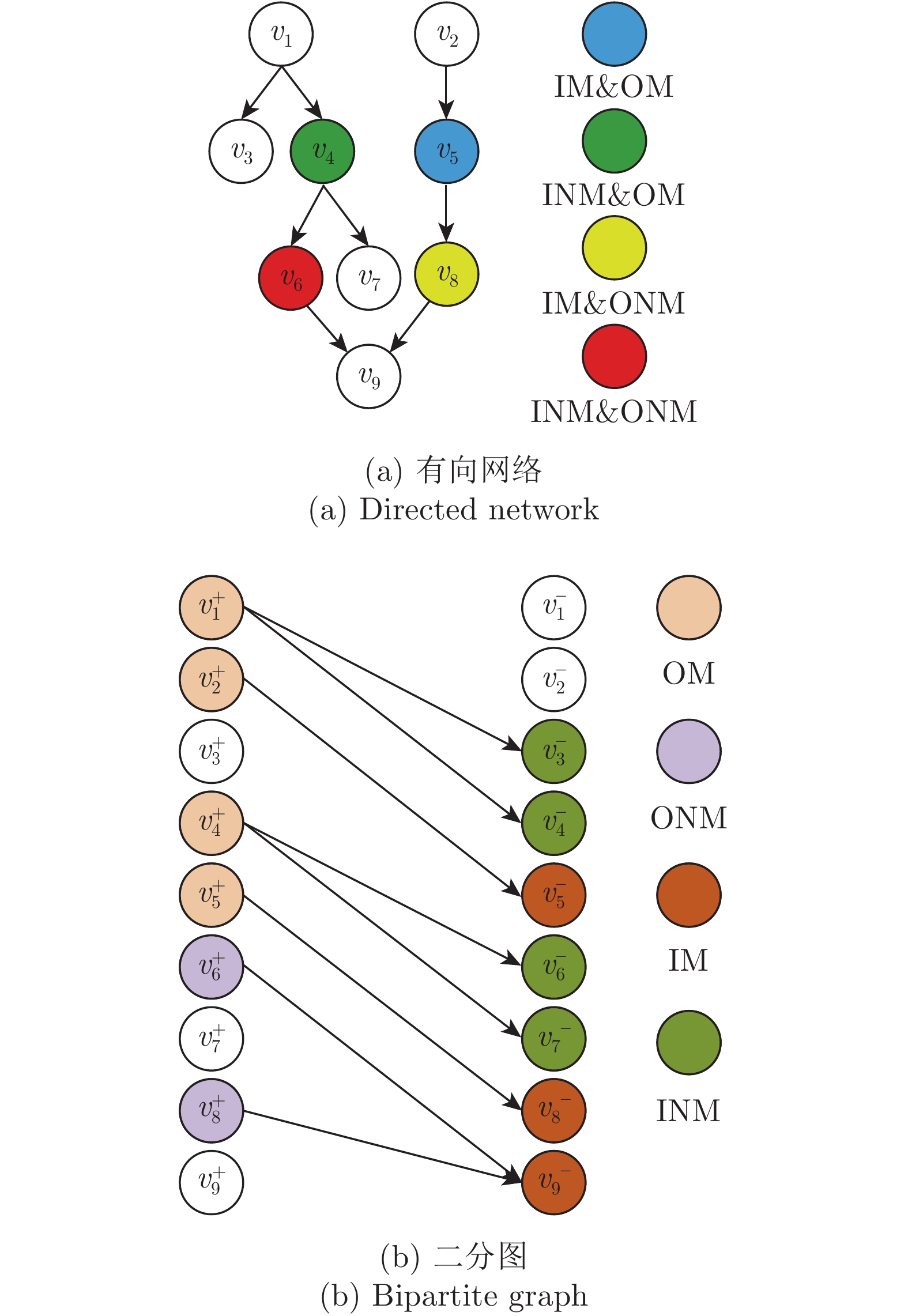
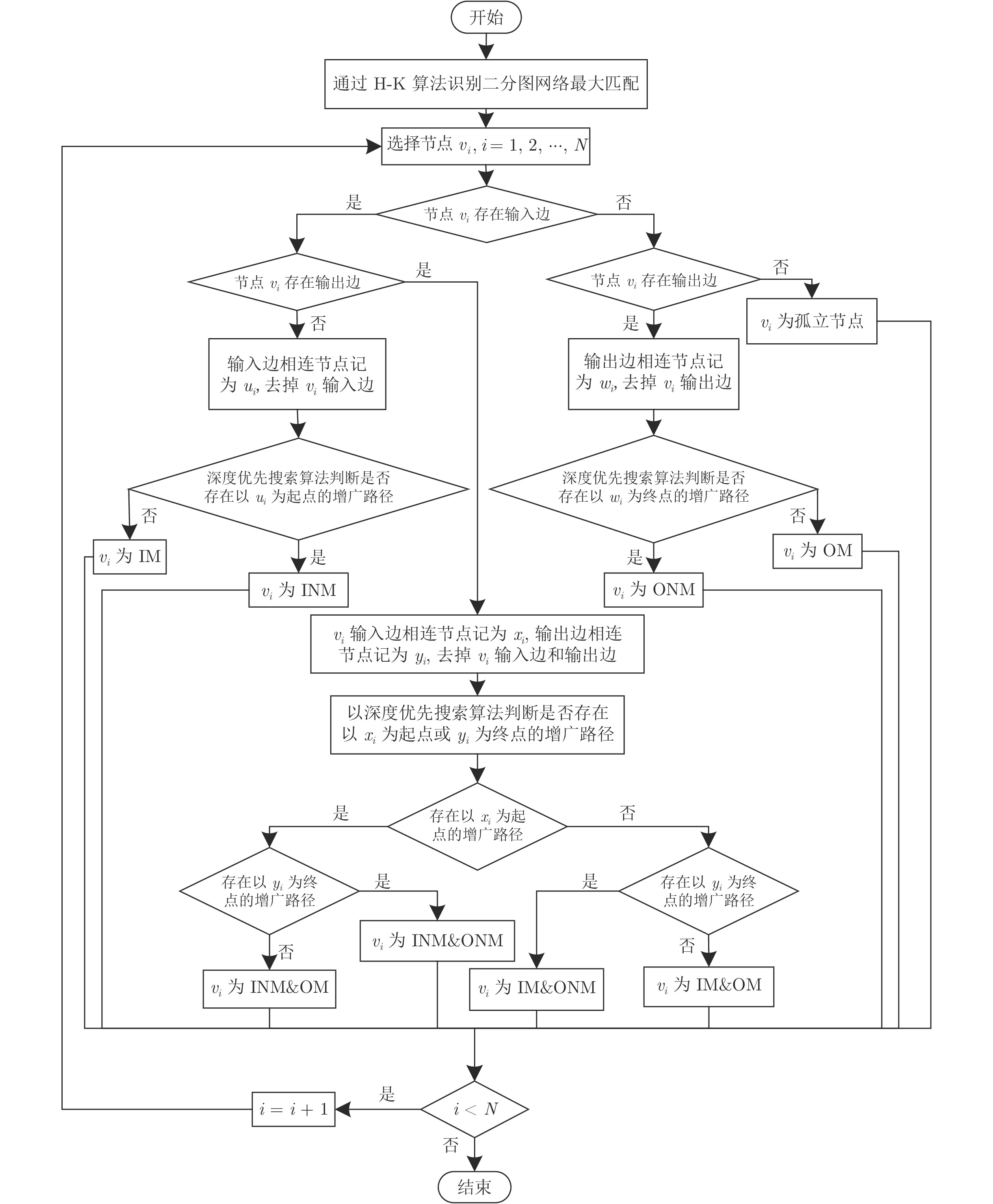
复杂系统间的相互作用能够用复杂网络描述. 复杂网络中某些节点遭受攻击或破坏会造成网络故障, 导致整个网络能控性变化. 不同节点失效会对网络能控性有不同的影响. 本文提出一种网络节点的分类方式, 将网络中的节点根据边的方向和匹配关系分成九种类型, 并给出了辨识节点类型的算法. 另外, 本文给出了基于此分类方式下复杂网络中某类节点失效时, 网络中驱动节点数量(用来衡量网络能控性大小的指标)的变化规律. 并通过模型网络进行仿真实验, 验证了当节点失效时本文给出的驱动节点数量变化情况, 同时还分析社交网络中不同类型节点的占比与实际中人际交往的对应关系.
复杂系统间的相互作用能够用复杂网络描述. 复杂网络中某些节点遭受攻击或破坏会造成网络故障, 导致整个网络能控性变化. 不同节点失效会对网络能控性有不同的影响. 本文提出一种网络节点的分类方式, 将网络中的节点根据边的方向和匹配关系分成九种类型, 并给出了辨识节点类型的算法. 另外, 本文给出了基于此分类方式下复杂网络中某类节点失效时, 网络中驱动节点数量(用来衡量网络能控性大小的指标)的变化规律. 并通过模型网络进行仿真实验, 验证了当节点失效时本文给出的驱动节点数量变化情况, 同时还分析社交网络中不同类型节点的占比与实际中人际交往的对应关系.


2022, 48(4): 1060-1078.
doi: 10.16383/j.aas.c200483
摘要:
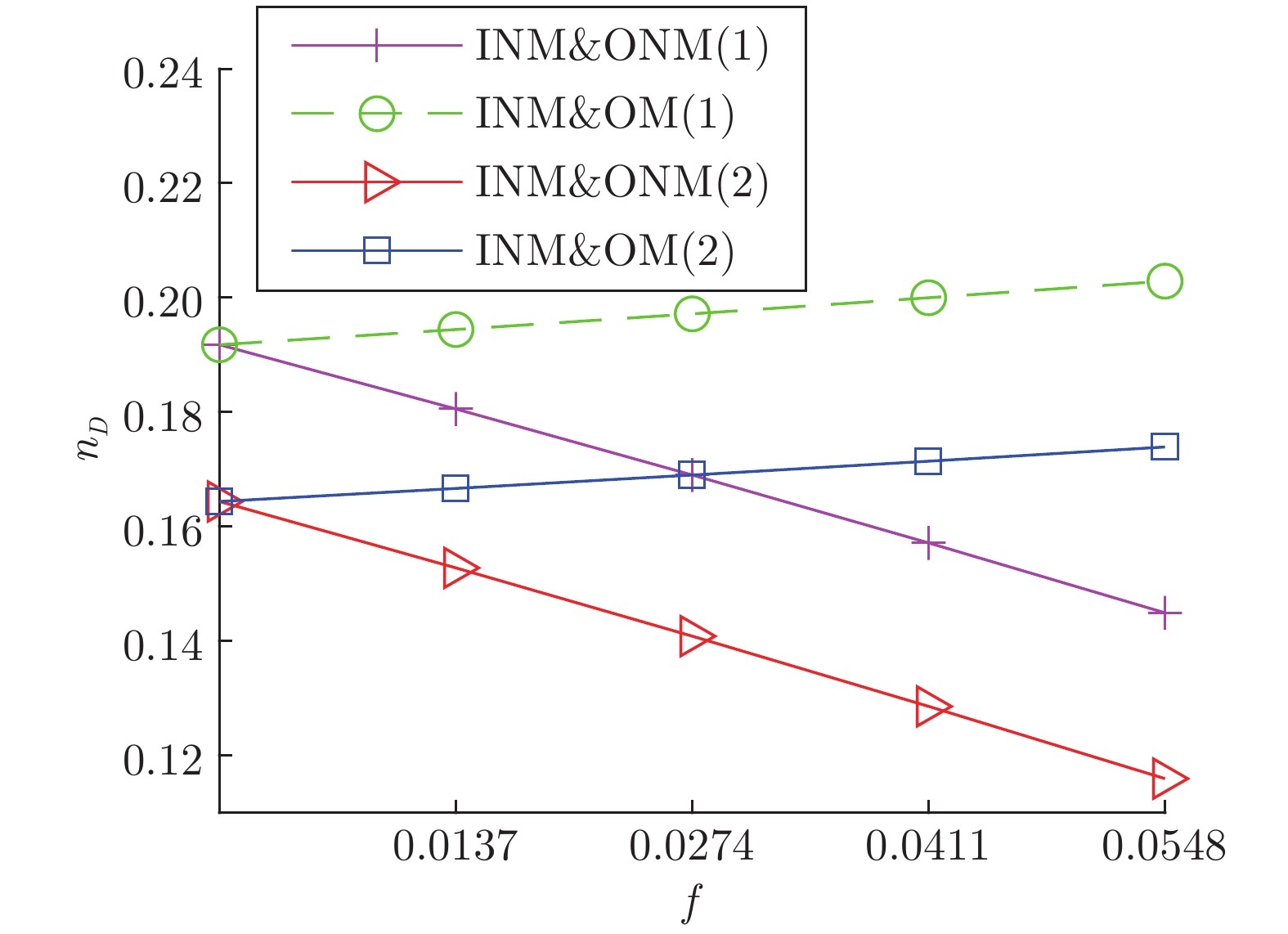
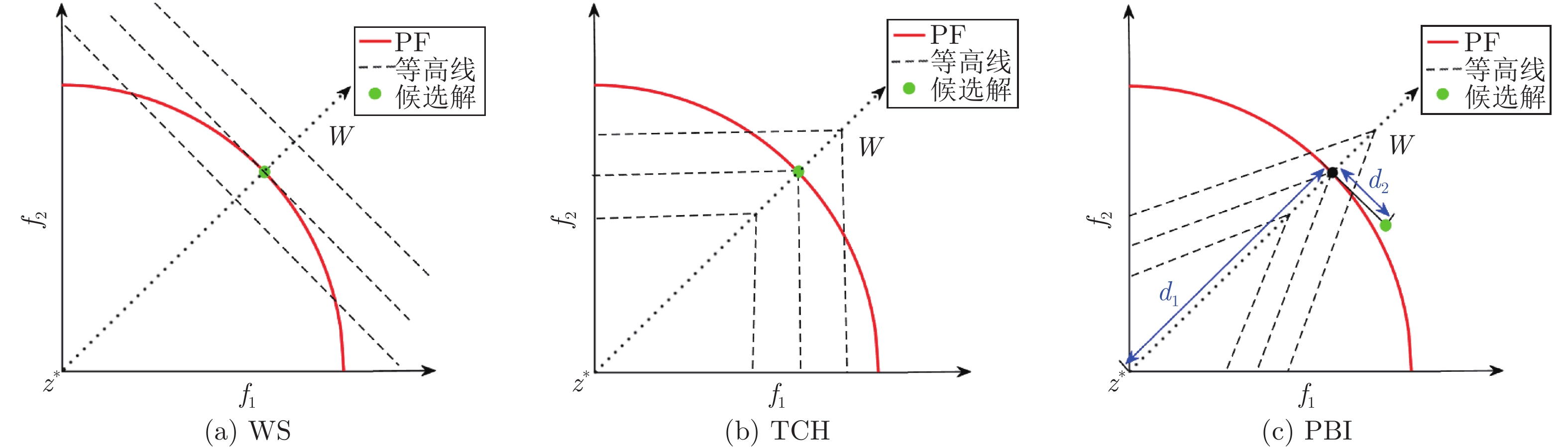
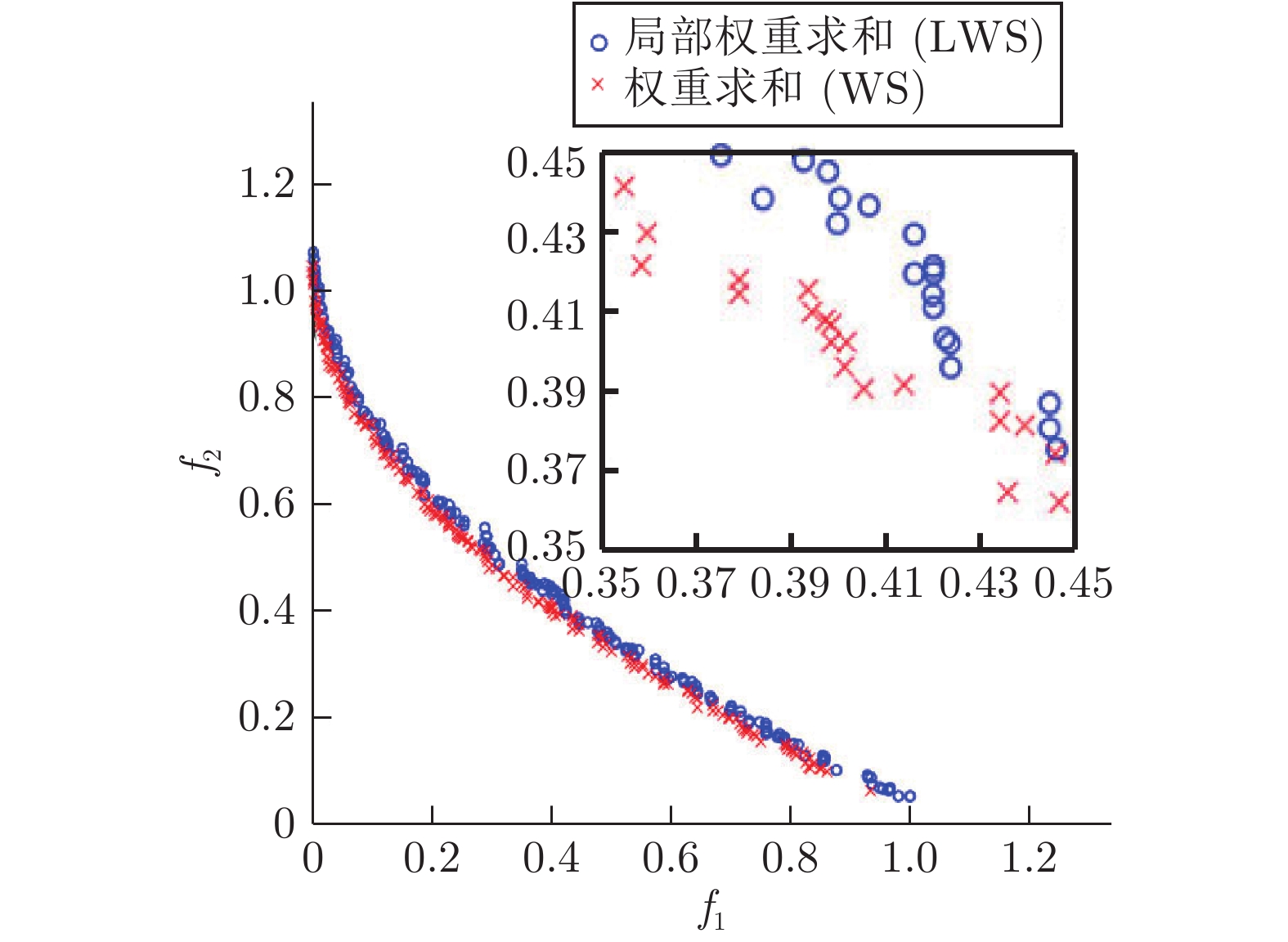
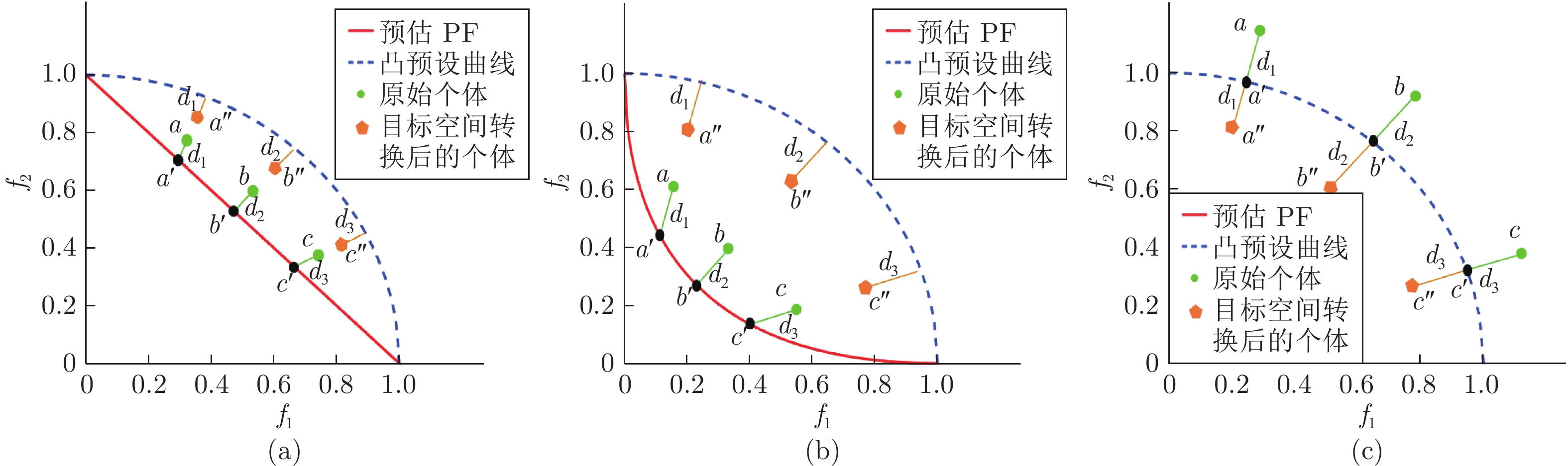
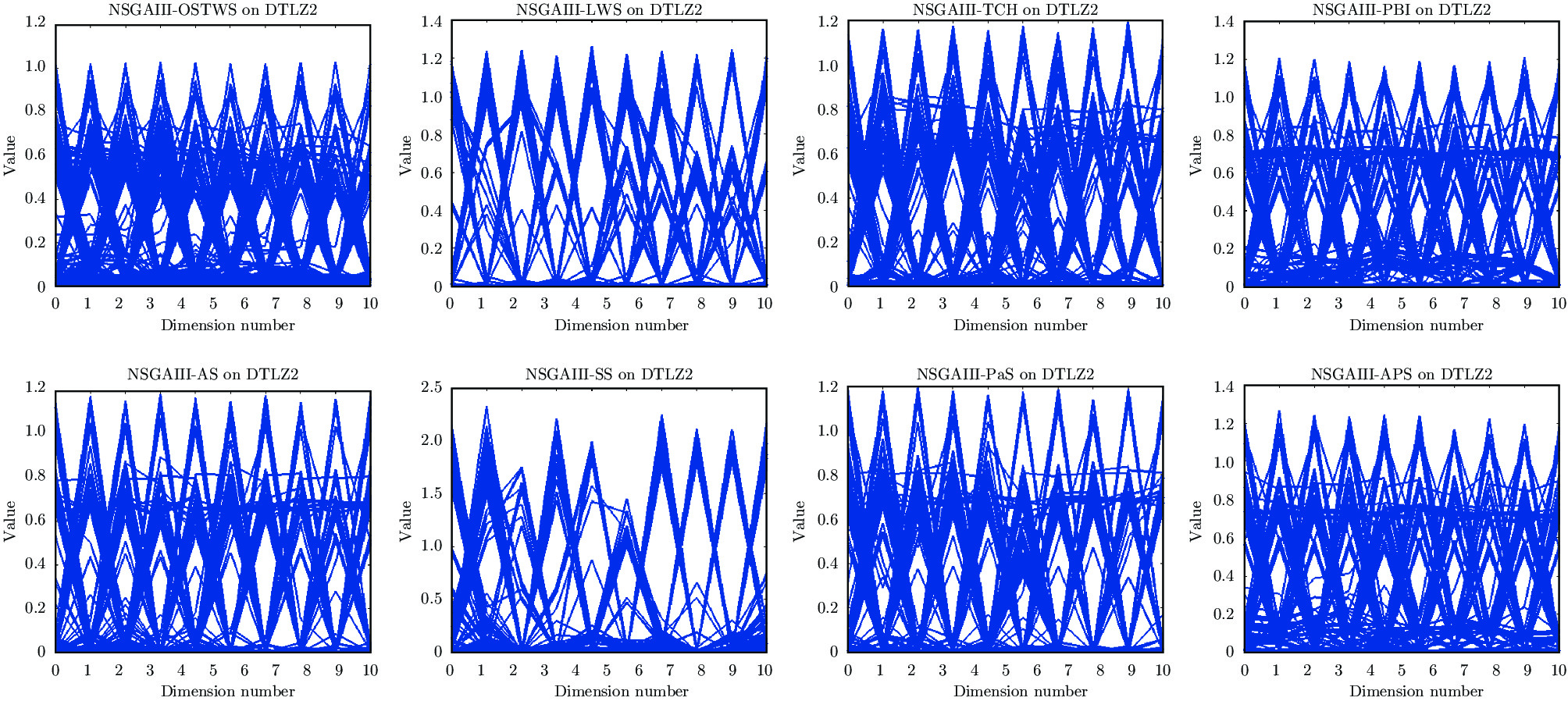
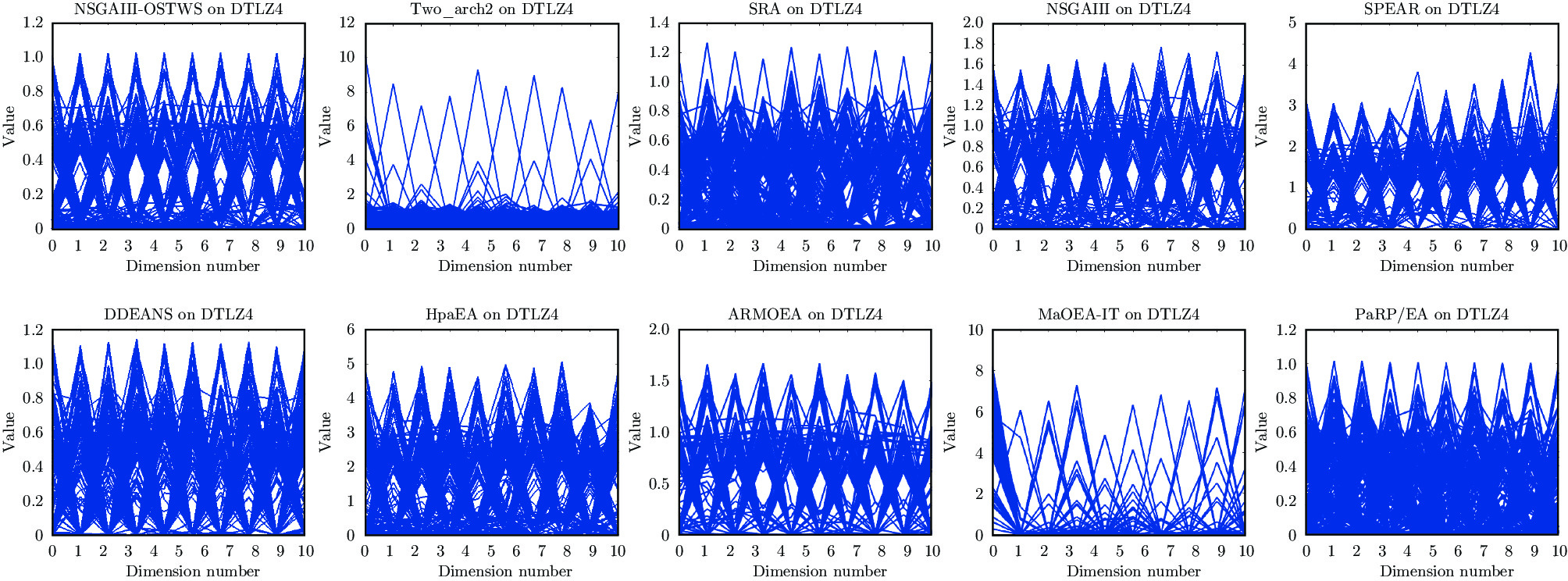
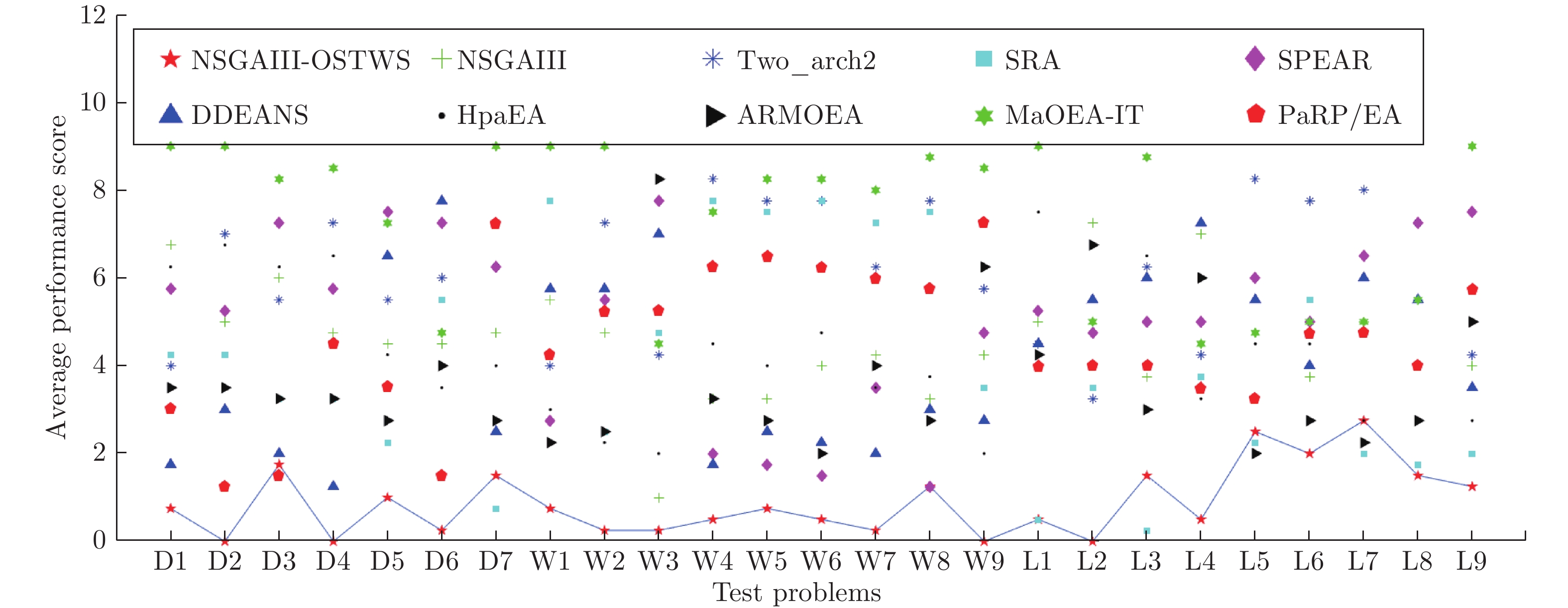
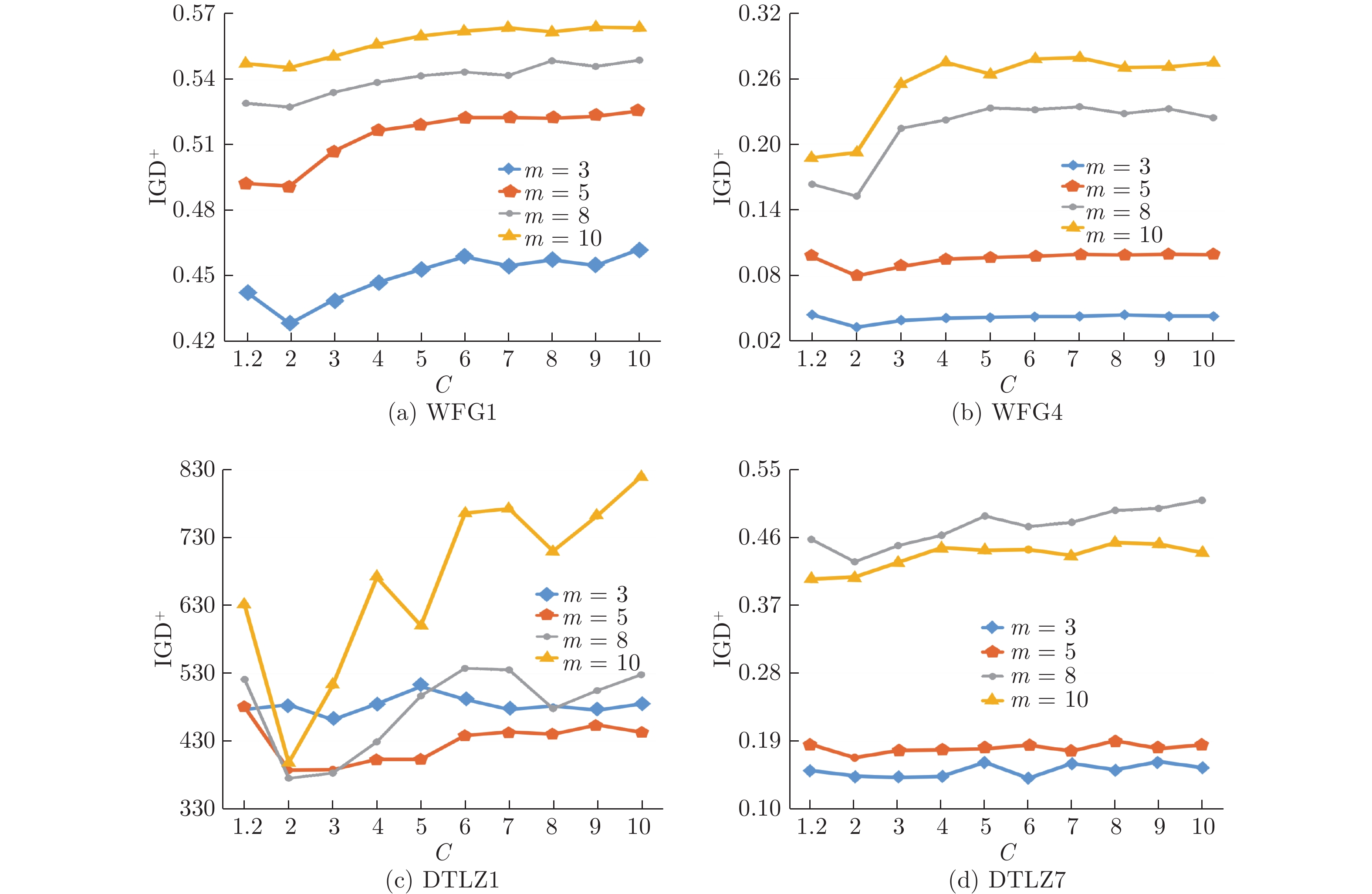
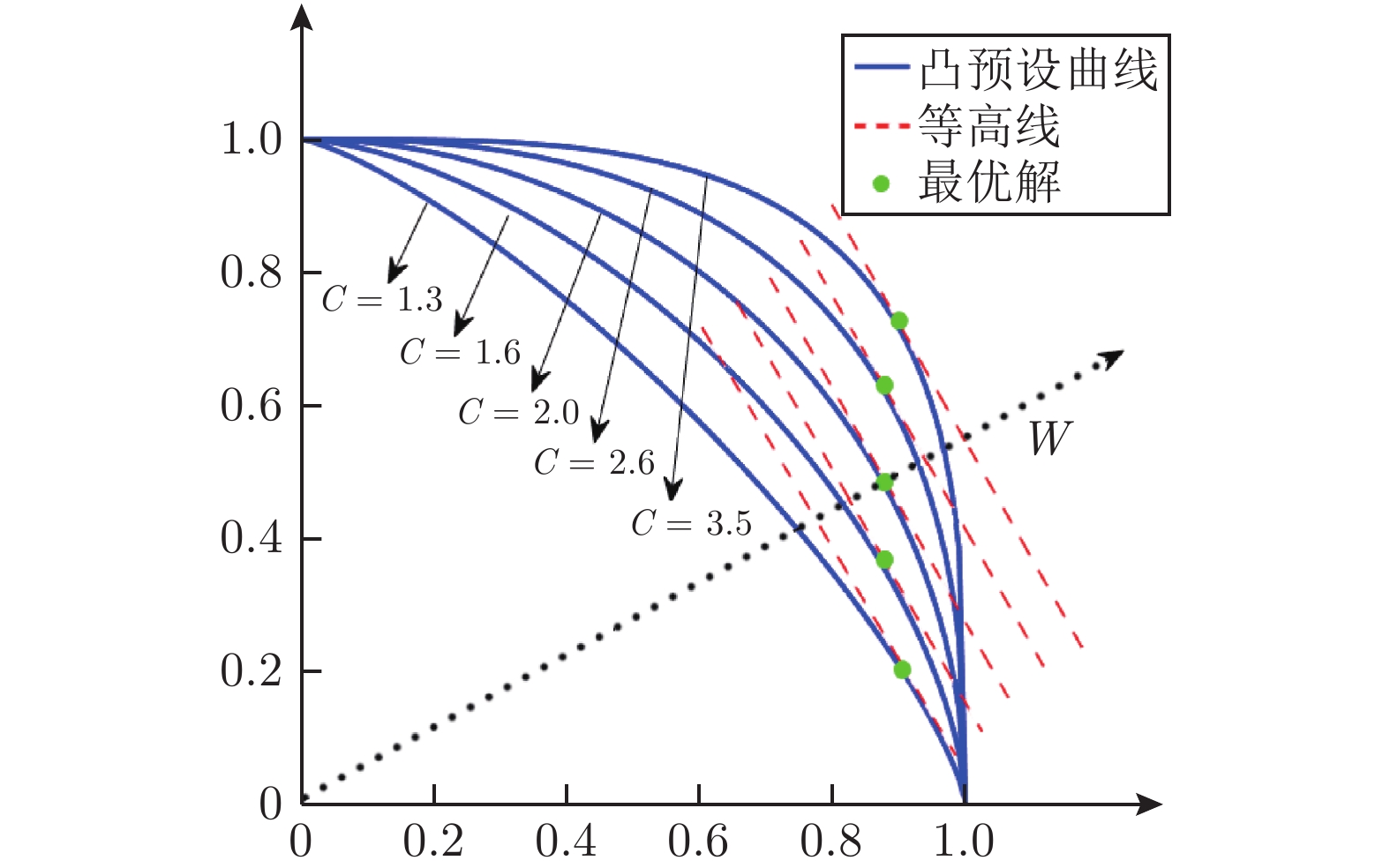
权重求和是基于分解的超多目标进化算法中常用的方法, 相比其他方法具有计算简单、搜索效率高等优点, 但难以有效处理帕累托前沿面(Pareto optimal front, PF)为非凸型的问题. 为充分发挥权重求和方法的优势, 同时又能处理好PF为非凸型的问题, 本文提出了一种基于目标空间转换权重求和的超多目标进化算法, 简称NSGAIII-OSTWS. 该算法的核心是将各种问题的PF转换为凸型曲面, 再利用权重求和方法进行优化. 具体地, 首先利用预估PF的形状计算个体到预估PF的距离; 然后, 根据该距离值将个体映射到目标空间中预估凸型曲面与理想点之间的对应位置; 最后, 采用权重求和函数计算出映射后个体的适应值, 据此实现对问题的进化优化. 为验证NSGAIII-OSTWS的有效性, 将NSGAIII-OSTWS与7个NSGAIII的变体, 以及9个具有代表性的先进超多目标进化算法在WFG、DTLZ和LSMOP基准问题上进行对比, 实验结果表明NSGAIII-OSTWS具备明显的竞争性能.
权重求和是基于分解的超多目标进化算法中常用的方法, 相比其他方法具有计算简单、搜索效率高等优点, 但难以有效处理帕累托前沿面(Pareto optimal front, PF)为非凸型的问题. 为充分发挥权重求和方法的优势, 同时又能处理好PF为非凸型的问题, 本文提出了一种基于目标空间转换权重求和的超多目标进化算法, 简称NSGAIII-OSTWS. 该算法的核心是将各种问题的PF转换为凸型曲面, 再利用权重求和方法进行优化. 具体地, 首先利用预估PF的形状计算个体到预估PF的距离; 然后, 根据该距离值将个体映射到目标空间中预估凸型曲面与理想点之间的对应位置; 最后, 采用权重求和函数计算出映射后个体的适应值, 据此实现对问题的进化优化. 为验证NSGAIII-OSTWS的有效性, 将NSGAIII-OSTWS与7个NSGAIII的变体, 以及9个具有代表性的先进超多目标进化算法在WFG、DTLZ和LSMOP基准问题上进行对比, 实验结果表明NSGAIII-OSTWS具备明显的竞争性能.

2022, 48(4): 1079-1090.
doi: 10.16383/j.aas.c200780
摘要:
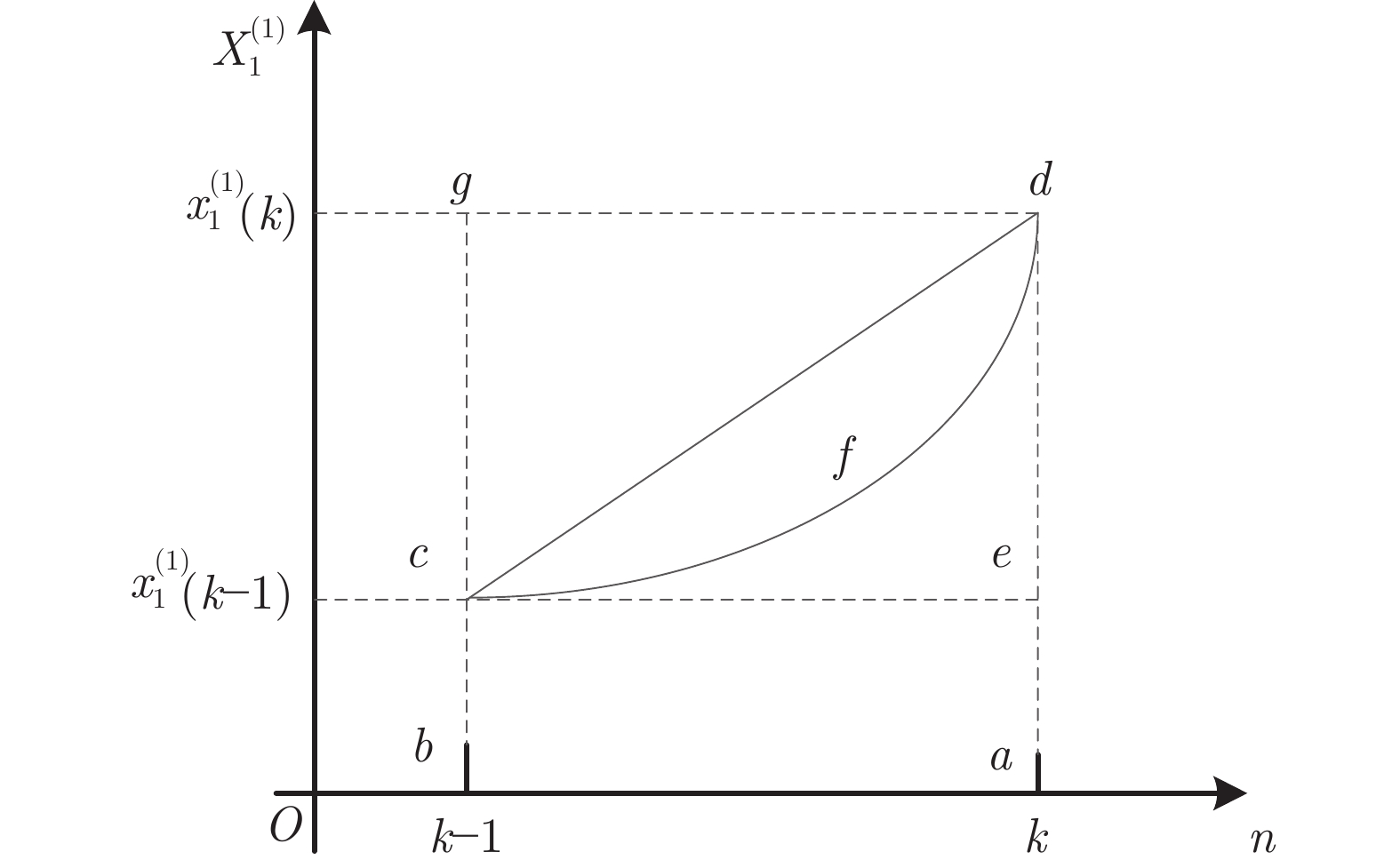
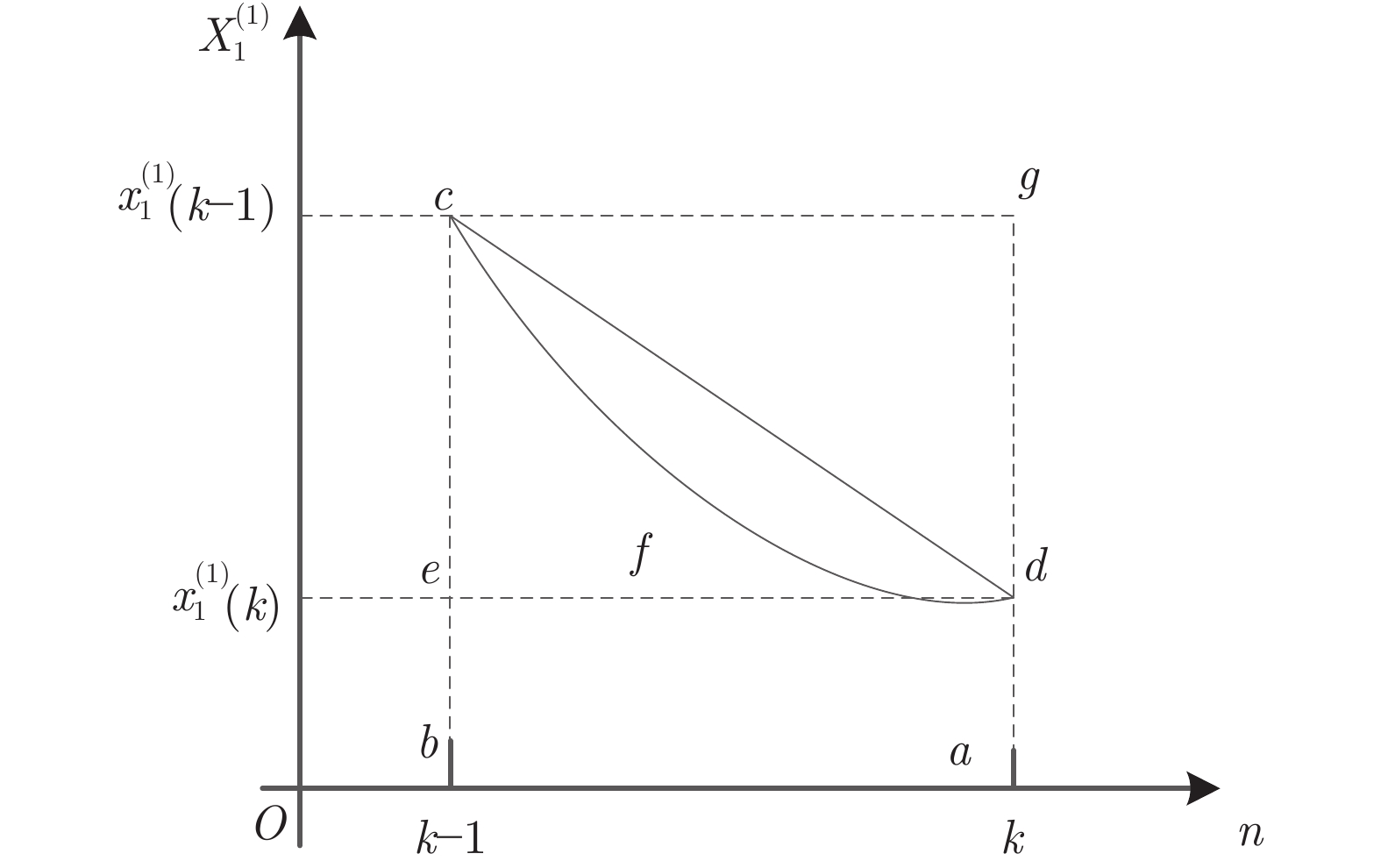
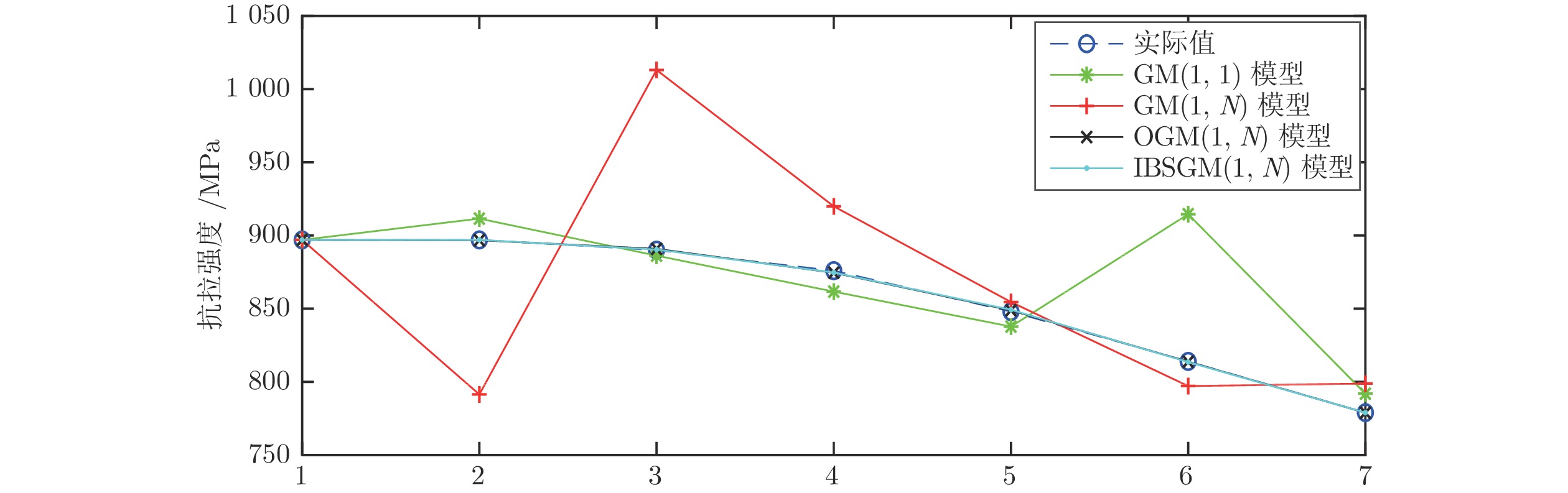
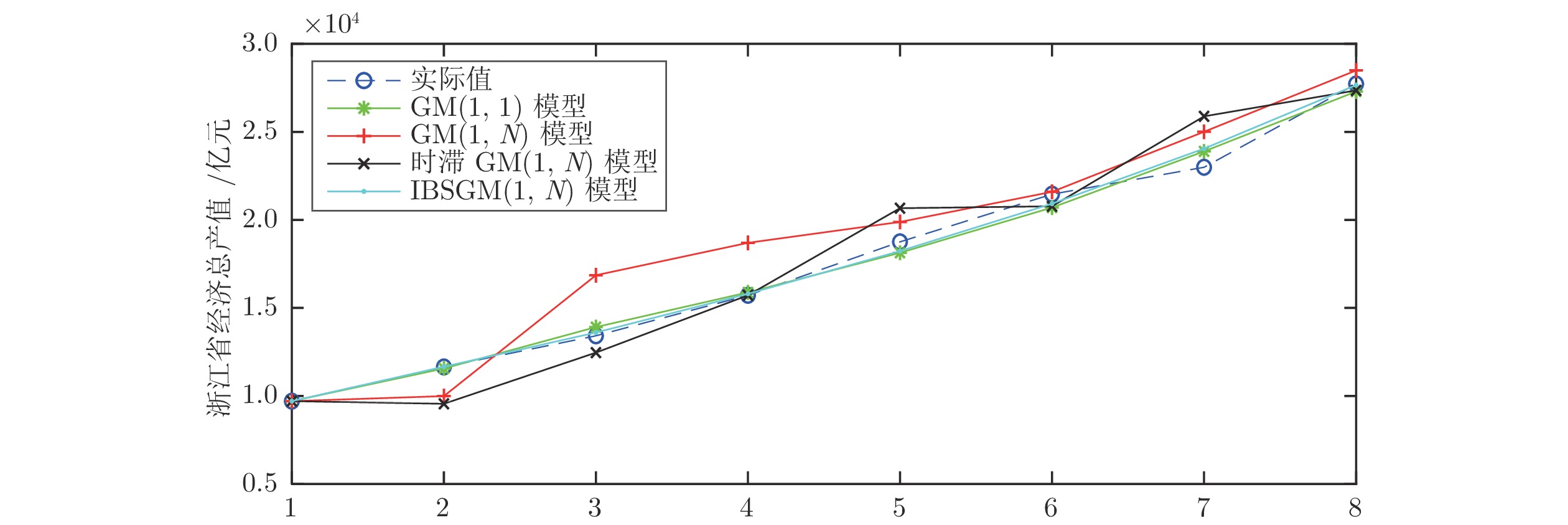
现有的多变量灰色预测模型的背景值估计误差及模型结构单一是导致该模型预测性能不稳定的重要因素, 致使该模型在实际预测领域中应用并不广泛. 本文通过分析背景值函数的几何意义, 结合积分几何面积公式, 提出一种改进的背景值优化方法, 使预测模型在背景值系数的选取上更加灵活.在此基础上, 模型中加入灰色作用量, 提出一种改进背景值及结构相容性的多维灰色预测模型(Improved background value and structure compatibility of grey prediction model, IBSGM(1, N)). 通过对模型参数的改变分析, 新模型理论上可达到与传统单变量和多变量灰色预测模型的兼容性. 为检验新模型的性能, 本文进行了三个案例对比分析, 实验结果表明, 与现有的灰色预测模型(Grey model, GM) GM(1, 1)和GM(1, N)相比较, 所提出的IBSGM(1, N)模型在背景值参数估计上误差明显减小, 结构相容性更强, 泛化性能更好, 具有更高的预测精度.
现有的多变量灰色预测模型的背景值估计误差及模型结构单一是导致该模型预测性能不稳定的重要因素, 致使该模型在实际预测领域中应用并不广泛. 本文通过分析背景值函数的几何意义, 结合积分几何面积公式, 提出一种改进的背景值优化方法, 使预测模型在背景值系数的选取上更加灵活.在此基础上, 模型中加入灰色作用量, 提出一种改进背景值及结构相容性的多维灰色预测模型(Improved background value and structure compatibility of grey prediction model, IBSGM(1, N)). 通过对模型参数的改变分析, 新模型理论上可达到与传统单变量和多变量灰色预测模型的兼容性. 为检验新模型的性能, 本文进行了三个案例对比分析, 实验结果表明, 与现有的灰色预测模型(Grey model, GM) GM(1, 1)和GM(1, N)相比较, 所提出的IBSGM(1, N)模型在背景值参数估计上误差明显减小, 结构相容性更强, 泛化性能更好, 具有更高的预测精度.

2022, 48(4): 1091-1104.
doi: 10.16383/j.aas.c200684
摘要:
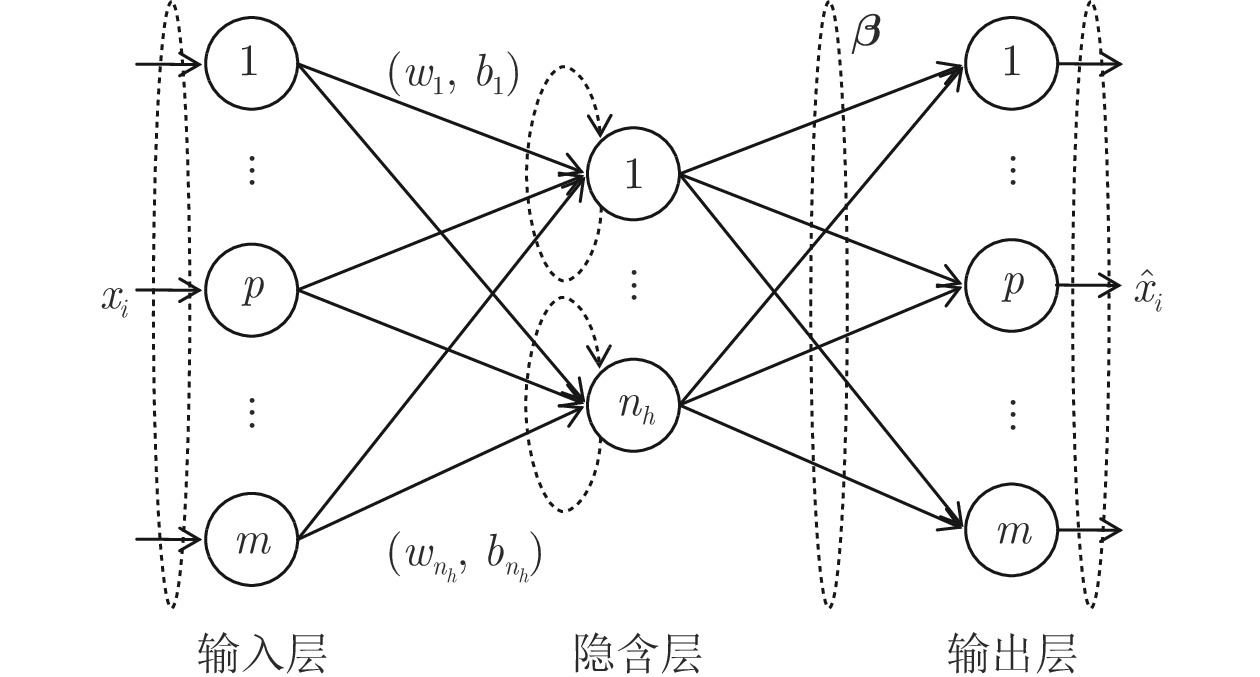
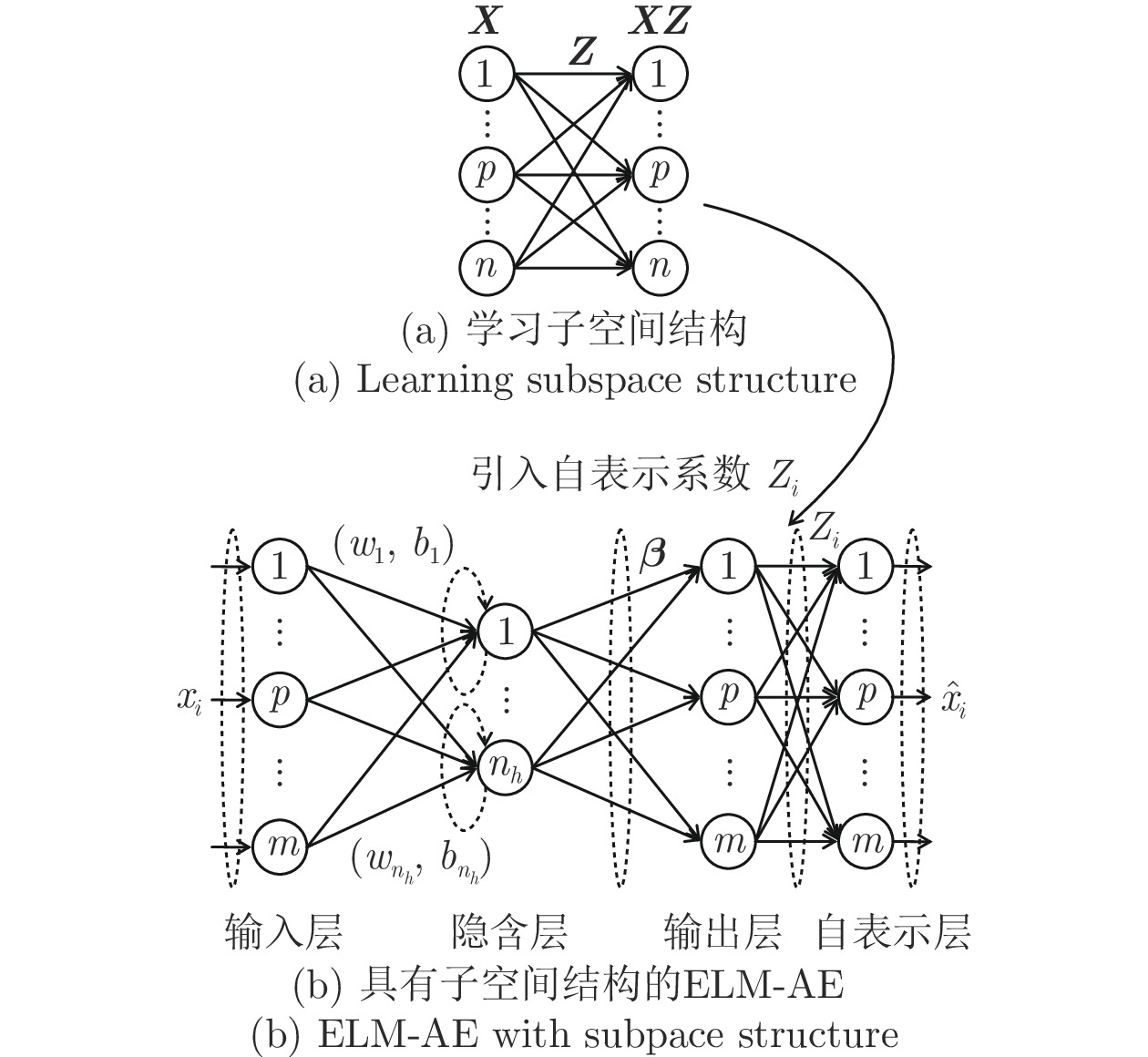
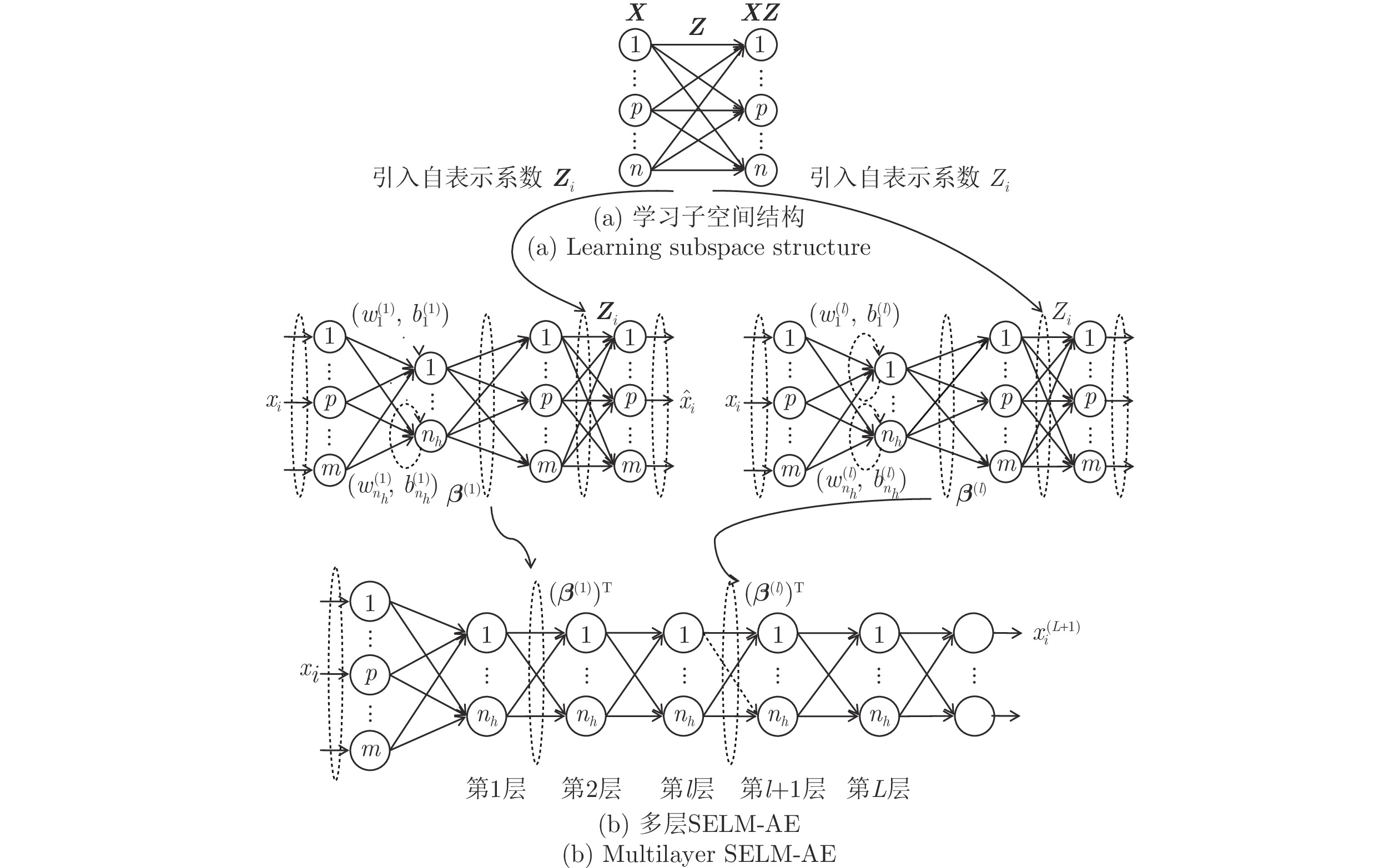
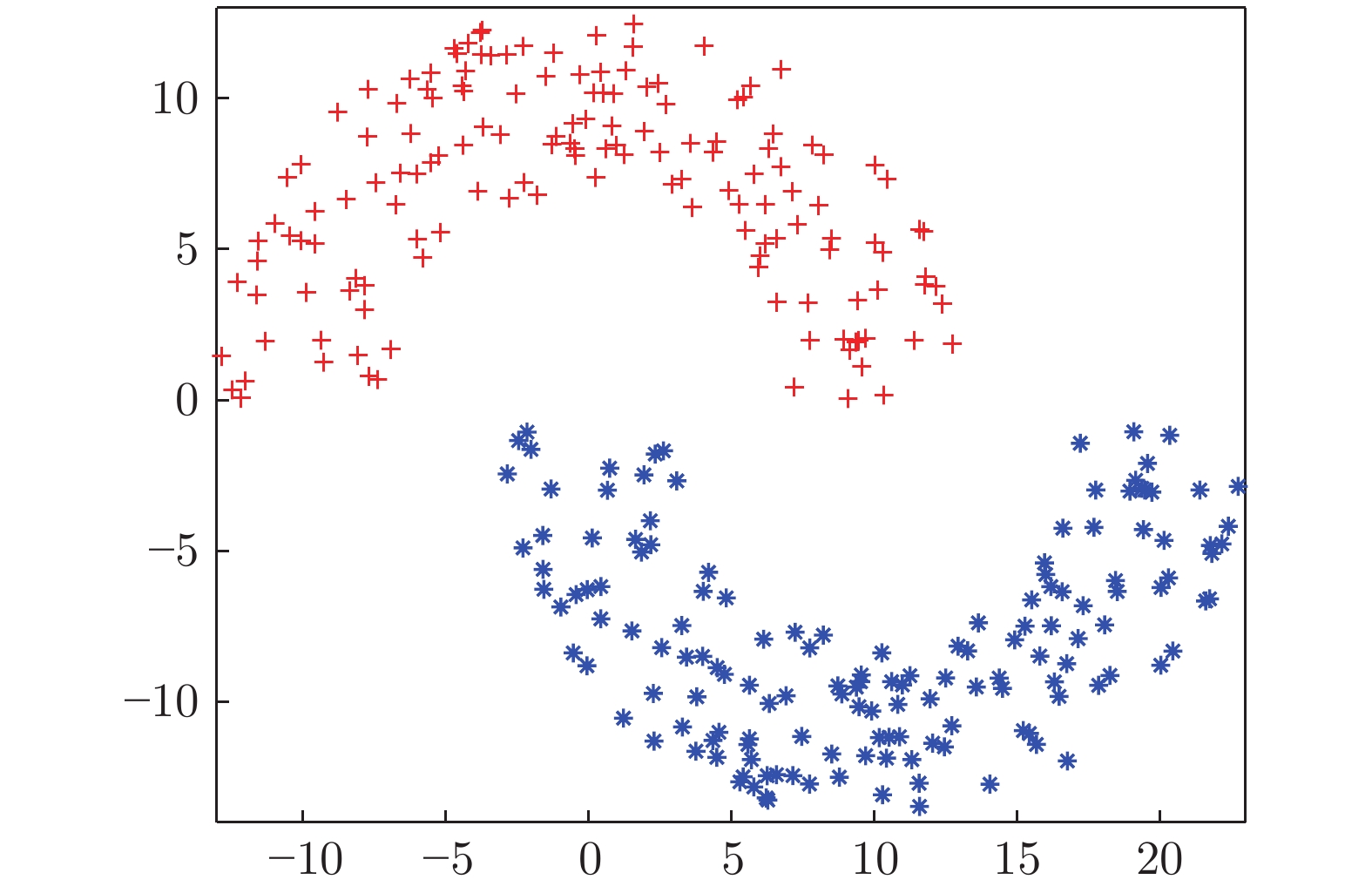
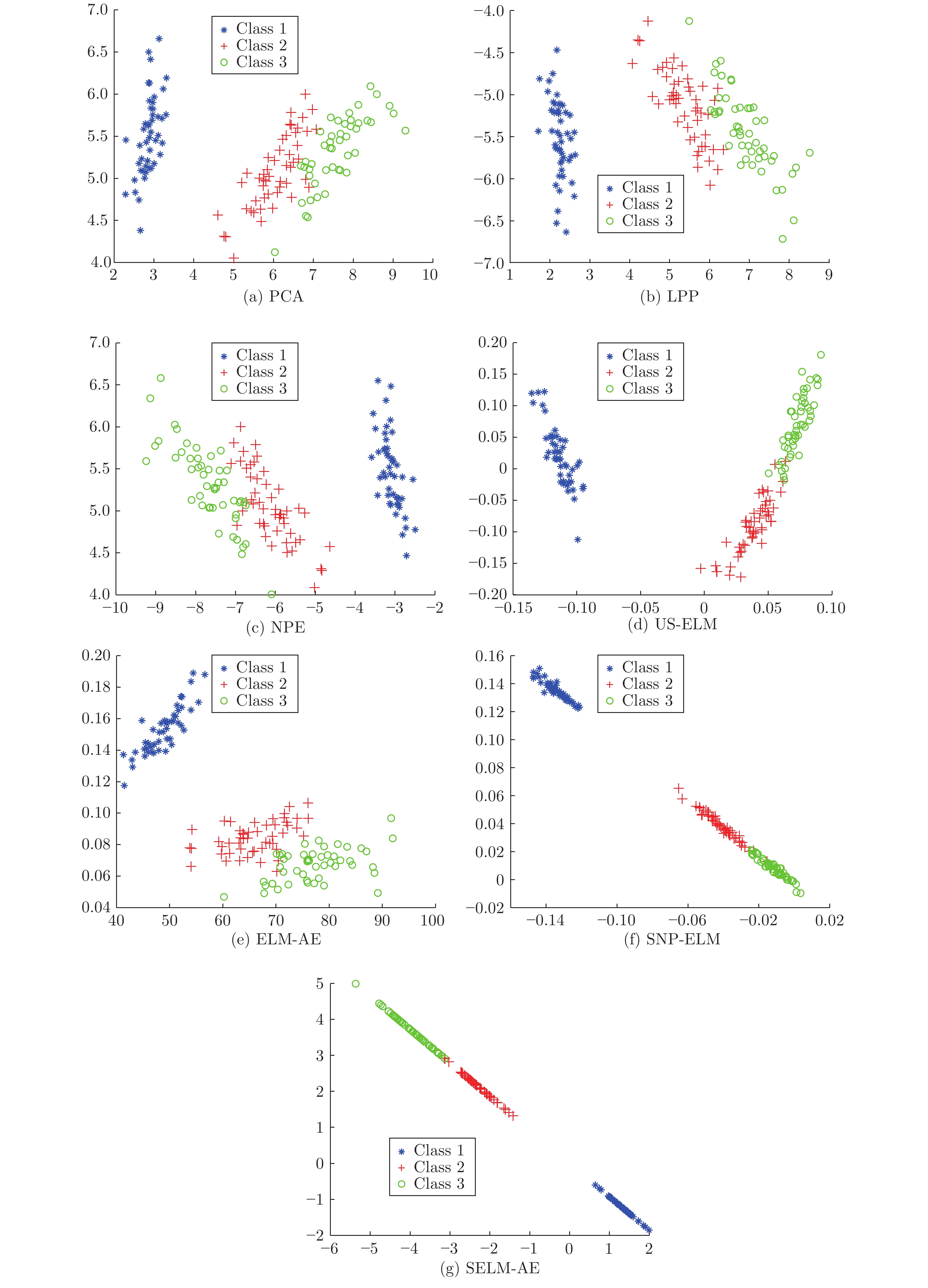
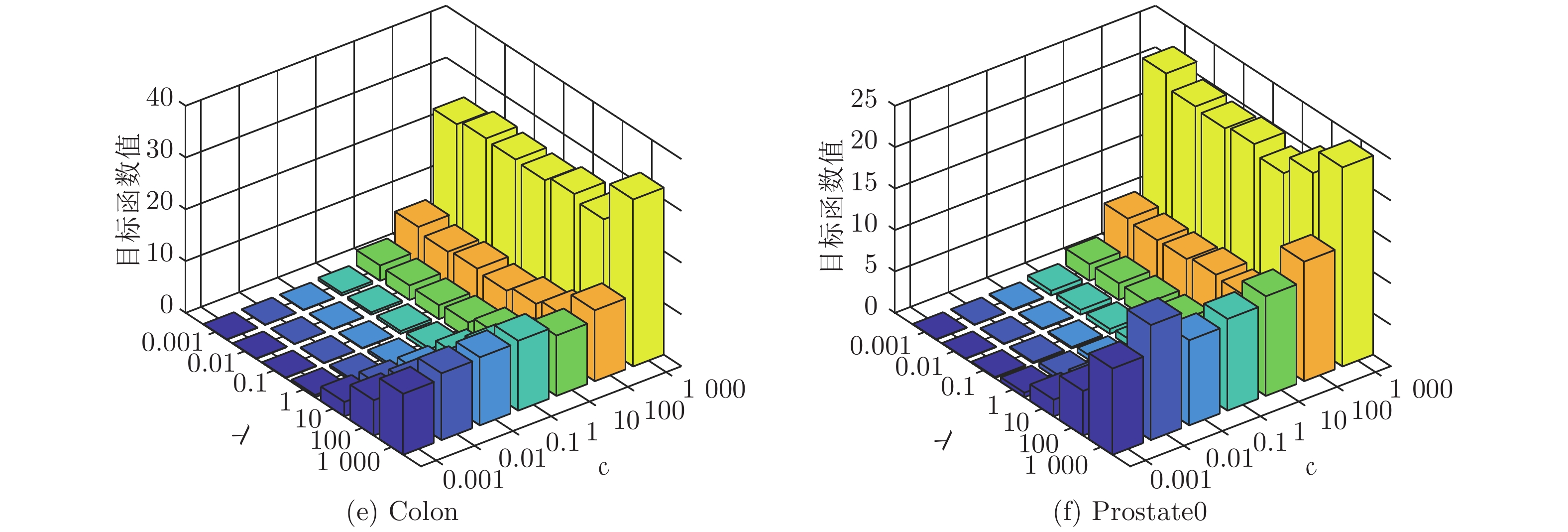
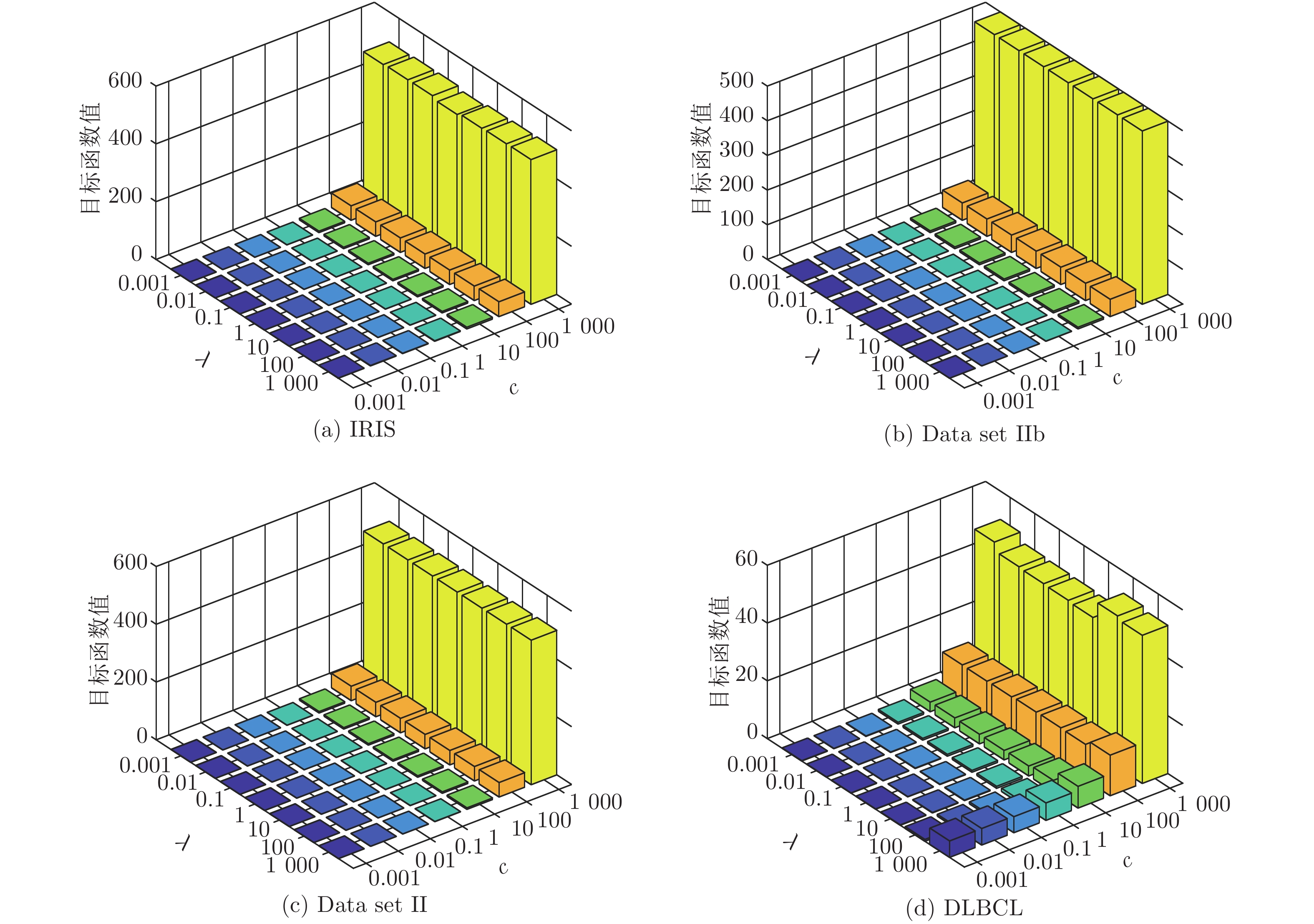
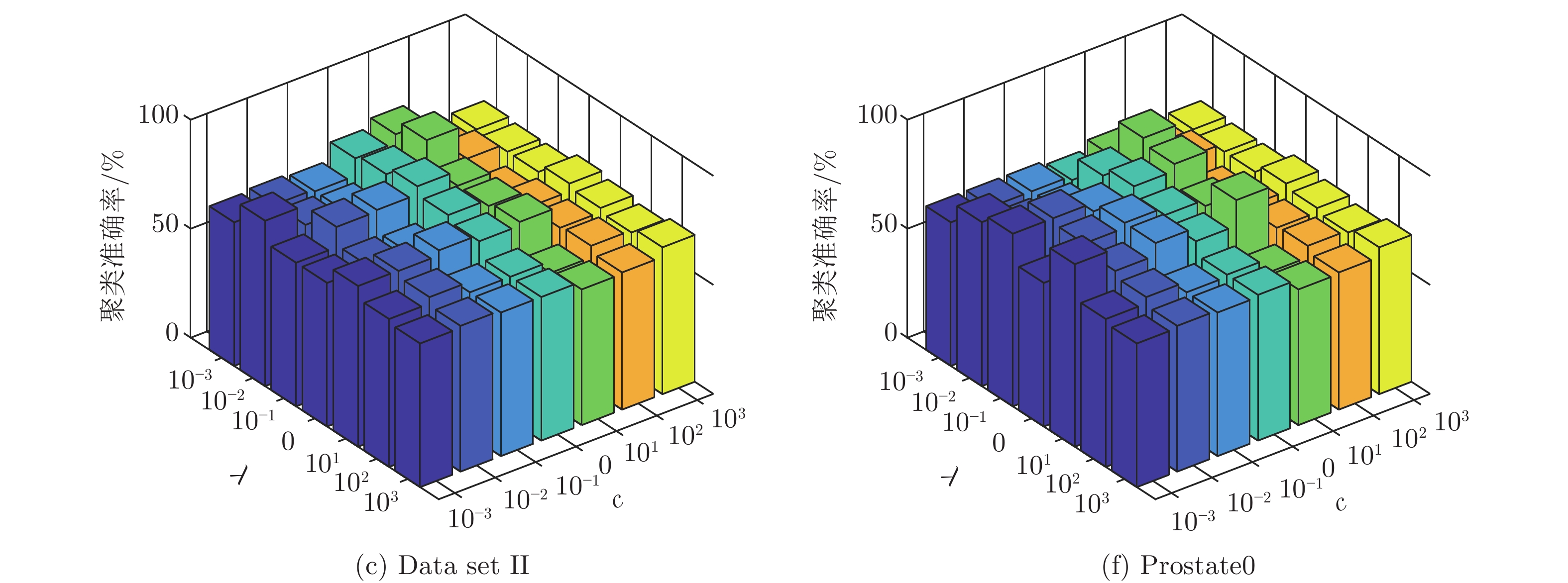
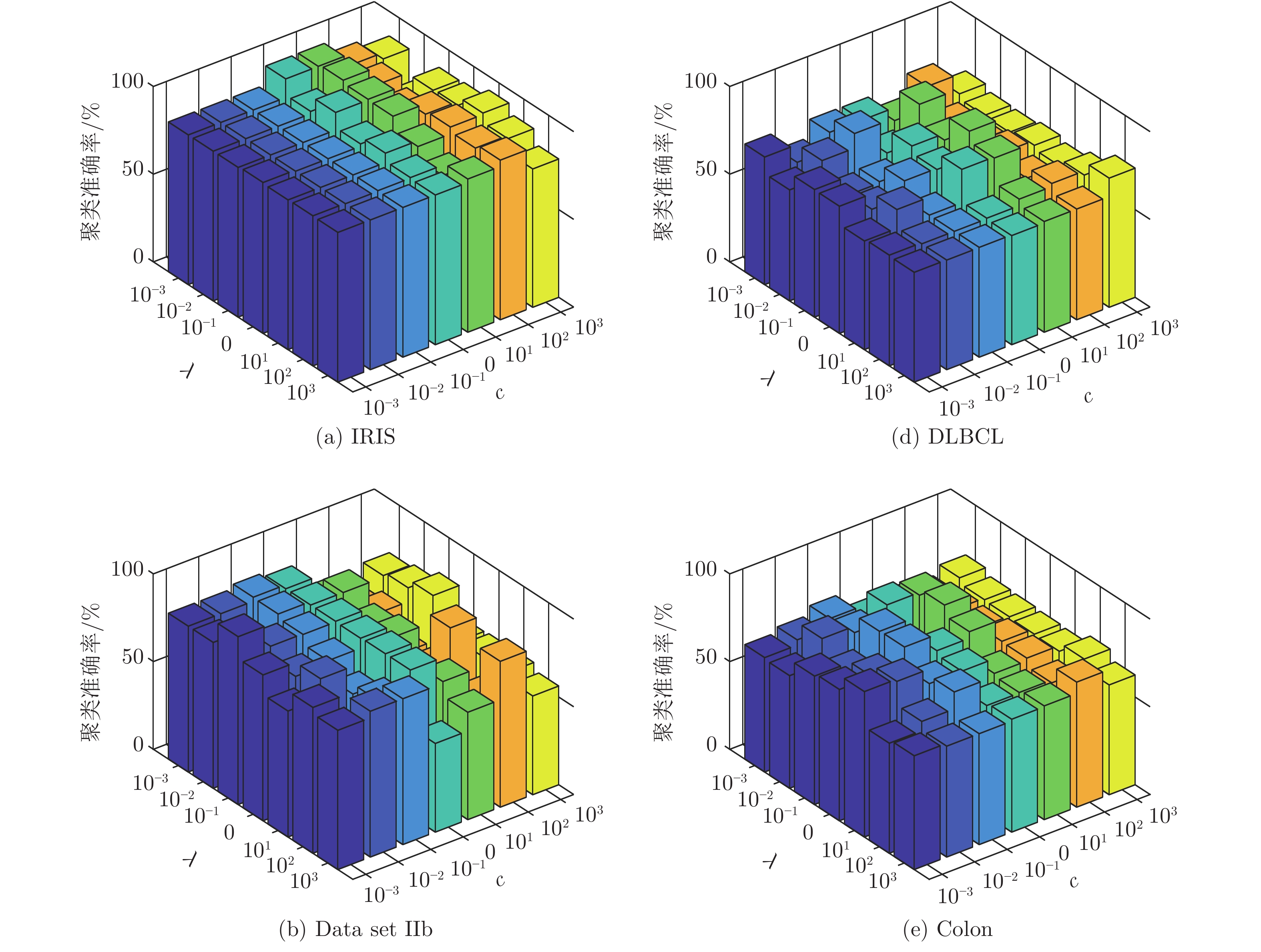
处理高维复杂数据的聚类问题, 通常需先降维后聚类, 但常用的降维方法未考虑数据的同类聚集性和样本间相关关系, 难以保证降维方法与聚类算法相匹配, 从而导致聚类信息损失. 非线性无监督降维方法极限学习机自编码器(Extreme learning machine, ELM-AE)因其学习速度快、泛化性能好, 近年来被广泛应用于降维及去噪. 为使高维数据投影至低维空间后仍能保持原有子空间结构, 提出基于子空间结构保持的多层极限学习机自编码器降维方法(Multilayer extreme learning machine autoencoder based on subspace structure preserving, ML-SELM-AE). 该方法在保持聚类样本多子空间结构的同时, 利用多层极限学习机自编码器捕获样本集的深层特征. 实验结果表明, 该方法在UCI数据、脑电数据和基因表达谱数据上可以有效提高聚类准确率且取得较高的学习效率.
处理高维复杂数据的聚类问题, 通常需先降维后聚类, 但常用的降维方法未考虑数据的同类聚集性和样本间相关关系, 难以保证降维方法与聚类算法相匹配, 从而导致聚类信息损失. 非线性无监督降维方法极限学习机自编码器(Extreme learning machine, ELM-AE)因其学习速度快、泛化性能好, 近年来被广泛应用于降维及去噪. 为使高维数据投影至低维空间后仍能保持原有子空间结构, 提出基于子空间结构保持的多层极限学习机自编码器降维方法(Multilayer extreme learning machine autoencoder based on subspace structure preserving, ML-SELM-AE). 该方法在保持聚类样本多子空间结构的同时, 利用多层极限学习机自编码器捕获样本集的深层特征. 实验结果表明, 该方法在UCI数据、脑电数据和基因表达谱数据上可以有效提高聚类准确率且取得较高的学习效率.

2022, 48(4): 1105-1118.
doi: 10.16383/j.aas.c200543
摘要:
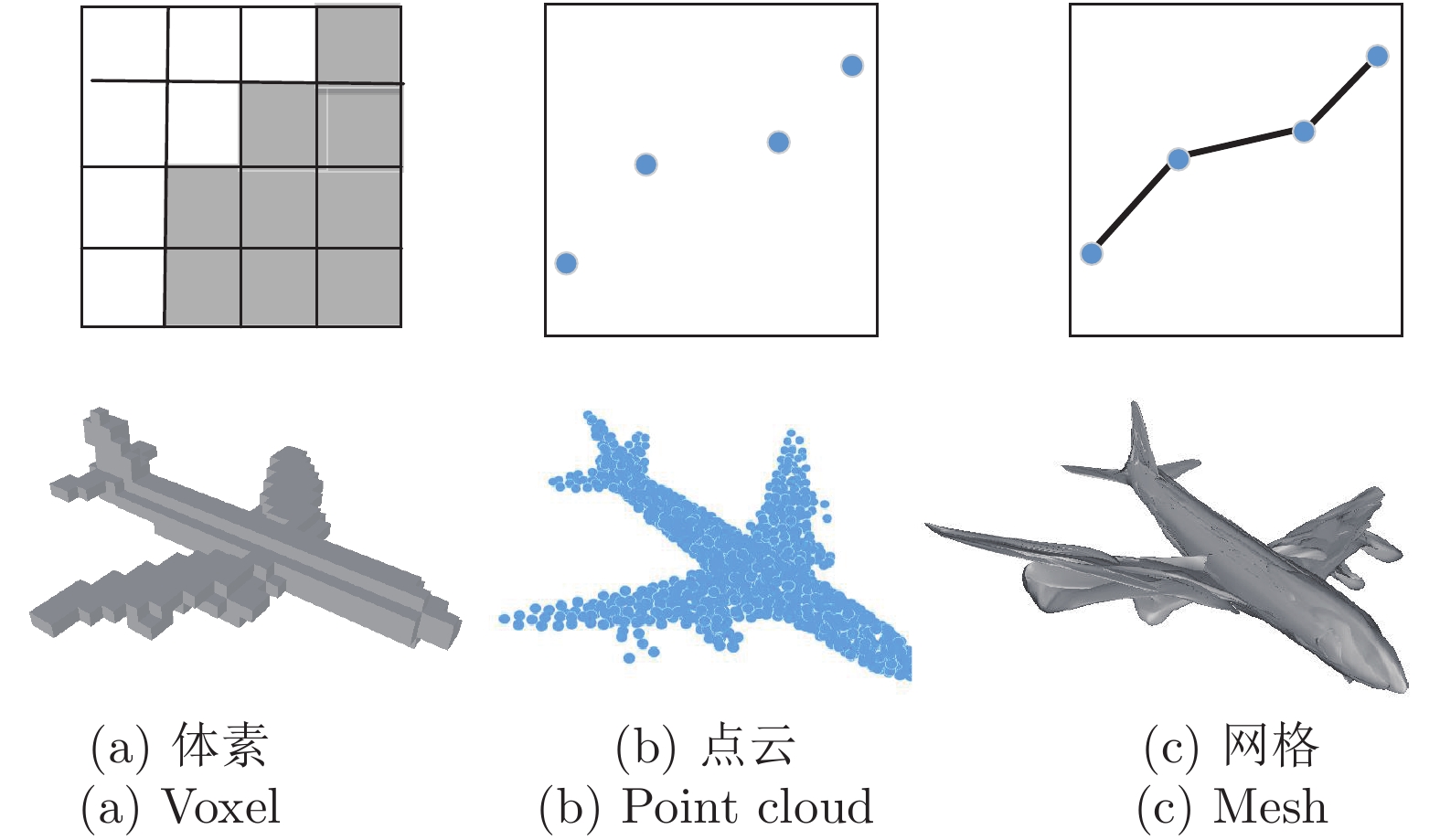
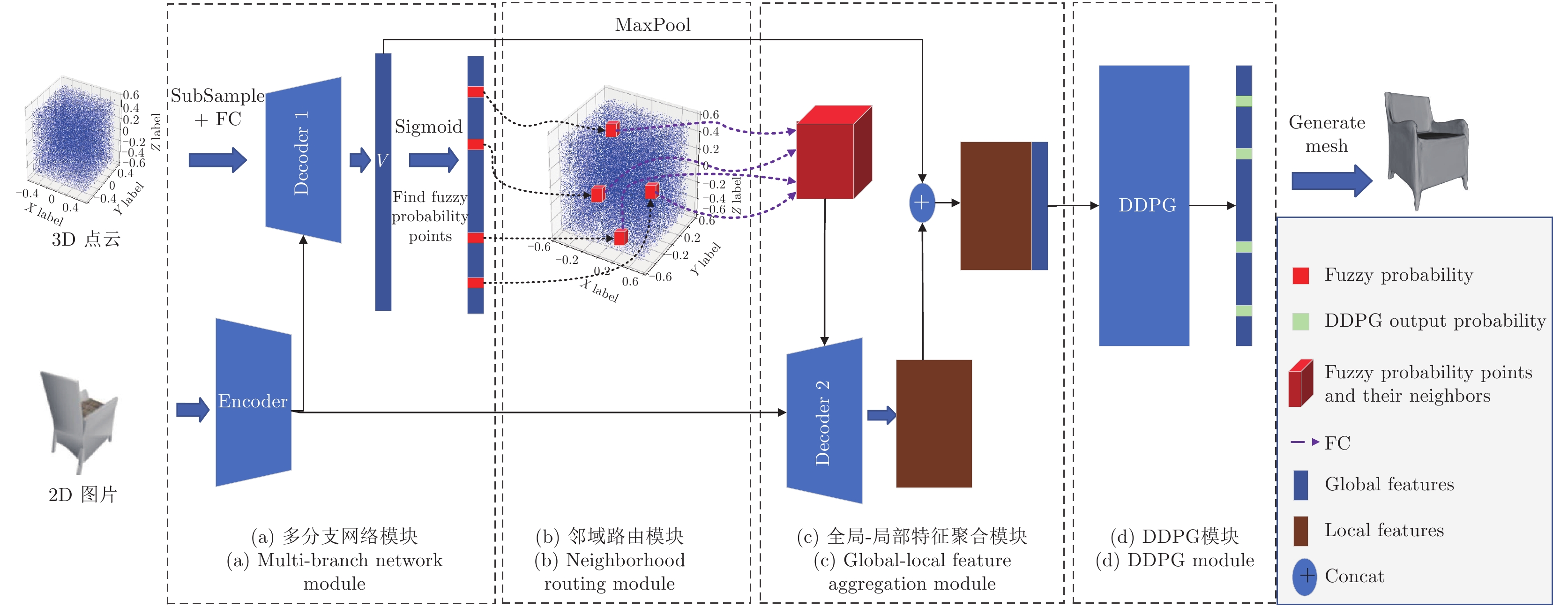
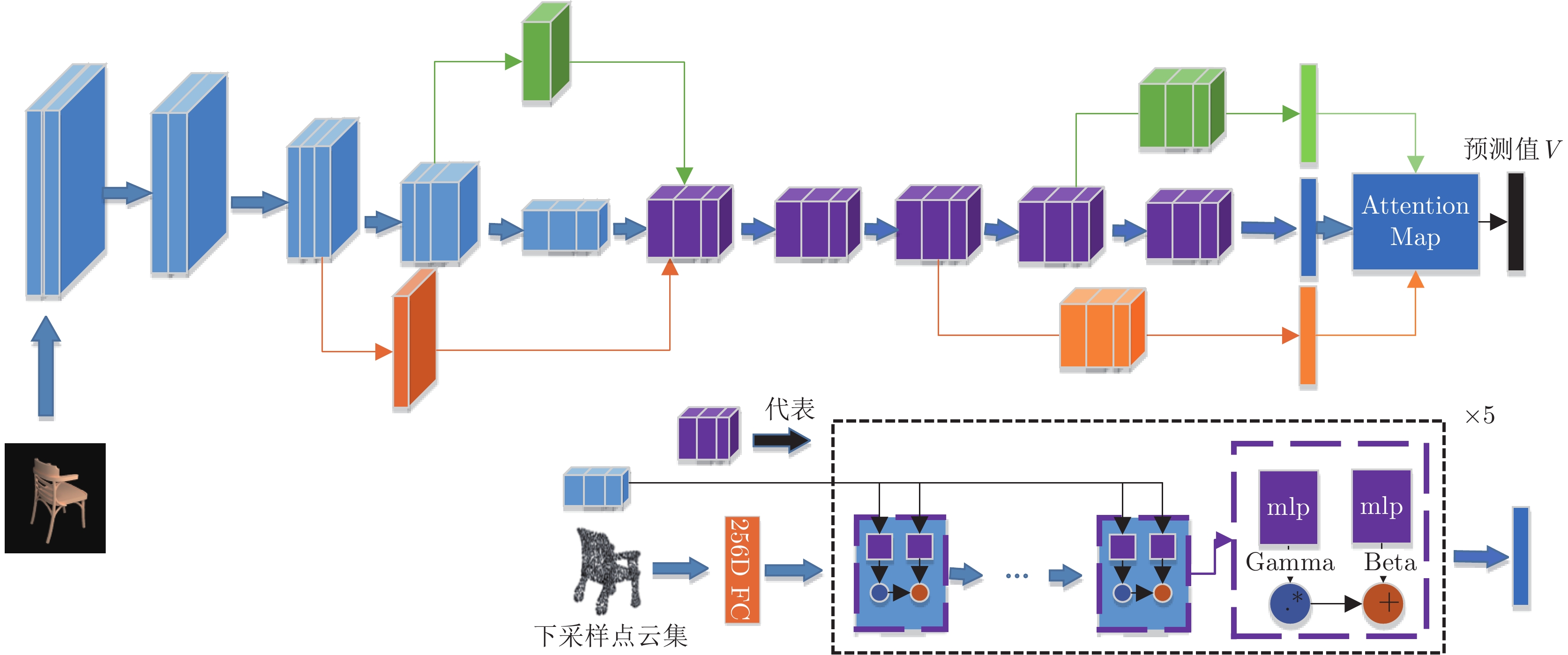
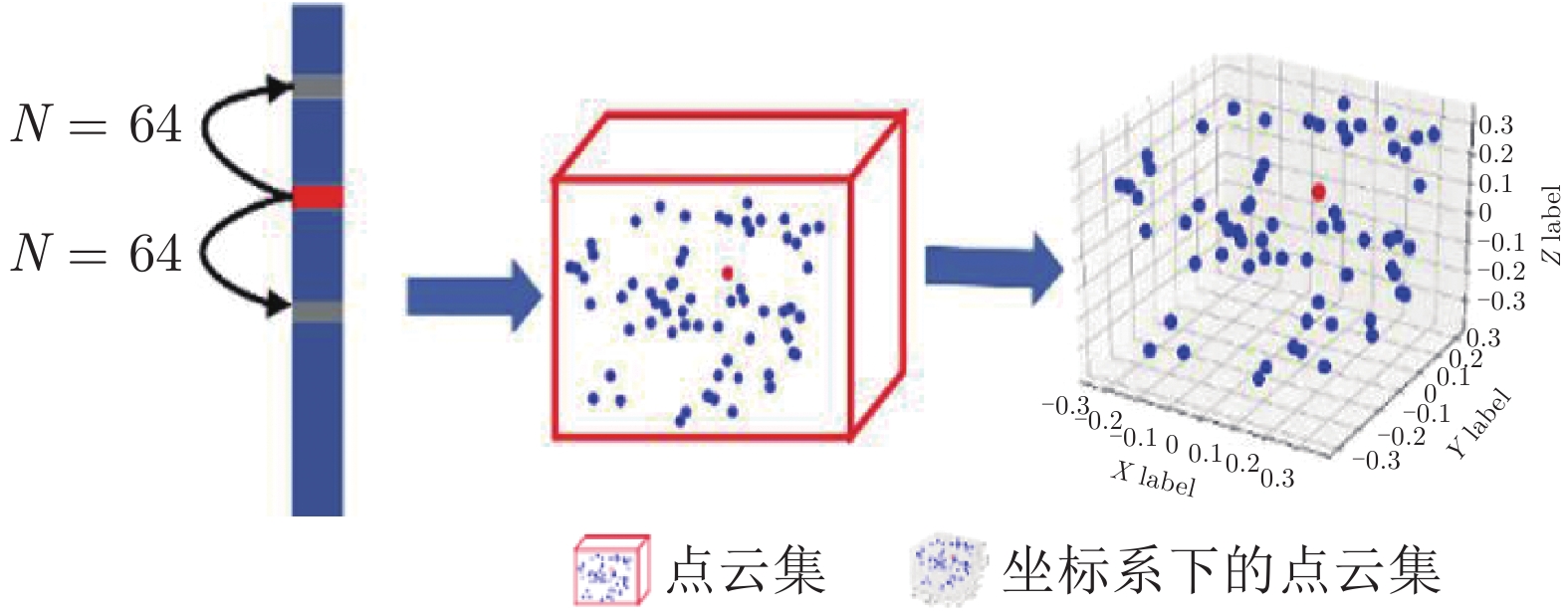
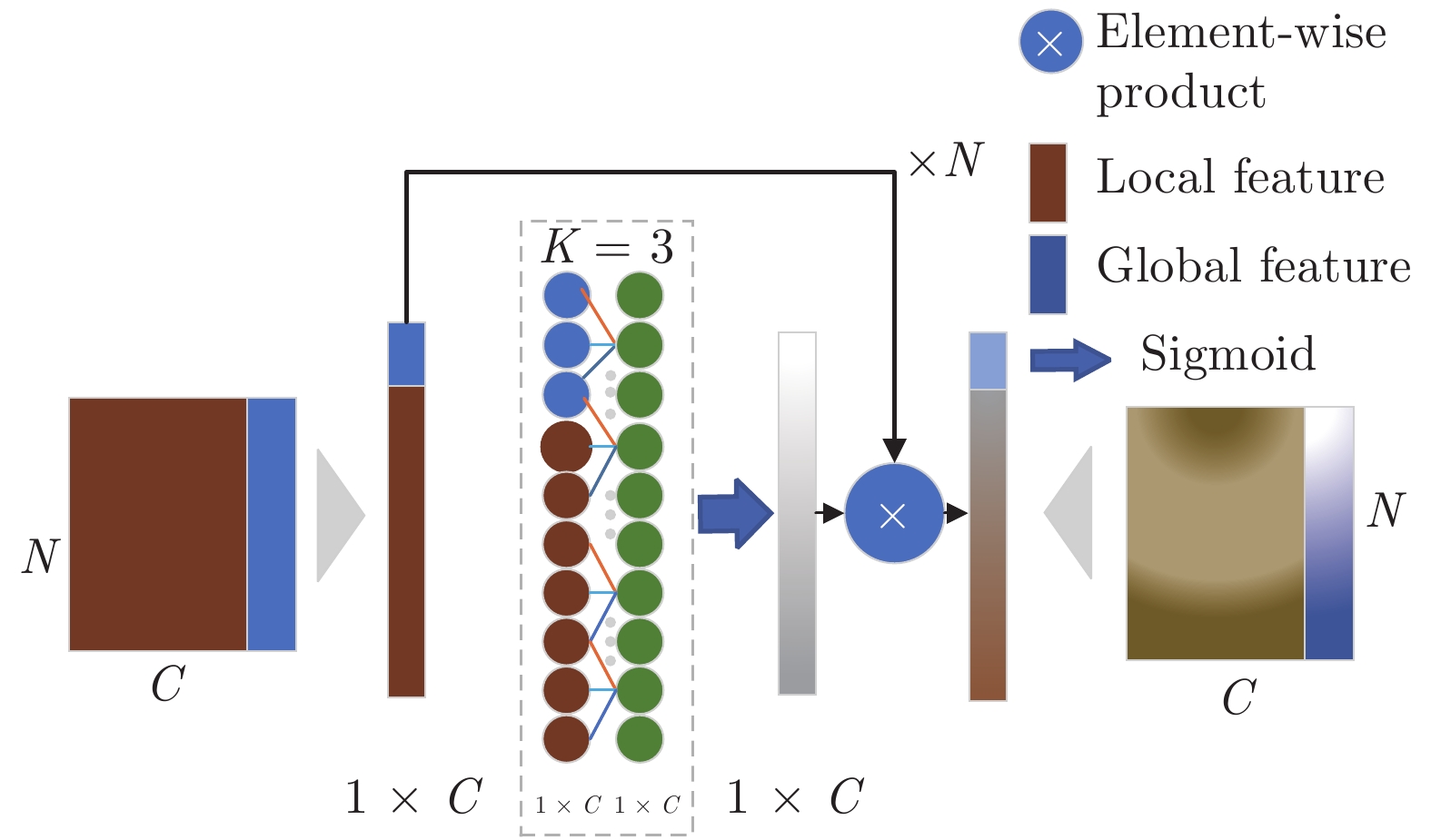
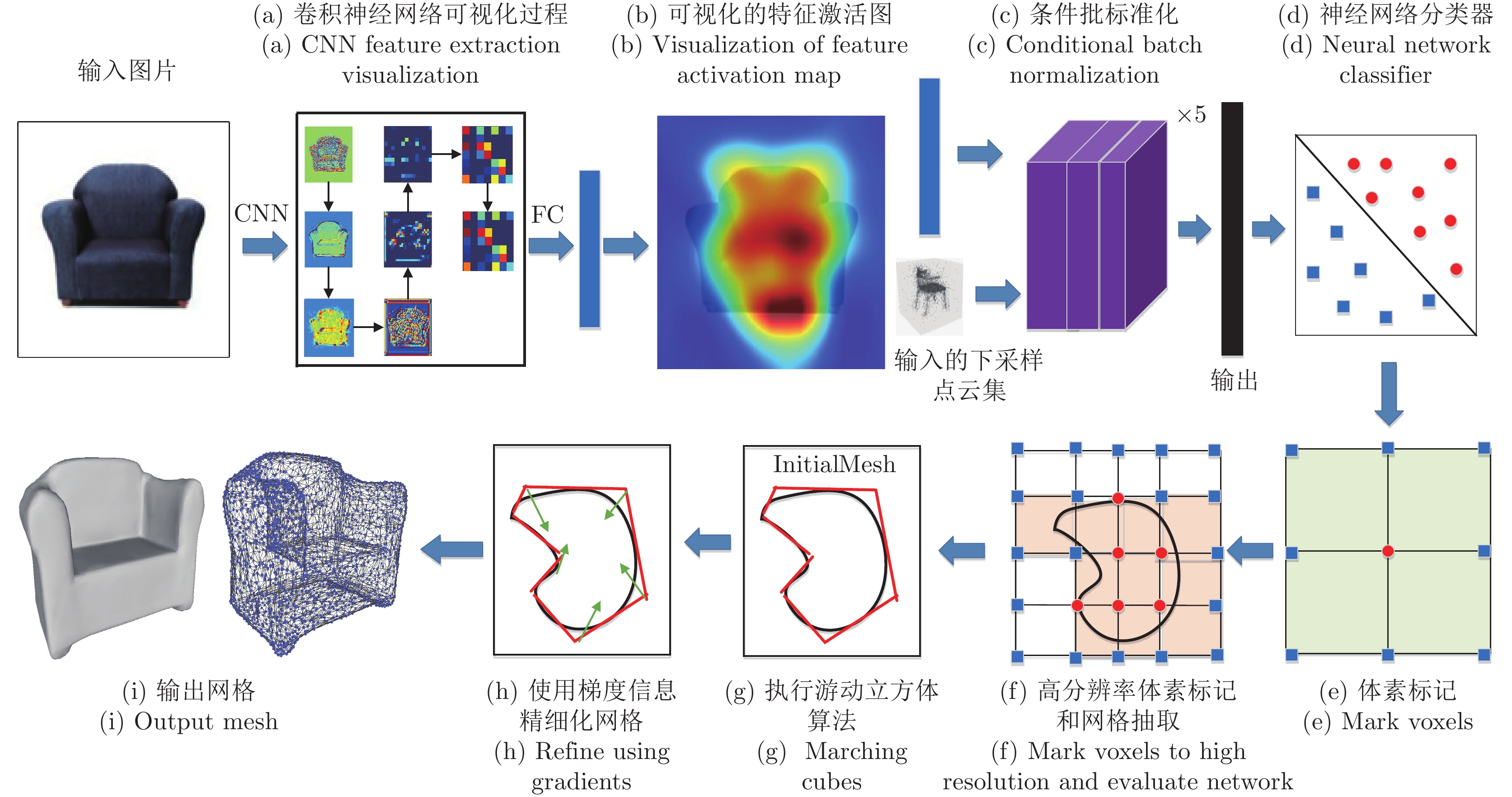
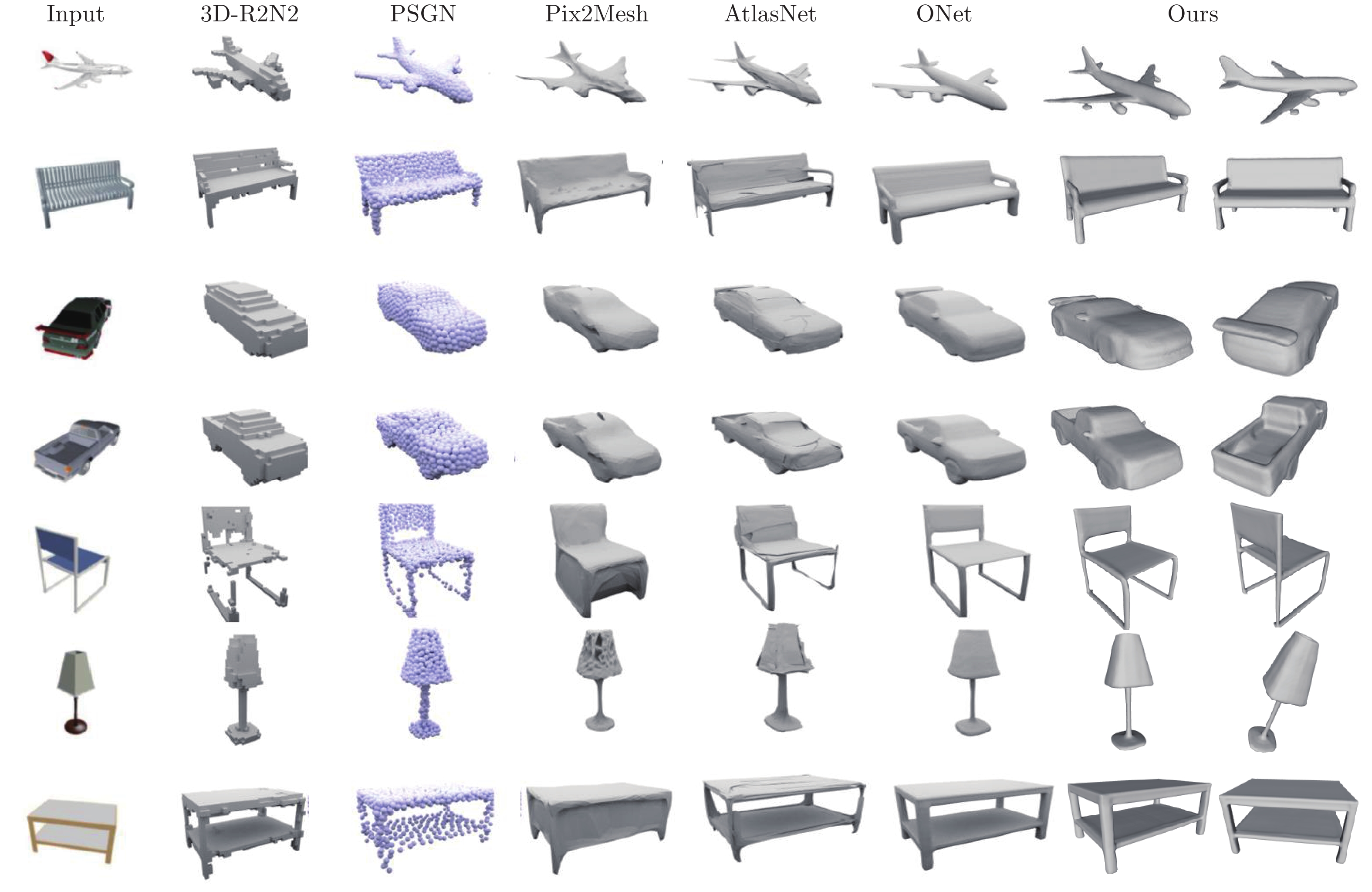
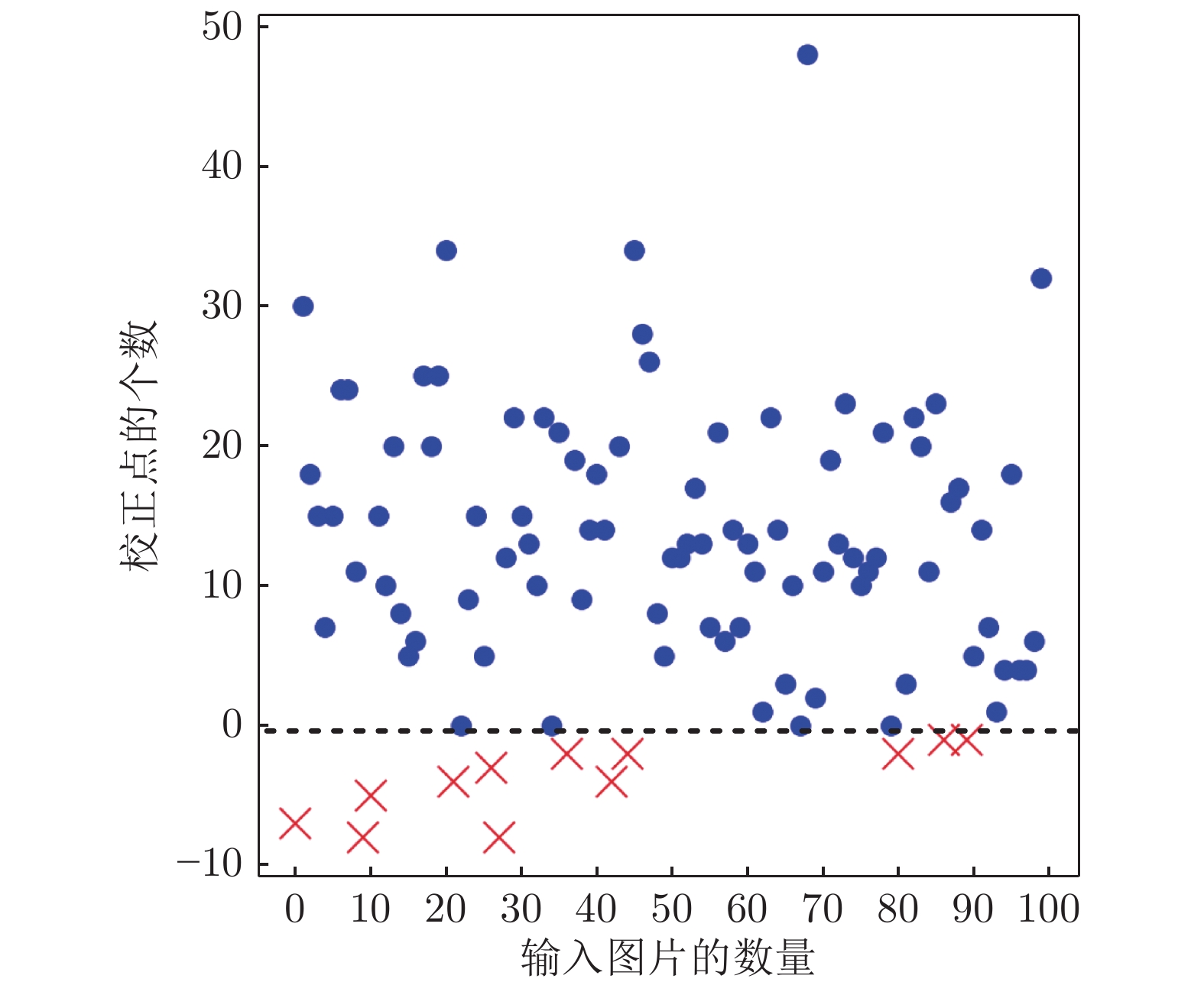
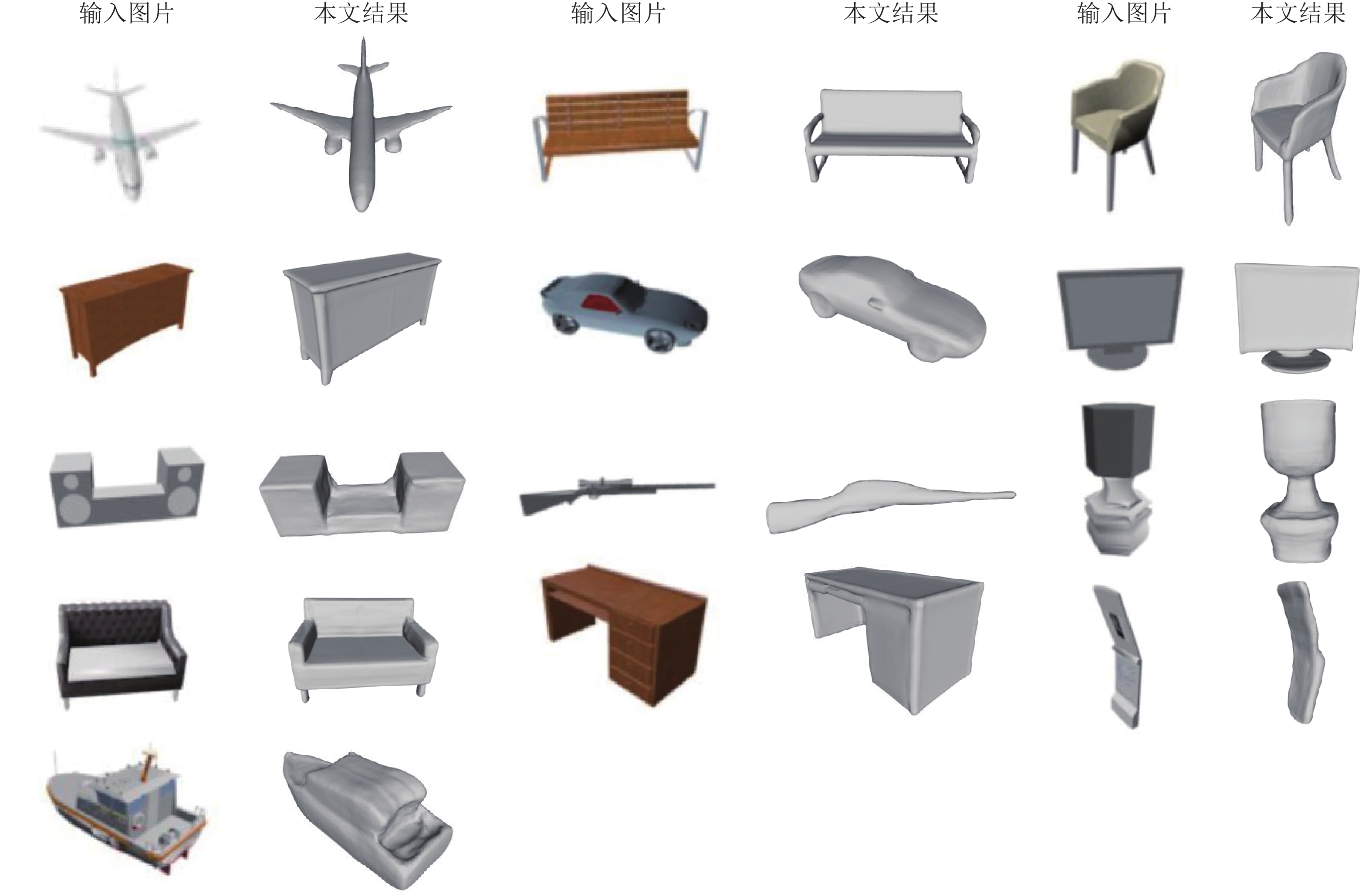
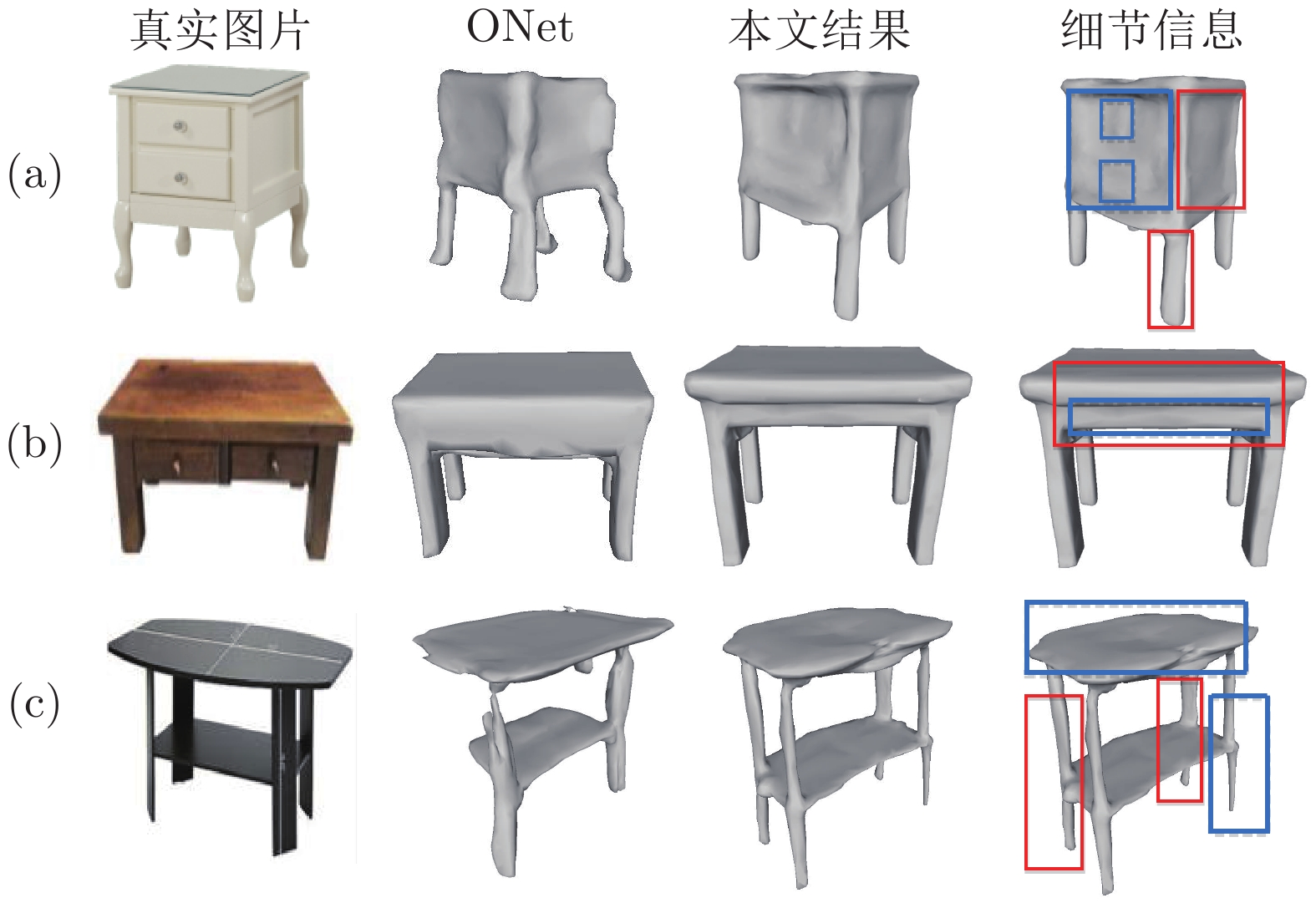
单视图物体三维重建是一个长期存在的具有挑战性的问题. 为了解决具有复杂拓扑结构的物体以及一些高保真度的表面细节信息仍然难以准确进行恢复的问题, 本文提出了一种基于深度强化学习算法深度确定性策略梯度 (Deep deterministic policy gradient, DDPG)的方法对三维重建中模糊概率点进行再推理, 实现了具有高保真和丰富细节的单视图三维重建. 本文的方法是端到端的, 包括以下四个部分: 拟合物体三维形状的动态分支代偿网络的学习过程, 聚合模糊概率点周围点的邻域路由机制, 注意力机制引导的信息聚合和基于深度强化学习算法的模糊概率调整. 本文在公开的大规模三维形状数据集上进行了大量的实验证明了本文方法的正确性和有效性. 本文提出的方法结合了强化学习和深度学习, 聚合了模糊概率点周围的局部信息和图像全局信息, 从而有效地提升了模型对复杂拓扑结构和高保真度的细节信息的重建能力.
单视图物体三维重建是一个长期存在的具有挑战性的问题. 为了解决具有复杂拓扑结构的物体以及一些高保真度的表面细节信息仍然难以准确进行恢复的问题, 本文提出了一种基于深度强化学习算法深度确定性策略梯度 (Deep deterministic policy gradient, DDPG)的方法对三维重建中模糊概率点进行再推理, 实现了具有高保真和丰富细节的单视图三维重建. 本文的方法是端到端的, 包括以下四个部分: 拟合物体三维形状的动态分支代偿网络的学习过程, 聚合模糊概率点周围点的邻域路由机制, 注意力机制引导的信息聚合和基于深度强化学习算法的模糊概率调整. 本文在公开的大规模三维形状数据集上进行了大量的实验证明了本文方法的正确性和有效性. 本文提出的方法结合了强化学习和深度学习, 聚合了模糊概率点周围的局部信息和图像全局信息, 从而有效地提升了模型对复杂拓扑结构和高保真度的细节信息的重建能力.



2022, 48(4): 1119-1128.
doi: 10.16383/j.aas.c200969
摘要:
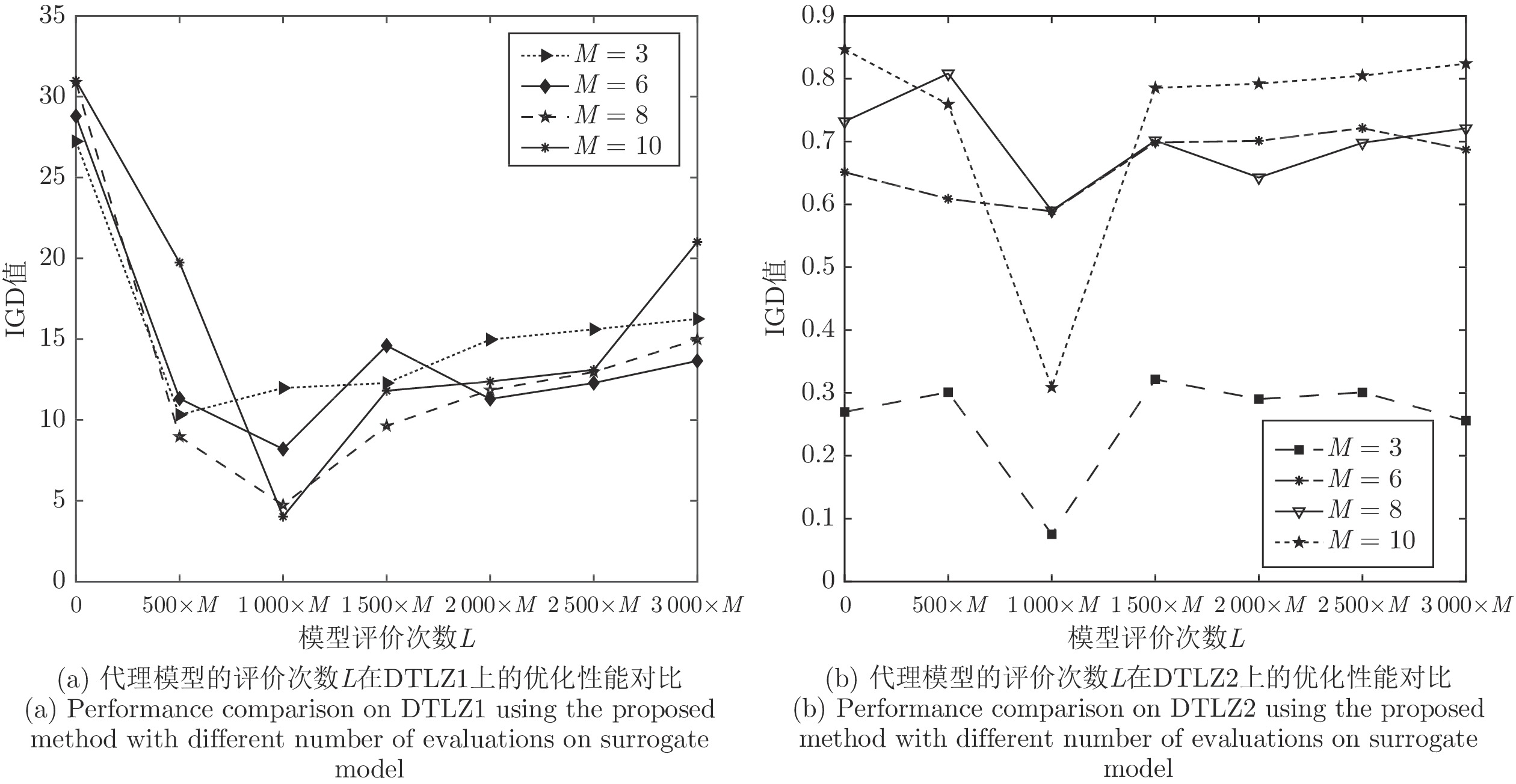
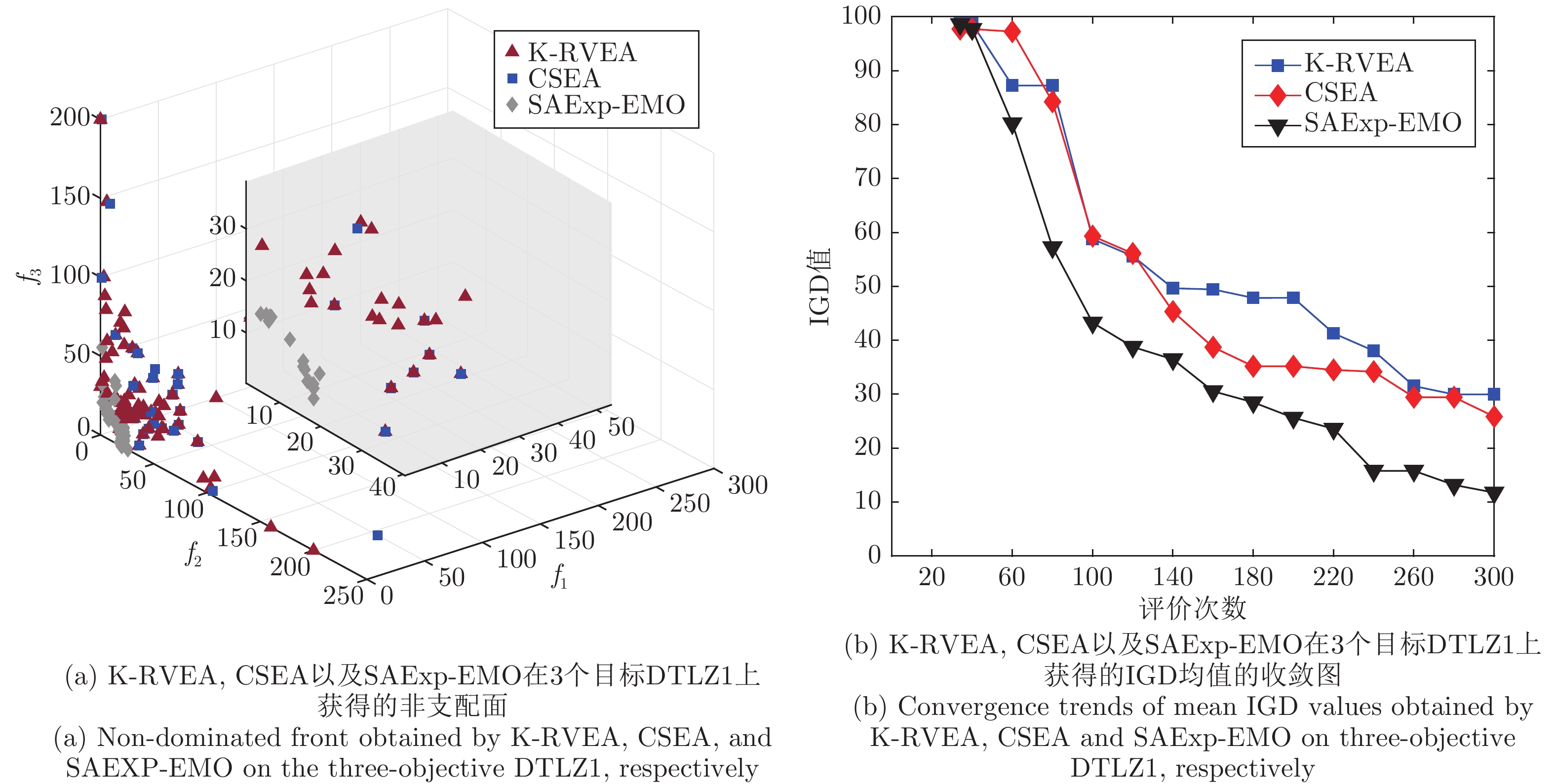
代理模型能够辅助进化算法在计算资源有限的情况下加快找到问题的最优解集, 因此建立高效的代理模型辅助多目标进化搜索逐渐受到了重视. 然而随着目标数量的增加, 对每个目标分别建立高斯过程模型时个体整体估值的不确定度会随之增加. 因此通过对模型最优解集的搜索探索原问题潜在的非支配解集, 并基于个体的收敛性, 种群的多样性和估值的不确定度, 提出了一种新的期望提高计算方法, 用于辅助从潜在的非支配解集中选择使用真实目标函数计算的个体, 从而更新代理模型, 能够在有限的计算资源下更有效地辅助优化算法找到好的非支配解集. 在7个DTLZ 基准测试问题上的实验对比结果表明, 该算法在求解计算费时高维多目标优化问题上是有效的, 且具有较强的竞争力.
代理模型能够辅助进化算法在计算资源有限的情况下加快找到问题的最优解集, 因此建立高效的代理模型辅助多目标进化搜索逐渐受到了重视. 然而随着目标数量的增加, 对每个目标分别建立高斯过程模型时个体整体估值的不确定度会随之增加. 因此通过对模型最优解集的搜索探索原问题潜在的非支配解集, 并基于个体的收敛性, 种群的多样性和估值的不确定度, 提出了一种新的期望提高计算方法, 用于辅助从潜在的非支配解集中选择使用真实目标函数计算的个体, 从而更新代理模型, 能够在有限的计算资源下更有效地辅助优化算法找到好的非支配解集. 在7个DTLZ 基准测试问题上的实验对比结果表明, 该算法在求解计算费时高维多目标优化问题上是有效的, 且具有较强的竞争力.
2022, 48(4): 1129-1136.
doi: 10.16383/j.aas.c200130
摘要:
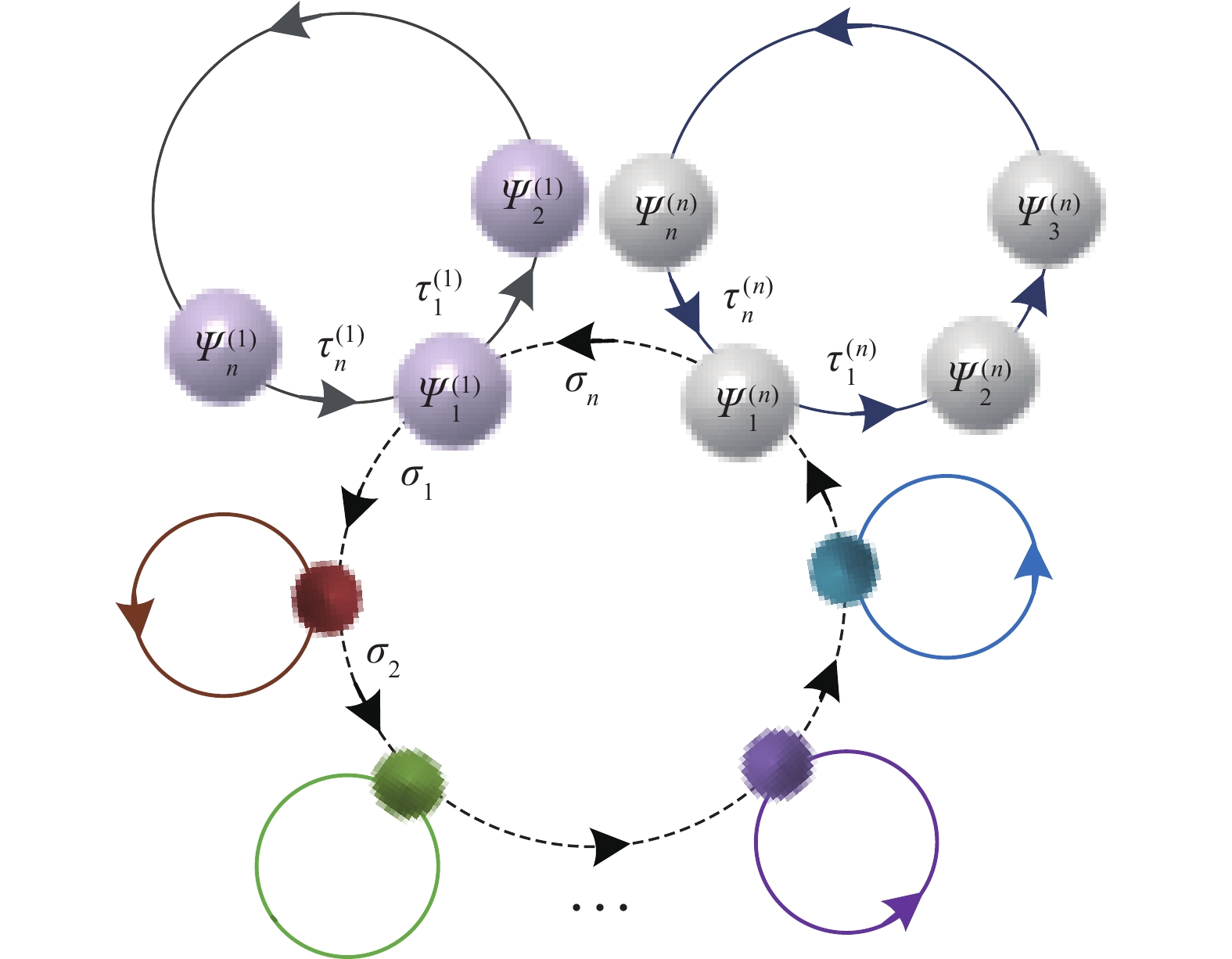
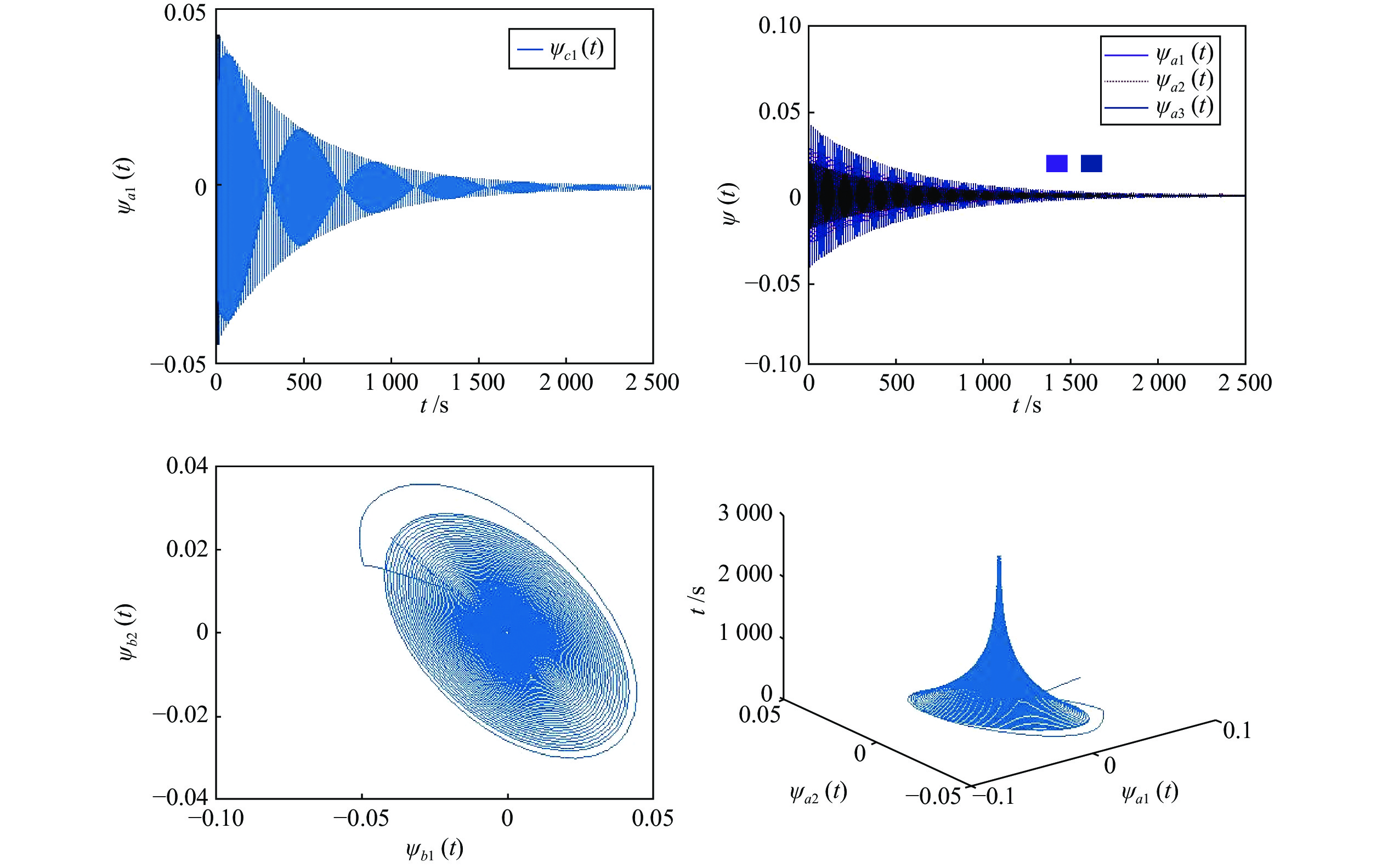
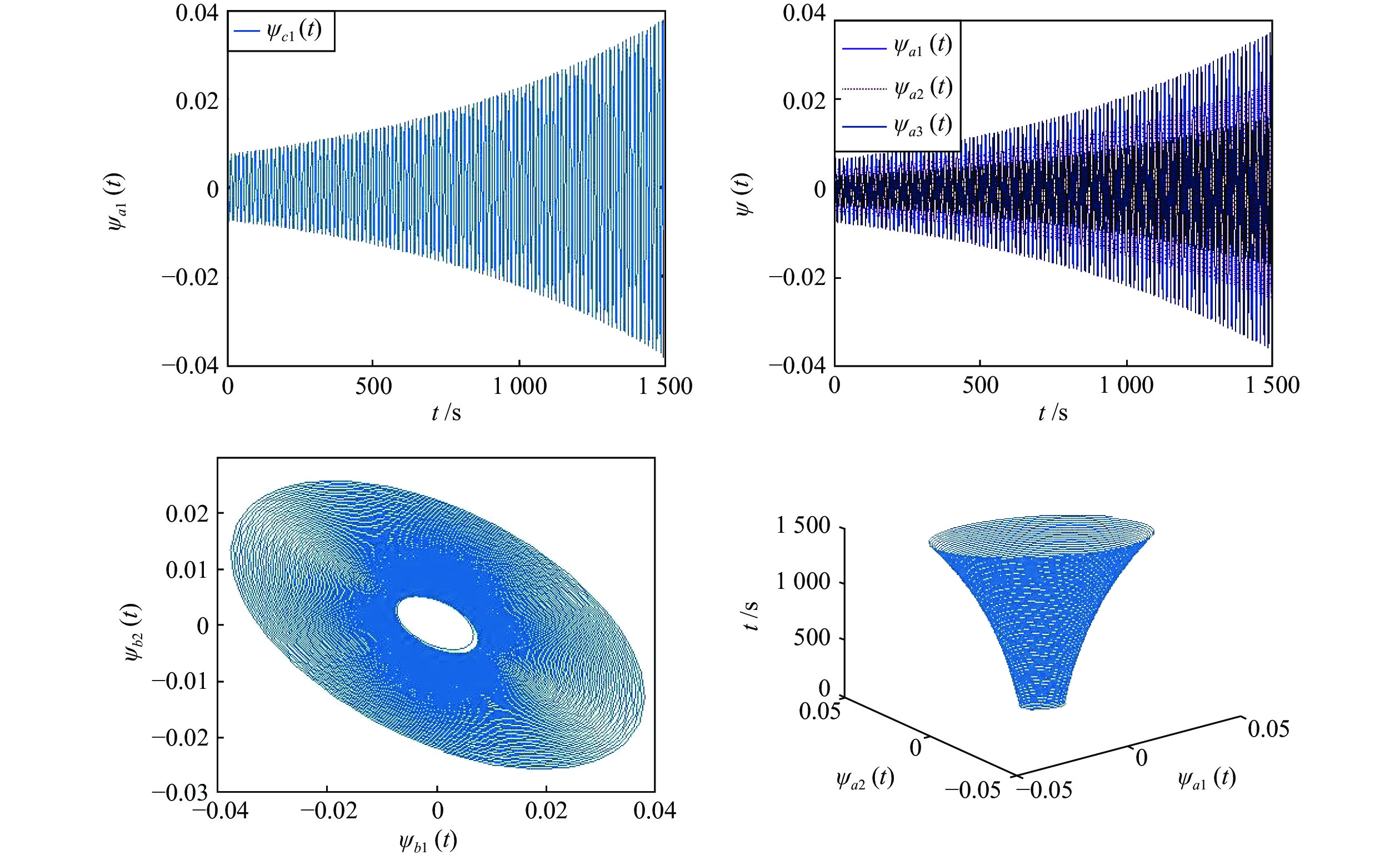
目前绝大多数神经网络分岔动力学局限于结构简单、低维少节点模型, 这与真实的大规模神经网络系统相去甚远. 因此, 研究大量神经元耦合的高维神经网络模型更具实际应用价值. 环状及辐射状结构在神经网络中普遍存在, 提出了一类大规模超环时滞神经网络模型, 结构包含一个大环和任意多个小环, 并且每个环上拥有任意多个神经元. 运用特征值法和分岔理论, 选取时滞为分岔参数, 给出了该超环神经网络模型的稳定性条件和Hopf分岔判据. 数值仿真结果, 验证该理论结果的正确性.
目前绝大多数神经网络分岔动力学局限于结构简单、低维少节点模型, 这与真实的大规模神经网络系统相去甚远. 因此, 研究大量神经元耦合的高维神经网络模型更具实际应用价值. 环状及辐射状结构在神经网络中普遍存在, 提出了一类大规模超环时滞神经网络模型, 结构包含一个大环和任意多个小环, 并且每个环上拥有任意多个神经元. 运用特征值法和分岔理论, 选取时滞为分岔参数, 给出了该超环神经网络模型的稳定性条件和Hopf分岔判据. 数值仿真结果, 验证该理论结果的正确性.
2022, 48(4): 1137-1152.
doi: 10.16383/j.aas.c200277
摘要:
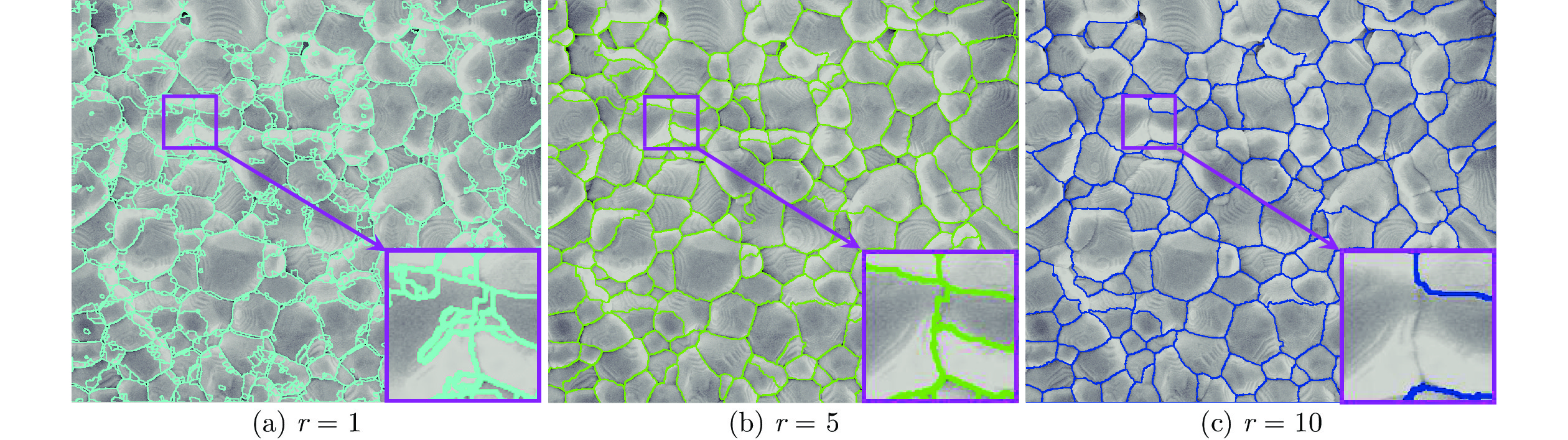
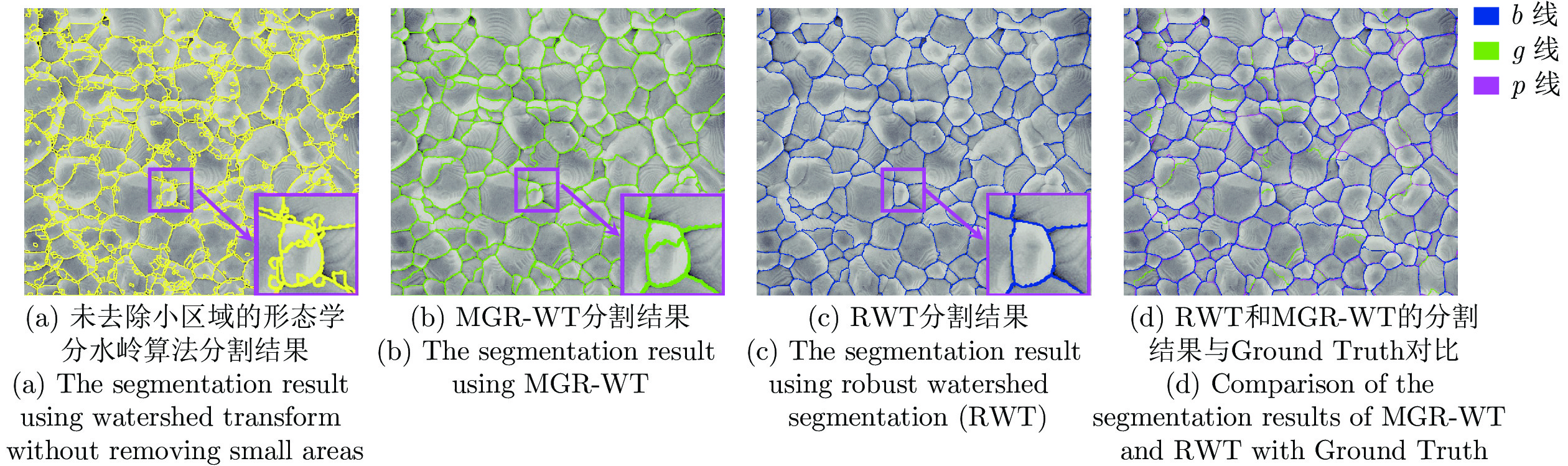
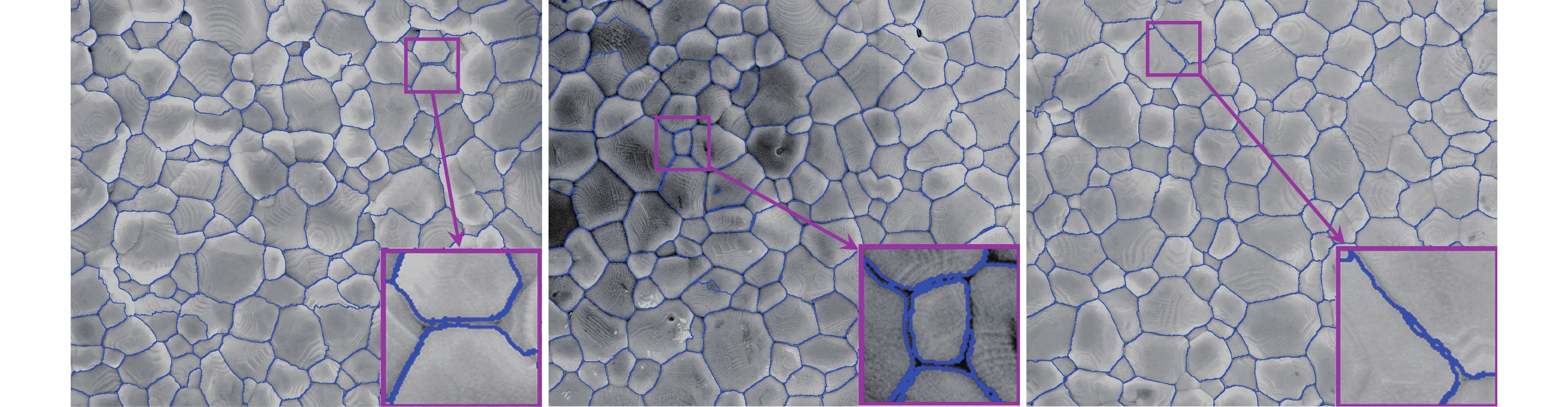
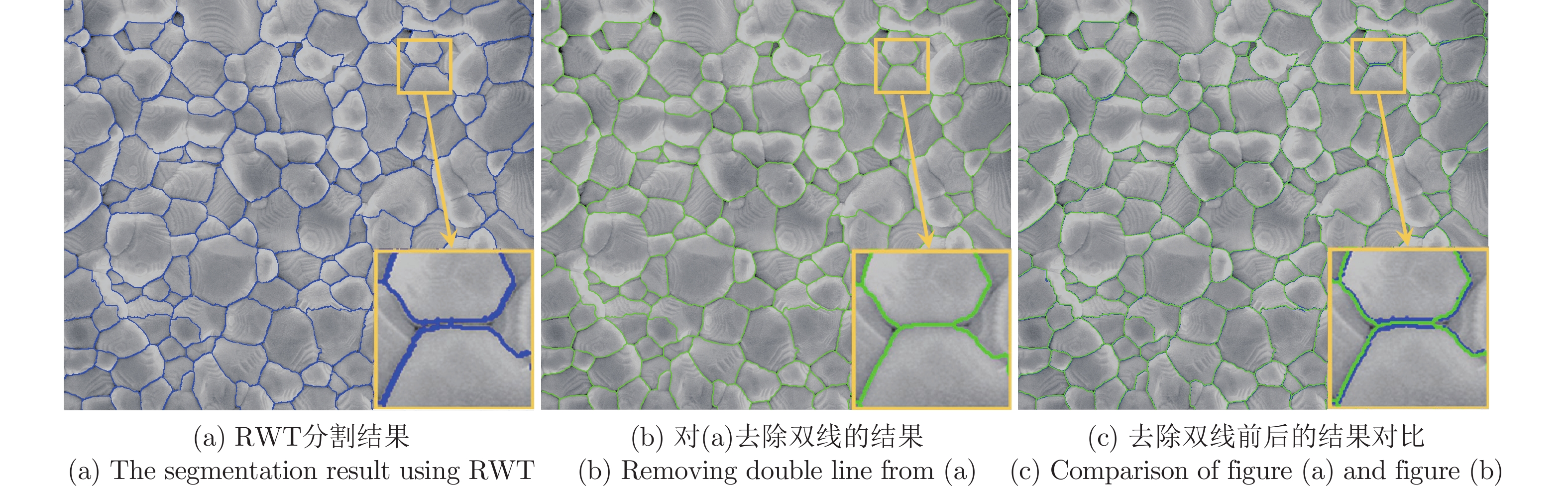
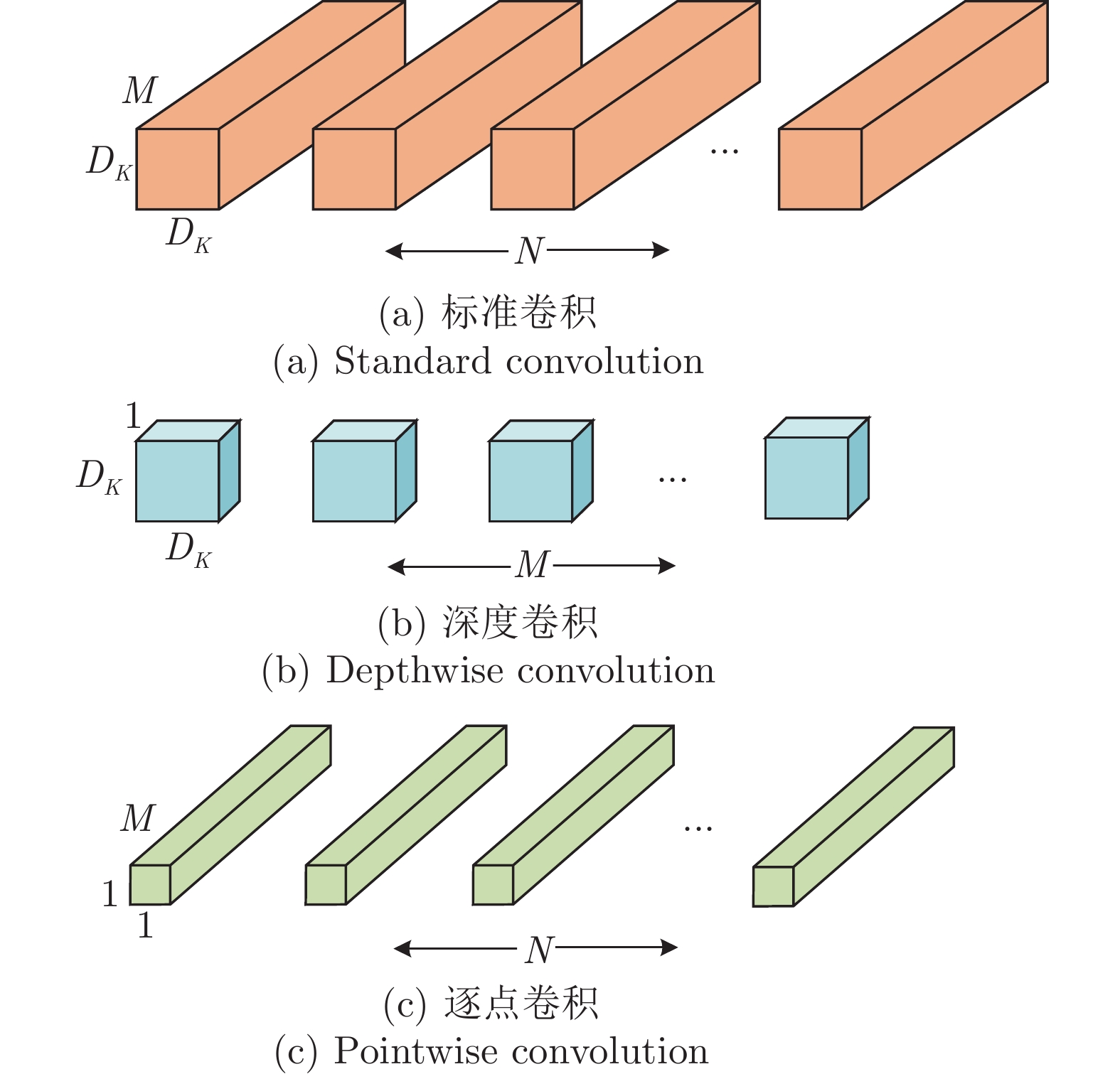
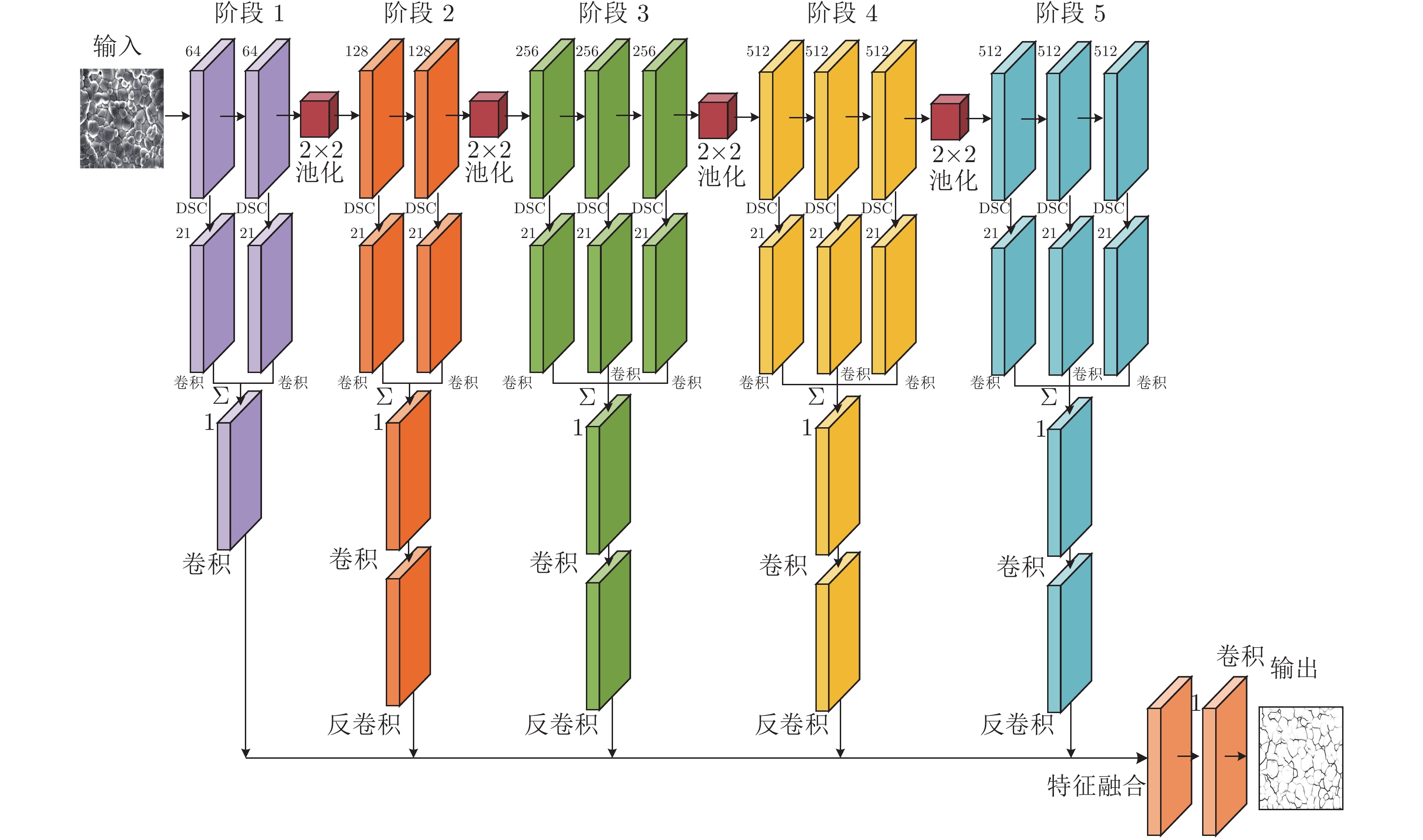
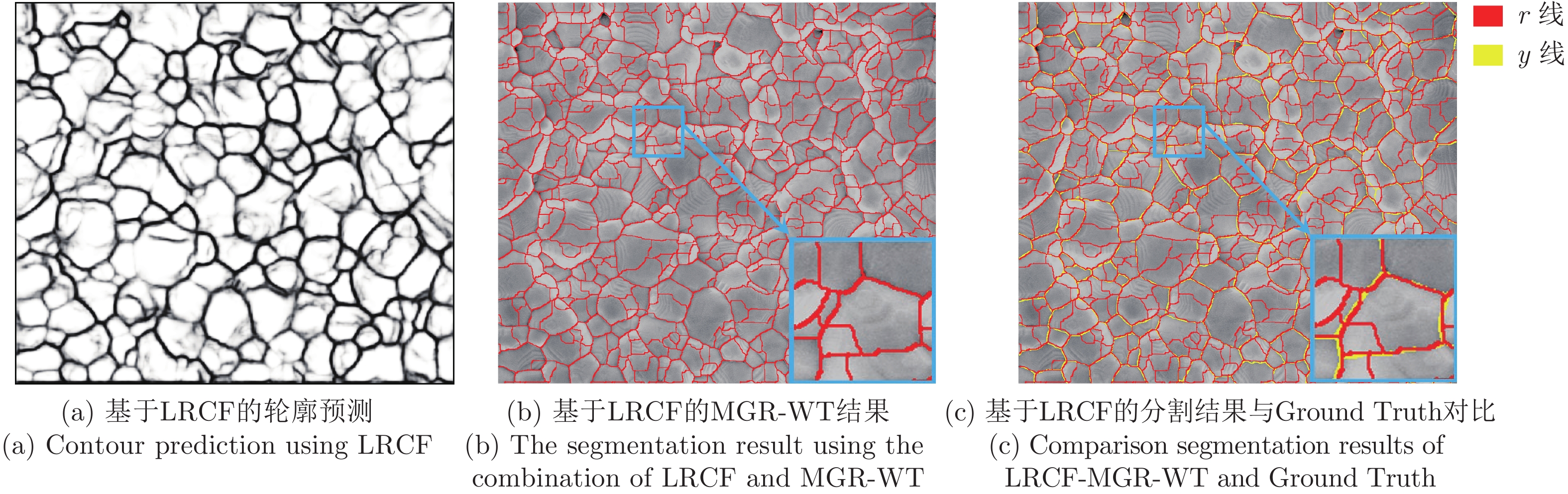
研究陶瓷晶粒尺寸分布对估计陶瓷样品的物理属性具有重要意义, 当前主要依赖人工方法测量晶粒尺寸, 由于晶粒形状不规则且大小不一, 因此人工方法测量效率低、误差大. 针对该问题, 提出一种数据与模型联合驱动的陶瓷材料晶粒分割算法. 该算法首先通过图像预处理解决材料表面反光导致的灰度不均匀问题; 其次利用本文提出的鲁棒分水岭变换实现图像中晶粒的预分割, 解决传统分水岭算法存在的过分割以及分割区域个数与轮廓精度难以平衡的问题; 最后提出轻量级富卷积特征网络输出晶粒轮廓, 并利用该轮廓对预分割结果进行优化. 与主流图像分割算法相比, 该算法一方面利用鲁棒分水岭变换实现了更为准确的晶粒区域定位, 另一方面利用图像的低层与高层特征融合获取了更为精准的晶粒轮廓. 实验结果表明, 该算法不仅能够实现陶瓷材料晶粒尺寸的精准计算, 而且具有较高的计算效率, 为分析陶瓷材料物理属性提供了客观准确的数据.
研究陶瓷晶粒尺寸分布对估计陶瓷样品的物理属性具有重要意义, 当前主要依赖人工方法测量晶粒尺寸, 由于晶粒形状不规则且大小不一, 因此人工方法测量效率低、误差大. 针对该问题, 提出一种数据与模型联合驱动的陶瓷材料晶粒分割算法. 该算法首先通过图像预处理解决材料表面反光导致的灰度不均匀问题; 其次利用本文提出的鲁棒分水岭变换实现图像中晶粒的预分割, 解决传统分水岭算法存在的过分割以及分割区域个数与轮廓精度难以平衡的问题; 最后提出轻量级富卷积特征网络输出晶粒轮廓, 并利用该轮廓对预分割结果进行优化. 与主流图像分割算法相比, 该算法一方面利用鲁棒分水岭变换实现了更为准确的晶粒区域定位, 另一方面利用图像的低层与高层特征融合获取了更为精准的晶粒轮廓. 实验结果表明, 该算法不仅能够实现陶瓷材料晶粒尺寸的精准计算, 而且具有较高的计算效率, 为分析陶瓷材料物理属性提供了客观准确的数据.