2022年 第48卷 第12期
2022, 48(12): 2863-2885.
doi: 10.16383/j.aas.c211108
摘要:
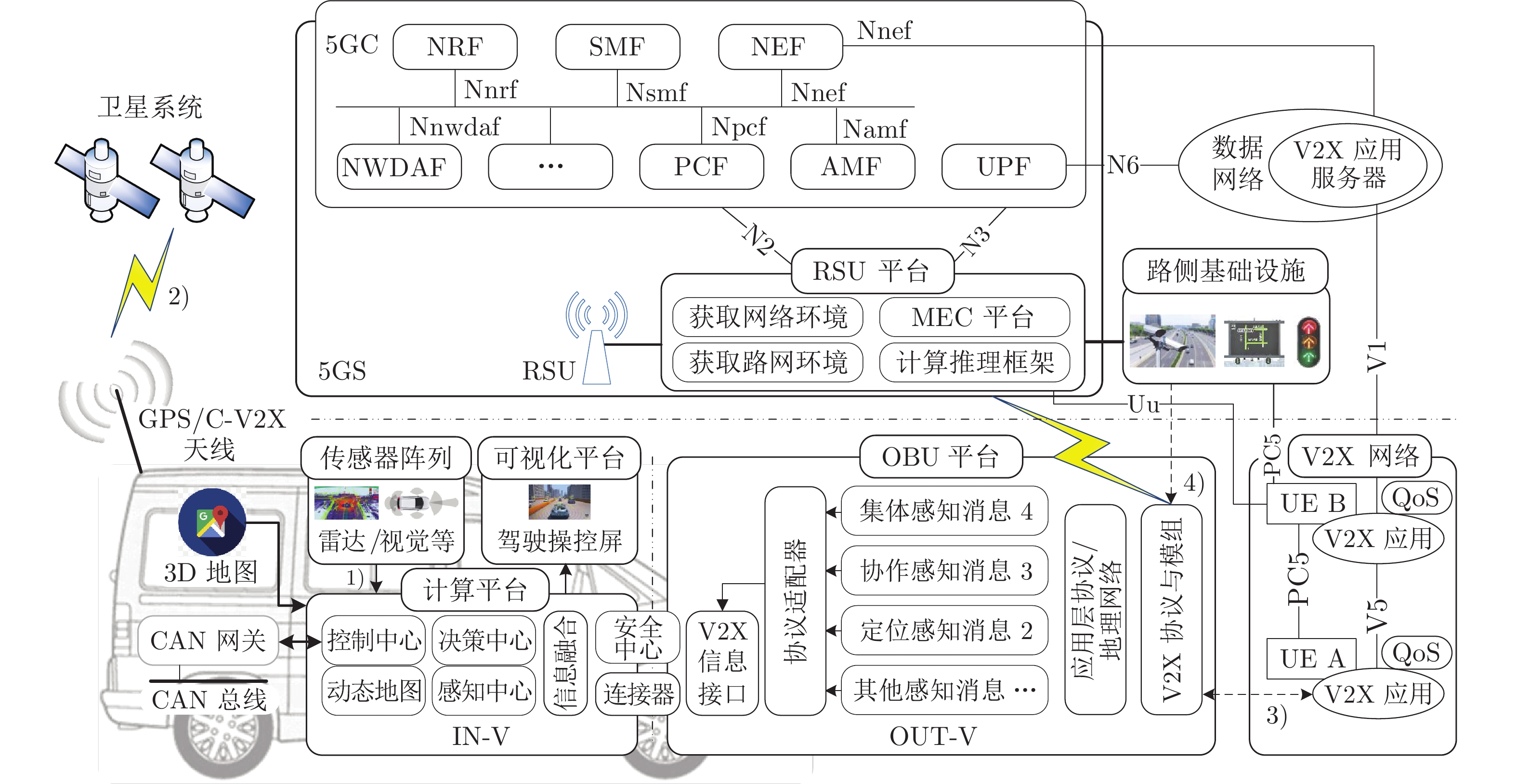
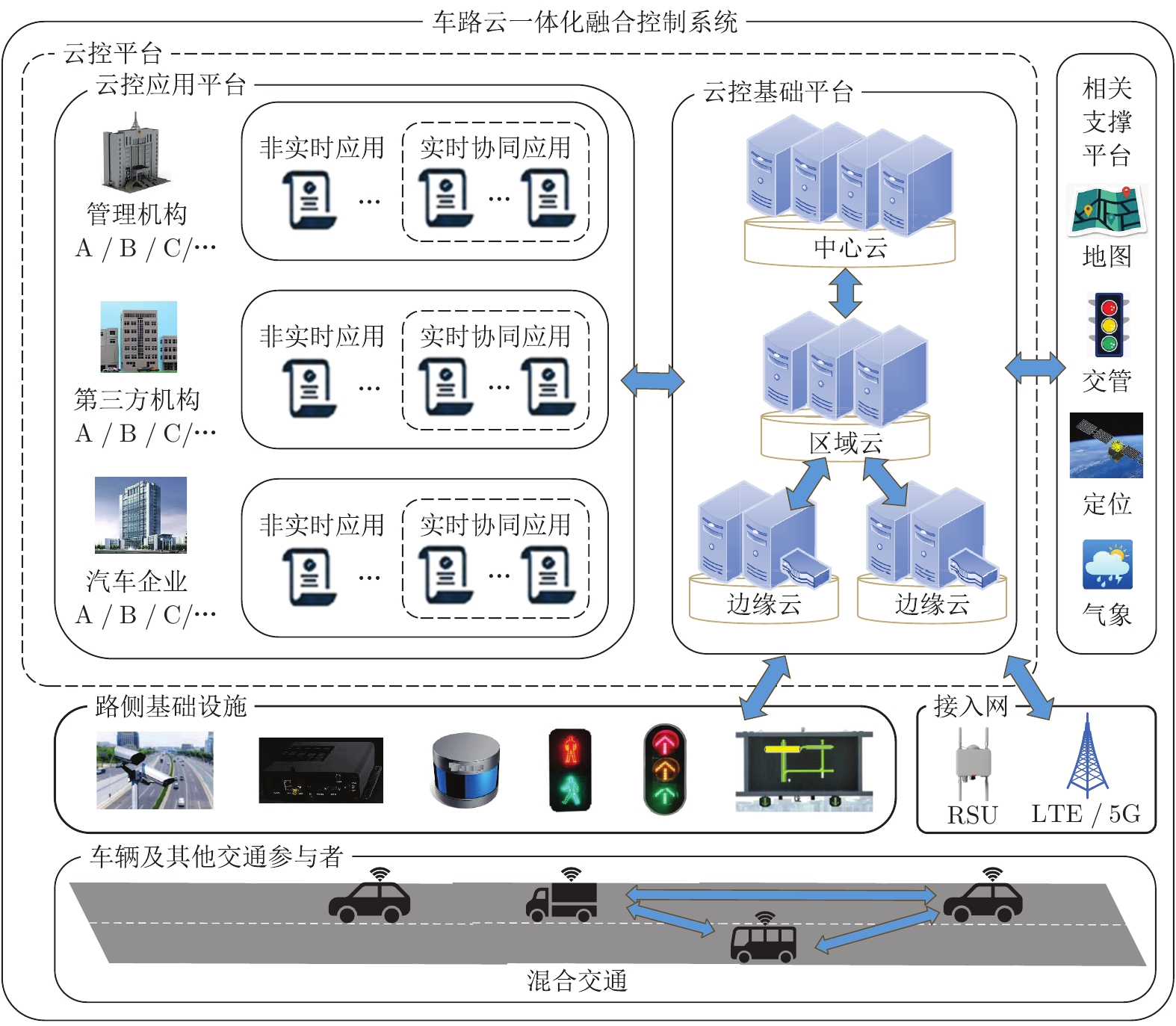
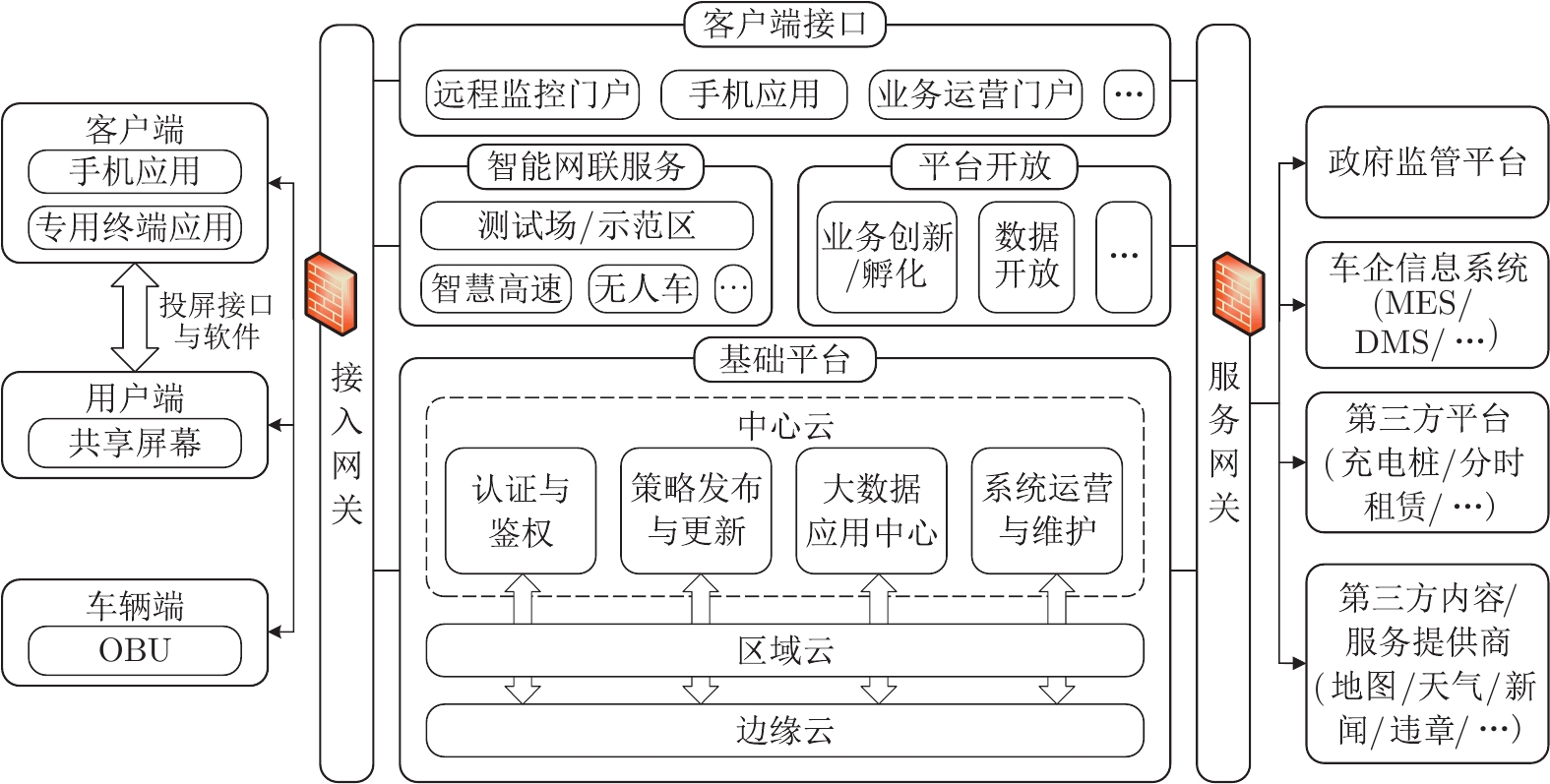
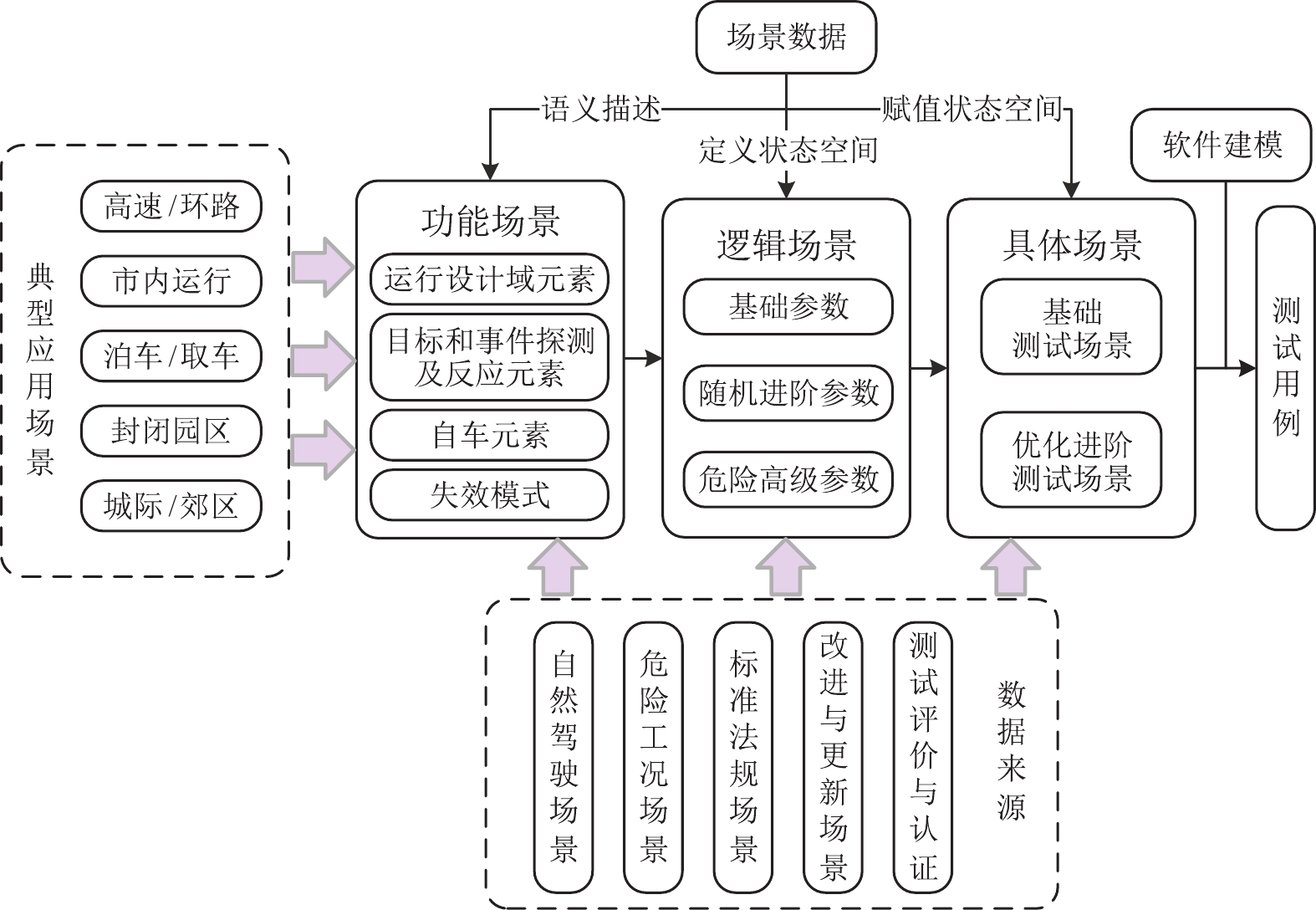
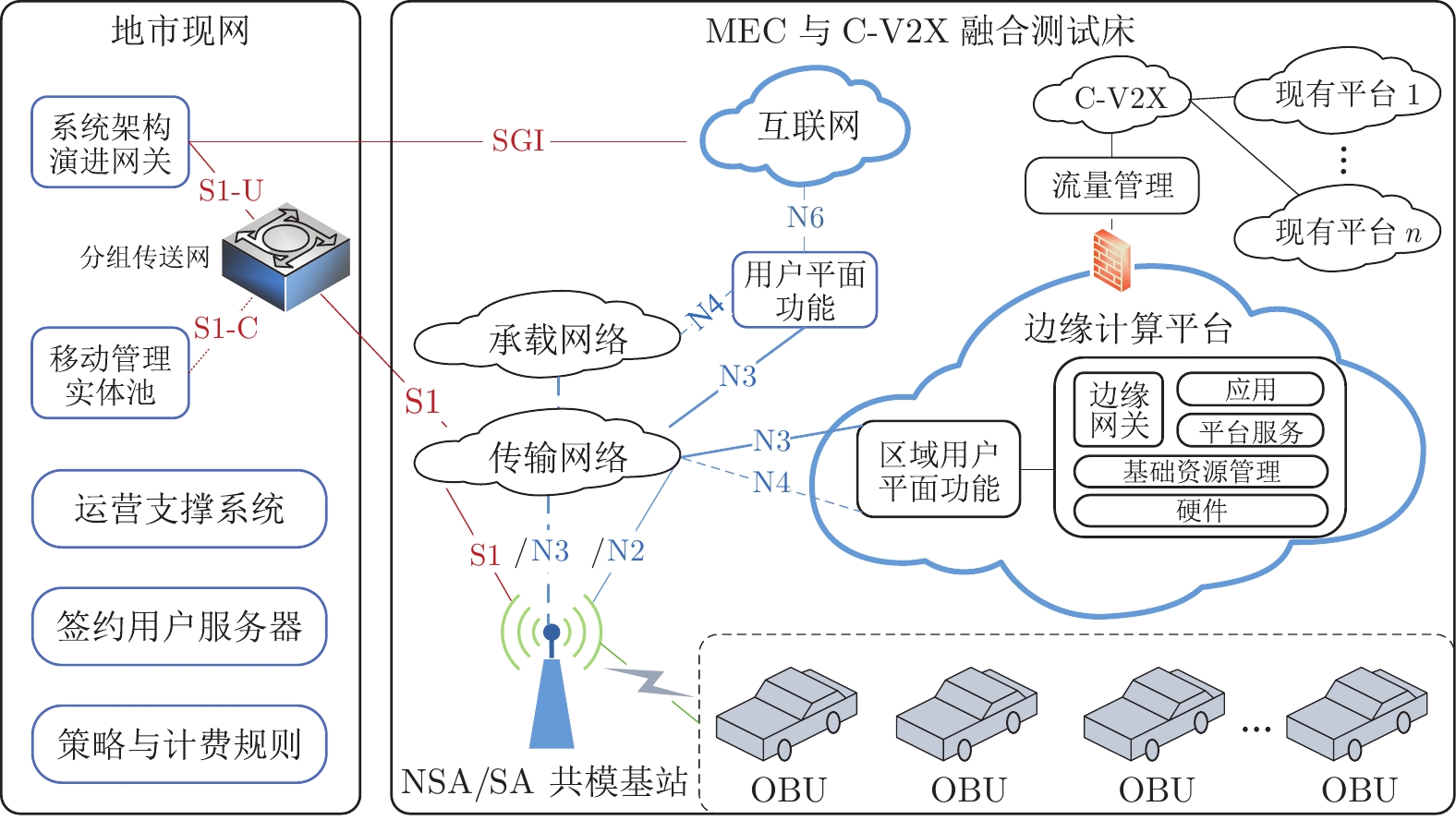
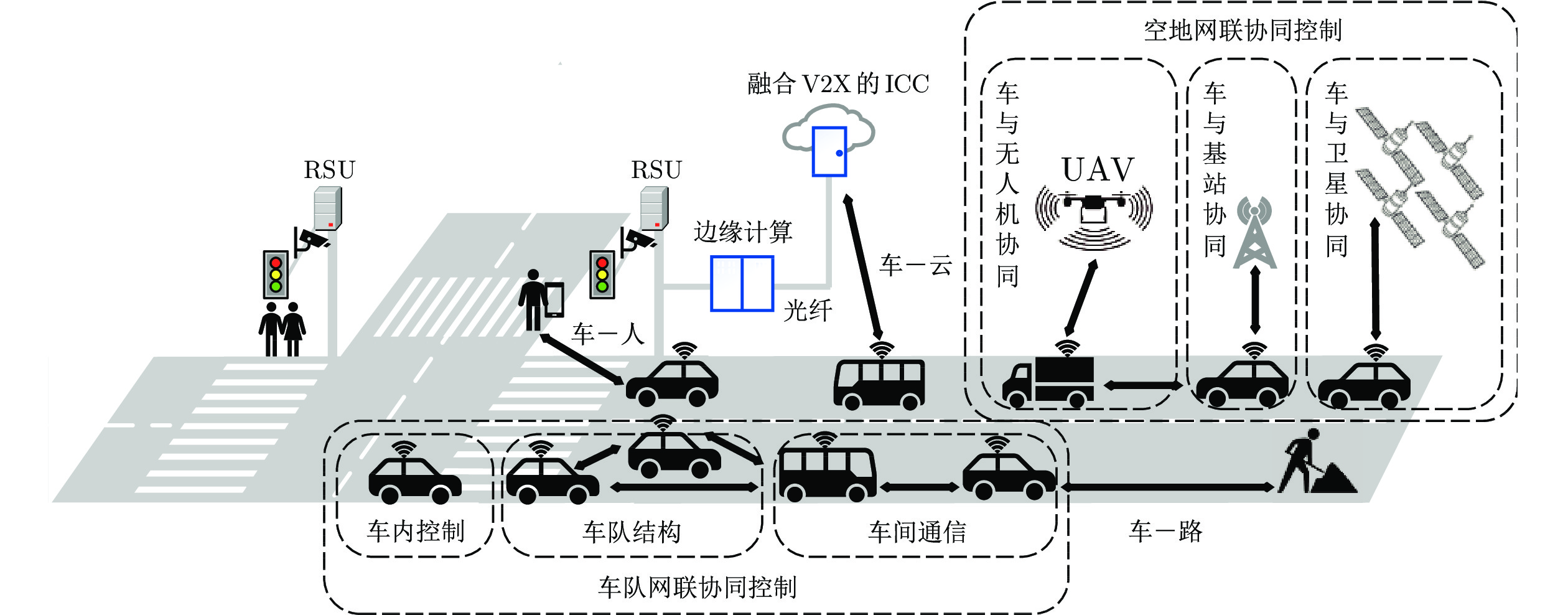
随着汽车产业电动化、智能化、网联化、共享化的发展驱动, 全球主要强国均将智能网联汽车列为国家战略发展方向. 蜂窝车联网、边缘计算网络和高精度定位系统的技术发展, 为车车、车路、车人和车云系统的全面融合提供了有效支撑. 车辆、道路、云平台与蜂窝车联网(Cellular vehicle-to-everything, C-V2X)网络的融合, 加速打通车内与车外、路面与路侧、云上与云间的信息互通, 为实现车路云一体化的融合感知、群体决策及协同控制提供了重要基础. 首先, 梳理了智能网联车路云协同系统架构与关键技术, 对该领域的演进特征、发展制约因素进行了总体概述; 其次, 阐述了新型车路云协同系统、智能网联C-V2X通信系统、云控系统和车路云协同测试系统的架构设计与工作原理; 然后, 从C-V2X组网、融合定位、测试评价角度, 介绍了车路云协同系统融合V2X网络、融合定位的技术演进与研究进展, 给出了智能网联场景的仿真平台、实车测试及评价指标; 最后, 对智能网联车路云协同系统的协同组网与控制、互操作、边缘智能服务和安全技术层面的发展趋势进行了展望.
随着汽车产业电动化、智能化、网联化、共享化的发展驱动, 全球主要强国均将智能网联汽车列为国家战略发展方向. 蜂窝车联网、边缘计算网络和高精度定位系统的技术发展, 为车车、车路、车人和车云系统的全面融合提供了有效支撑. 车辆、道路、云平台与蜂窝车联网(Cellular vehicle-to-everything, C-V2X)网络的融合, 加速打通车内与车外、路面与路侧、云上与云间的信息互通, 为实现车路云一体化的融合感知、群体决策及协同控制提供了重要基础. 首先, 梳理了智能网联车路云协同系统架构与关键技术, 对该领域的演进特征、发展制约因素进行了总体概述; 其次, 阐述了新型车路云协同系统、智能网联C-V2X通信系统、云控系统和车路云协同测试系统的架构设计与工作原理; 然后, 从C-V2X组网、融合定位、测试评价角度, 介绍了车路云协同系统融合V2X网络、融合定位的技术演进与研究进展, 给出了智能网联场景的仿真平台、实车测试及评价指标; 最后, 对智能网联车路云协同系统的协同组网与控制、互操作、边缘智能服务和安全技术层面的发展趋势进行了展望.


2022, 48(12): 2886-2910.
doi: 10.16383/j.aas.c201023
摘要:
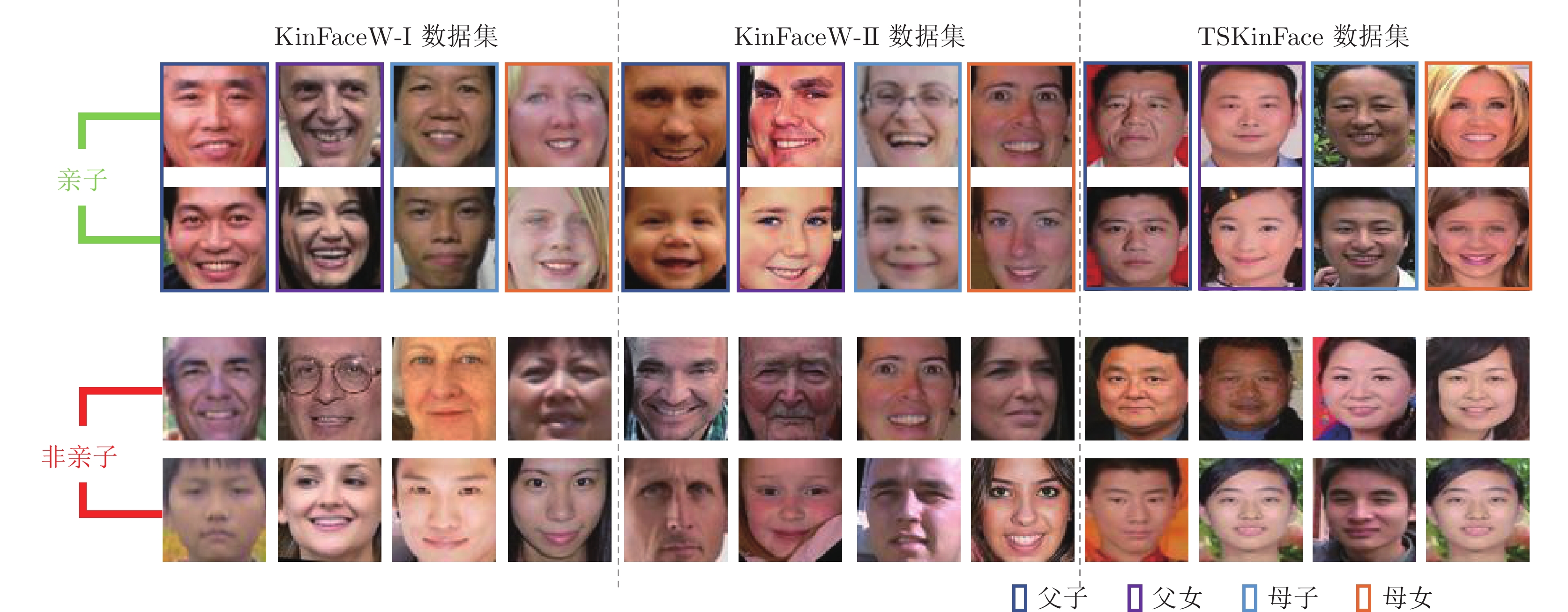
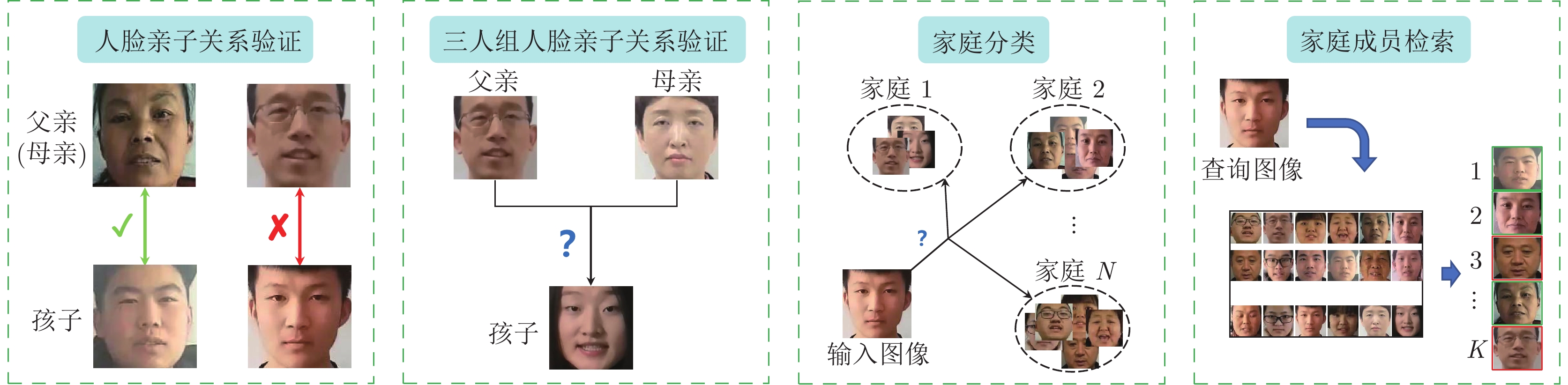
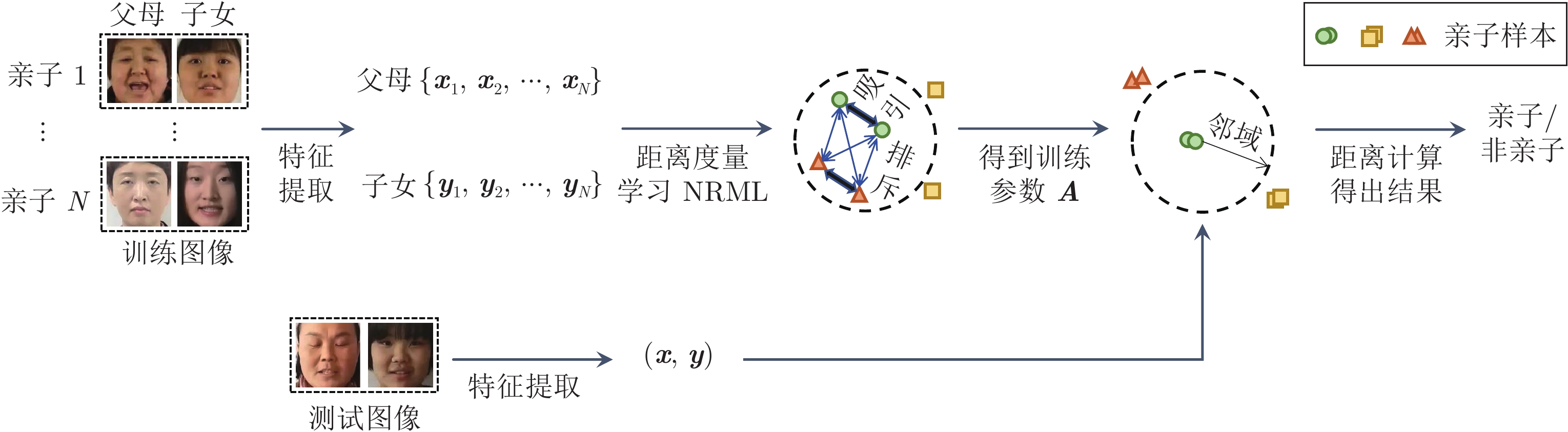
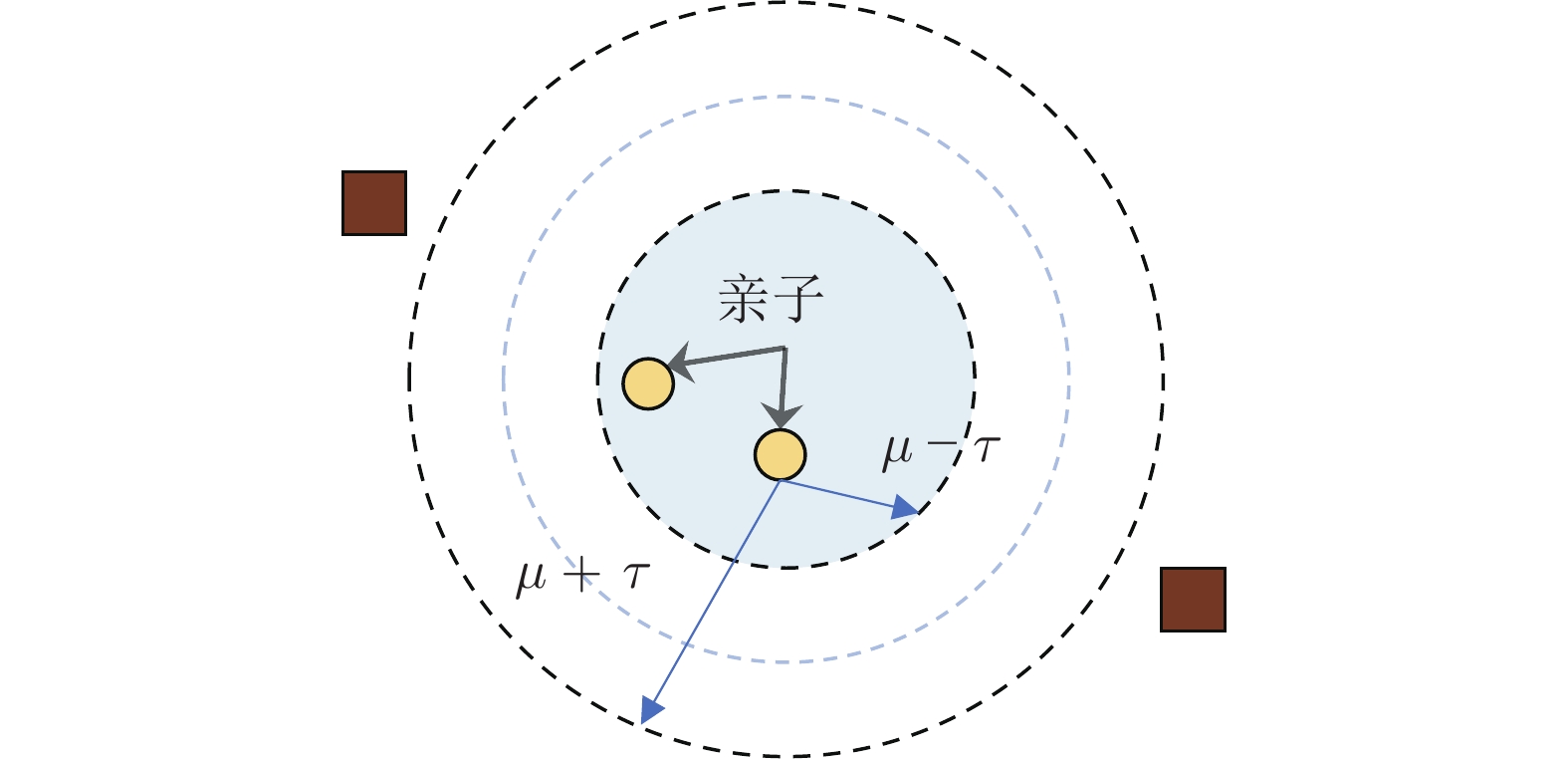
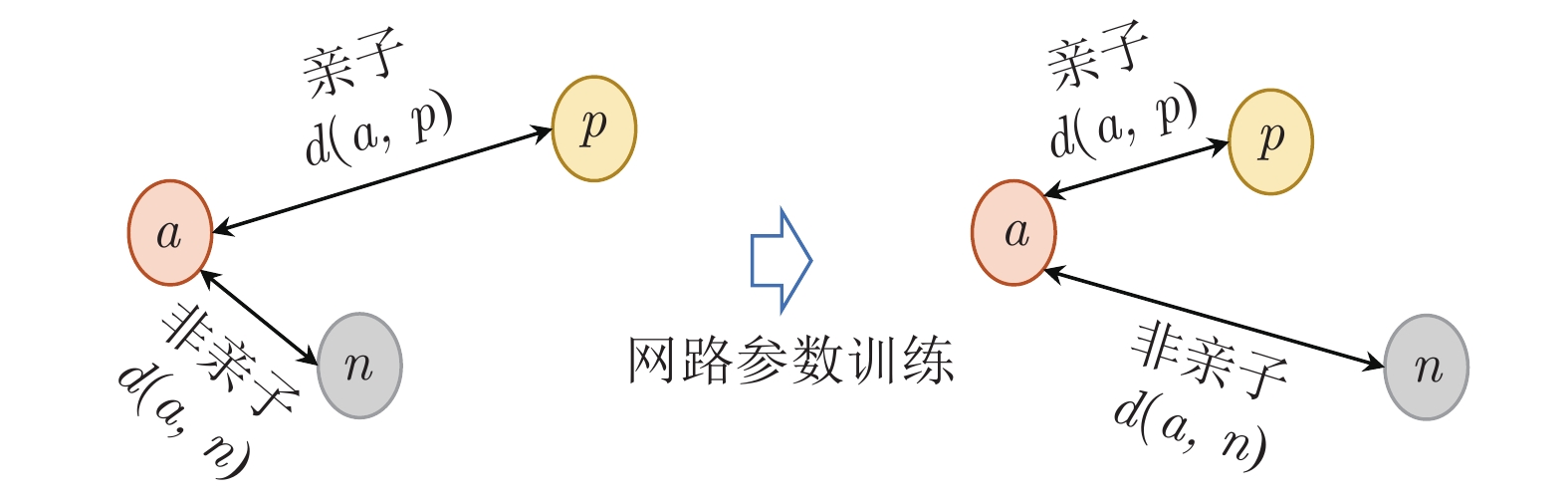
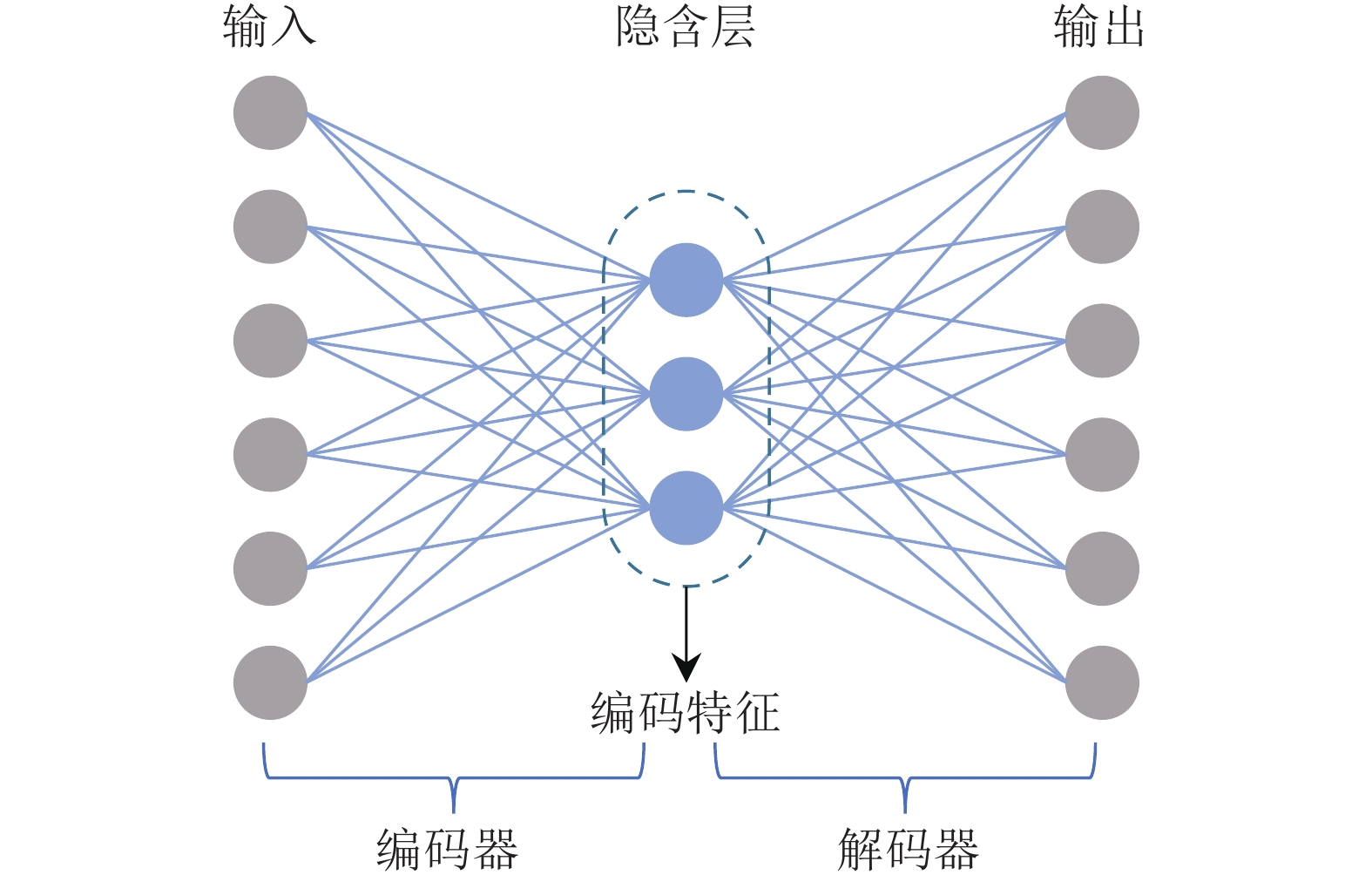
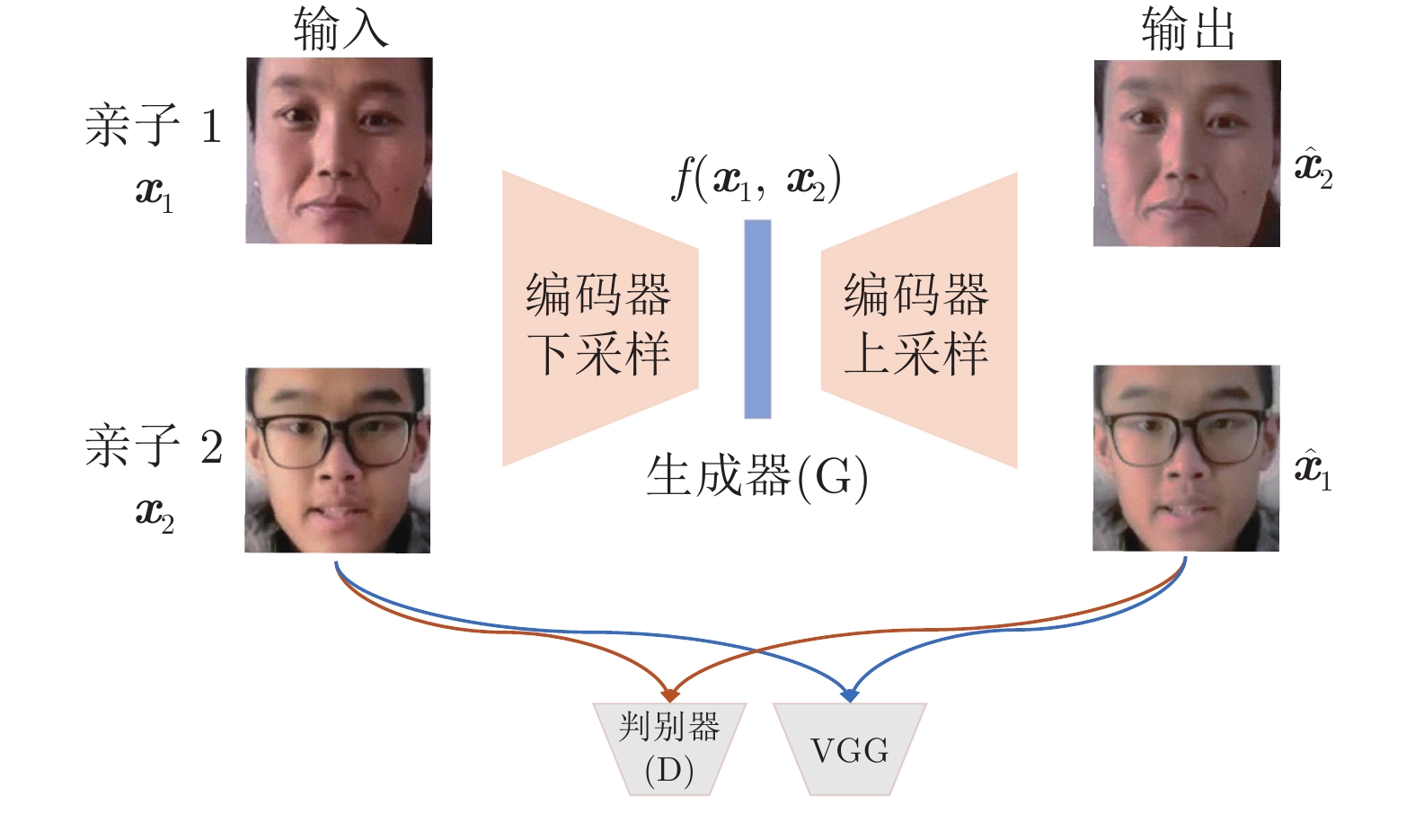
人脸亲子关系验证即通过给定的不同人的两幅人脸图像判断其是否具有亲子关系, 是计算机视觉和机器学习领域中一个重要的研究问题, 在丢失儿童寻找、社会媒体分析、图像自动标注等领域具有广泛的应用价值. 随着人脸亲子关系验证问题受到越来越多的关注, 其在多个方面都得到了相应的发展, 本文对人脸亲子关系验证方法做了综述整理. 首先, 简要介绍了人脸亲子关系验证在近十年的研究现状, 随后对问题进行了定义并讨论其面临的挑战. 接下来, 汇总了常用的亲子数据库, 对数据库属性做了详细的总结和对比. 然后, 对人脸亲子关系验证方法进行了分类总结、对比, 以及不同方法的性能表现. 最后, 展望了人脸亲子关系验证今后可能的研究方向.
人脸亲子关系验证即通过给定的不同人的两幅人脸图像判断其是否具有亲子关系, 是计算机视觉和机器学习领域中一个重要的研究问题, 在丢失儿童寻找、社会媒体分析、图像自动标注等领域具有广泛的应用价值. 随着人脸亲子关系验证问题受到越来越多的关注, 其在多个方面都得到了相应的发展, 本文对人脸亲子关系验证方法做了综述整理. 首先, 简要介绍了人脸亲子关系验证在近十年的研究现状, 随后对问题进行了定义并讨论其面临的挑战. 接下来, 汇总了常用的亲子数据库, 对数据库属性做了详细的总结和对比. 然后, 对人脸亲子关系验证方法进行了分类总结、对比, 以及不同方法的性能表现. 最后, 展望了人脸亲子关系验证今后可能的研究方向.







2022, 48(12): 2911-2921.
doi: 10.16383/j.aas.c190828
摘要:
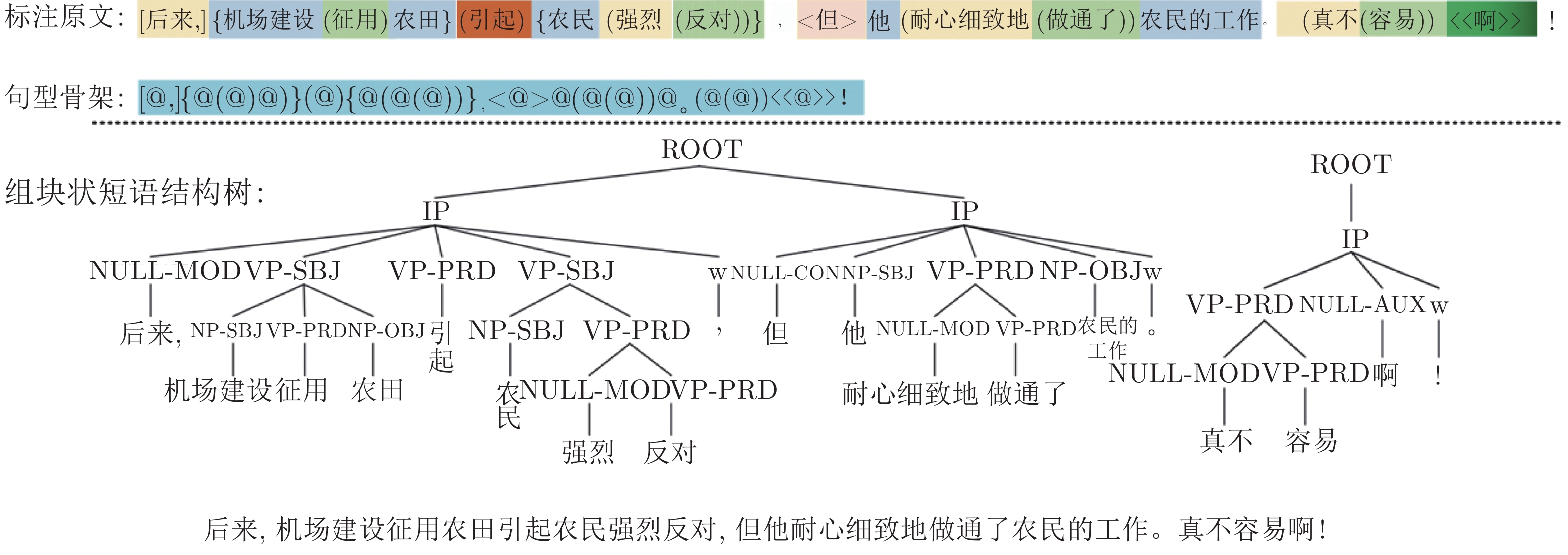
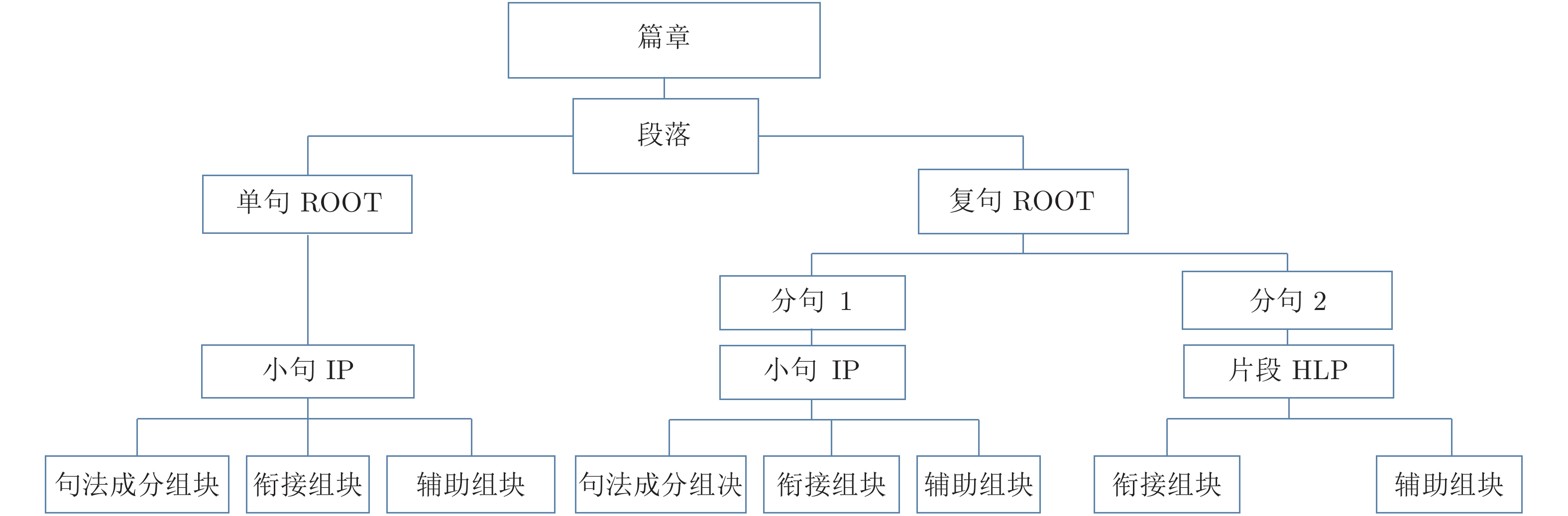
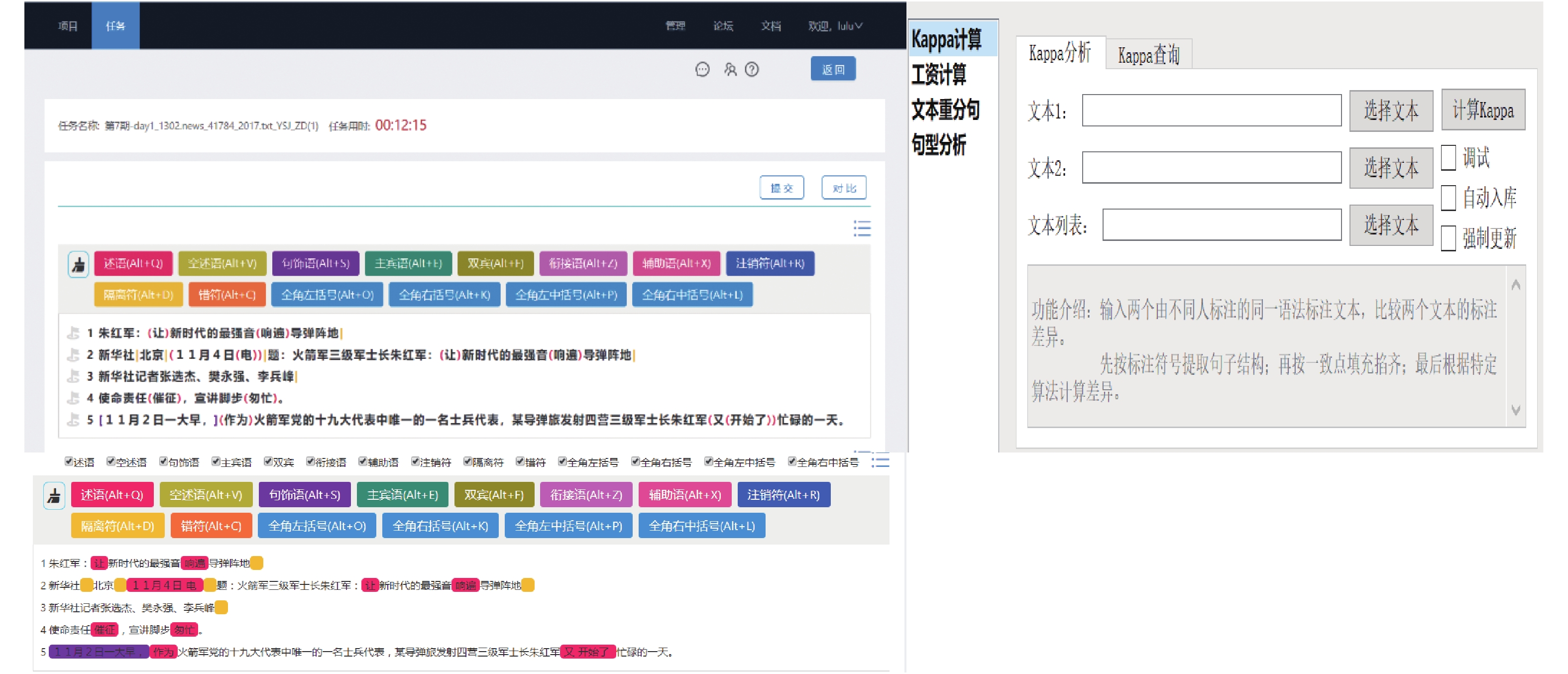
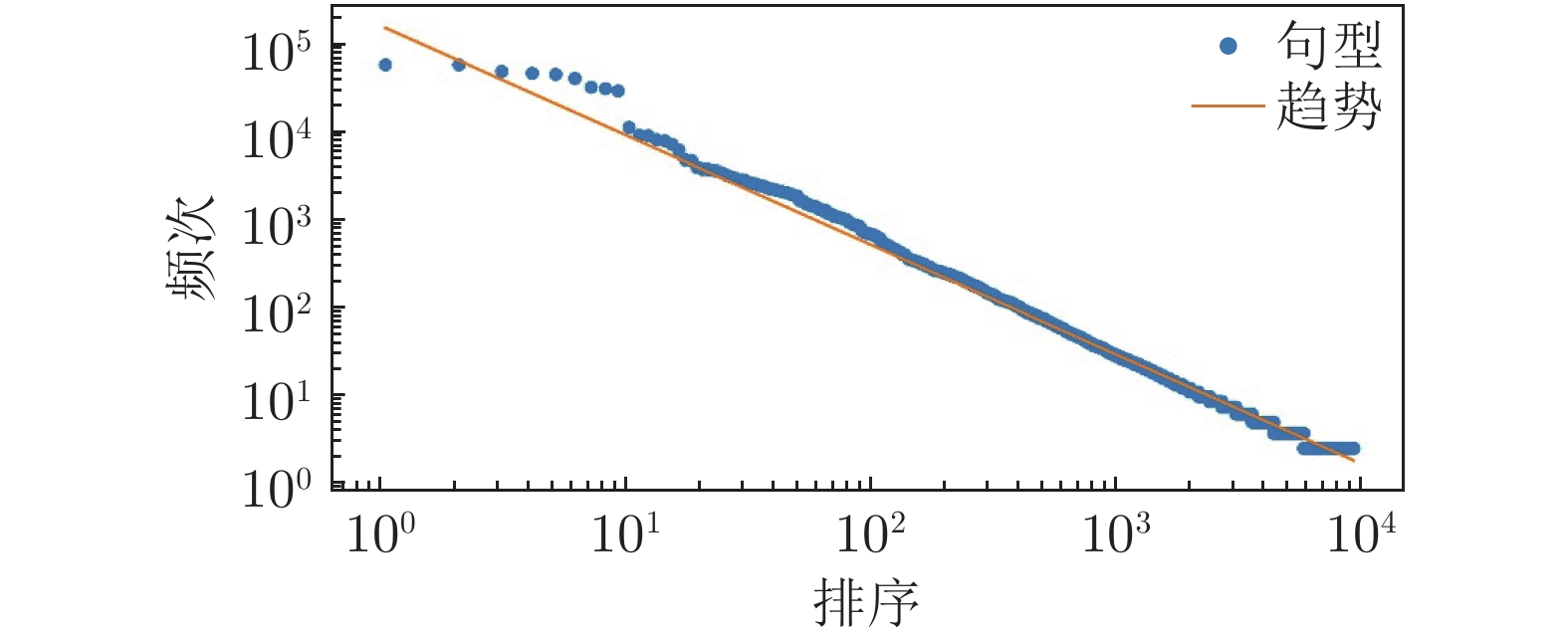
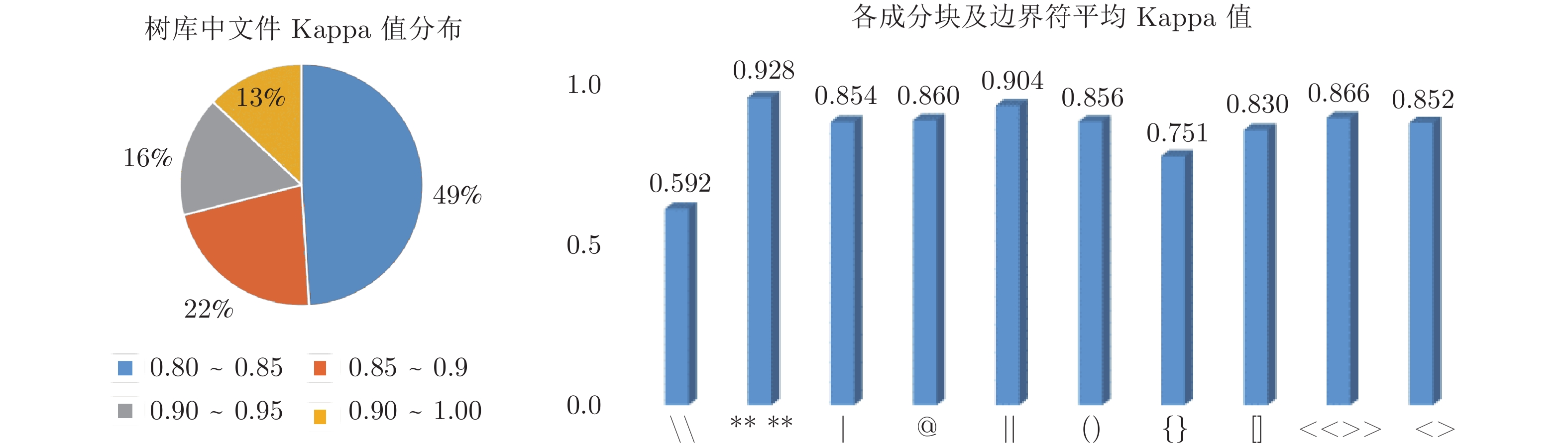
为快速构建一个大规模、多领域的高质树库, 提出一种基于短语功能与句法角色组块的、便于标注多层次结构的标注体系, 在篇章中综合利用标点、句法结构、表述功能作为句边界判断标准, 确立合理的句边界与层次; 在句子中以组块的句法功能为主, 参考篇章功能、人际功能, 以4个性质标记、8个功能标记、4个句标记来描写句中3类5种组块, 标注基本句型骨架, 突出中心词信息. 目前已初步构建有质量保证的千万汉字规模的浅层结构分析树, 包含60余万小句的9千余条句型结构库, 语料涉及百科、新闻、专利等应用领域文本1万余篇; 同时, 也探索了高效的标注众包管理模式.
为快速构建一个大规模、多领域的高质树库, 提出一种基于短语功能与句法角色组块的、便于标注多层次结构的标注体系, 在篇章中综合利用标点、句法结构、表述功能作为句边界判断标准, 确立合理的句边界与层次; 在句子中以组块的句法功能为主, 参考篇章功能、人际功能, 以4个性质标记、8个功能标记、4个句标记来描写句中3类5种组块, 标注基本句型骨架, 突出中心词信息. 目前已初步构建有质量保证的千万汉字规模的浅层结构分析树, 包含60余万小句的9千余条句型结构库, 语料涉及百科、新闻、专利等应用领域文本1万余篇; 同时, 也探索了高效的标注众包管理模式.

2022, 48(12): 2922-2930.
doi: 10.16383/j.aas.c190731
摘要:
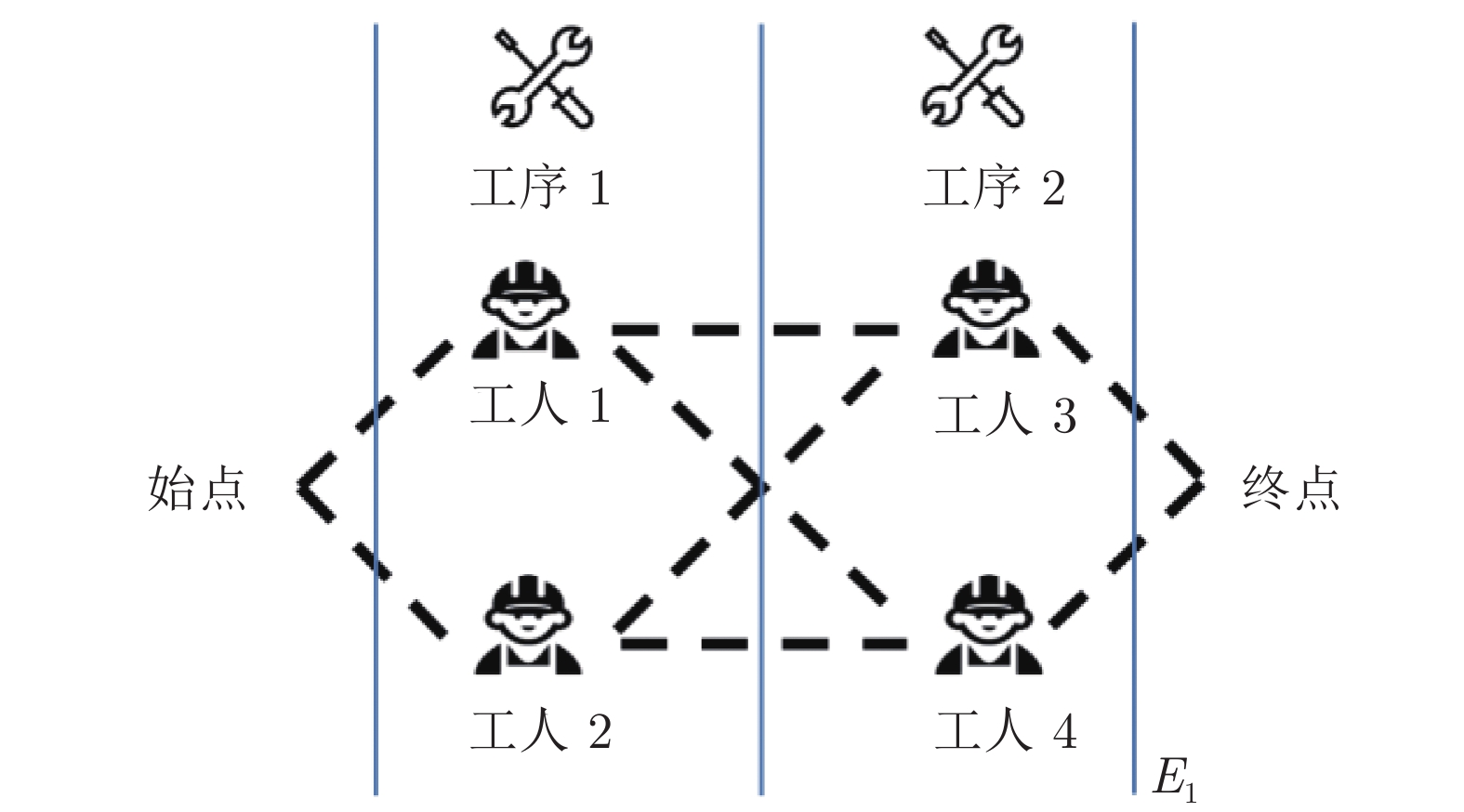
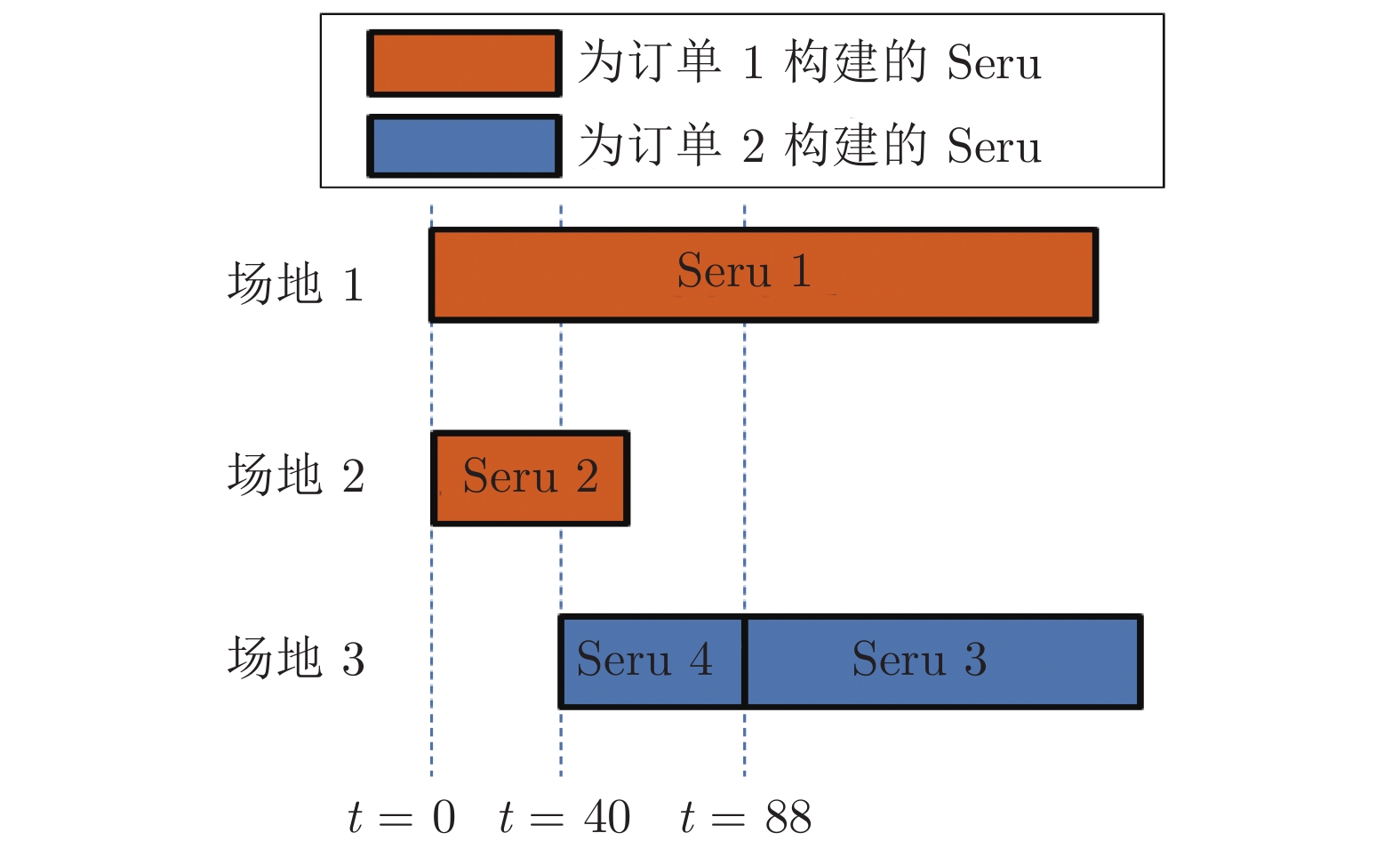
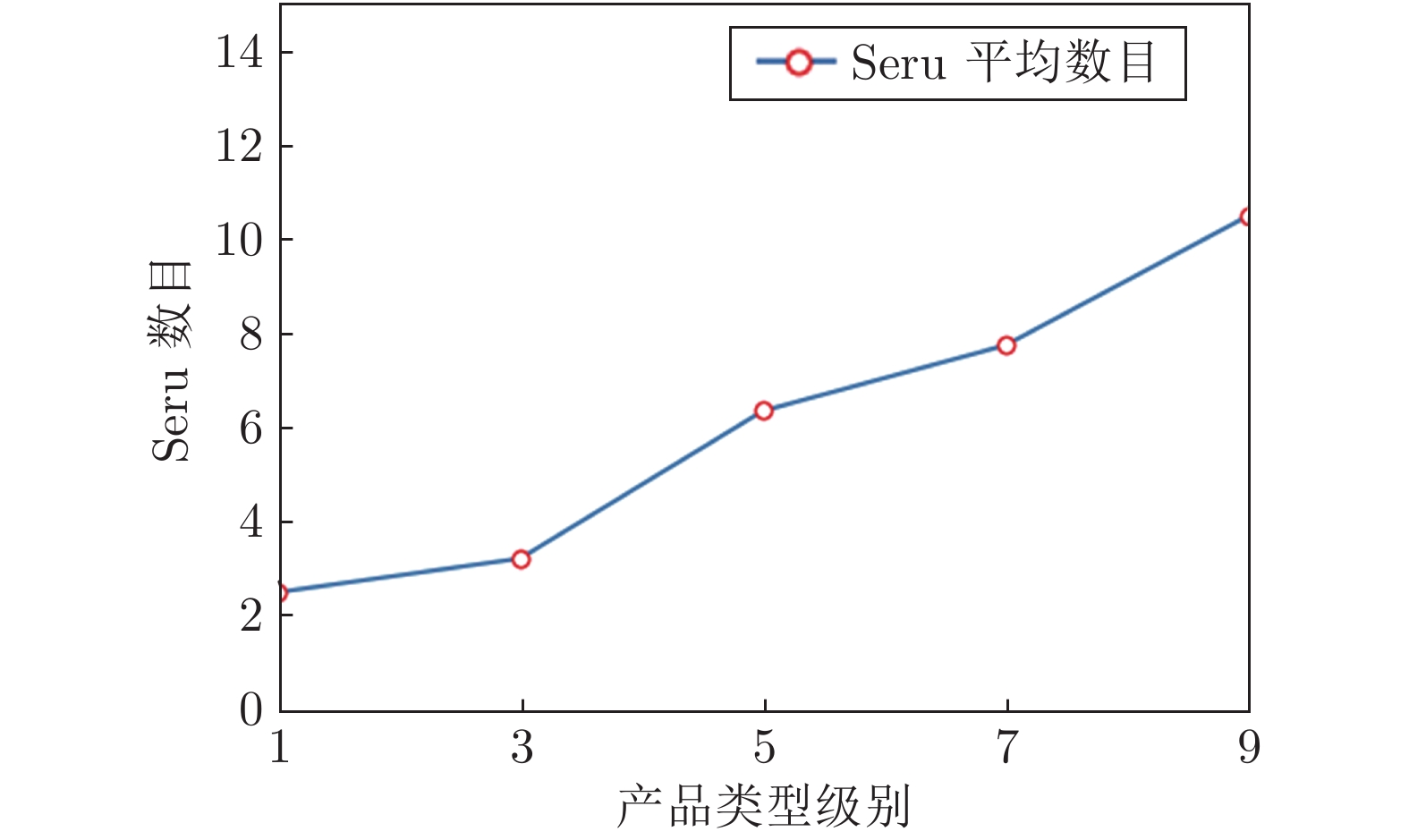
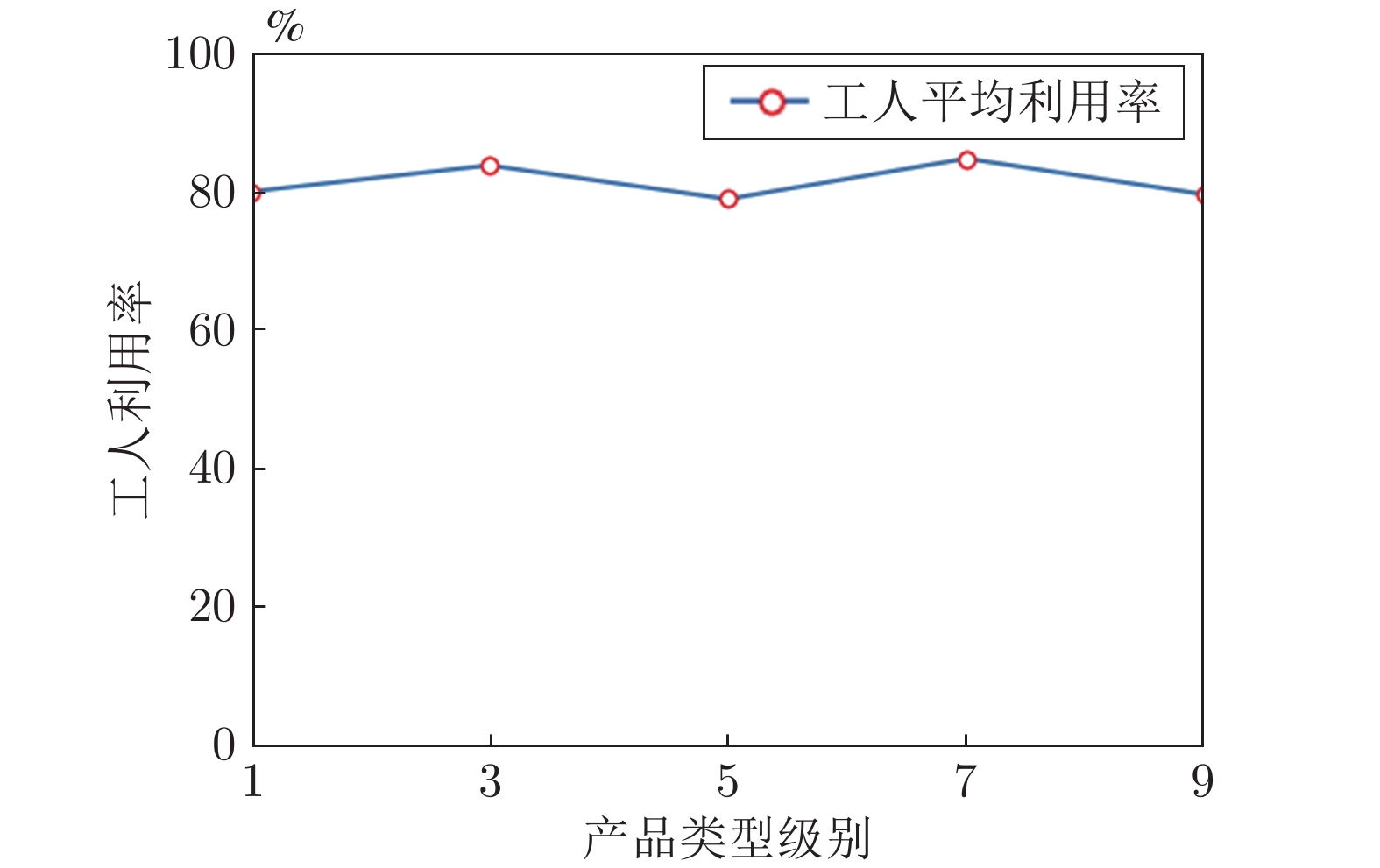
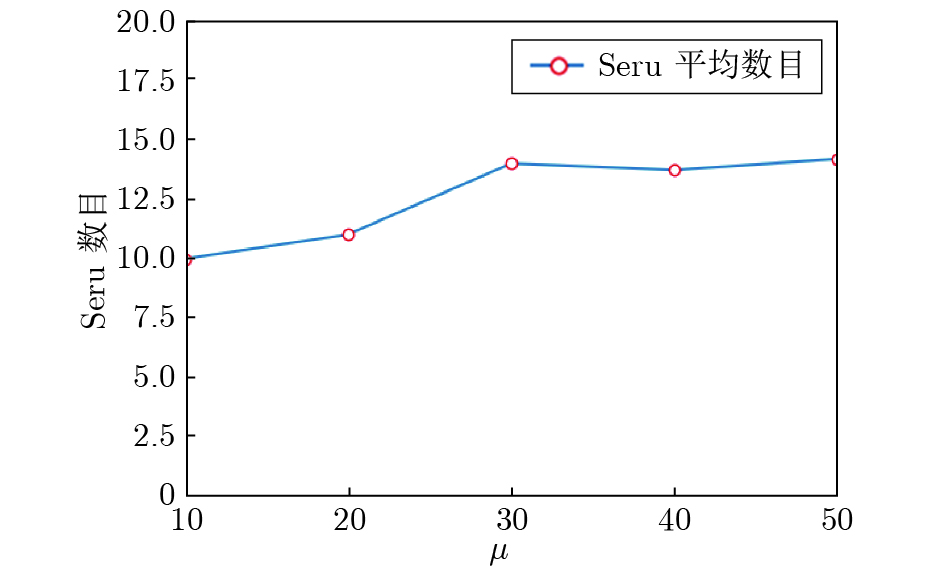
当前市场环境具有多品种、变批量、产品生命周期短的波动特点, 赛汝生产系统(Seru production system, SPS)是一种目前广泛应用于电子制造行业的新型生产方式, 其具有优良的重构性和响应能力, 适合于应对波动市场环境. 本文提出了一个两阶段的赛汝生产系统构建问题模型, 两个阶段分别是Seru构建和Seru调度, 并证明了这两个问题模型均是NP难的, 结合模型分析给出了相应的精确/近似算法. 实验结果表明, 在波动市场环境下按照本文模型与方法构建出的赛汝生产系统其工人利用率始终保持在较高水平, 系统具有较强的重构性能和响应能力.
当前市场环境具有多品种、变批量、产品生命周期短的波动特点, 赛汝生产系统(Seru production system, SPS)是一种目前广泛应用于电子制造行业的新型生产方式, 其具有优良的重构性和响应能力, 适合于应对波动市场环境. 本文提出了一个两阶段的赛汝生产系统构建问题模型, 两个阶段分别是Seru构建和Seru调度, 并证明了这两个问题模型均是NP难的, 结合模型分析给出了相应的精确/近似算法. 实验结果表明, 在波动市场环境下按照本文模型与方法构建出的赛汝生产系统其工人利用率始终保持在较高水平, 系统具有较强的重构性能和响应能力.



2022, 48(12): 2931-2940.
doi: 10.16383/j.aas.c220025
摘要:
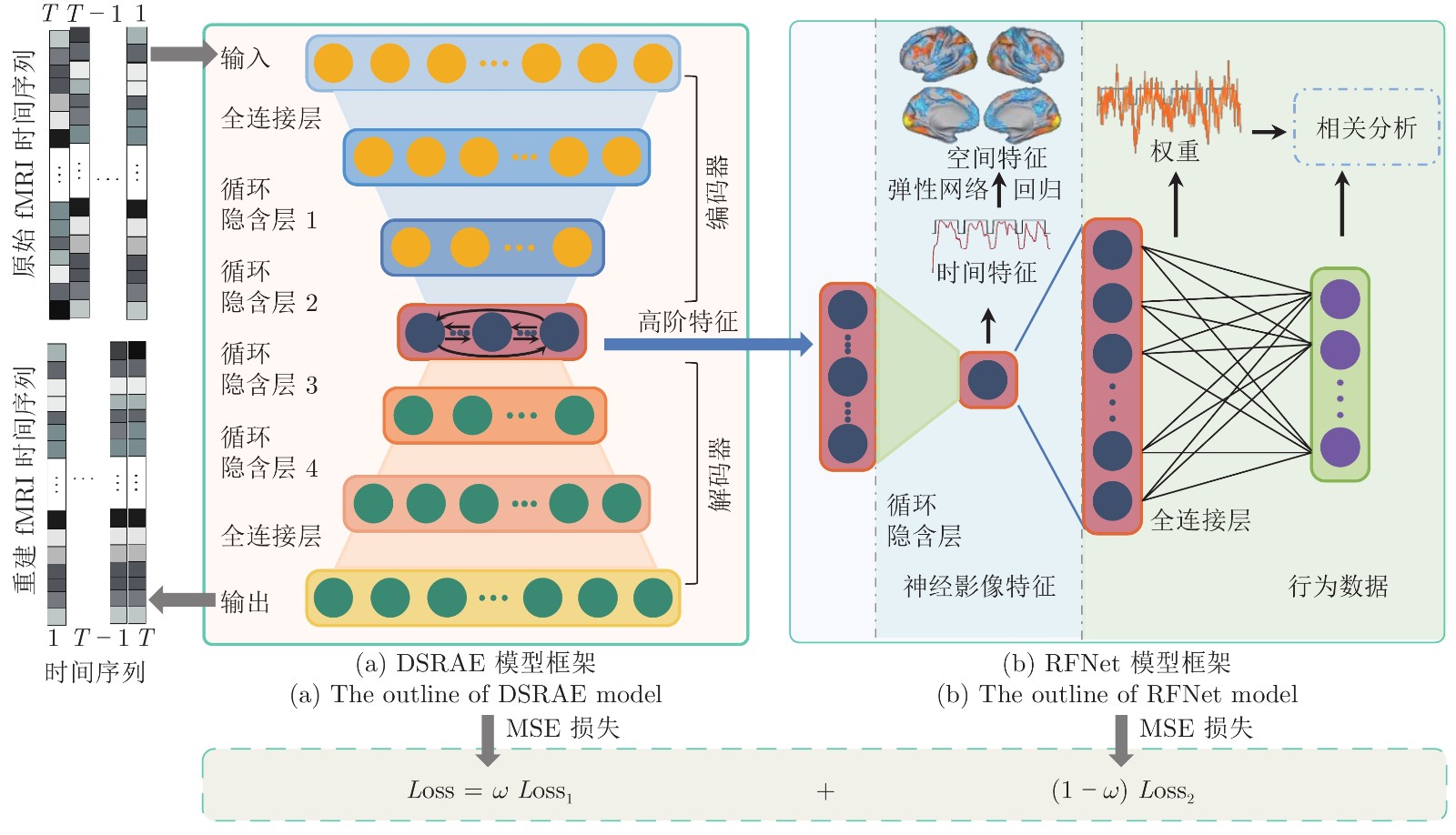
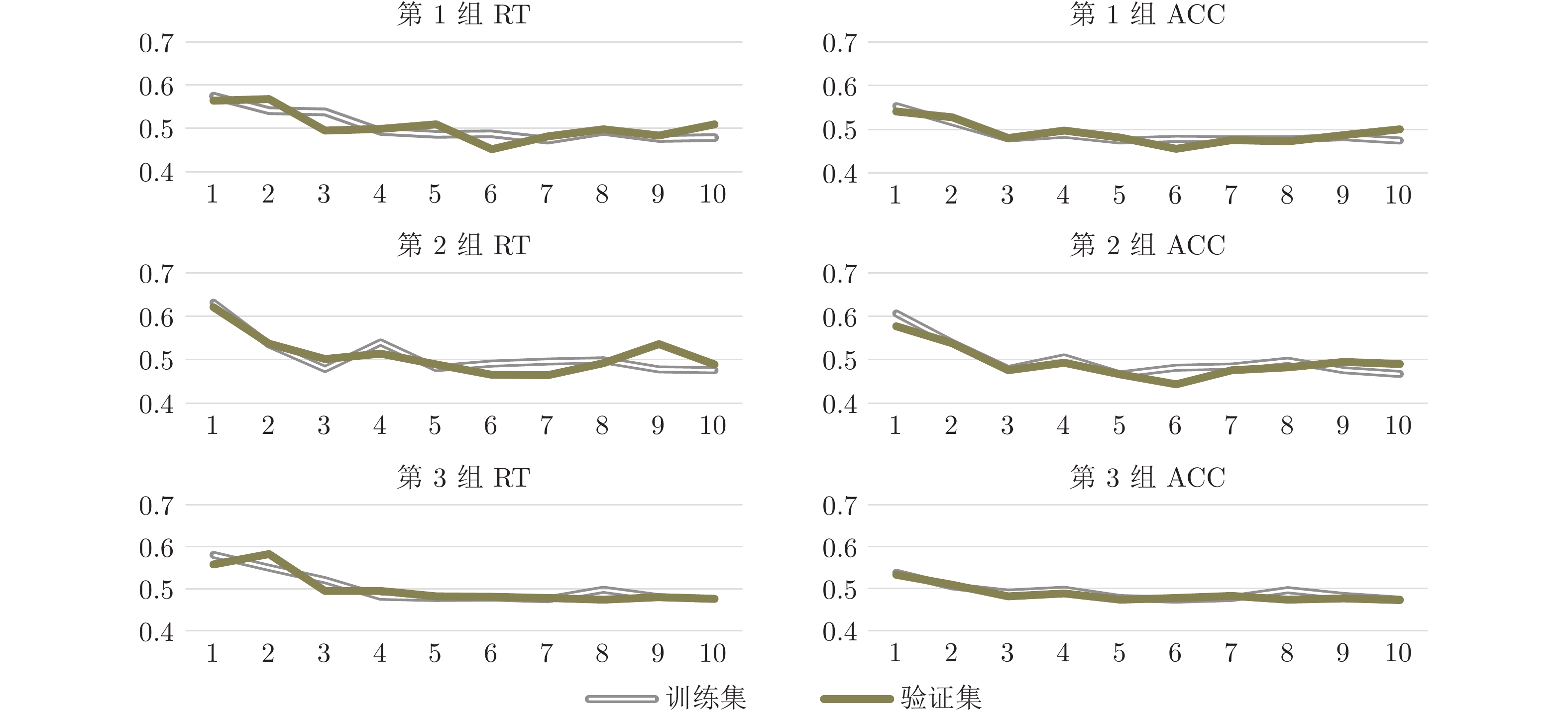
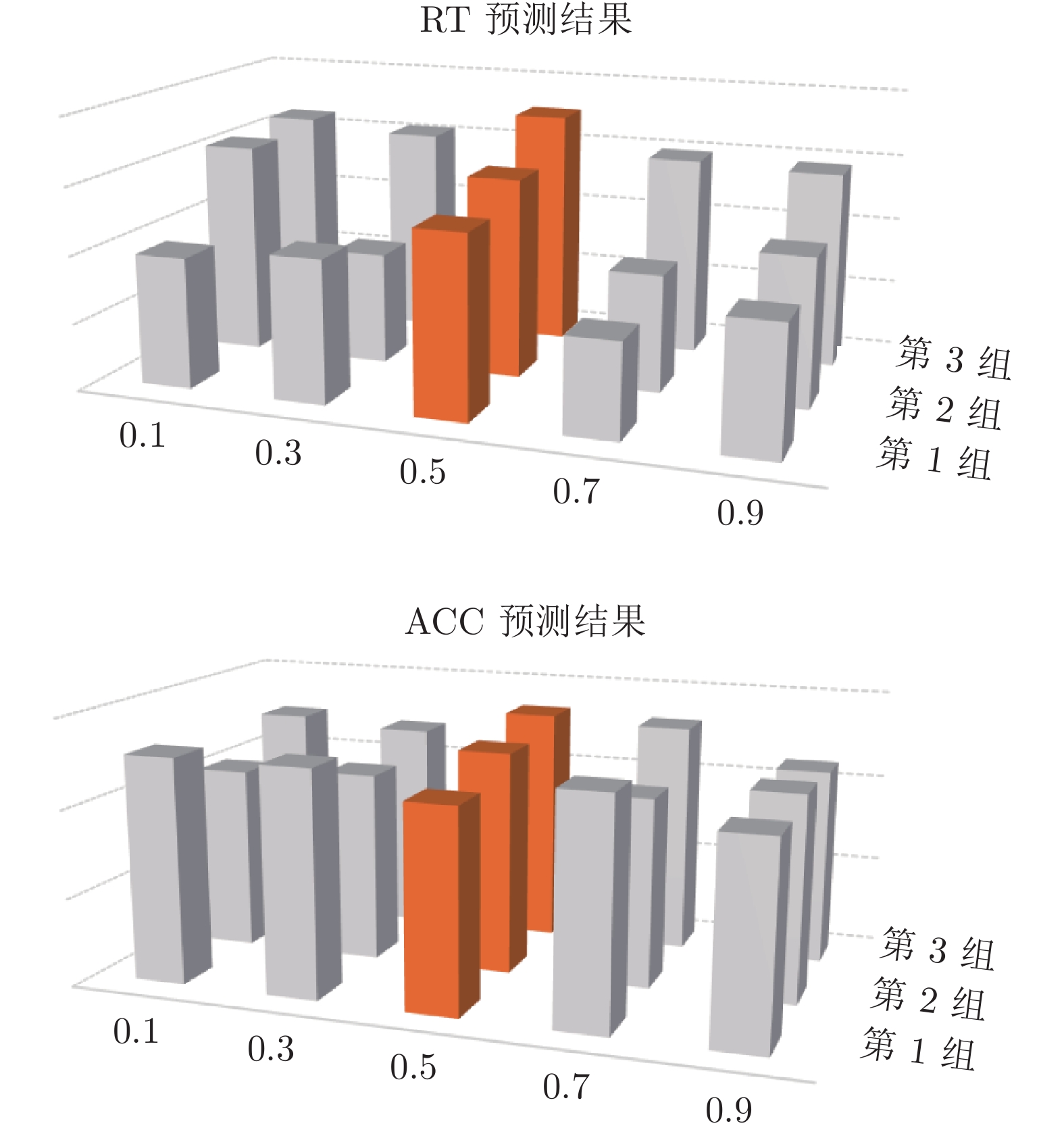
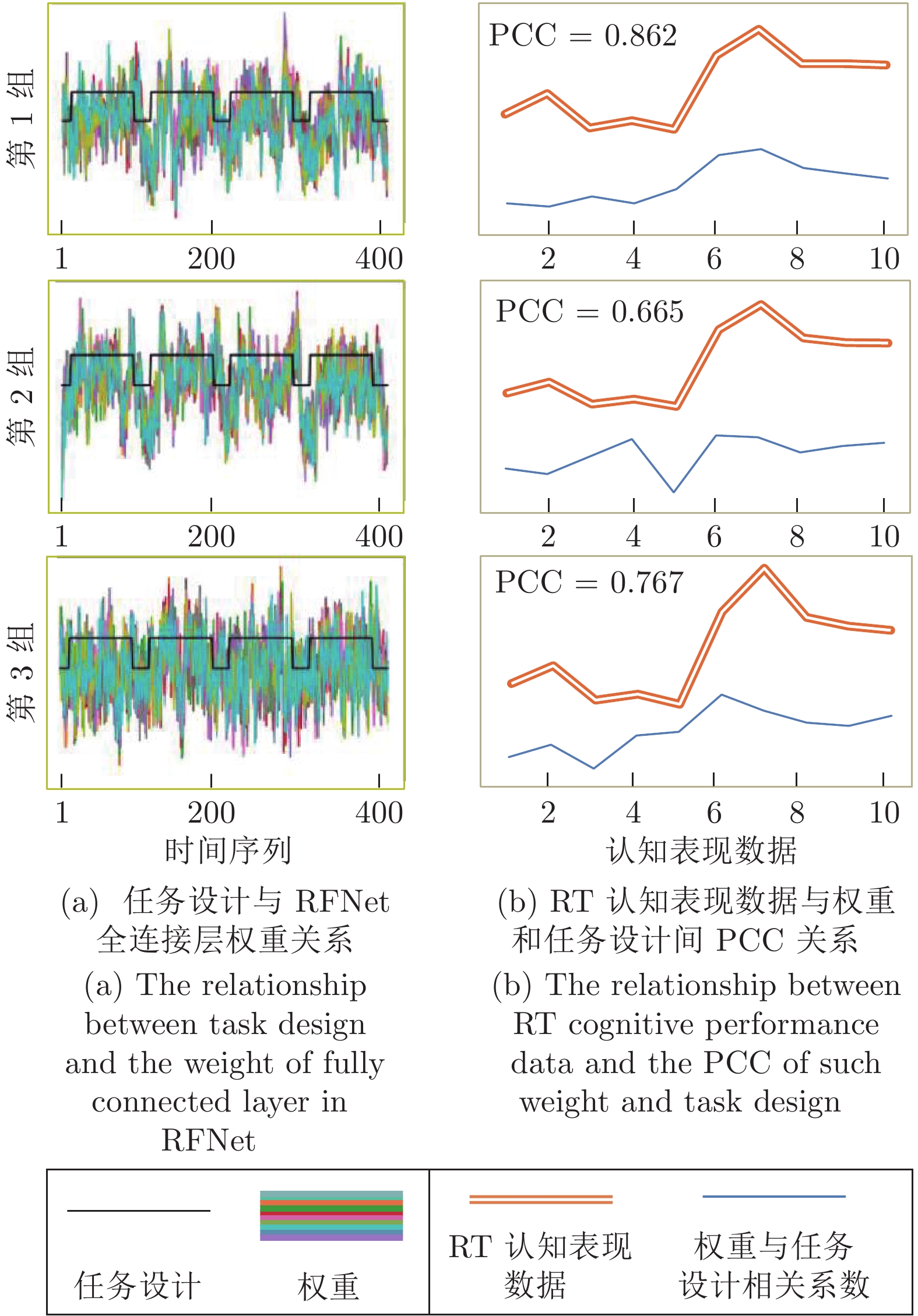
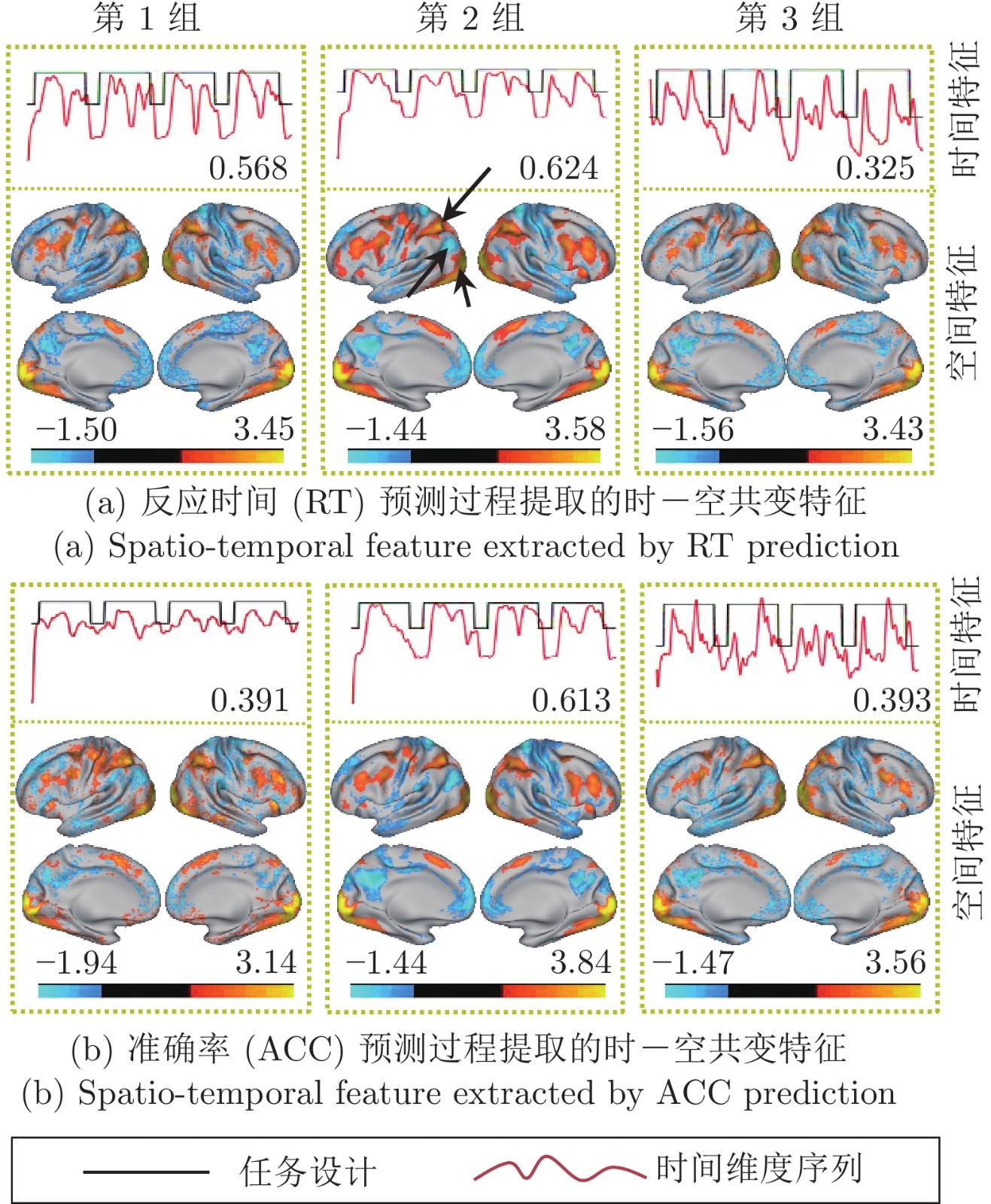
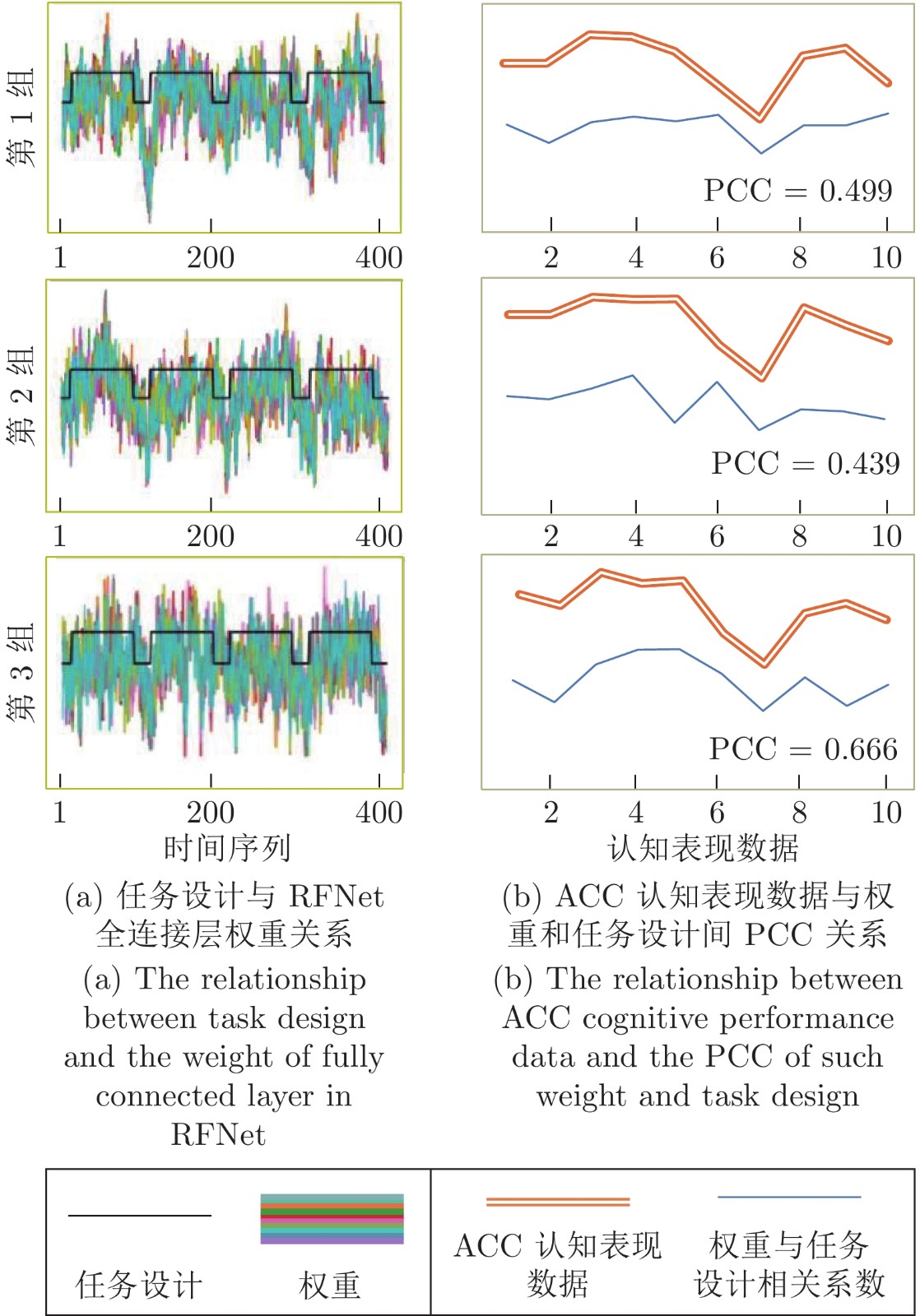
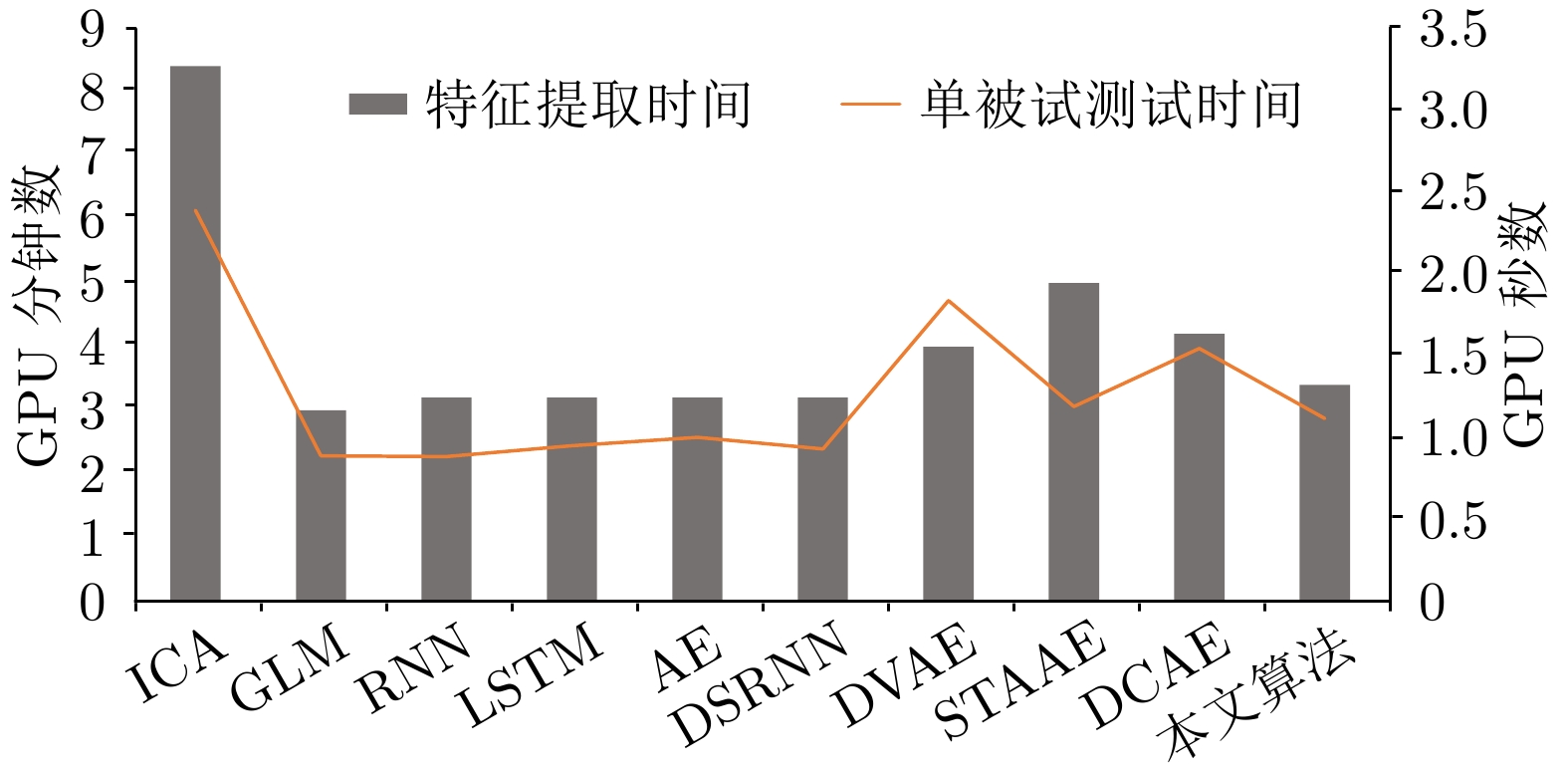
认知表现预测已经成为当前大脑研究的重要课题. 功能磁共振成像技术由于同时具有较好的时间和空间分辨率, 有潜力为认知表现预测提供数据支持. 为了解决基于功能磁共振成像数据对认知表现进行预测时大脑所具有的时−空共变难刻画问题, 提出了一种新型基于大脑学习机制的时−空共变混合深度学习模型, 即深度稀疏自编码器与循环全连接网络混合模型, 以混合神经网络模型的损失函数误差作为认知表现预测能力的评价标准. 在人类连接组项目数据集上的实验结果表明, 提出的时−空共变混合模型能够有效和稳健地预测认知表现, 并提取到与人脑学习、记忆相关的有意义的脑影像特征, 从而为认知表现预测提供技术支持.
认知表现预测已经成为当前大脑研究的重要课题. 功能磁共振成像技术由于同时具有较好的时间和空间分辨率, 有潜力为认知表现预测提供数据支持. 为了解决基于功能磁共振成像数据对认知表现进行预测时大脑所具有的时−空共变难刻画问题, 提出了一种新型基于大脑学习机制的时−空共变混合深度学习模型, 即深度稀疏自编码器与循环全连接网络混合模型, 以混合神经网络模型的损失函数误差作为认知表现预测能力的评价标准. 在人类连接组项目数据集上的实验结果表明, 提出的时−空共变混合模型能够有效和稳健地预测认知表现, 并提取到与人脑学习、记忆相关的有意义的脑影像特征, 从而为认知表现预测提供技术支持.
2022, 48(12): 2941-2950.
doi: 10.16383/j.aas.c190607
摘要:
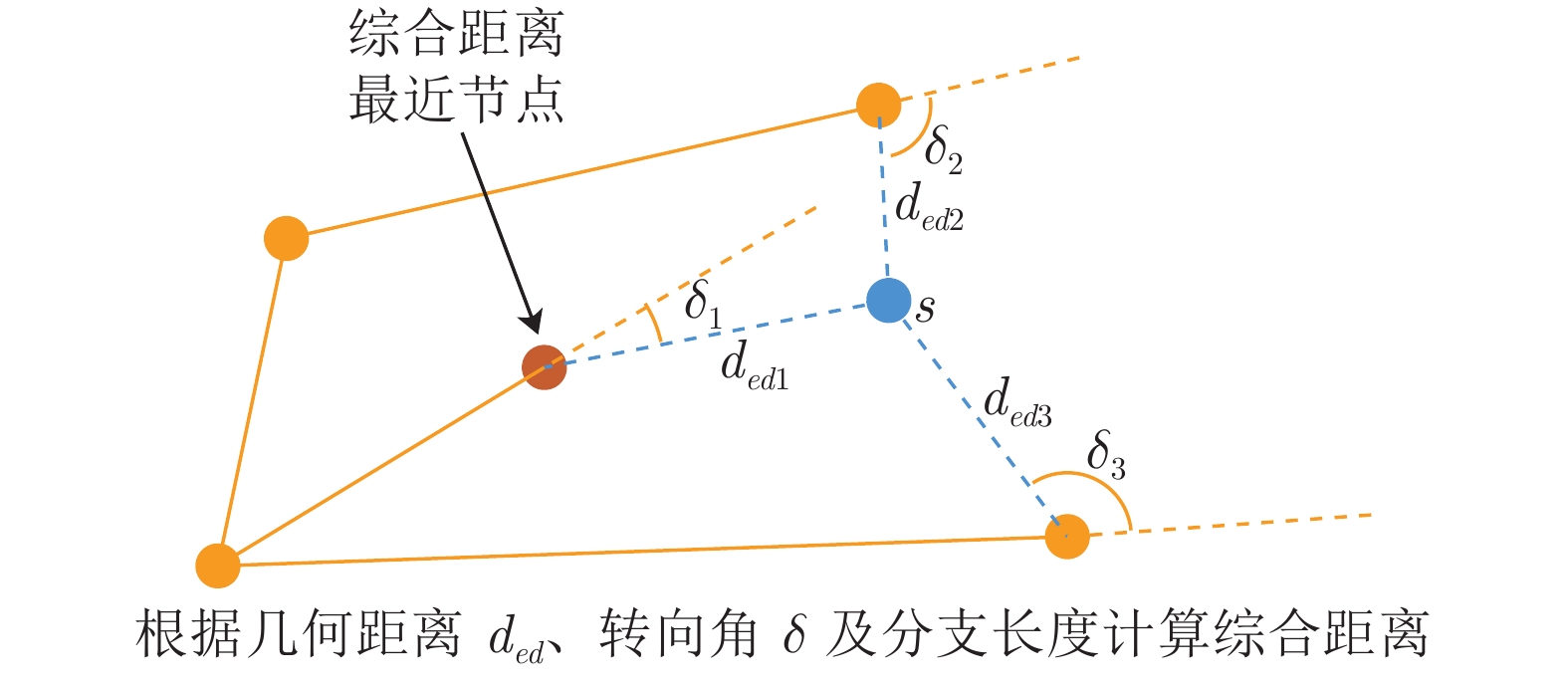
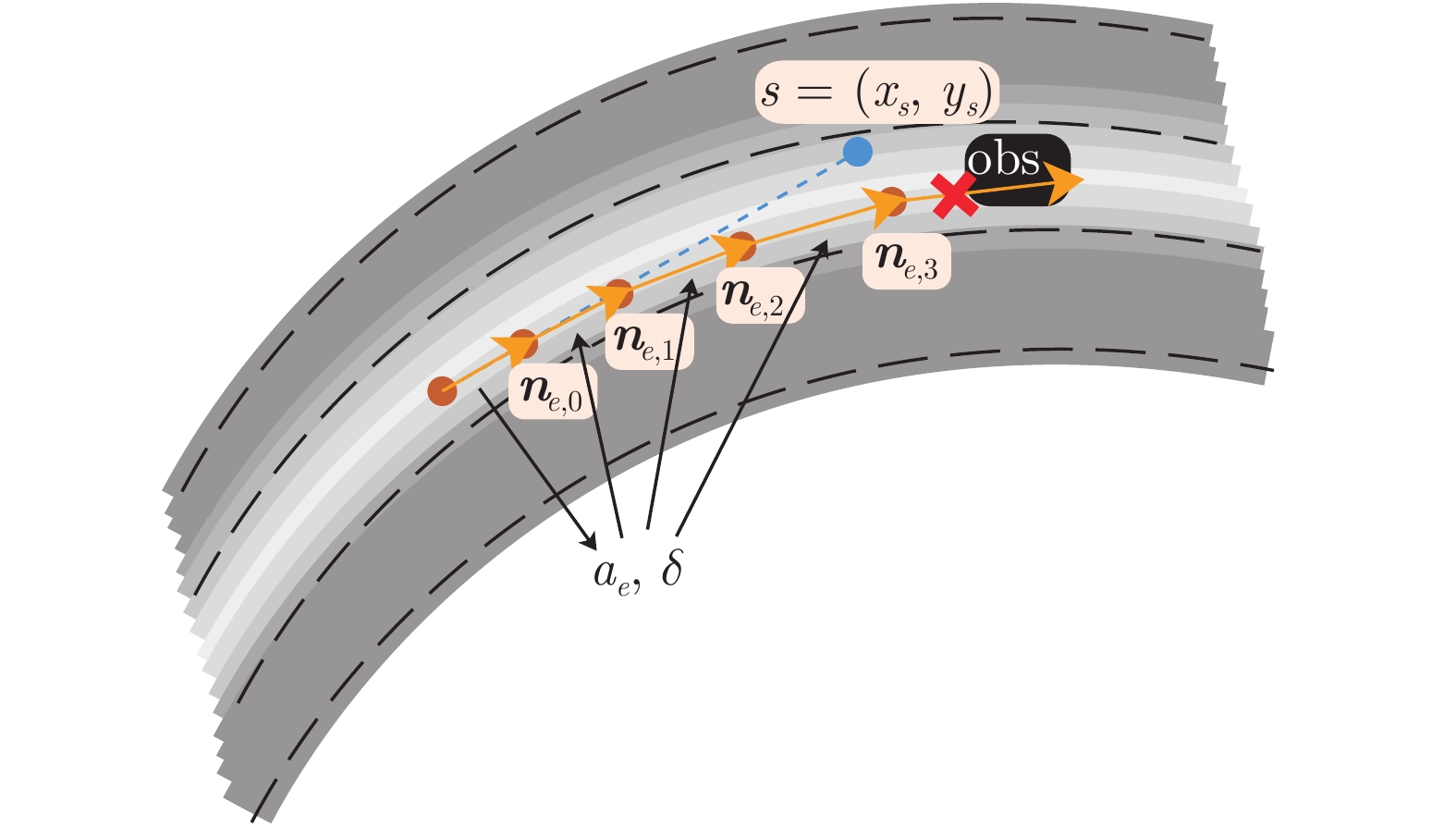
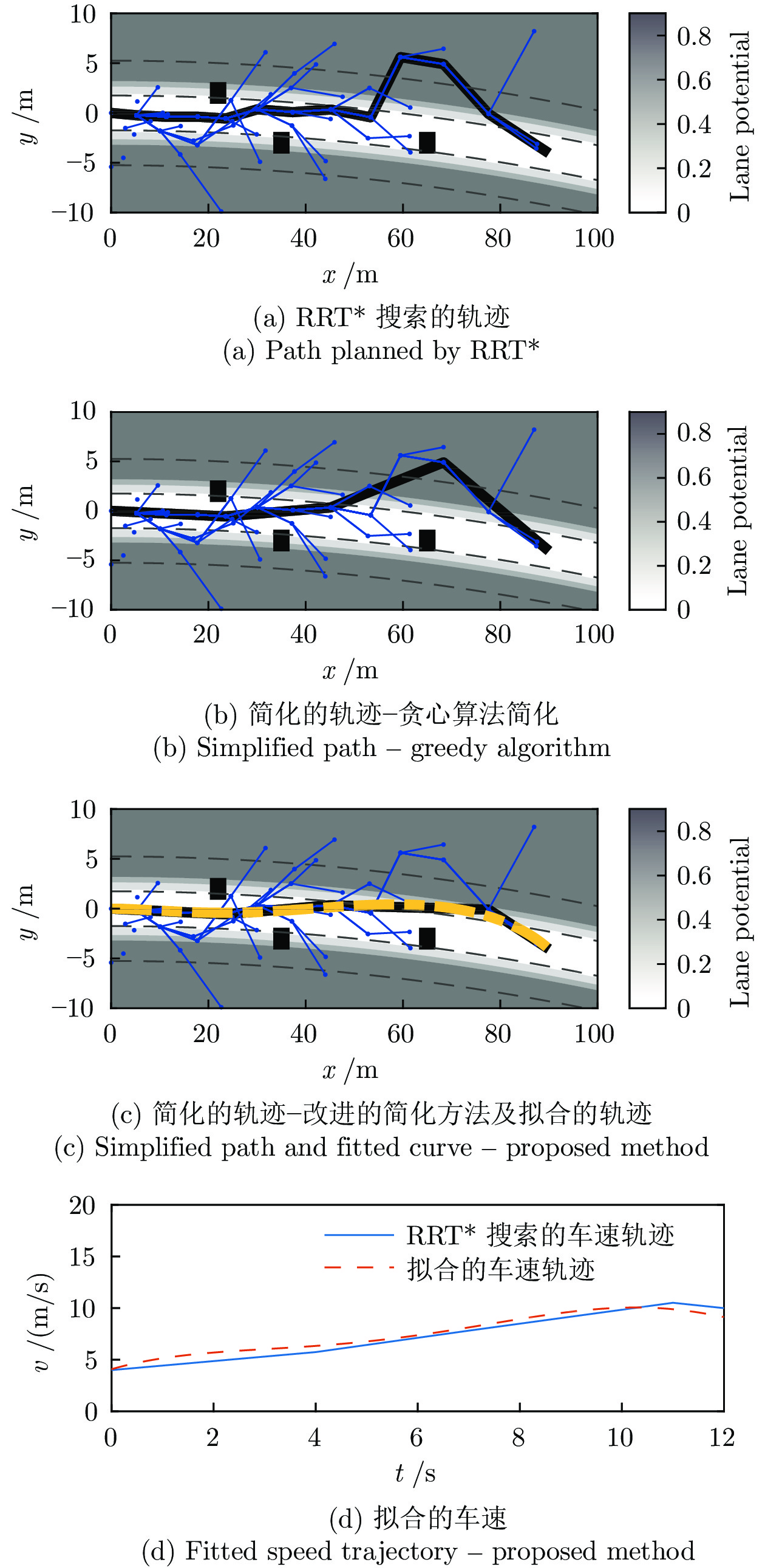
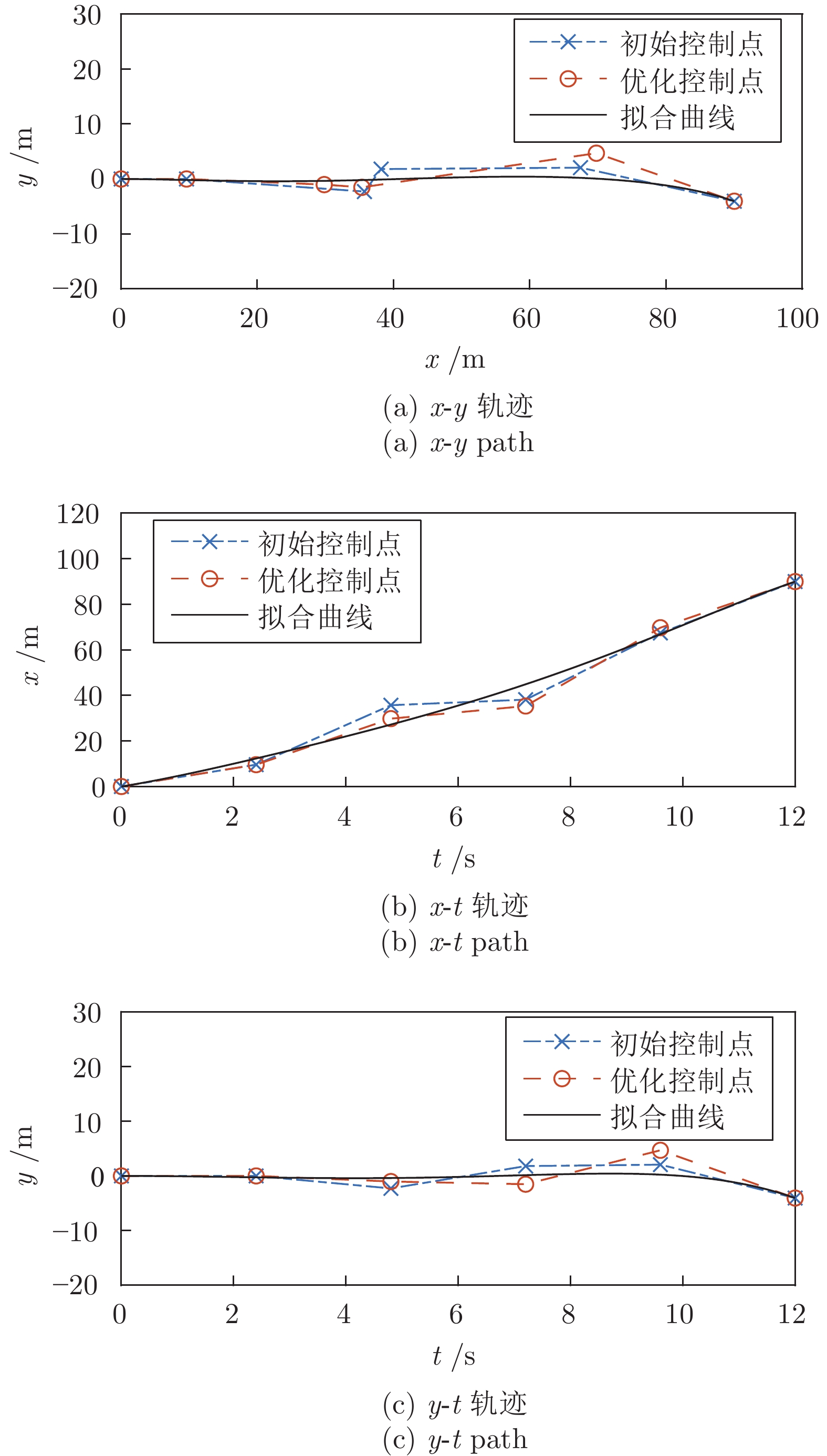
针对传统快速扩展随机树算法 (Rapidly-exploring random tree, RRT)搜索较慢、规划路径曲折、平顺性差等问题, 提出了一种结合改进RRT* 与贝塞尔曲线控制点优化的智能车辆运动规划方法. 该方法通过在给定概率分布下采样, 结合基于方向相似性的多步扩展与路径简化, 使用贝塞尔曲线拟合生成规划问题初始解, 最后使用序列二次规划优化曲线控制点, 从而在动态障碍物环境中生成兼具安全性与驾驶舒适性的车辆行驶轨迹. 在仿真实验中将本文算法与常规RRT及曲线拟合方法进行了比较, 结果显示本文算法在搜索速度、平顺性、安全性等方面有较大提升.
针对传统快速扩展随机树算法 (Rapidly-exploring random tree, RRT)搜索较慢、规划路径曲折、平顺性差等问题, 提出了一种结合改进RRT* 与贝塞尔曲线控制点优化的智能车辆运动规划方法. 该方法通过在给定概率分布下采样, 结合基于方向相似性的多步扩展与路径简化, 使用贝塞尔曲线拟合生成规划问题初始解, 最后使用序列二次规划优化曲线控制点, 从而在动态障碍物环境中生成兼具安全性与驾驶舒适性的车辆行驶轨迹. 在仿真实验中将本文算法与常规RRT及曲线拟合方法进行了比较, 结果显示本文算法在搜索速度、平顺性、安全性等方面有较大提升.



2022, 48(12): 2951-2959.
doi: 10.16383/j.aas.c190805
摘要:
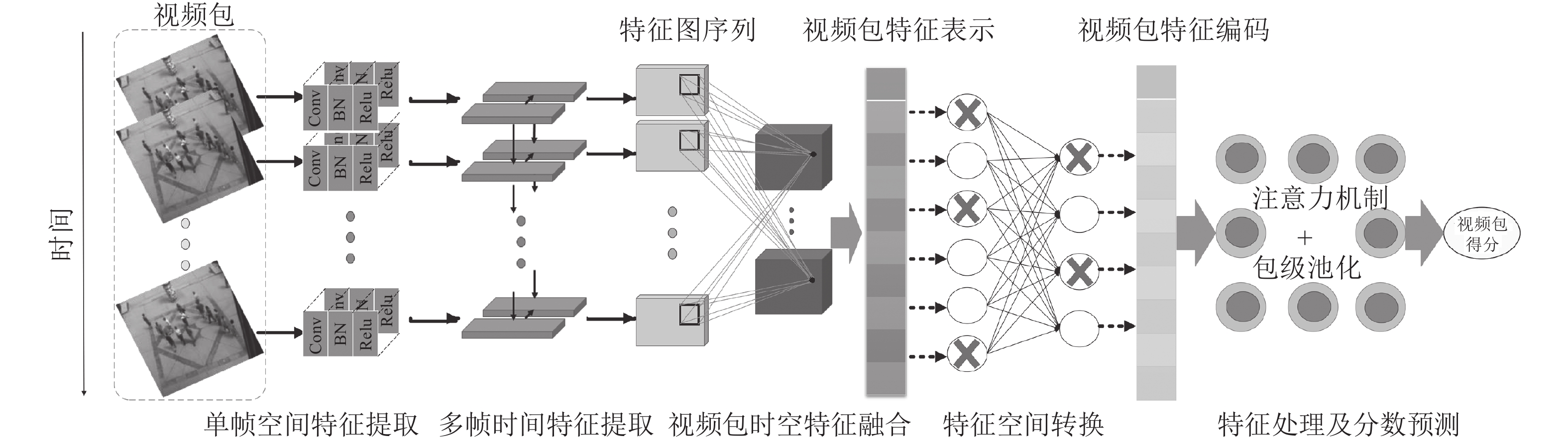
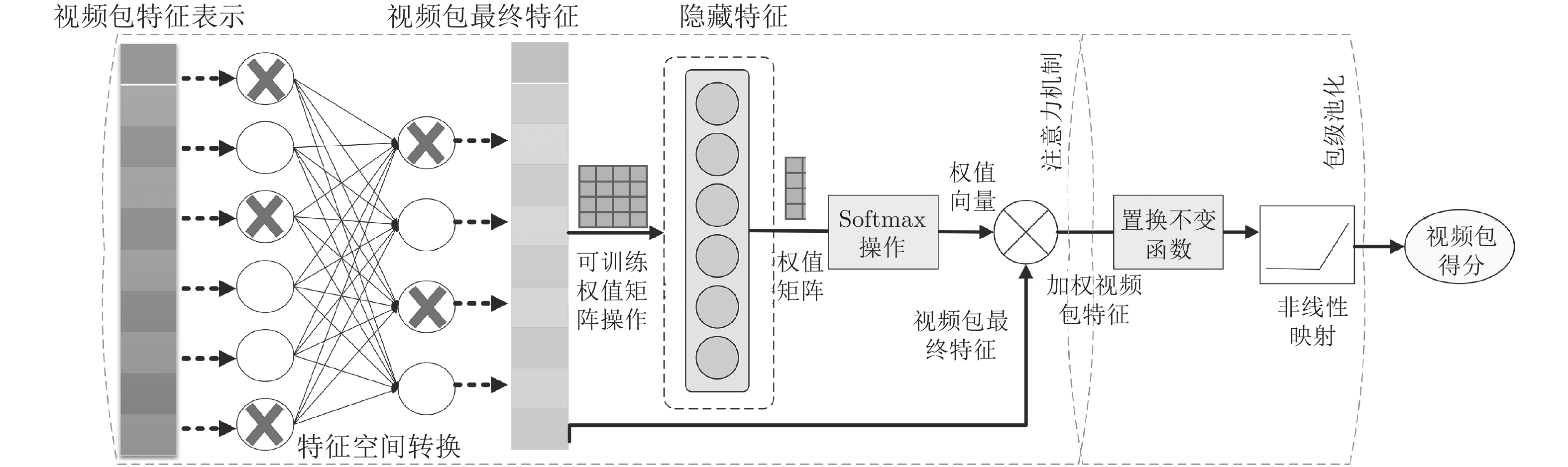
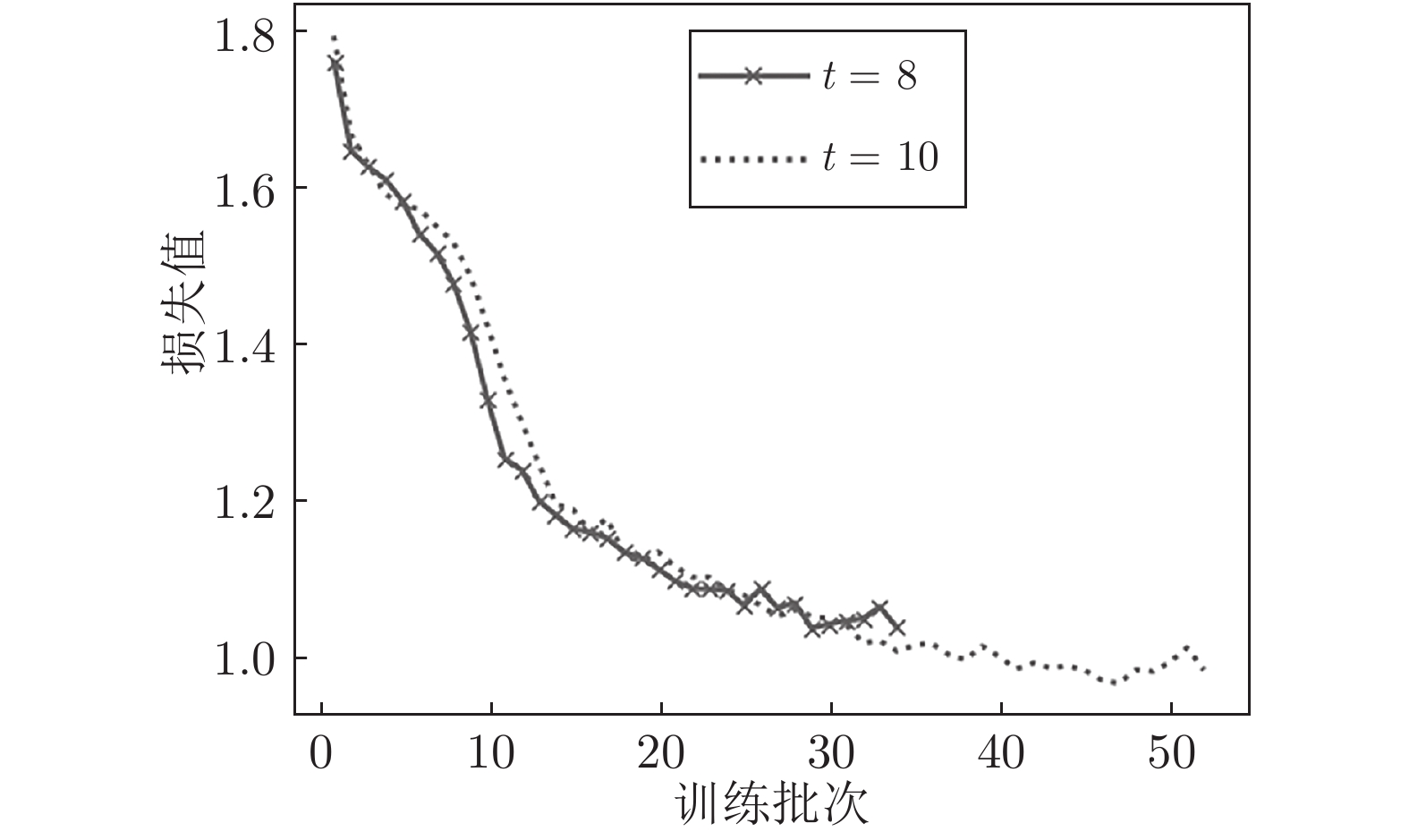
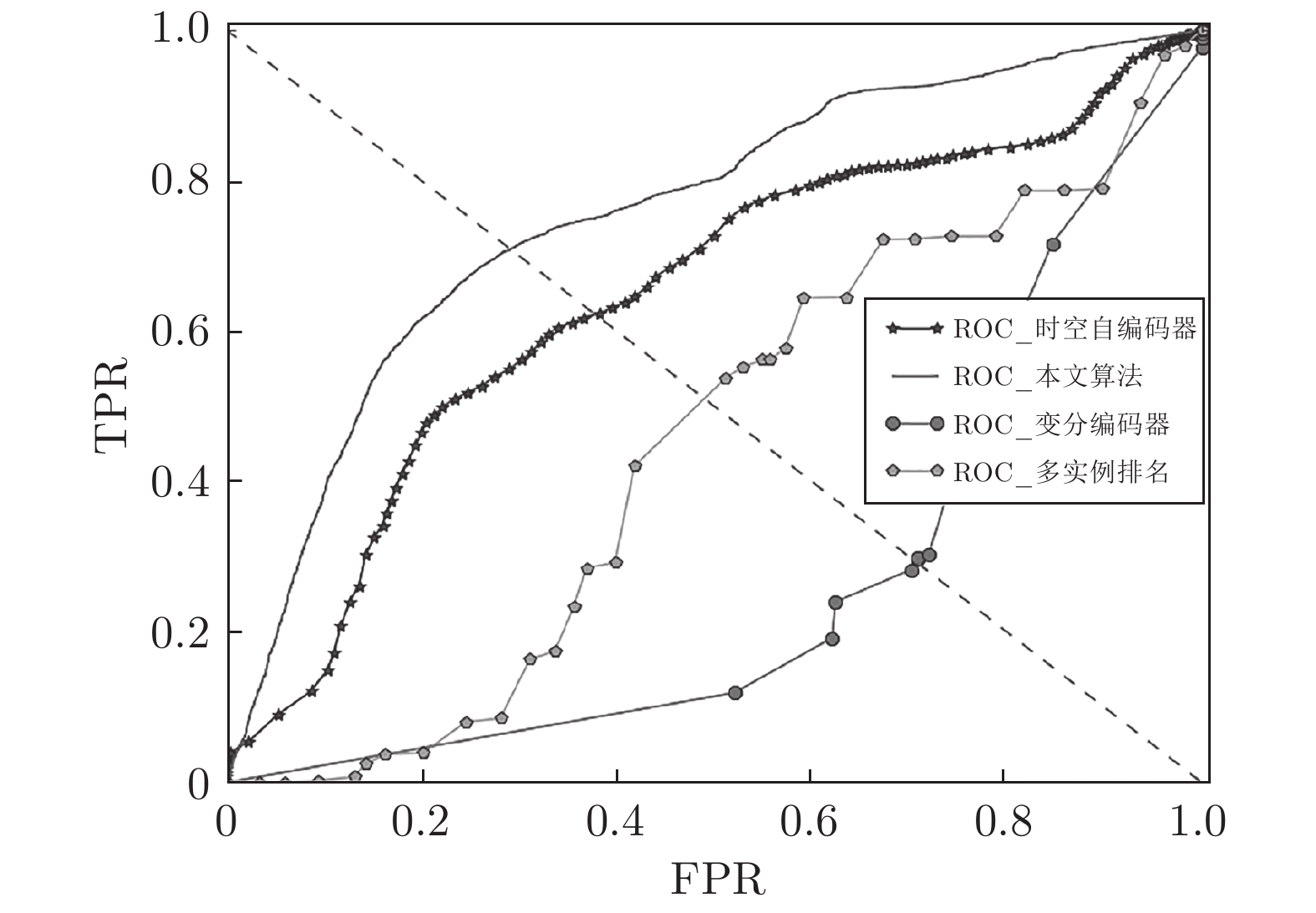
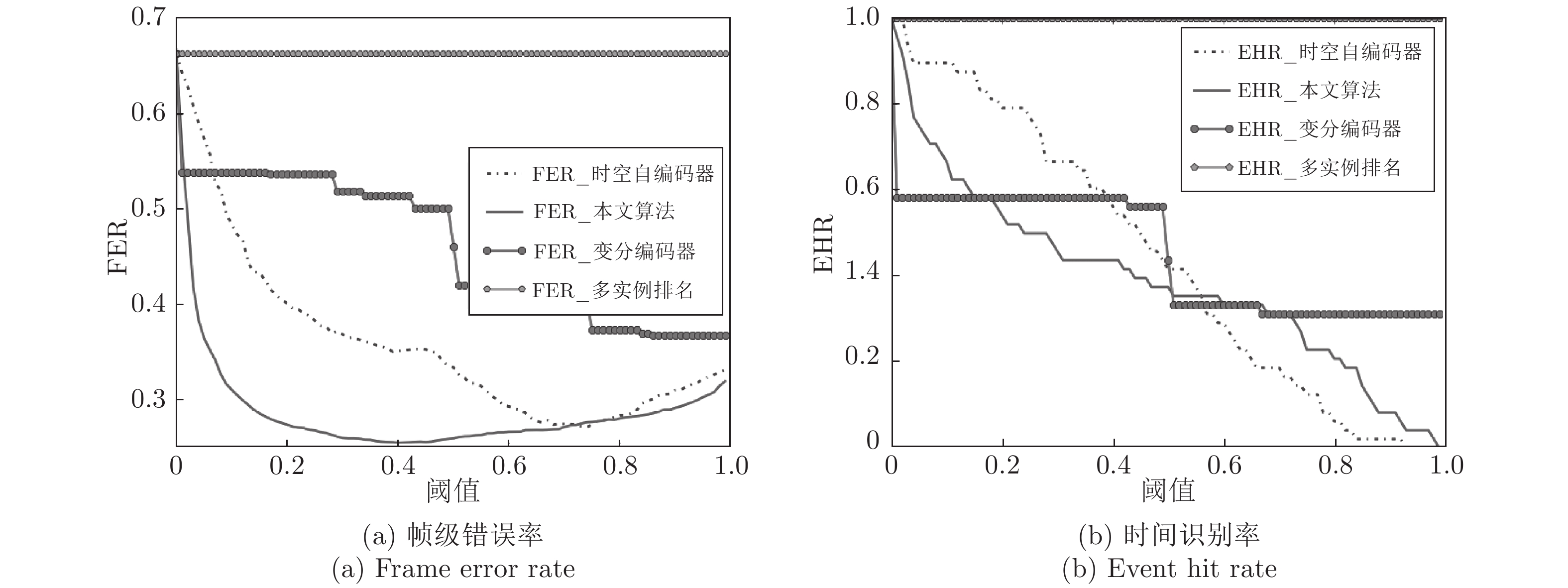
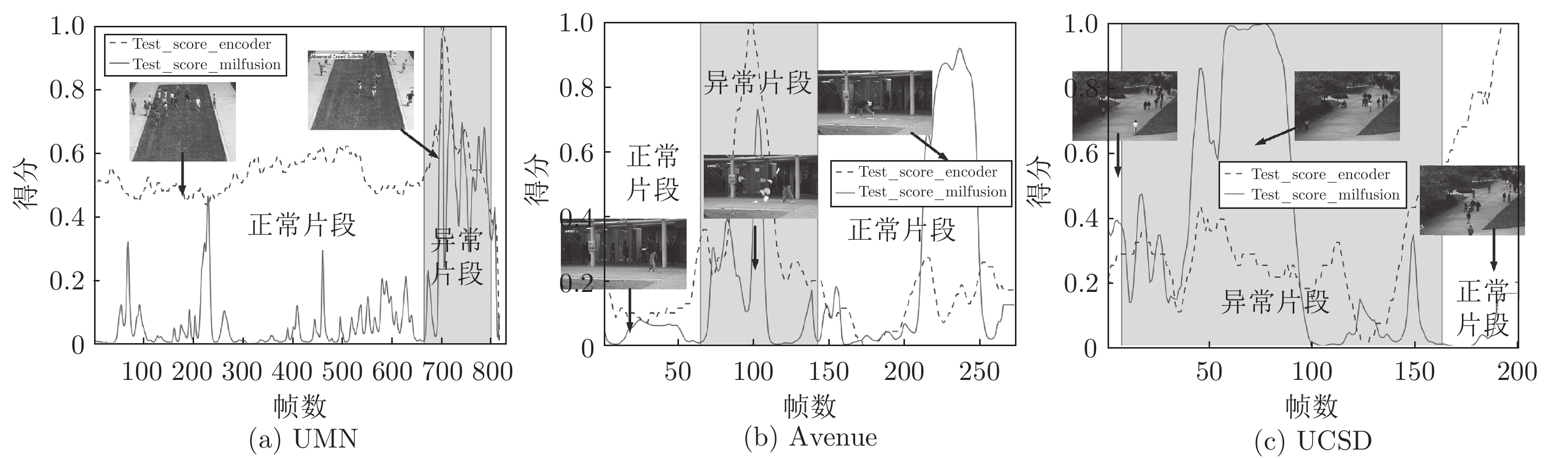
针对监控视频中行人非正常行走状态的异常现象, 提出了一个端到端的异常行为检测网络, 以视频包为输入, 输出异常得分. 时空编码器提取视频包时空特征后, 利用基于隐向量的注意力机制对包级特征进行加权处理, 最后用包级池化映射出视频包得分. 本文整合了4个常用的异常行为检测数据集, 在整合数据集上进行算法测试并与其他异常检测算法进行对比. 多项客观指标结果显示, 本文算法在异常事件检测方面有着显著的优势.
针对监控视频中行人非正常行走状态的异常现象, 提出了一个端到端的异常行为检测网络, 以视频包为输入, 输出异常得分. 时空编码器提取视频包时空特征后, 利用基于隐向量的注意力机制对包级特征进行加权处理, 最后用包级池化映射出视频包得分. 本文整合了4个常用的异常行为检测数据集, 在整合数据集上进行算法测试并与其他异常检测算法进行对比. 多项客观指标结果显示, 本文算法在异常事件检测方面有着显著的优势.


2022, 48(12): 2960-2971.
doi: 10.16383/j.aas.c190636
摘要:
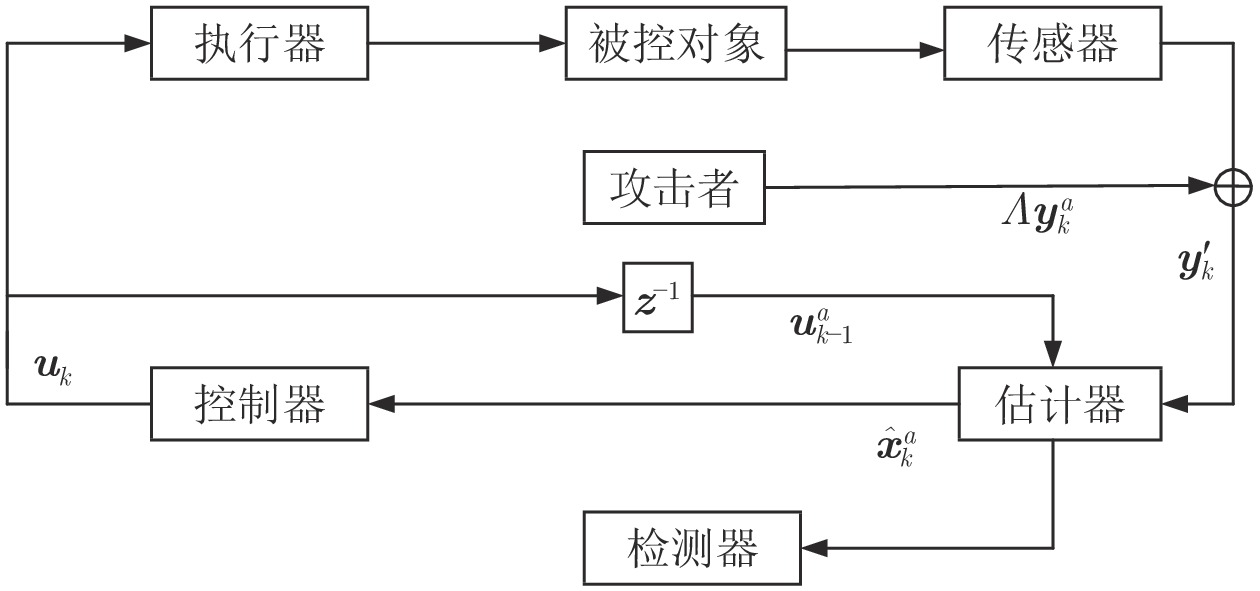
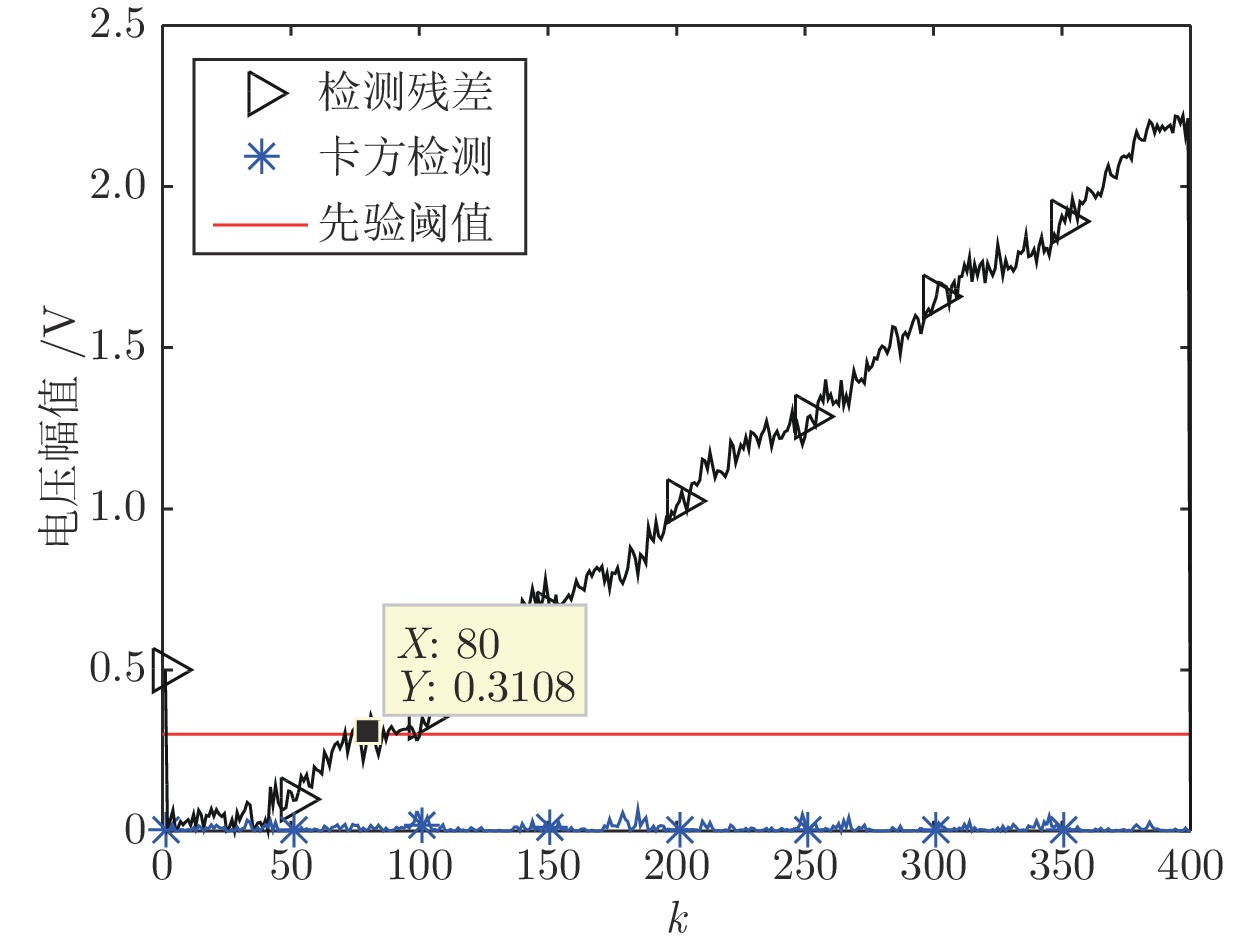
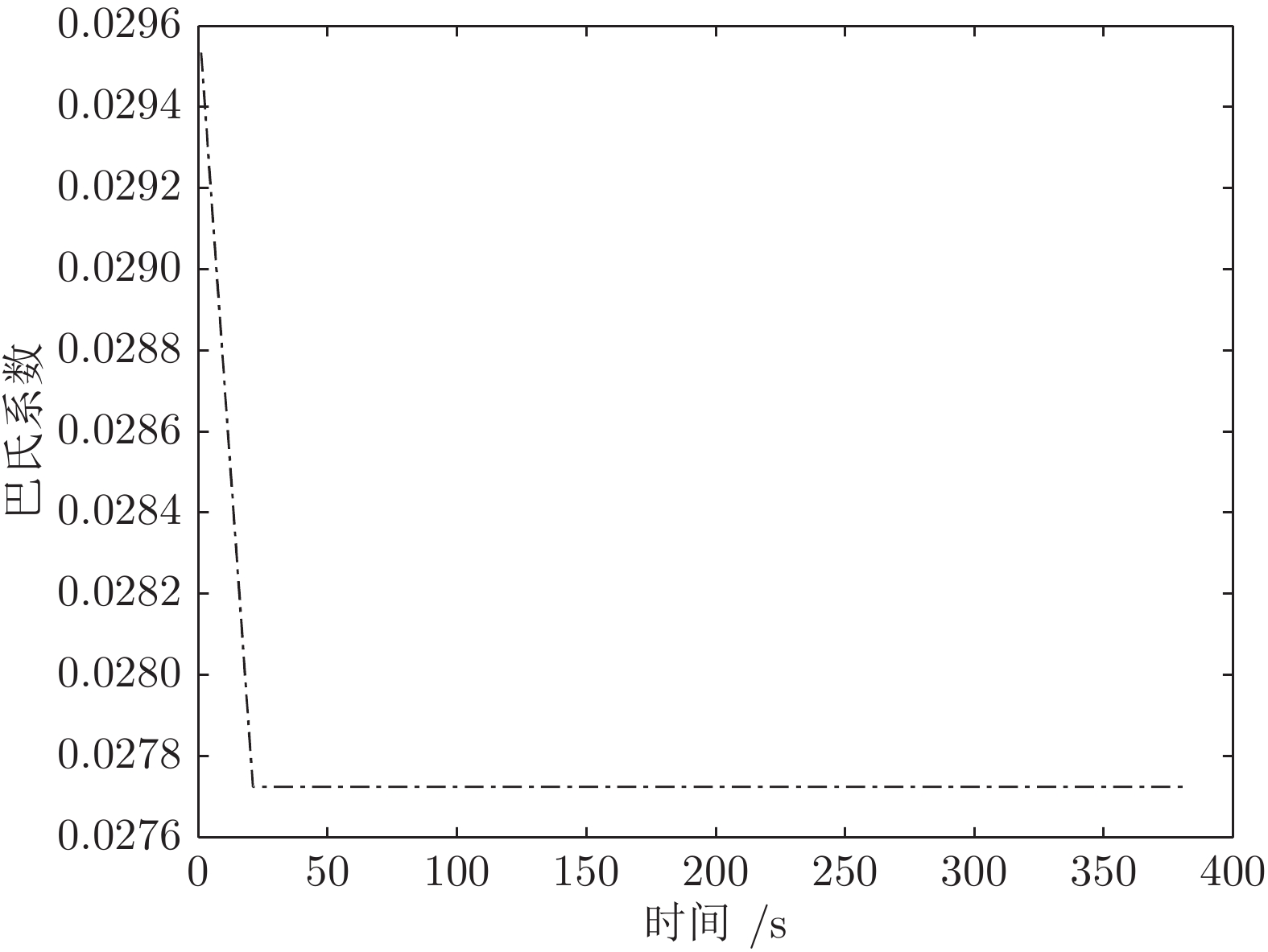
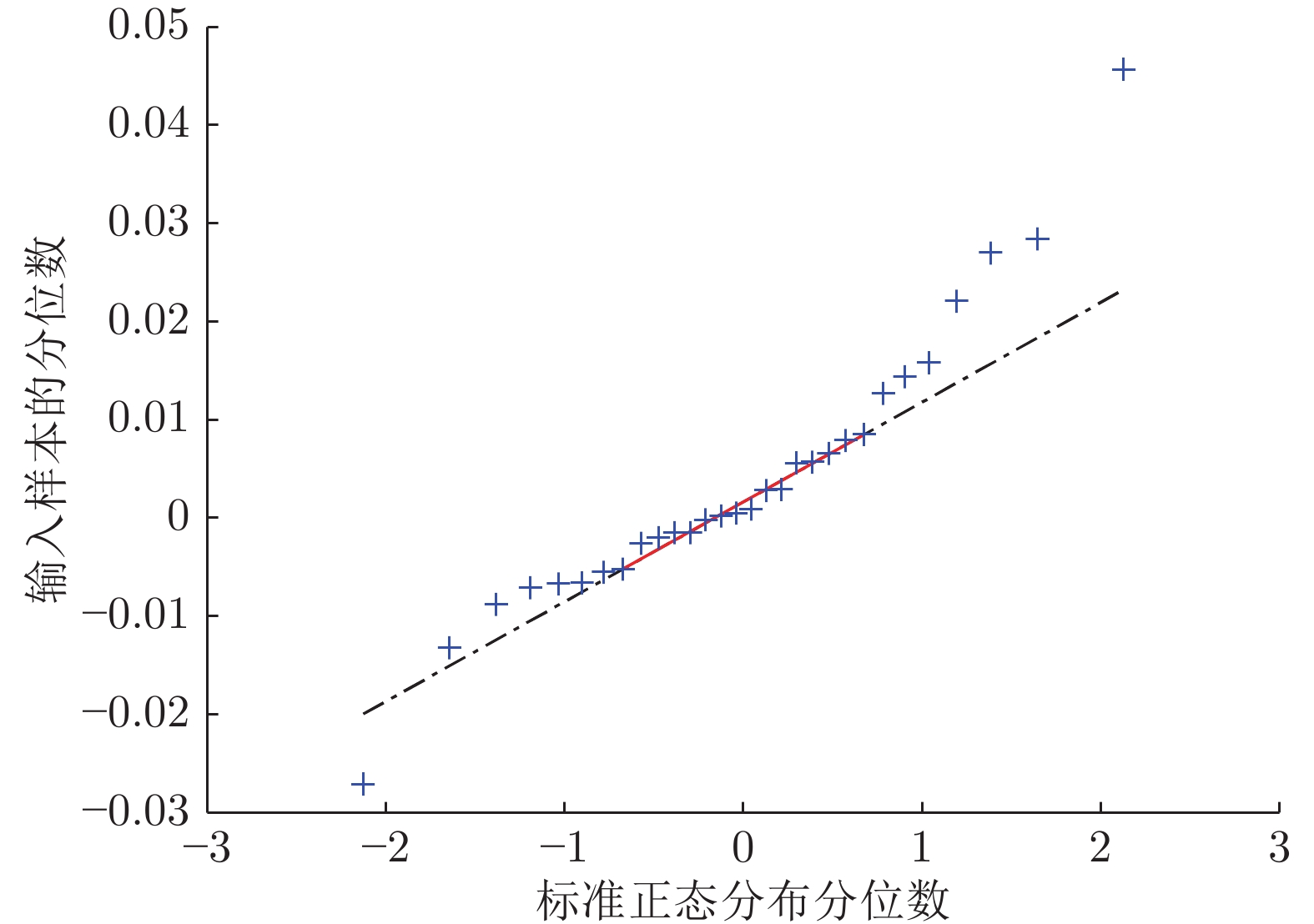
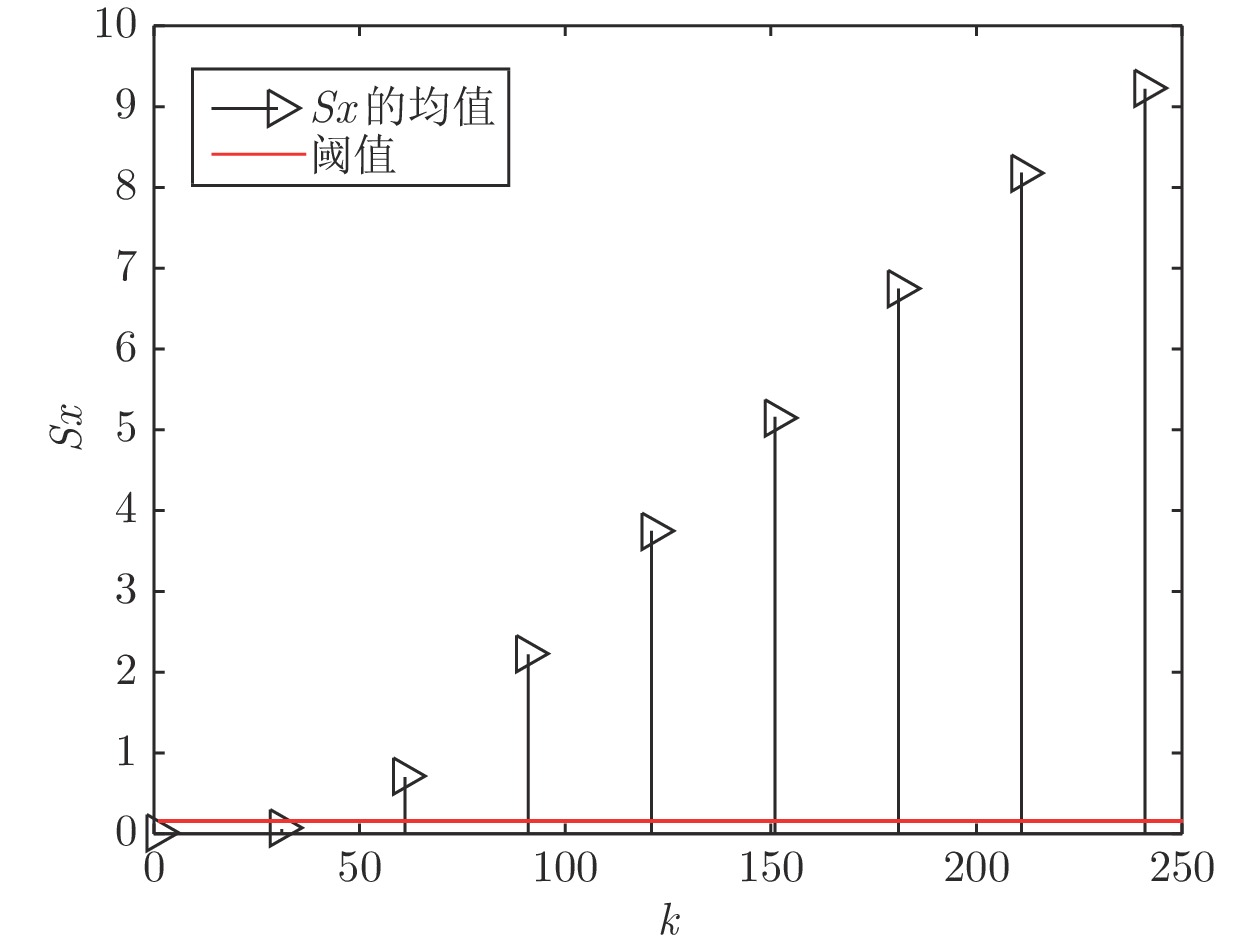
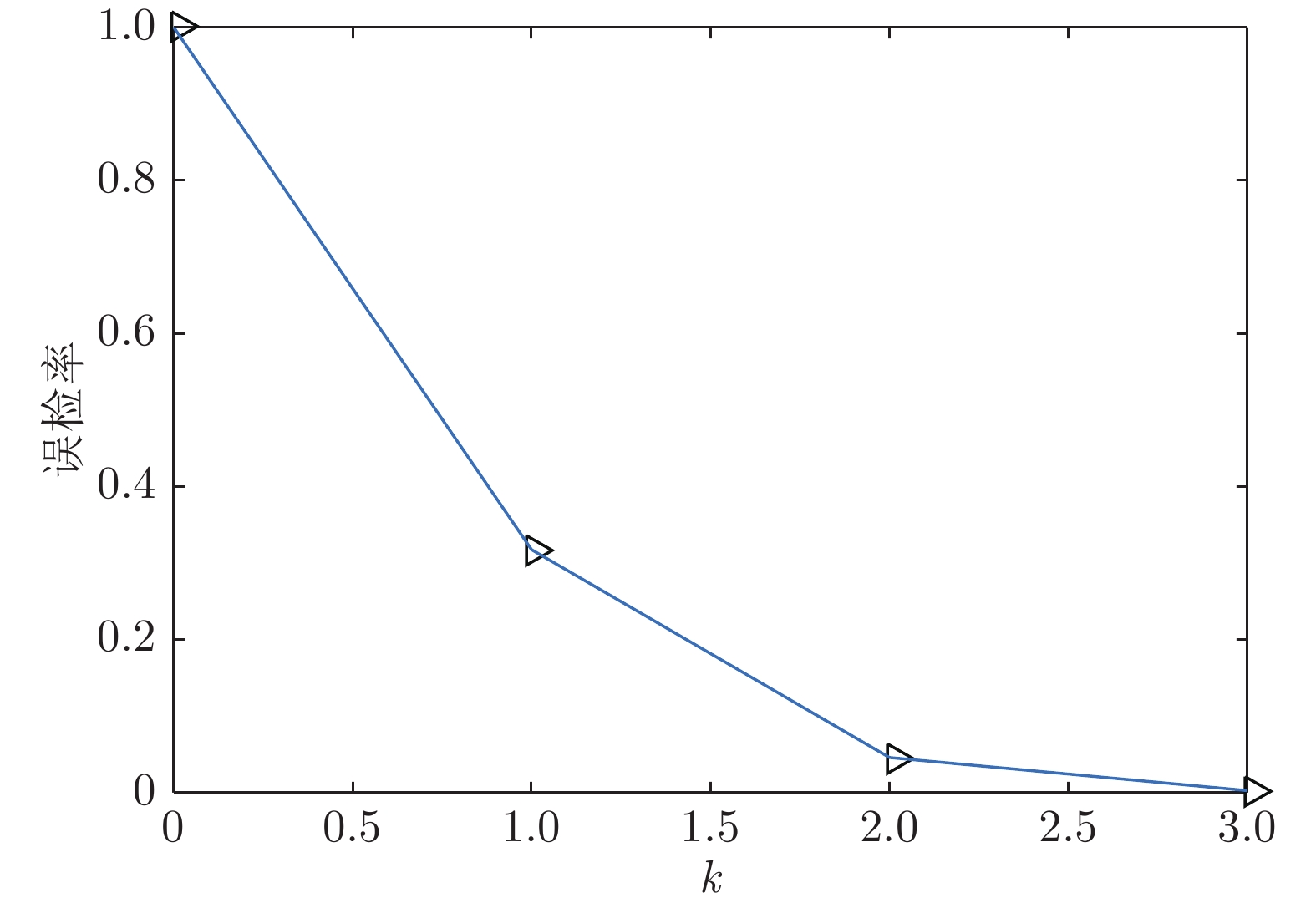
研究了一种针对智能电网中假数据注入攻击的有效检测方法. 假数据注入攻击可以保持攻击前后残差基本不变, 绕过传统的不良数据检测技术. 首先基于电网模型, 分析了假数据注入攻击的攻击特性, 针对噪声统计特性未知且无迹Kalman滤波 (Unscented Kalman filter, UKF) 不稳定的现象, 提出了自适应平方根无迹Kalman滤波改进算法. 基于状态估计值, 结合中心极限定理提出检测算法, 并与欧几里得检测方法、巴氏系数检测方法进行比较. 最后, 仿真表明本文所提检测算法的优越性.
研究了一种针对智能电网中假数据注入攻击的有效检测方法. 假数据注入攻击可以保持攻击前后残差基本不变, 绕过传统的不良数据检测技术. 首先基于电网模型, 分析了假数据注入攻击的攻击特性, 针对噪声统计特性未知且无迹Kalman滤波 (Unscented Kalman filter, UKF) 不稳定的现象, 提出了自适应平方根无迹Kalman滤波改进算法. 基于状态估计值, 结合中心极限定理提出检测算法, 并与欧几里得检测方法、巴氏系数检测方法进行比较. 最后, 仿真表明本文所提检测算法的优越性.

2022, 48(12): 2972-2980.
doi: 10.16383/j.aas.c190590
摘要:
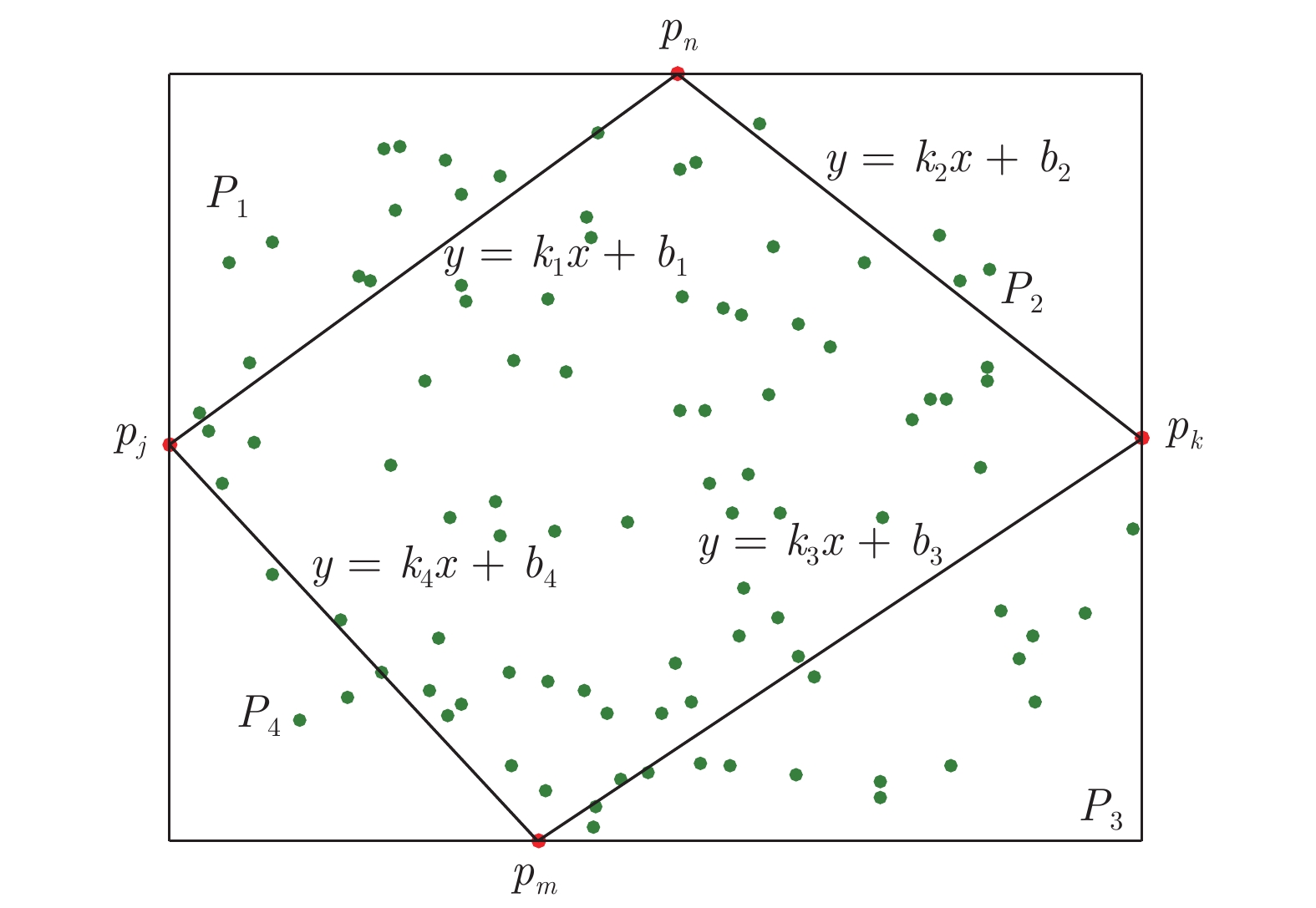
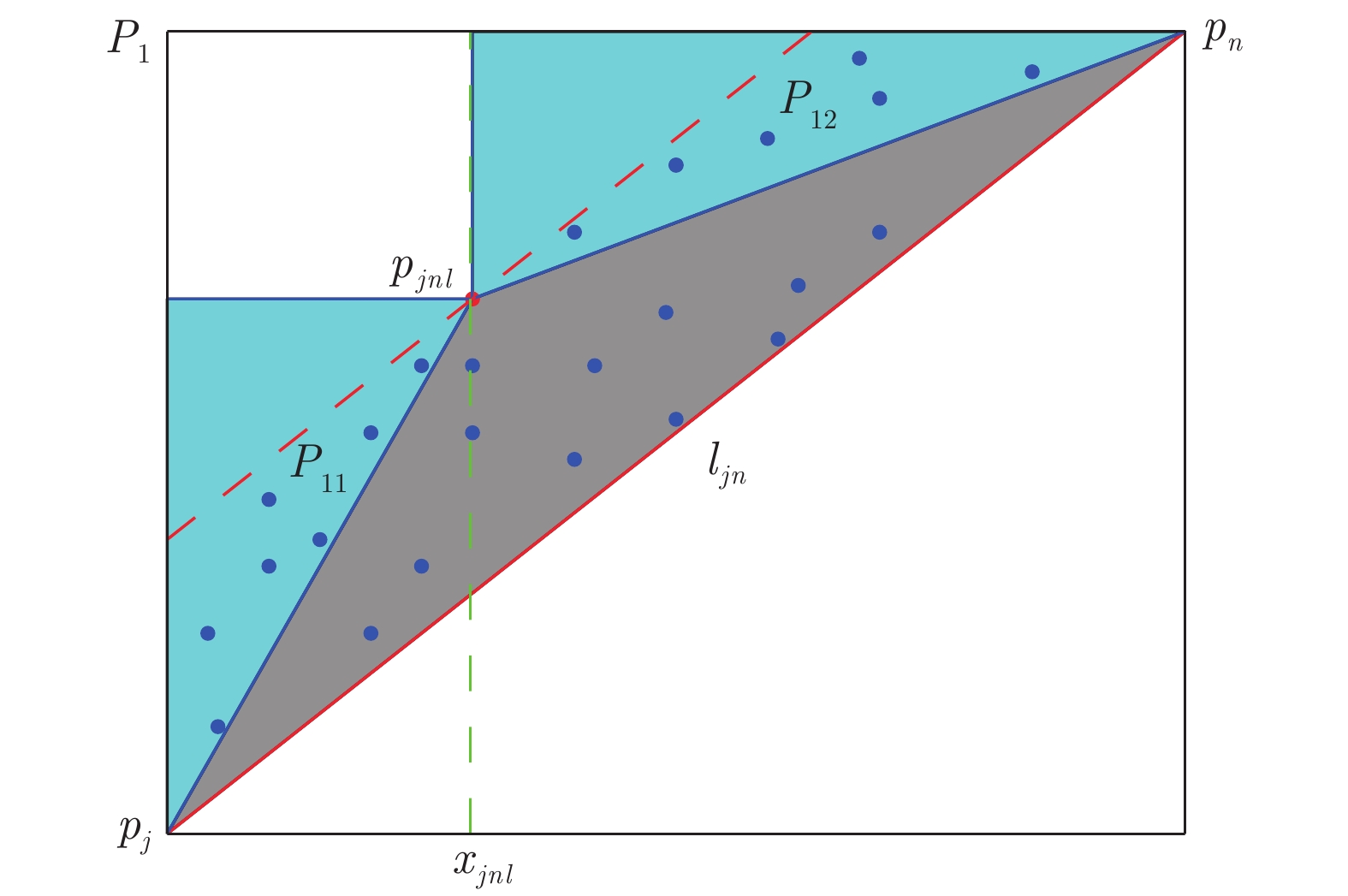
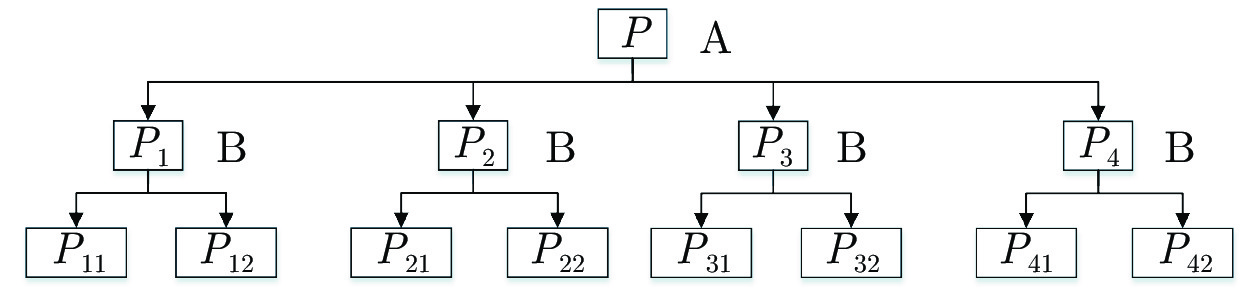
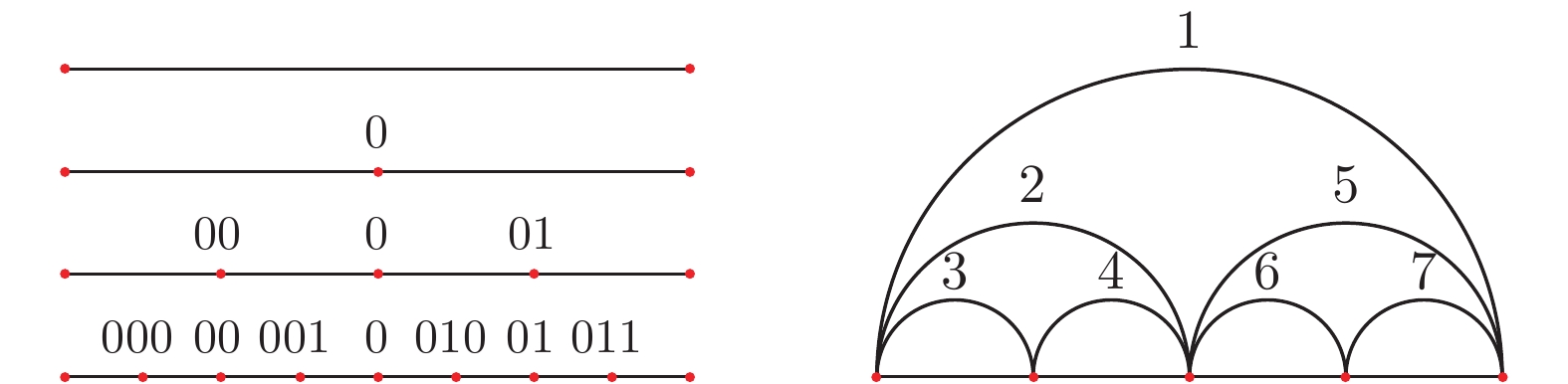
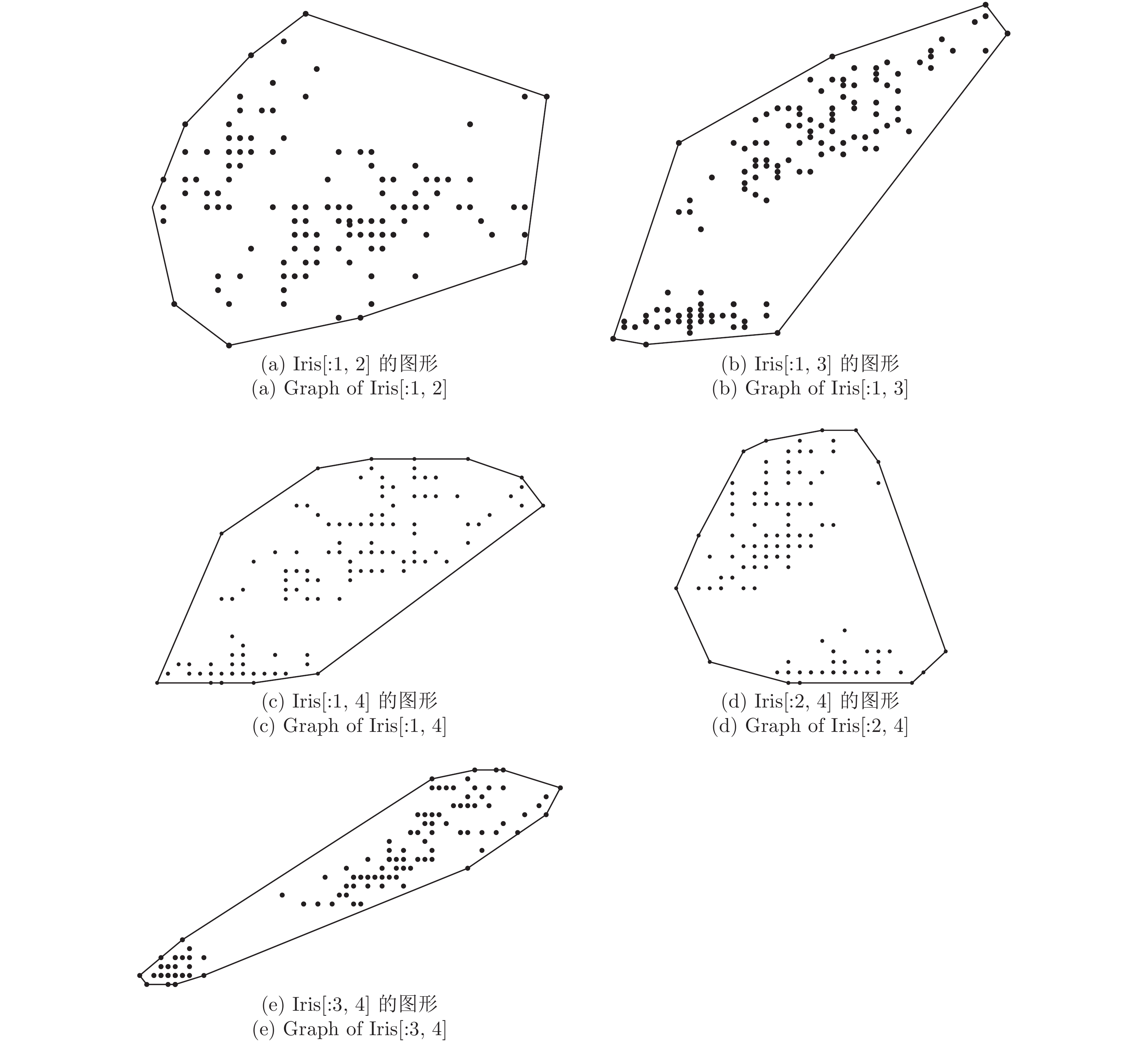
为解决实际工程应用中具有超大规模的平面点集的凸包计算问题, 提出了一种基于点集所在区域正交化分割的新算法. 利用点集几何结构的部分极点对平面点集进行正交化分割, 以获取不相干的点集子集簇, 再对所有点集子集分别计算其凸包极点, 最后合并极点得到凸包点集. 在不同层级的正交化分割过程中, 根据已知极点的信息, 逐层舍去对于凸包极点生成没有贡献的无效点, 进而提高算法运行效率. 在与目前常用凸包算法的对比实验中, 该算法处理超大规模的平面点集时稳定性高且速度更快.
为解决实际工程应用中具有超大规模的平面点集的凸包计算问题, 提出了一种基于点集所在区域正交化分割的新算法. 利用点集几何结构的部分极点对平面点集进行正交化分割, 以获取不相干的点集子集簇, 再对所有点集子集分别计算其凸包极点, 最后合并极点得到凸包点集. 在不同层级的正交化分割过程中, 根据已知极点的信息, 逐层舍去对于凸包极点生成没有贡献的无效点, 进而提高算法运行效率. 在与目前常用凸包算法的对比实验中, 该算法处理超大规模的平面点集时稳定性高且速度更快.

2022, 48(12): 2981-2995.
doi: 10.16383/j.aas.c190417
摘要:
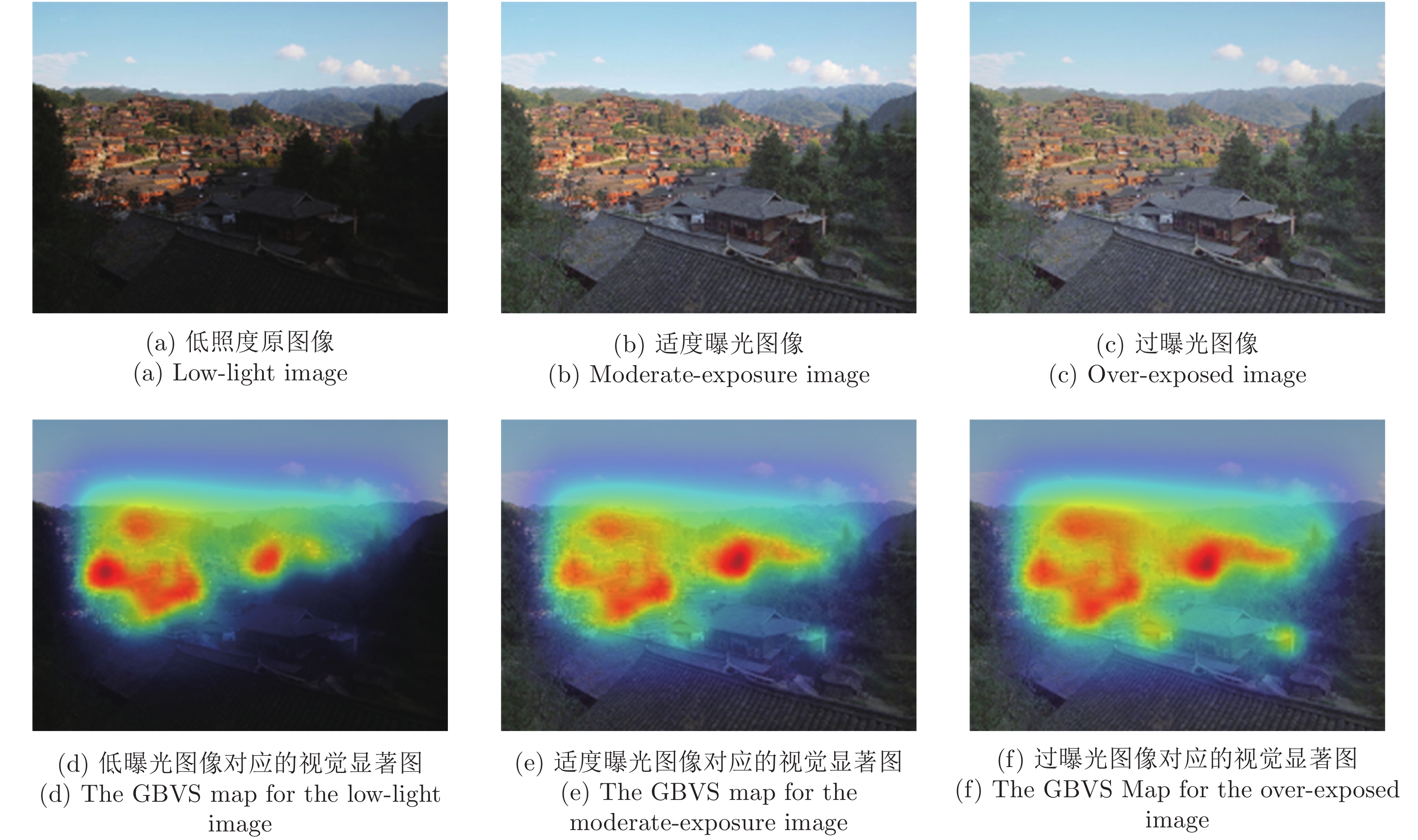
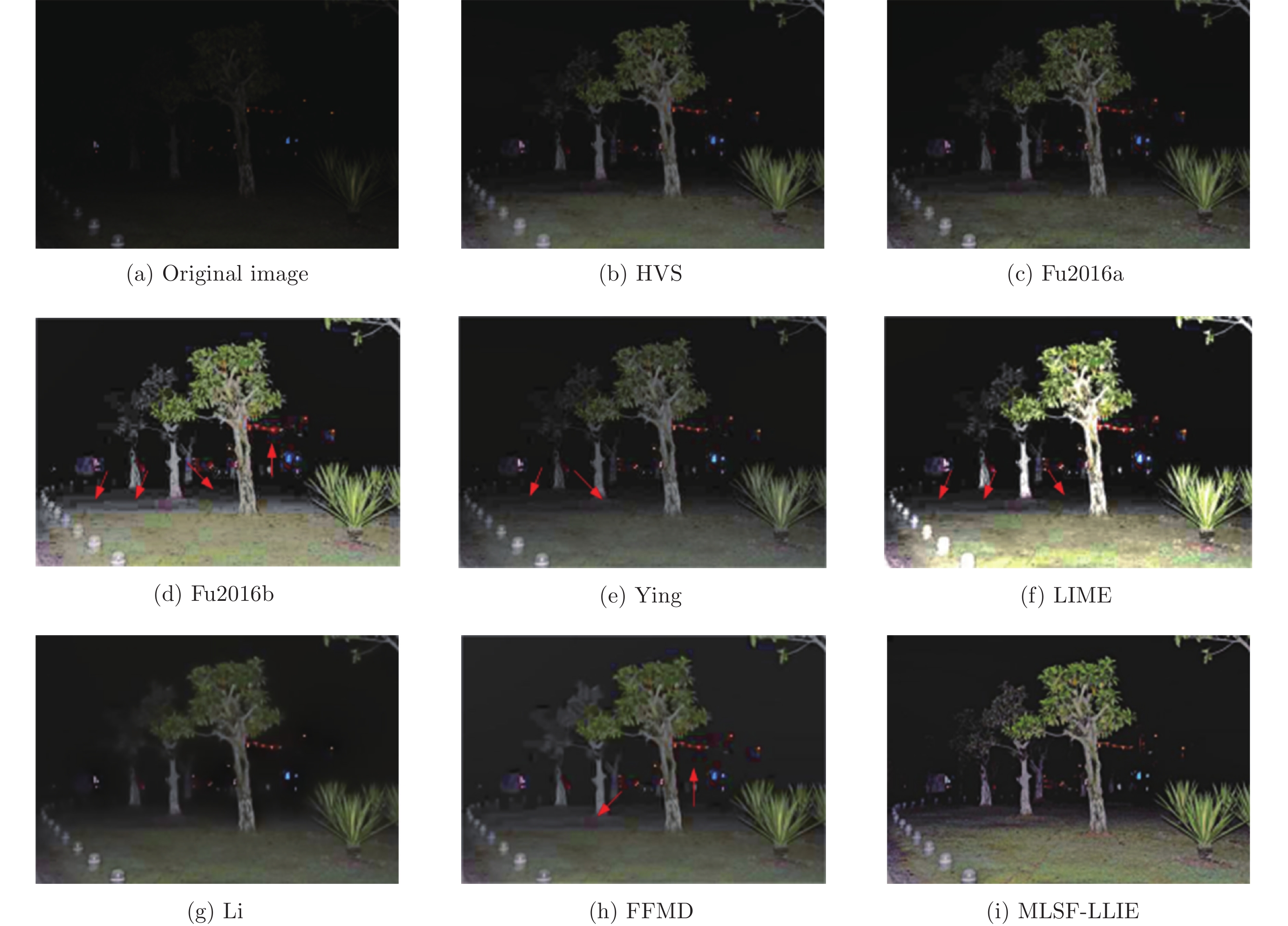
为将低照度图像及基于它生成的多个不同曝光度图像中的互补性信息进行最佳融合以获得更为鲁棒的视觉增强效果, 提出了一种基于多图像局部结构化融合的两阶段低照度图像增强(Low-light image enhancement, LLIE)算法. 在待融合图像制备阶段, 提出了一种基于图像质量评价的最佳曝光度预测模型, 利用该预测模型给出的关于低照度图像最佳曝光度值, 在伪曝光模型下生成适度增强图像和过曝光图像 (利用比最佳曝光度值更高的曝光度生成)各一幅. 同时, 利用经典Retinex模型生成一幅适度增强图像作为补充图像参与融合. 在融合阶段, 首先将低照度图像、适度增强图像(2幅)和过曝光图像在同一空间位置处的图块矢量化后分解为对比度、结构强度和亮度三个分量. 之后, 以所有待融合对比度分量中的最高值作为融合后的对比度分量值, 而结构强度和亮度分量则分别以相位一致性映射图和视觉显著度映射图作为加权系数完成加权融合. 然后, 将分别融合后的对比度、纹理结构和亮度三个分量重构为图块, 并重新置回融合后图像中的相应位置. 最后, 在噪声水平评估算法导引下自适应调用降噪算法完成后处理. 实验结果表明: 所提出的低照度图像增强算法在主客观图像质量评价上优于现有大多数主流算法.
为将低照度图像及基于它生成的多个不同曝光度图像中的互补性信息进行最佳融合以获得更为鲁棒的视觉增强效果, 提出了一种基于多图像局部结构化融合的两阶段低照度图像增强(Low-light image enhancement, LLIE)算法. 在待融合图像制备阶段, 提出了一种基于图像质量评价的最佳曝光度预测模型, 利用该预测模型给出的关于低照度图像最佳曝光度值, 在伪曝光模型下生成适度增强图像和过曝光图像 (利用比最佳曝光度值更高的曝光度生成)各一幅. 同时, 利用经典Retinex模型生成一幅适度增强图像作为补充图像参与融合. 在融合阶段, 首先将低照度图像、适度增强图像(2幅)和过曝光图像在同一空间位置处的图块矢量化后分解为对比度、结构强度和亮度三个分量. 之后, 以所有待融合对比度分量中的最高值作为融合后的对比度分量值, 而结构强度和亮度分量则分别以相位一致性映射图和视觉显著度映射图作为加权系数完成加权融合. 然后, 将分别融合后的对比度、纹理结构和亮度三个分量重构为图块, 并重新置回融合后图像中的相应位置. 最后, 在噪声水平评估算法导引下自适应调用降噪算法完成后处理. 实验结果表明: 所提出的低照度图像增强算法在主客观图像质量评价上优于现有大多数主流算法.






2022, 48(12): 2996-3005.
doi: 10.16383/j.aas.c190849
摘要:
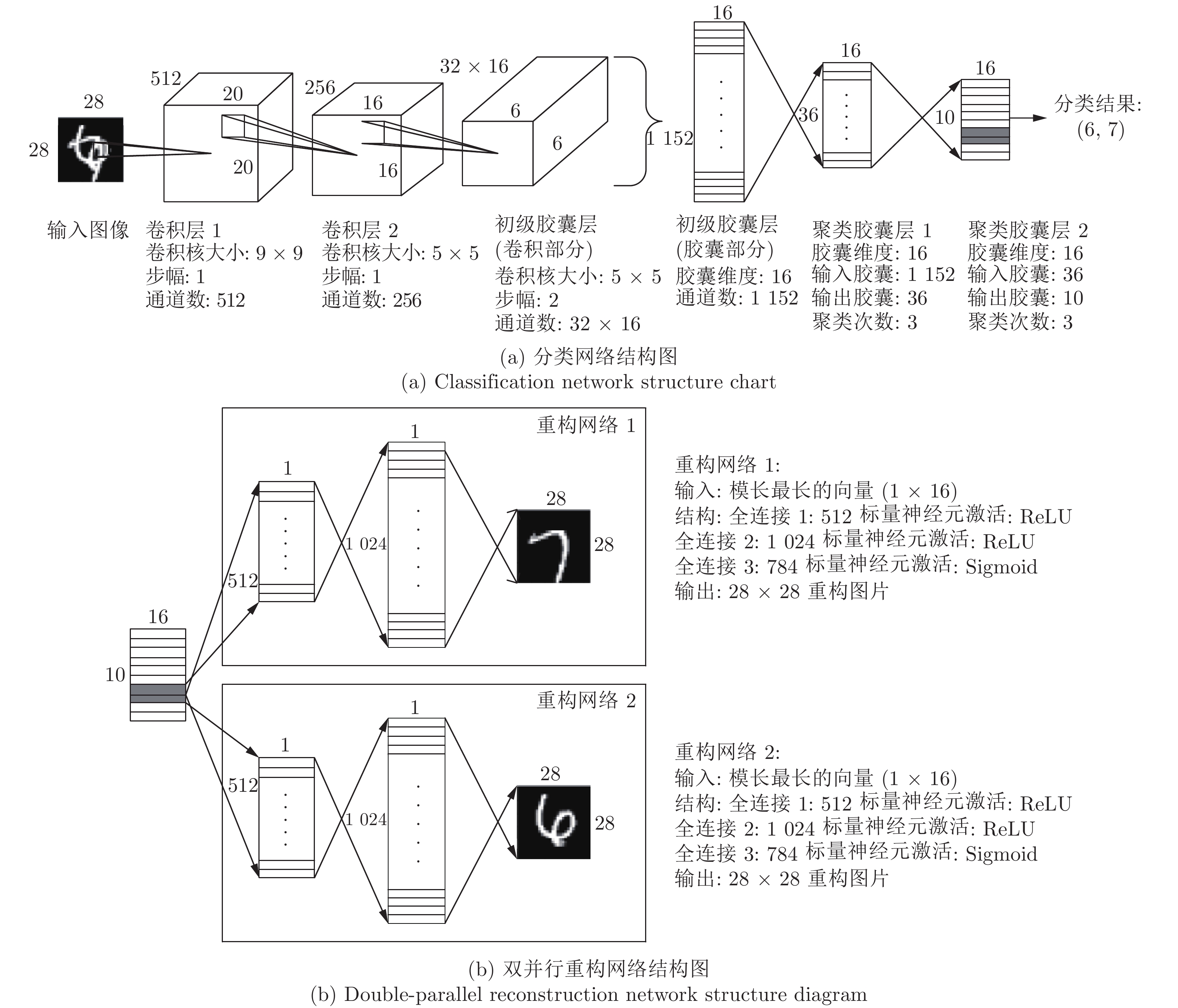
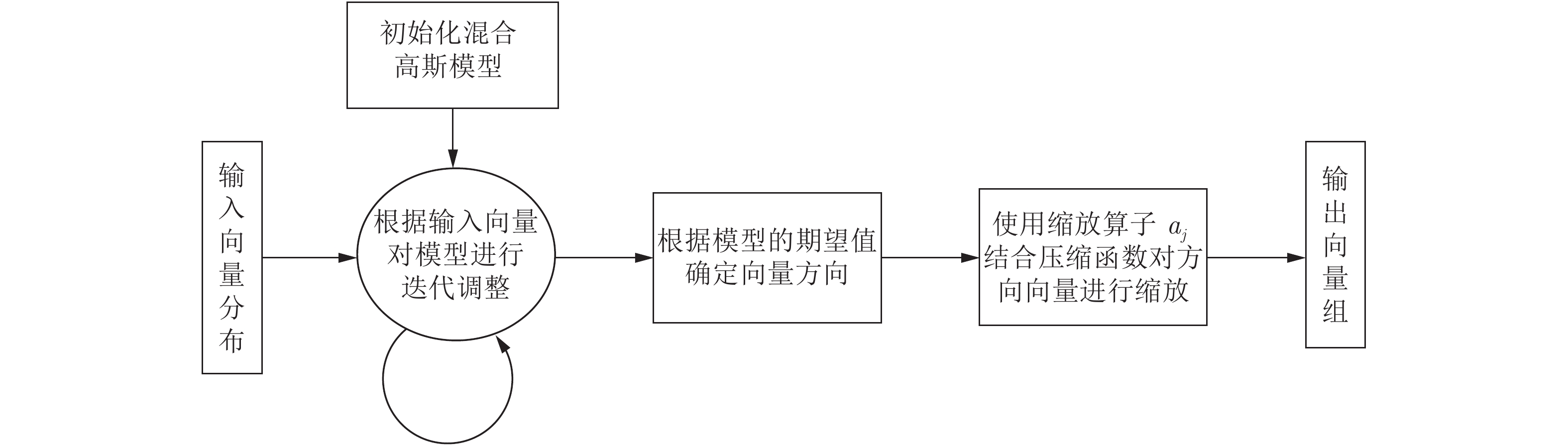
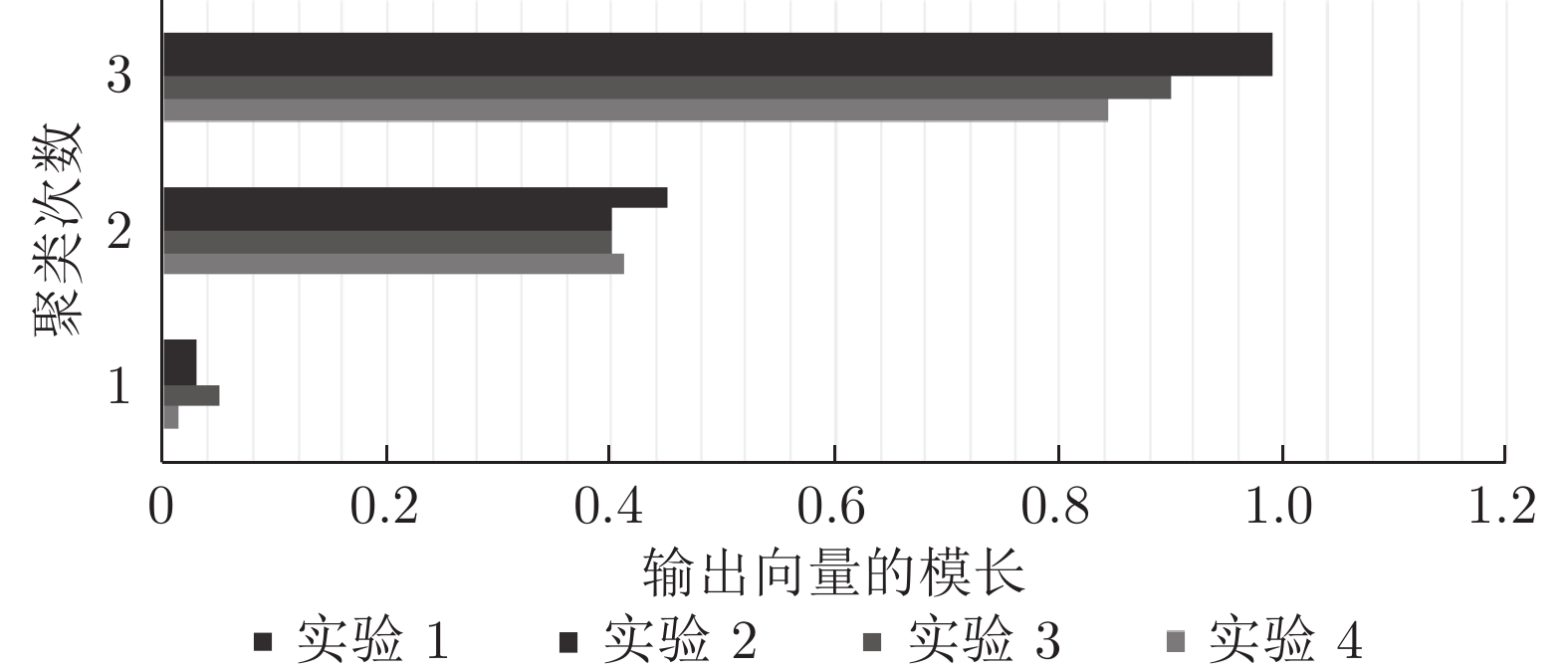
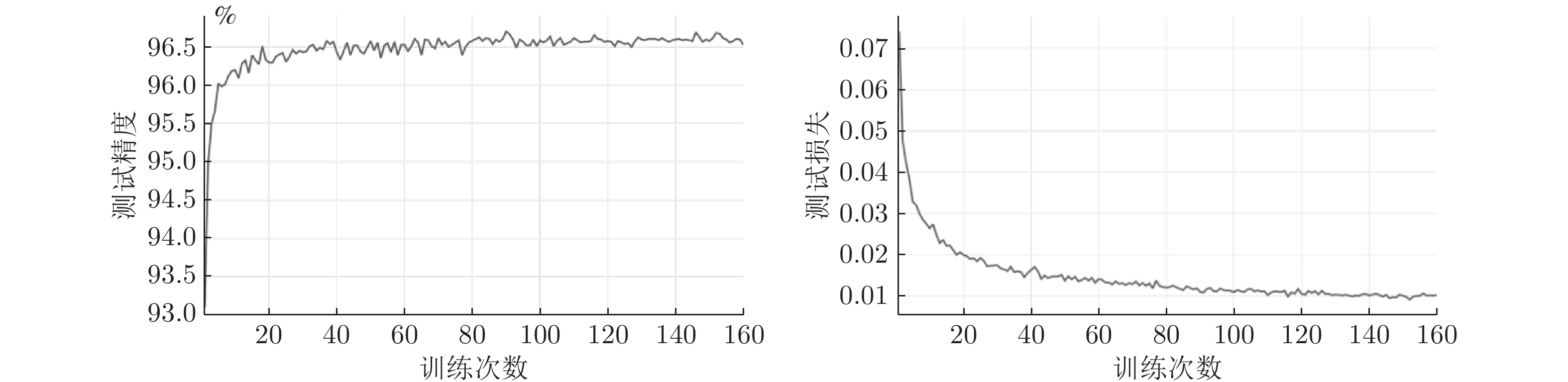
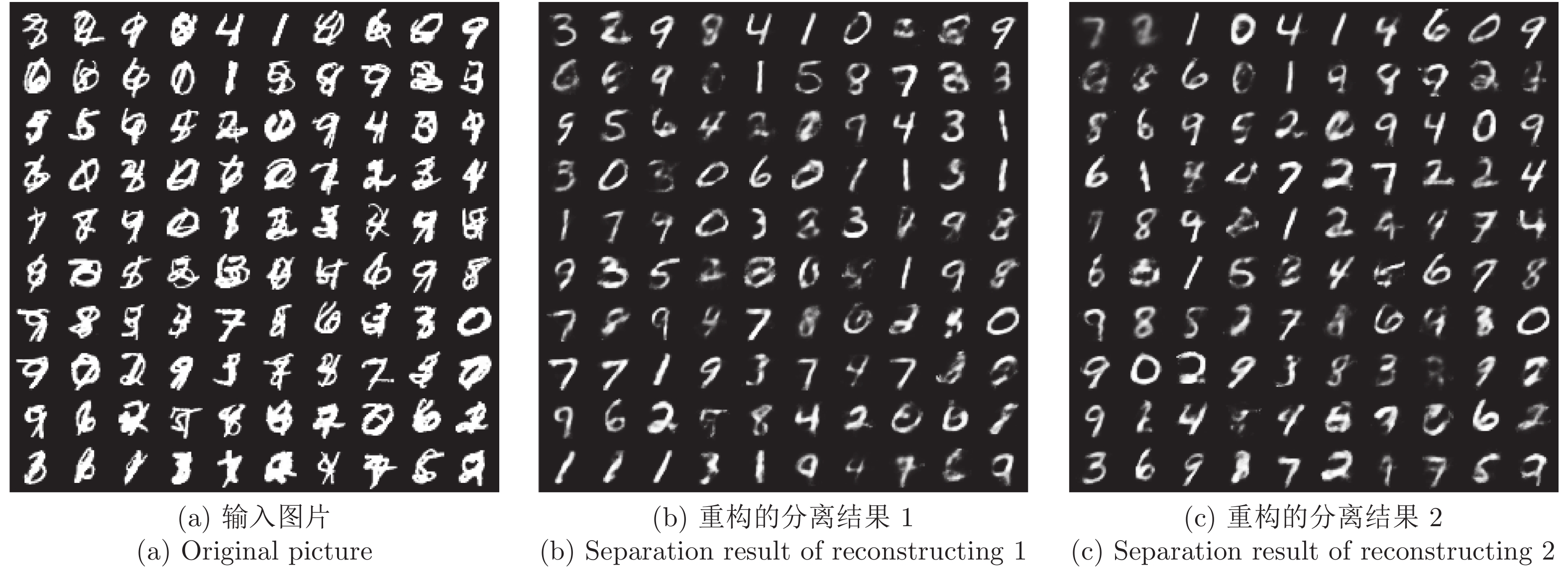
基于胶囊网络的向量神经元思想和期望最大算法(Expectation-maximization, EM), 设计了一种以EM为向量聚类算法的深度胶囊网络(Deep capsule network, DCN), 实现了重叠手写数字的识别与分离. 该网络由两部分组成, 第 1 部分是“识别网络”, 将 EM 算法改为 EM 向量聚类算法, 以替换原胶囊网络CapsNet 中的迭代路由部分, 这一改动优化了网络的运算过程, 实现了重叠数字识别. 第 2 部分是“重构网络”, 由结构完全相同的两个并行网络组成, 对双向量进行并行重构, 实现了重叠数字的分离. 实验结果显示, 对于 100% 全重叠手写数字图片本网络识别率达到了 96%, 对比CapsNet 在 80% 的重叠率下 95% 的识别率, 本文网络在难度提升的情况下, 识别率有明显提高, 能够将完全重叠的两张手写数字进行图片进行准确地分离.
基于胶囊网络的向量神经元思想和期望最大算法(Expectation-maximization, EM), 设计了一种以EM为向量聚类算法的深度胶囊网络(Deep capsule network, DCN), 实现了重叠手写数字的识别与分离. 该网络由两部分组成, 第 1 部分是“识别网络”, 将 EM 算法改为 EM 向量聚类算法, 以替换原胶囊网络CapsNet 中的迭代路由部分, 这一改动优化了网络的运算过程, 实现了重叠数字识别. 第 2 部分是“重构网络”, 由结构完全相同的两个并行网络组成, 对双向量进行并行重构, 实现了重叠数字的分离. 实验结果显示, 对于 100% 全重叠手写数字图片本网络识别率达到了 96%, 对比CapsNet 在 80% 的重叠率下 95% 的识别率, 本文网络在难度提升的情况下, 识别率有明显提高, 能够将完全重叠的两张手写数字进行图片进行准确地分离.


2022, 48(12): 3006-3023.
doi: 10.16383/j.aas.c190872
摘要:
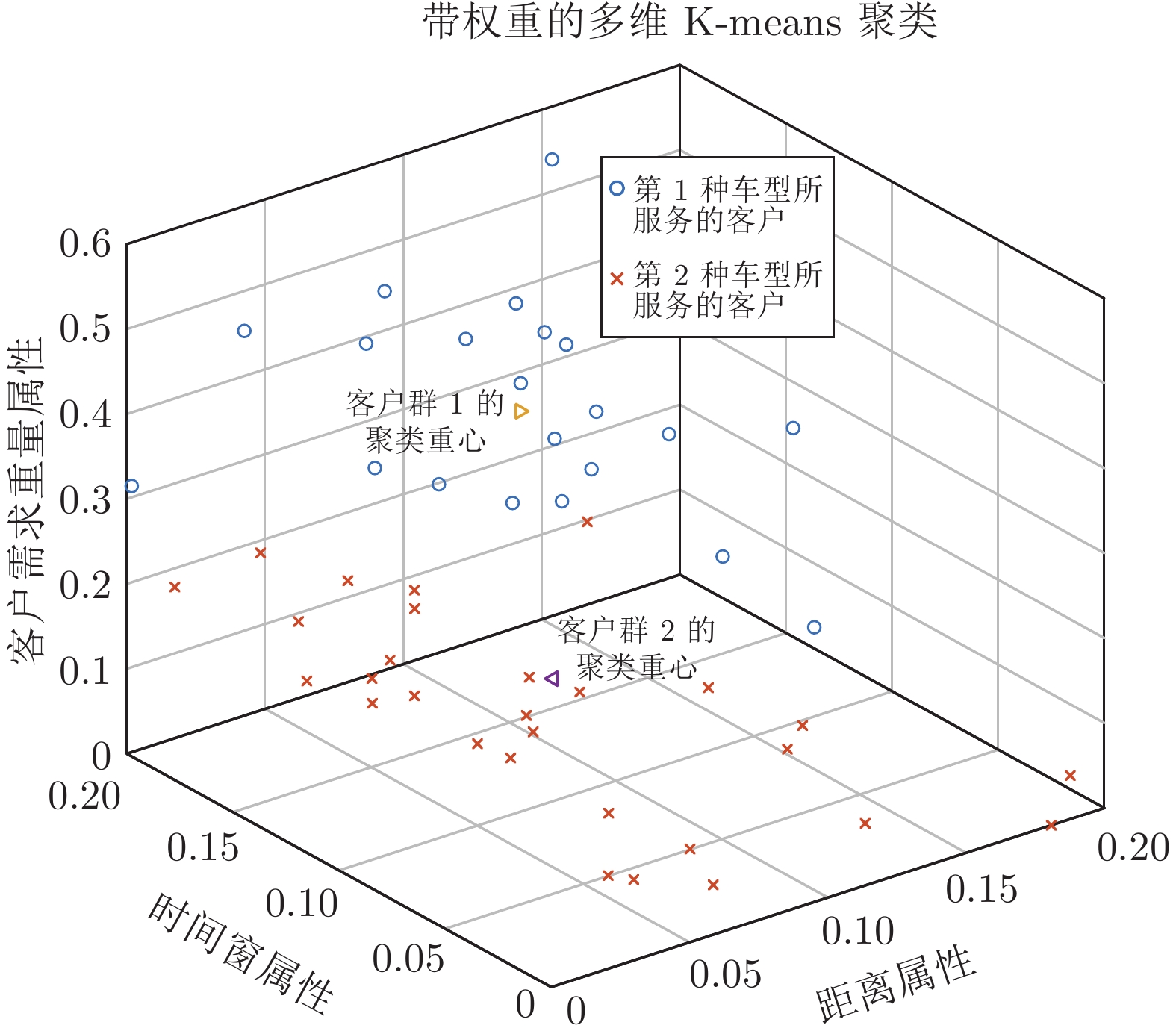
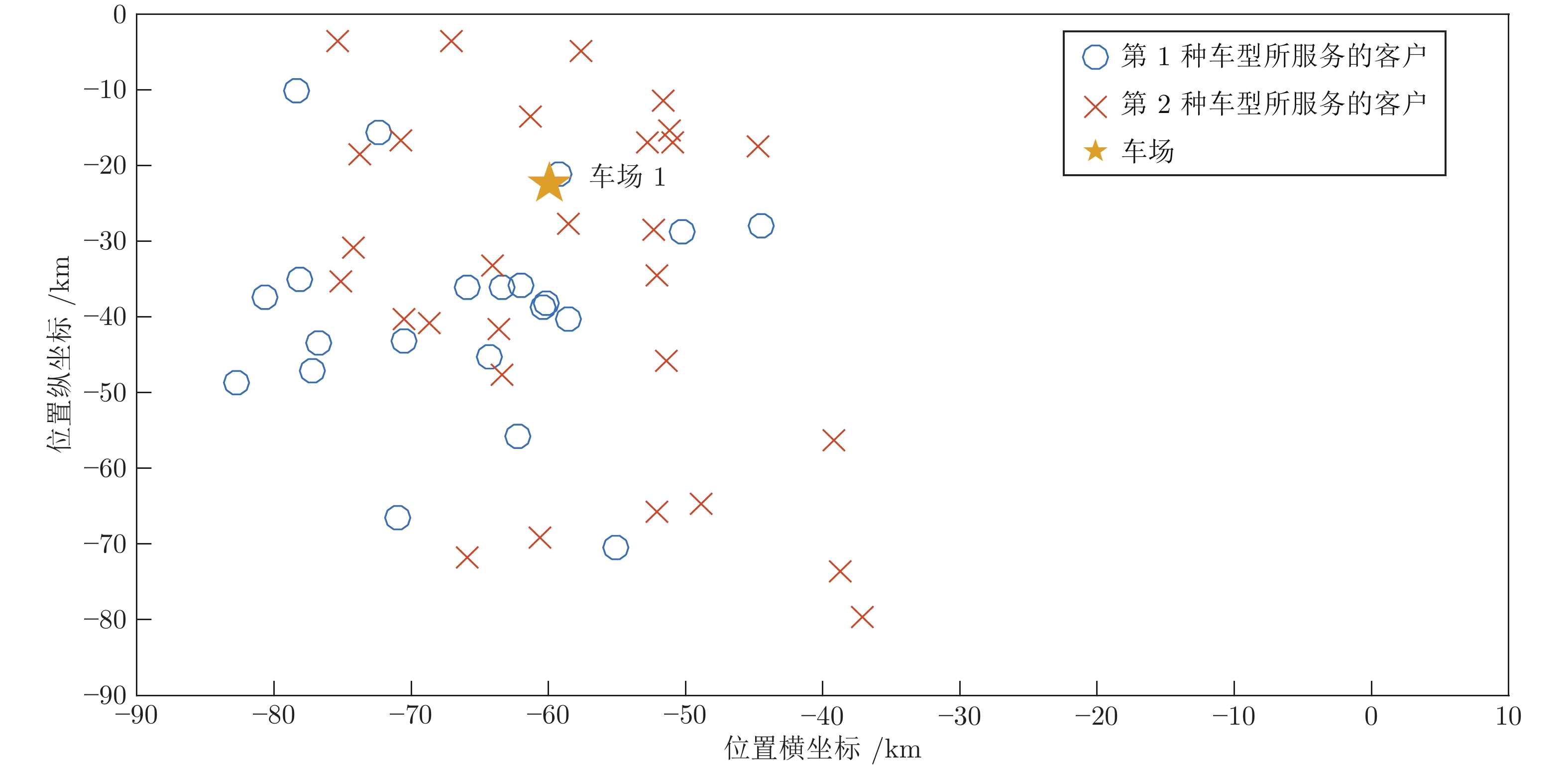
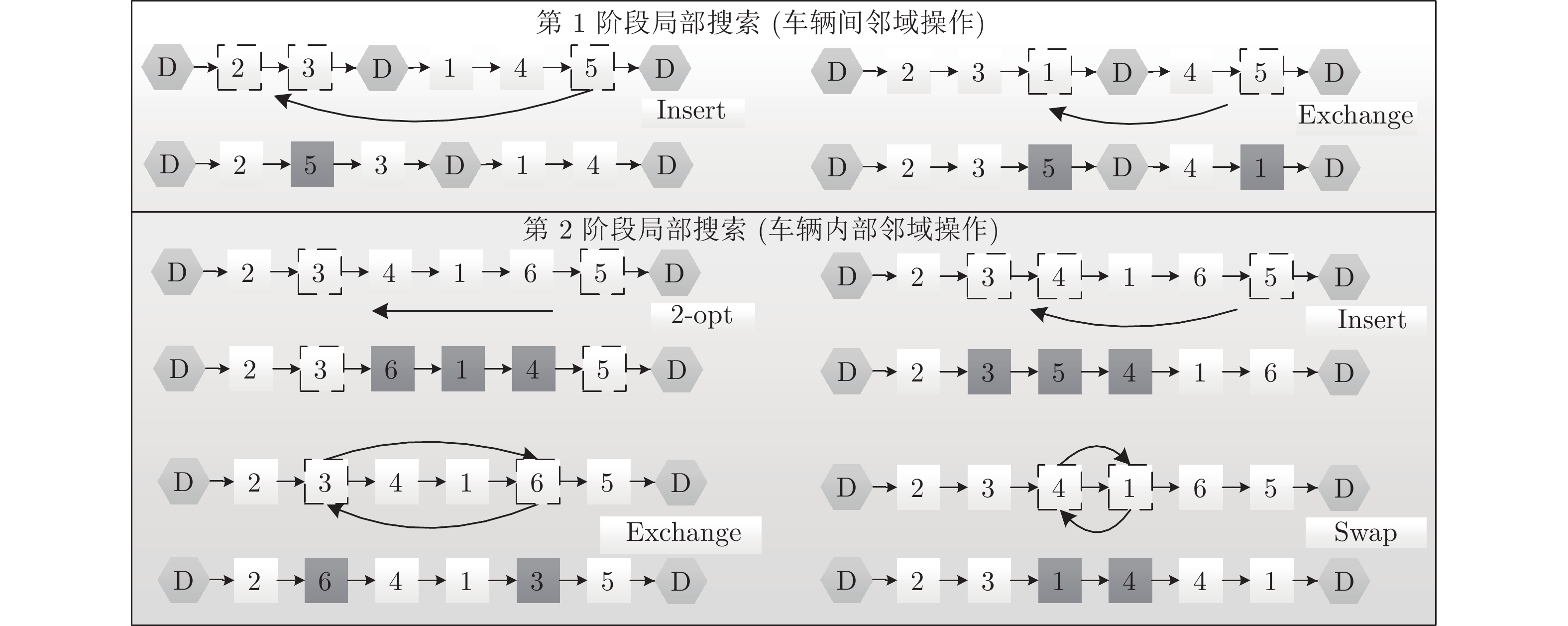
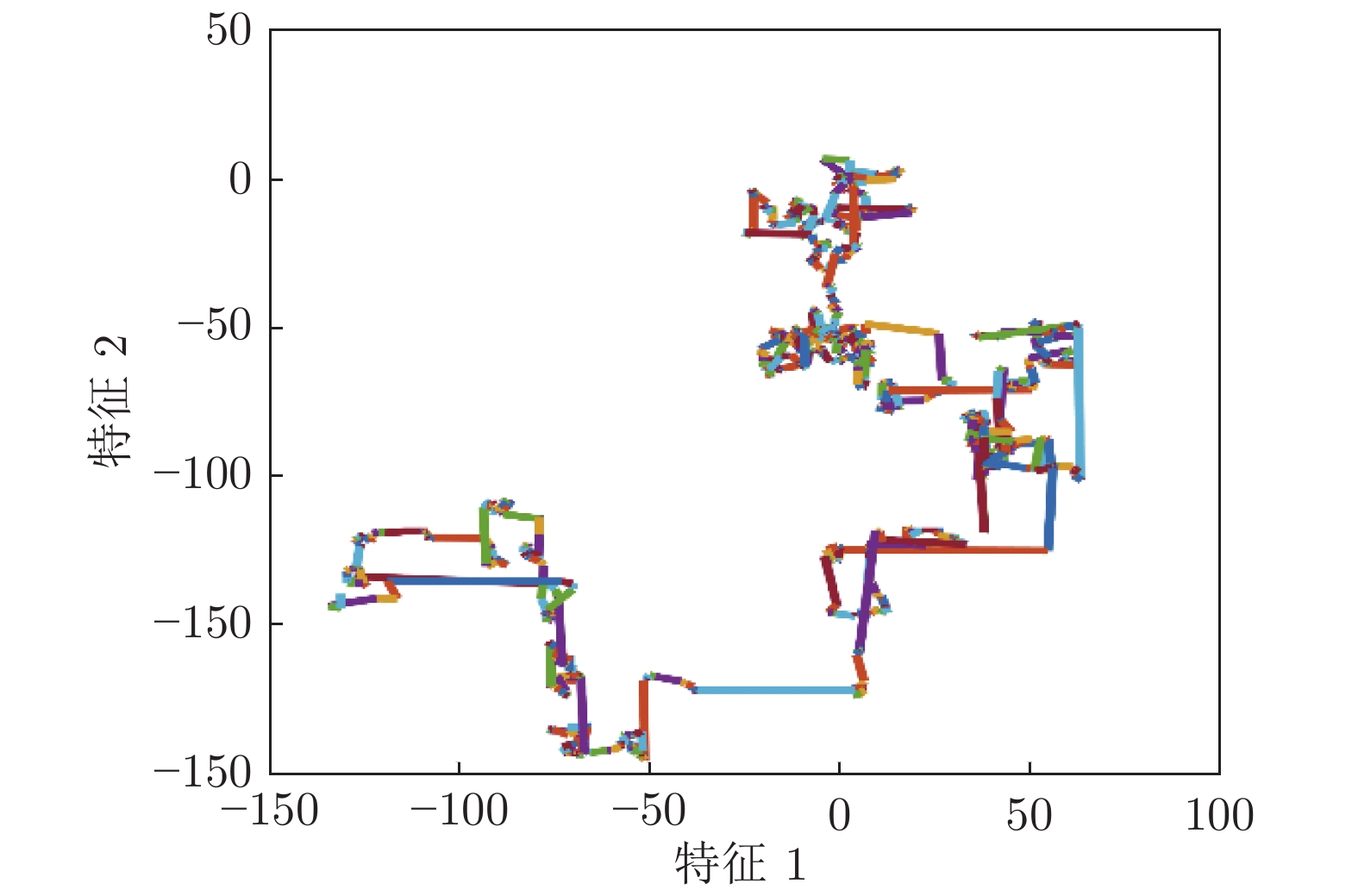
针对带时间窗的低能耗多车场多车型车辆路径问题(Low-energy-consumption multi-depots heterogeneous-fleet vehicle routing problem with time windows, LMHFVPR_TW), 提出一种结合聚类分解策略的增强蚁群算法(Enhanced ant colony optimization based on clustering decomposition, EACO_CD)进行求解. 首先, 由于该问题具有强约束、大规模和NP-Hard等复杂性, 为有效控制问题的求解规模并合理引导算法在优质解区域搜索, 根据问题特点设计两种基于K-means的聚类策略, 将LMHFVPR_TW合理分解为一系列带时间窗的低能耗单车场单车型车辆路径子问题(Low-energy-consumption vehicle routing problem with time windows, LVRP_TW); 其次, 本文提出一种增强蚁群算法(Enhanced ant colony optimization, EACO)求解分解后的各子问题(LVRP_TW), 进而获得原问题的解. EACO不仅引入信息素挥发系数控制因子进一步动态调节信息素挥发系数, 从而有效控制信息素的挥发以提高算法的全局搜索能力, 而且设计基于4种变邻域操作的两阶段变邻域局部搜索(Two-stage variable neighborhood search, TVNS)来增强算法的局部搜索能力. 最后, 在不同规模问题上的仿真和对比实验验证了所提EACO_CD的有效性.
针对带时间窗的低能耗多车场多车型车辆路径问题(Low-energy-consumption multi-depots heterogeneous-fleet vehicle routing problem with time windows, LMHFVPR_TW), 提出一种结合聚类分解策略的增强蚁群算法(Enhanced ant colony optimization based on clustering decomposition, EACO_CD)进行求解. 首先, 由于该问题具有强约束、大规模和NP-Hard等复杂性, 为有效控制问题的求解规模并合理引导算法在优质解区域搜索, 根据问题特点设计两种基于K-means的聚类策略, 将LMHFVPR_TW合理分解为一系列带时间窗的低能耗单车场单车型车辆路径子问题(Low-energy-consumption vehicle routing problem with time windows, LVRP_TW); 其次, 本文提出一种增强蚁群算法(Enhanced ant colony optimization, EACO)求解分解后的各子问题(LVRP_TW), 进而获得原问题的解. EACO不仅引入信息素挥发系数控制因子进一步动态调节信息素挥发系数, 从而有效控制信息素的挥发以提高算法的全局搜索能力, 而且设计基于4种变邻域操作的两阶段变邻域局部搜索(Two-stage variable neighborhood search, TVNS)来增强算法的局部搜索能力. 最后, 在不同规模问题上的仿真和对比实验验证了所提EACO_CD的有效性.



2022, 48(12): 3024-3041.
doi: 10.16383/j.aas.c190851
摘要:
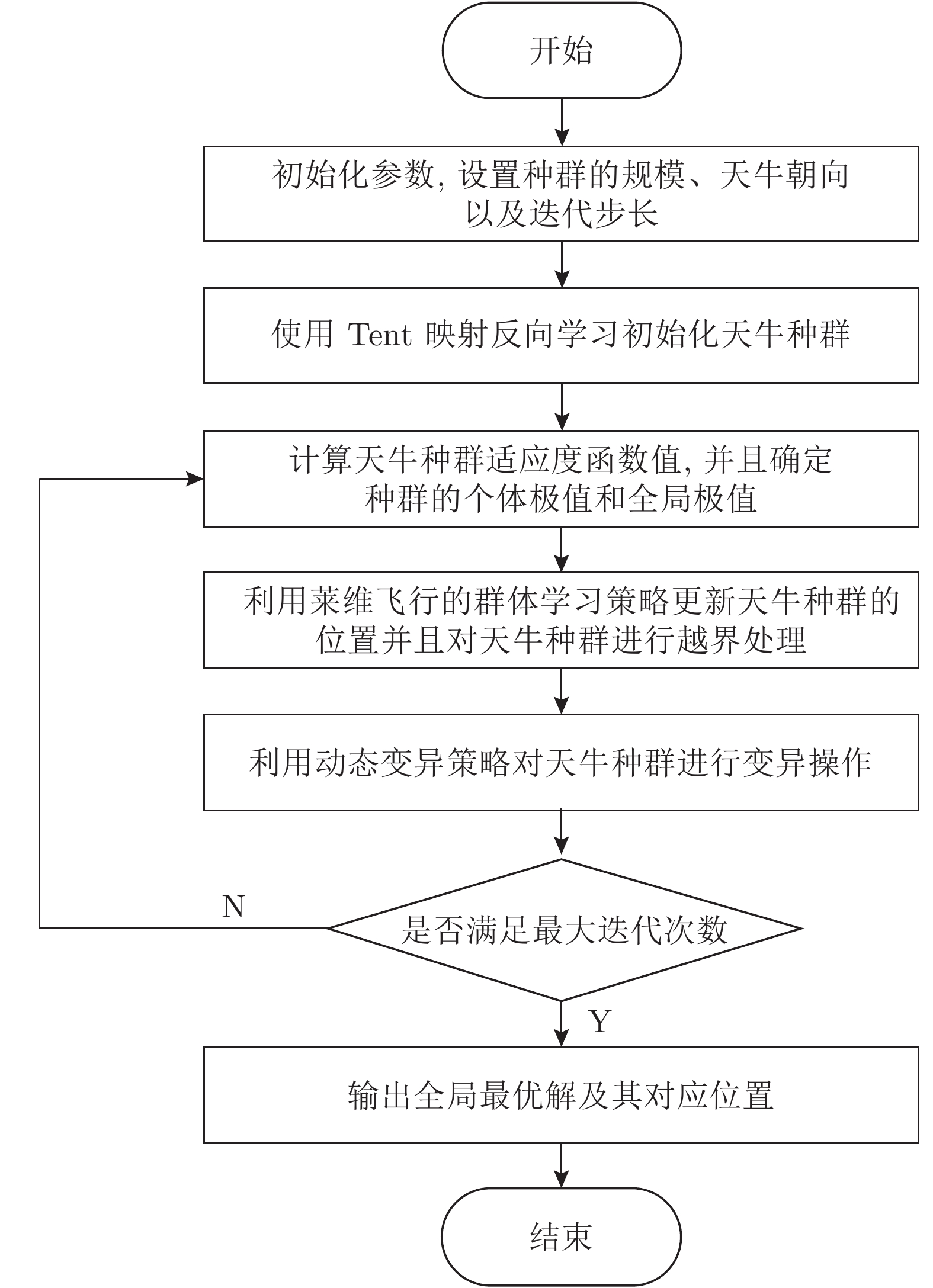
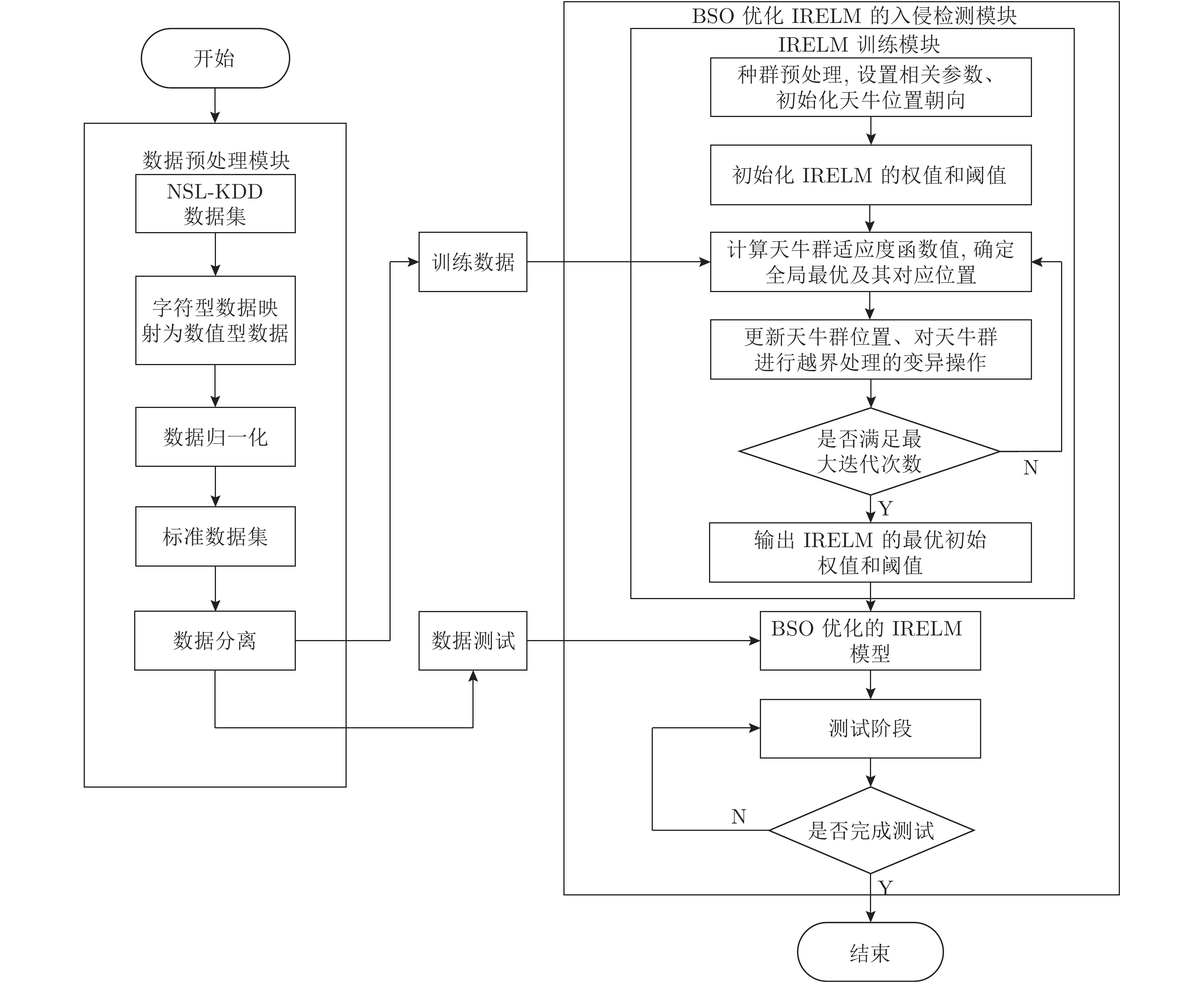
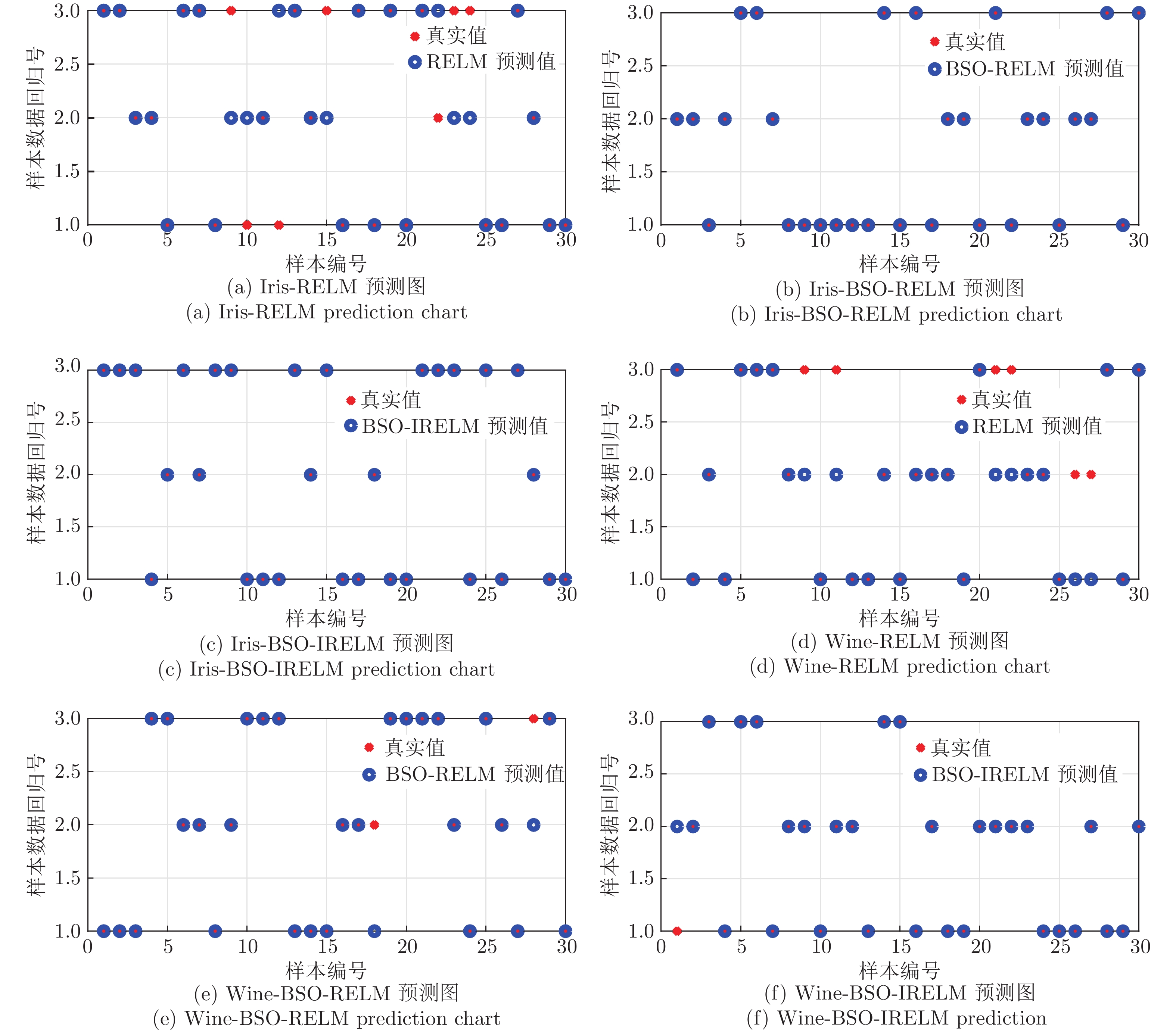
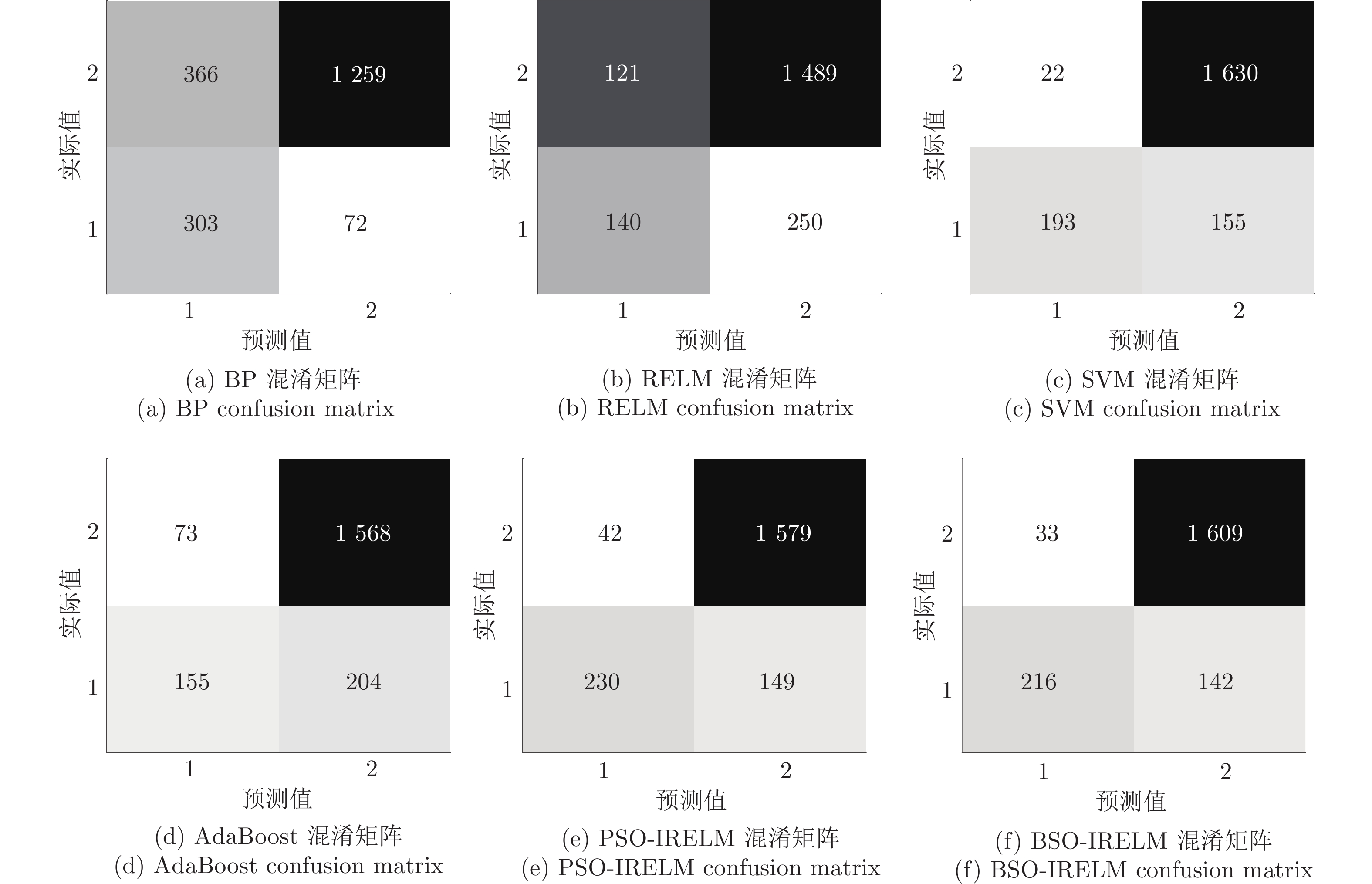
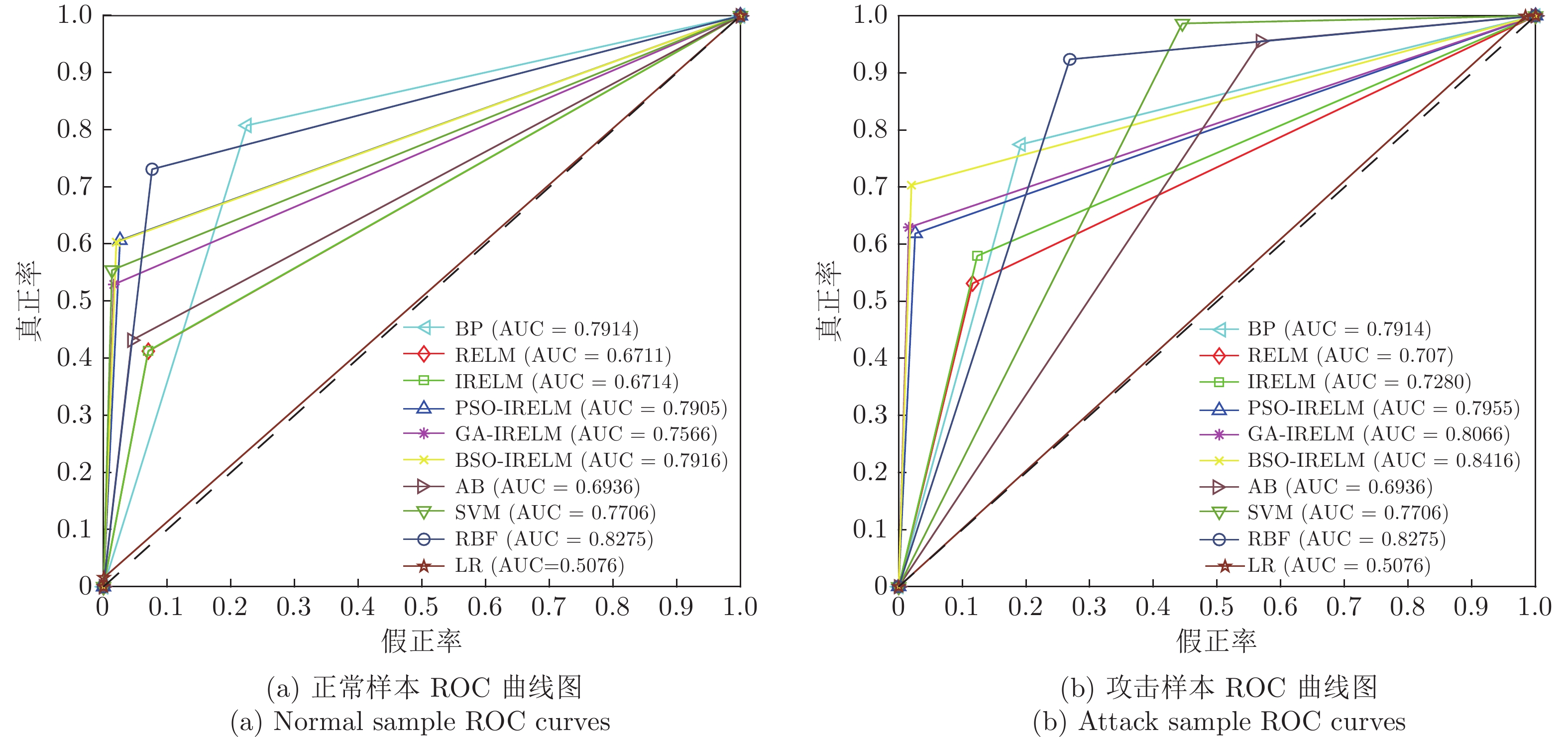
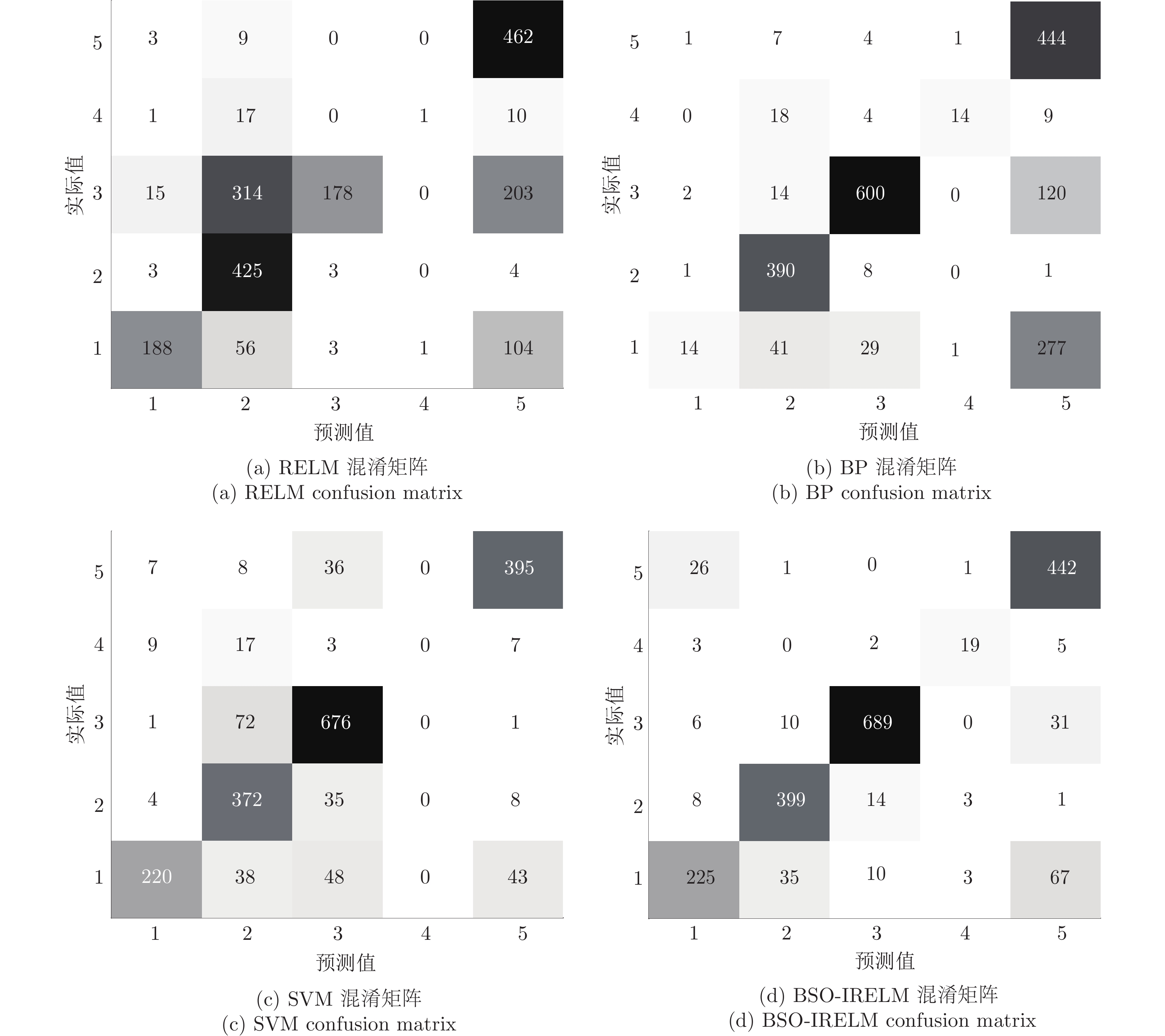
正则化极限学习机(Regularized extreme learning machine, RELM)因其极易于实现、训练速度快等优点在诸多领域均取得了成功应用. 对此, 本文将RELM引入到入侵检测中, 设计了天牛群优化算法(Beetle swarm optimization, BSO), 并针对RELM由于随机初始化参数带来的潜在缺陷, 提出基于天牛群优化与改进正则化极限学习机(BSO-IRELM)的网络入侵检测算法. 使用LU分解求解RELM的输出权值矩阵, 进一步缩短了RELM的训练时间, 同时利用BSO对RELM的权值和阈值进行联合优化. 为避免BSO算法陷入局部最优, 引入Tent映射反向学习、莱维飞行的群体学习与动态变异策略提升优化性能. 实验结果表明, 在机器学习UCI数据集上, 相比于RELM、IRELM、GA-IRELM、PSO-IRELM等算法, BSO-IRELM的数据分类性能提升明显. 最后, 将BSO-IRELM应用于网络入侵检测数据集NSL-KDD, 并与BP (Back propagation)、LR (Logistics regression)、RBF (Radial basis function)、AB (AdaBoost)、SVM (Support vector machine)、RELM、IRELM等算法进行了对比, 结果证明BSO-IRELM算法在准确率、精确率、真正率和假正率等指标上均具有明显优势.
正则化极限学习机(Regularized extreme learning machine, RELM)因其极易于实现、训练速度快等优点在诸多领域均取得了成功应用. 对此, 本文将RELM引入到入侵检测中, 设计了天牛群优化算法(Beetle swarm optimization, BSO), 并针对RELM由于随机初始化参数带来的潜在缺陷, 提出基于天牛群优化与改进正则化极限学习机(BSO-IRELM)的网络入侵检测算法. 使用LU分解求解RELM的输出权值矩阵, 进一步缩短了RELM的训练时间, 同时利用BSO对RELM的权值和阈值进行联合优化. 为避免BSO算法陷入局部最优, 引入Tent映射反向学习、莱维飞行的群体学习与动态变异策略提升优化性能. 实验结果表明, 在机器学习UCI数据集上, 相比于RELM、IRELM、GA-IRELM、PSO-IRELM等算法, BSO-IRELM的数据分类性能提升明显. 最后, 将BSO-IRELM应用于网络入侵检测数据集NSL-KDD, 并与BP (Back propagation)、LR (Logistics regression)、RBF (Radial basis function)、AB (AdaBoost)、SVM (Support vector machine)、RELM、IRELM等算法进行了对比, 结果证明BSO-IRELM算法在准确率、精确率、真正率和假正率等指标上均具有明显优势.


2022, 48(12): 3042-3061.
doi: 10.16383/j.aas.c190842
摘要:
在粒子群优化算法中, 当勘探时间持续过长, 将可能导致种群在解空间过度徘徊; 种群在开发阶段陷入局部最优后, 难以再次进行全局勘探. 针对上述问题, 提出方波触发勘探与开发的粒子群优化算法. 依据方波的周期特性, 在前半个周期内使用标准粒子群优化算法执行全局勘探, 后半个周期使用改进的更新公式执行局部开发. 经过实验验证, 在方波触发机制下, 通过为粒子提供多变步长, 可达到周期性触发勘探与开发的目的. 使用多类型测试函数, 将该算法与新改进粒子群算法、改进人工蜂群算法、改进差分算法在30、50和100维下比较, 实验结果表明, 该算法在收敛速度和精度上更具优势.
在粒子群优化算法中, 当勘探时间持续过长, 将可能导致种群在解空间过度徘徊; 种群在开发阶段陷入局部最优后, 难以再次进行全局勘探. 针对上述问题, 提出方波触发勘探与开发的粒子群优化算法. 依据方波的周期特性, 在前半个周期内使用标准粒子群优化算法执行全局勘探, 后半个周期使用改进的更新公式执行局部开发. 经过实验验证, 在方波触发机制下, 通过为粒子提供多变步长, 可达到周期性触发勘探与开发的目的. 使用多类型测试函数, 将该算法与新改进粒子群算法、改进人工蜂群算法、改进差分算法在30、50和100维下比较, 实验结果表明, 该算法在收敛速度和精度上更具优势.





2022, 48(12): 3062-3066.
doi: 10.16383/j.aas.c190612
摘要:
针对一类分布参数系统(Distributed parameter system, DPS), 提出了源控制方法. 将构成分布参数系统的空间分成若干分, 每份为一个节点, 在所有的节点中, 将能产生量变源头的节点定义为源节点, 跟随源节点变化的节点为跟随节点, 以此构建分布参数系统模型. 对于源节点, 根据经验函数结合反馈偏差调节设计控制器, 对跟随节点考虑源节点控制的逸散作用控制. 利用Lyapunov稳定性理论并结合线性矩阵不等式(Linear matrix inequality, LMI)处理方法, 得出了分布式参数系统稳定源控制器存在的充分条件. 最后结合所给条件, 给出一个数值仿真说明其有效性.
针对一类分布参数系统(Distributed parameter system, DPS), 提出了源控制方法. 将构成分布参数系统的空间分成若干分, 每份为一个节点, 在所有的节点中, 将能产生量变源头的节点定义为源节点, 跟随源节点变化的节点为跟随节点, 以此构建分布参数系统模型. 对于源节点, 根据经验函数结合反馈偏差调节设计控制器, 对跟随节点考虑源节点控制的逸散作用控制. 利用Lyapunov稳定性理论并结合线性矩阵不等式(Linear matrix inequality, LMI)处理方法, 得出了分布式参数系统稳定源控制器存在的充分条件. 最后结合所给条件, 给出一个数值仿真说明其有效性.


2022, 48(12): 3067-3074.
doi: 10.16383/j.aas.c190591
摘要:
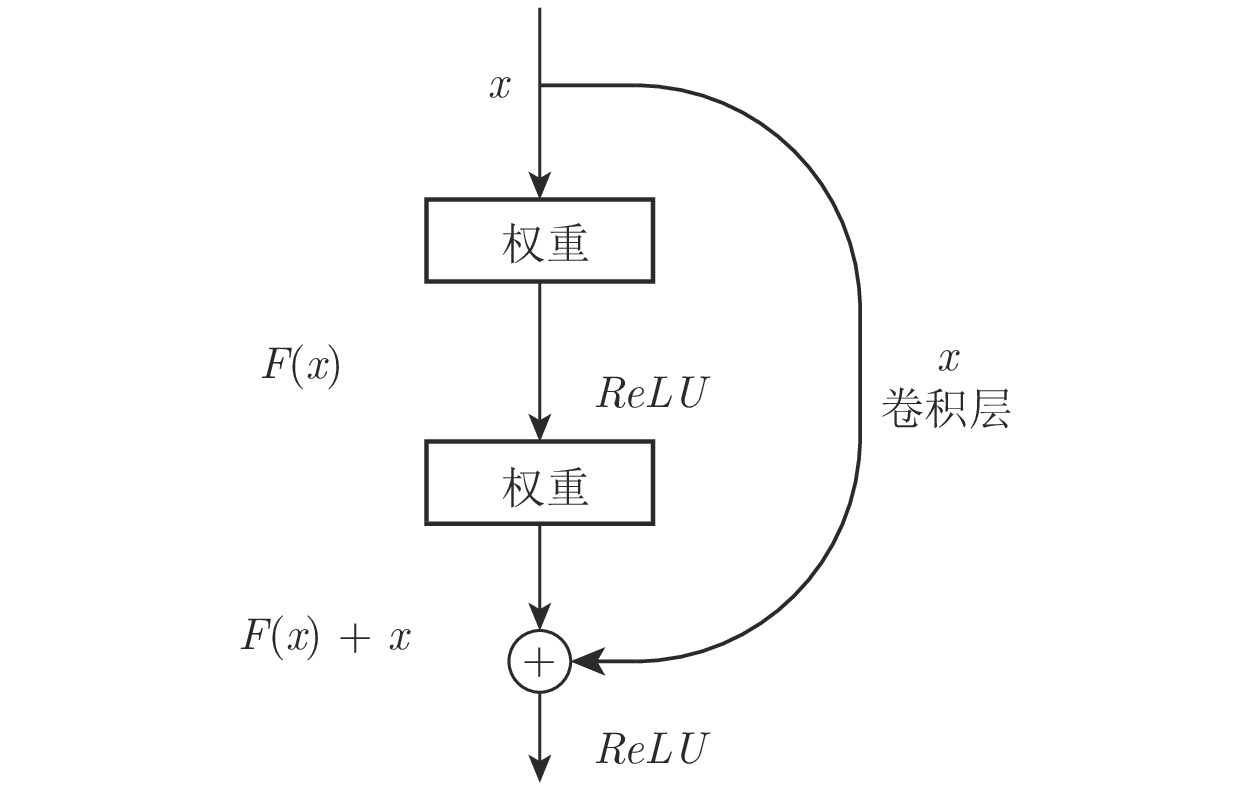
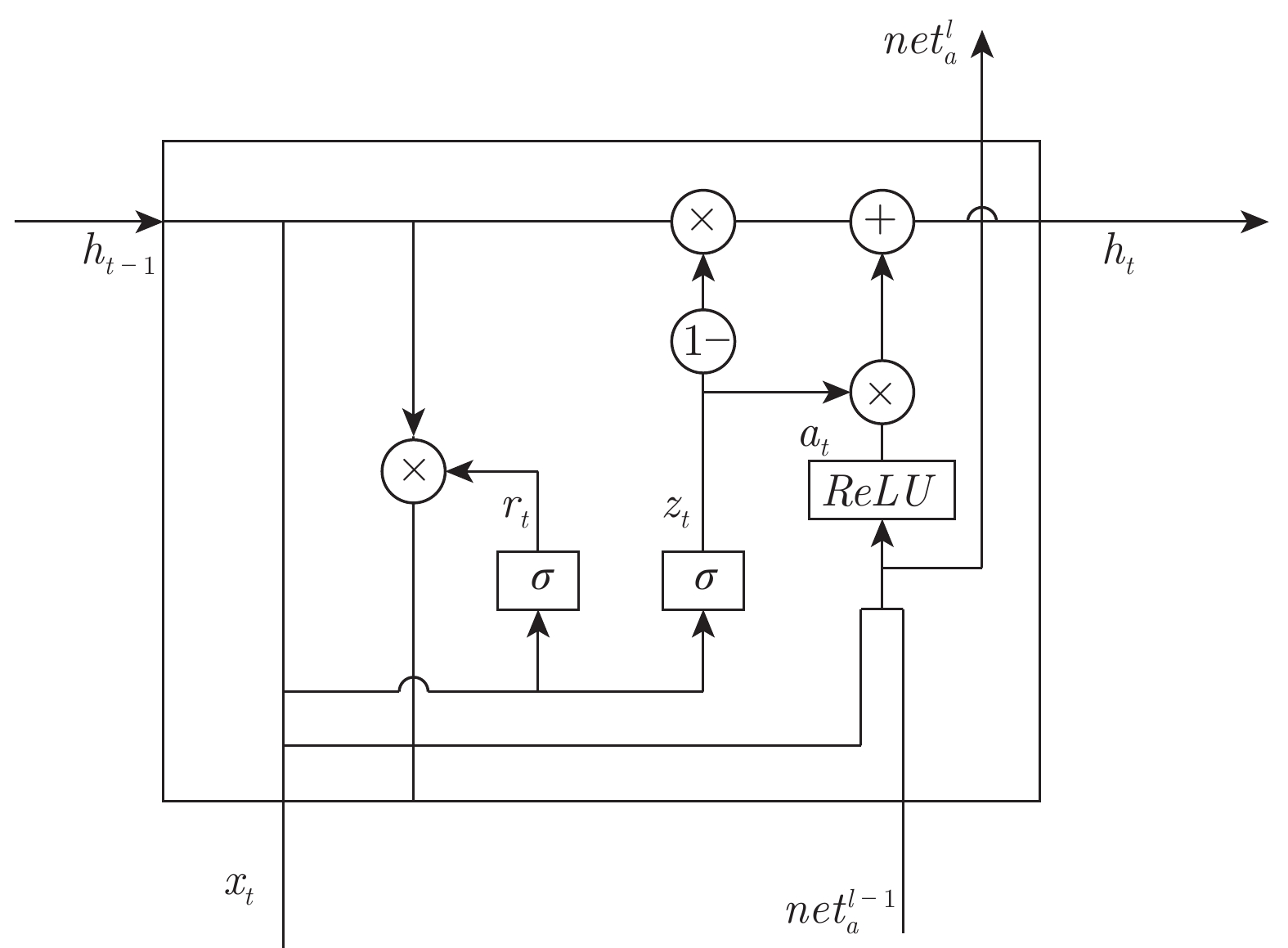
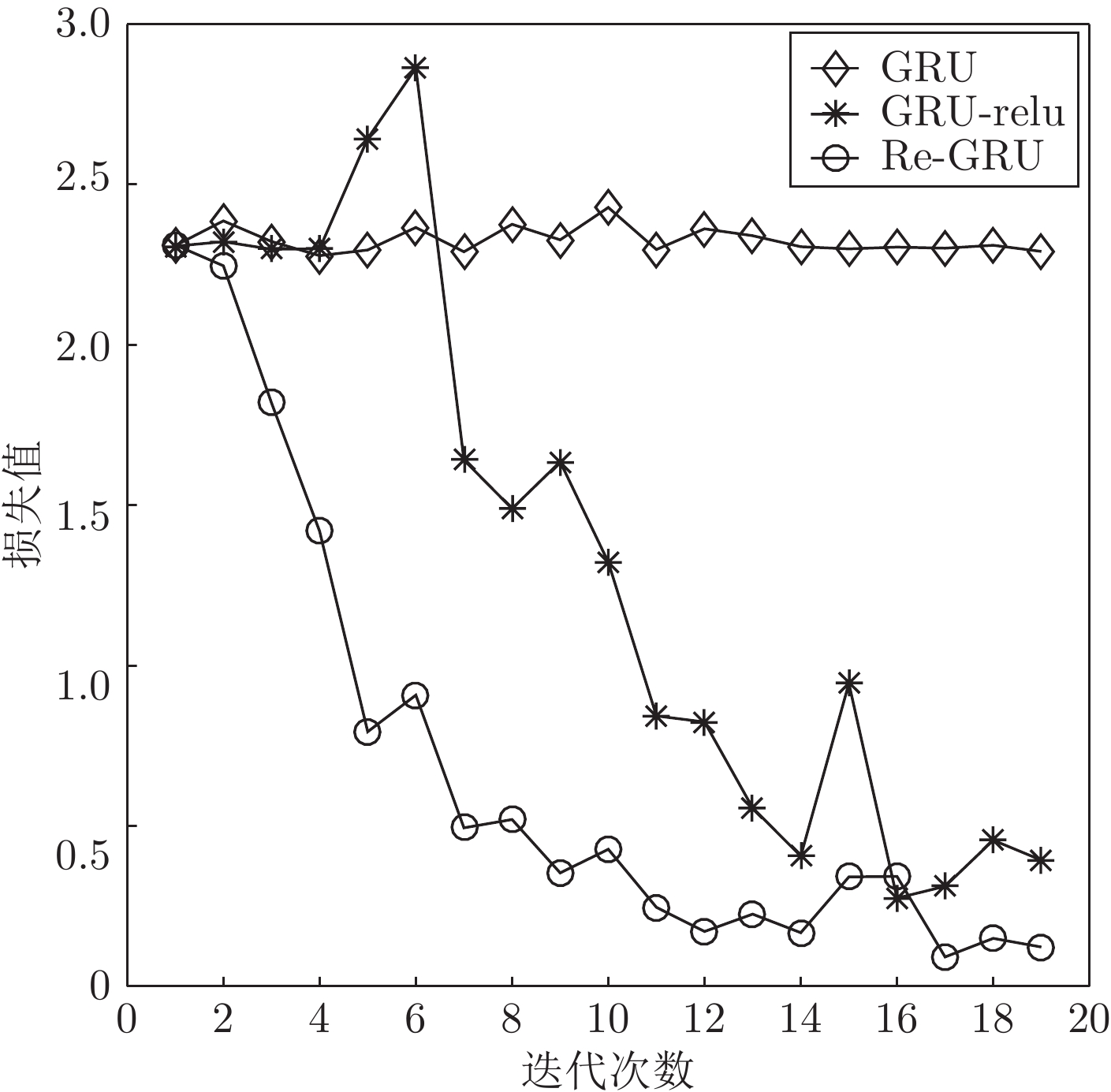
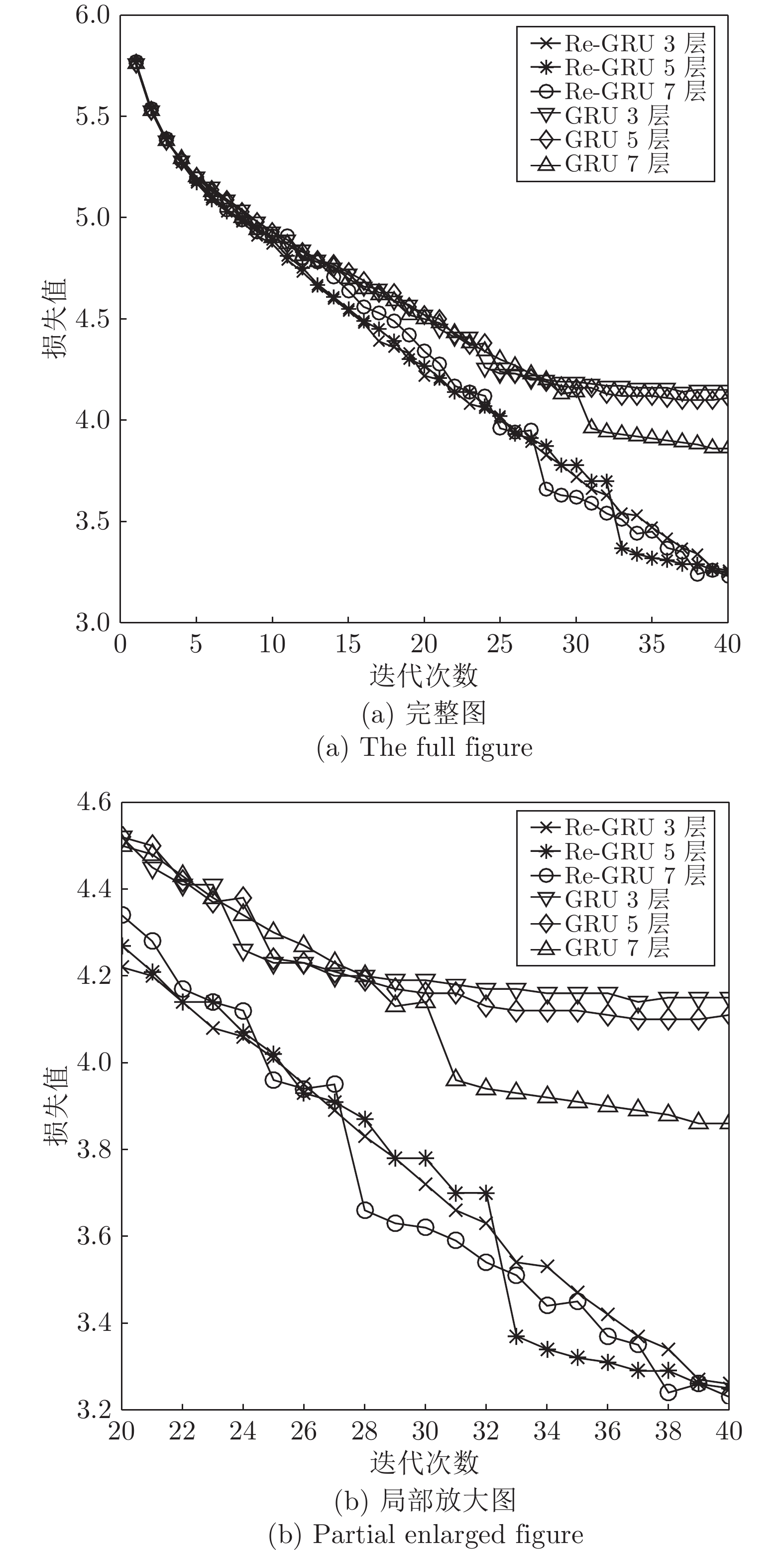
传统循环神经网络易发生梯度消失和网络退化问题. 利用非饱和激活函数可以有效克服梯度消失的性质, 同时借鉴卷积神经网络中的残差结构能够有效缓解网络退化的特性, 在门控循环神经网络(Gated recurrent unit, GRU)的基础上提出了基于残差的门控循环单元(Residual-GRU, Re-GRU)来缓解梯度消失和网络退化问题. Re-GRU的改进主要包括两个方面: 1)将原有GRU的候选隐状态的激活函数改为非饱和激活函数; 2)在GRU的候选隐状态表示中引入残差信息. 对候选隐状态激活函数的改动不仅可以有效避免由饱和激活函数带来的梯度消失问题, 同时也能够更好地引入残差信息, 使网络对梯度变化更敏感,从而达到缓解网络退化的目的. 进行了图像识别、构建语言模型和语音识别3类不同的测试实验, 实验结果均表明, Re-GRU拥有比对比方法更高的检测性能, 同时在运行速度方面优于Highway-GRU和长短期记忆单元. 其中, 在语言模型预测任务中的Penn Treebank数据集上取得了23.88的困惑度, 相比有记录的最低困惑度, 该方法的困惑度降低了一半.
传统循环神经网络易发生梯度消失和网络退化问题. 利用非饱和激活函数可以有效克服梯度消失的性质, 同时借鉴卷积神经网络中的残差结构能够有效缓解网络退化的特性, 在门控循环神经网络(Gated recurrent unit, GRU)的基础上提出了基于残差的门控循环单元(Residual-GRU, Re-GRU)来缓解梯度消失和网络退化问题. Re-GRU的改进主要包括两个方面: 1)将原有GRU的候选隐状态的激活函数改为非饱和激活函数; 2)在GRU的候选隐状态表示中引入残差信息. 对候选隐状态激活函数的改动不仅可以有效避免由饱和激活函数带来的梯度消失问题, 同时也能够更好地引入残差信息, 使网络对梯度变化更敏感,从而达到缓解网络退化的目的. 进行了图像识别、构建语言模型和语音识别3类不同的测试实验, 实验结果均表明, Re-GRU拥有比对比方法更高的检测性能, 同时在运行速度方面优于Highway-GRU和长短期记忆单元. 其中, 在语言模型预测任务中的Penn Treebank数据集上取得了23.88的困惑度, 相比有记录的最低困惑度, 该方法的困惑度降低了一半.