2022年 第48卷 第1期
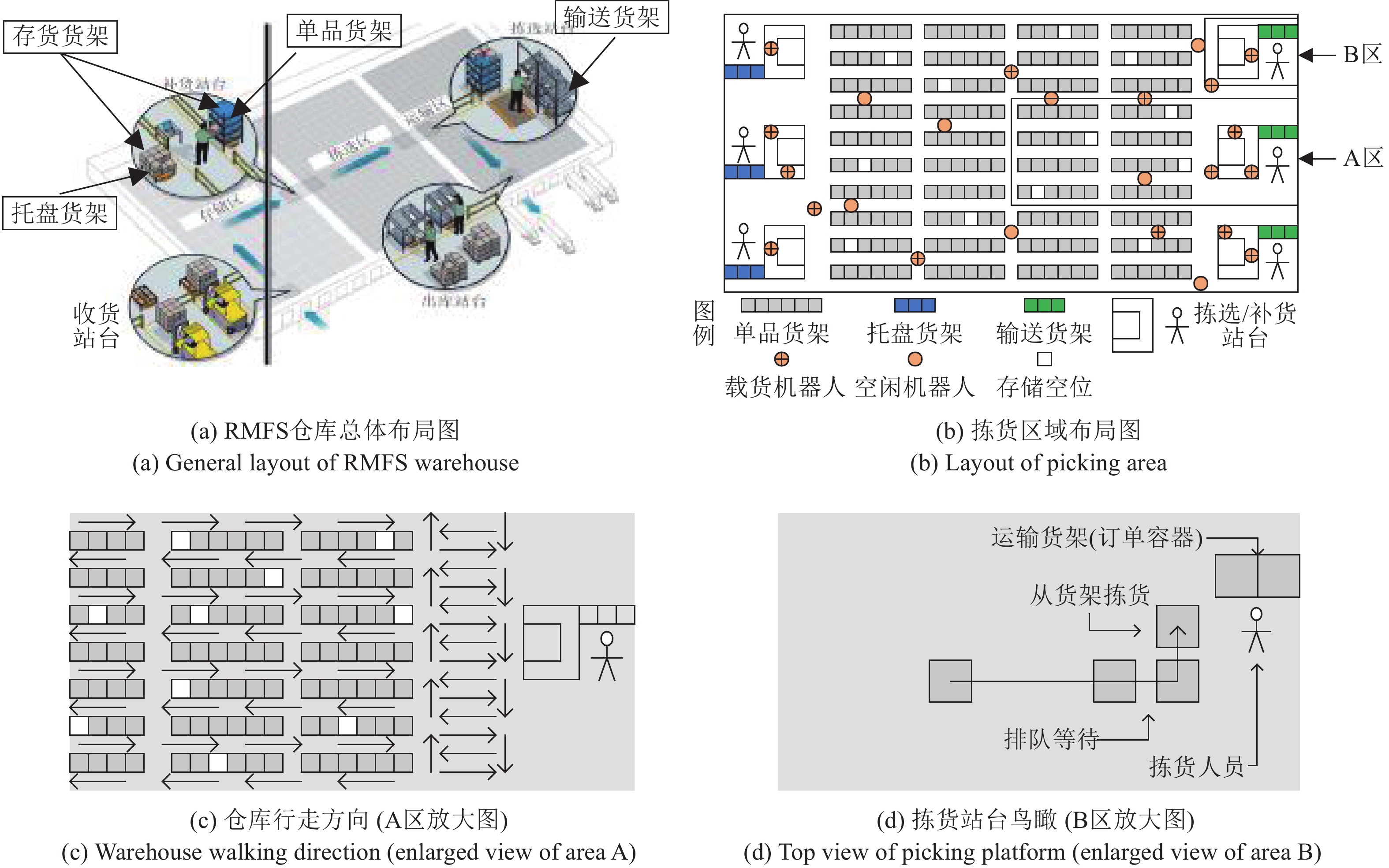
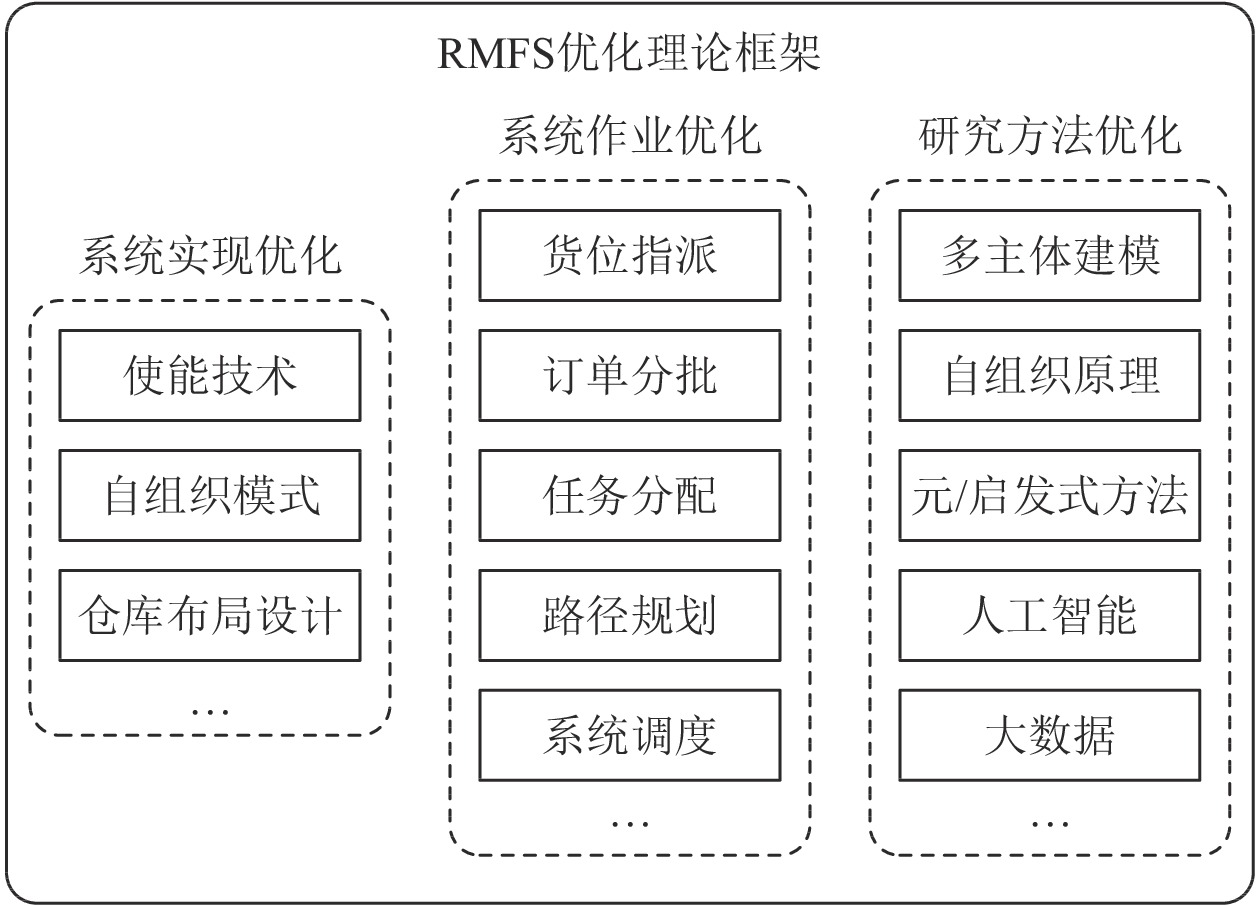
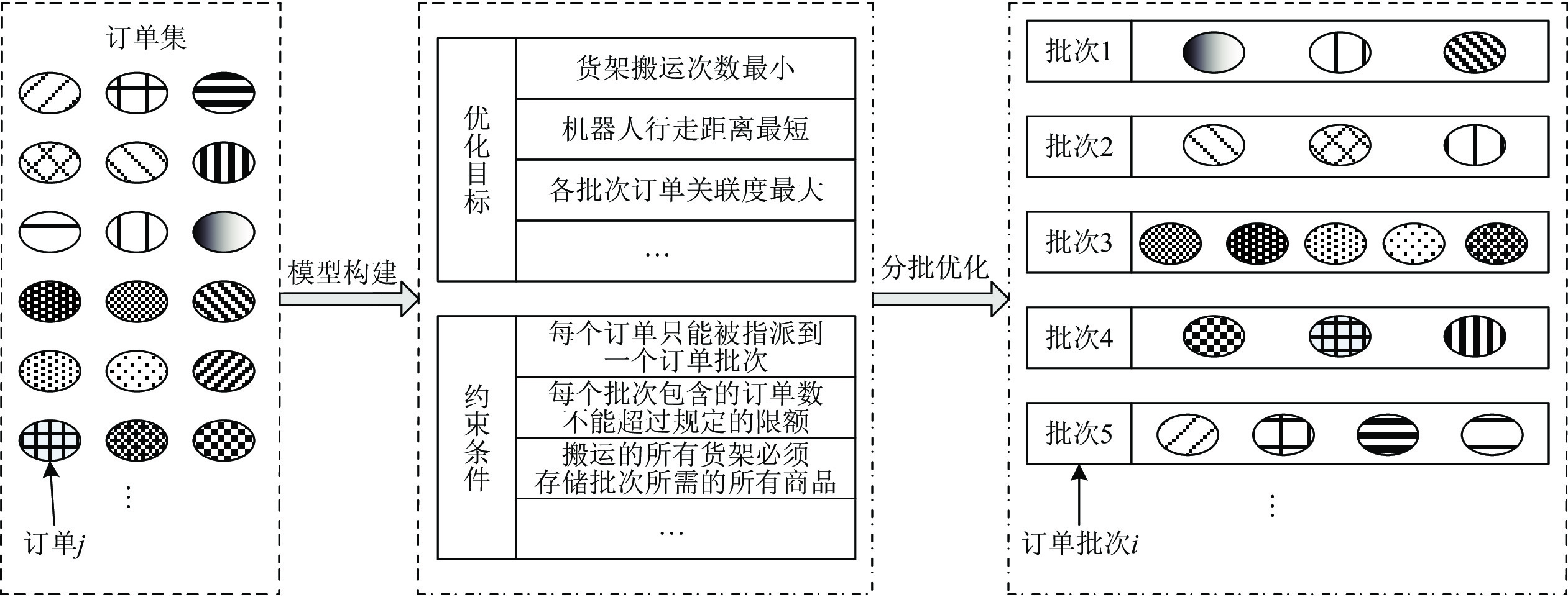
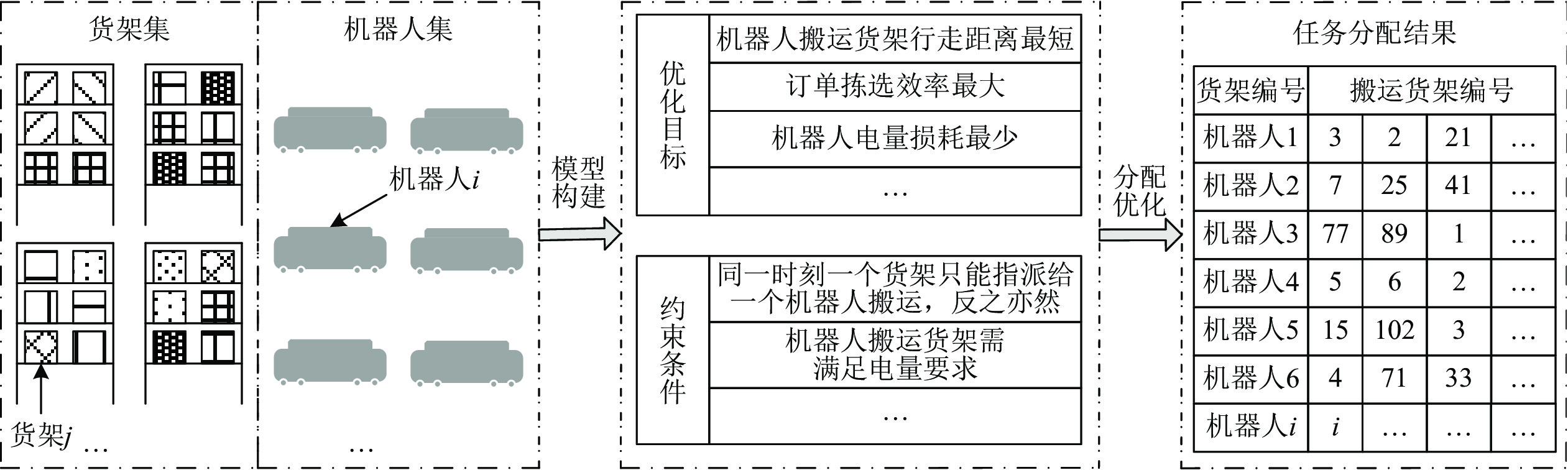
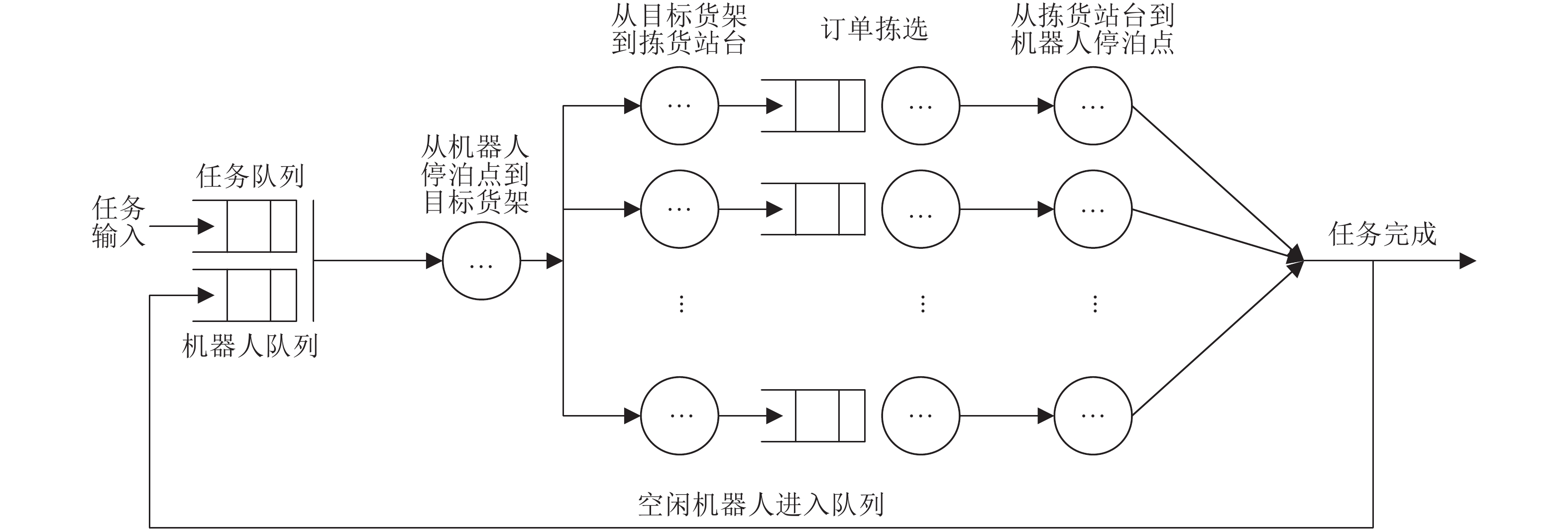
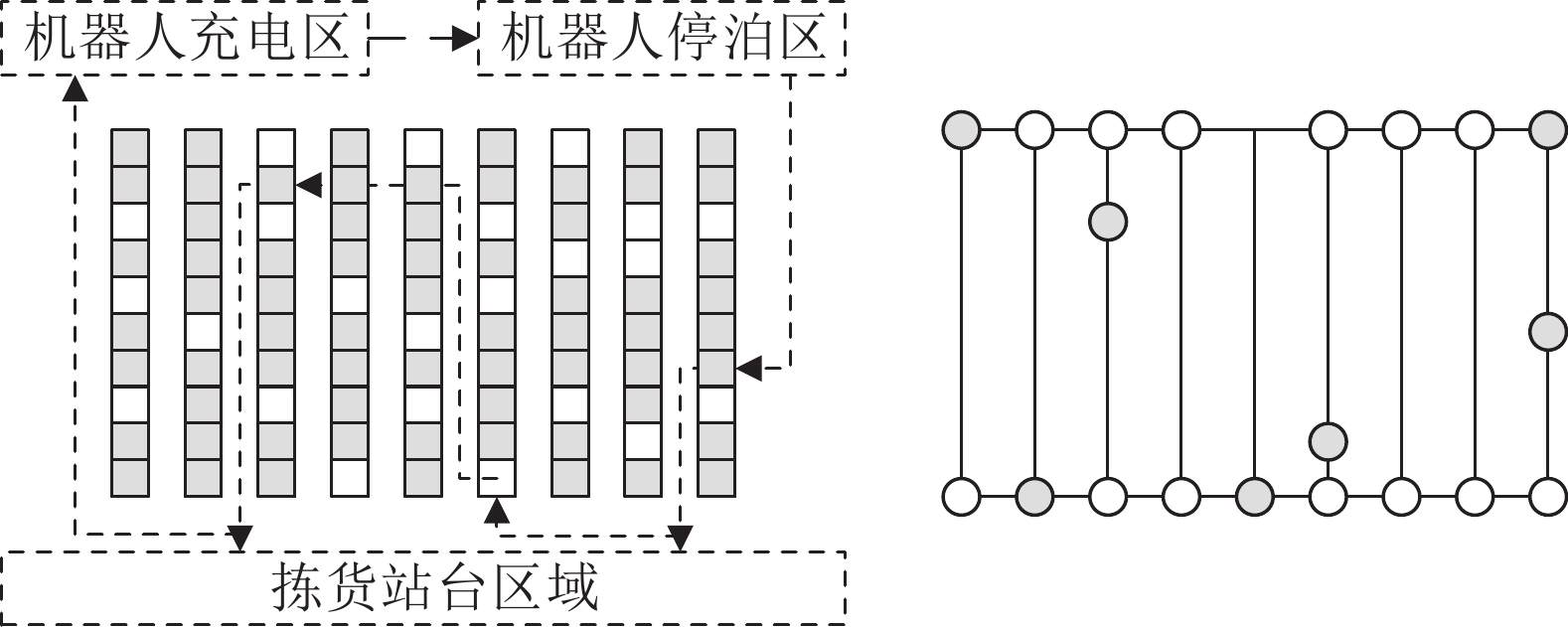
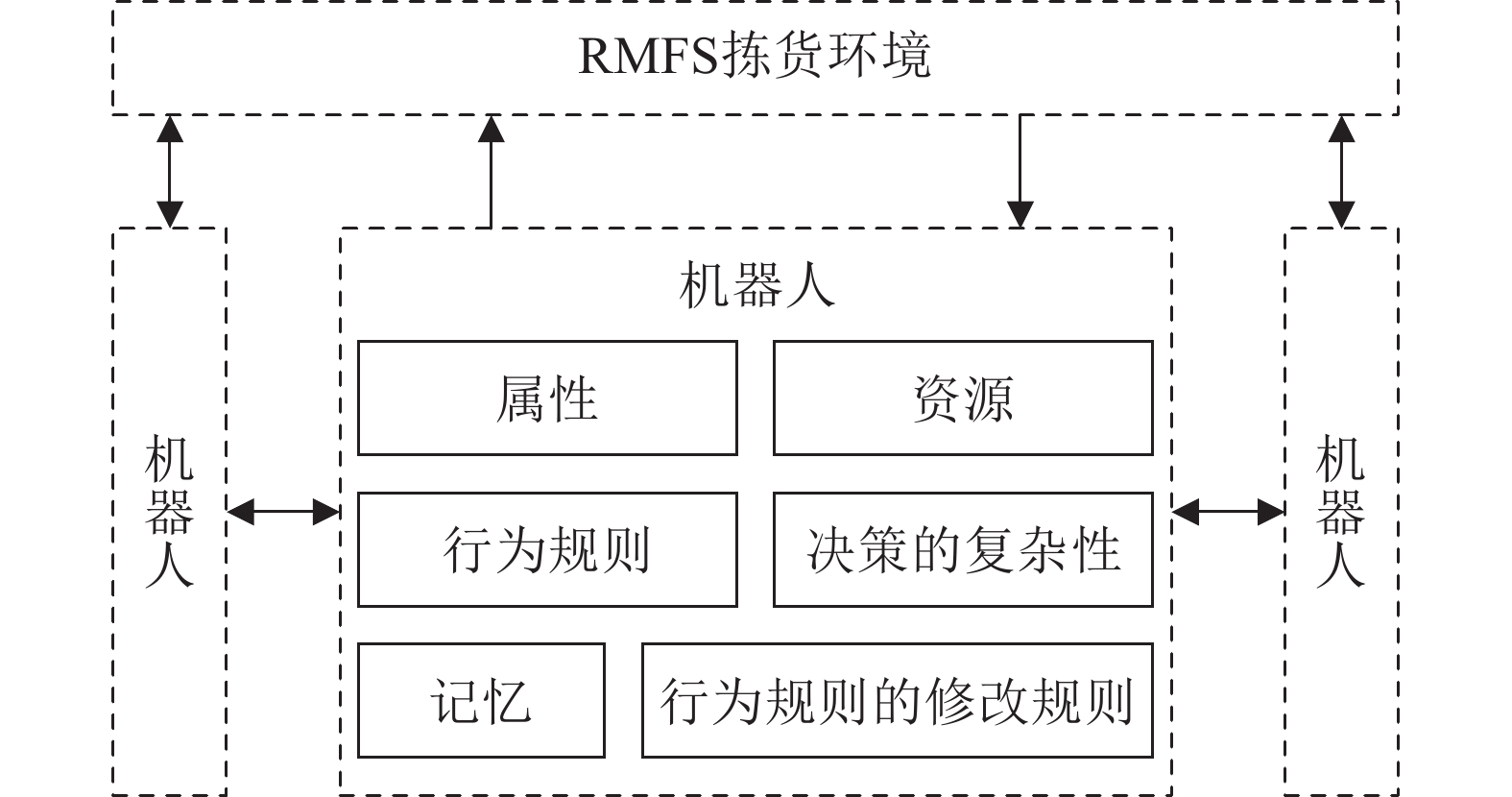
基于移动机器人的拣货系统(Robotic mobile fulfillment systems, RMFS)作为一种新型物至人的拣货系统, 相比人工拣货系统和AS/RS拣货系统(下文统称传统拣货系统)具有更高的拣货效率、更好的系统可扩展性和柔性. 为全面了解RMFS的运行模式及其优化方向, 本文首先回顾了RMFS的工作流程及优化理论框架, 然后对RMFS的货位指派、订单分批、任务分配、路径规划以及建模方法等问题进行了文献回顾和总结, 并指出了RMFS与传统拣货系统在拣货过程方面的异同及当前研究的不足. 最后, 讨论了RMFS的几个重要研究方向, 为RMFS的理论研究和应用实践提供参考.





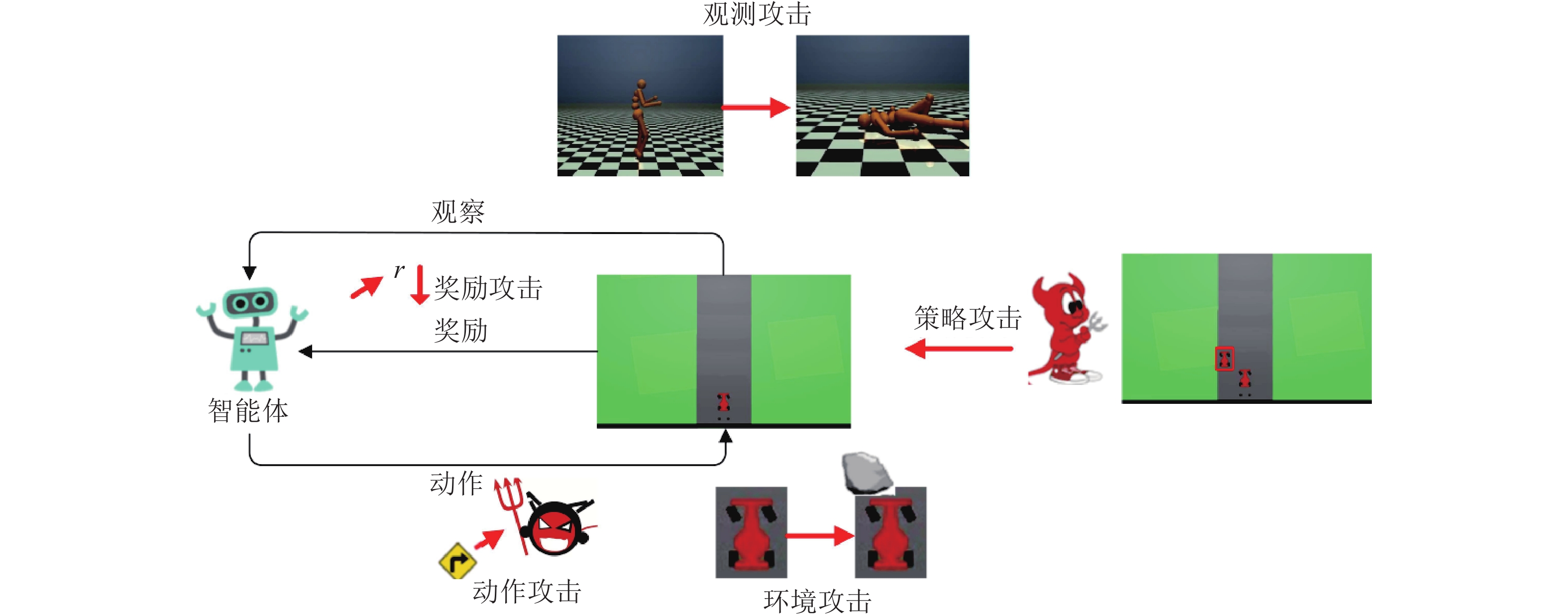
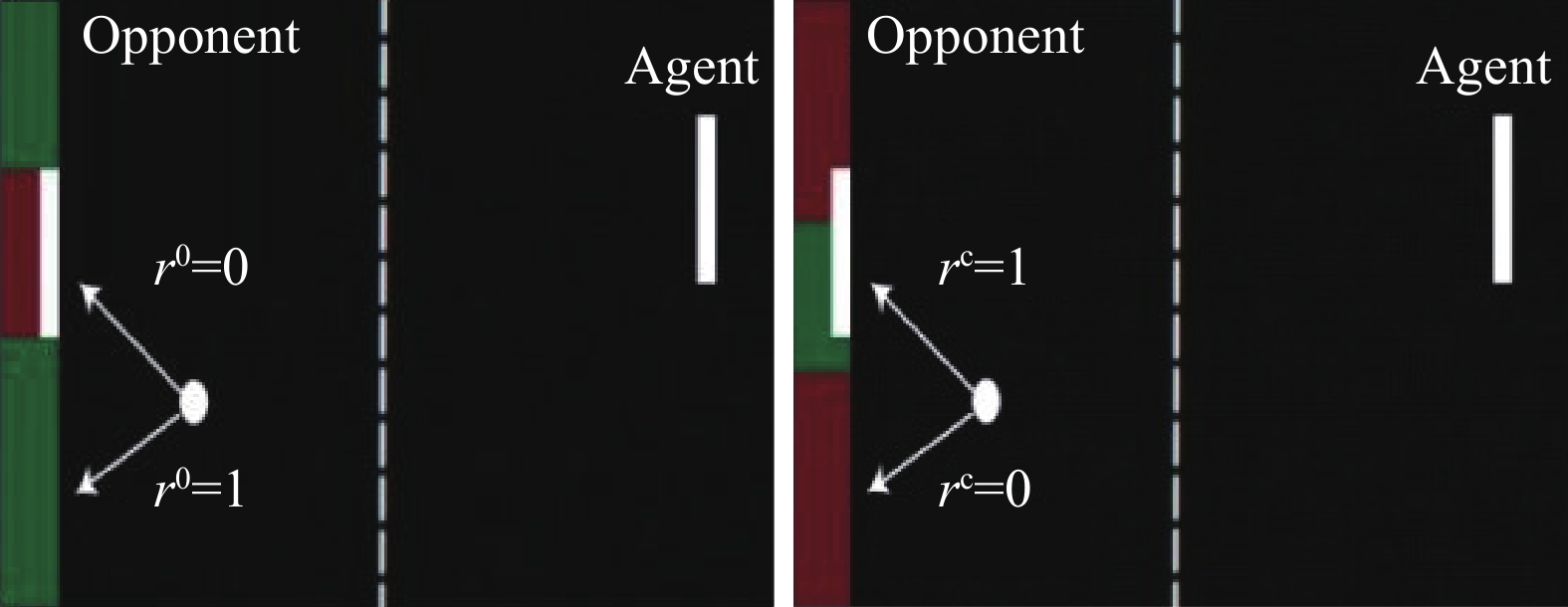
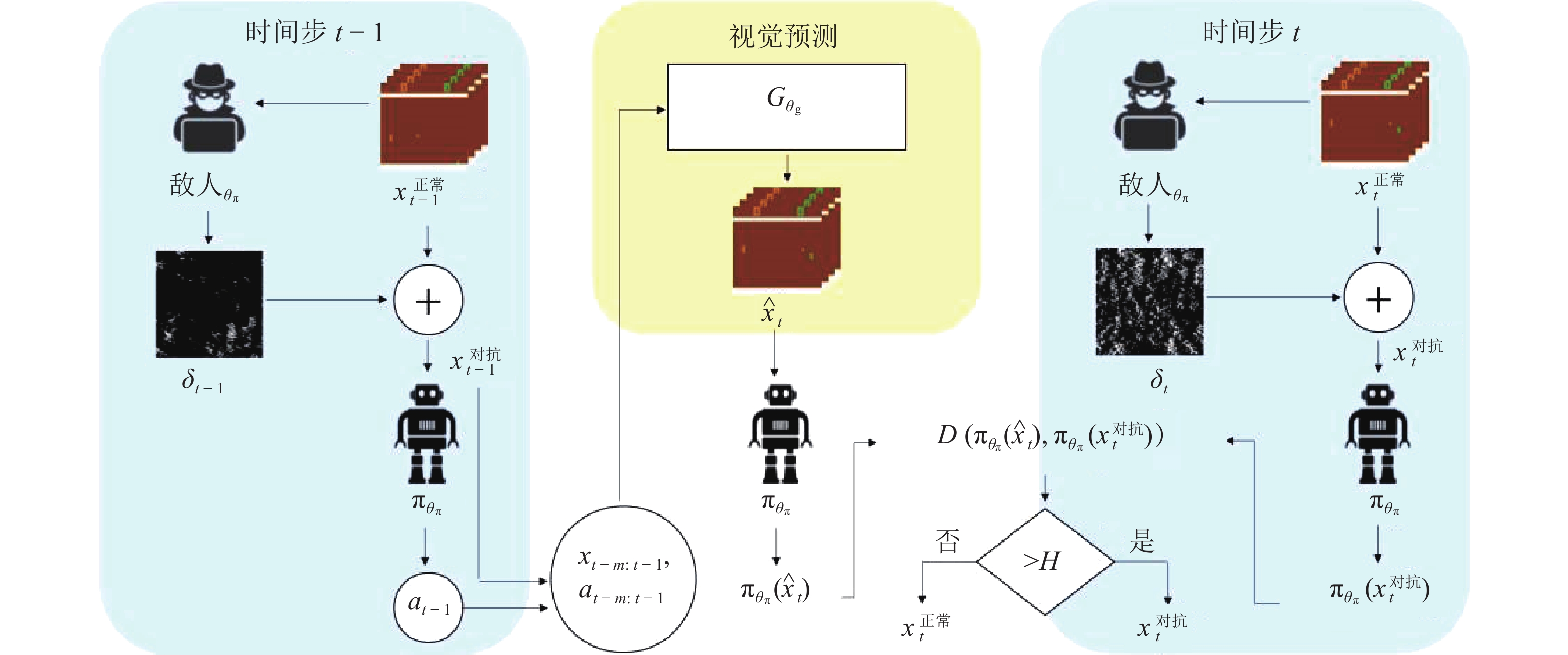
深度强化学习是人工智能领域新兴技术之一, 它将深度学习强大的特征提取能力与强化学习的决策能力相结合, 实现从感知输入到决策输出的端到端框架, 具有较强的学习能力且应用广泛. 然而, 已有研究表明深度强化学习存在安全漏洞, 容易受到对抗样本攻击. 为提高深度强化学习的鲁棒性、实现系统的安全应用, 本文针对已有的研究工作, 较全面地综述了深度强化学习方法、对抗攻击、防御方法与安全性分析, 并总结深度强化学习安全领域存在的开放问题以及未来发展的趋势, 旨在为从事相关安全研究与工程应用提供基础.


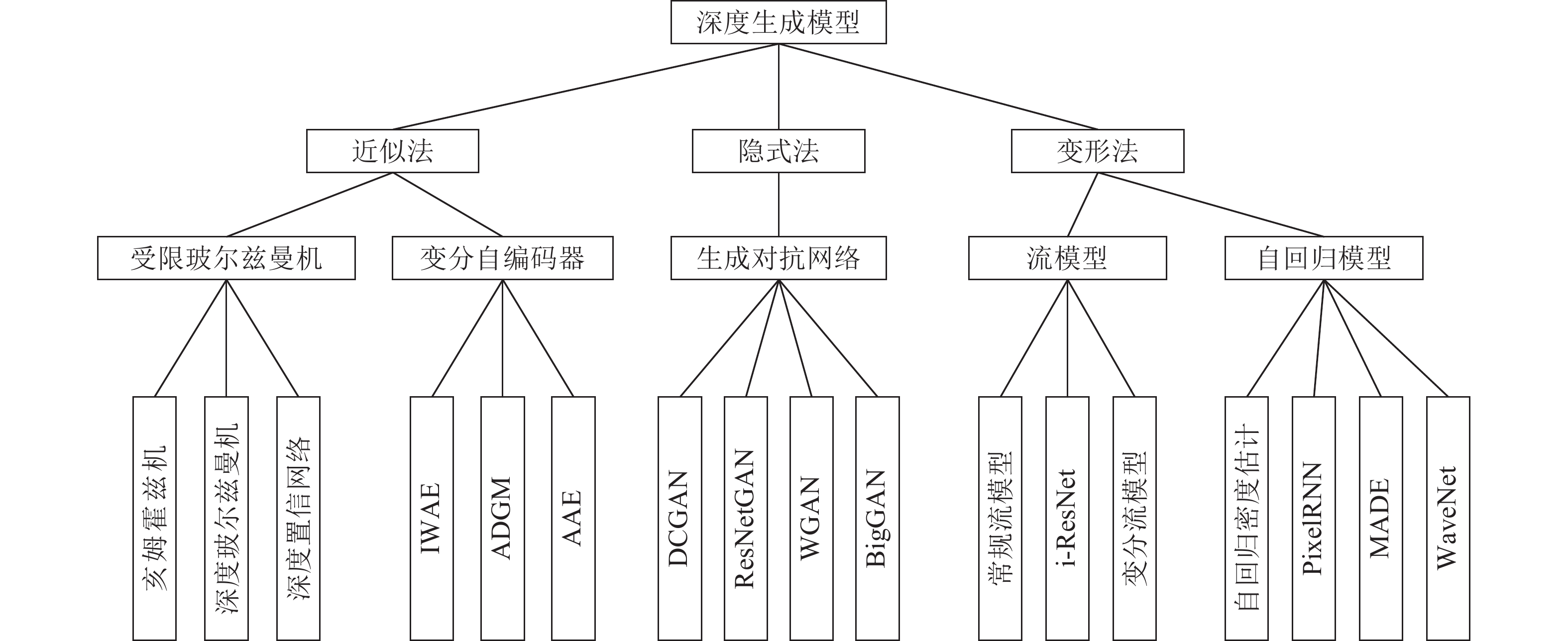
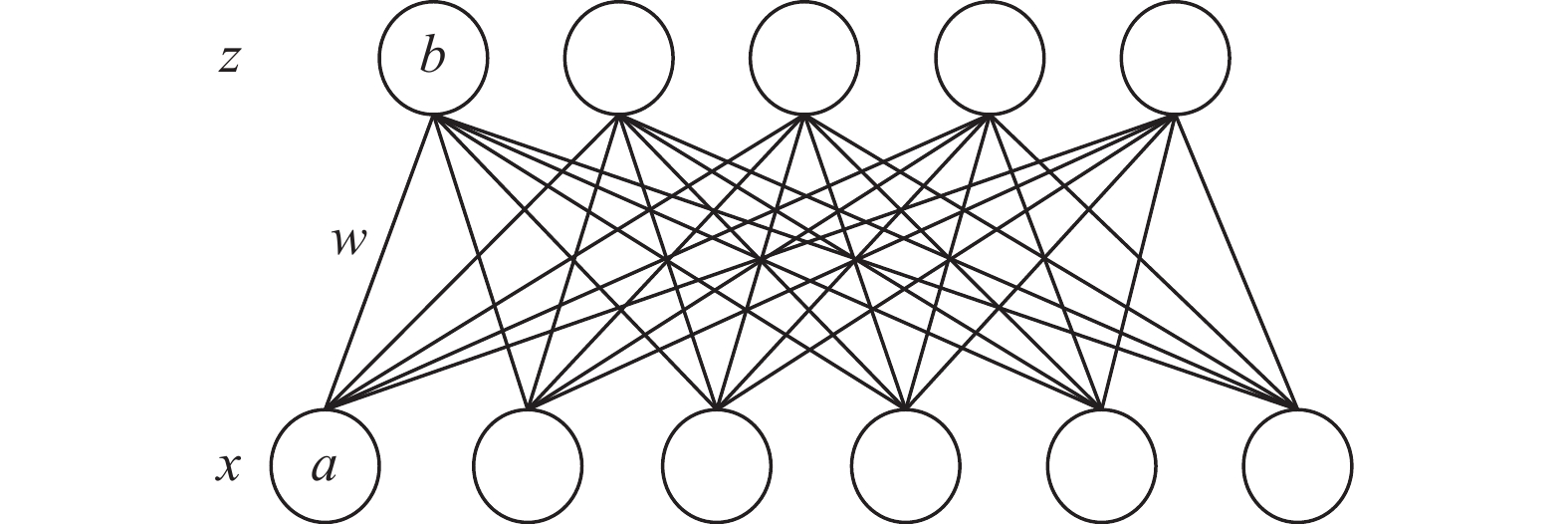
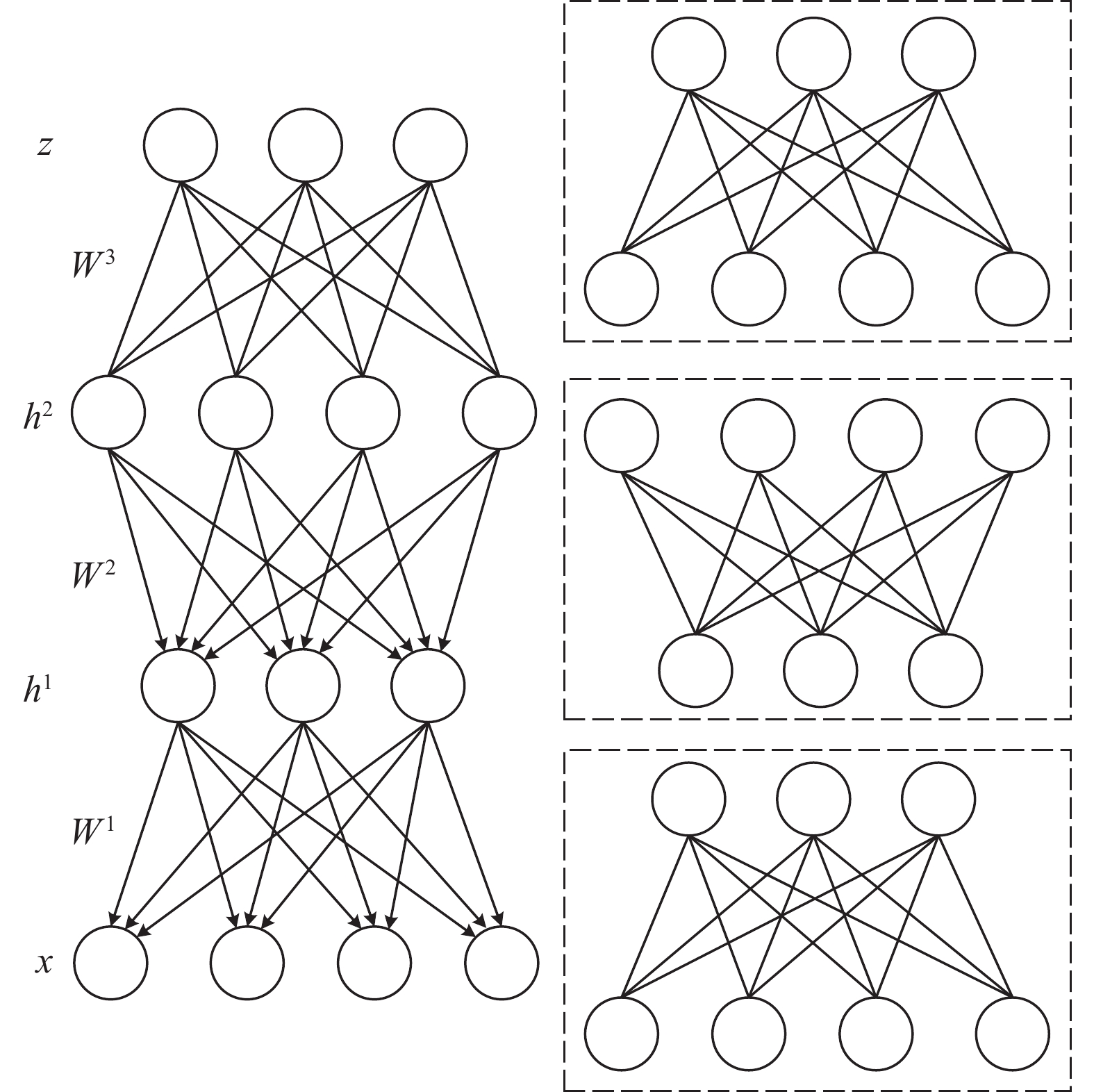
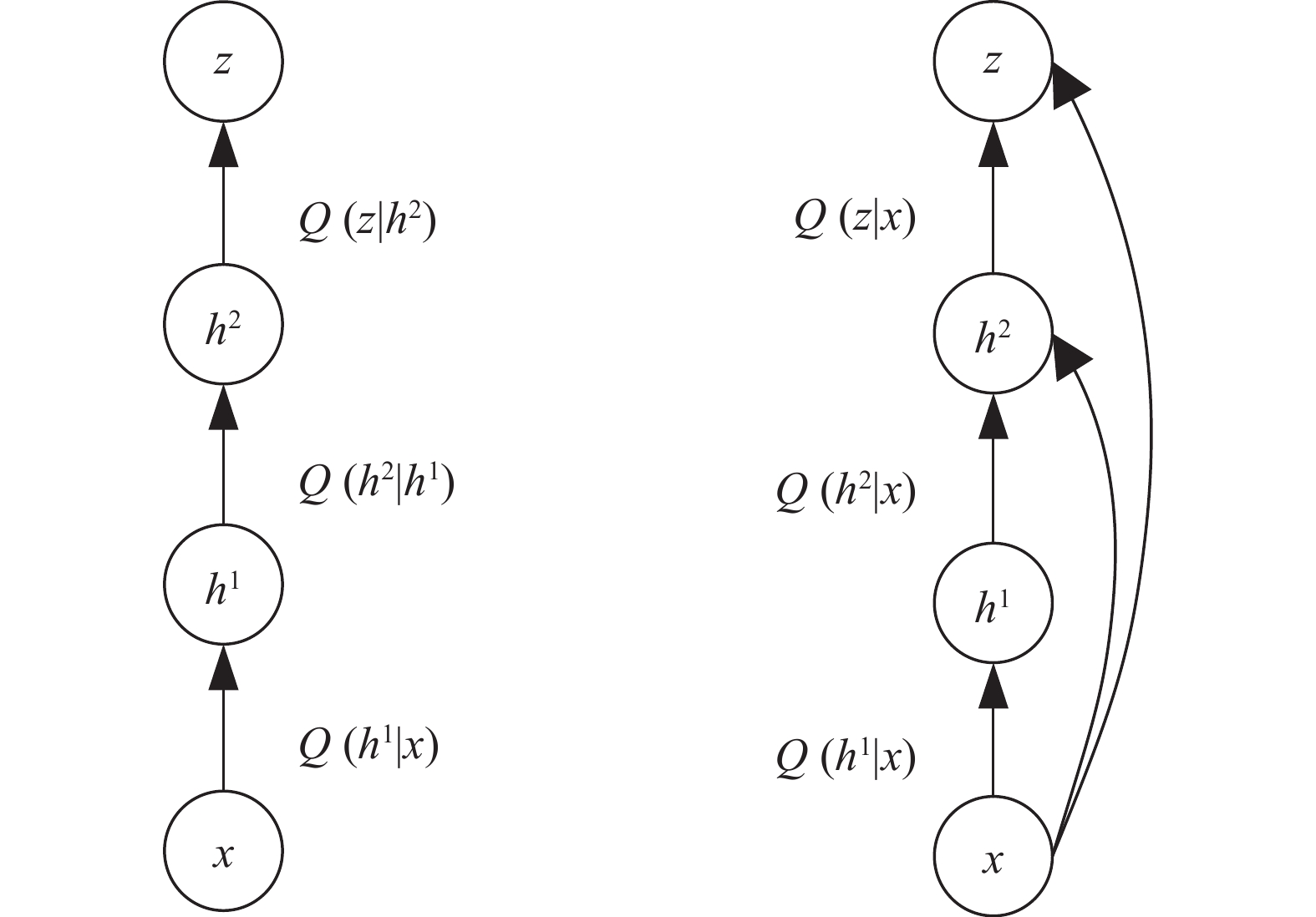
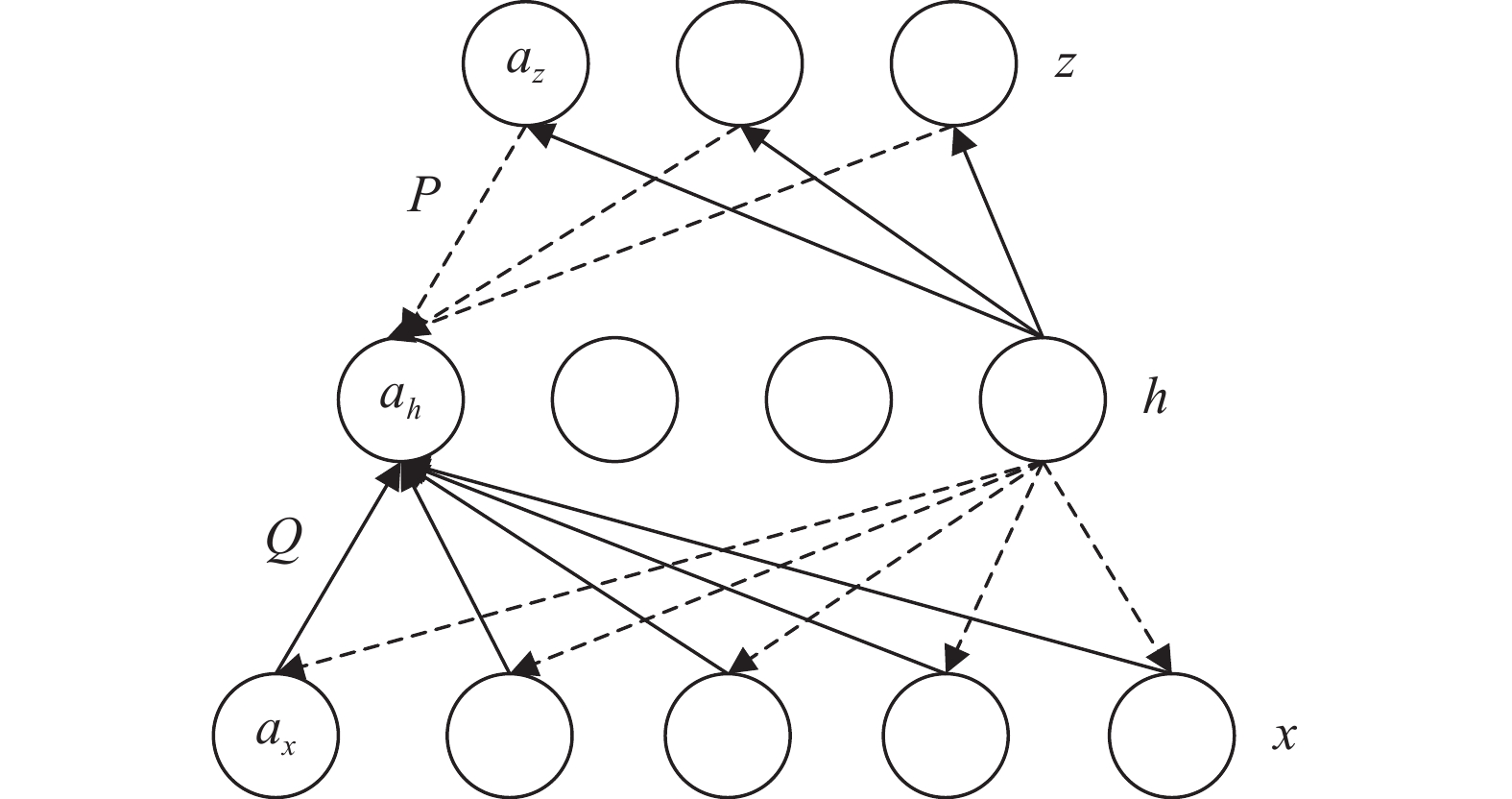
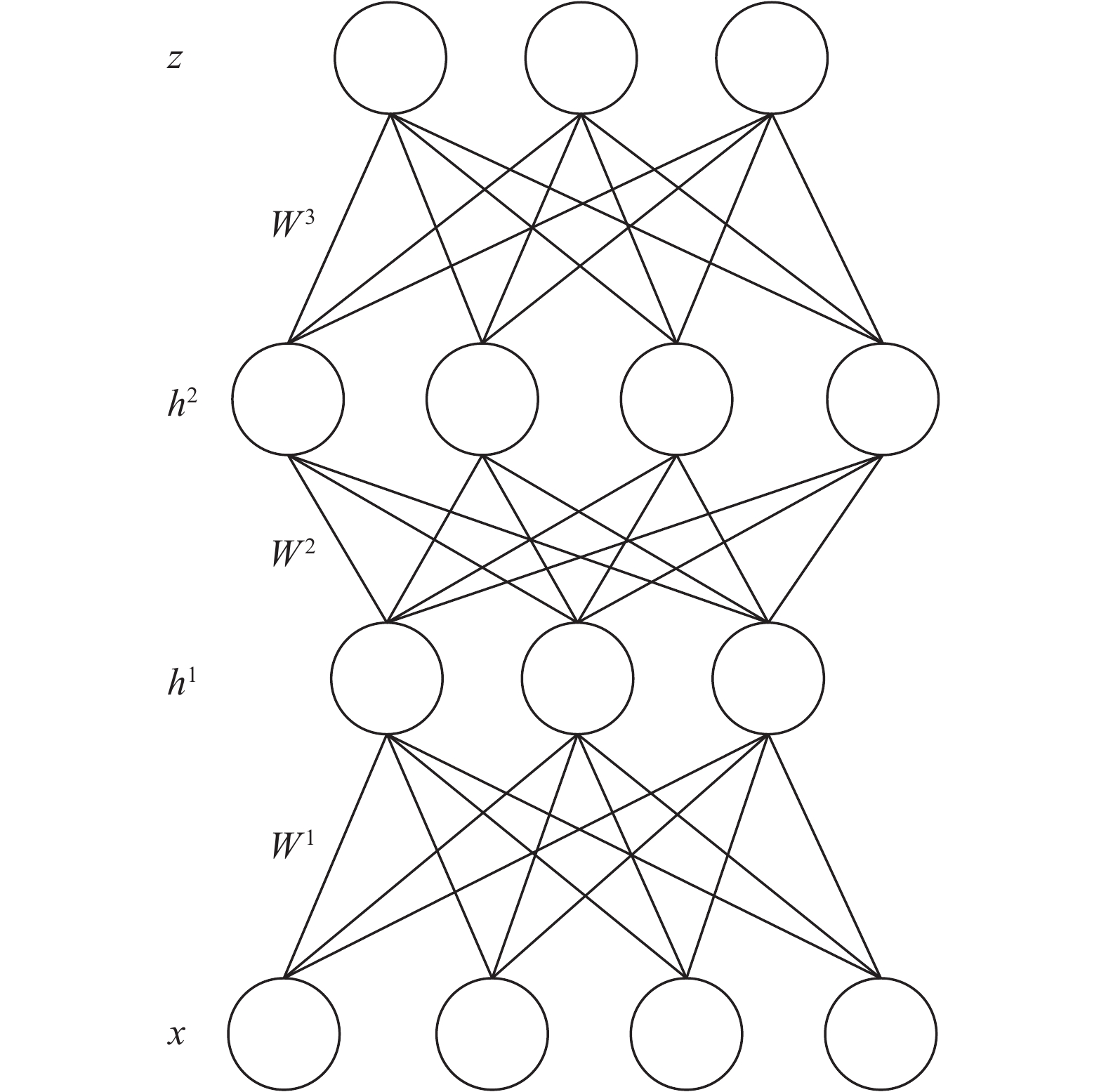
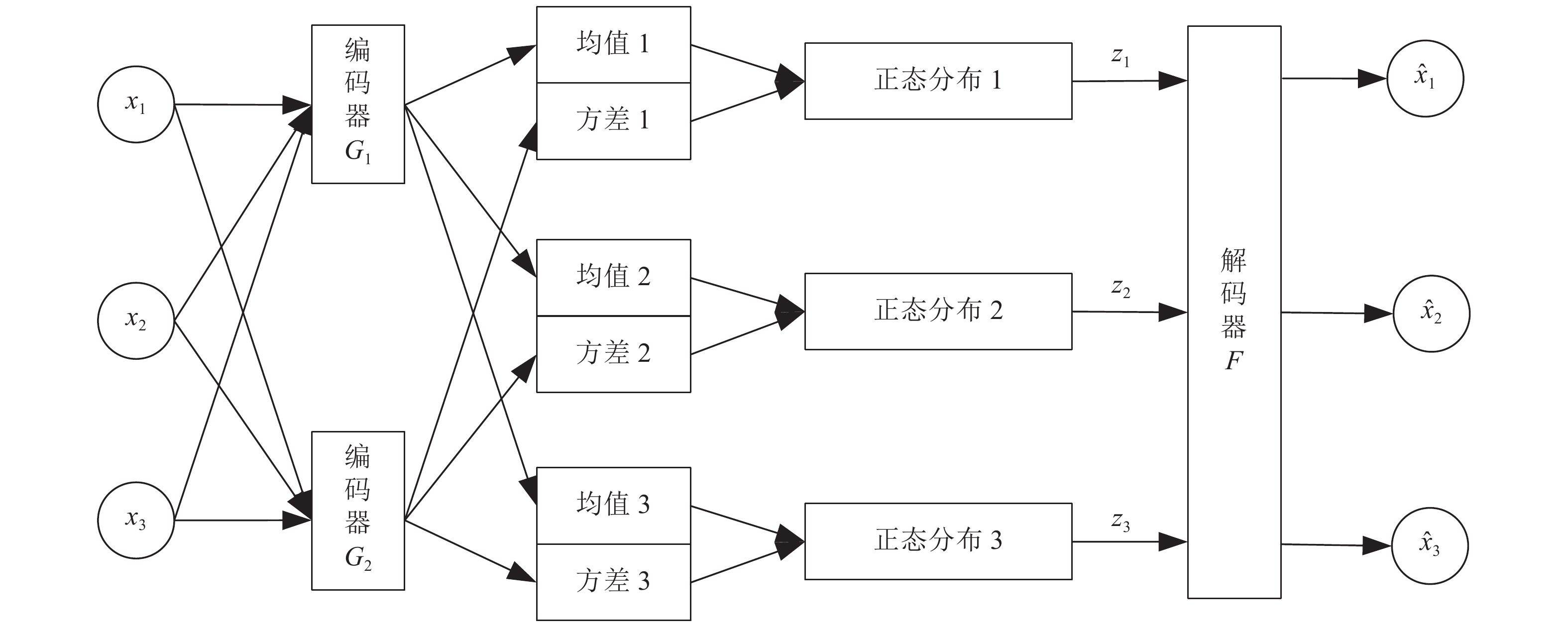
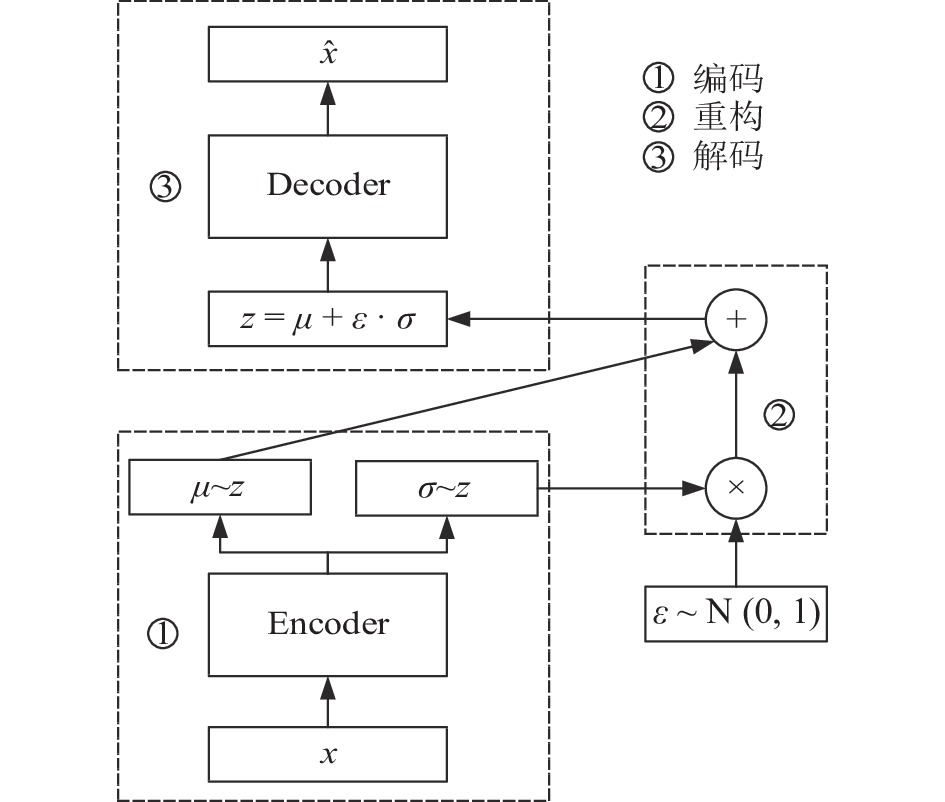
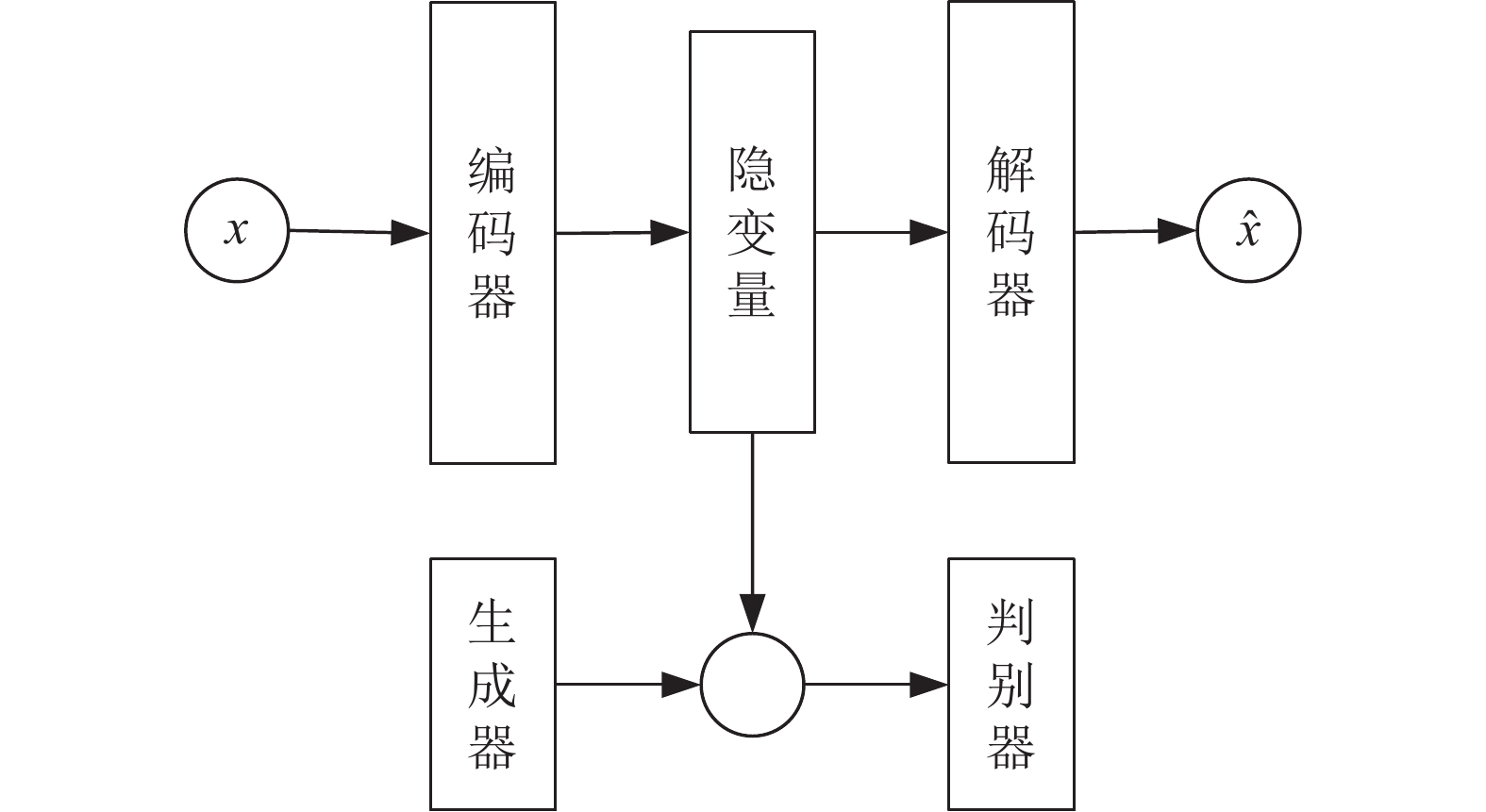
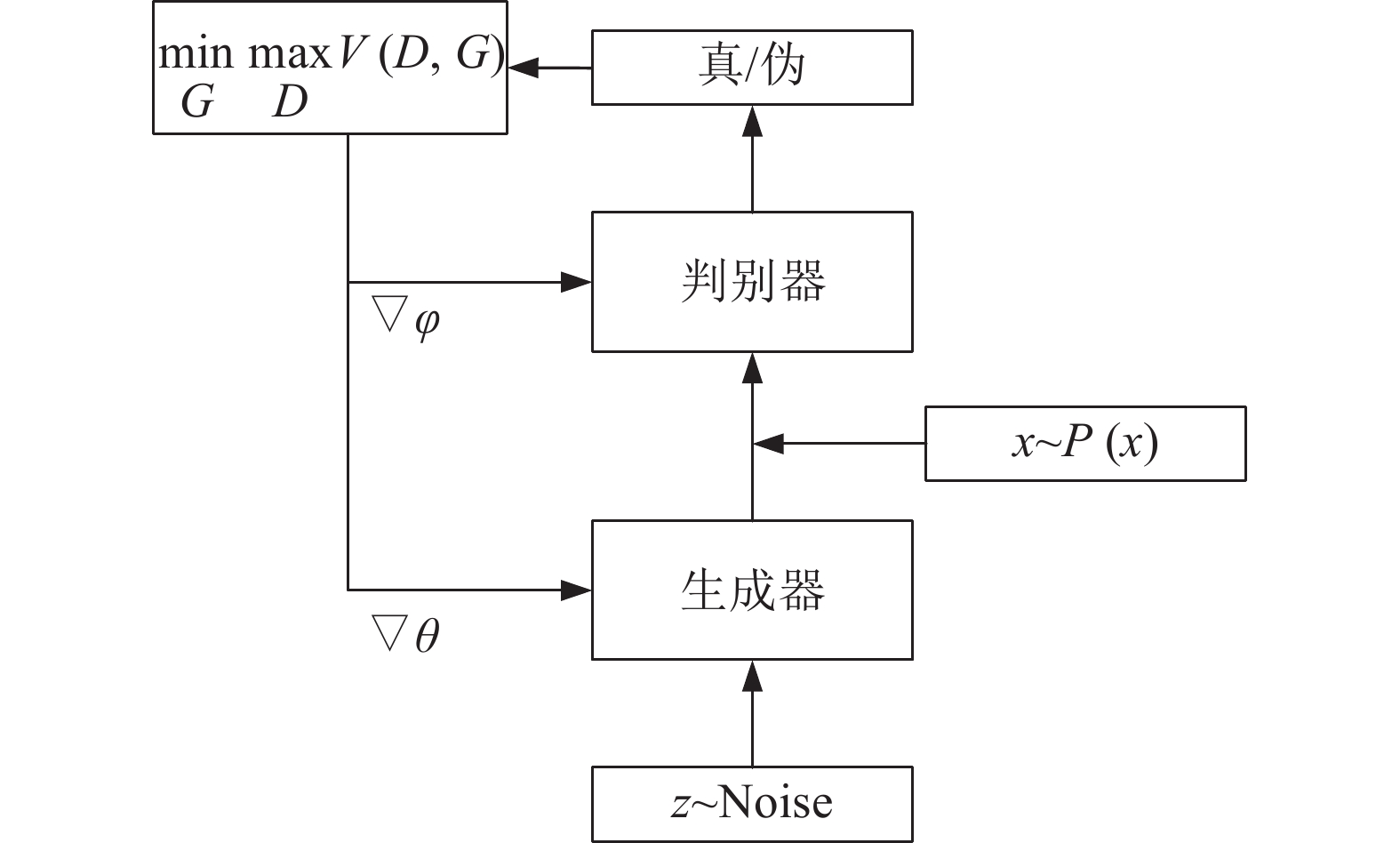
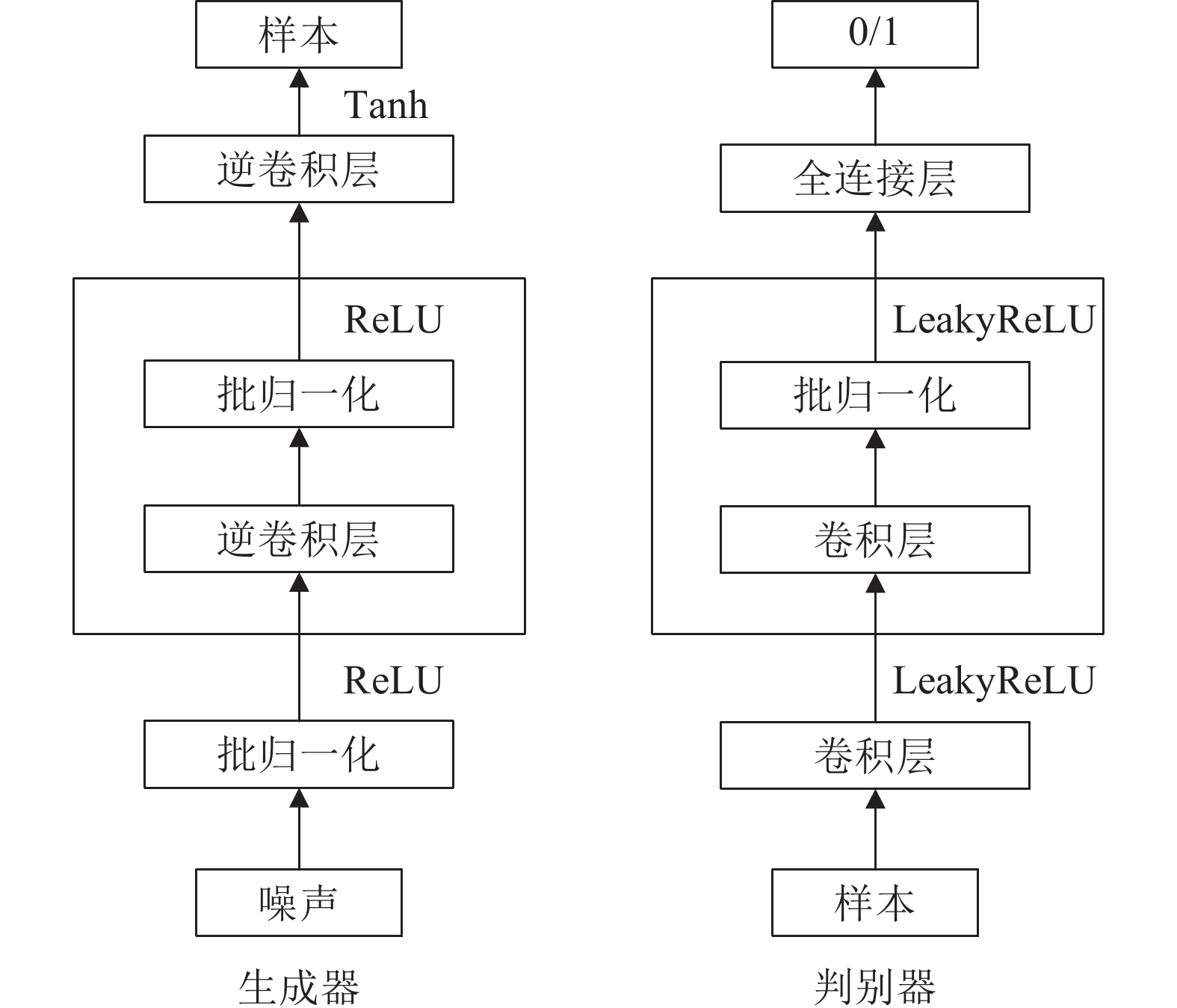
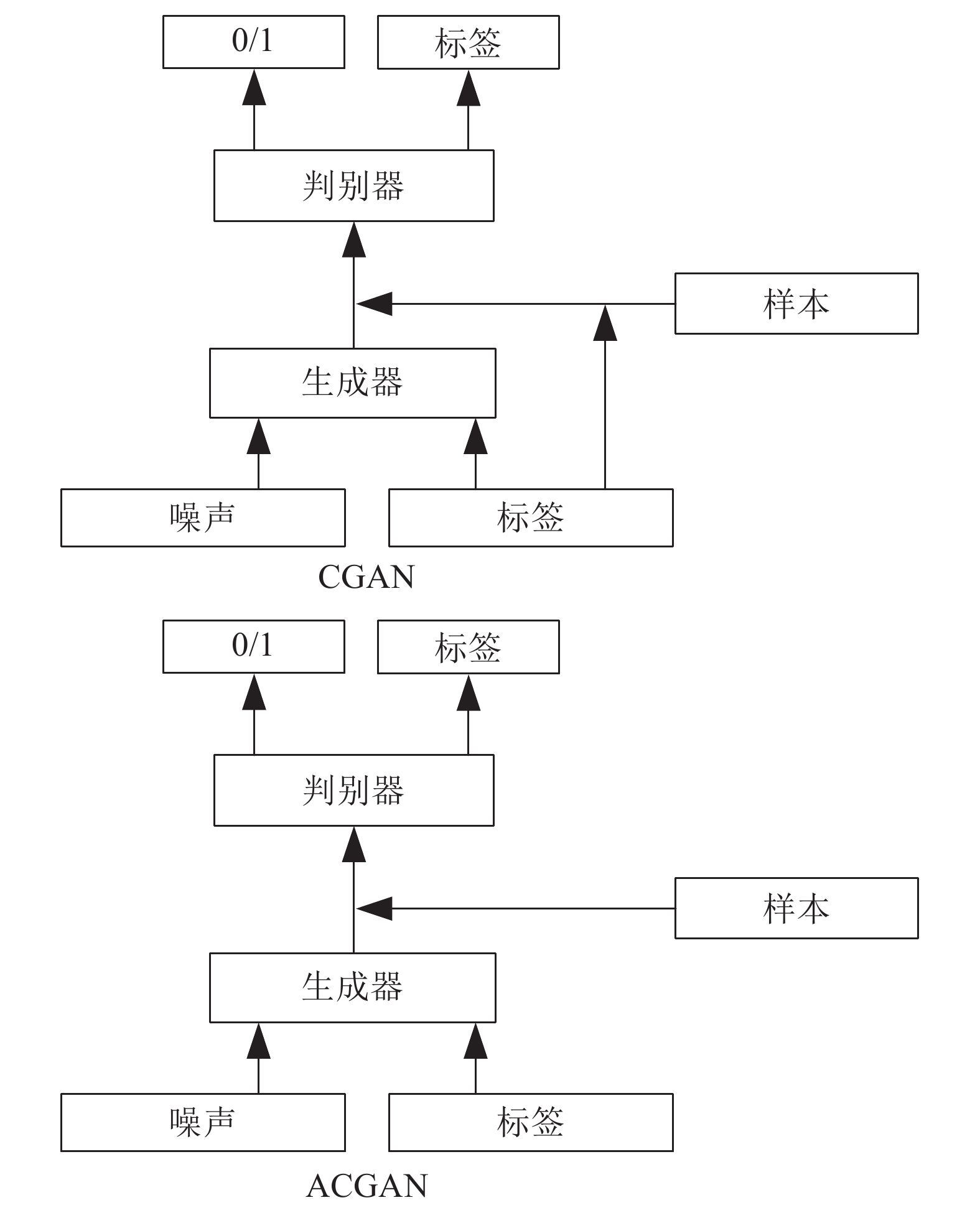
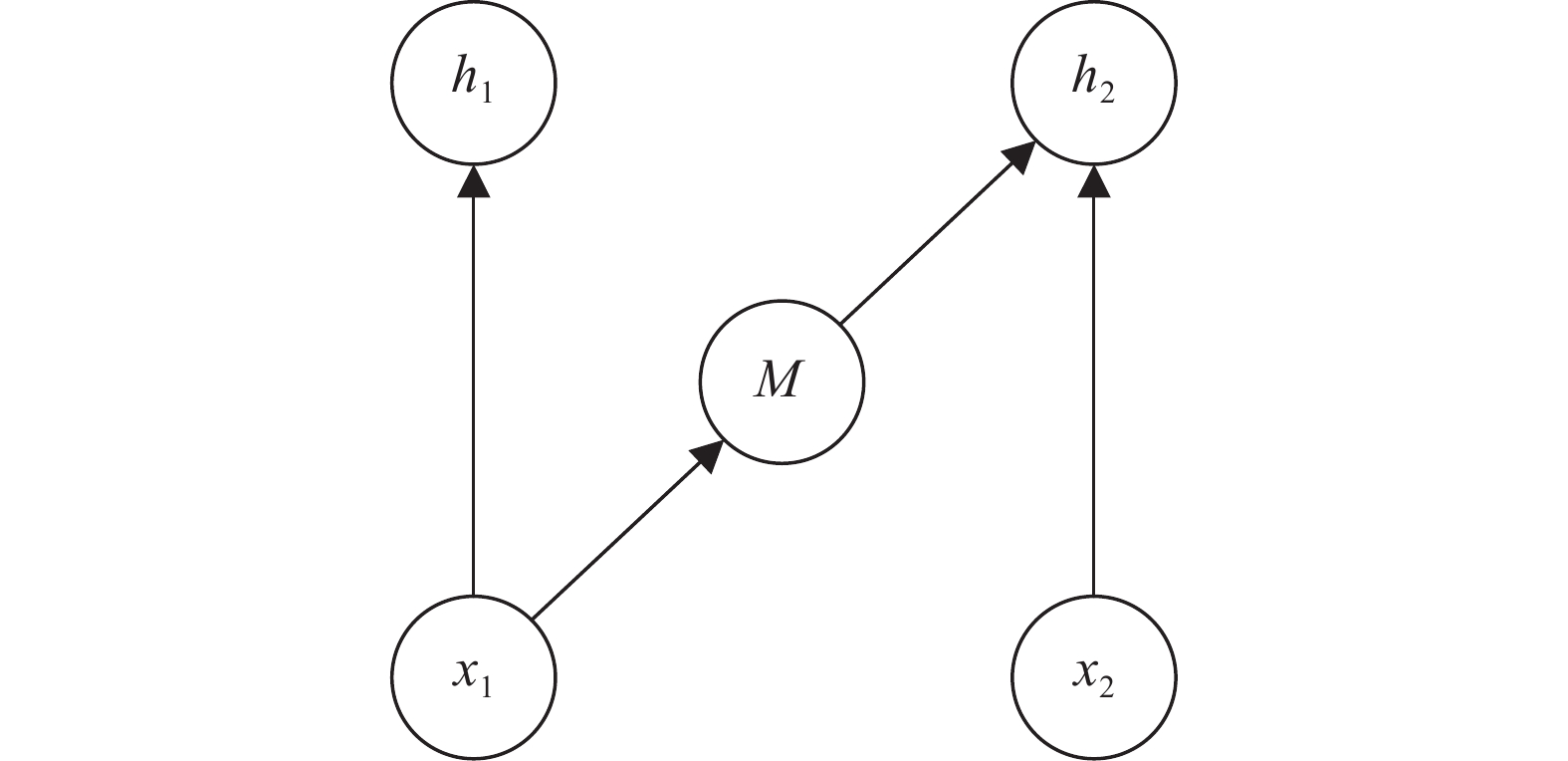
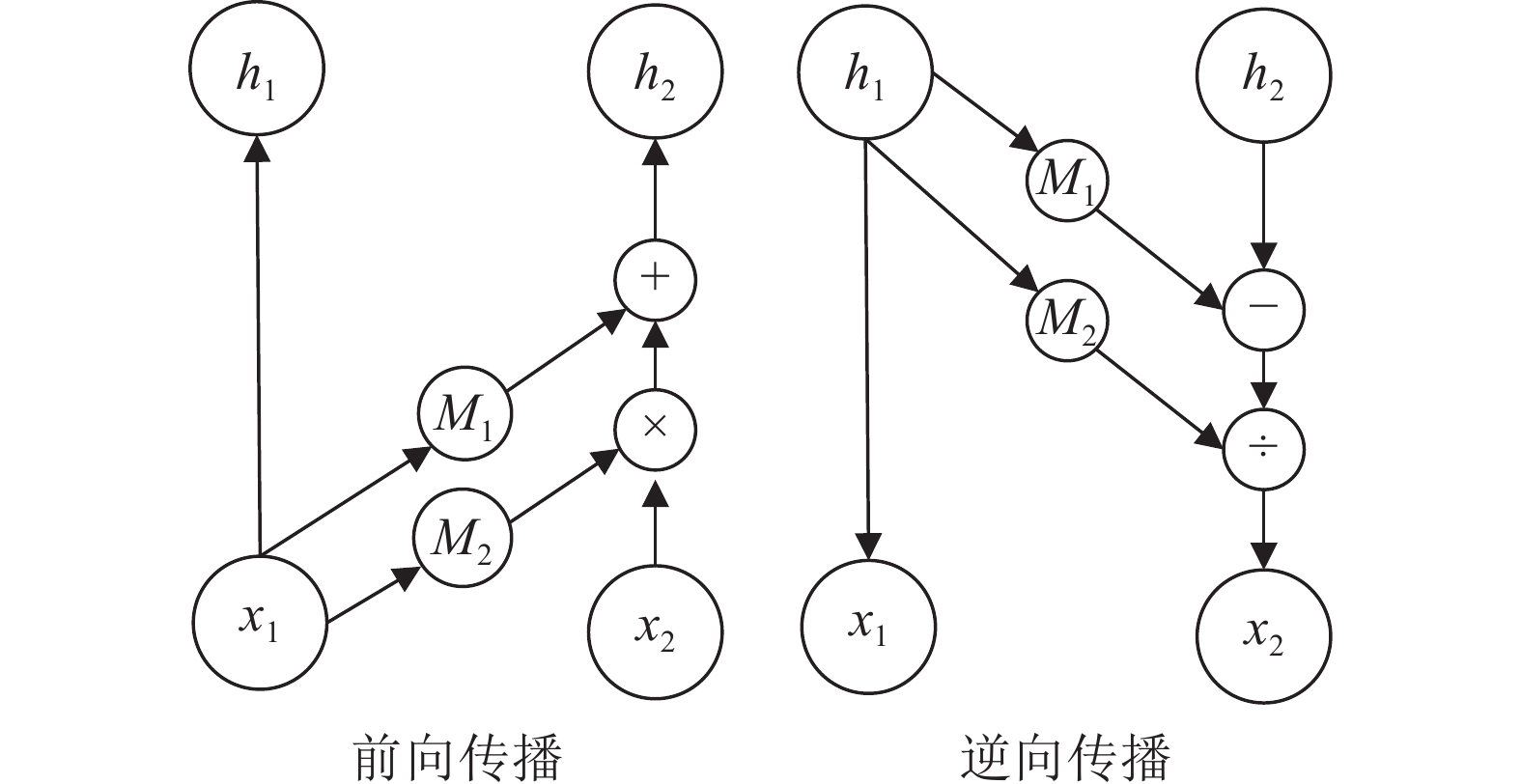
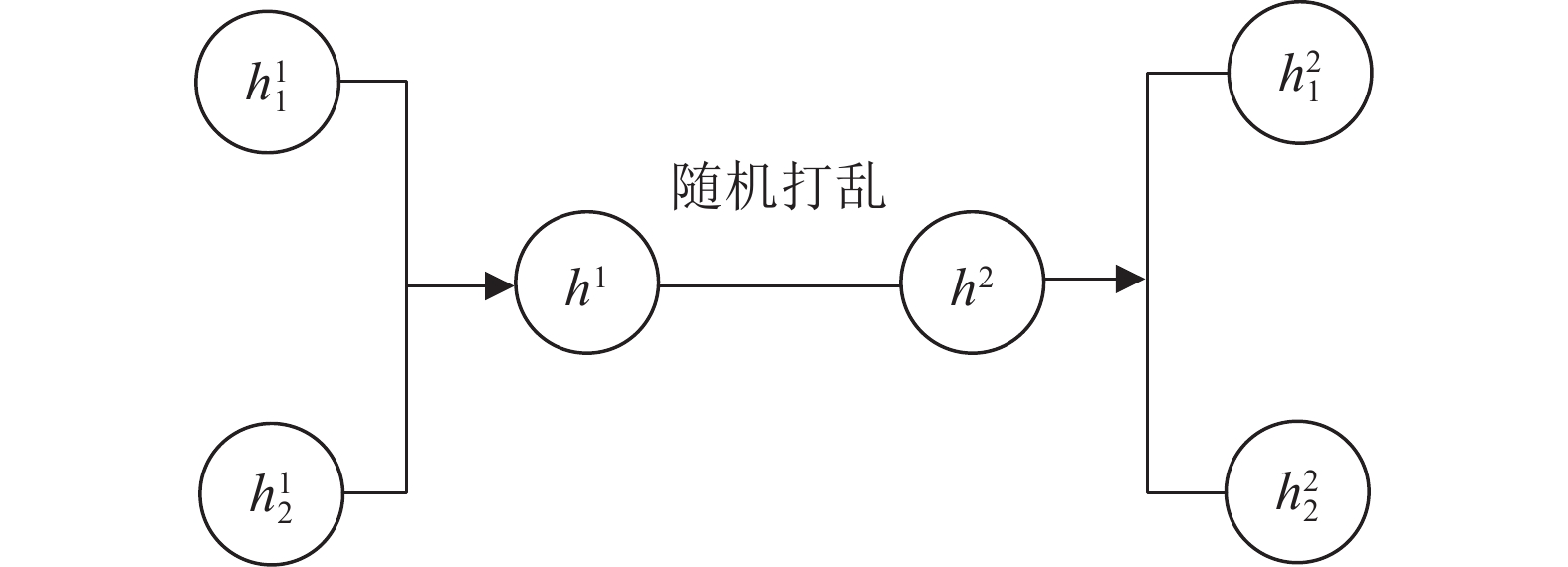
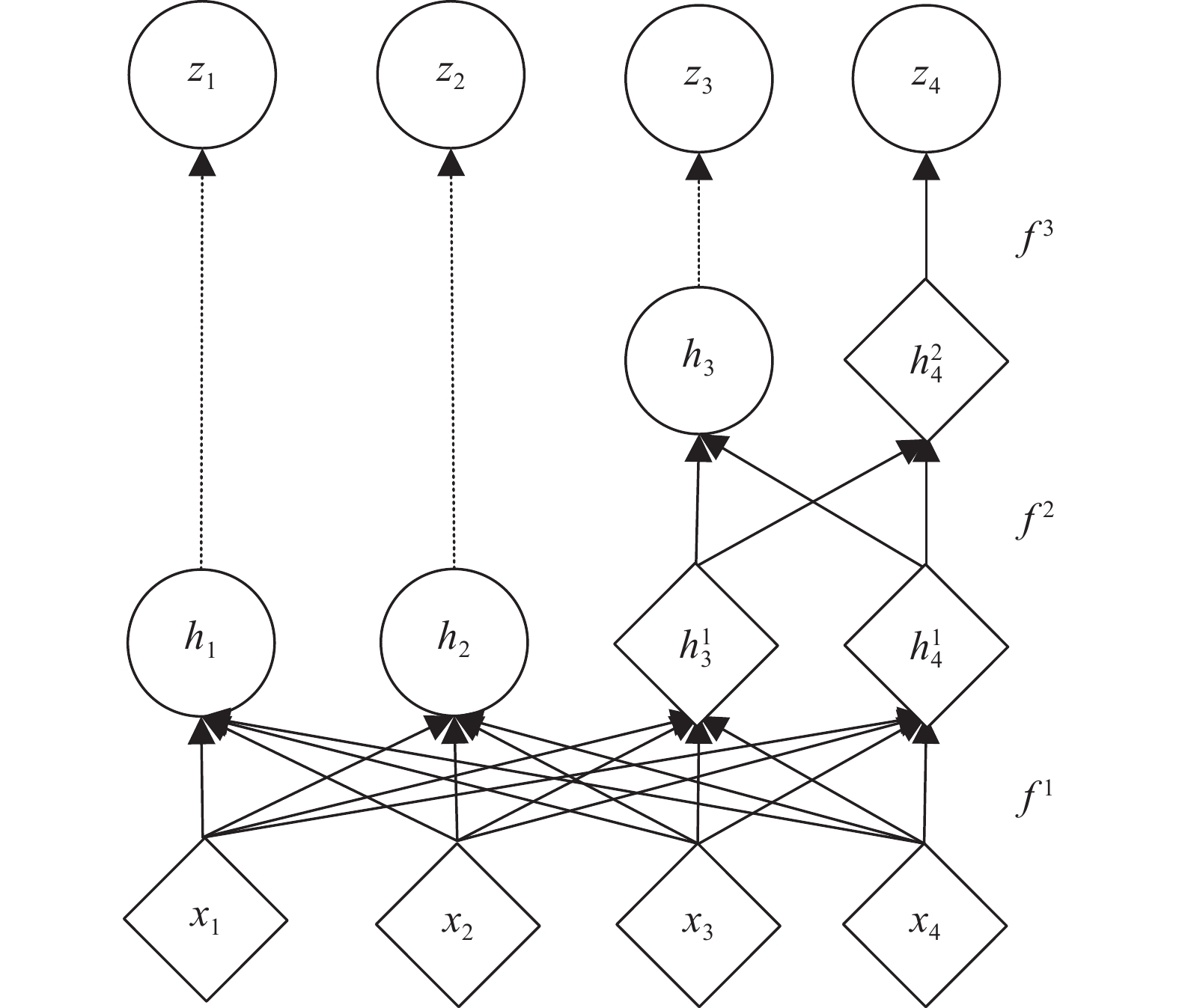
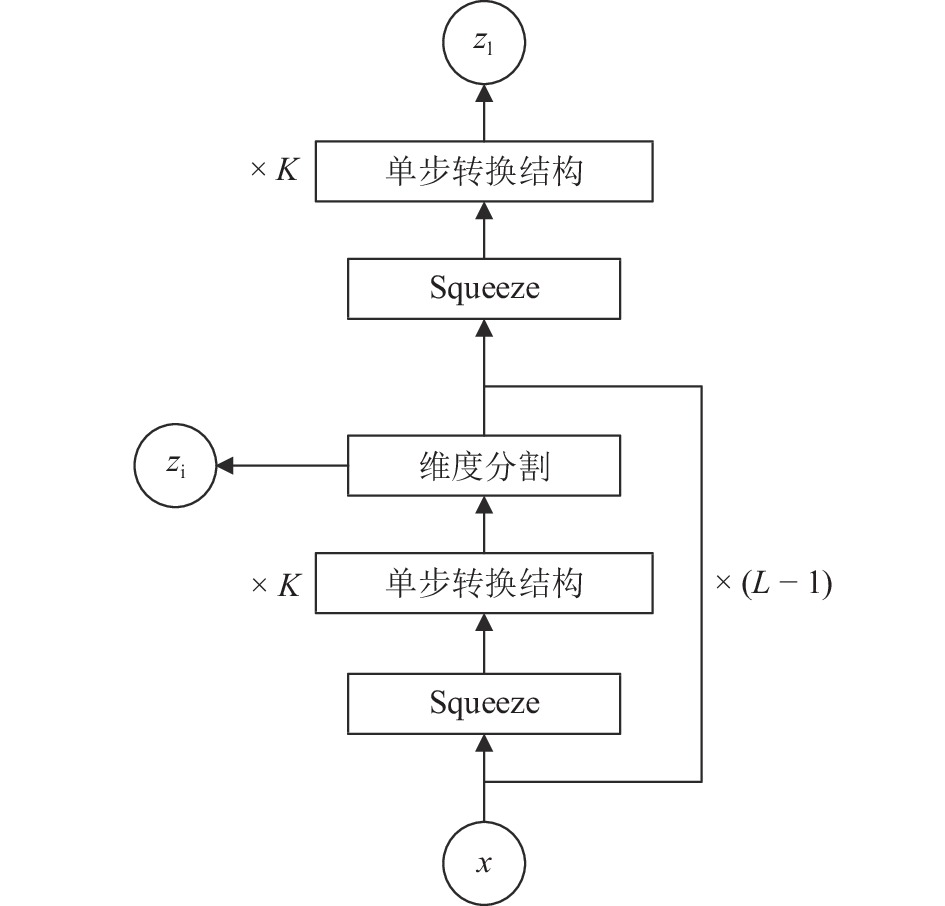
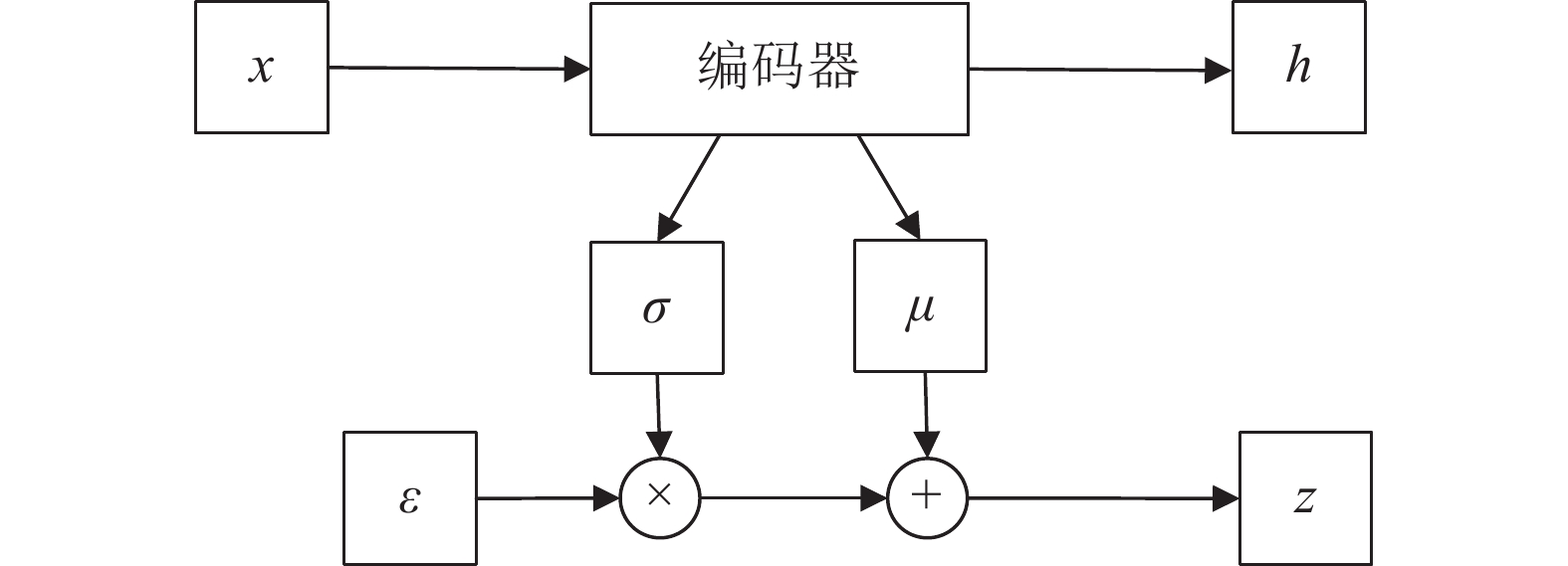
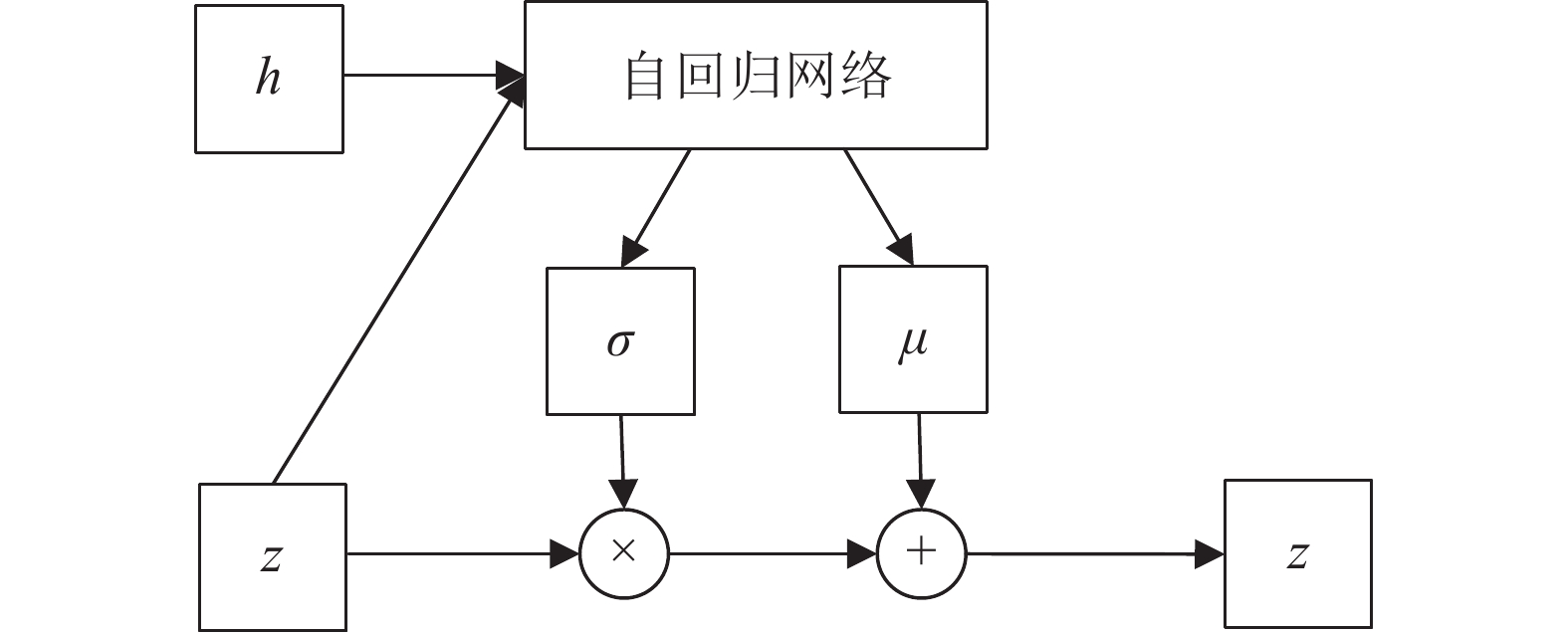
通过学习可观测数据的概率密度而随机生成样本的生成模型在近年来受到人们的广泛关注, 网络结构中包含多个隐藏层的深度生成式模型以更出色的生成能力成为研究热点, 深度生成模型在计算机视觉、密度估计、自然语言和语音识别、半监督学习等领域得到成功应用, 并给无监督学习提供了良好的范式. 本文根据深度生成模型处理似然函数的不同方法将模型分为三类: 第一类方法是近似方法, 包括采用抽样方法近似计算似然函数的受限玻尔兹曼机(Restricted Boltzmann machine, RBM)和以受限玻尔兹曼机为基础模块的深度置信网络(Deep belief network, DBN)、深度玻尔兹曼机(Deep Boltzmann machines, DBM)和亥姆霍兹机, 与之对应的另一种模型是直接优化似然函数变分下界的变分自编码器以及其重要的改进模型, 包括重要性加权自编码和可用于半监督学习的深度辅助深度模型; 第二类方法是避开求极大似然过程的隐式方法, 其代表模型是通过生成器和判别器之间的对抗行为来优化模型参数从而巧妙避开求解似然函数的生成对抗网络以及重要的改进模型, 包括WGAN、深度卷积生成对抗网络和当前最顶级的深度生成模型BigGAN; 第三类方法是对似然函数进行适当变形的流模型和自回归模型, 流模型利用可逆函数构造似然函数后直接优化模型参数, 包括以NICE为基础的常规流模型、变分流模型和可逆残差网络(i-ResNet), 自回归模型(NADE)将目标函数分解为条件概率乘积的形式, 包括神经自回归密度估计(NADE)、像素循环神经网络(PixelRNN)、掩码自编码器(MADE)以及WaveNet等. 详细描述上述模型的原理和结构以及模型变形后, 阐述各个模型的研究进展和应用, 最后对深度生成式模型进行展望和总结.



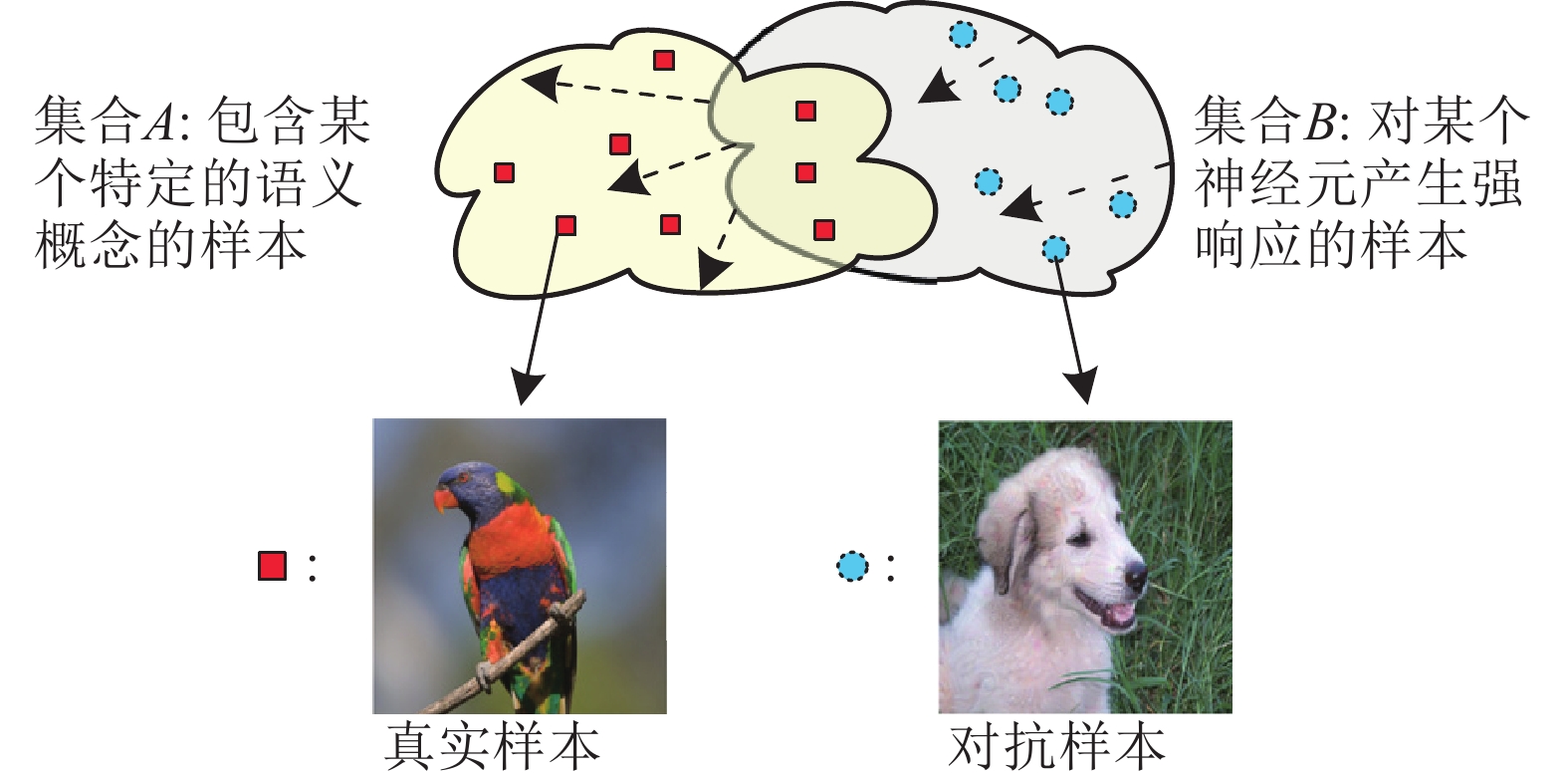
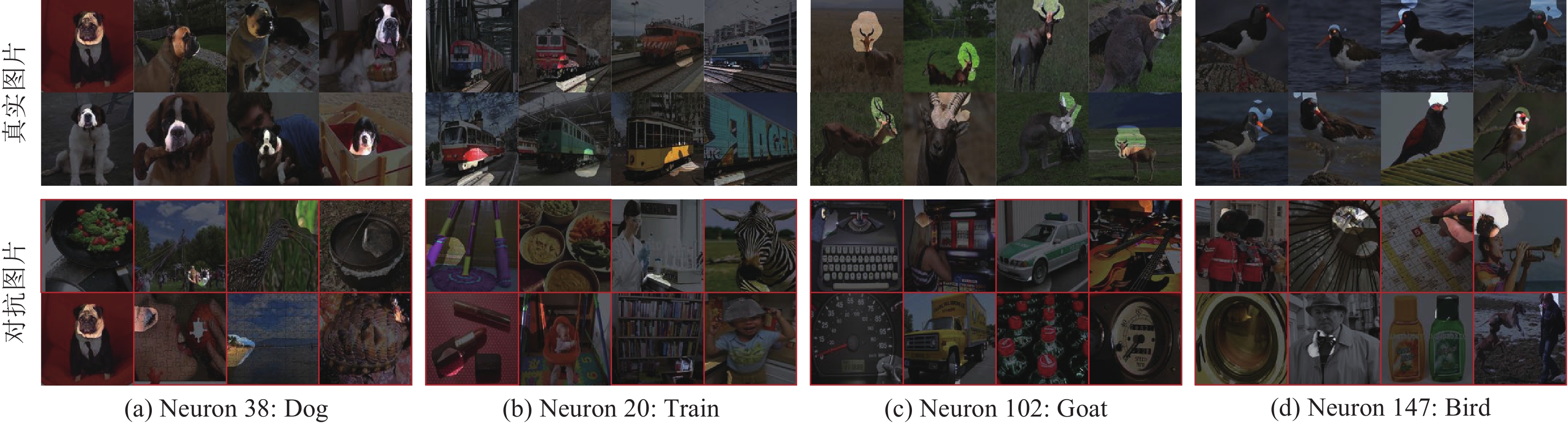
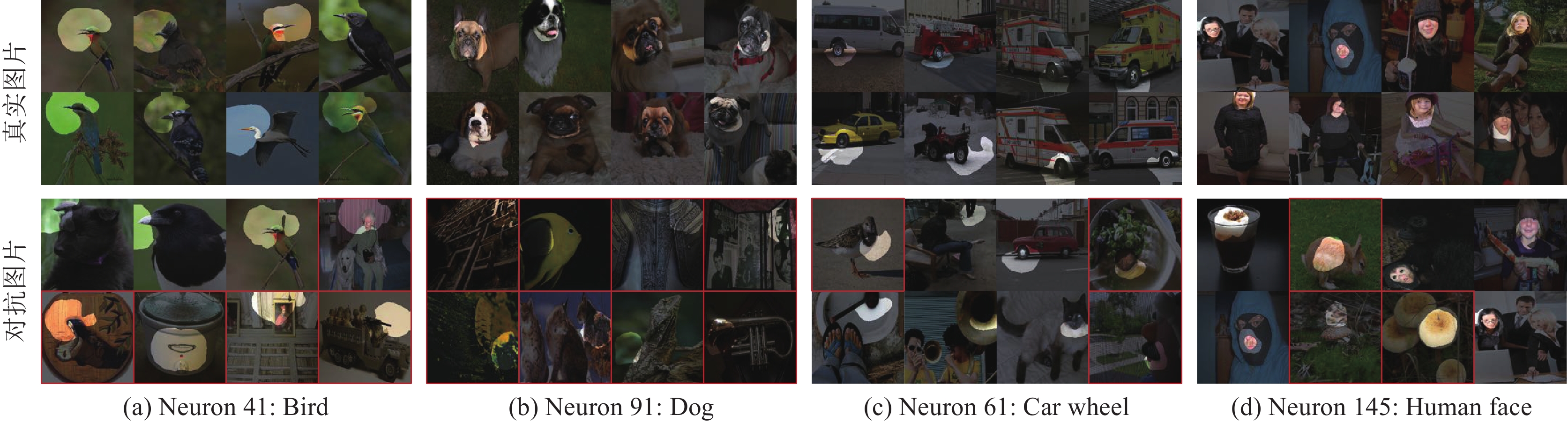
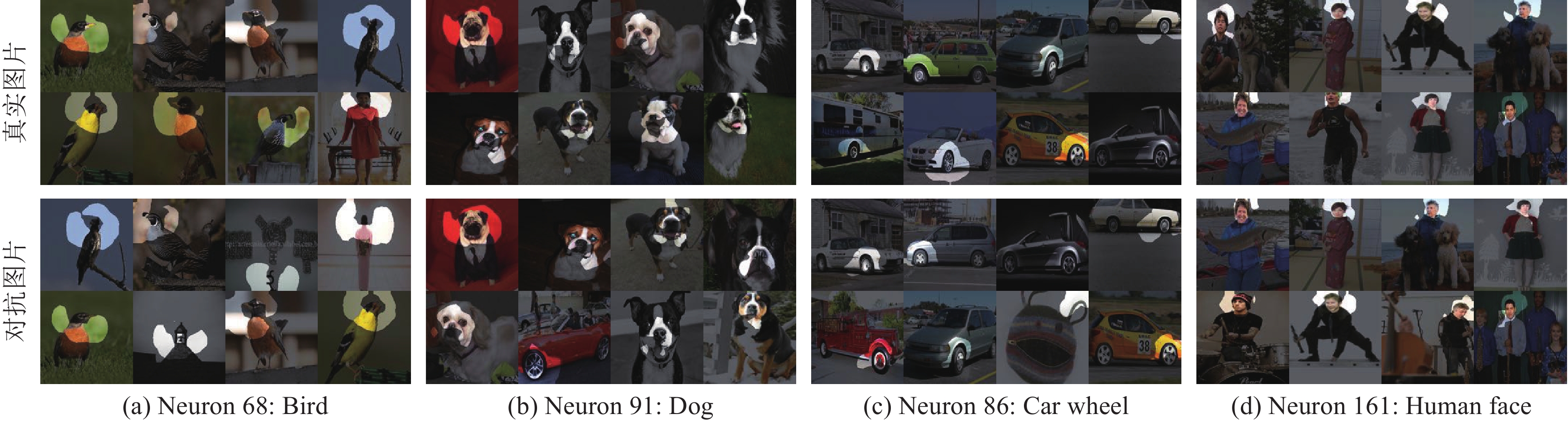
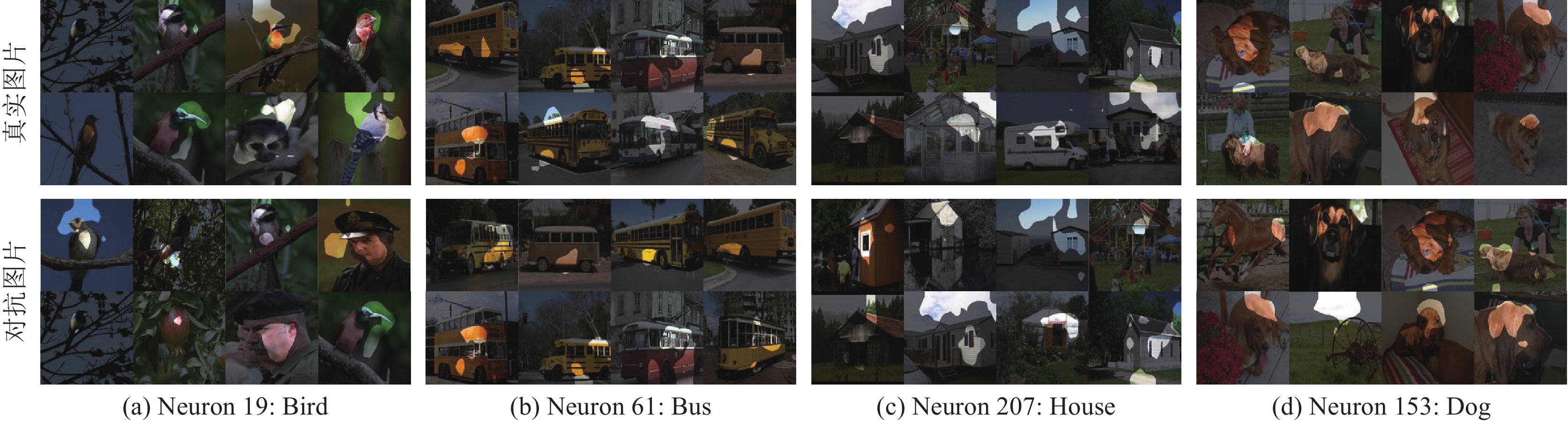
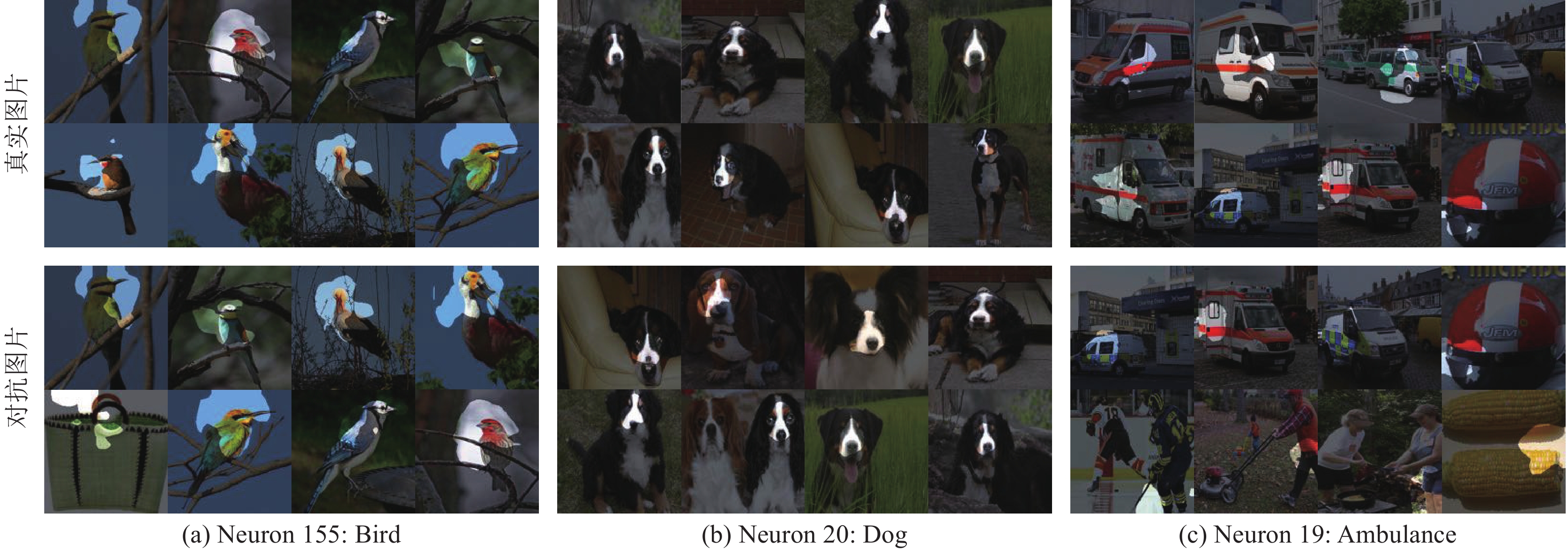
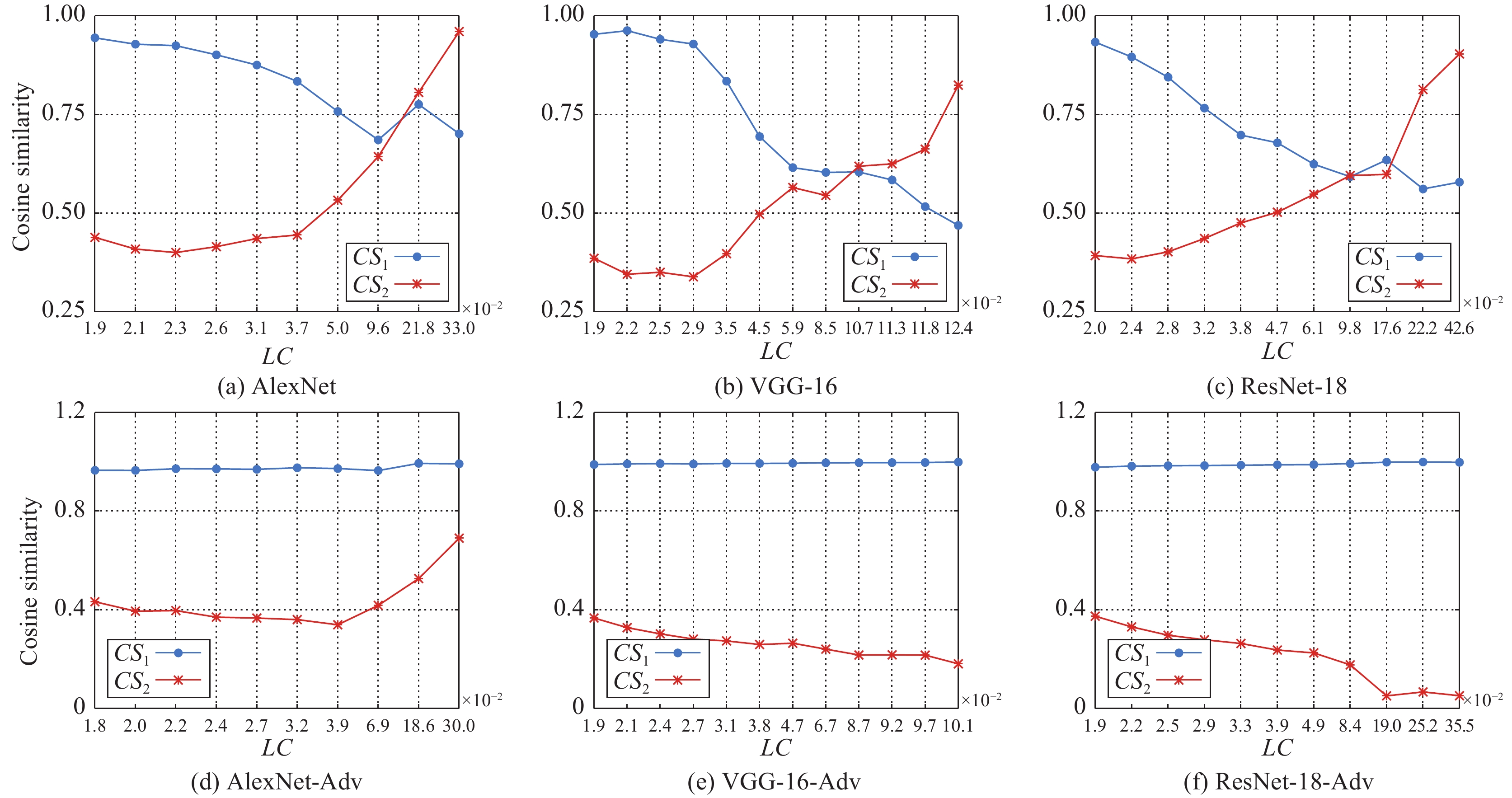
虽然深度神经网络 (Deep neural networks, DNNs) 在许多任务上取得了显著的效果, 但是由于其可解释性 (Interpretability) 较差, 通常被当做“黑盒”模型. 本文针对图像分类任务, 利用对抗样本 (Adversarial examples) 从模型失败的角度检验深度神经网络内部的特征表示. 通过分析, 发现深度神经网络学习到的特征表示与人类所理解的语义概念之间存在着不一致性. 这使得理解和解释深度神经网络内部的特征变得十分困难. 为了实现可解释的深度神经网络, 使其中的神经元具有更加明确的语义内涵, 本文提出了加入特征表示一致性损失的对抗训练方式. 实验结果表明该训练方式可以使深度神经网络内部的特征表示与人类所理解的语义概念更加一致.



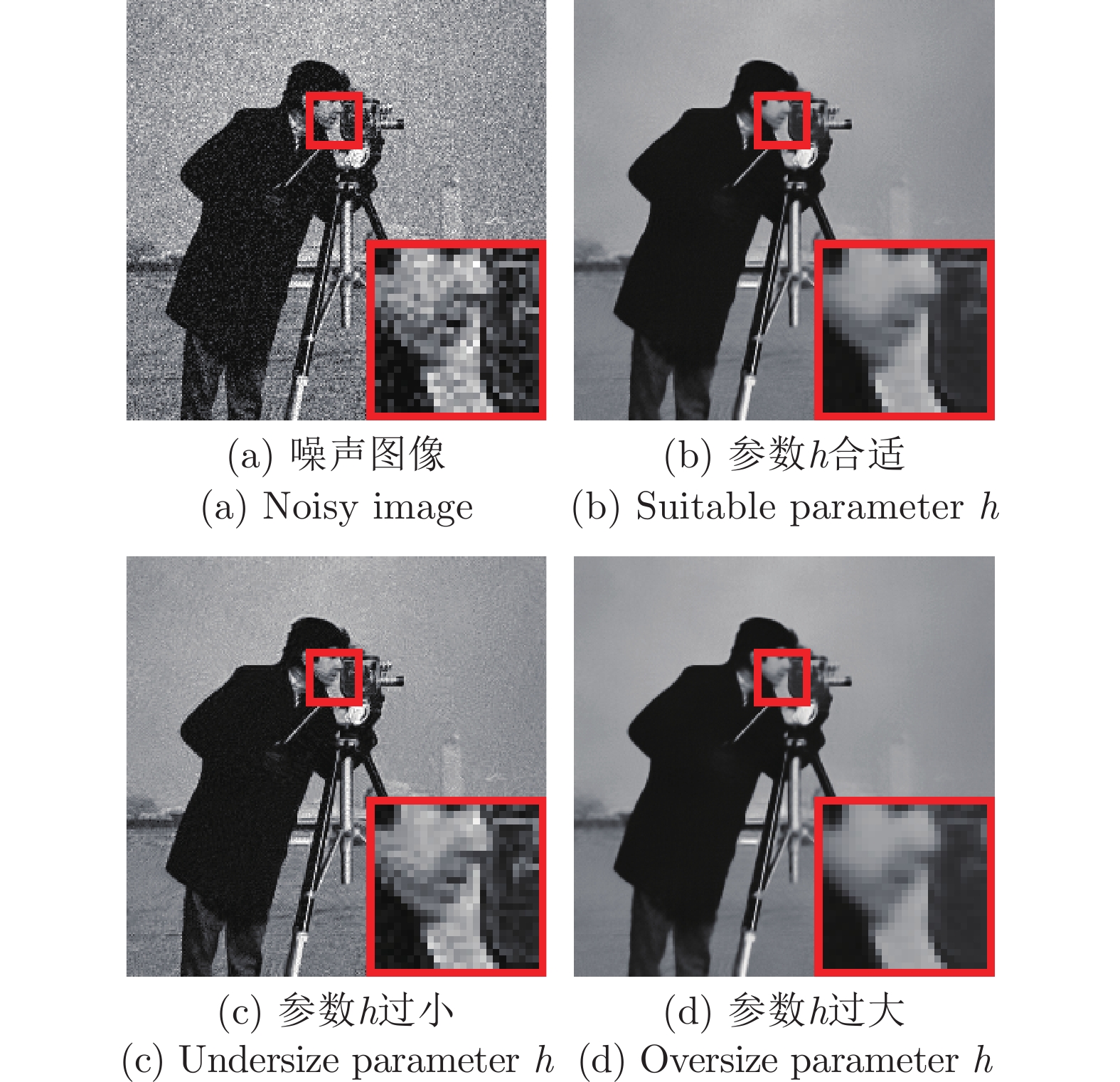
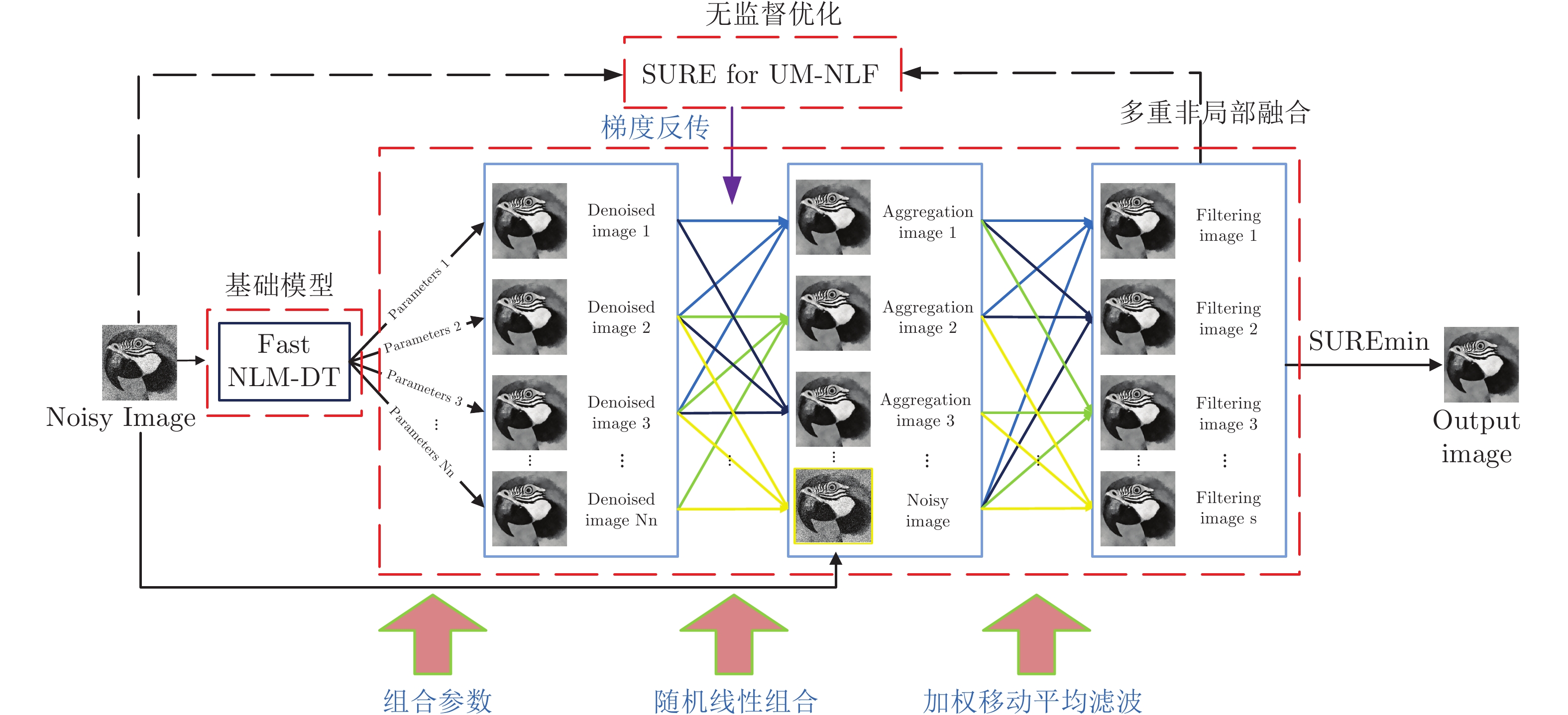
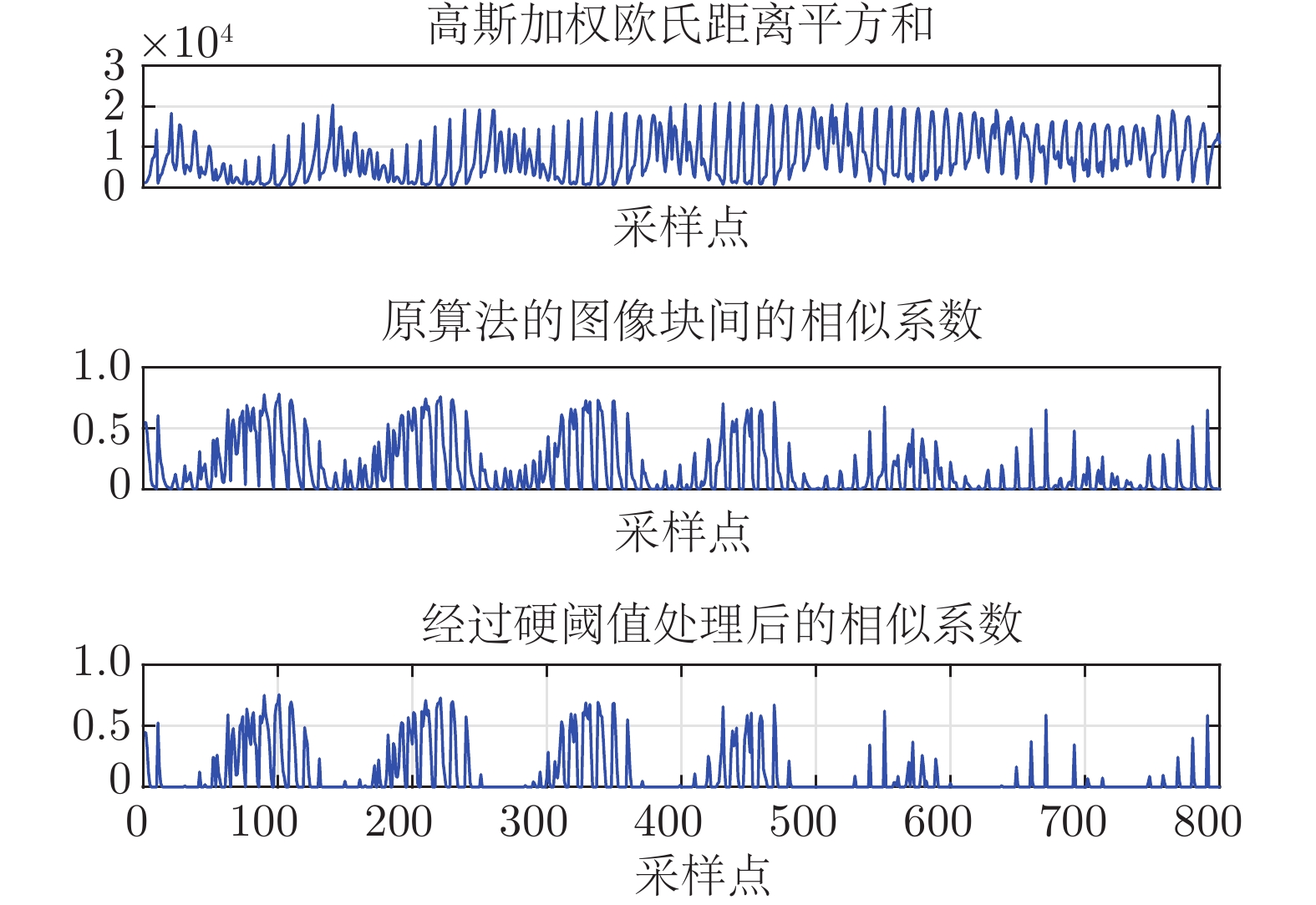
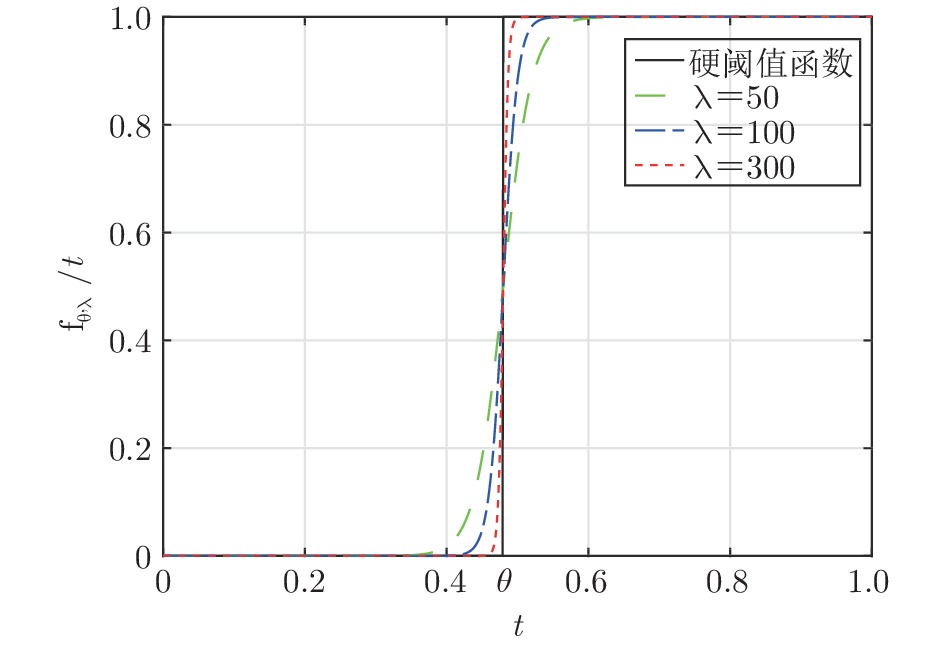
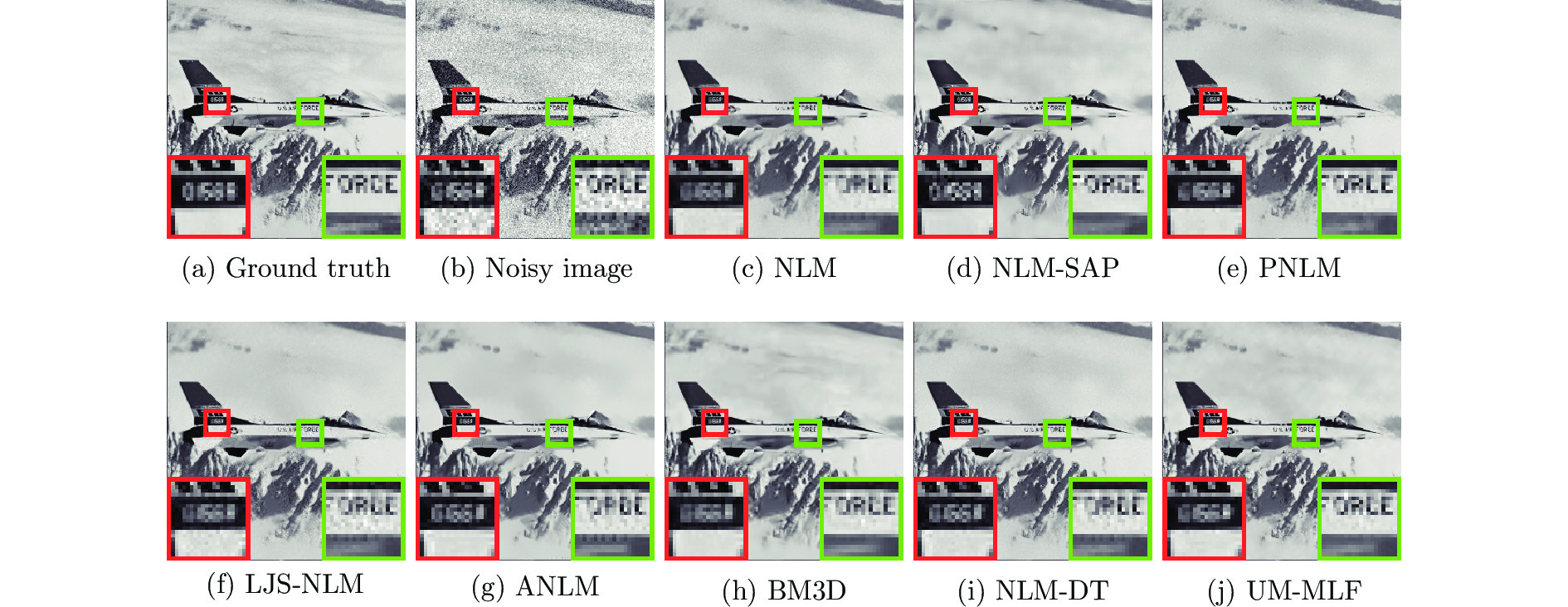
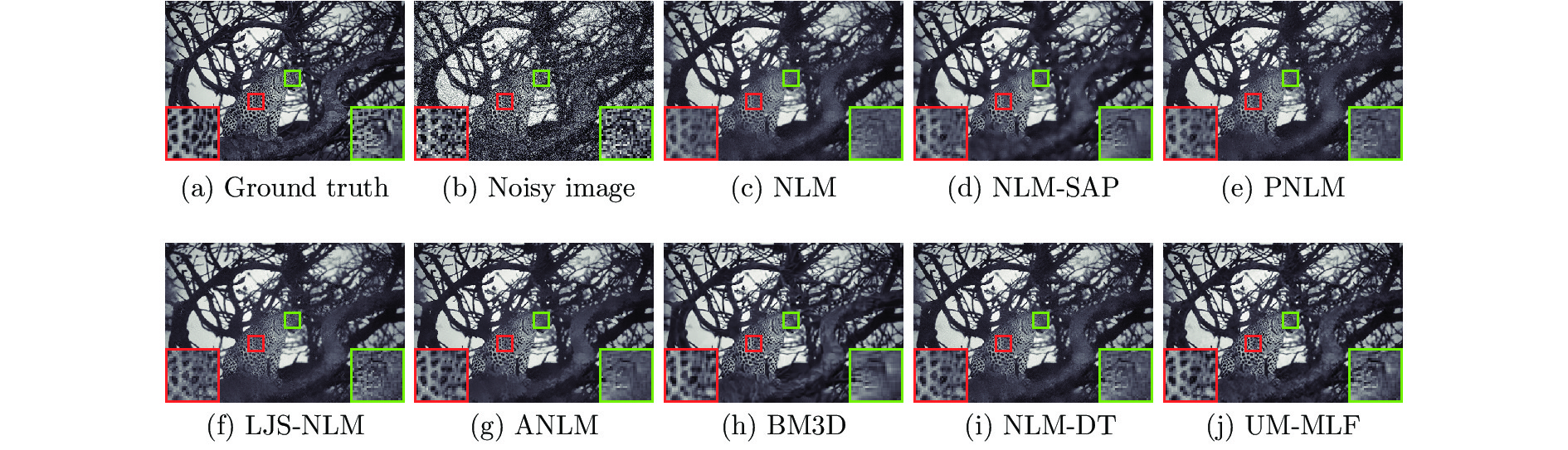
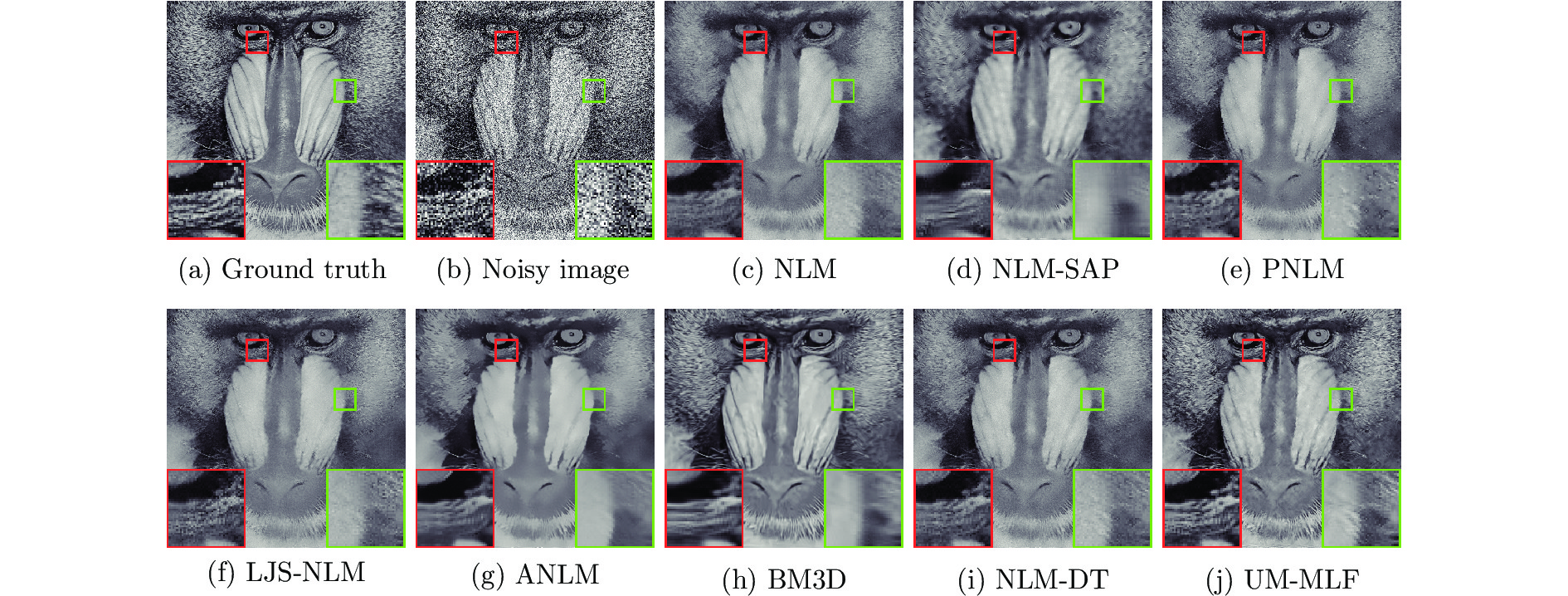
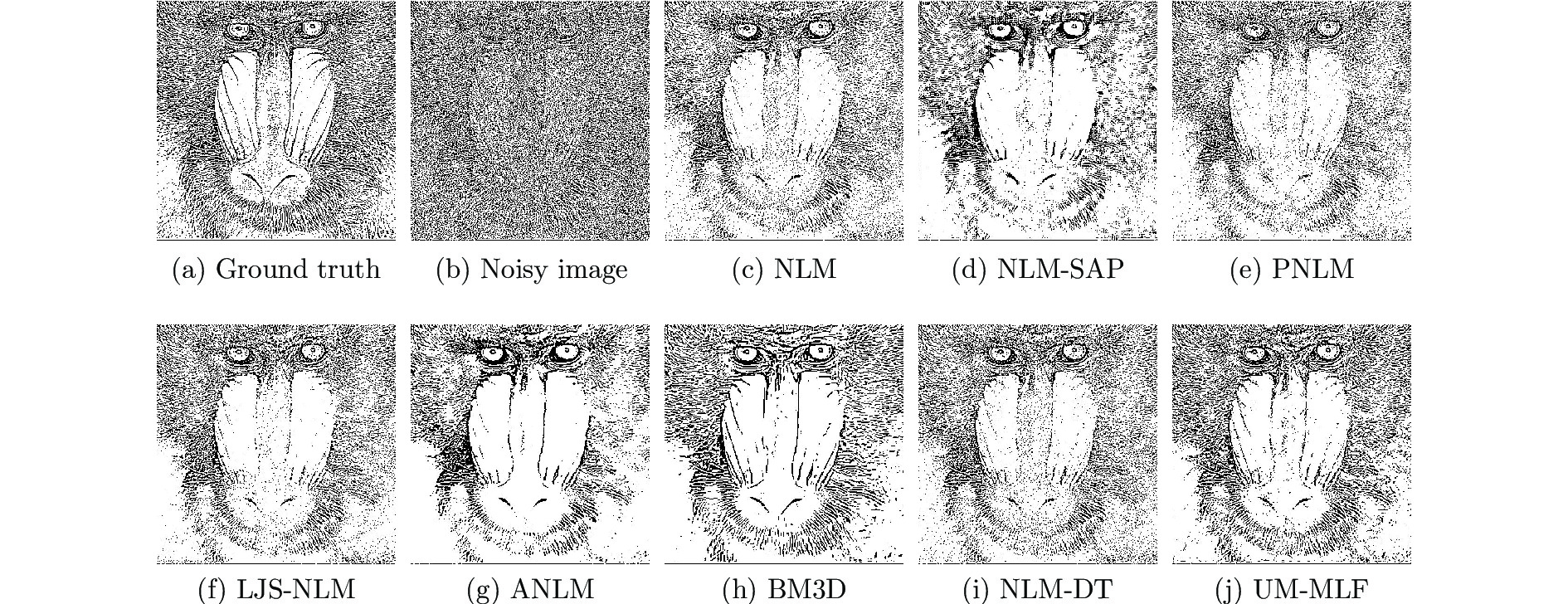
非局部均值去噪 (Non-local means, NLM) 算法利用图像的自相似性, 取得了很好的去噪效果. 然而, NLM 算法对图像中不相似的邻域块分配了过大的权重, 此外算法的搜索窗大小和滤波参数等通常是固定的且无法根据图像内容的变化做出自适应的调整. 针对上述问题, 本文提出一种无监督多重非局部融合 (Unsupervised multi-non-local fusion, UM-NLF) 的图像去噪方法, 即变换搜索窗等组合参数得到多个去噪结果, 并利用 SURE (Stein's unbiased risk estimator) 对这些结果进行无监督的随机线性组合以获得最终结果. 首先, 为了滤除不相似或者相似度较低的邻域块, 本文引入一种基于可微分硬阈值函数的非局部均值 (Non-local means with a differential hard threshold function, NLM-DT) 算法, 并结合快速傅里叶变换 (Fast Fourier transformation, FFT), 初步提升算法的去噪效果和速度; 其次, 针对不同的组合参数, 利用快速 NLM-DT 算法串联生成多个去噪结果; 然后, 采用蒙特卡洛随机采样的思想对上述多个去噪结果进行随机的线性组合, 并利用基于 SURE 特征加权的移动平均滤波算法来抑制多个去噪结果组合引起的抖动噪声; 最后, 利用噪声图像和移动平均滤波后图像的 SURE 进行梯度的反向传递来优化随机线性组合的系数. 在公开数据集上的实验结果表明: UM-NLF 算法去噪结果的峰值信噪比 (Peak signal to noise ratio, PSNR) 超过了 NLM 及其大部分改进算法, 以及在部分图像上超过了 BM3D 算法. 同时, UM-NLF 相比于 BM3D 算法在视觉上产生更少的振铃伪影, 改善了图像的视觉质量.
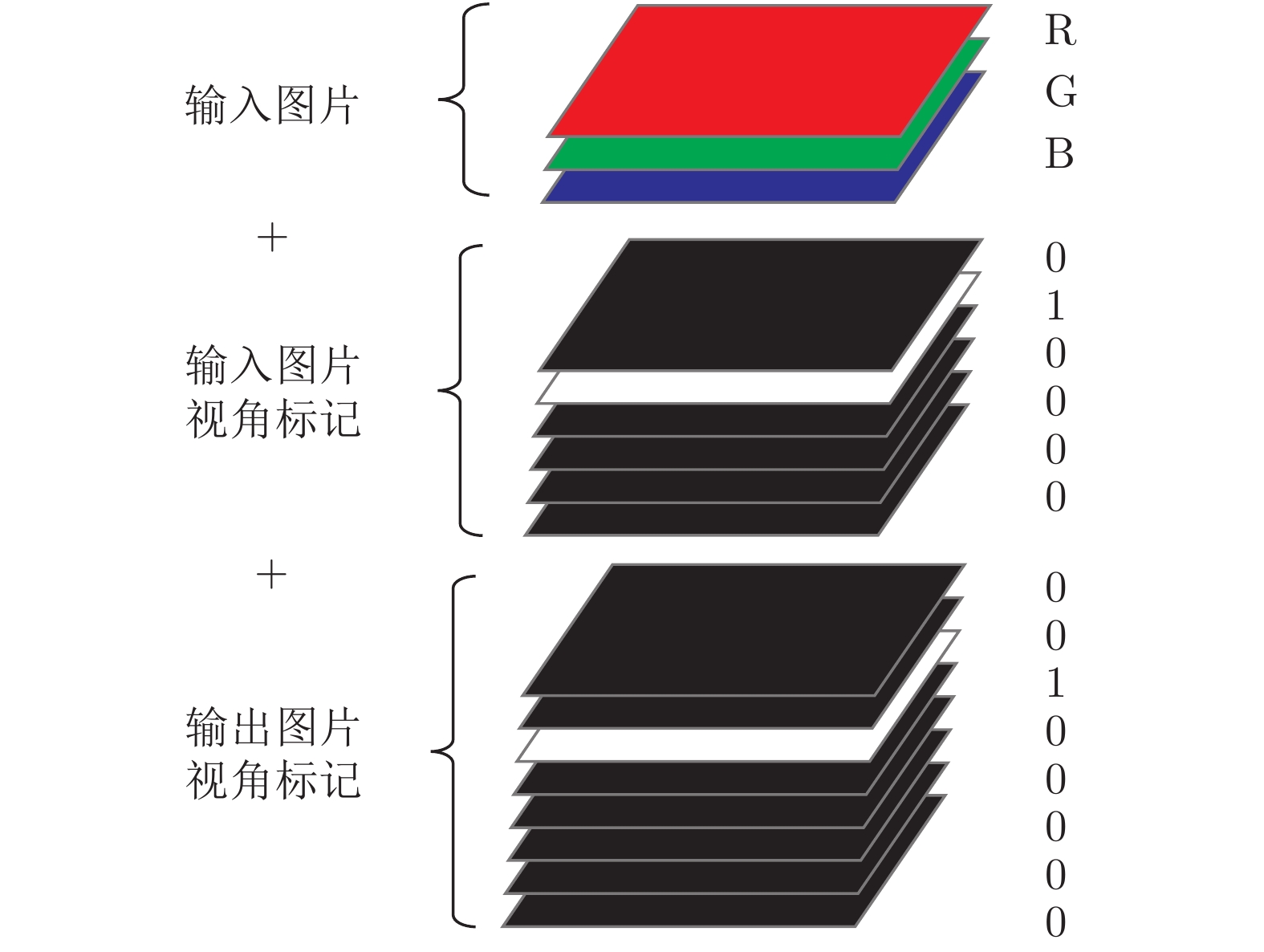
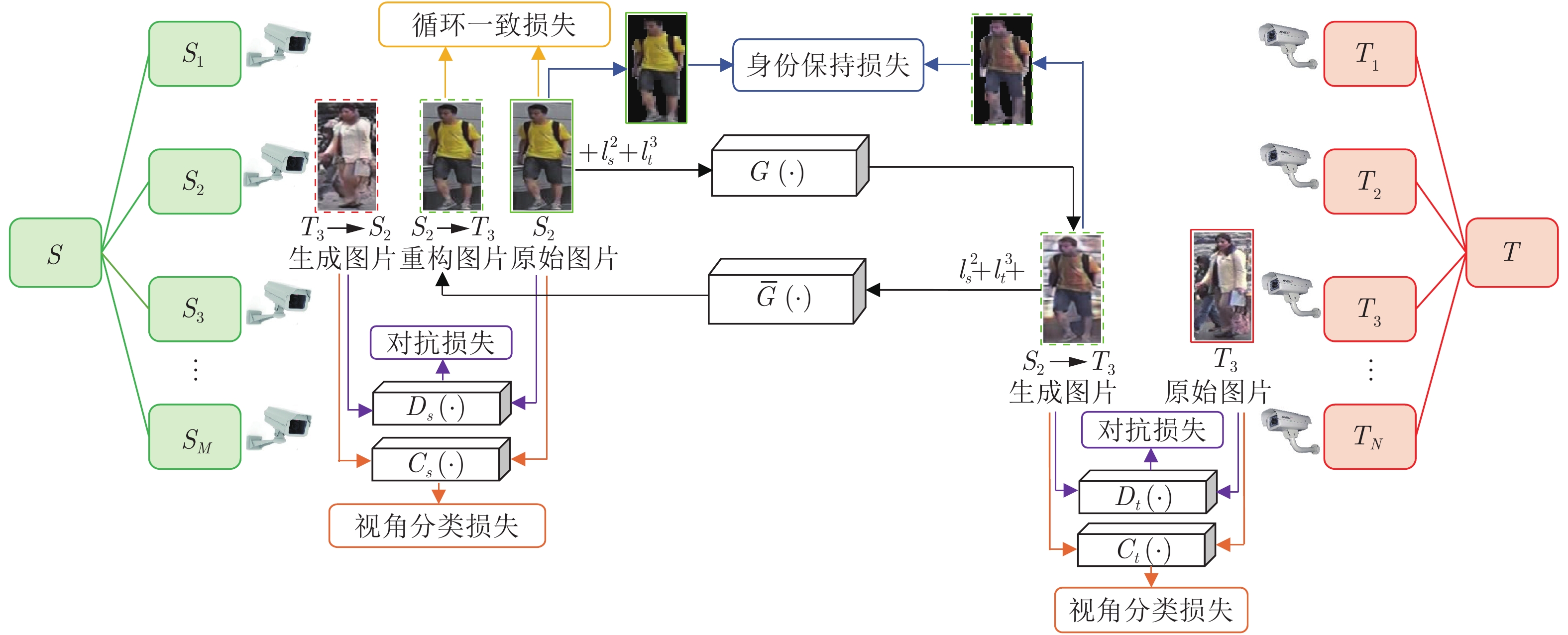
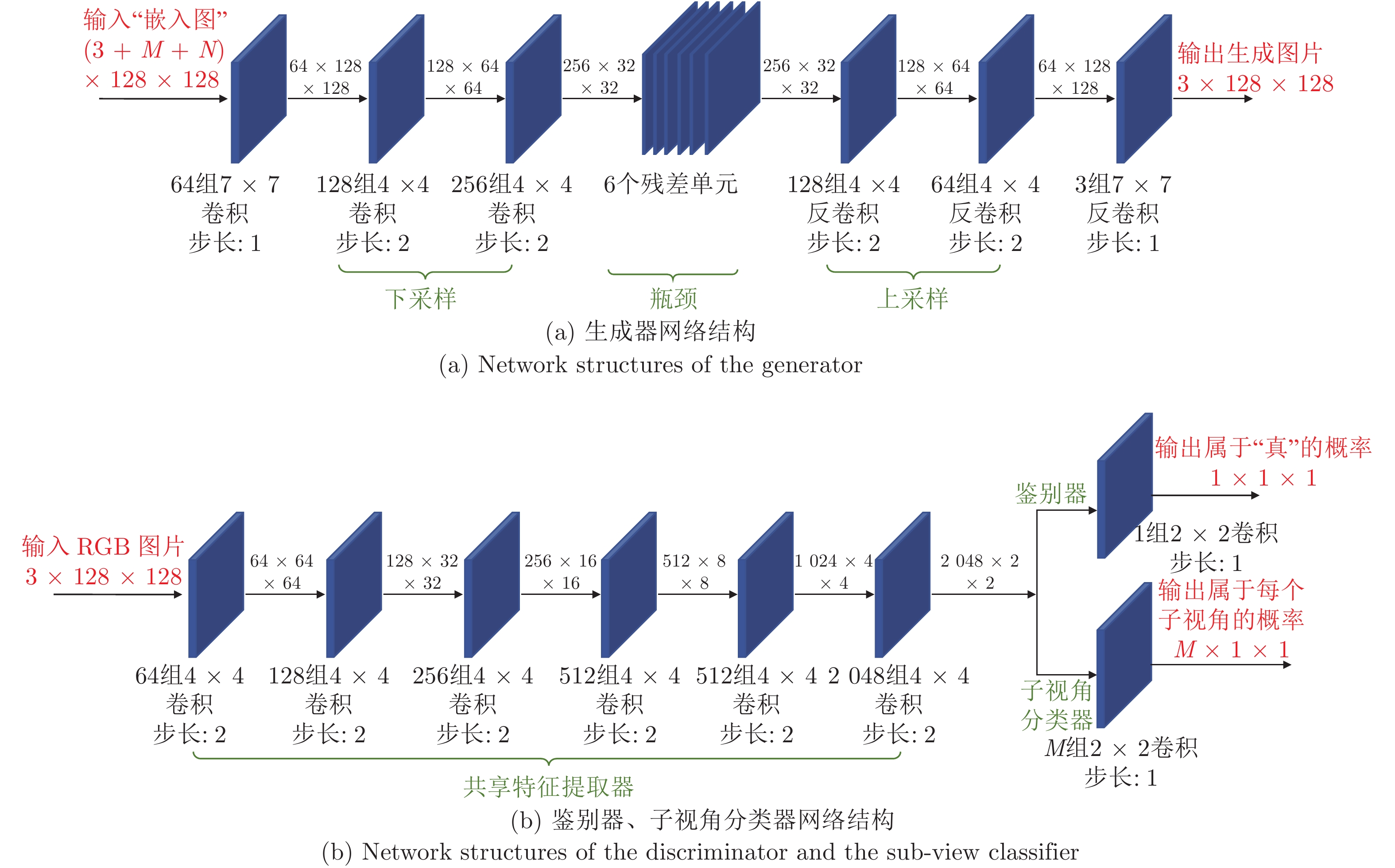
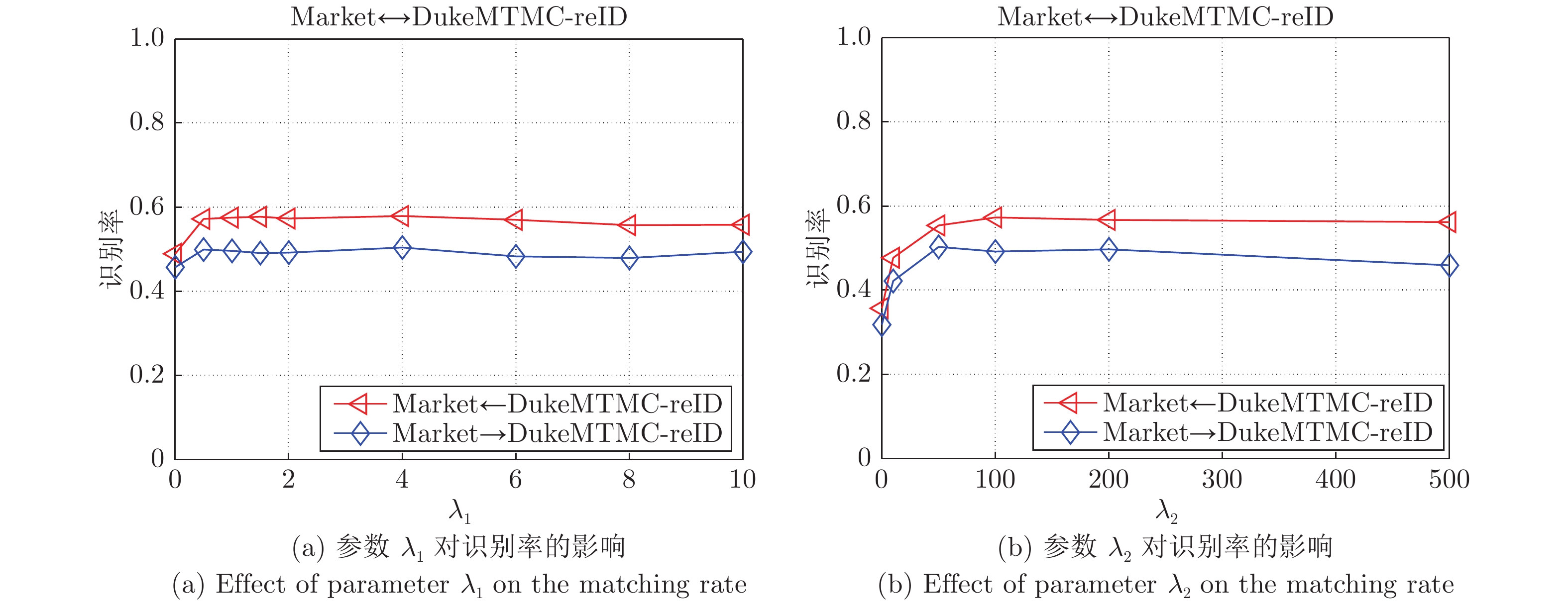
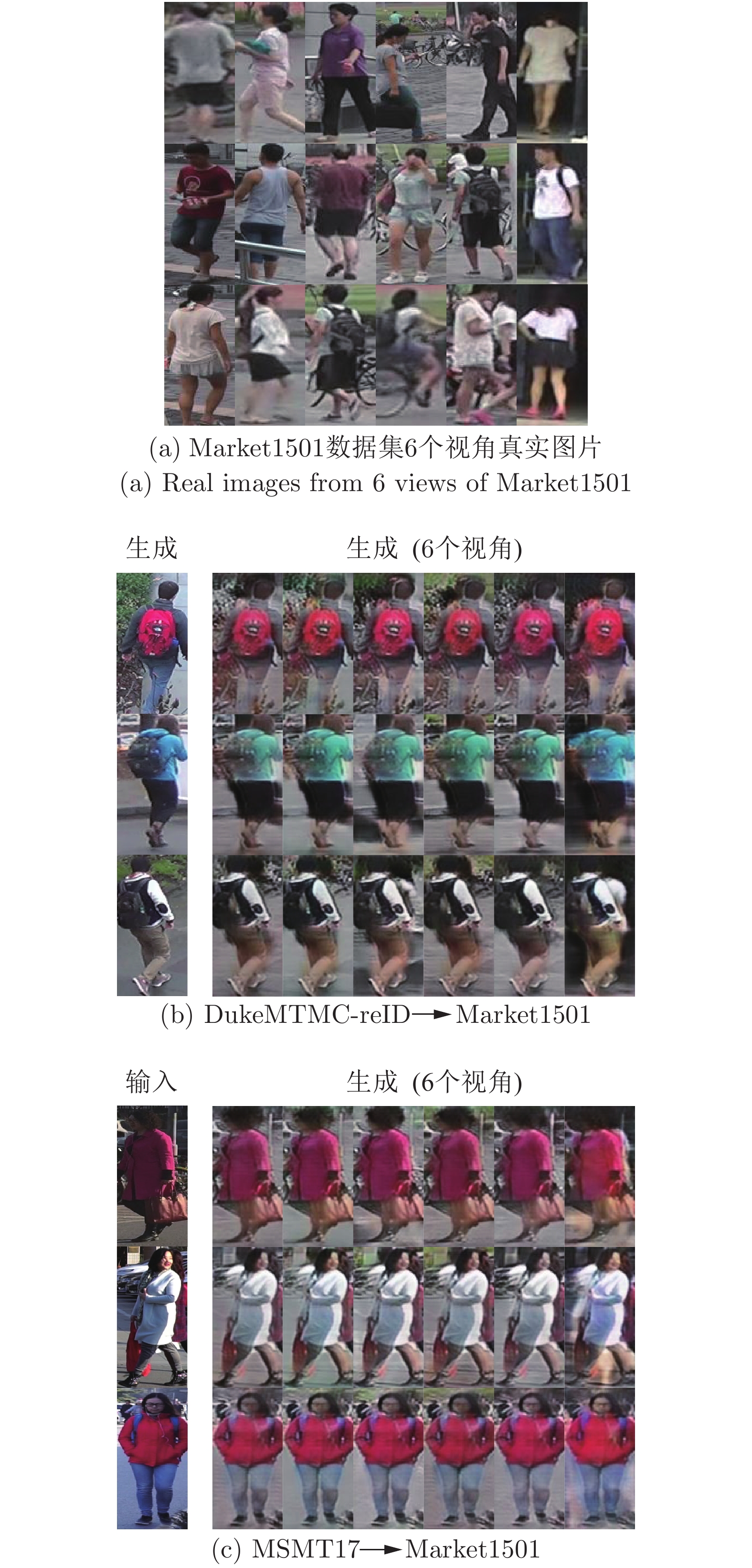
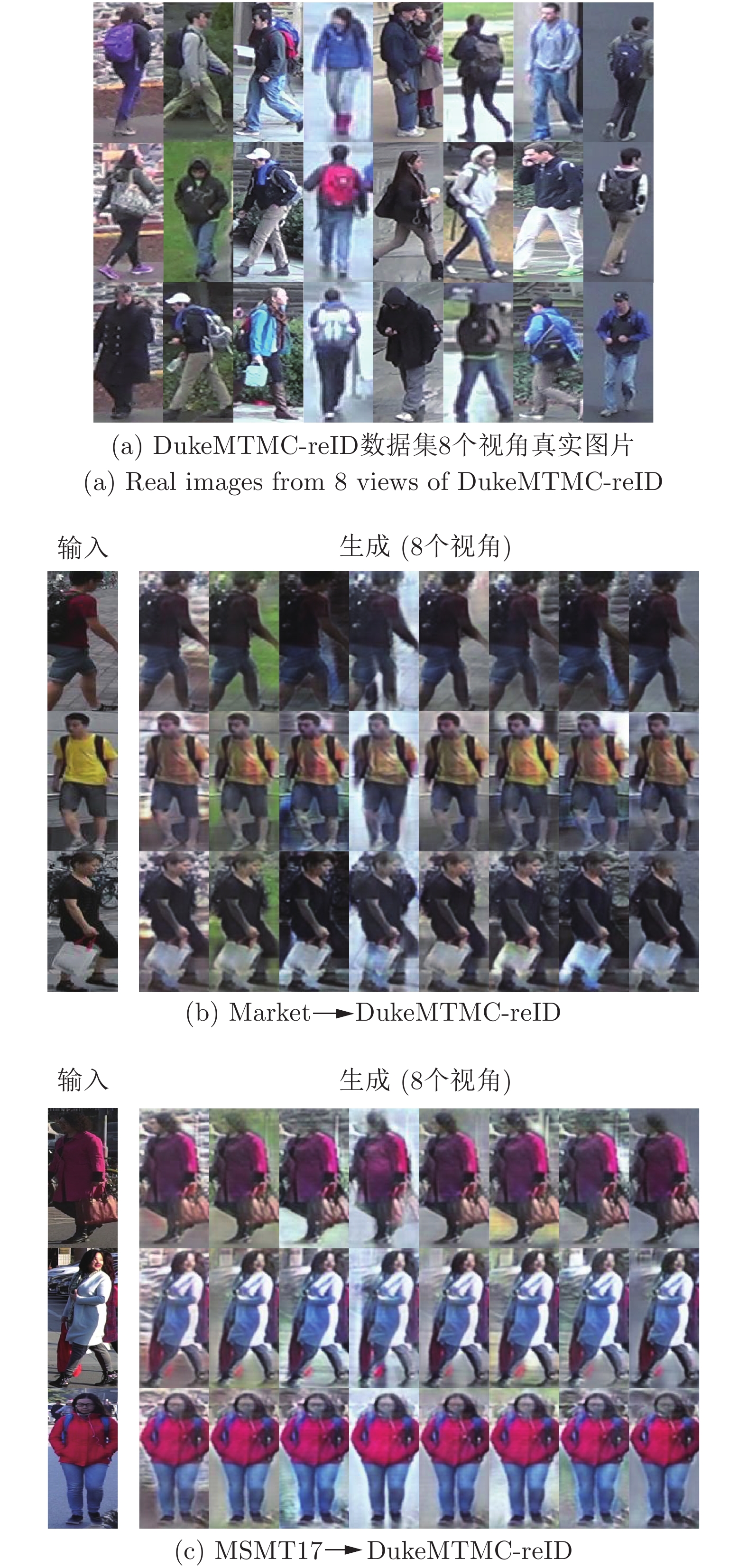
无监督跨域迁移学习是行人再识别中一个非常重要的任务. 给定一个有标注的源域和一个没有标注的目标域, 无监督跨域迁移的关键点在于尽可能地把源域的知识迁移到目标域. 然而, 目前的跨域迁移方法忽略了域内各视角分布的差异性, 导致迁移效果不好. 针对这个缺陷, 本文提出了一个基于多视角的非对称跨域迁移学习的新问题. 为了实现这种非对称跨域迁移, 提出了一种基于多对多生成对抗网络(Many-to-many generative adversarial network, M2M-GAN)的迁移方法. 该方法嵌入了指定的源域视角标记和目标域视角标记作为引导信息, 并增加了视角分类器用于鉴别不同的视角分布, 从而使模型能自动针对不同的源域视角和目标域视角组合采取不同的迁移方式. 在行人再识别基准数据集Market1501、DukeMTMC-reID和MSMT17上, 实验验证了本文的方法能有效提升迁移效果, 达到更高的无监督跨域行人再识别准确率.



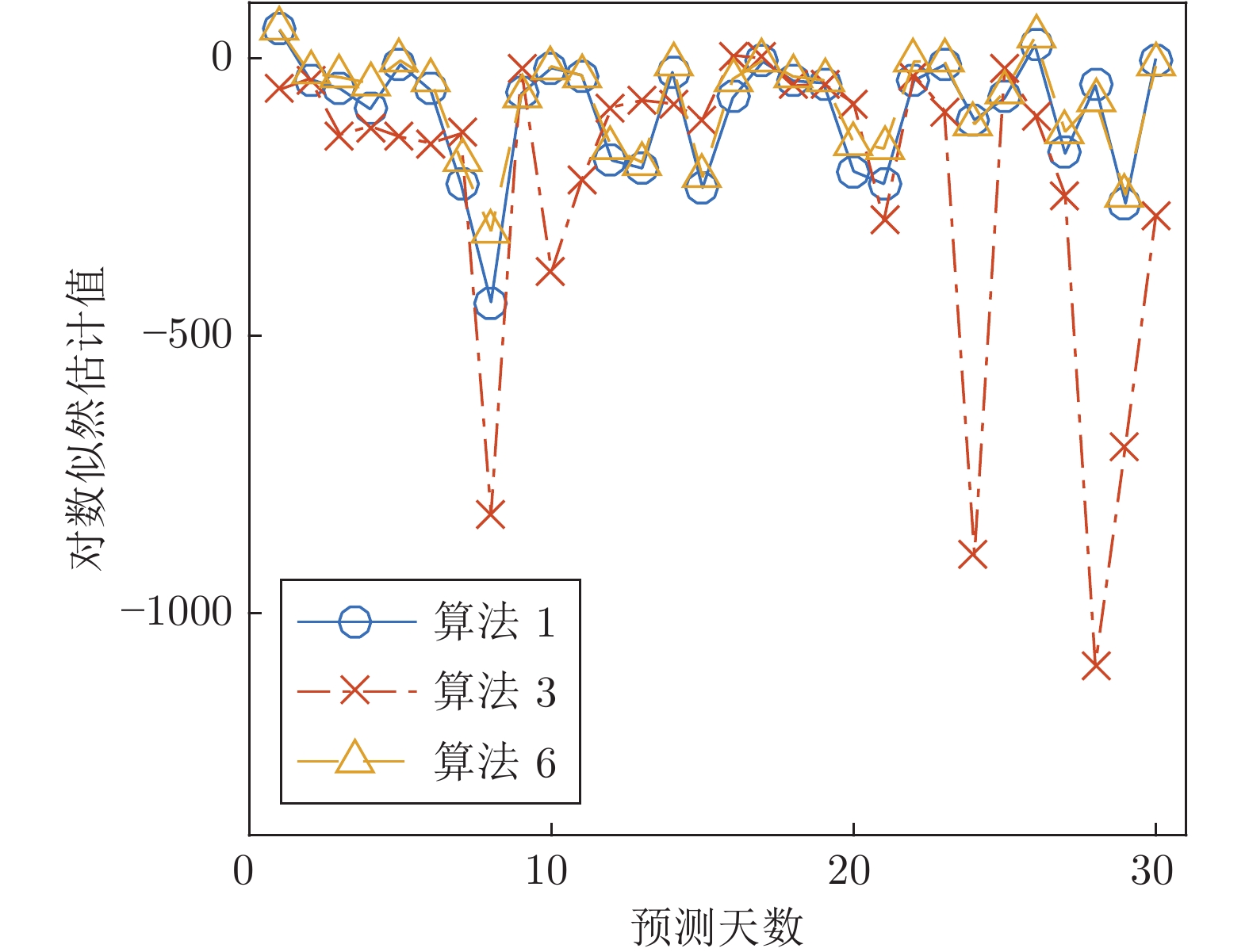
因子分析是一种在工业领域广泛使用的统计学方法. 在金融资产管理中, 因子分析通过对历史价格波动的极大似然估计推导自适应的统计学因子来生成风险模型. 与通过使用预先设定具有经济学含义的因子来生成风险模型的基本面因子模型相比, 通过因子分析生成的模型不仅更灵活, 还能发现在基本面模型中缺失的因子. 然而, 由于因子分析所生成模型中的统计学因子缺少可解释性, 因此当金融数据中存在显著噪音时容易过拟合. 针对中国股市数据的风险模型生成问题, 本文提出快速因子分析算法以及将基本面因子结合到因子分析中的挑选基本面因子的混合因子分析方法, 使风险模型同时在因子探索及模型可解释性上达到最优. 实验结果显示快速因子分析方法能够达到31倍以上的加速比, 且新混合因子分析方法能够增大人造数据集以及真实数据集上预测的对数似然估计值. 在真实数据集上, 新方法能最好够达到平均对数似然估计值12.00, 比因子分析构建模型的7.56大4.44, 并且两个算法均值差值的标准差为1.58, 表现出新方法能构建更准确的风险模型.
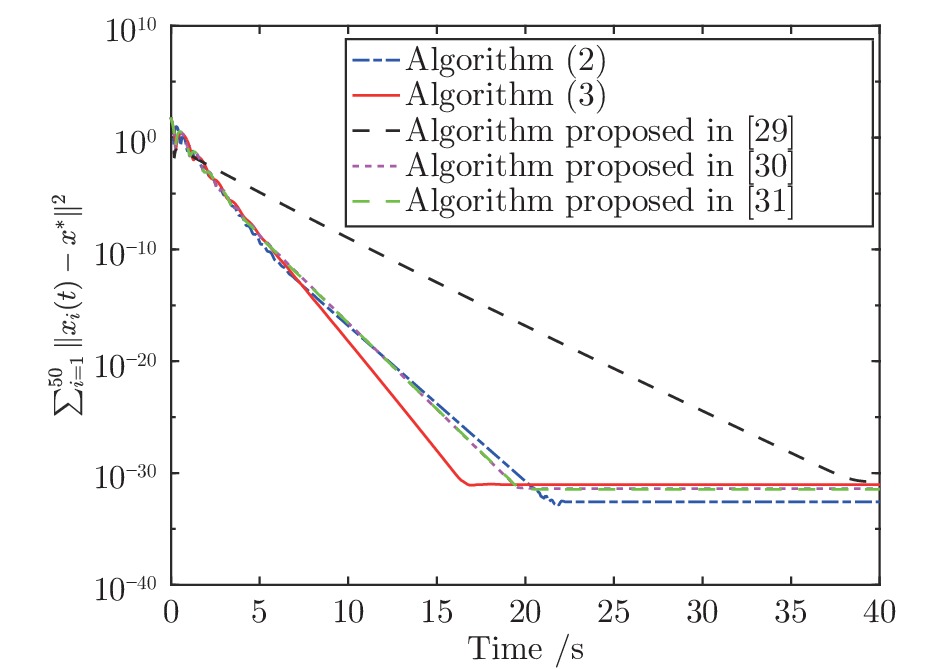
本文研究了一类分布式优化问题, 其目标是通过局部信息交换使由局部成本函数之和构成的全局成本函数最小. 针对无向连通图, 我们提出了两种基于比例积分策略的分布式优化算法. 在局部成本函数可微且凸的条件下, 证明了所提算法渐近收敛到全局最小值点. 更进一步, 在局部成本函数具有局部Lipschitz梯度和全局成本函数关于全局最小值点是有限强凸的条件下, 证明了所提算法的指数收敛性. 此外, 为了避免智能体之间的连续通信和减少通信负担, 将所提的两种分布式优化算法与事件触发通信相结合, 提出了两种基于事件触发的分布式优化算法. 证明了提出的事件触发优化算法不存在Zeno行为, 并且在相应条件下保持了与连续通信下分布式优化算法一样的收敛性. 最后, 通过数值仿真验证了上述理论结果.

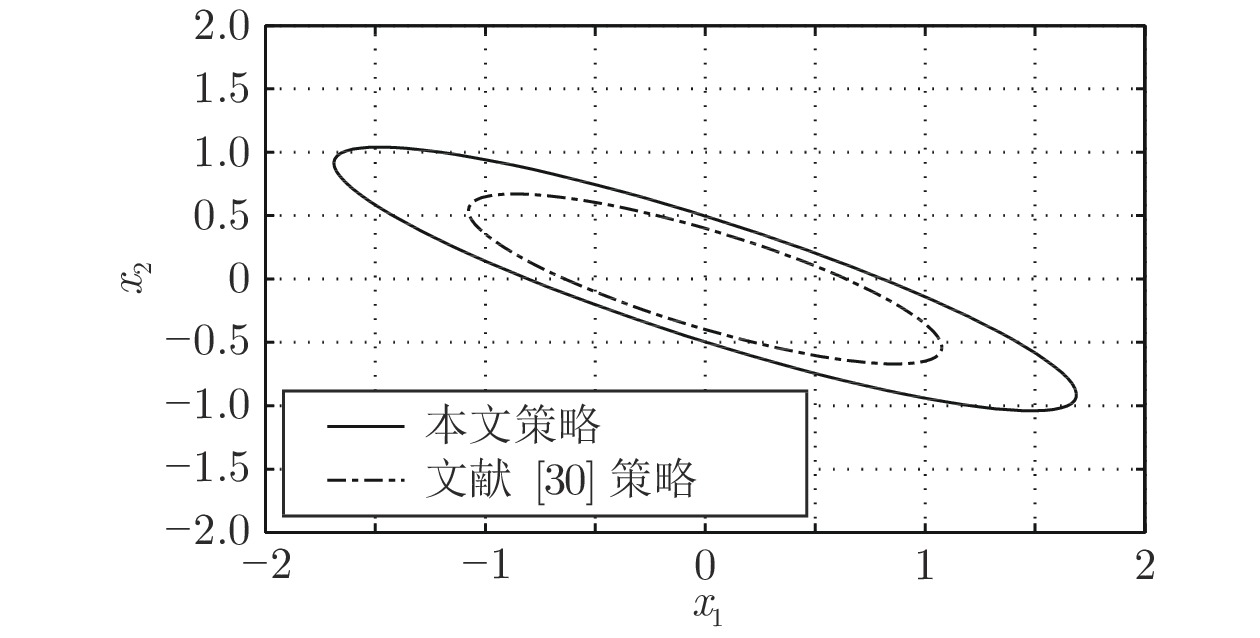
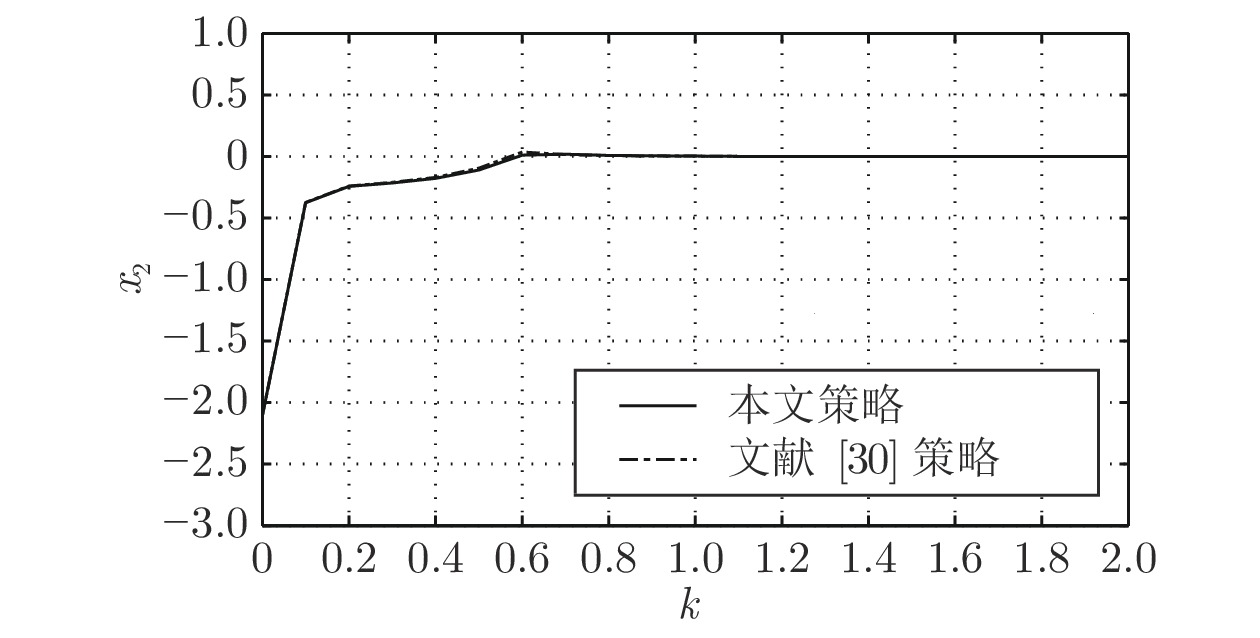
为保证预测控制的稳定性, 经典的策略是在预测控制的优化问题中加入终端约束集和终端惩罚函数, 并保证终端约束集是一个在终端控制律作用下的正不变集, 终端惩罚函数是受控系统的局部控制Lyapunov函数. 本文提供了一种求解非线性系统终端约束集、终端控制律和终端惩罚函数的新策略. 通过在优化问题中引入新的变量来降低求解终端约束条件的保守性, 并且可以从理论上保证求解得到的终端约束集更大. 通常情况下, 较大的终端约束集将允许选取的预测时域较小, 因而可以降低预测控制的在线计算负担. 从形式上看, 新的变量的引入使得终端约束集和终端惩罚项实现了某种程度的解耦, 即终端约束集不再是终端惩罚函数的水平截集. 最后通过仿真算例验证了所提策略的有效性.


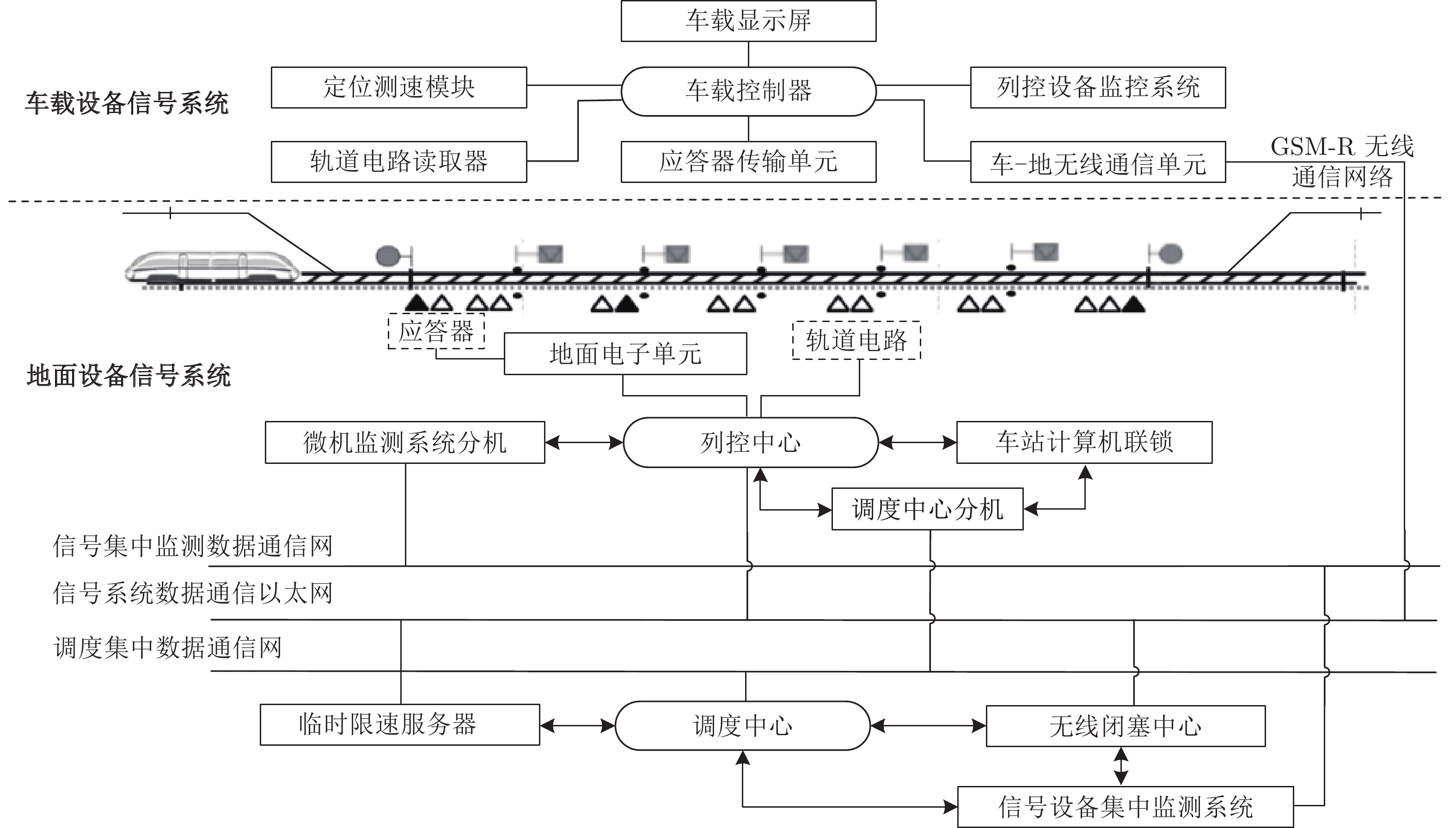
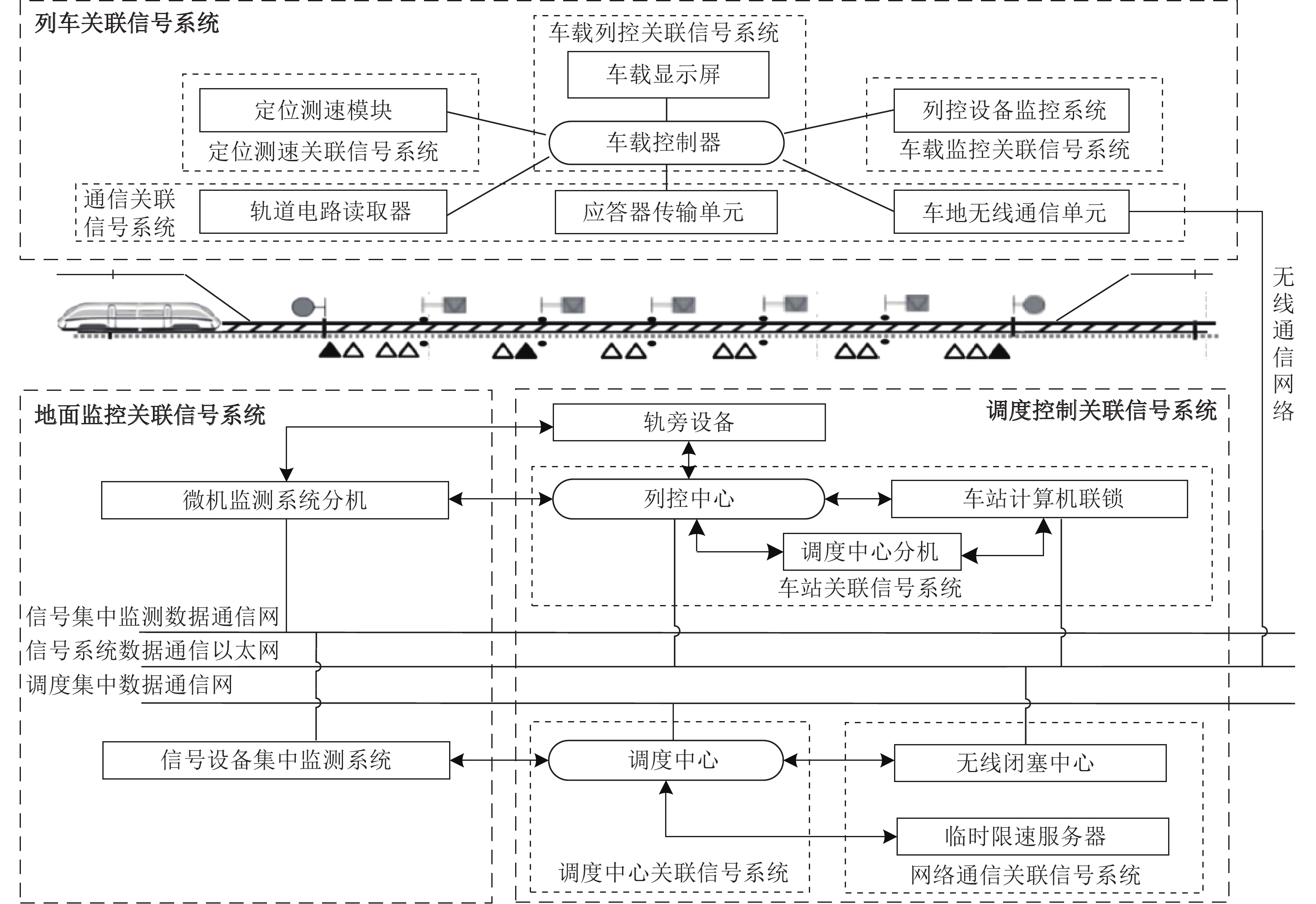
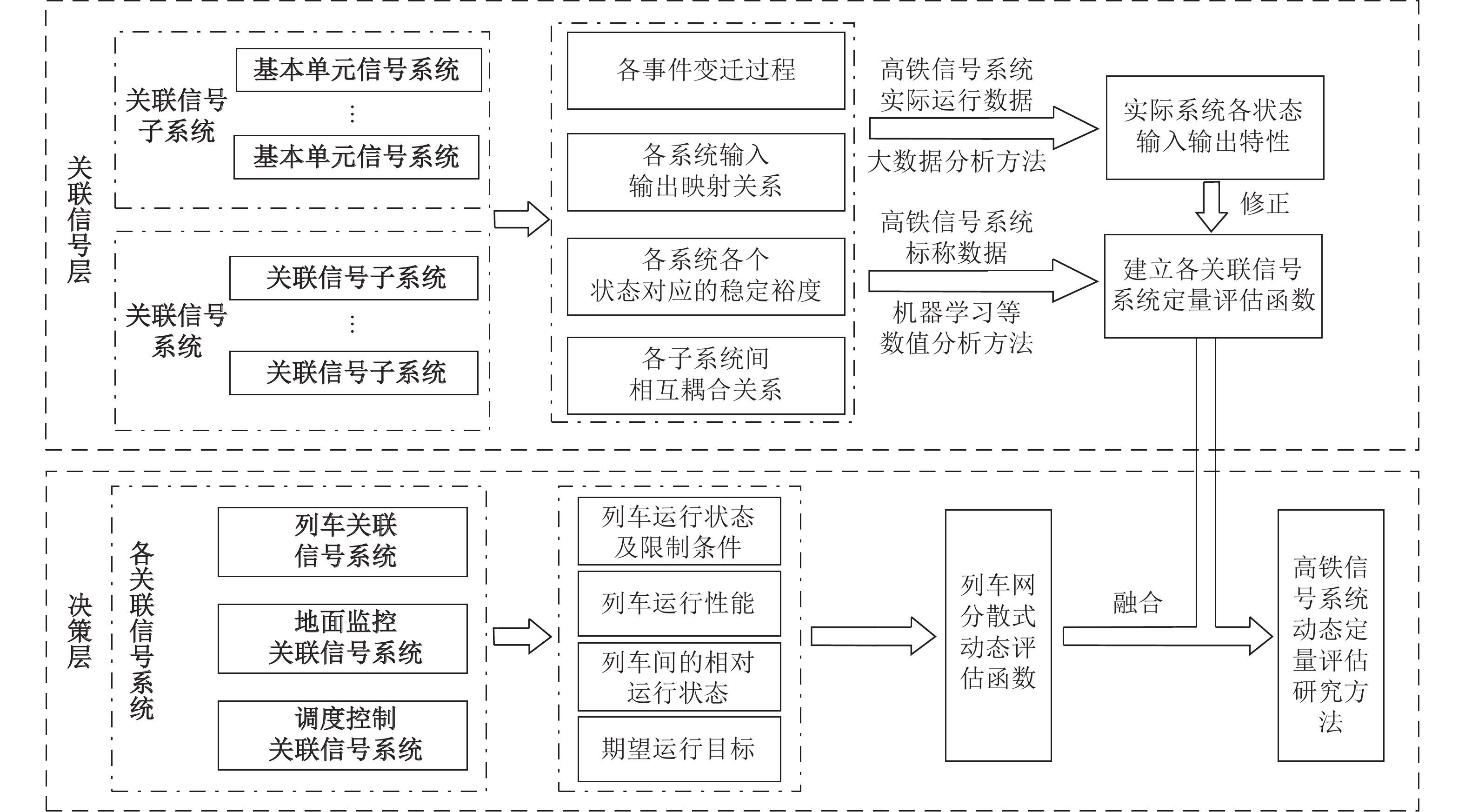
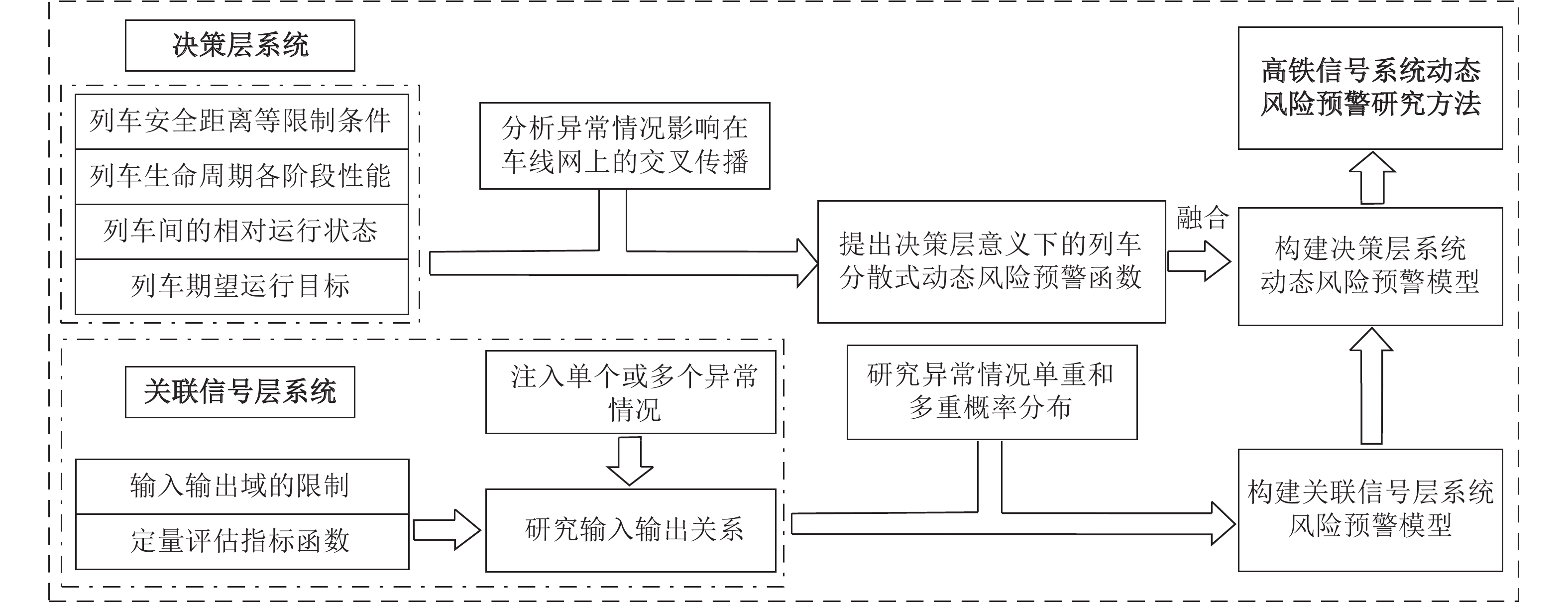
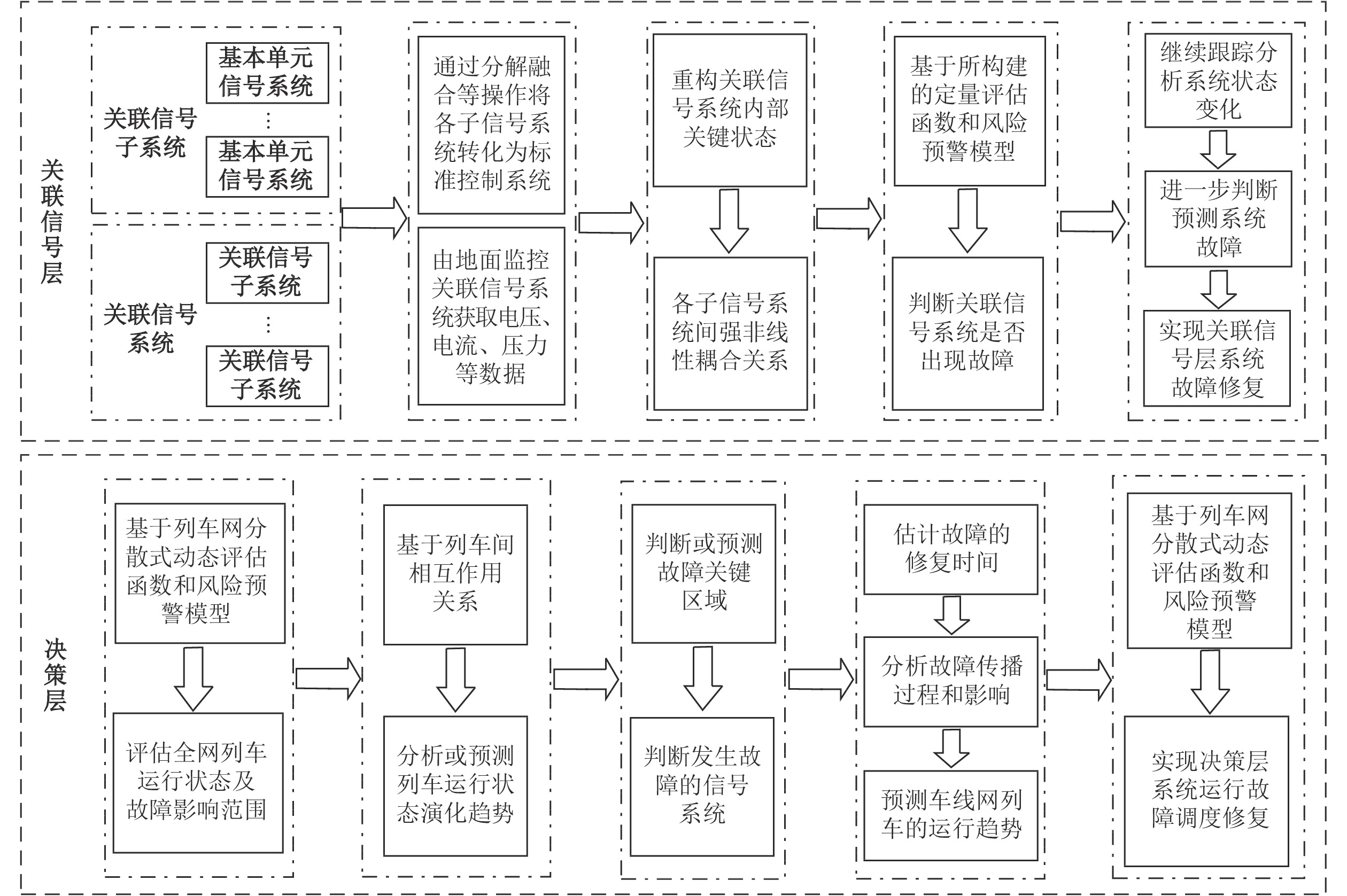
高速铁路信号系统是高速铁路安全可靠运营的核心装备, 实现高速铁路信号系统智能运维是降低高速铁路运行风险的必要基础保障. 目前, 我国高速铁路信号系统运维研究工作主要集中于器件级系统或基本单元系统, 系统层面的相关研究几乎为空白, 亟需从整体上建立全局架构理论模型. 为此, 定义了关联信号系统, 提出了分散式动态评估函数, 将动态调度纳入运维体系, 构建了分层架构模型. 在此基础上, 针对分层架构模型的决策层和关联信号层, 提出了动态定量评估、动态风险预警和故障诊断的研究方法, 并展望了所面临的挑战.
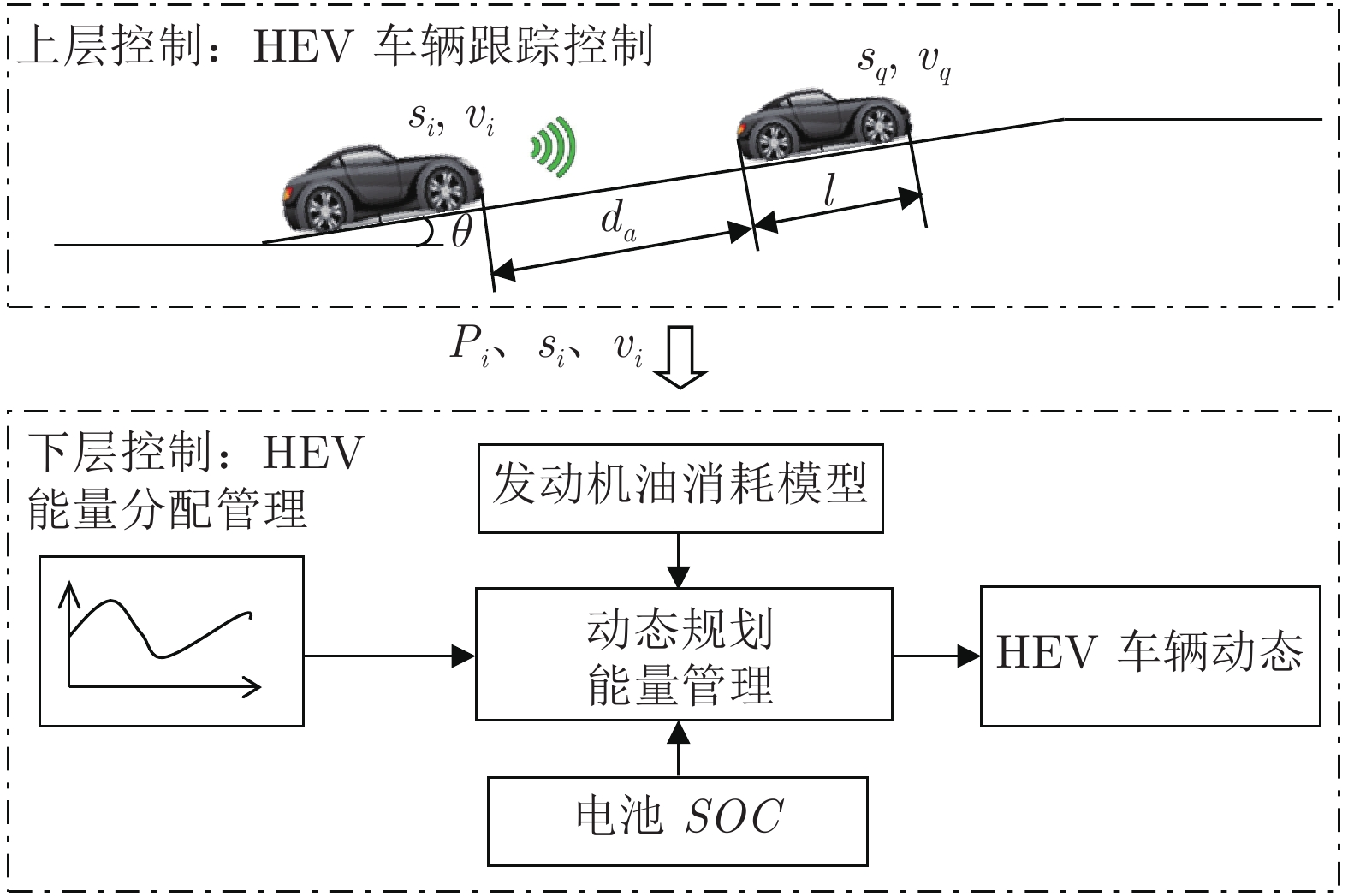
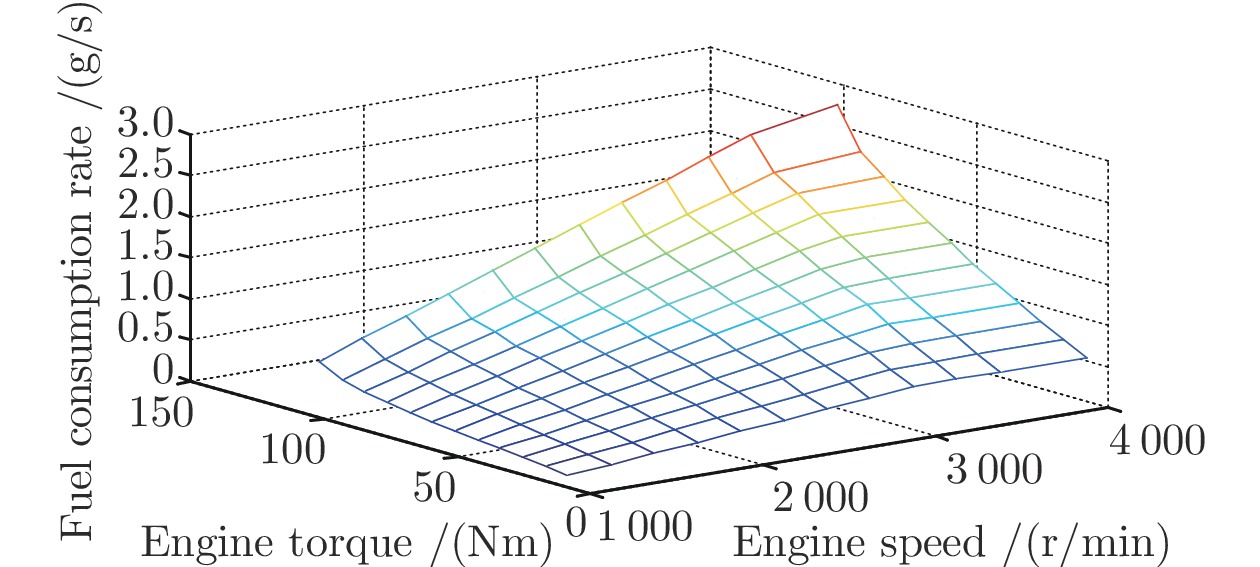
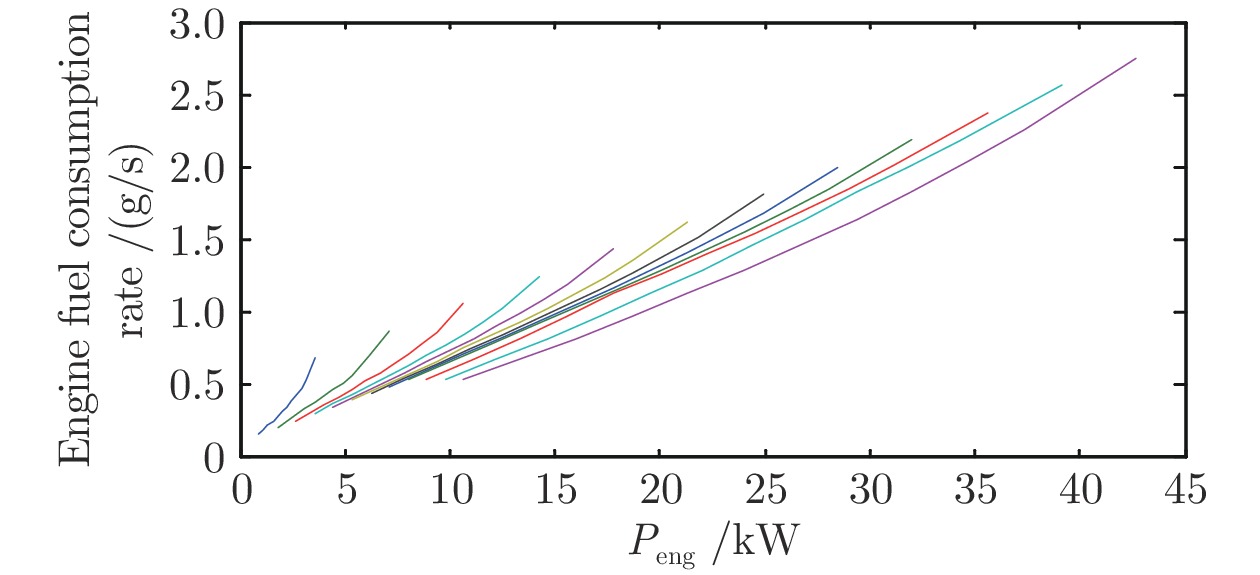
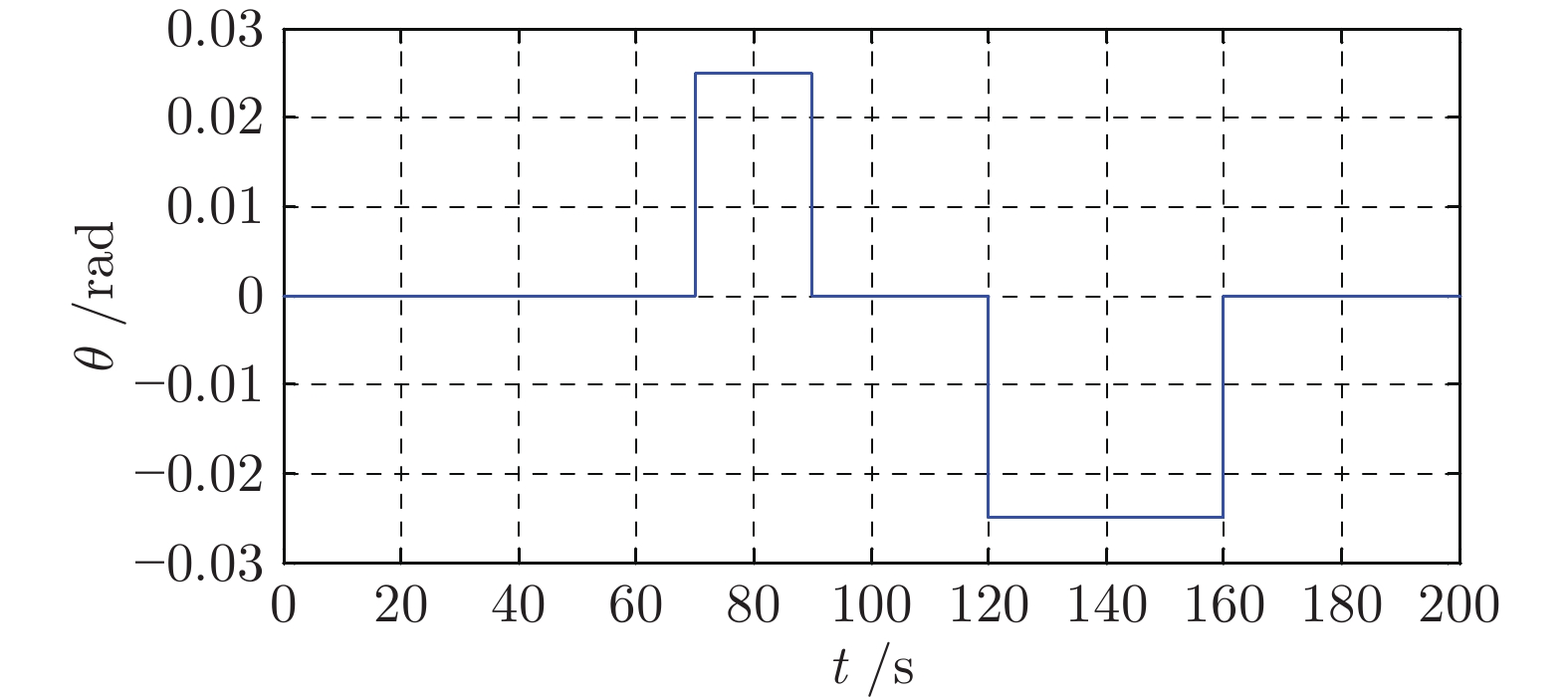
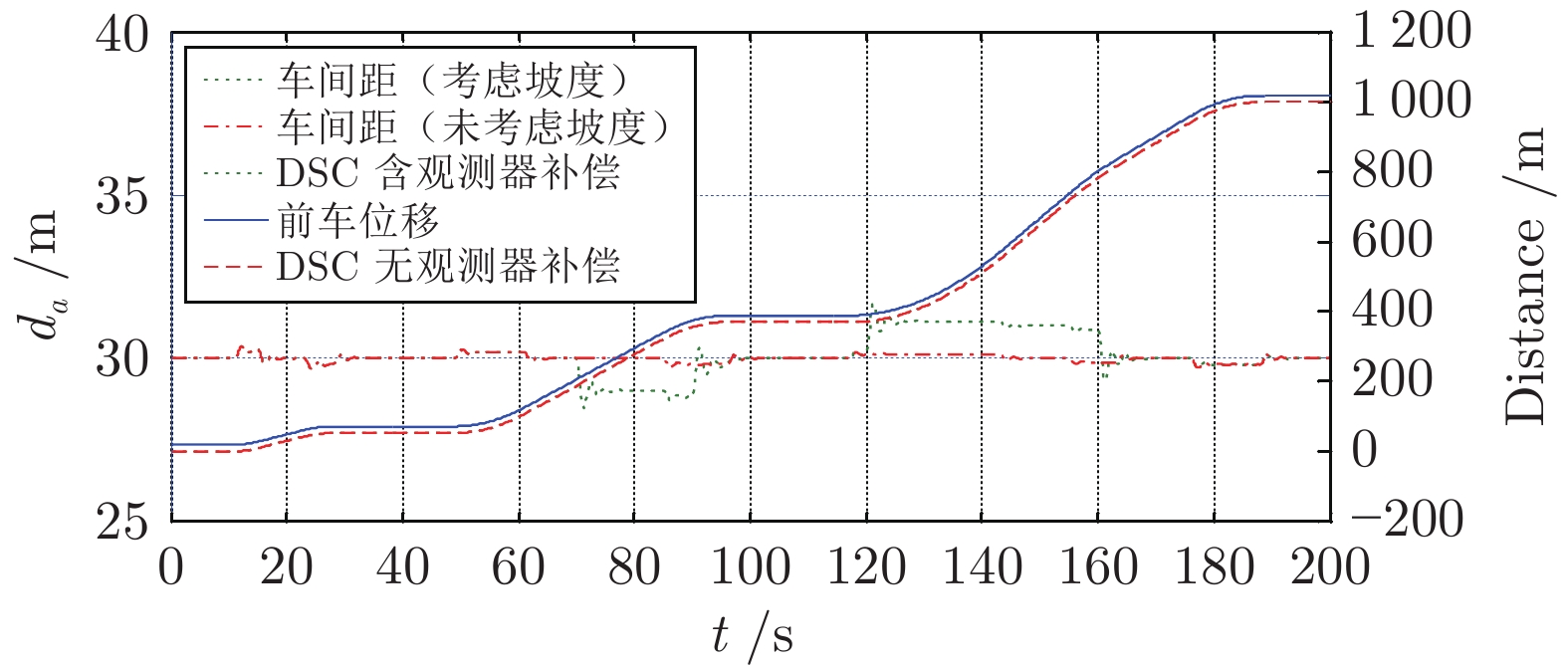
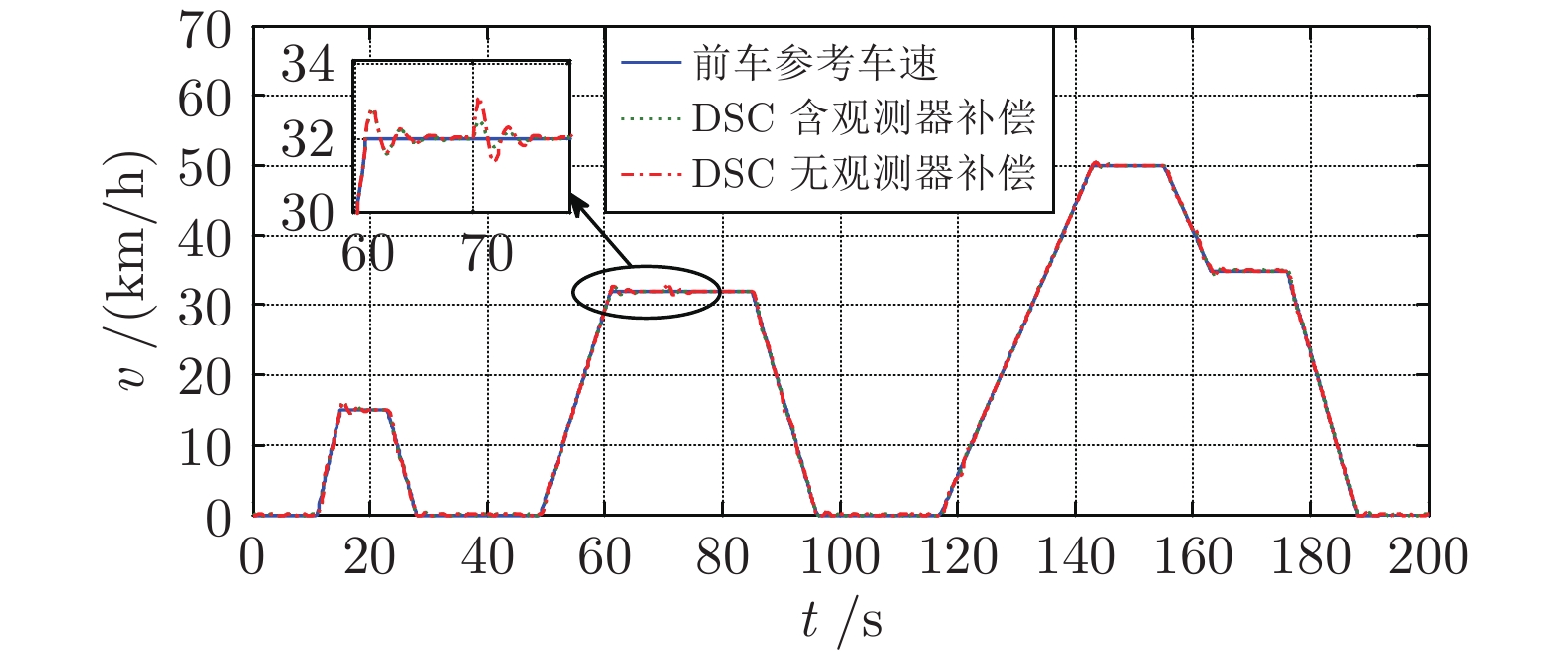
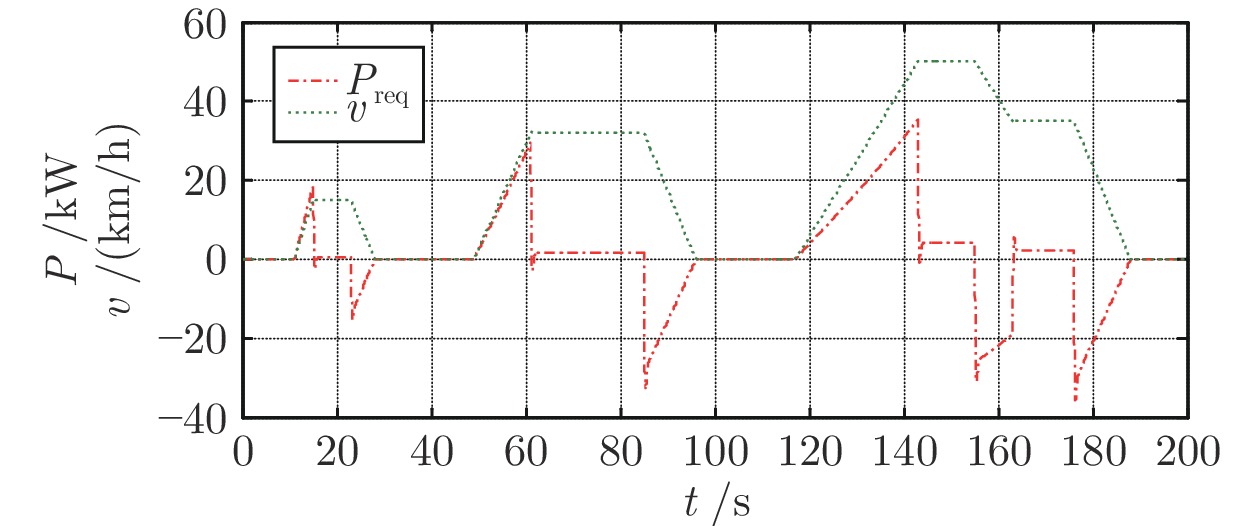
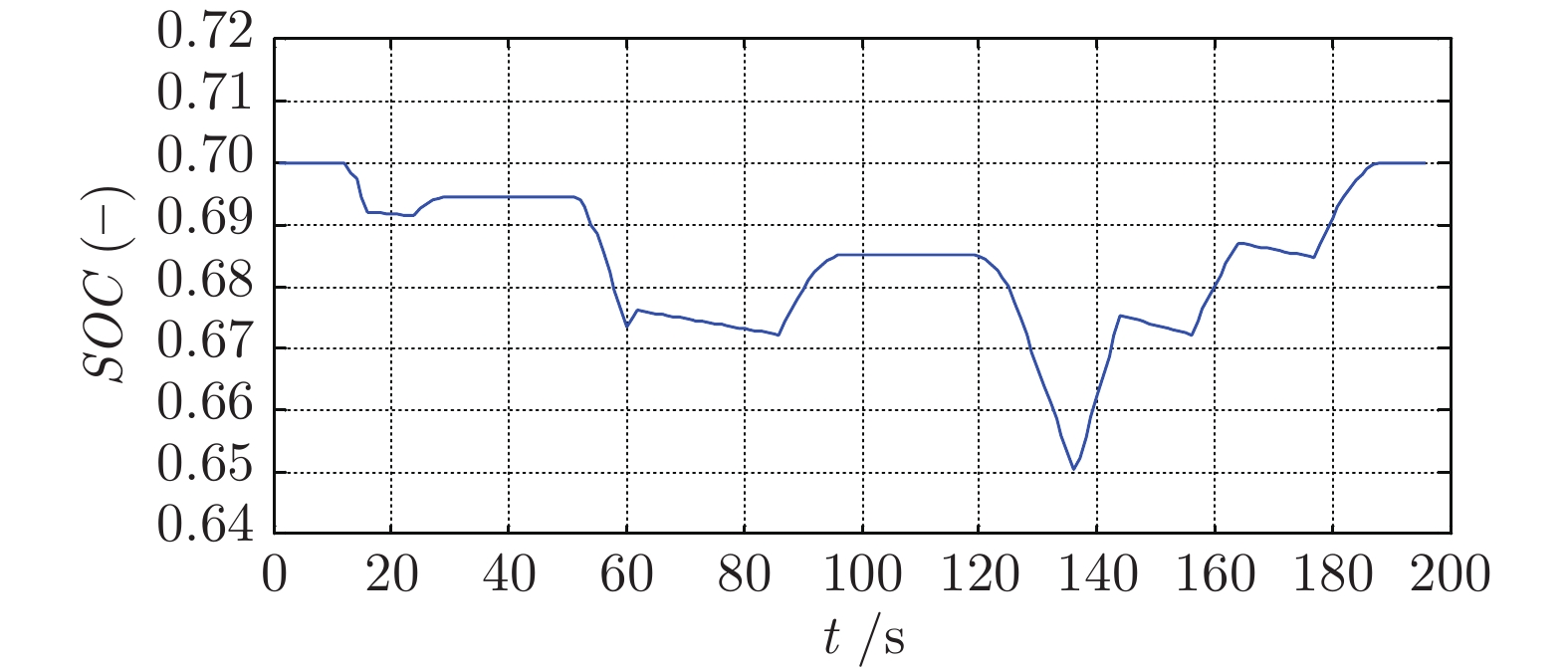
混合动力电动汽车(Hybrid electric vehicles, HEVs)的能量管理问题至关重要, 而混合动力电动汽车的跟车控制不仅涉及跟车效果与安全性, 也影响着能量的高效利用. 将HEVs的跟车控制与能量管理相结合, 提出一种基于安全距离的HEVs车辆跟踪与能量管理控制方法. 首先, 考虑坡度、载荷变动建立了HEVs车辆跟车系统的非线性模型, 并基于安全距离, 提出一种基于道路观测器的动态面控制(Dynamic surface control, DSC)进行车辆跟踪控制. 然后, 结合跟踪控制下工况循环, 采用滚动动态规划(Dynamic programming, DP)算法进行混合动力电动汽车能量实时优化控制. 最后, 通过仿真研究进行验证.


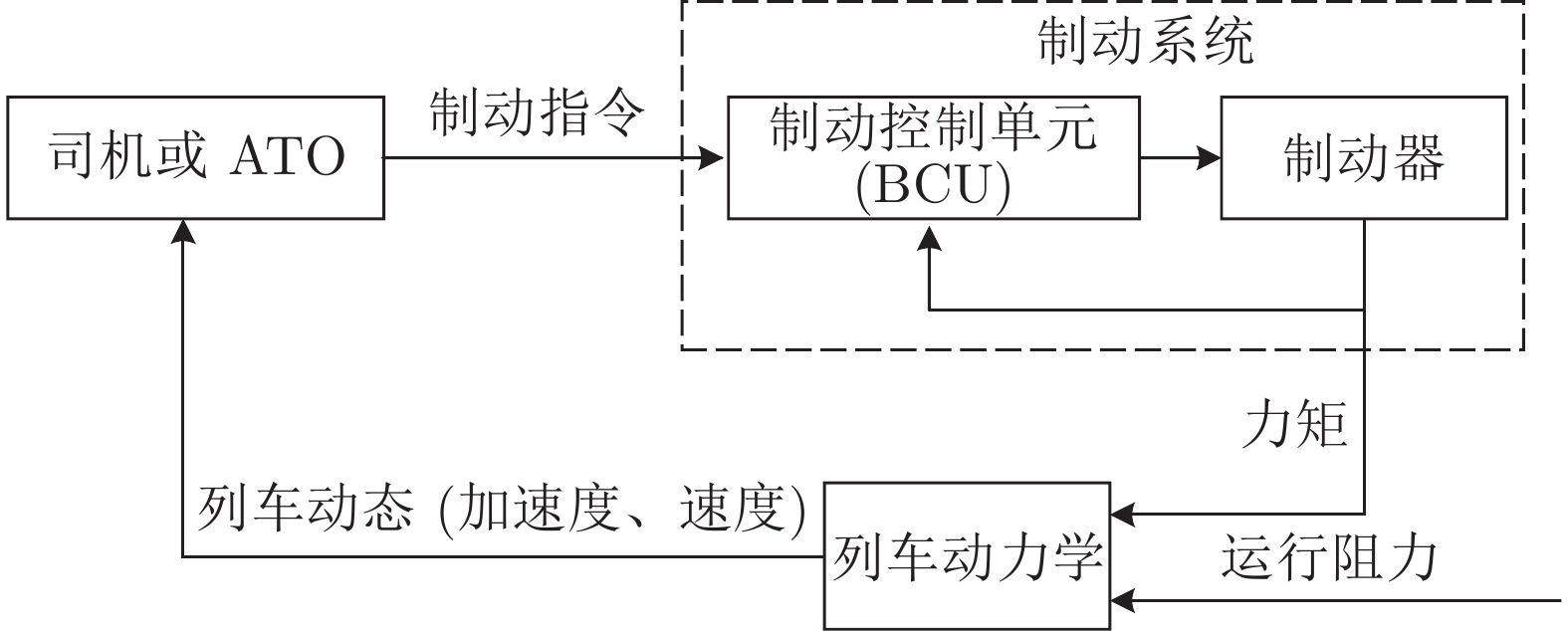
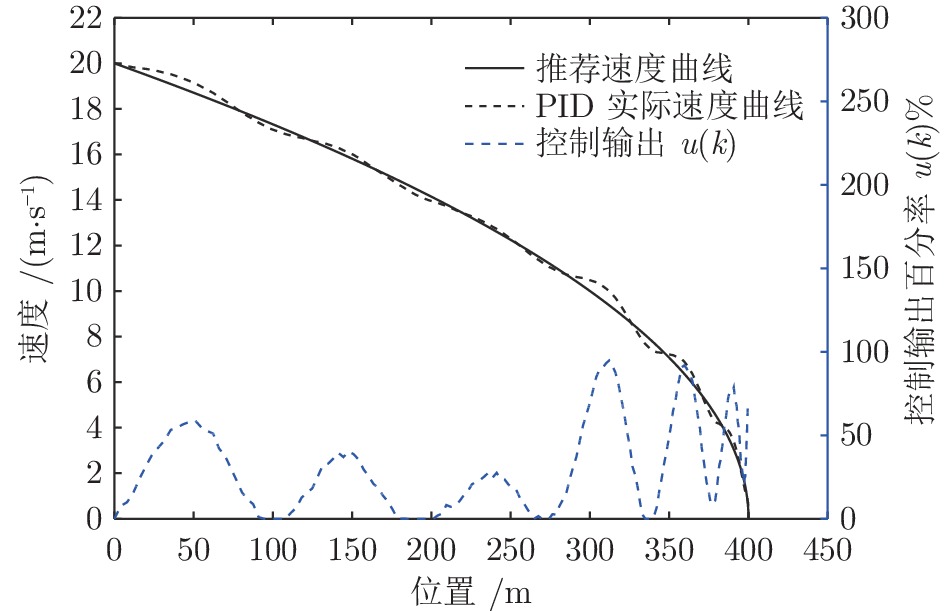
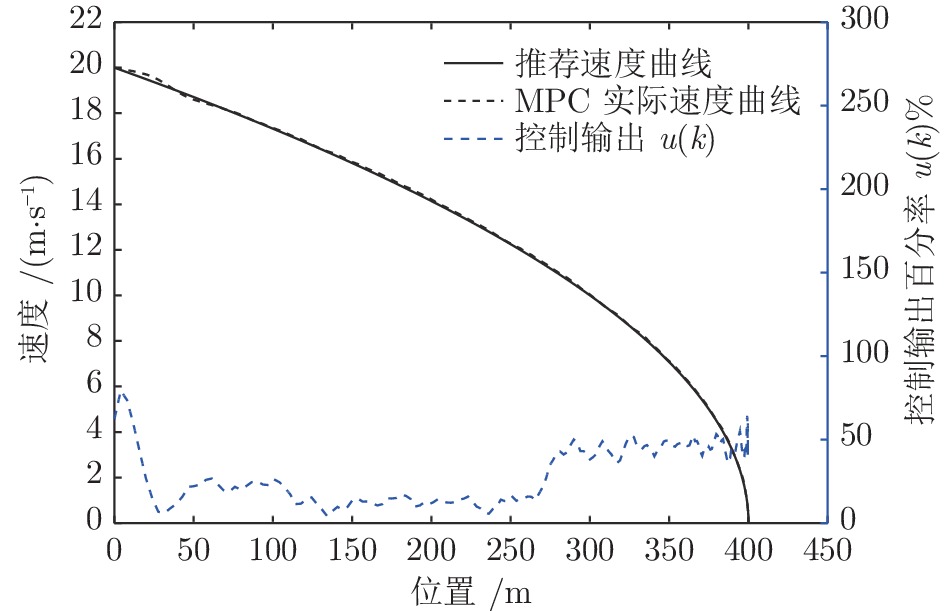
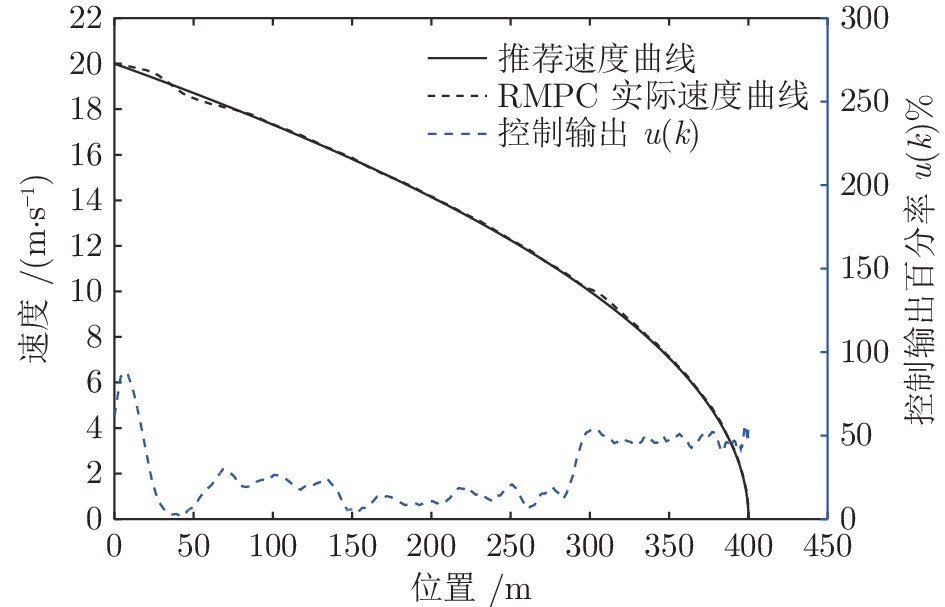
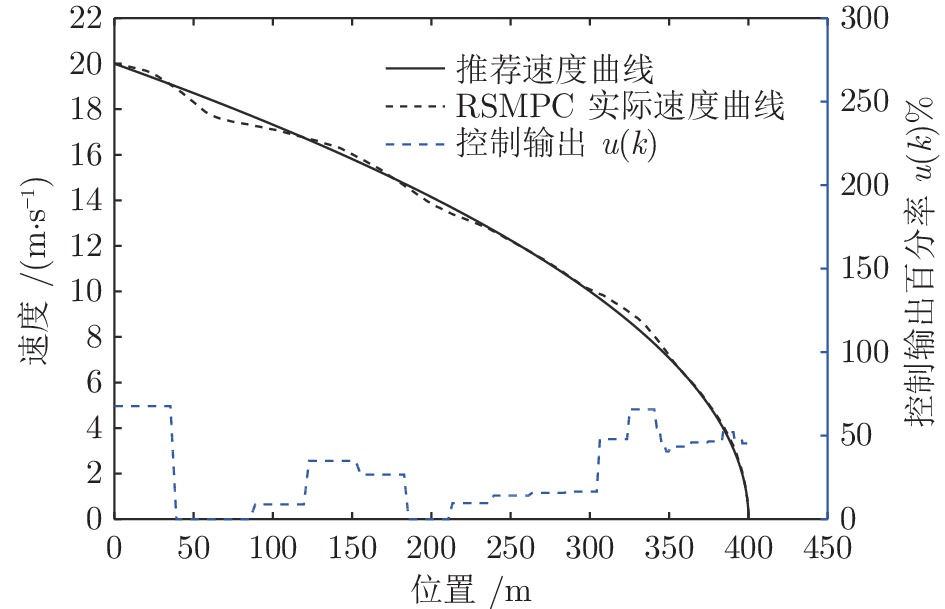
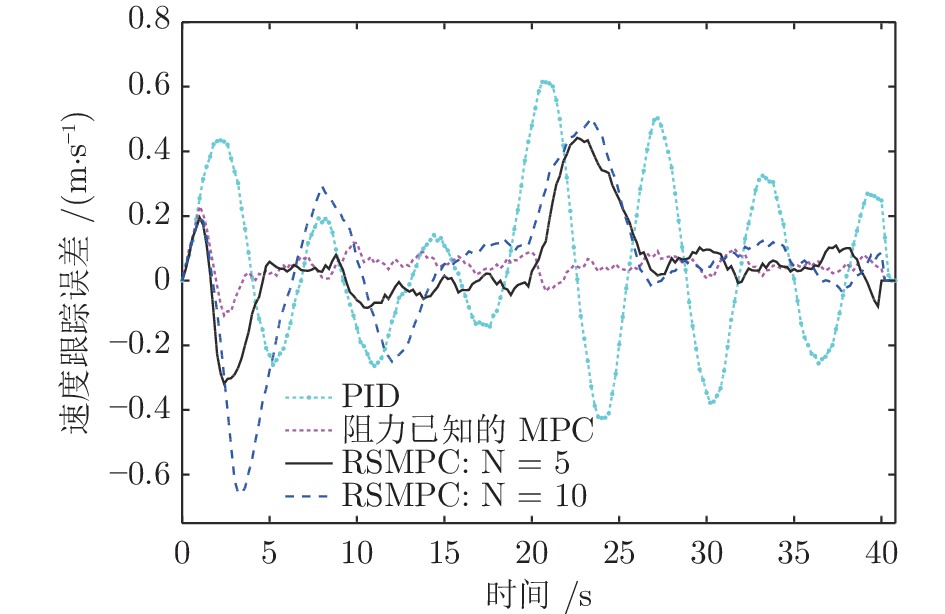
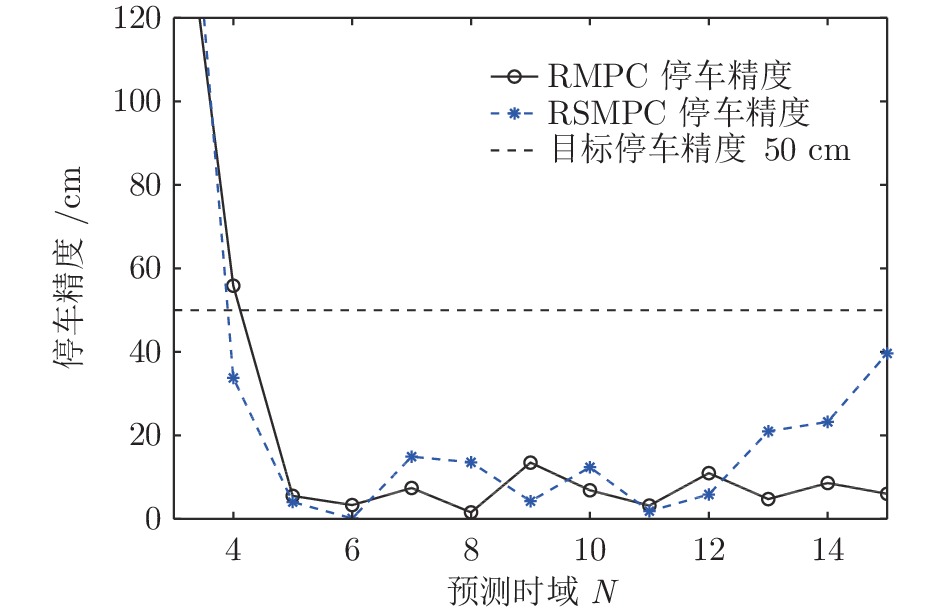
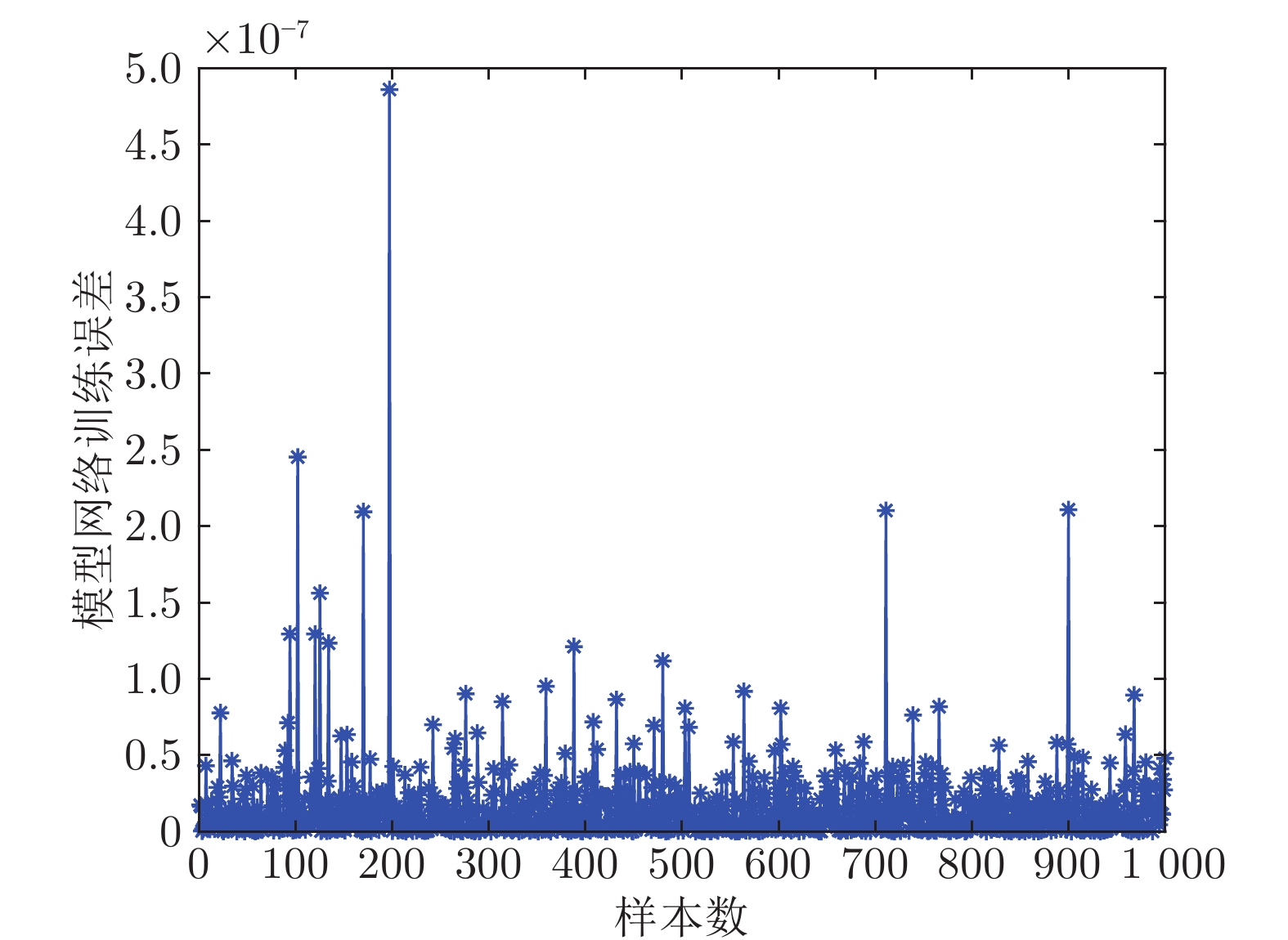
列车精确停车作为列车自动运行(Automatic train operation, ATO)系统的一项核心功能, 对高速列车的安全和高效运行至关重要. 本文针对高速列车停车过程的特点, 考虑在避免控制输出频繁切换的前提下实现高精度的停车曲线跟踪, 提出了基于模型预测控制(Model predictive control, MPC)的精确停车算法. 针对列车停车过程中外部不确定性阻力干扰, 采用鲁棒模型预测控制方法, 提高对外部干扰的鲁棒性. 引入自触发控制策略, 以进一步减少控制输出的频繁切换, 提高停车过程的舒适度. 该方法不需要每个采样时间都求解线性约束二次规划问题, 降低了对系统采样和通信能力的要求, 提高了算法的实用性. 分析结果表明, 高速列车精确停车控制方法的稳定性和性能指标的次优性可以得到保证. 基于高速列车实际运行数据的仿真结果验证了算法的有效性.




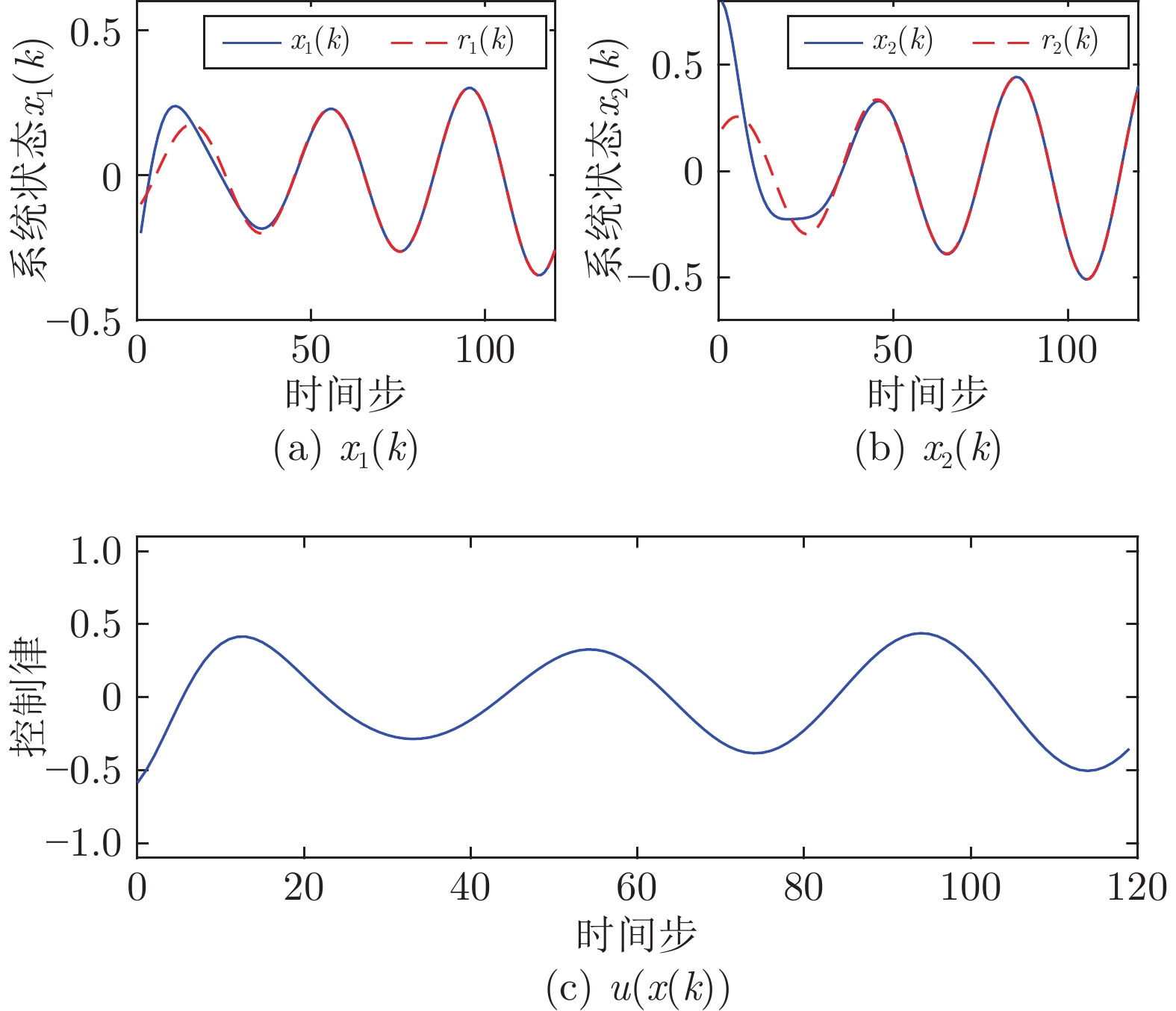
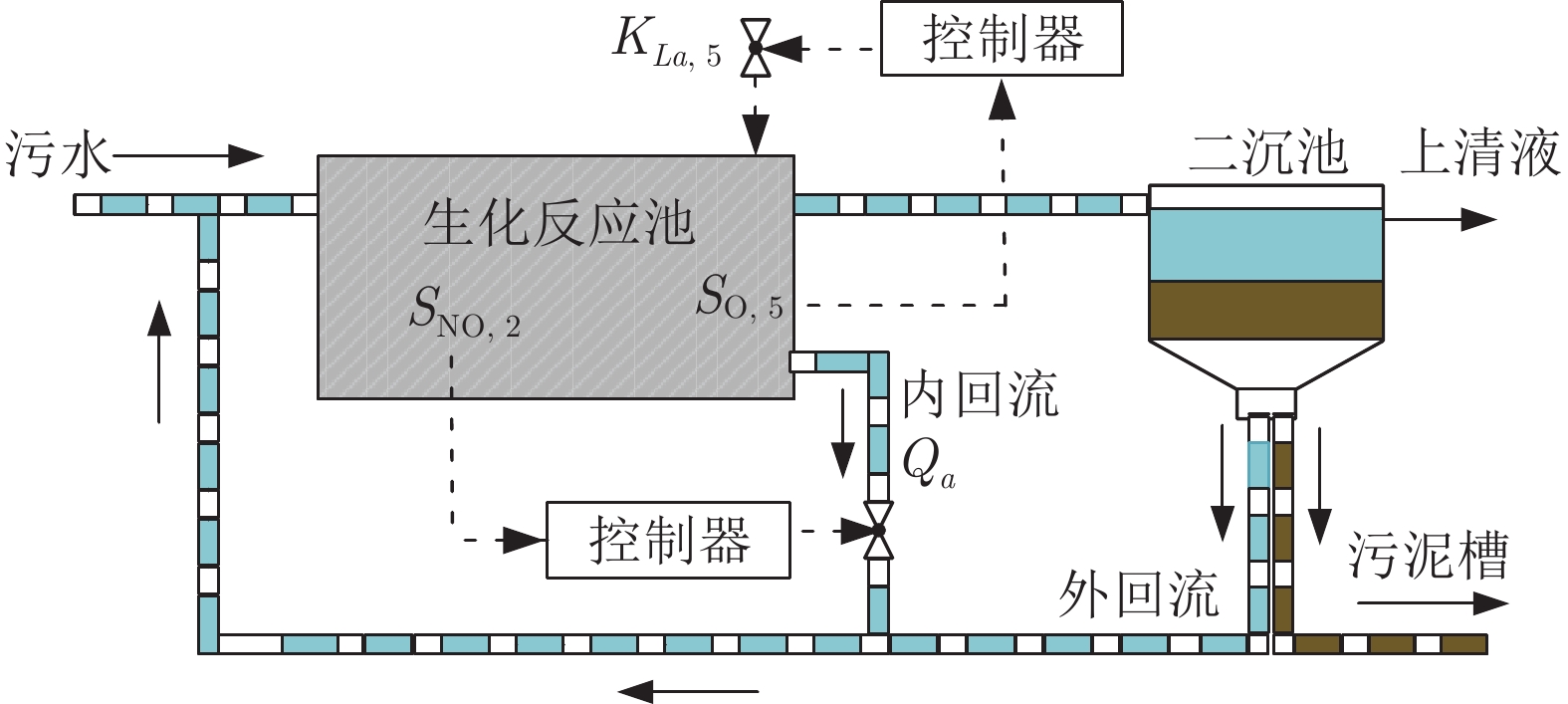
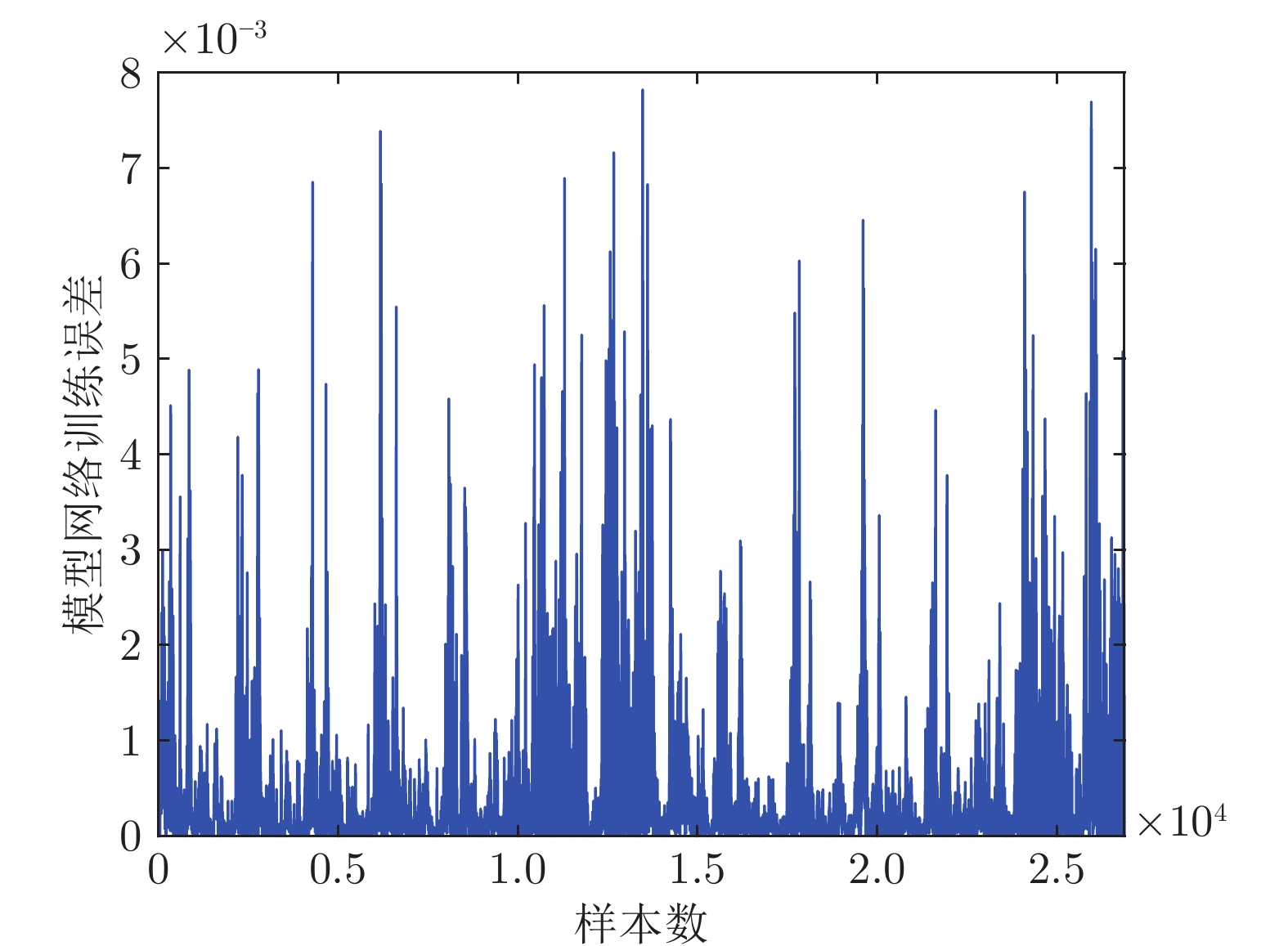
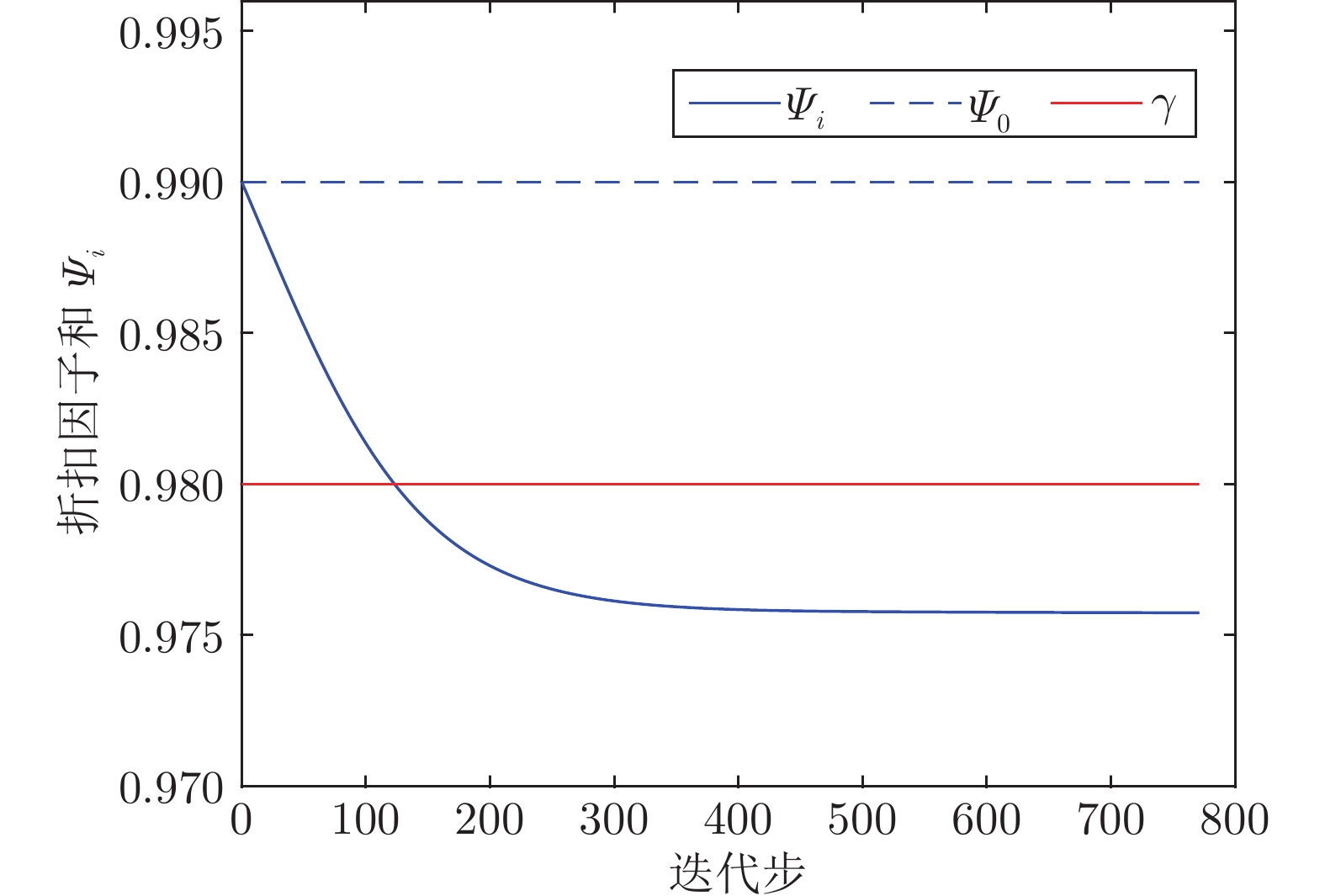
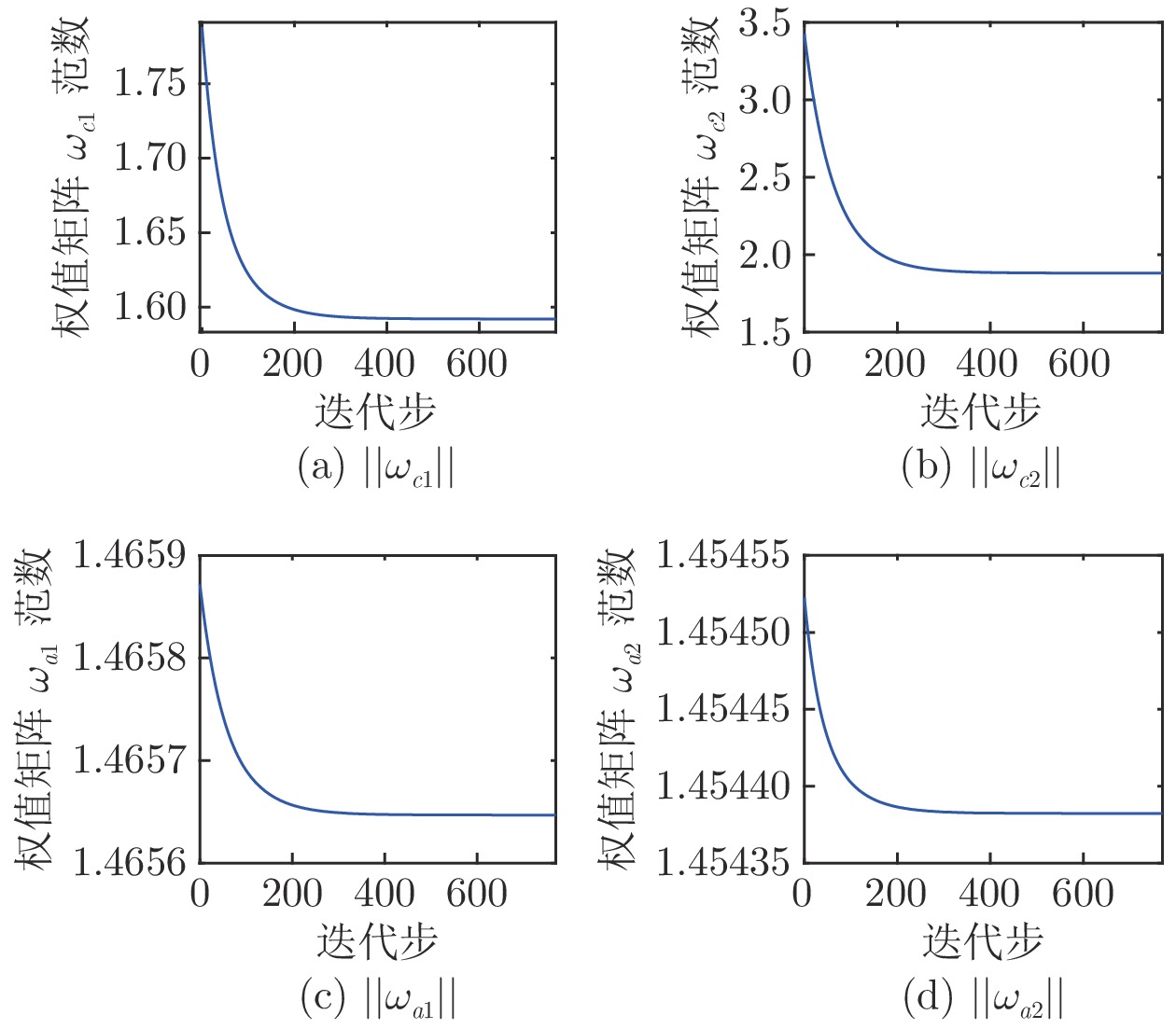
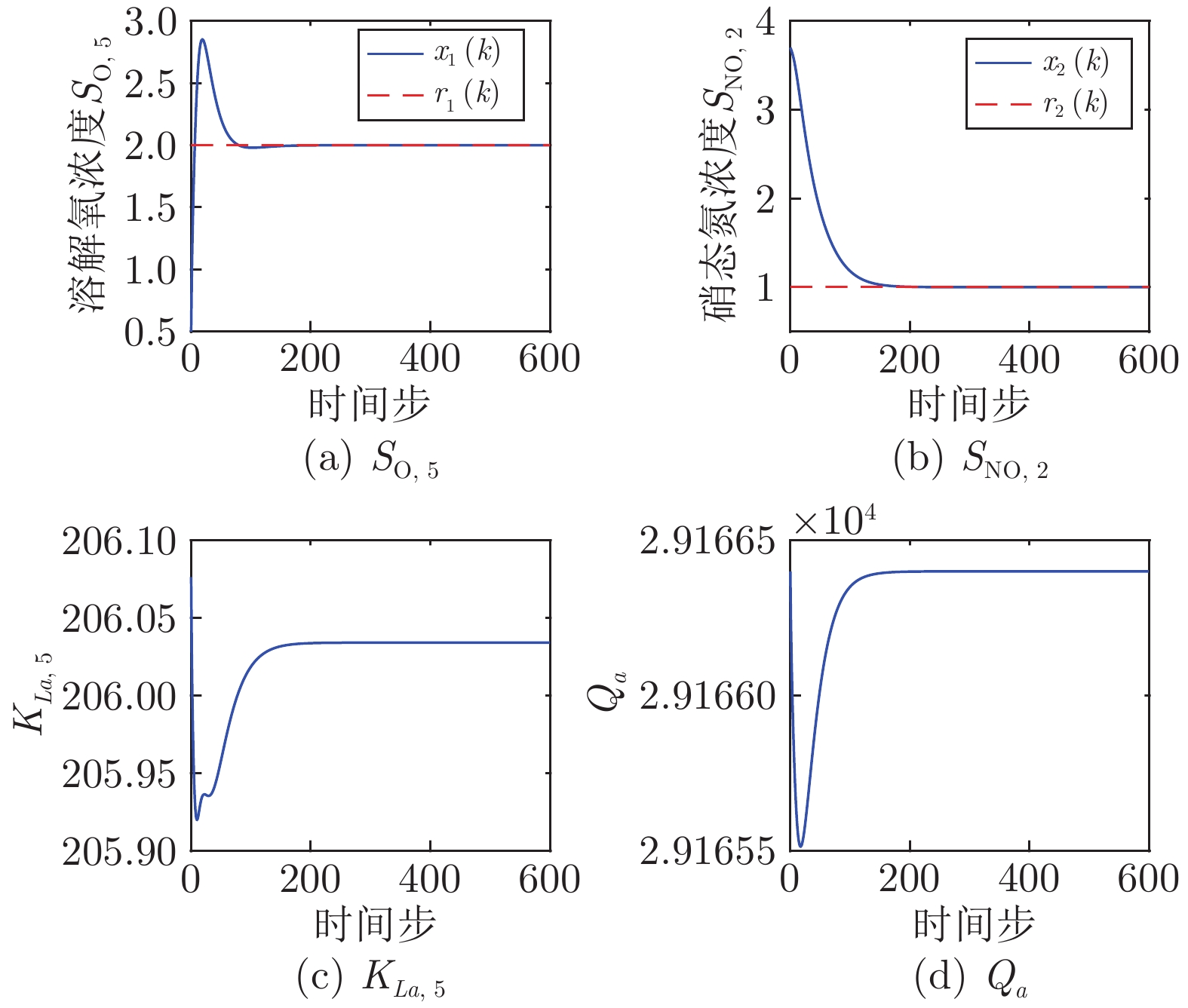
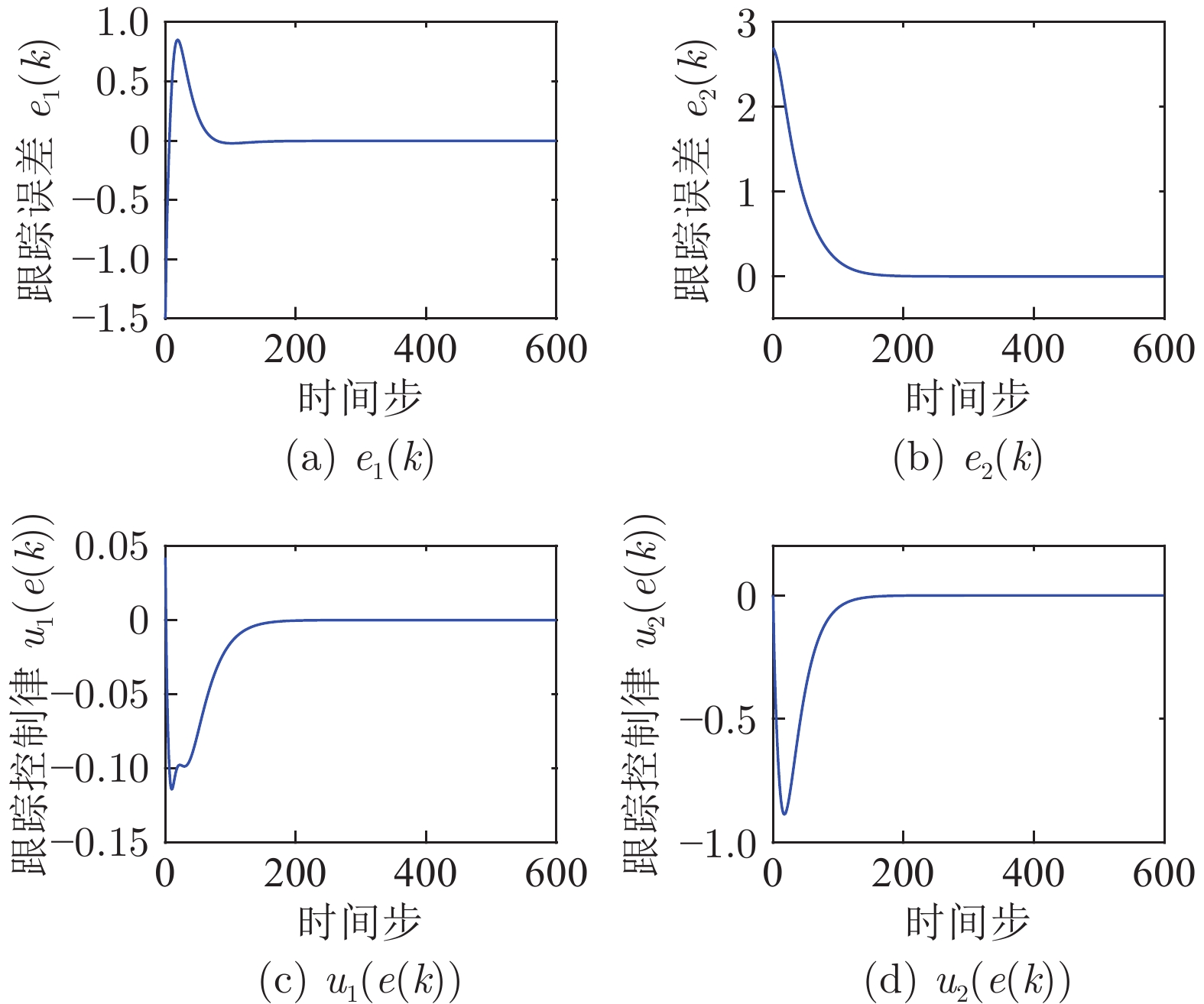
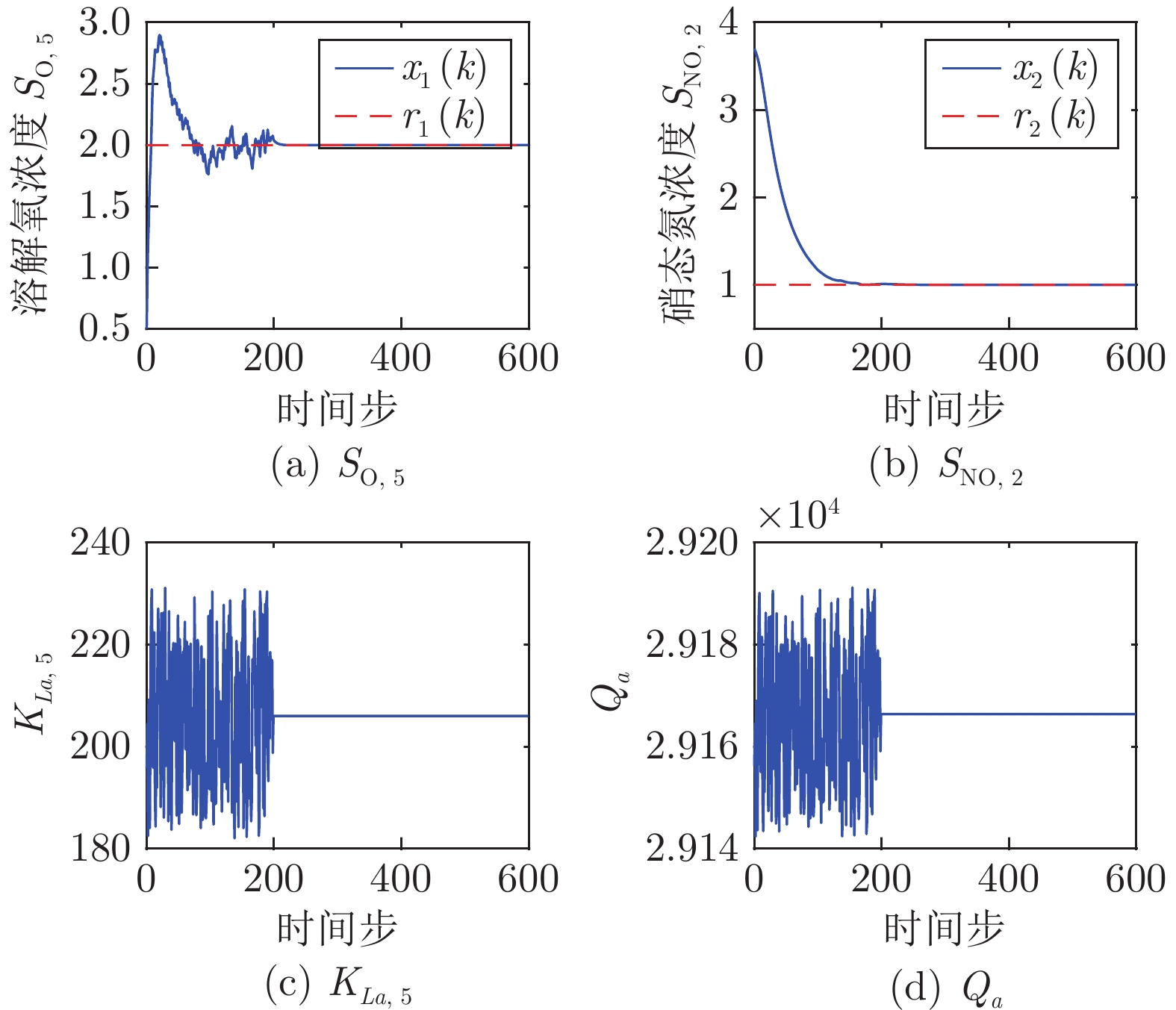
设计了一种基于折扣广义值迭代的智能算法, 用于解决一类复杂非线性系统的最优跟踪控制问题. 通过选取合适的初始值, 值迭代过程中的代价函数将以单调递减的形式收敛到最优代价函数. 基于单调递减的值迭代算法, 在不同折扣因子的作用下, 讨论了迭代跟踪控制律的可容许性和误差系统的渐近稳定性. 为了促进算法的实现, 建立一个数据驱动的模型网络用于学习系统动态信息, 同时构造评判网络和执行网络用于近似迭代代价函数和计算迭代跟踪控制律. 值得注意的是, 我们提出了新颖的停止准则来保证迭代跟踪控制律的有效性. 这种停止准则包含两个条件, 一个条件用来保证迭代跟踪控制律的可用性, 这有利于评估误差系统的渐近稳定性; 而另一个条件用来确保跟踪控制律的近似最优性. 最后, 通过包括污水处理在内的两个应用实例验证了本文提出的近似最优跟踪控制方法的可行性和有效性.





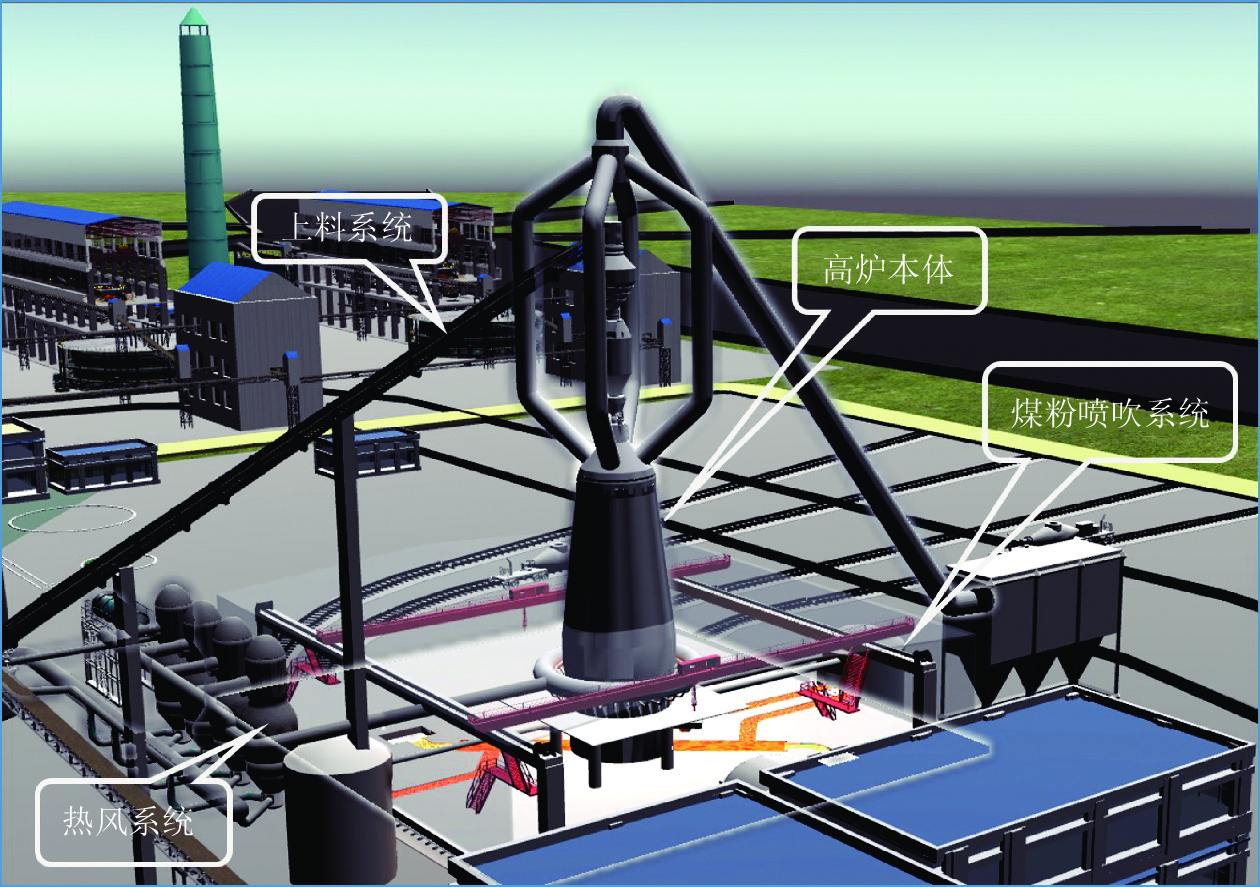
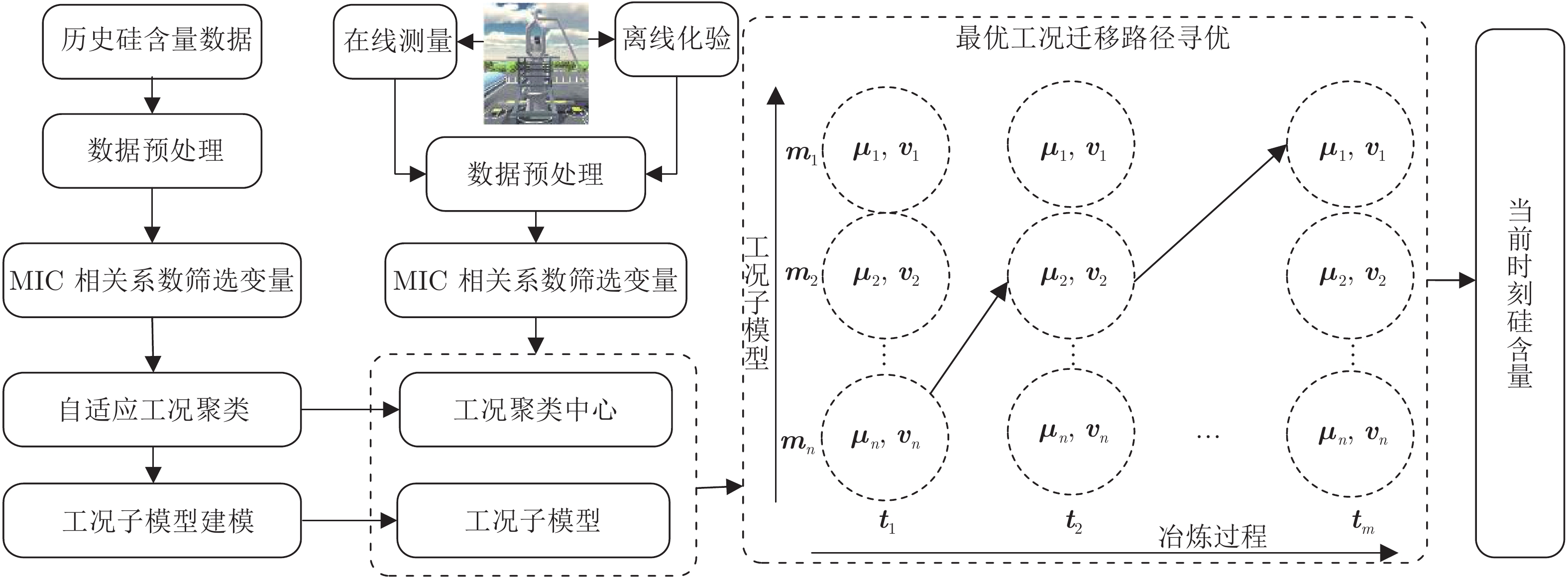
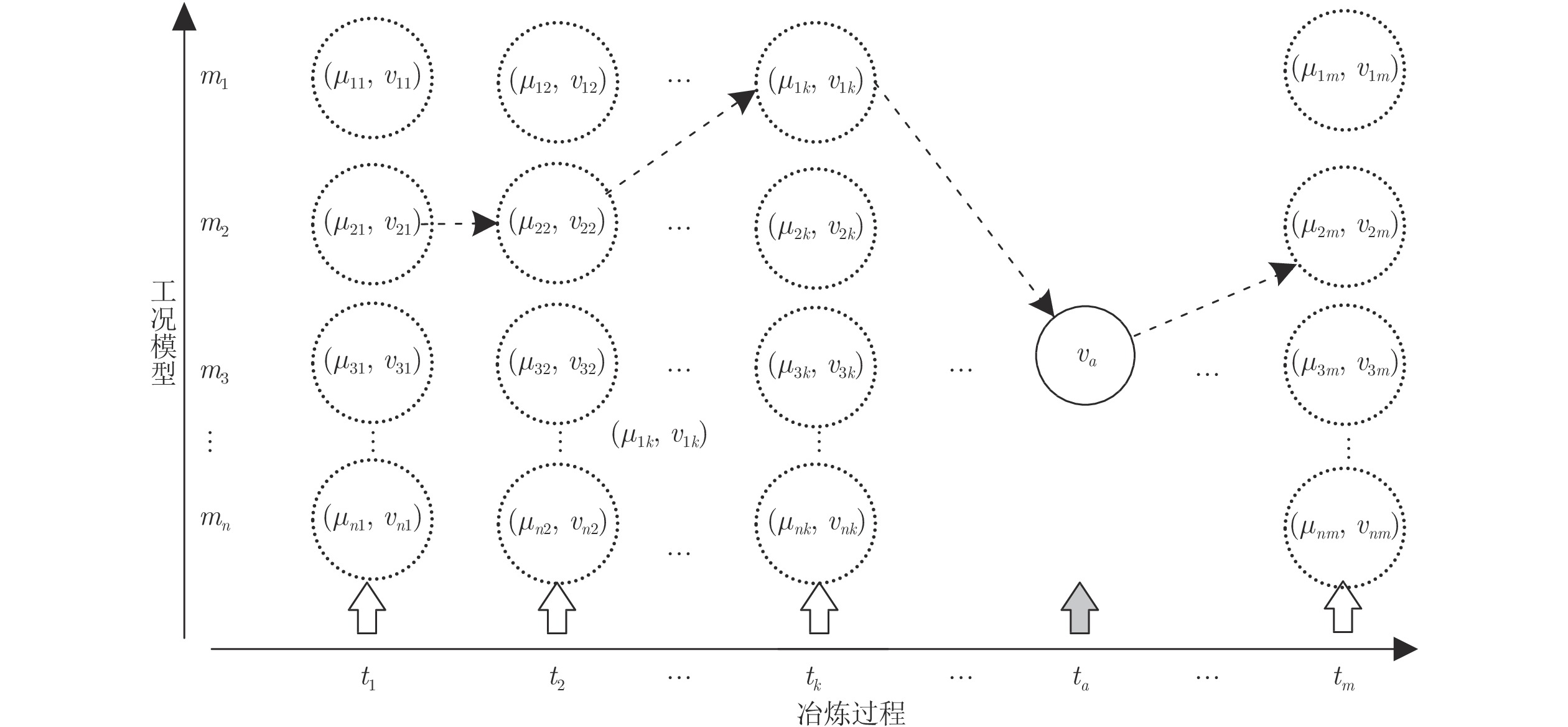
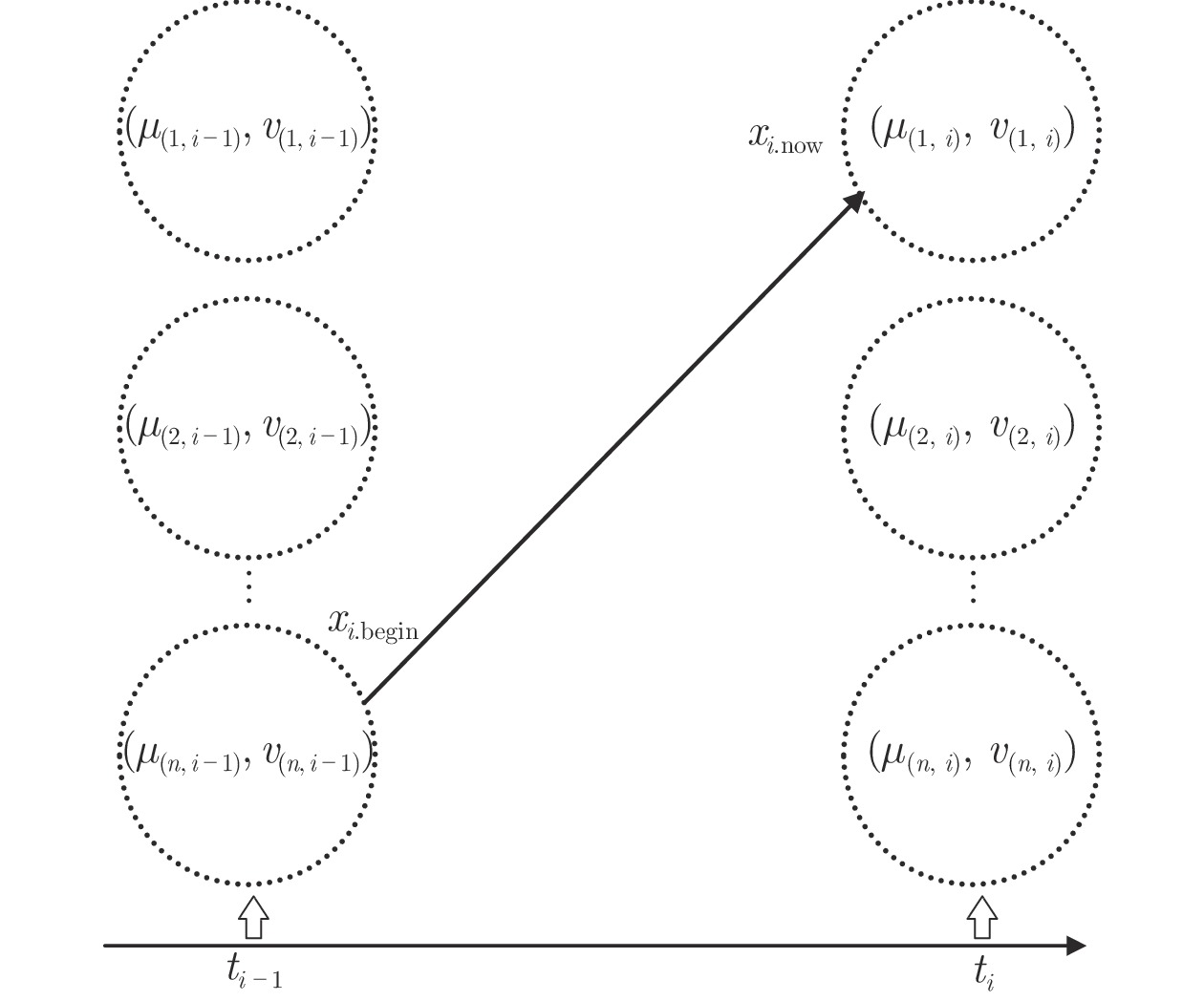
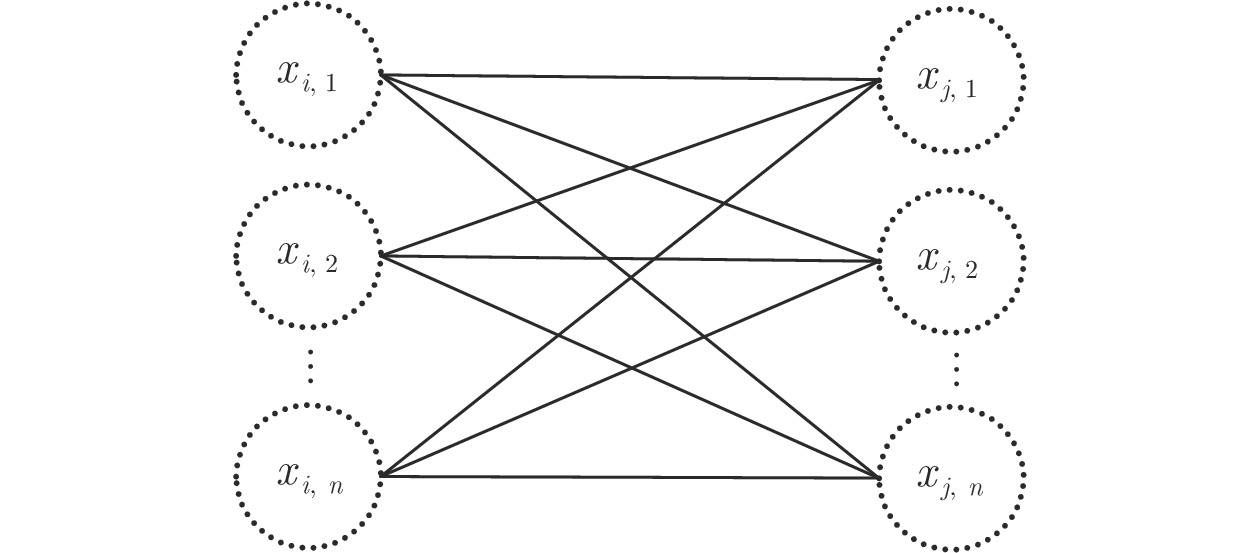
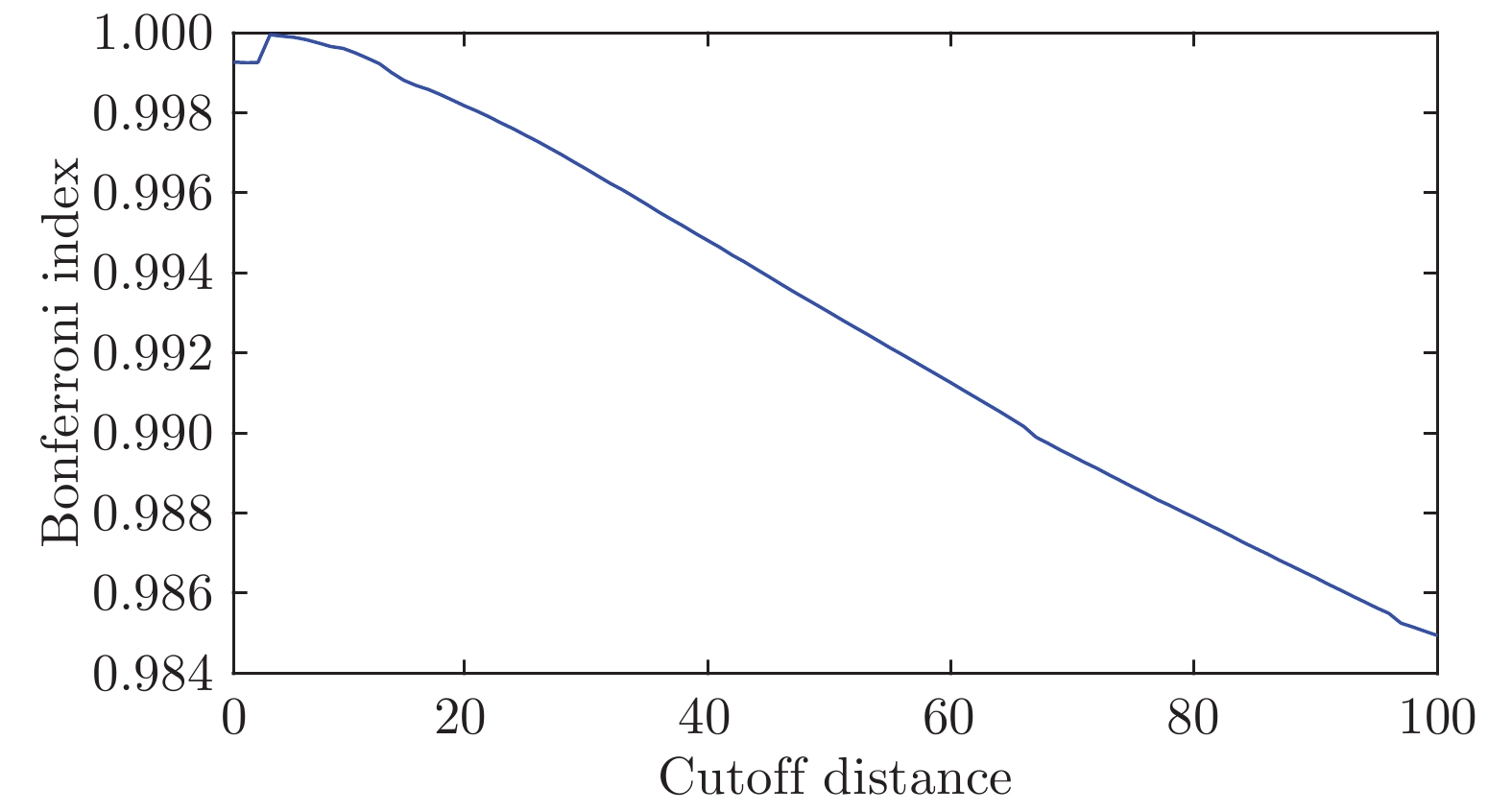
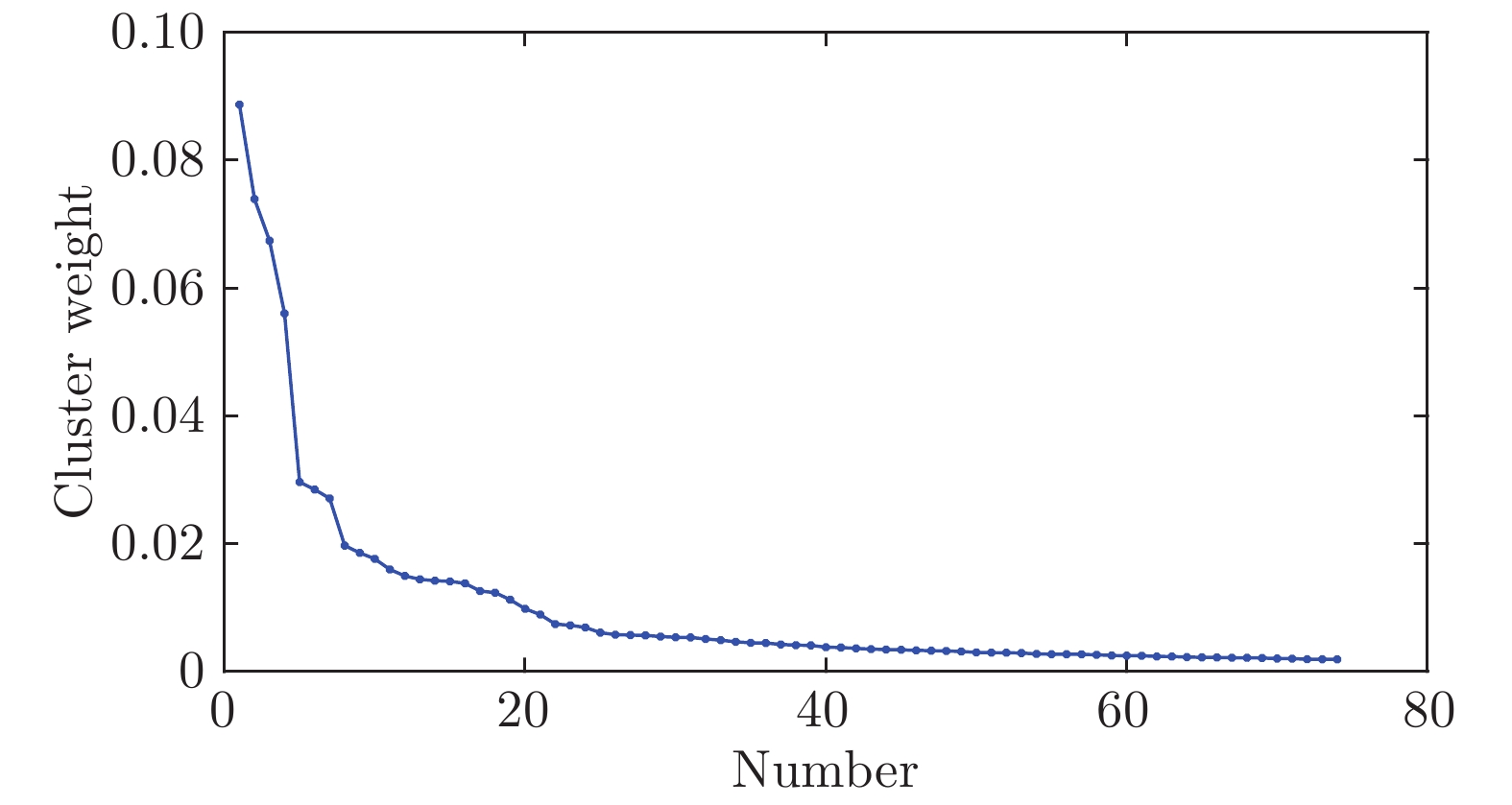
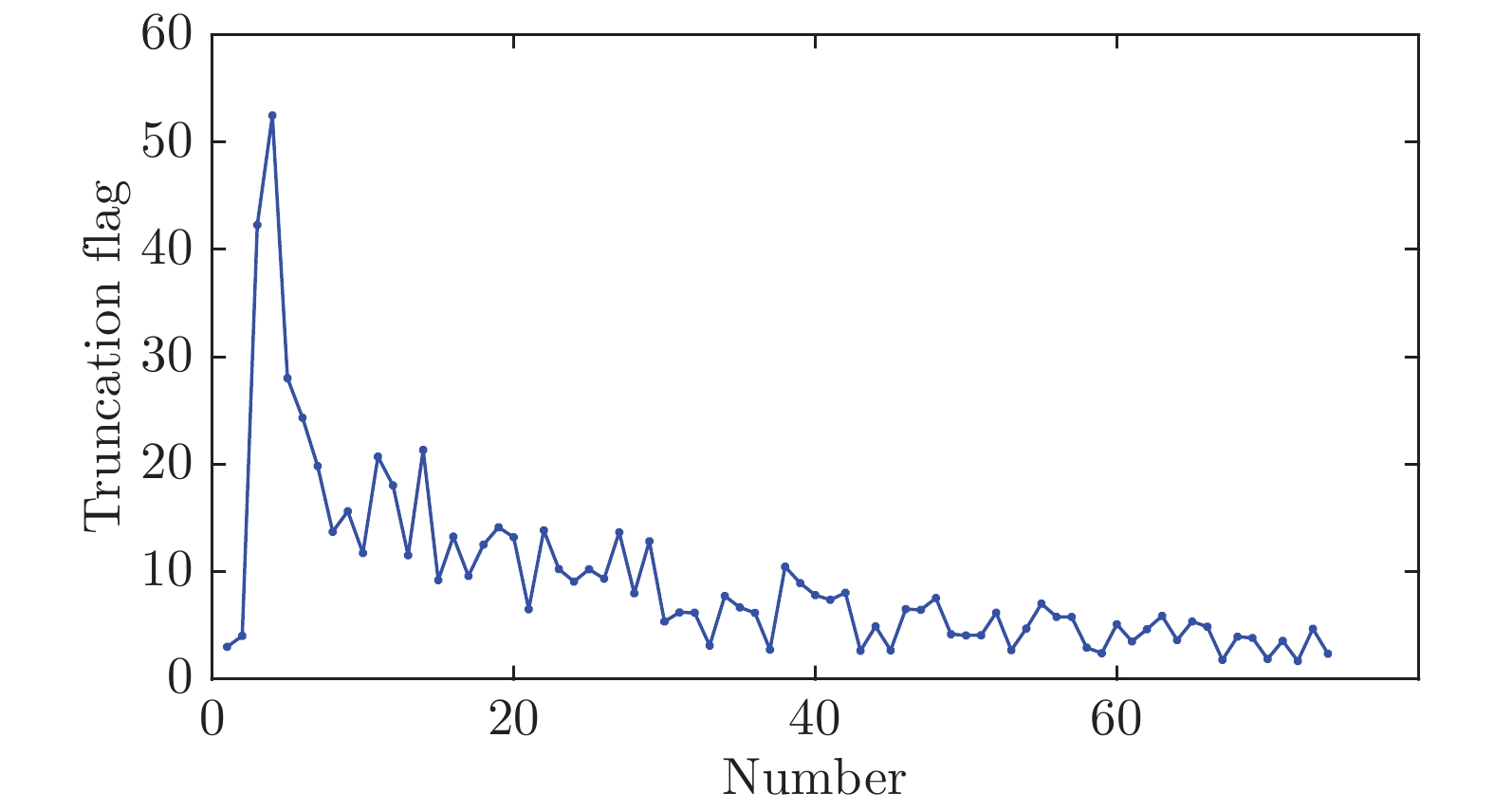
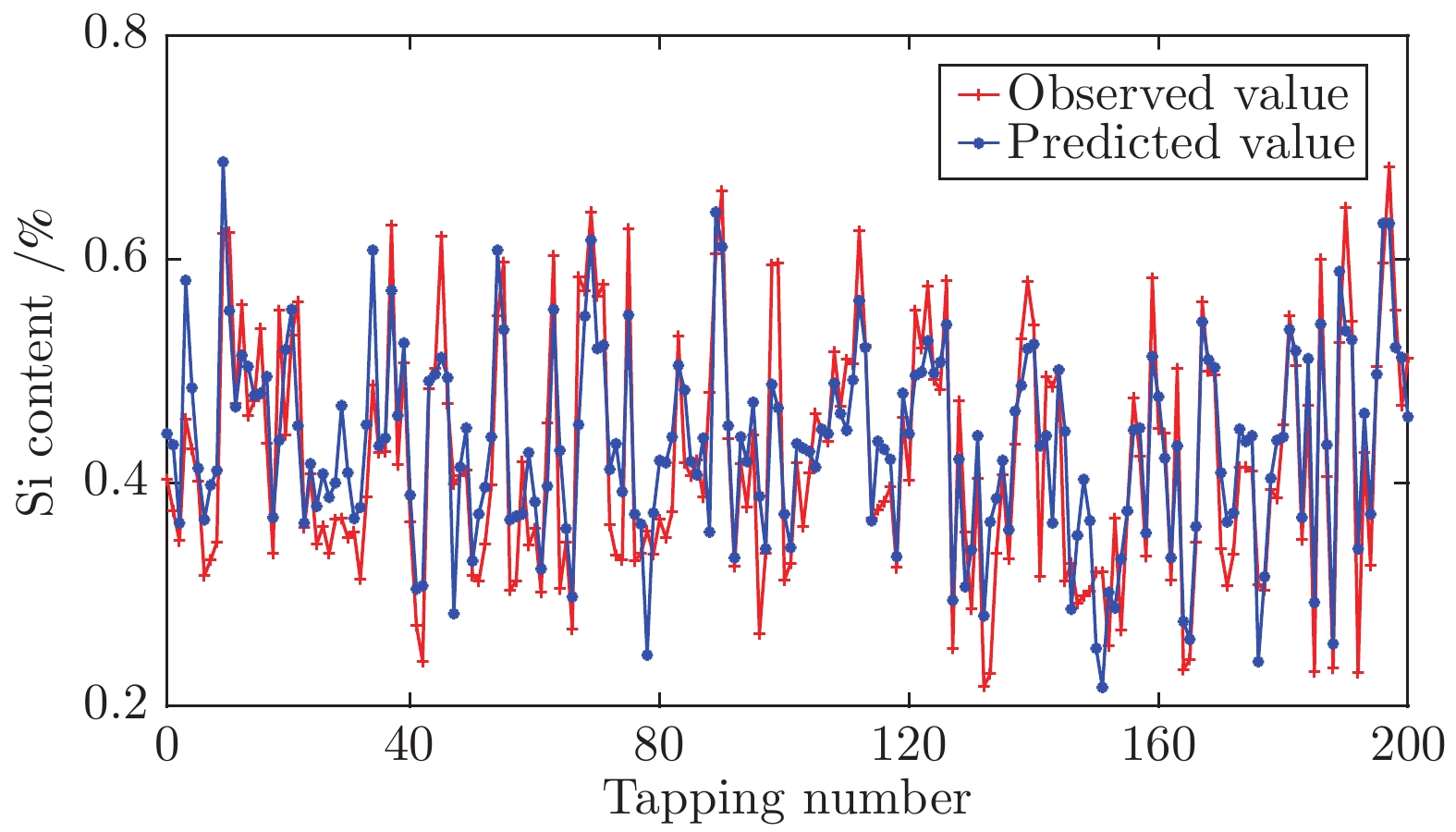
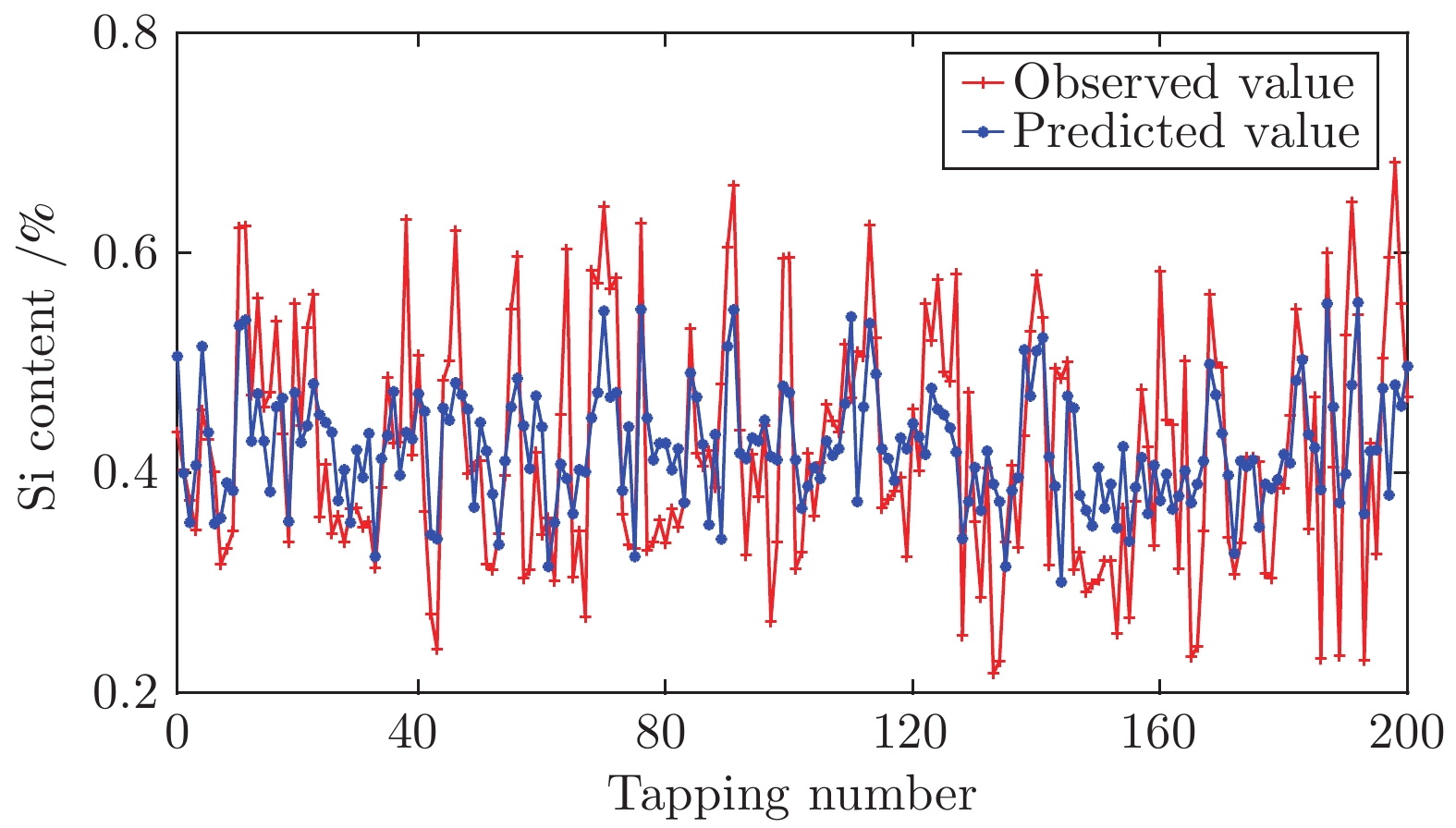
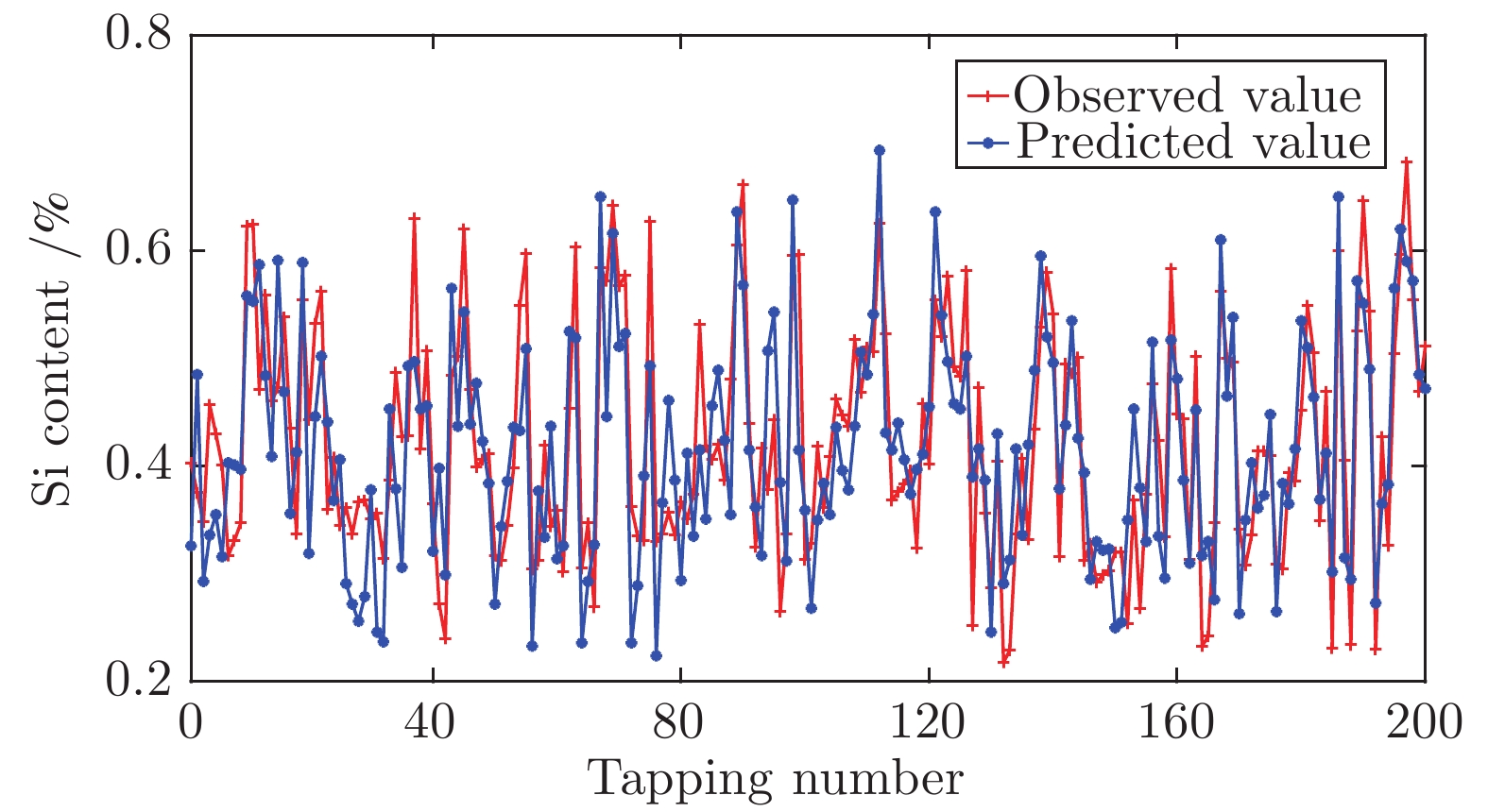
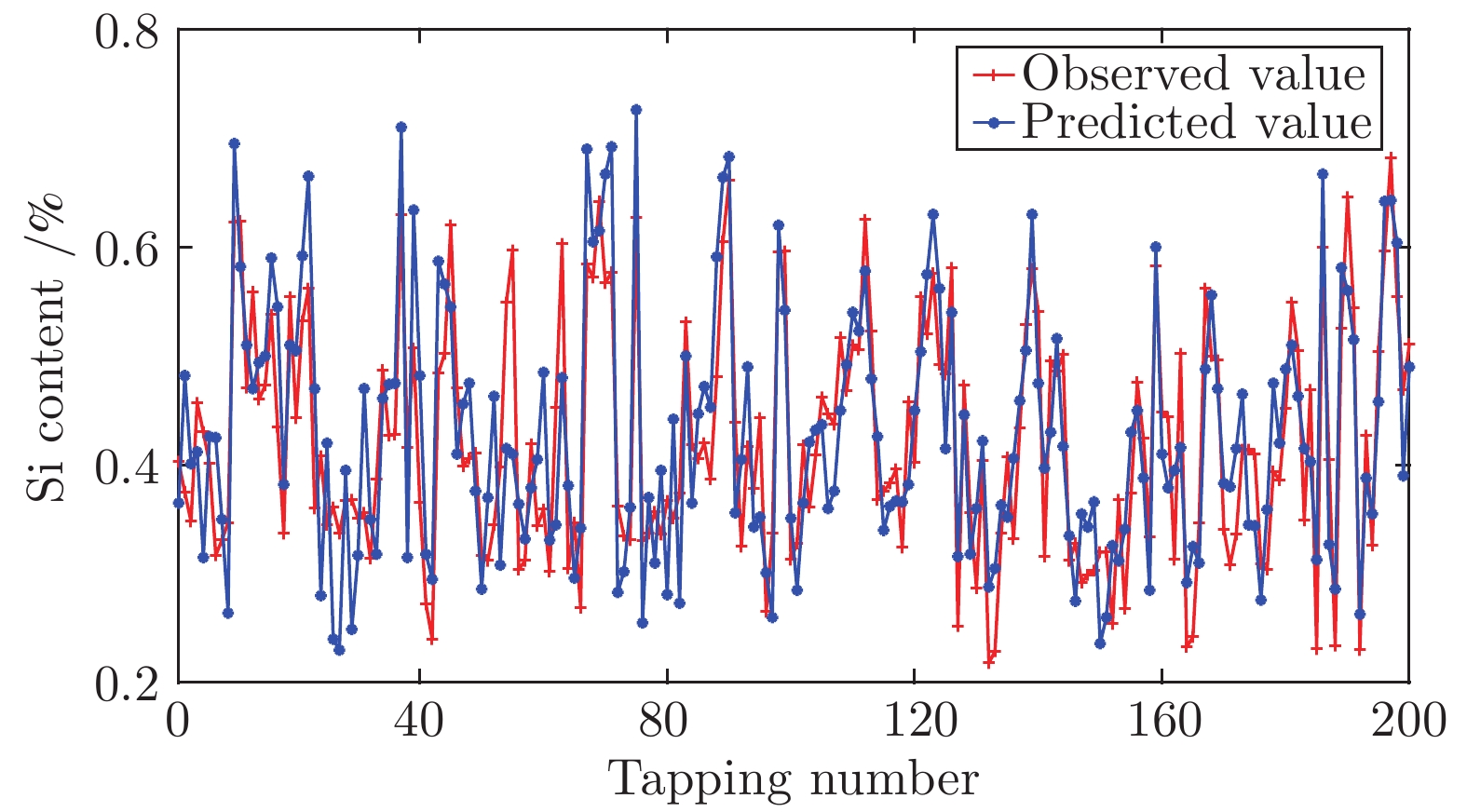
高炉铁水硅含量是铁水品质与炉况的重要表征, 冶炼过程关键参数频繁波动及大时滞特性给高炉铁水硅含量预测带来了巨大挑战. 提出一种基于最优工况迁移的高炉铁水硅含量预测方法. 首先, 针对过程变量频繁波动问题, 提出基于邦费罗尼指数的自适应密度峰值聚类算法, 实现对高炉冶炼过程变量的工况划分, 并建立不同工况硅含量预测子模型. 其次, 针对冶炼过程的大时滞特性, 定义相邻时间节点间的硅含量工况迁移代价函数, 并提出多源路径寻优算法, 实现冶炼过程中硅含量最优工况迁移路径及当前时刻硅含量最优预测值的求解. 最后, 基于工业现场数据验证了所提方法的有效性与准确性.




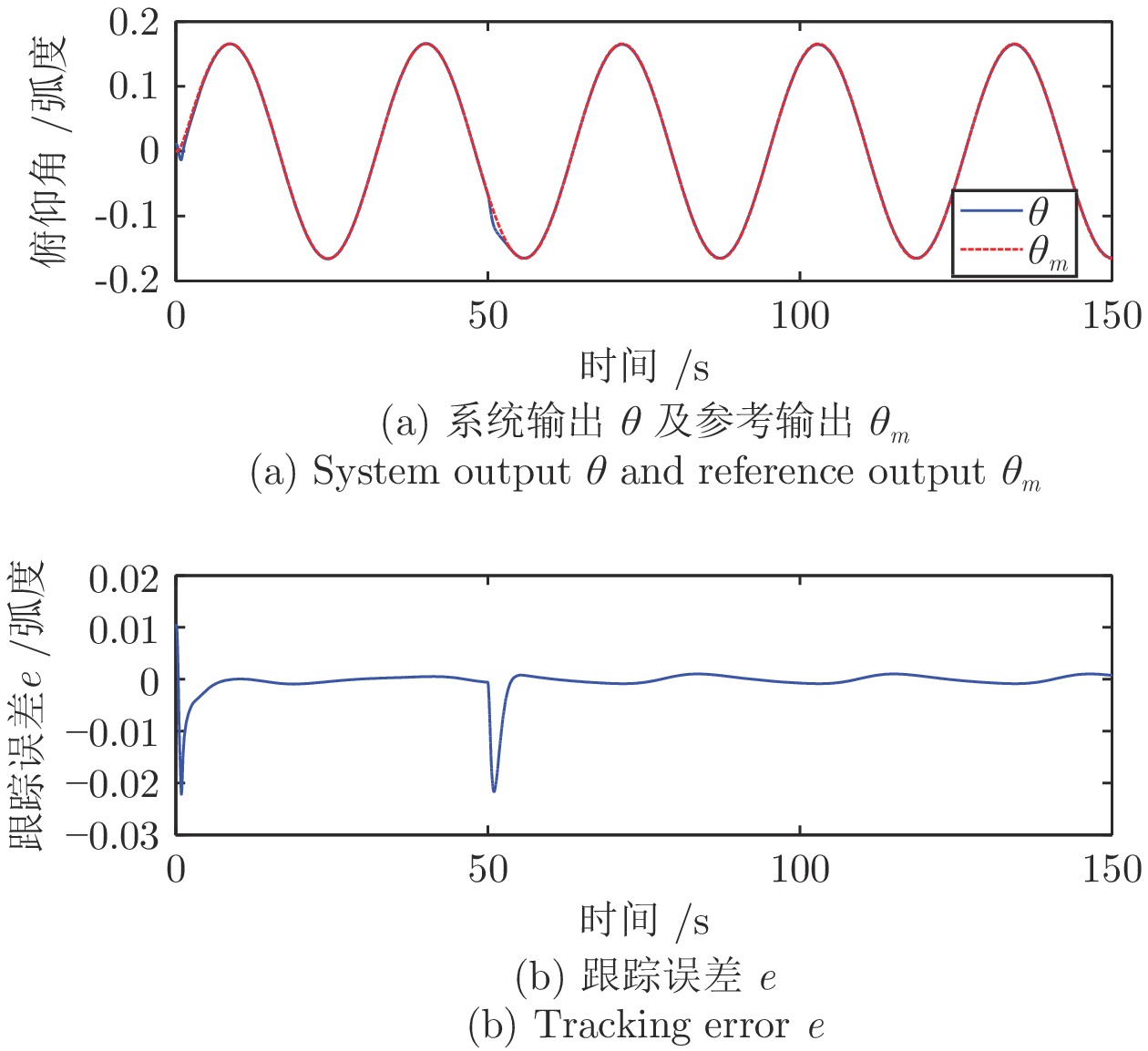
本文针对因多重不确定执行器故障而引起系统动态突变的非线性系统, 设计了一种基于多模型切换的自适应执行器故障补偿控制策略, 以提高系统应对动态突变的能力, 同时实现不确定执行器故障的快速精确补偿. 针对执行器故障模式的不确定性问题, 采用基于多模型的参数估计方法, 设计了自适应控制器组; 基于最优性能指标函数, 提出了一种控制切换机制, 以选择最佳的自适应控制器作为当前的控制器, 从而实现期望的故障补偿控制. 所设计的多模型自适应控制策略, 可以保证所有闭环系统信号有界, 且在出现有限数量的不确定性执行器故障情况下, 系统输出渐近跟踪所选择的参考系统输出; 同时, 当系统中出现持续间歇性执行器故障时, 此方法可以保证系统的输出跟踪误差是平均小的. 最后, 本文基于飞行器动力学模型, 进行仿真研究, 验证了所设计的自适应故障补偿策略的有效性.



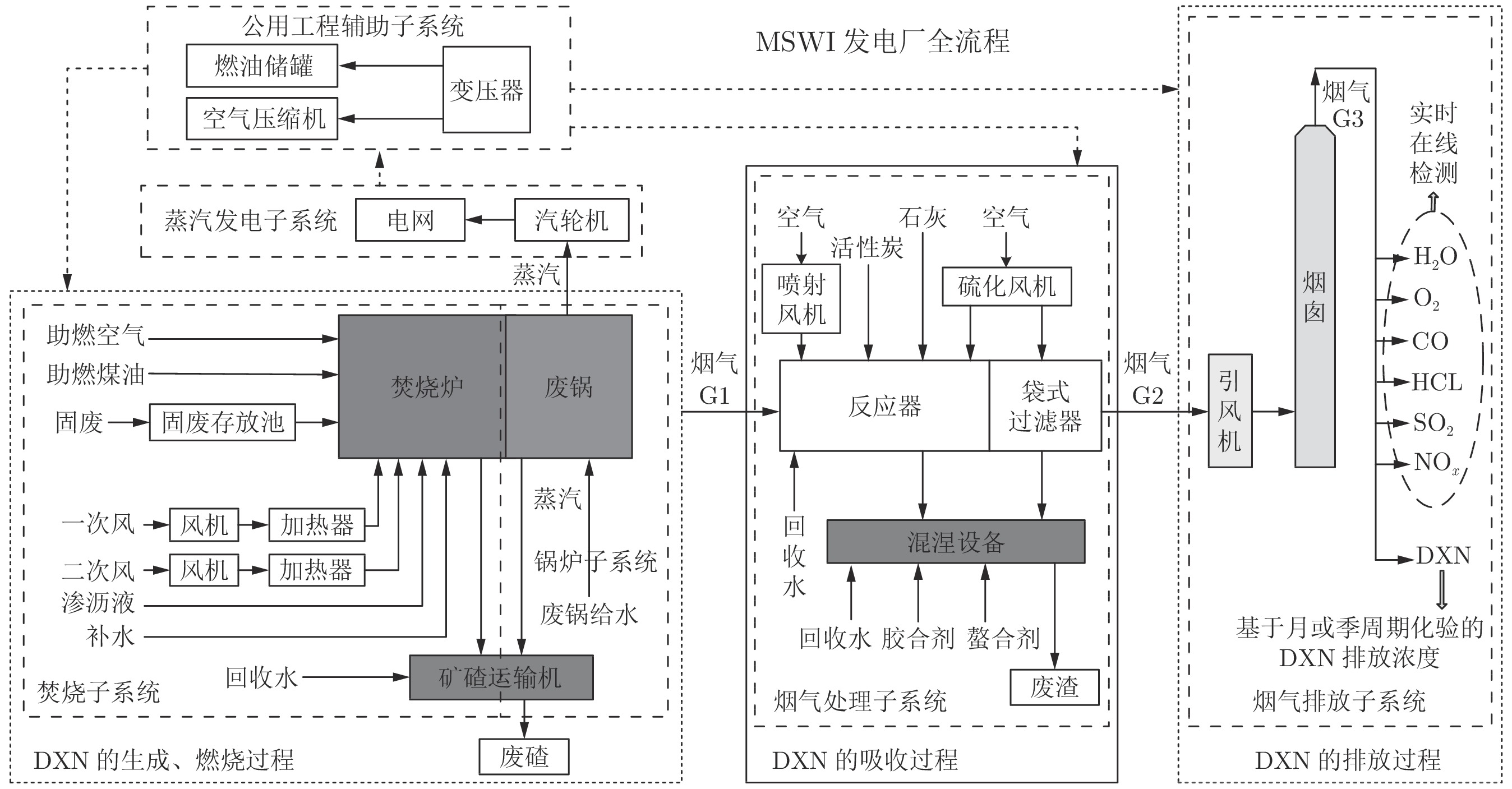
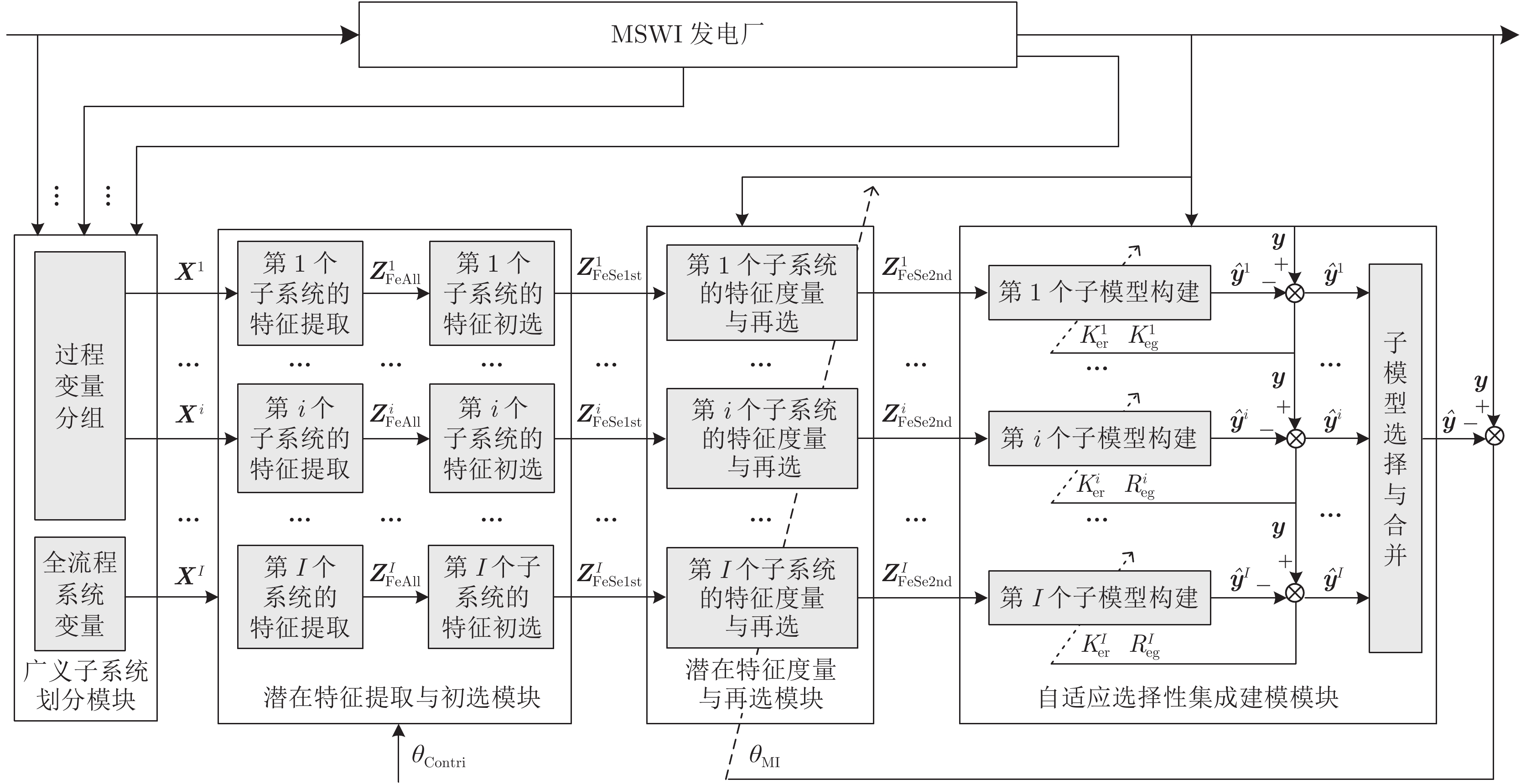
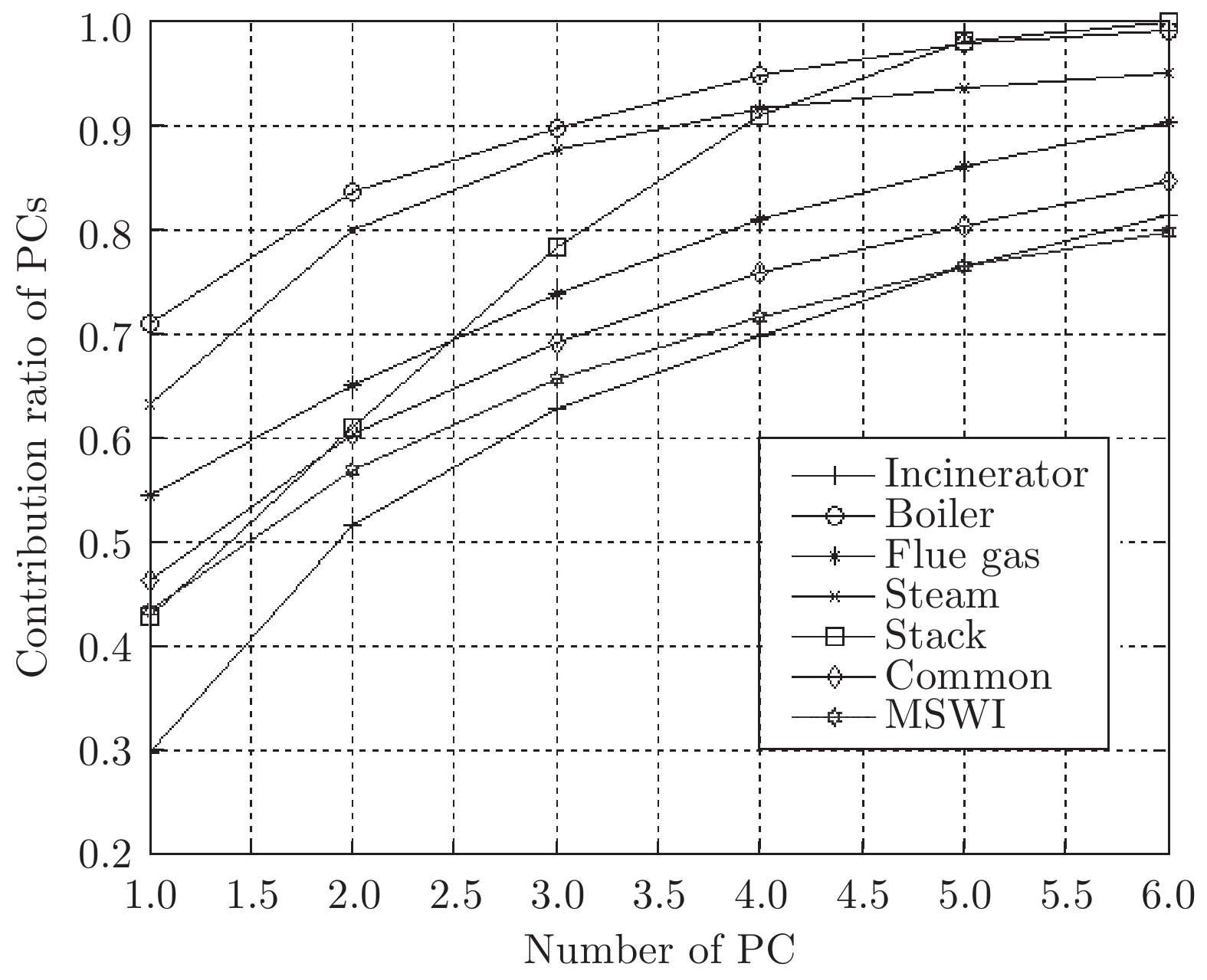
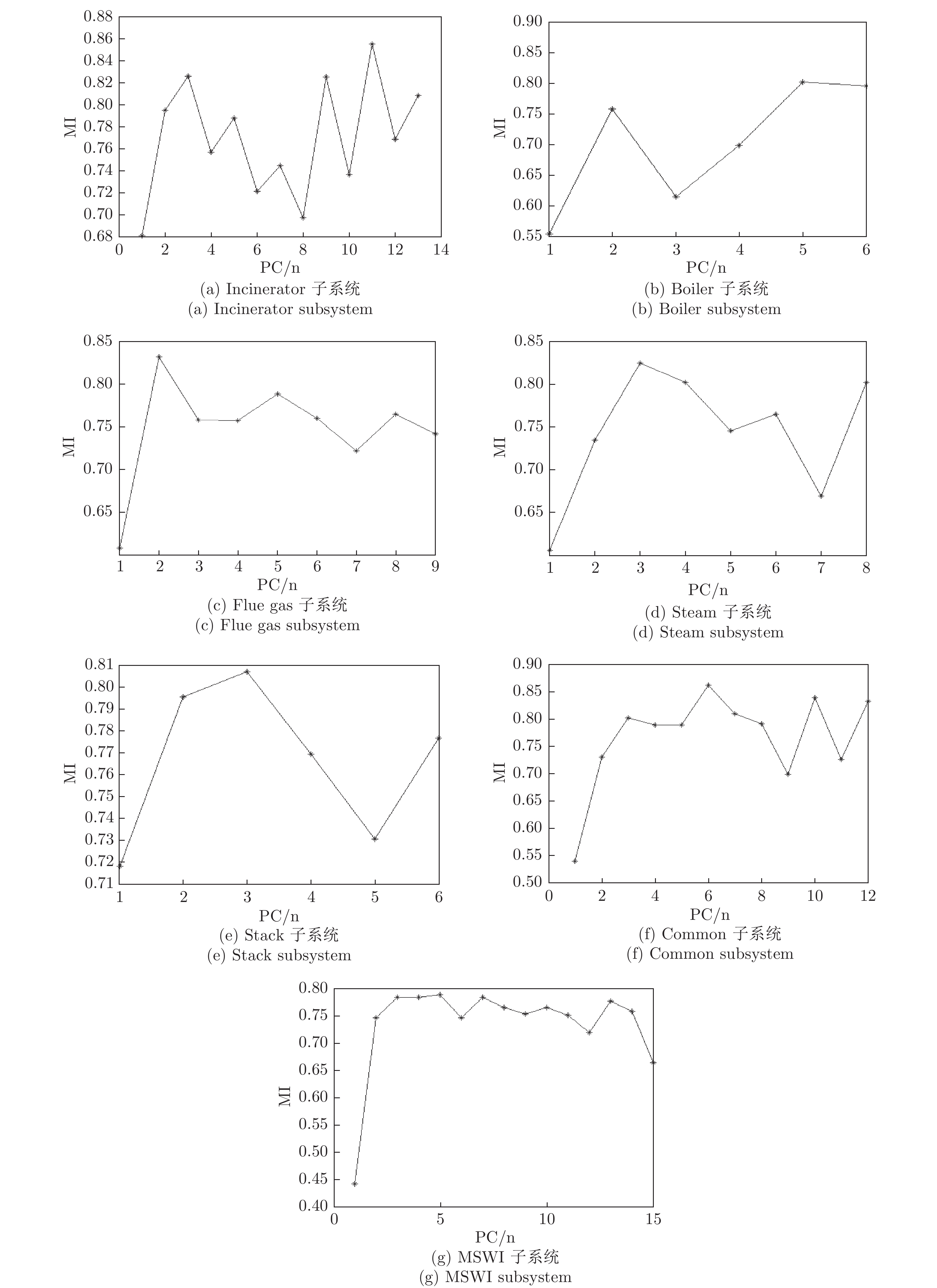
二噁英(Dioxin,DXN)是导致城市固废焚烧(Municipal solid waste incineration, MSWI)建厂存在“邻避现象”的主要原因之一. 工业现场多采用离线化验手段检测DXN浓度, 难以满足污染物减排控制的需求. 针对上述问题, 本文提出了基于潜在特征选择性集成(Selective ensemble, SEN)建模的DXN排放浓度软测量方法. 首先, 采用主元分析(Principal component analysis, PCA)分别提取依据工艺阶段子系统及全流程系统过程变量的潜在特征, 并依据预设贡献率阈值进行特征初选; 接着, 采用互信息(Mutual information, MI)度量初选特征与DXN间的相关性, 并自适应确定再选的上下限及阈值; 最后, 采用具有超参数自适应选择机制的最小二乘−支持向量机(Least squares — support vector machine, LS-SVM)算法建立多源特征的候选子模型, 基于分支定界(Branch and bound, BB)优化和预测误差信息熵加权算法进行集成子模型的优化选择和加权组合, 进而得到软测量模型. 基于某MSWI焚烧厂DXN检测数据仿真验证了所提方法的有效性.


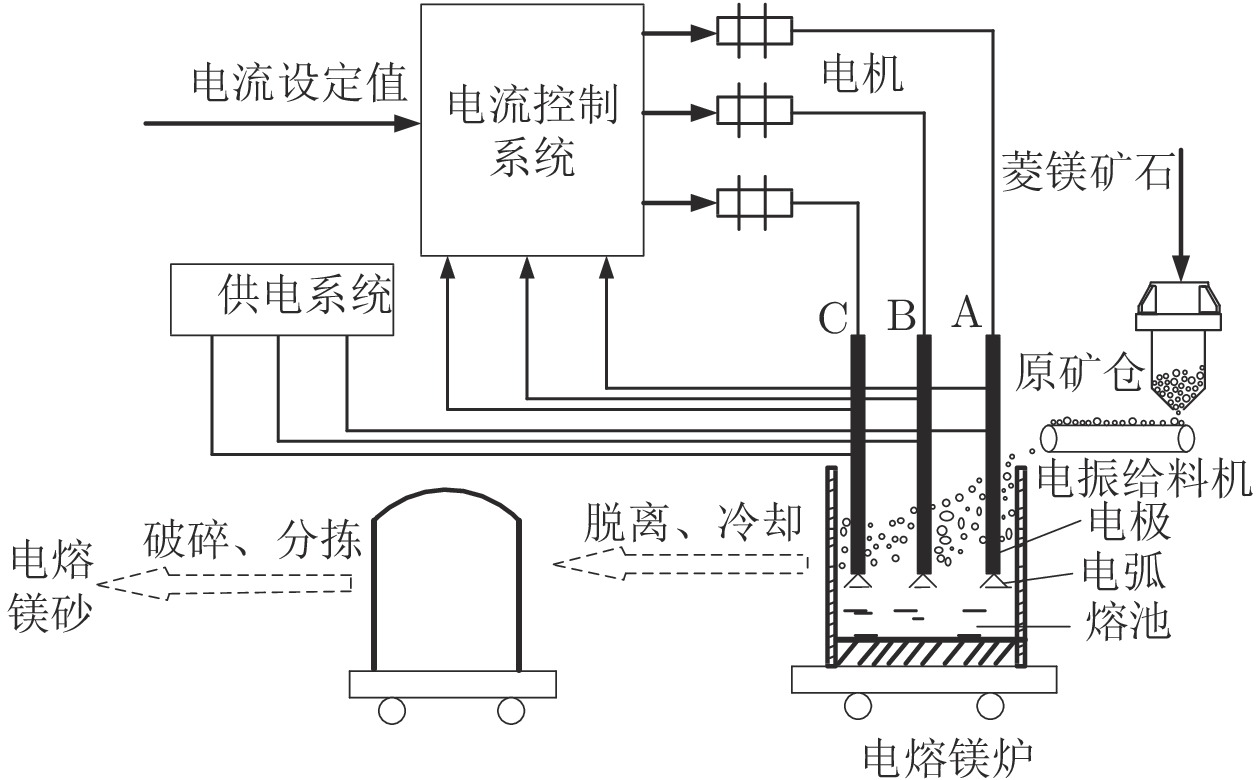
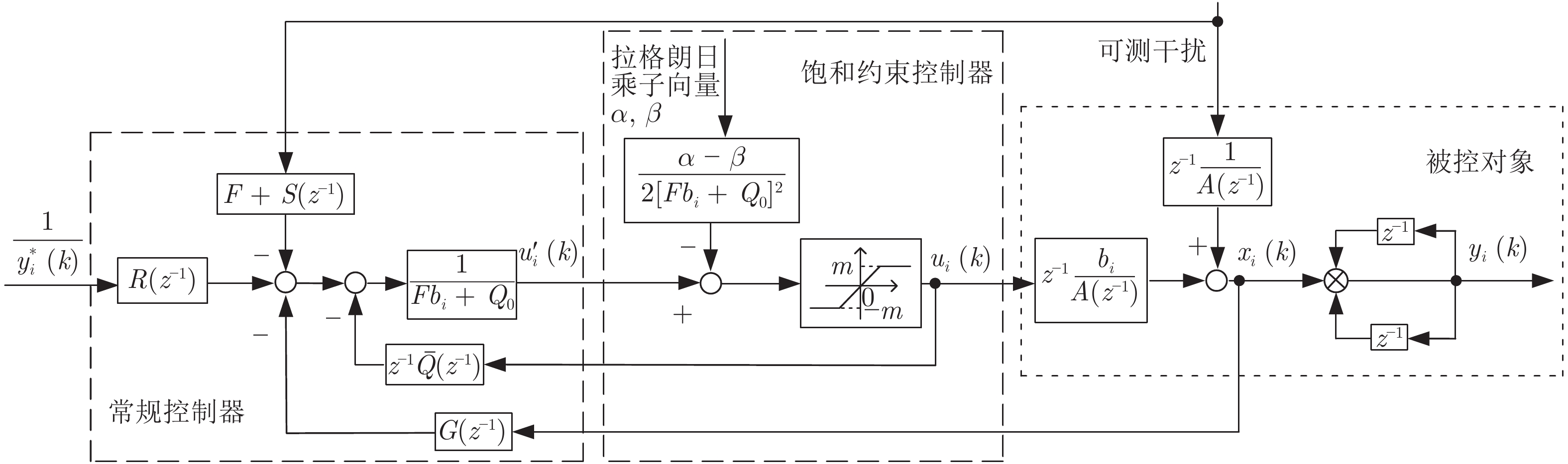
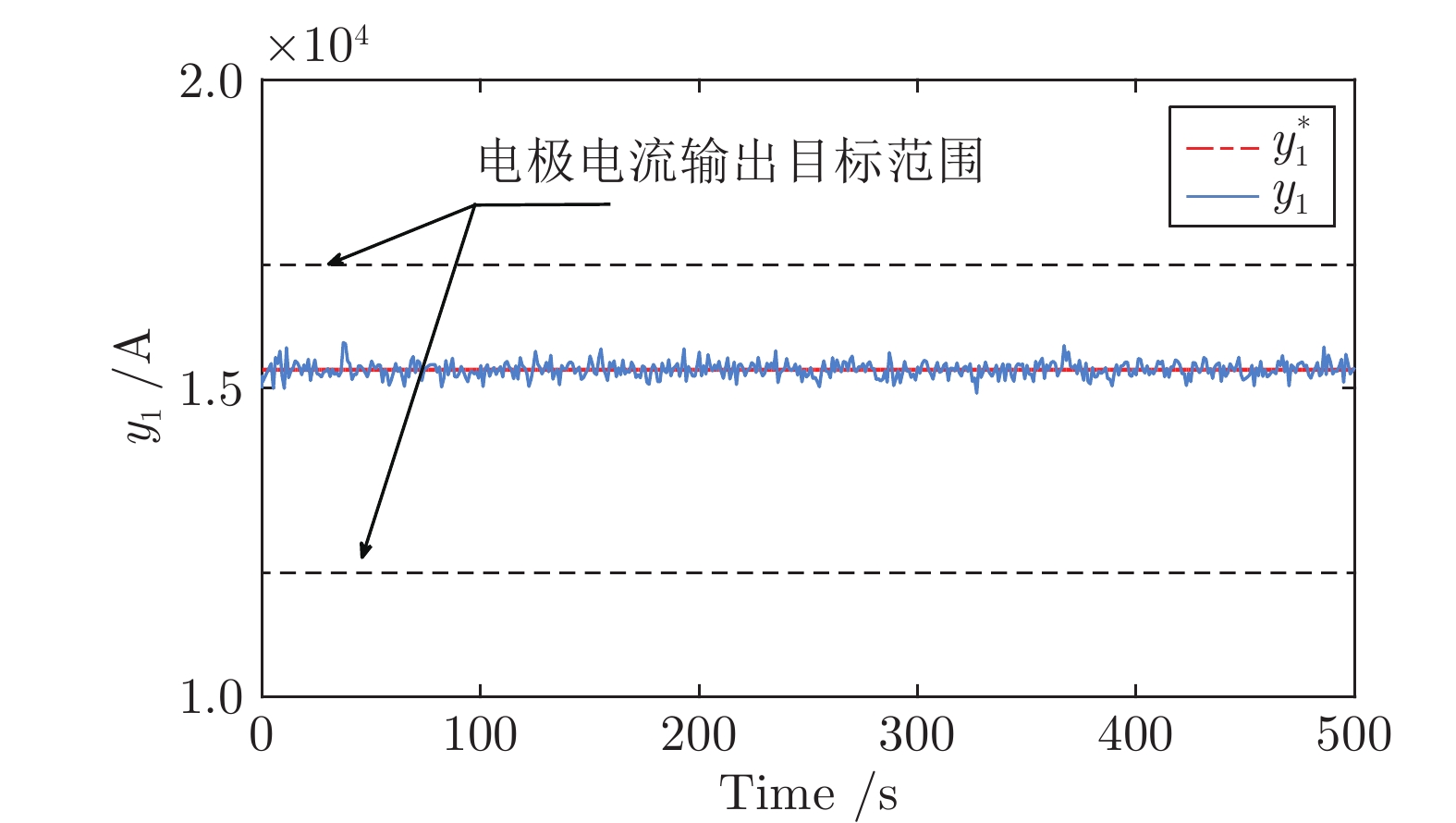
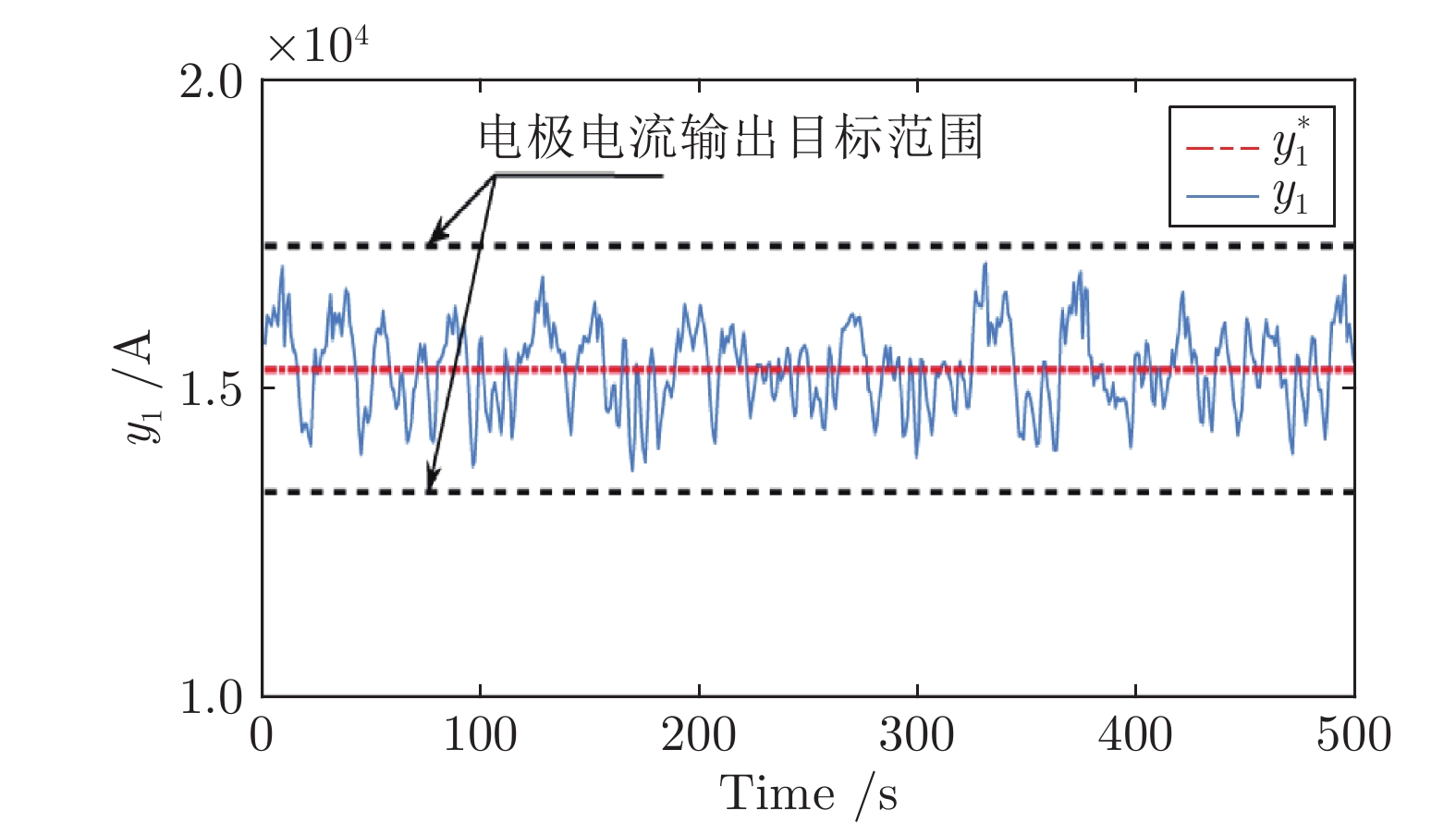
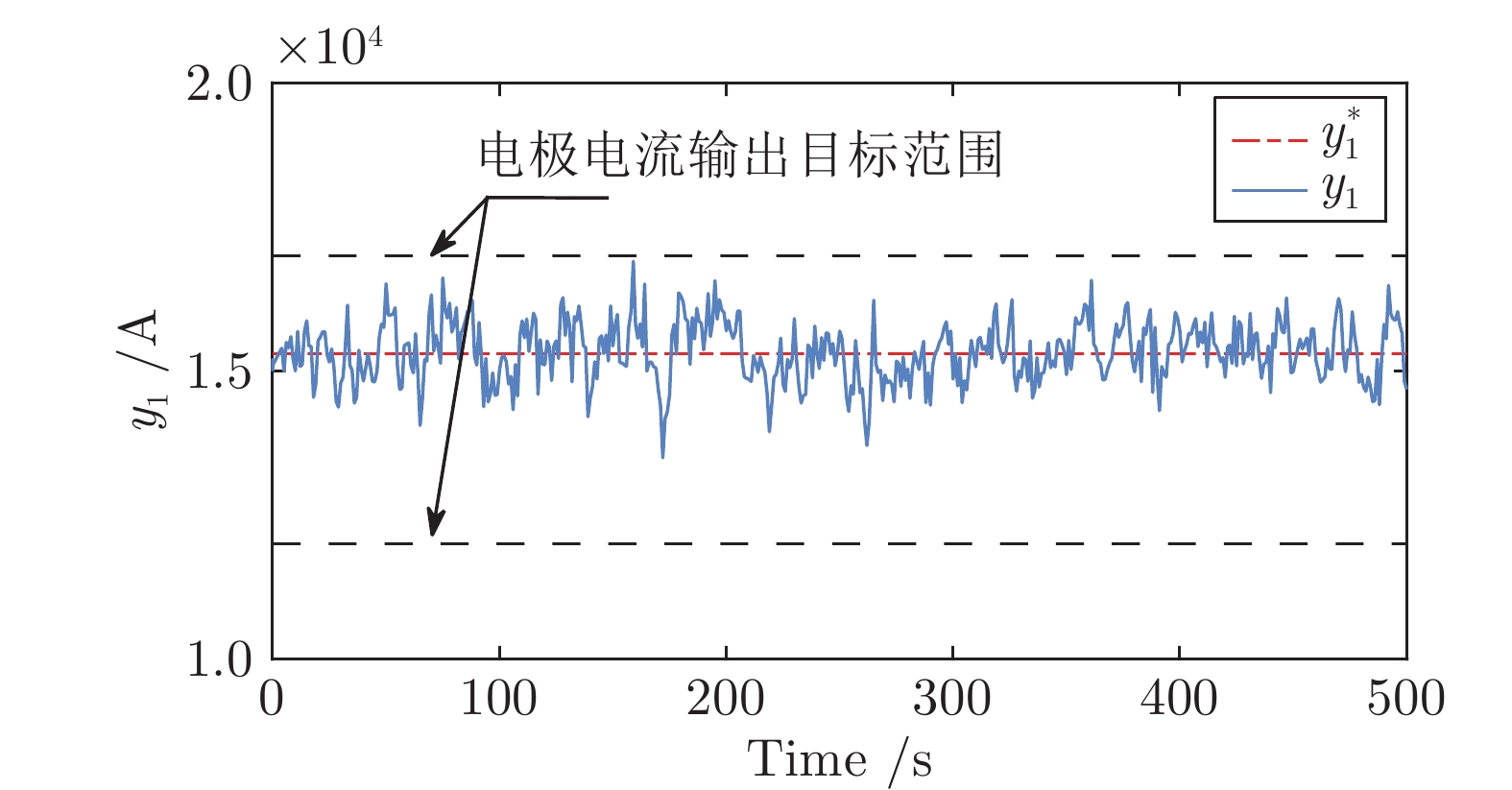
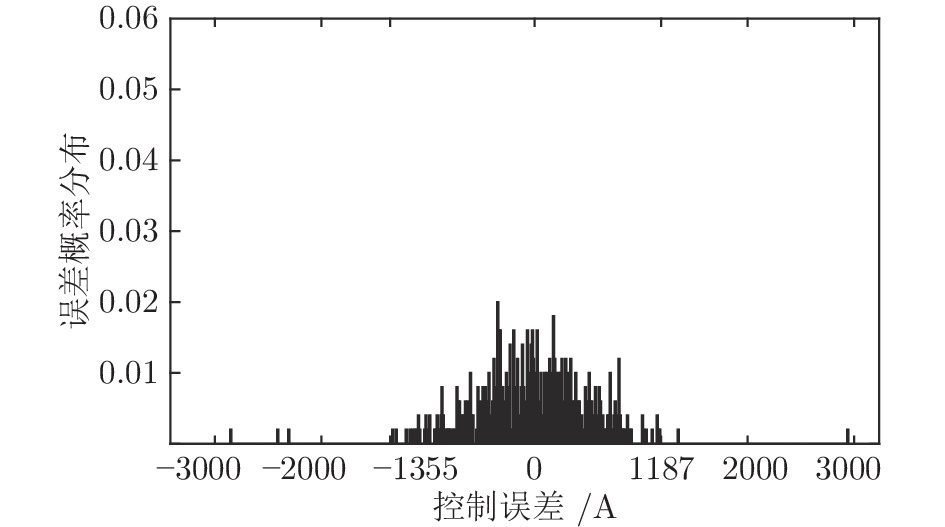
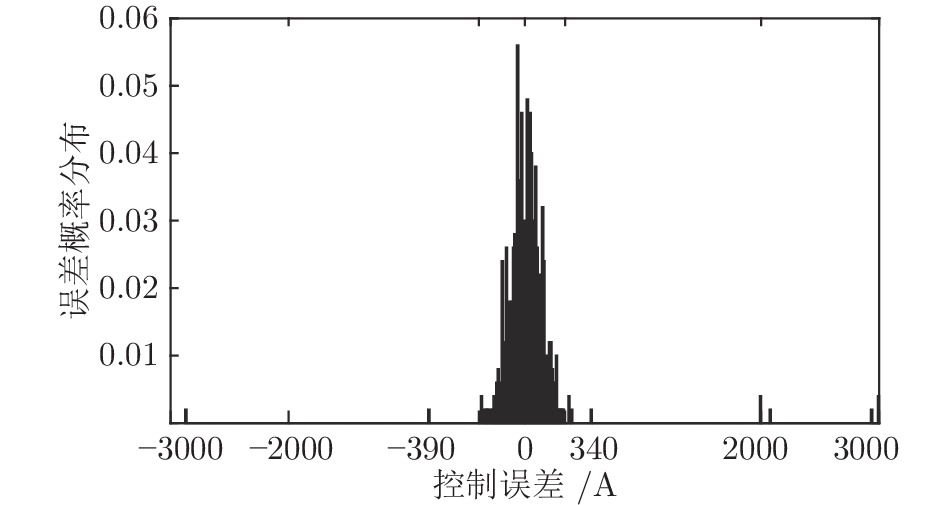
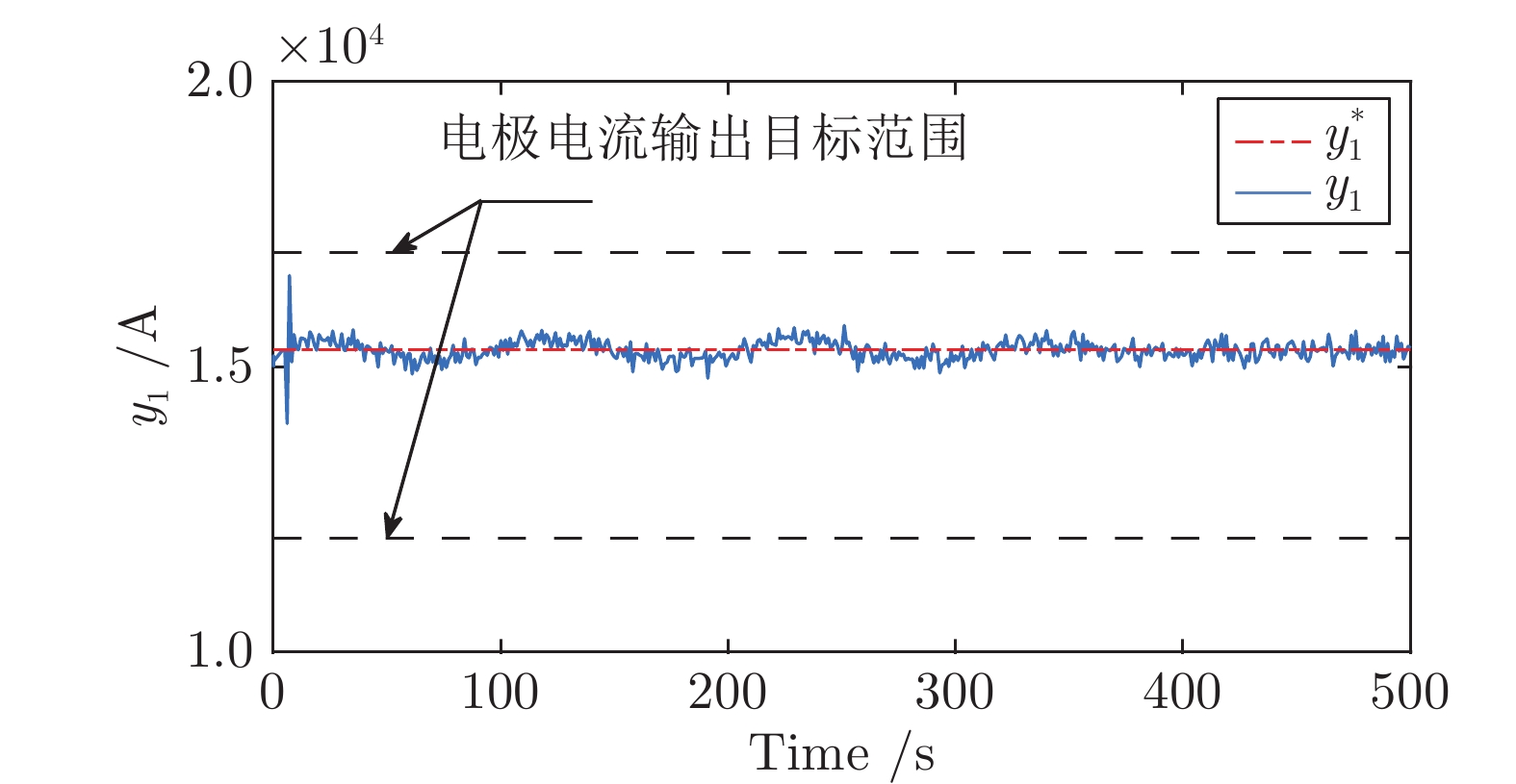
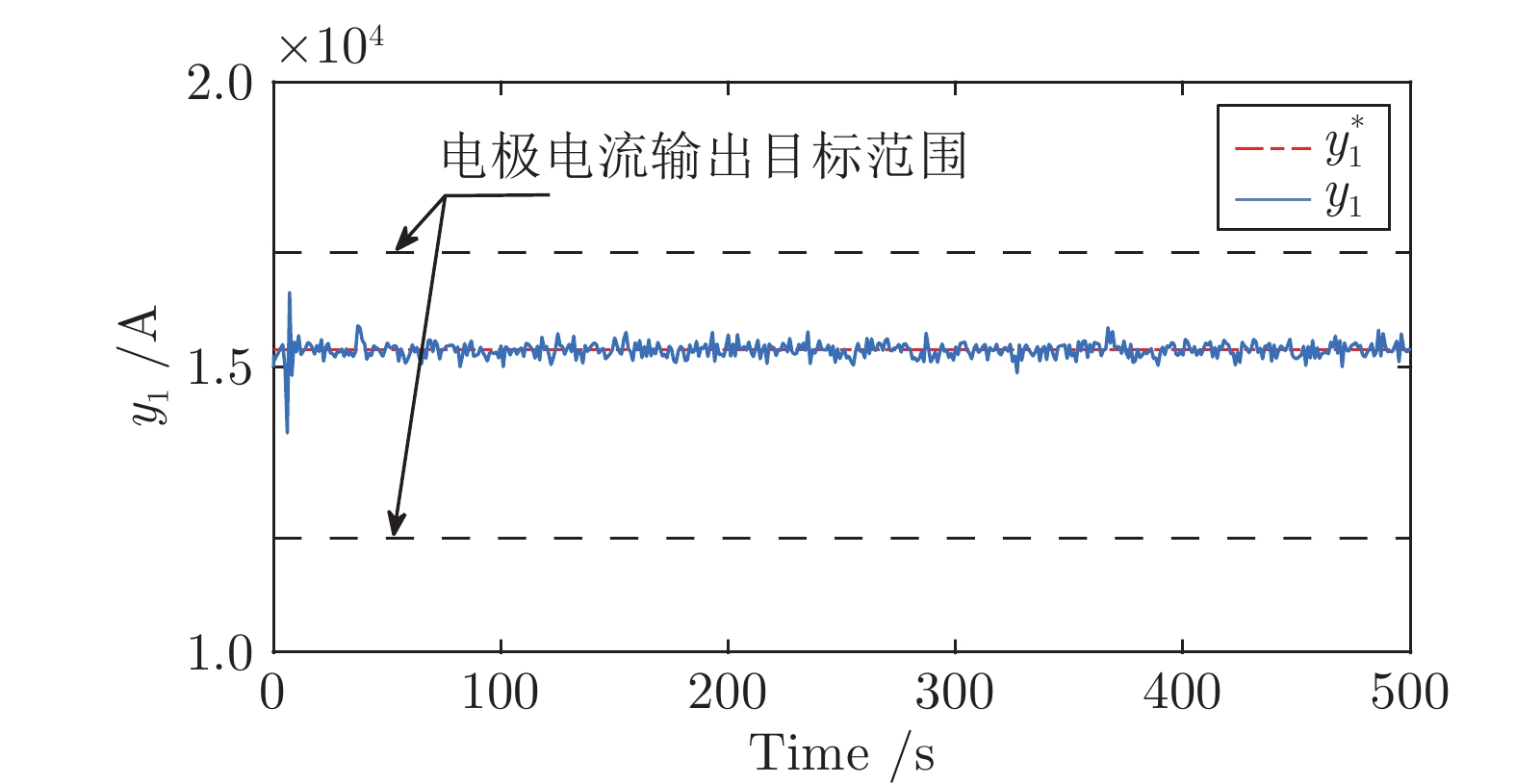
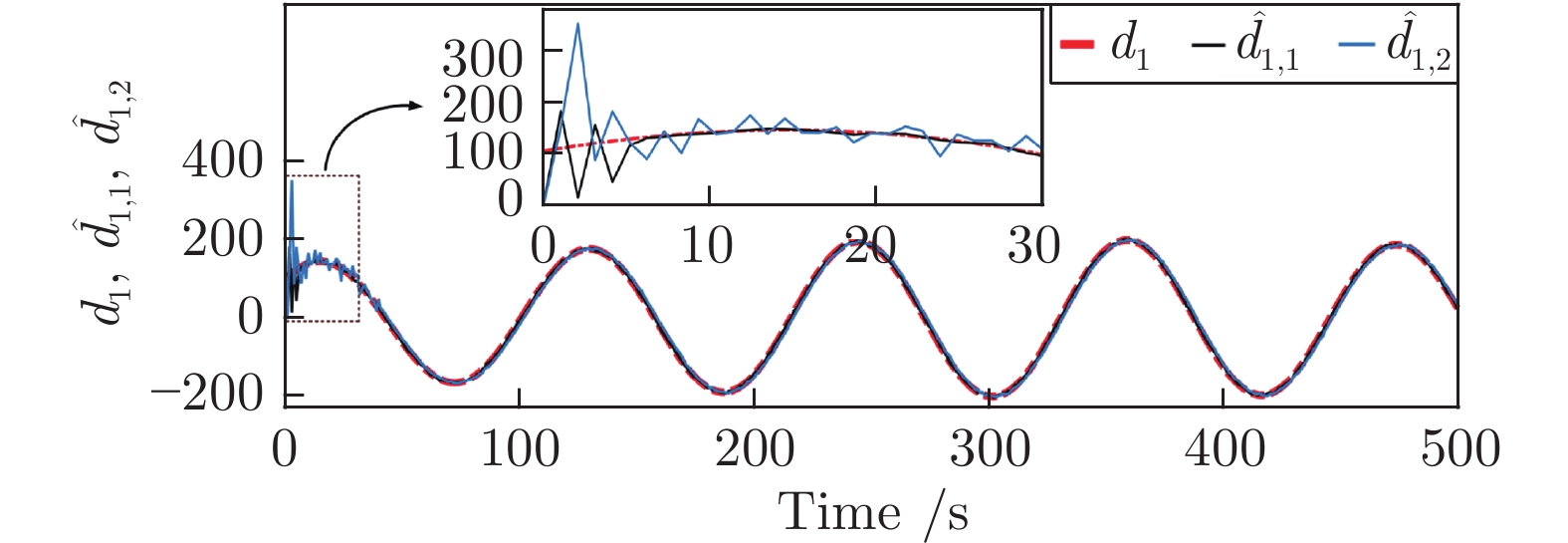
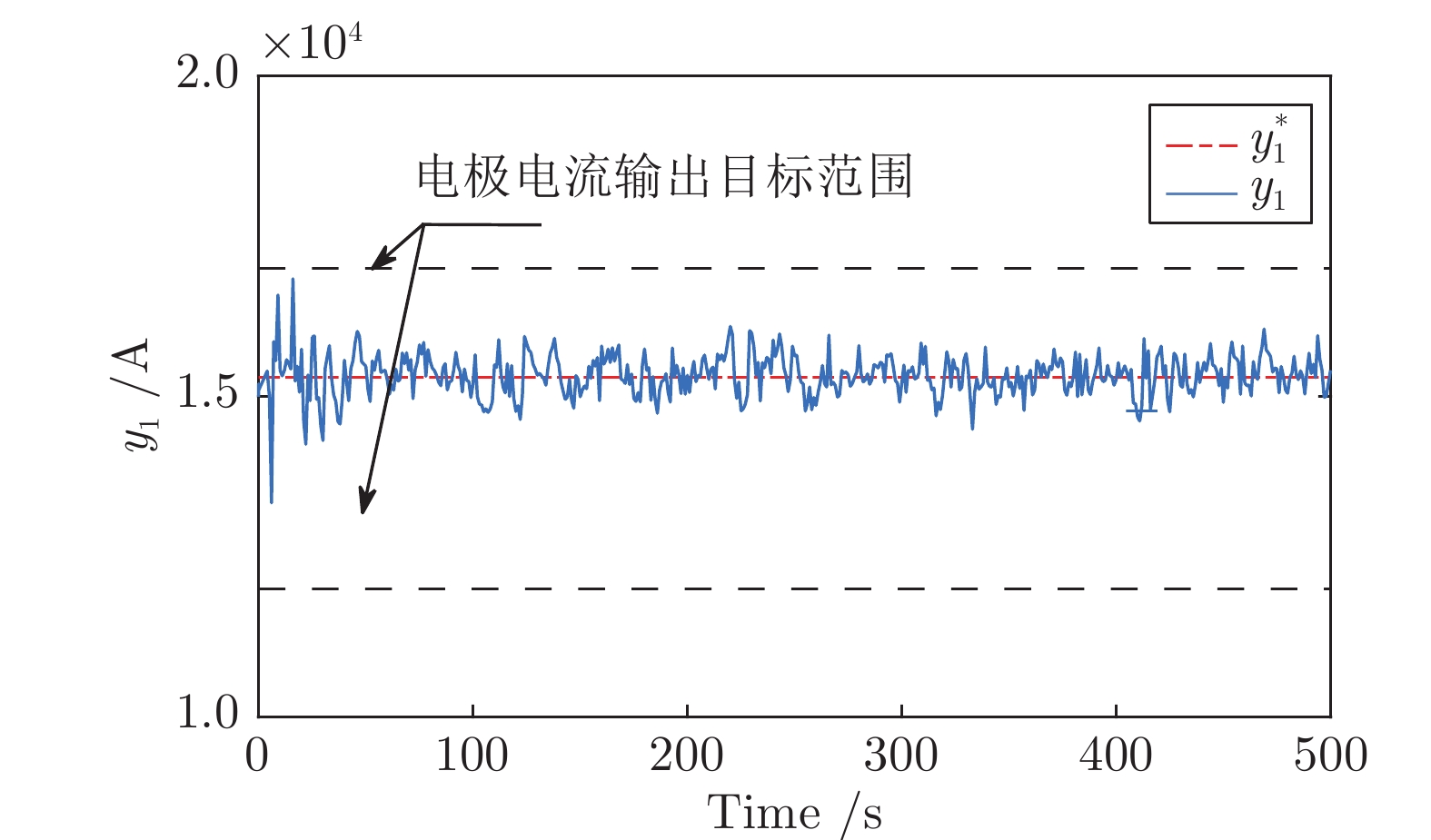
电熔镁砂熔炼过程通过电极电流熔化物料, 采用埋弧方式, 边熔化边加料, 其被控对象是以转动方向与频率为输入, 以电极电流为输出的三相电机. 本文通过引入中间变量并转化控制目标, 将电熔镁砂熔炼过程三相电极电流的复杂非线性控制问题简化为线性控制问题, 提出了一种简化的电极电流饱和约束一步最优控制方法, 并通过引入拉格朗日乘子向量和松弛向量验证了该方法的最优性. 理论分析和仿真对比实验结果表明本文所提简化控制方法的有效性和优越性. 此外, 当考虑电熔镁砂熔炼过程中存在的不可测外部干扰时, 在上述简化的电极电流饱和约束算法的基础上设计了高阶干扰观测器, 理论分析和仿真结果验证了具有高阶干扰观测器的简化算法的优越性.



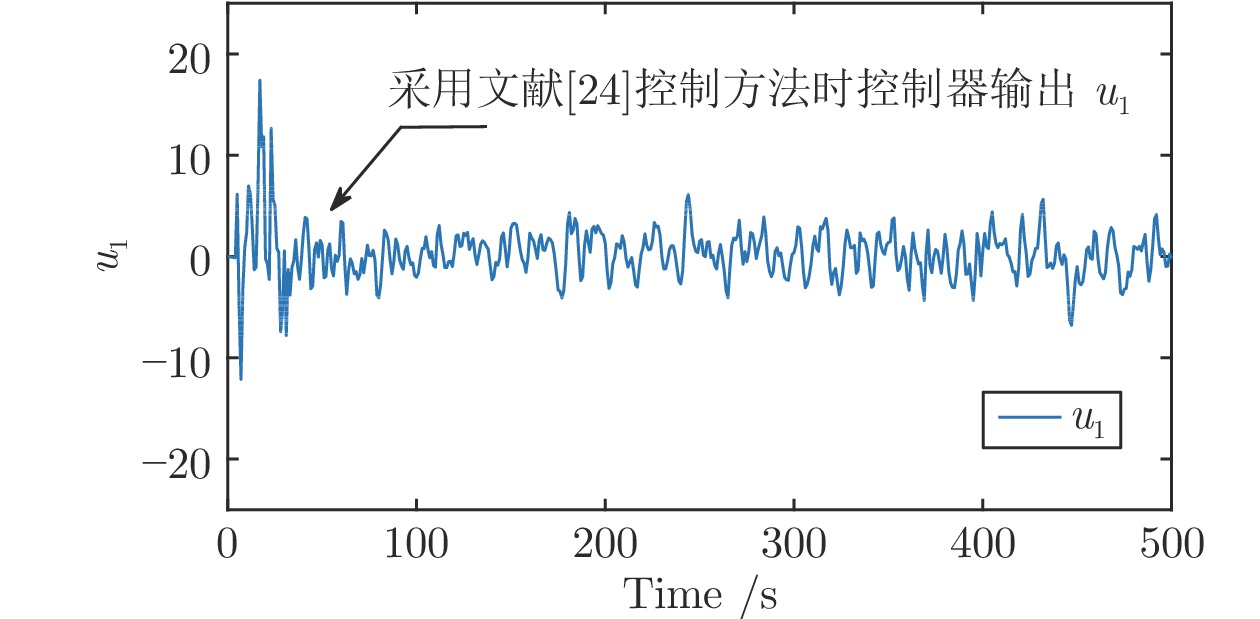
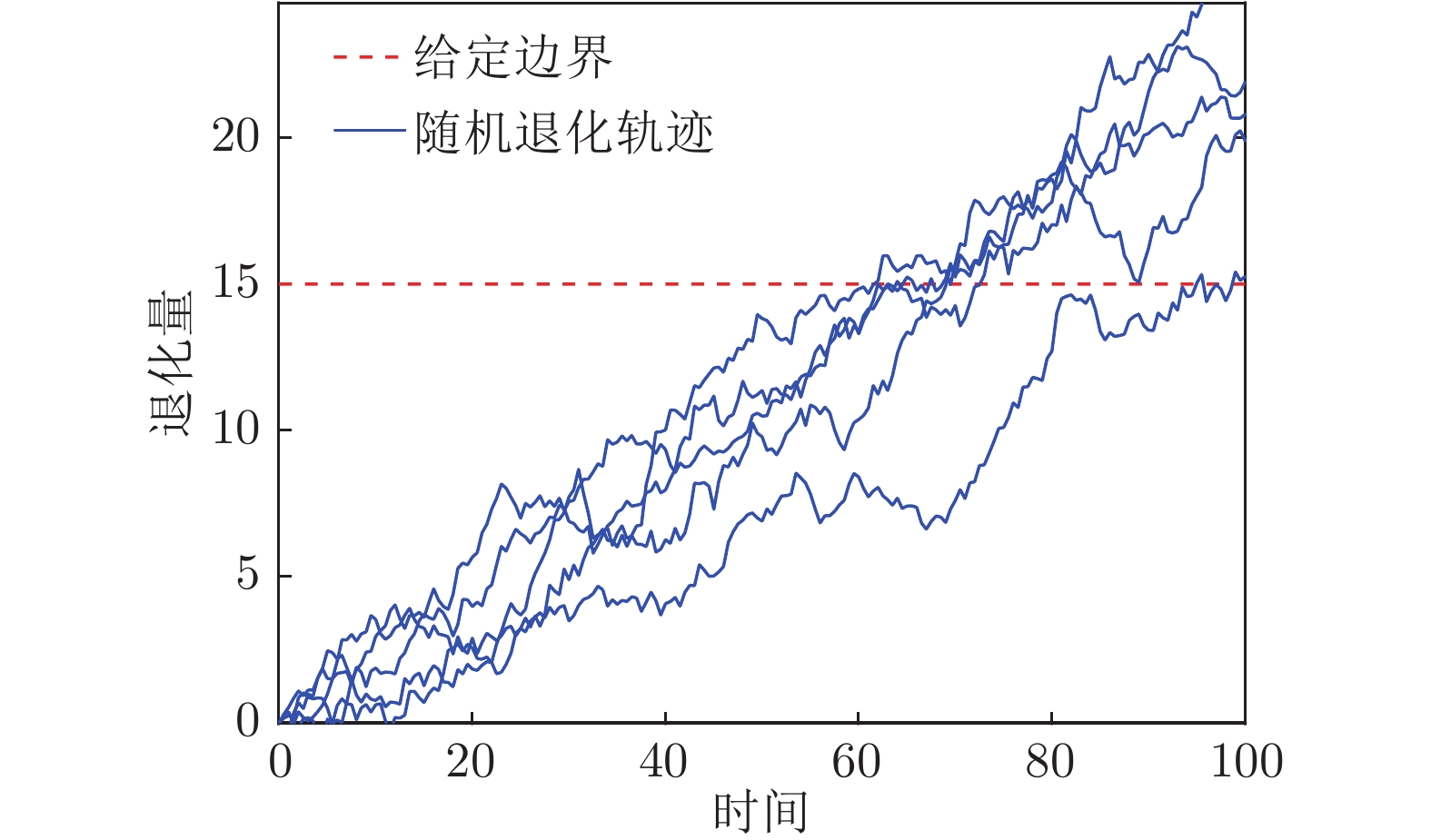
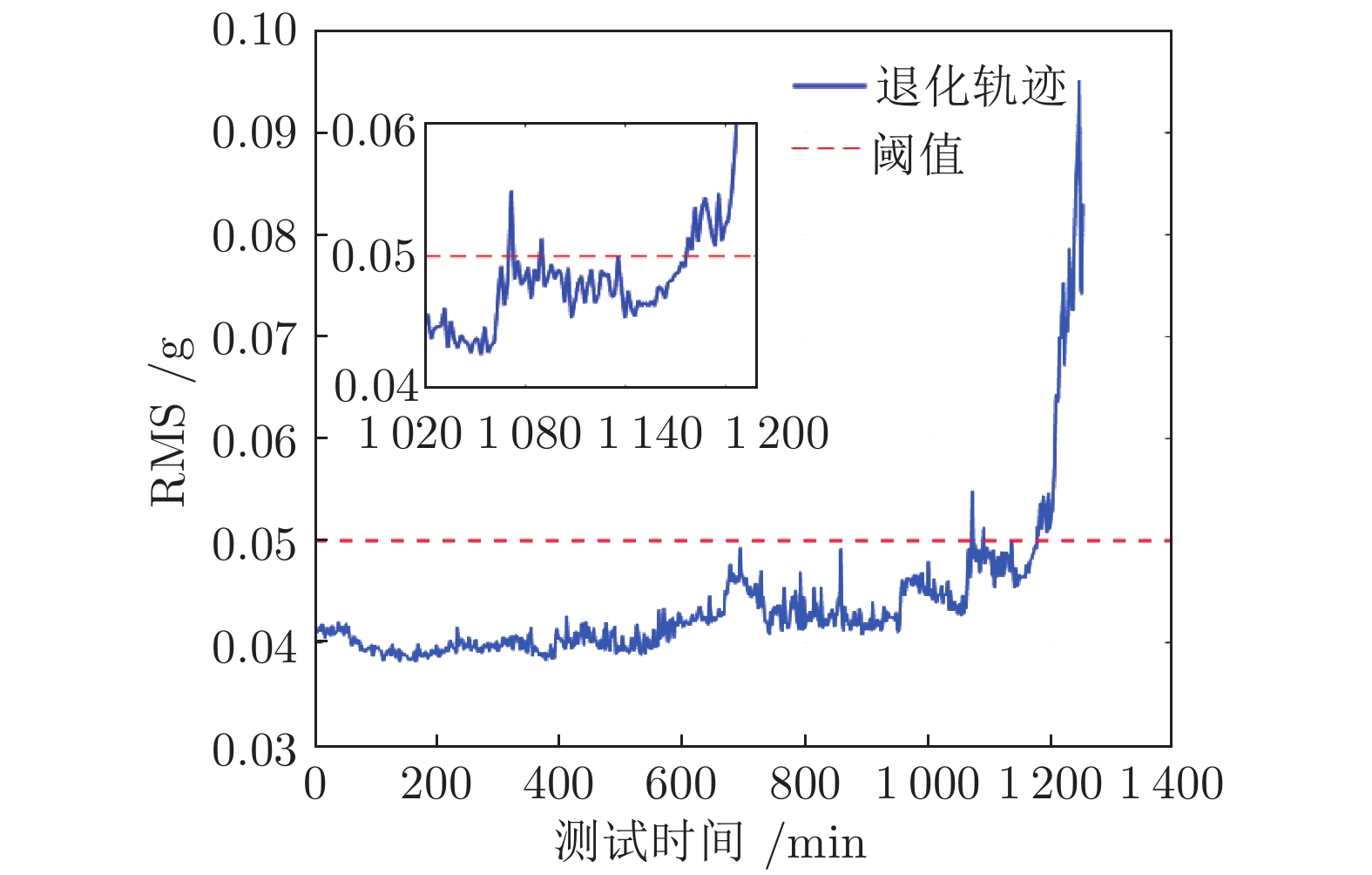
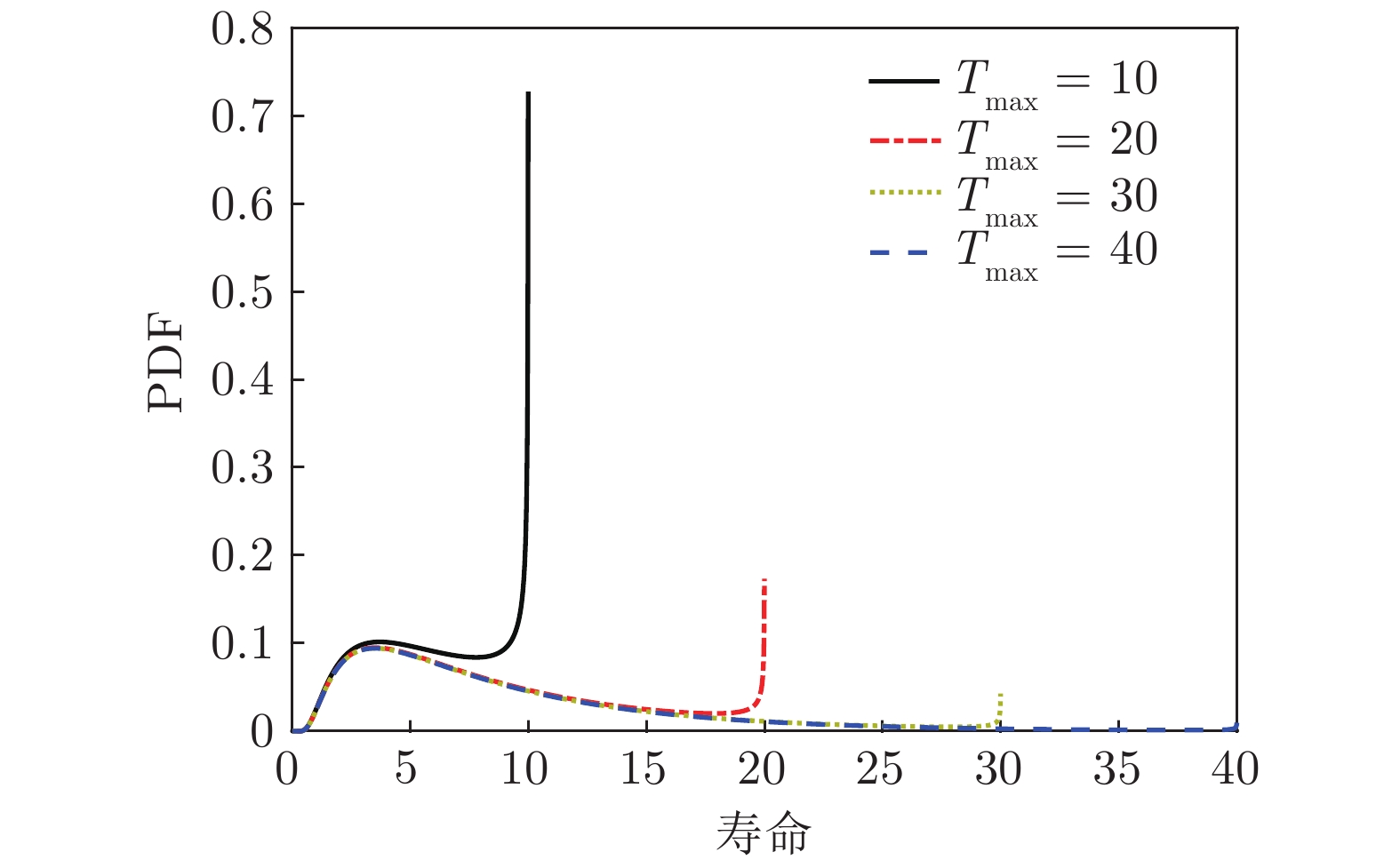
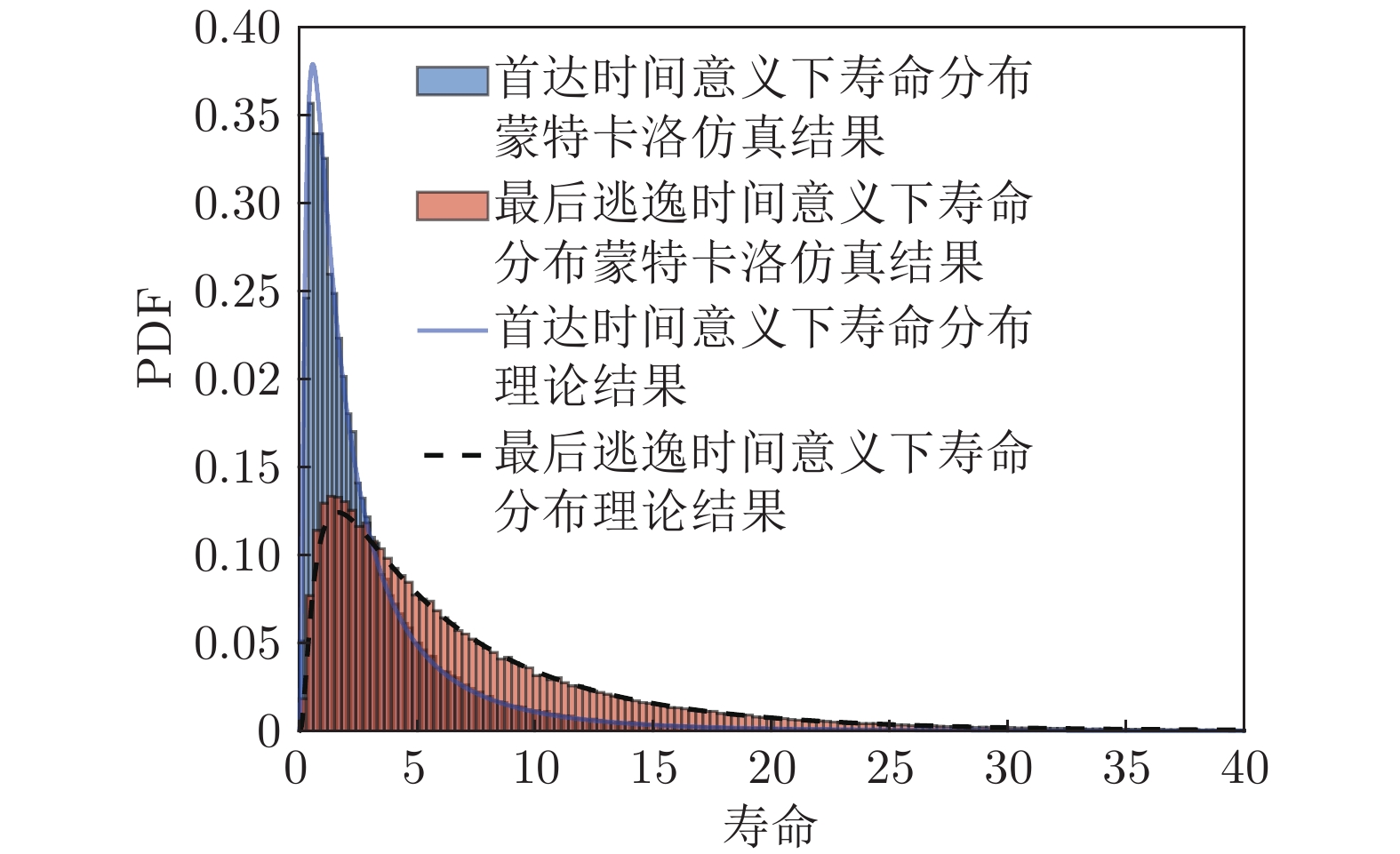
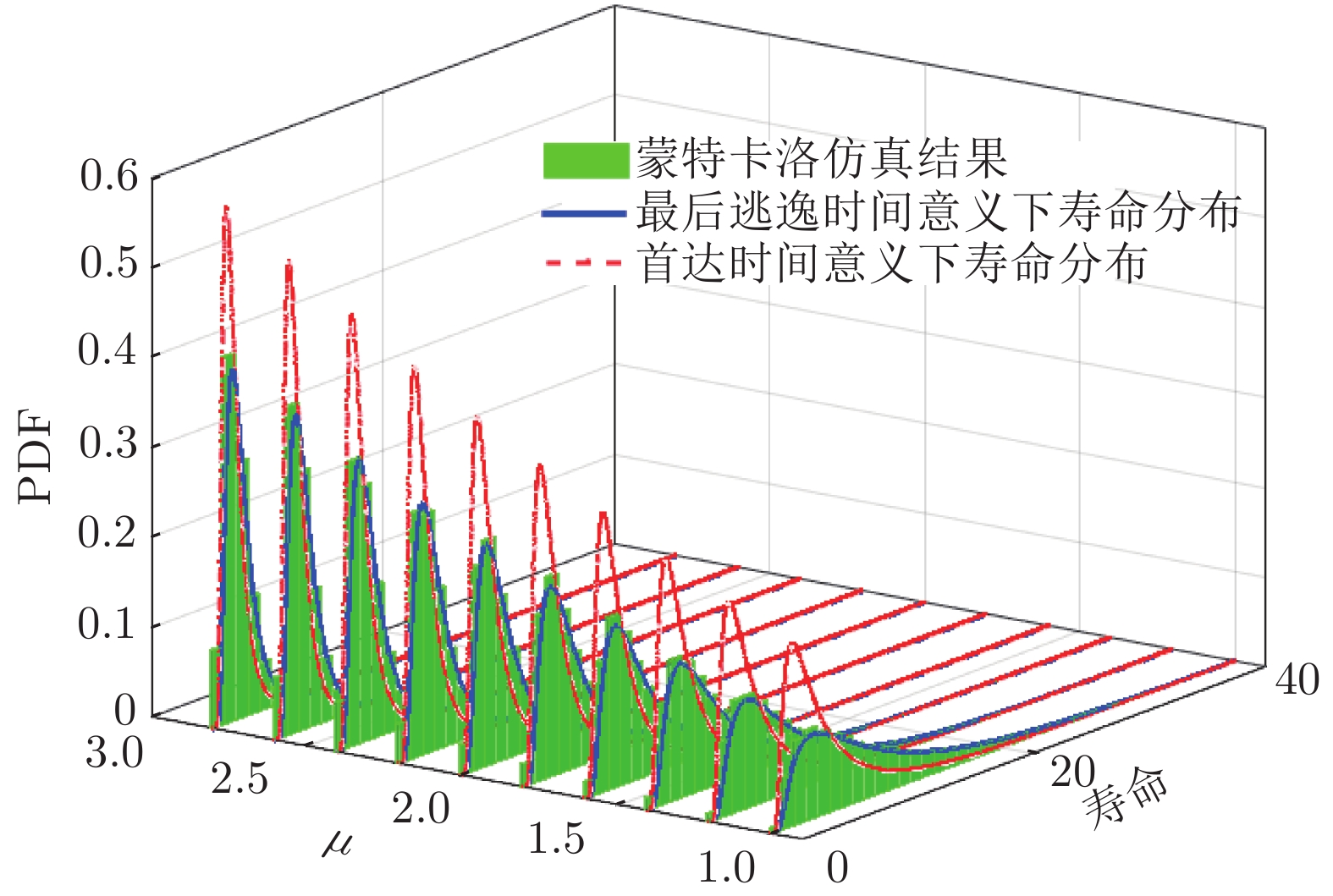
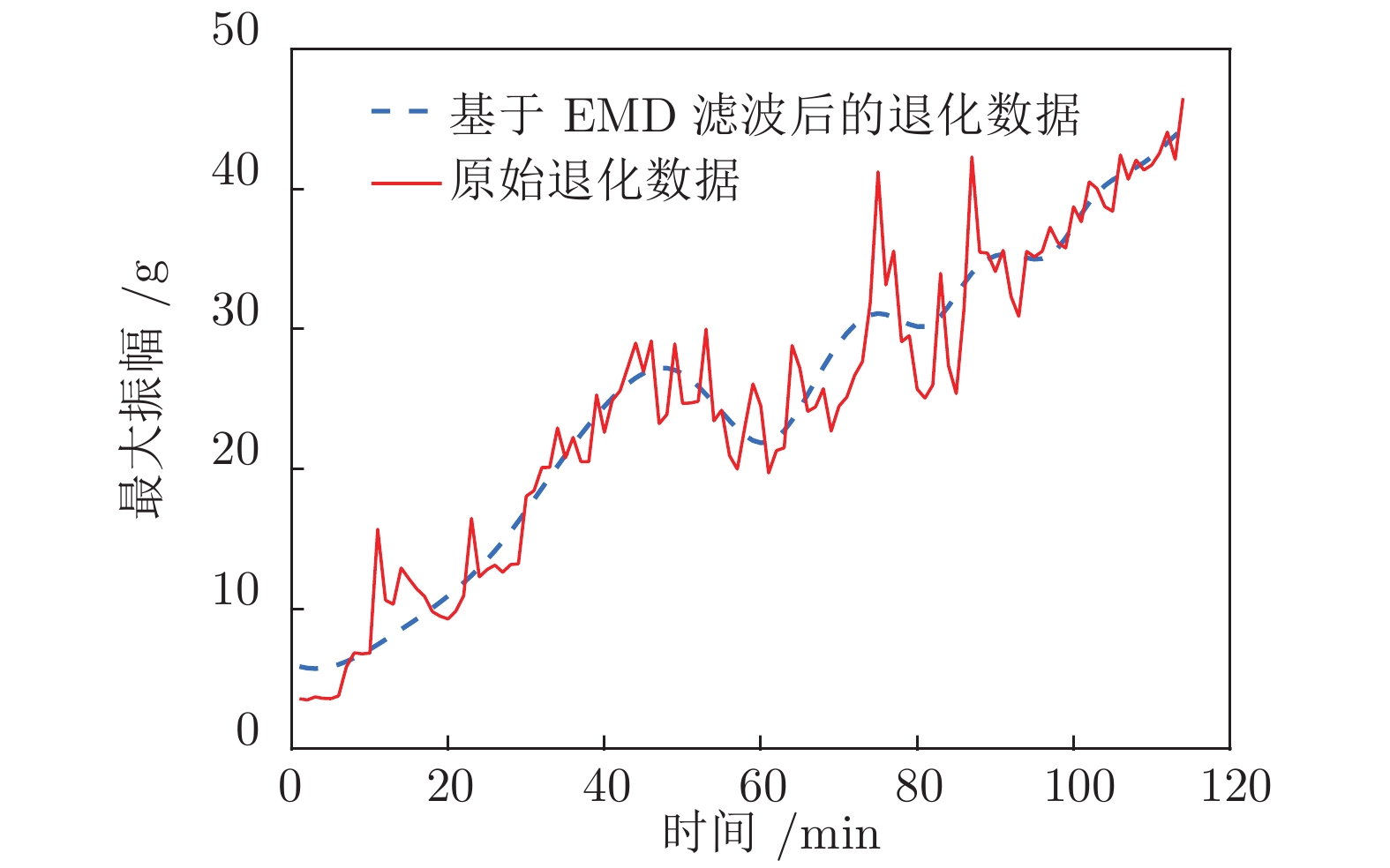
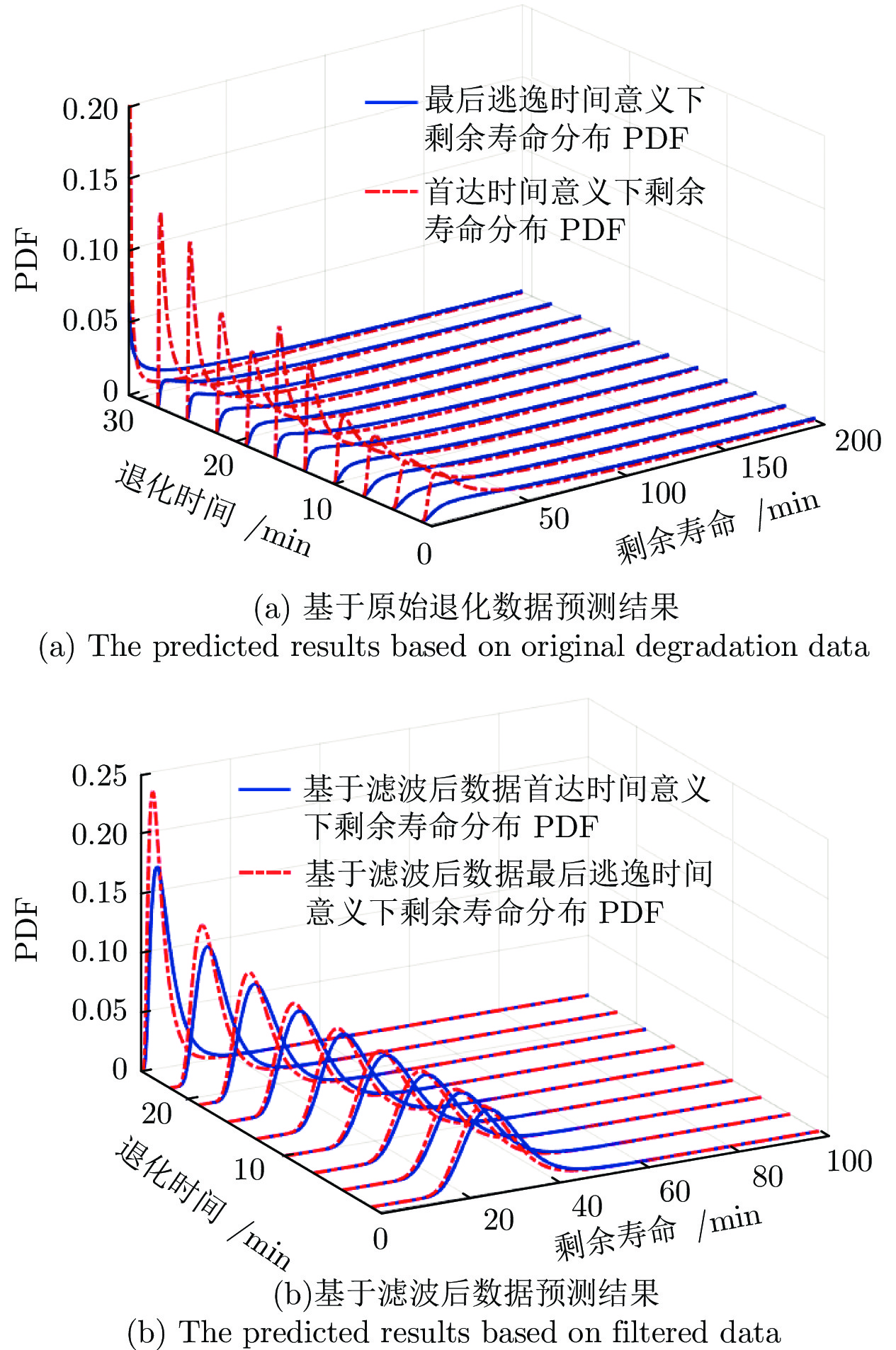
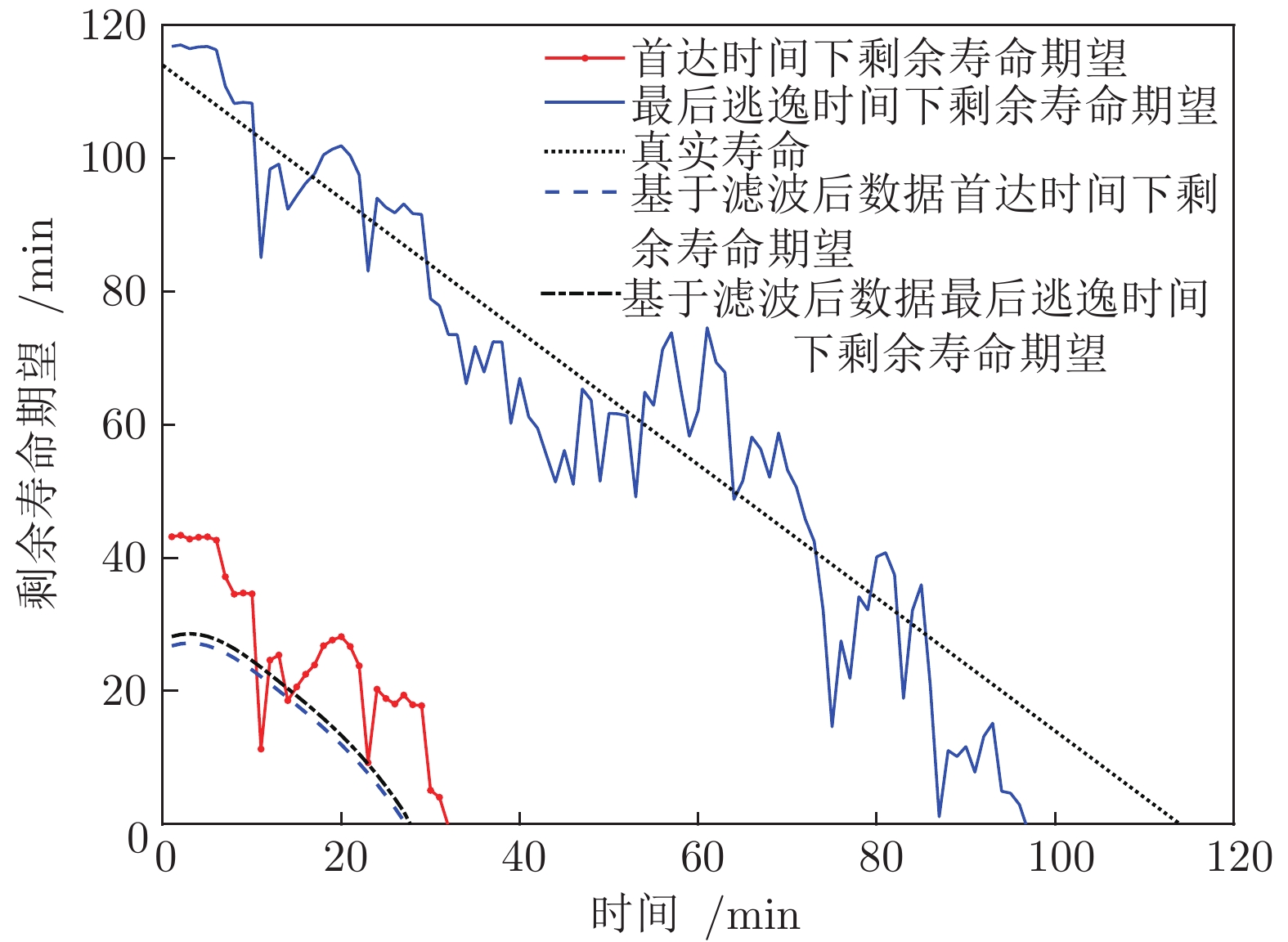
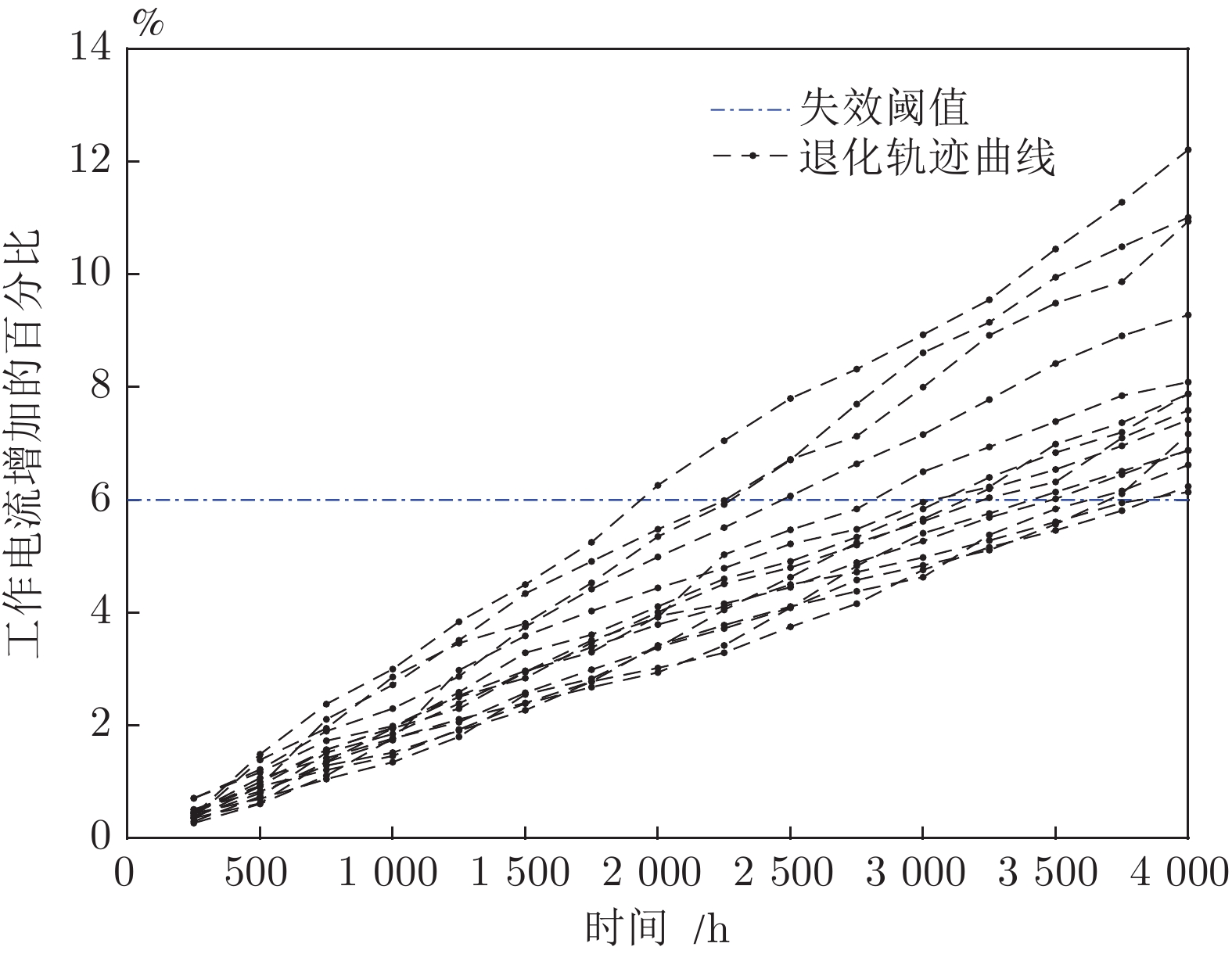
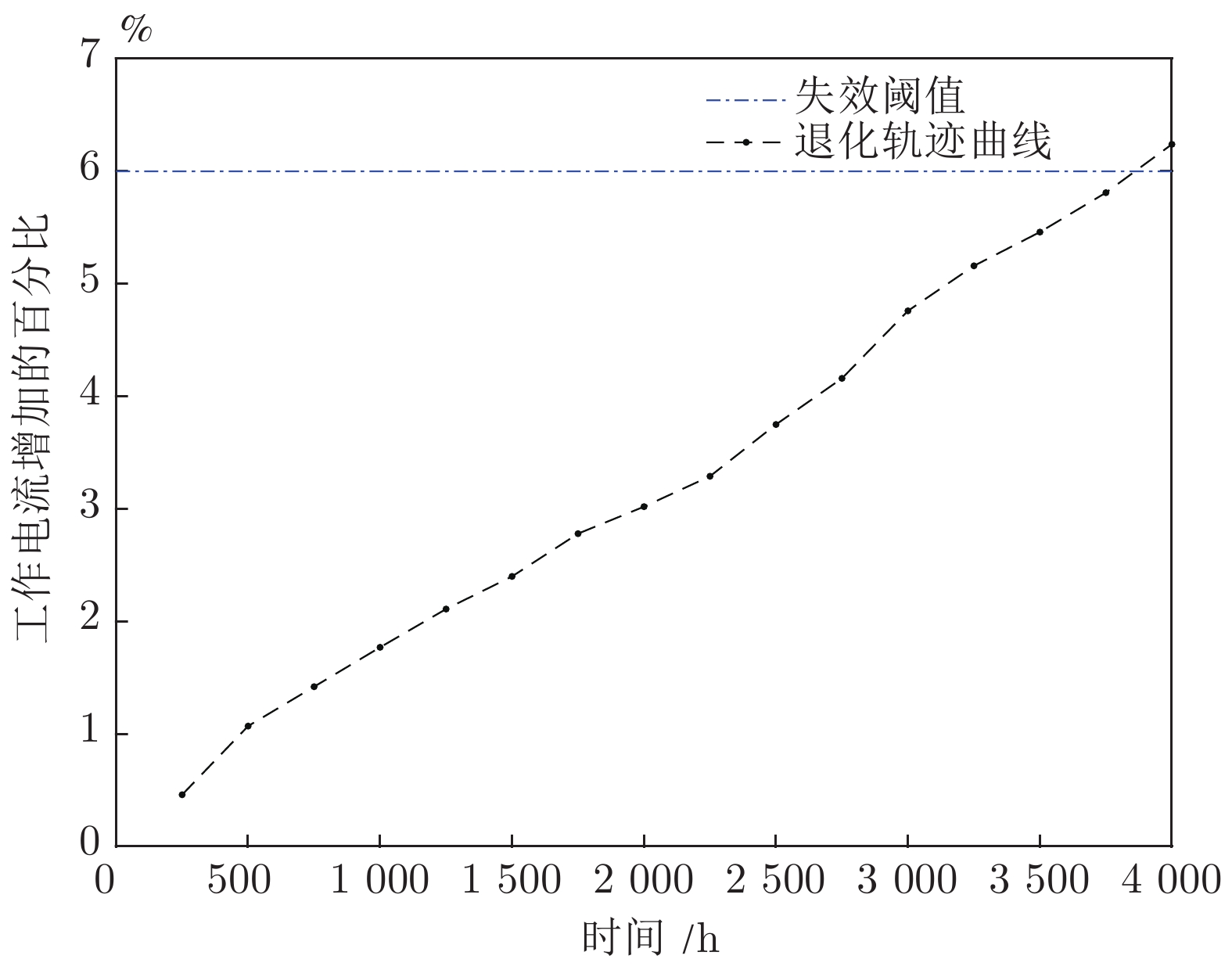
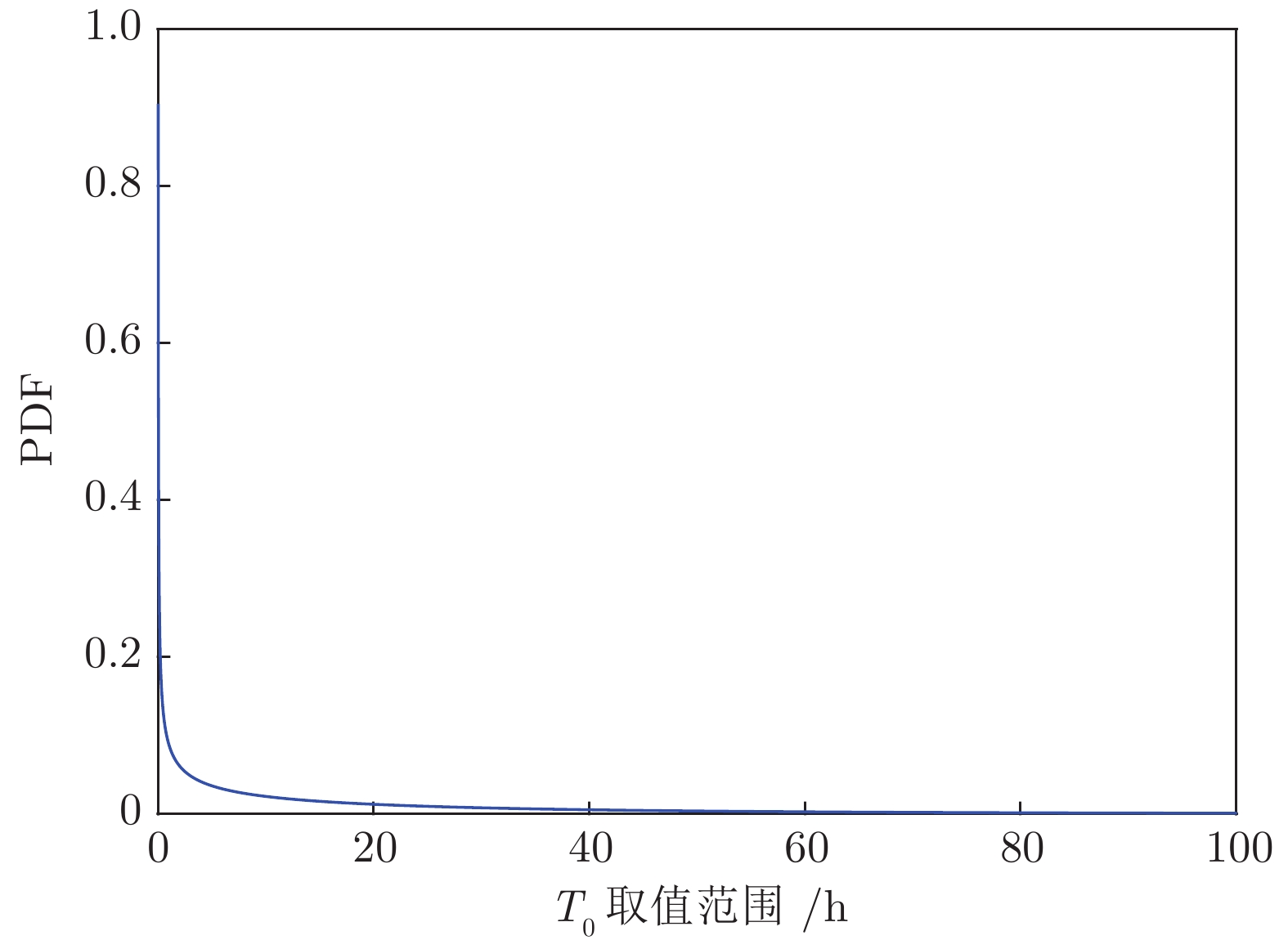
现有基于随机退化过程建模的寿命预测研究中, 通常用退化过程的首达时间(First passage time, FPT)来定义寿命. 但是, 这种寿命定义较为保守, 可能会导致其明显小于设备实际寿命. 鉴于此, 基于最后逃逸时间(Last exit time, LET)的概念, 给出一种新的寿命与剩余寿命(Remaining useful life, RUL)定义方式. 在该新框架下, 提出一种基于最后逃逸时间的寿命预测方法, 推导得到最后逃逸时间下基于Wiener退化过程模型的寿命与剩余寿命表达形式, 讨论了该方法与传统首达时间下寿命预测方法之间的关系. 此外, 通过数值仿真验证了该方法的正确性, 并对模型参数进行了敏感性分析. 最后, 通过轴承以及激光器的实际退化数据说明了该方法的有效性、可行性以及潜在的工程应用价值.




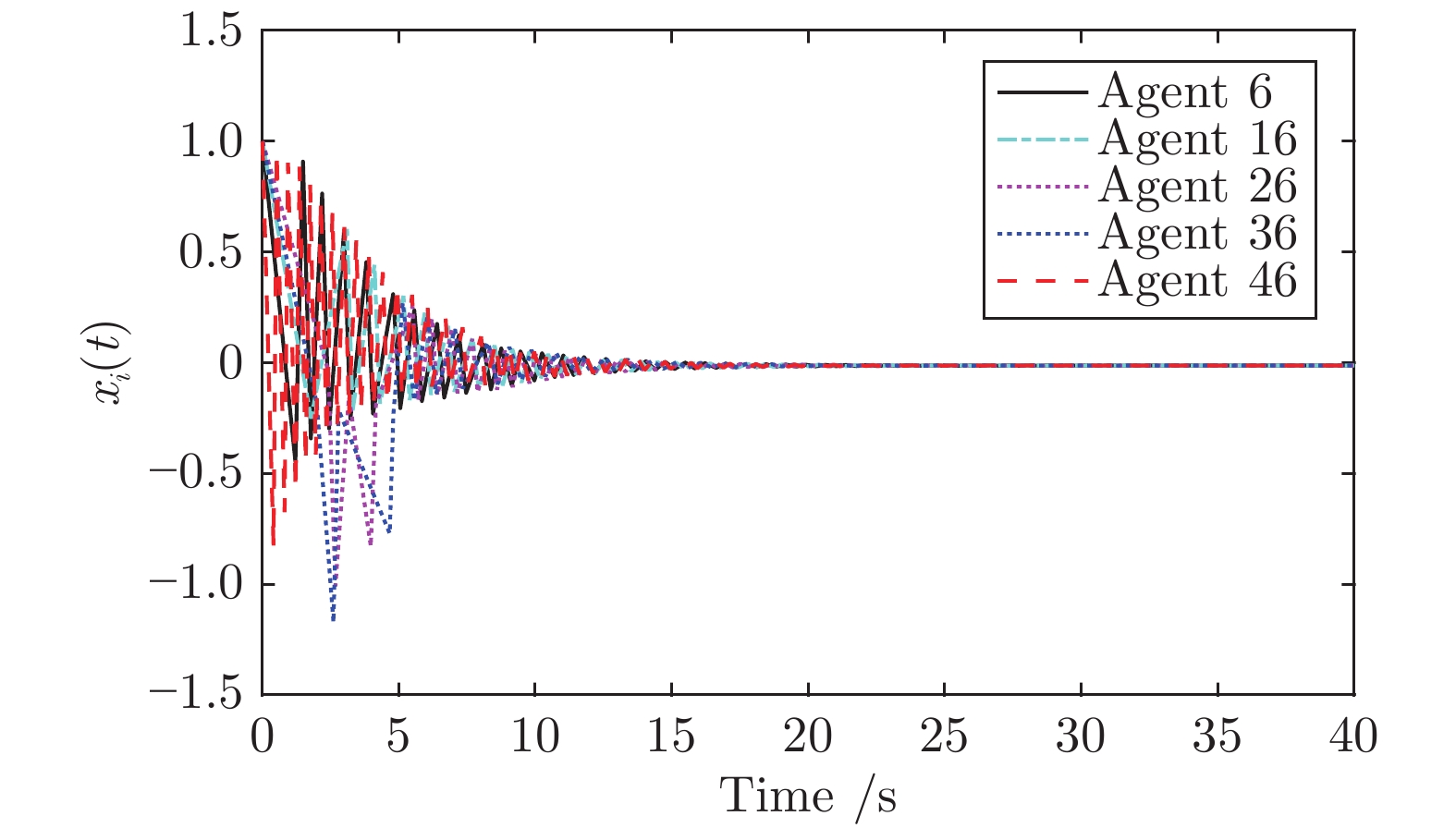
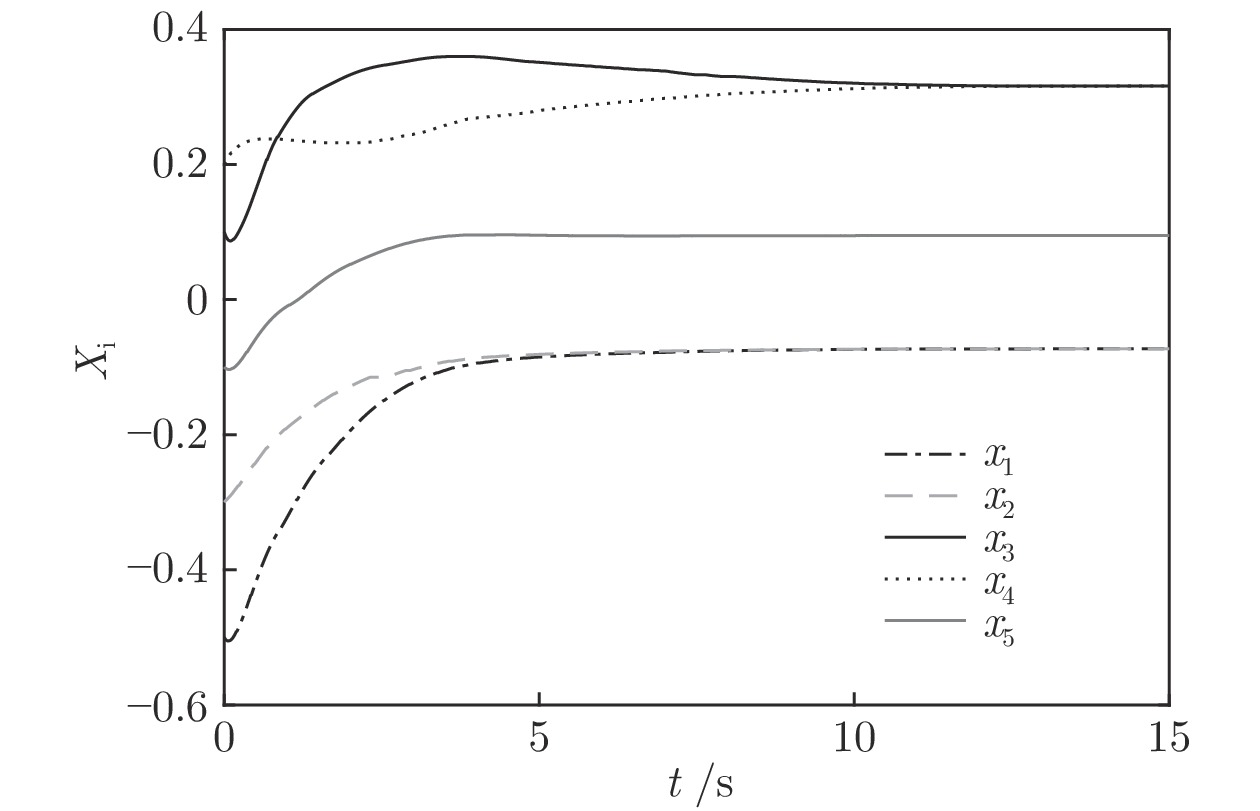
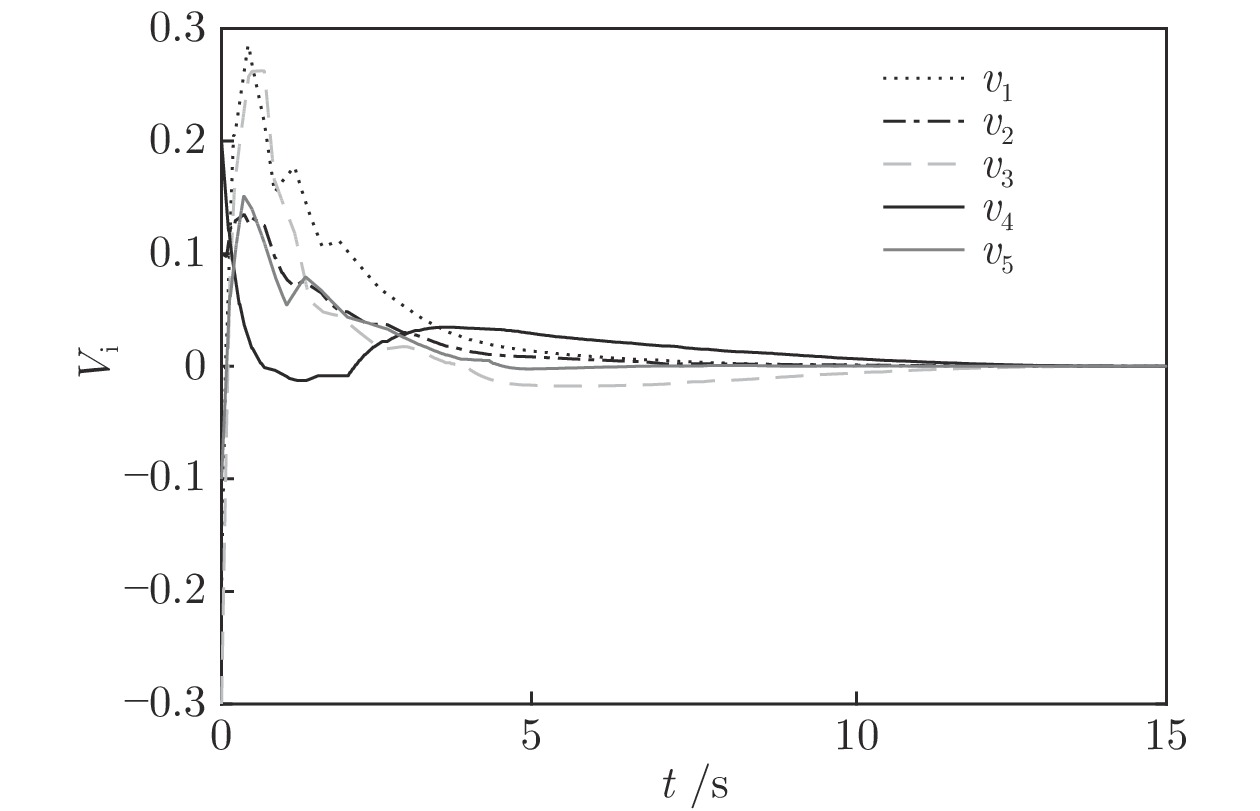
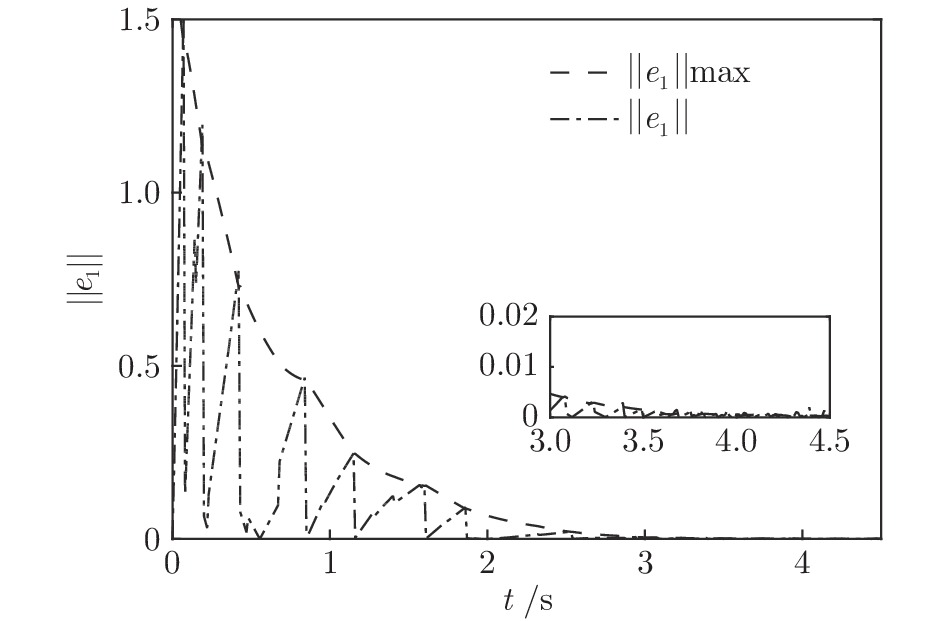
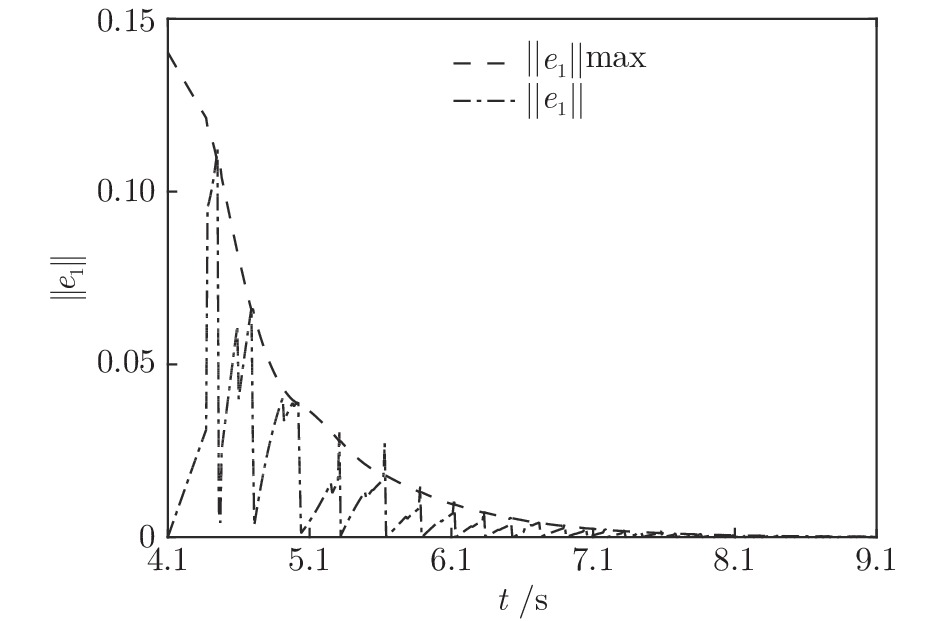
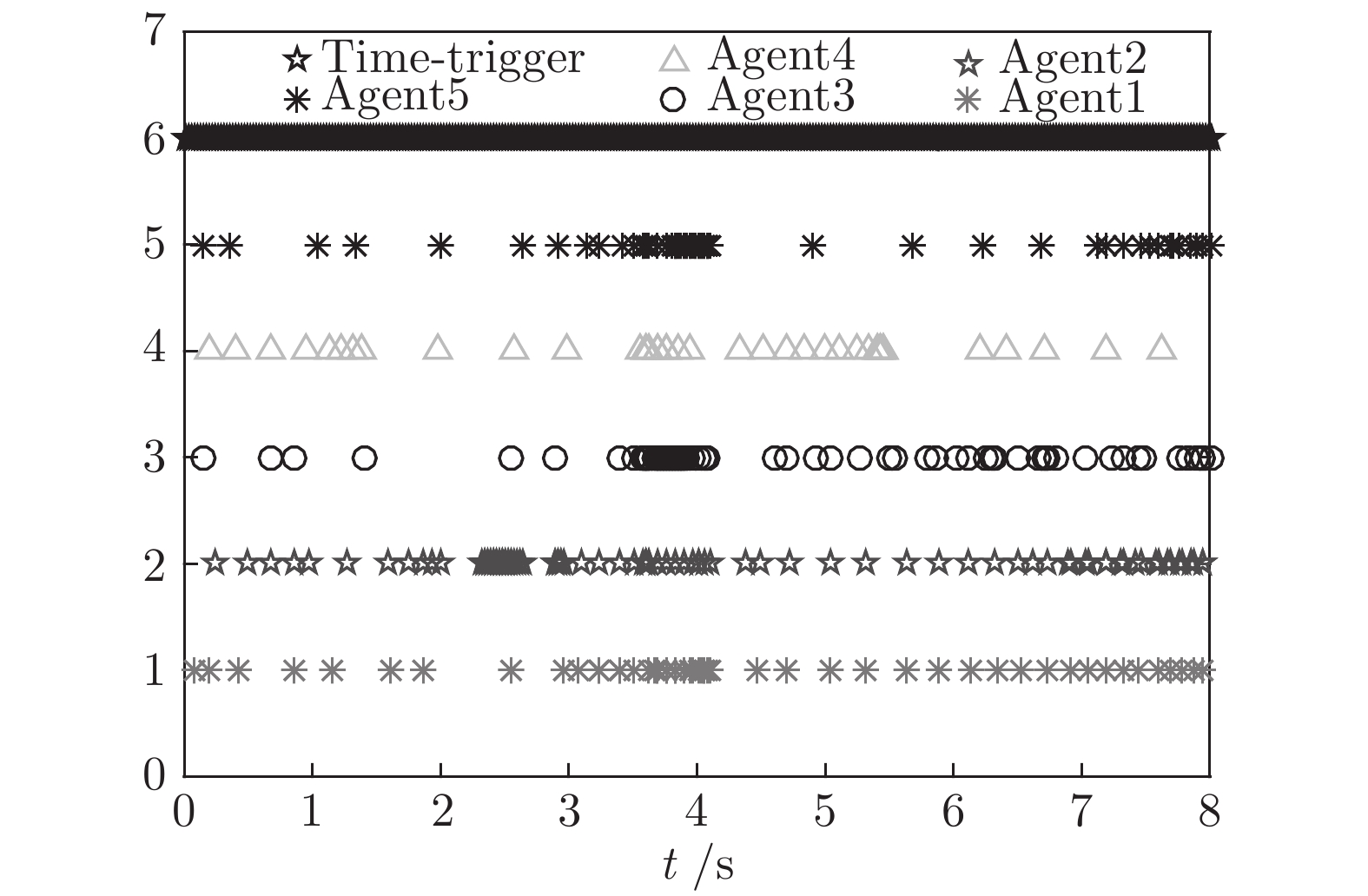
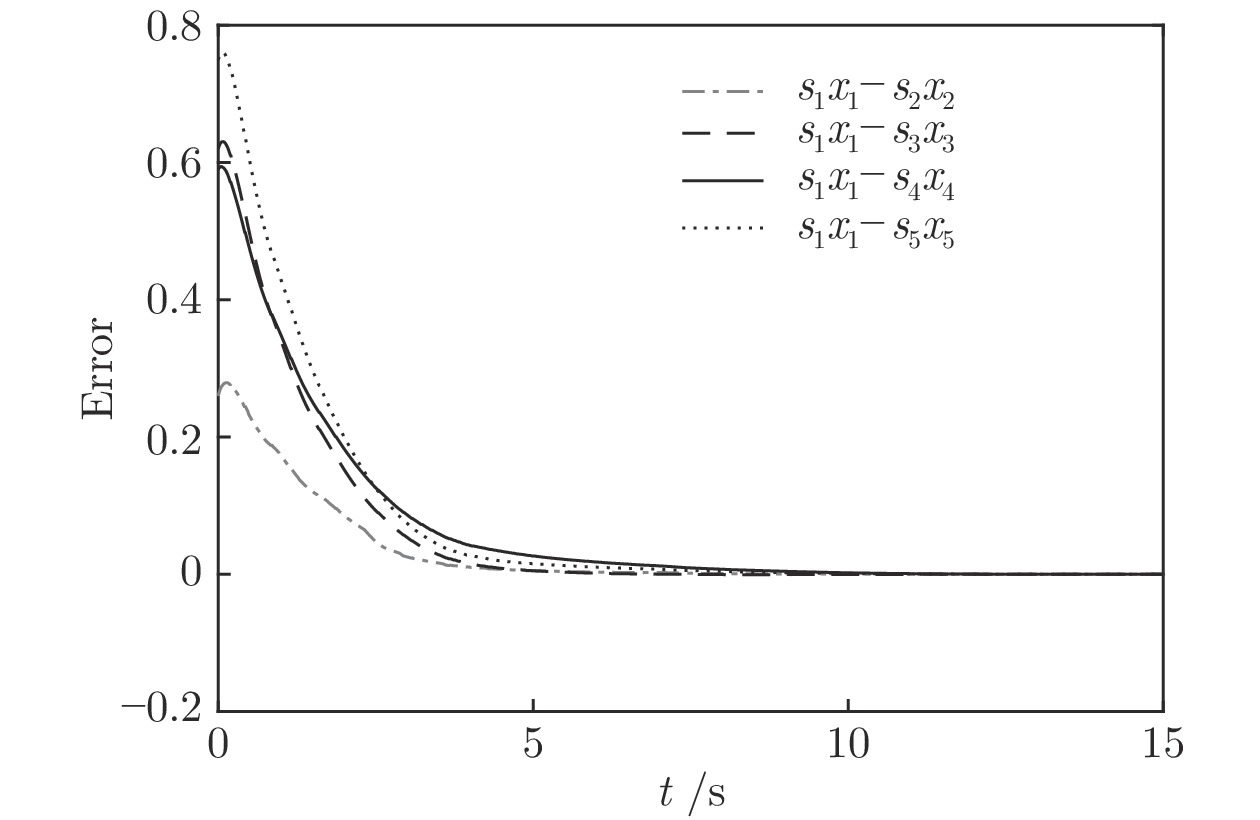
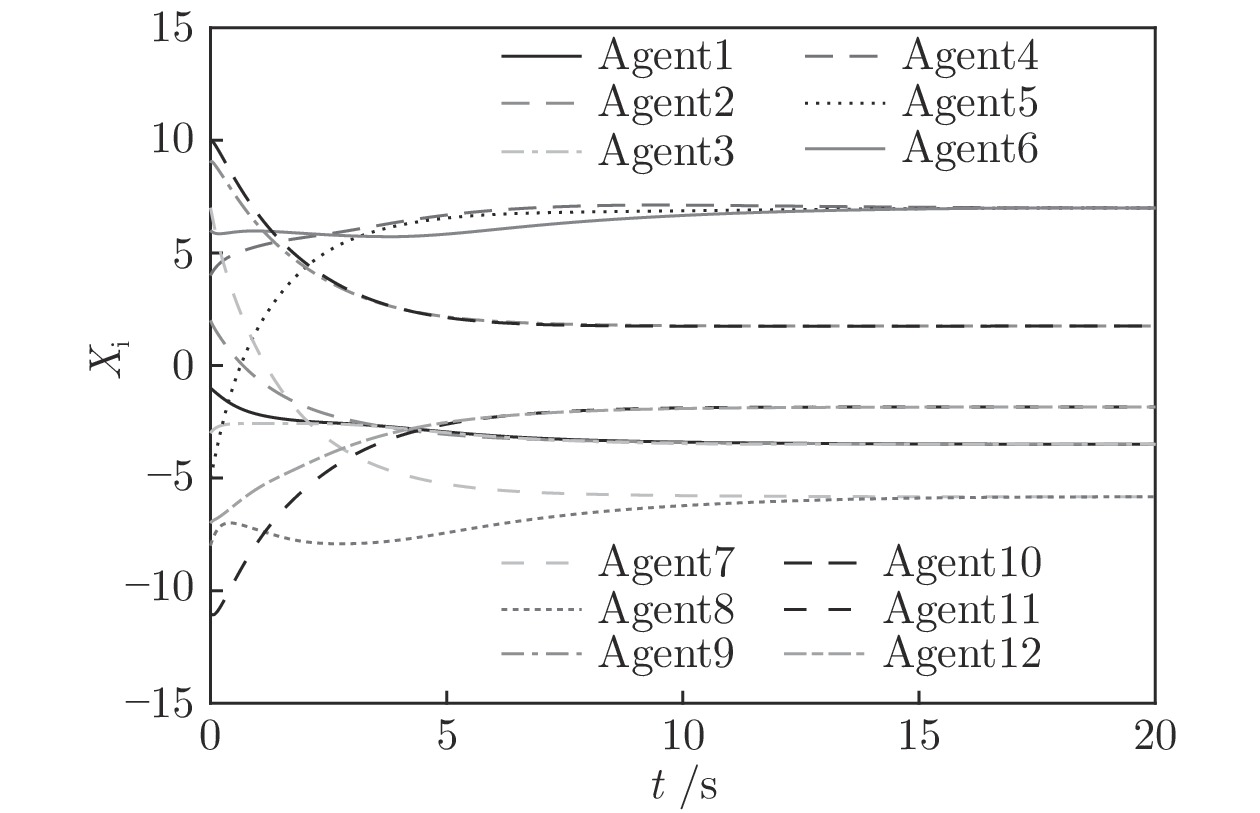
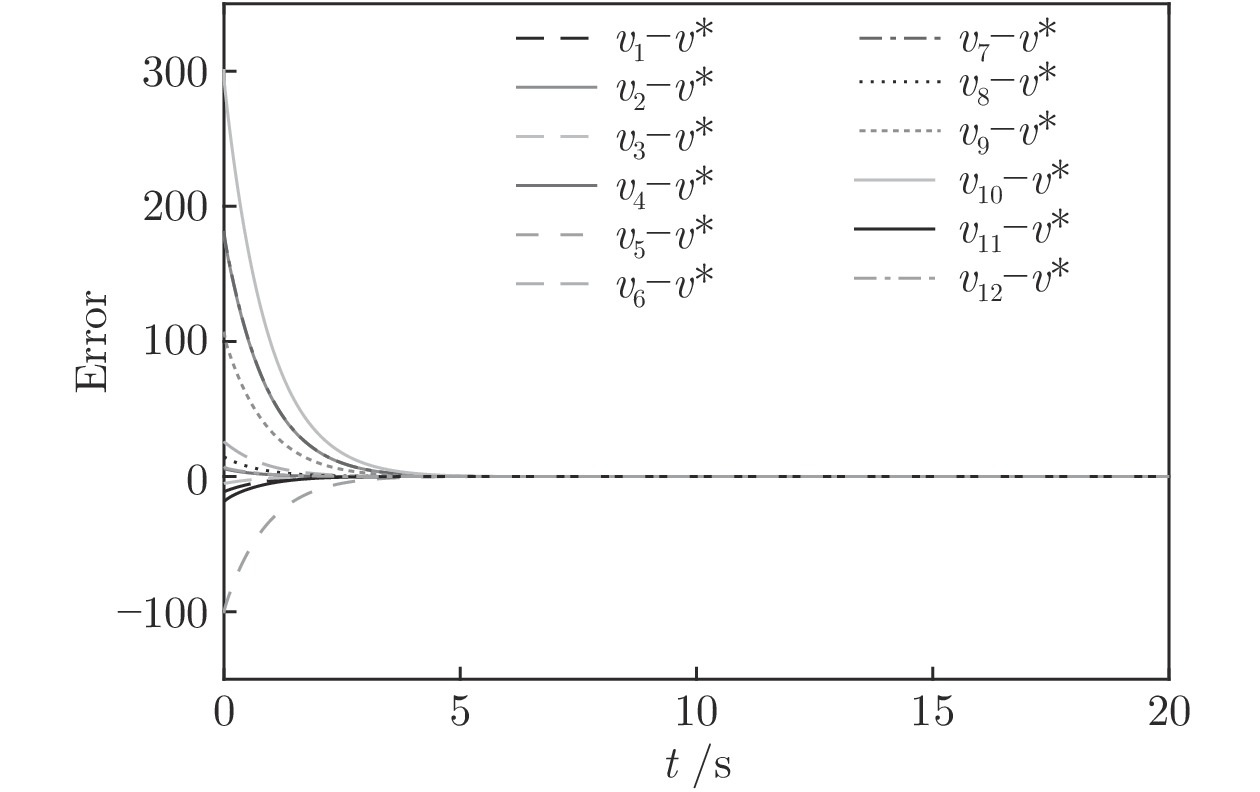
研究了在无向拓扑下, 由多个子群组成的二阶多智能体系统的固定时间比例一致性问题, 采用反推法设计了一种基于事件触发的固定时间非线性比例一致控制策略, 该策略包含分段式事件触发函数: 当智能体在追踪虚拟速度时, 给出了基于速度信息的触发条件; 当智能体速度与虚拟速度达到一致时, 切换至基于位置信息的触发条件, 可有效减少系统能量耗散及控制器更新频次. 通过在位置和速度状态上设置比例参数, 在固定时间内可实现不同子群智能体之间的比例一致. 利用代数图论、线性矩阵不等式以及Lyapunov稳定性理论, 证明在该控制策略下, 二阶多智能体系统能实现固定时间比例一致性, 且不存在Zeno行为. 最后, 仿真实例进一步验证了理论结果的有效性.




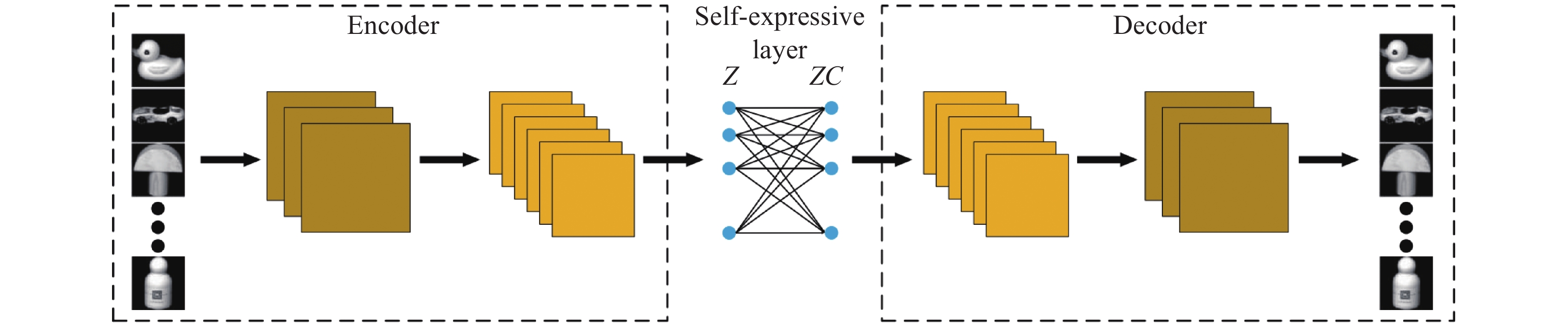
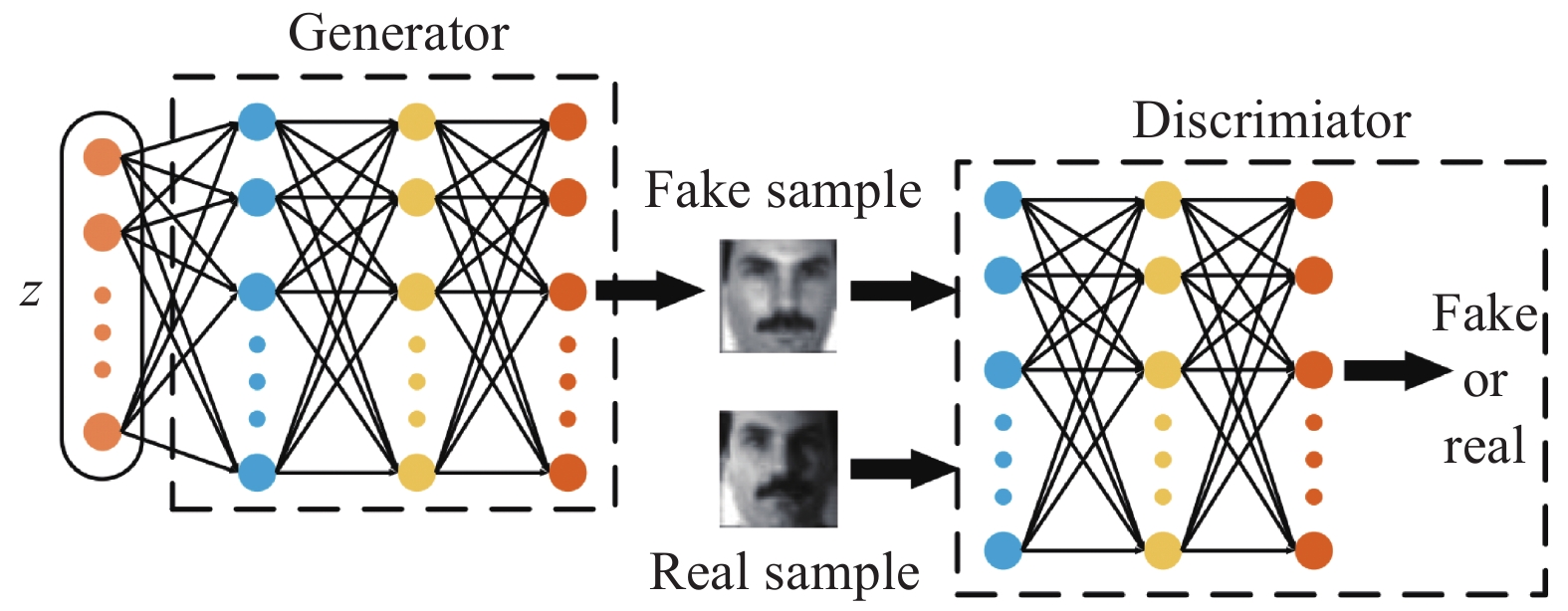
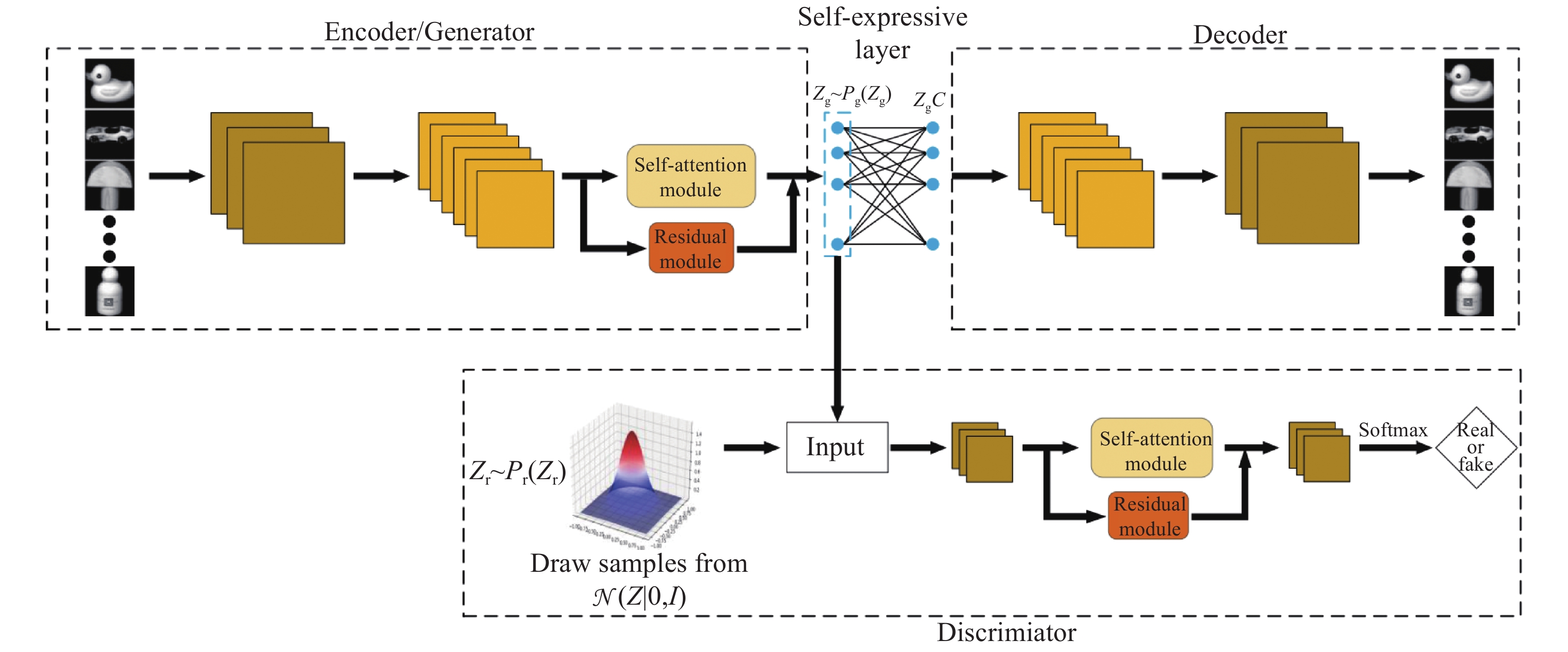
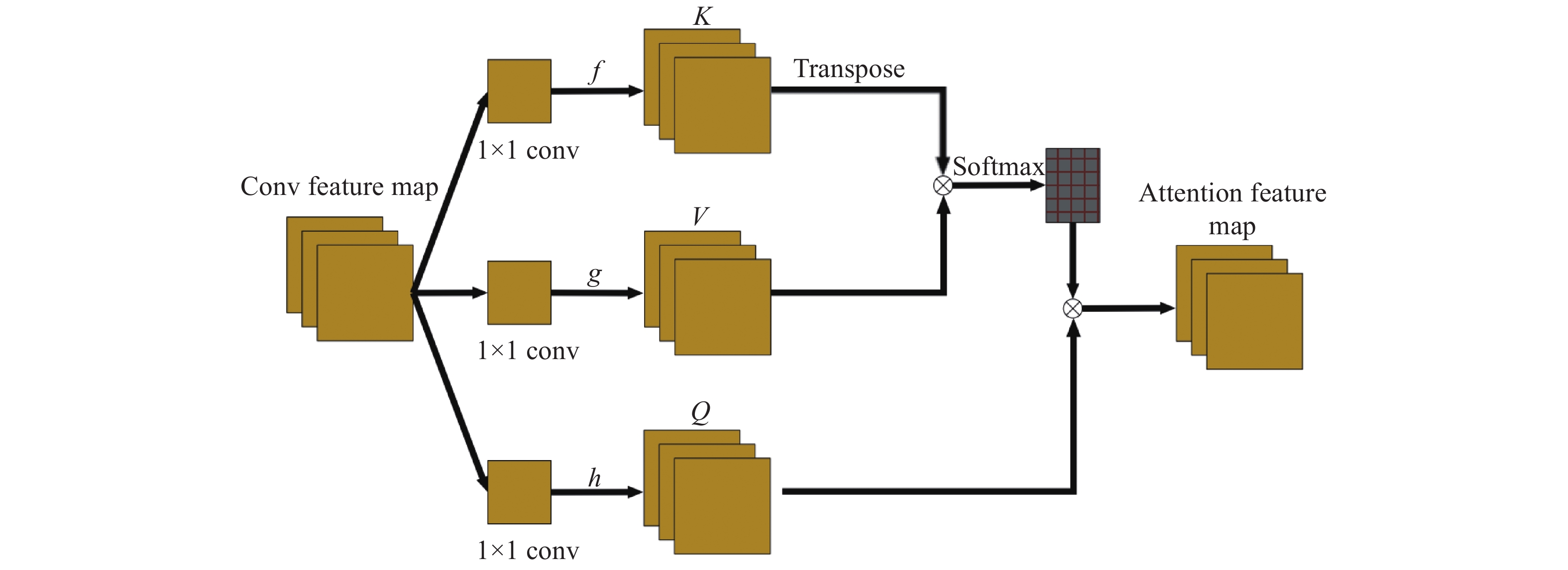
子空间聚类(Subspace clustering)是一种当前较为流行的基于谱聚类的高维数据聚类框架. 近年来, 由于深度神经网络能够有效地挖掘出数据深层特征, 其研究倍受各国学者的关注. 深度子空间聚类旨在通过深度网络学习原始数据的低维特征表示, 计算出数据集的相似度矩阵, 然后利用谱聚类获得数据的最终聚类结果. 然而, 现实数据存在维度过高、数据结构复杂等问题, 如何获得更鲁棒的数据表示, 改善聚类性能, 仍是一个挑战. 因此, 本文提出基于自注意力对抗的深度子空间聚类算法(SAADSC). 利用自注意力对抗网络在自动编码器的特征学习中施加一个先验分布约束, 引导所学习的特征表示更具有鲁棒性, 从而提高聚类精度. 通过在多个数据集上的实验, 结果表明本文算法在精确率(ACC)、标准互信息(NMI)等指标上都优于目前最好的方法.
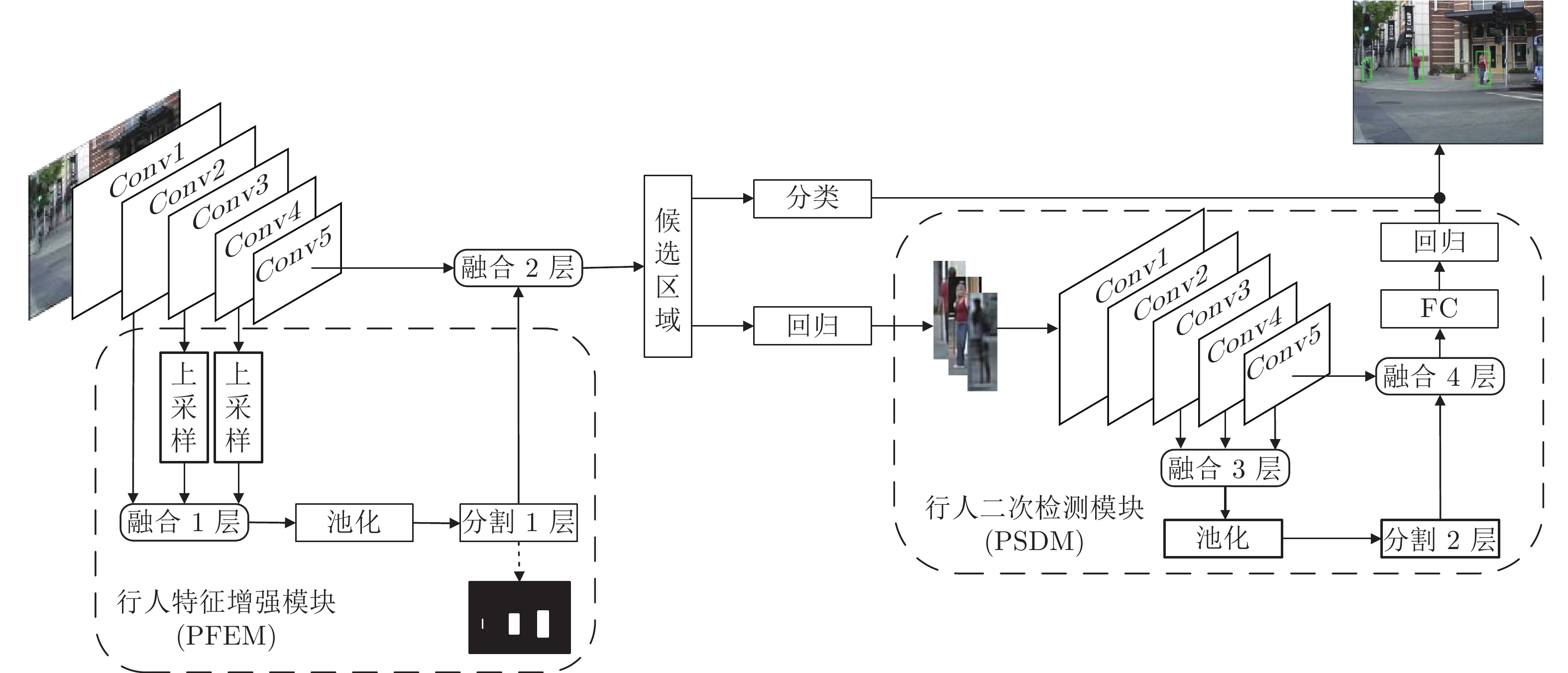
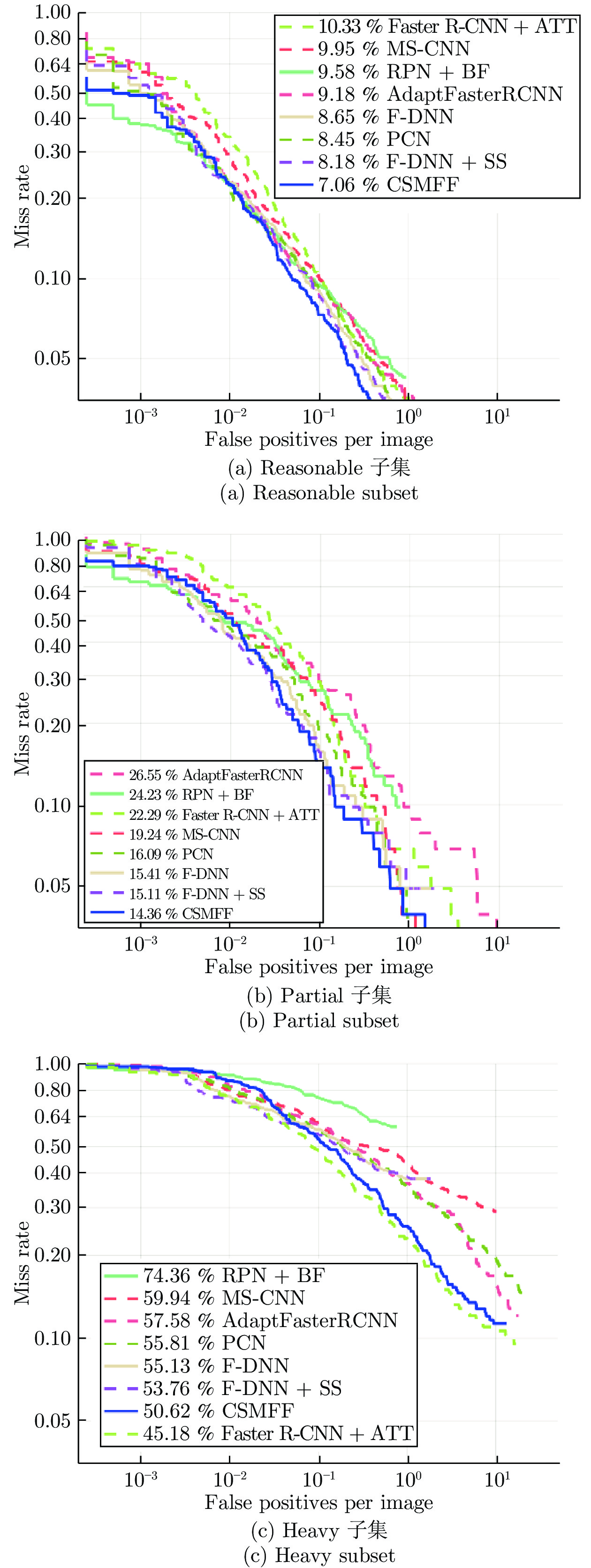
遮挡及背景中相似物干扰是行人检测准确率较低的主要原因. 针对该问题, 提出一种结合语义和多层特征融合(Combining semantics with multi-level feature fusion, CSMFF)的行人检测算法. 首先, 融合多个卷积层特征, 并在融合层上添加语义分割, 得到的语义特征与相应的卷积层连接作为行人位置的先验信息, 增强行人和背景的辨别性. 然后, 在初步回归的基础上构建行人二次检测模块(Pedestrian secondary detection module, PSDM), 进一步排除误检物体. 实验结果表明, 所提算法在数据集Caltech和CityPersons上漏检率(Miss rate, MR)为7.06 %和11.2 %. 该算法对被遮挡的行人具有强鲁棒性, 同时可方便地嵌入到其他检测框架.


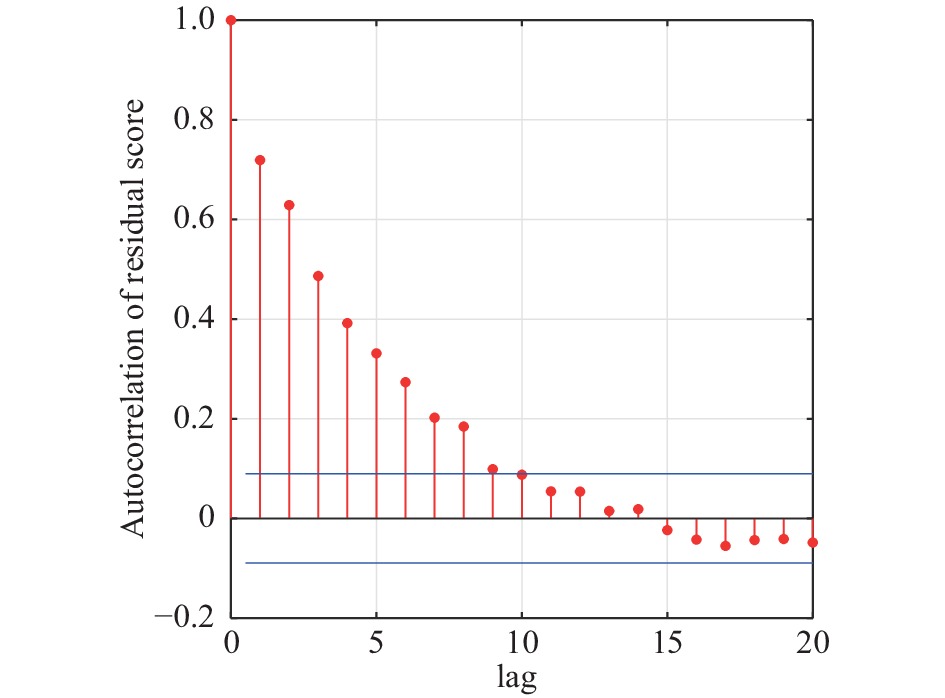
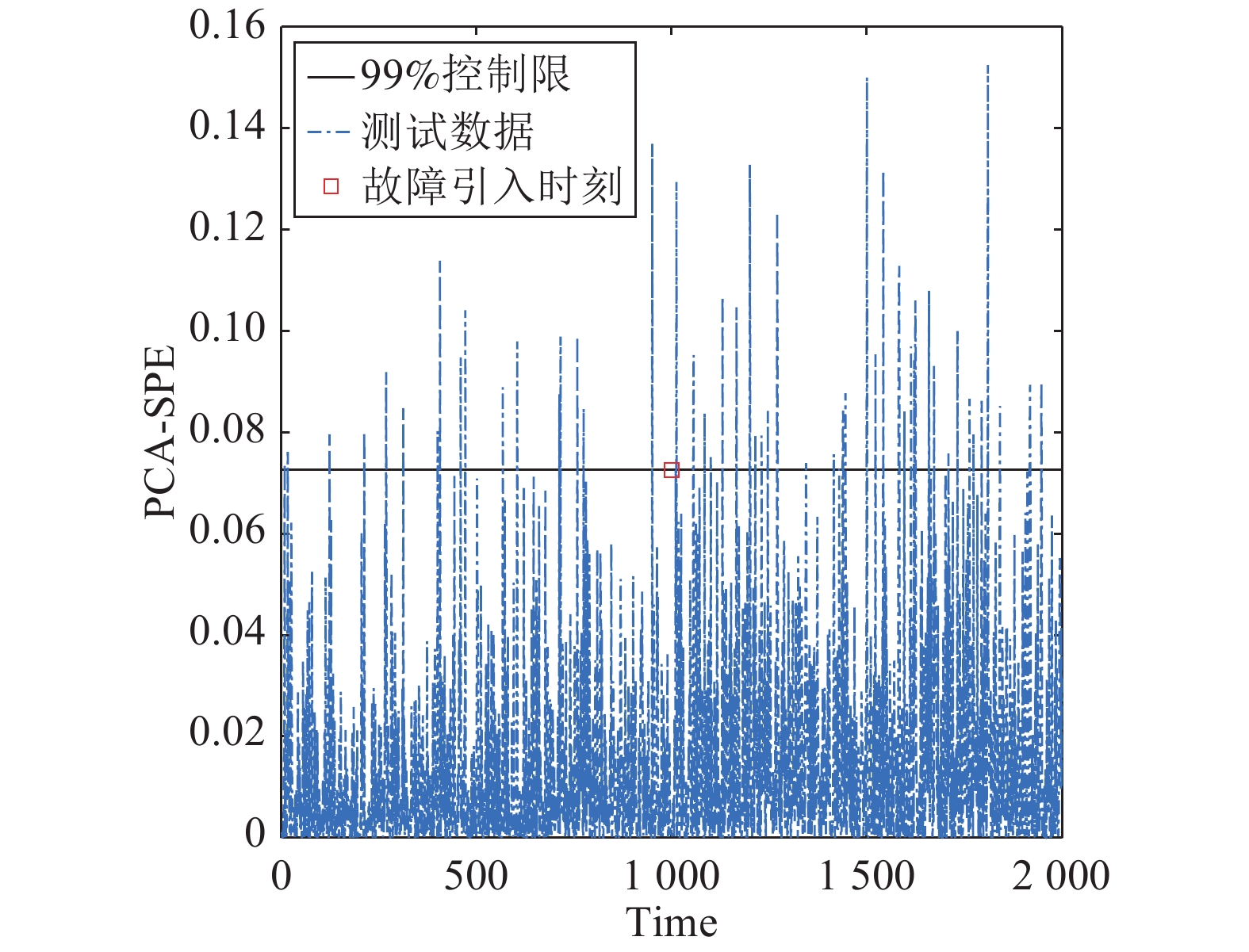
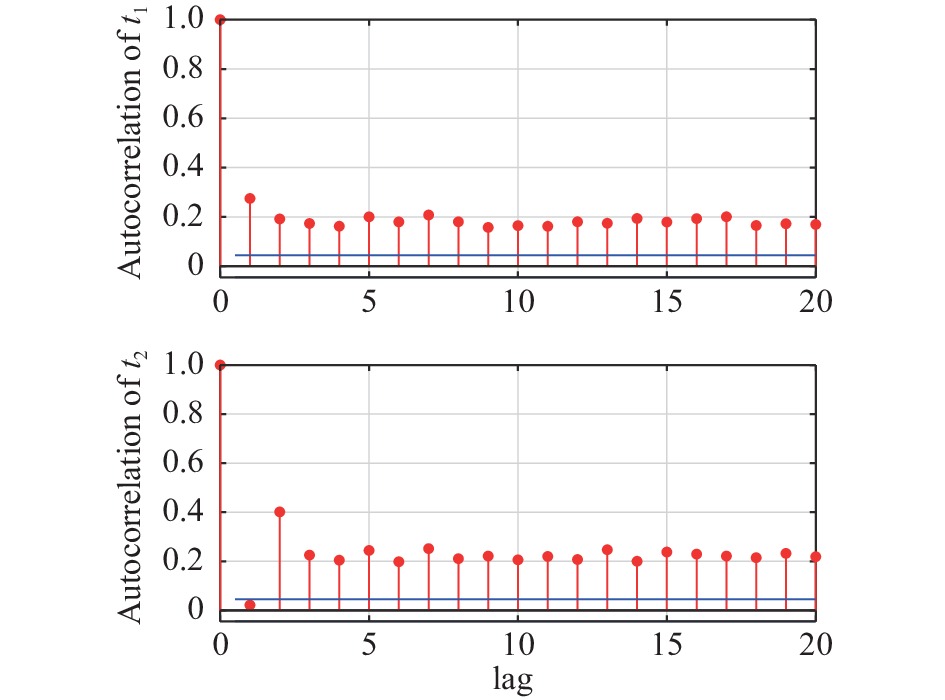
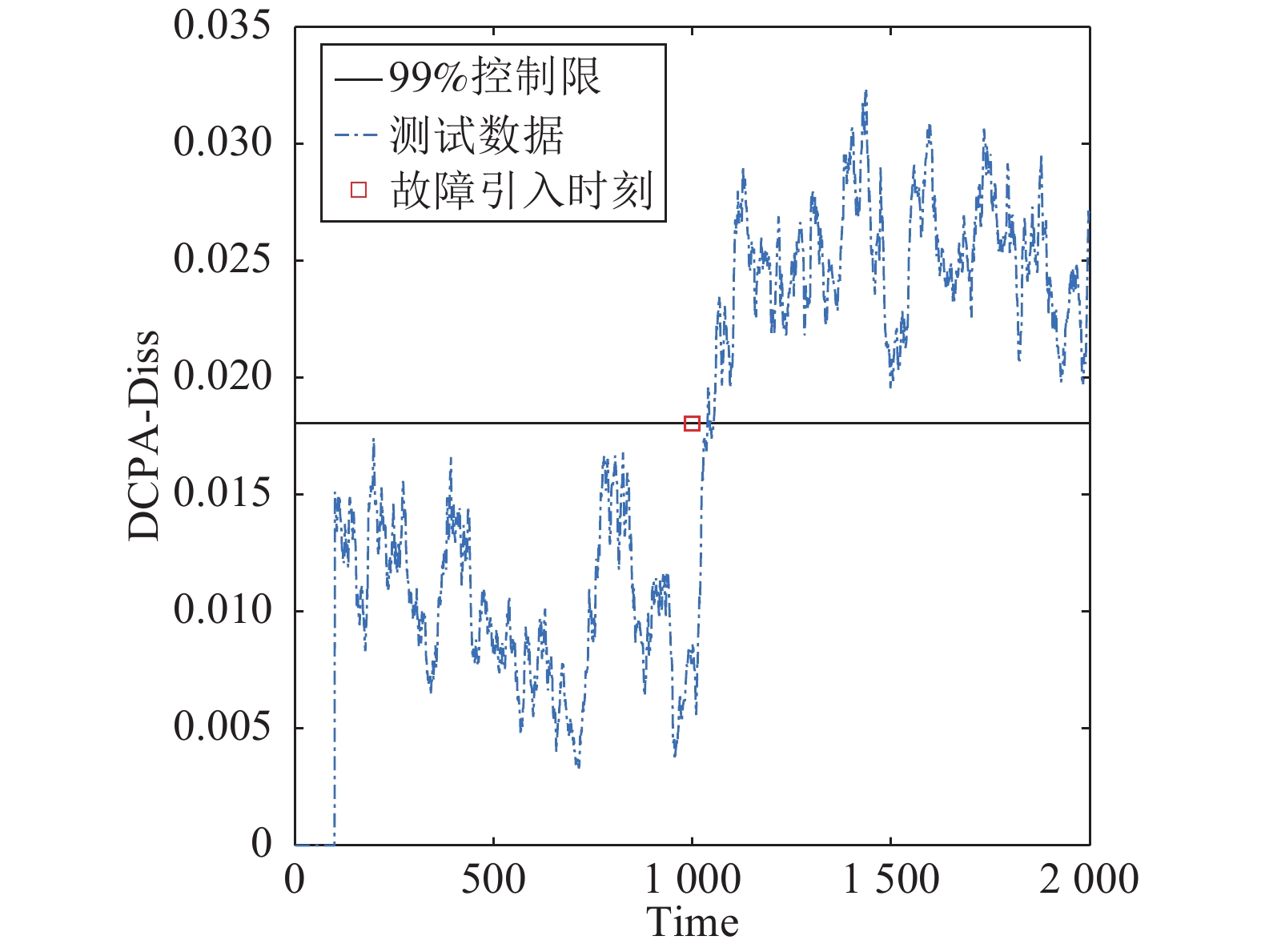
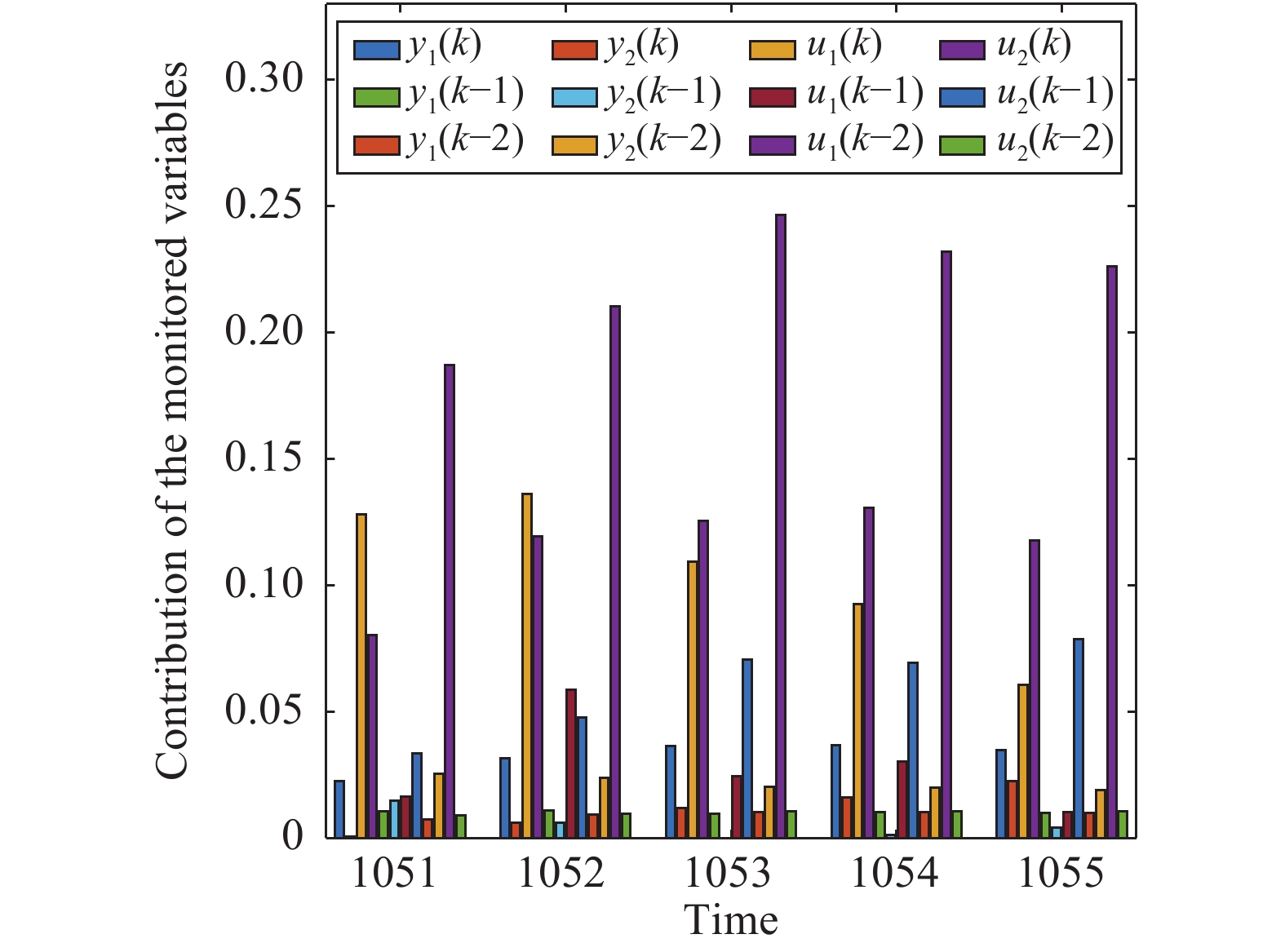
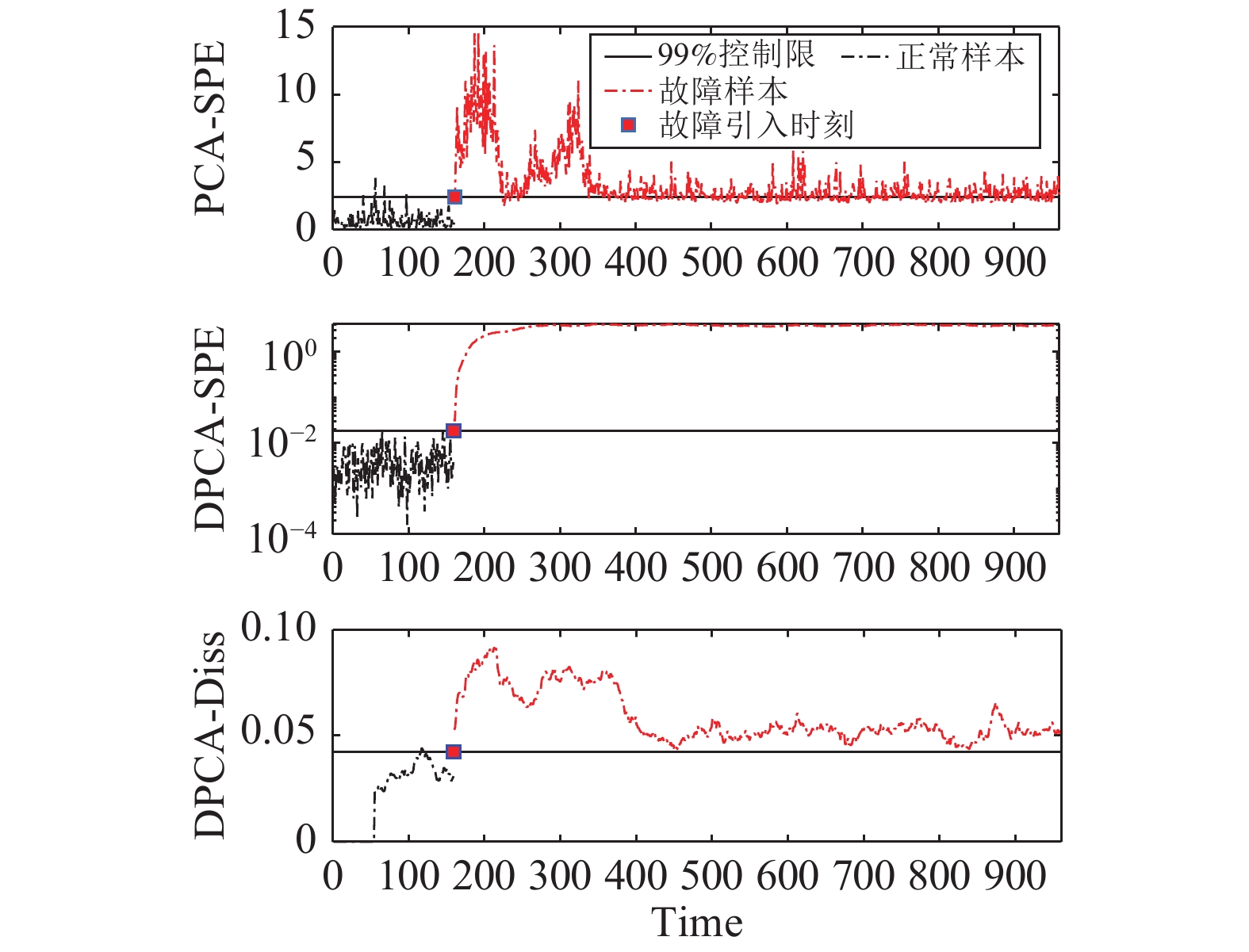
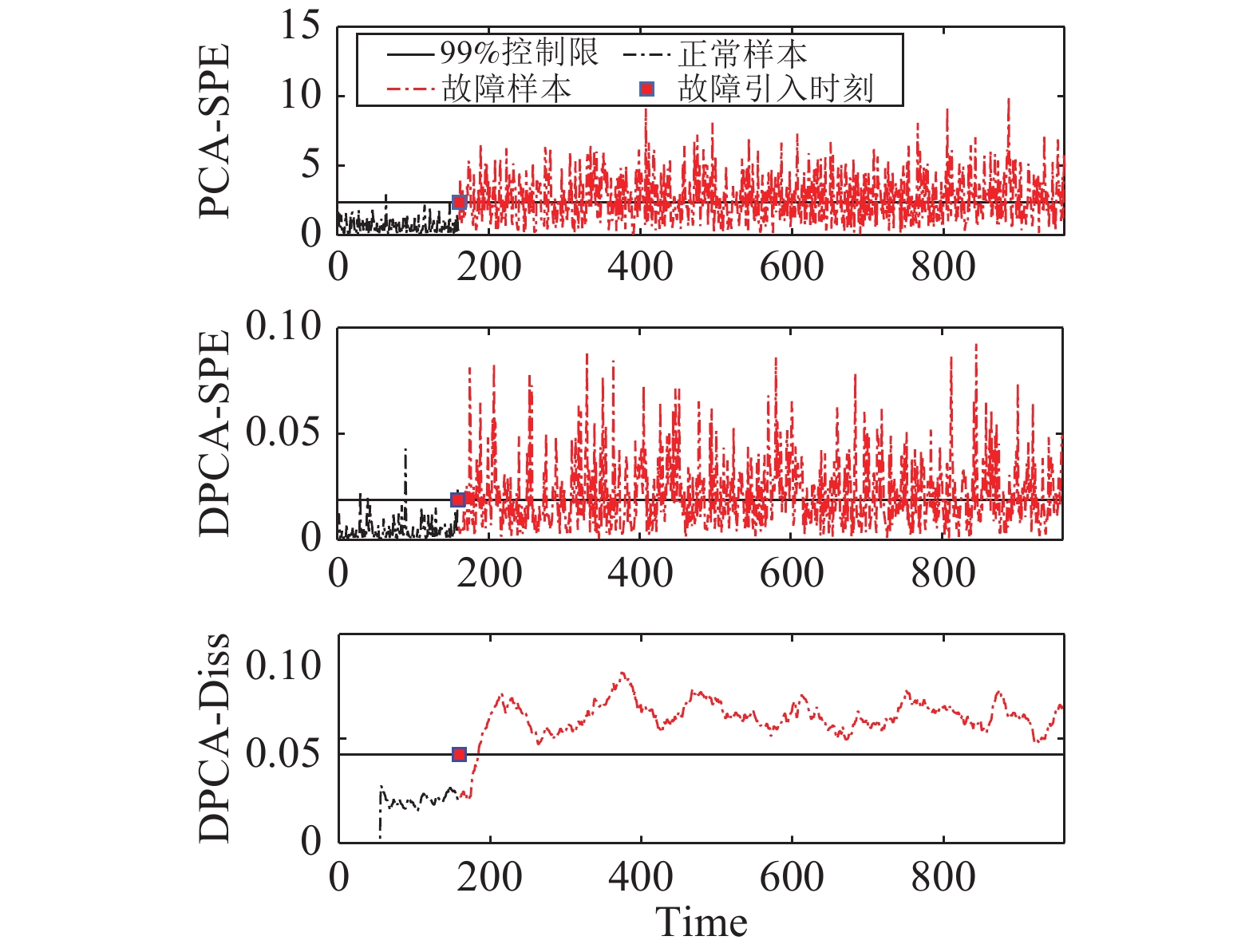
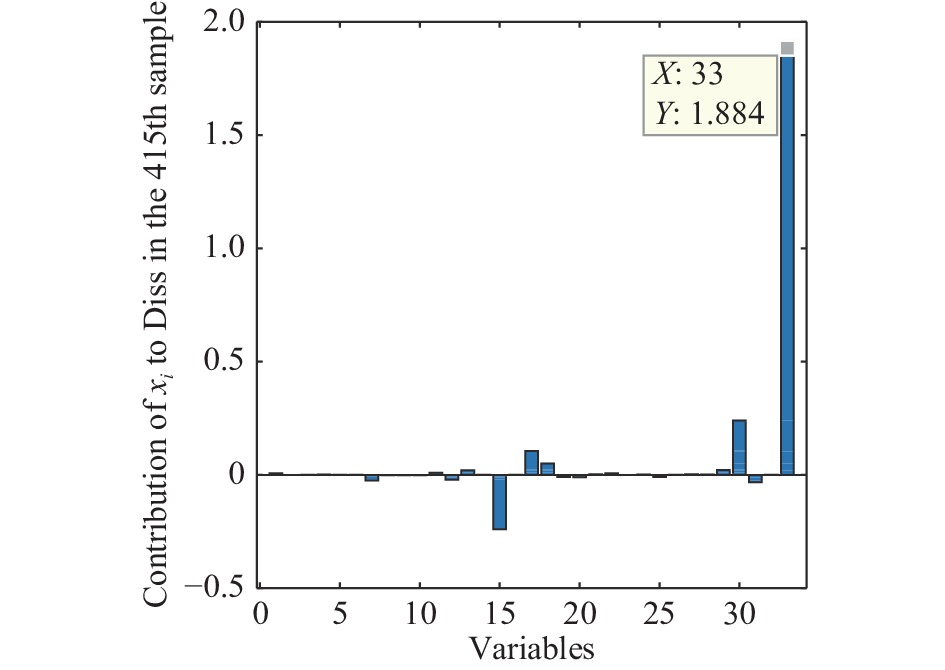
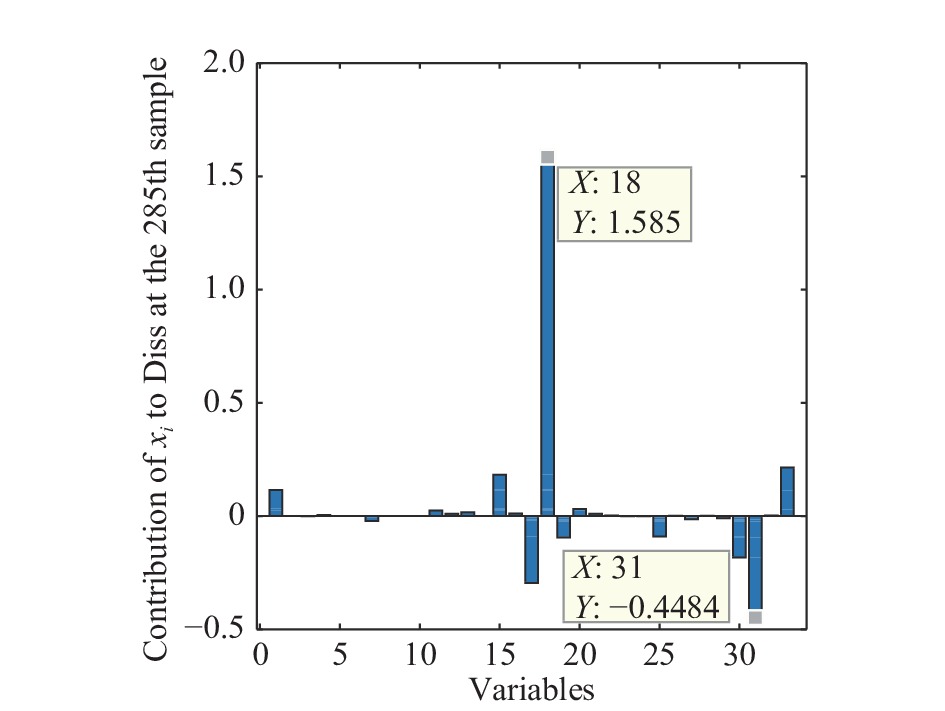
针对动态主元分析方法中残差自相关性降低过程故障检测率问题, 提出基于动态主元分析残差互异度的故障检测与诊断方法. 首先, 应用动态主元分析(Dynamic principal component analysis, DPCA)计算动态过程数据的残差得分; 接下来, 应用滑动窗口技术并结合互异度指标(Dissimilarity)来监控过程残差得分状态; 最后, 利用基于变量贡献图的方法进行过程故障诊断分析. 本文方法通过DPCA捕获过程的动态特征, 同时互异度指标区别于传统的平方预测误差(Square prediction error, SPE), 它可以有效地对具有自相关性的残差得分进行过程状态监控. 通过一个数值例子和Tennessee Eastman (TE)过程的仿真实验并与传统方法对比分析, 仿真结果进一步证实了本文方法的有效性.



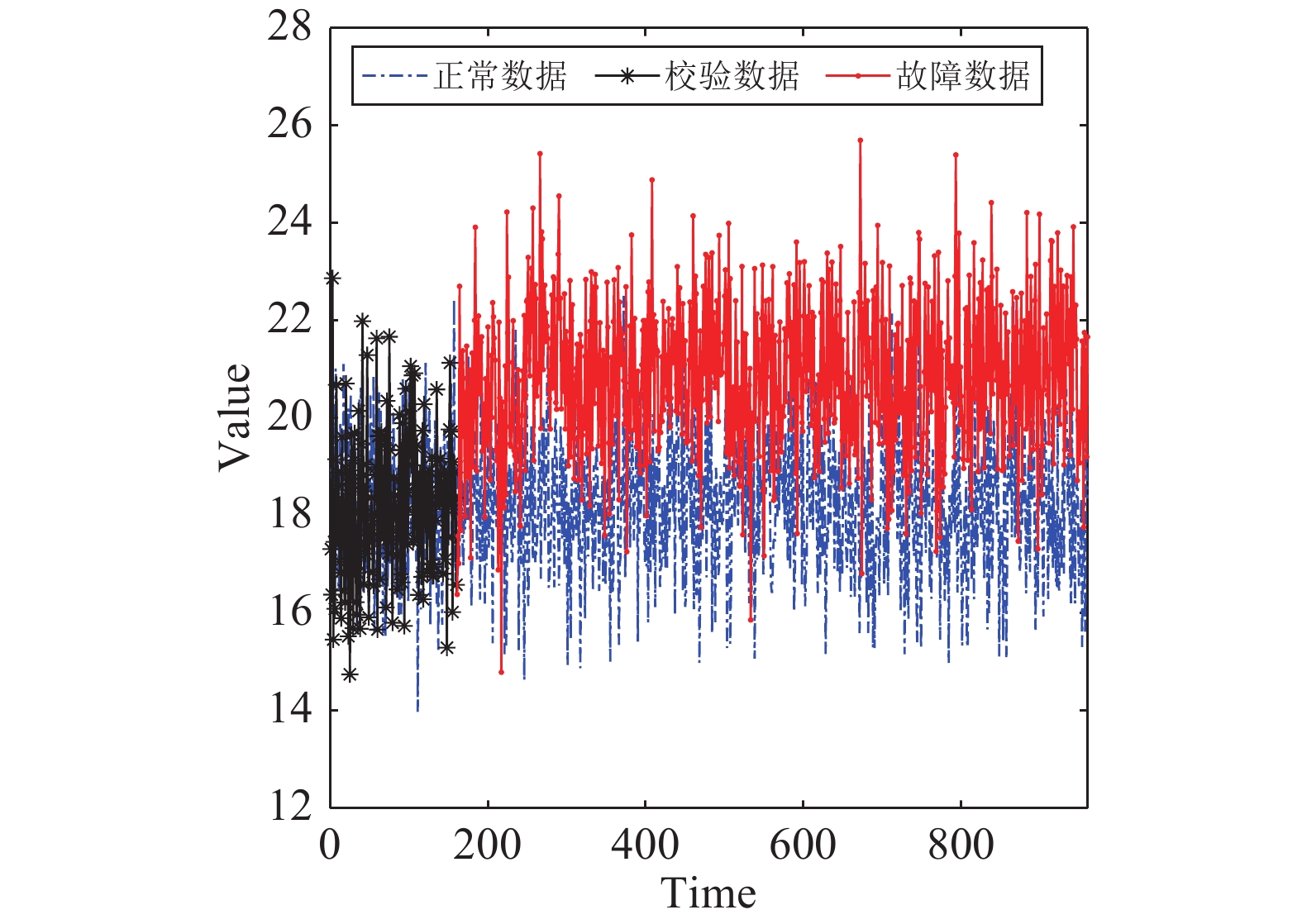

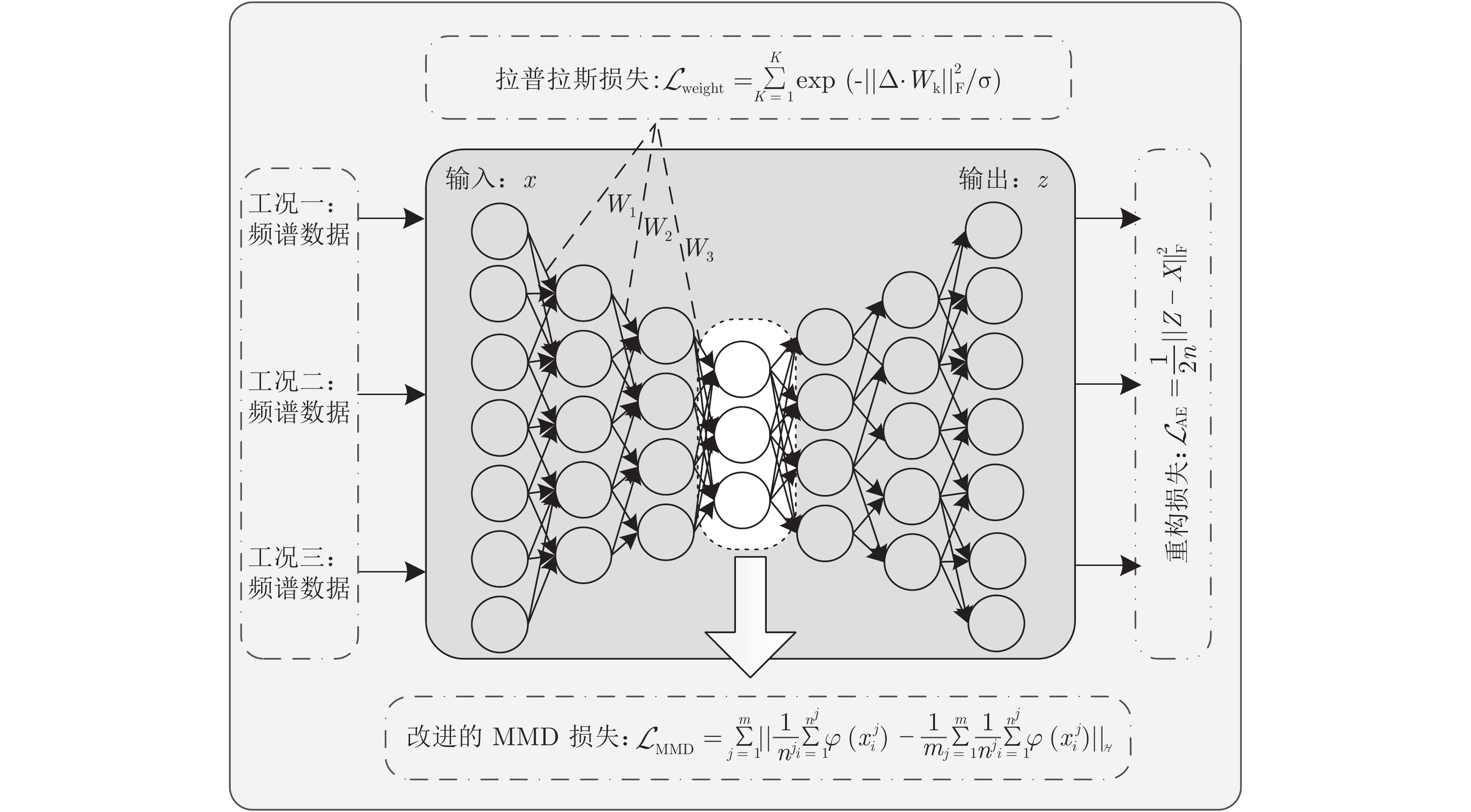
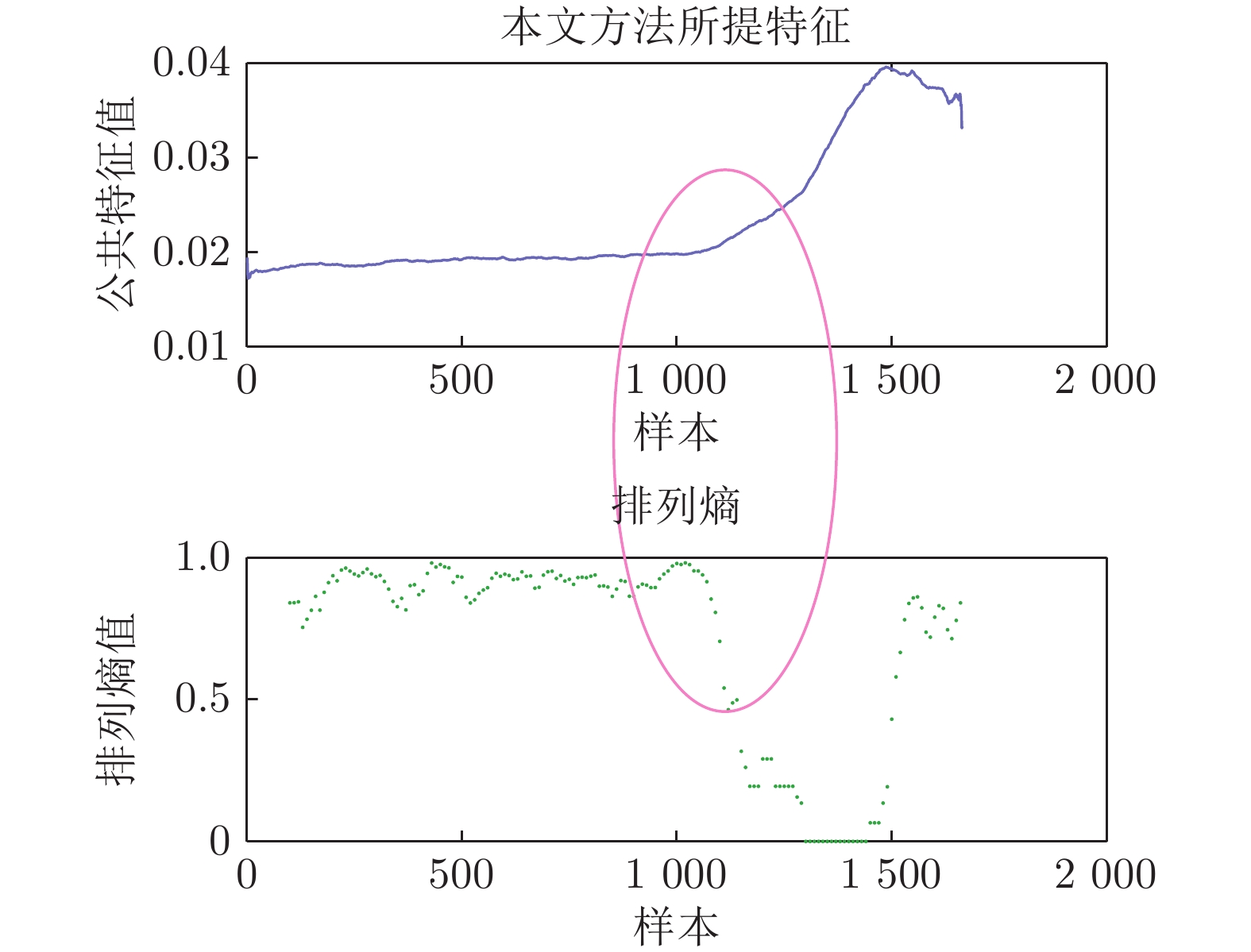
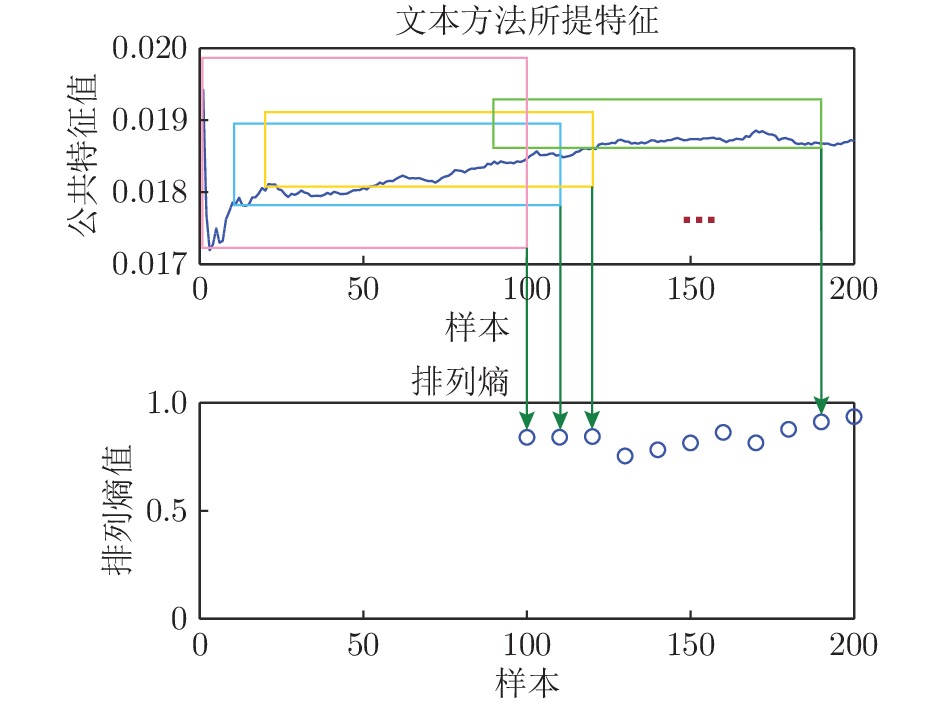
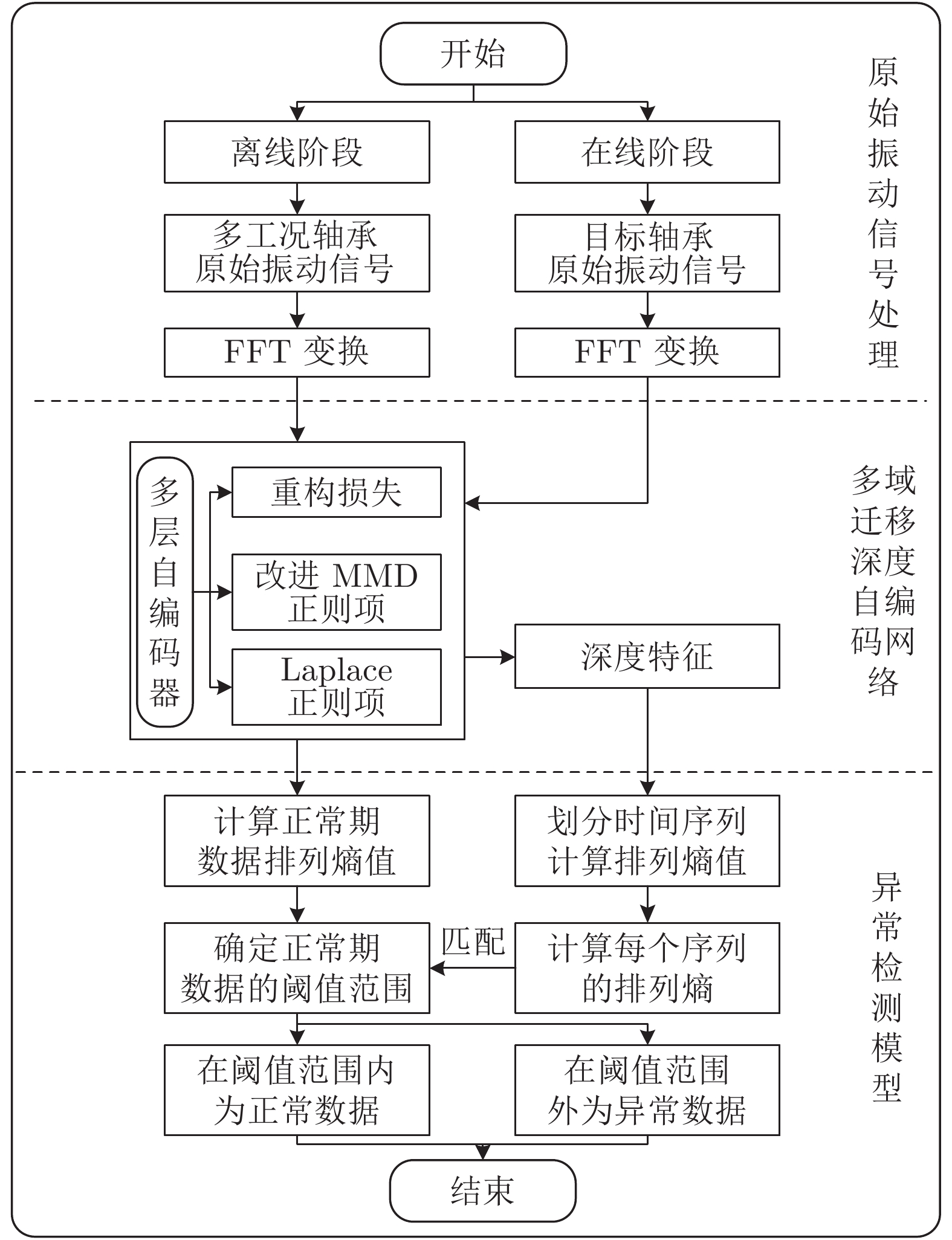
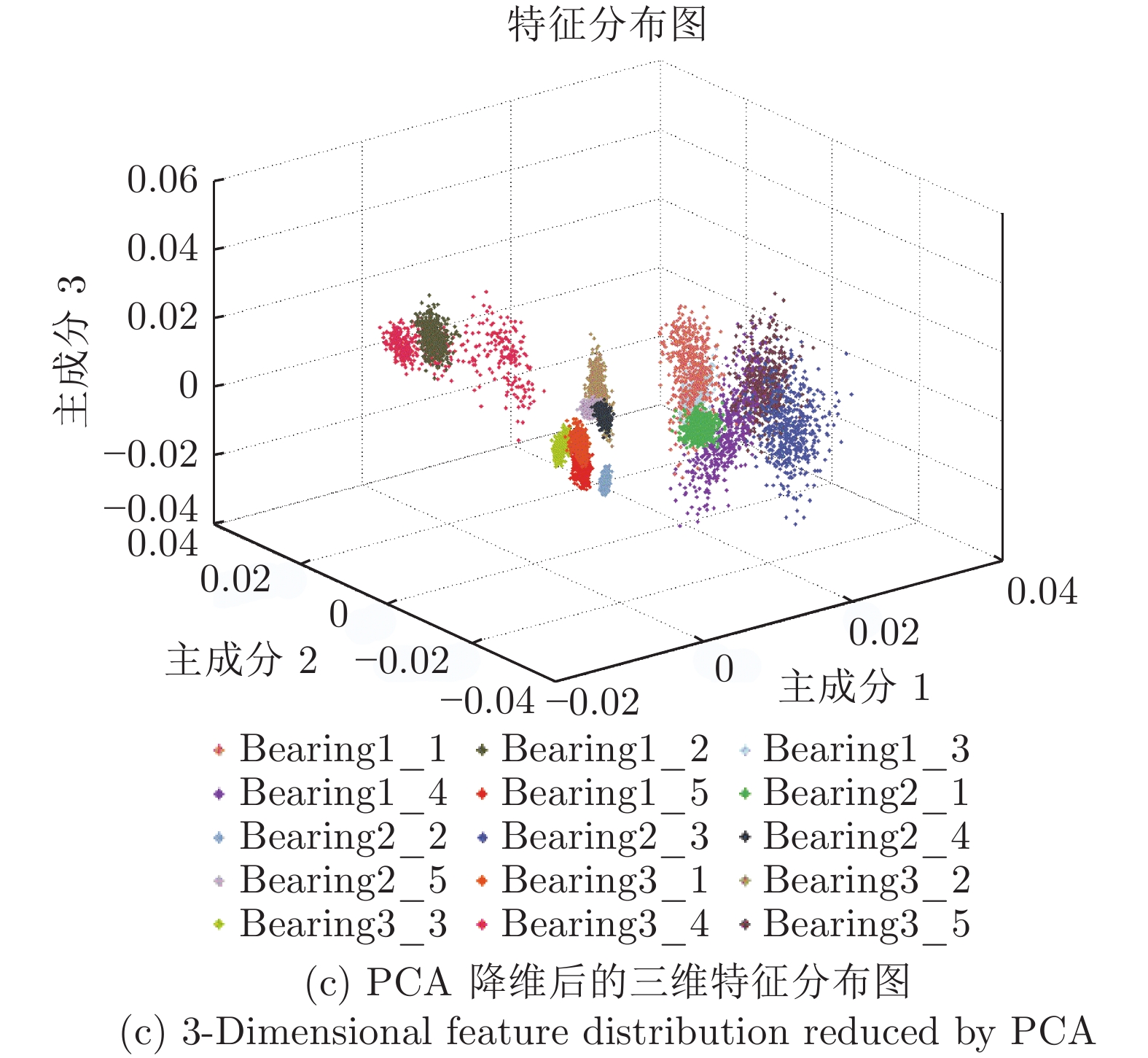
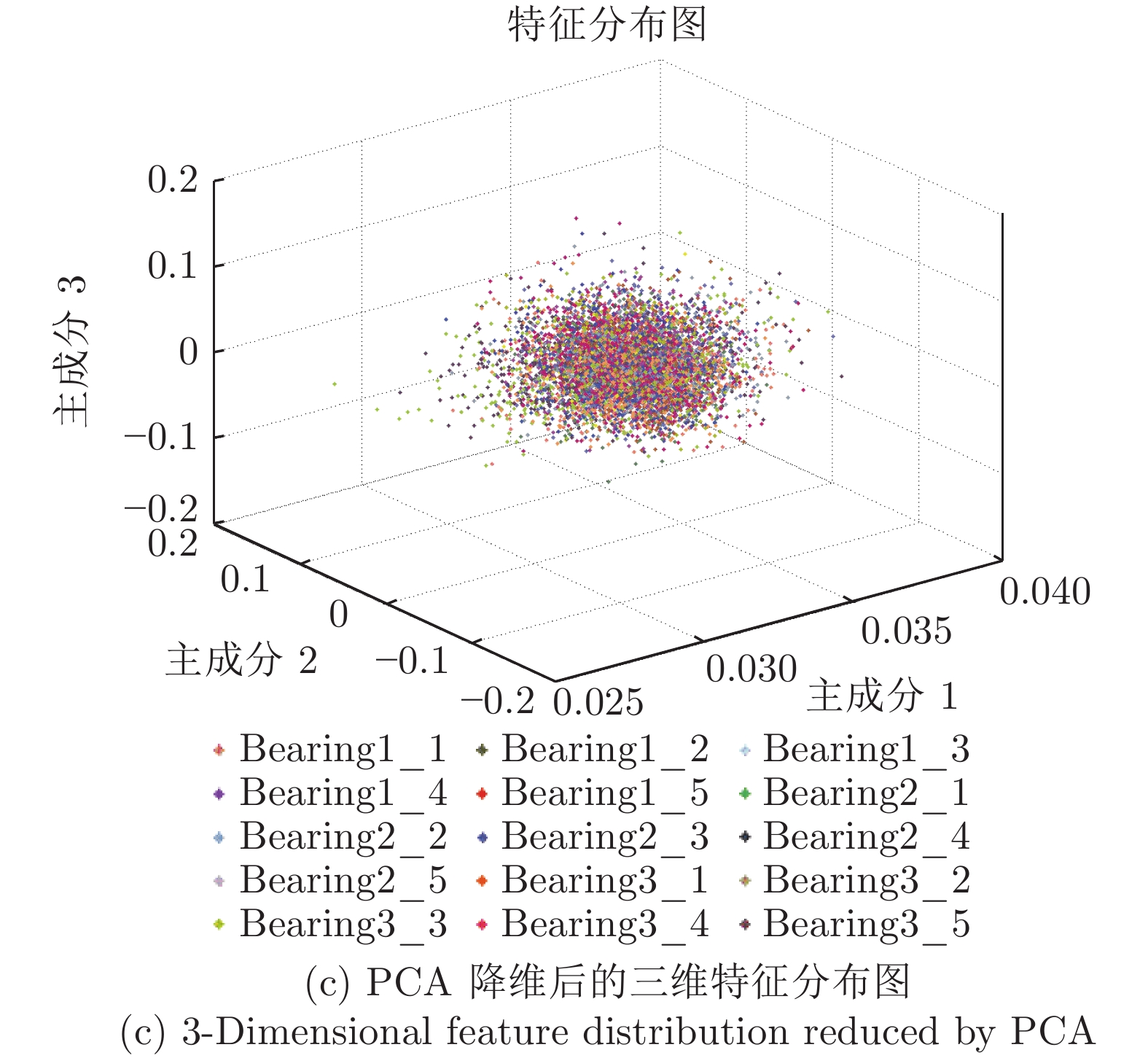
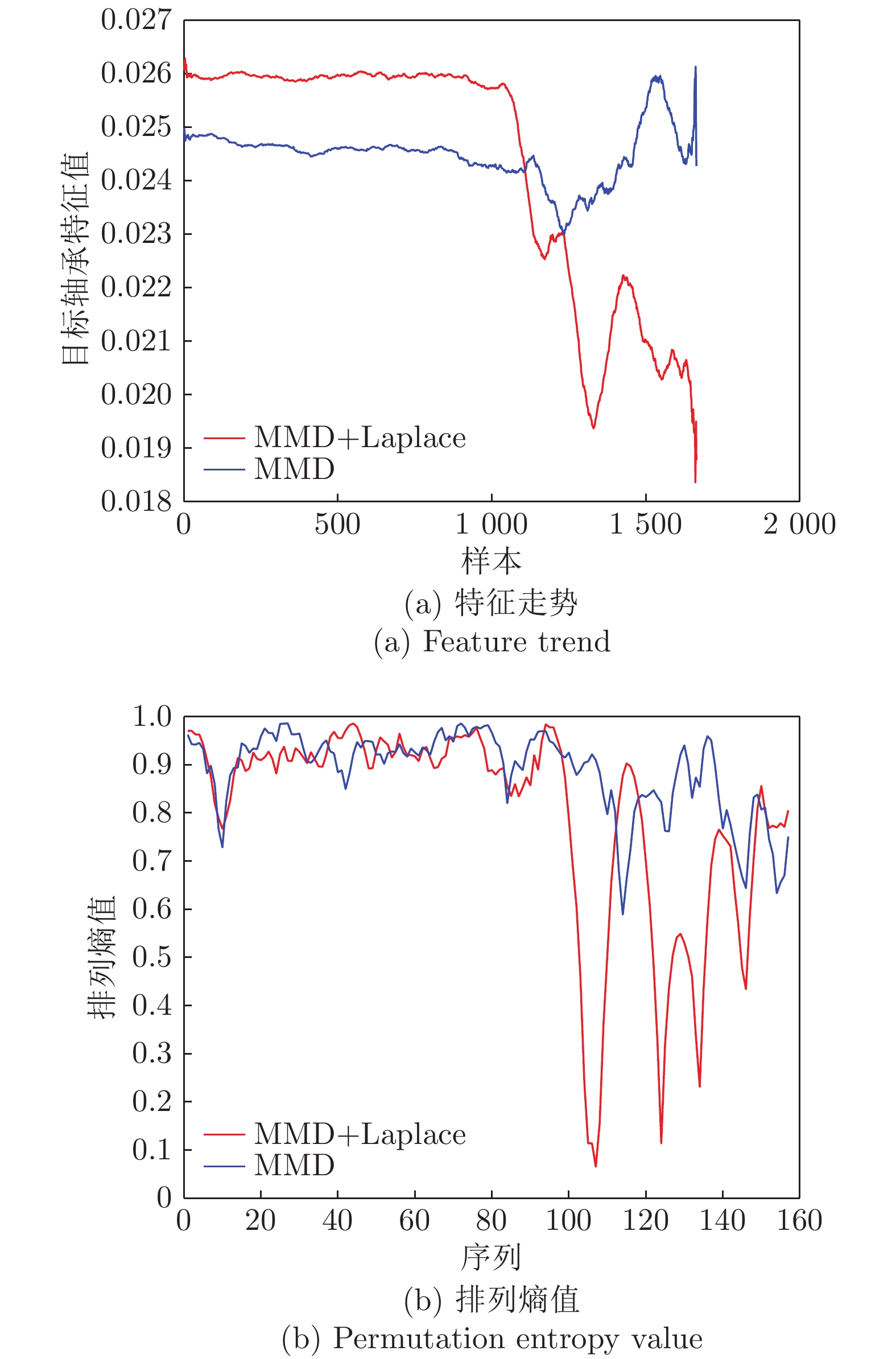
近年来, 深度学习技术已在滚动轴承故障检测和诊断领域取得了成功应用, 但面对不停机情况下的早期故障在线检测问题, 仍存在着早期故障特征表示不充分、误报警率高等不足. 为解决上述问题, 本文从时序异常检测的角度出发, 提出了一种基于深度迁移学习的早期故障在线检测方法. 首先, 提出一种面向多域迁移的深度自编码网络, 通过构建具有改进的最大均值差异正则项和Laplace正则项的损失函数, 在自适应提取不同域数据的公共特征表示同时, 提高正常状态和早期故障状态之间特征的差异性; 基于该特征表示, 提出一种基于时序异常模式的在线检测模型, 利用离线轴承正常状态的排列熵值构建报警阈值, 实现在线数据中异常序列的快速匹配, 同时提高在线检测结果的可靠性. 在XJTU-SY数据集上的实验结果表明, 与现有代表性早期故障检测方法相比, 本文方法具有更好的检测实时性和更低的误报警数.