2020年 第46卷 第3期
2020, 46(3): 397-410.
doi: 10.16383/j.aas.2020.y000001
摘要:
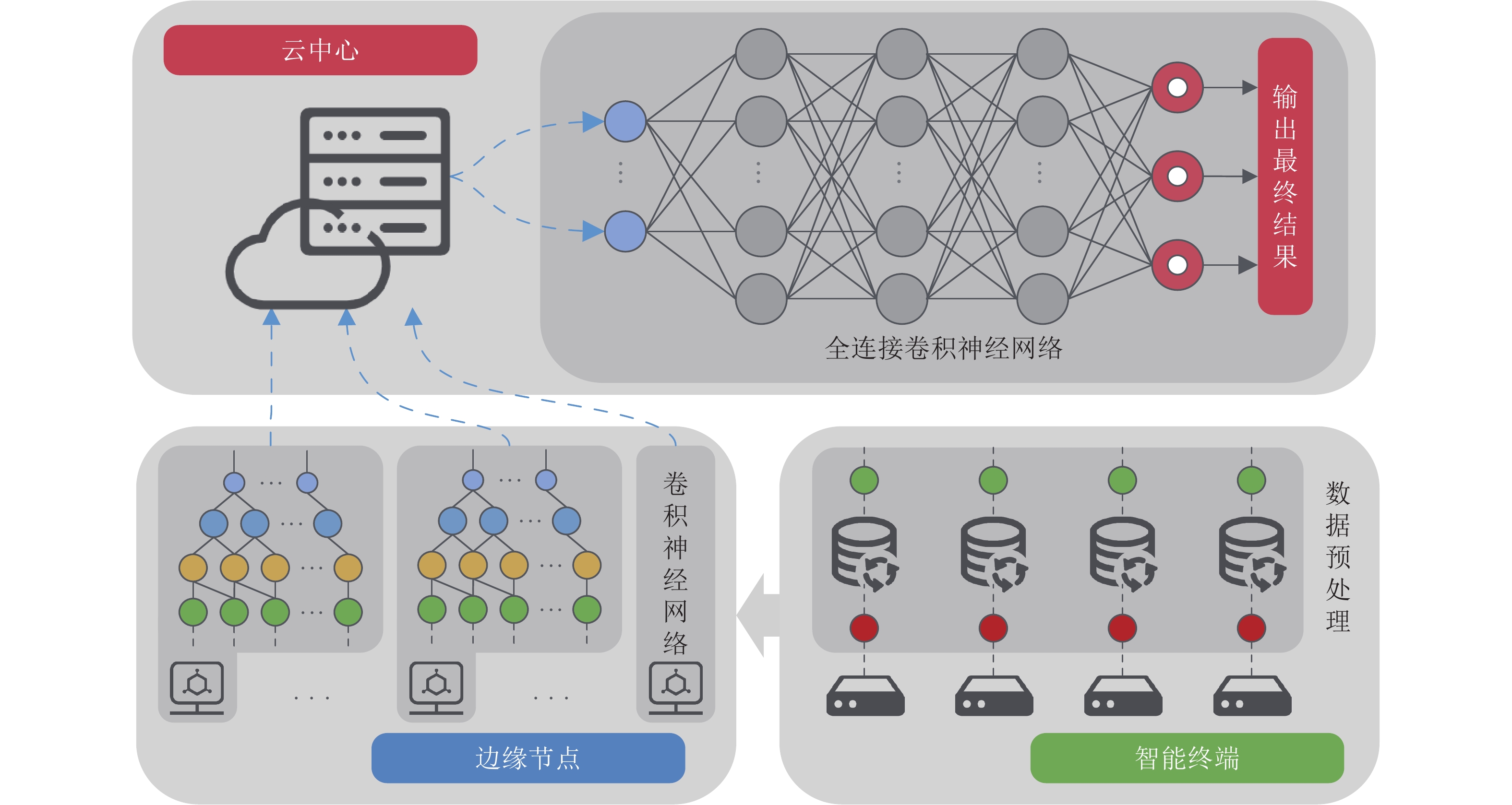
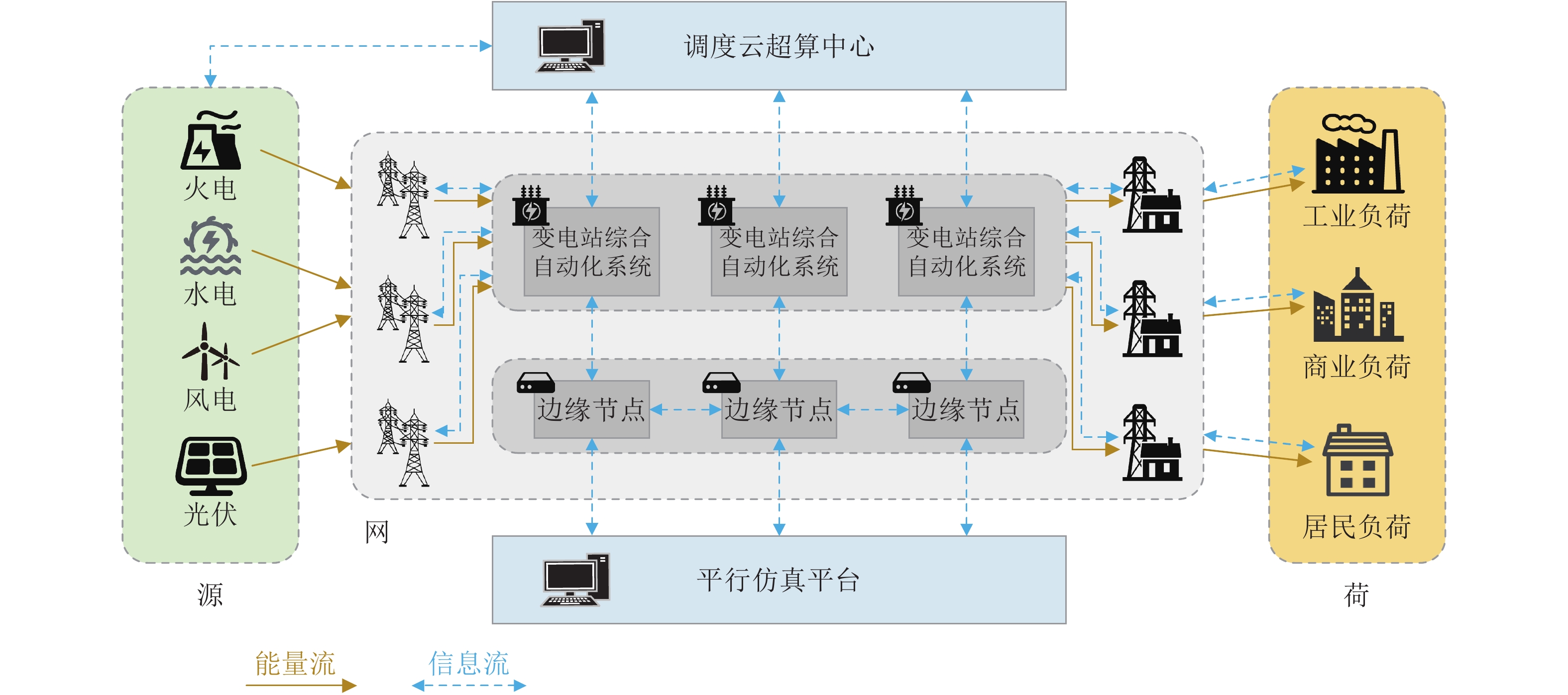
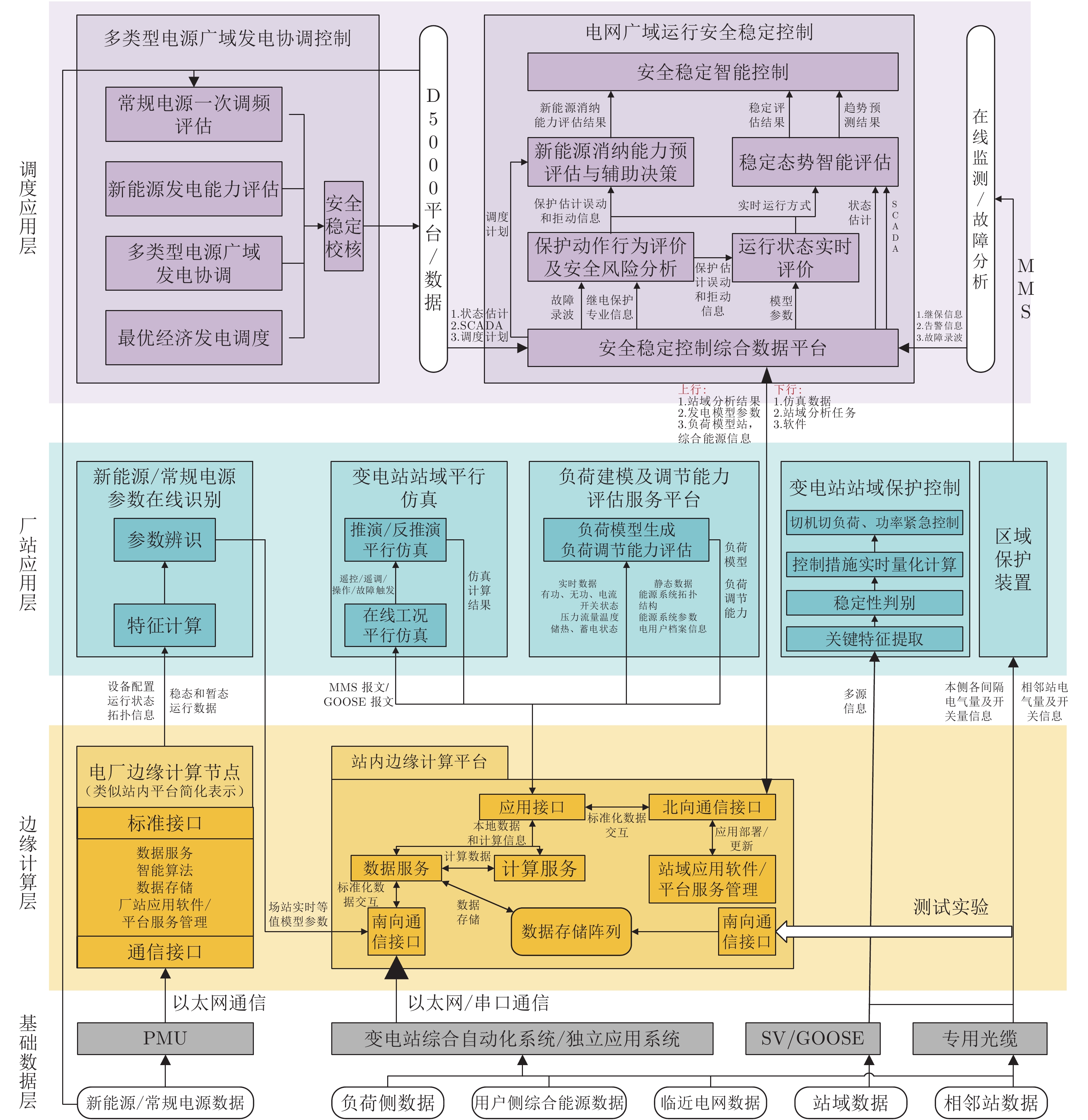
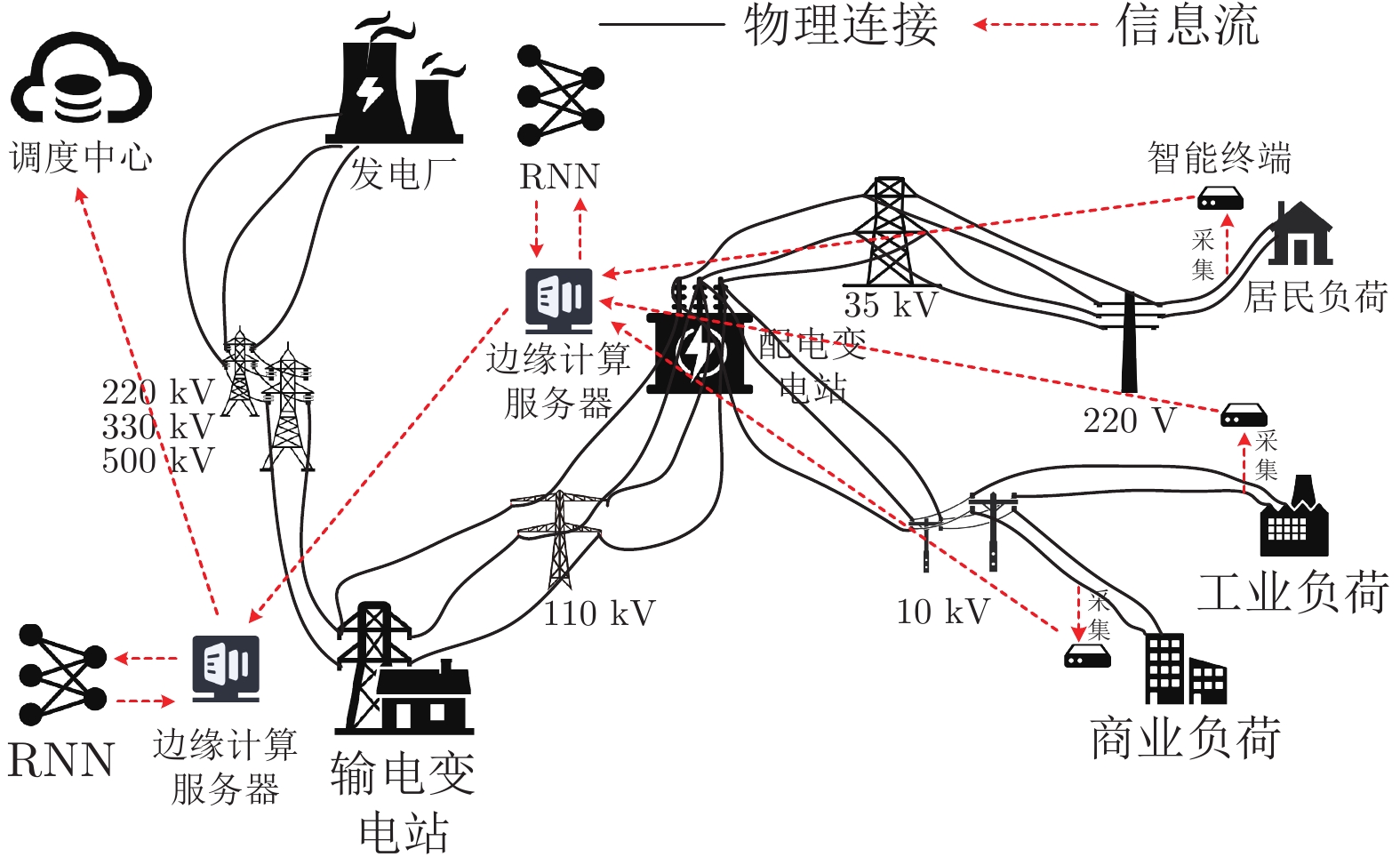
本文分析了当前我国电力系统的运行与控制面临的挑战, 对边缘计算的发展背景和关键技术进行了介绍, 阐述了云边协同和边边协同的功能与特征, 并对边缘协同技术下的边缘智能技术进行了探讨. 结合电力系统的层级式构架, 讨论了在电网部署边缘计算层的方法, 提出利用云边协同、边边协同、边缘智能等技术解决电力系统面临的实时性高、数据周期短、任务复杂等难题, 在减轻边缘节点与云中心通信压力的同时, 提高业务服务质量, 保障边缘节点的数据隐私. 通过对边缘计算在“源 − 网 − 荷”各环节的应用前景进行分析与讨论, 阐述了边缘计算在电网中的可行性与实用性. 最后, 对边缘计算的应用范式与方案进行了总结, 并对其在未来电力系统中的发展方向进行了展望.
本文分析了当前我国电力系统的运行与控制面临的挑战, 对边缘计算的发展背景和关键技术进行了介绍, 阐述了云边协同和边边协同的功能与特征, 并对边缘协同技术下的边缘智能技术进行了探讨. 结合电力系统的层级式构架, 讨论了在电网部署边缘计算层的方法, 提出利用云边协同、边边协同、边缘智能等技术解决电力系统面临的实时性高、数据周期短、任务复杂等难题, 在减轻边缘节点与云中心通信压力的同时, 提高业务服务质量, 保障边缘节点的数据隐私. 通过对边缘计算在“源 − 网 − 荷”各环节的应用前景进行分析与讨论, 阐述了边缘计算在电网中的可行性与实用性. 最后, 对边缘计算的应用范式与方案进行了总结, 并对其在未来电力系统中的发展方向进行了展望.



2020, 46(3): 411-426.
doi: 10.16383/j.aas.c180052
摘要:
根据研究重点的不同, 从群目标跟踪的建模和滤波算法方面展开综述, 主要包括:量测处理、扩展外形建模、内部关系建模、群分裂/合并建模以及滤波算法等.最后, 基于群目标跟踪现有研究进展和未来可能面临的挑战, 对群目标跟踪领域需要重点研究和关注的方向作了展望.
根据研究重点的不同, 从群目标跟踪的建模和滤波算法方面展开综述, 主要包括:量测处理、扩展外形建模、内部关系建模、群分裂/合并建模以及滤波算法等.最后, 基于群目标跟踪现有研究进展和未来可能面临的挑战, 对群目标跟踪领域需要重点研究和关注的方向作了展望.





2020, 46(3): 427-438.
doi: 10.16383/j.aas.c180286
摘要:
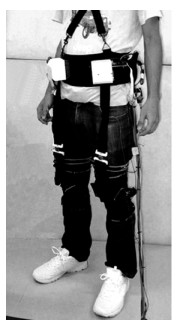
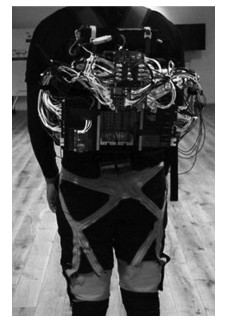
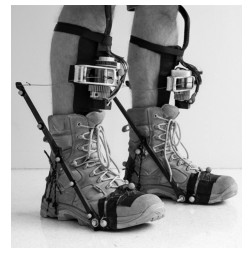
穿戴式柔性下肢助力机器人技术在康复医疗、助老助残、生活起居等方面具有广阔的应用前景, 具有质量轻、体积小、可穿戴性强、人机相容性好等优势.为促进我国柔性下肢助力机器人的研究和发展, 总结国内外在该领域的研究进展, 阐述了多种助力系统的组成、驱动原理和运动学信息等, 分析了各助力系统的辅助力/矩传递规律及其助力效果.同时, 对柔性下肢助力机器人所涉及的安全与可靠性、步态检测技术、驱动方式及控制策略、助力性能评估等关键技术进行了分析.在总结研究成果及分析关键技术的基础上, 指出柔性下肢助力机器人今后的发展方向、研究思路和面临的挑战.对于柔性下肢助力机器人及相关的研究工作, 具有一定的指导意义.
穿戴式柔性下肢助力机器人技术在康复医疗、助老助残、生活起居等方面具有广阔的应用前景, 具有质量轻、体积小、可穿戴性强、人机相容性好等优势.为促进我国柔性下肢助力机器人的研究和发展, 总结国内外在该领域的研究进展, 阐述了多种助力系统的组成、驱动原理和运动学信息等, 分析了各助力系统的辅助力/矩传递规律及其助力效果.同时, 对柔性下肢助力机器人所涉及的安全与可靠性、步态检测技术、驱动方式及控制策略、助力性能评估等关键技术进行了分析.在总结研究成果及分析关键技术的基础上, 指出柔性下肢助力机器人今后的发展方向、研究思路和面临的挑战.对于柔性下肢助力机器人及相关的研究工作, 具有一定的指导意义.










2020, 46(3): 439-450.
doi: 10.16383/j.aas.c180018
摘要:
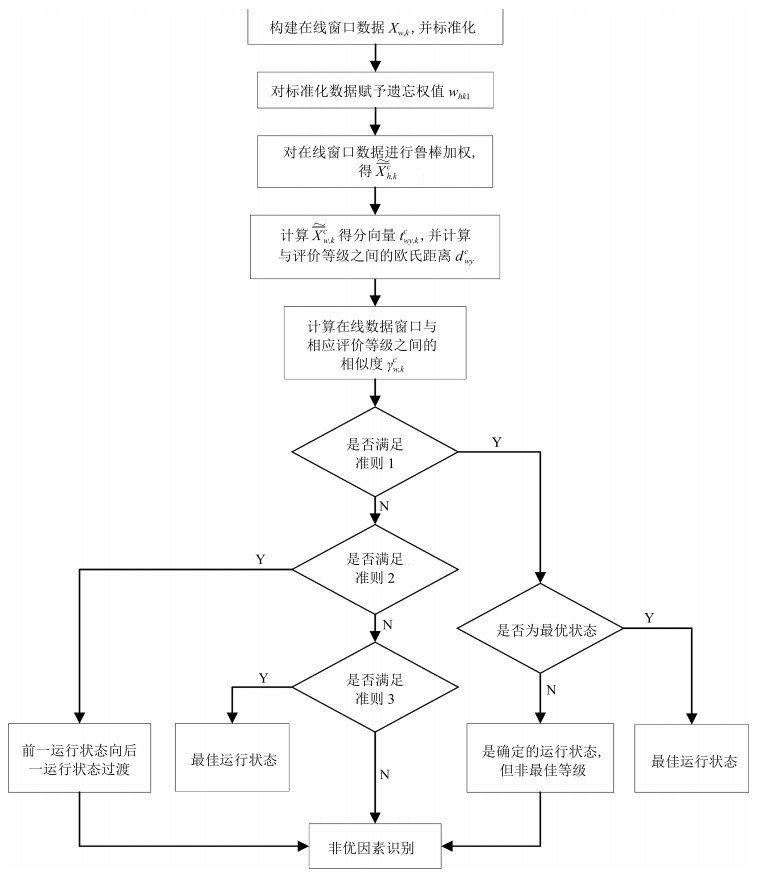
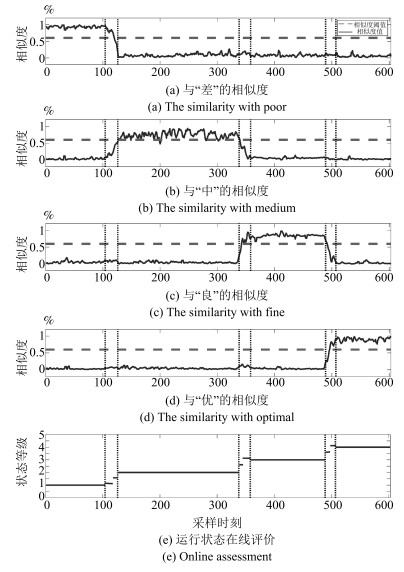
在现代复杂工业生产过程中, 细致而稳健的运行状态评价及非优因素识别对指导工业生产具有十分重要的实际意义.考虑到复杂工业过程难以建立准确的数学模型和实际工业过程数据噪声及离群点污染比较严重的问题, 本文提出一种全潜鲁棒偏M估计的复杂工业过程最优状态的鲁棒评价方法.在建立离线评价模型时, 通过对过程数据主元和残差子空间的进一步分解, 提取出能够反映与原材料、生产消耗和产品质量等因素相关的经济指标的变化信息, 同时采用样本数据加权的方法消除离群点对评价模型的不利影响, 提高算法的鲁棒性; 在线评价时, 针对生产过程中存在不确定性因素, 引入在线数据窗口及相似度分析进行在线评价, 并给出在线评价的准则和流程, 提高评价结果的可靠性, 当评价结果非优时, 通过计算相应变量的贡献率识别非优因素.最后, 通过重介质选煤过程验证了所提方法的有效性.
在现代复杂工业生产过程中, 细致而稳健的运行状态评价及非优因素识别对指导工业生产具有十分重要的实际意义.考虑到复杂工业过程难以建立准确的数学模型和实际工业过程数据噪声及离群点污染比较严重的问题, 本文提出一种全潜鲁棒偏M估计的复杂工业过程最优状态的鲁棒评价方法.在建立离线评价模型时, 通过对过程数据主元和残差子空间的进一步分解, 提取出能够反映与原材料、生产消耗和产品质量等因素相关的经济指标的变化信息, 同时采用样本数据加权的方法消除离群点对评价模型的不利影响, 提高算法的鲁棒性; 在线评价时, 针对生产过程中存在不确定性因素, 引入在线数据窗口及相似度分析进行在线评价, 并给出在线评价的准则和流程, 提高评价结果的可靠性, 当评价结果非优时, 通过计算相应变量的贡献率识别非优因素.最后, 通过重介质选煤过程验证了所提方法的有效性.



2020, 46(3): 451-462.
doi: 10.16383/j.aas.c180788
摘要:
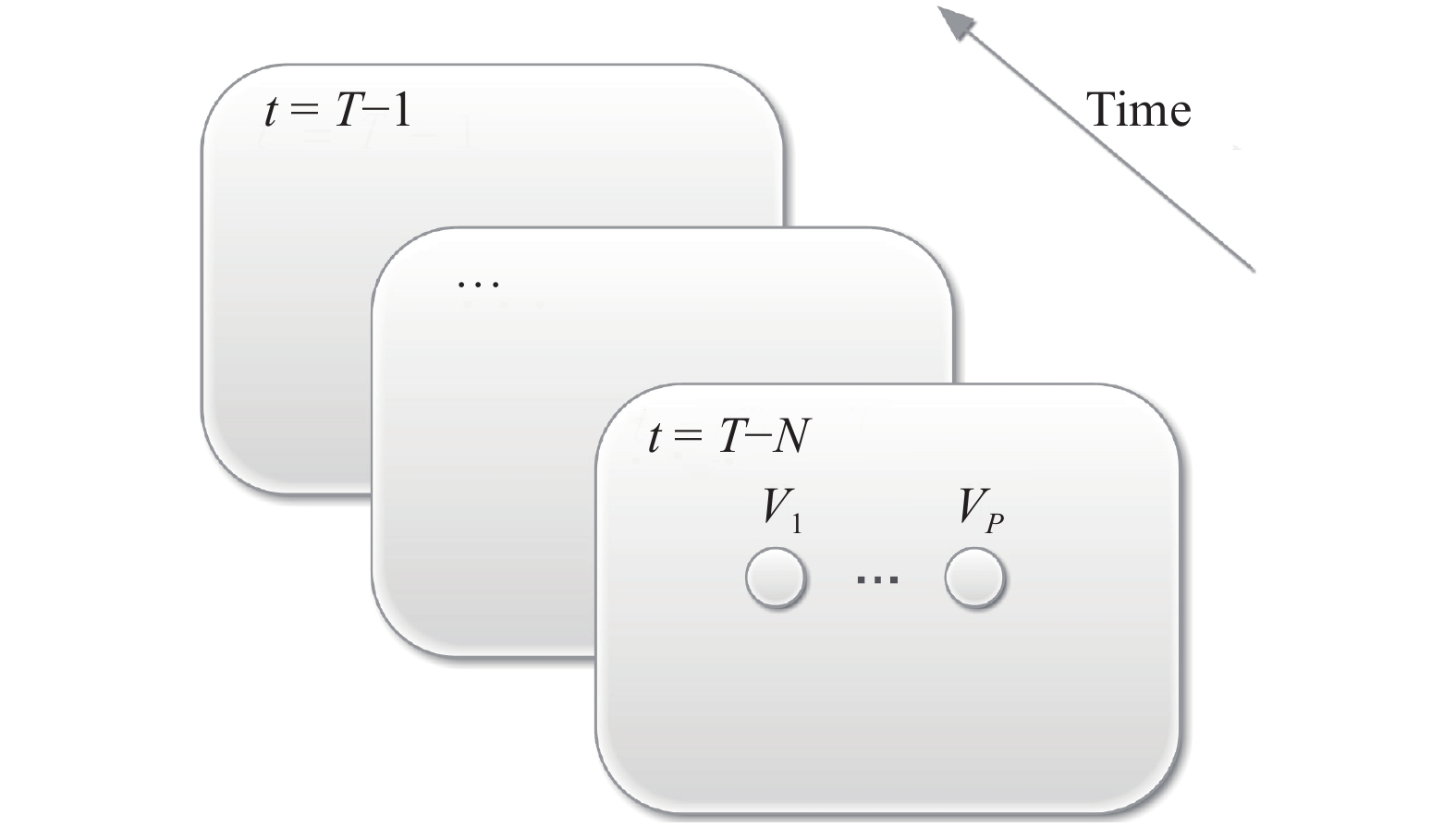
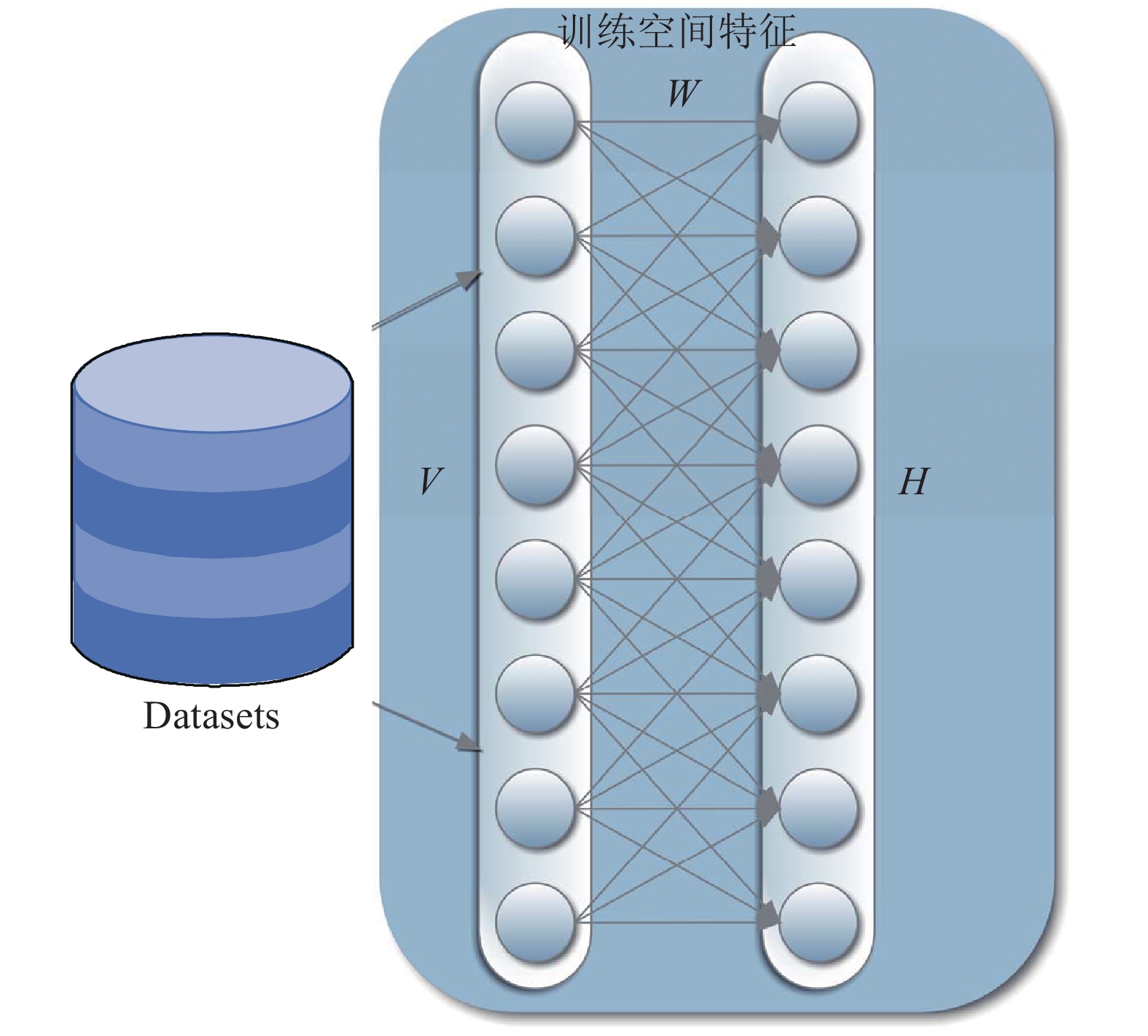
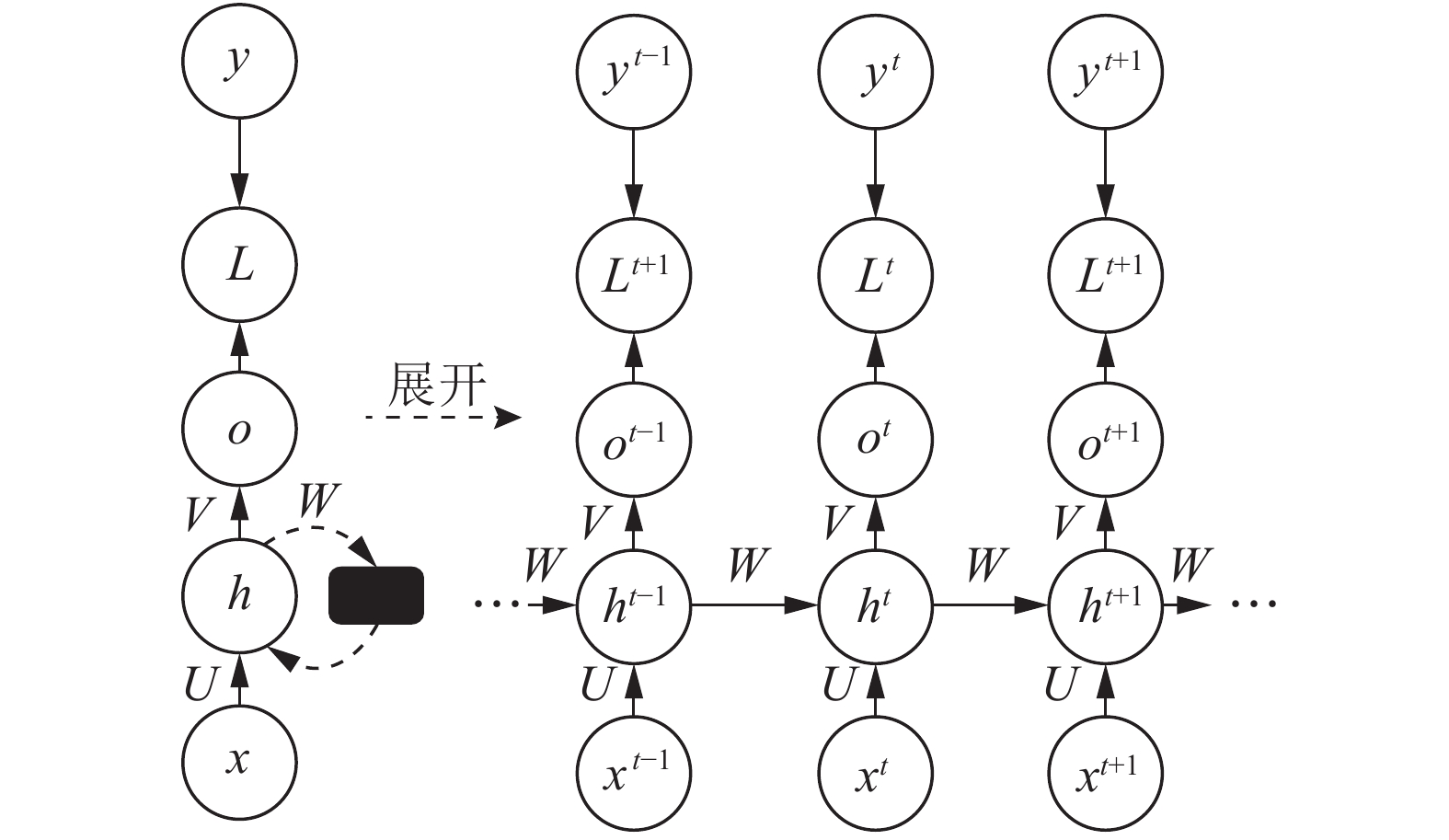
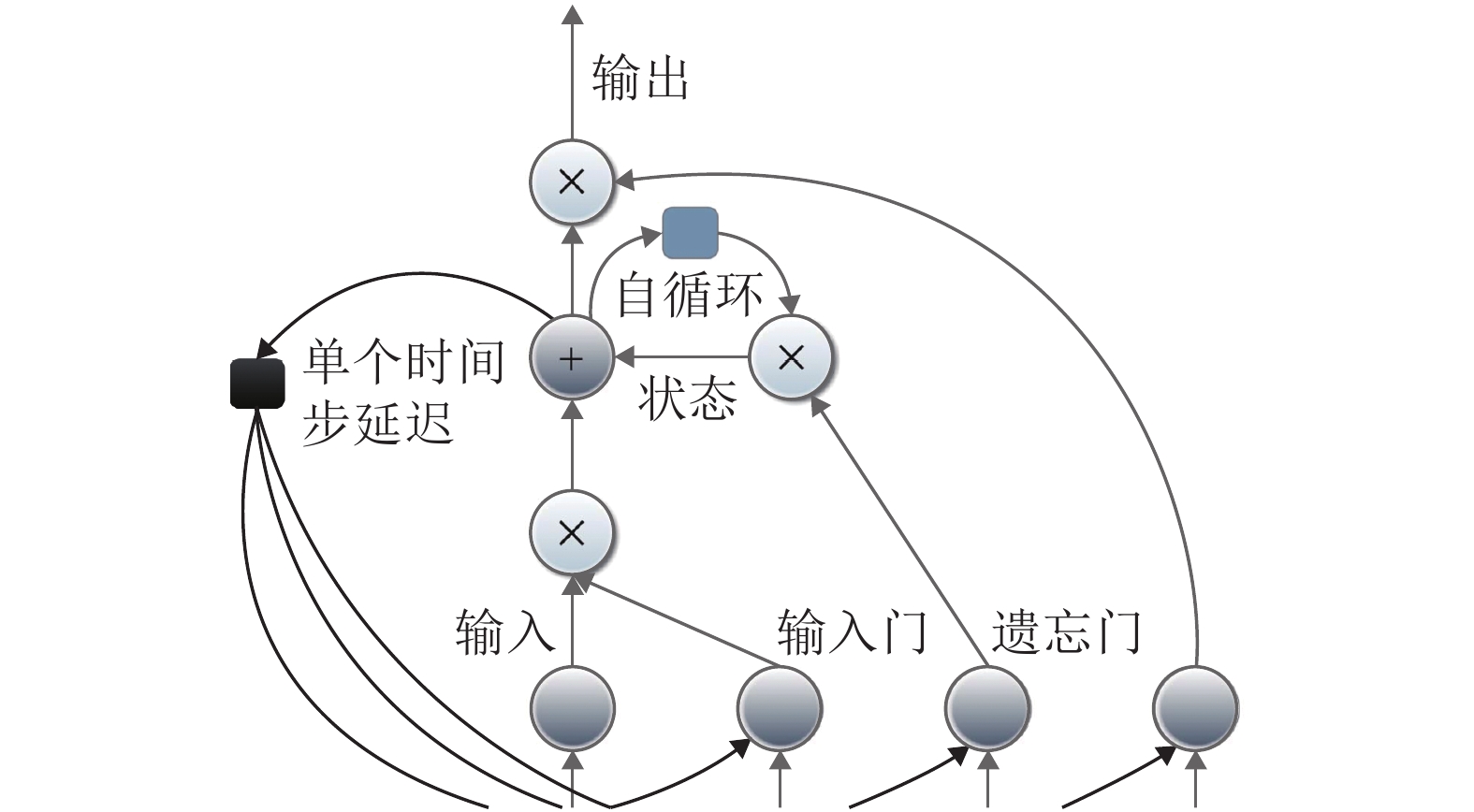
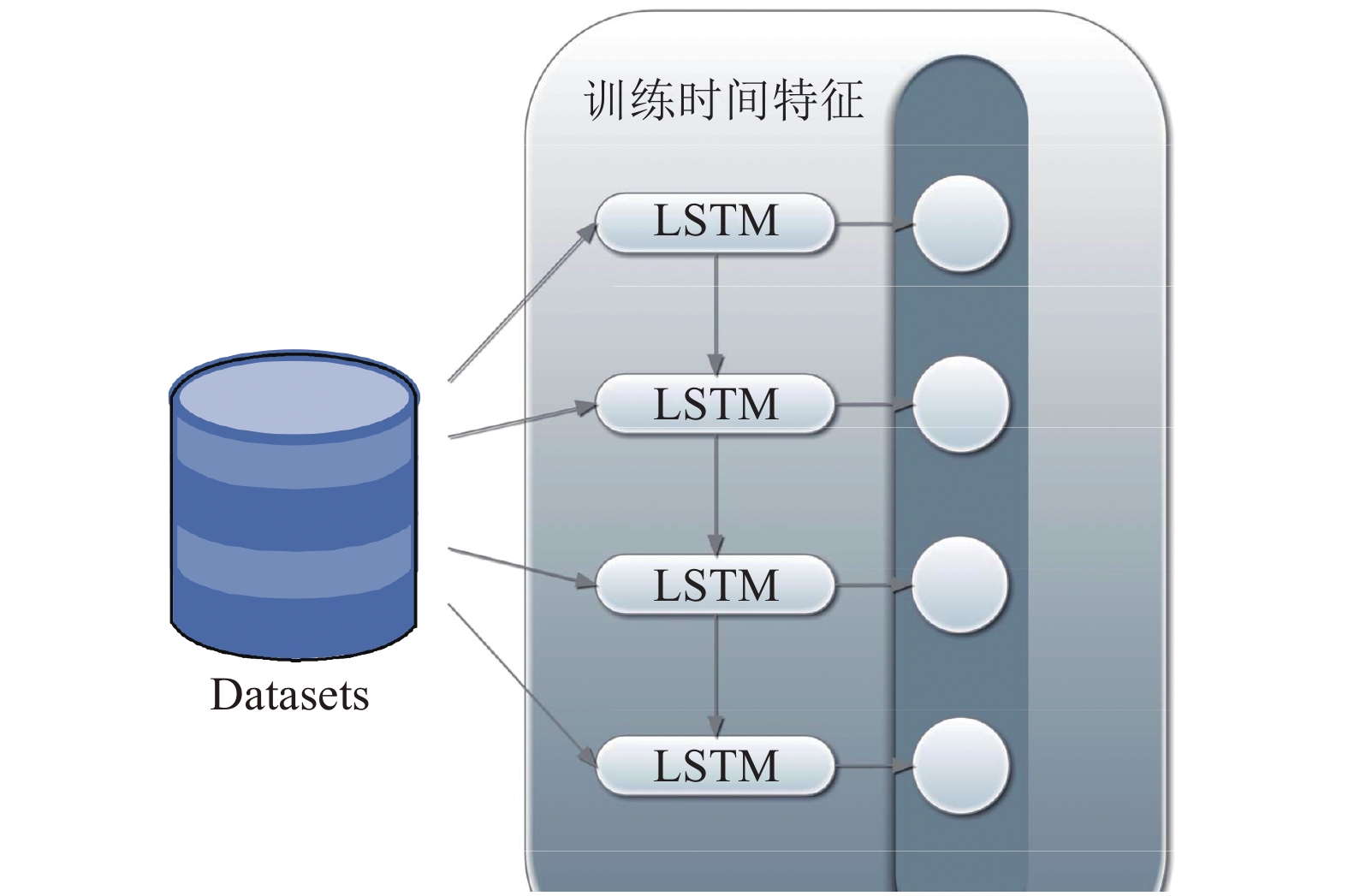
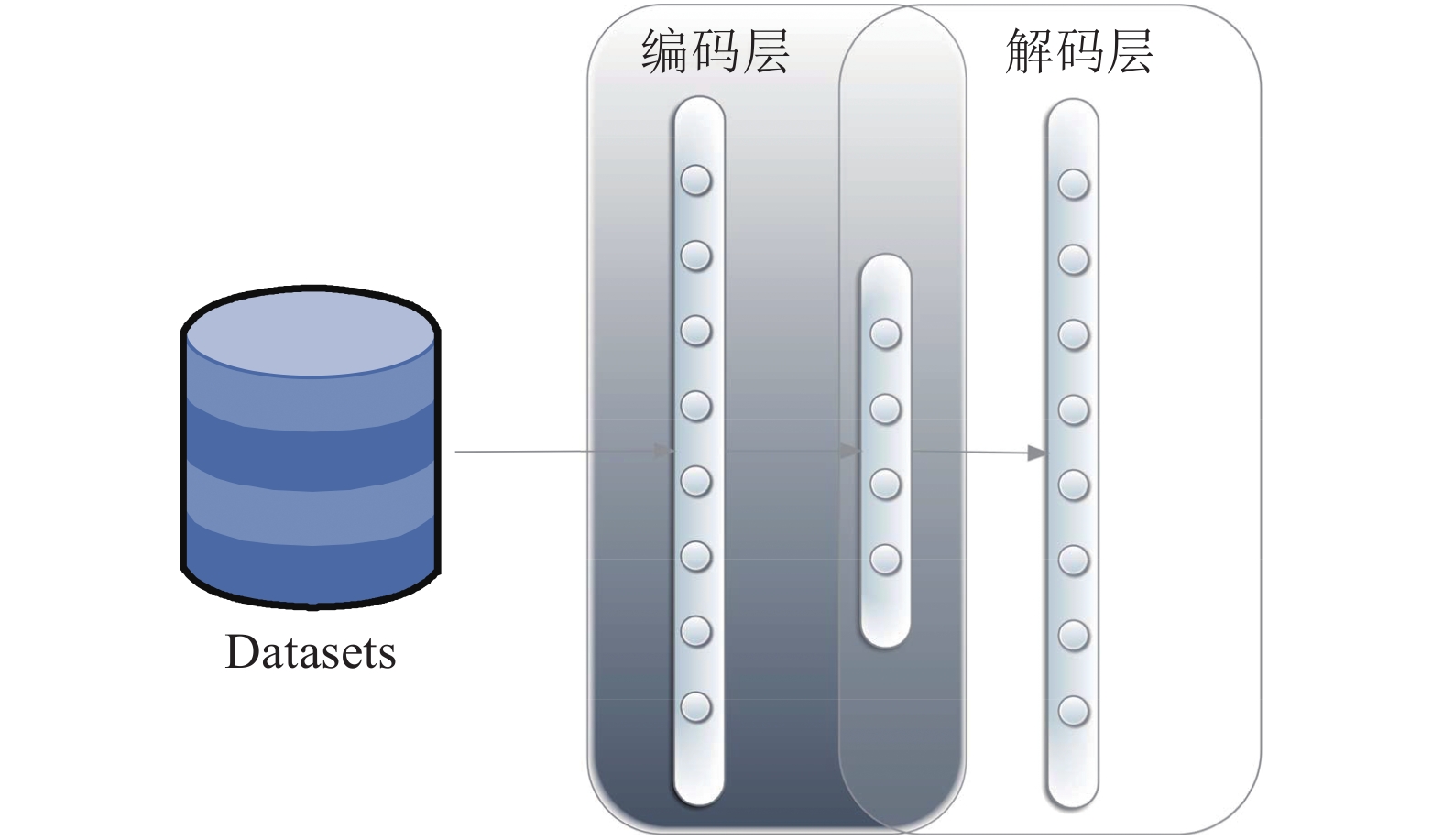
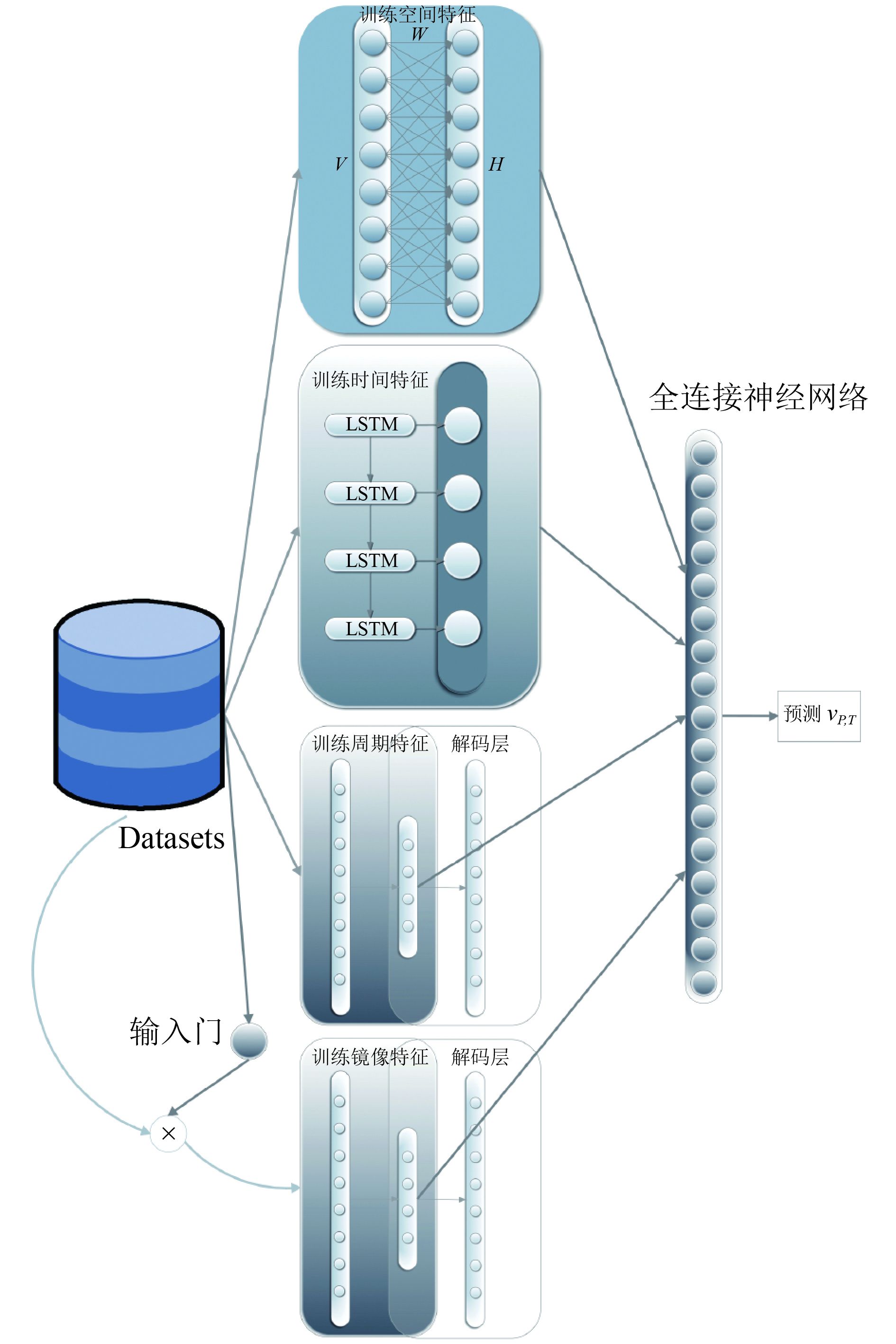
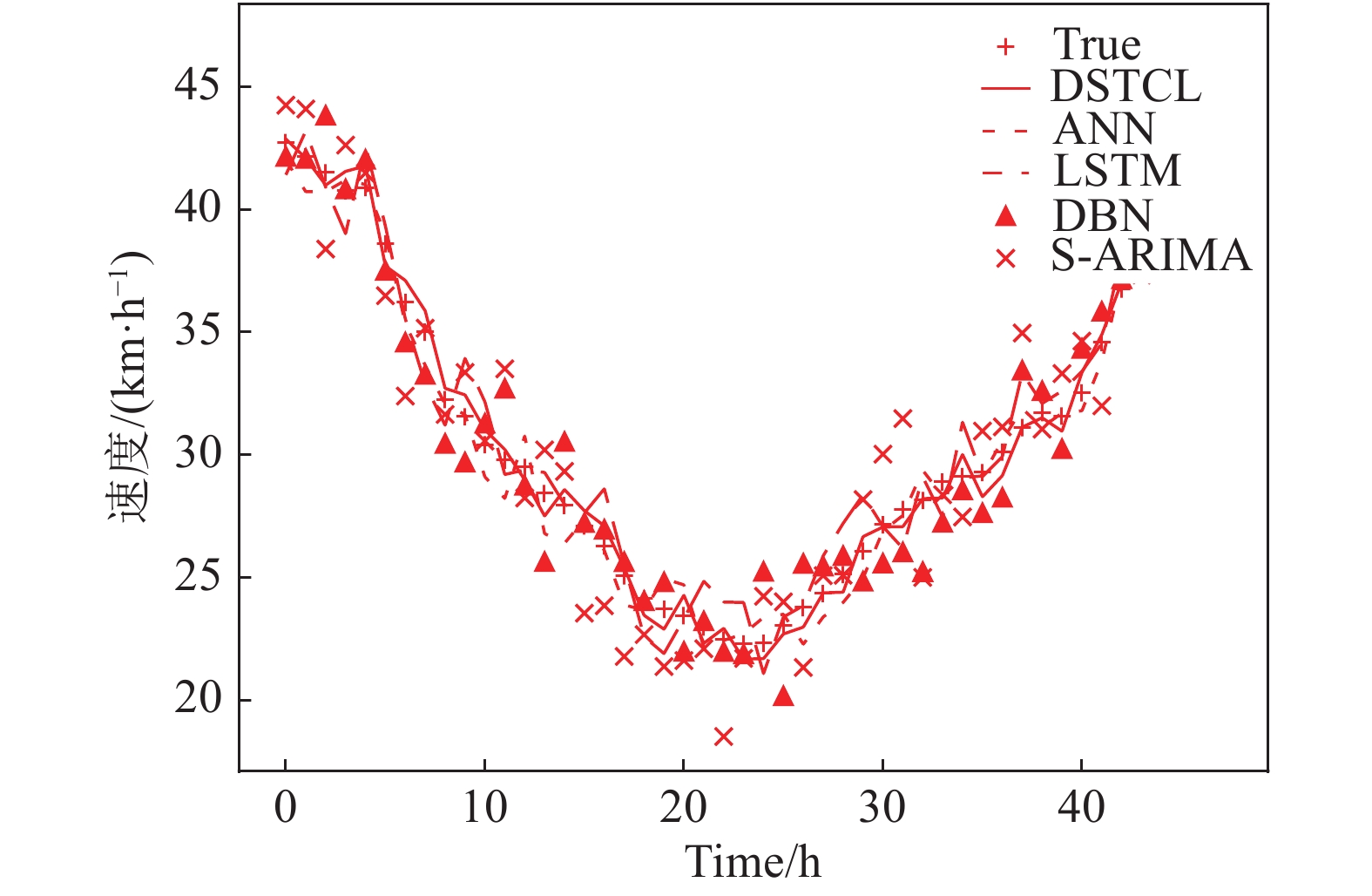
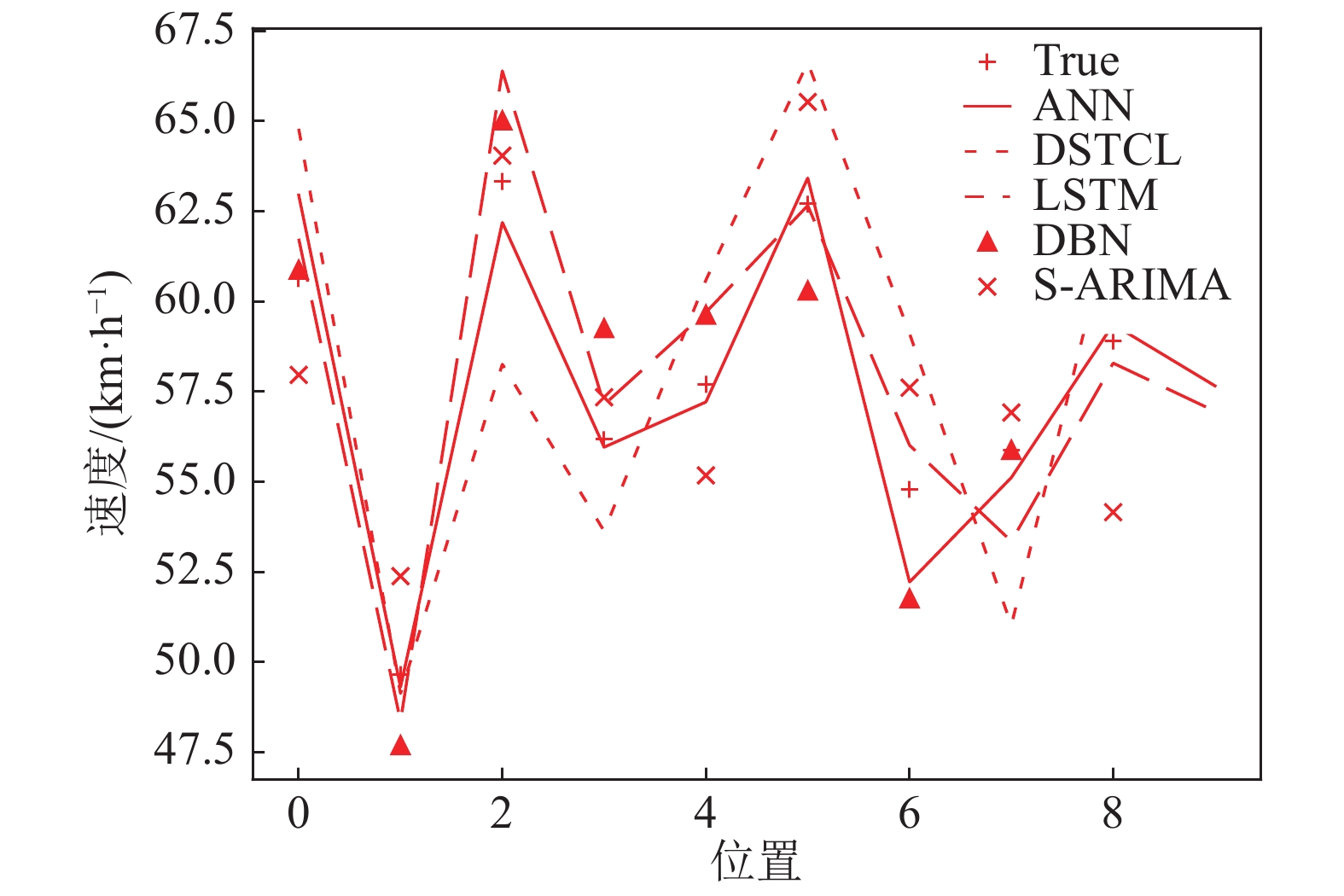
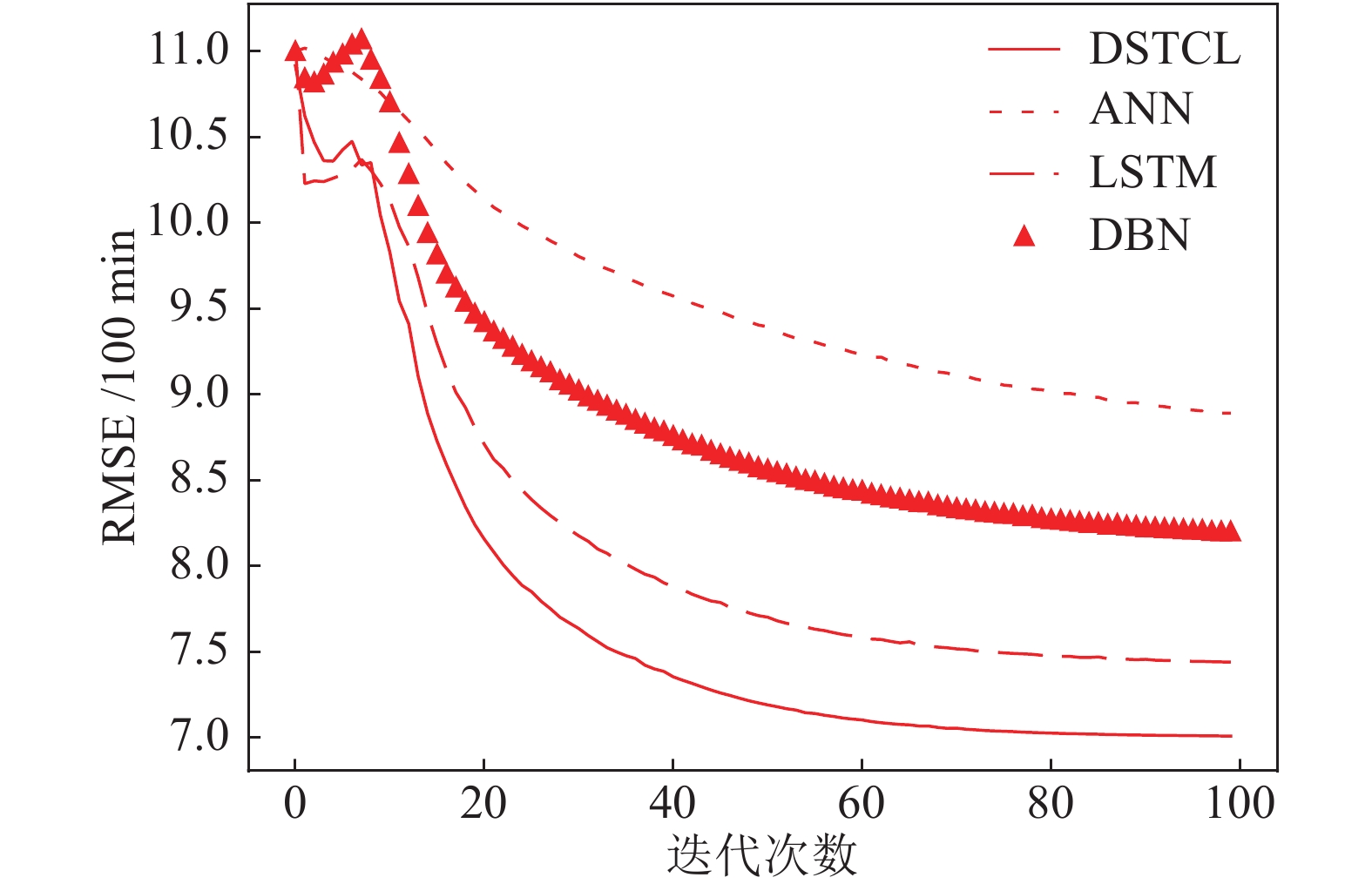
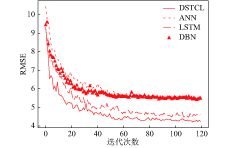
时空数据是包含时间和空间属性的数据类型. 研究时空数据需要设计时空数据模型, 用以处理数据与时间和空间的关系, 得到信息对象由于时间和空间改变而产生的行为状态变化的趋势. 交通信息数据是一类典型的时空数据. 由于交通网络的复杂性和多变性, 以及与时间和空间的强耦合性, 使得传统的系统仿真和数据分析方法不能有效地得到数据之间的关系. 本文通过对交通数据中临近空间属性信息的处理, 解决了由于传统时空数据模型只关注时间属性导致模型对短时间间隔数据预测能力不足的问题, 进而提高模型预测未来信息的能力. 本文提出一个全新的时空数据模型—深度卷积记忆网络. 深度卷积记忆网络是一个包含卷积神经网络和长短时间记忆网络的多元网络结构, 可以提取数据的时间和空间属性信息, 通过加入周期和镜像特征提取模块对网络进行修正. 通过对两类典型时空数据集的验证, 表明深度卷积记忆网络在预测短时间间隔的数据信息时, 相较于传统的时空数据模型, 不仅预测误差有了很大程度的降低, 而且模型的训练速度也得到提升.
时空数据是包含时间和空间属性的数据类型. 研究时空数据需要设计时空数据模型, 用以处理数据与时间和空间的关系, 得到信息对象由于时间和空间改变而产生的行为状态变化的趋势. 交通信息数据是一类典型的时空数据. 由于交通网络的复杂性和多变性, 以及与时间和空间的强耦合性, 使得传统的系统仿真和数据分析方法不能有效地得到数据之间的关系. 本文通过对交通数据中临近空间属性信息的处理, 解决了由于传统时空数据模型只关注时间属性导致模型对短时间间隔数据预测能力不足的问题, 进而提高模型预测未来信息的能力. 本文提出一个全新的时空数据模型—深度卷积记忆网络. 深度卷积记忆网络是一个包含卷积神经网络和长短时间记忆网络的多元网络结构, 可以提取数据的时间和空间属性信息, 通过加入周期和镜像特征提取模块对网络进行修正. 通过对两类典型时空数据集的验证, 表明深度卷积记忆网络在预测短时间间隔的数据信息时, 相较于传统的时空数据模型, 不仅预测误差有了很大程度的降低, 而且模型的训练速度也得到提升.

2020, 46(3): 463-470.
doi: 10.16383/j.aas.c190195
摘要:
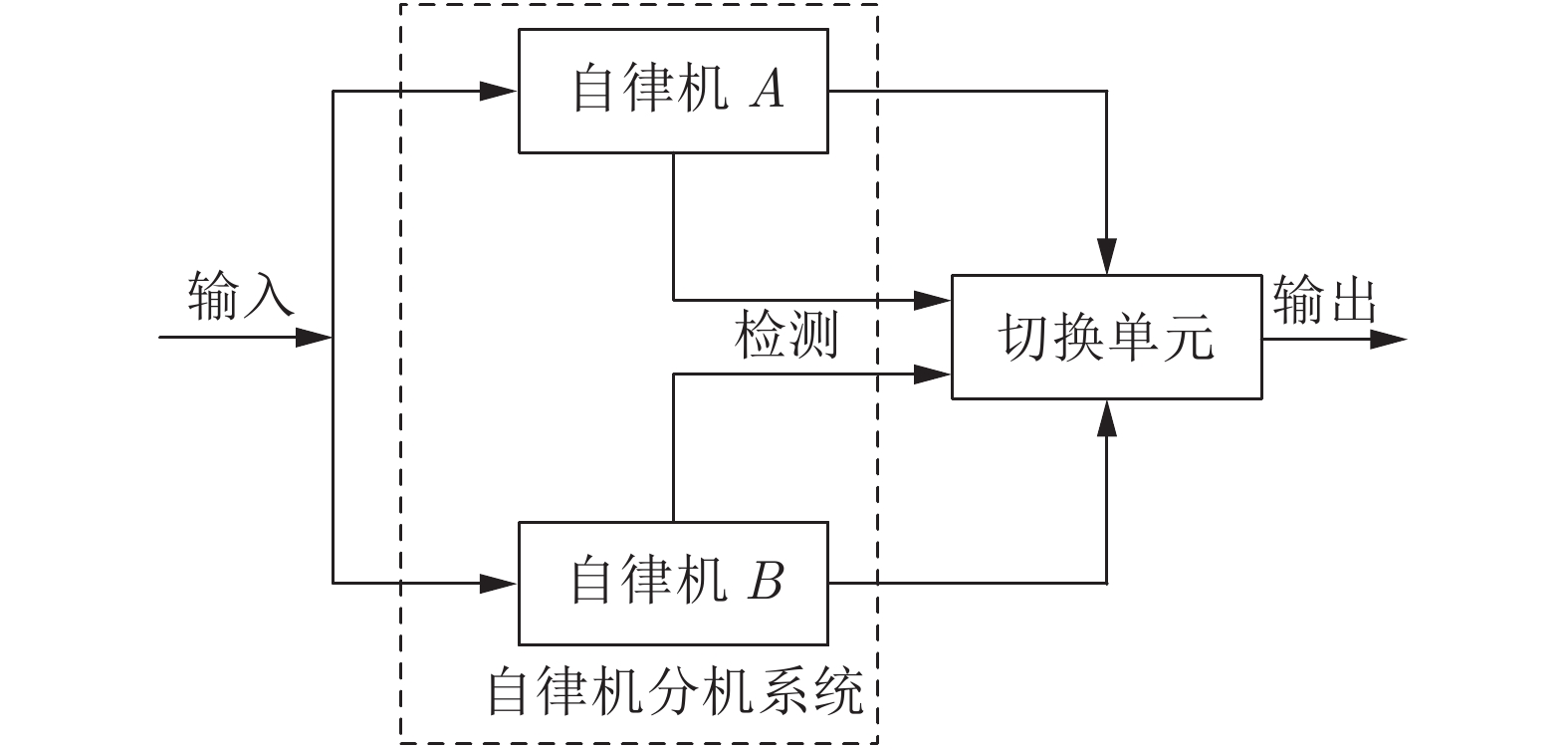
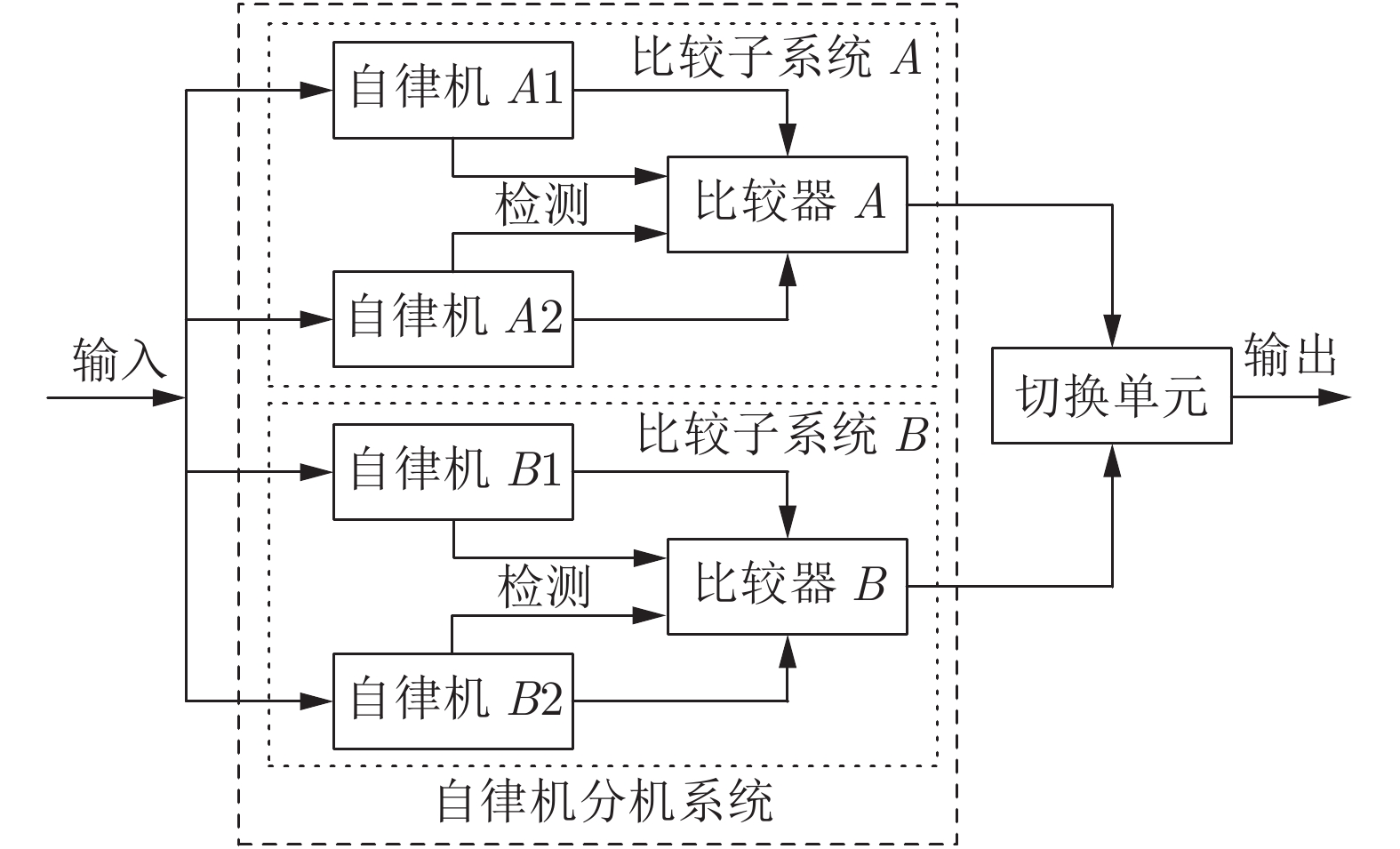
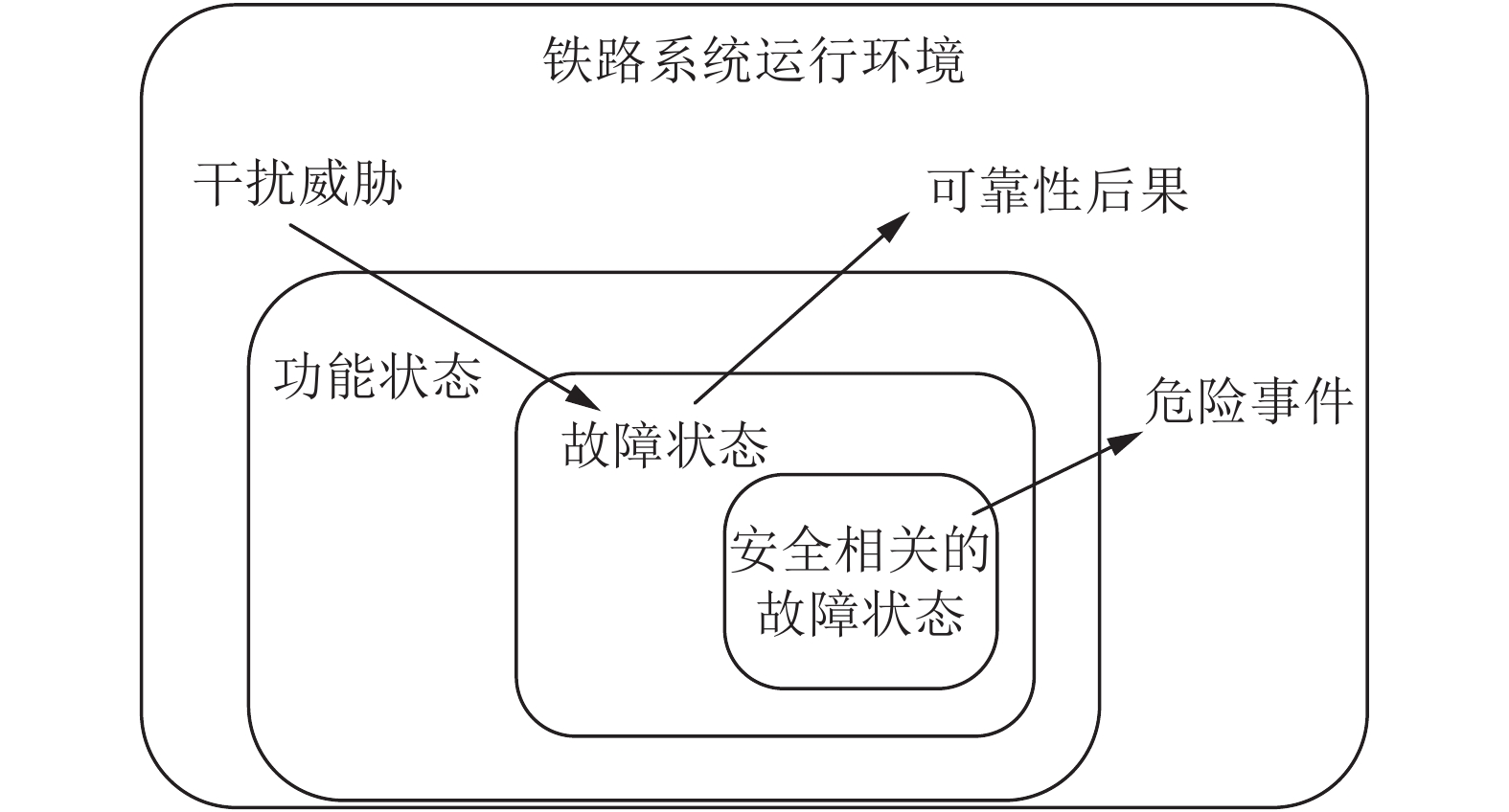
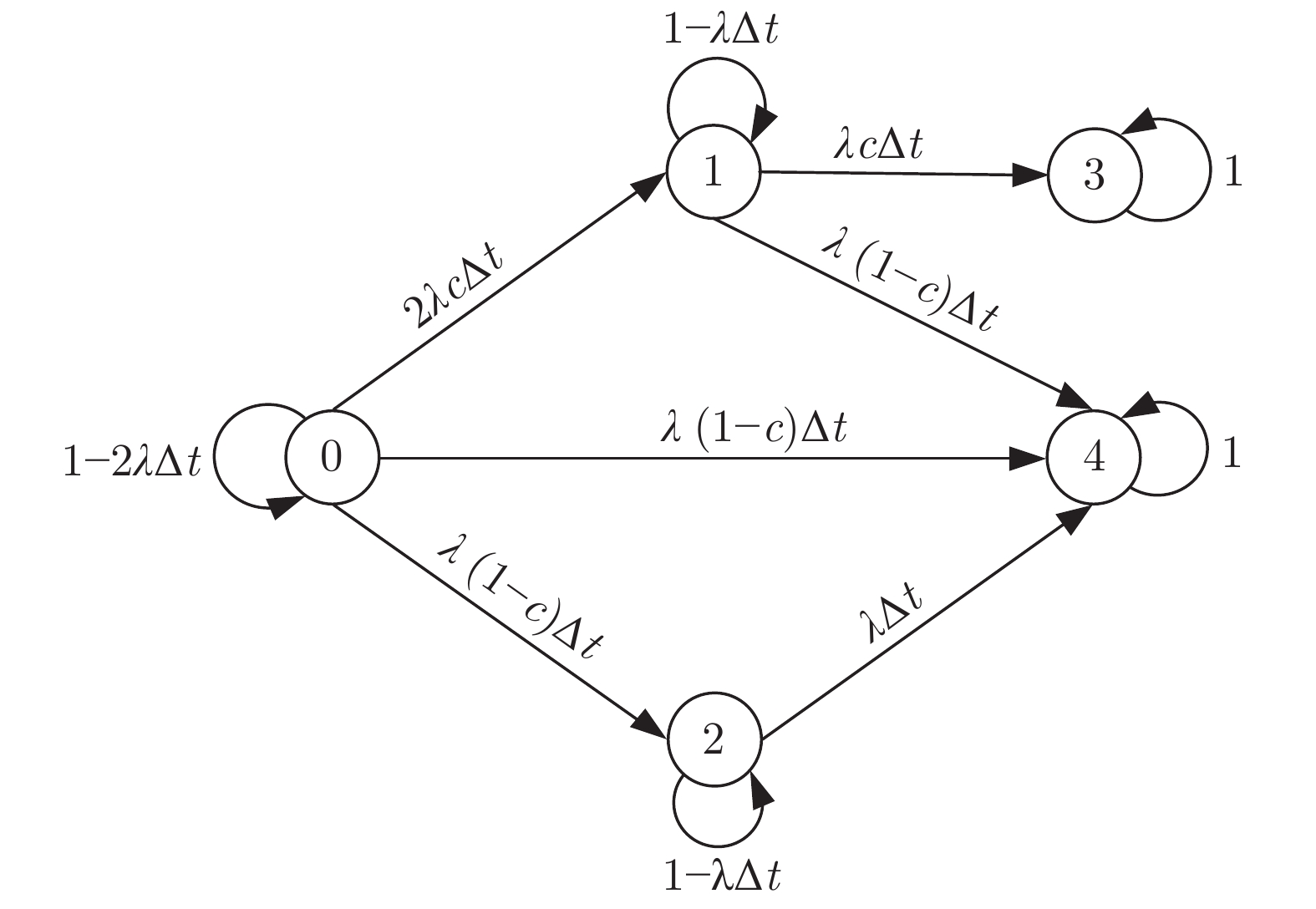
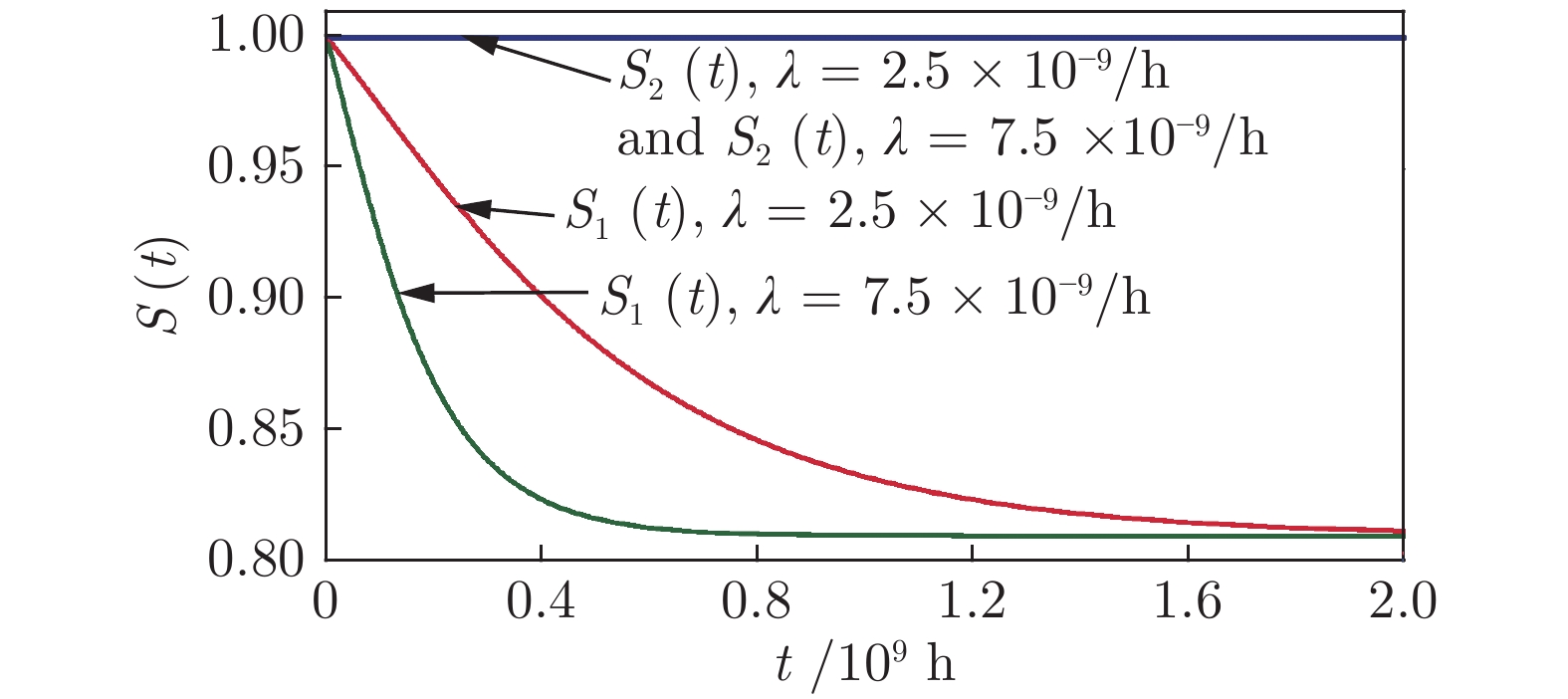
自律机系统是智能调度集中控制(Centralized traffic control, CTC)系统的核心, 其安全性和可靠性都至关重要. 首先分析了双机热备自律机系统和二乘二取二自律机系统的结构及工作原理; 然后综合考虑自律机分机的故障检出率和故障发生率等因素, 采用Markov模型, 构建了两个系统的安全度和可靠度模型. MATLAB仿真结果表明, 双机热备自律机系统的可靠性高于二乘二取二自律机系统的, 但双机热备自律机系统的安全度远低于二乘二取二自律机系统的, 因此二乘二取二自律机系统更能保障CTC系统的安全.
自律机系统是智能调度集中控制(Centralized traffic control, CTC)系统的核心, 其安全性和可靠性都至关重要. 首先分析了双机热备自律机系统和二乘二取二自律机系统的结构及工作原理; 然后综合考虑自律机分机的故障检出率和故障发生率等因素, 采用Markov模型, 构建了两个系统的安全度和可靠度模型. MATLAB仿真结果表明, 双机热备自律机系统的可靠性高于二乘二取二自律机系统的, 但双机热备自律机系统的安全度远低于二乘二取二自律机系统的, 因此二乘二取二自律机系统更能保障CTC系统的安全.


2020, 46(3): 471-481.
doi: 10.16383/j.aas.c190200
摘要:
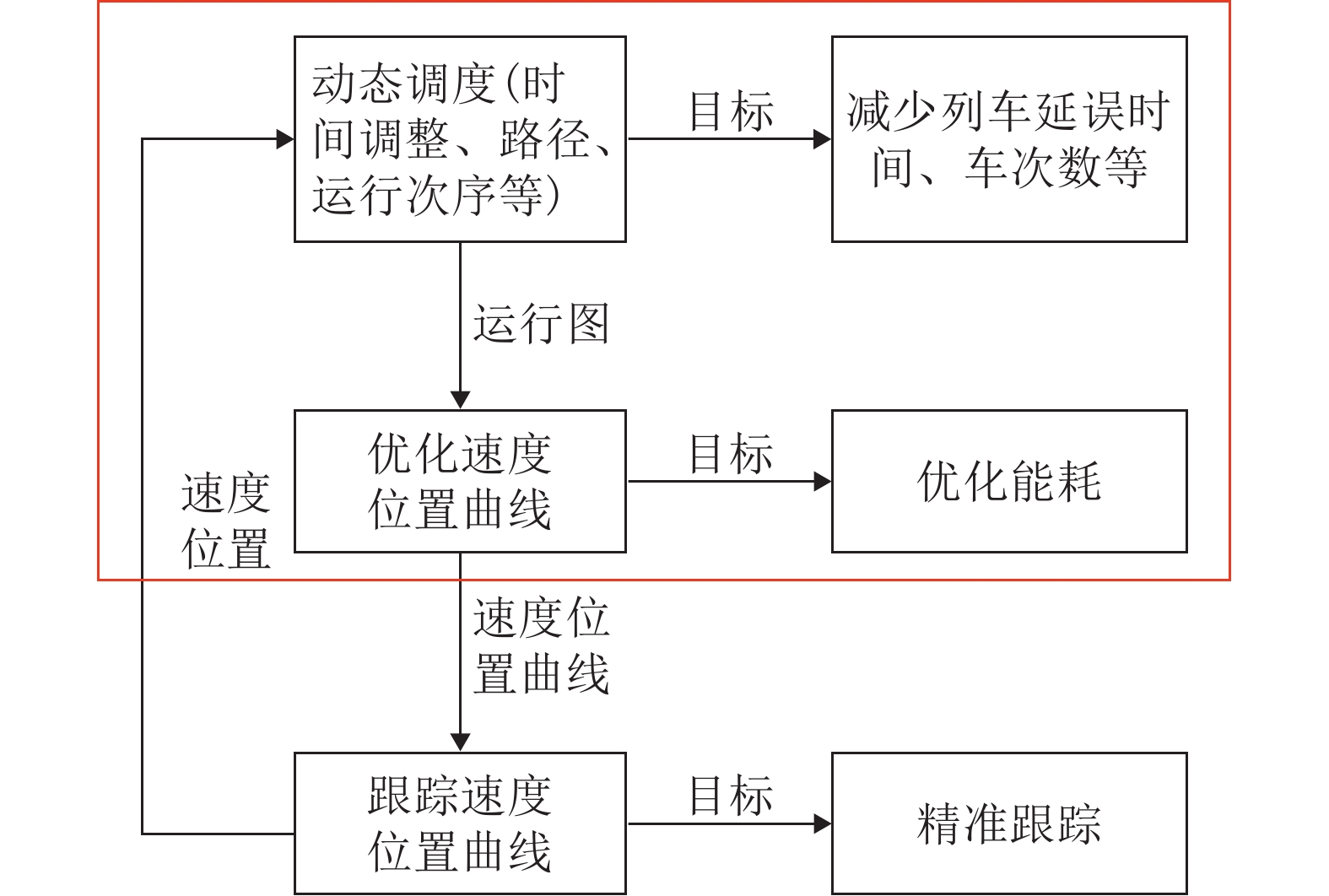
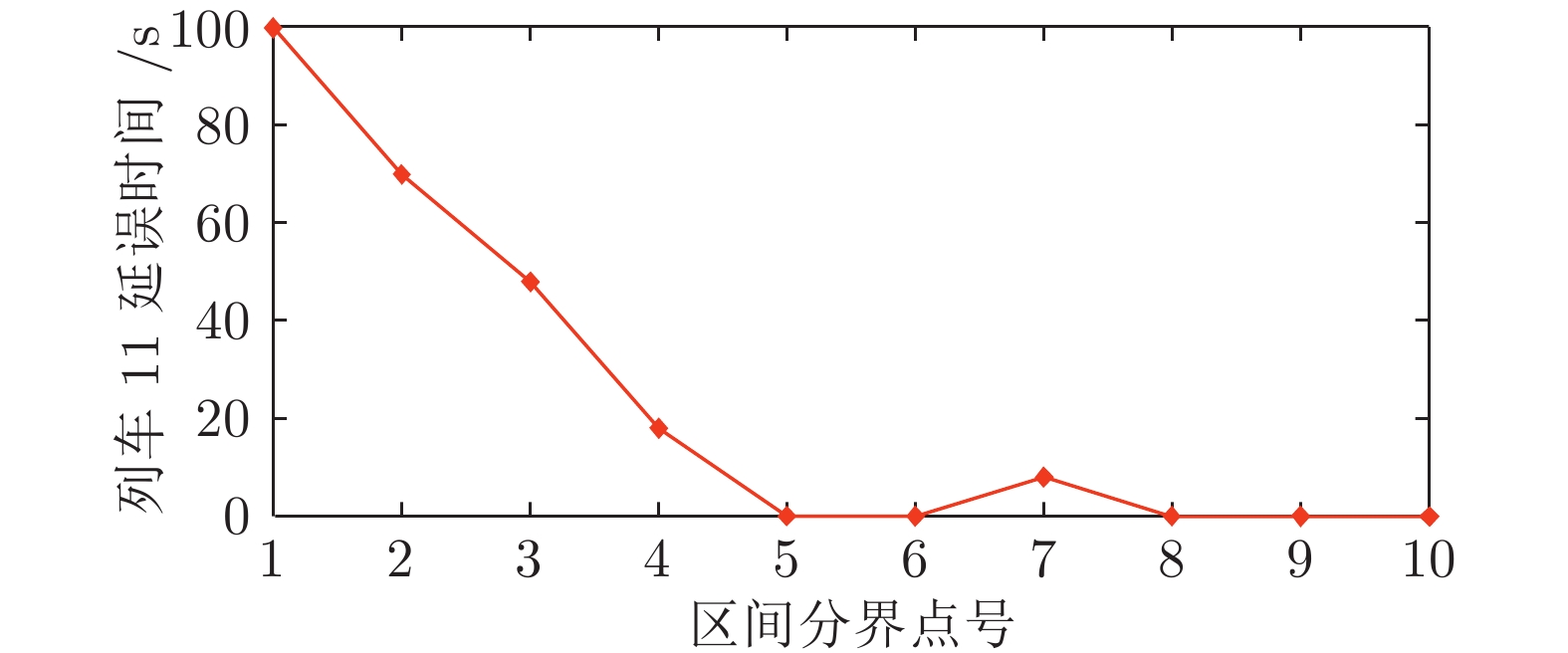
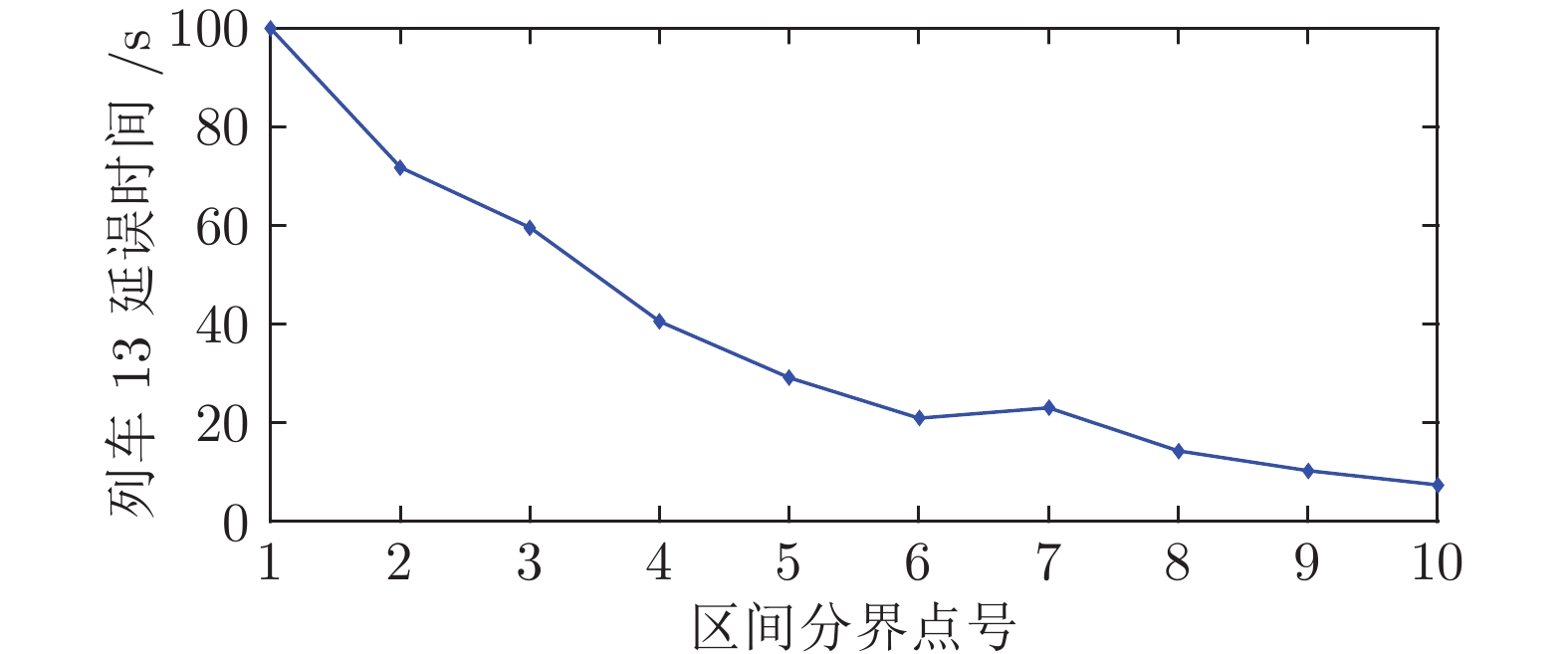
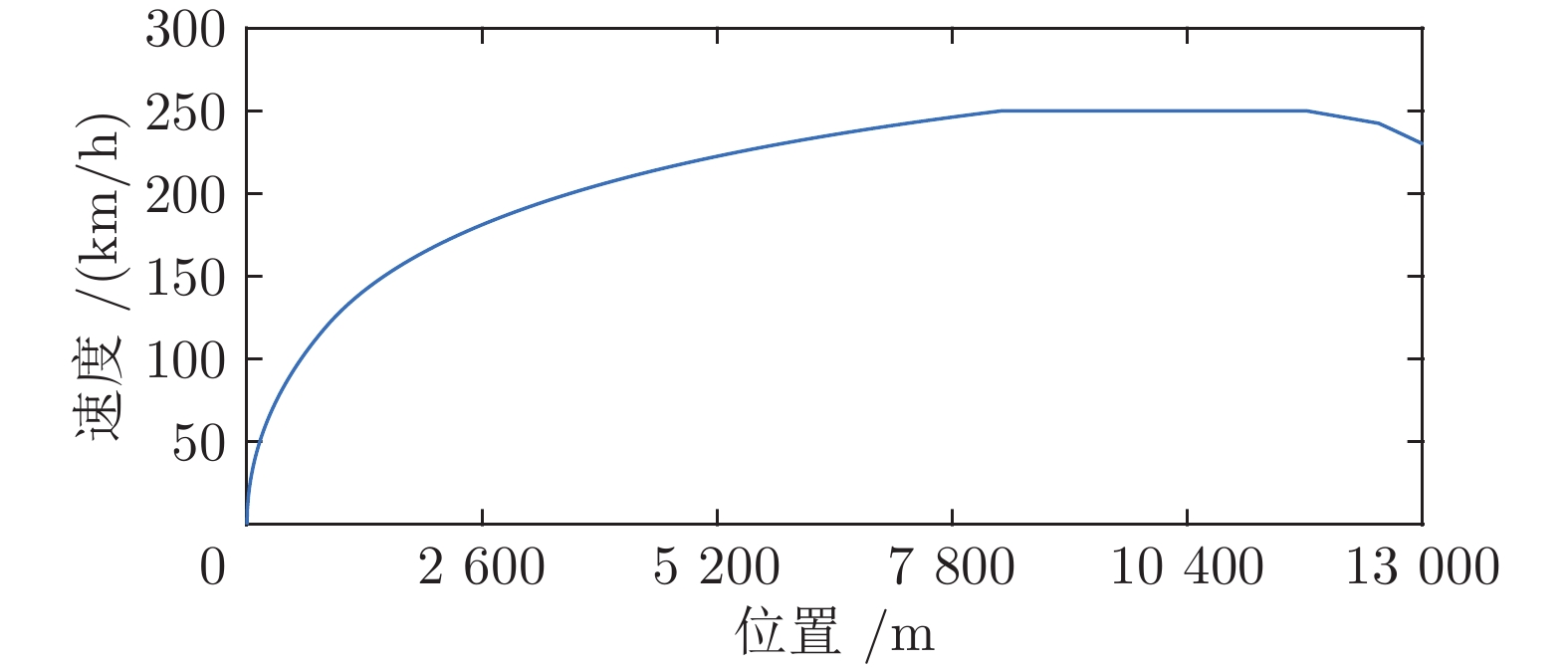
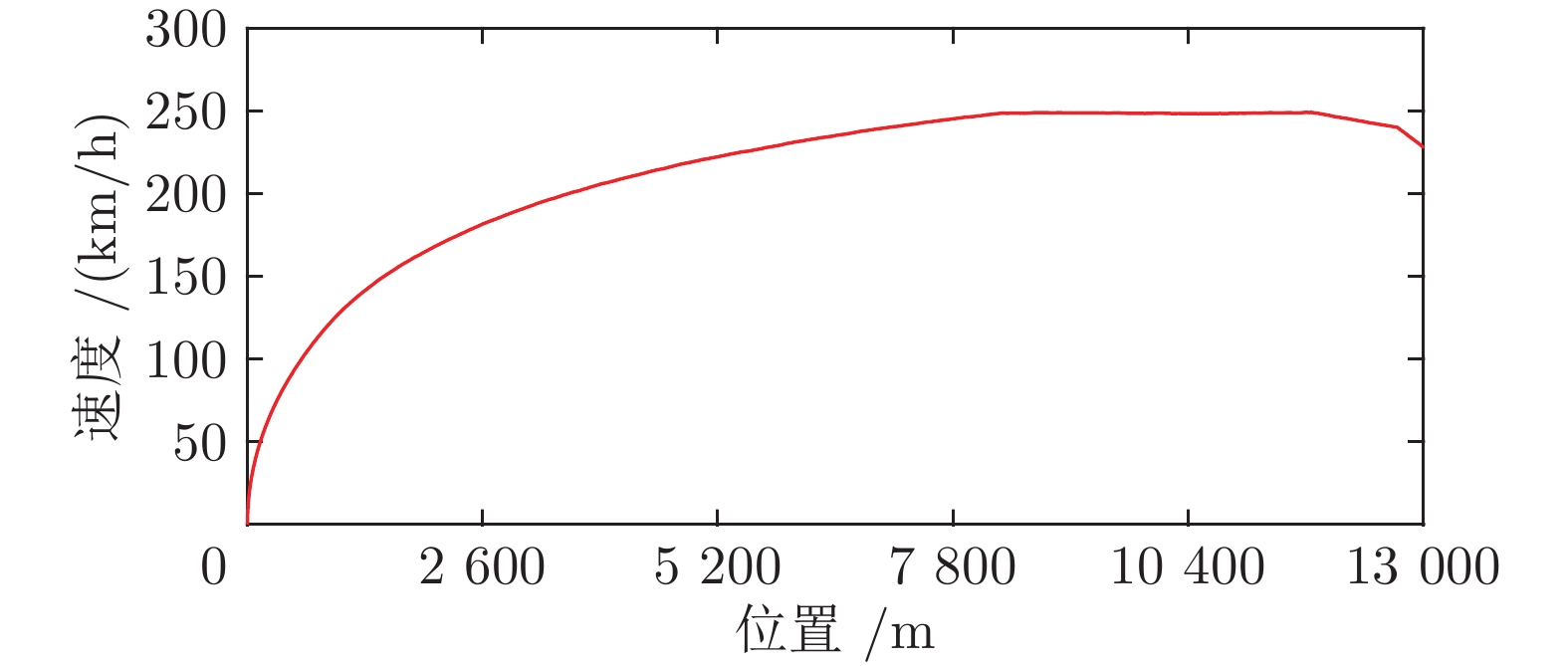
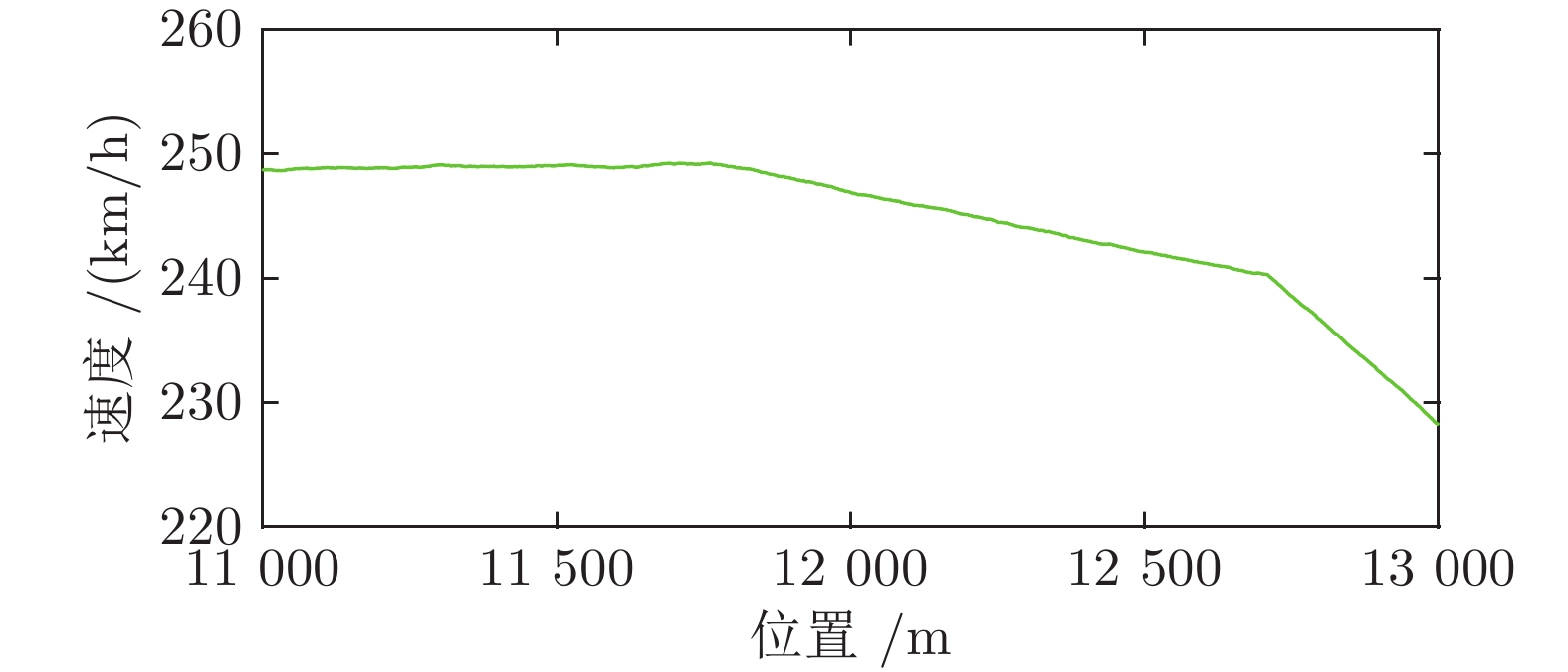
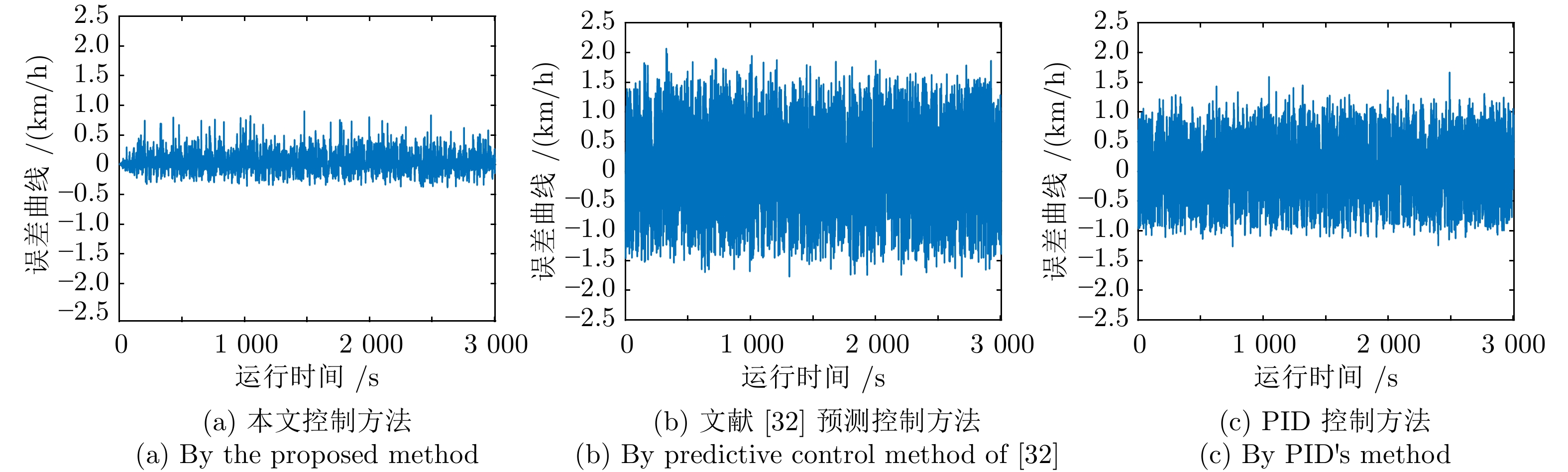
提出了一种高速列车运行时间与节能协同优化方法. 针对由动态调度层、优化控制层、跟踪控制层组成的列车运行控制与动态调度一体化结构, 设计了面向动态调度层和优化控制层的列车运行时间调整策略和节能速度位置曲线. 基于高速铁路闭塞区间, 建立了列车 − 区间模型和列车速度曲线节能优化模型. 利用模型预测控制方法对列车区间运行时间进行调整, 优化列车总延误时间; 根据调整后的区间运行时间设计列车运行优化速度位置曲线, 减少列车运行能耗. 仿真算例验证了设计的运行时间与节能协同优化策略的有效性.
提出了一种高速列车运行时间与节能协同优化方法. 针对由动态调度层、优化控制层、跟踪控制层组成的列车运行控制与动态调度一体化结构, 设计了面向动态调度层和优化控制层的列车运行时间调整策略和节能速度位置曲线. 基于高速铁路闭塞区间, 建立了列车 − 区间模型和列车速度曲线节能优化模型. 利用模型预测控制方法对列车区间运行时间进行调整, 优化列车总延误时间; 根据调整后的区间运行时间设计列车运行优化速度位置曲线, 减少列车运行能耗. 仿真算例验证了设计的运行时间与节能协同优化策略的有效性.

2020, 46(3): 482-494.
doi: 10.16383/j.aas.c190084
摘要:
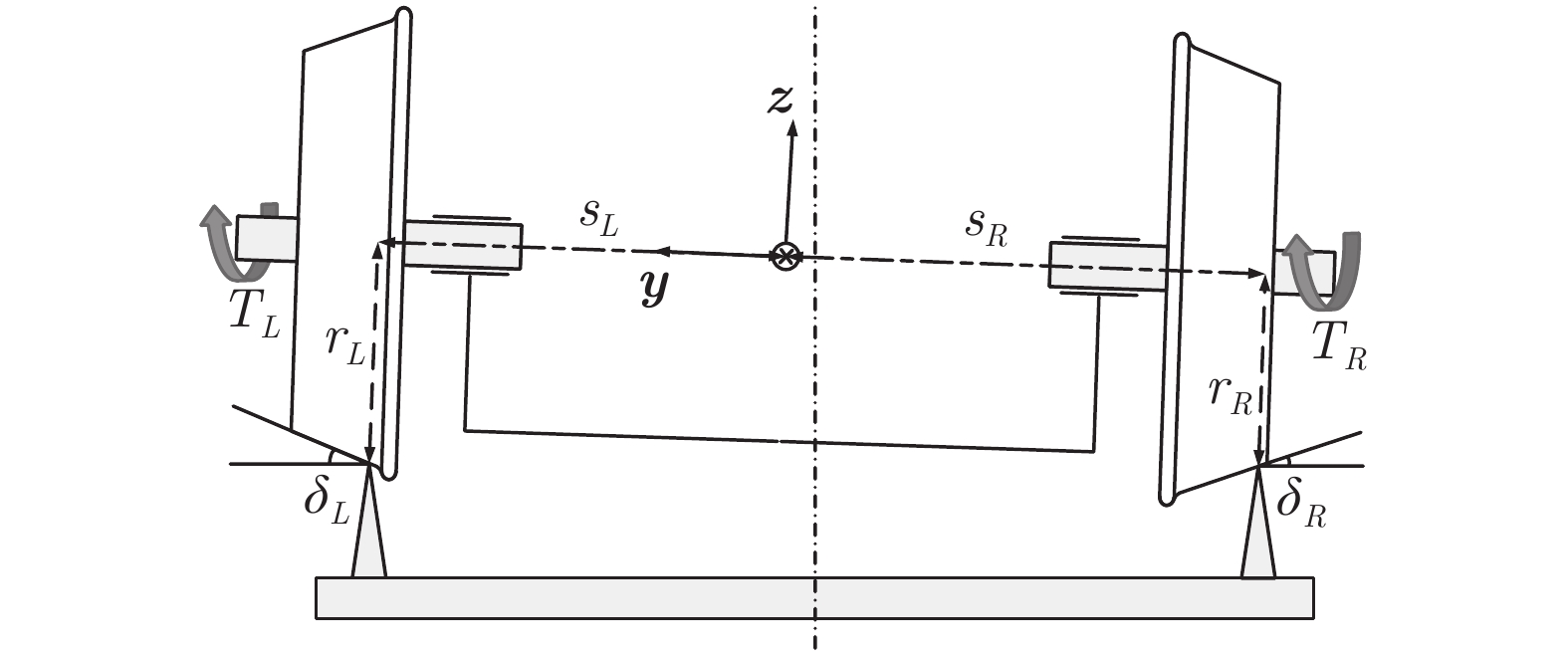
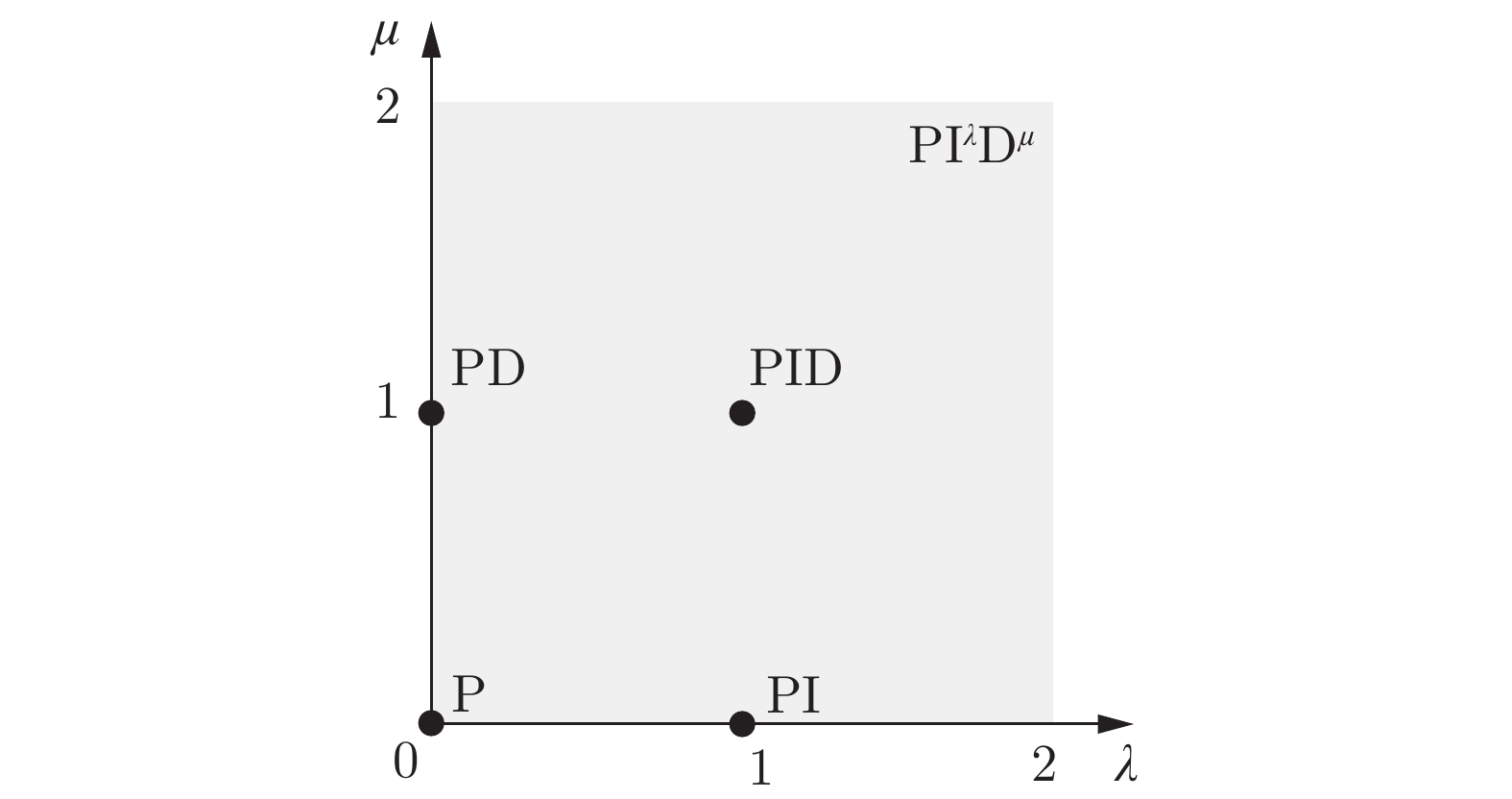
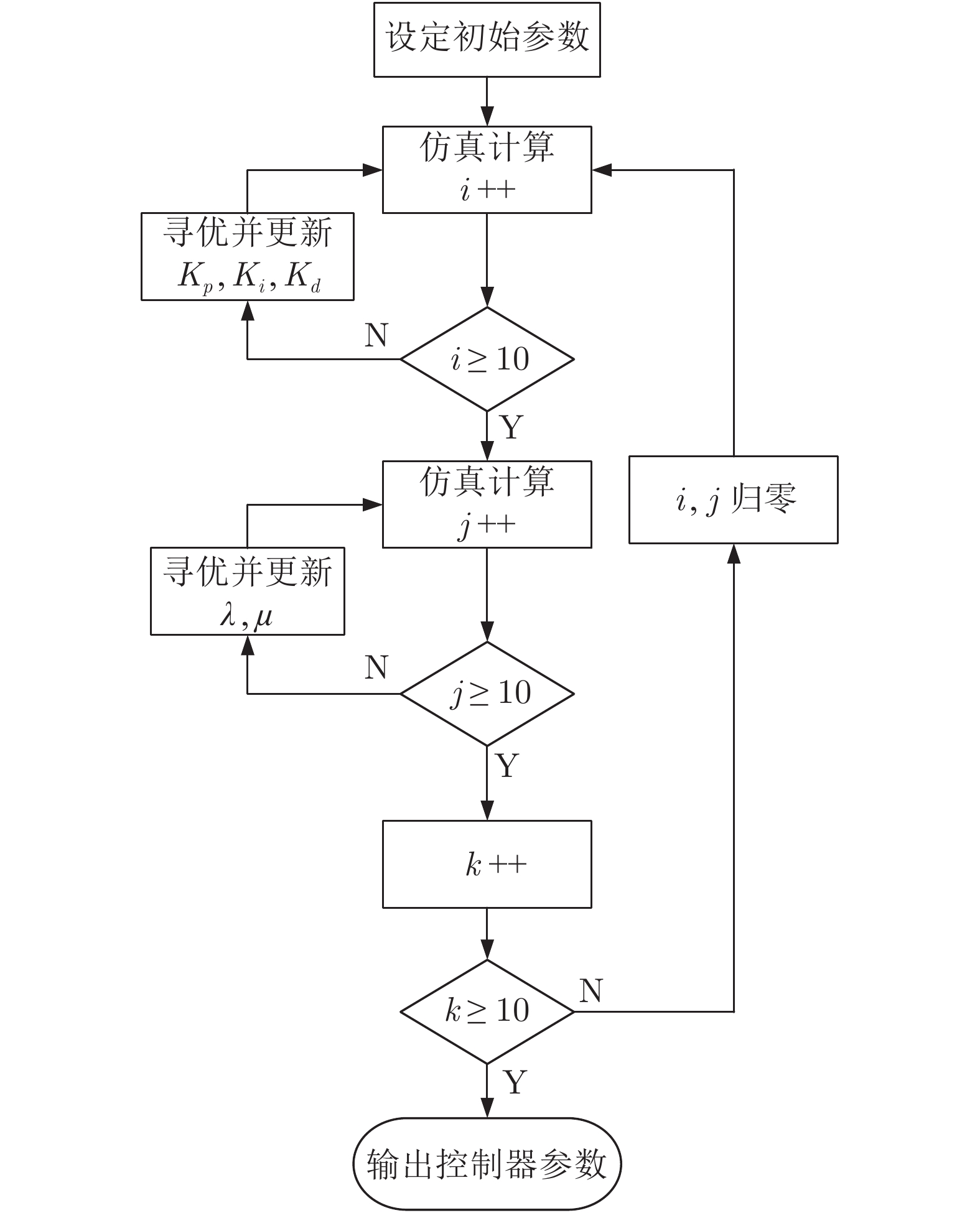
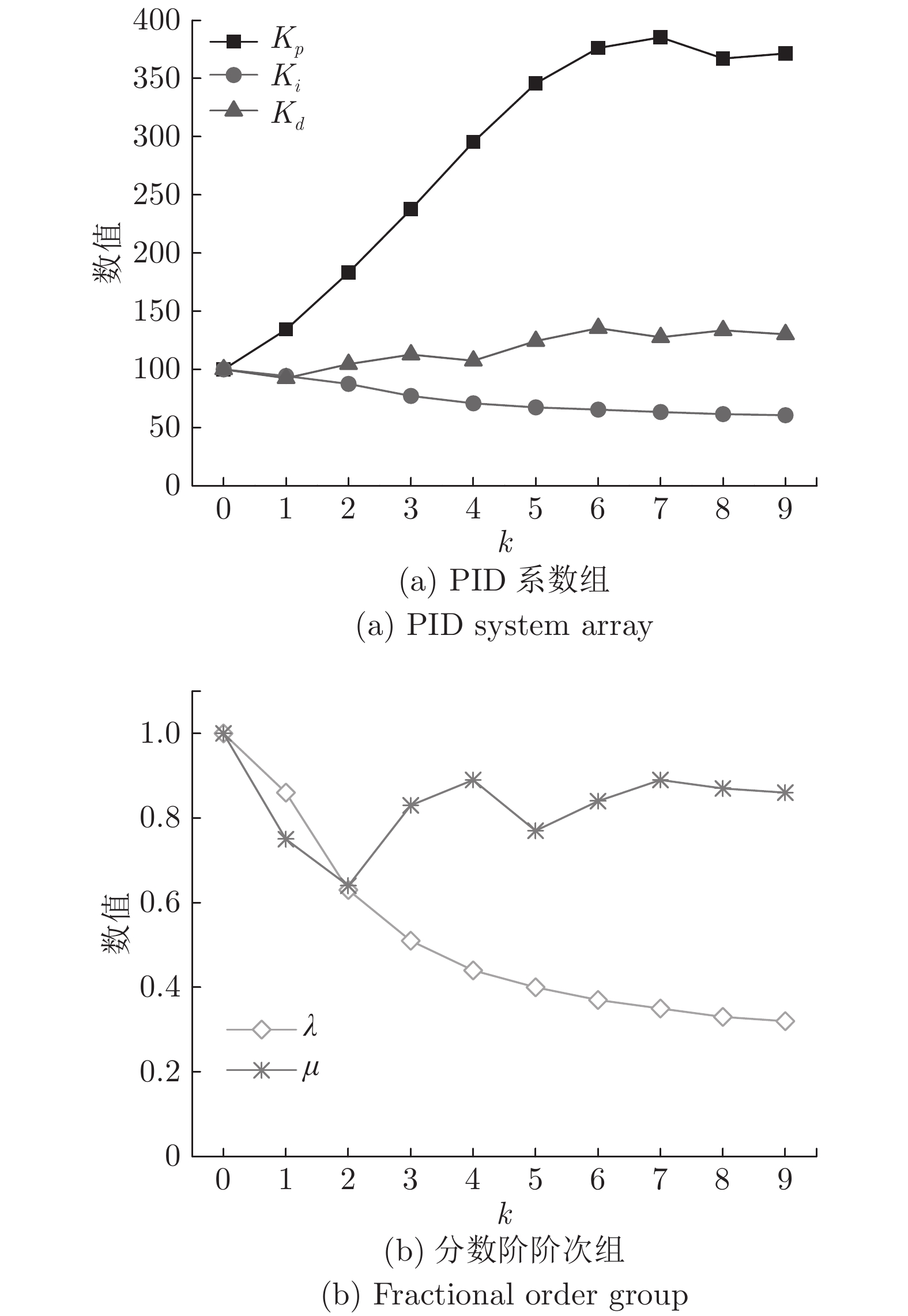
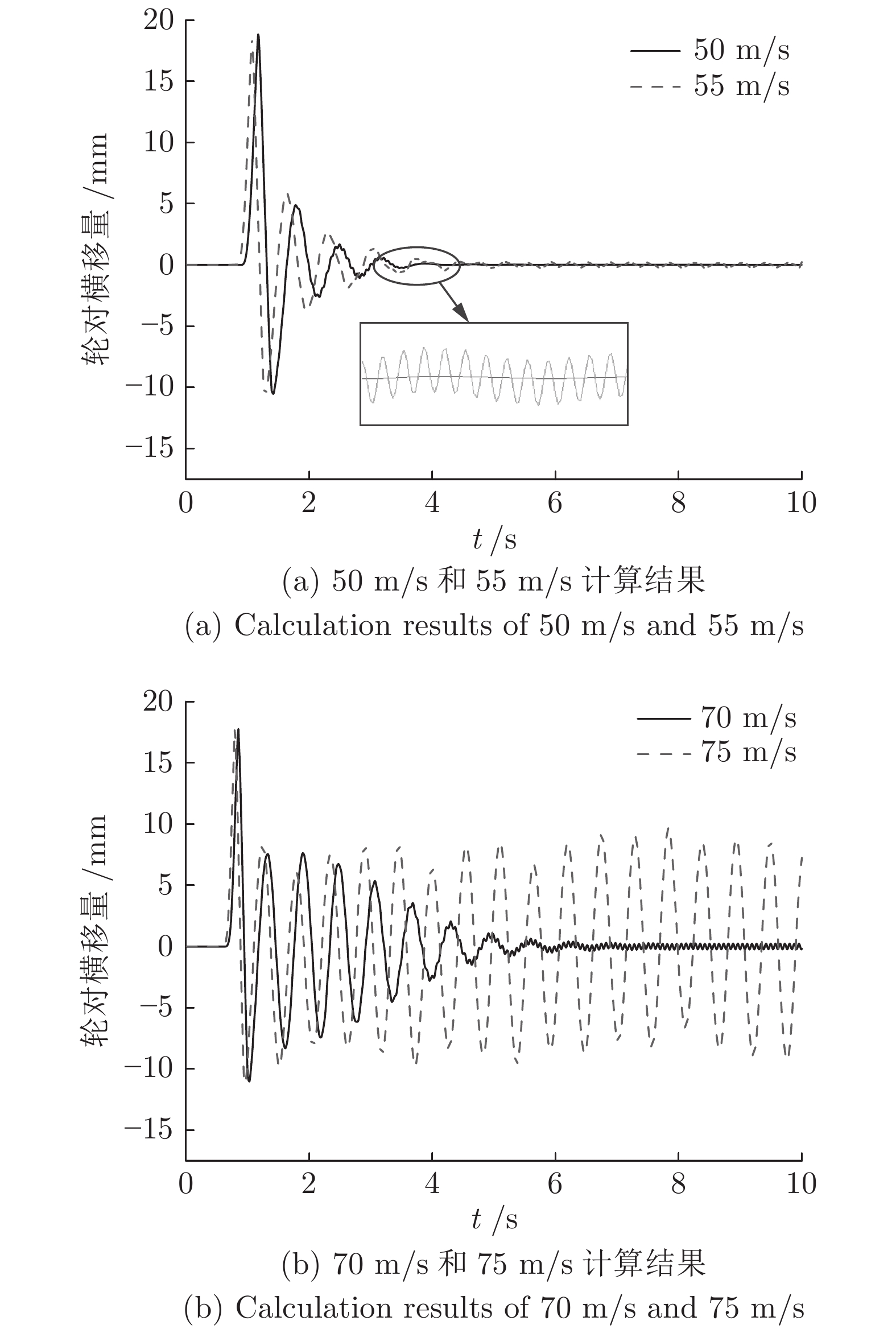
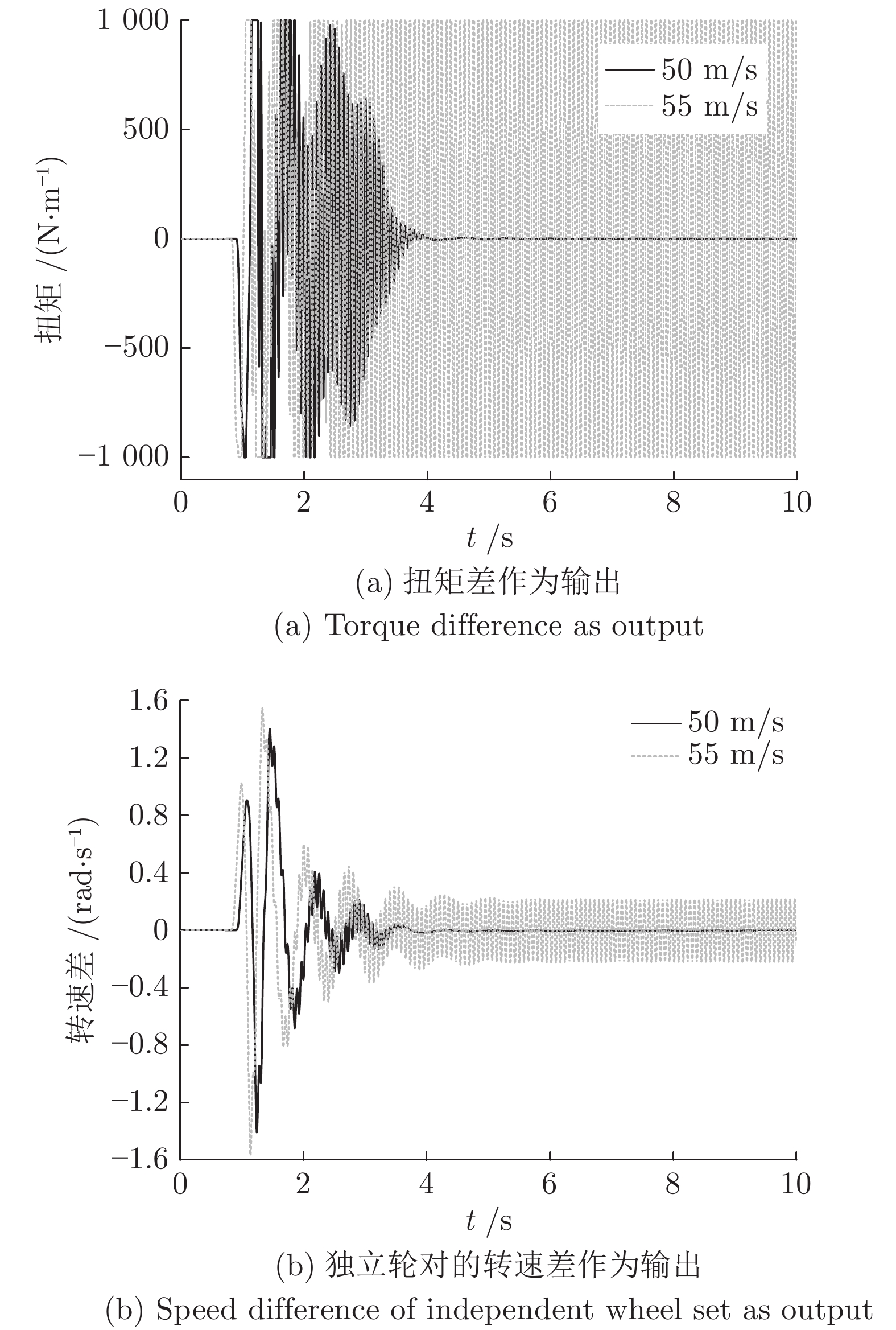
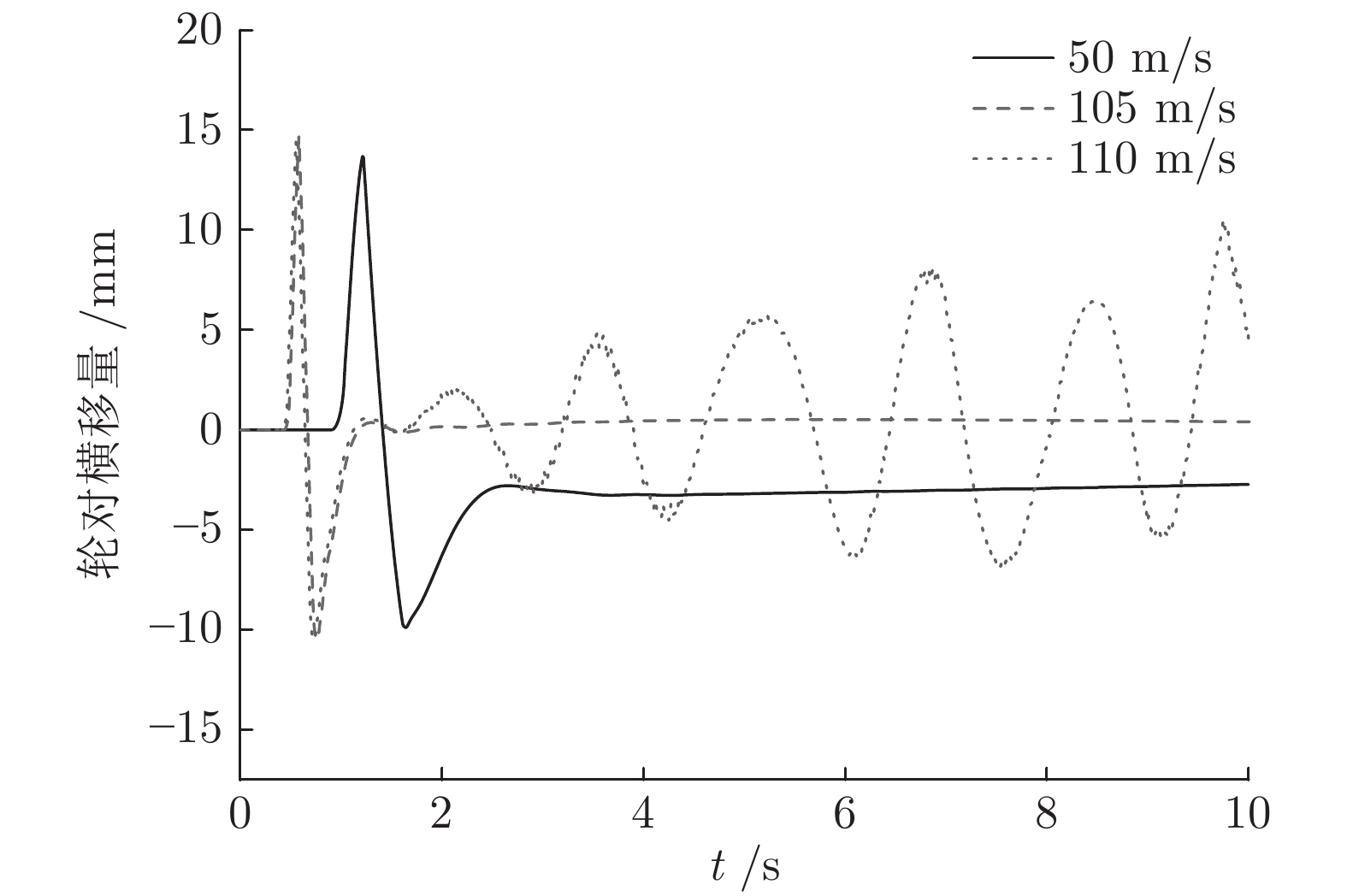
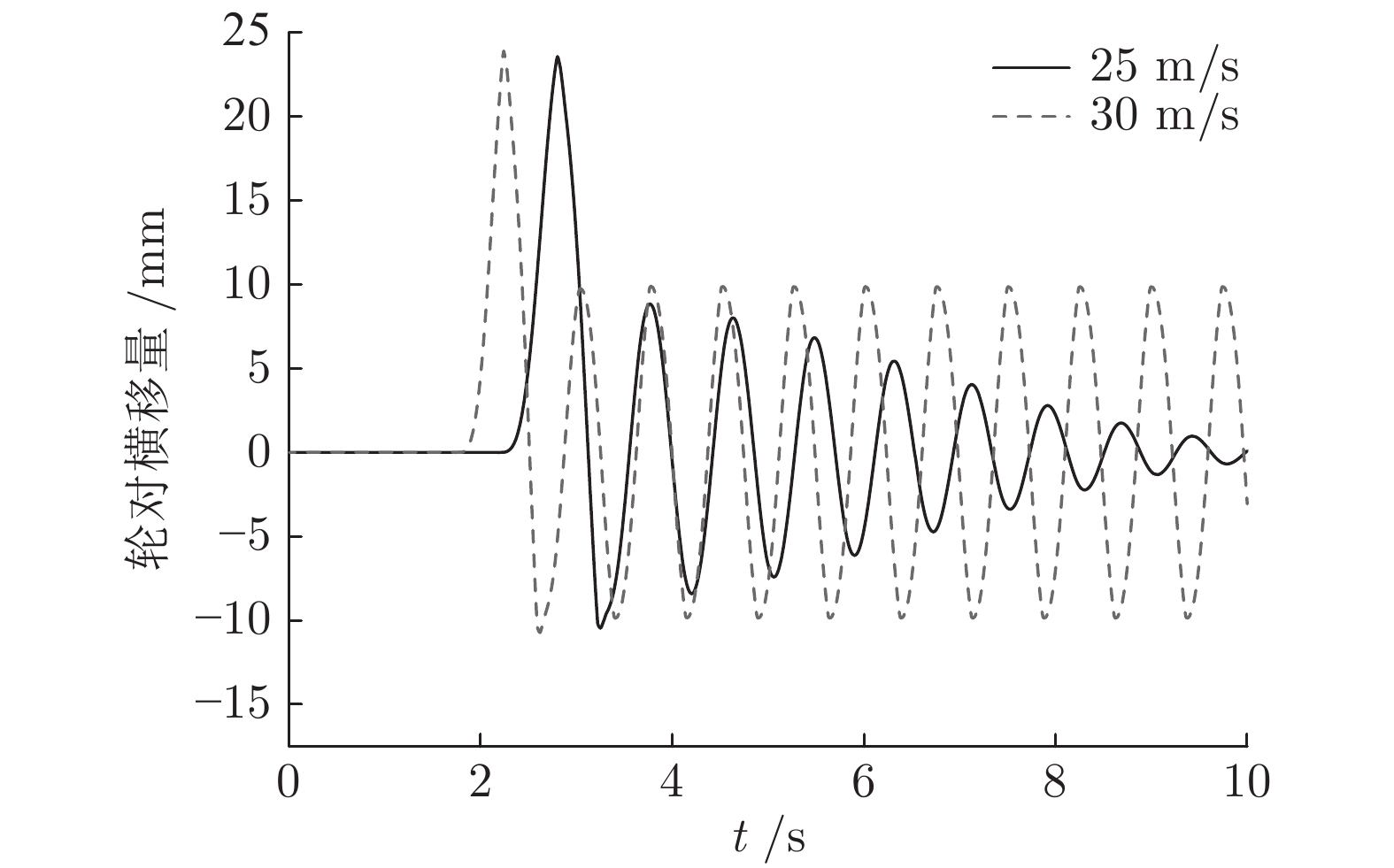
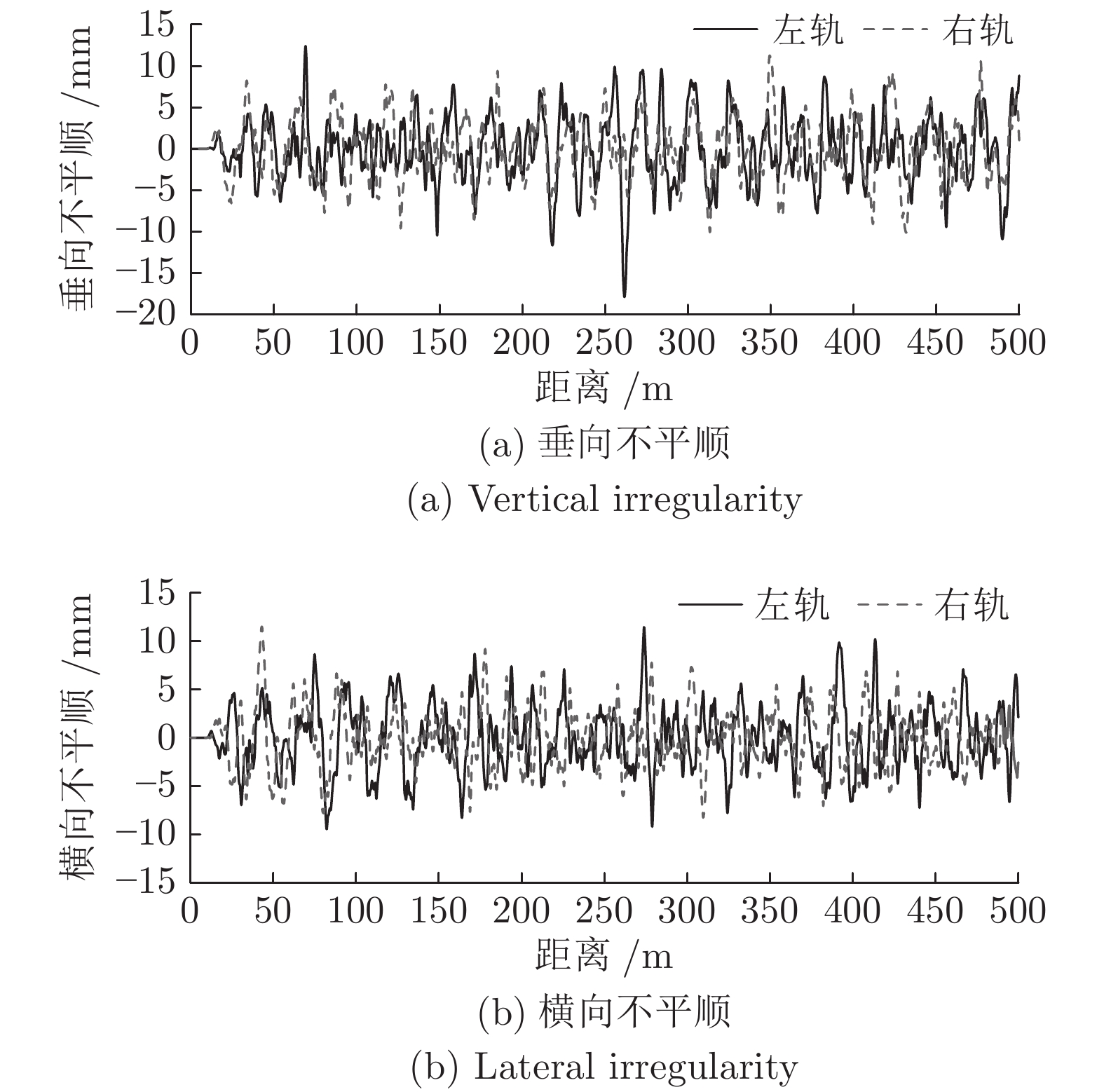
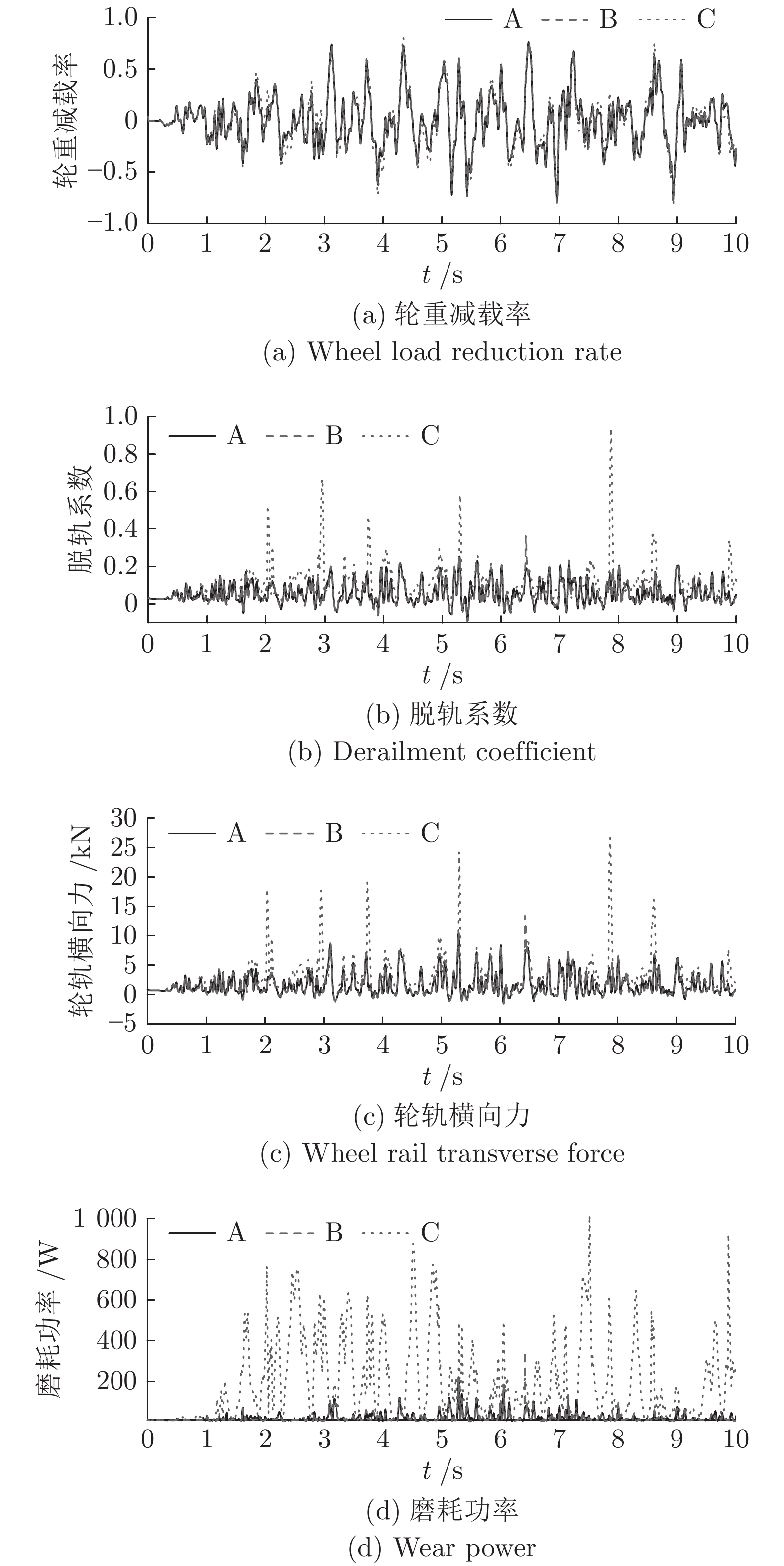
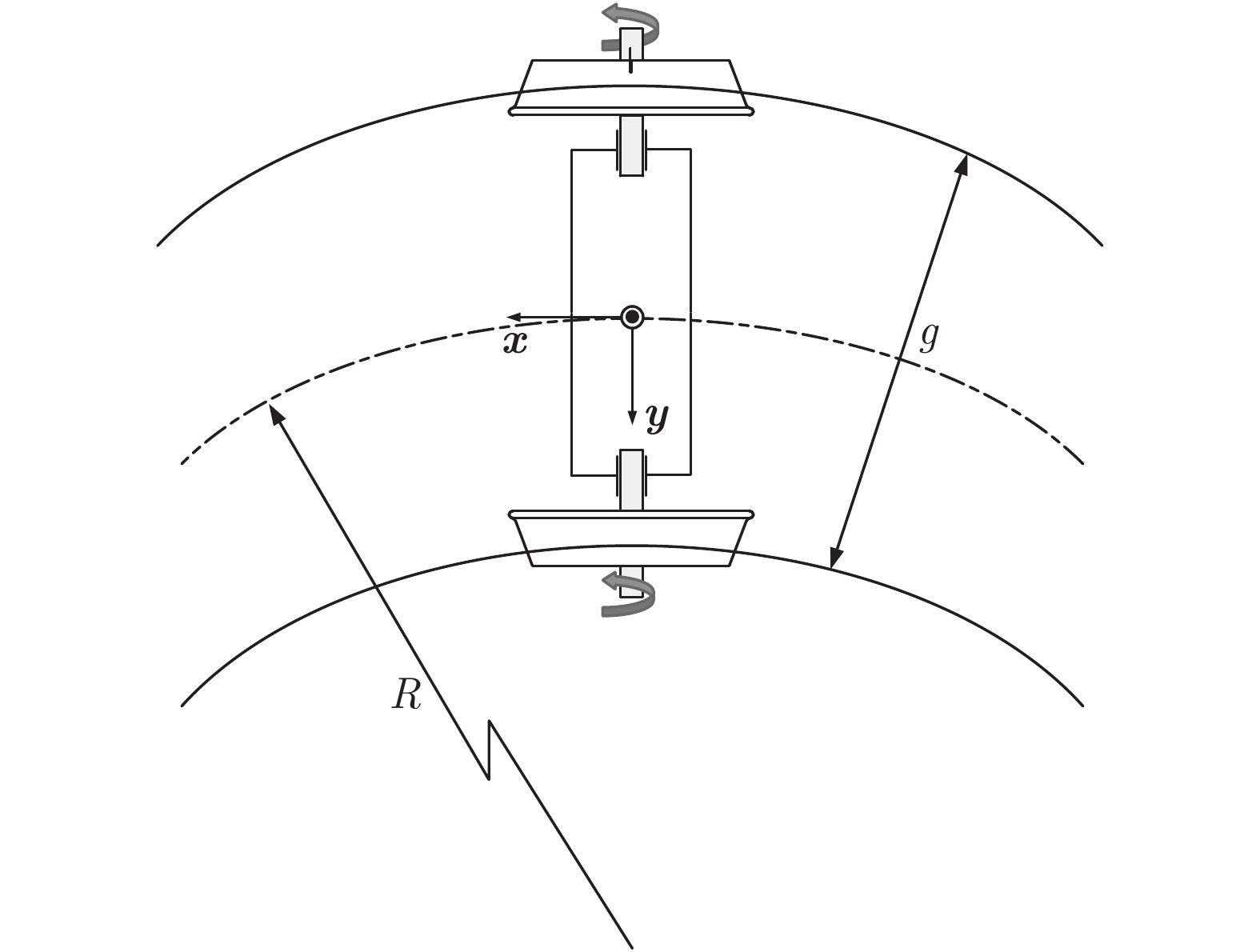
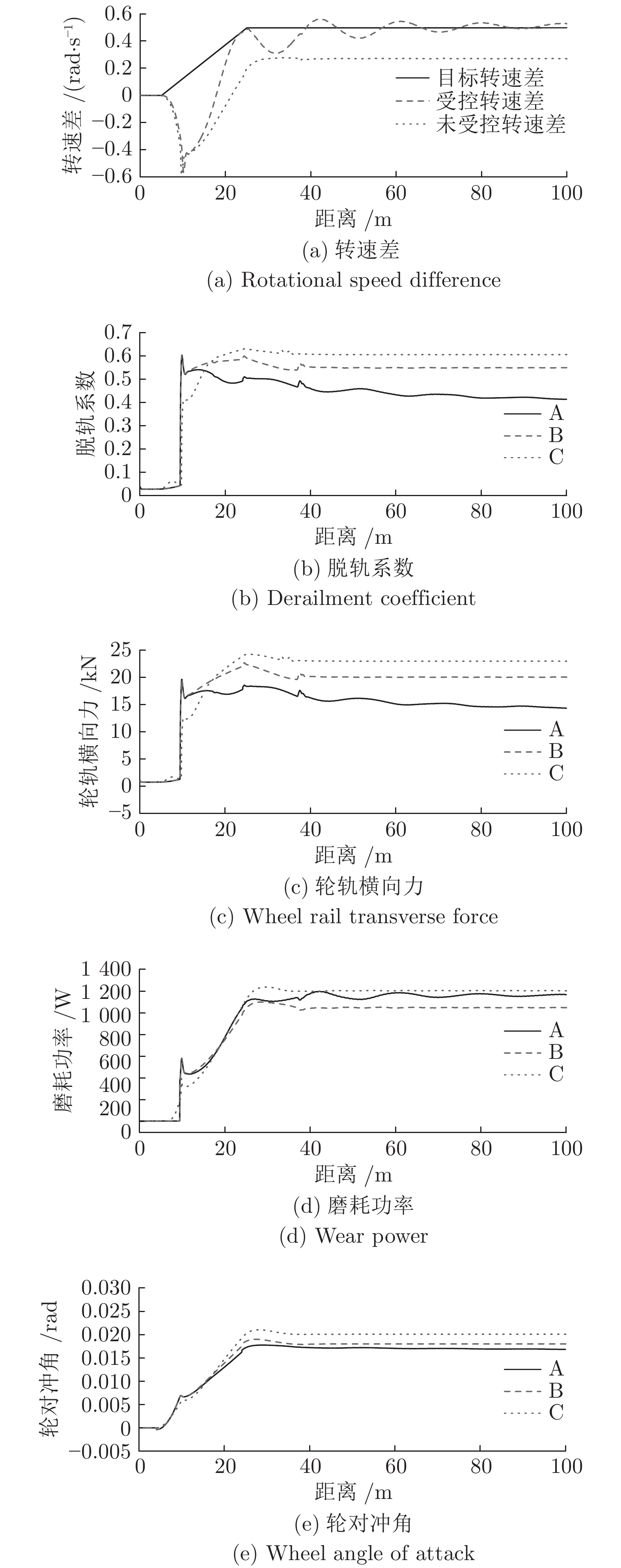
边驱耦合独立轮对(Independently rotating wheelset, IRW)技术是 100 %低地板轻轨车(Low floor tram, LFT)的关键技术之一, 边驱电机的扭矩控制策略直接影响轻轨车的动力学性能. 本文基于5自由度独立轮对的轨行机理, 搭建了考虑边驱传动系统的单节轻轨车动力学模型. 应用了一种分数阶PID (Fractional order PID, FOPID)扭矩控制策略, 优化了车辆的曲线通过性能. 采用Riemann-Liouville (RL) 分数阶微积分理论及Oustaloup滤波器数值逼近法构成FOPID控制器, 通过寻优运算对FOPID参数进行整定, 在Simulink平台下建立了整车的集成控制系统.通过扭矩控制器与整车动力学模型s函数联合仿真的方式,开展了100 % 低地板轻轨车辆的直线与曲线运行特性研究, 并将计算结果与无控制的独立轮对模型、传统轮对模型进行了对比分析. 研究结果表明, 在直线运行下, FOPID控制下的轻轨车能够提高车辆的稳定性, 受控轮对的抗轨道不平顺激扰能力较强. 在大半径曲线下, 无控制的独立轮对曲线通过性较差, 而受分数阶PID控制的独立轮对能够表现出与传统轮对一样优异的曲线通过性能; 在小半径曲线下, 分数阶PID扭矩控制策略能够使轻轨车获得足够的导向力, 曲线通过性能明显优于其他模型.
边驱耦合独立轮对(Independently rotating wheelset, IRW)技术是 100 %低地板轻轨车(Low floor tram, LFT)的关键技术之一, 边驱电机的扭矩控制策略直接影响轻轨车的动力学性能. 本文基于5自由度独立轮对的轨行机理, 搭建了考虑边驱传动系统的单节轻轨车动力学模型. 应用了一种分数阶PID (Fractional order PID, FOPID)扭矩控制策略, 优化了车辆的曲线通过性能. 采用Riemann-Liouville (RL) 分数阶微积分理论及Oustaloup滤波器数值逼近法构成FOPID控制器, 通过寻优运算对FOPID参数进行整定, 在Simulink平台下建立了整车的集成控制系统.通过扭矩控制器与整车动力学模型s函数联合仿真的方式,开展了100 % 低地板轻轨车辆的直线与曲线运行特性研究, 并将计算结果与无控制的独立轮对模型、传统轮对模型进行了对比分析. 研究结果表明, 在直线运行下, FOPID控制下的轻轨车能够提高车辆的稳定性, 受控轮对的抗轨道不平顺激扰能力较强. 在大半径曲线下, 无控制的独立轮对曲线通过性较差, 而受分数阶PID控制的独立轮对能够表现出与传统轮对一样优异的曲线通过性能; 在小半径曲线下, 分数阶PID扭矩控制策略能够使轻轨车获得足够的导向力, 曲线通过性能明显优于其他模型.






2020, 46(3): 495-508.
doi: 10.16383/j.aas.190216
摘要:
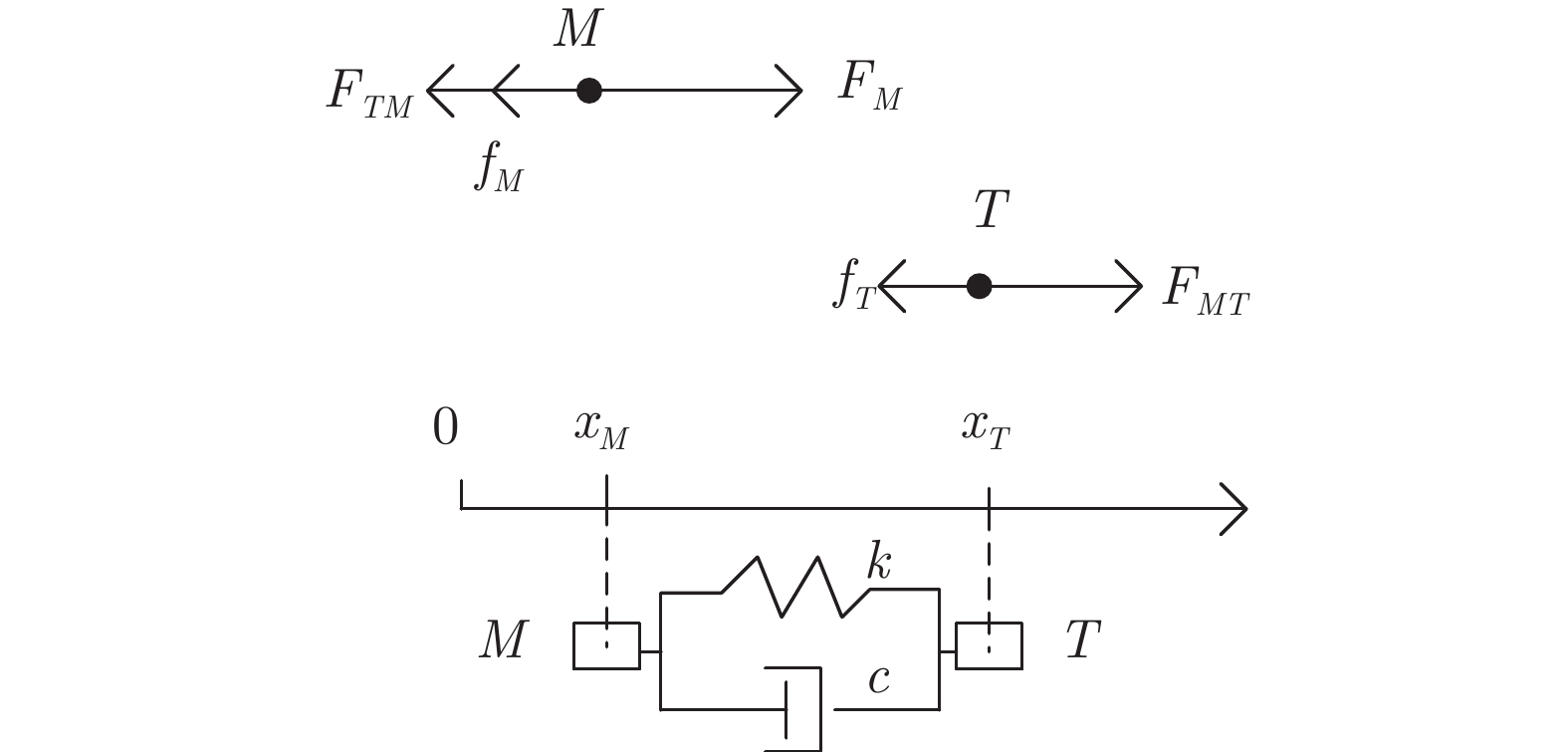
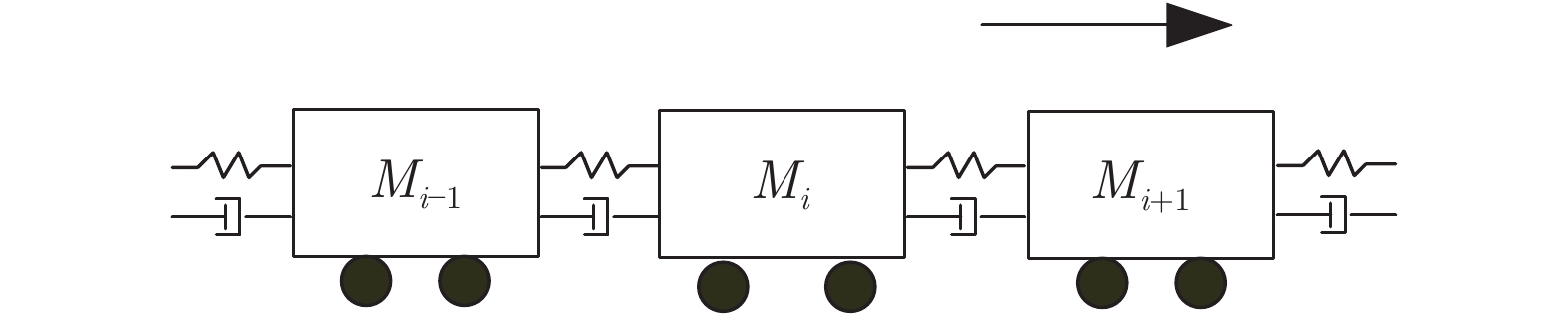
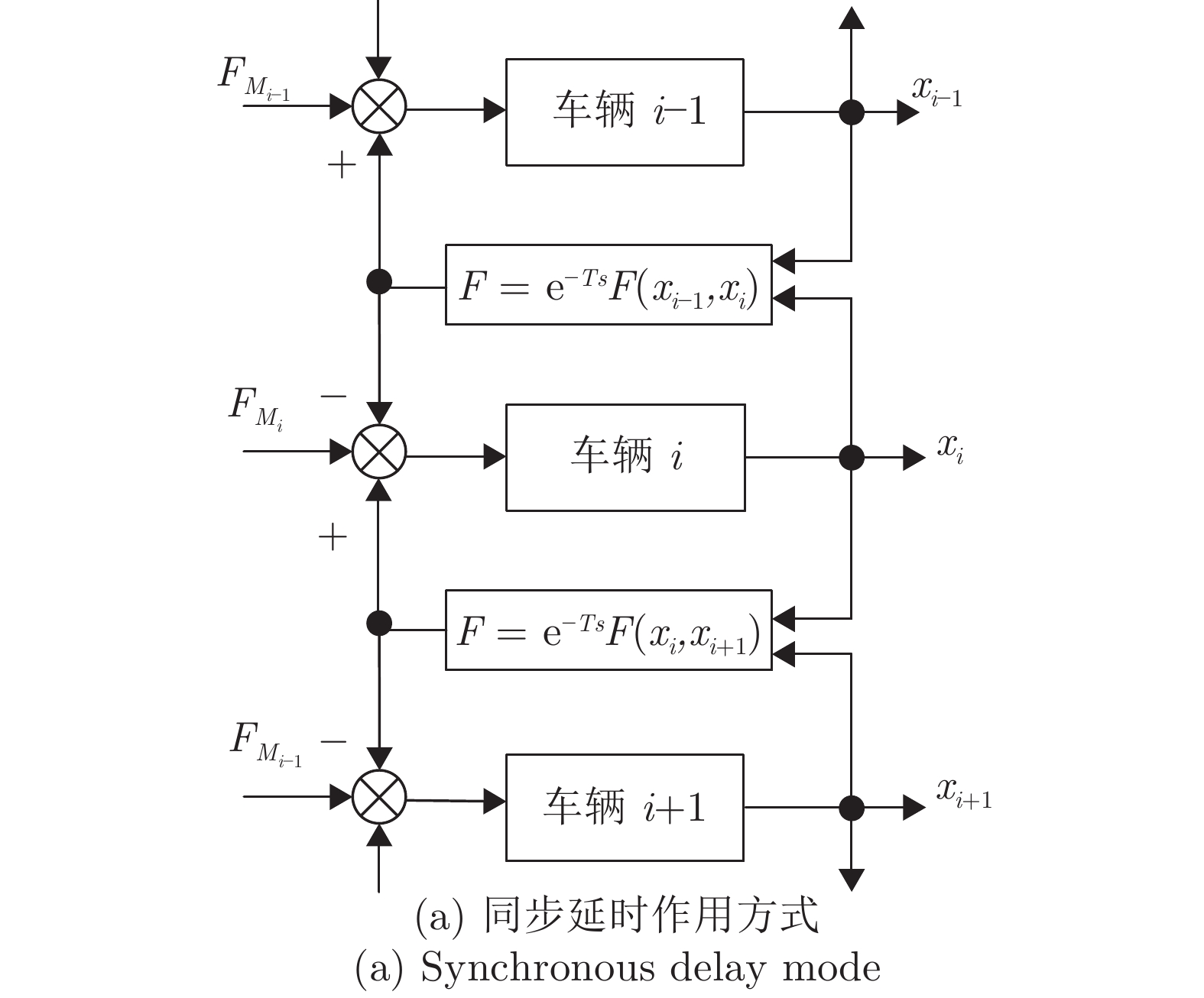
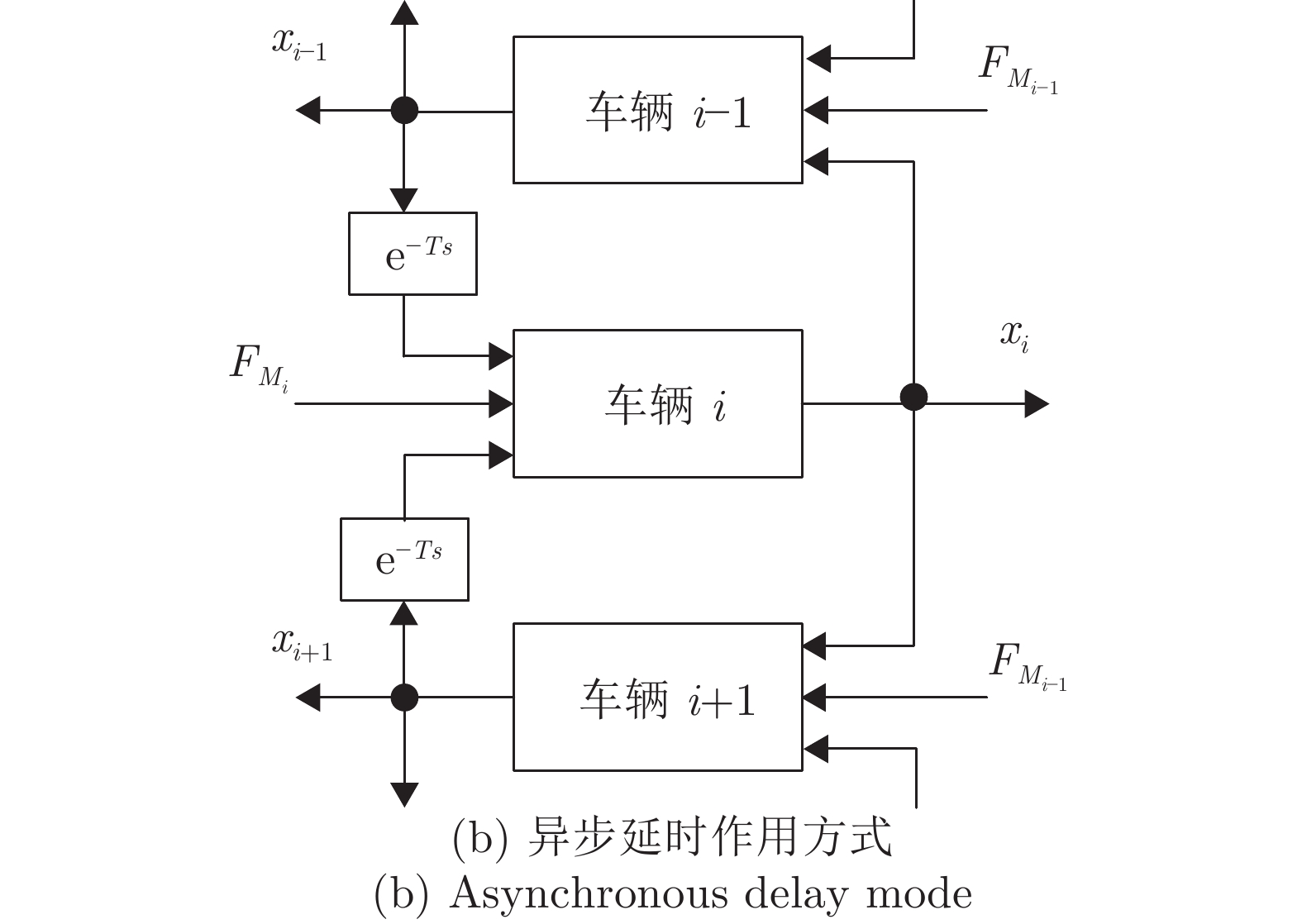
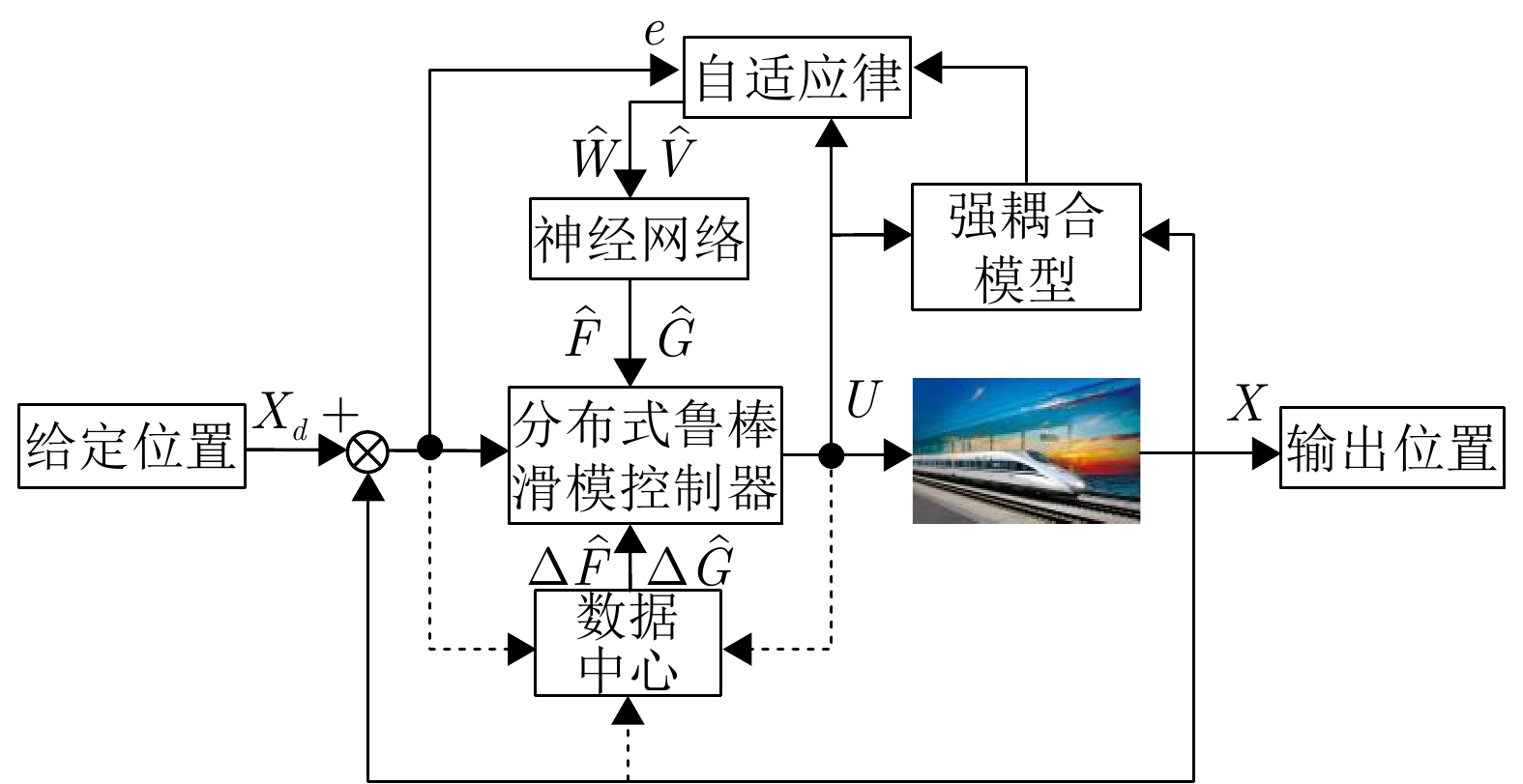
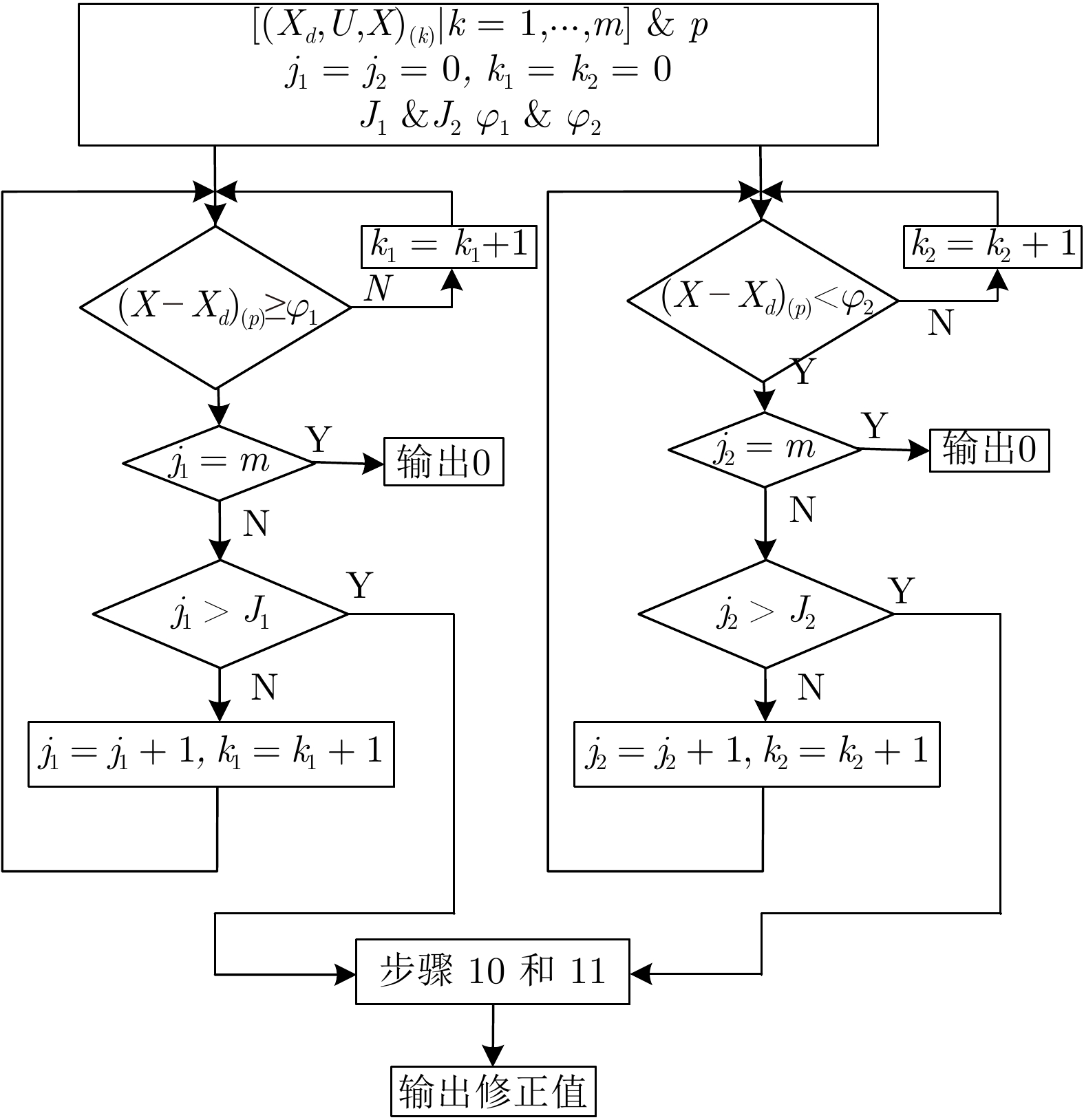
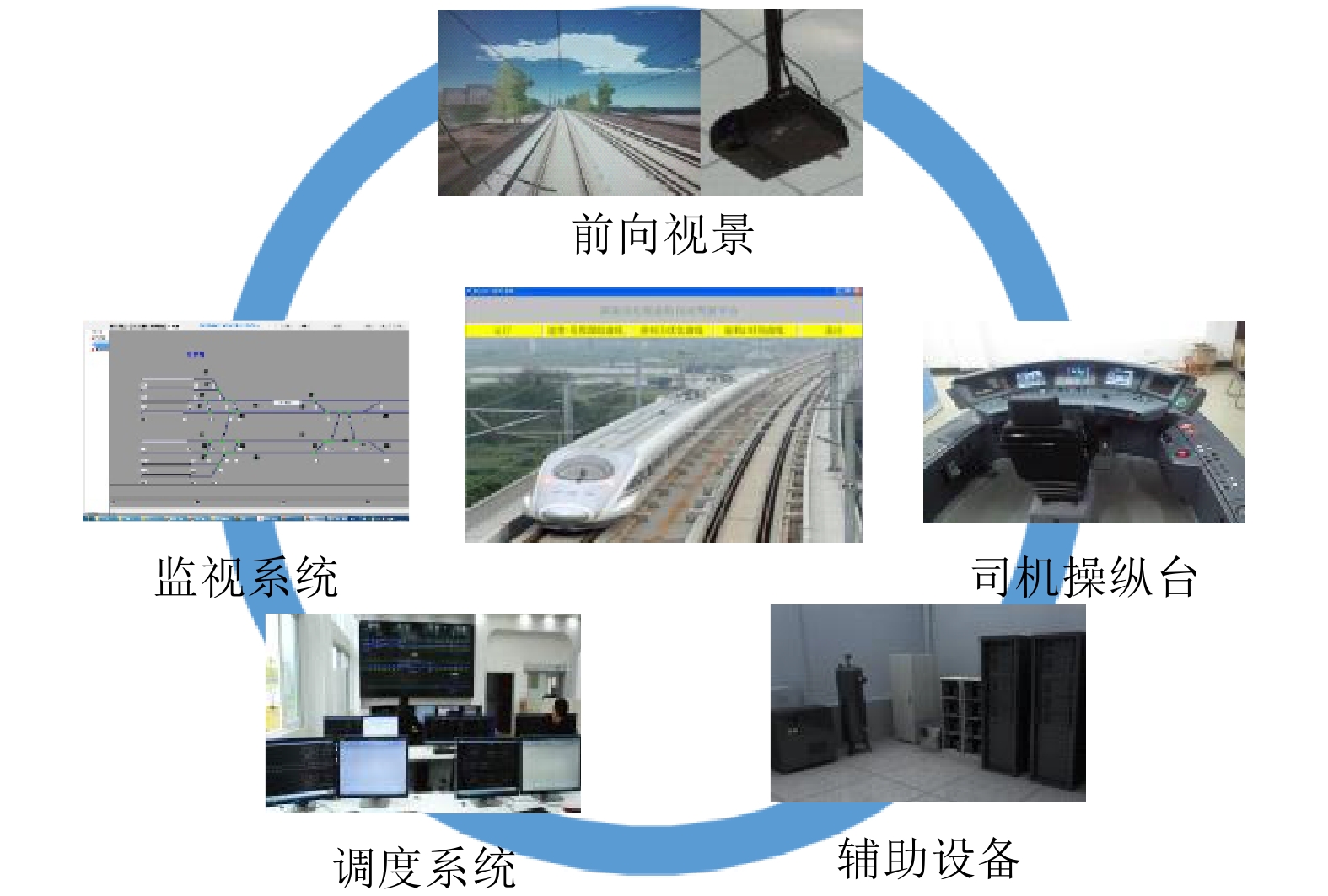
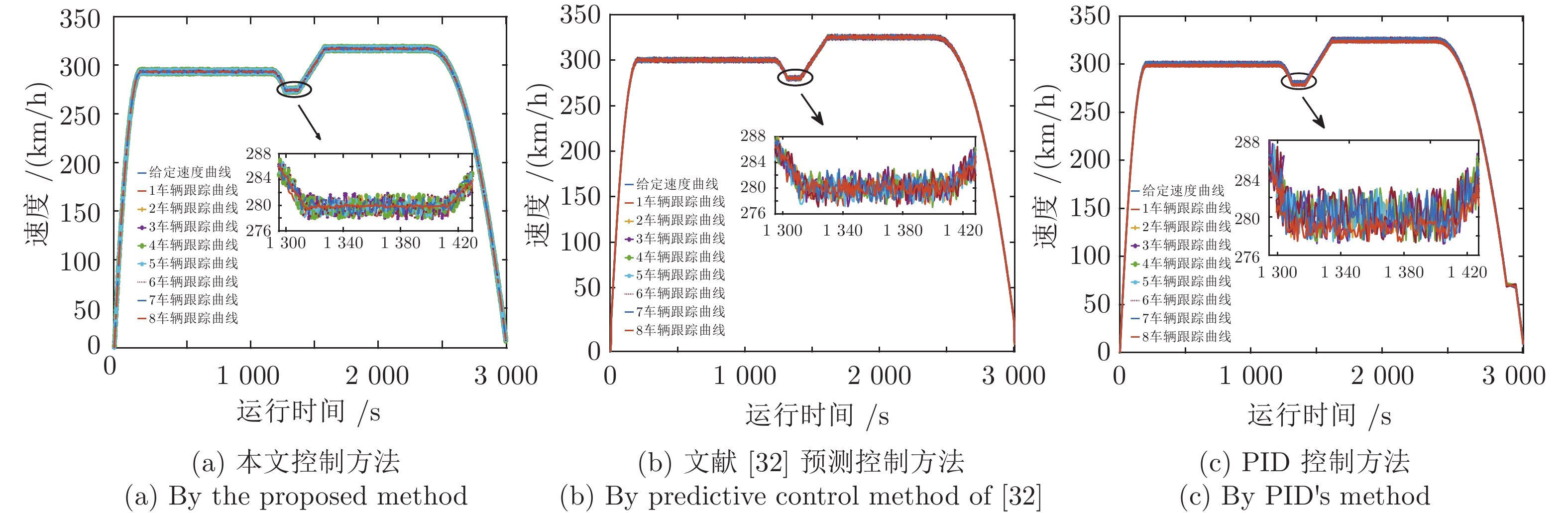
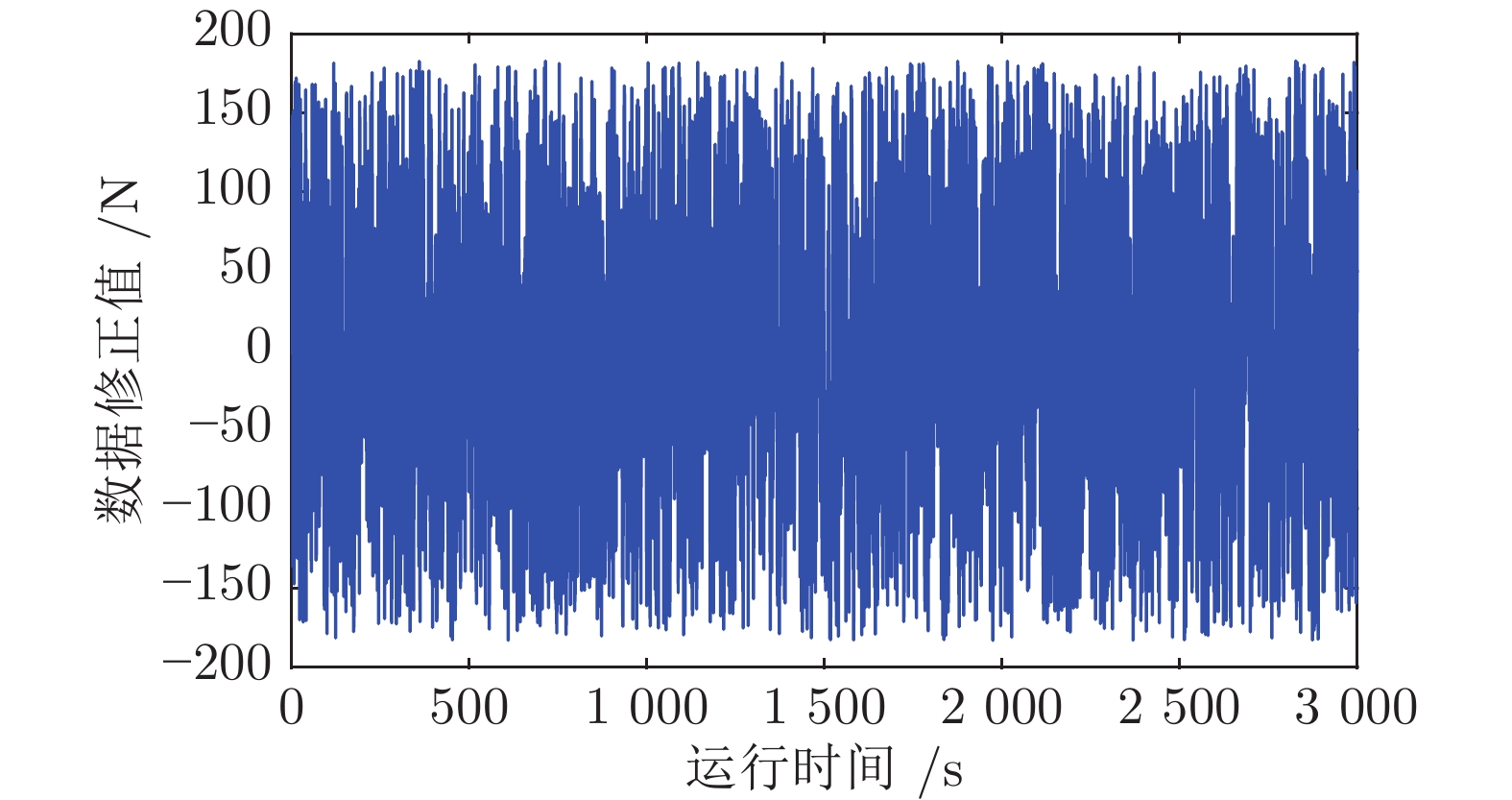
高速动车组是由多节车辆与钩缓装置链接而成的复杂系统. 将钩缓装置等效成弹簧 − 阻尼器系统, 分析动车组运行过程中钩缓装置对相邻车辆作用的动力学机理, 明确作用方式, 建立高速动车组的强耦合模型. 根据列车模型动力或制动力输入的分散特征, 设计分布式神经网络滑模控制策略, 对高速动车组进行速度跟踪控制. 为减小速度跟踪过程中未知因素对高速动车组控制精度的影响, 利用列车历史运行数据, 采用历史工况数据中心对当前控制律输出进行补偿以提高控制精度与实用稳定性. 采用高速动车组运行仿真平台的仿真实验结果表明, 该建模方法较以往多质点模型更能体现高速动车组运行特性, 且采用补偿规则的控制策略优于传统控制效果.
高速动车组是由多节车辆与钩缓装置链接而成的复杂系统. 将钩缓装置等效成弹簧 − 阻尼器系统, 分析动车组运行过程中钩缓装置对相邻车辆作用的动力学机理, 明确作用方式, 建立高速动车组的强耦合模型. 根据列车模型动力或制动力输入的分散特征, 设计分布式神经网络滑模控制策略, 对高速动车组进行速度跟踪控制. 为减小速度跟踪过程中未知因素对高速动车组控制精度的影响, 利用列车历史运行数据, 采用历史工况数据中心对当前控制律输出进行补偿以提高控制精度与实用稳定性. 采用高速动车组运行仿真平台的仿真实验结果表明, 该建模方法较以往多质点模型更能体现高速动车组运行特性, 且采用补偿规则的控制策略优于传统控制效果.







2020, 46(3): 509-517.
doi: 10.16383/j.aas.c190217
摘要:
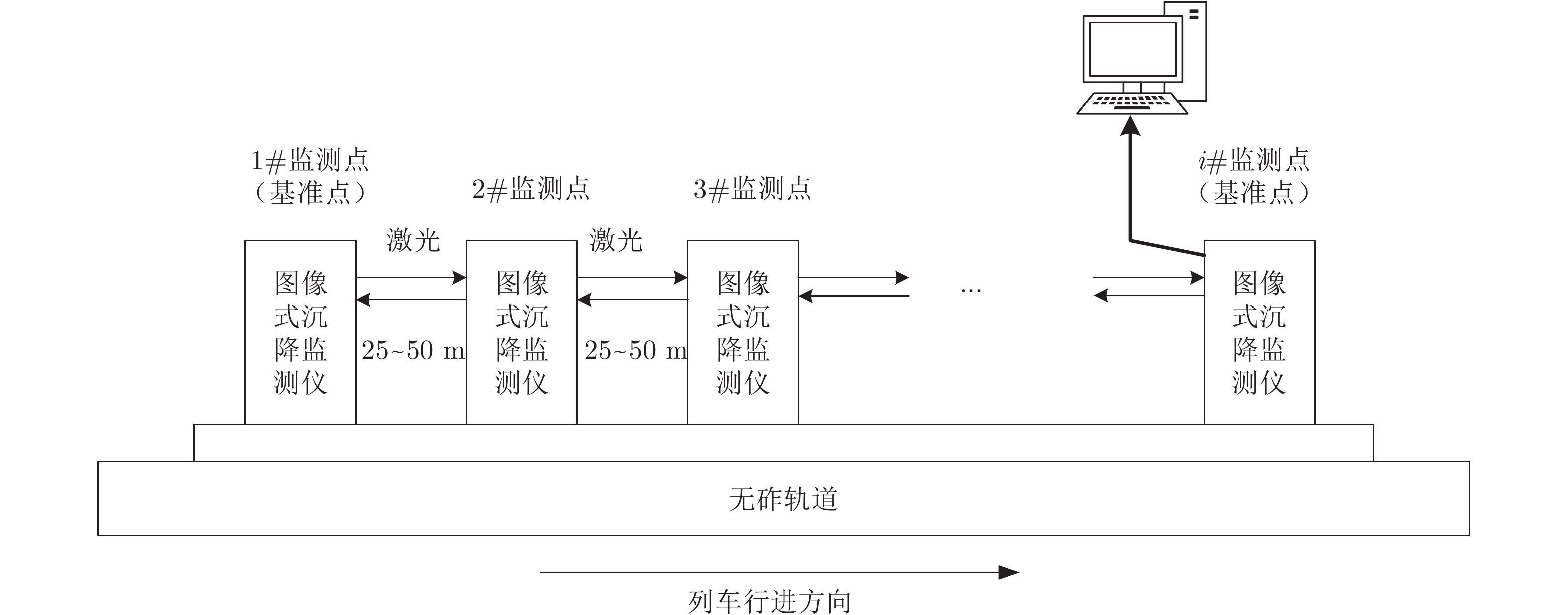
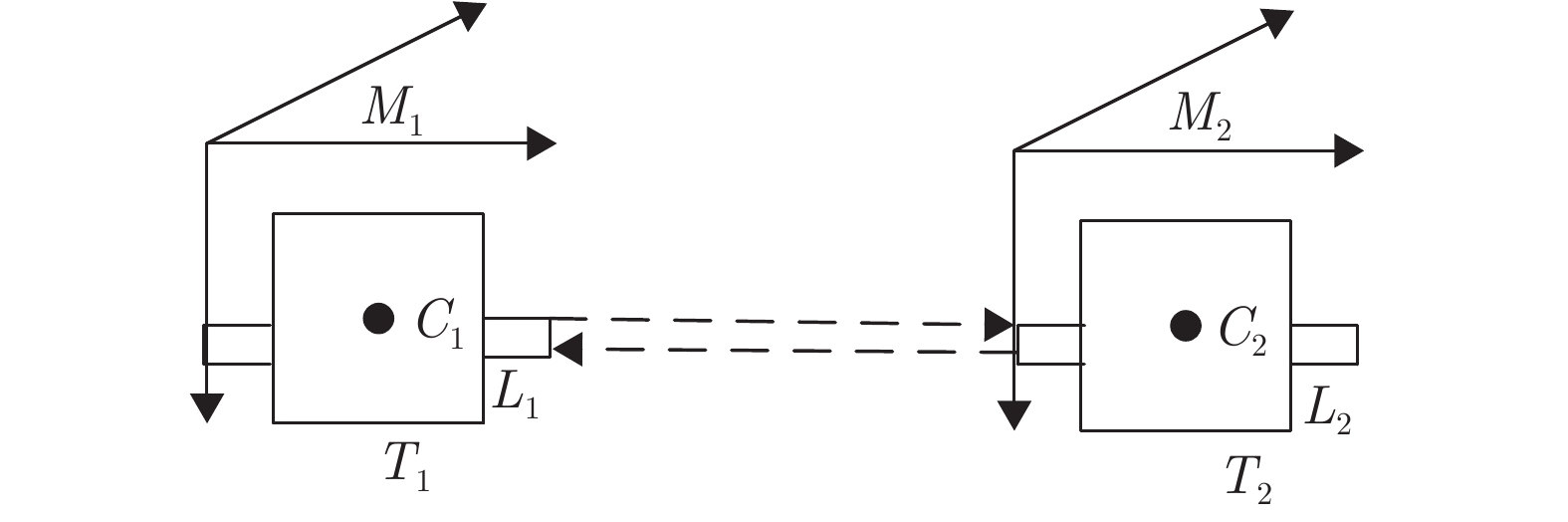
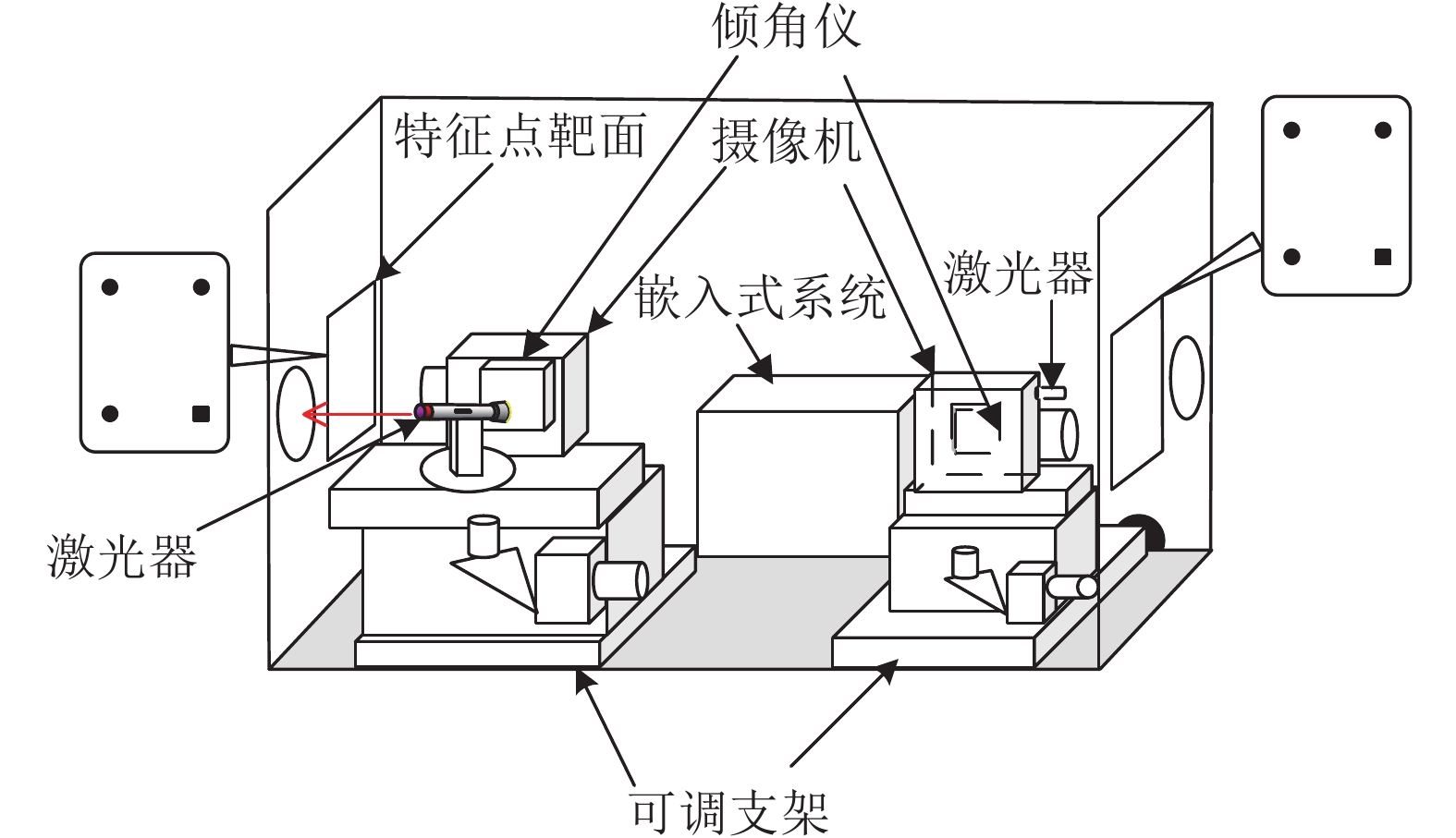
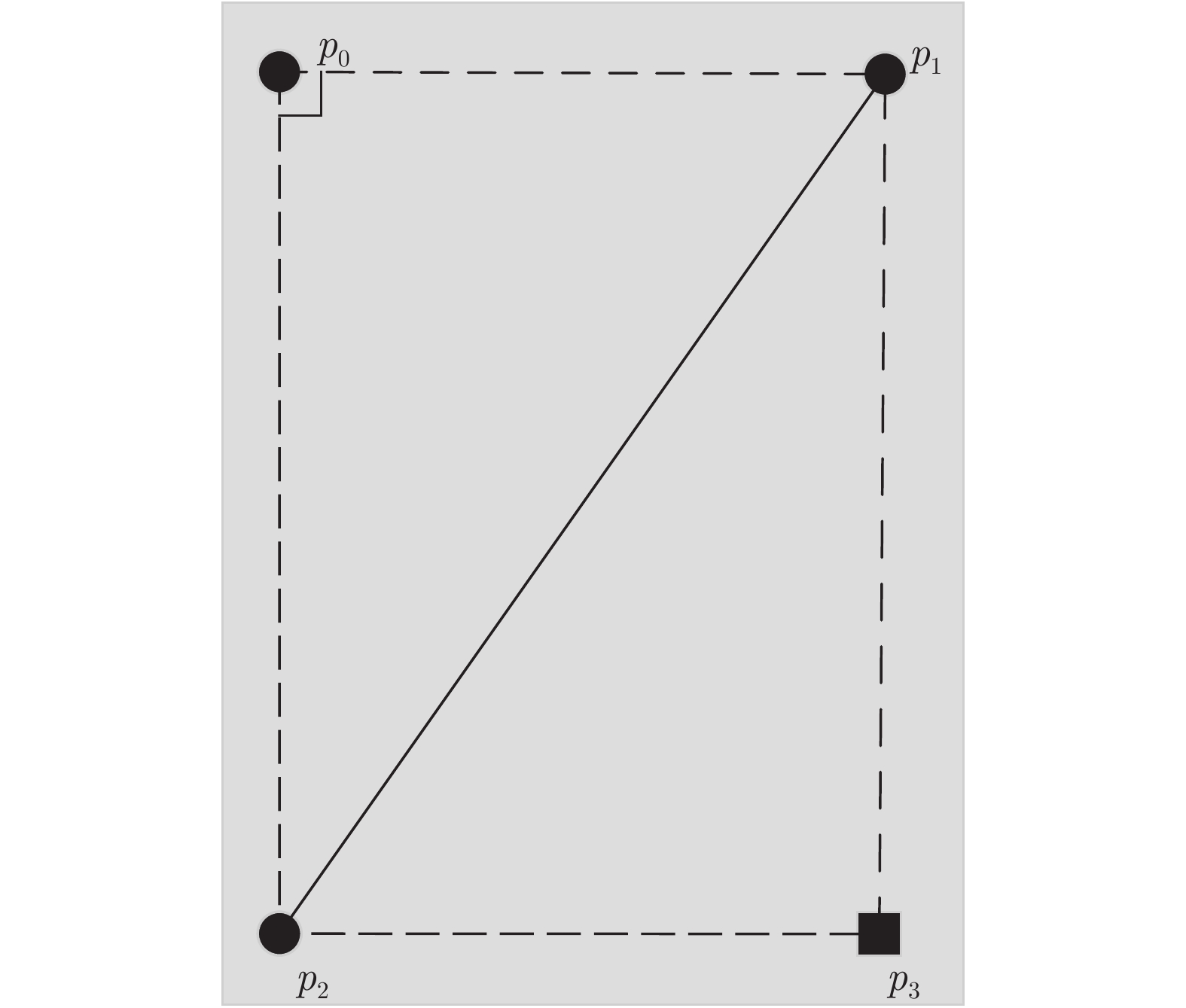
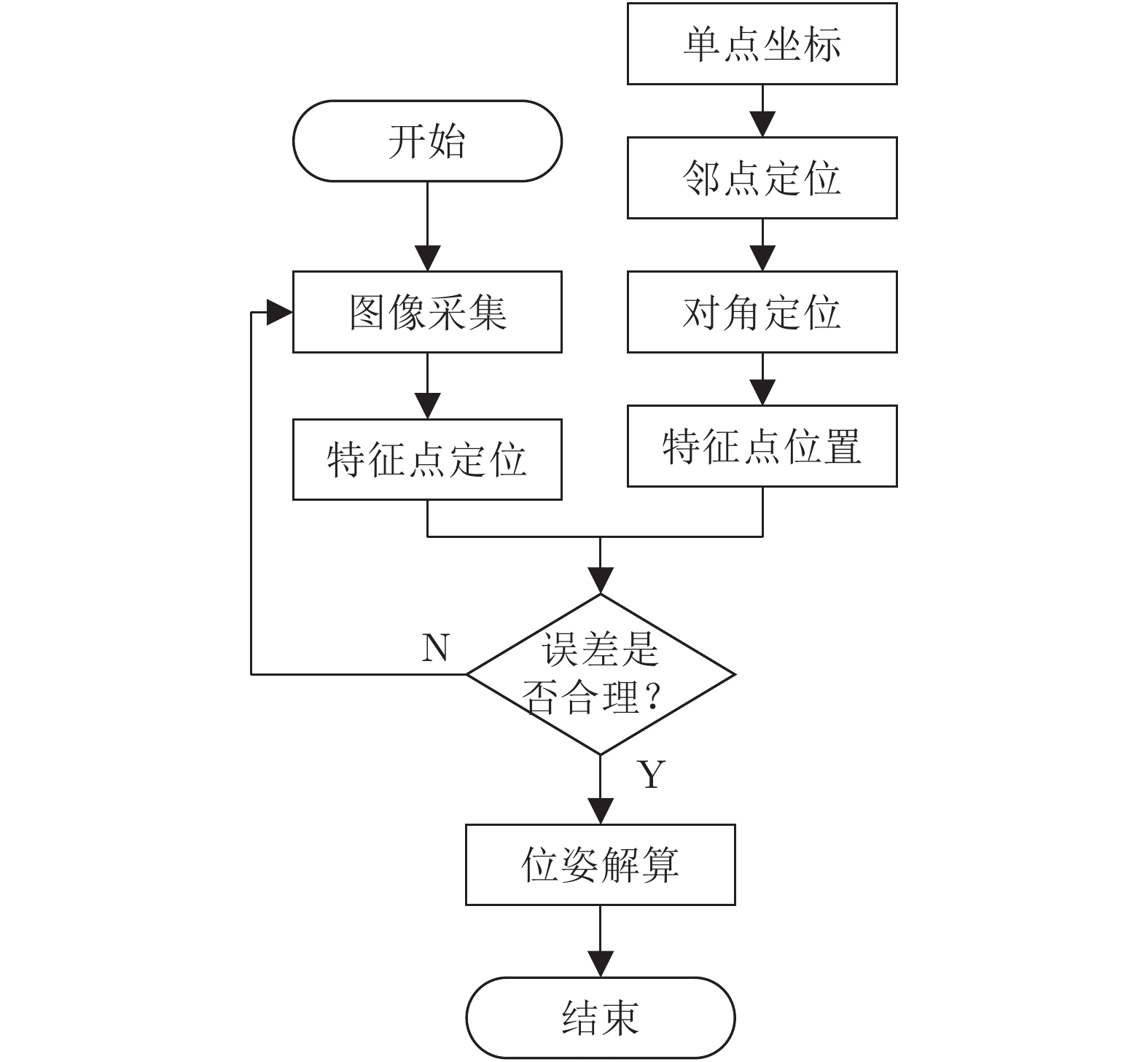
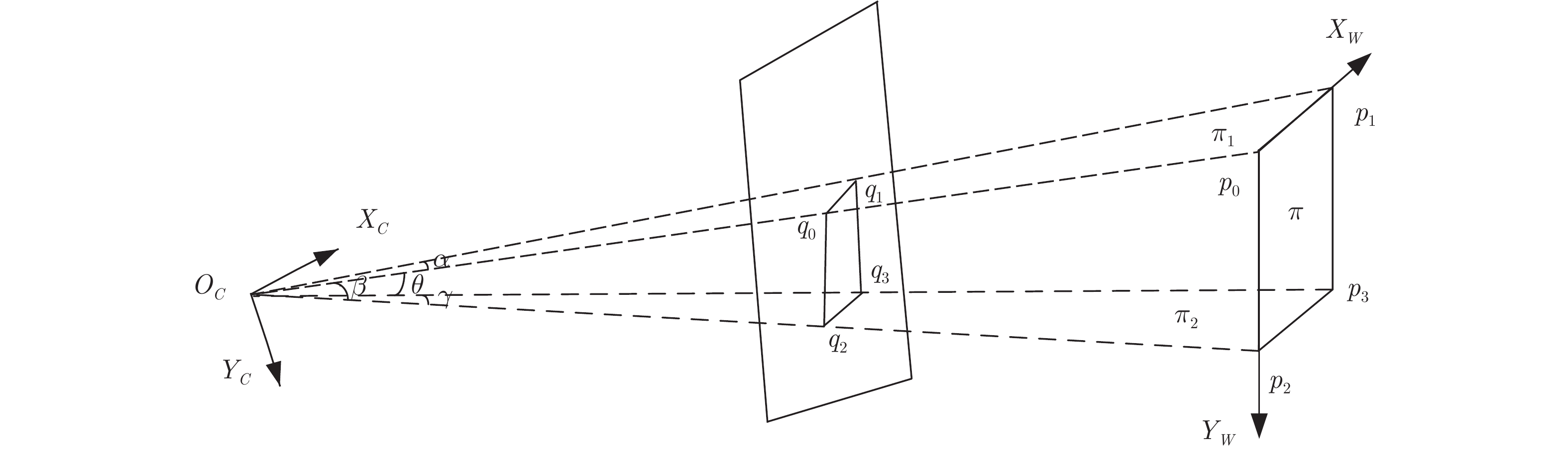
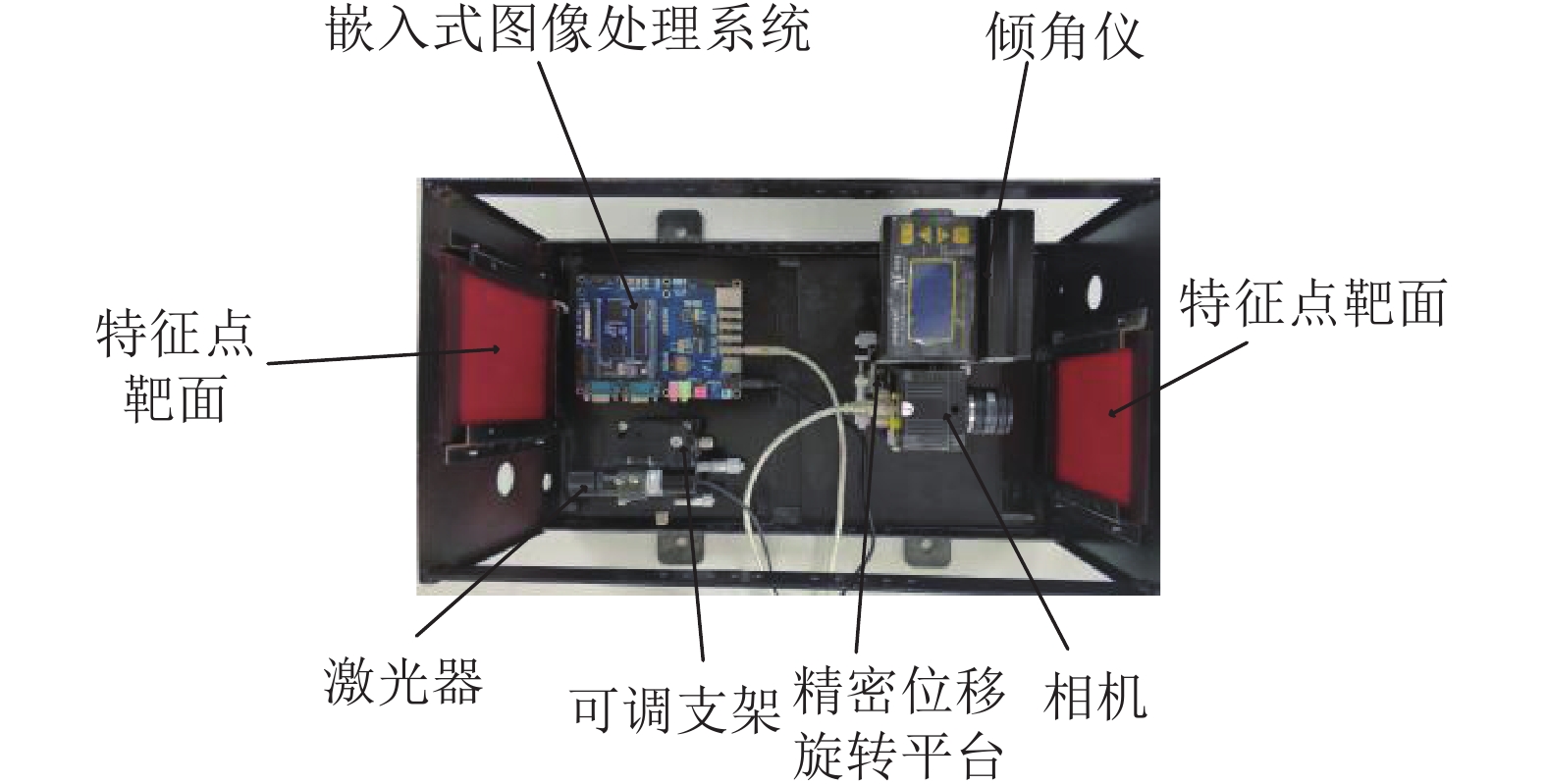
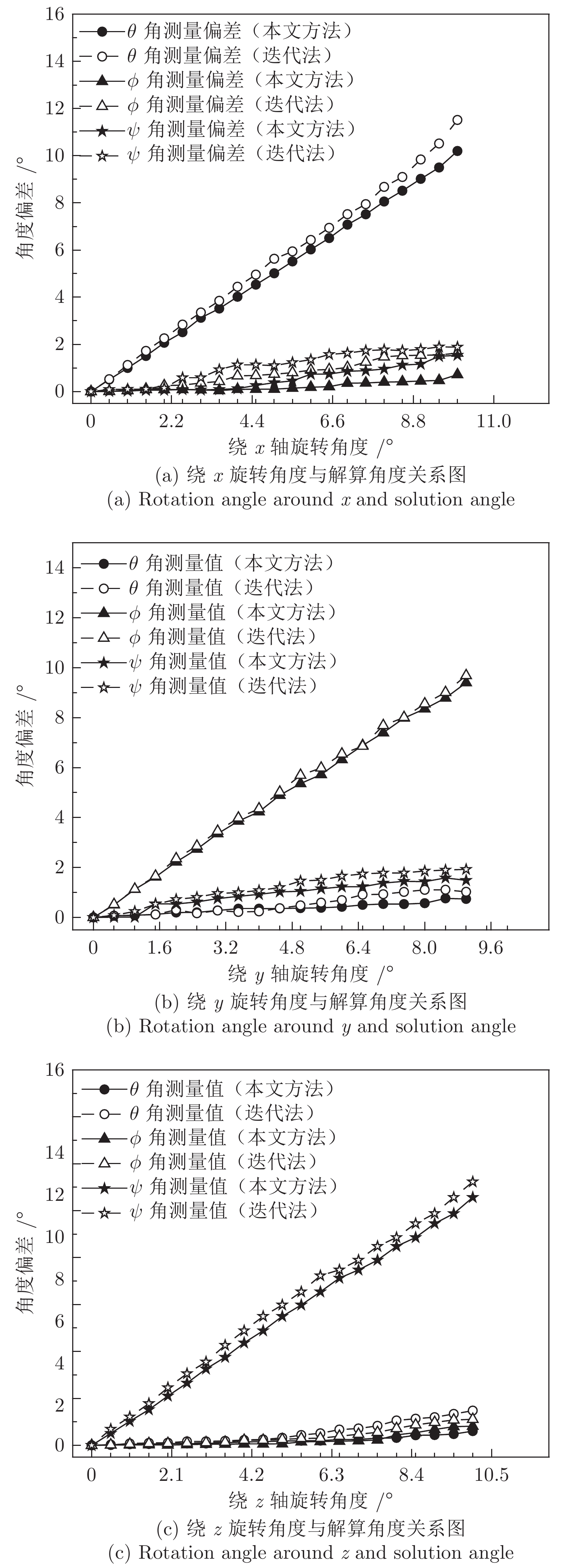
针对图像式路基沉降监测系统中由于振动等因素导致靶标与相机发生偏转产生测量误差的问题, 本文在设计监测系统靶面位姿测量系统的基础上提出了基于4特征点位置校正的位姿测量方法. 首先介绍了图像式路基沉降监测方法的工作原理; 然后根据实际情况设计了区别于传统特征点的4特征点靶面的位姿测量系统, 并利用特殊特征点对靶面特征点进行位置校正; 最后根据设计的4特征点靶面测量系统提出已知矩形4特征点边长的位姿求解方法. 实验结果表明: 本文方法比迭代法位姿解算后角度误差值更小, 其位姿解算相对误差减小1.2 %. 当偏转角度小于2° 时, 本文方法位姿求解旋转角度误差小于0.09°, 相对角度误差为1.003 %. 其时间和测量精度都能够达到监测系统要求, 可以应用于监测系统中需要对相机和靶标进行实时标定的场景.
针对图像式路基沉降监测系统中由于振动等因素导致靶标与相机发生偏转产生测量误差的问题, 本文在设计监测系统靶面位姿测量系统的基础上提出了基于4特征点位置校正的位姿测量方法. 首先介绍了图像式路基沉降监测方法的工作原理; 然后根据实际情况设计了区别于传统特征点的4特征点靶面的位姿测量系统, 并利用特殊特征点对靶面特征点进行位置校正; 最后根据设计的4特征点靶面测量系统提出已知矩形4特征点边长的位姿求解方法. 实验结果表明: 本文方法比迭代法位姿解算后角度误差值更小, 其位姿解算相对误差减小1.2 %. 当偏转角度小于2° 时, 本文方法位姿求解旋转角度误差小于0.09°, 相对角度误差为1.003 %. 其时间和测量精度都能够达到监测系统要求, 可以应用于监测系统中需要对相机和靶标进行实时标定的场景.


2020, 46(3): 518-530.
doi: 10.16383/j.aas.c190182
摘要:
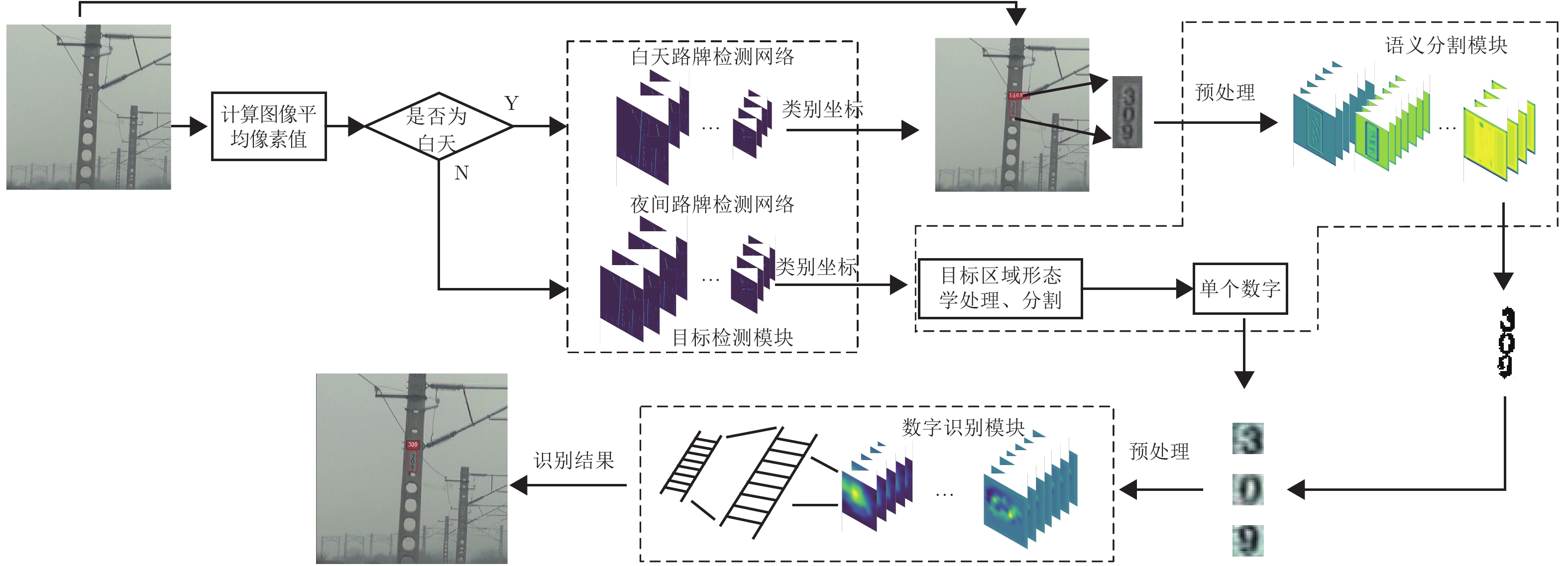
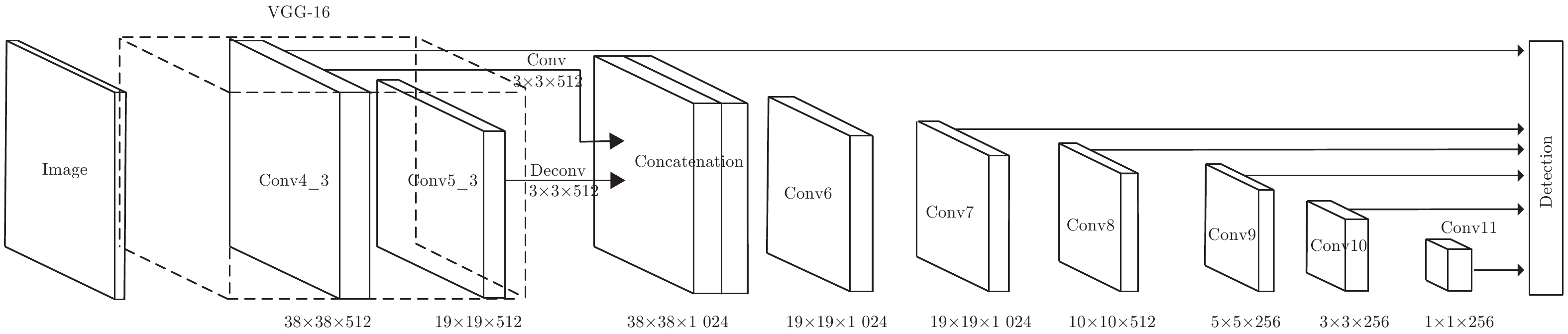
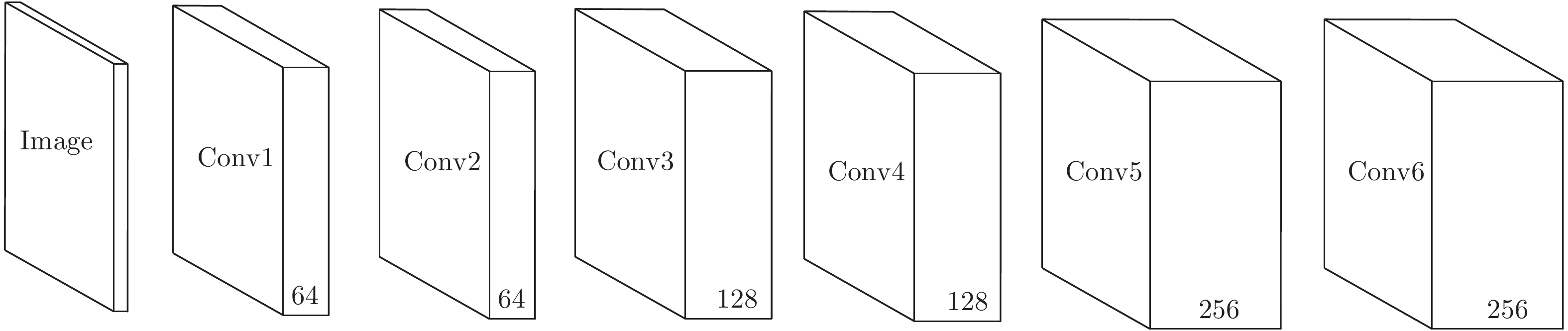
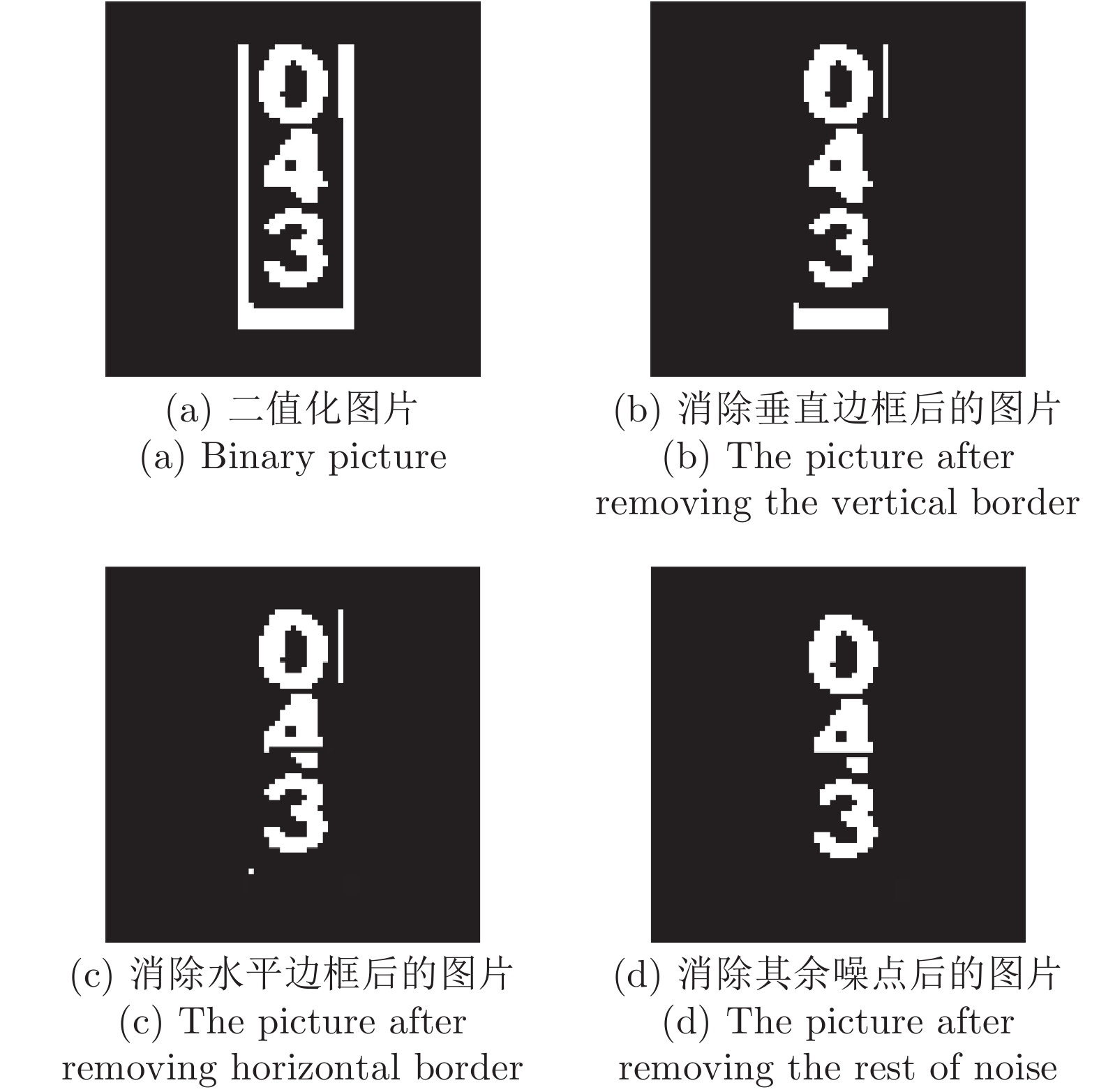
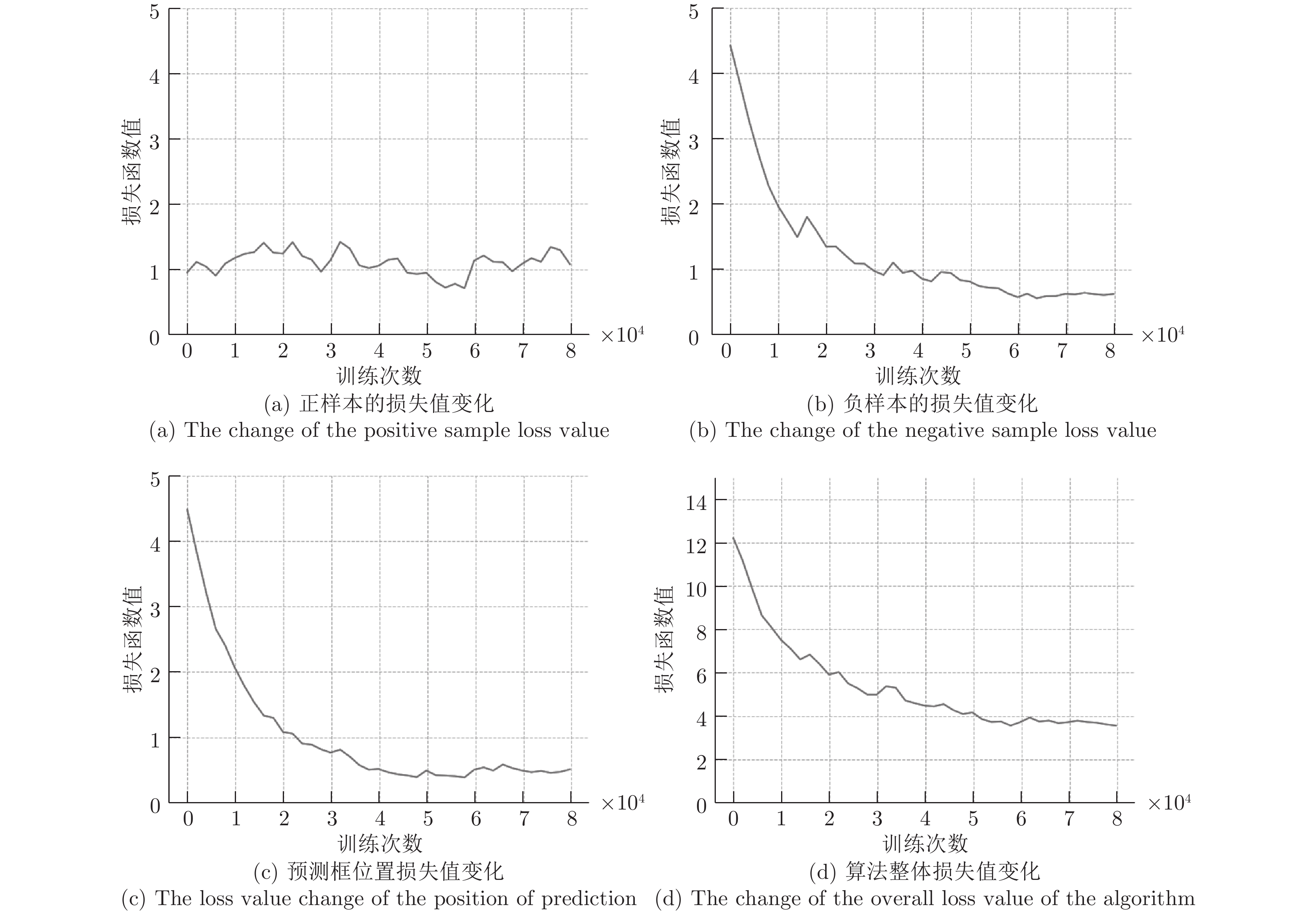
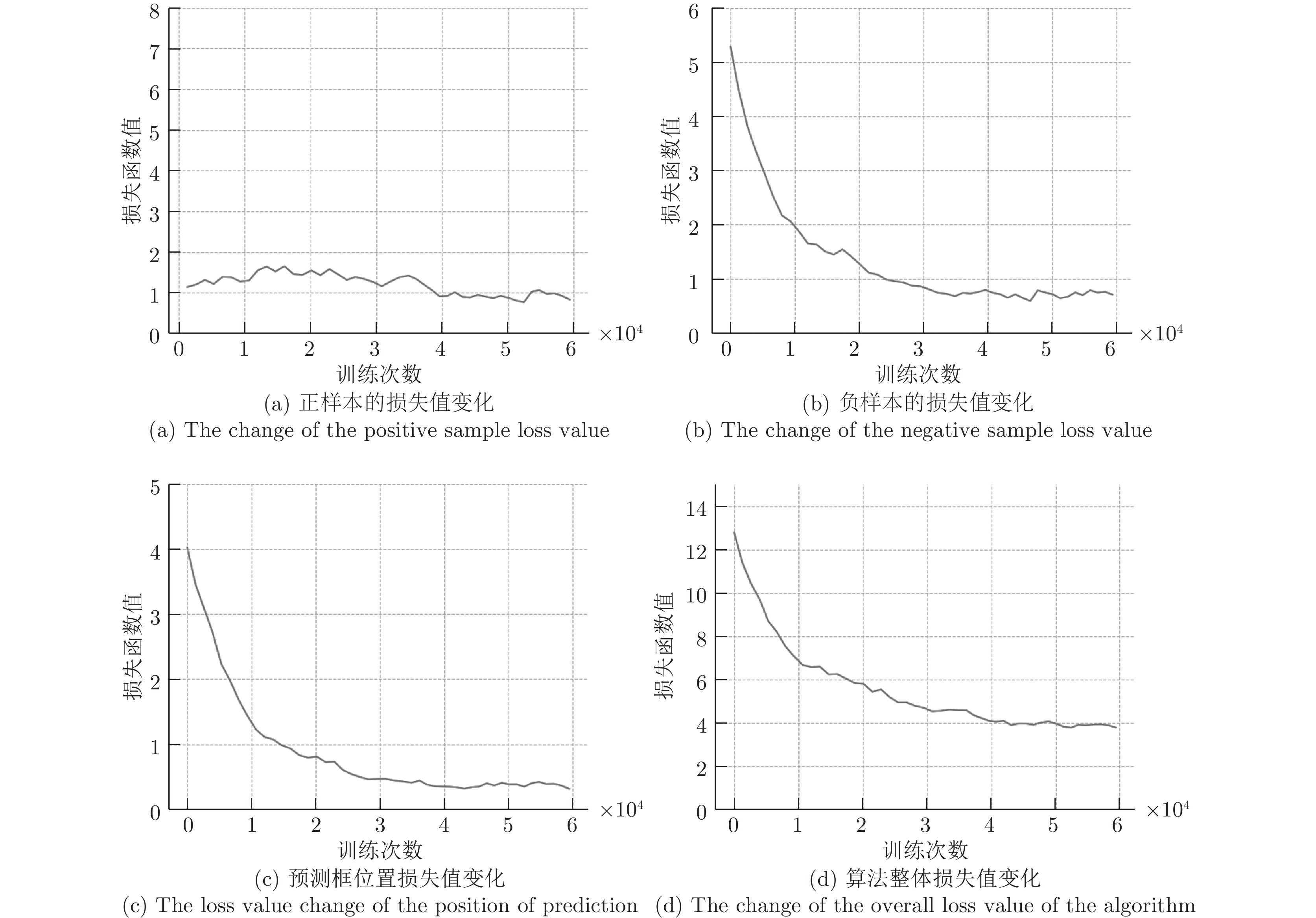
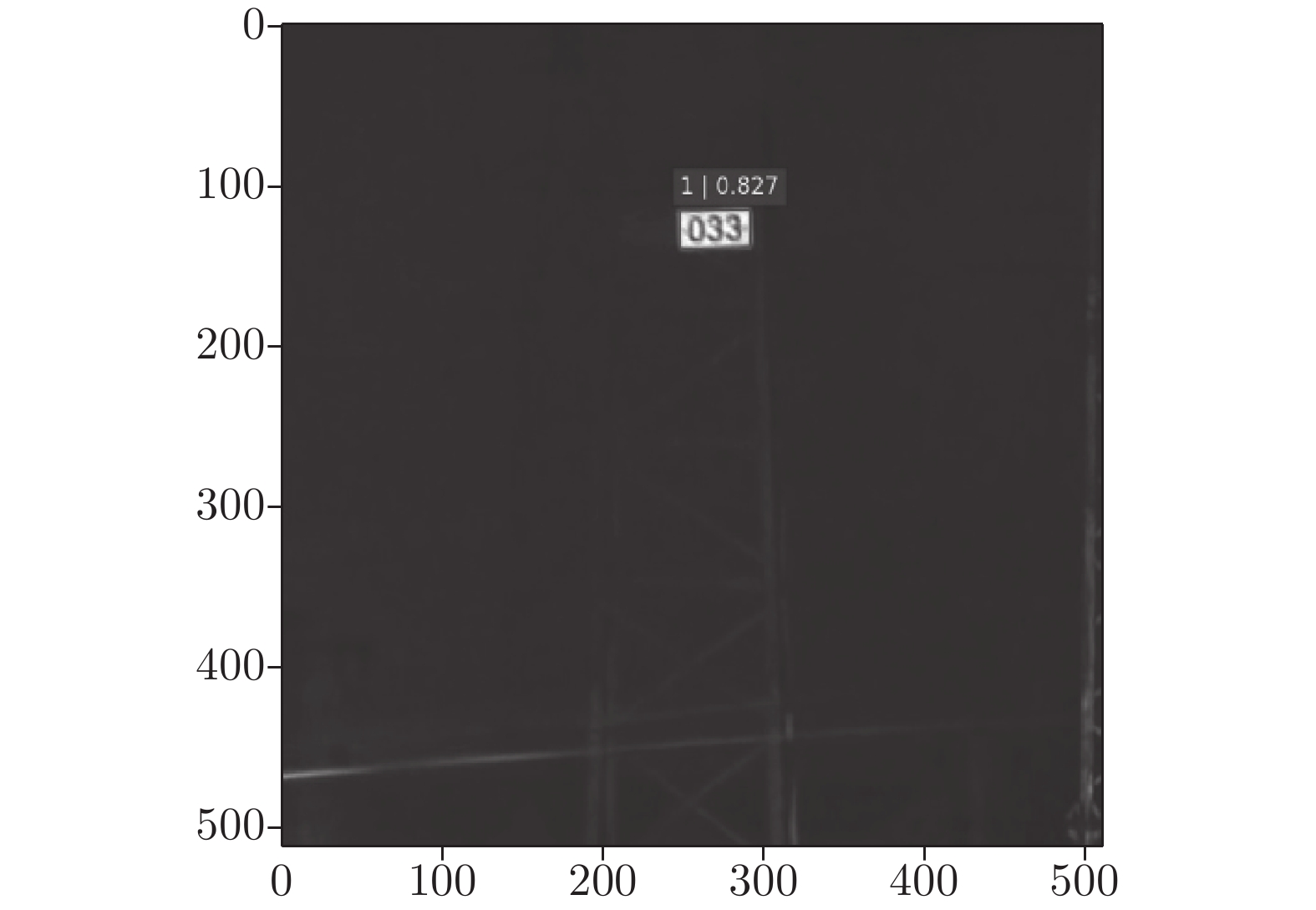
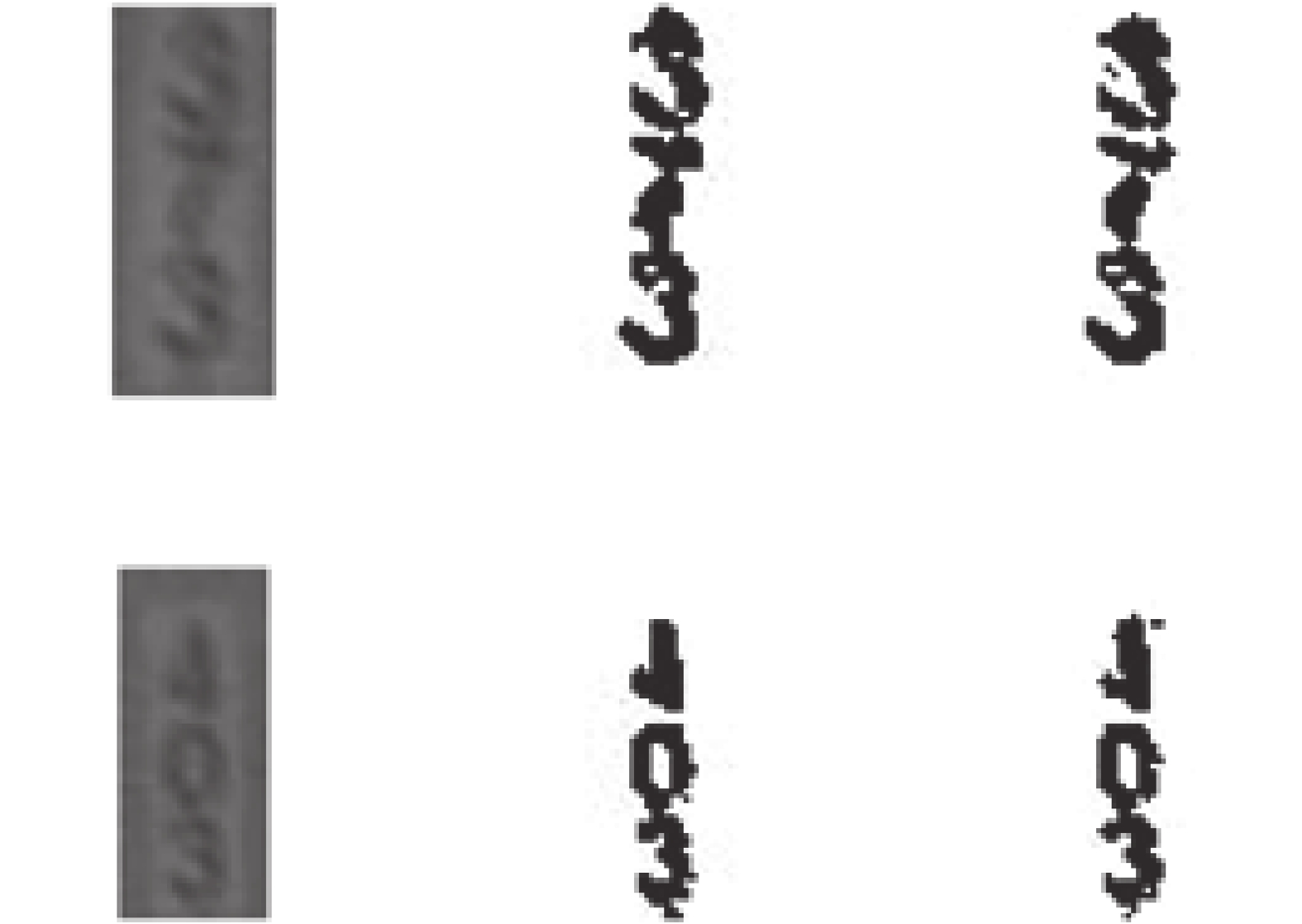
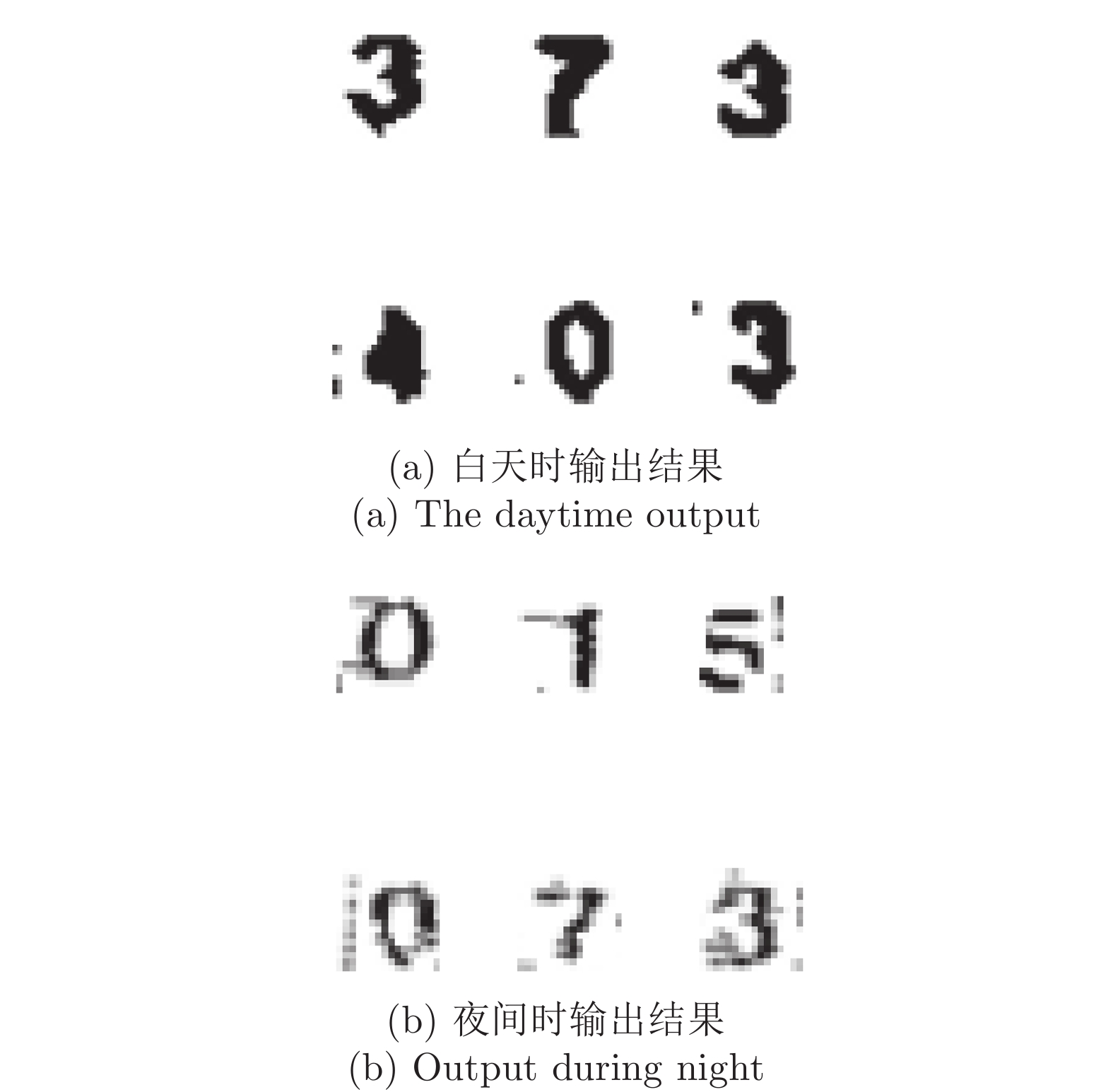
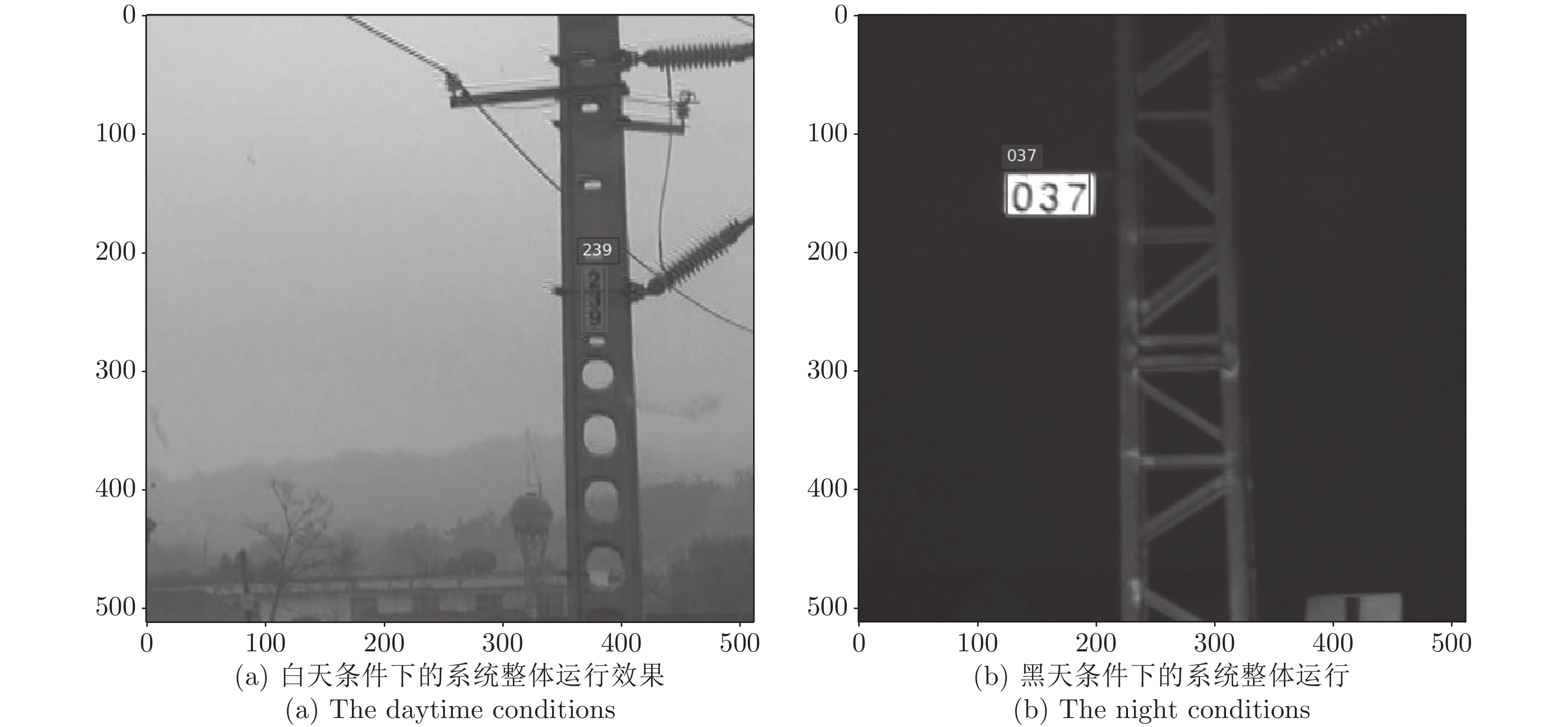
轨道交通在我国综合交通运输体系中占有重要的地位, 随着人工智能的发展, 智能感知轨道交通周围环境的信息也变得越来越引人注目. 本文结合深度学习与图像处理的方法, 设计并实现了一种基于卷积神经网络的高铁轨道周边路牌数字识别的智能系统, 该系统通过在高铁驾驶室内安装摄像头的方式采集运行前方的视频, 并通过目标识别、语义分割等深度学习算法自动定位并识别路牌内的数字, 从而解决了之前人工处理的繁琐和低效率.本算法整体系统由三个子模块构成, 分别为目标检测模块、语义分割模块以及数字识别模块, 其中目标检测模块基于SSD (Single shot MultiBox dector)模型, 并对其进行了改进, 使其更适用于轨道交通中的小目标识别; 语义分割模块使用了全卷积的方式, 对目标检测的结果进一步处理, 准确得到路牌中的数字区域; 数字识别模块的设计参考了著名的识别MNIST数据集的手写体识别系统, 并针对路牌中数字的特点做了相应的改进, 实现了对每个数字的准确识别. 实验结果表明, 本系统可适应白天、夜间情况下轨道交通的路况, 识别的综合准确率为80.45 %, 其中, 白天的平均识别准确率为87.98 %, 夜间的平均识别准确率为72.92 %.
轨道交通在我国综合交通运输体系中占有重要的地位, 随着人工智能的发展, 智能感知轨道交通周围环境的信息也变得越来越引人注目. 本文结合深度学习与图像处理的方法, 设计并实现了一种基于卷积神经网络的高铁轨道周边路牌数字识别的智能系统, 该系统通过在高铁驾驶室内安装摄像头的方式采集运行前方的视频, 并通过目标识别、语义分割等深度学习算法自动定位并识别路牌内的数字, 从而解决了之前人工处理的繁琐和低效率.本算法整体系统由三个子模块构成, 分别为目标检测模块、语义分割模块以及数字识别模块, 其中目标检测模块基于SSD (Single shot MultiBox dector)模型, 并对其进行了改进, 使其更适用于轨道交通中的小目标识别; 语义分割模块使用了全卷积的方式, 对目标检测的结果进一步处理, 准确得到路牌中的数字区域; 数字识别模块的设计参考了著名的识别MNIST数据集的手写体识别系统, 并针对路牌中数字的特点做了相应的改进, 实现了对每个数字的准确识别. 实验结果表明, 本系统可适应白天、夜间情况下轨道交通的路况, 识别的综合准确率为80.45 %, 其中, 白天的平均识别准确率为87.98 %, 夜间的平均识别准确率为72.92 %.








2020, 46(3): 531-539.
doi: 10.16383/j.aas.c180212
摘要:
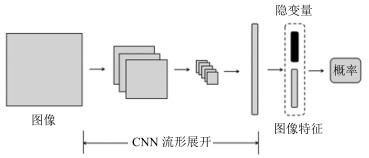
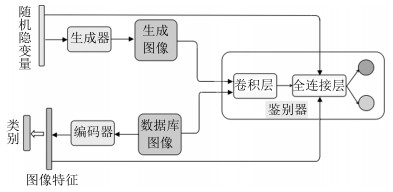
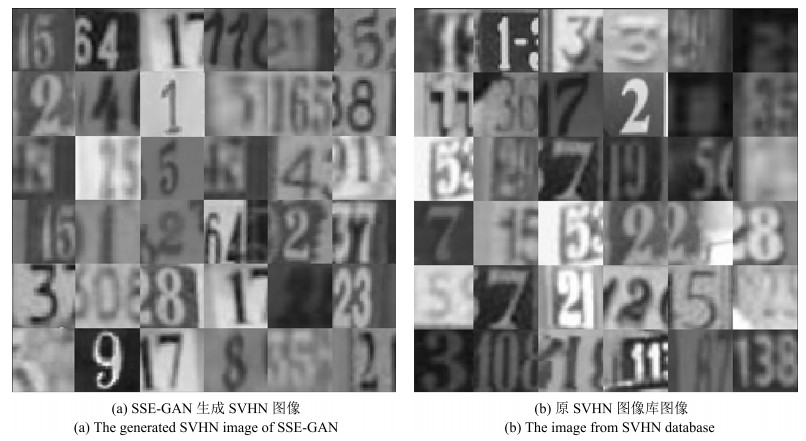
在实际应用中, 为分类模型提供大量的人工标签越来越困难, 因此, 近几年基于半监督的图像分类问题获得了越来越多的关注.而大量实验表明, 在生成对抗网络(Generative adversarial network, GANs)的训练过程中, 引入少量的标签数据能获得更好的分类效果, 但在该类模型的框架中并没有考虑用于提取图像特征的结构, 为了进一步利用其模型的学习能力, 本文提出一种新的半监督分类模型.该模型在原生成对抗网络模型中添加了一个编码器结构, 用于直接提取图像特征, 并构造了一种新的半监督训练方式, 获得了突出的分类效果.本模型分别在标准的手写体识别数据库MNIST、街牌号数据库SVHN和自然图像数据库CIFAR-10上完成了数值实验, 并与其他半监督模型进行了对比, 结果表明本文所提模型在使用少量带标数据情况下得到了更高的分类精度.
在实际应用中, 为分类模型提供大量的人工标签越来越困难, 因此, 近几年基于半监督的图像分类问题获得了越来越多的关注.而大量实验表明, 在生成对抗网络(Generative adversarial network, GANs)的训练过程中, 引入少量的标签数据能获得更好的分类效果, 但在该类模型的框架中并没有考虑用于提取图像特征的结构, 为了进一步利用其模型的学习能力, 本文提出一种新的半监督分类模型.该模型在原生成对抗网络模型中添加了一个编码器结构, 用于直接提取图像特征, 并构造了一种新的半监督训练方式, 获得了突出的分类效果.本模型分别在标准的手写体识别数据库MNIST、街牌号数据库SVHN和自然图像数据库CIFAR-10上完成了数值实验, 并与其他半监督模型进行了对比, 结果表明本文所提模型在使用少量带标数据情况下得到了更高的分类精度.


2020, 46(3): 540-548.
doi: 10.16383/j.aas.2018.c180230
摘要:
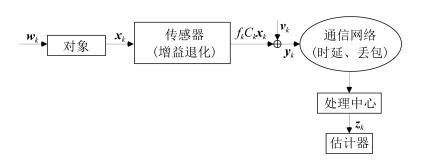
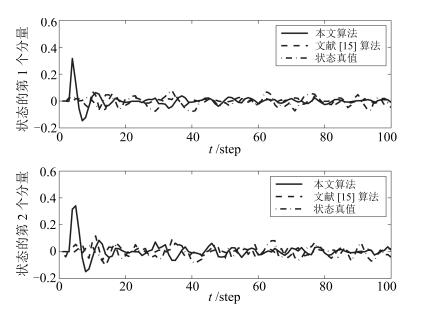
研究了具有传感器增益退化、数据传输时延和丢包的网络化状态估计问题, 传感器增益退化现象通过统计特性已知的随机变量来描述, 数据包时延和丢失发生于传感器量测输出向远程处理中心传送过程中, 将各时延的发生描述为随机过程, 在远程处理中心端建立只存储最新时刻数据包的时延-丢包模型, 考虑到利用每一时刻实时的时延值和丢包情况, 设计了一种离线的无偏估计器, 推导出最小方差原则下的离线最优估计器增益.最后, 通过算例仿真验证所设计离线状态估计器的有效性.
研究了具有传感器增益退化、数据传输时延和丢包的网络化状态估计问题, 传感器增益退化现象通过统计特性已知的随机变量来描述, 数据包时延和丢失发生于传感器量测输出向远程处理中心传送过程中, 将各时延的发生描述为随机过程, 在远程处理中心端建立只存储最新时刻数据包的时延-丢包模型, 考虑到利用每一时刻实时的时延值和丢包情况, 设计了一种离线的无偏估计器, 推导出最小方差原则下的离线最优估计器增益.最后, 通过算例仿真验证所设计离线状态估计器的有效性.

2020, 46(3): 549-561.
doi: 10.16383/j.aas.c170724
摘要:
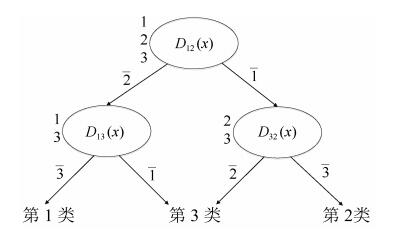
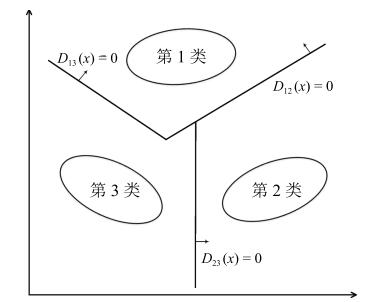
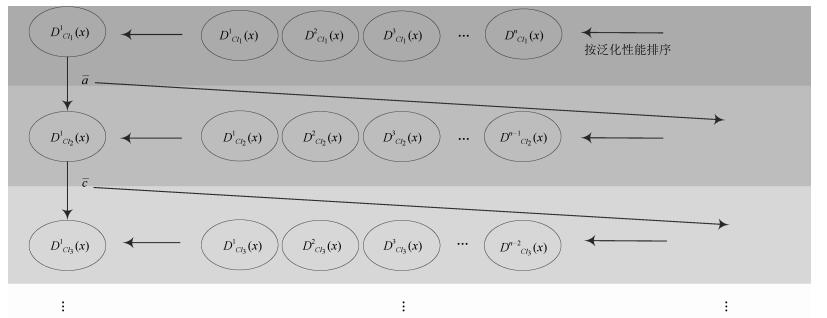
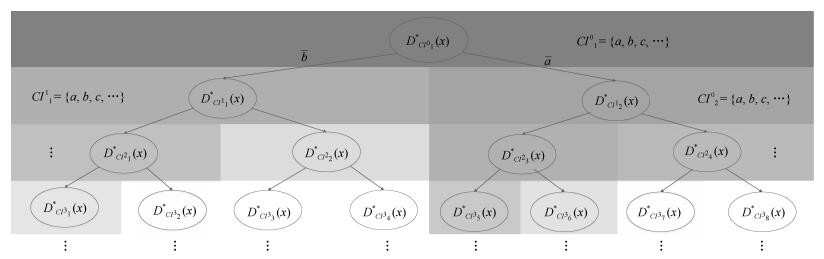
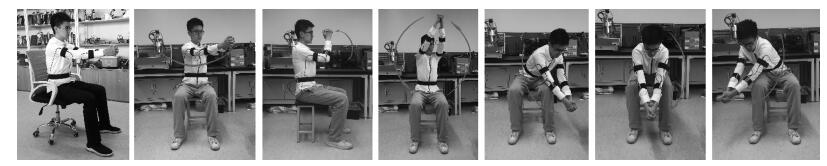
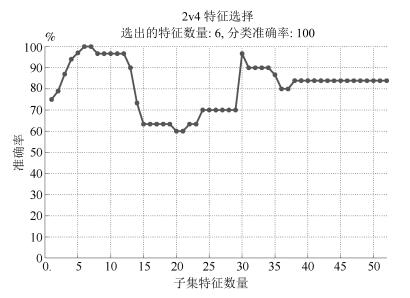
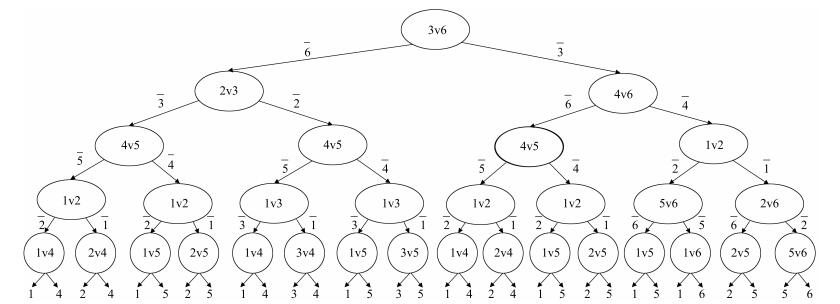
针对上肢康复训练系统中训练评估方法核心的动作识别问题, 提出一种面向Brunnstrom 4~5期患者上肢康复训练动作的SODDAG-SVM (Structure-optimized decision directed acyclic graph-support vector machine)多分类识别方法.首先将多分类问题分解成一组二分类问题, 并使用支持向量机构建各二分类器, 分别采用遗传算法和特征子集区分度准则对各二分类器的核函数参数及特征子集进行优化.然后使用类对的SVM二分类器泛化误差来衡量每个类对的易被分离程度, 并由其建立类对泛化误差上三角矩阵.最后由根节点开始, 依次根据各节点的泛化误差矩阵, 通过选择其中最易被分离类对的SVM分类器构成该节点的方式, 来构建SODDAG-SVM多分类器结构.当待预测的实例较少时, 直接构建实例经过的SODDAG-SVM部分结构并对实例进行预测; 当待预测的实例较多时, 先构建完整的SODDAG-SVM结构, 再代入所有实例进行预测.通过人体传感技术获得Brunnstrom 4~5阶段上肢康复训练的常用动作样本集, 进行SODDAG-SVM动作识别实验, 准确率达到了95.49%, 结果均优于常规的决策有向无环图(Decision directed acyceic graph, DDAG)和MaxWins方法, 实验表明本文方法能有效地提高上肢康复训练动作识别的准确率.
针对上肢康复训练系统中训练评估方法核心的动作识别问题, 提出一种面向Brunnstrom 4~5期患者上肢康复训练动作的SODDAG-SVM (Structure-optimized decision directed acyclic graph-support vector machine)多分类识别方法.首先将多分类问题分解成一组二分类问题, 并使用支持向量机构建各二分类器, 分别采用遗传算法和特征子集区分度准则对各二分类器的核函数参数及特征子集进行优化.然后使用类对的SVM二分类器泛化误差来衡量每个类对的易被分离程度, 并由其建立类对泛化误差上三角矩阵.最后由根节点开始, 依次根据各节点的泛化误差矩阵, 通过选择其中最易被分离类对的SVM分类器构成该节点的方式, 来构建SODDAG-SVM多分类器结构.当待预测的实例较少时, 直接构建实例经过的SODDAG-SVM部分结构并对实例进行预测; 当待预测的实例较多时, 先构建完整的SODDAG-SVM结构, 再代入所有实例进行预测.通过人体传感技术获得Brunnstrom 4~5阶段上肢康复训练的常用动作样本集, 进行SODDAG-SVM动作识别实验, 准确率达到了95.49%, 结果均优于常规的决策有向无环图(Decision directed acyceic graph, DDAG)和MaxWins方法, 实验表明本文方法能有效地提高上肢康复训练动作识别的准确率.

2020, 46(3): 562-575.
doi: 10.16383/j.aas.c170612
摘要:
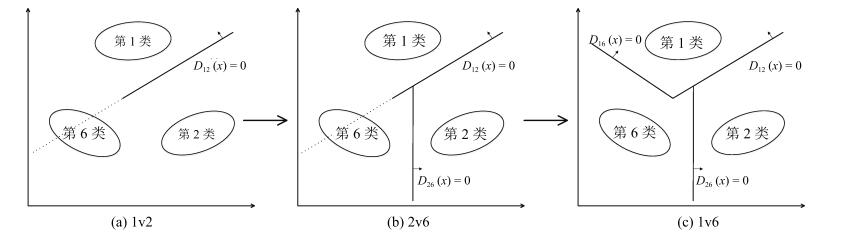
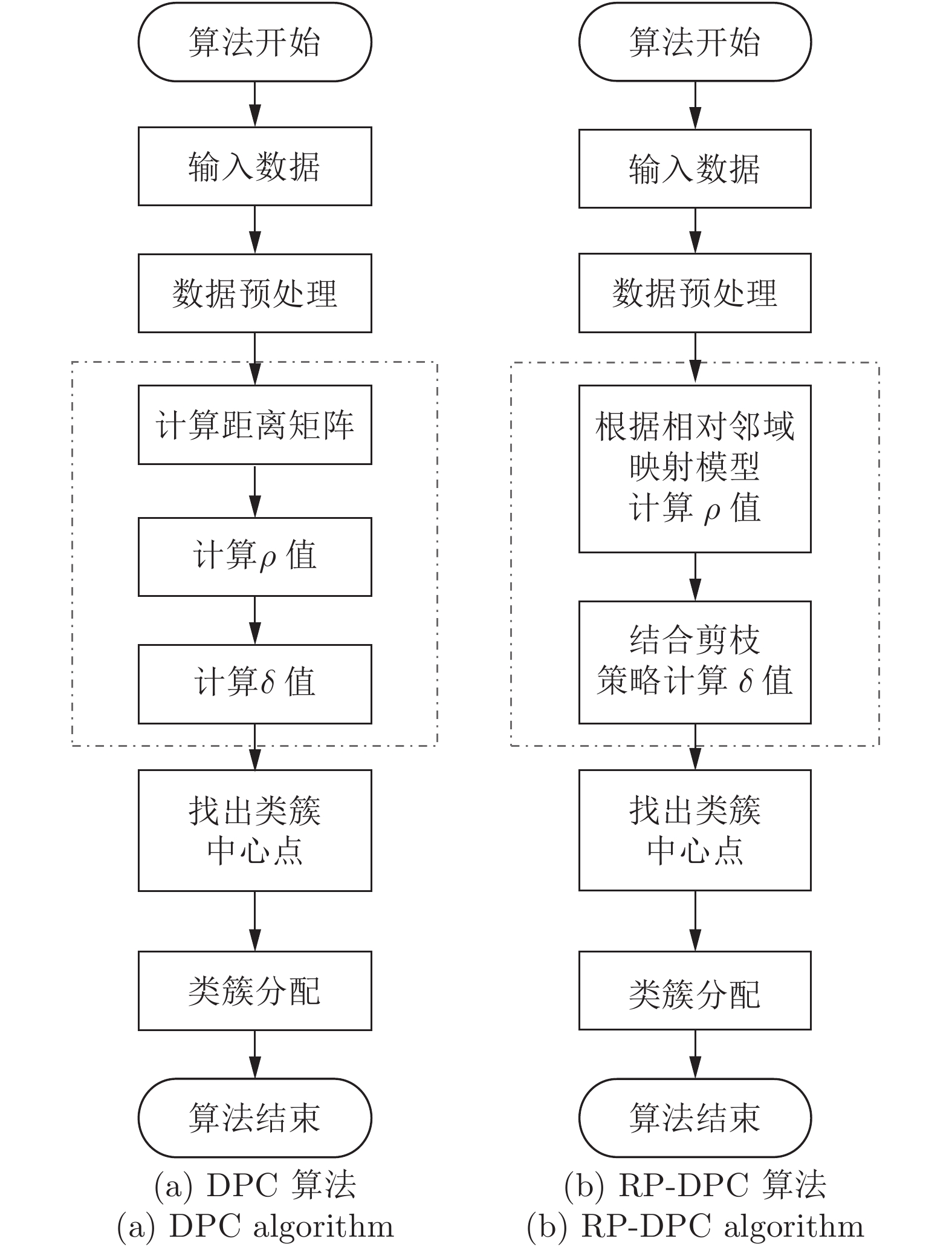
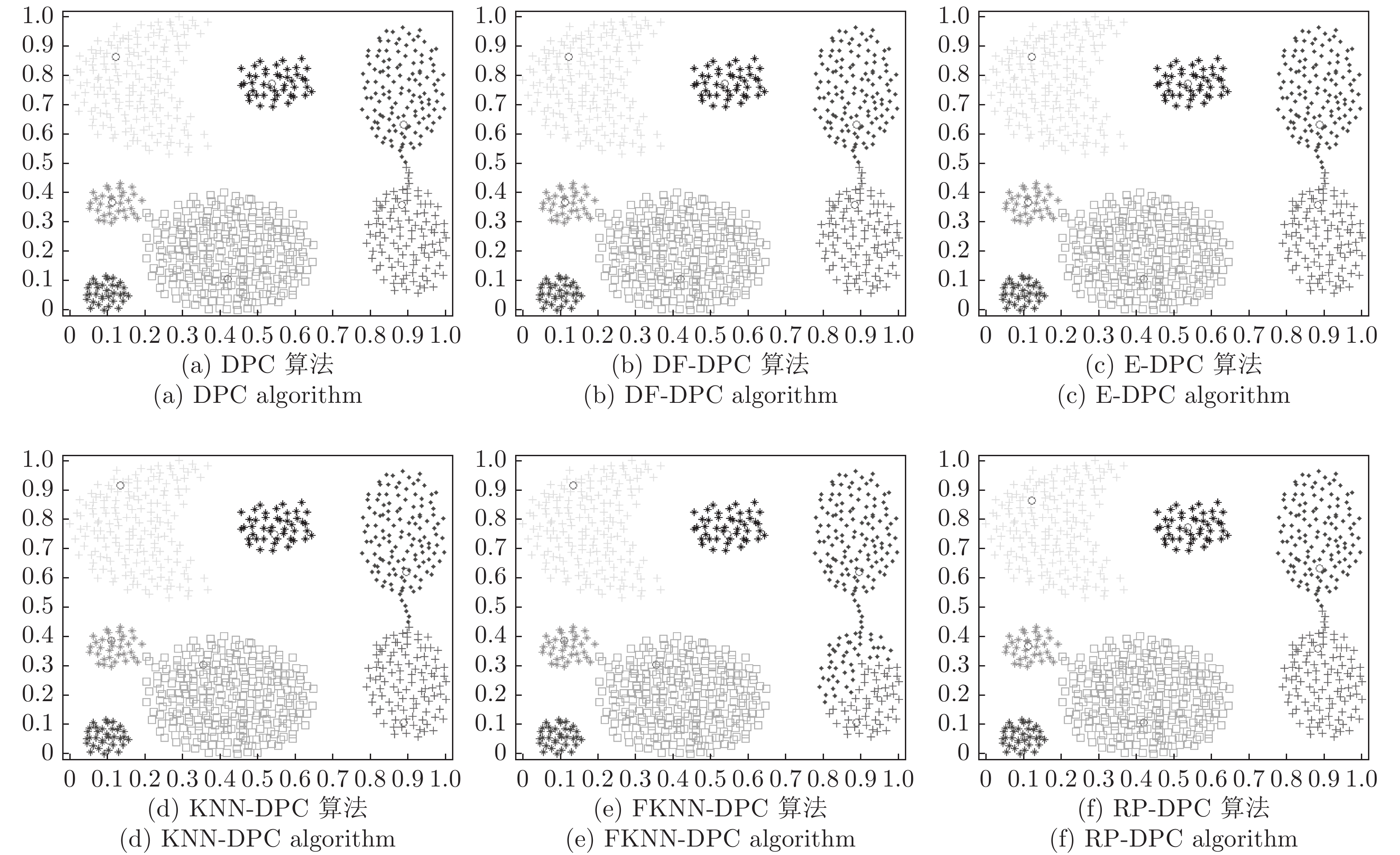
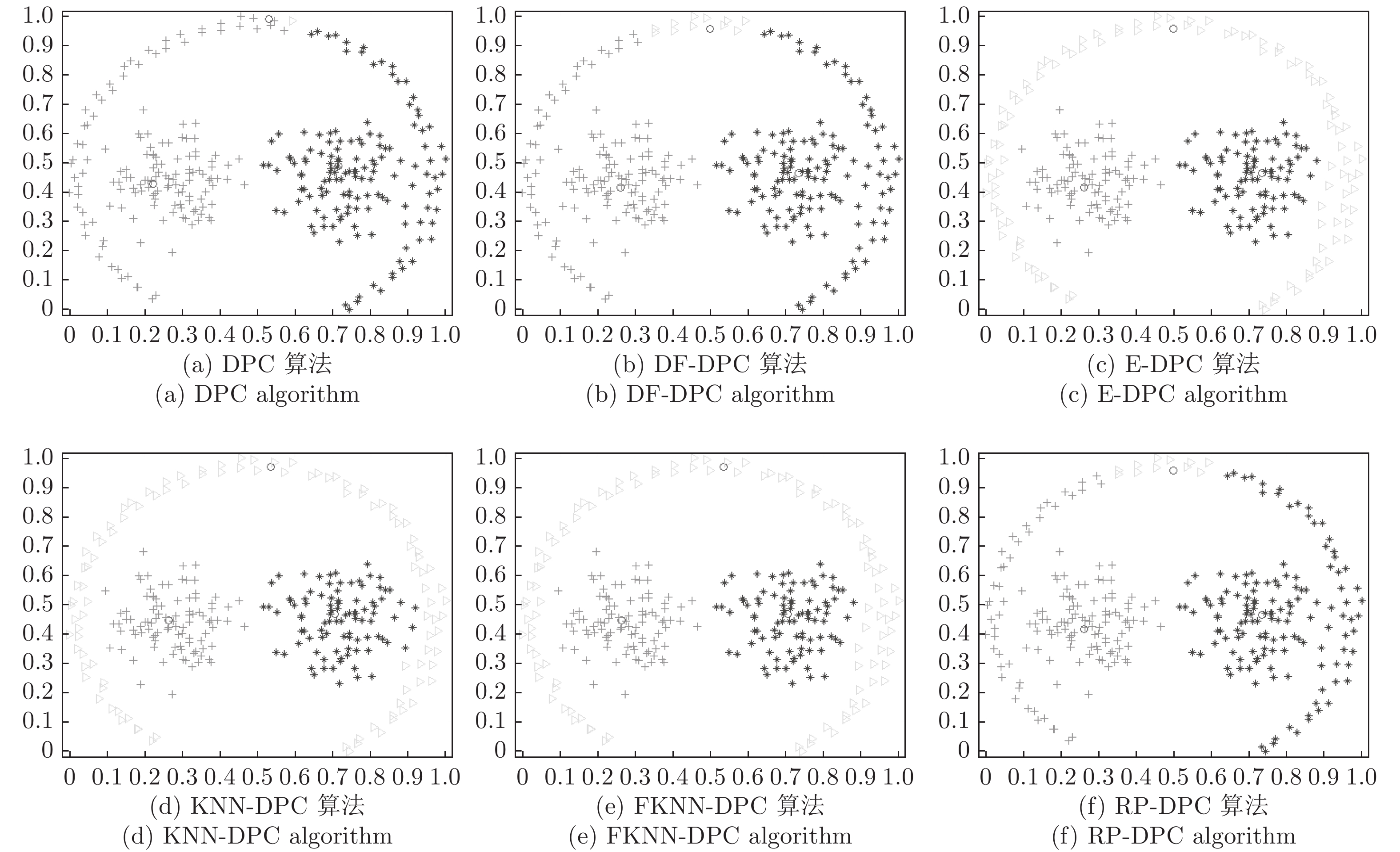
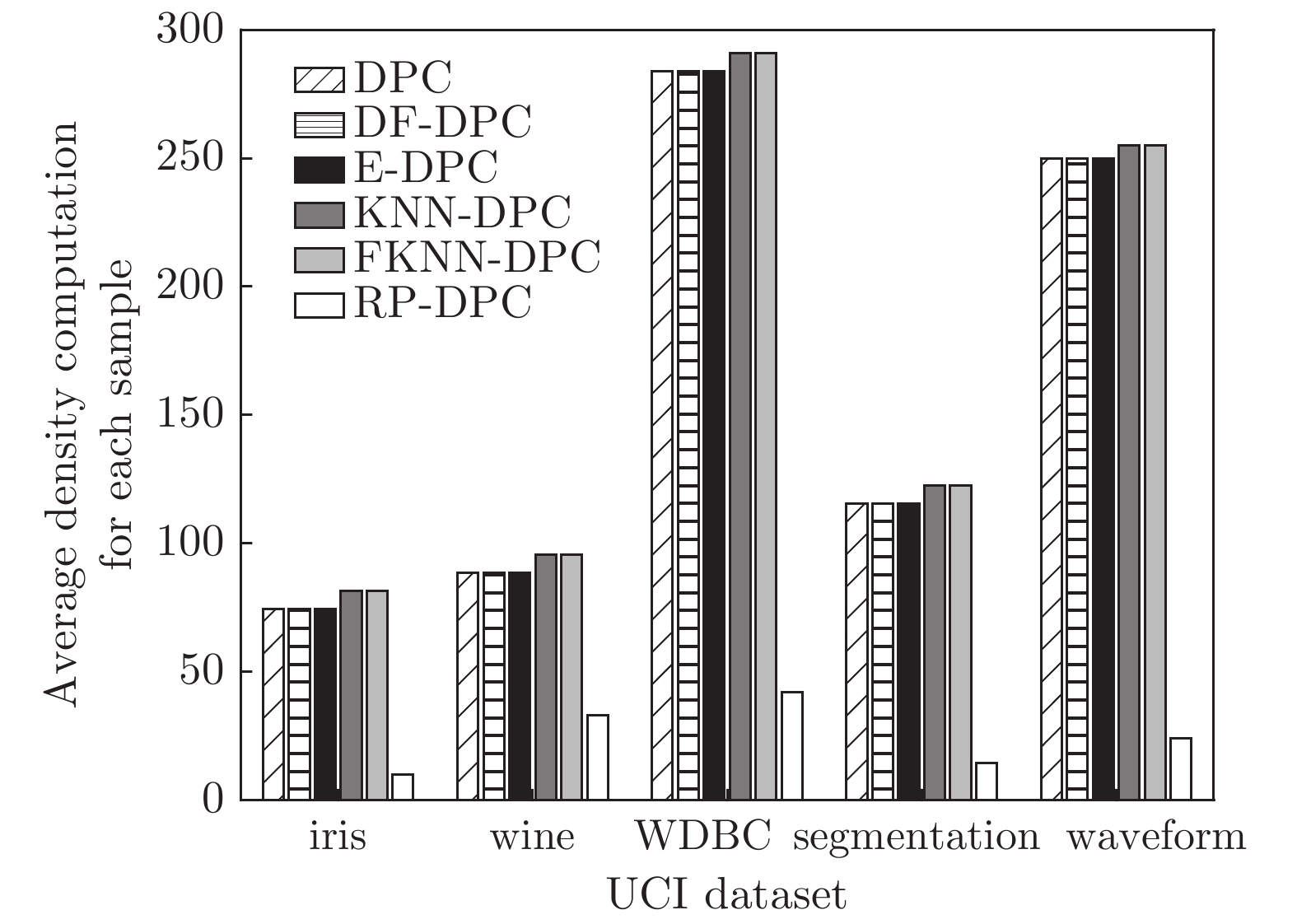
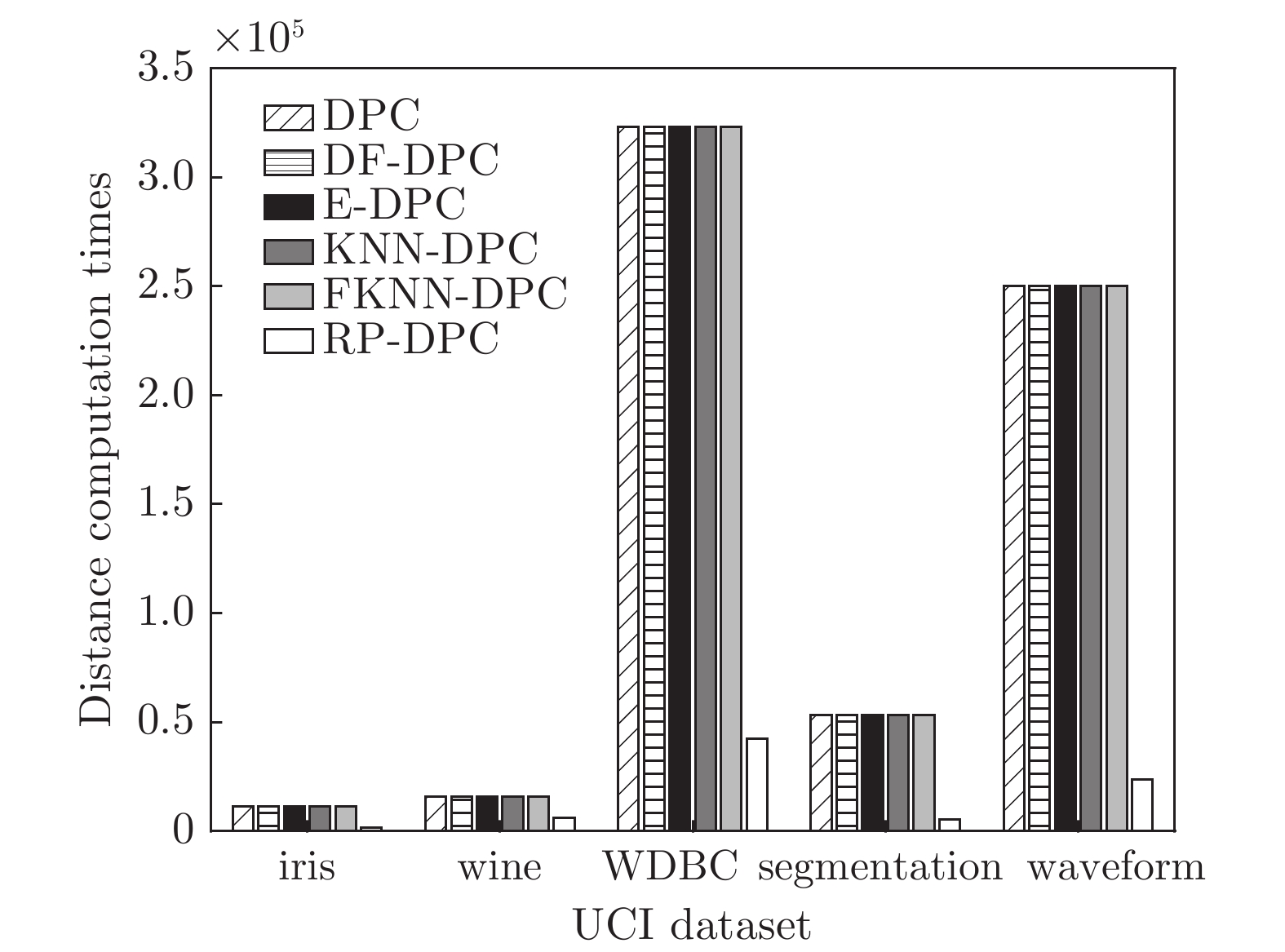
针对Science发表的密度峰值聚类(Density peaks clustering, DPC)算法及其改进算法效率不高的缺陷, 提出一种相对邻域和剪枝策略优化的密度峰值聚类(Relative neighborhood and pruning strategy optimized DPC, RP-DPC)算法. DPC聚类算法主要有两个阶段: 聚类中心点的确定和非聚类中心点样本的类簇分配, 并且时间复杂度集中在第1个阶段, 因此RP-DPC算法针对该阶段做出改进研究. RP-DPC算法去掉了DPC算法预先计算距离矩阵的步骤, 首先利用相对距离将样本映射到相对邻域中, 再从相对邻域来计算各样本的密度, 从而缩小各样本距离计算及密度统计的范围; 然后在计算各样本的δ值时加入剪枝策略, 将大量被剪枝样本δ值的计算范围从样本集缩小至邻域以内, 极大地提高了算法的效率. 理论分析和在人工数据集及UCI数据集的对比实验均表明, 与DPC算法及其改进算法相比, RP-DPC算法在保证聚类质量的同时可以实现有效的时间性能提升.
针对Science发表的密度峰值聚类(Density peaks clustering, DPC)算法及其改进算法效率不高的缺陷, 提出一种相对邻域和剪枝策略优化的密度峰值聚类(Relative neighborhood and pruning strategy optimized DPC, RP-DPC)算法. DPC聚类算法主要有两个阶段: 聚类中心点的确定和非聚类中心点样本的类簇分配, 并且时间复杂度集中在第1个阶段, 因此RP-DPC算法针对该阶段做出改进研究. RP-DPC算法去掉了DPC算法预先计算距离矩阵的步骤, 首先利用相对距离将样本映射到相对邻域中, 再从相对邻域来计算各样本的密度, 从而缩小各样本距离计算及密度统计的范围; 然后在计算各样本的δ值时加入剪枝策略, 将大量被剪枝样本δ值的计算范围从样本集缩小至邻域以内, 极大地提高了算法的效率. 理论分析和在人工数据集及UCI数据集的对比实验均表明, 与DPC算法及其改进算法相比, RP-DPC算法在保证聚类质量的同时可以实现有效的时间性能提升.





2020, 46(3): 576-584.
doi: 10.16383/j.aas.c180054
摘要:
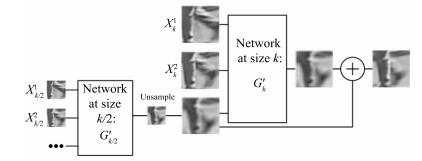
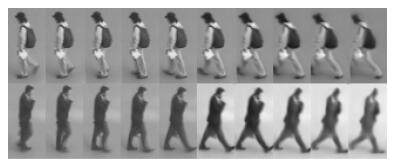
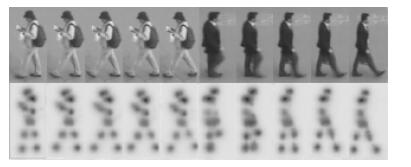
随着国家对社会公共安全的日益重视, 无重叠视域监控系统已大规模的普及.行人再识别任务通过匹配不同视域摄像机下的行人目标, 在当今环境下显得尤为重要.由于深度学习依赖大数据解决过拟合的特性, 针对当前视频行人再识别数据量较小和学习特征单一的问题, 我们提出了一种基于视频的改进行人再识别方法, 该方法通过生成对抗网络去生成视频帧序列来增加样本数量和加入了行人关节点的特征信息去提升模型效率.实验结果表明, 本文提出的改进方法可以有效地提高公开数据集的识别率, 在PRID2011, iLIDS-VID数据集上进行实验, Rank 1分别达到了80.2%和66.3 %.
随着国家对社会公共安全的日益重视, 无重叠视域监控系统已大规模的普及.行人再识别任务通过匹配不同视域摄像机下的行人目标, 在当今环境下显得尤为重要.由于深度学习依赖大数据解决过拟合的特性, 针对当前视频行人再识别数据量较小和学习特征单一的问题, 我们提出了一种基于视频的改进行人再识别方法, 该方法通过生成对抗网络去生成视频帧序列来增加样本数量和加入了行人关节点的特征信息去提升模型效率.实验结果表明, 本文提出的改进方法可以有效地提高公开数据集的识别率, 在PRID2011, iLIDS-VID数据集上进行实验, Rank 1分别达到了80.2%和66.3 %.


2020, 46(3): 585-593.
doi: 10.16383/j.aas.2018.c170604
摘要:
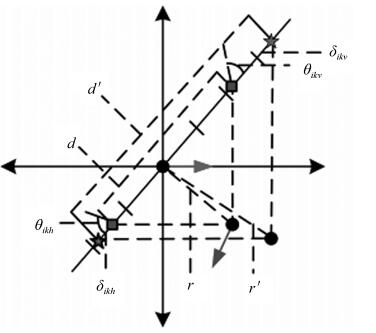
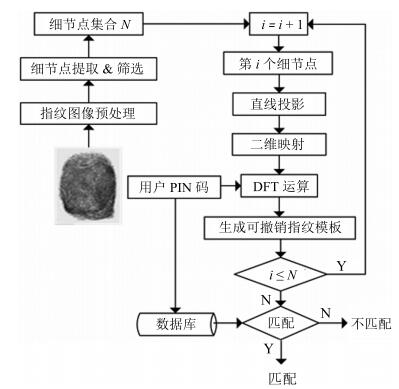
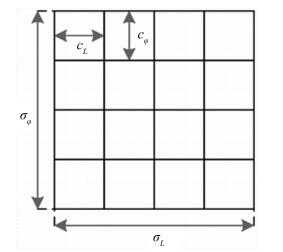
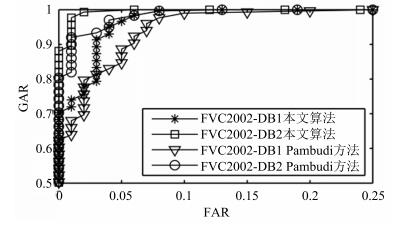
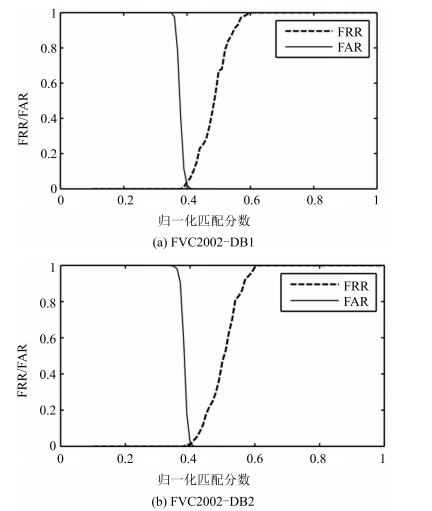
为了改善指纹模板保护算法的可撤销性、不可逆性等性能, 设计了一种基于细节点投影的可撤销指纹模板生成算法.首先对指纹图像进行预处理, 提取指纹的细节点特征, 并筛选出采样半径范围内的有效细节点, 然后对细节点进行直线投影, 将投影后的向量映射到二维网格, 生成固定长度的一维比特串, 再结合用户PIN码生成可撤销指纹模板.在指纹数据库FVC2002-DB1和DB2上的实验结果表明, 该算法不仅提高了指纹模板认证的稳定性, 而且在可撤销性、不可逆性和安全性等方面均具有较好性能.
为了改善指纹模板保护算法的可撤销性、不可逆性等性能, 设计了一种基于细节点投影的可撤销指纹模板生成算法.首先对指纹图像进行预处理, 提取指纹的细节点特征, 并筛选出采样半径范围内的有效细节点, 然后对细节点进行直线投影, 将投影后的向量映射到二维网格, 生成固定长度的一维比特串, 再结合用户PIN码生成可撤销指纹模板.在指纹数据库FVC2002-DB1和DB2上的实验结果表明, 该算法不仅提高了指纹模板认证的稳定性, 而且在可撤销性、不可逆性和安全性等方面均具有较好性能.






2020, 46(3): 594-599.
doi: 10.16383/j.aas.c180080
摘要:
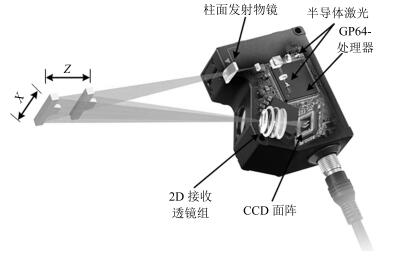
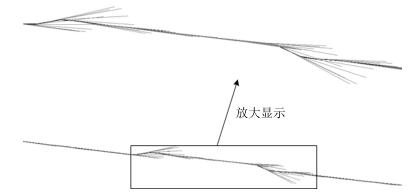
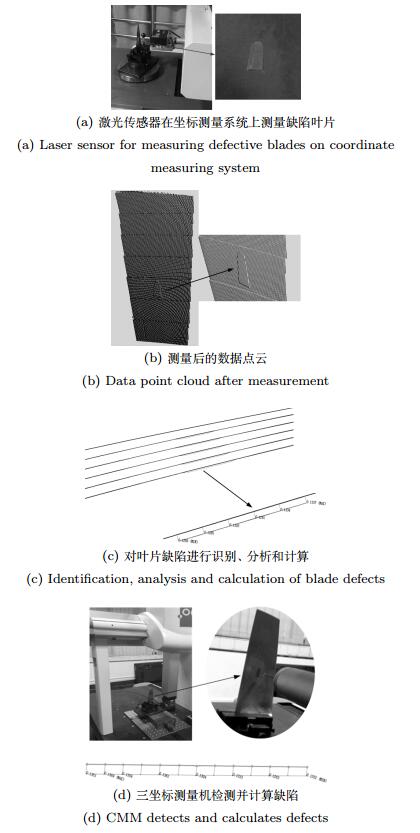
针对航发叶片修复检测的应用, 提出了一种基于截面线一阶导矢法的叶片型面缺陷识别方法.该方法是以等高线法处理测量点云中的截面数据, 通过B样条插值函数拟合成光滑曲线; 再由B样条曲线的一阶导矢公式求出每个测点的一阶导数, 然后以点斜公式求出截面曲线上各个测点的切线; 如果曲线光滑, 曲线上测点的斜率变化在两端点斜率值之间, 否则表明曲线上有缺陷存在; 根据k-d树的最近点搜索算法, 遍历整个叶盆(叶背)就可以找到叶盆(叶背)上的缺陷区域.通过与三坐标测量实验比对, 该技术可以实现3 μm精度的缺陷识别.
针对航发叶片修复检测的应用, 提出了一种基于截面线一阶导矢法的叶片型面缺陷识别方法.该方法是以等高线法处理测量点云中的截面数据, 通过B样条插值函数拟合成光滑曲线; 再由B样条曲线的一阶导矢公式求出每个测点的一阶导数, 然后以点斜公式求出截面曲线上各个测点的切线; 如果曲线光滑, 曲线上测点的斜率变化在两端点斜率值之间, 否则表明曲线上有缺陷存在; 根据k-d树的最近点搜索算法, 遍历整个叶盆(叶背)就可以找到叶盆(叶背)上的缺陷区域.通过与三坐标测量实验比对, 该技术可以实现3 μm精度的缺陷识别.

2020, 46(3): 600-612.
doi: 10.16383/j.aas.c180430
摘要:
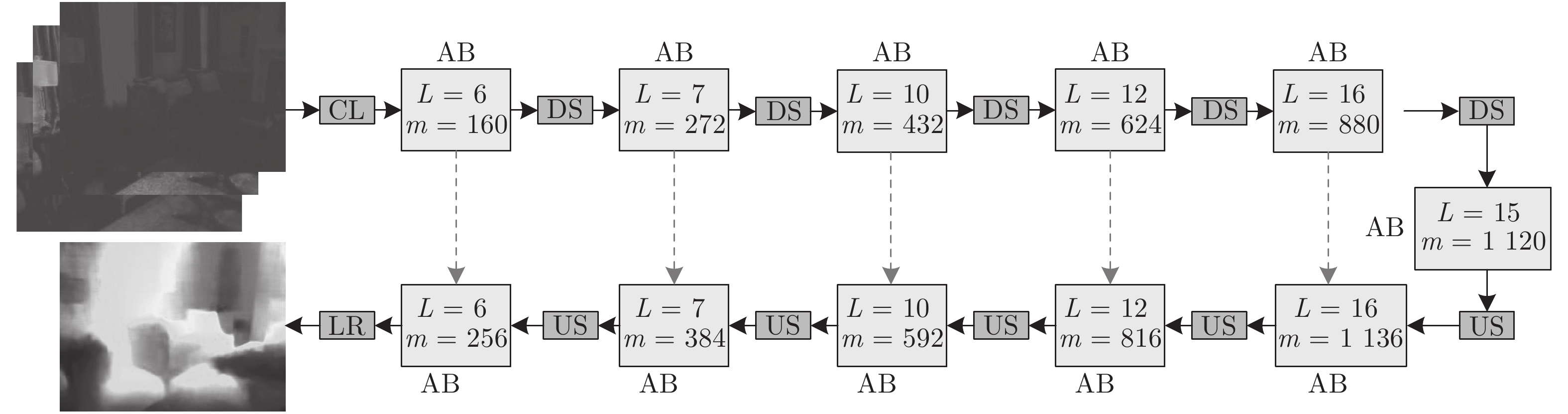
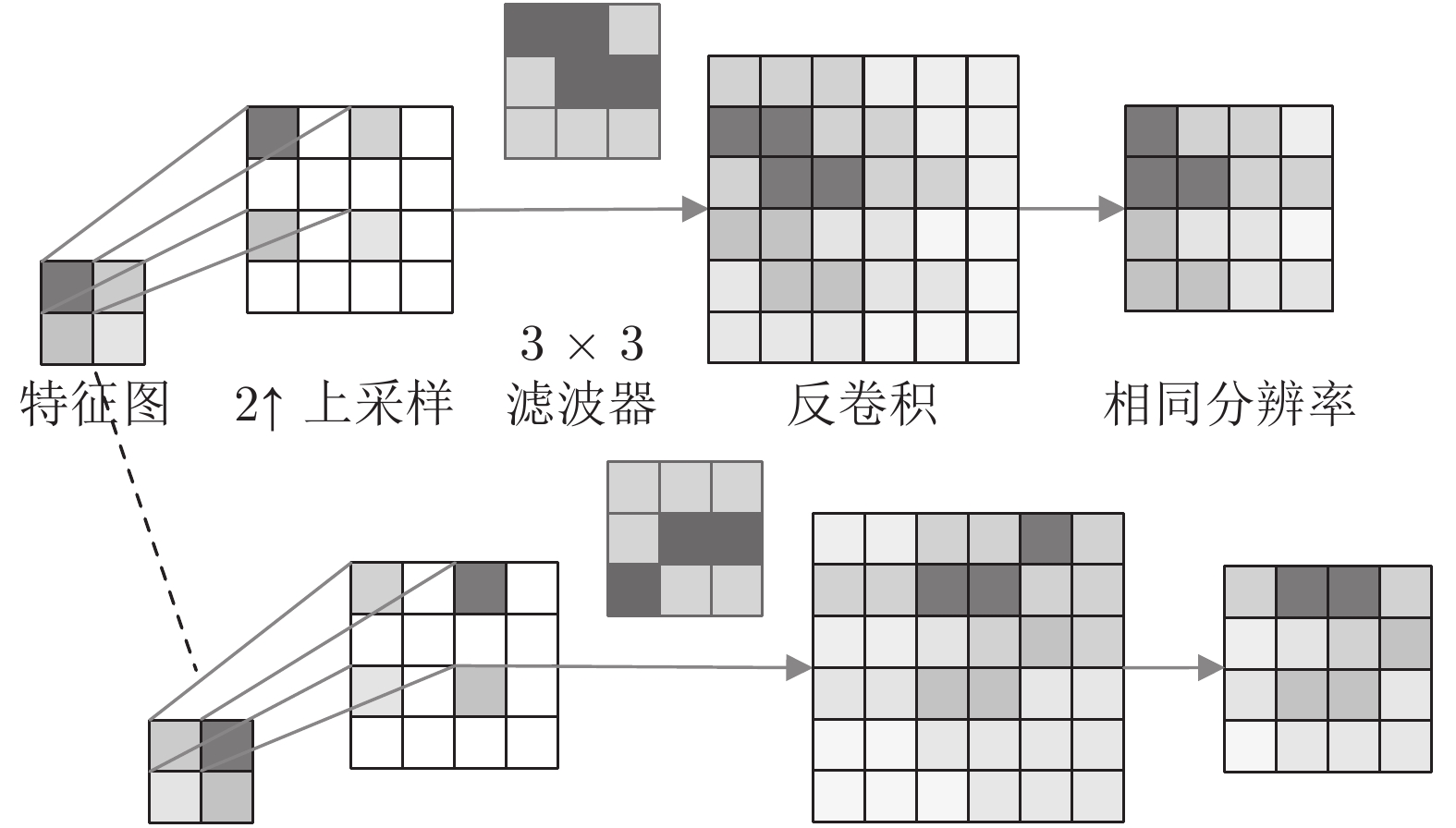
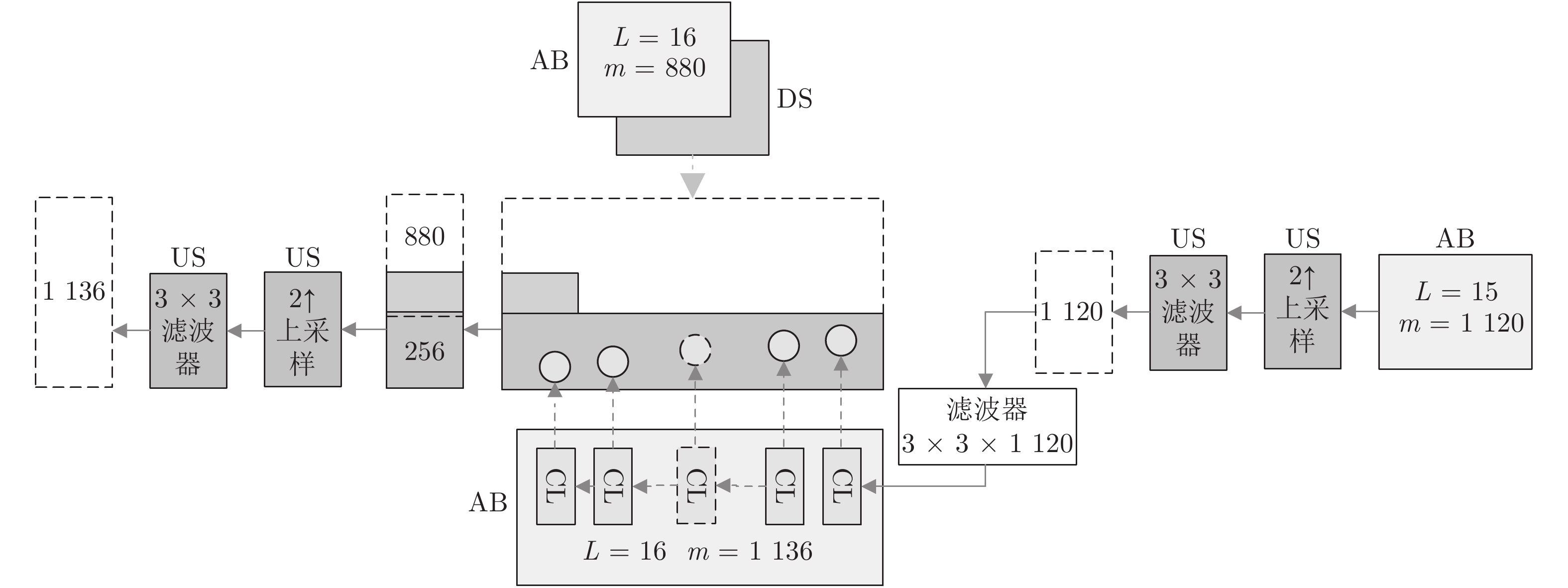
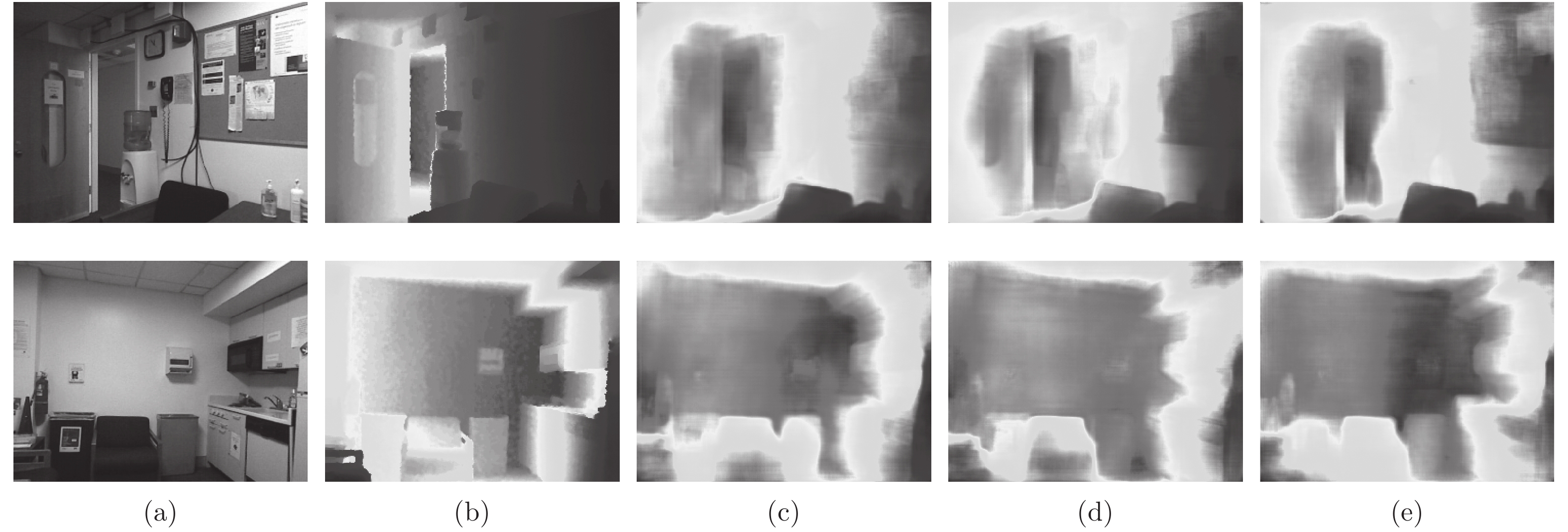
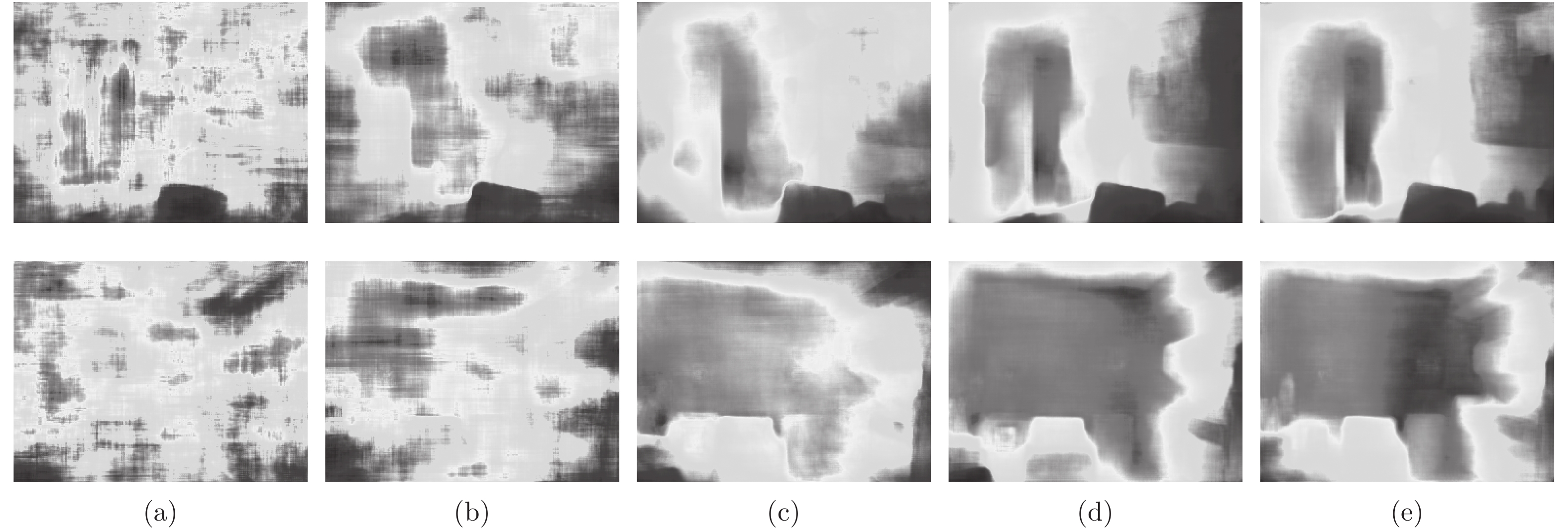
针对现有场景深度估计方法中, 由于下采样操作引起的复杂物体边界定位不准确, 而造成物体边界处的场景深度估计模糊的问题, 受密集网络中特征汇集过程的启发, 本文提出一种针对上/下采样过程的汇集网络模型. 在下采样过程中, 使用尺度特征汇集策略, 兼顾不同尺寸物体的估计; 在上采样过程中, 使用上采样反卷积恢复图像分辨率; 同时, 引入采样跨层汇集策略, 提供下采样过程中保存的物体边界的有效定位信息. 本文提出的采样汇集网络 (Sampling aggregate network, SAN) 中使用的尺度特征汇集和采样跨层汇集, 都可以有效缩短特征图到输出损失之间的路径, 从而有利于避免模型的参数优化时陷入局部最优解. 在公认场景深度估计NYU-Depth-v2数据集上的实验说明, 本文方法能够有效改善复杂物体边界等干扰情况下的场景深度估计效果, 并在深度估计误差和准确性上, 优于当前场景深度估计的主流方法.
针对现有场景深度估计方法中, 由于下采样操作引起的复杂物体边界定位不准确, 而造成物体边界处的场景深度估计模糊的问题, 受密集网络中特征汇集过程的启发, 本文提出一种针对上/下采样过程的汇集网络模型. 在下采样过程中, 使用尺度特征汇集策略, 兼顾不同尺寸物体的估计; 在上采样过程中, 使用上采样反卷积恢复图像分辨率; 同时, 引入采样跨层汇集策略, 提供下采样过程中保存的物体边界的有效定位信息. 本文提出的采样汇集网络 (Sampling aggregate network, SAN) 中使用的尺度特征汇集和采样跨层汇集, 都可以有效缩短特征图到输出损失之间的路径, 从而有利于避免模型的参数优化时陷入局部最优解. 在公认场景深度估计NYU-Depth-v2数据集上的实验说明, 本文方法能够有效改善复杂物体边界等干扰情况下的场景深度估计效果, 并在深度估计误差和准确性上, 优于当前场景深度估计的主流方法.