2020年 第46卷 第11期
2020, 46(11): 2239-2259.
doi: 10.16383/j.aas.c200358
摘要:
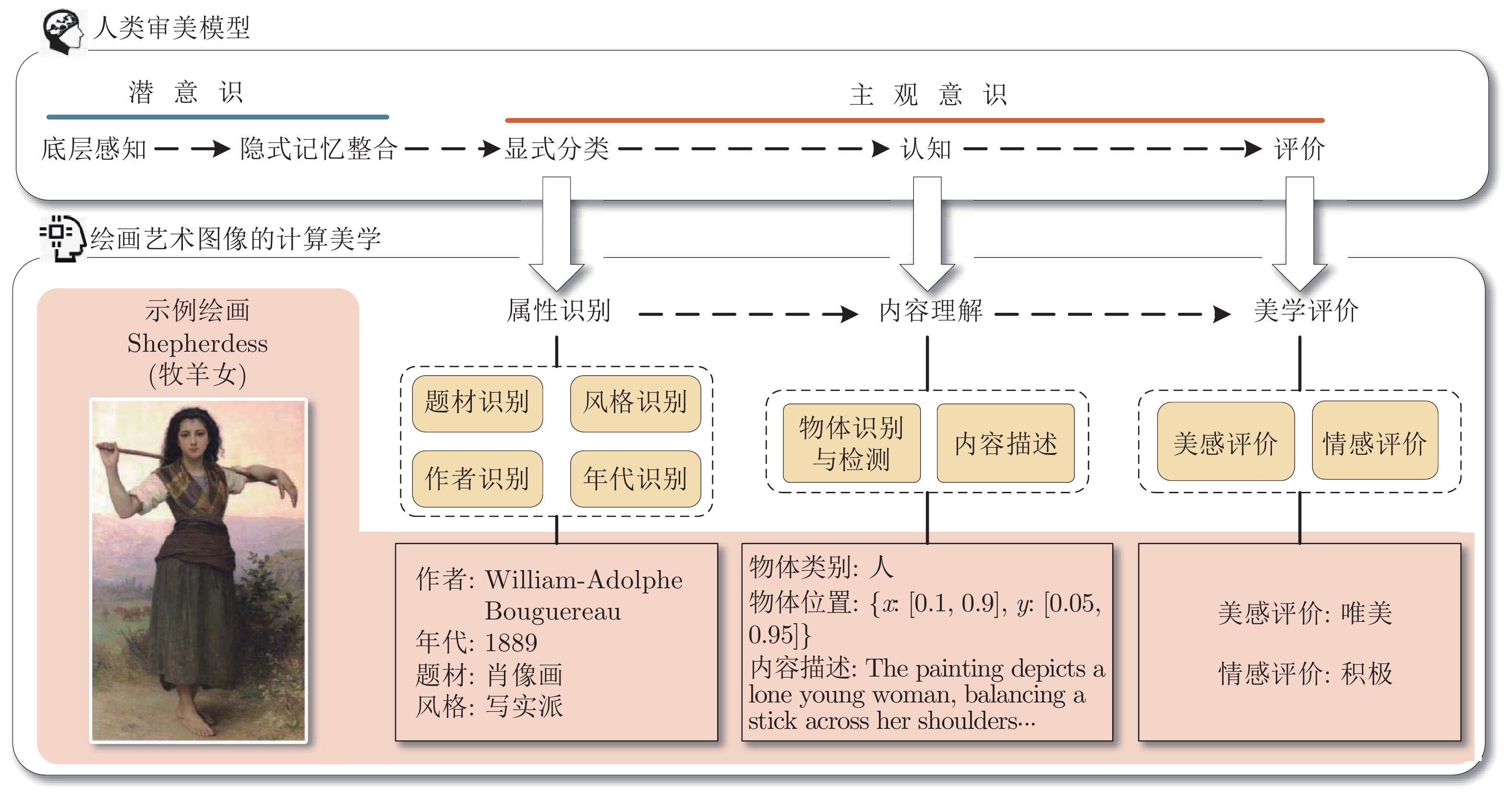
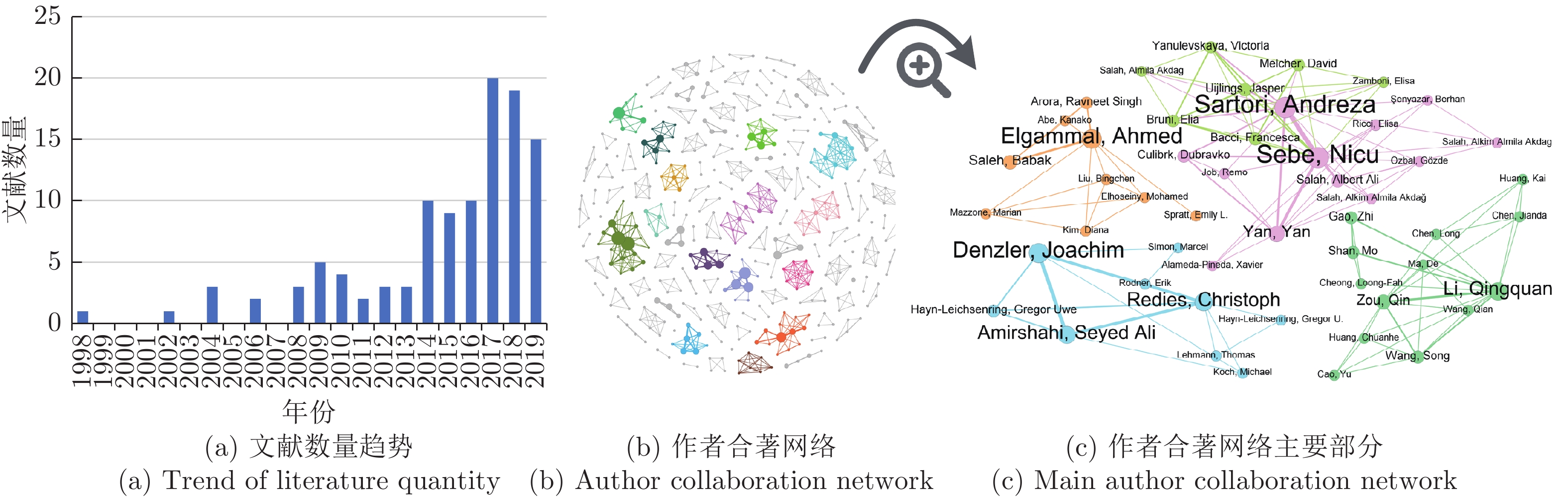
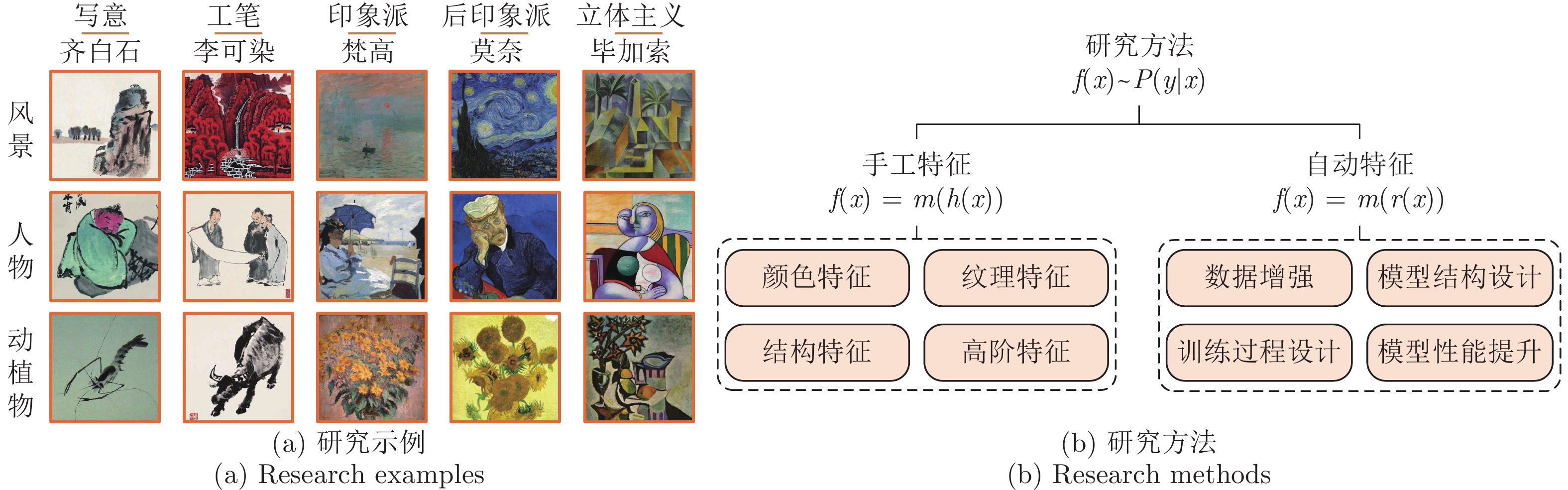
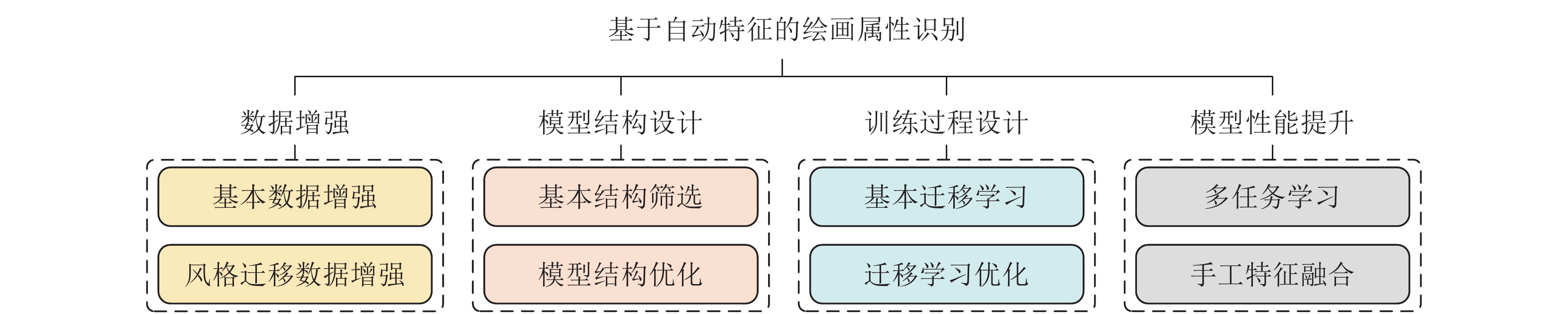
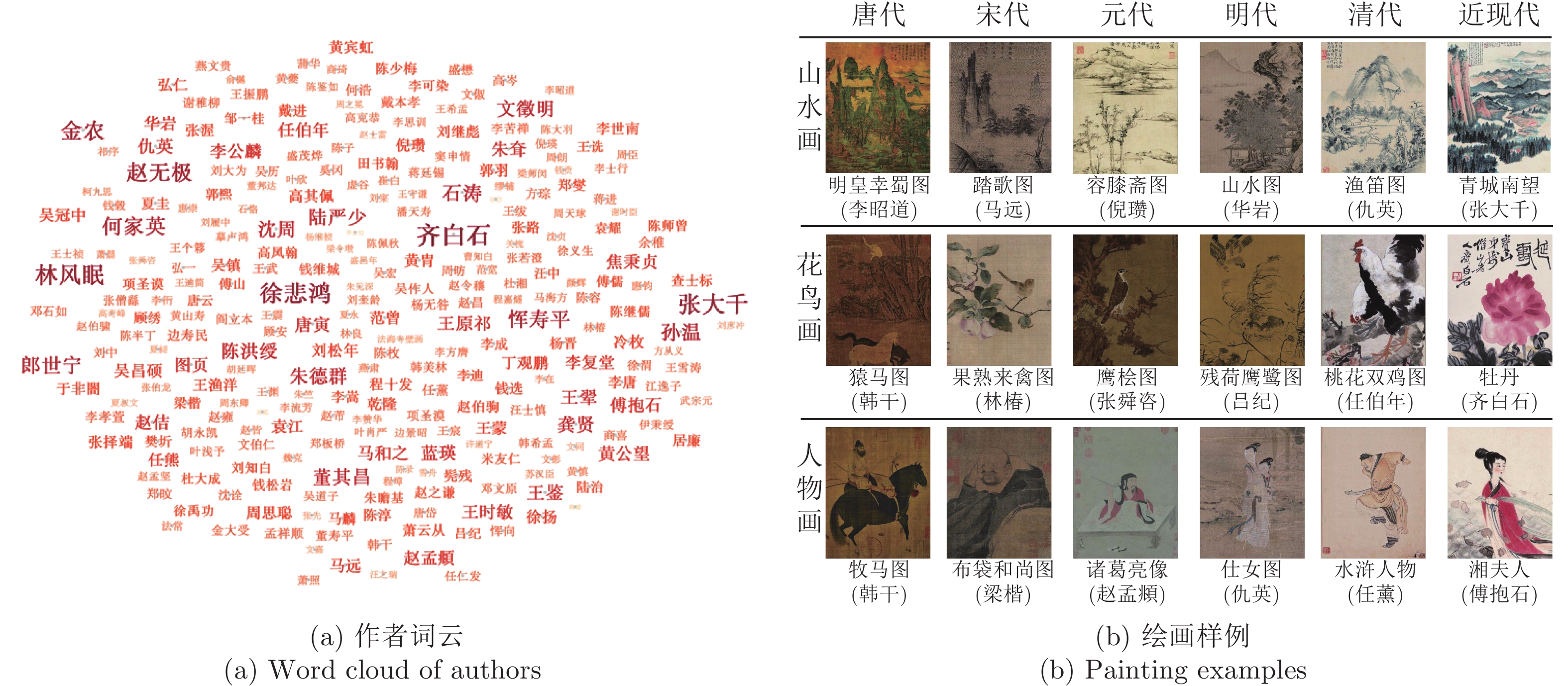
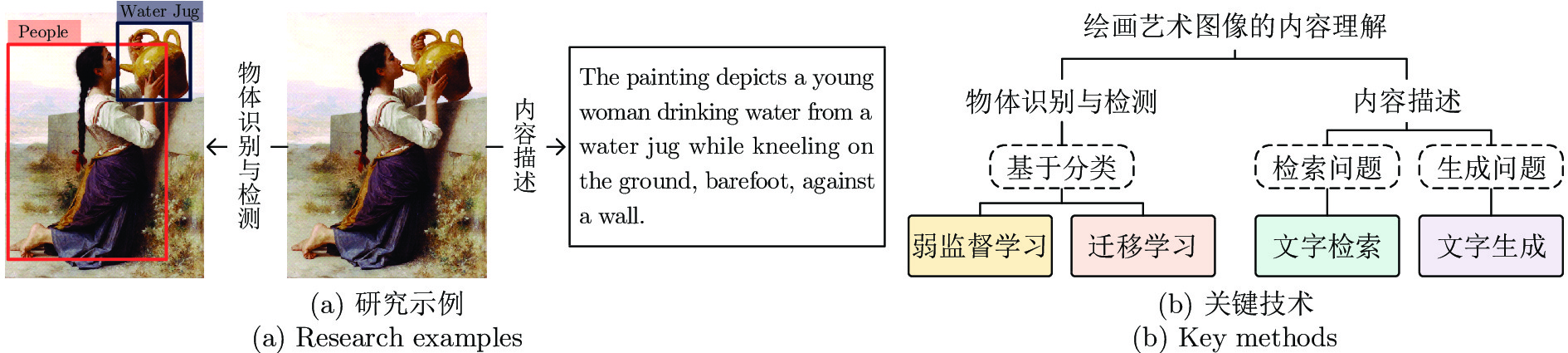
绘画艺术是人类艺术创作的重要组成部分, 绘画艺术图像的计算美学是利用机器实现可计算的人类审美过程, 其在大规模绘画的自动化分析和机器对感性的计算建模上具有重要的应用价值和科学意义. 针对其交叉学科的特点, 本文首次从人类审美的感知、认知和评价三个关键过程出发, 将绘画艺术图像的计算美学研究完整地归纳为属性识别、内容理解和美学评价三方面研究内容, 对其中的问题建模、数据获取和前沿方法等关键科学问题进行了归纳总结, 并对绘画计算美学的三方面研究内容进行了对比、思考和展望.
绘画艺术是人类艺术创作的重要组成部分, 绘画艺术图像的计算美学是利用机器实现可计算的人类审美过程, 其在大规模绘画的自动化分析和机器对感性的计算建模上具有重要的应用价值和科学意义. 针对其交叉学科的特点, 本文首次从人类审美的感知、认知和评价三个关键过程出发, 将绘画艺术图像的计算美学研究完整地归纳为属性识别、内容理解和美学评价三方面研究内容, 对其中的问题建模、数据获取和前沿方法等关键科学问题进行了归纳总结, 并对绘画计算美学的三方面研究内容进行了对比、思考和展望.

2020, 46(11): 2260-2274.
doi: 10.16383/j.aas.c190624
摘要:
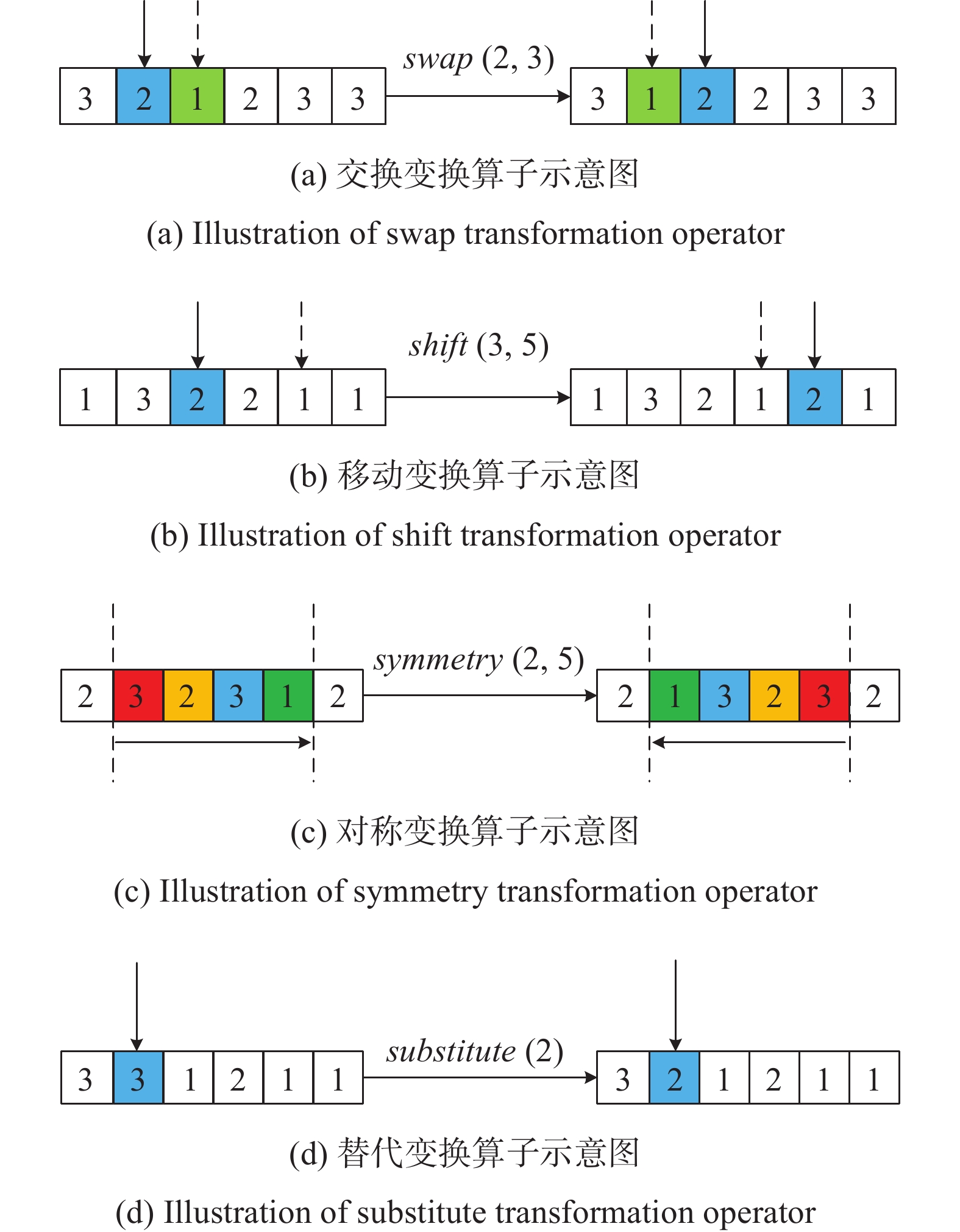
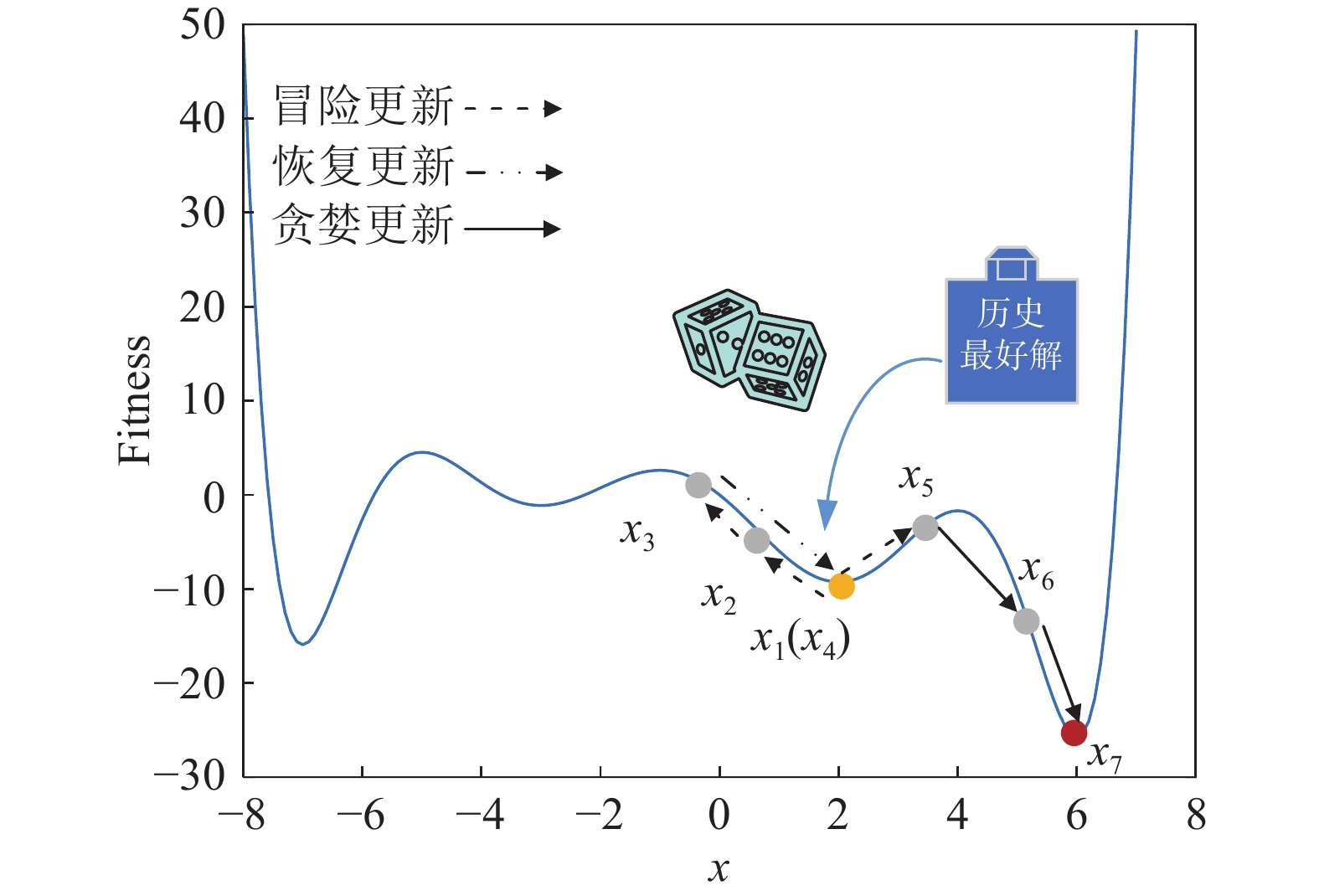
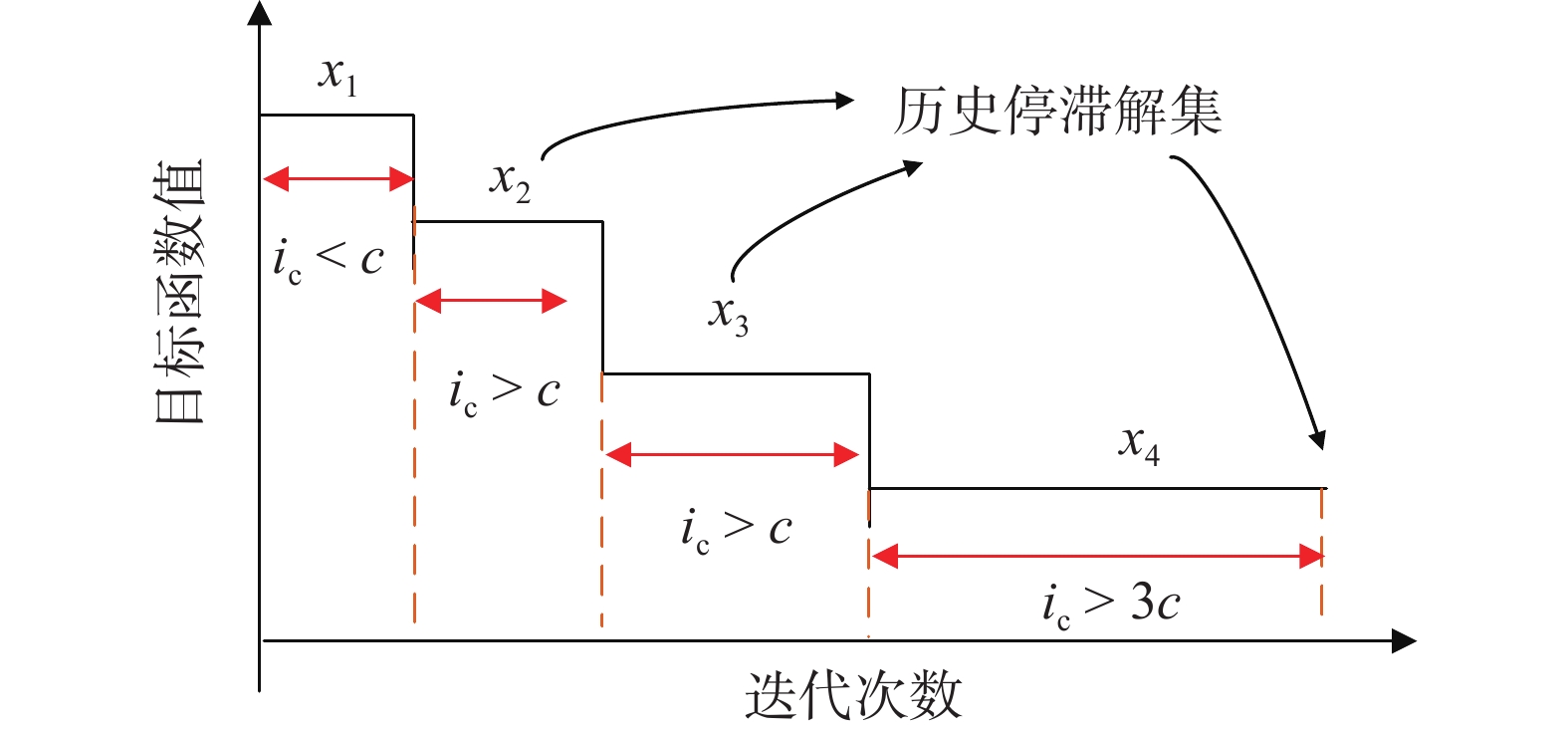
状态转移算法是基于状态和状态转移的概念及现代控制理论中状态空间表示法提出的一种智能型随机性全局优化方法, 由于其优良的全局搜索能力和快速收敛性, 在许多优化问题中得到了很好的应用. 本文系统地阐述了状态转移算法的基本原理和内在特性, 详细介绍了状态转移算法的演变与提升, 包括离散、约束与多目标状态转移算法, 状态转移算法参数分析与优化、算子拓展与智能化策略等内容, 并从非线性系统辨识、工业过程控制、机器学习与数据挖掘等方面重点介绍了状态转移算法的应用.
状态转移算法是基于状态和状态转移的概念及现代控制理论中状态空间表示法提出的一种智能型随机性全局优化方法, 由于其优良的全局搜索能力和快速收敛性, 在许多优化问题中得到了很好的应用. 本文系统地阐述了状态转移算法的基本原理和内在特性, 详细介绍了状态转移算法的演变与提升, 包括离散、约束与多目标状态转移算法, 状态转移算法参数分析与优化、算子拓展与智能化策略等内容, 并从非线性系统辨识、工业过程控制、机器学习与数据挖掘等方面重点介绍了状态转移算法的应用.




2020, 46(11): 2275-2301.
doi: 10.16383/j.aas.c190531
摘要:
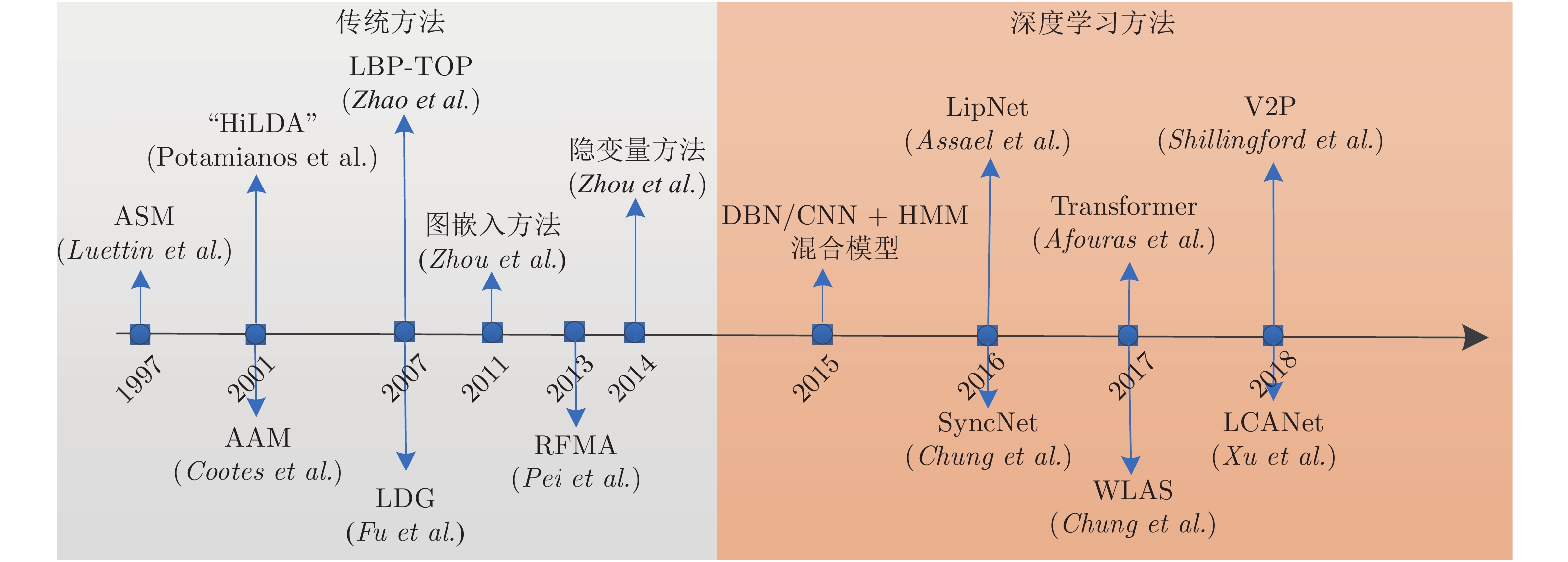
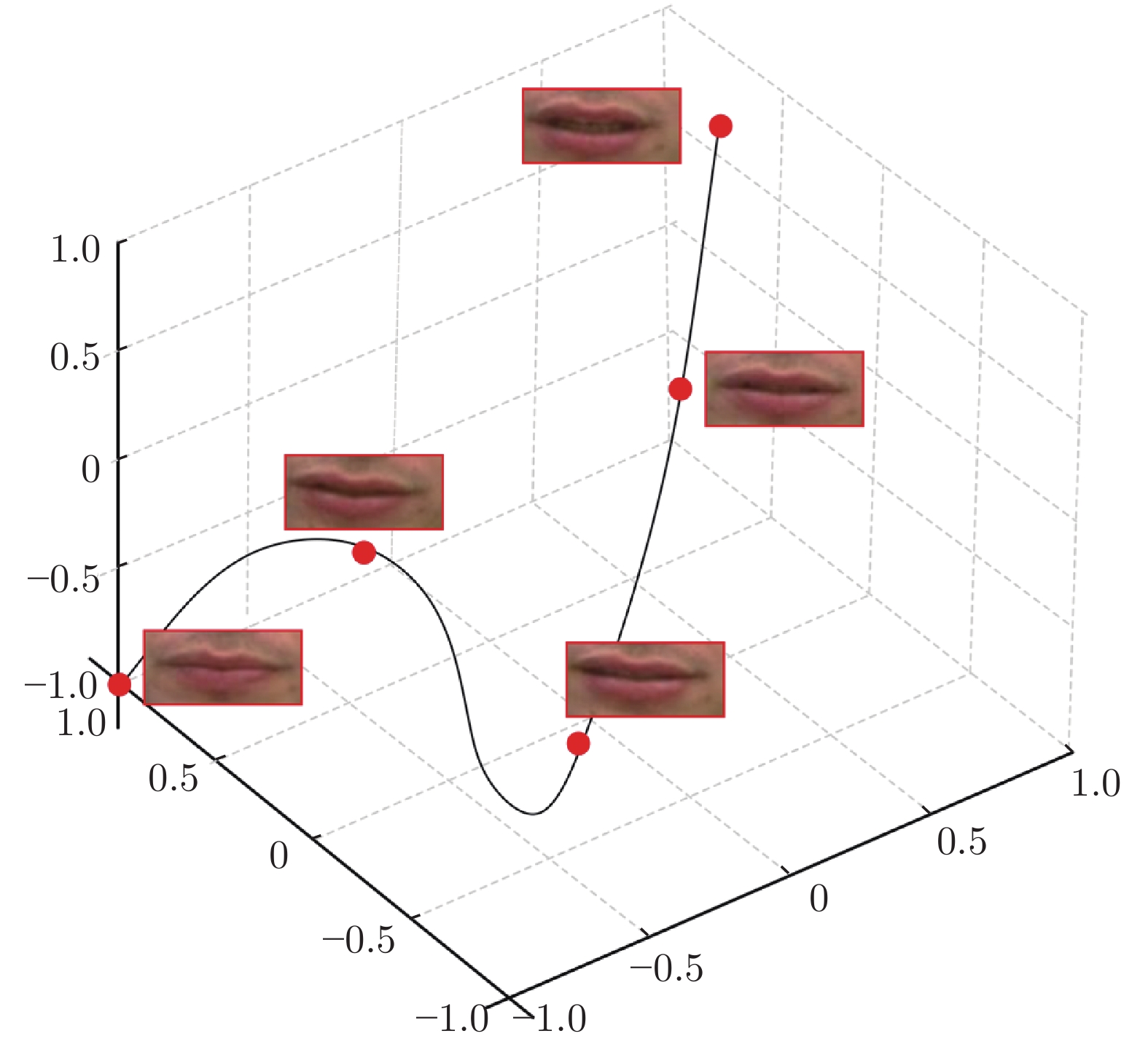
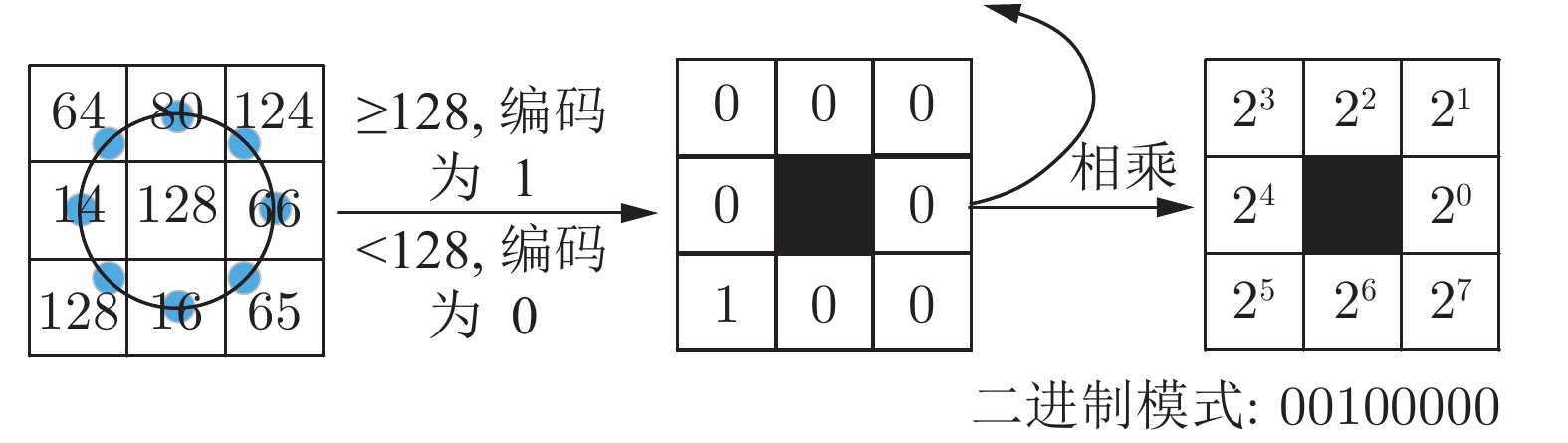
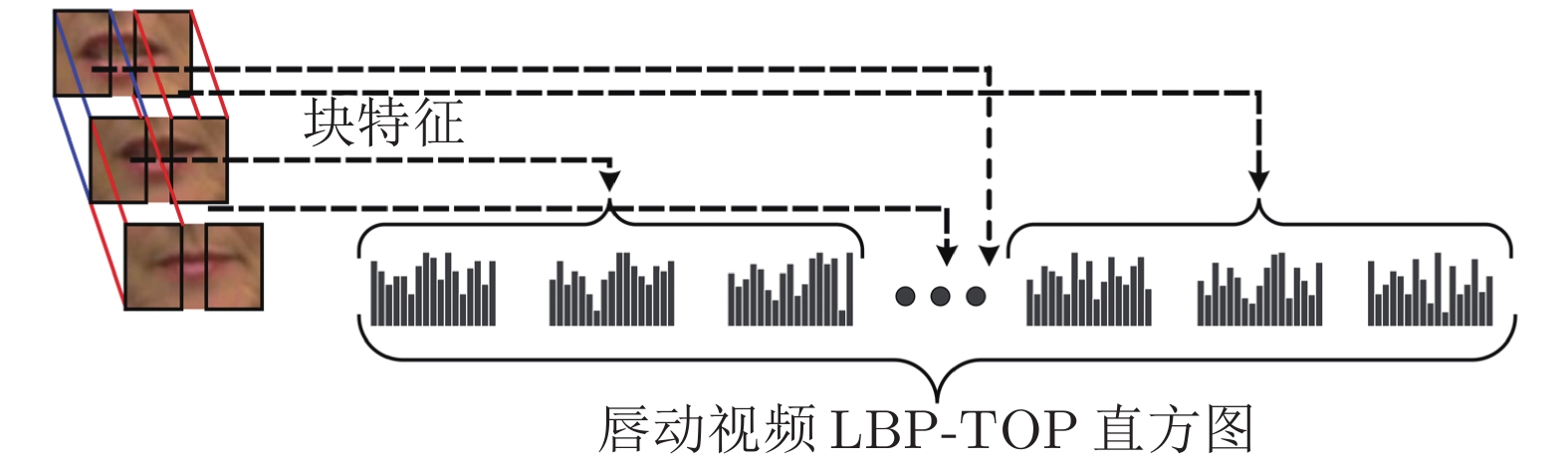
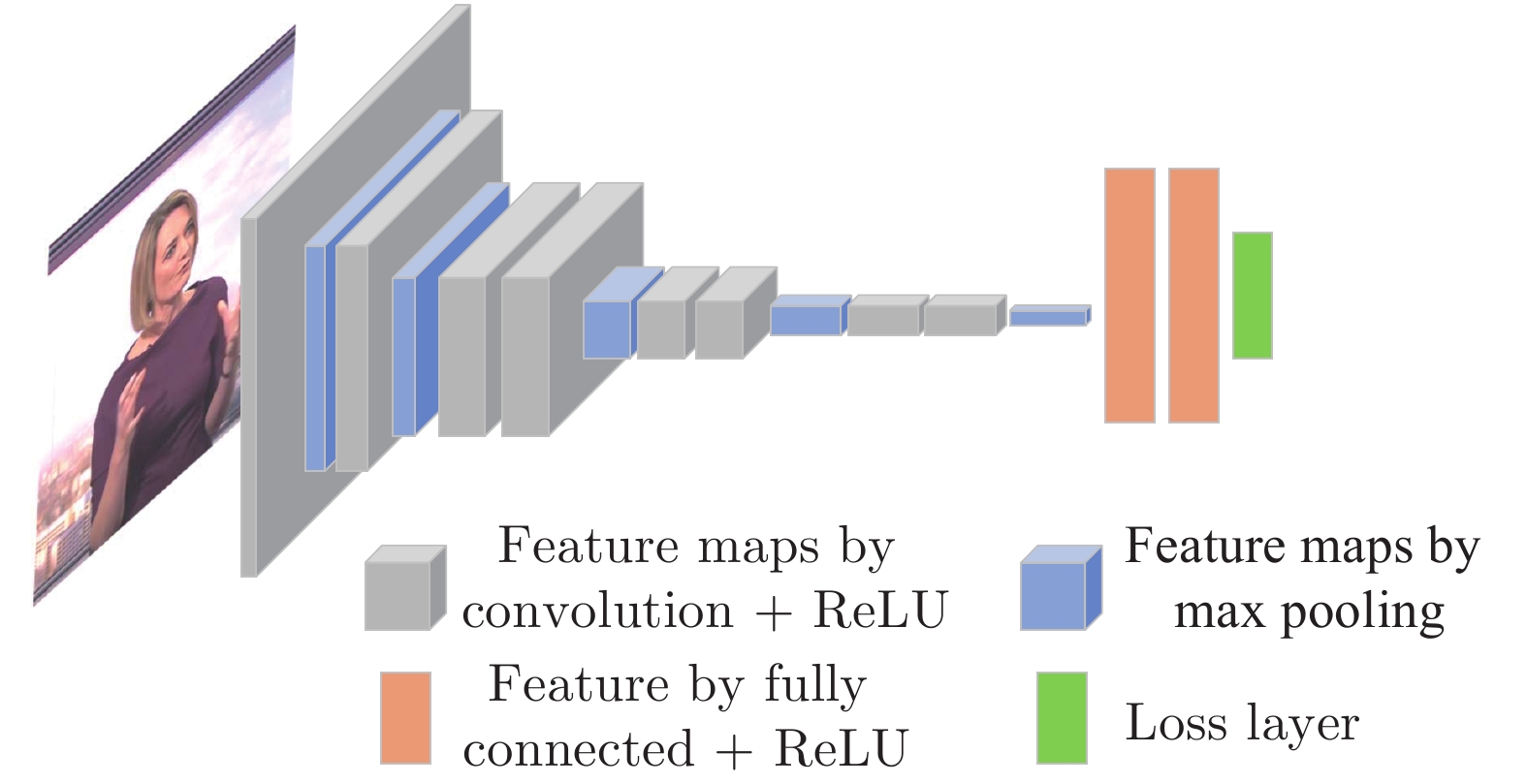
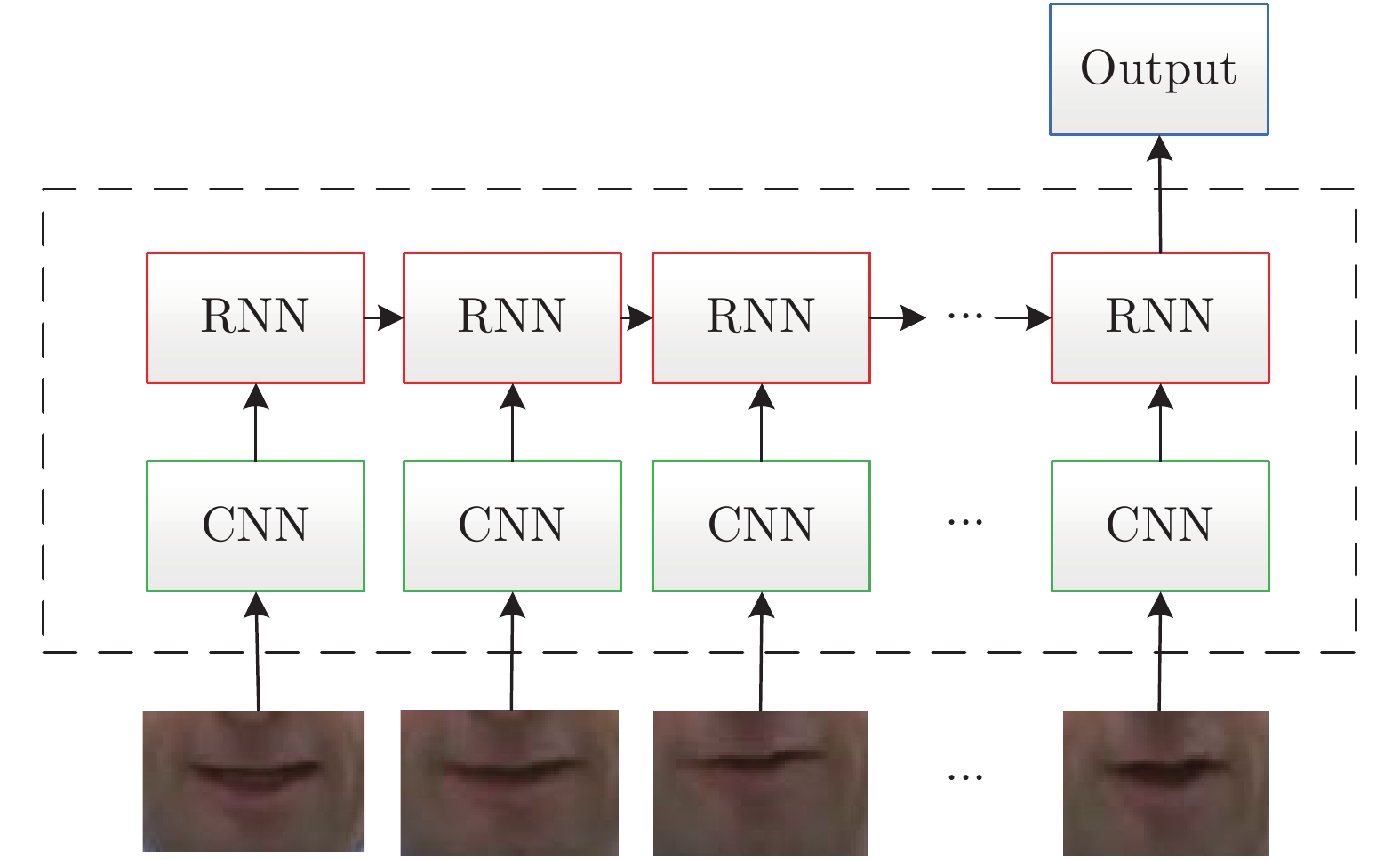
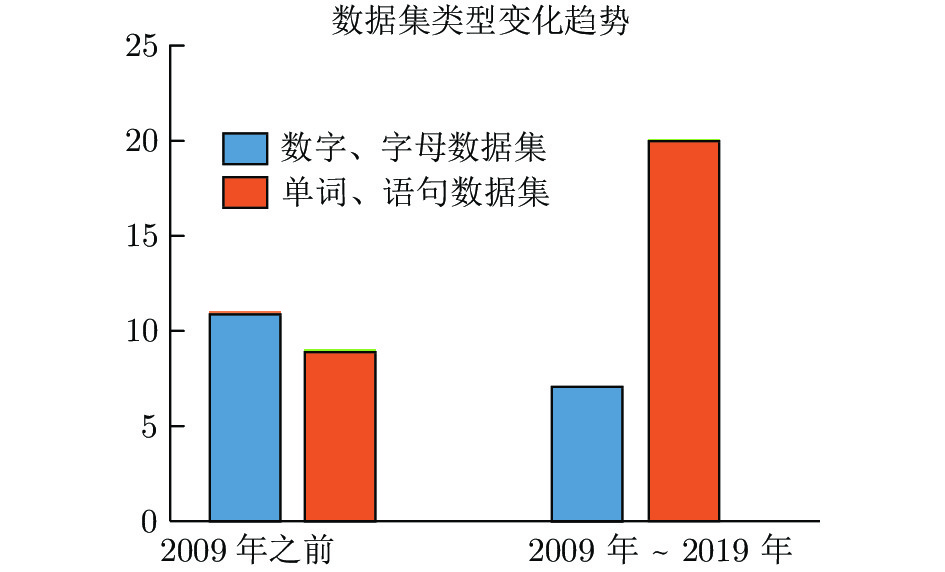
唇读, 也称视觉语言识别, 旨在通过说话者嘴唇运动的视觉信息, 解码出其所说文本内容. 唇读是计算机视觉和模式识别领域的一个重要问题, 在公共安防、医疗、国防军事和影视娱乐等领域有着广泛的应用价值. 近年来, 深度学习技术极大地推动了唇读研究进展. 本文首先阐述了唇读研究的内容和意义, 并深入剖析了唇读研究面临的难点与挑战; 然后介绍了目前唇读研究的现状与发展水平, 对近期主流唇读方法进行了梳理、归类和评述, 包括传统方法和近期的基于深度学习的方法; 最后, 探讨唇读研究潜在的问题和可能的研究方向. 以期引起大家对唇读问题的关注与兴趣, 并推动与此相关问题的研究进展.
唇读, 也称视觉语言识别, 旨在通过说话者嘴唇运动的视觉信息, 解码出其所说文本内容. 唇读是计算机视觉和模式识别领域的一个重要问题, 在公共安防、医疗、国防军事和影视娱乐等领域有着广泛的应用价值. 近年来, 深度学习技术极大地推动了唇读研究进展. 本文首先阐述了唇读研究的内容和意义, 并深入剖析了唇读研究面临的难点与挑战; 然后介绍了目前唇读研究的现状与发展水平, 对近期主流唇读方法进行了梳理、归类和评述, 包括传统方法和近期的基于深度学习的方法; 最后, 探讨唇读研究潜在的问题和可能的研究方向. 以期引起大家对唇读问题的关注与兴趣, 并推动与此相关问题的研究进展.










2020, 46(11): 2302-2318.
doi: 10.16383/j.aas.c190489
摘要:
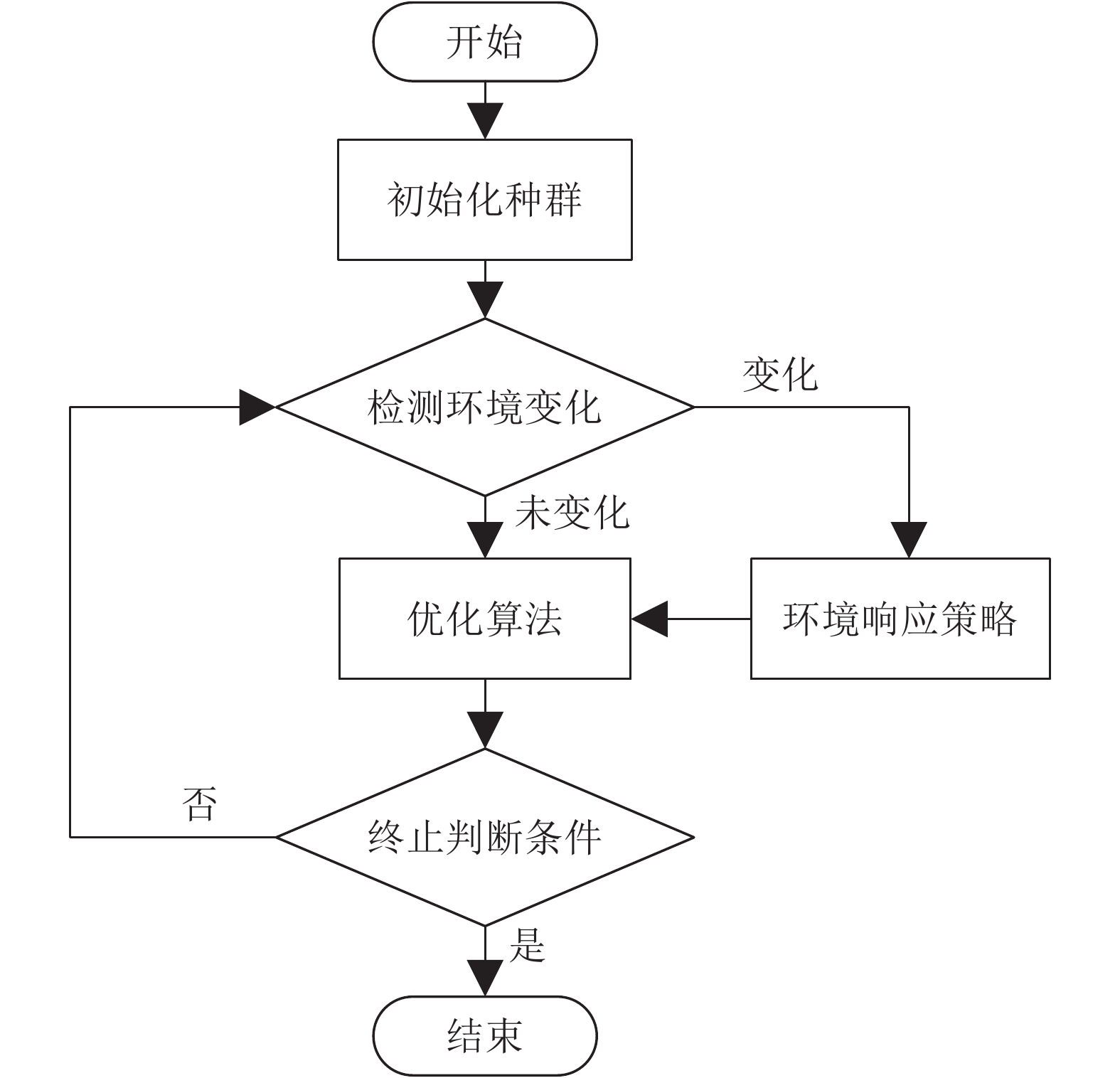
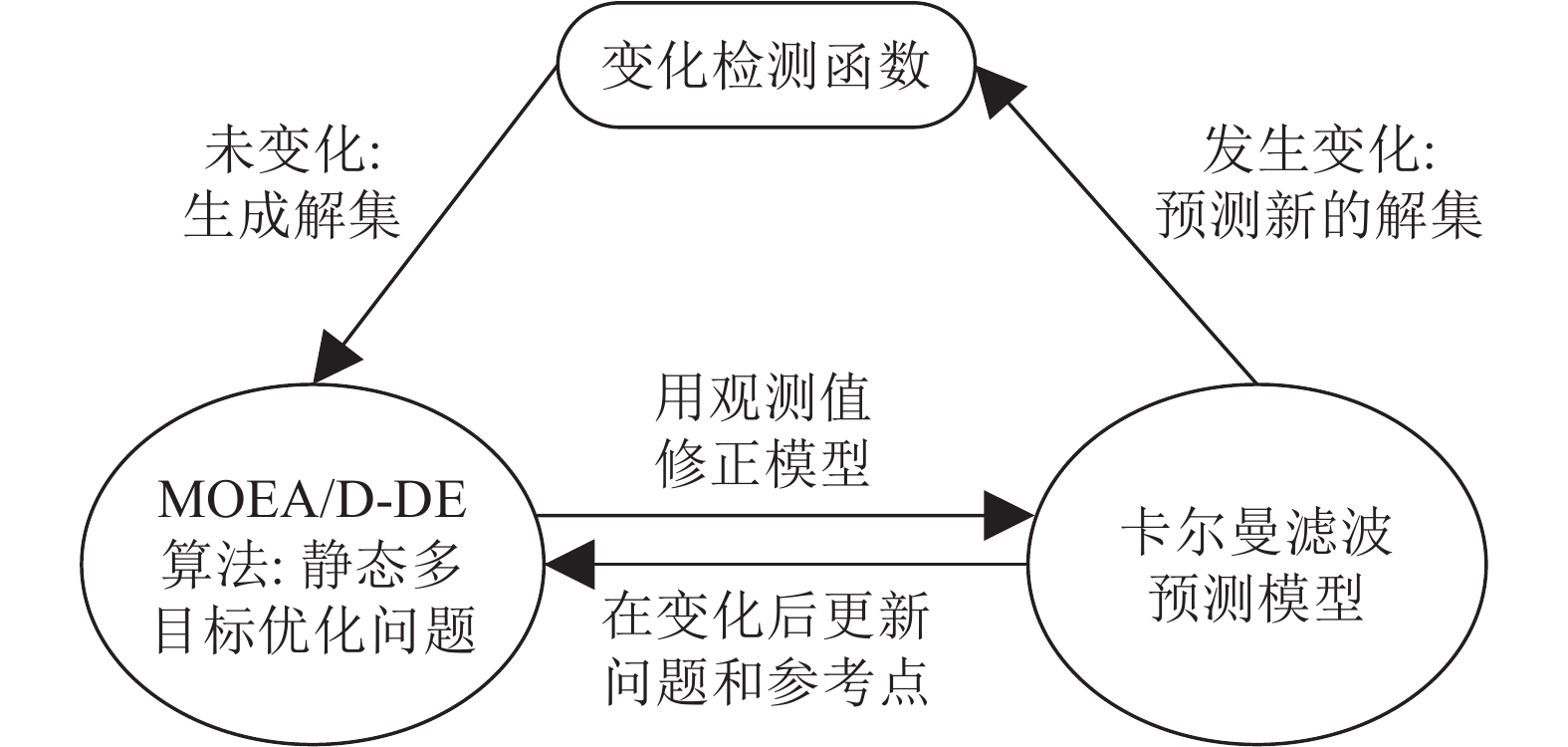
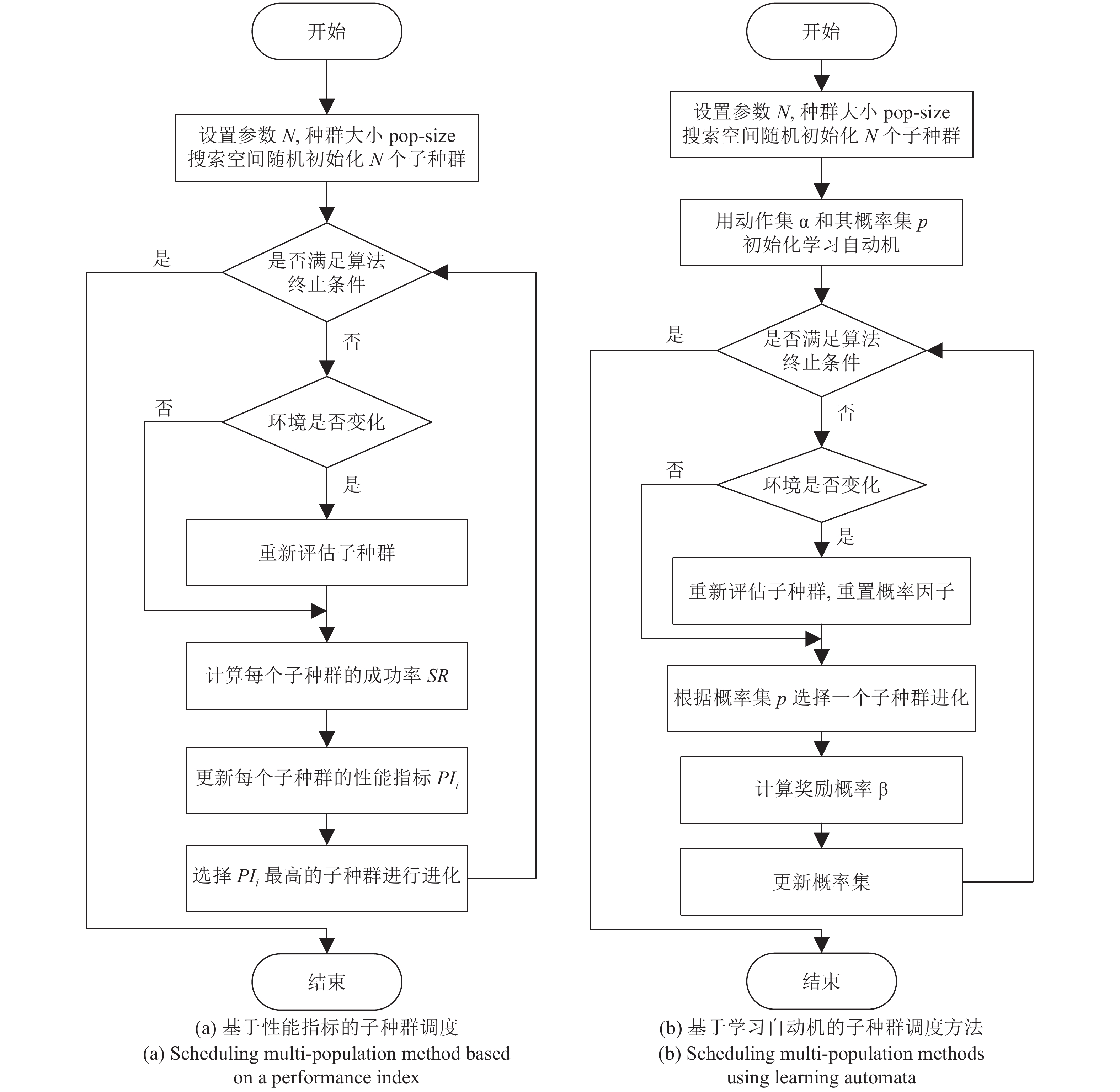
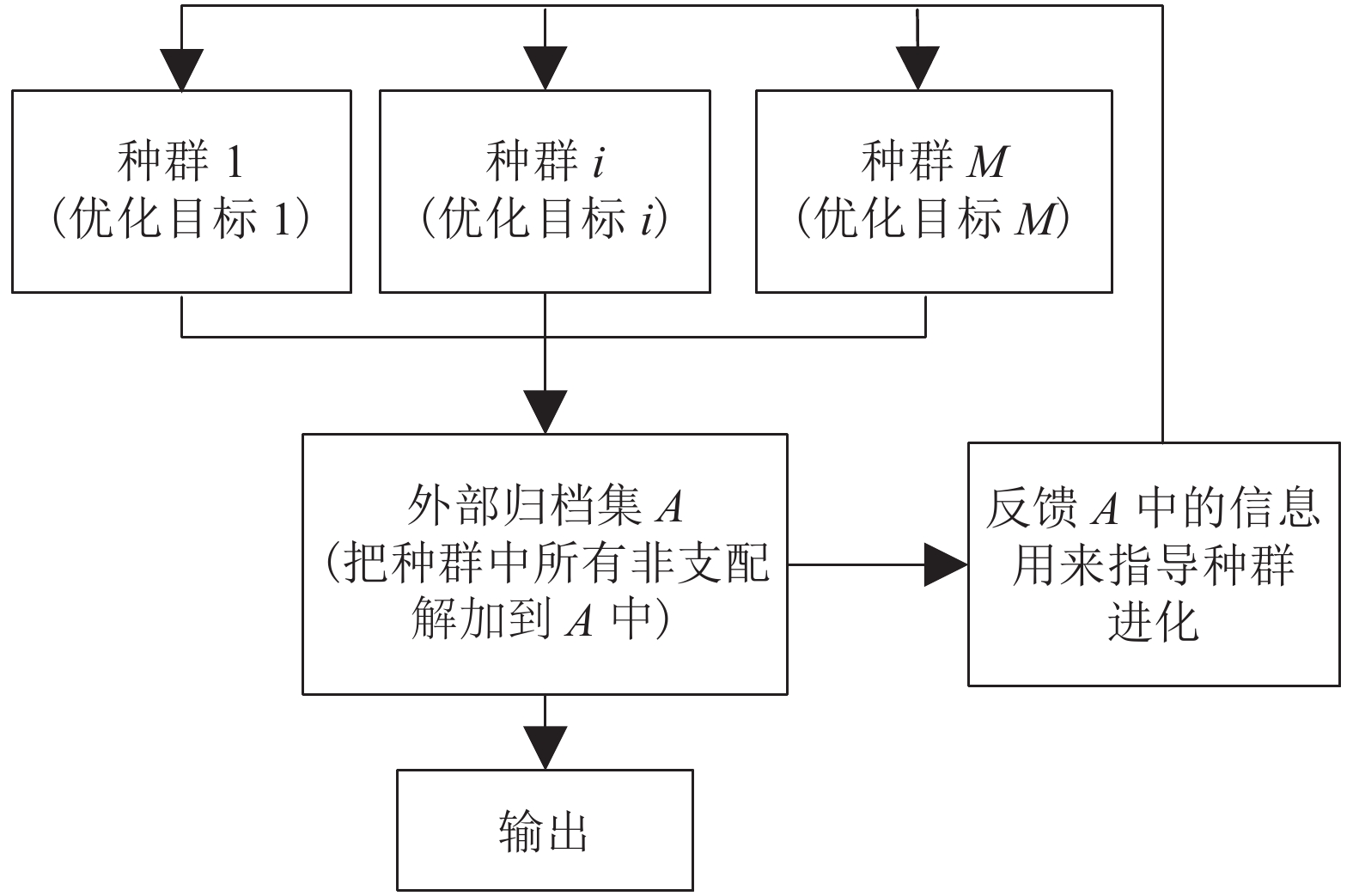
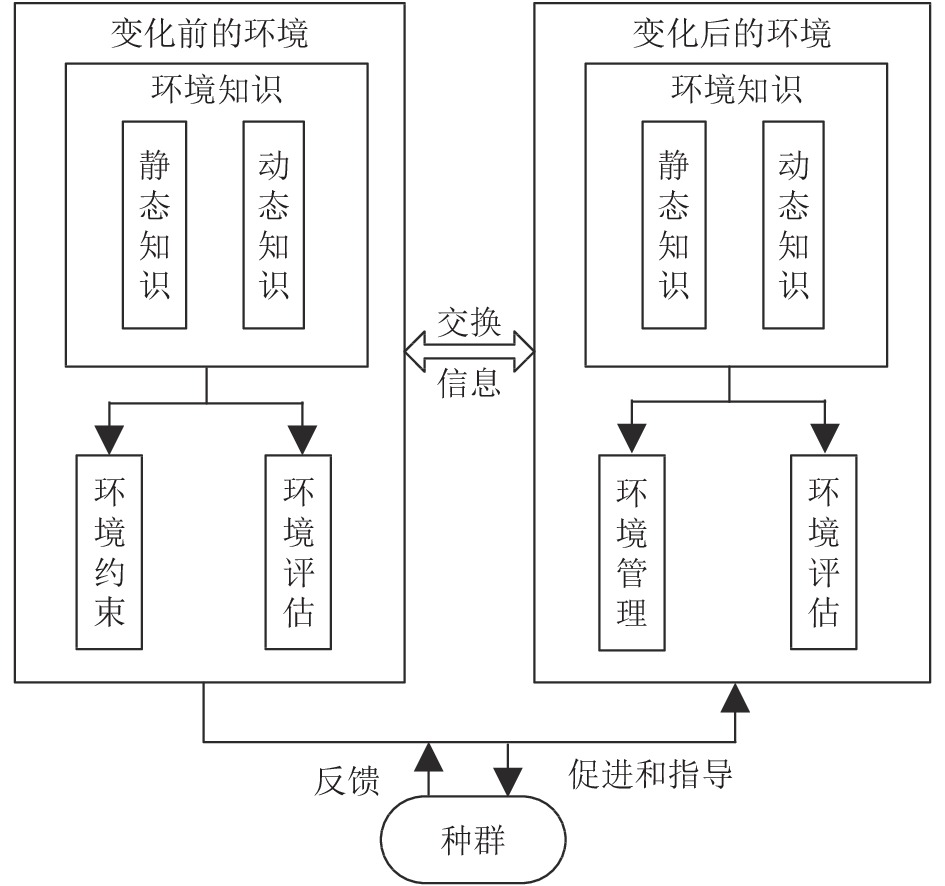
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs)已成为工程优化的研究热点, 其目标函数, 约束函数和相关参数都可能随时间不断变化, 如何利用搜索到的历史最优解对新的环境变化做出快速响应, 是设计动态多目标优化进化算法(Dynamic multi-objective optimization evolutionary algorithm, DMOEA)的重点和难点. 本文在介绍DMOEA的基础上, 分析了近年来基于个体和种群级别的环境响应策略, 多策略混合等的DMOEA主要研究进展, 并介绍了DMOEA的性能测试函数, 评价指标以及在工程优化领域中的应用, 分析了DMOEA研究中仍面临的主要问题, 展望了未来的研究方向.
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs)已成为工程优化的研究热点, 其目标函数, 约束函数和相关参数都可能随时间不断变化, 如何利用搜索到的历史最优解对新的环境变化做出快速响应, 是设计动态多目标优化进化算法(Dynamic multi-objective optimization evolutionary algorithm, DMOEA)的重点和难点. 本文在介绍DMOEA的基础上, 分析了近年来基于个体和种群级别的环境响应策略, 多策略混合等的DMOEA主要研究进展, 并介绍了DMOEA的性能测试函数, 评价指标以及在工程优化领域中的应用, 分析了DMOEA研究中仍面临的主要问题, 展望了未来的研究方向.

2020, 46(11): 2319-2336.
doi: 10.16383/j.aas.c180538
摘要:
为满足智能制造企业对产品质量检测的需求, 服务制造企业生产管理, 对缺陷检测技术的研究现状、典型方法和应用进行梳理.首先总结了磁粉检测法、渗透检测法、涡流检测法、超声波检测法、机器视觉和基于深度学习的缺陷检测技术的优缺点; 对比分析了磁粉检测法、渗透检测法、涡流检测法、超声波检测法、机器视觉检测的主流缺陷检测技术和基于深度学习的缺陷检测技术的研究现状; 然后, 梳理了缺陷检测技术在电子元器件、管道、焊接件、机械零件和质量控制中的典型应用; 最后, 对缺陷检测技术的研究情况进行了总结和展望, 指出该研究领域亟需解决的问题和未来发展的方向, 并从高精度、高定位、快速检测、小目标、复杂背景、被遮挡物体检测、物体关联关系等几个方面总结近年来发表在ICCV (International Conference on Computer Vision)和CVPR (International Conference on Computer Vision and Pattern Recognition)等知名国际会议上相关论文的核心思想和源代码, 为缺陷检测技术的进一步发展提供理论和应用上的借鉴与参考.
为满足智能制造企业对产品质量检测的需求, 服务制造企业生产管理, 对缺陷检测技术的研究现状、典型方法和应用进行梳理.首先总结了磁粉检测法、渗透检测法、涡流检测法、超声波检测法、机器视觉和基于深度学习的缺陷检测技术的优缺点; 对比分析了磁粉检测法、渗透检测法、涡流检测法、超声波检测法、机器视觉检测的主流缺陷检测技术和基于深度学习的缺陷检测技术的研究现状; 然后, 梳理了缺陷检测技术在电子元器件、管道、焊接件、机械零件和质量控制中的典型应用; 最后, 对缺陷检测技术的研究情况进行了总结和展望, 指出该研究领域亟需解决的问题和未来发展的方向, 并从高精度、高定位、快速检测、小目标、复杂背景、被遮挡物体检测、物体关联关系等几个方面总结近年来发表在ICCV (International Conference on Computer Vision)和CVPR (International Conference on Computer Vision and Pattern Recognition)等知名国际会议上相关论文的核心思想和源代码, 为缺陷检测技术的进一步发展提供理论和应用上的借鉴与参考.
2020, 46(11): 2337-2349.
doi: 10.16383/j.aas.c190515
摘要:
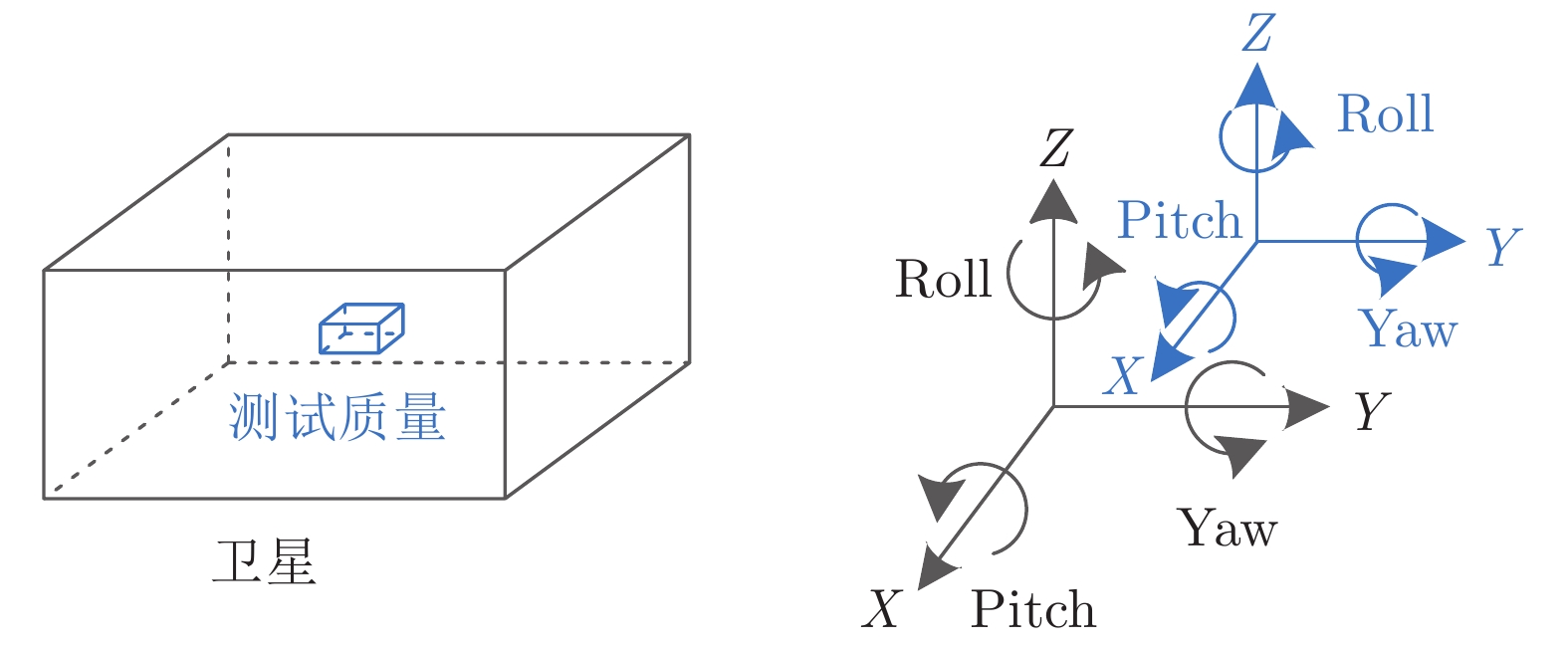
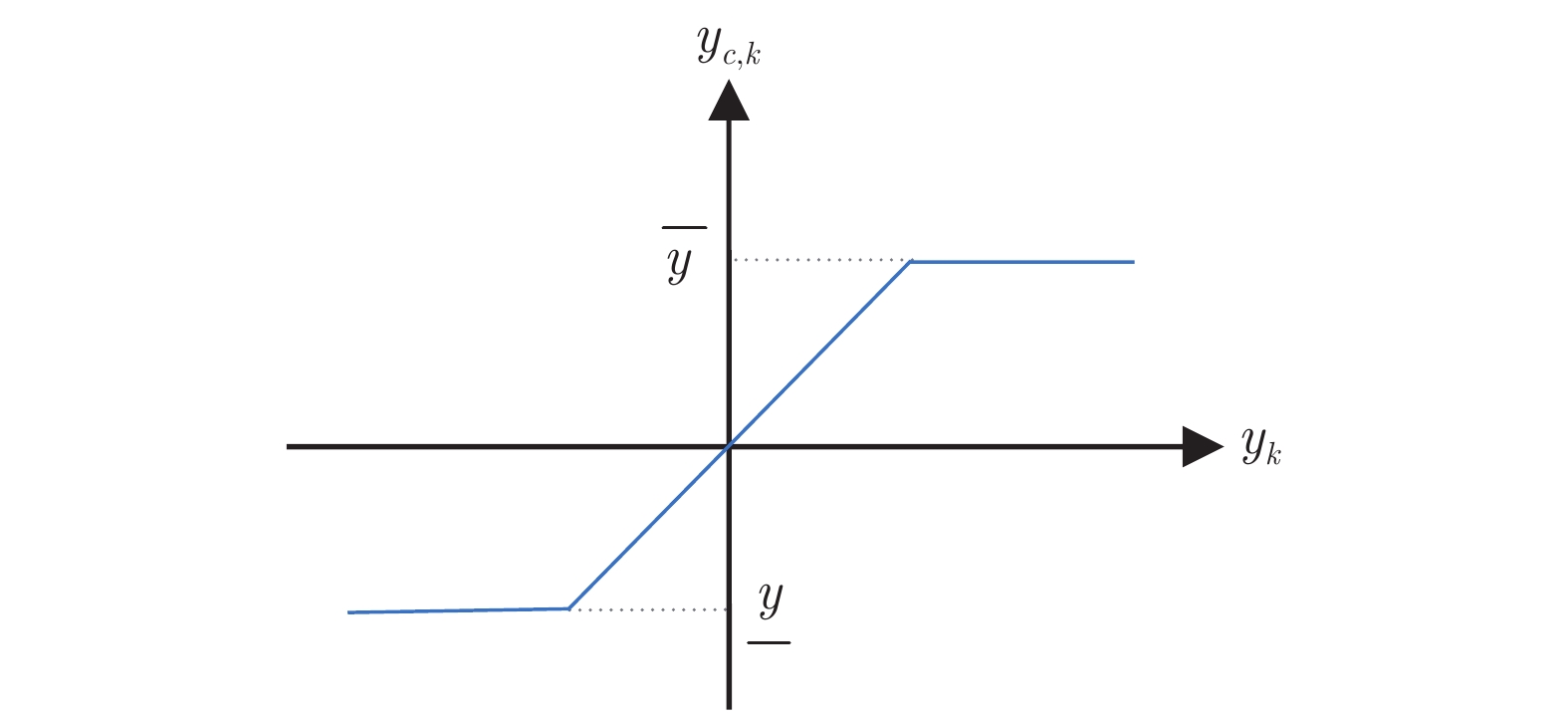
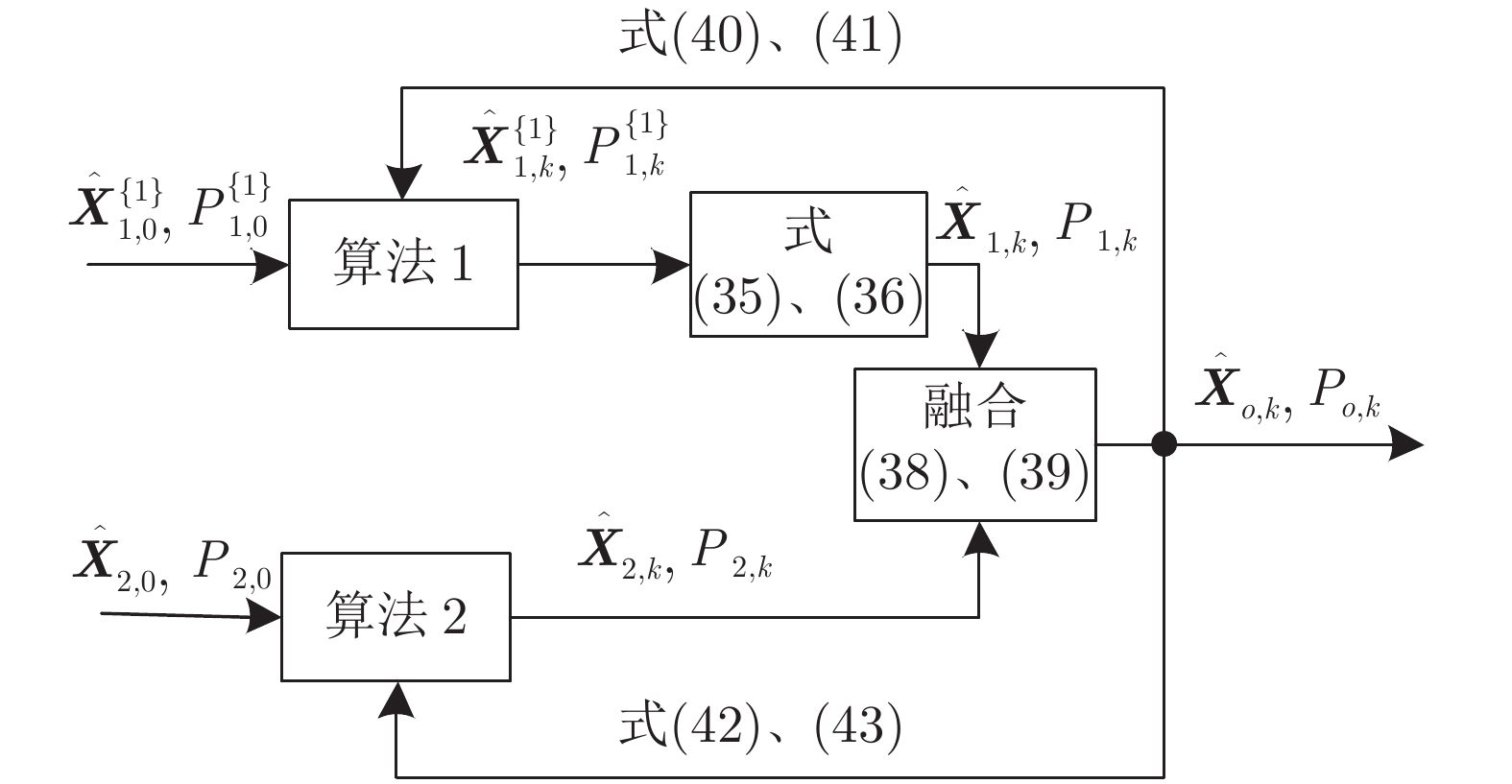
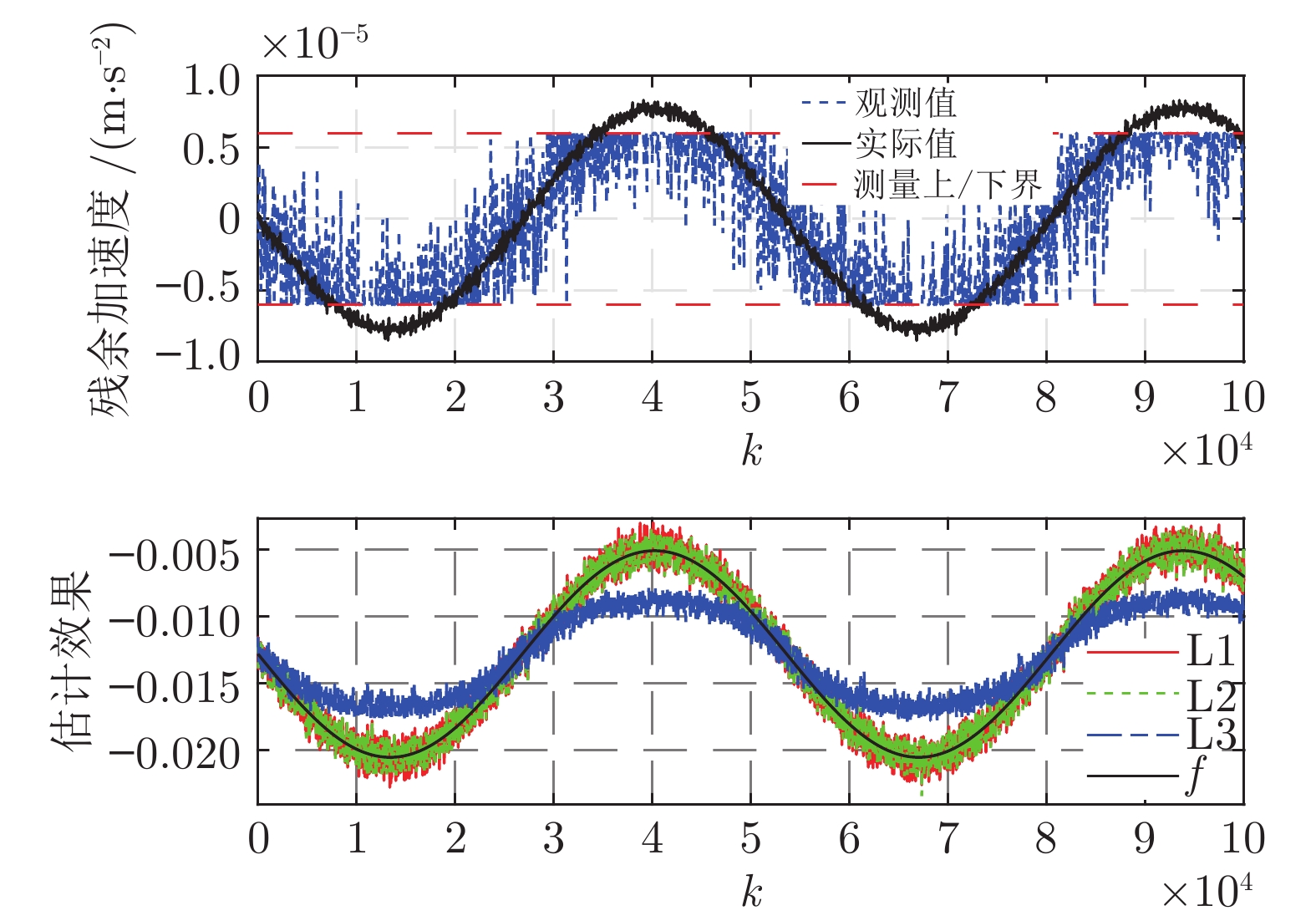
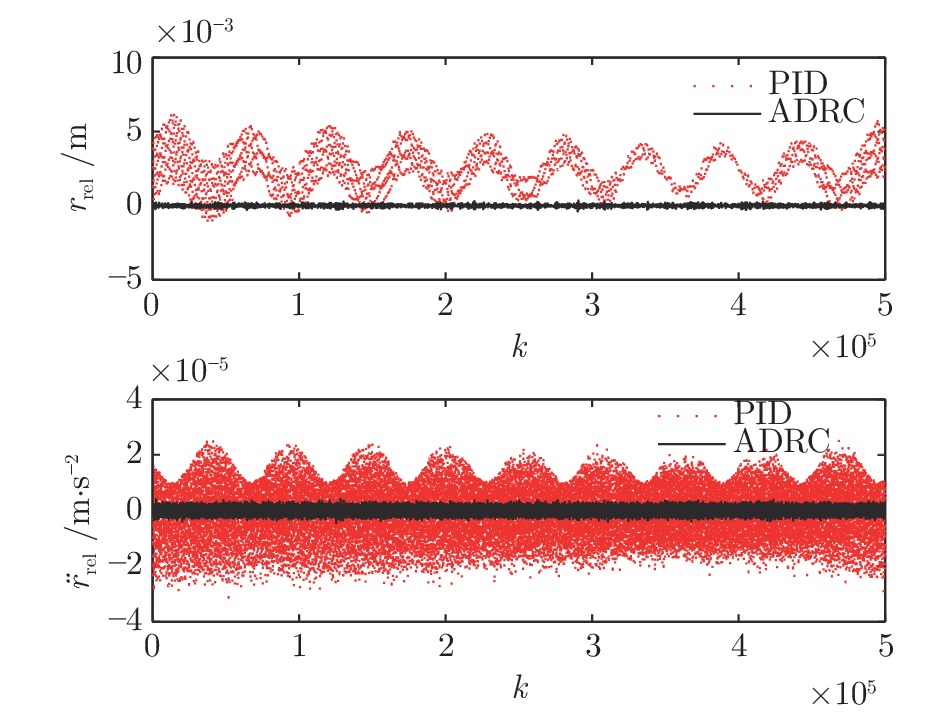
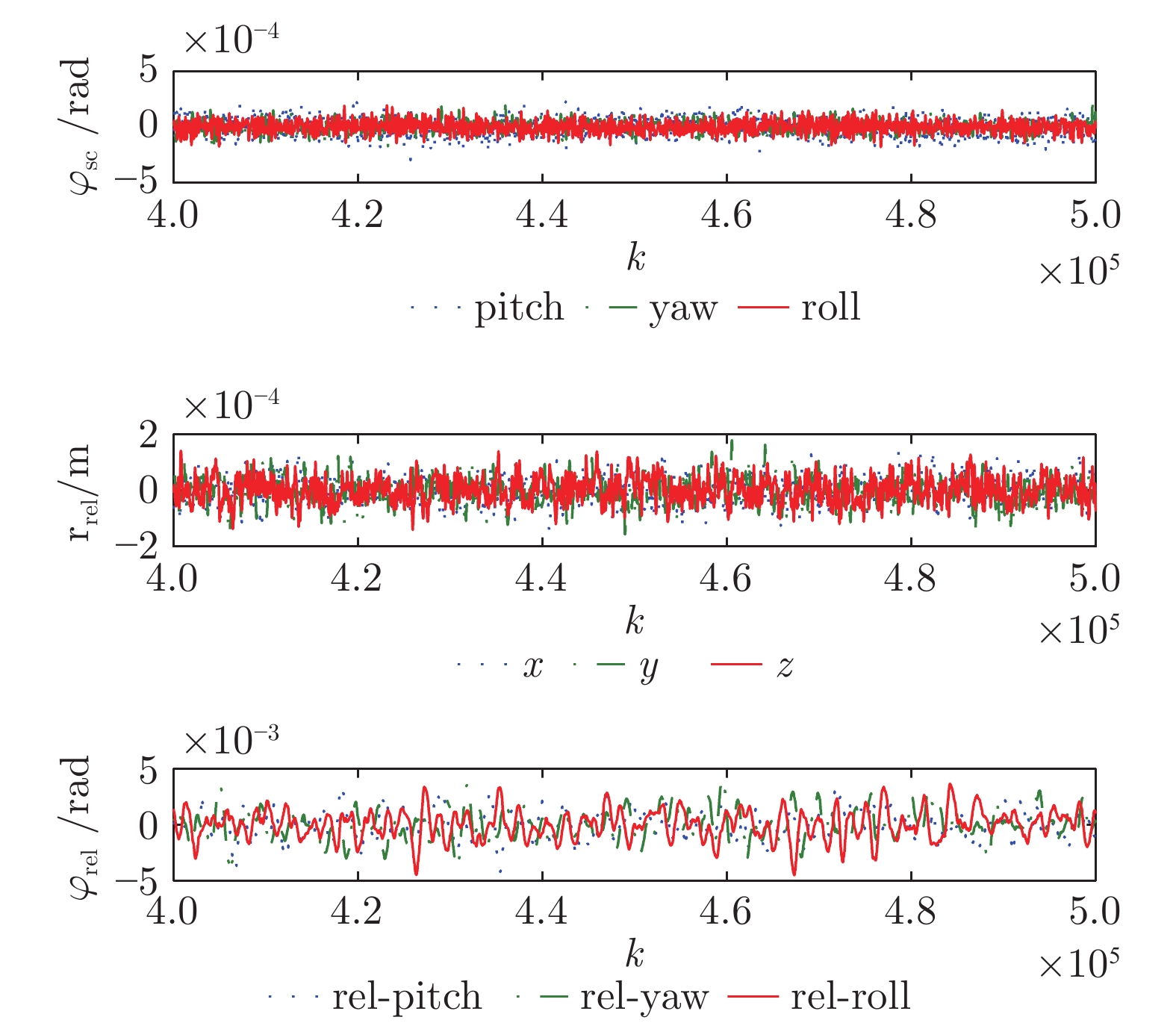
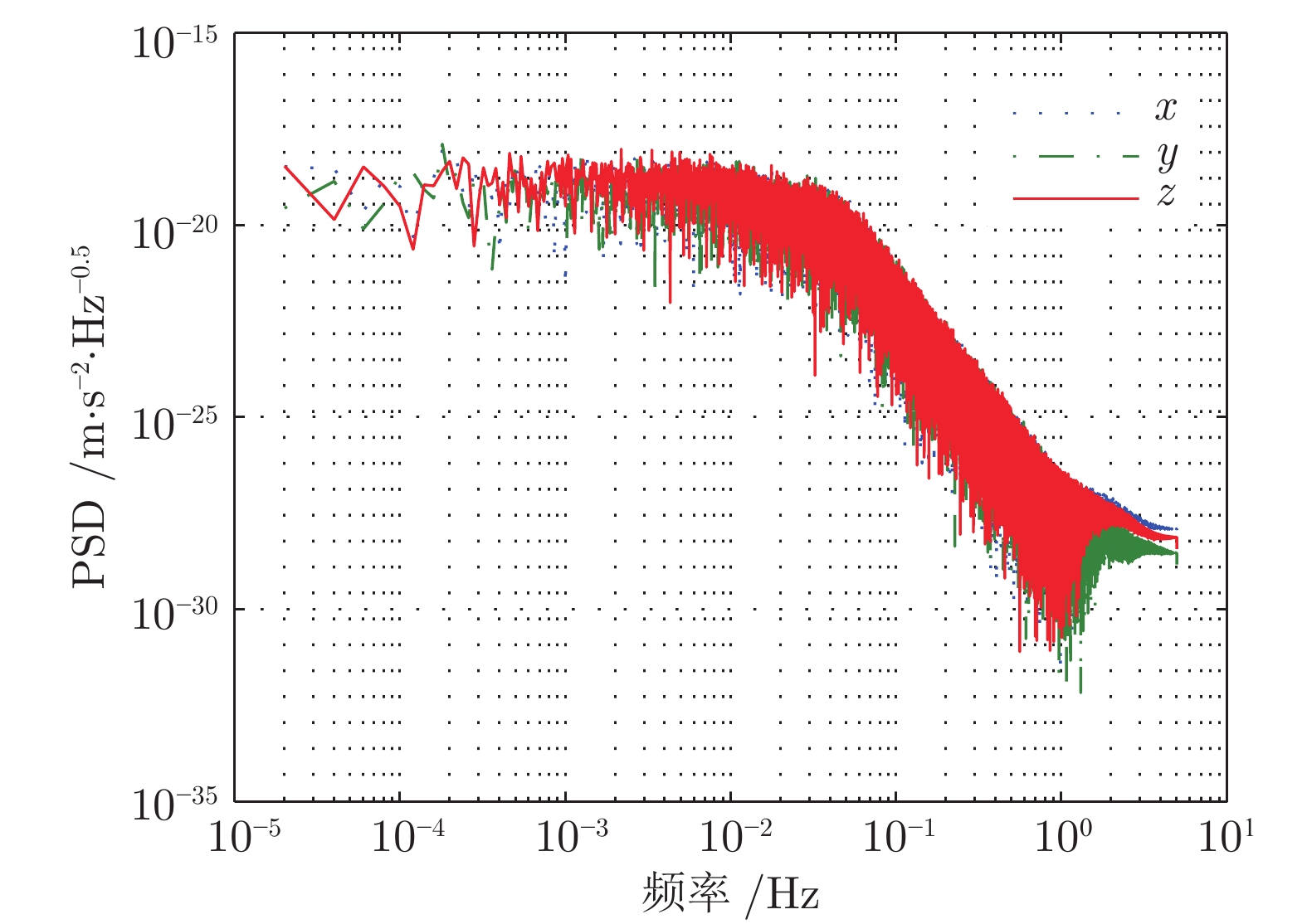
无拖曳卫星的本体姿态、卫星本体与测试质量间的相对位移及相对姿态的联合控制受到外部扰动、输入噪声、测量噪声及饱和约束、输入耦合以及状态耦合等因素的影响, 控制器的设计面临挑战. 本文采用基于扩张状态的卡尔曼滤波对系统状态和系统扰动进行实时估计, 引入自抗扰控制策略进行了控制器设计. 针对无拖曳控制子系统设计了测量饱和受限下的扩张状态估计算法, 并进行了信息融合. 在设计控制律时不仅考虑了对外部扰动的补偿, 还将系统状态间的耦合关系看成内部扰动进行补偿, 使得被控系统等价为“积分串联型系统”, 在此基础上实现了无拖曳卫星的联合控制. 数值仿真验证了方法的有效性和合理性.
无拖曳卫星的本体姿态、卫星本体与测试质量间的相对位移及相对姿态的联合控制受到外部扰动、输入噪声、测量噪声及饱和约束、输入耦合以及状态耦合等因素的影响, 控制器的设计面临挑战. 本文采用基于扩张状态的卡尔曼滤波对系统状态和系统扰动进行实时估计, 引入自抗扰控制策略进行了控制器设计. 针对无拖曳控制子系统设计了测量饱和受限下的扩张状态估计算法, 并进行了信息融合. 在设计控制律时不仅考虑了对外部扰动的补偿, 还将系统状态间的耦合关系看成内部扰动进行补偿, 使得被控系统等价为“积分串联型系统”, 在此基础上实现了无拖曳卫星的联合控制. 数值仿真验证了方法的有效性和合理性.





2020, 46(11): 2350-2358.
doi: 10.16383/j.aas.c200100
摘要:
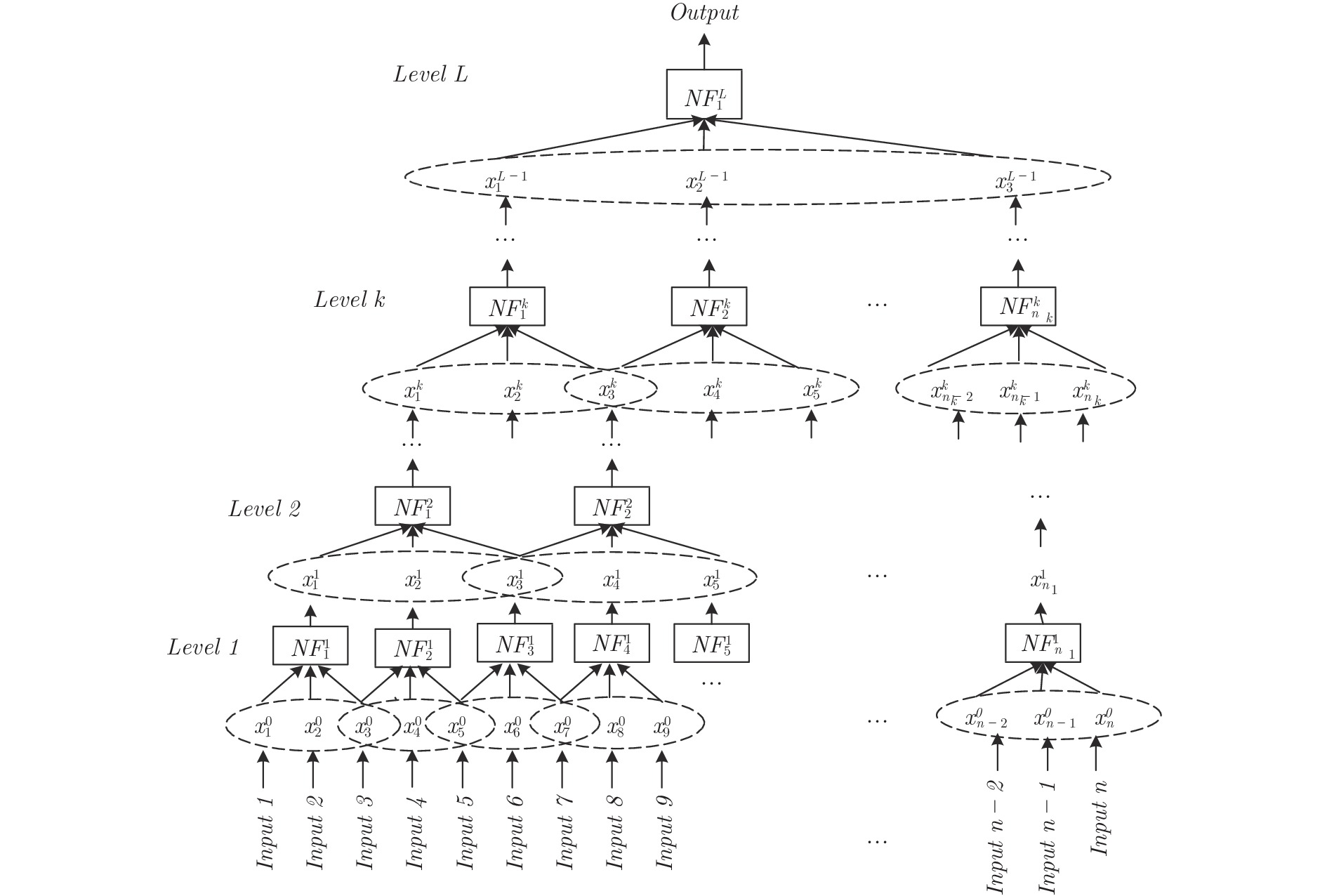
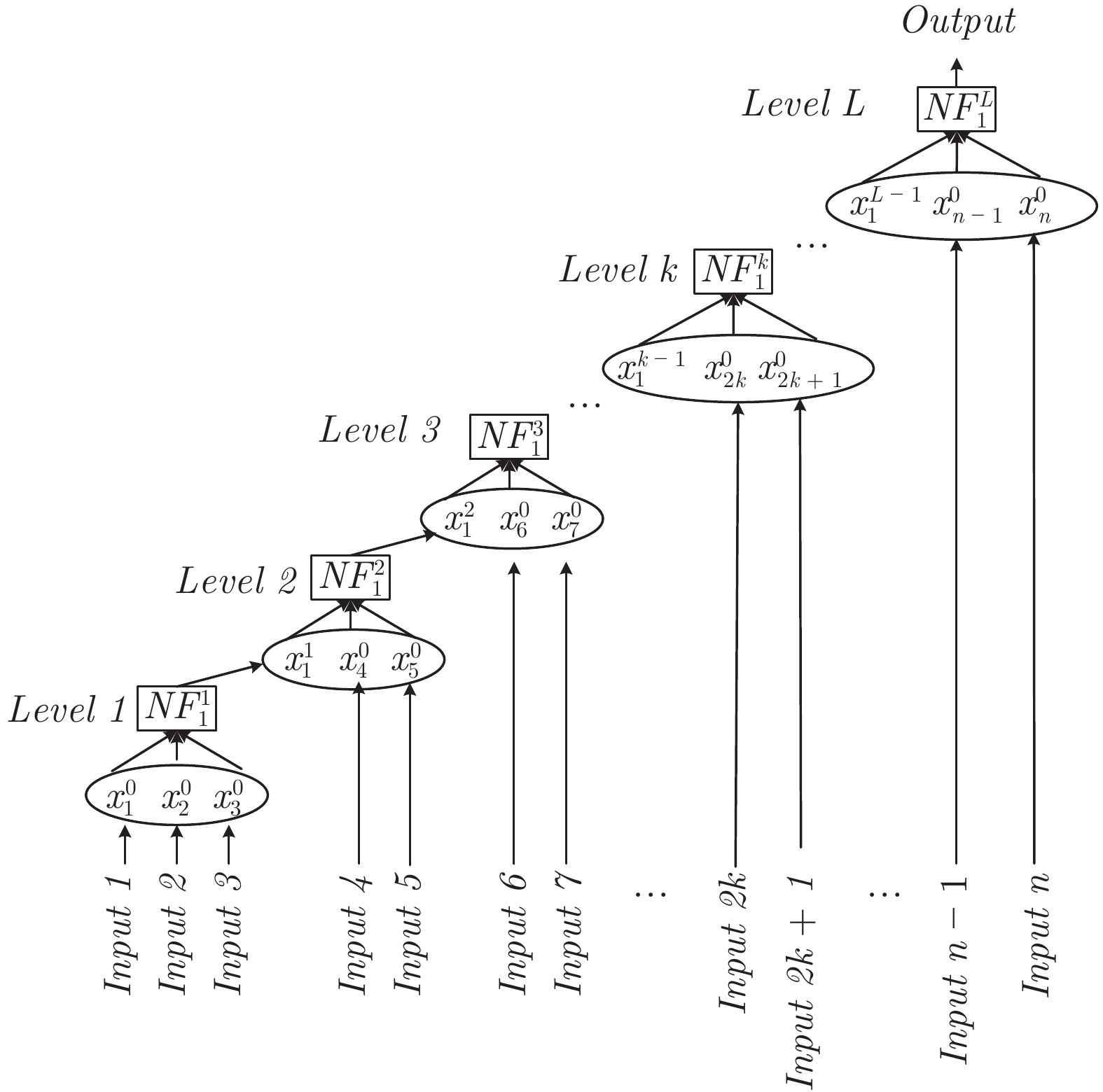
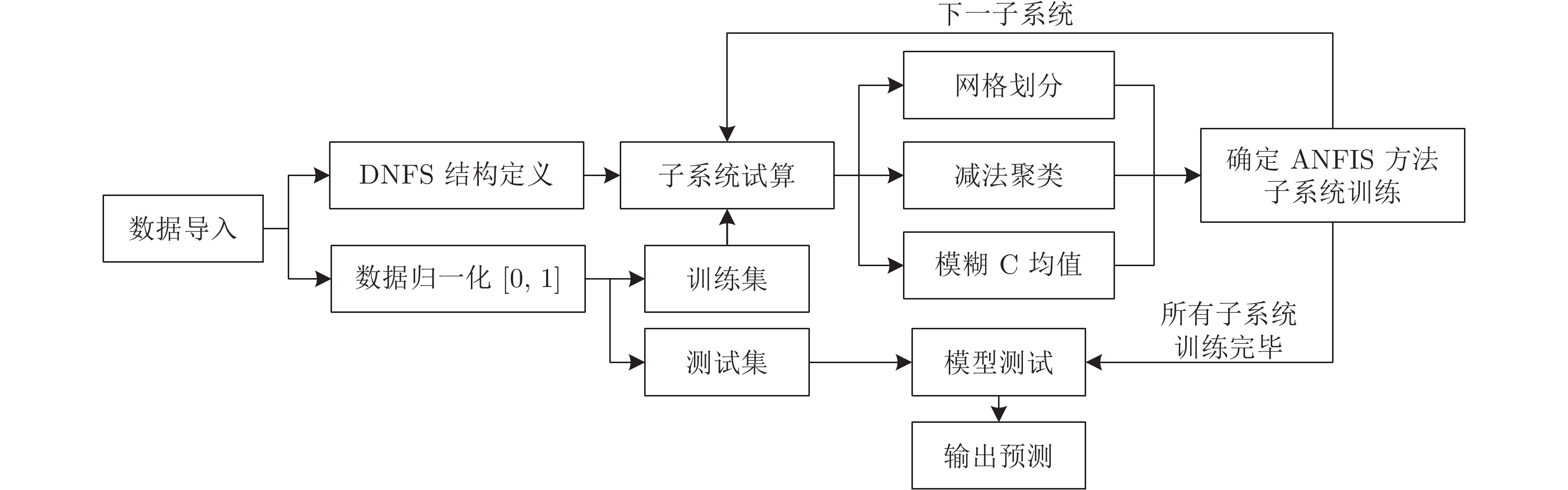
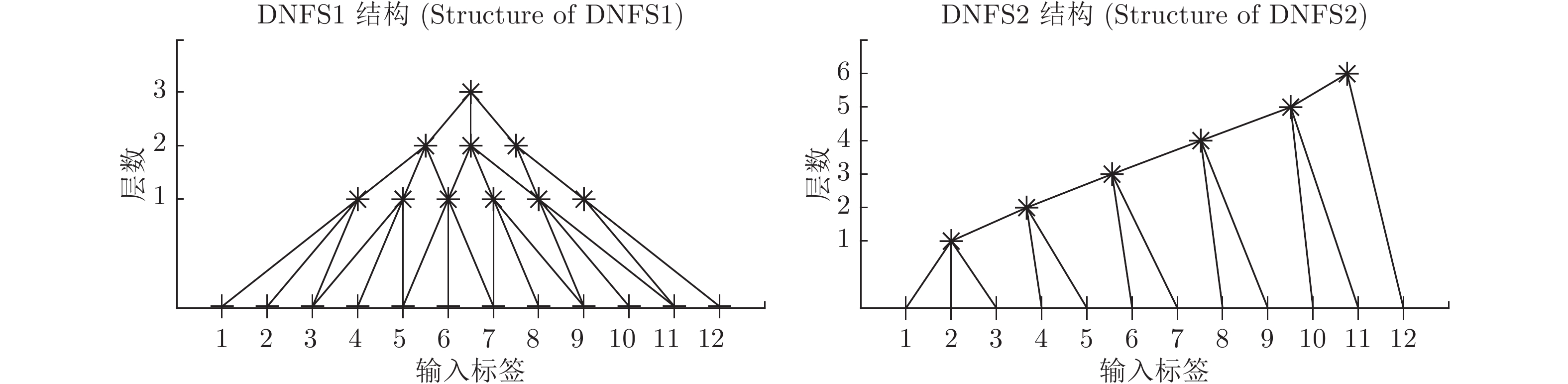
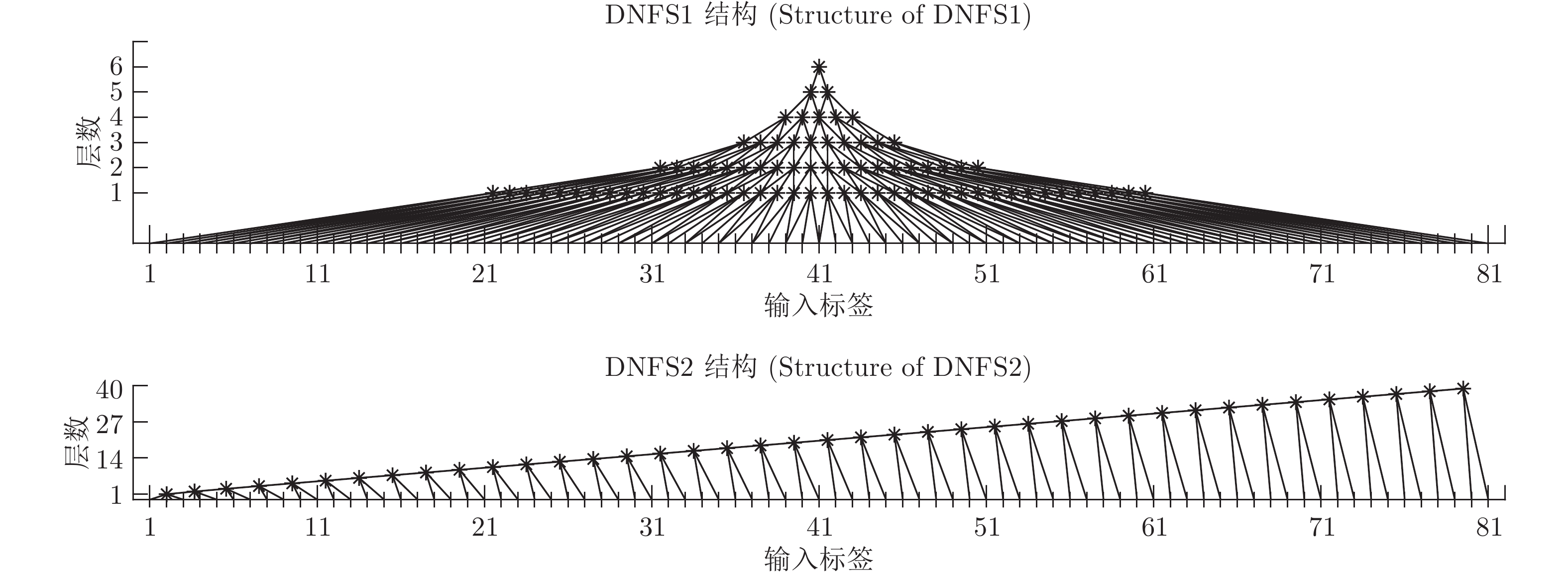
深度神经网络是人工智能的热点, 可以很好处理高维大数据, 却有可解释性差的不足. 通过IF-THEN规则构建的模糊系统, 具有可解释性强的优点, 但在处理高维大数据时会遇到“维数灾难”问题. 本文提出一种基于ANFIS (Adaptive network based fuzzy inference system)的深度神经模糊系统(Deep neural fuzzy system, DNFS)及两种基于分块和分层的启发式实现算法: DNFS1和DNFS2. 通过四个面向回归应用的数据集的测试, 我们发现: 1)采用分块、分层学习的DNFS在准确度与可解释性上优于BP、RBF、GRNN等传统浅层神经网络算法, 也优于LSTM和DBN等深度神经网络算法; 2)在低维问题中, DNFS1具有一定优势; 3)在面对高维问题时, DNFS2表现更为突出. 本文的研究结果表明DNFS是一种新型深度学习方法, 不仅可解释性好, 而且能有效解决处理高维数据时模糊规则数目爆炸的问题, 具有很好的发展前景.
深度神经网络是人工智能的热点, 可以很好处理高维大数据, 却有可解释性差的不足. 通过IF-THEN规则构建的模糊系统, 具有可解释性强的优点, 但在处理高维大数据时会遇到“维数灾难”问题. 本文提出一种基于ANFIS (Adaptive network based fuzzy inference system)的深度神经模糊系统(Deep neural fuzzy system, DNFS)及两种基于分块和分层的启发式实现算法: DNFS1和DNFS2. 通过四个面向回归应用的数据集的测试, 我们发现: 1)采用分块、分层学习的DNFS在准确度与可解释性上优于BP、RBF、GRNN等传统浅层神经网络算法, 也优于LSTM和DBN等深度神经网络算法; 2)在低维问题中, DNFS1具有一定优势; 3)在面对高维问题时, DNFS2表现更为突出. 本文的研究结果表明DNFS是一种新型深度学习方法, 不仅可解释性好, 而且能有效解决处理高维数据时模糊规则数目爆炸的问题, 具有很好的发展前景.





2020, 46(11): 2359-2366.
doi: 10.16383/j.aas.c190674
摘要:
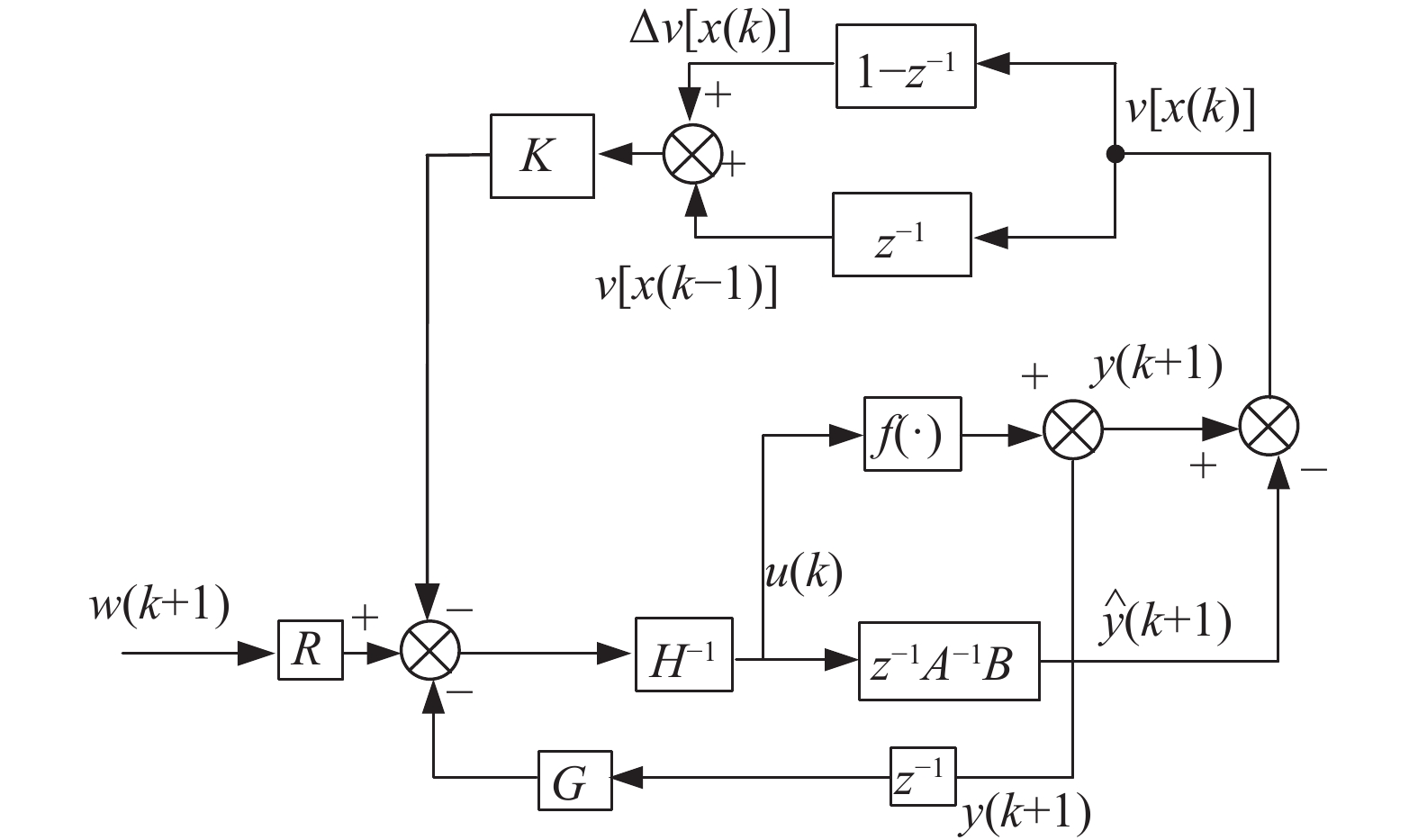
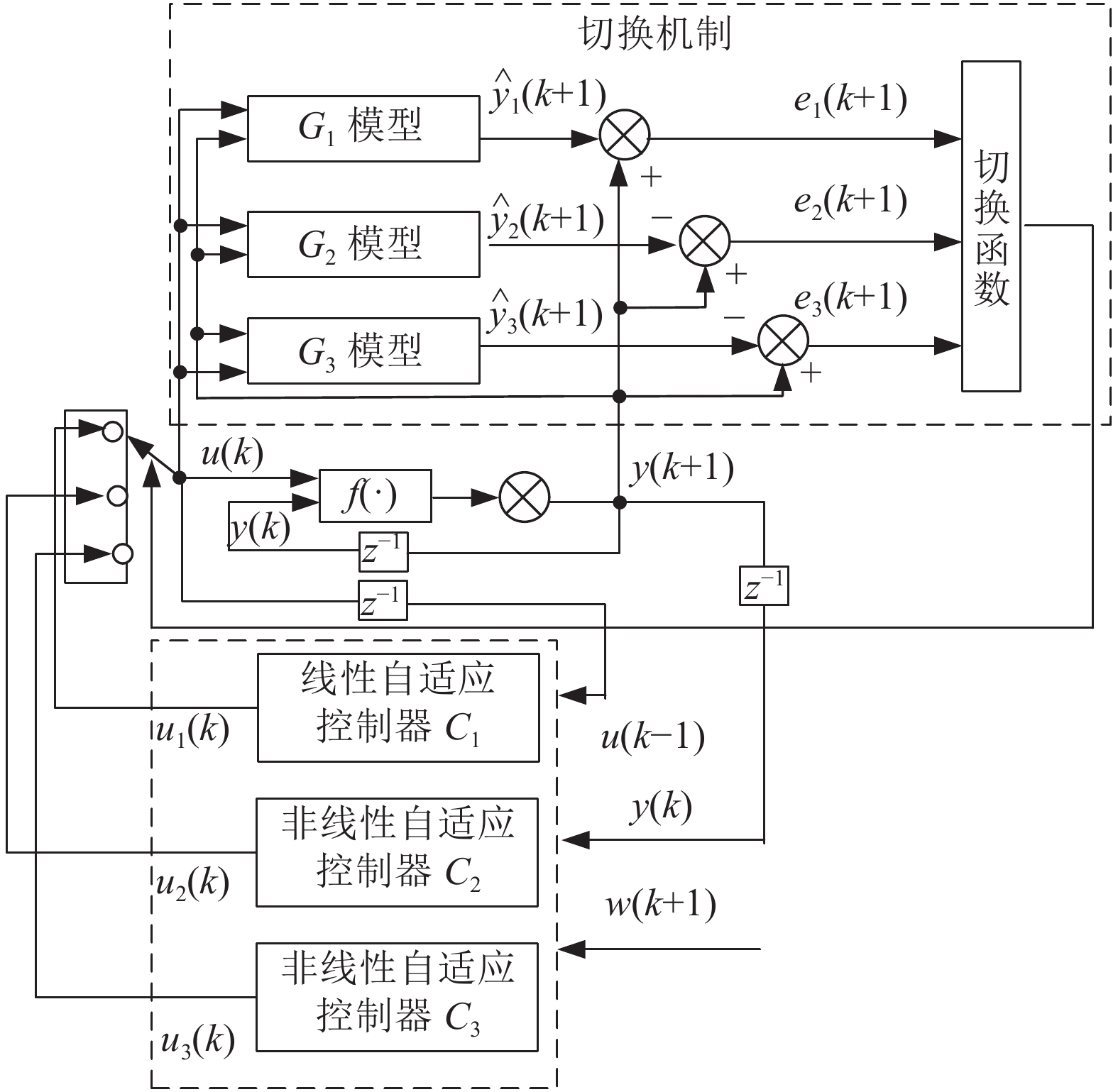
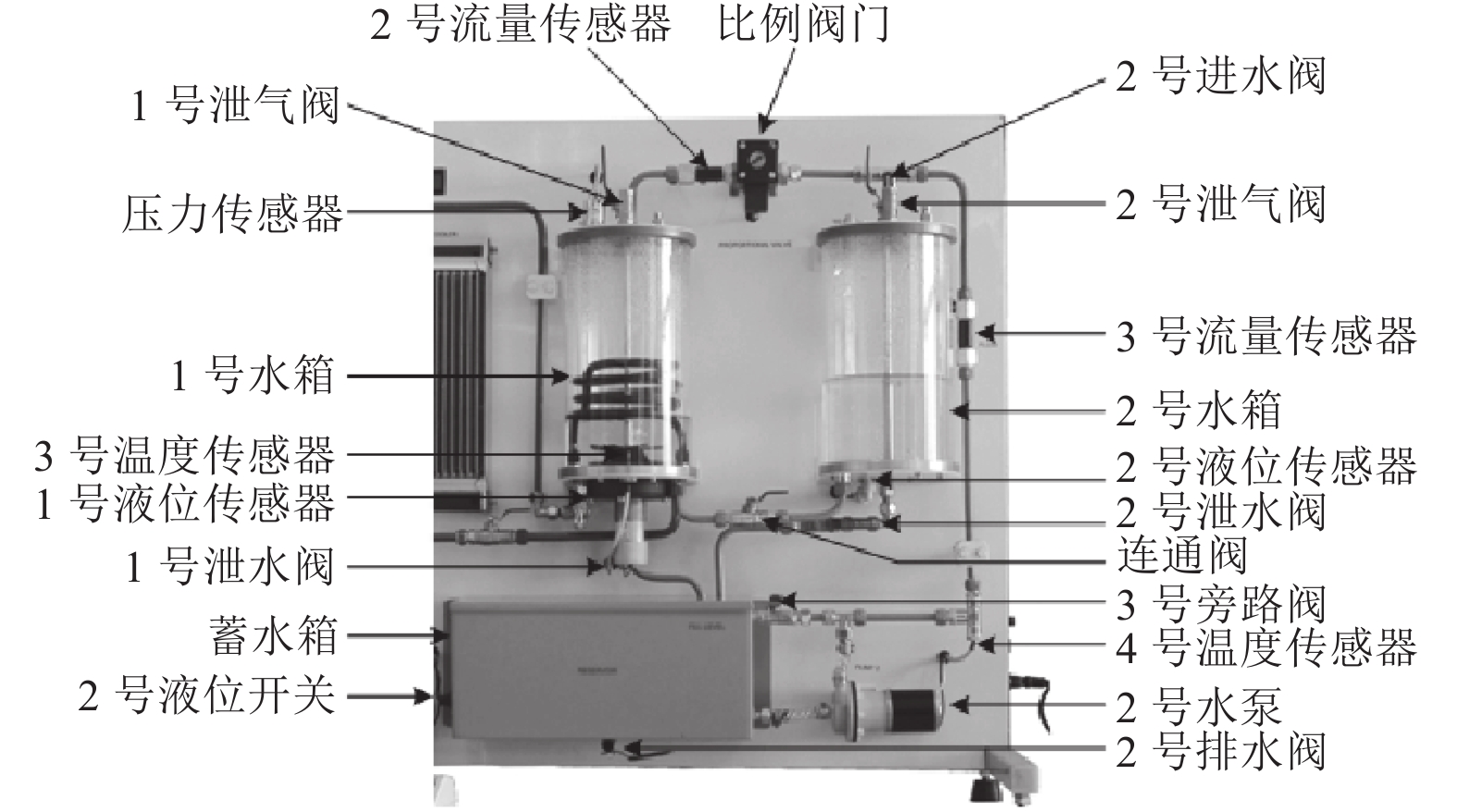
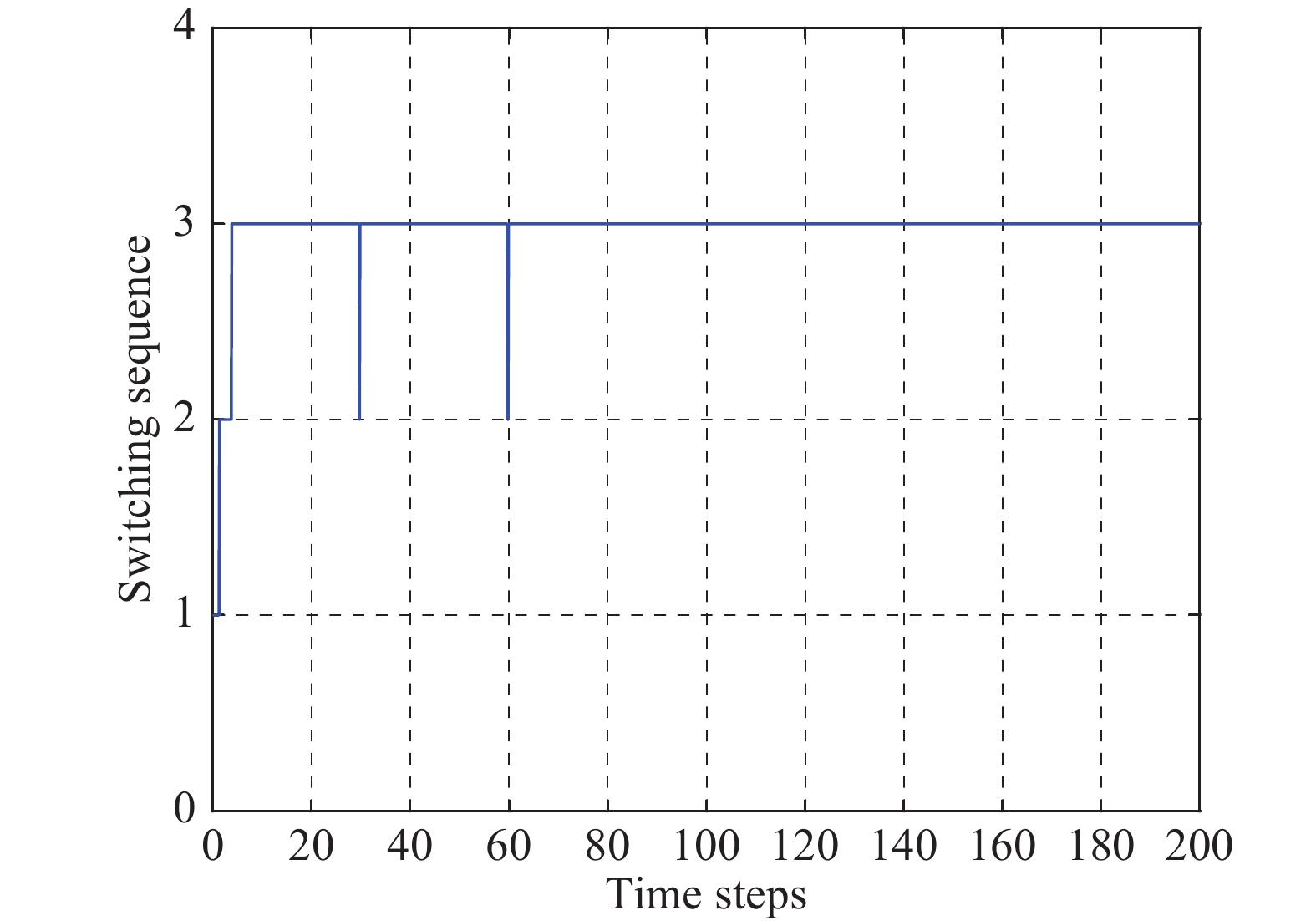
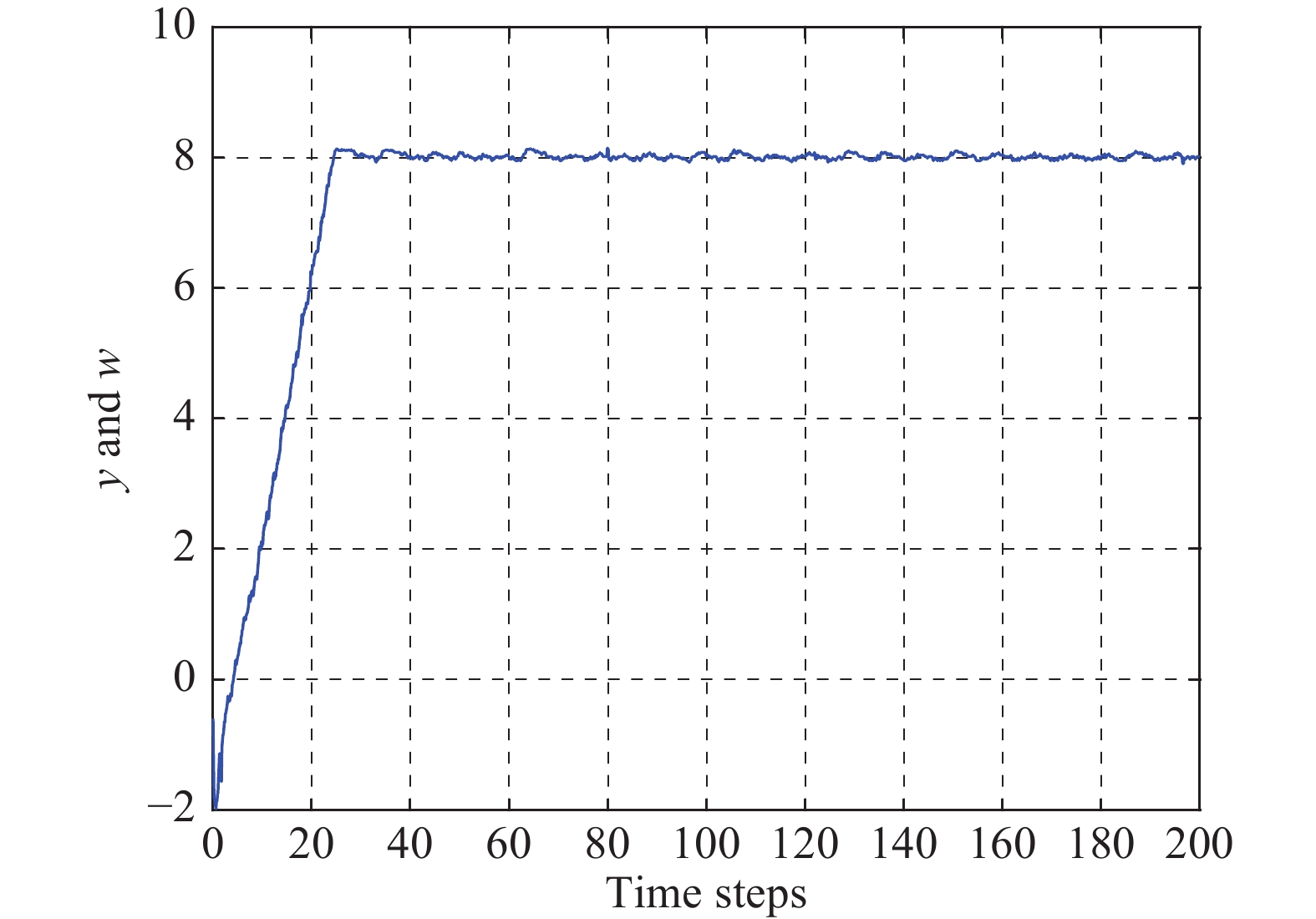
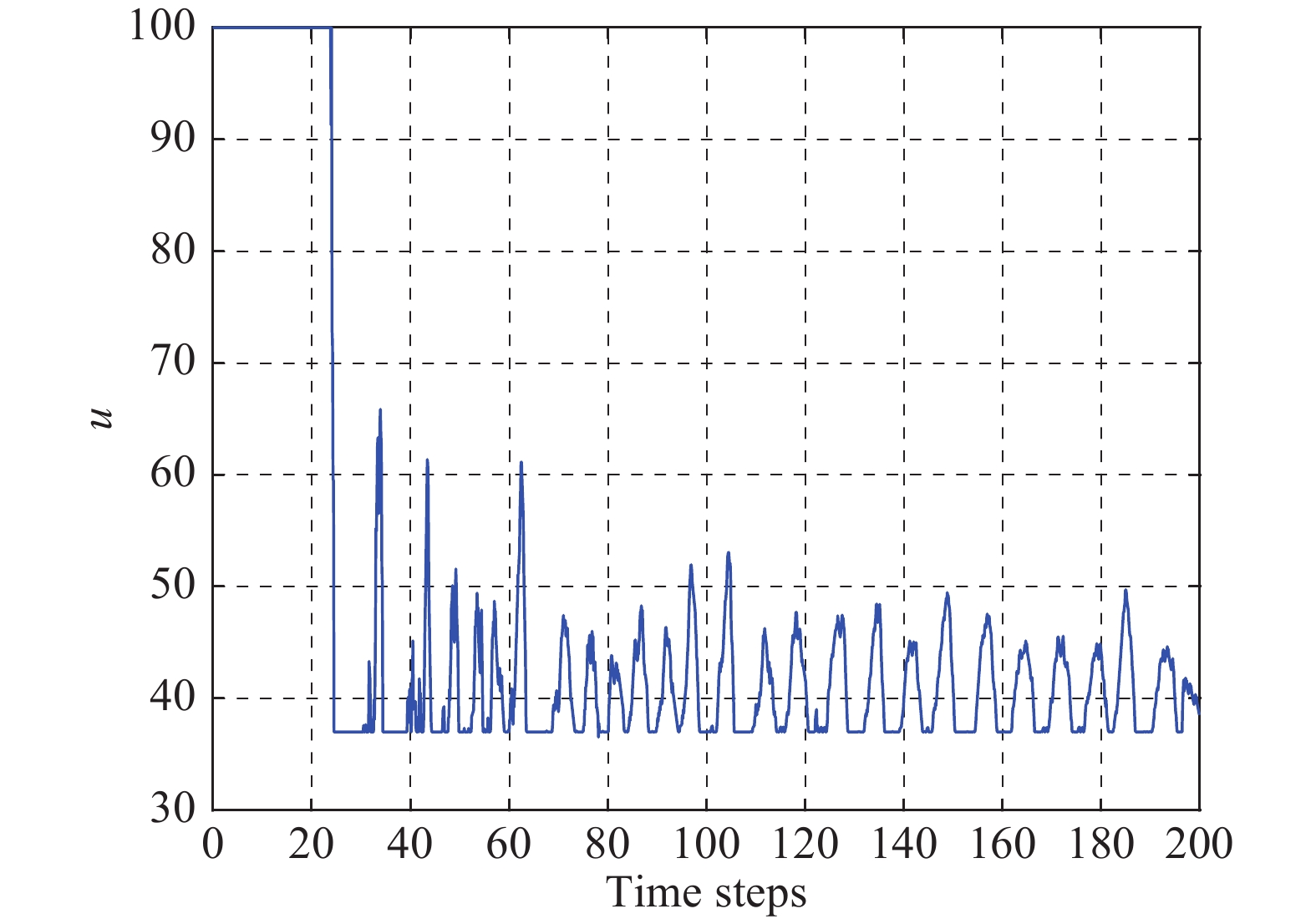
针对一类非线性离散时间动态系统, 提出了一种新的非线性自适应切换控制方法. 该方法首先把非线性项分解为前一拍可测部分与未知增量和的形式, 并充分利用被控对象的大数据信息和知识, 把非线性项前一拍可测数据与未知增量都用于控制器设计, 分别设计了线性自适应控制器, 带有非线性项前一拍可测数据补偿的非线性自适应控制器以及带有非线性项未知增量估计与补偿的非线性自适应控制器. 三个自适应控制器通过切换函数和切换规则来协调控制被控对象. 既保证了闭环系统的稳定性, 同时又提高了闭环系统的性能. 分析了闭环切换系统的稳定性和收敛性. 最后, 通过水箱液位系统的物理实验, 实验结果验证了所提算法的有效性.
针对一类非线性离散时间动态系统, 提出了一种新的非线性自适应切换控制方法. 该方法首先把非线性项分解为前一拍可测部分与未知增量和的形式, 并充分利用被控对象的大数据信息和知识, 把非线性项前一拍可测数据与未知增量都用于控制器设计, 分别设计了线性自适应控制器, 带有非线性项前一拍可测数据补偿的非线性自适应控制器以及带有非线性项未知增量估计与补偿的非线性自适应控制器. 三个自适应控制器通过切换函数和切换规则来协调控制被控对象. 既保证了闭环系统的稳定性, 同时又提高了闭环系统的性能. 分析了闭环切换系统的稳定性和收敛性. 最后, 通过水箱液位系统的物理实验, 实验结果验证了所提算法的有效性.
2020, 46(11): 2367-2378.
doi: 10.16383/j.aas.c180847
摘要:
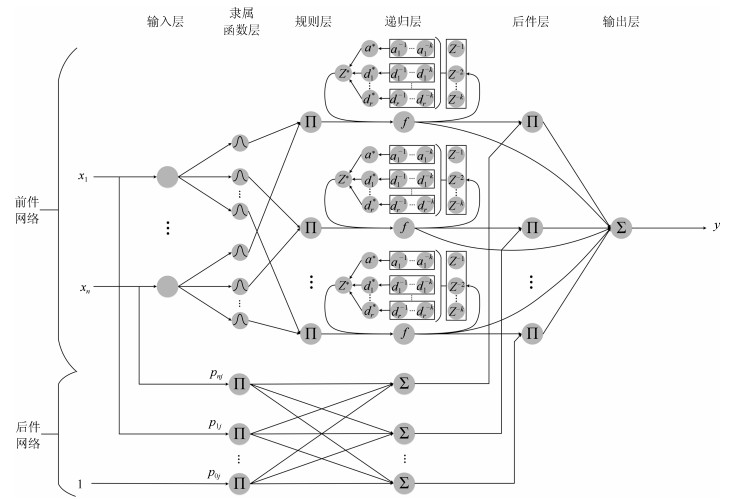
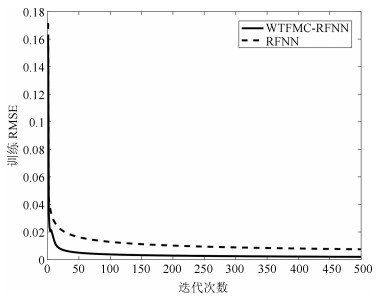
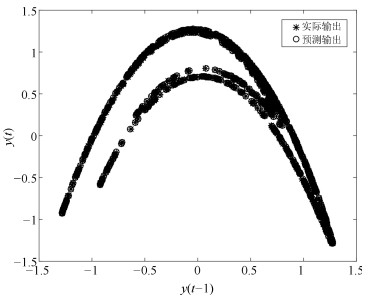
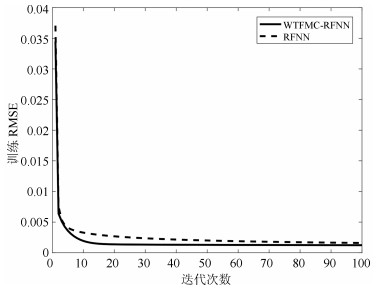
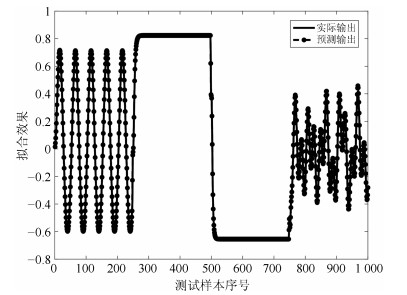
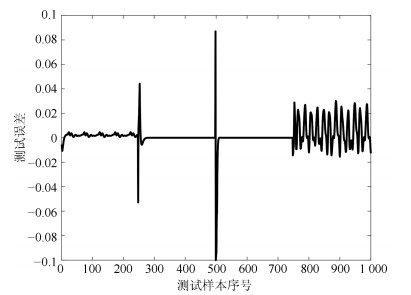
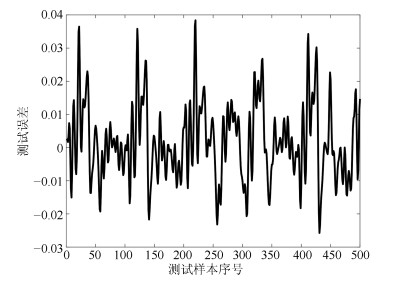
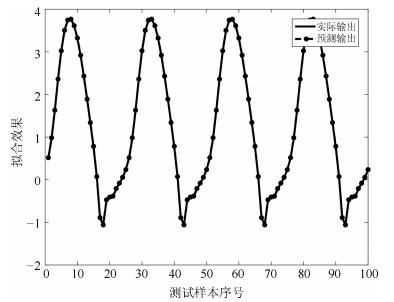
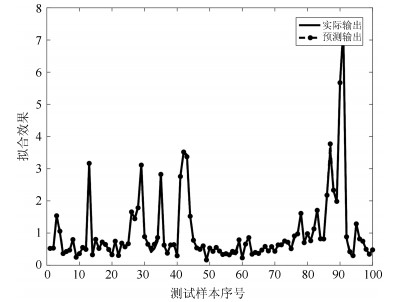
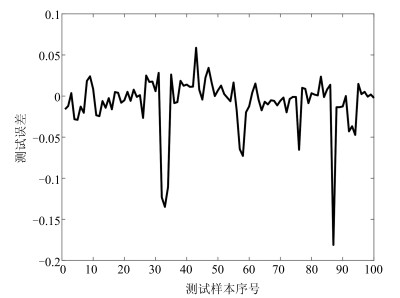
针对递归模糊神经网络(Recurrent fuzzy neural network, RFNN)的递归量难以自适应的问题, 提出一种基于小波变换–模糊马尔科夫链(Wavelet transform fuzzy Markov chain, WTFMC)算法的RFNN模型.首先, 在时间维度上记录隐含层神经元的模糊隶属度, 并采用小波变换将该时间序列进行分解, 通过模糊马尔科夫链对子序列的未来时段进行预测, 之后将各预测量合并后代入递归函数中得到具有自适应性的递归量.其次, 利用梯度下降算法更新RFNN的参数来保证神经网络的精度.最后, 通过非线性系统建模中几个基准问题和实际污水处理中关键水质参数的预测实验, 证明了该神经网络模型的可行性和有效性.
针对递归模糊神经网络(Recurrent fuzzy neural network, RFNN)的递归量难以自适应的问题, 提出一种基于小波变换–模糊马尔科夫链(Wavelet transform fuzzy Markov chain, WTFMC)算法的RFNN模型.首先, 在时间维度上记录隐含层神经元的模糊隶属度, 并采用小波变换将该时间序列进行分解, 通过模糊马尔科夫链对子序列的未来时段进行预测, 之后将各预测量合并后代入递归函数中得到具有自适应性的递归量.其次, 利用梯度下降算法更新RFNN的参数来保证神经网络的精度.最后, 通过非线性系统建模中几个基准问题和实际污水处理中关键水质参数的预测实验, 证明了该神经网络模型的可行性和有效性.






2020, 46(11): 2379-2391.
doi: 10.16383/j.aas.c190635
摘要:
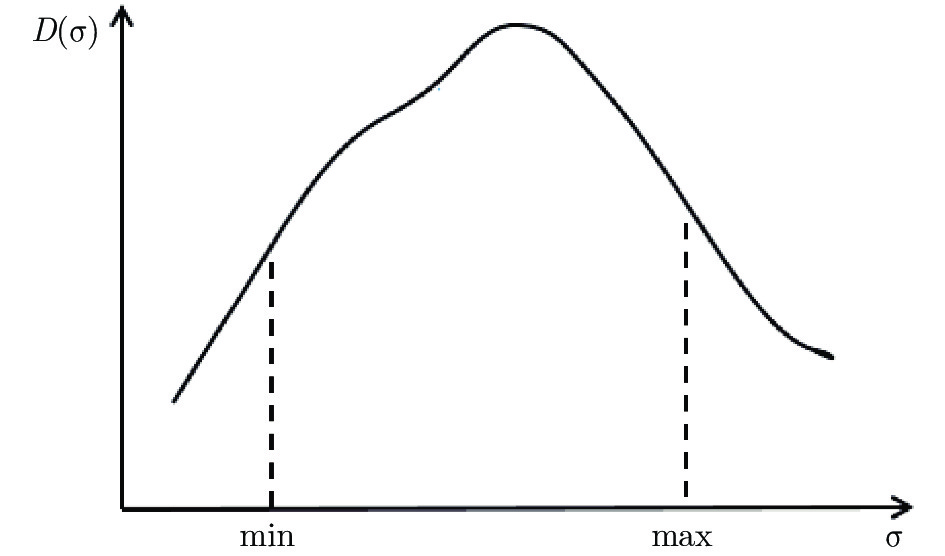
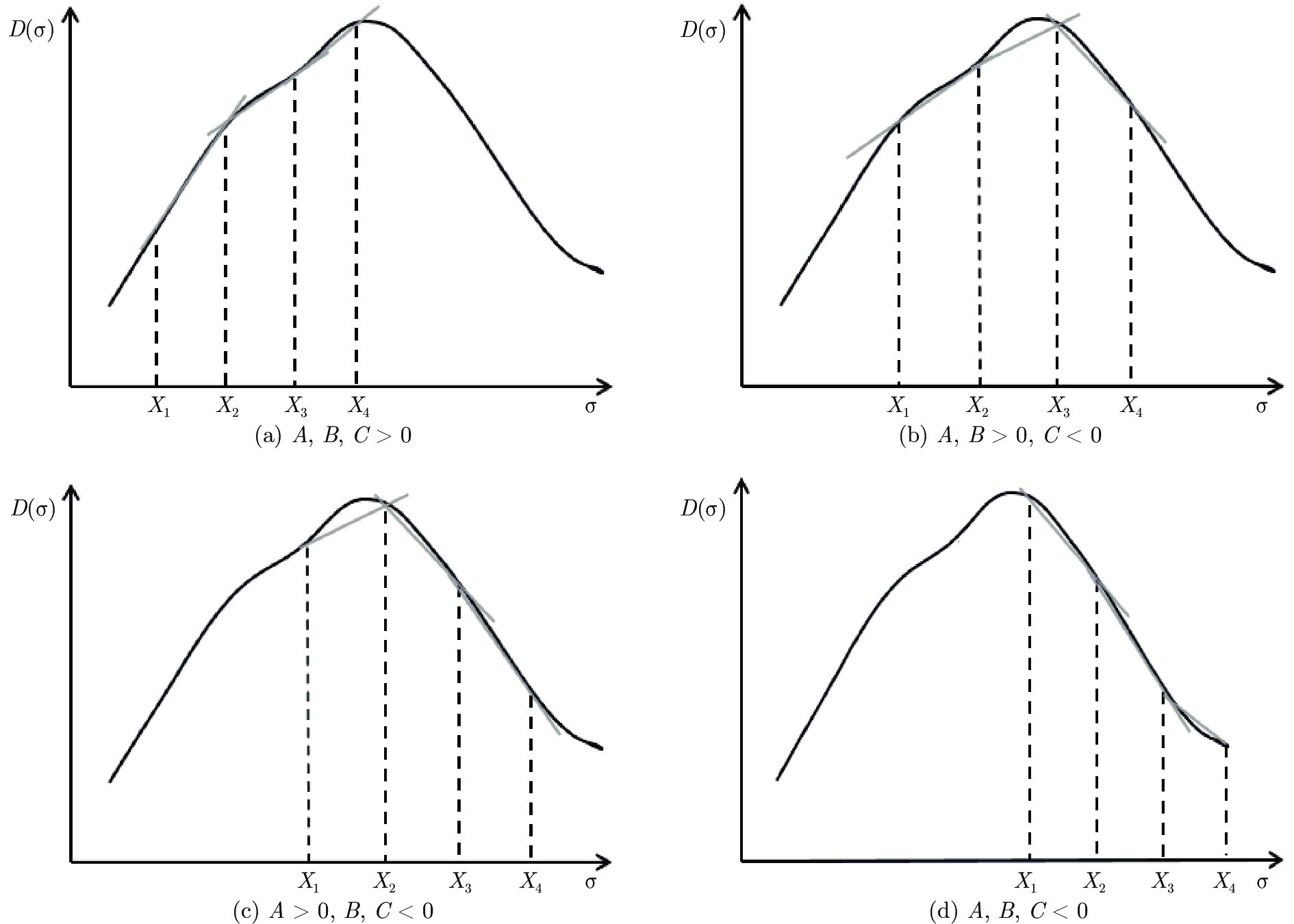
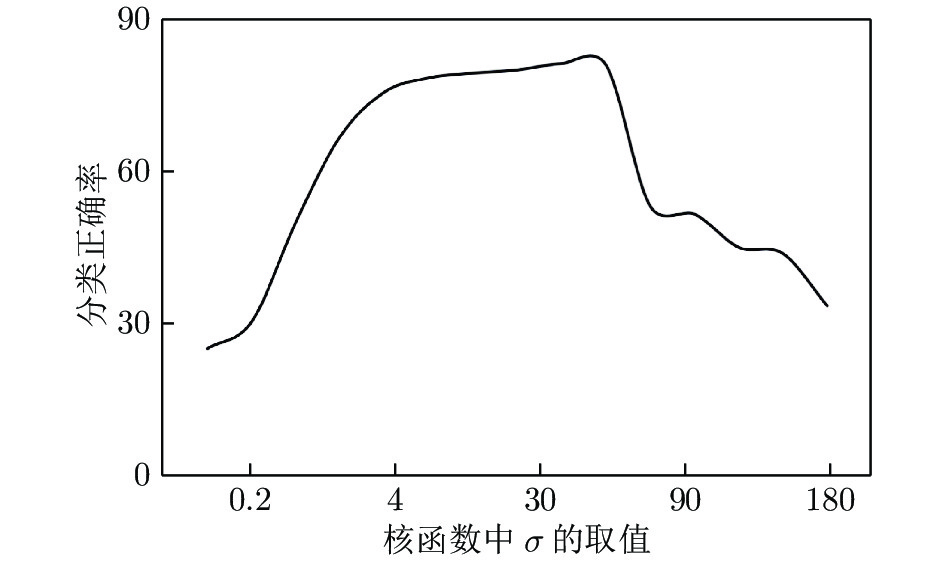
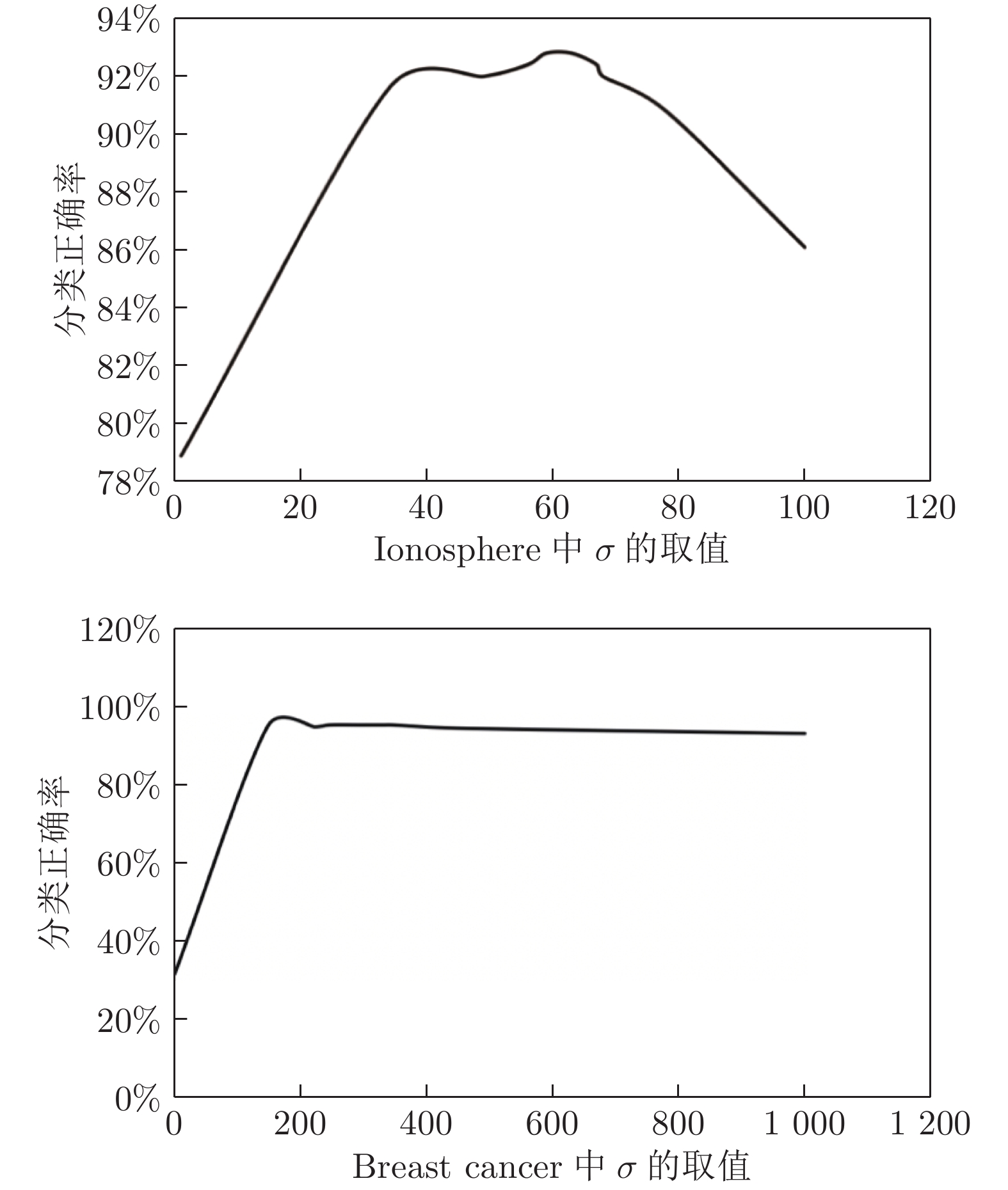
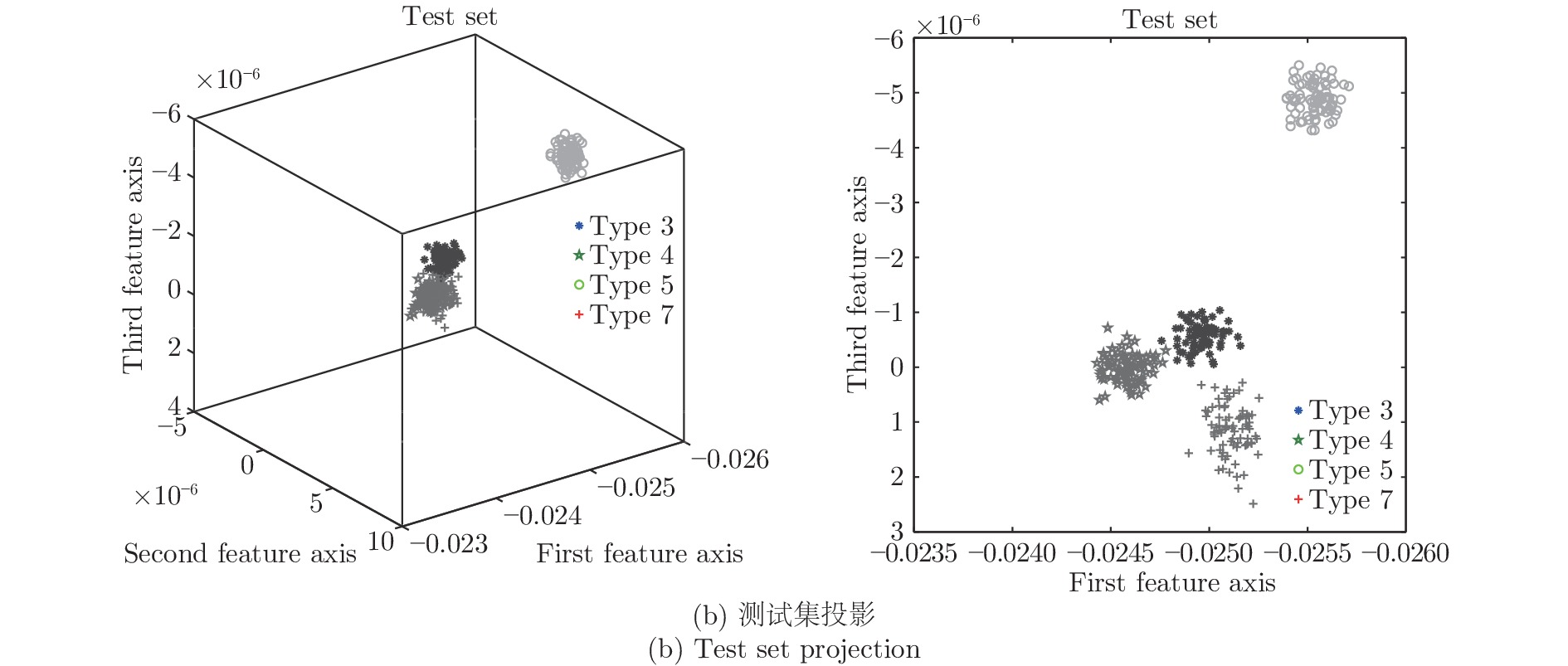
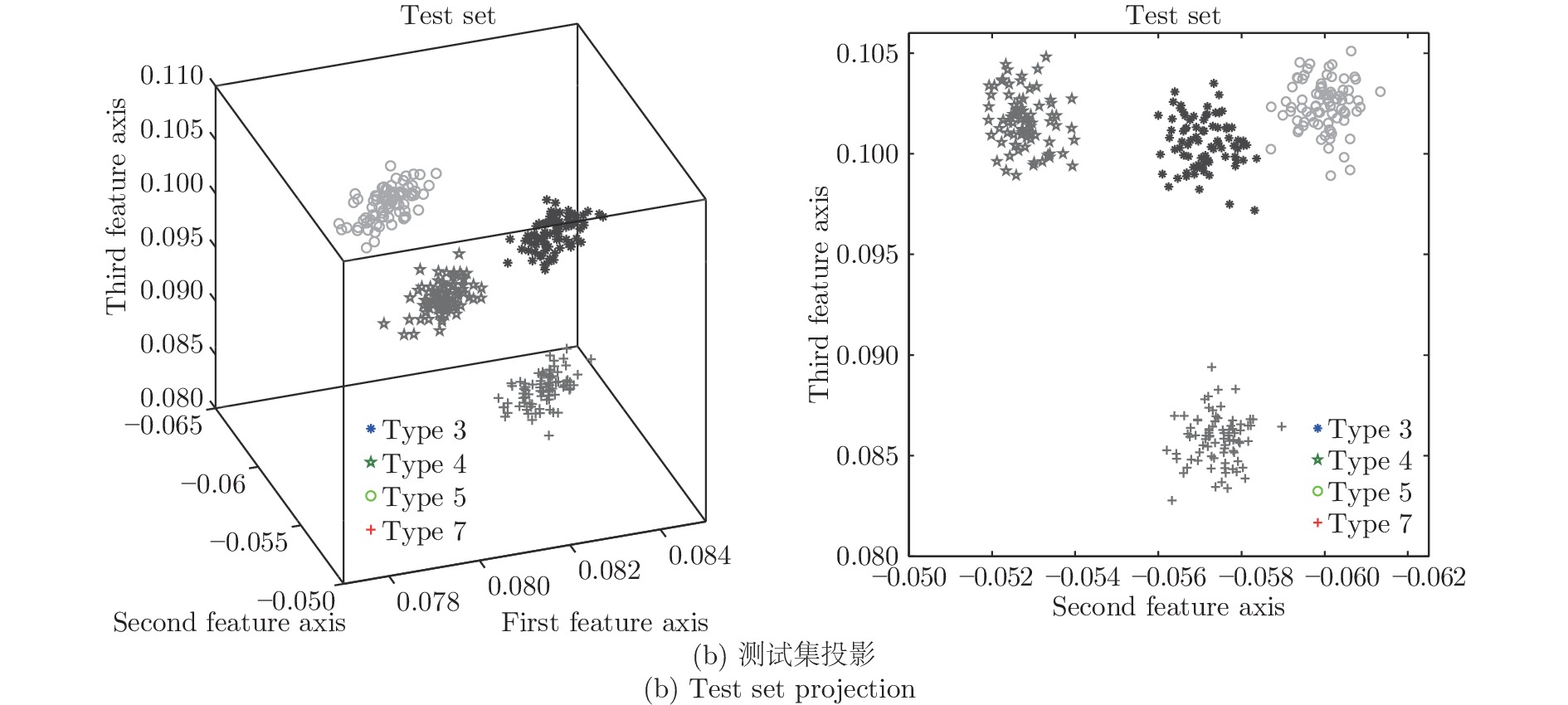
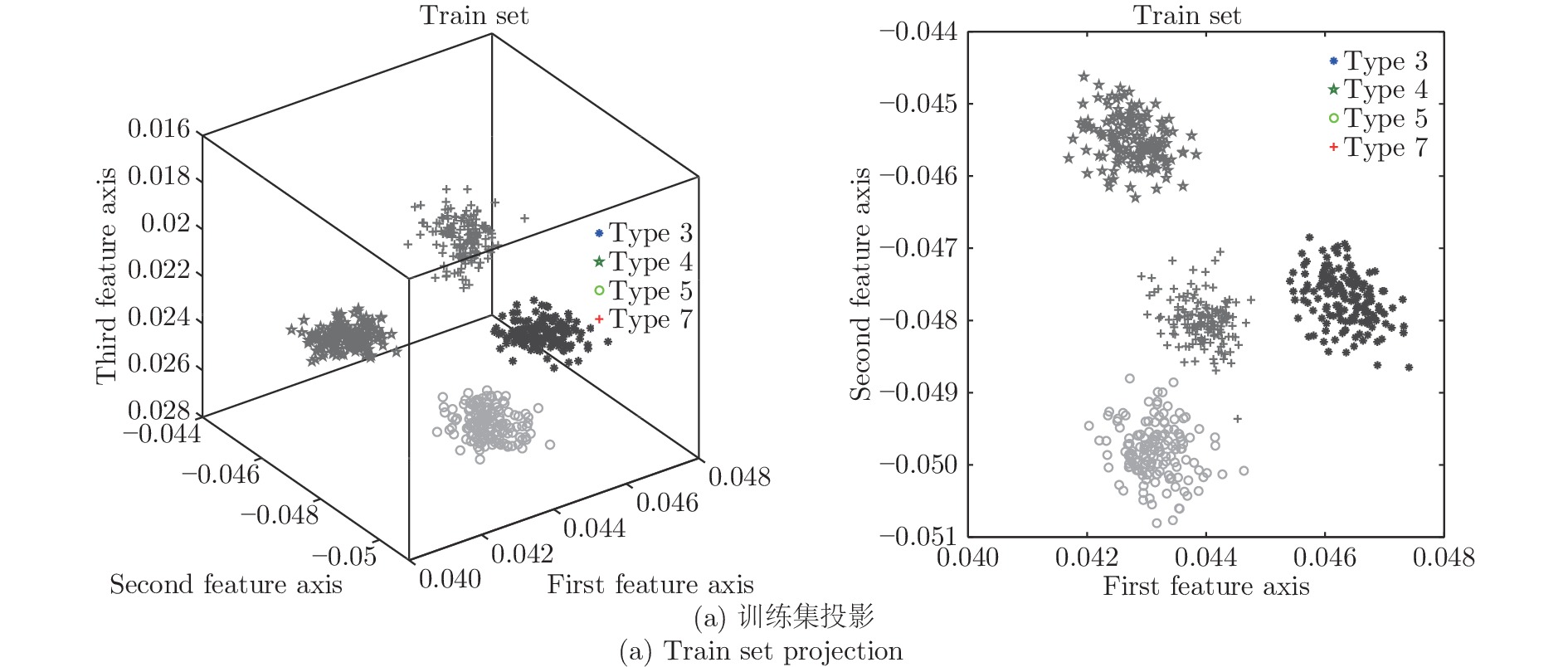
针对化工故障诊断数据存在非线性分布、 数据类别复杂、数据量大且故障特征不易区分等问题, 本文提出一种基于马氏距离的改进核Fisher故障诊断方法(Mahalanobis distance-based kernel Fisher discrimination, MKFD). 首先, 针对数据非线性分布的特点, 本文将核Fisher判别分析算法改进, 改进后的算法可以有效解决原始样本在投影后出现的因类间距离差异过大、类内距离不够紧凑造成的样本混叠现象. 除此之外, 利用Euclidean距离对类间距做加权处理时, 用组平均距离取代质心距离, 提升了运算效率, 降低了时间复杂度; 其次, 根据高斯径向基核函数(Radial basis function, RBF)在MKFD中所呈现出的诊断精度的规律, 本文采用一种新的核参数选择方法: 区间三分法, 用以取代在实际应用中依靠经验的交叉验证法; 最后, 本文采用马氏距离对故障进行分类, 基于田纳西伊—斯特曼过程(Tennessee-Eastman, TE)数据将本方法与其他改进核Fisher算法进行仿真验证对比. 结果表明新提出MKFD算法不仅可以提高故障诊断的运算效率, 也能有效提高诊断的精度.
针对化工故障诊断数据存在非线性分布、 数据类别复杂、数据量大且故障特征不易区分等问题, 本文提出一种基于马氏距离的改进核Fisher故障诊断方法(Mahalanobis distance-based kernel Fisher discrimination, MKFD). 首先, 针对数据非线性分布的特点, 本文将核Fisher判别分析算法改进, 改进后的算法可以有效解决原始样本在投影后出现的因类间距离差异过大、类内距离不够紧凑造成的样本混叠现象. 除此之外, 利用Euclidean距离对类间距做加权处理时, 用组平均距离取代质心距离, 提升了运算效率, 降低了时间复杂度; 其次, 根据高斯径向基核函数(Radial basis function, RBF)在MKFD中所呈现出的诊断精度的规律, 本文采用一种新的核参数选择方法: 区间三分法, 用以取代在实际应用中依靠经验的交叉验证法; 最后, 本文采用马氏距离对故障进行分类, 基于田纳西伊—斯特曼过程(Tennessee-Eastman, TE)数据将本方法与其他改进核Fisher算法进行仿真验证对比. 结果表明新提出MKFD算法不仅可以提高故障诊断的运算效率, 也能有效提高诊断的精度.





2020, 46(11): 2392-2403.
doi: 10.16383/j.aas.c180849
摘要:
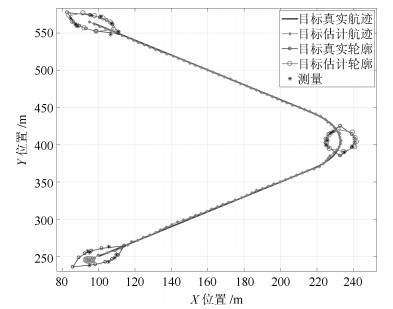
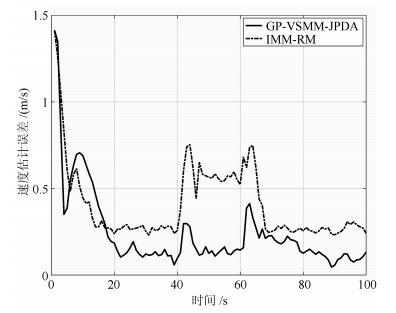
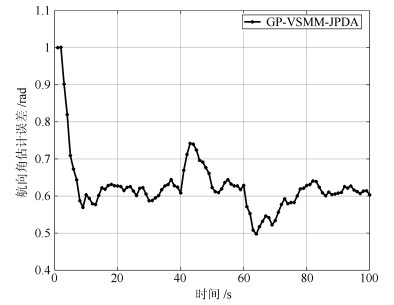
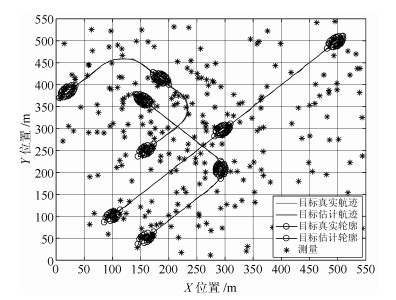
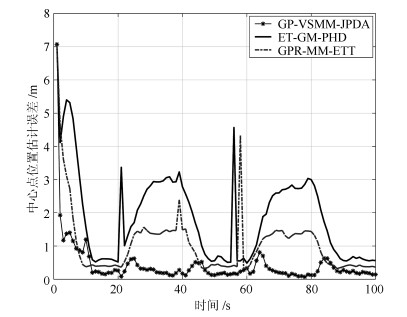
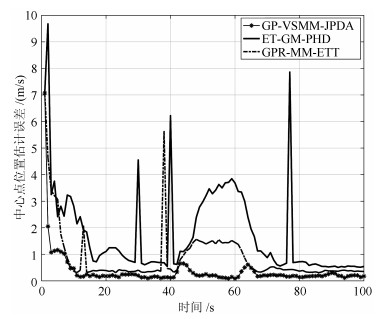
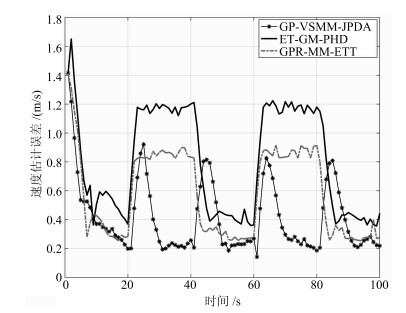
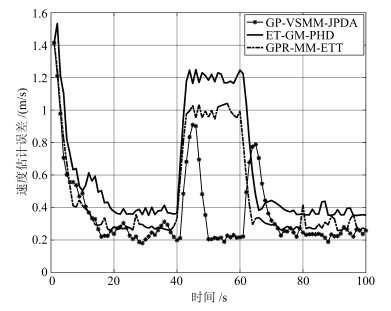
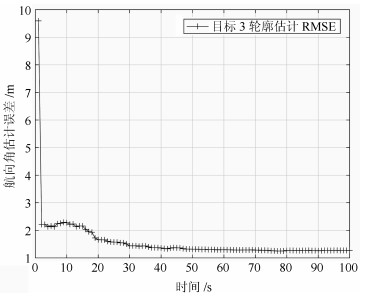
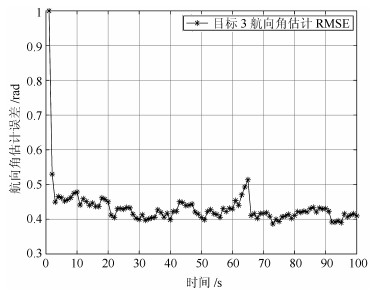
针对杂波环境下多机动扩展目标跟踪问题, 提出一种基于高斯过程的变结构多模型联合概率数据关联方法.首先, 采用期望模型扩展方法构建自适应模型集, 并对各个扩展目标状态进行初始化.其次, 基于高斯过程建立联合跟踪门以选择有效量测, 形成联合关联矩阵.然后, 拆分联合关联矩阵得到可行关联矩阵并求解关联事件概率.最后, 利用联合概率数据关联滤波器更新各个扩展目标的状态和协方差, 并将更新的状态进行融合, 得到最终的状态估计.仿真验证了所提方法的有效性.
针对杂波环境下多机动扩展目标跟踪问题, 提出一种基于高斯过程的变结构多模型联合概率数据关联方法.首先, 采用期望模型扩展方法构建自适应模型集, 并对各个扩展目标状态进行初始化.其次, 基于高斯过程建立联合跟踪门以选择有效量测, 形成联合关联矩阵.然后, 拆分联合关联矩阵得到可行关联矩阵并求解关联事件概率.最后, 利用联合概率数据关联滤波器更新各个扩展目标的状态和协方差, 并将更新的状态进行融合, 得到最终的状态估计.仿真验证了所提方法的有效性.


2020, 46(11): 2404-2416.
doi: 10.16383/j.aas.c180041
摘要:
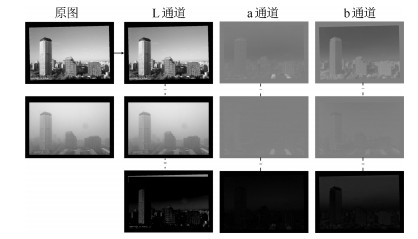
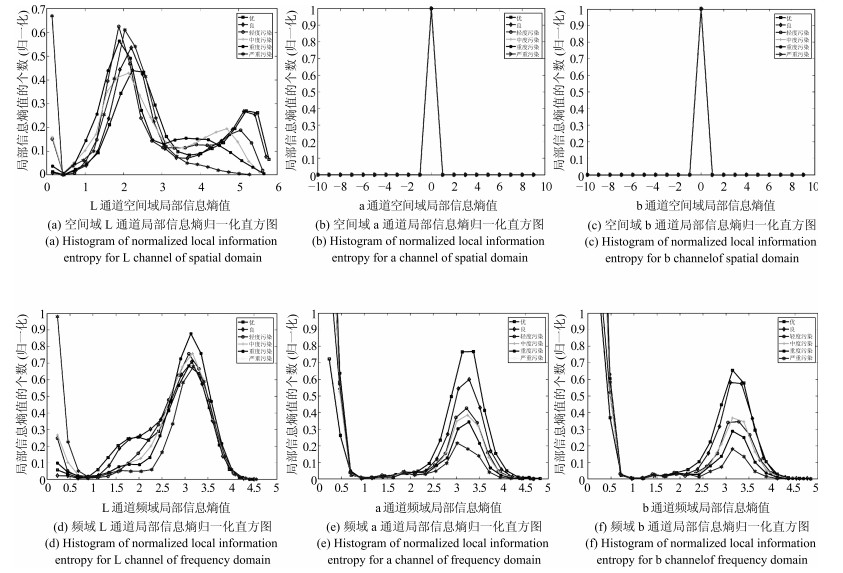
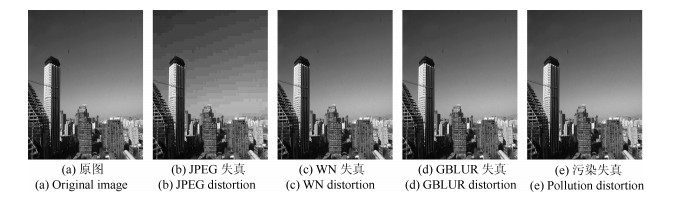
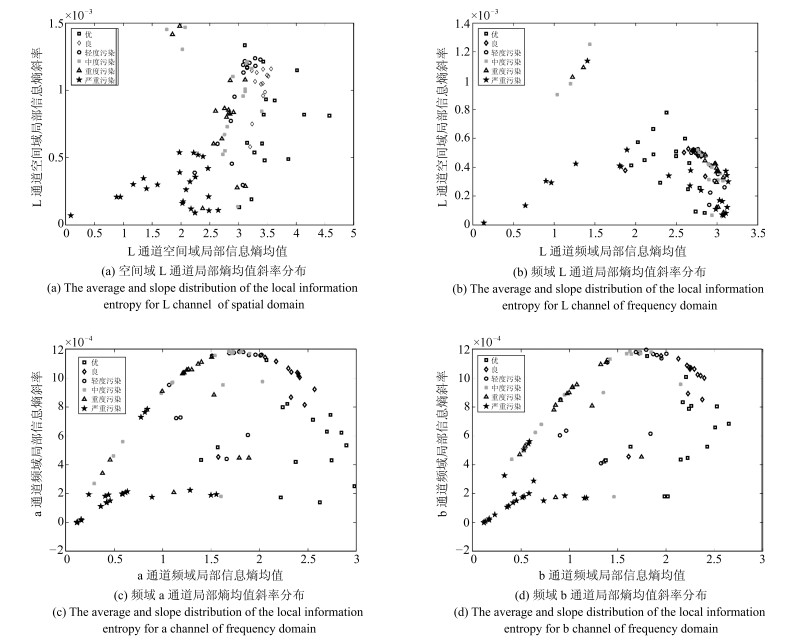
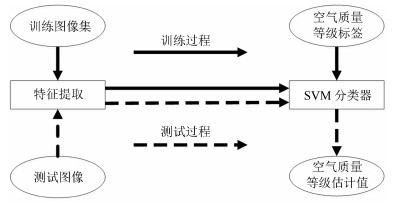
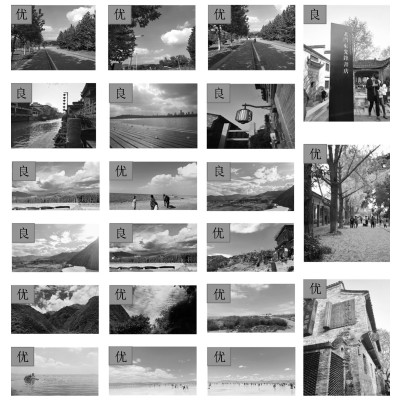
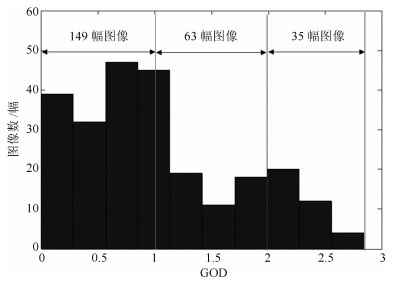
目前国内主要依靠各种精密仪器检测空气中的污染物浓度.由于仪器的成本较高, 国家通过在每个城市设立监测站来检测空气质量, 这种空气质量检测方法是粗粒度的, 不能覆盖城市的每个角落.本文提出了一种基于图像的空气质量等级检测方法, 旨在通过移动设备采集的图像检测空气质量等级, 移动设备的普及使得通过图像细粒度检测空气质量成为可能, 该方法利用空气污染对图像颜色通道和灰度通道局部信息熵的影响构建空气质量等级检测模型.在本文构建的空气质量图像库进行了模型测试和比较分析, 实验结果表明:本文方法能够准确地评估空气质量等级, 比其他已有相关方法更适用于空气质量等级检测.
目前国内主要依靠各种精密仪器检测空气中的污染物浓度.由于仪器的成本较高, 国家通过在每个城市设立监测站来检测空气质量, 这种空气质量检测方法是粗粒度的, 不能覆盖城市的每个角落.本文提出了一种基于图像的空气质量等级检测方法, 旨在通过移动设备采集的图像检测空气质量等级, 移动设备的普及使得通过图像细粒度检测空气质量成为可能, 该方法利用空气污染对图像颜色通道和灰度通道局部信息熵的影响构建空气质量等级检测模型.在本文构建的空气质量图像库进行了模型测试和比较分析, 实验结果表明:本文方法能够准确地评估空气质量等级, 比其他已有相关方法更适用于空气质量等级检测.






2020, 46(11): 2417-2426.
doi: 10.16383/j.aas.c180247
摘要:
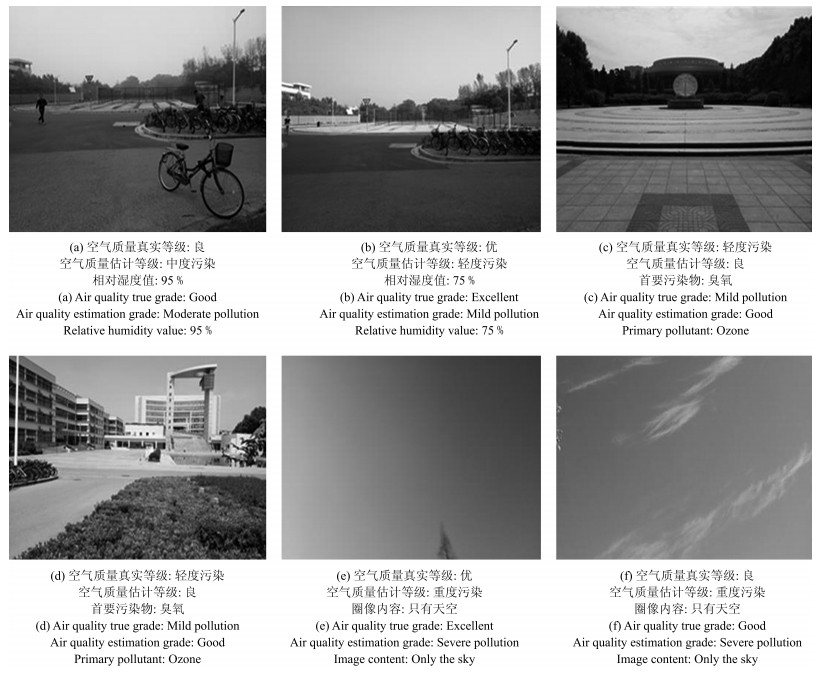
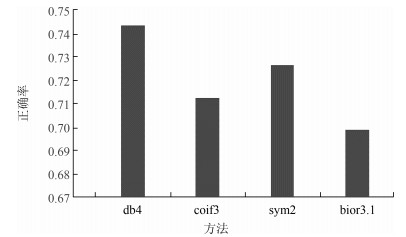
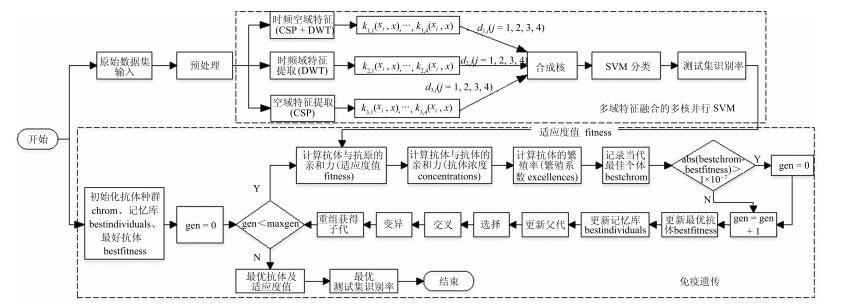
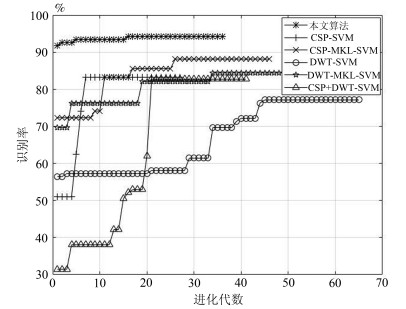
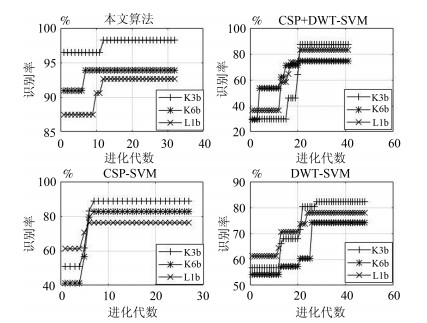
针对多通道四类运动想象(Motor imagery, MI)脑电信号(Electroencephalography, EEG)的分类问题, 提出免疫多域特征融合的多核学习SVM (Support vector machine)运动想象脑电信号分类算法.首先, 通过离散小波变换(Discrete wavelet transform, DWT)提取脑电信号的时频域特征, 并利用一对多公共空间模式(One versus the rest common spatial patterns, OVR-CSP)提取脑电信号的空域特征, 融合时频空域特征形成特征向量.其次, 利用多核学习支持向量机(Multiple kernel learning support vector machine, MKL-SVM)对提取的特征向量进行分类.最后, 利用免疫遗传算法(Immune genetic algorithm, IGA)对模型的相关参数进行优化, 得到识别率更高的脑电信号分类模型.采用BCI2005desc-Ⅲa数据集进行实验验证, 对比结果表明, 本文所提出的分类模型有效地解决了传统单域特征提取算法特征单一、信息描述不足的问题, 更准确地表达了不同受试者个性化的多域特征, 取得了94.21%的识别率, 优于使用相同数据集的其他方法.
针对多通道四类运动想象(Motor imagery, MI)脑电信号(Electroencephalography, EEG)的分类问题, 提出免疫多域特征融合的多核学习SVM (Support vector machine)运动想象脑电信号分类算法.首先, 通过离散小波变换(Discrete wavelet transform, DWT)提取脑电信号的时频域特征, 并利用一对多公共空间模式(One versus the rest common spatial patterns, OVR-CSP)提取脑电信号的空域特征, 融合时频空域特征形成特征向量.其次, 利用多核学习支持向量机(Multiple kernel learning support vector machine, MKL-SVM)对提取的特征向量进行分类.最后, 利用免疫遗传算法(Immune genetic algorithm, IGA)对模型的相关参数进行优化, 得到识别率更高的脑电信号分类模型.采用BCI2005desc-Ⅲa数据集进行实验验证, 对比结果表明, 本文所提出的分类模型有效地解决了传统单域特征提取算法特征单一、信息描述不足的问题, 更准确地表达了不同受试者个性化的多域特征, 取得了94.21%的识别率, 优于使用相同数据集的其他方法.




2020, 46(11): 2427-2438.
doi: 10.16383/j.aas.c180581
摘要:
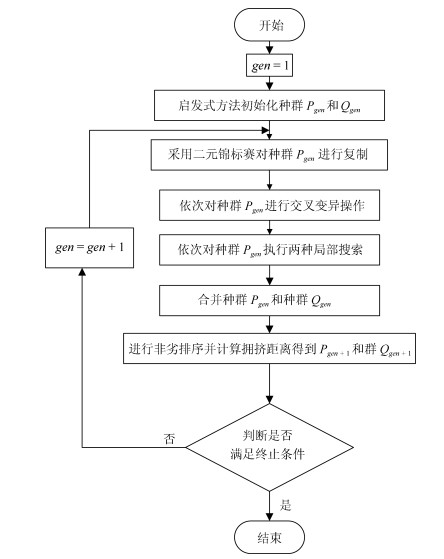
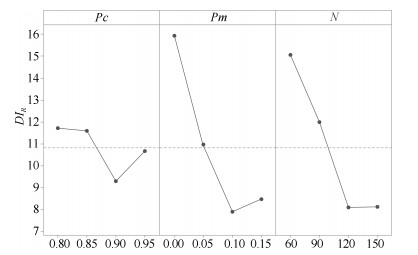
针对分布式低碳并行机调度问题(Distributed low carbon parallel machine scheduling problem, DLCPMSP), 由于该问题子问题众多, 为此, 首先将问题转换为扩展的低碳不相关并行机调度问题以降低子问题的数量; 然后提出了一种基于问题性质的非劣排序遗传算法-Ⅱ(Property-based non-dominated sorting genetic algorithm-Ⅱ, PNSGA-Ⅱ)以同时最优化总延迟时间和总能耗, 该算法运用针对问题特征的两种启发式算法初始化种群, 给出了问题的四种性质及证明, 提出了两种基于问题性质的局部搜索方法.运用大量实例进行了算法策略分析和对比实验, 结果分析表明, PNSGA-Ⅱ在求解DLCPMSP方面具有较强优势.
针对分布式低碳并行机调度问题(Distributed low carbon parallel machine scheduling problem, DLCPMSP), 由于该问题子问题众多, 为此, 首先将问题转换为扩展的低碳不相关并行机调度问题以降低子问题的数量; 然后提出了一种基于问题性质的非劣排序遗传算法-Ⅱ(Property-based non-dominated sorting genetic algorithm-Ⅱ, PNSGA-Ⅱ)以同时最优化总延迟时间和总能耗, 该算法运用针对问题特征的两种启发式算法初始化种群, 给出了问题的四种性质及证明, 提出了两种基于问题性质的局部搜索方法.运用大量实例进行了算法策略分析和对比实验, 结果分析表明, PNSGA-Ⅱ在求解DLCPMSP方面具有较强优势.

2020, 46(11): 2439-2447.
doi: 10.16383/j.aas.c180527
摘要:
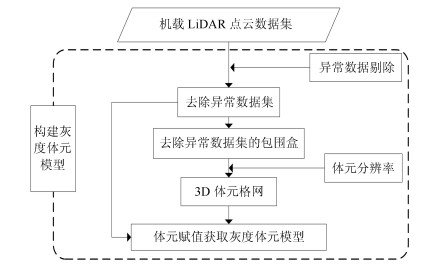
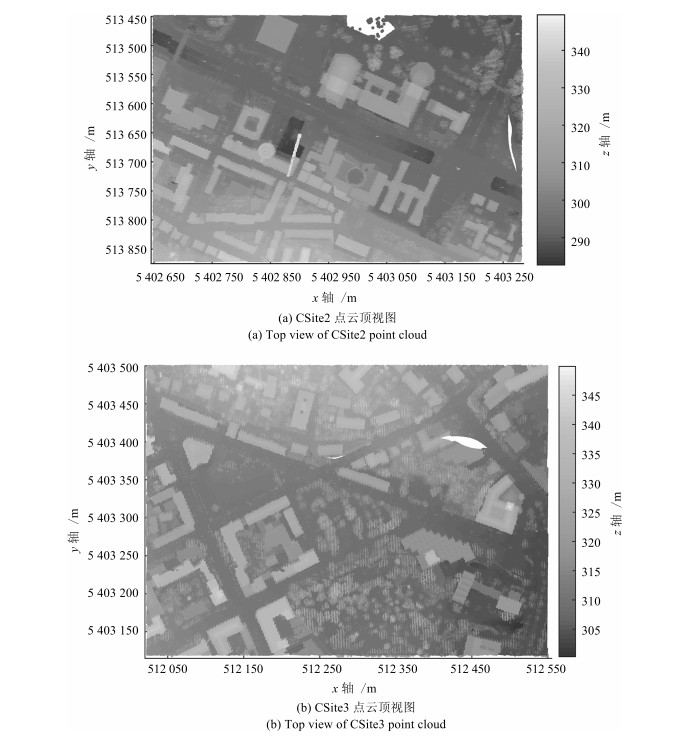
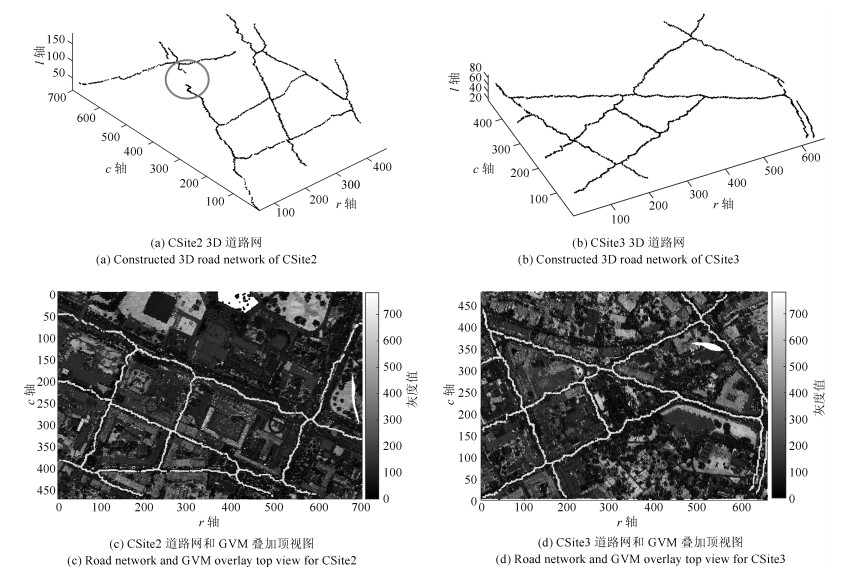
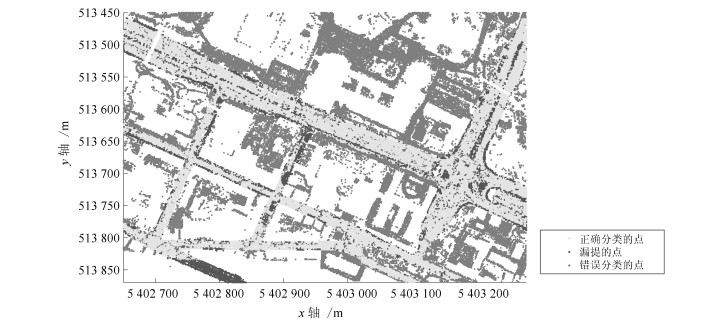
面向机载LiDAR数据的道路提取算法的常用数据结构存在局限: 2D格网及TIN表达多次回波数据时存在的信息损失会影响提取结果的完整性且提取结果为2D形式; 点云的空间结构及拓扑信息难以利用, 由此导致算法设计的困难.为此, 提出了一种基于灰度体元模型的3D道路提取算法.算法首先将LiDAR数据规则化为灰度体元模型(灰度为体元内LiDAR点的平均强度值的量化表示); 然后选取道路种子体元进而搜寻并标记种子及其3D连通区域为道路体元; 最后利用数学形态学优化提取结果.基于ISPRS提供的包含不同复杂程度的城区路网LiDAR数据测试"邻域尺度"和"灰度差阈值"参数的敏感性及提出的算法的精度.实验结果表明: 56邻域为最佳邻域尺度、2为最佳灰度差阈值; 道路提取的平均质量、完整度及正确率分别为70%、86.77%及81.13%;对相对平坦的单层路网及起伏较大的复杂路网均可成功提取.
面向机载LiDAR数据的道路提取算法的常用数据结构存在局限: 2D格网及TIN表达多次回波数据时存在的信息损失会影响提取结果的完整性且提取结果为2D形式; 点云的空间结构及拓扑信息难以利用, 由此导致算法设计的困难.为此, 提出了一种基于灰度体元模型的3D道路提取算法.算法首先将LiDAR数据规则化为灰度体元模型(灰度为体元内LiDAR点的平均强度值的量化表示); 然后选取道路种子体元进而搜寻并标记种子及其3D连通区域为道路体元; 最后利用数学形态学优化提取结果.基于ISPRS提供的包含不同复杂程度的城区路网LiDAR数据测试"邻域尺度"和"灰度差阈值"参数的敏感性及提出的算法的精度.实验结果表明: 56邻域为最佳邻域尺度、2为最佳灰度差阈值; 道路提取的平均质量、完整度及正确率分别为70%、86.77%及81.13%;对相对平坦的单层路网及起伏较大的复杂路网均可成功提取.



2020, 46(11): 2448-2460.
doi: 10.16383/j.aas.c180069
摘要:
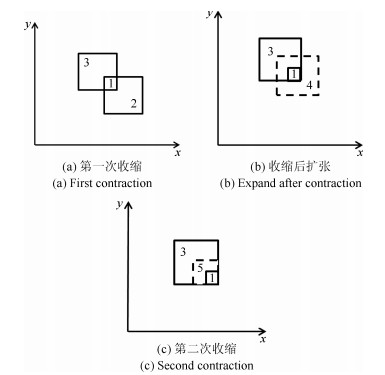
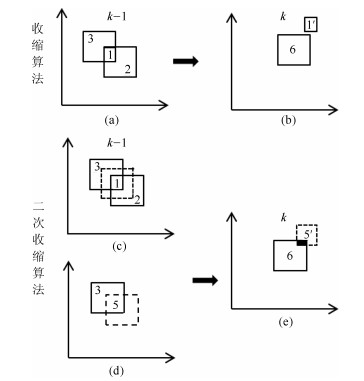
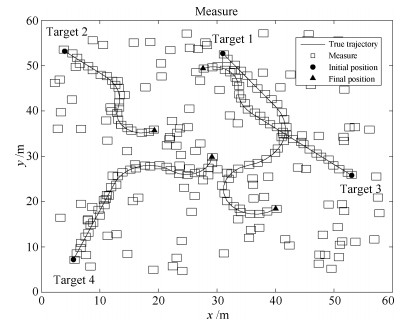
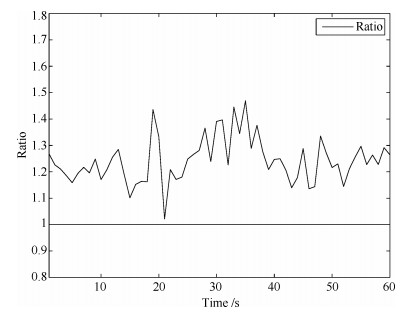
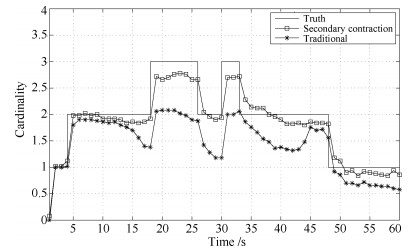
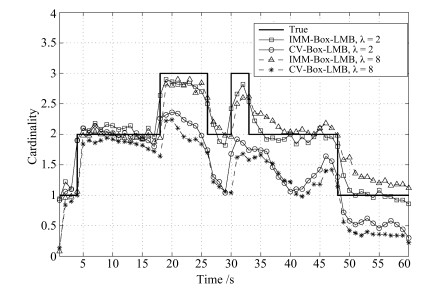
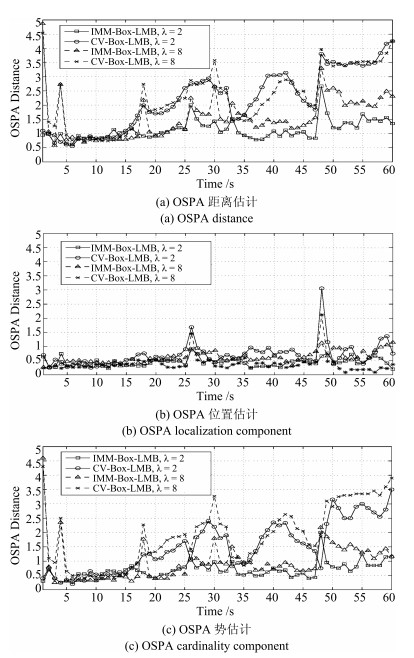
针对多机动目标追踪问题, 将交互式多模型(Interacting multiple model, IMM)思想与箱粒子标签多伯努利滤波器(Box-labeled multi-bernoulli filter, Box-LMB)相结合, 提出交互式箱粒子标签多伯努利滤波器(IMM-Box-LMB)算法.该算法首先通过扩展多目标状态, 引入模型匹配概率变量, 并利用量测信息在预测阶段更新模型匹配概率, 进而使用交互式多模型算法对每个箱粒子状态进行混合估计.其次, 在更新阶段提出二次收缩算法, 通过二次收缩算法使更新后的箱粒子具有更大的区间和存活概率, 也更加接近真实目标位置, 从而达到提升后续时刻箱粒子多样性的目的.仿真结果表明, 二次收缩算法能够有效地提升箱粒子的多样性.将二次收缩算法应用于IMM-Box-LMB算法, 能够在不同信噪比下稳定准确地估计机动目标的个数.相同条件下, 与匀速直线运动(Constant velocity, CV)模型下的Box-LMB算法相比, IMM-Box-LMB算法能够对多机动目标的数目以及状态进行更加有效的估计.
针对多机动目标追踪问题, 将交互式多模型(Interacting multiple model, IMM)思想与箱粒子标签多伯努利滤波器(Box-labeled multi-bernoulli filter, Box-LMB)相结合, 提出交互式箱粒子标签多伯努利滤波器(IMM-Box-LMB)算法.该算法首先通过扩展多目标状态, 引入模型匹配概率变量, 并利用量测信息在预测阶段更新模型匹配概率, 进而使用交互式多模型算法对每个箱粒子状态进行混合估计.其次, 在更新阶段提出二次收缩算法, 通过二次收缩算法使更新后的箱粒子具有更大的区间和存活概率, 也更加接近真实目标位置, 从而达到提升后续时刻箱粒子多样性的目的.仿真结果表明, 二次收缩算法能够有效地提升箱粒子的多样性.将二次收缩算法应用于IMM-Box-LMB算法, 能够在不同信噪比下稳定准确地估计机动目标的个数.相同条件下, 与匀速直线运动(Constant velocity, CV)模型下的Box-LMB算法相比, IMM-Box-LMB算法能够对多机动目标的数目以及状态进行更加有效的估计.


2020, 46(11): 2461-2471.
doi: 10.16383/j.aas.c190534
摘要:
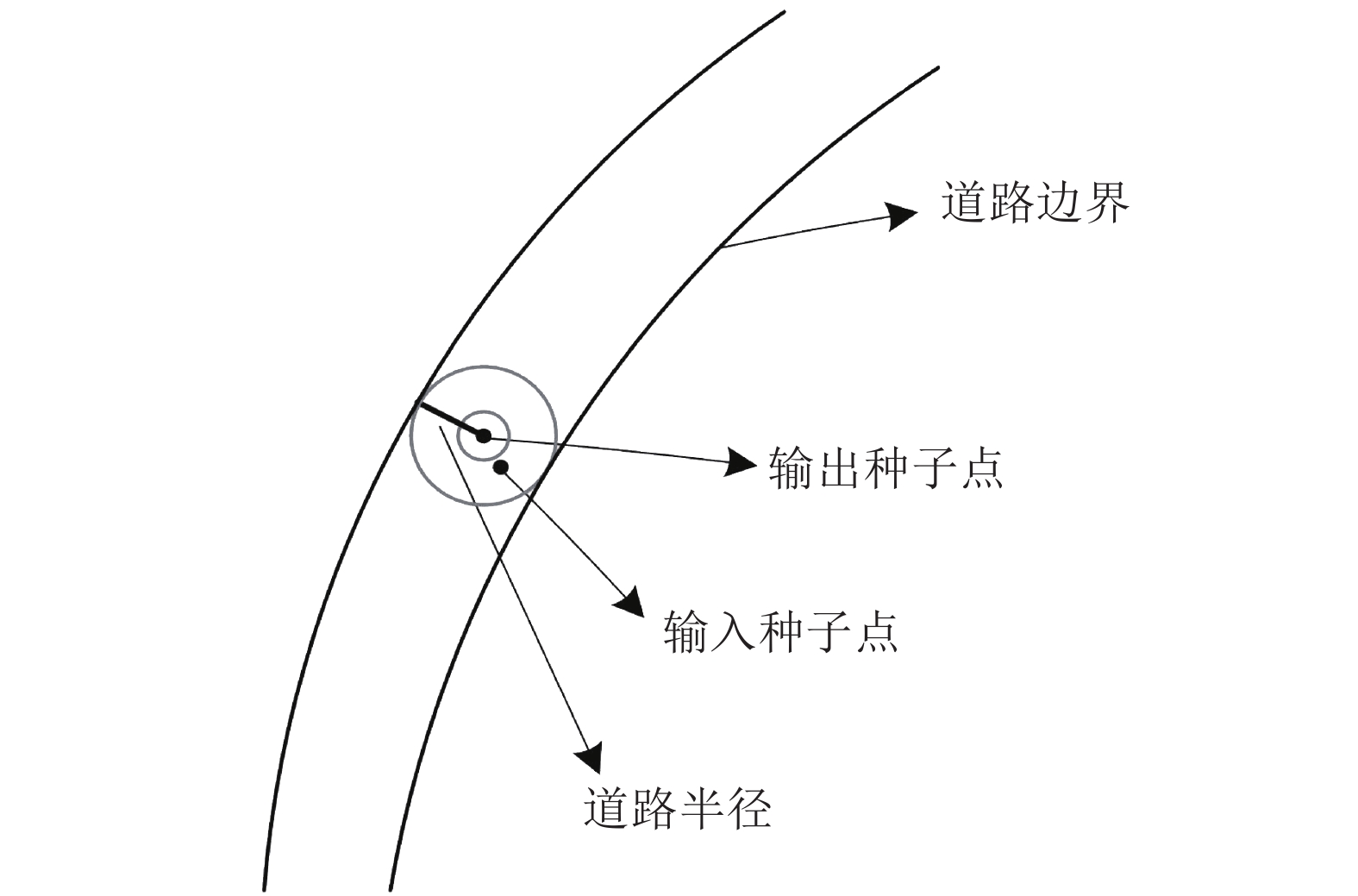
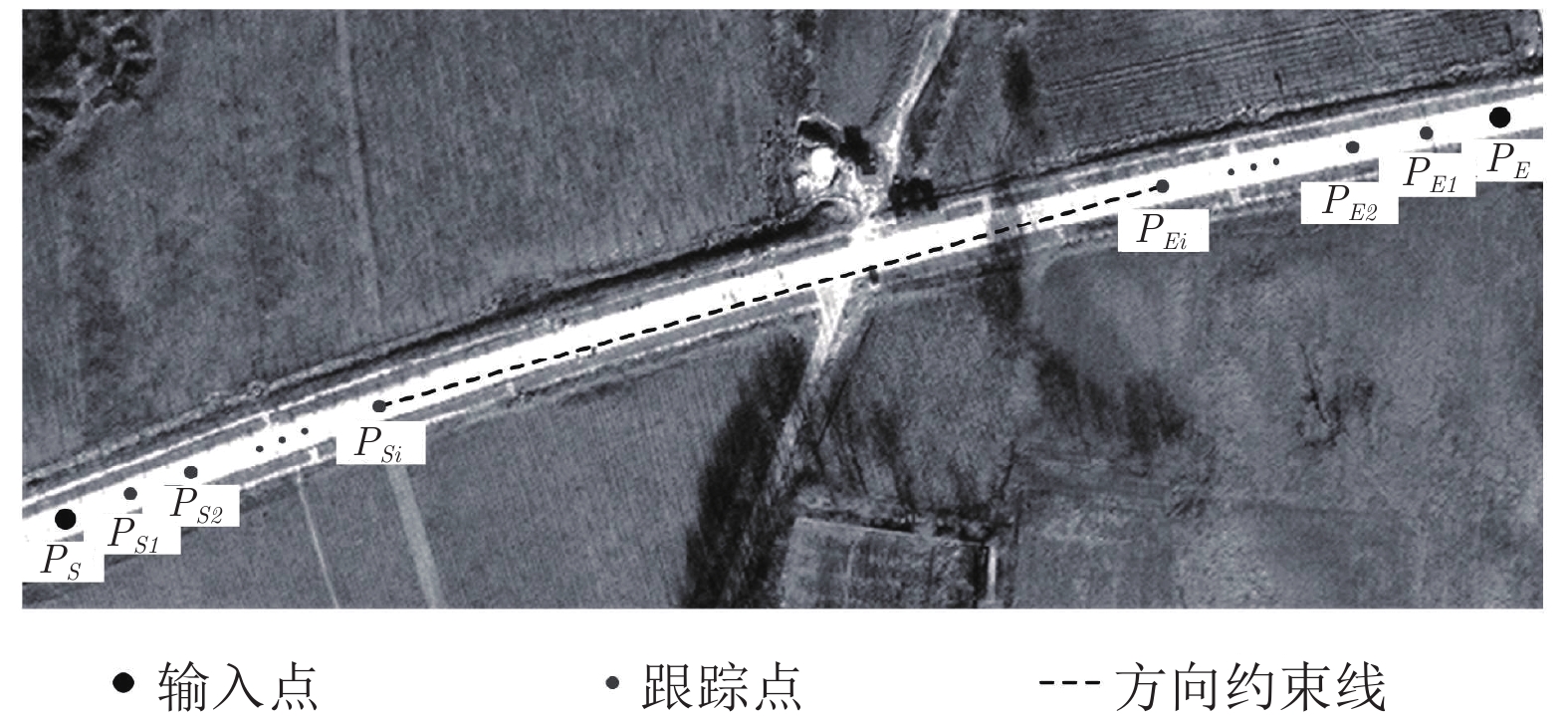
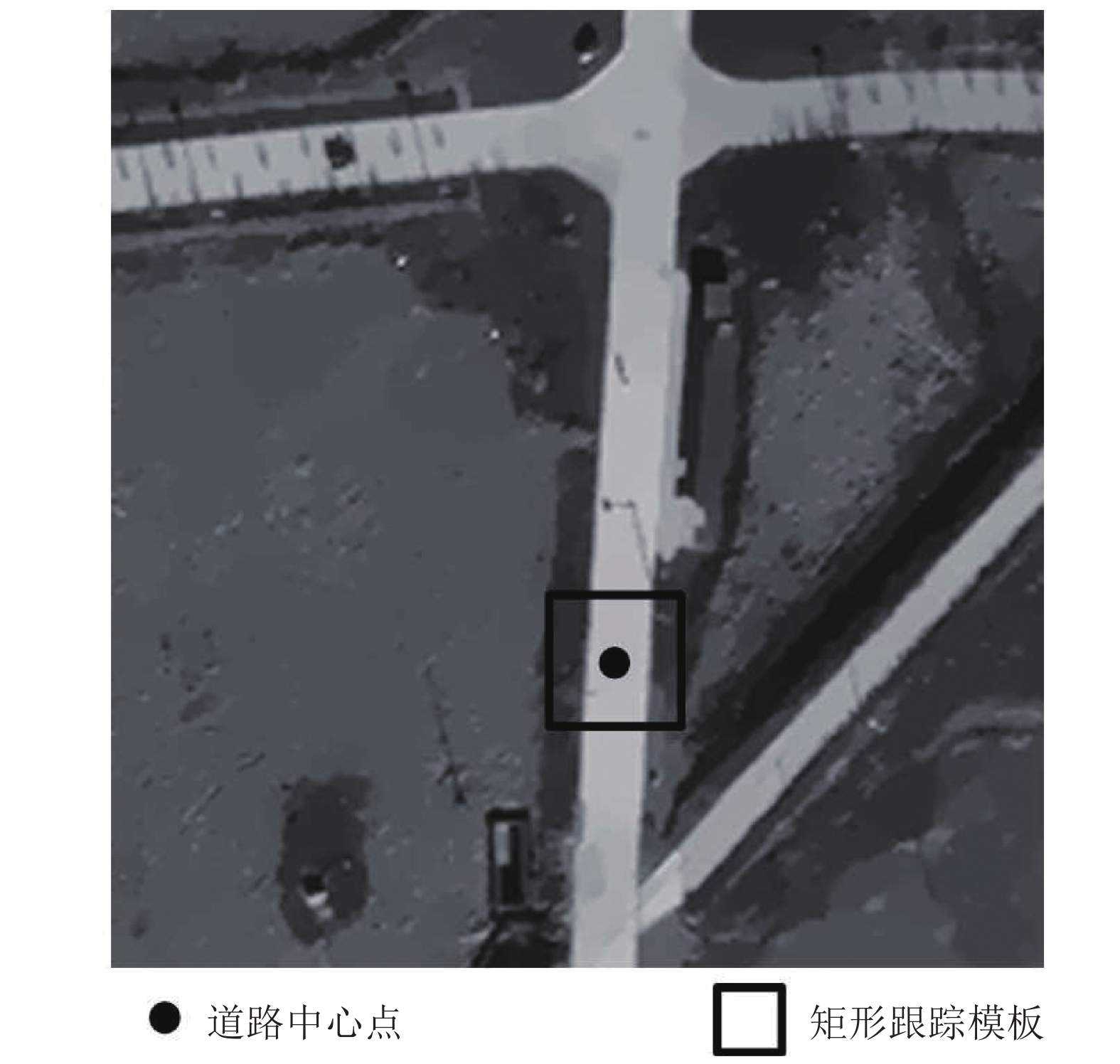
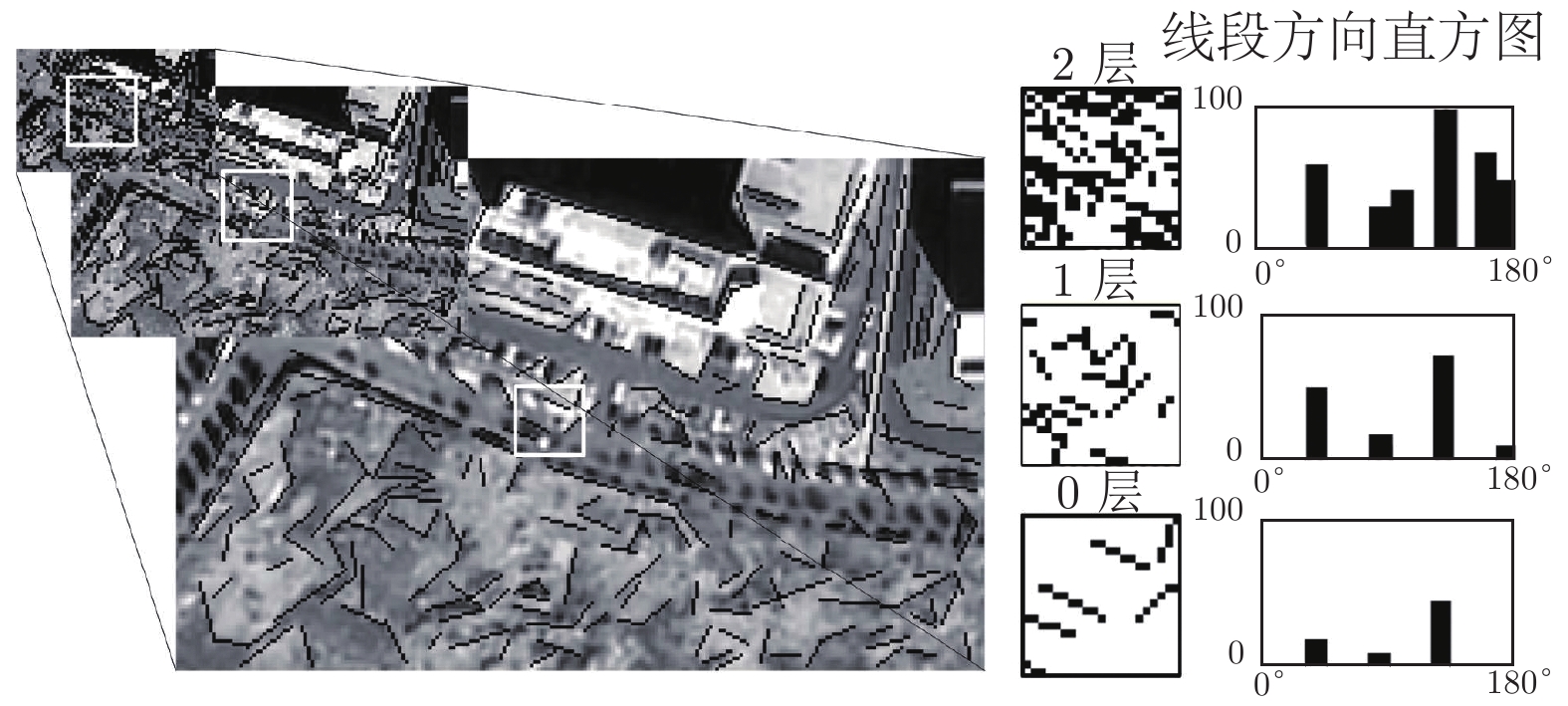
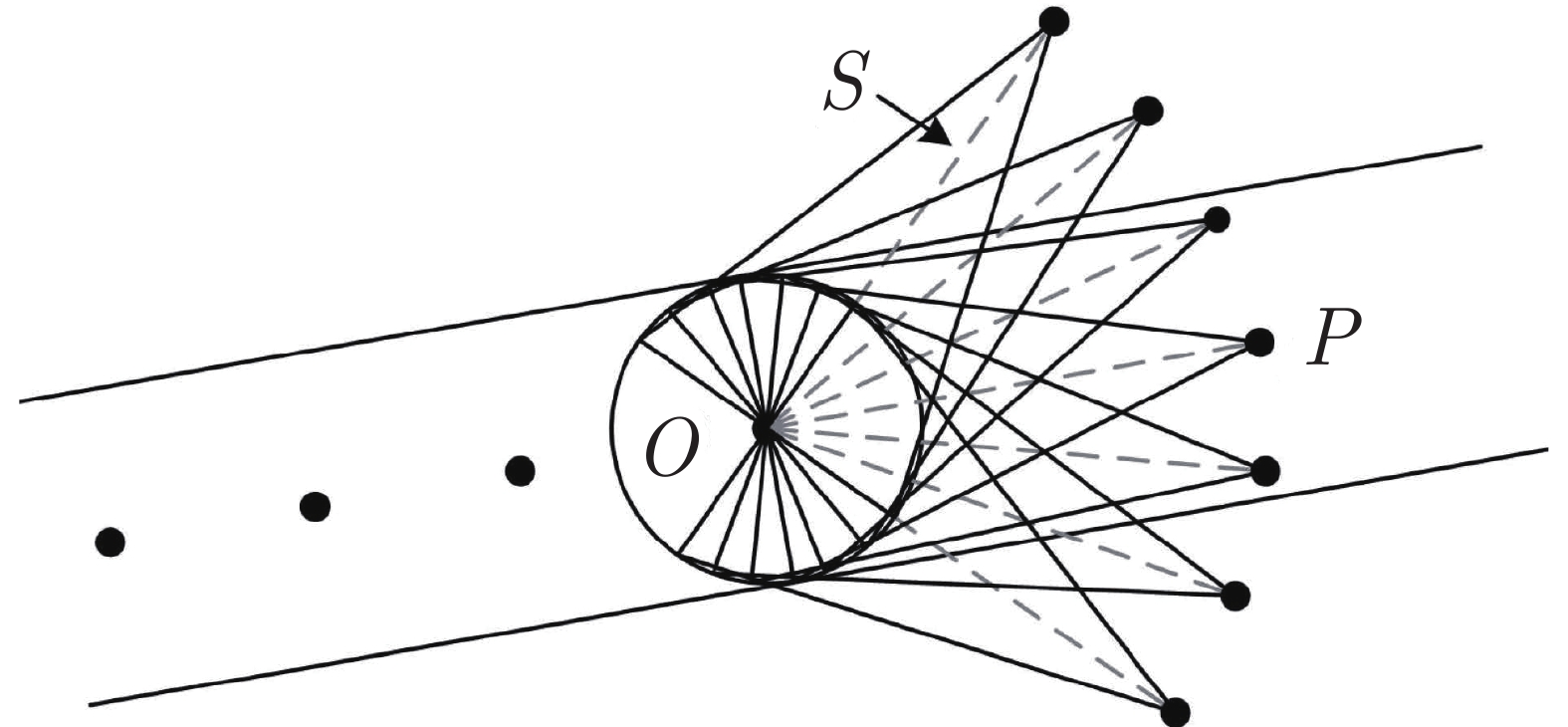
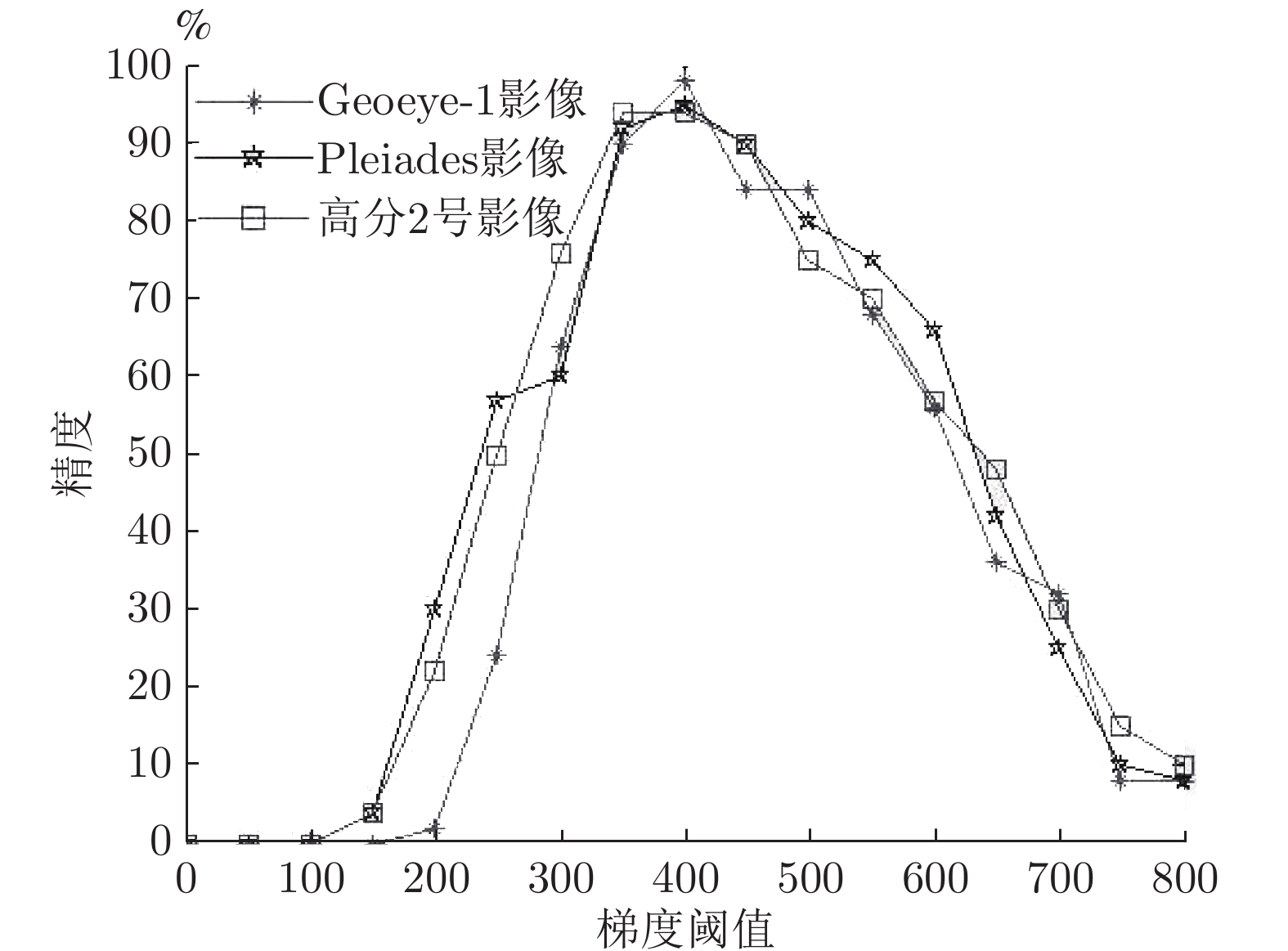
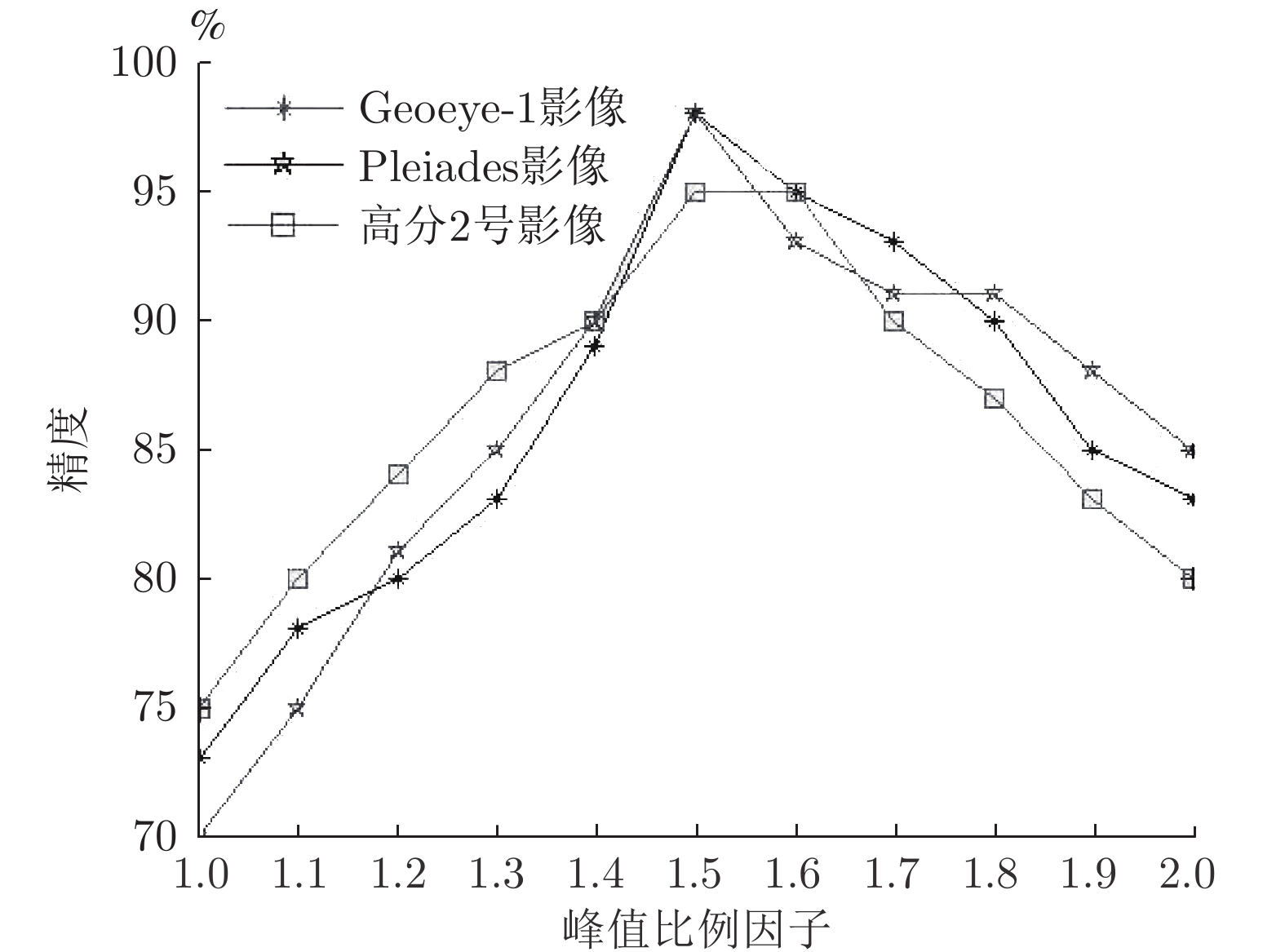
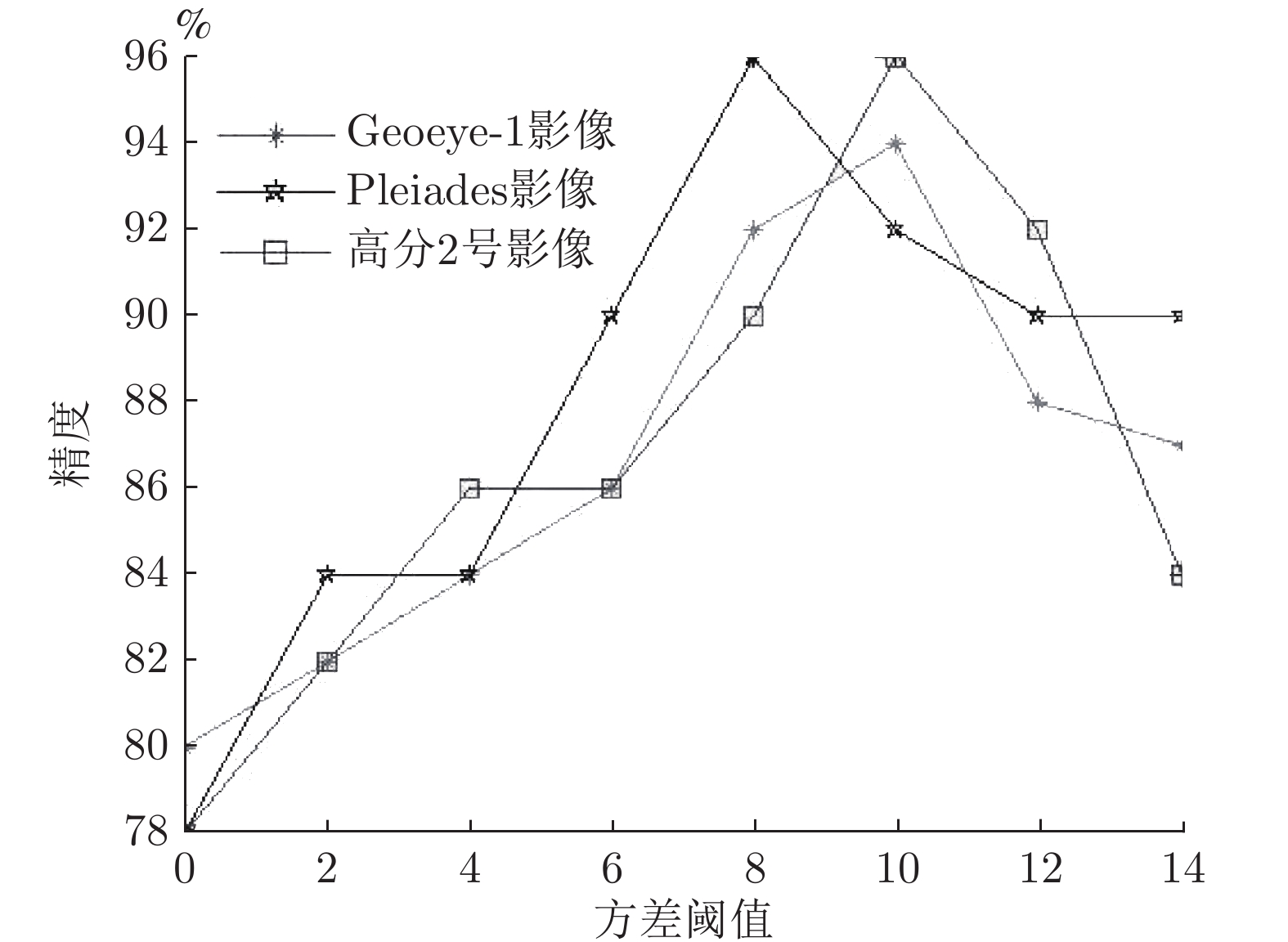
针对空间异质性导致的道路几何纹理特征突出性下降问题, 提出一种高分辨率遥感影像道路提取方法. 首先设定跟踪模型, 依据人工输入点, 自适应提取道路中心点和道路宽度, 设计迭代内插、双向迭代两种跟踪方式以及矩形跟踪模板; 然后提出多描述子道路匹配模型, 针对道路几何纹理特征突出性不足问题, 基于道路区域地物边缘与道路方向一致的语义关系, 通过线段峰值约束的思想, 提出一种多尺度线段方向直方图(Multi-scale line segment orientation histogram, MSLSOH)描述子, 以此对跟踪方向进行预测; 针对道路几何纹理特征均质性下降问题, 从道路区域与道路非道路混合区域纹理差异性出发, 组合三角形构成扇形描述子, 突出道路影像纹理特征, 以此不仅可对预测跟踪点进行验证, 而且也可在结构信息缺失的情况下对道路进行跟踪; 最后选取不同类型、不同分辨率、不同场景的高分辨率遥感影像, 通过与其他方法的实验对比, 表明该方法能够解决道路提取过程中几何纹理特征突出性下降问题, 具有准确率高和自动化程度高的优势.
针对空间异质性导致的道路几何纹理特征突出性下降问题, 提出一种高分辨率遥感影像道路提取方法. 首先设定跟踪模型, 依据人工输入点, 自适应提取道路中心点和道路宽度, 设计迭代内插、双向迭代两种跟踪方式以及矩形跟踪模板; 然后提出多描述子道路匹配模型, 针对道路几何纹理特征突出性不足问题, 基于道路区域地物边缘与道路方向一致的语义关系, 通过线段峰值约束的思想, 提出一种多尺度线段方向直方图(Multi-scale line segment orientation histogram, MSLSOH)描述子, 以此对跟踪方向进行预测; 针对道路几何纹理特征均质性下降问题, 从道路区域与道路非道路混合区域纹理差异性出发, 组合三角形构成扇形描述子, 突出道路影像纹理特征, 以此不仅可对预测跟踪点进行验证, 而且也可在结构信息缺失的情况下对道路进行跟踪; 最后选取不同类型、不同分辨率、不同场景的高分辨率遥感影像, 通过与其他方法的实验对比, 表明该方法能够解决道路提取过程中几何纹理特征突出性下降问题, 具有准确率高和自动化程度高的优势.




2020, 46(11): 2472-2478.
doi: 10.16383/j.aas.c180535
摘要:
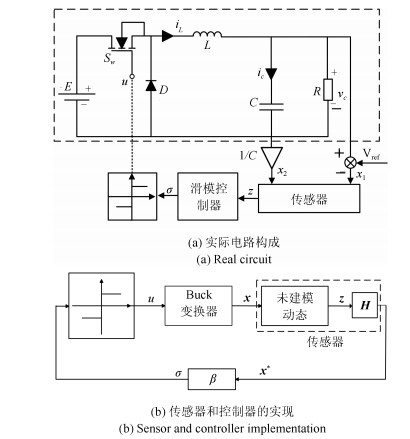
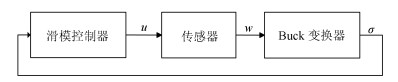
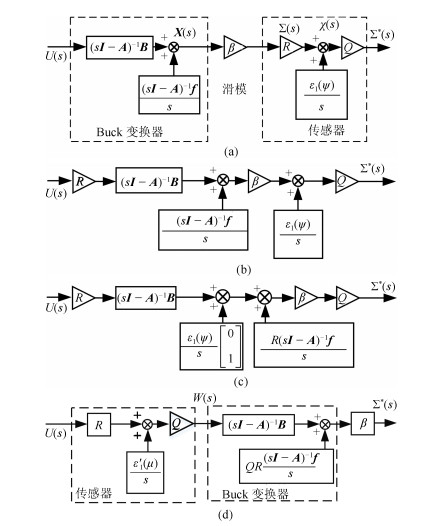
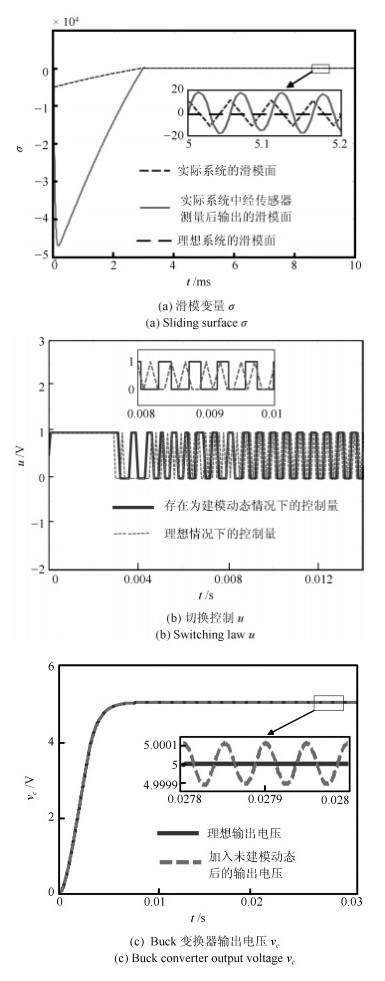
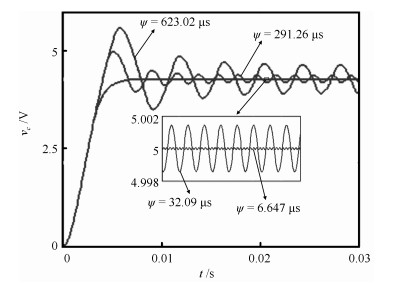
研究传感器未建模动态对Buck变换器滑模控制系统的性能影响, 提出一种基于奇异摄动理论的稳定性和输出电压谐波分析的新方法.给出滑模控制器的参数整定方法, 选取传感器的上升时间作为摄动时间, 建立其未建模动态的奇异摄动模型, 在多时间尺度框架下, 揭示传感器稳定输出与摄动时间的影响关系.在此基础上, 构造一个类Lyapunov函数分析未建模动态对整个闭环控制系统的稳定性影响, 证明未建模动态诱发谐波的必然性.针对输出电压的谐波, 在频域内利用描述函数法推导出未建模动态摄动时间与其谐波幅值和频率的数学影响关系.仿真结果验证所提方法的正确性和有效性.
研究传感器未建模动态对Buck变换器滑模控制系统的性能影响, 提出一种基于奇异摄动理论的稳定性和输出电压谐波分析的新方法.给出滑模控制器的参数整定方法, 选取传感器的上升时间作为摄动时间, 建立其未建模动态的奇异摄动模型, 在多时间尺度框架下, 揭示传感器稳定输出与摄动时间的影响关系.在此基础上, 构造一个类Lyapunov函数分析未建模动态对整个闭环控制系统的稳定性影响, 证明未建模动态诱发谐波的必然性.针对输出电压的谐波, 在频域内利用描述函数法推导出未建模动态摄动时间与其谐波幅值和频率的数学影响关系.仿真结果验证所提方法的正确性和有效性.