2018年 第44卷 第12期
2018, 44(12): 2113-2141.
doi: 10.16383/j.aas.2018.c170572
摘要:
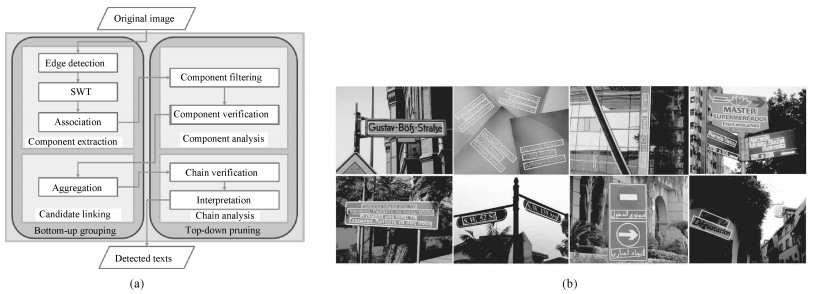
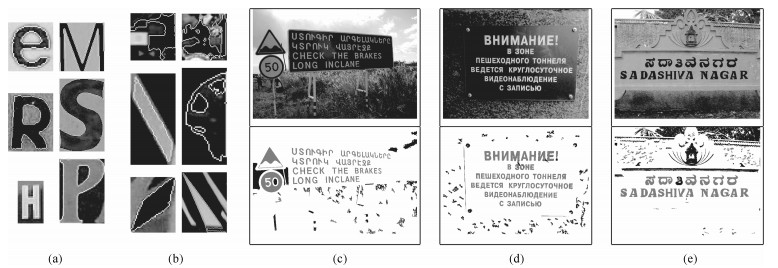
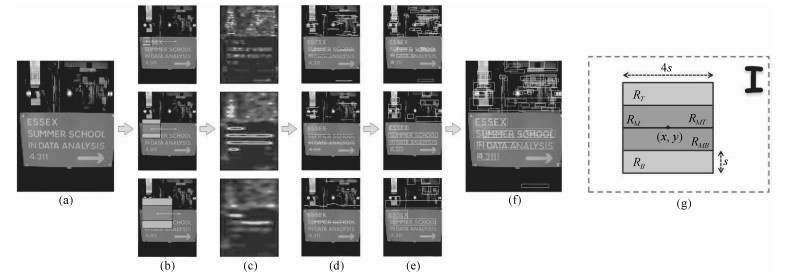
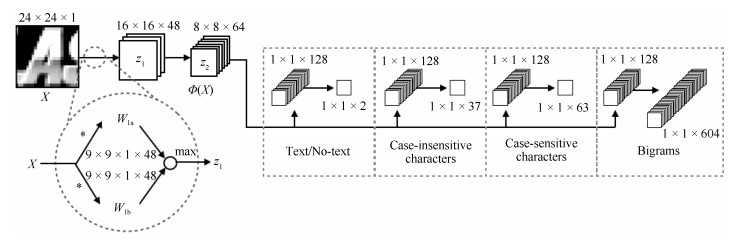
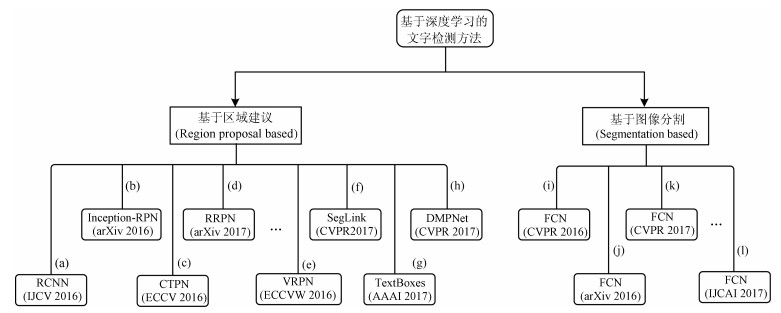
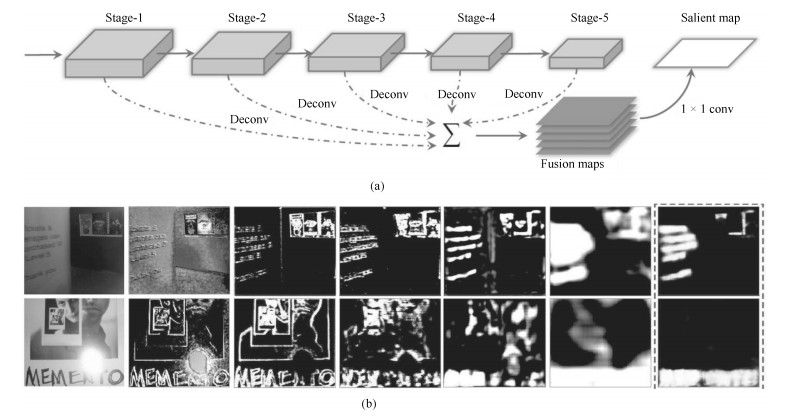
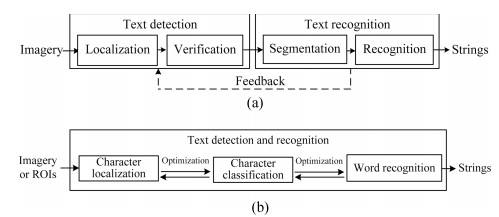
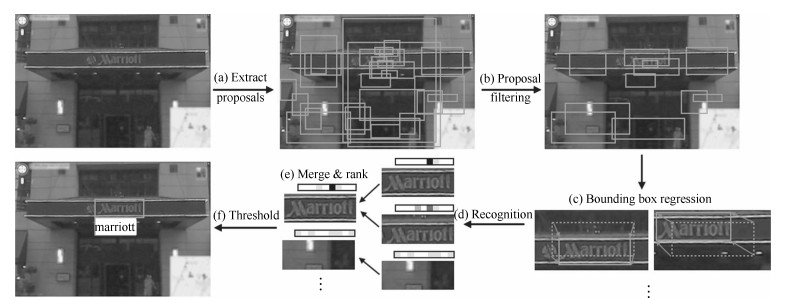
本文对自然场景文本检测问题及其方法的研究进展进行了综述.首先,论述了自然场景文本的特点、自然场景文本检测技术的研究背景、现状以及主要技术路线.其次,从传统文本检测以及深度学习文本检测的视角出发,梳理、分析并比较了各类自然场景文本检测方法的优缺点,并介绍了端对端文本识别技术.再次,论述了自然场景文本检测技术所面临的挑战,探讨了相应的解决方案.最后,本文列举了测试基准数据集、评估方法,将最具代表性的自然场景文本检测方法的性能进行了比较,本文还展望了本领域的发展趋势.
本文对自然场景文本检测问题及其方法的研究进展进行了综述.首先,论述了自然场景文本的特点、自然场景文本检测技术的研究背景、现状以及主要技术路线.其次,从传统文本检测以及深度学习文本检测的视角出发,梳理、分析并比较了各类自然场景文本检测方法的优缺点,并介绍了端对端文本识别技术.再次,论述了自然场景文本检测技术所面临的挑战,探讨了相应的解决方案.最后,本文列举了测试基准数据集、评估方法,将最具代表性的自然场景文本检测方法的性能进行了比较,本文还展望了本领域的发展趋势.





2018, 44(12): 2142-2159.
doi: 10.16383/j.aas.2018.c170644
摘要:
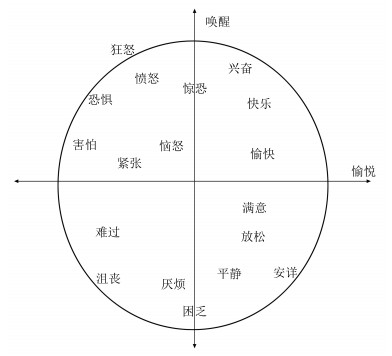
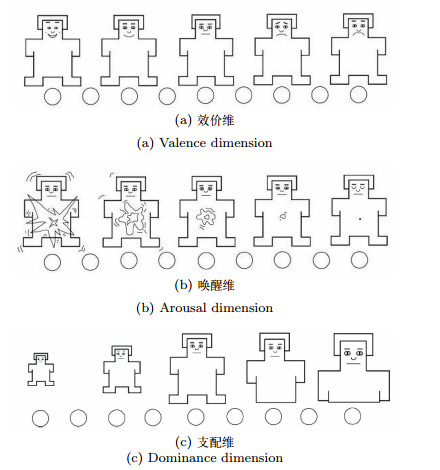
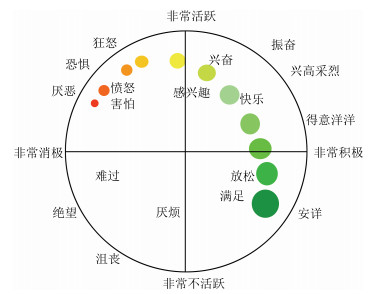
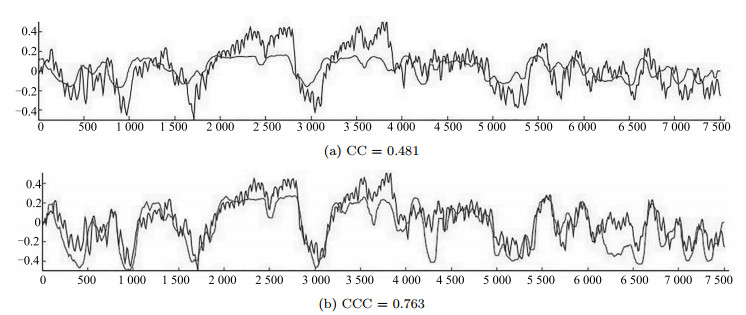
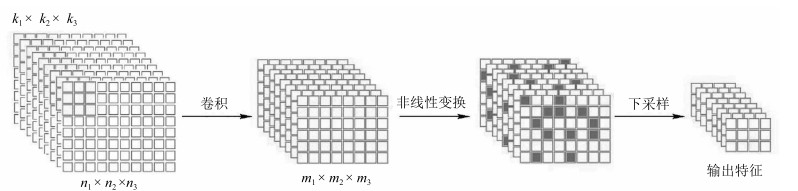
维度情感模型通过几个取值连续的维度(如唤醒维、效价维、支配维等)将情感刻画为一个多维信号.与传统的离散情感模型相比,具有表示情感的范围广、能描述情感的演变过程等优点,近年来受到越来越多情感识别研究者的关注.多模态维度情感预测是一项复杂的工程,预测性能受所使用的模态、每个模态的特征提取、信息融合技术、标注人员的标注误差等多方面影响.为了提高多模态维度情感预测的性能,研究者在各个方面都做出了不懈努力.本文综述了维度情感的概念、标注,维度情感预测的性能评价指标以及多模态维度情感预测的研究现状,对比和分析了各种因素对多模态维度情感预测性能的影响,并总结出多模态维度情感预测面临的挑战及发展趋势.
维度情感模型通过几个取值连续的维度(如唤醒维、效价维、支配维等)将情感刻画为一个多维信号.与传统的离散情感模型相比,具有表示情感的范围广、能描述情感的演变过程等优点,近年来受到越来越多情感识别研究者的关注.多模态维度情感预测是一项复杂的工程,预测性能受所使用的模态、每个模态的特征提取、信息融合技术、标注人员的标注误差等多方面影响.为了提高多模态维度情感预测的性能,研究者在各个方面都做出了不懈努力.本文综述了维度情感的概念、标注,维度情感预测的性能评价指标以及多模态维度情感预测的研究现状,对比和分析了各种因素对多模态维度情感预测性能的影响,并总结出多模态维度情感预测面临的挑战及发展趋势.



2018, 44(12): 2160-2169.
doi: 10.16383/j.aas.2018.c160636
摘要:
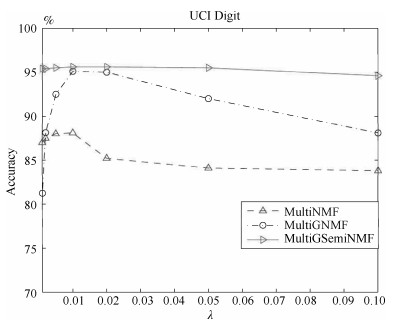
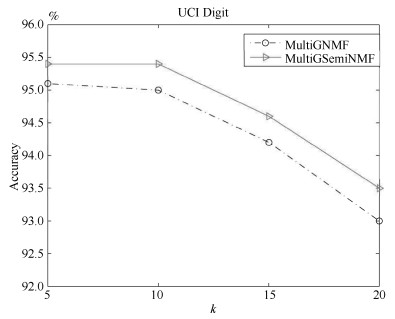
在计算机视觉和模式识别领域,随着多源信息越来越多,图像的描述方法也越来越丰富,多视图学习方法能更充分利用这种多源信息,进而提高聚类的准确率.因此,本文提出了两种基于多视图学习的方法:MultiGNMF和MultiGSemiNMF方法.该方法是在矩阵分解的基础之上,结合以往多视图学习的框架准则,并利用了样本的局部结构形成的.MultiGNMF和MultiGSemiNMF算法不仅能学习视图间的互补信息,同时能保持样本的空间结构.但是,MultiGNMF算法只适用于非负的特征矩阵.因此,考虑到SemiNMF算法相对于NMF算法具有更大的扩展性,结合多视图学习的框架,本文又提出了多视图学习的MultiGSemiNMF算法.实验结果证实了这两种方法有较好的性能.
在计算机视觉和模式识别领域,随着多源信息越来越多,图像的描述方法也越来越丰富,多视图学习方法能更充分利用这种多源信息,进而提高聚类的准确率.因此,本文提出了两种基于多视图学习的方法:MultiGNMF和MultiGSemiNMF方法.该方法是在矩阵分解的基础之上,结合以往多视图学习的框架准则,并利用了样本的局部结构形成的.MultiGNMF和MultiGSemiNMF算法不仅能学习视图间的互补信息,同时能保持样本的空间结构.但是,MultiGNMF算法只适用于非负的特征矩阵.因此,考虑到SemiNMF算法相对于NMF算法具有更大的扩展性,结合多视图学习的框架,本文又提出了多视图学习的MultiGSemiNMF算法.实验结果证实了这两种方法有较好的性能.

2018, 44(12): 2170-2178.
doi: 10.16383/j.aas.2018.c170146
摘要:
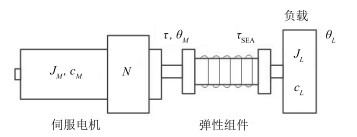
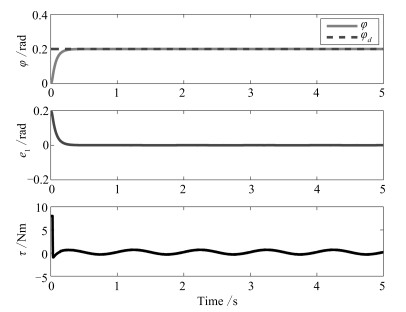
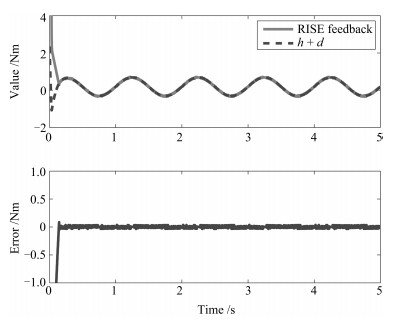
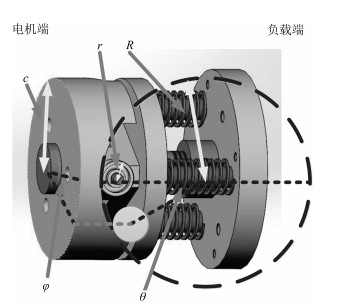
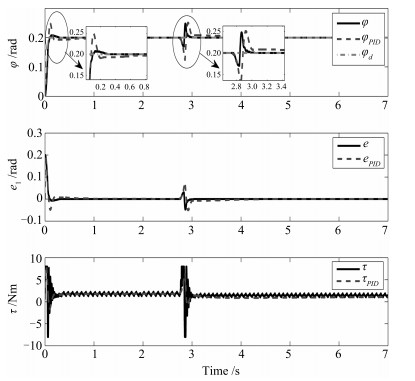
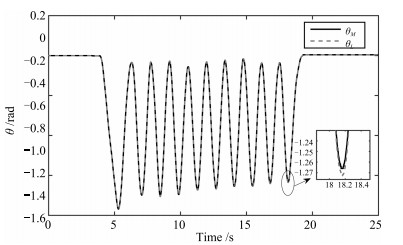
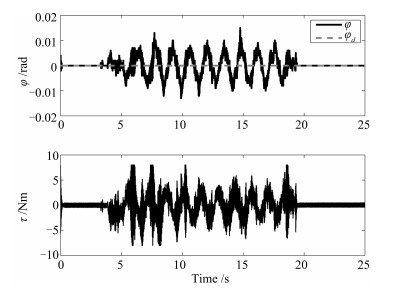
串联弹性驱动器(Series elastic actuator,SEA)是机器人交互系统中的一种理想力源.本文针对非线性SEA的力矩控制问题提出一种基于RISE(Robust integral of the sign of the error)反馈的最优控制方法,能够克服模型参数不确定和有界扰动,实现SEA输出力矩在交互过程中快速平稳地收敛到期望值.具体来说,首先对SEA的模型进行分析和变换;然后假设模型参数和扰动均已知,并在此基础上基于二次型指标设计最优控制律;之后基于RISE反馈重新设计控制律抵消模型参数不确定性和有界扰动,基于Lyapunov理论分析控制器的收敛性和信号的有界性,实验结果表明这种基于RISE反馈的最优控制方法具有良好的控制性能和对有界扰动的鲁棒性.
串联弹性驱动器(Series elastic actuator,SEA)是机器人交互系统中的一种理想力源.本文针对非线性SEA的力矩控制问题提出一种基于RISE(Robust integral of the sign of the error)反馈的最优控制方法,能够克服模型参数不确定和有界扰动,实现SEA输出力矩在交互过程中快速平稳地收敛到期望值.具体来说,首先对SEA的模型进行分析和变换;然后假设模型参数和扰动均已知,并在此基础上基于二次型指标设计最优控制律;之后基于RISE反馈重新设计控制律抵消模型参数不确定性和有界扰动,基于Lyapunov理论分析控制器的收敛性和信号的有界性,实验结果表明这种基于RISE反馈的最优控制方法具有良好的控制性能和对有界扰动的鲁棒性.

2018, 44(12): 2179-2187.
doi: 10.16383/j.aas.2018.c170090
摘要:
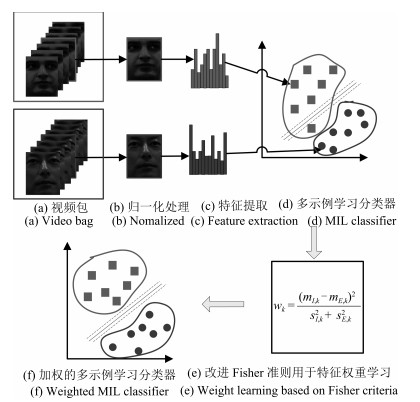
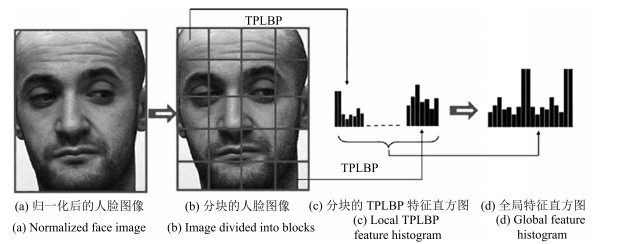
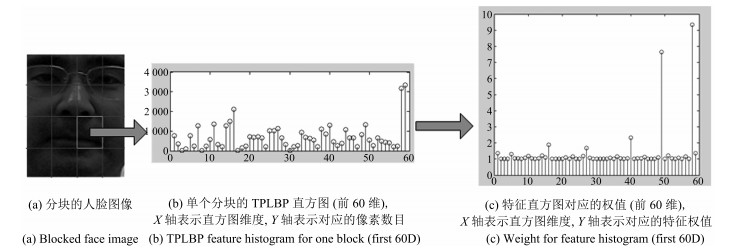
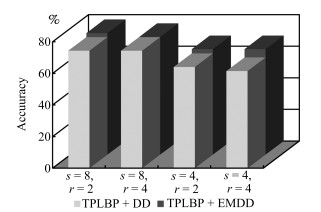
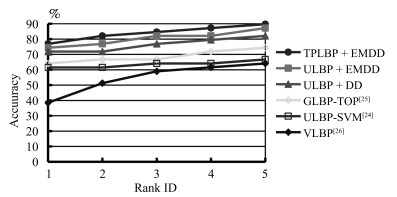
视频环境下目标的姿态变化使得人脸关键帧难以准确定位,导致基于关键帧标识的视频人脸识别方法的识别率偏低.为解决上述问题,本文提出一种基于Fisher加权准则的多示例学习视频人脸识别算法.该算法将视频人脸识别视为一个多示例问题,将视频中归一化后的人脸帧图像作为视频包中的示例,采用分块TPLBP级联直方图作为示例纹理特征,示例特征的权值通过改进的Fisher准则获得.在训练集合的示例特征空间中,采用多示例学习算法生成分类器,进而实现对测试视频的分类及预测.通过在Honda/UCSD视频库和Youtube Face数据库中的相关实验,该算法达到了较高的识别精度,从而验证了算法的有效性.同时,该方法对均匀光照变化、姿态变化等具有良好的鲁棒性.
视频环境下目标的姿态变化使得人脸关键帧难以准确定位,导致基于关键帧标识的视频人脸识别方法的识别率偏低.为解决上述问题,本文提出一种基于Fisher加权准则的多示例学习视频人脸识别算法.该算法将视频人脸识别视为一个多示例问题,将视频中归一化后的人脸帧图像作为视频包中的示例,采用分块TPLBP级联直方图作为示例纹理特征,示例特征的权值通过改进的Fisher准则获得.在训练集合的示例特征空间中,采用多示例学习算法生成分类器,进而实现对测试视频的分类及预测.通过在Honda/UCSD视频库和Youtube Face数据库中的相关实验,该算法达到了较高的识别精度,从而验证了算法的有效性.同时,该方法对均匀光照变化、姿态变化等具有良好的鲁棒性.

2018, 44(12): 2188-2197.
doi: 10.16383/j.aas.2018.c170300
摘要:
本文针对一类具有执行器故障的多输入多输出(Multi-input multi-output,MIMO)不确定连续仿射非线性系统,提出了一种最优自适应输出跟踪控制方案.设计了保证系统稳定性的不确定项估计神经网络权值调整算法,仅采用评价网络即可同时获得无限时域代价函数和满足哈密顿-雅可比-贝尔曼(Hamilton-Jacobi-Bellman,HJB)方程的最优控制输入.考虑执行器卡死和部分失效故障,设计最优自适应补偿控制律,所设计的控制律可以实现对参考输出的一致最终有界跟踪.飞行器控制仿真和对比验证表明了本文方法的有效性和优越性.
本文针对一类具有执行器故障的多输入多输出(Multi-input multi-output,MIMO)不确定连续仿射非线性系统,提出了一种最优自适应输出跟踪控制方案.设计了保证系统稳定性的不确定项估计神经网络权值调整算法,仅采用评价网络即可同时获得无限时域代价函数和满足哈密顿-雅可比-贝尔曼(Hamilton-Jacobi-Bellman,HJB)方程的最优控制输入.考虑执行器卡死和部分失效故障,设计最优自适应补偿控制律,所设计的控制律可以实现对参考输出的一致最终有界跟踪.飞行器控制仿真和对比验证表明了本文方法的有效性和优越性.




2018, 44(12): 2198-2209.
doi: 10.16383/j.aas.2018.c170257
摘要:
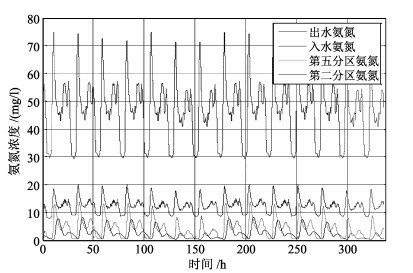
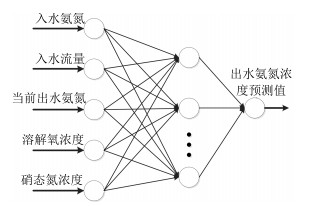
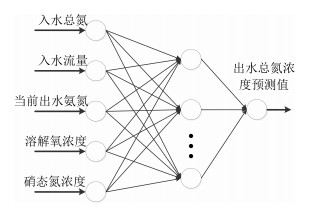
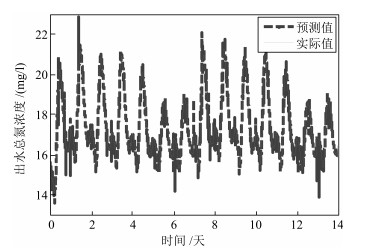
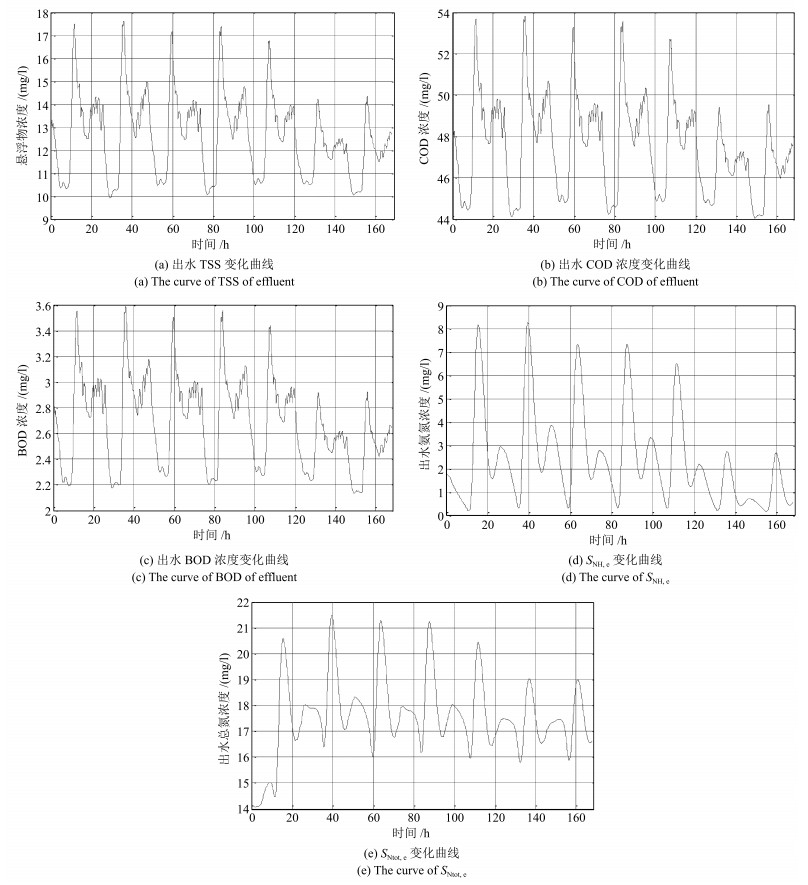
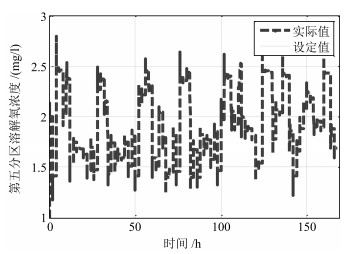
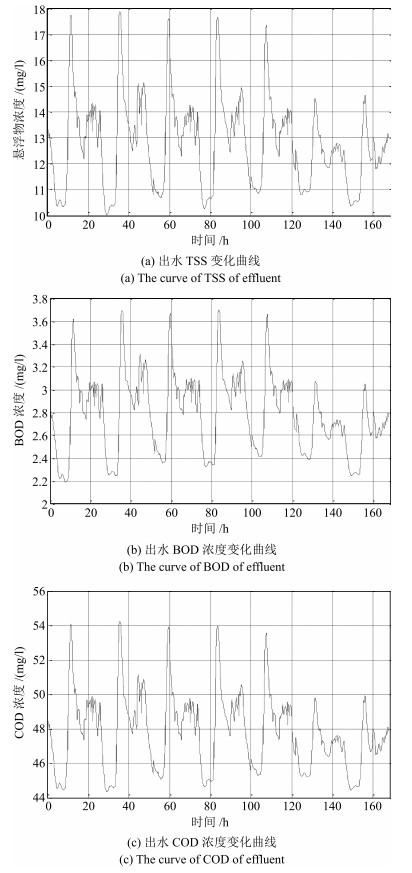
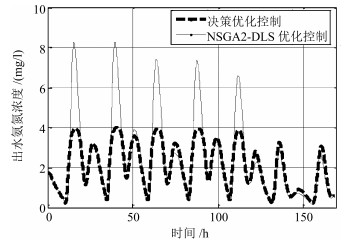
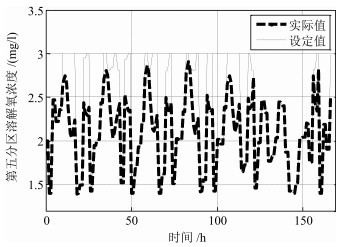
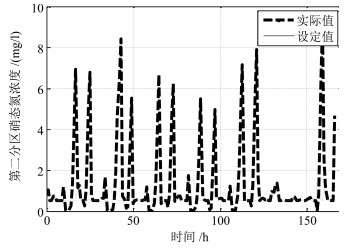
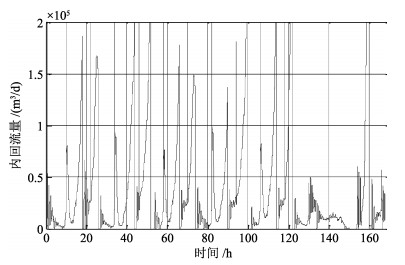
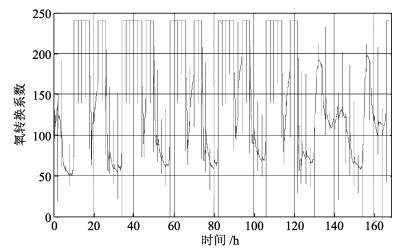
以抑制出水氨氮浓度、总氮浓度峰值和降低能耗为目标,提出污水处理决策优化控制方法.首先利用神经网络建立出水氨氮和总氮预测模型;其次使用多目标进化算法得到溶解氧浓度和硝态氮浓度设定值;最后,根据出水氨氮和总氮浓度预测结果选择控制策略(优化控制和抑制控制).以仿真基准模型(BSM1)为平台,采用提出的决策优化控制方法进行控制,实验结果表明,该控制方法有效抑制了出水氨氮和总氮浓度峰值,出水超标时间和能耗明显少于所对比决策控制方法.
以抑制出水氨氮浓度、总氮浓度峰值和降低能耗为目标,提出污水处理决策优化控制方法.首先利用神经网络建立出水氨氮和总氮预测模型;其次使用多目标进化算法得到溶解氧浓度和硝态氮浓度设定值;最后,根据出水氨氮和总氮浓度预测结果选择控制策略(优化控制和抑制控制).以仿真基准模型(BSM1)为平台,采用提出的决策优化控制方法进行控制,实验结果表明,该控制方法有效抑制了出水氨氮和总氮浓度峰值,出水超标时间和能耗明显少于所对比决策控制方法.




2018, 44(12): 2210-2221.
doi: 10.16383/j.aas.2018.c170142
摘要:
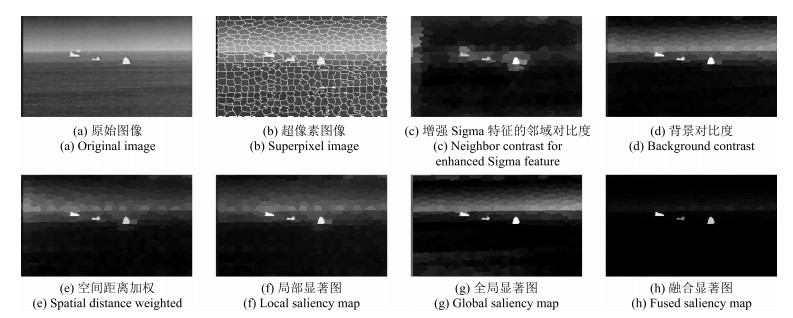
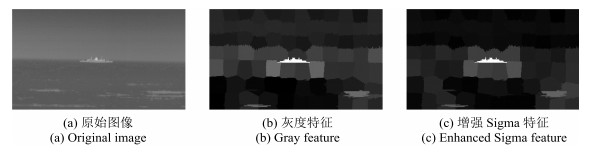
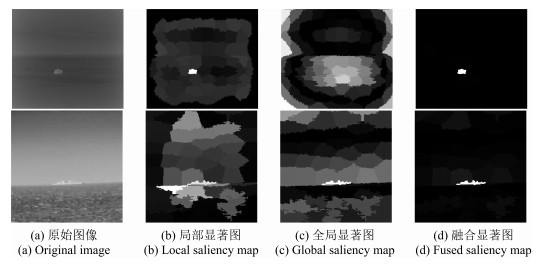
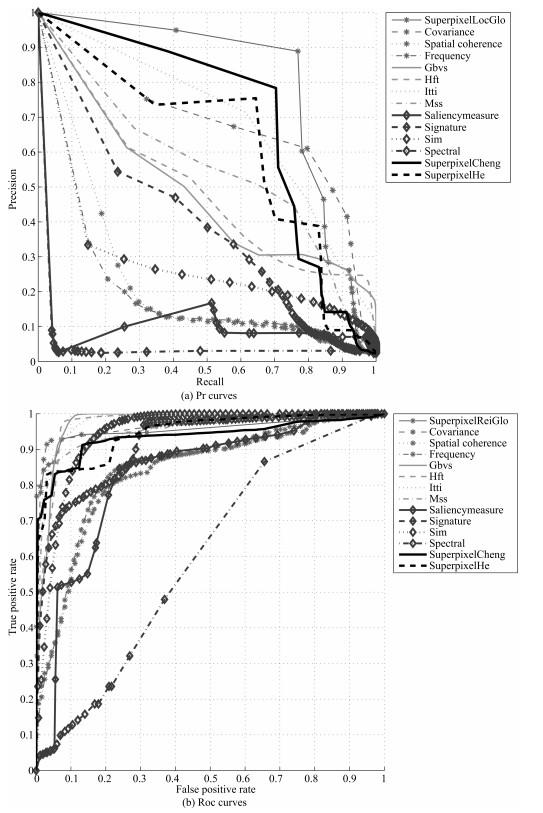
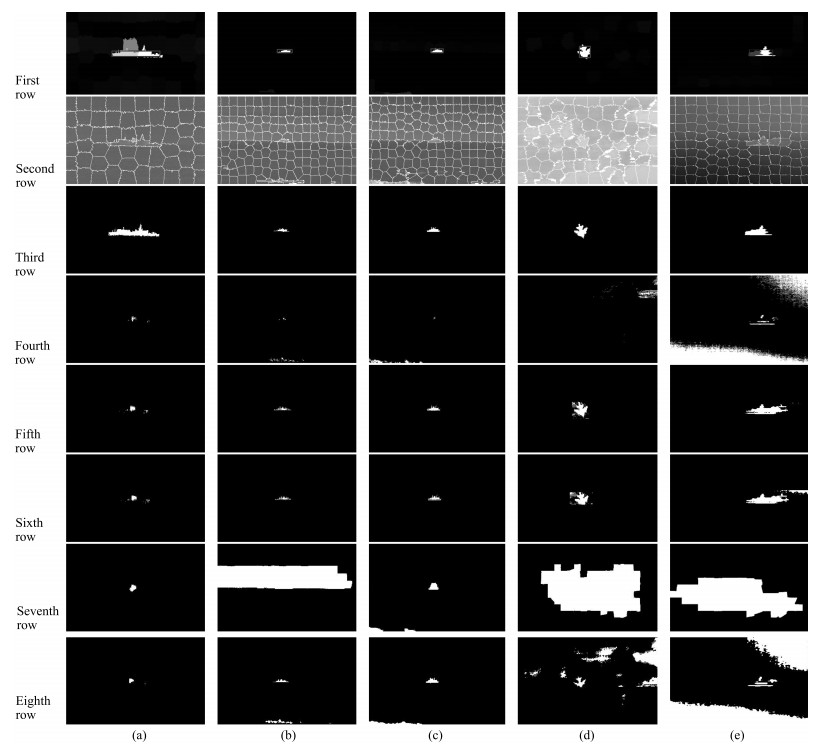
为了快速精确地分割红外图像目标,提出一种基于融合显著图和高效子窗口搜索的红外目标分割方法.在获取图像超像素的基础上,提取每个区域增强的Sigma特征,并考虑邻域对比度、背景对比度、空间距离和区域大小的影响,构建局部显著图,接着利用全局核密度估计构建全局显著图,然后融合局部和全局显著图实现图像显著性检测,最后应用高效子窗口搜索方法检测和筛选目标,实现红外目标分割.实验结果表明,新方法的显著图结果目标区域一致高亮且边缘清晰,背景杂波抑制效果好,可实现快速精确的目标分割.
为了快速精确地分割红外图像目标,提出一种基于融合显著图和高效子窗口搜索的红外目标分割方法.在获取图像超像素的基础上,提取每个区域增强的Sigma特征,并考虑邻域对比度、背景对比度、空间距离和区域大小的影响,构建局部显著图,接着利用全局核密度估计构建全局显著图,然后融合局部和全局显著图实现图像显著性检测,最后应用高效子窗口搜索方法检测和筛选目标,实现红外目标分割.实验结果表明,新方法的显著图结果目标区域一致高亮且边缘清晰,背景杂波抑制效果好,可实现快速精确的目标分割.


2018, 44(12): 2222-2227.
doi: 10.16383/j.aas.2018.c170084
摘要:
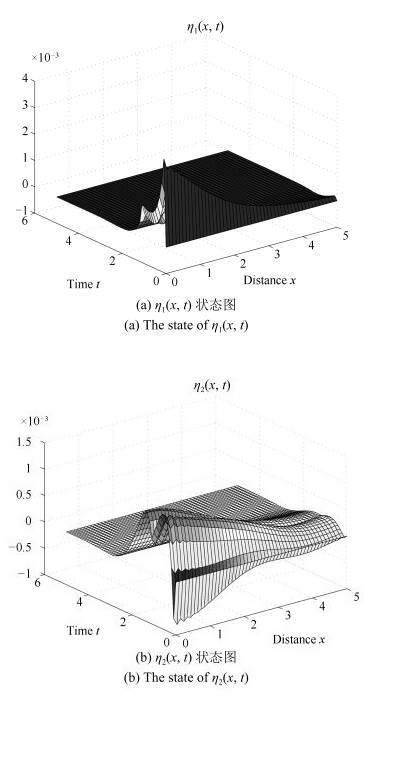
首先给出中和控制器设计思路,针对具有时滞特性的分布参数系统,设计中和控制器,讨论此类系统的稳定问题.利用Lyapunov稳定性理论并结合矩阵不等式处理方法,得出具有时滞特性分布参数系统稳定中和控制器存在的充分条件.最后结合所给条件,给出一个数值仿真说明其有效性.
首先给出中和控制器设计思路,针对具有时滞特性的分布参数系统,设计中和控制器,讨论此类系统的稳定问题.利用Lyapunov稳定性理论并结合矩阵不等式处理方法,得出具有时滞特性分布参数系统稳定中和控制器存在的充分条件.最后结合所给条件,给出一个数值仿真说明其有效性.

2018, 44(12): 2228-2237.
doi: 10.16383/j.aas.2018.c180078
摘要:
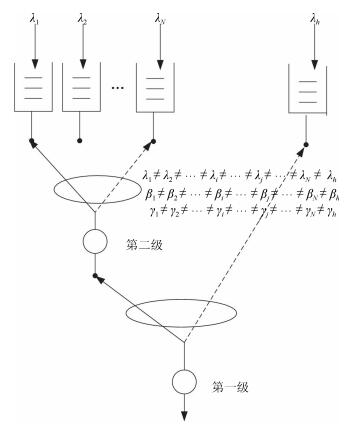
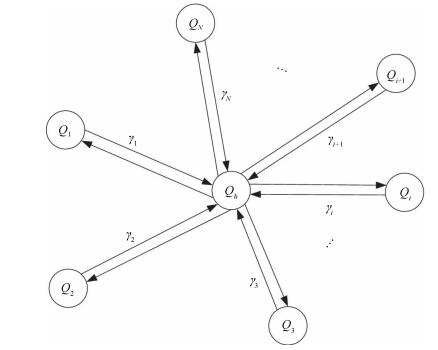
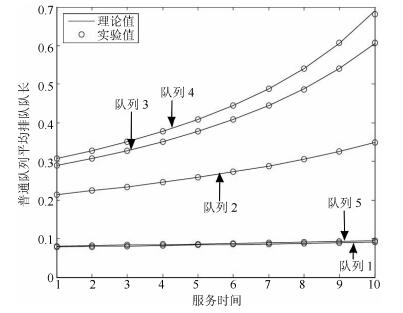
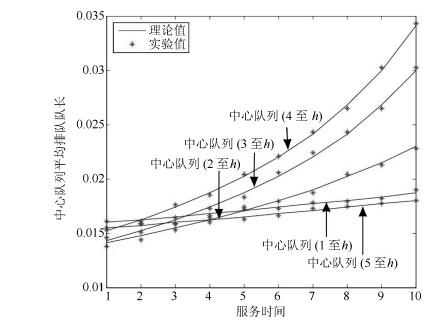
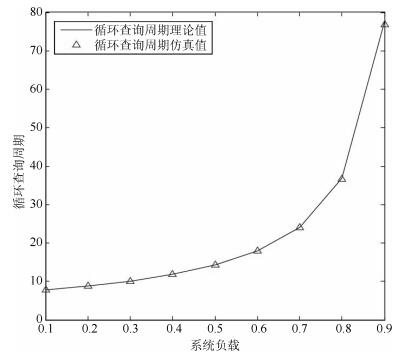
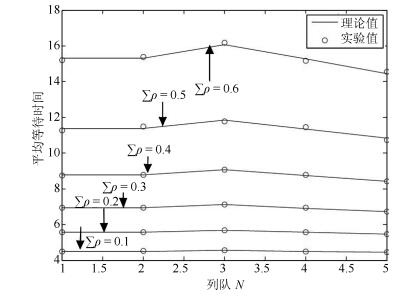
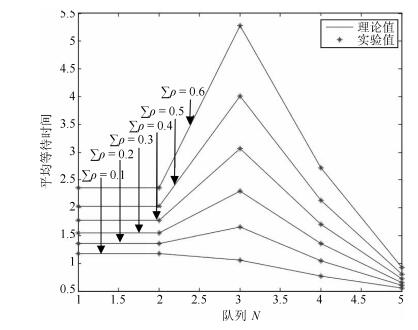
区分优先级的轮询服务一直是研究人员讨论并探索的热点,本文则是采用了对称性与非对称性相结合的区分优先级的两级轮询服务模型.系统依托并行方式的处理模式,既提高了轮询系统的利用率,也降低服务器在查询转换期间所耗费的时间.并且运用马尔科夫链和概率母函数的方法建立了轮询系统的数学模型,通过对数学模型的解析精确地给出了两级非对称服务系统平均排队队长及查询周期的表达式.同时,根据系统终端循环周期的二阶特性量近似相等的方法,针对两级非对称模型给出了一种平均等待时间的近似解析式.
区分优先级的轮询服务一直是研究人员讨论并探索的热点,本文则是采用了对称性与非对称性相结合的区分优先级的两级轮询服务模型.系统依托并行方式的处理模式,既提高了轮询系统的利用率,也降低服务器在查询转换期间所耗费的时间.并且运用马尔科夫链和概率母函数的方法建立了轮询系统的数学模型,通过对数学模型的解析精确地给出了两级非对称服务系统平均排队队长及查询周期的表达式.同时,根据系统终端循环周期的二阶特性量近似相等的方法,针对两级非对称模型给出了一种平均等待时间的近似解析式.


2018, 44(12): 2238-2249.
doi: 10.16383/j.aas.2018.c170265
摘要:
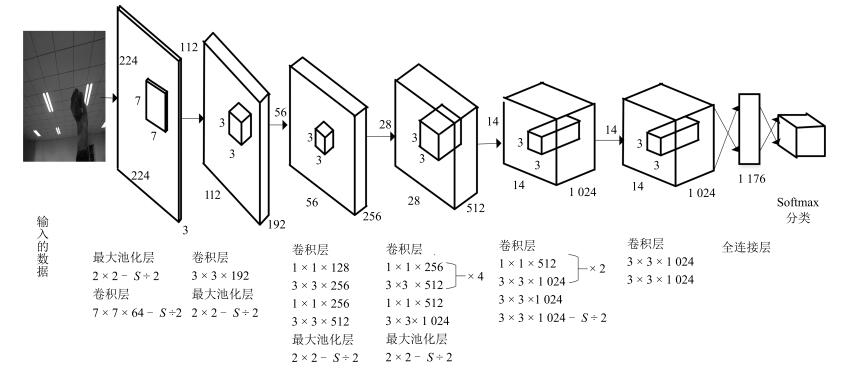
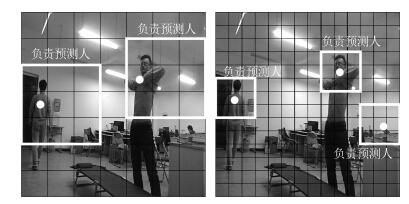
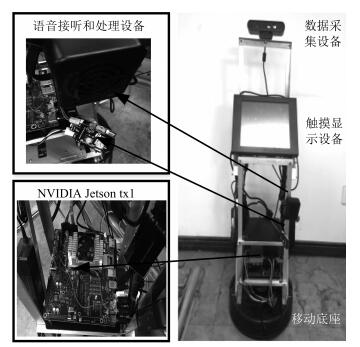
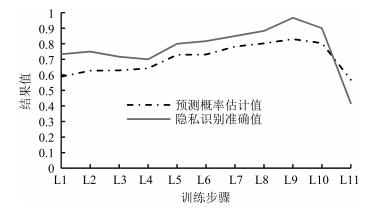
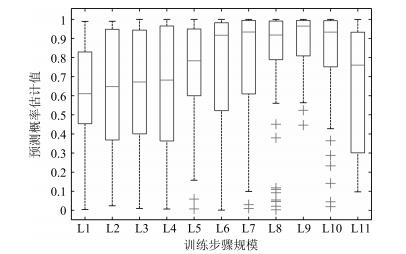
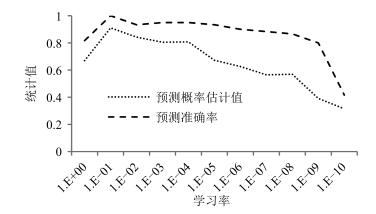
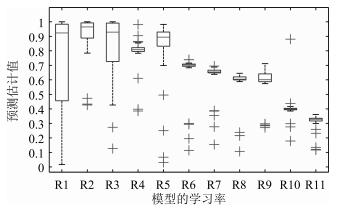
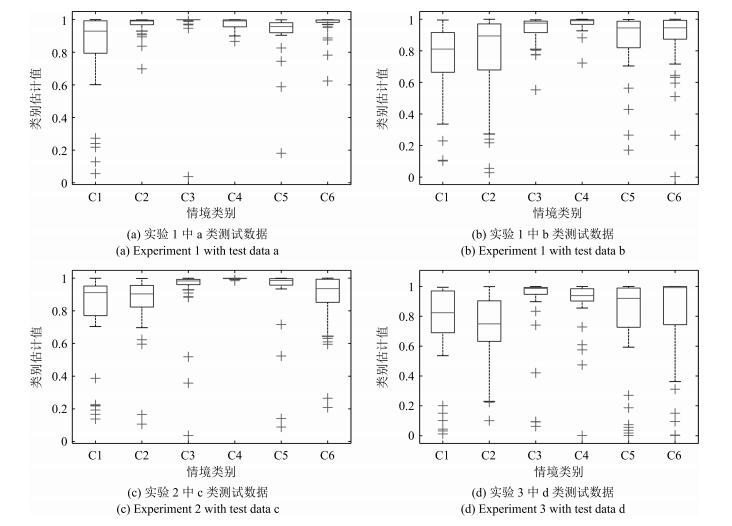
为了提高YOLO识别较小目标的能力,解决其在特征提取过程中的信息丢失问题,提出改进的YOLO特征提取算法.将目标检测方法DPM与R-FCN融入到YOLO中,设计一种改进的神经网络结构,包含一个全连接层以及先池化再卷积的特征提取模式以减少特征信息的丢失.然后,设计基于RPN的滑动窗口合并算法,进而形成基于改进YOLO的特征提取算法.搭建服务机器人情境检测平台,给出服务机器人情境检测的总体工作流程.设计家居环境下的六类情境,建立训练数据集、验证数据集和4类测试数据集.测试分析训练步骤与预测概率估计值、学习率与识别准确性之间的关系,找出了适合所提出算法的训练步骤与学习率的经验值.测试结果表明:所提出的算法隐私情境检测准确率为94.48%,有较强的识别鲁棒性.最后,与YOLO算法的比较结果表明,本文算法在识别准确率方面优于YOLO算法.
为了提高YOLO识别较小目标的能力,解决其在特征提取过程中的信息丢失问题,提出改进的YOLO特征提取算法.将目标检测方法DPM与R-FCN融入到YOLO中,设计一种改进的神经网络结构,包含一个全连接层以及先池化再卷积的特征提取模式以减少特征信息的丢失.然后,设计基于RPN的滑动窗口合并算法,进而形成基于改进YOLO的特征提取算法.搭建服务机器人情境检测平台,给出服务机器人情境检测的总体工作流程.设计家居环境下的六类情境,建立训练数据集、验证数据集和4类测试数据集.测试分析训练步骤与预测概率估计值、学习率与识别准确性之间的关系,找出了适合所提出算法的训练步骤与学习率的经验值.测试结果表明:所提出的算法隐私情境检测准确率为94.48%,有较强的识别鲁棒性.最后,与YOLO算法的比较结果表明,本文算法在识别准确率方面优于YOLO算法.


2018, 44(12): 2250-2258.
doi: 10.16383/j.aas.2018.c170421
摘要:
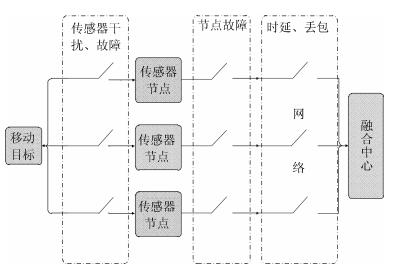
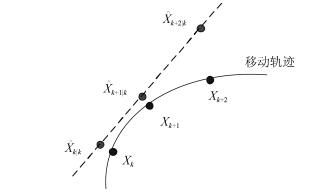
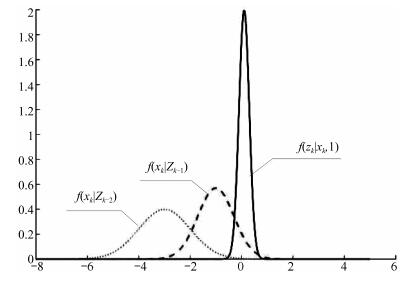
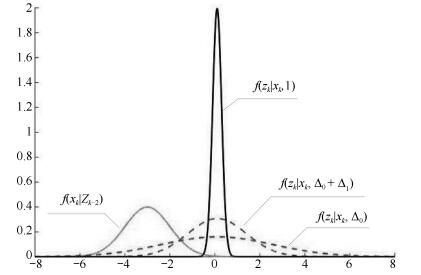
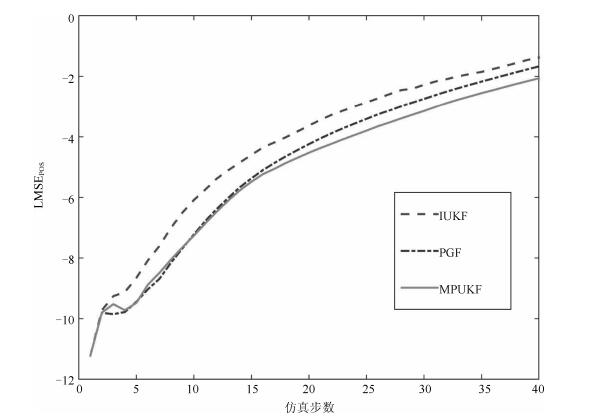
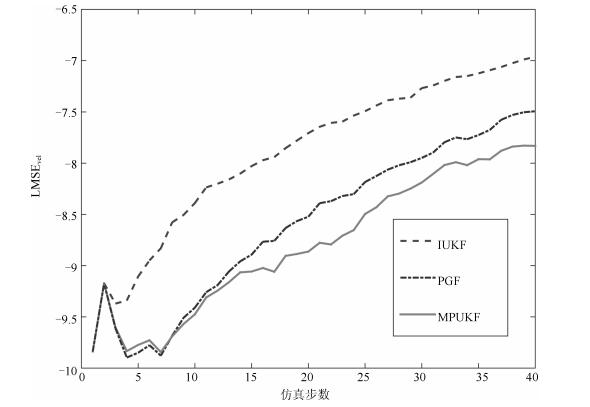
本文研究了一类存在量测信息缺失情况的目标跟踪问题,提出了一种高斯渐进框架下的目标跟踪方法以实现移动目标的跟踪.考虑可能存在的传感器故障或失效问题,采用假设检验方式以删选错误的量测信息.针对非线性滤波问题,量测信息的缺失将可能引起线性化误差、数值计算误差的增大,从而破坏目标跟踪估计器的稳定性和收敛性.为此,对渐进无迹卡尔曼滤波(Progressive unscented Kalman filter,PUKF)方法进行改进,使其更好地处理量测信息缺失引起的线性化误差、数值计算误差增大的问题.另外,通过对改进PUKF(Modified PUKF,MPUKF)方法的理论分析,证明其可保证渐进过程中的状态估计误差有界.最后,通过一个目标跟踪仿真实例表明,MPUKF方法比传统的IUKF方法和PUKF方法具有更高的跟踪精度.
本文研究了一类存在量测信息缺失情况的目标跟踪问题,提出了一种高斯渐进框架下的目标跟踪方法以实现移动目标的跟踪.考虑可能存在的传感器故障或失效问题,采用假设检验方式以删选错误的量测信息.针对非线性滤波问题,量测信息的缺失将可能引起线性化误差、数值计算误差的增大,从而破坏目标跟踪估计器的稳定性和收敛性.为此,对渐进无迹卡尔曼滤波(Progressive unscented Kalman filter,PUKF)方法进行改进,使其更好地处理量测信息缺失引起的线性化误差、数值计算误差增大的问题.另外,通过对改进PUKF(Modified PUKF,MPUKF)方法的理论分析,证明其可保证渐进过程中的状态估计误差有界.最后,通过一个目标跟踪仿真实例表明,MPUKF方法比传统的IUKF方法和PUKF方法具有更高的跟踪精度.

2018, 44(12): 2259-2268.
doi: 10.16383/j.aas.2018.c170510
摘要:
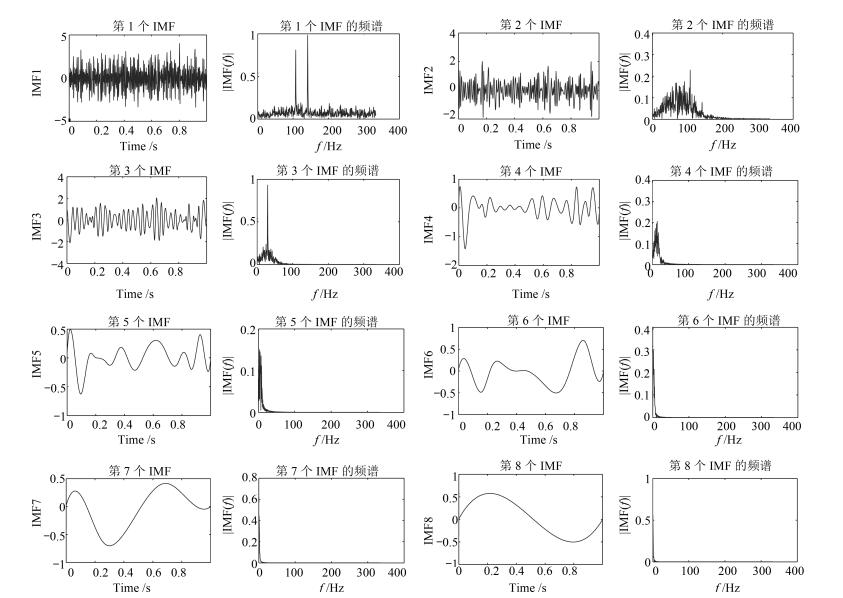
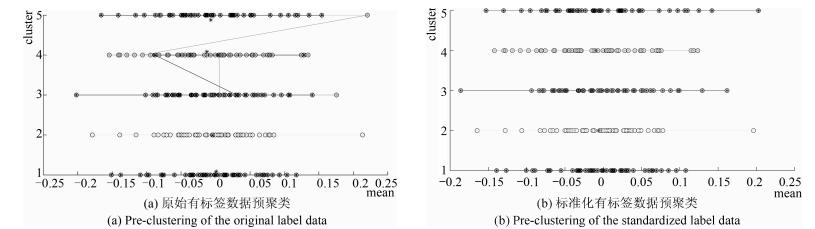
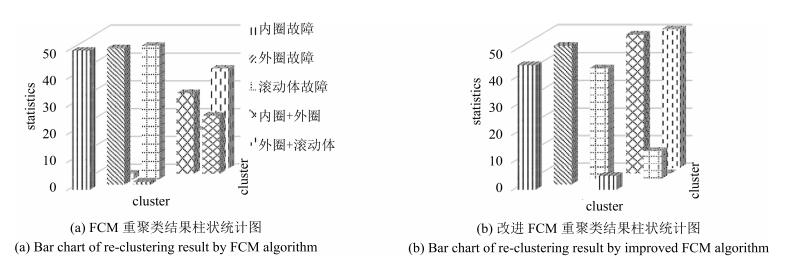
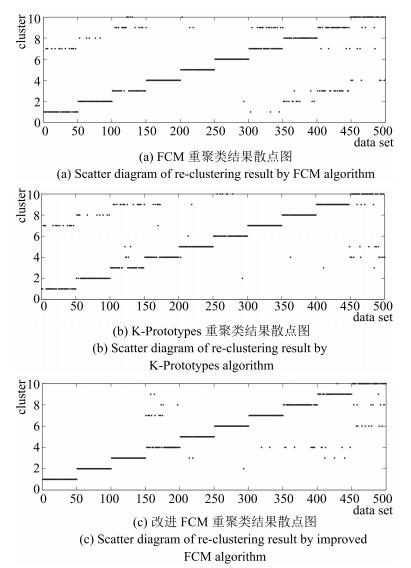
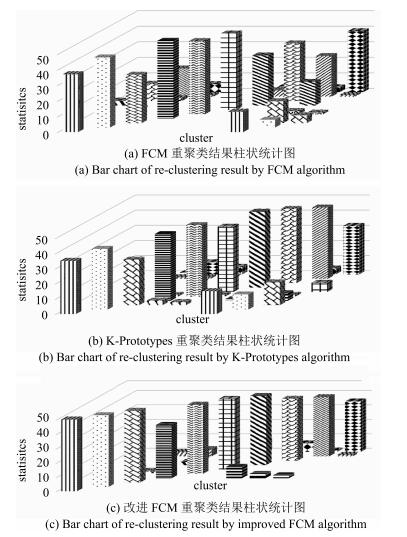
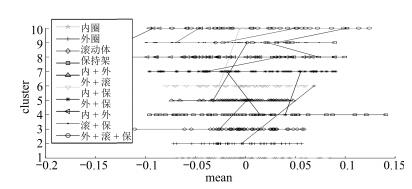
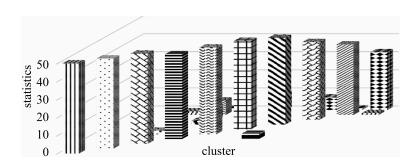
针对混合属性数据集聚类精度低的问题,本文提出一种基于改进距离度量的半监督模糊均值聚类(Fuzzy C-means,FCM)算法.首先,在数据集中针对类别属性进行预处理,并设置相应的相异度阈值;将传统聚类距离度量与改进的Jaccard距离度量结合,确定混合属性数据集的距离度量函数;最后,将所得距离度量函数与传统半监督FCM算法相结合,并在滚动轴承的不同复合故障数据的特征集中进行聚类.实验表明,该算法能在含无序属性的混合属性数据集的聚类中取得更好的聚类效果.
针对混合属性数据集聚类精度低的问题,本文提出一种基于改进距离度量的半监督模糊均值聚类(Fuzzy C-means,FCM)算法.首先,在数据集中针对类别属性进行预处理,并设置相应的相异度阈值;将传统聚类距离度量与改进的Jaccard距离度量结合,确定混合属性数据集的距离度量函数;最后,将所得距离度量函数与传统半监督FCM算法相结合,并在滚动轴承的不同复合故障数据的特征集中进行聚类.实验表明,该算法能在含无序属性的混合属性数据集的聚类中取得更好的聚类效果.

2018, 44(12): 2269-2277.
doi: 10.16383/j.aas.2018.c160839
摘要:
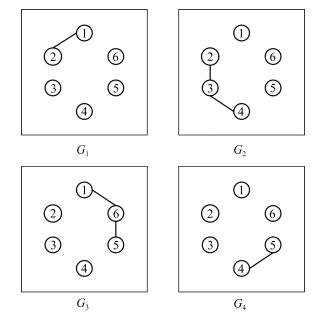
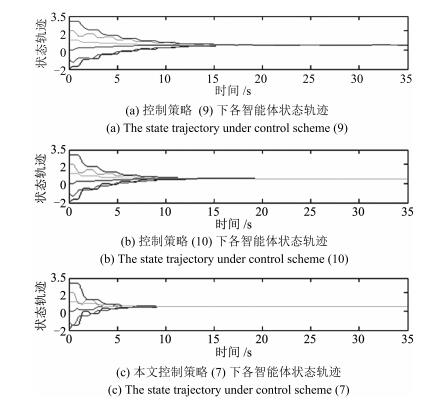
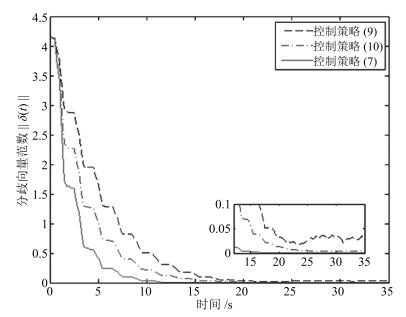
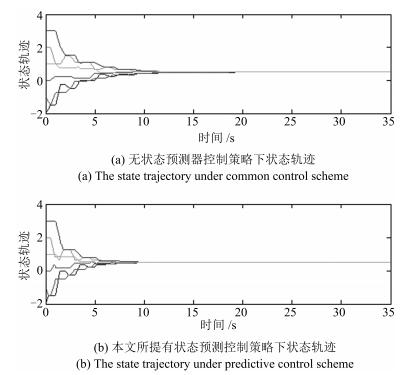
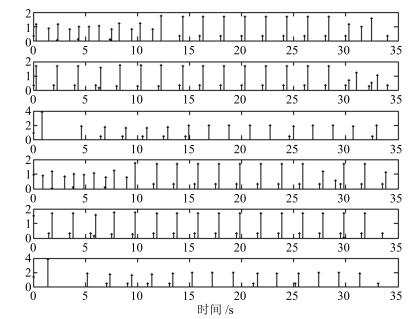
针对组合连通拓扑下多智能体系统控制过程中存在通信和计算资源损耗大以及系统收敛速度慢等问题,提出一种新的具有状态预测器的事件触发一致性控制协议,通过设计状态预测器使每个智能体都能对其邻居智能体的未来状态作出预测;同时,对于智能个体给出了基于状态信息的事件触发条件,当状态误差满足该条件才触发事件.在该控制策略下多智能体系统可在节约通信和计算资源的同时具有更快的收敛速度.利用Lyapunov稳定性理论和代数图论,证明了所提事件触发控制策略能够有效实现组合连通拓扑结构下的平均一致性,且不存在Zeno行为.仿真实例进一步验证了理论结果的有效性.
针对组合连通拓扑下多智能体系统控制过程中存在通信和计算资源损耗大以及系统收敛速度慢等问题,提出一种新的具有状态预测器的事件触发一致性控制协议,通过设计状态预测器使每个智能体都能对其邻居智能体的未来状态作出预测;同时,对于智能个体给出了基于状态信息的事件触发条件,当状态误差满足该条件才触发事件.在该控制策略下多智能体系统可在节约通信和计算资源的同时具有更快的收敛速度.利用Lyapunov稳定性理论和代数图论,证明了所提事件触发控制策略能够有效实现组合连通拓扑结构下的平均一致性,且不存在Zeno行为.仿真实例进一步验证了理论结果的有效性.
2018, 44(12): 2278-2289.
doi: 10.16383/j.aas.2018.c170573
摘要:
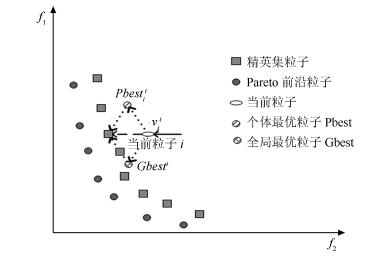
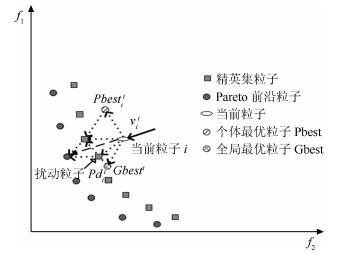
高维多目标优化问题由于具有巨大的目标空间使得一些经典的多目标优化算法面临挑战.提出一种基于自适应模糊支配的高维多目标粒子群算法MAPSOAF,该算法定义了一种自适应的模糊支配关系,通过对模糊支配的阈值自适应变化若干步长,在加强个体间支配能力的同时实现对种群选择压力的精细化控制,以改善算法的收敛性;其次,通过从外部档案集中选取扰动粒子,并在粒子速度更新公式中新增一扰动项以克服粒子群早熟收敛并改善个体分布的均匀性;另外,算法利用简化的Harmonic归一化距离评估个体的密度,在改善种群分布性的同时降低算法的计算代价.该算法与另外五种高性能的多目标进化算法在标准测试函数集DTLZ{1,2,4,5}上进行对比实验,结果表明该算法在收敛性和多样性方面总体上具有较显著的性能优势.
高维多目标优化问题由于具有巨大的目标空间使得一些经典的多目标优化算法面临挑战.提出一种基于自适应模糊支配的高维多目标粒子群算法MAPSOAF,该算法定义了一种自适应的模糊支配关系,通过对模糊支配的阈值自适应变化若干步长,在加强个体间支配能力的同时实现对种群选择压力的精细化控制,以改善算法的收敛性;其次,通过从外部档案集中选取扰动粒子,并在粒子速度更新公式中新增一扰动项以克服粒子群早熟收敛并改善个体分布的均匀性;另外,算法利用简化的Harmonic归一化距离评估个体的密度,在改善种群分布性的同时降低算法的计算代价.该算法与另外五种高性能的多目标进化算法在标准测试函数集DTLZ{1,2,4,5}上进行对比实验,结果表明该算法在收敛性和多样性方面总体上具有较显著的性能优势.
2018, 44(12): 2290-2299.
doi: 10.16383/j.aas.2018.c170480
摘要:
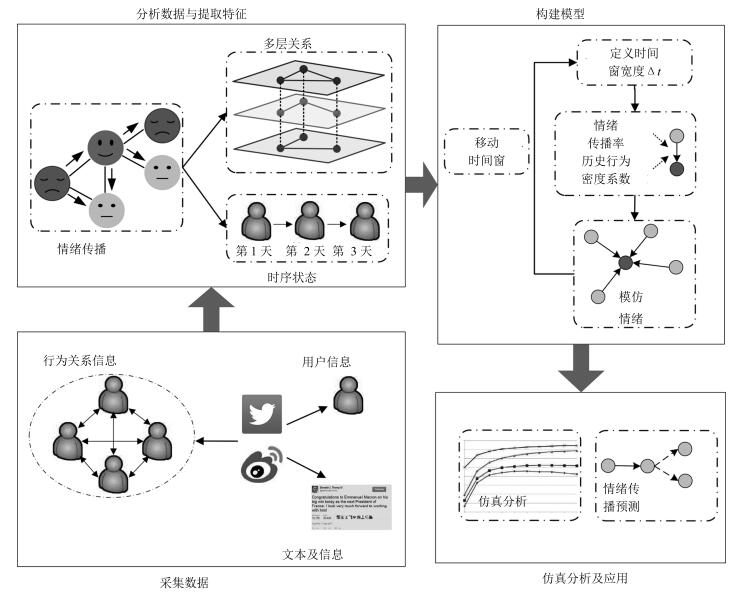
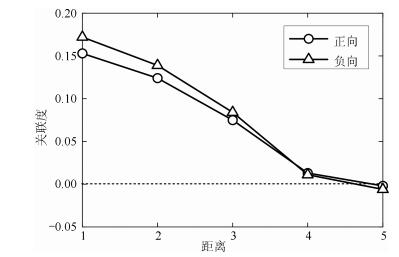
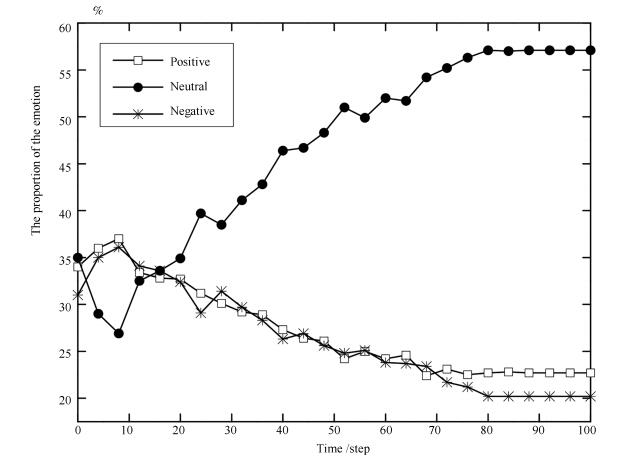
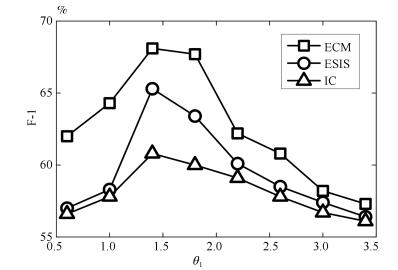
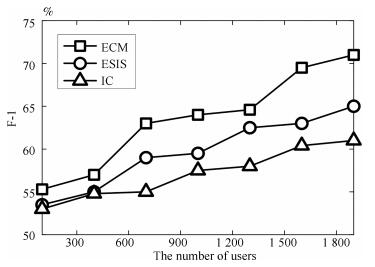
社交网络用户情绪传播与用户的空间距离和时间跨度有关,并且受到多种交互机制的影响.从大规模社交网络数据中提取情绪传播的时空特征,研究用户行为对情绪传播的影响,对预测情绪传播趋势具有实际意义.利用线性回归获取的各行为子层的情绪传输率之间存在差异.提出一种基于多层社交网络的情绪传播模型,被称为ECM模型(Emotional contagion model).该模型包括三个行为子层,每层的拓扑结构各不相同,由该行为的交互历史决定.在真实数据上对ECM模型进行仿真分析,可以获得社交网络中情绪传播的过程与规律:1)中性情绪用户所占比例随时间逐渐增大,接近57.1%,而正向情绪与负向情绪比例始终接近.2)情绪传输率越大,用户情绪更容易受到其他用户的影响而发生变化;初始情绪越中立的用户,在演化过程中情绪波动越小,而初始情绪极性越大的用户情绪波动越大.此外,通过实验对比该模型与其他情绪传播模型,表明ECM模型更加接近真实数据,对社交网络中情绪传播具有较好的预测效果,预测准确率相比其他模型可以提高1.8%~7.8%.
社交网络用户情绪传播与用户的空间距离和时间跨度有关,并且受到多种交互机制的影响.从大规模社交网络数据中提取情绪传播的时空特征,研究用户行为对情绪传播的影响,对预测情绪传播趋势具有实际意义.利用线性回归获取的各行为子层的情绪传输率之间存在差异.提出一种基于多层社交网络的情绪传播模型,被称为ECM模型(Emotional contagion model).该模型包括三个行为子层,每层的拓扑结构各不相同,由该行为的交互历史决定.在真实数据上对ECM模型进行仿真分析,可以获得社交网络中情绪传播的过程与规律:1)中性情绪用户所占比例随时间逐渐增大,接近57.1%,而正向情绪与负向情绪比例始终接近.2)情绪传输率越大,用户情绪更容易受到其他用户的影响而发生变化;初始情绪越中立的用户,在演化过程中情绪波动越小,而初始情绪极性越大的用户情绪波动越大.此外,通过实验对比该模型与其他情绪传播模型,表明ECM模型更加接近真实数据,对社交网络中情绪传播具有较好的预测效果,预测准确率相比其他模型可以提高1.8%~7.8%.



2018, 44(12): 2300-2304.
doi: 10.16383/j.aas.2018.c170193
摘要:
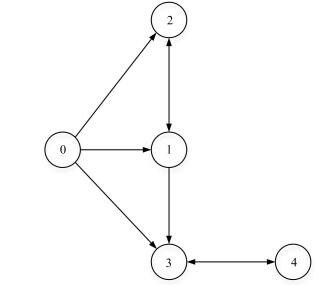
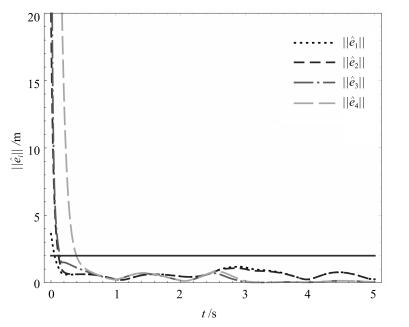
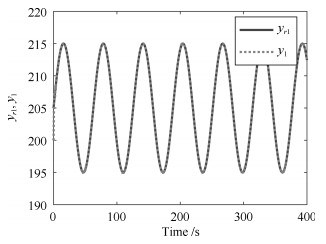
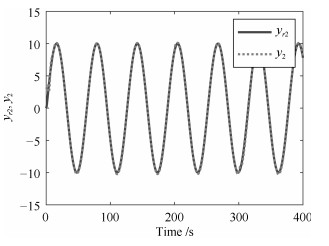
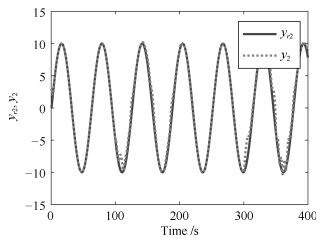
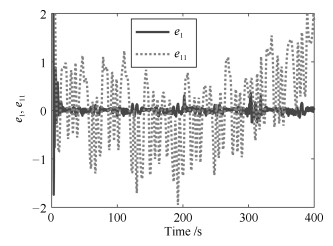
一致性理论在许多领域有广泛应用.现有很多研究成果是关于恒同一致的.在实际中,由于任何系统都会不可避免地受到一定的外界扰动,要求误差函数的极限等于0是难以做到的,但当时间充分大时误差函数在可接受区间内是可行的.本文首先给出多智能体系统的实用一致性概念,然后研究含未知耦合权重的一阶非线性领导-跟随多智能体系统的实用一致性问题.通过设计合适的控制协议,运用图论、矩阵理论和强实用稳定性理论,得到该多智能体系统实现实用一致性的充分条件.数值模拟验证了理论结果的正确性.
一致性理论在许多领域有广泛应用.现有很多研究成果是关于恒同一致的.在实际中,由于任何系统都会不可避免地受到一定的外界扰动,要求误差函数的极限等于0是难以做到的,但当时间充分大时误差函数在可接受区间内是可行的.本文首先给出多智能体系统的实用一致性概念,然后研究含未知耦合权重的一阶非线性领导-跟随多智能体系统的实用一致性问题.通过设计合适的控制协议,运用图论、矩阵理论和强实用稳定性理论,得到该多智能体系统实现实用一致性的充分条件.数值模拟验证了理论结果的正确性.