
2017年 第43卷 第9期
2017, 43(9): 1491-1508.
doi: 10.16383/j.aas.2017.c160667
摘要:
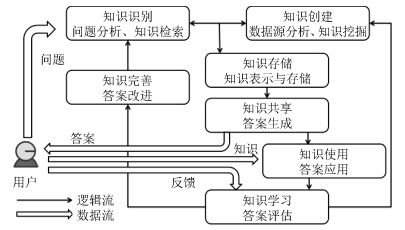
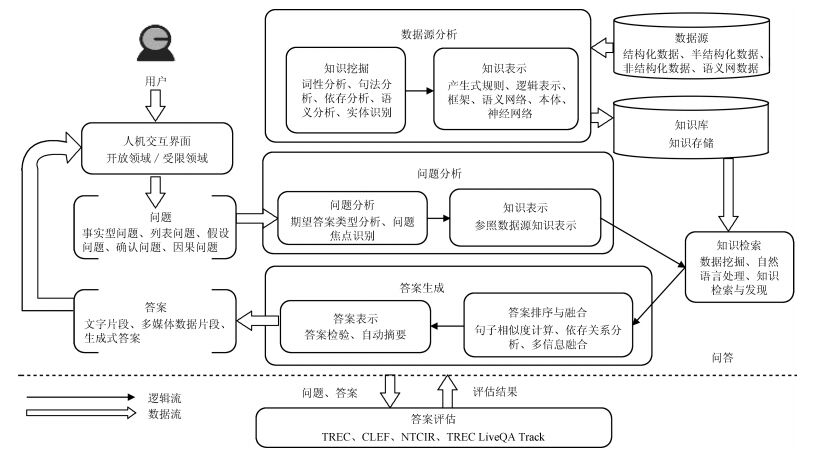
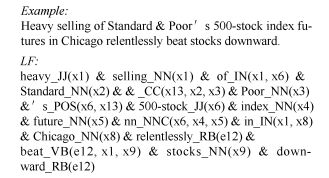
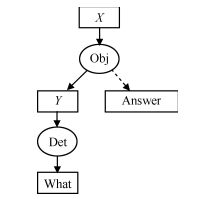
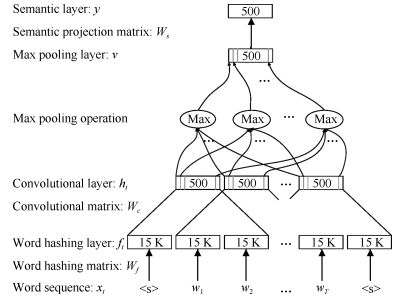
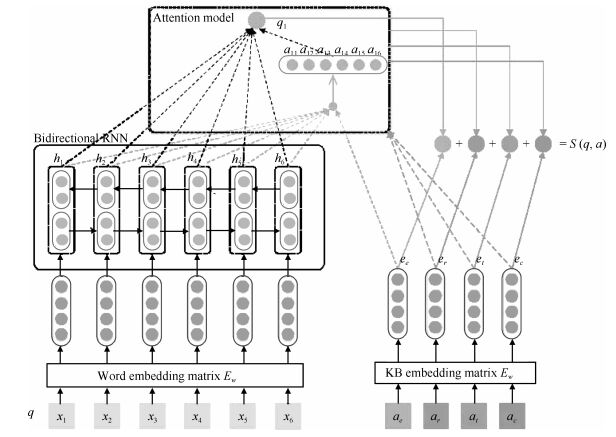
将自动问答系统从基于文本关键词的层面,提升到基于知识的层面,实现个性化、智能化的知识机器人,已成为自动问答系统未来的发展趋势与目标.本文从知识管理的角度出发,分析和总结自动问答领域的最新研究成果.按照知识表示方法,对代表性自动问答系统及关键问题进行了描述和分析;并对主流的英文、中文自动问答应用和主要评测方法进行了介绍.
将自动问答系统从基于文本关键词的层面,提升到基于知识的层面,实现个性化、智能化的知识机器人,已成为自动问答系统未来的发展趋势与目标.本文从知识管理的角度出发,分析和总结自动问答领域的最新研究成果.按照知识表示方法,对代表性自动问答系统及关键问题进行了描述和分析;并对主流的英文、中文自动问答应用和主要评测方法进行了介绍.
2017, 43(9): 1509-1519.
doi: 10.16383/j.aas.2017.c160648
摘要:
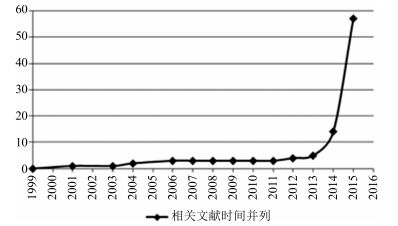
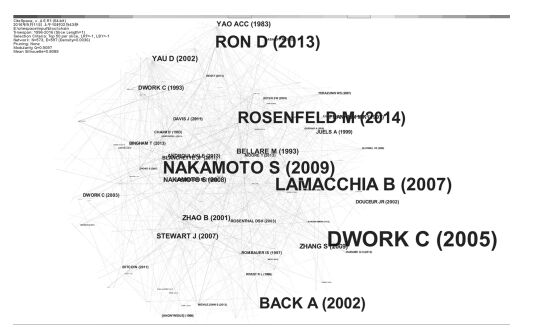
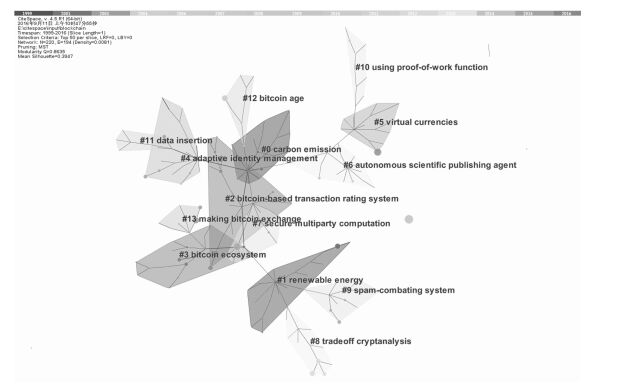
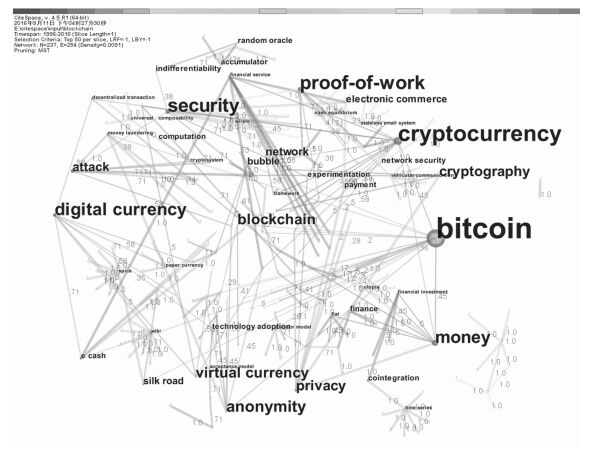
区块链与比特币作为当前一种重要的新兴技术和数字货币,随着相关应用的拓展,一些理论和应用问题开始得到更多的关注.近年来,区块链和比特币的相关概念已经逐渐扩散到其他的学术领域.但是,对区块链和比特币相关主题的知识结构(Intellectual structure),包括知识基础(Intellectual base)和研究前沿(Research front)的探讨较少,定量化研究基本为空白.本文通过对Web of Science数据库收录的相关文献进行计量分析,并结合科学图谱分析工具,以较为直观的方式,部分呈现了区块链与比特币相关主题的知识结构,其中包括以共被引聚类分析呈现的知识基础和以耦合聚类分析和关键词共现分析呈现的研究前沿.对于推进区块链和比特币相关主题的知识扩散,以及对未来区块链和比特币的相关学术研究具有一定的参考价值.
区块链与比特币作为当前一种重要的新兴技术和数字货币,随着相关应用的拓展,一些理论和应用问题开始得到更多的关注.近年来,区块链和比特币的相关概念已经逐渐扩散到其他的学术领域.但是,对区块链和比特币相关主题的知识结构(Intellectual structure),包括知识基础(Intellectual base)和研究前沿(Research front)的探讨较少,定量化研究基本为空白.本文通过对Web of Science数据库收录的相关文献进行计量分析,并结合科学图谱分析工具,以较为直观的方式,部分呈现了区块链与比特币相关主题的知识结构,其中包括以共被引聚类分析呈现的知识基础和以耦合聚类分析和关键词共现分析呈现的研究前沿.对于推进区块链和比特币相关主题的知识扩散,以及对未来区块链和比特币的相关学术研究具有一定的参考价值.
2017, 43(9): 1520-1531.
doi: 10.16383/j.aas.2017.c160672
摘要:
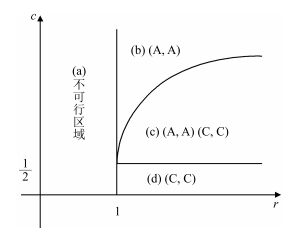
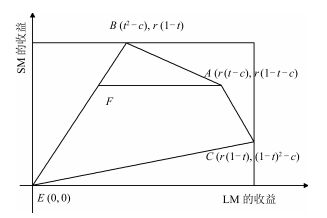
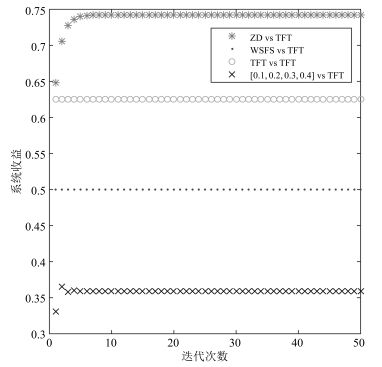
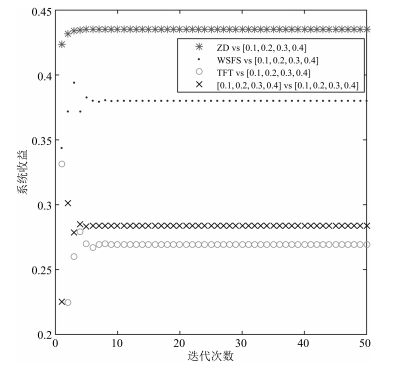
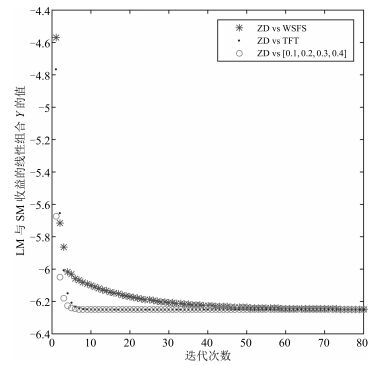
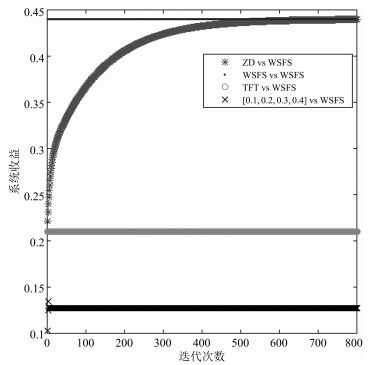
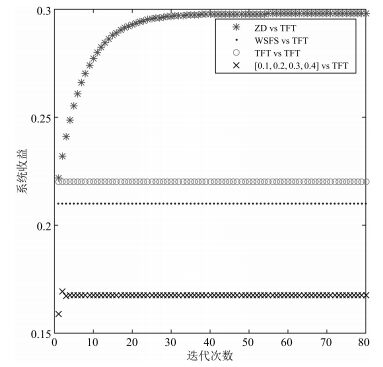
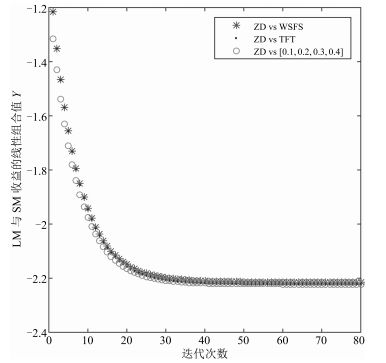
区块链是随着比特币等数字加密货币逐渐兴起而盛行的一种新型去中心化分布式系统,具有去中心化、时序数据、集体维护、可编程和安全可信等特点.目前,区块链已引起政府部门、金融机构、科技企业和资本市场的高度重视与广泛关注.如何在一个去中心化的分布式系统中高效地达成共识是区块链技术研究的重要问题.本文从工作量证明(Proof of work,PoW)共识算法的挖矿困境入手,分析PoW共识过程中矿工策略选择的纳什均衡存在条件.利用零行列式(Zero determinant,ZD)策略对矿工策略选择进行优化,并通过数值仿真来验证优化算法的有效性.概括来说,本文从博弈论角度来理解和剖析PoW共识算法,为进一步设计基于博弈论的共识算法提供新的思路和方法.
区块链是随着比特币等数字加密货币逐渐兴起而盛行的一种新型去中心化分布式系统,具有去中心化、时序数据、集体维护、可编程和安全可信等特点.目前,区块链已引起政府部门、金融机构、科技企业和资本市场的高度重视与广泛关注.如何在一个去中心化的分布式系统中高效地达成共识是区块链技术研究的重要问题.本文从工作量证明(Proof of work,PoW)共识算法的挖矿困境入手,分析PoW共识过程中矿工策略选择的纳什均衡存在条件.利用零行列式(Zero determinant,ZD)策略对矿工策略选择进行优化,并通过数值仿真来验证优化算法的有效性.概括来说,本文从博弈论角度来理解和剖析PoW共识算法,为进一步设计基于博弈论的共识算法提供新的思路和方法.


2017, 43(9): 1532-1543.
doi: 10.16383/j.aas.2017.c160655
摘要:
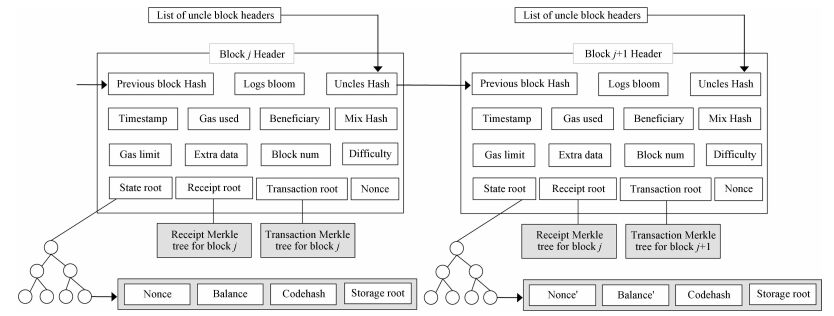
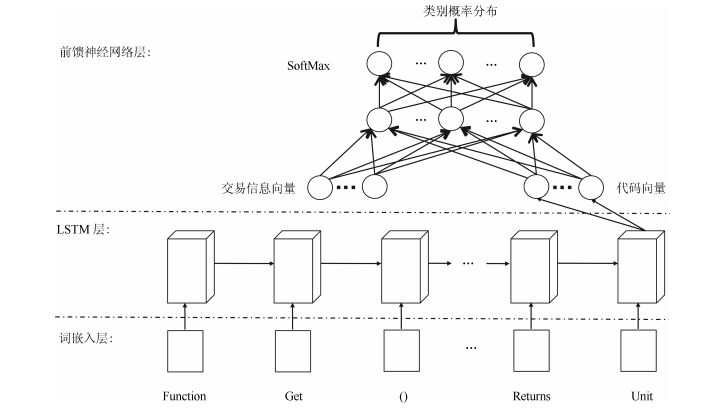
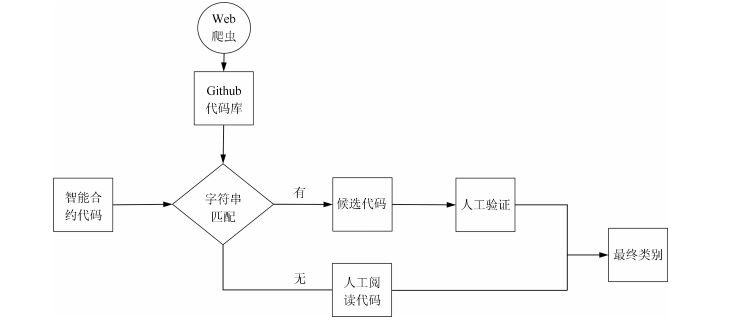
作为区块链技术的一个突破性扩展,智能合约允许用户在区块链上实现个性化的代码逻辑从而使得区块链技术更加的简单易用.在智能合约代码信息迅速增长的背景下,如何管理和组织海量智能合约代码变得更具挑战性.基于人工智能技术的代码分类系统能根据代码的文本信息自动分门别类,从而更好地帮助人们管理和组织代码的信息.本文以Ethereum平台上的智能合约为例,鉴于词嵌入模型可以捕获代码的语义信息,提出一种基于词嵌入模型的智能合约分类系统.另外,每一个智能合约都关联着一系列交易,我们又通过智能合约的交易信息来更深入地了解智能合约的逻辑行为.据我们所知,本文是对智能合约代码自动分类问题的首次研究尝试.测试结果显示该系统具有较为令人满意的分类性能.
作为区块链技术的一个突破性扩展,智能合约允许用户在区块链上实现个性化的代码逻辑从而使得区块链技术更加的简单易用.在智能合约代码信息迅速增长的背景下,如何管理和组织海量智能合约代码变得更具挑战性.基于人工智能技术的代码分类系统能根据代码的文本信息自动分门别类,从而更好地帮助人们管理和组织代码的信息.本文以Ethereum平台上的智能合约为例,鉴于词嵌入模型可以捕获代码的语义信息,提出一种基于词嵌入模型的智能合约分类系统.另外,每一个智能合约都关联着一系列交易,我们又通过智能合约的交易信息来更深入地了解智能合约的逻辑行为.据我们所知,本文是对智能合约代码自动分类问题的首次研究尝试.测试结果显示该系统具有较为令人满意的分类性能.


2017, 43(9): 1544-1554.
doi: 10.16383/j.aas.2017.c160744
摘要:
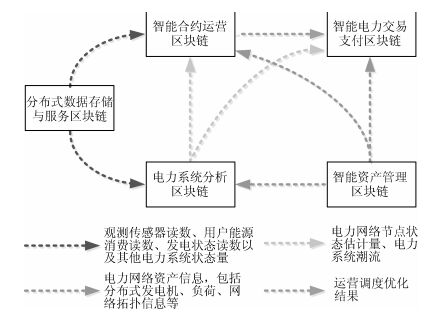
智能分布式电力能源系统(Intelligent distributed,electrical energy systems,IDEES)具有组件种类繁多,数量庞大,管理困难,利润低微等特点,导致传统中心化的运营管理不再适合此类系统,而区块链技术可能是推行大规模分布式智能电力能源系统重要的技术路径.由于电力能源系统是一种具有社会和技术双重属性的系统,从而注定了其在用区块链实现运行时,必然需要多种区块链来描述和建模其不同的属性,在文中称之为“区块链群”.具体来说,从底层到高层,这个区块链群由分布式数据存储与服务区块链、智能资产管理区块链、电力系统分析区块链、智能合约运营区块链和智能电力交易支付区块链组成.基于区块链技术、分布式文件服务技术、分布式电力系统分析与管理技术,这些不同层次和功能的区块链自我组织、互相协助,最后形成一个分布式自主的电力能源运行系统.在此复杂系统中,频繁而深度的计算与交互衍生出系统智能,笔者期望这种智能将促成稳定、可靠、有效的电力能源生产、传输与消费.
智能分布式电力能源系统(Intelligent distributed,electrical energy systems,IDEES)具有组件种类繁多,数量庞大,管理困难,利润低微等特点,导致传统中心化的运营管理不再适合此类系统,而区块链技术可能是推行大规模分布式智能电力能源系统重要的技术路径.由于电力能源系统是一种具有社会和技术双重属性的系统,从而注定了其在用区块链实现运行时,必然需要多种区块链来描述和建模其不同的属性,在文中称之为“区块链群”.具体来说,从底层到高层,这个区块链群由分布式数据存储与服务区块链、智能资产管理区块链、电力系统分析区块链、智能合约运营区块链和智能电力交易支付区块链组成.基于区块链技术、分布式文件服务技术、分布式电力系统分析与管理技术,这些不同层次和功能的区块链自我组织、互相协助,最后形成一个分布式自主的电力能源运行系统.在此复杂系统中,频繁而深度的计算与交互衍生出系统智能,笔者期望这种智能将促成稳定、可靠、有效的电力能源生产、传输与消费.

2017, 43(9): 1555-1562.
doi: 10.16383/j.aas.2017.c160661
摘要:
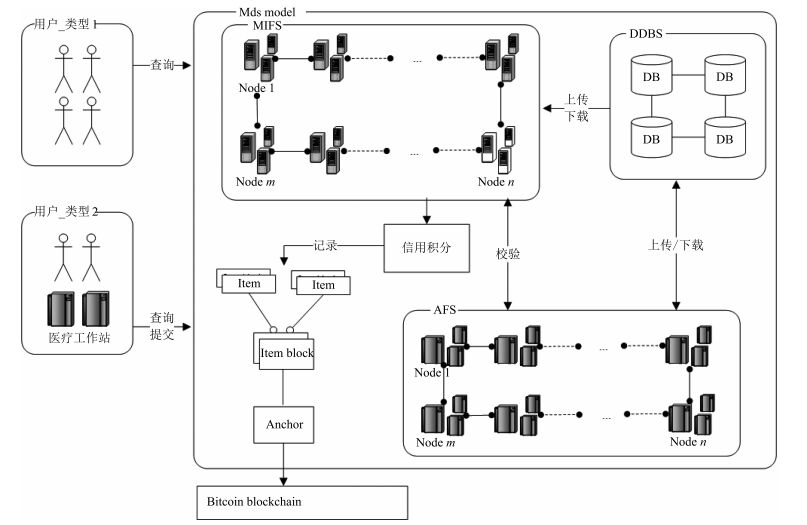
根据医疗行业现状,不难发现各医疗机构间共享数据困难,因为医疗数据的校验、保存和同步一直是一个难点.病人、医生以及研究人员在访问和共享医疗数据时存在严格的限制,这一过程需要花费大量的资源和时间用于权限审查和数据校验.本文提出一个基于区块链的医疗数据共享模型,具有去中心化、安全可信、集体维护、不可篡改等特点,适用于解决各医疗机构数据共享的难题.本文详细介绍了模型的组件以及实现原理.将现有医疗机构进行分类,配合使用改进的共识机制实现了方便、安全、快捷的数据共享.此外,通过对比医疗数据共享存在的问题,分析了本模型的优势以及带来的影响.
根据医疗行业现状,不难发现各医疗机构间共享数据困难,因为医疗数据的校验、保存和同步一直是一个难点.病人、医生以及研究人员在访问和共享医疗数据时存在严格的限制,这一过程需要花费大量的资源和时间用于权限审查和数据校验.本文提出一个基于区块链的医疗数据共享模型,具有去中心化、安全可信、集体维护、不可篡改等特点,适用于解决各医疗机构数据共享的难题.本文详细介绍了模型的组件以及实现原理.将现有医疗机构进行分类,配合使用改进的共识机制实现了方便、安全、快捷的数据共享.此外,通过对比医疗数据共享存在的问题,分析了本模型的优势以及带来的影响.



2017, 43(9): 1563-1570.
doi: 10.16383/j.aas.2017.c160643
摘要:
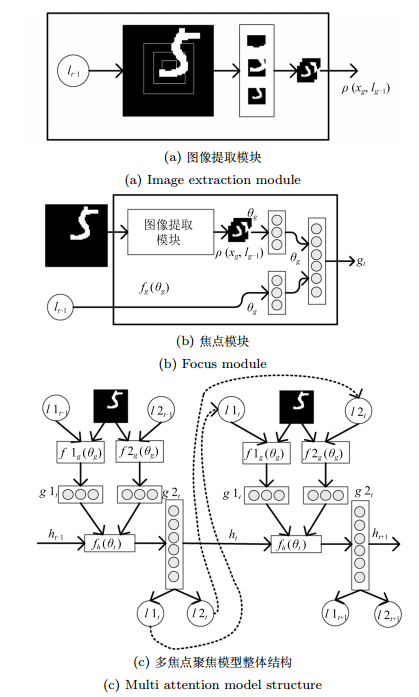
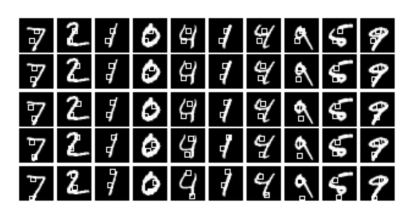
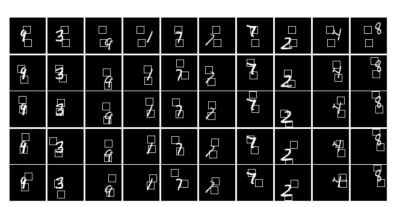
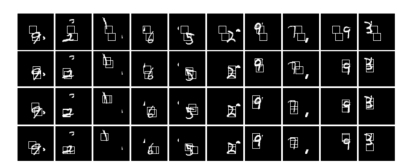
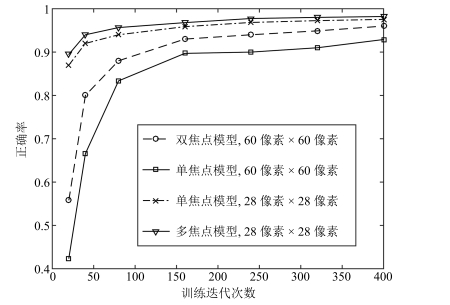
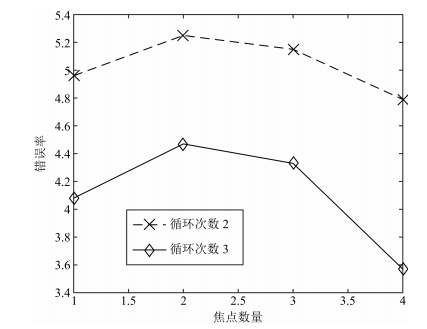
聚焦模型(Attention model,AM)将计算资源集中于输入数据特定区域,相比卷积神经网络,AM具有参数少、计算量独立输入和高噪声下正确率较高等优点.相对于输入图像和识别目标,聚焦区域通常较小;如果聚焦区域过小,就会导致过多的迭代次数,降低了效率,也难以在同一输入中寻找多个目标.因此本文提出多焦点聚焦模型,同时对多处并行聚焦.使用增强学习(Reinforce learning,RL)进行训练,将所有焦点的行为统一评分训练.与单焦点聚焦模型相比,训练速度和识别速度提高了25%.同时本模型具有较高的通用性.
聚焦模型(Attention model,AM)将计算资源集中于输入数据特定区域,相比卷积神经网络,AM具有参数少、计算量独立输入和高噪声下正确率较高等优点.相对于输入图像和识别目标,聚焦区域通常较小;如果聚焦区域过小,就会导致过多的迭代次数,降低了效率,也难以在同一输入中寻找多个目标.因此本文提出多焦点聚焦模型,同时对多处并行聚焦.使用增强学习(Reinforce learning,RL)进行训练,将所有焦点的行为统一评分训练.与单焦点聚焦模型相比,训练速度和识别速度提高了25%.同时本模型具有较高的通用性.


2017, 43(9): 1571-1579.
doi: 10.16383/j.aas.2017.c160674
摘要:
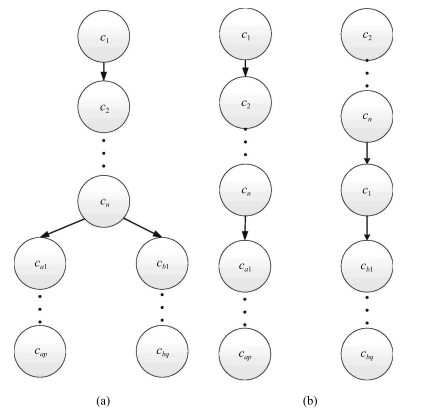
专家系统是人工智能领域的重要分支,其中知识表示和知识推理是专家系统的重要组成部分.Rete算法是一种高效的模式匹配算法,能够解决专家系统中推理效率的问题,但是Rete算法在构建Rete网络和推理过程中存在空间和性能方面问题.本文采取有穷自动机理论的思想,阐述了Rete算法中的模式共享度和节点共享度模型,提出了一种Rete网络构建和推理算法来降低Rete网络的复杂度,提升Rete网络推理的速度.最后实验结果表明,本算法能够降低网络复杂度,提升推理速度.
专家系统是人工智能领域的重要分支,其中知识表示和知识推理是专家系统的重要组成部分.Rete算法是一种高效的模式匹配算法,能够解决专家系统中推理效率的问题,但是Rete算法在构建Rete网络和推理过程中存在空间和性能方面问题.本文采取有穷自动机理论的思想,阐述了Rete算法中的模式共享度和节点共享度模型,提出了一种Rete网络构建和推理算法来降低Rete网络的复杂度,提升Rete网络推理的速度.最后实验结果表明,本算法能够降低网络复杂度,提升推理速度.

2017, 43(9): 1580-1587.
doi: 10.16383/j.aas.2017.c160676
摘要:
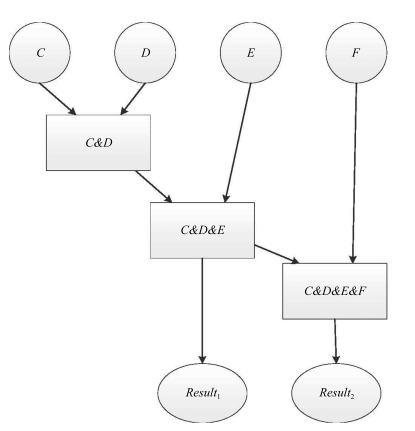
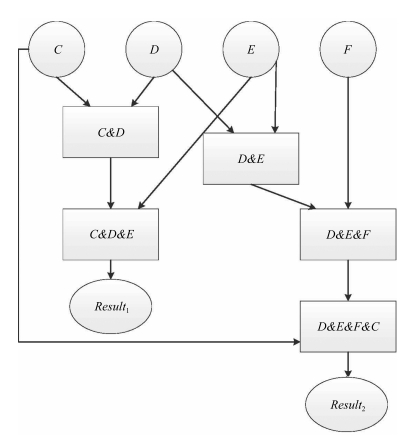
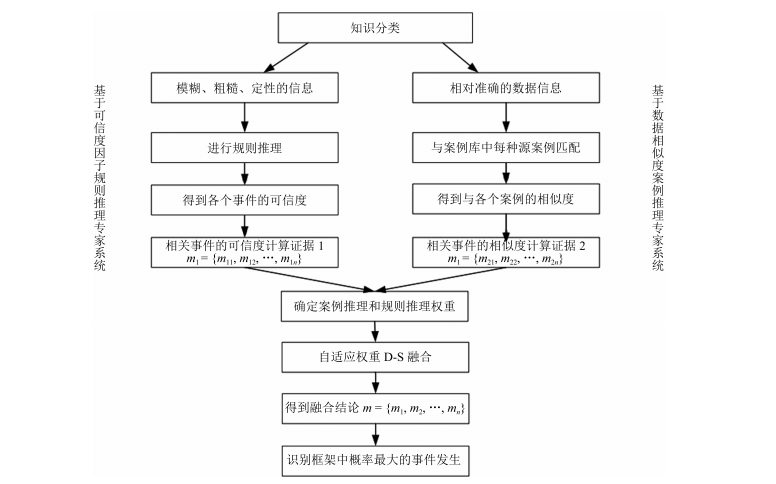
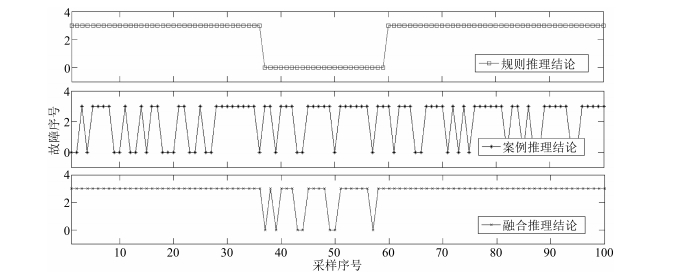
复杂流程工业过程知识类型多样且含有多种不确定性,针对这些问题提出一种基于D-S融合的混合知识系统故障诊断方法.根据可利用信息的类型建立不同的专家知识系统并进行不确定性推理.通过分析当前信息的数据特点,自适应分配不同专家知识系统可靠性权重,通过权重D-S证据理论融合各专家知识系统的结论.这种方法不仅使用了专家的知识和经验,而且结合了生产过程积累的大量数据信息,提高了信息的利用率.通过融合多个专家知识系统的结论,提高了不确定性系统故障诊断的正确率.将该方法应用于某湿法冶金浓密过程故障诊断,取得了良好的诊断效果.
复杂流程工业过程知识类型多样且含有多种不确定性,针对这些问题提出一种基于D-S融合的混合知识系统故障诊断方法.根据可利用信息的类型建立不同的专家知识系统并进行不确定性推理.通过分析当前信息的数据特点,自适应分配不同专家知识系统可靠性权重,通过权重D-S证据理论融合各专家知识系统的结论.这种方法不仅使用了专家的知识和经验,而且结合了生产过程积累的大量数据信息,提高了信息的利用率.通过融合多个专家知识系统的结论,提高了不确定性系统故障诊断的正确率.将该方法应用于某湿法冶金浓密过程故障诊断,取得了良好的诊断效果.
2017, 43(9): 1588-1596.
doi: 10.16383/j.aas.2017.c160664
摘要:
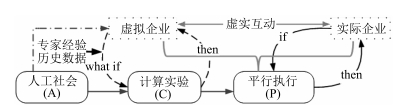
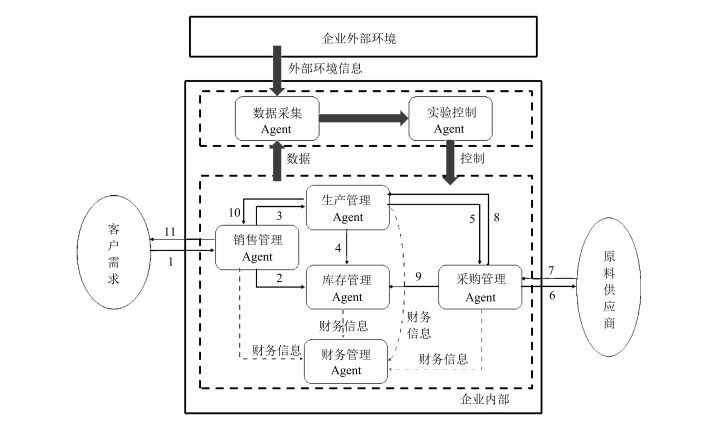
传统的企业资源计划(Enterprise resource planning,ERP)采用静态化的业务流程设计理念,忽略了人的关键作用,且很少涉及系统性的过程模型,因此难以应对现代企业资源计划的复杂性要求.为实现现代企业资源计划的新范式,本文在ACP(人工社会(Artificial societies)、计算实验(Computational experiments)、平行执行(Parallel execution))方法框架下,以大数据为驱动,融合深度强化学习方法,构建基于平行管理的企业ERP系统.首先基于多Agent构建ERP整体建模框架,然后针对企业ERP的整个流程建立序贯博弈模型,最后运用基于深度强化学习的神经网络寻找最优策略,解决复杂企业ERP所面临的不确定性、多样性和复杂性.
传统的企业资源计划(Enterprise resource planning,ERP)采用静态化的业务流程设计理念,忽略了人的关键作用,且很少涉及系统性的过程模型,因此难以应对现代企业资源计划的复杂性要求.为实现现代企业资源计划的新范式,本文在ACP(人工社会(Artificial societies)、计算实验(Computational experiments)、平行执行(Parallel execution))方法框架下,以大数据为驱动,融合深度强化学习方法,构建基于平行管理的企业ERP系统.首先基于多Agent构建ERP整体建模框架,然后针对企业ERP的整个流程建立序贯博弈模型,最后运用基于深度强化学习的神经网络寻找最优策略,解决复杂企业ERP所面临的不确定性、多样性和复杂性.


2017, 43(9): 1597-1606.
doi: 10.16383/j.aas.2017.c160644
摘要:
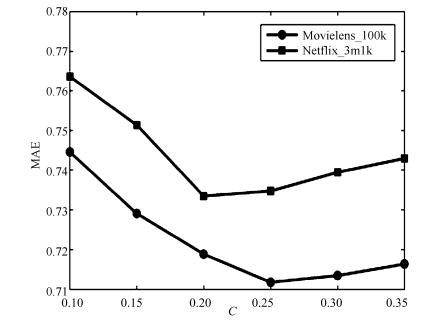
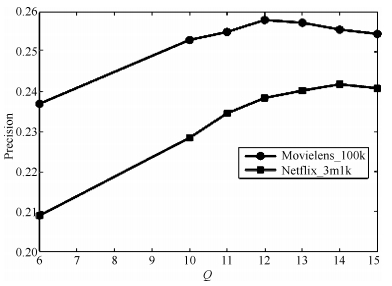
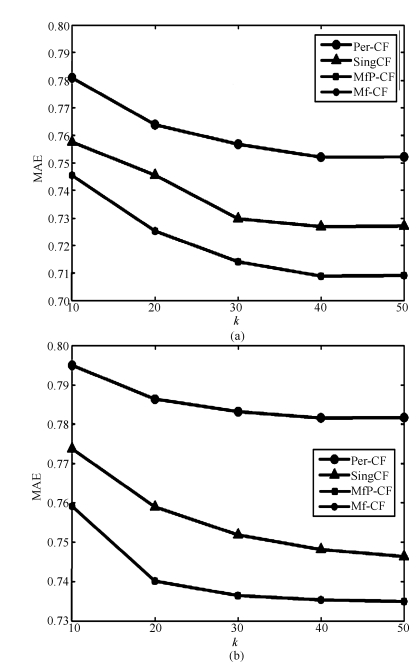
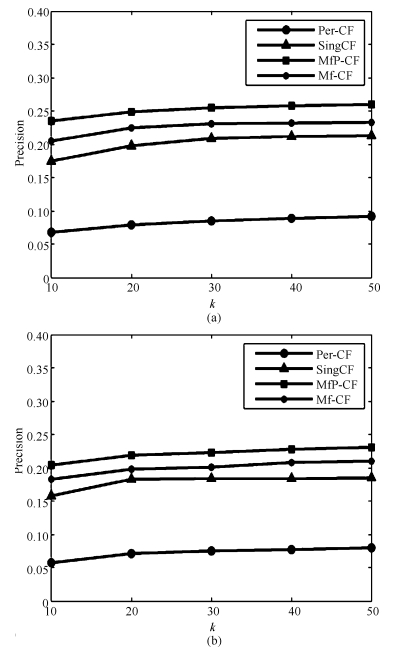
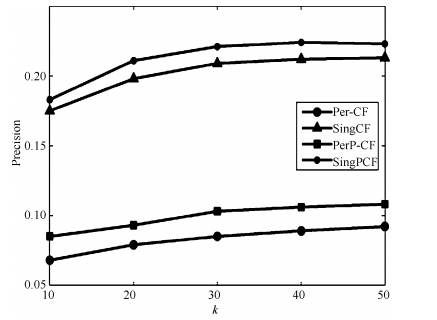
针对传统矩阵填充算法忽略了预测评分与真实评分之间的可信度差异和传统Top-N方法推荐精度低等问题,提出了一种改进的协同过滤算法.该算法首先利用置信系数C区分评分值之间的可信度;然后提出物品可预测性的概念,综合物品的预测评分与物品的可预测性进行物品推荐并将其转化为0-1背包问题,从而筛选出最优化的推荐列表.实验结果表明:该算法能有效缓解稀疏性的影响,提高推荐性能,并且算法具有良好的可扩展性.
针对传统矩阵填充算法忽略了预测评分与真实评分之间的可信度差异和传统Top-N方法推荐精度低等问题,提出了一种改进的协同过滤算法.该算法首先利用置信系数C区分评分值之间的可信度;然后提出物品可预测性的概念,综合物品的预测评分与物品的可预测性进行物品推荐并将其转化为0-1背包问题,从而筛选出最优化的推荐列表.实验结果表明:该算法能有效缓解稀疏性的影响,提高推荐性能,并且算法具有良好的可扩展性.



2017, 43(9): 1607-1618.
doi: 10.16383/j.aas.2017.e150116
摘要:
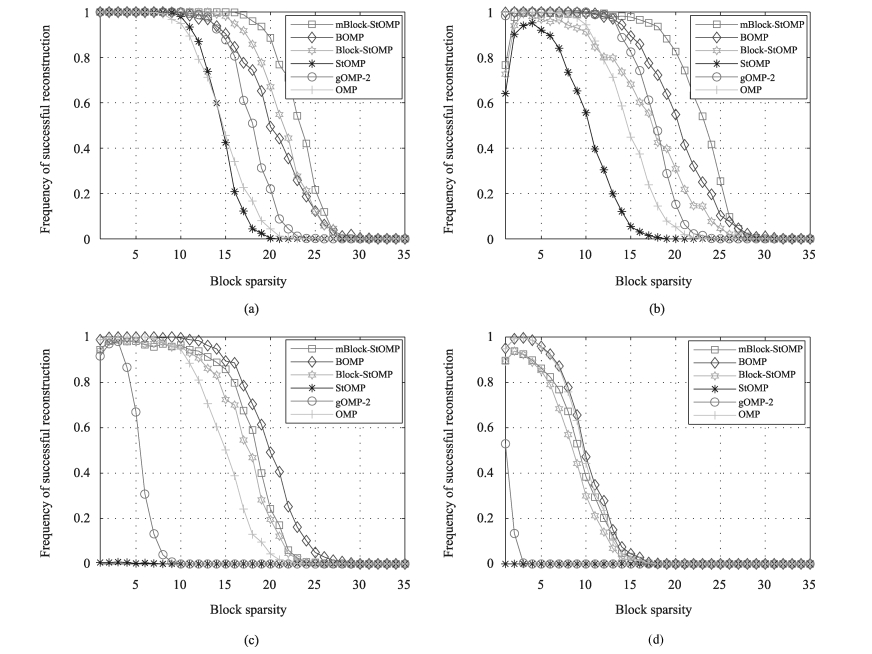
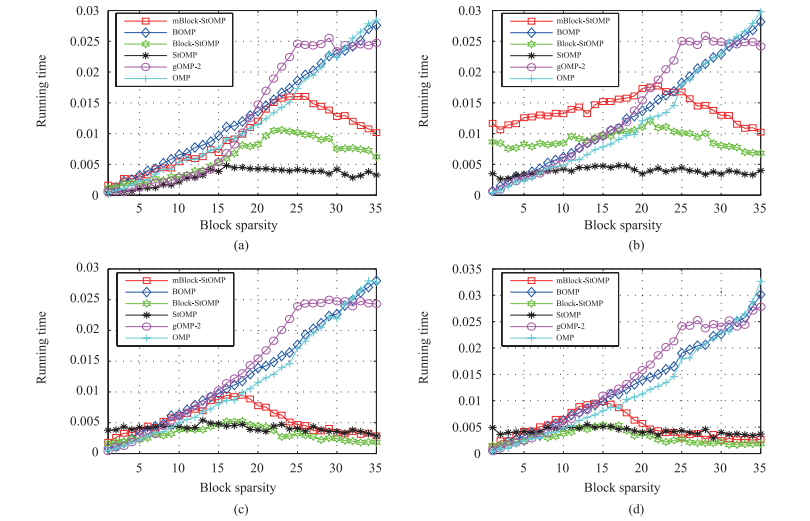
Many problems arisen in research fields like systems biology and signal processing can be formulated as problems of block sparse signal recovery. Generally, it is known that to pursue the sparsest solution of an underdetermined system of linear equations is non-deterministic polynomial (NP)-hard. To solve block sparse recovery problems, the algorithm of block stagewise orthogonal matching pursuit (Block-StOMP) has been proposed to recover block sparse signals from compressed measurements, which is a greedy algorithm with satisfactory practical performance and some particularly interesting theoretical properties. In this paper, we propose an improved version of Block-StOMP, termed mBlock-StOMP. Specifically, mBlock-StOMP uses the estimated TDR (true discovery rate) to prune support sets of each stage in order to decrease FAR (false alarm rate) and pursue high recovery accuracy. Moreover, rigorous theoretical analysis for mBlock-StOMP is given in this paper. Compared with Block-StOMP, simulation results demonstrate that mBlock-StOMP outperforms Block-StOMP in terms of reconstruction accuracy without increasing computational burden significantly.
Many problems arisen in research fields like systems biology and signal processing can be formulated as problems of block sparse signal recovery. Generally, it is known that to pursue the sparsest solution of an underdetermined system of linear equations is non-deterministic polynomial (NP)-hard. To solve block sparse recovery problems, the algorithm of block stagewise orthogonal matching pursuit (Block-StOMP) has been proposed to recover block sparse signals from compressed measurements, which is a greedy algorithm with satisfactory practical performance and some particularly interesting theoretical properties. In this paper, we propose an improved version of Block-StOMP, termed mBlock-StOMP. Specifically, mBlock-StOMP uses the estimated TDR (true discovery rate) to prune support sets of each stage in order to decrease FAR (false alarm rate) and pursue high recovery accuracy. Moreover, rigorous theoretical analysis for mBlock-StOMP is given in this paper. Compared with Block-StOMP, simulation results demonstrate that mBlock-StOMP outperforms Block-StOMP in terms of reconstruction accuracy without increasing computational burden significantly.



2017, 43(9): 1619-1624.
doi: 10.16383/j.aas.2017.e150118
摘要:
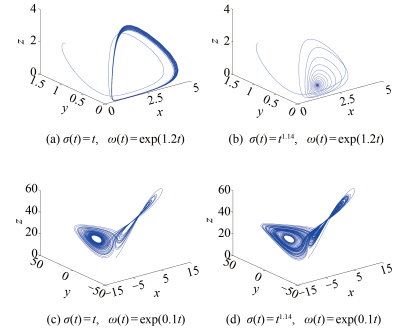
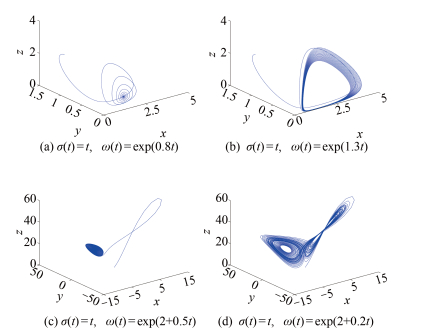
In view of a new generalized fractional calculus proposed recently, this paper is devoted to applying the generalized fractional derivatives to study new generalized fractional chaotic systems. The chaotic properties depending on the new generalized fractional derivative are discussed and shown graphically. The generalized fractional derivative is described in the Caputo sense, and the finite difference approach for solving the generalized fractional chaotic system is presented. Since the generalized fractional derivative includes many existing fractional derivatives as special cases, we hope more attention will be brought into this field in the near future.
In view of a new generalized fractional calculus proposed recently, this paper is devoted to applying the generalized fractional derivatives to study new generalized fractional chaotic systems. The chaotic properties depending on the new generalized fractional derivative are discussed and shown graphically. The generalized fractional derivative is described in the Caputo sense, and the finite difference approach for solving the generalized fractional chaotic system is presented. Since the generalized fractional derivative includes many existing fractional derivatives as special cases, we hope more attention will be brought into this field in the near future.

2017, 43(9): 1625-1635.
doi: 10.16383/j.aas.2017.e160214
摘要:
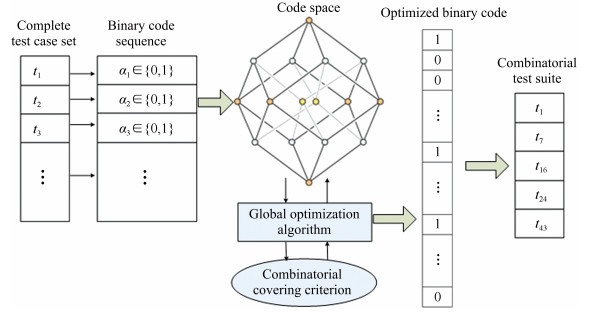
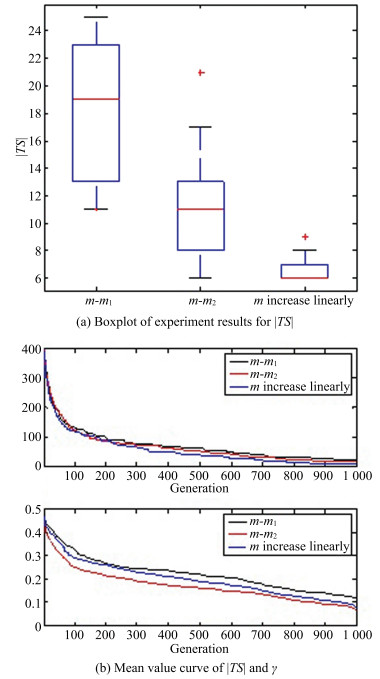
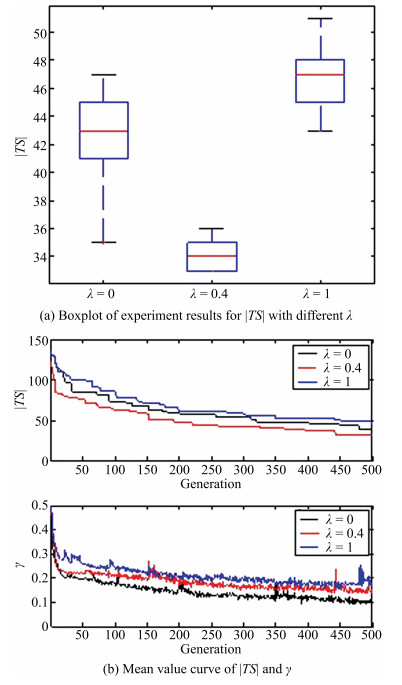
The test suite generation is a key task for combinatorial testing of software. In order to generate high-quality testing data, a cluster searching driven global optimization mechanism is proposed. In this approach, a binary encoding mechanism is used to transform the combination test suite generating problem into a gene sequence optimization problem. Meanwhile, a novel global optimization algorithm, cluster searching algorithm (CSA), is developed to solve it. In this paper, the validity and rationality of problem transformation mechanism is verified, and the details of CSA are shown. The simulations illustrate the proposed mechanism is feasible. Moreover, it is a simpler and more efficient test suite generation approach for small-size combinatorial testing problems.
The test suite generation is a key task for combinatorial testing of software. In order to generate high-quality testing data, a cluster searching driven global optimization mechanism is proposed. In this approach, a binary encoding mechanism is used to transform the combination test suite generating problem into a gene sequence optimization problem. Meanwhile, a novel global optimization algorithm, cluster searching algorithm (CSA), is developed to solve it. In this paper, the validity and rationality of problem transformation mechanism is verified, and the details of CSA are shown. The simulations illustrate the proposed mechanism is feasible. Moreover, it is a simpler and more efficient test suite generation approach for small-size combinatorial testing problems.


2017, 43(9): 1636-1643.
doi: 10.16383/j.aas.2017.e160216
摘要:
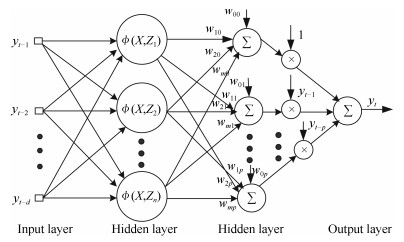
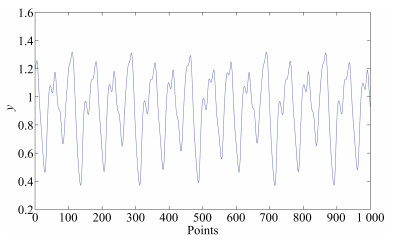
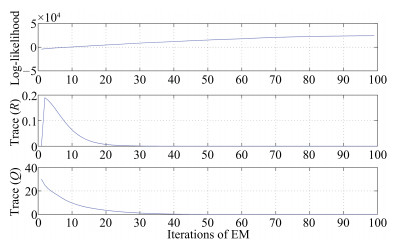
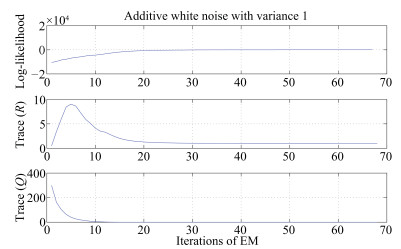
RBF-AR (radial basis function network-based autoregressive) model is reconstructed as a new type of general radial basis function (RBF) neural network, which has additional linear output weight layer in comparison with the traditional three-layer RBF network. The extended Kalman filter (EKF) algorithm for RBF training has low filtering accuracy and divergence because of unknown prior knowledge, such as noise covariance and initial states. To overcome the drawback, the expectation maximization (EM) algorithm is used to estimate the covariance matrices of noises and the initial states. The proposed method, called the EM-EKF (expectation-maximization extended Kalman filter) algorithm, which combines the expectation maximization, extended Kalman filtering and smoothing process, is developed to estimate the parameters of the RBF-AR model, the initial conditions and the noise variances simultaneously. It is shown by the simulation tests that the EM-EKF method for the reconstructed RBF-AR network provides better results than structured nonlinear parameter optimization method (SNPOM) and the EKF, especially in low SNR (signal noise ratio). Moreover, the EM-EKF method can accurately estimate the noise variance. F test indicates there is significant difference between results obtained by the SNPOM and the EM-EKF.
RBF-AR (radial basis function network-based autoregressive) model is reconstructed as a new type of general radial basis function (RBF) neural network, which has additional linear output weight layer in comparison with the traditional three-layer RBF network. The extended Kalman filter (EKF) algorithm for RBF training has low filtering accuracy and divergence because of unknown prior knowledge, such as noise covariance and initial states. To overcome the drawback, the expectation maximization (EM) algorithm is used to estimate the covariance matrices of noises and the initial states. The proposed method, called the EM-EKF (expectation-maximization extended Kalman filter) algorithm, which combines the expectation maximization, extended Kalman filtering and smoothing process, is developed to estimate the parameters of the RBF-AR model, the initial conditions and the noise variances simultaneously. It is shown by the simulation tests that the EM-EKF method for the reconstructed RBF-AR network provides better results than structured nonlinear parameter optimization method (SNPOM) and the EKF, especially in low SNR (signal noise ratio). Moreover, the EM-EKF method can accurately estimate the noise variance. F test indicates there is significant difference between results obtained by the SNPOM and the EM-EKF.


2017, 43(9): 1644-1655.
doi: 10.16383/j.aas.2017.e160241
摘要:
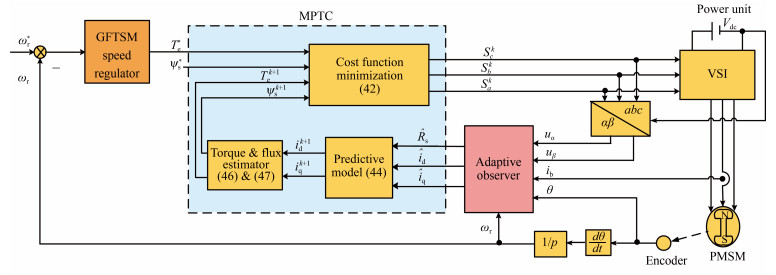
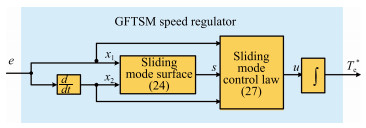
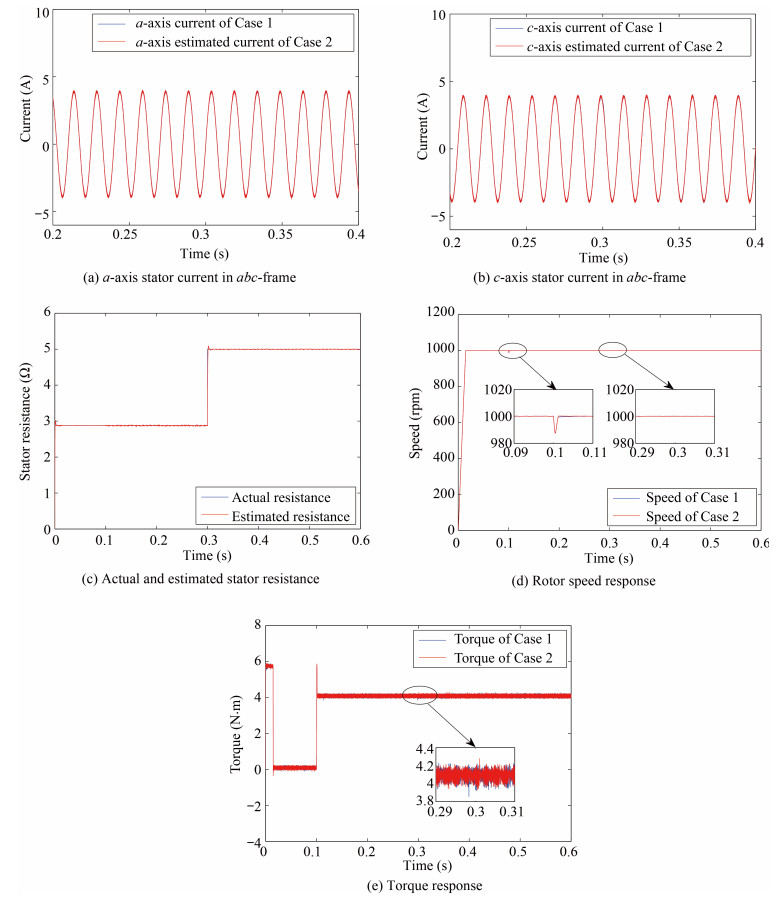
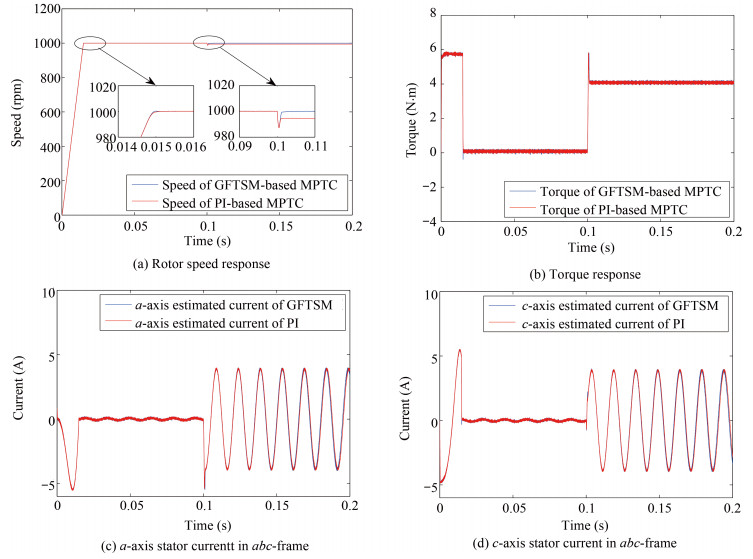
A global fast terminal sliding mode (GFTSM)-based model predictive torque control (MPTC) strategy is developed for permanent magnet synchronous motor (PMSM) drive system with only one phase current sensor. Generally two phase-current sensors are indispensable for MPTC. In response to only one phase current sensor available and the change of stator resistance, a novel adaptive observer for estimating the remaining two phase currents and time-varying stator resistance is proposed to perform MPTC. Moreover, in view of the variation of system parameters and external disturbance, a new GFTSM-based speed regulator is synthesized to enhance the drive system robustness. In this paper, the GFTSM, based on sliding mode theory, employs the fast terminal sliding mode in both the reaching stage and the sliding stage. The resultant GFTSM-based MPTC PMSM drive system with single phase current sensor has excellent dynamical performance which is very close to the GFTSM-based MPTC PMSM drive system with two-phase current sensors. On the other hand, compared with proportional-integral (PI)-based and sliding mode (SM)-based MPTC PMSM drive systems, it possesses better dynamical response and stronger robustness as well as smaller total harmonic distortion (THD) index of three-phase stator currents in the presence of variation of load torque. The simulation results validate the feasibility and effectiveness of the proposed scheme.
A global fast terminal sliding mode (GFTSM)-based model predictive torque control (MPTC) strategy is developed for permanent magnet synchronous motor (PMSM) drive system with only one phase current sensor. Generally two phase-current sensors are indispensable for MPTC. In response to only one phase current sensor available and the change of stator resistance, a novel adaptive observer for estimating the remaining two phase currents and time-varying stator resistance is proposed to perform MPTC. Moreover, in view of the variation of system parameters and external disturbance, a new GFTSM-based speed regulator is synthesized to enhance the drive system robustness. In this paper, the GFTSM, based on sliding mode theory, employs the fast terminal sliding mode in both the reaching stage and the sliding stage. The resultant GFTSM-based MPTC PMSM drive system with single phase current sensor has excellent dynamical performance which is very close to the GFTSM-based MPTC PMSM drive system with two-phase current sensors. On the other hand, compared with proportional-integral (PI)-based and sliding mode (SM)-based MPTC PMSM drive systems, it possesses better dynamical response and stronger robustness as well as smaller total harmonic distortion (THD) index of three-phase stator currents in the presence of variation of load torque. The simulation results validate the feasibility and effectiveness of the proposed scheme.




2017, 43(9): 1656-1664.
doi: 10.16383/j.aas.2017.e150082
摘要:
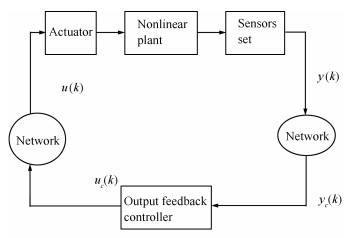
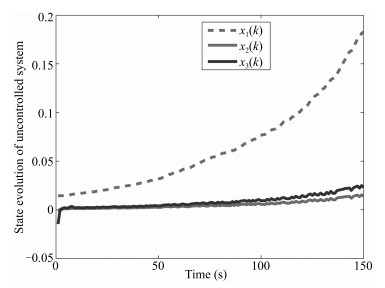
In this paper, the robust H∞-control problem is reported for a class of uncertain discrete-time fuzzy systems with both multiple probabilistic delays and multiple missing measurements and random missing control from the fuzzy controllers to the actuator. A sequence of random variables including accounting for the probabilistic communication delays and the random missing control are thought as mutually independent and obey the Bernoulli distribution. The measurement-missing phenomenon can be assumed to occur stochastically. Assumption that the missing probability for each sensor satisfies a certain probabilistic distribution in the interval [0 1] is given. Much attention is focused on design of H∞ the fuzzy output feedback controllers to ensure that the resulting close-loop Takagi-Sugeno (T-S) system is exponentially stable in the mean square. The developed method makes disturbance rejection attenuation satisfy a given level by means of the H∞-performance index. Intensive analysis is employed to reach the sufficient conditions about the existence of admissible output feedback controllers which satisfies the exponential stability as well as the prescribed H∞ performance. In addition, the cone-complementarity linearization procedure is utilized to transform the controller-design problem into a sequential minimization one which can be solved by the semi-definite program method. Simulation results conform the feasibility as weil as the effectiveness of the proposed design method.
In this paper, the robust H∞-control problem is reported for a class of uncertain discrete-time fuzzy systems with both multiple probabilistic delays and multiple missing measurements and random missing control from the fuzzy controllers to the actuator. A sequence of random variables including accounting for the probabilistic communication delays and the random missing control are thought as mutually independent and obey the Bernoulli distribution. The measurement-missing phenomenon can be assumed to occur stochastically. Assumption that the missing probability for each sensor satisfies a certain probabilistic distribution in the interval [0 1] is given. Much attention is focused on design of H∞ the fuzzy output feedback controllers to ensure that the resulting close-loop Takagi-Sugeno (T-S) system is exponentially stable in the mean square. The developed method makes disturbance rejection attenuation satisfy a given level by means of the H∞-performance index. Intensive analysis is employed to reach the sufficient conditions about the existence of admissible output feedback controllers which satisfies the exponential stability as well as the prescribed H∞ performance. In addition, the cone-complementarity linearization procedure is utilized to transform the controller-design problem into a sequential minimization one which can be solved by the semi-definite program method. Simulation results conform the feasibility as weil as the effectiveness of the proposed design method.




2017, 43(9): 1665-1672.
doi: 10.16383/j.aas.2017.e160260
摘要:
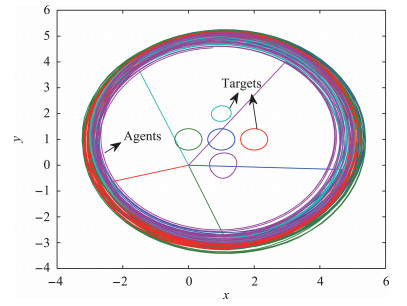
This paper deals with the finite-time distributed rotating encirclement control problem of multi-agent systems, where each agent tracks one target and every target can be tracked by one agent. Firstly, finite-time encirclement tracking protocols are designed for multi-agent systems, and these protocols contain observers for the geometrical center of the targets and estimators for the maximum distance between targets and their geometrical center. Secondly, sufficient conditions for achieving finite-time encirclement tracking are obtained. Finally, simulations are provided to demonstrate the effectiveness of the presented results.
This paper deals with the finite-time distributed rotating encirclement control problem of multi-agent systems, where each agent tracks one target and every target can be tracked by one agent. Firstly, finite-time encirclement tracking protocols are designed for multi-agent systems, and these protocols contain observers for the geometrical center of the targets and estimators for the maximum distance between targets and their geometrical center. Secondly, sufficient conditions for achieving finite-time encirclement tracking are obtained. Finally, simulations are provided to demonstrate the effectiveness of the presented results.




2017, 43(9): 1673-1676.
摘要:
本文统计了2013~2015年信息科学部自动化学科国家杰出青年科学基金(以下简称“杰青基金”)项目申请人代表性论著所属期刊的分布情况.研究结果显示杰青基金申请人“近5年内发表的5篇代表性论著”(以下简称“代表性论著”)的选择与JCR(Journal citation report)期刊影响因子和中科院JCR分区无明显相关,表明基于JCR期刊影响因子和中科院JCR分区所建立的学术评价体系具有一定的局限性.本文的研究结果有望为建立更具有指导意义的、充分符合各研究领域自身特点的期刊评估指标和学术评价体系提供新的思路.
本文统计了2013~2015年信息科学部自动化学科国家杰出青年科学基金(以下简称“杰青基金”)项目申请人代表性论著所属期刊的分布情况.研究结果显示杰青基金申请人“近5年内发表的5篇代表性论著”(以下简称“代表性论著”)的选择与JCR(Journal citation report)期刊影响因子和中科院JCR分区无明显相关,表明基于JCR期刊影响因子和中科院JCR分区所建立的学术评价体系具有一定的局限性.本文的研究结果有望为建立更具有指导意义的、充分符合各研究领域自身特点的期刊评估指标和学术评价体系提供新的思路.









