2016年 第42卷 第7期
2016, 42(7): 965-982.
doi: 10.16383/j.aas.2016.c160239
摘要:
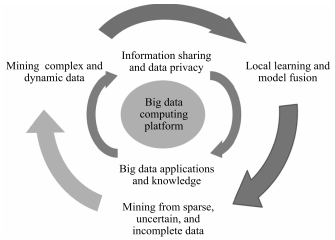
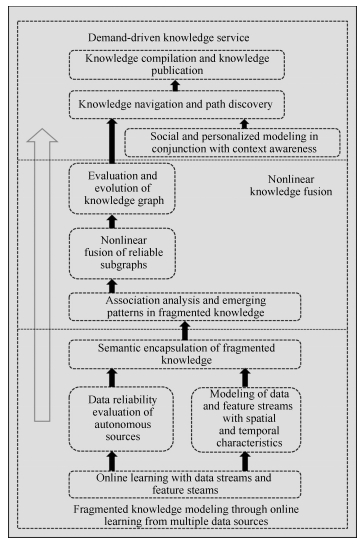
大数据面向异构自治的多源海量数据,旨在挖掘数据间复杂且演化的关联.随着数据采集存储和互联网技术的发展,大数据分析和应用已成为各行各业的研发热点.本文从大数据的本质特征开始,评述现有的几种大数据模型,包括5V,5R,4P和HACE定理,同时从知识建模的角度,介绍一种大数据知识工程模型BigKE来生成大知识,并对大知识的前景进行展望.
大数据面向异构自治的多源海量数据,旨在挖掘数据间复杂且演化的关联.随着数据采集存储和互联网技术的发展,大数据分析和应用已成为各行各业的研发热点.本文从大数据的本质特征开始,评述现有的几种大数据模型,包括5V,5R,4P和HACE定理,同时从知识建模的角度,介绍一种大数据知识工程模型BigKE来生成大知识,并对大知识的前景进行展望.
2016, 42(7): 983-1003.
doi: 10.16383/j.aas.2016.c150619
摘要:
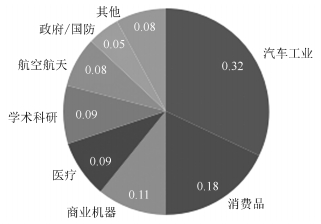
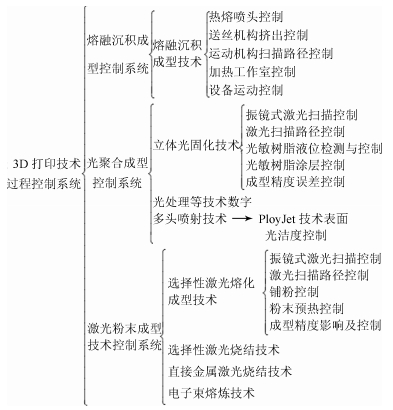
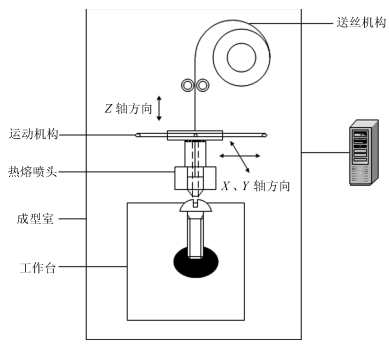
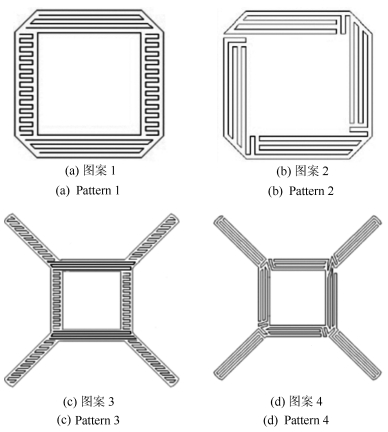
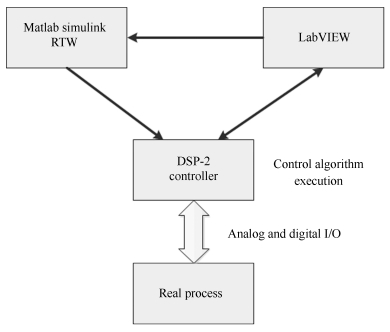
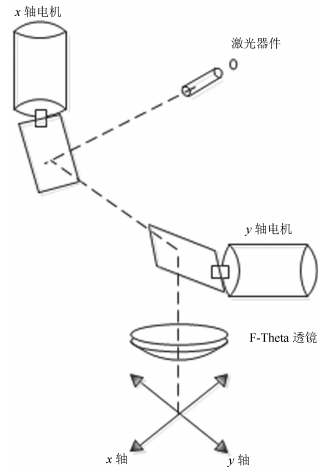
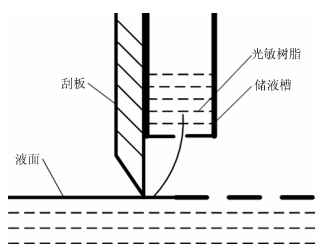
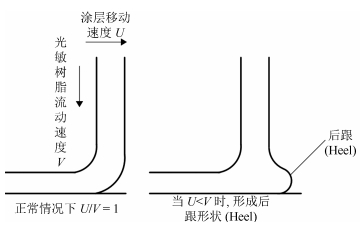
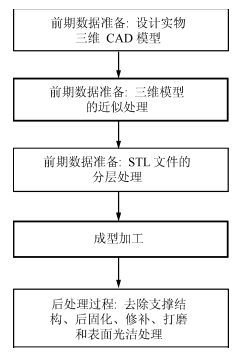
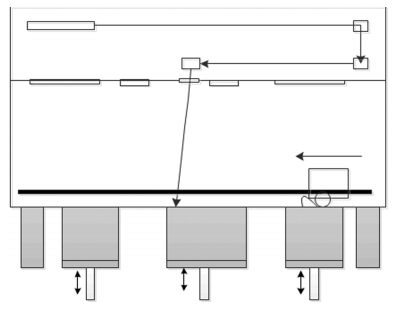
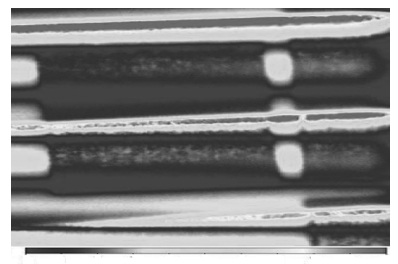
3D打印技术是一种新兴的增材制造技术,许多人认为是一项将要改变世界的“破坏性”技术,并声称该技术将引发新一轮工业革命.本文根据3D打印技术涉及的不同核心成型技术、材料和设备体积等,介绍了3D打印技术的不同分类,综述了主流3D打印过程控制技术,指出了3D打印技术的控制系统存在的问题并提出了产业化进程中的建议和意见.
3D打印技术是一种新兴的增材制造技术,许多人认为是一项将要改变世界的“破坏性”技术,并声称该技术将引发新一轮工业革命.本文根据3D打印技术涉及的不同核心成型技术、材料和设备体积等,介绍了3D打印技术的不同分类,综述了主流3D打印过程控制技术,指出了3D打印技术的控制系统存在的问题并提出了产业化进程中的建议和意见.


2016, 42(7): 1004-1013.
doi: 10.16383/j.aas.2016.c150756
摘要:
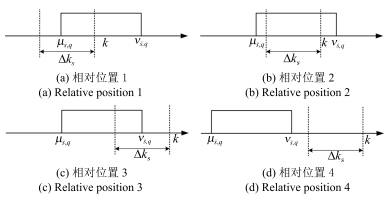
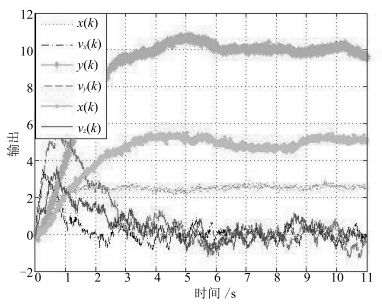
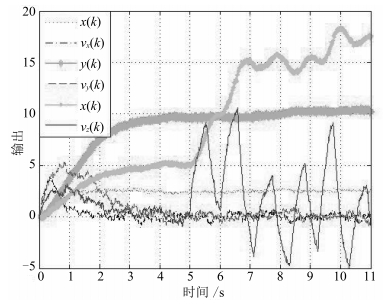
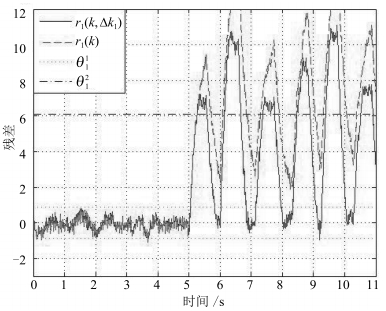
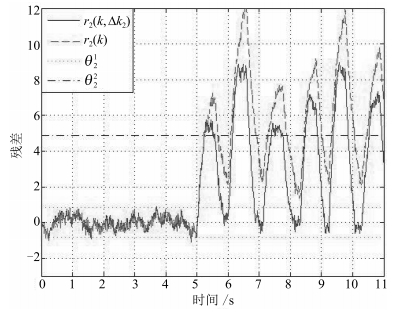
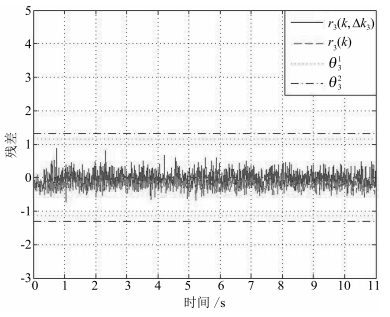
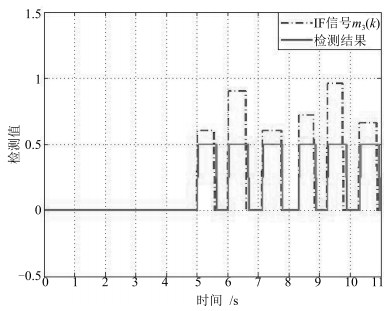
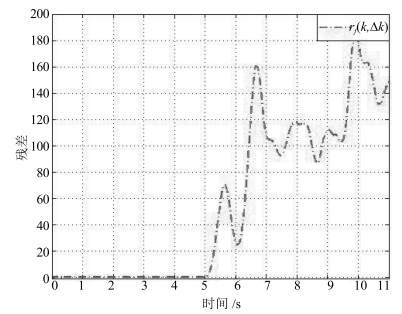
间歇故障(Intermittent faults, IFs)具有随机性,其检测要求在本次间歇故障消失之前检测出间歇故障的发生,在下一次间歇故障发生之前检测出间歇故障的消失.本文针对一类存在未知时变参数摄动的离散线性随机动态系统,研究了其鲁棒间歇故障检测与分离问题.基于降维未知输入观测器,通过引入滑动时间窗口,本文设计了一组与未知时变摄动解耦的结构化截断残差,并提出其存在的一个充分条件.与传统残差相比,截断残差信号更为显著地反映了间歇故障的发生和消失.为满足间歇故障的检测要求,本文提出两个假设检验分别用于检测间歇故障的发生时刻和消失时刻,并给出了一个详细算法.最后,在沿参考轨道运行的卫星模型上对所述方法进行了仿真实验,结果表明该方法能够有效检测出间歇故障的所有发生时刻和消失时刻,并准确实现故障分离.
间歇故障(Intermittent faults, IFs)具有随机性,其检测要求在本次间歇故障消失之前检测出间歇故障的发生,在下一次间歇故障发生之前检测出间歇故障的消失.本文针对一类存在未知时变参数摄动的离散线性随机动态系统,研究了其鲁棒间歇故障检测与分离问题.基于降维未知输入观测器,通过引入滑动时间窗口,本文设计了一组与未知时变摄动解耦的结构化截断残差,并提出其存在的一个充分条件.与传统残差相比,截断残差信号更为显著地反映了间歇故障的发生和消失.为满足间歇故障的检测要求,本文提出两个假设检验分别用于检测间歇故障的发生时刻和消失时刻,并给出了一个详细算法.最后,在沿参考轨道运行的卫星模型上对所述方法进行了仿真实验,结果表明该方法能够有效检测出间歇故障的所有发生时刻和消失时刻,并准确实现故障分离.
2016, 42(7): 1014-1021.
doi: 10.16383/j.aas.2016.c150736
摘要:
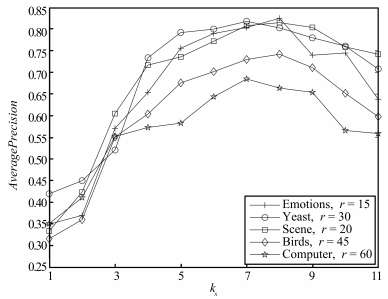
在实际应用场景中越来越多的数据具有多标签的特性,且特征维度较高,包含大量冗余信息.为提高多标签数据挖掘的效率,多标签特征提取已经成为当前研究的热点.本文采用去噪自编码器获取多标签数据特征空间的鲁棒表达,在此基础上结合超图学习理论,融合多个标签对样本间几何关系的影响以提升特征提取的性能,构建多标签数据样本间几何关系所对应超图的Laplacian矩阵,并通过Laplacian矩阵的特征值分解得到低维投影空间.实验结果证明了本文所提出的算法在分类性能上是有效可行的.
在实际应用场景中越来越多的数据具有多标签的特性,且特征维度较高,包含大量冗余信息.为提高多标签数据挖掘的效率,多标签特征提取已经成为当前研究的热点.本文采用去噪自编码器获取多标签数据特征空间的鲁棒表达,在此基础上结合超图学习理论,融合多个标签对样本间几何关系的影响以提升特征提取的性能,构建多标签数据样本间几何关系所对应超图的Laplacian矩阵,并通过Laplacian矩阵的特征值分解得到低维投影空间.实验结果证明了本文所提出的算法在分类性能上是有效可行的.

2016, 42(7): 1022-1029.
doi: 10.16383/j.aas.2016.c150661
摘要:
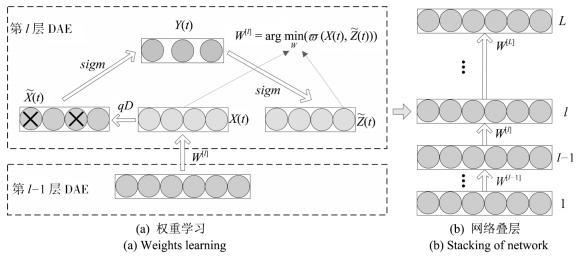
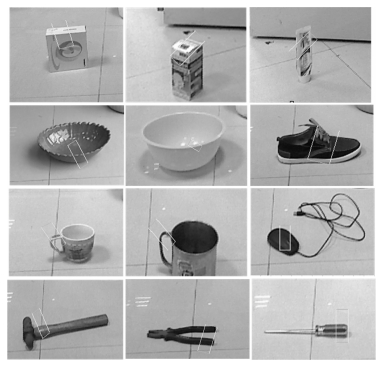
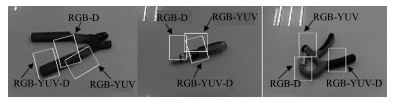
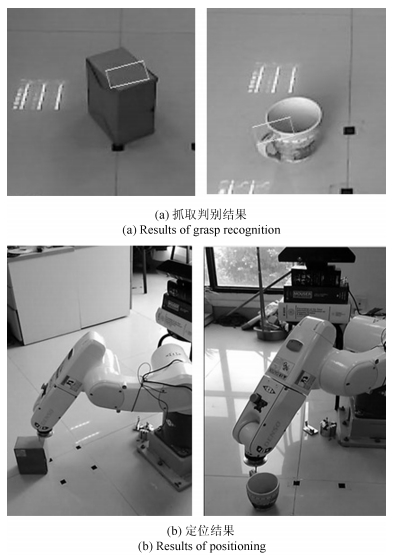
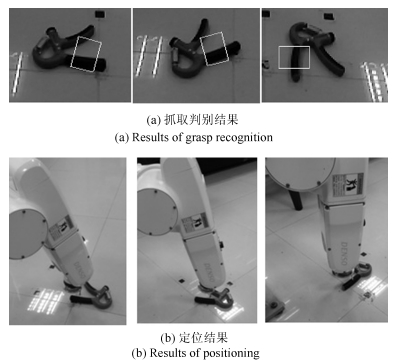
针对智能机器人抓取判别问题,研究多模特征深度学习与融合方法.该方法将测试特征分布偏离训练特征视为一类噪化,引入带稀疏约束的降噪自动编码(Denoising auto-encoding, DAE),实现网络权值学习;并以叠层融合策略,获取初始多模特征的深层抽象表达,两种手段相结合旨在提高深度网络的鲁棒性和抓取判别精确性.实验采用深度摄像机与6自由度工业机器人组建测试平台,对不同类别目标进行在线对比实验.结果表明,设计的多模特征深度学习依据人的抓取习惯,实现最优抓取判别,并且机器人成功实施抓取定位,研究方法对新目标具备良好的抓取判别能力.
针对智能机器人抓取判别问题,研究多模特征深度学习与融合方法.该方法将测试特征分布偏离训练特征视为一类噪化,引入带稀疏约束的降噪自动编码(Denoising auto-encoding, DAE),实现网络权值学习;并以叠层融合策略,获取初始多模特征的深层抽象表达,两种手段相结合旨在提高深度网络的鲁棒性和抓取判别精确性.实验采用深度摄像机与6自由度工业机器人组建测试平台,对不同类别目标进行在线对比实验.结果表明,设计的多模特征深度学习依据人的抓取习惯,实现最优抓取判别,并且机器人成功实施抓取定位,研究方法对新目标具备良好的抓取判别能力.


2016, 42(7): 1030-1039.
doi: 10.16383/j.aas.2016.c150629
摘要:
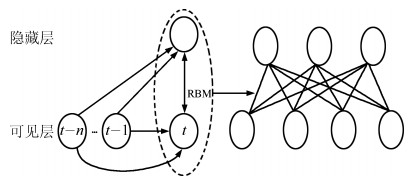
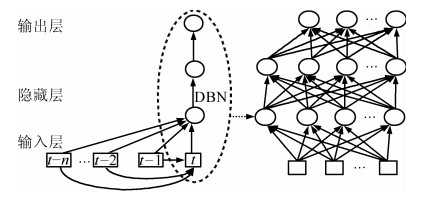
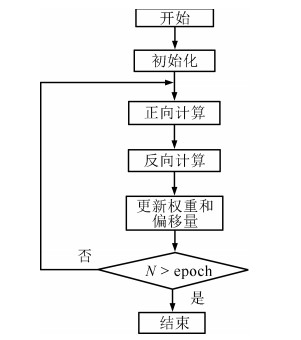
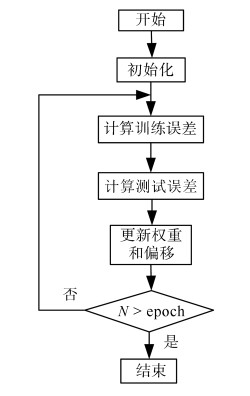
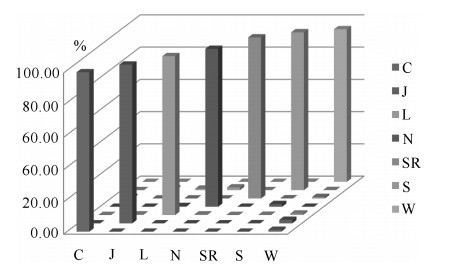
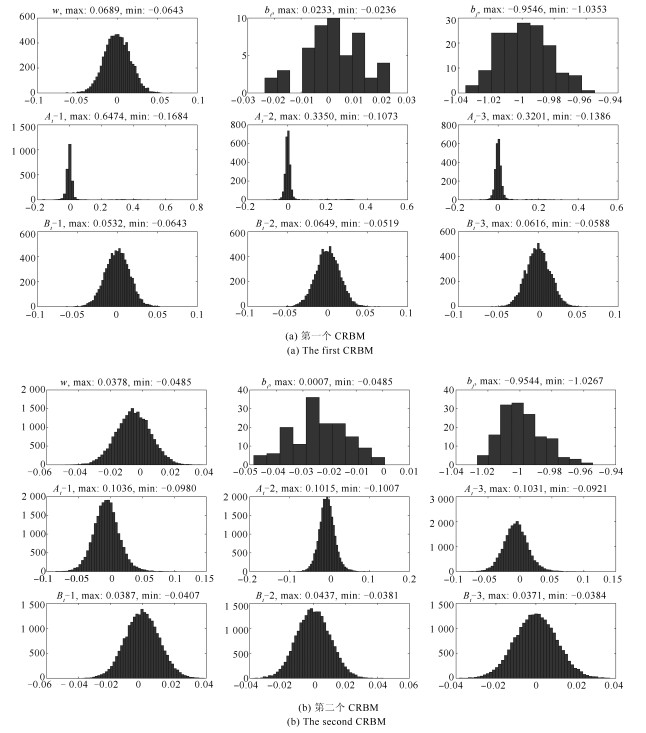
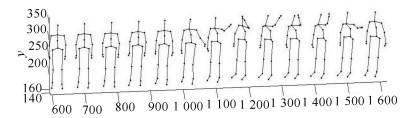
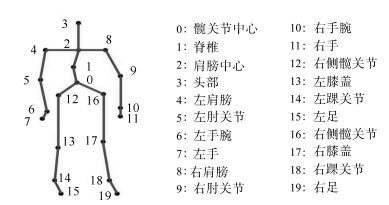
在线人体动作识别是人体动作识别的最终目标,但由于如何分割动作序列是一个待解决的难点问题,因此目前大多数人体动作识别方法仅关注在分割好的动作序列中进行动作识别,未关注在线人体动作识别问题.本文针对这一问题,提出了一种可以完成在线人体动作识别的时序深度置信网络(Temporal deep belief network, TDBN)模型.该模型充分利用动作序列前后帧提供的上下文信息,解决了目前深度置信网络模型仅能识别静态图像的问题,不仅大大提高了动作识别的准确率,而且由于该模型不需要人为对动作序列进行分割,可以从动作进行中的任意时刻开始识别,实现了真正意义上的在线动作识别,为实际应用打下了较好的理论基础.
在线人体动作识别是人体动作识别的最终目标,但由于如何分割动作序列是一个待解决的难点问题,因此目前大多数人体动作识别方法仅关注在分割好的动作序列中进行动作识别,未关注在线人体动作识别问题.本文针对这一问题,提出了一种可以完成在线人体动作识别的时序深度置信网络(Temporal deep belief network, TDBN)模型.该模型充分利用动作序列前后帧提供的上下文信息,解决了目前深度置信网络模型仅能识别静态图像的问题,不仅大大提高了动作识别的准确率,而且由于该模型不需要人为对动作序列进行分割,可以从动作进行中的任意时刻开始识别,实现了真正意义上的在线动作识别,为实际应用打下了较好的理论基础.



2016, 42(7): 1040-1052.
doi: 10.16383/j.aas.2016.c150766
摘要:
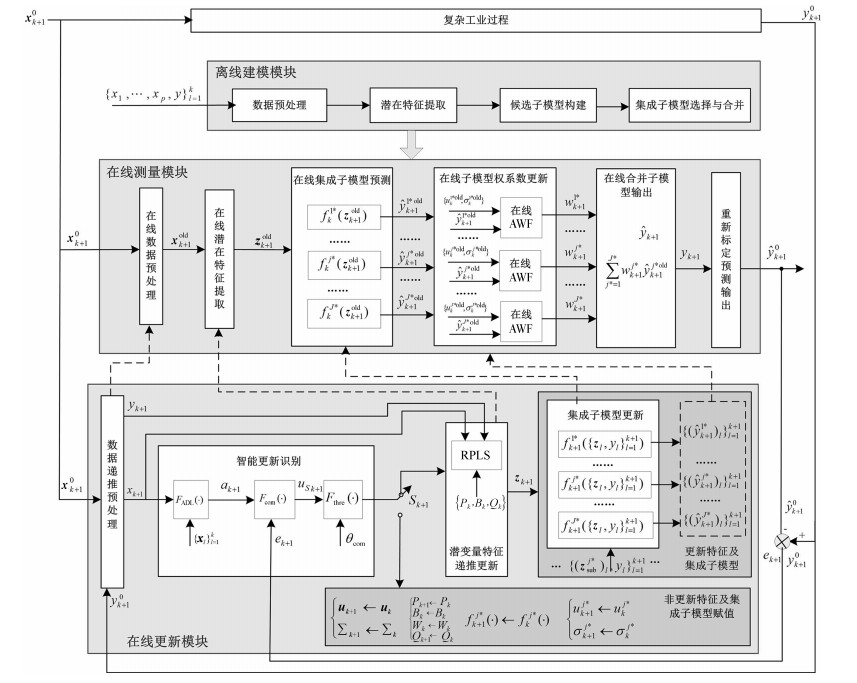
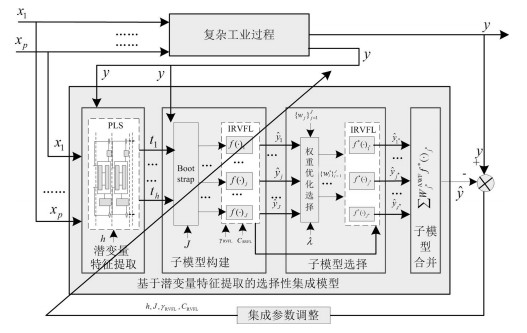
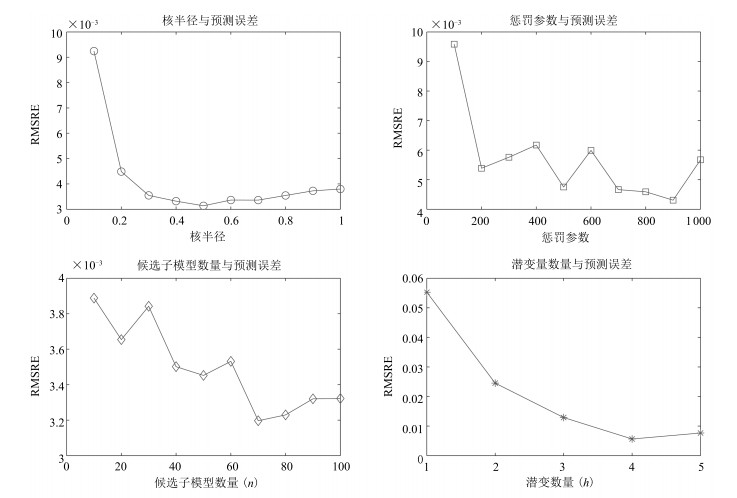
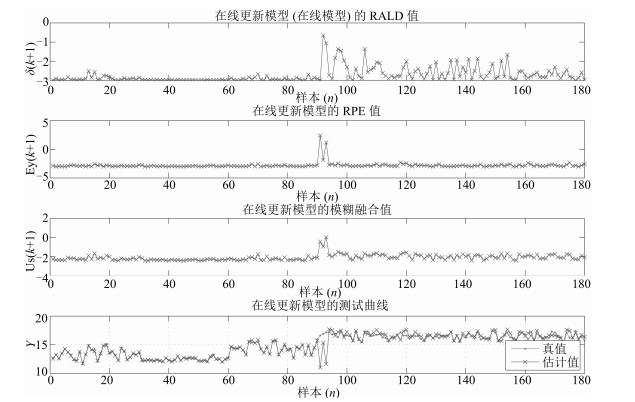
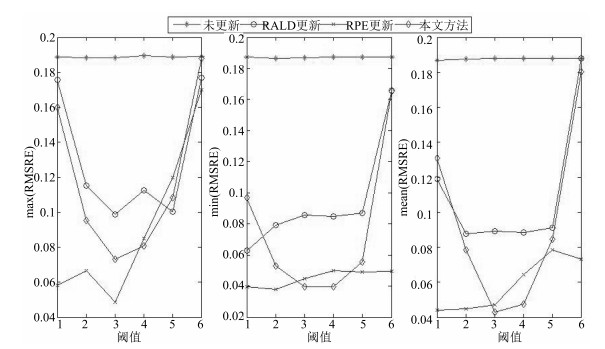
选择表征建模对象特性漂移的新样本对软测量模型进行自适应更新,能够降低模型复杂度和运行消耗,提高模型可解释性和预测精度.针对新样本近似线性依靠程度(Approximate linear dependence, ALD)和预测误差(Prediction error, PE)等指标只能片面反映建模对象的漂移程度,领域专家结合具体工业过程需要依据上述指标和自身积累经验进行更新样本的有效识别等问题,本文提出了基于更新样本智能识别算法的自适应集成建模策略.首先,基于历史数据离线建立基于改进随机向量泛函连接网络(Improved random vector functional-link networks, IRVFL)的选择性集成模型;然后,基于集成子模型对新样本进行预测输出后采用在线自适应加权算法(On-line adaptive weighting fusion, OLAWF)对集成子模型权重进行更新,实现在线测量阶段对建模对象特性变化的动态自适应;接着基于领域专家知识构建模糊推理模型对新样本相对ALD(Relative ALD, RALD)值和相对PE(Relative PE, RPE)值进行融合,实现更新样本智能识别,构建新的建模样本库;最后实现集成模型的在线自适应更新.采用合成数据仿真验证了所提算法的合理性和有效性.
选择表征建模对象特性漂移的新样本对软测量模型进行自适应更新,能够降低模型复杂度和运行消耗,提高模型可解释性和预测精度.针对新样本近似线性依靠程度(Approximate linear dependence, ALD)和预测误差(Prediction error, PE)等指标只能片面反映建模对象的漂移程度,领域专家结合具体工业过程需要依据上述指标和自身积累经验进行更新样本的有效识别等问题,本文提出了基于更新样本智能识别算法的自适应集成建模策略.首先,基于历史数据离线建立基于改进随机向量泛函连接网络(Improved random vector functional-link networks, IRVFL)的选择性集成模型;然后,基于集成子模型对新样本进行预测输出后采用在线自适应加权算法(On-line adaptive weighting fusion, OLAWF)对集成子模型权重进行更新,实现在线测量阶段对建模对象特性变化的动态自适应;接着基于领域专家知识构建模糊推理模型对新样本相对ALD(Relative ALD, RALD)值和相对PE(Relative PE, RPE)值进行融合,实现更新样本智能识别,构建新的建模样本库;最后实现集成模型的在线自适应更新.采用合成数据仿真验证了所提算法的合理性和有效性.

2016, 42(7): 1053-1064.
doi: 10.16383/j.aas.2016.c150320
摘要:
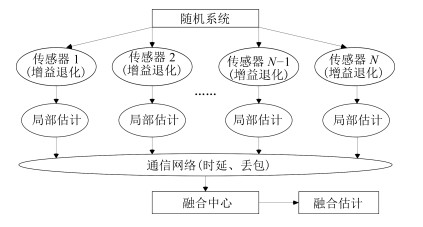
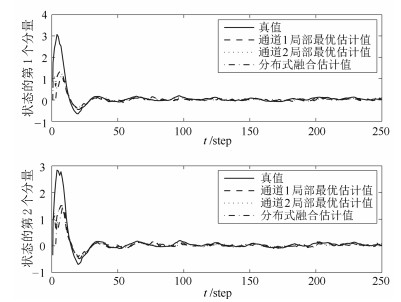
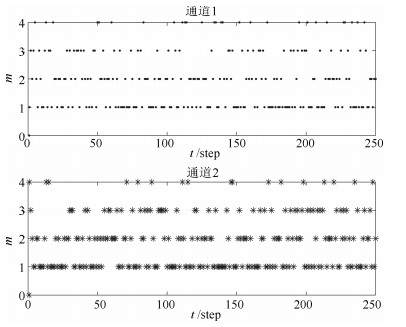
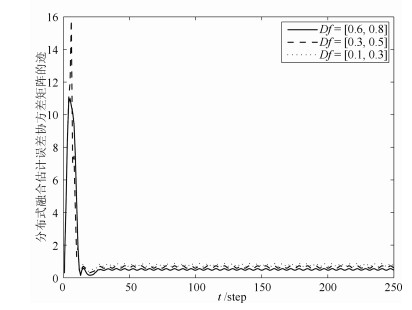
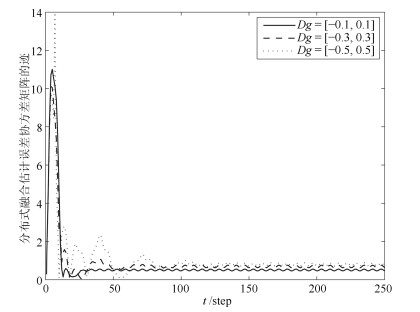
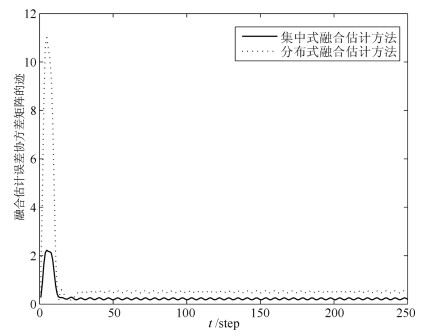
研究了具有传感器增益退化、模型不确定性、数据传输时延和丢包的网络化多传感器分布式融合估计问题,模型的不确定性描述为系统矩阵受到随机扰动,传感器增益退化现象通过统计特性已知的随机变量来描述,随机时延和丢包现象存在于局部最优状态估计向融合中心传输的过程中.首先,设计了一种局部最优无偏估计器,然后将传输时延描述为随机过程,并在融合中心端建立符合存储规则的时延-丢包模型,利用最优线性无偏估计方法,导出最小方差意义下的分布式融合估计器.最后,通过算例仿真证明所设计融合估计器的有效性.
研究了具有传感器增益退化、模型不确定性、数据传输时延和丢包的网络化多传感器分布式融合估计问题,模型的不确定性描述为系统矩阵受到随机扰动,传感器增益退化现象通过统计特性已知的随机变量来描述,随机时延和丢包现象存在于局部最优状态估计向融合中心传输的过程中.首先,设计了一种局部最优无偏估计器,然后将传输时延描述为随机过程,并在融合中心端建立符合存储规则的时延-丢包模型,利用最优线性无偏估计方法,导出最小方差意义下的分布式融合估计器.最后,通过算例仿真证明所设计融合估计器的有效性.
2016, 42(7): 1065-1076.
doi: 10.16383/j.aas.2016.c150557
摘要:
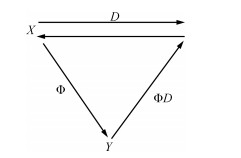
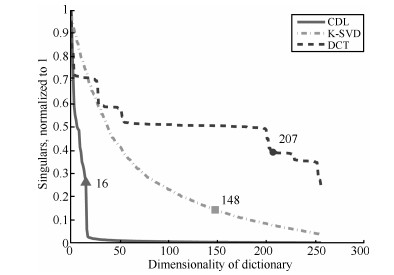
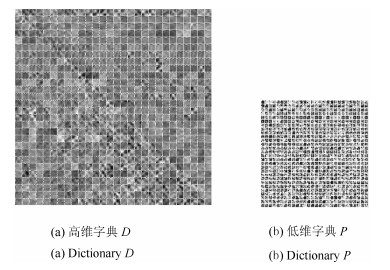
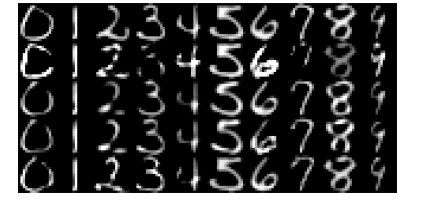
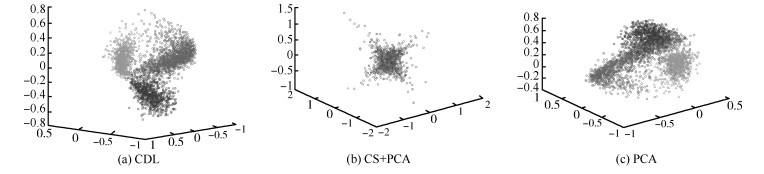
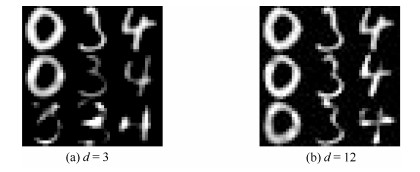
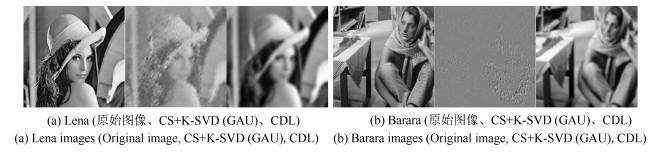
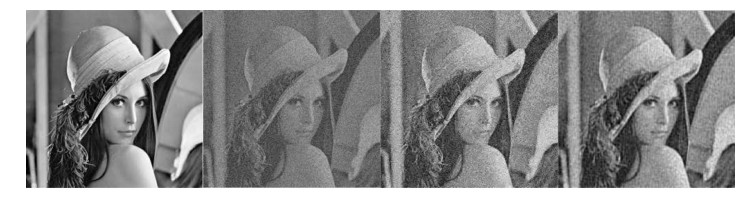
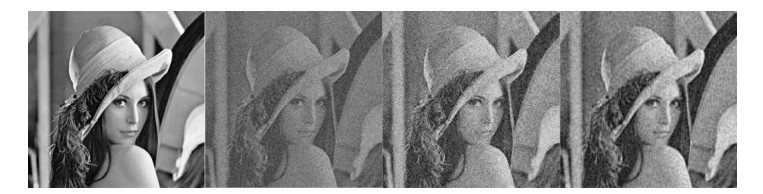
目前,众多的数据降维(Dimensionality reduction, DR)方法(如经典的PCA(Principle component analysis), ISOMAP(Isometric mapping))能够使降维后的数据保留原始信号的重要特征,但是从降维后的数据中很好地恢复出原始信号仍旧是一个挑战.近年来,稀疏表示(Sparse representation, SR)在信号重构研究中受到广泛关注,信号可以利用过完备字典中少数原子的线性组合来描述.本文提出一种基于字典学习的非线性降维方法.从高维输入信号到低维特征的降维过程中,期望一些重要的几何特征(内积、距离和夹角)得以保留,同时又能够从低维数据中恢复出原始信号.为达此目的,本文采用CDL(Concentrated dictionary learning)算法训练一个字典对(高维字典D和低维字典P),使高维原始信号的能量能够聚集于低维子空间中.字典D用来获取稀疏表示系数,字典P是D的直接降维采样,CDL算法能够保证P聚集D中的大部分能量.这样,信号的降维与恢复问题就转变为字典对的训练问题,信号的降维即为从D到P的能量保留过程.实验表明:CDL可在RIP(Restricted isomery property)条件的限制之外具有一定的信号重建能力,能在更低的维度条件下恢复图像,优于传统的压缩感知方法.此外,在噪声较大的情况下,CDL图像压缩效果优于JPEG2000.
目前,众多的数据降维(Dimensionality reduction, DR)方法(如经典的PCA(Principle component analysis), ISOMAP(Isometric mapping))能够使降维后的数据保留原始信号的重要特征,但是从降维后的数据中很好地恢复出原始信号仍旧是一个挑战.近年来,稀疏表示(Sparse representation, SR)在信号重构研究中受到广泛关注,信号可以利用过完备字典中少数原子的线性组合来描述.本文提出一种基于字典学习的非线性降维方法.从高维输入信号到低维特征的降维过程中,期望一些重要的几何特征(内积、距离和夹角)得以保留,同时又能够从低维数据中恢复出原始信号.为达此目的,本文采用CDL(Concentrated dictionary learning)算法训练一个字典对(高维字典D和低维字典P),使高维原始信号的能量能够聚集于低维子空间中.字典D用来获取稀疏表示系数,字典P是D的直接降维采样,CDL算法能够保证P聚集D中的大部分能量.这样,信号的降维与恢复问题就转变为字典对的训练问题,信号的降维即为从D到P的能量保留过程.实验表明:CDL可在RIP(Restricted isomery property)条件的限制之外具有一定的信号重建能力,能在更低的维度条件下恢复图像,优于传统的压缩感知方法.此外,在噪声较大的情况下,CDL图像压缩效果优于JPEG2000.






2016, 42(7): 1077-1089.
doi: 10.16383/j.aas.2016.c150493
摘要:
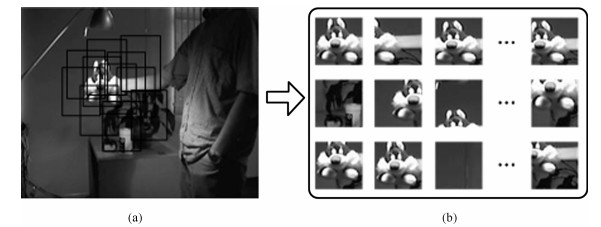
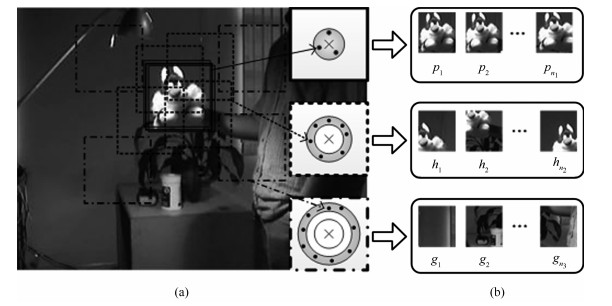
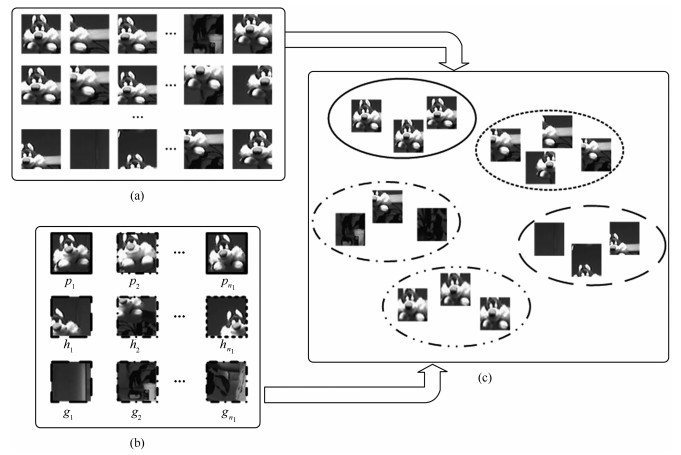
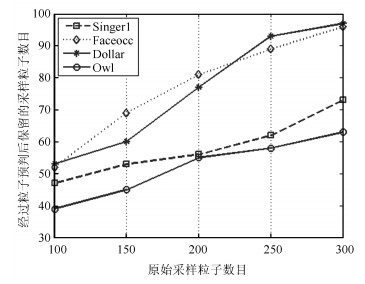
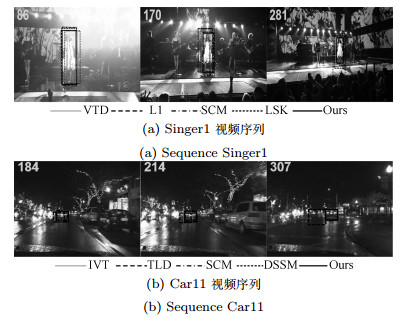
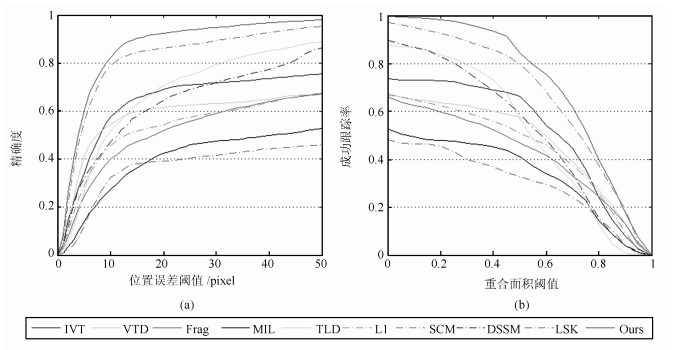
本文在粒子滤波框架下提出一种基于稀疏子空间选择的两步在线跟踪方法.在跟踪的第一步,利用稀疏子空间选择算法筛选出与目标状态相似性较高的候选区域,并将目标与背景间的过渡区域定义为单独的类别以降低目标发生漂移的可能;第二步则通过构建有效的观测模型计算候选区域与目标状态间的相似性,其中相似性函数综合考虑二者在整体和局部特征上的相似性,且将目标的原始状态和当前状态都作为参考,因此增强了观测模型的可靠性;最后利用最大后验概率估计目标状态.此外,该算法通过对目标数据的更新来适应目标的表观变化.实验结果表明该算法能有效处理目标跟踪中的遮挡、运动模糊、光流与尺度变化等问题,与当前流行的9种跟踪方法在多个测试视频上的对比结果验证了该算法的有效性.
本文在粒子滤波框架下提出一种基于稀疏子空间选择的两步在线跟踪方法.在跟踪的第一步,利用稀疏子空间选择算法筛选出与目标状态相似性较高的候选区域,并将目标与背景间的过渡区域定义为单独的类别以降低目标发生漂移的可能;第二步则通过构建有效的观测模型计算候选区域与目标状态间的相似性,其中相似性函数综合考虑二者在整体和局部特征上的相似性,且将目标的原始状态和当前状态都作为参考,因此增强了观测模型的可靠性;最后利用最大后验概率估计目标状态.此外,该算法通过对目标数据的更新来适应目标的表观变化.实验结果表明该算法能有效处理目标跟踪中的遮挡、运动模糊、光流与尺度变化等问题,与当前流行的9种跟踪方法在多个测试视频上的对比结果验证了该算法的有效性.





2016, 42(7): 1090-1099.
doi: 10.16383/j.aas.2016.c150627
摘要:
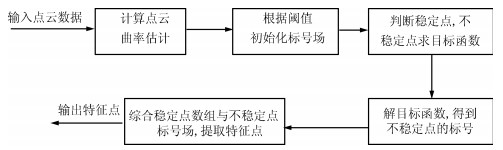
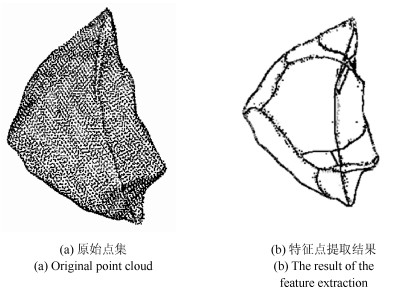
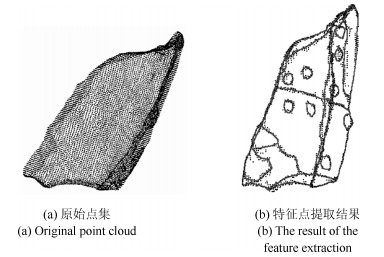
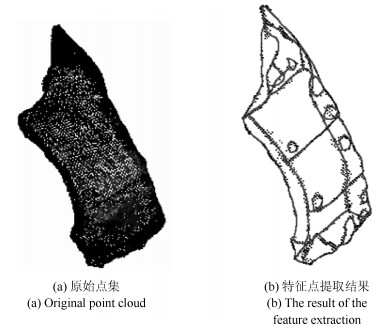
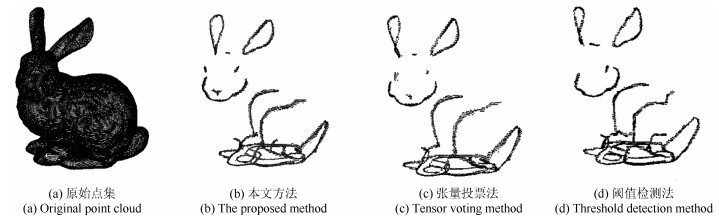
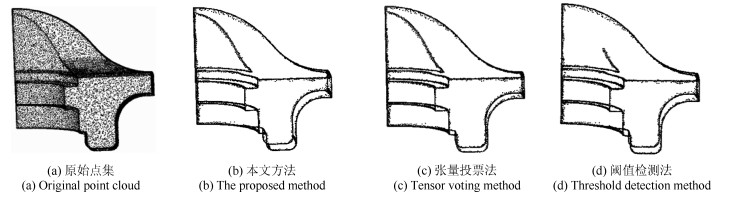
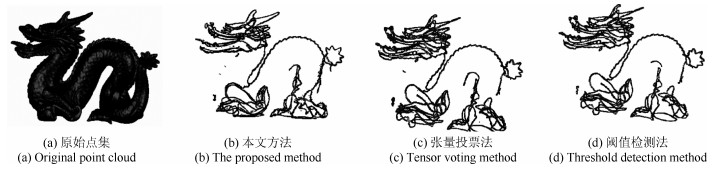
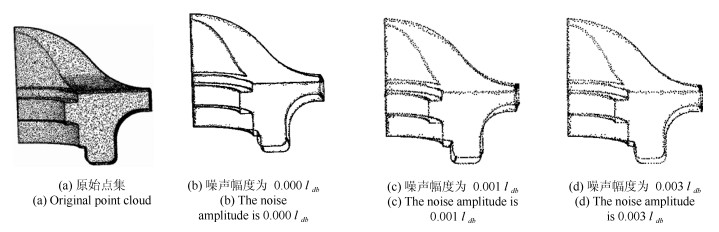
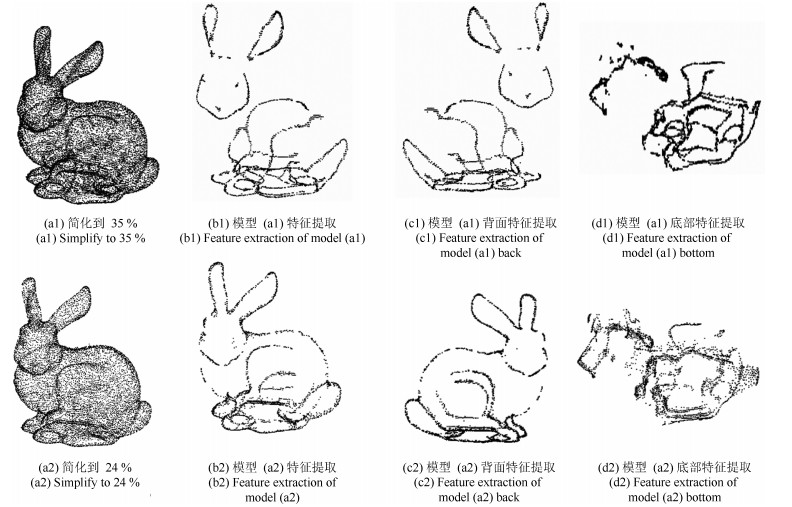
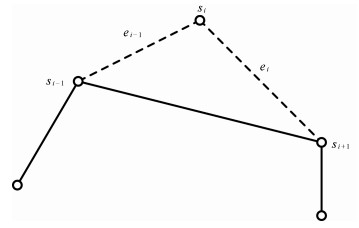
为了精确提取点云数据中的特征信息,针对激光扫描获取的三维散乱点云数据,提出一种基于马尔科夫随机场(Markov random field, MRF)的散乱点云特征提取方法.首先,根据散乱点的曲率估计及阈值初始化点标号并判定稳定点,将稳定点标记存储在数组中;然后,将优化不稳定点的标号问题转化为随机场标号的能量函数问题,引用贝叶斯估计求后验概率分布函数及MAP-MRF(Maximum a posteriori-Markov random field)框架归约得到目标函数;最后,根据图割法α-expansion算法,利用标号调整过程中标号集相对能量变化得到不稳定点的最优标号集,将其与存储稳定点的数组综合,根据点标号提取特征点.实验结果表明,该方法简单、高效、无需人工调参,能够依据全局能量的变化自适应提取特征,特征提取结果令人满意.
为了精确提取点云数据中的特征信息,针对激光扫描获取的三维散乱点云数据,提出一种基于马尔科夫随机场(Markov random field, MRF)的散乱点云特征提取方法.首先,根据散乱点的曲率估计及阈值初始化点标号并判定稳定点,将稳定点标记存储在数组中;然后,将优化不稳定点的标号问题转化为随机场标号的能量函数问题,引用贝叶斯估计求后验概率分布函数及MAP-MRF(Maximum a posteriori-Markov random field)框架归约得到目标函数;最后,根据图割法α-expansion算法,利用标号调整过程中标号集相对能量变化得到不稳定点的最优标号集,将其与存储稳定点的数组综合,根据点标号提取特征点.实验结果表明,该方法简单、高效、无需人工调参,能够依据全局能量的变化自适应提取特征,特征提取结果令人满意.
2016, 42(7): 1100-1112.
doi: 10.16383/j.aas.2016.c150188
摘要:
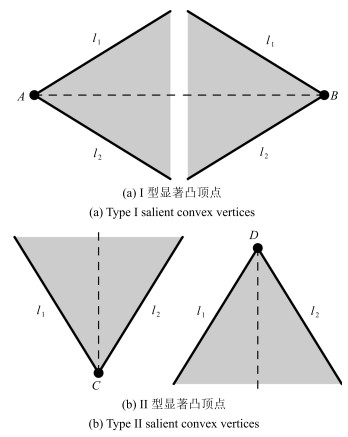
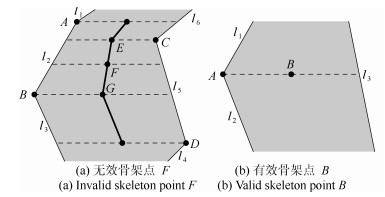
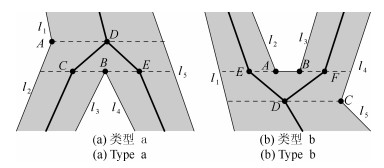
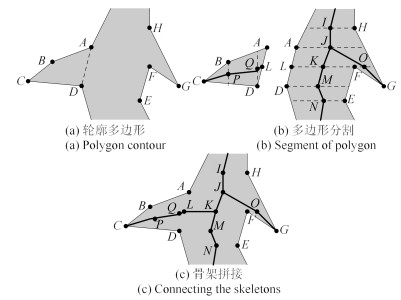
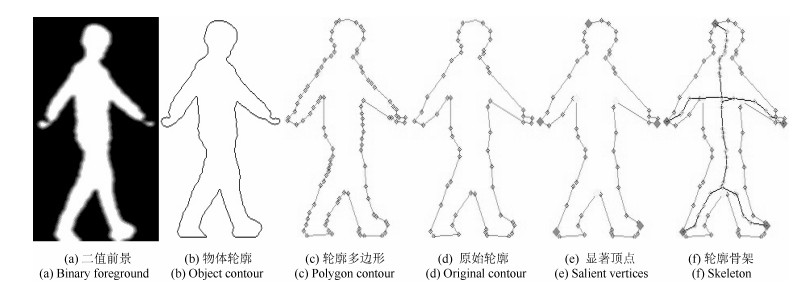
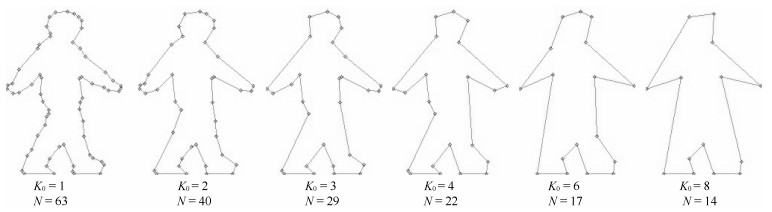
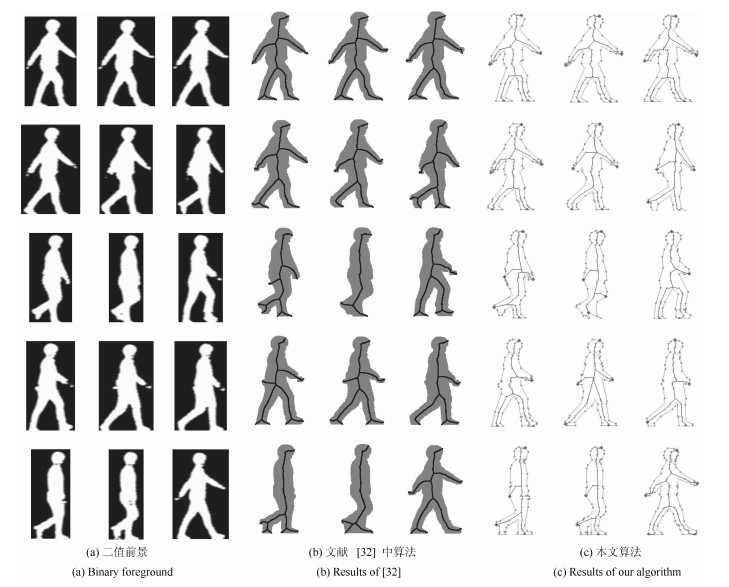
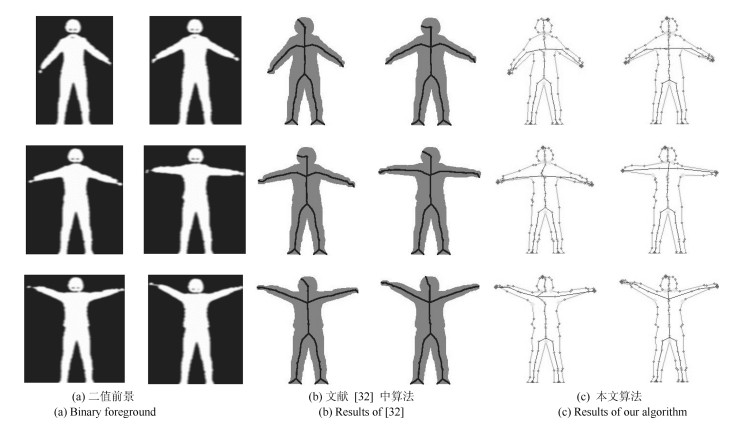
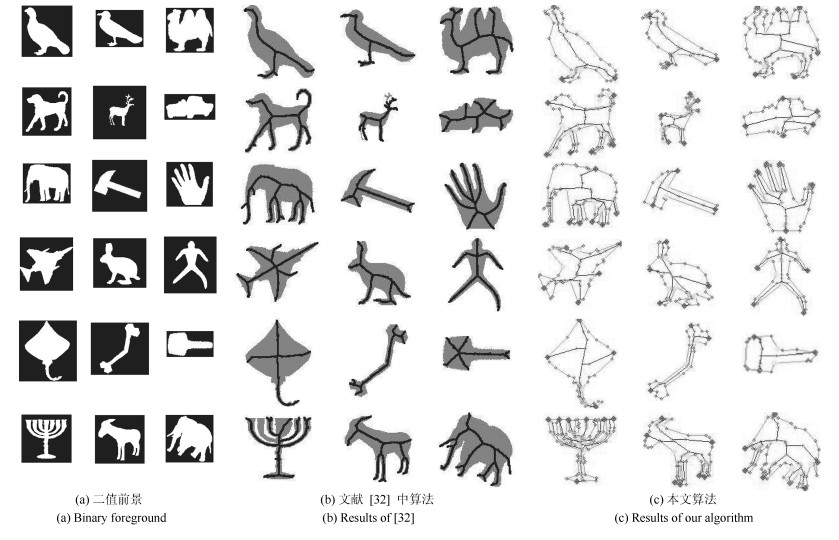
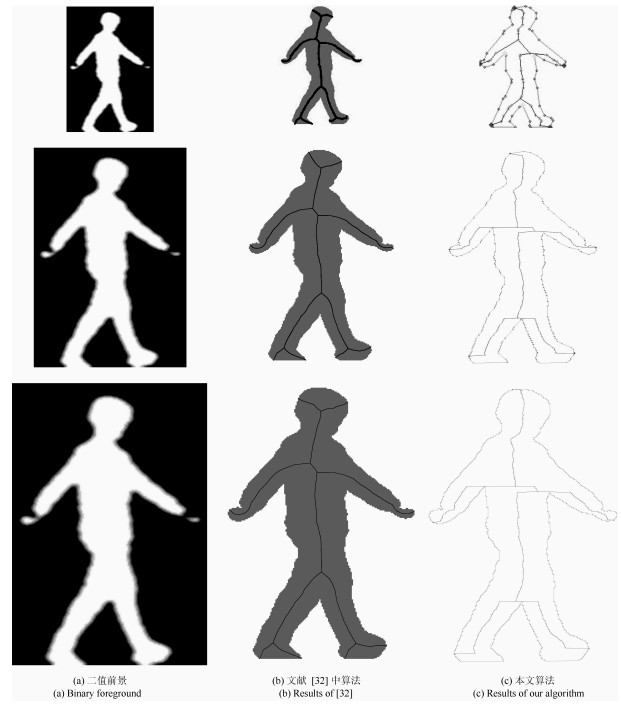
提出了一种快速的骨架提取算法.该方法首先在轮廓离散曲线演化的基础上,根据显著凸顶点的类型将轮廓多边形进行分块,得到一个主分支轮廓和多个水平分支轮廓;然后分别利用水平截线法和垂直截线法提取骨架的主分支和水平分支;最后将水平分支拼接在主分支上,得到完整的骨架.实验结果表明,该骨架提取算法可以得到连通的骨架,并在Kimia数据集上取得了较好的效果.此外,算法在自然图像上的效果也很好,尤其适用于视频中的行人骨架提取.与经典骨架提取算法相比,该算法的时间复杂度较低,可以满足实时处理的要求.
提出了一种快速的骨架提取算法.该方法首先在轮廓离散曲线演化的基础上,根据显著凸顶点的类型将轮廓多边形进行分块,得到一个主分支轮廓和多个水平分支轮廓;然后分别利用水平截线法和垂直截线法提取骨架的主分支和水平分支;最后将水平分支拼接在主分支上,得到完整的骨架.实验结果表明,该骨架提取算法可以得到连通的骨架,并在Kimia数据集上取得了较好的效果.此外,算法在自然图像上的效果也很好,尤其适用于视频中的行人骨架提取.与经典骨架提取算法相比,该算法的时间复杂度较低,可以满足实时处理的要求.

2016, 42(7): 1113-1124.
doi: 10.16383/j.aas.2016.c150559
摘要:
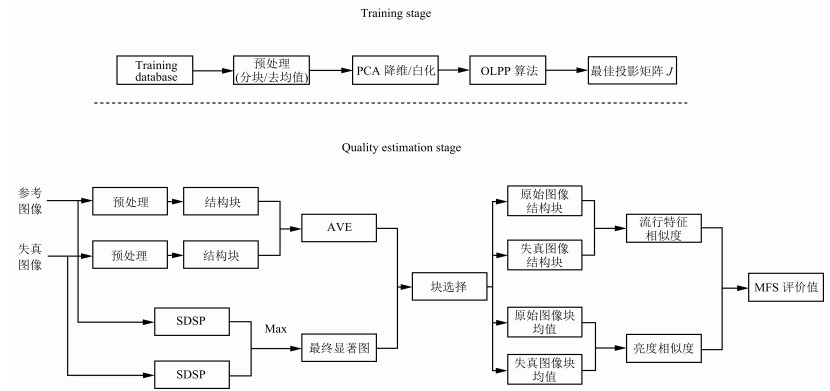
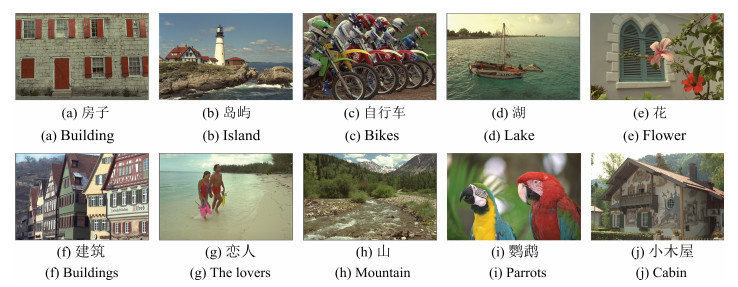
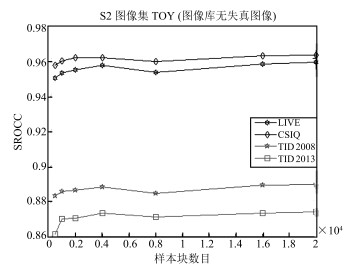
图像质量评价(Image quality assessment, IQA)的目标是利用设计的计算模型得到与主观评价一致的结果,而人类视觉感知特性是感知图像质量评价的关键.大量研究发现,认知流形和拓扑连续性是人类感知的基础即人类感知局限在低维流形之上.基于图像低维流形特征分析,本文提出了基于流形特征相似度(Manifold feature similarity, MFS)的全参考图像质量评价方法.首先,利用正交局部保持投影算法来模拟大脑的视觉处理过程获取最佳映射矩阵进而得到图像的低维流形特征,通过流形特征的相似度来表征两幅图像的结构差异,从而反映感知质量上的差异.其次,考虑亮度失真对人眼视觉感知的影响,通过图像块均值计算亮度相似度并用于评价图像的亮度失真;最后,结合两个相似度得到图像的客观质量评价值.在四个公开图像测试库上的实验结果表明,所提出方法与现有代表性的图像质量方法相比总体上具有更好的评价结果.
图像质量评价(Image quality assessment, IQA)的目标是利用设计的计算模型得到与主观评价一致的结果,而人类视觉感知特性是感知图像质量评价的关键.大量研究发现,认知流形和拓扑连续性是人类感知的基础即人类感知局限在低维流形之上.基于图像低维流形特征分析,本文提出了基于流形特征相似度(Manifold feature similarity, MFS)的全参考图像质量评价方法.首先,利用正交局部保持投影算法来模拟大脑的视觉处理过程获取最佳映射矩阵进而得到图像的低维流形特征,通过流形特征的相似度来表征两幅图像的结构差异,从而反映感知质量上的差异.其次,考虑亮度失真对人眼视觉感知的影响,通过图像块均值计算亮度相似度并用于评价图像的亮度失真;最后,结合两个相似度得到图像的客观质量评价值.在四个公开图像测试库上的实验结果表明,所提出方法与现有代表性的图像质量方法相比总体上具有更好的评价结果.